Embed Size (px)
Citation preview
ROBOT BEHAVIOUR CONTROL
SUCCESSFUL TRIAL OF MARKERLESS MOTION CAPTURE TECHNOLOGY
Student E.E. Shelomentsev Group 8Е00Scientific supervisor Т.V. AlexandrovaLanguage supervisor T.I.Butakova
Plan
• Introduction
• Methodology
• Markerless Motion Capture
• HAMMER architecture
• Results
• Conclusion
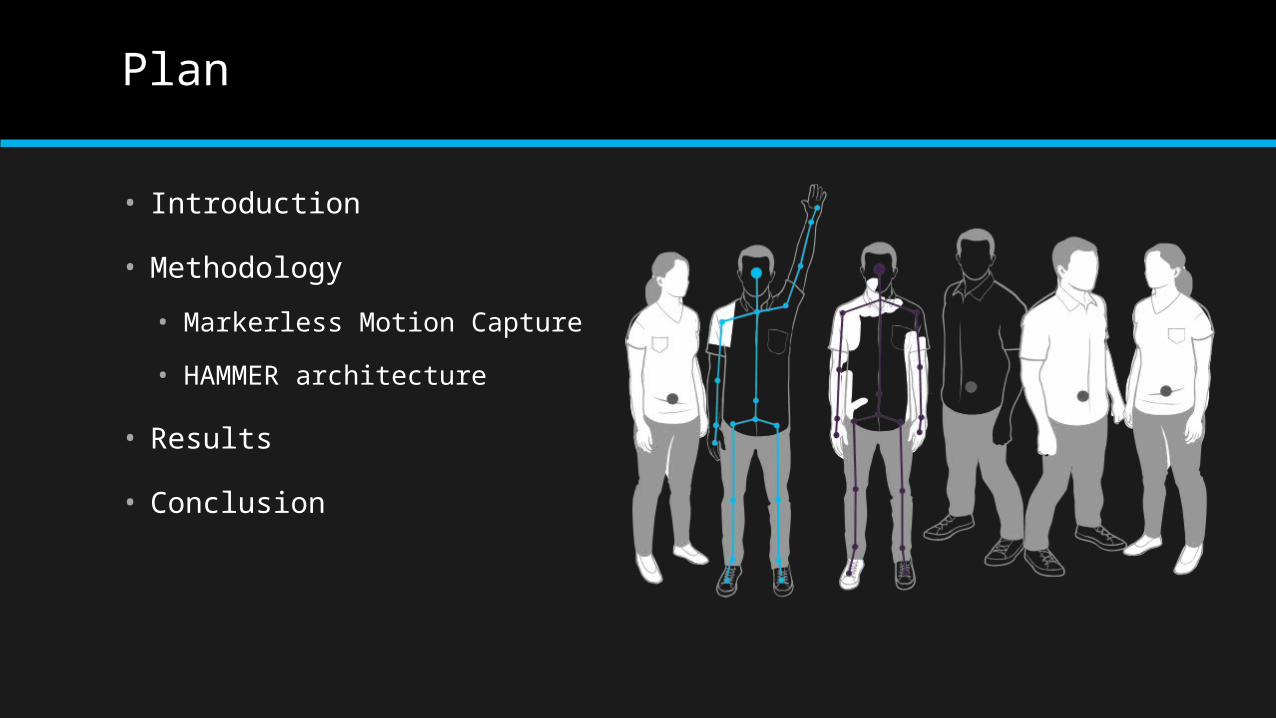
Current State of Robotics
Industrial robotics Social robotics
What will we do?
The main goals of our research:
- to develop and try a new method of human motions recognizing
- to create software for the robot which will build an appropriate model of the robot’s behavior with using the new method of human motions recognizing
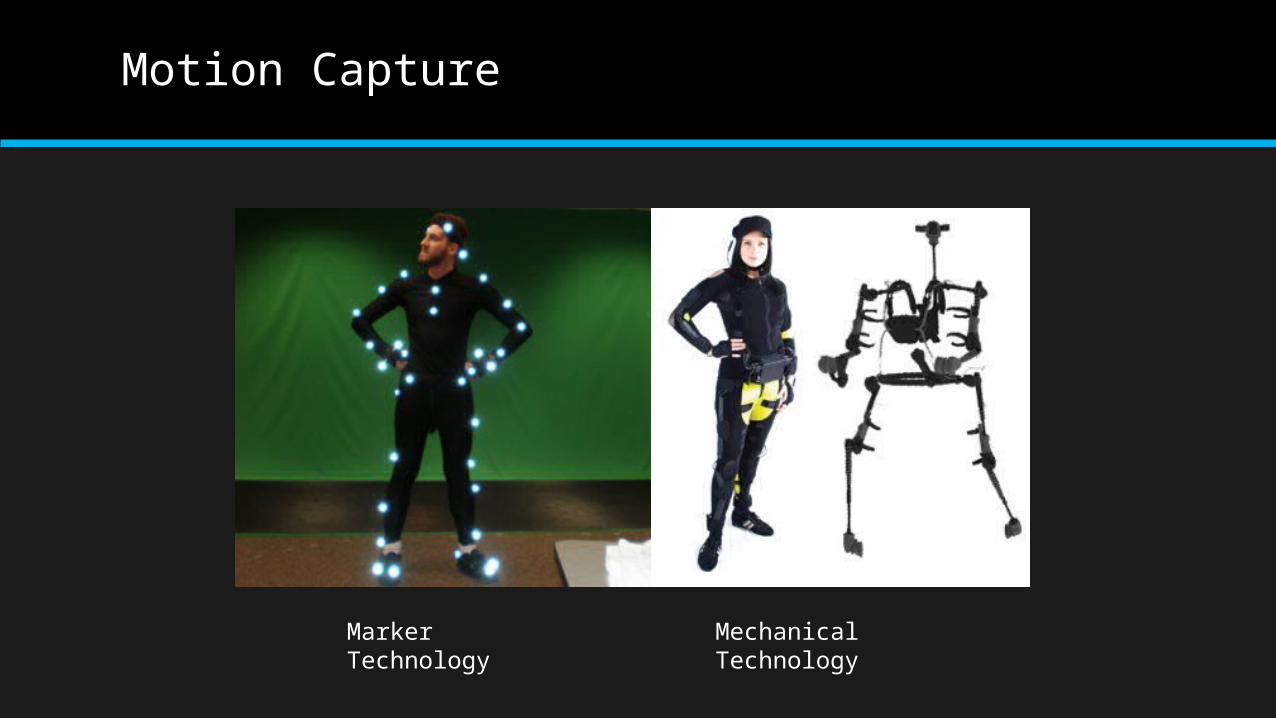
Motion Capture
Marker Technology Mechanical Technology
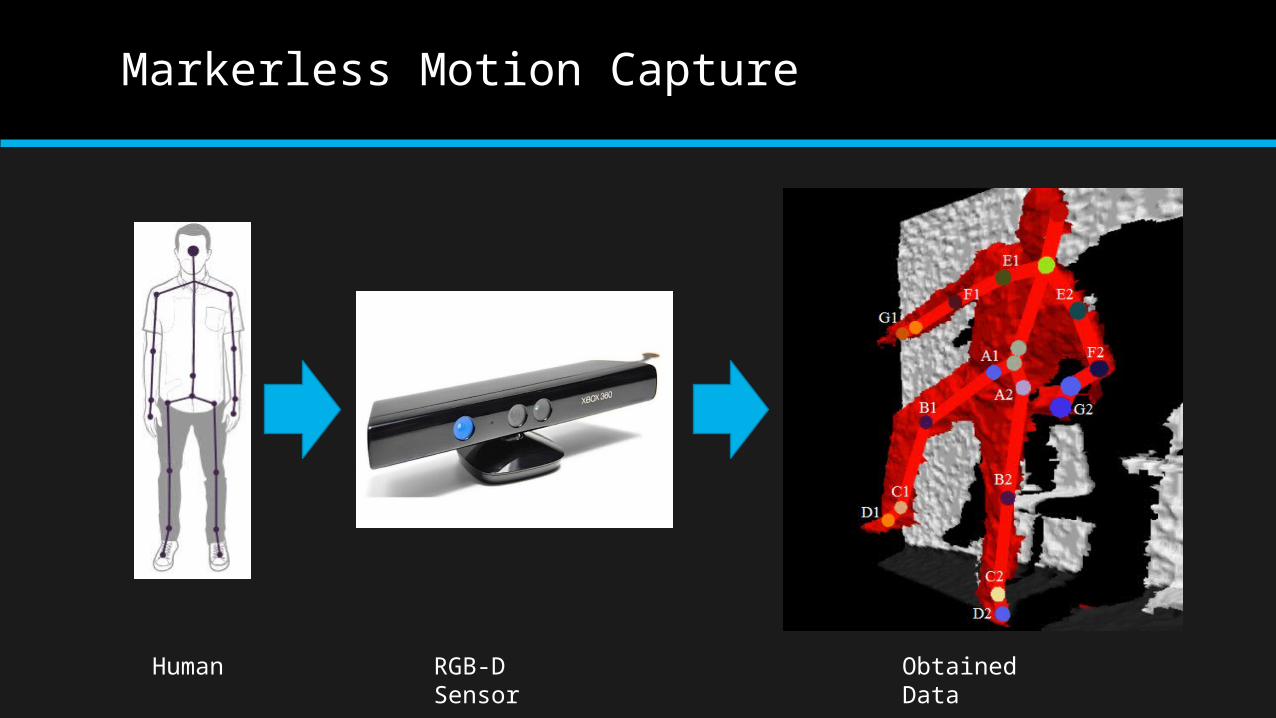
Markerless Motion Capture
RGB-D SensorHuman Obtained Data
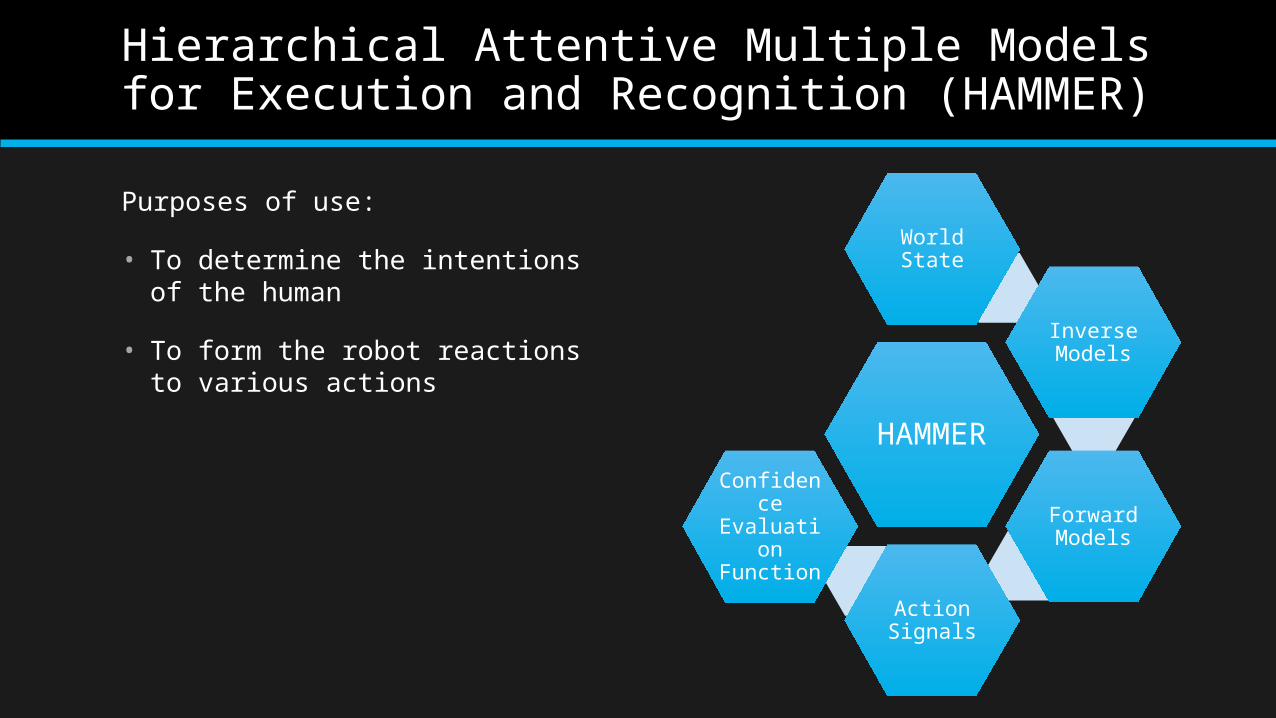
Hierarchical Attentive Multiple Models for Execution and Recognition (HAMMER)
Purposes of use:
• To determine the intentions of the human
• To form the robot reactions to various actions
HAMMER
World State
Inverse Models
Forward Models
Action Signals
Confidence Evaluation Function
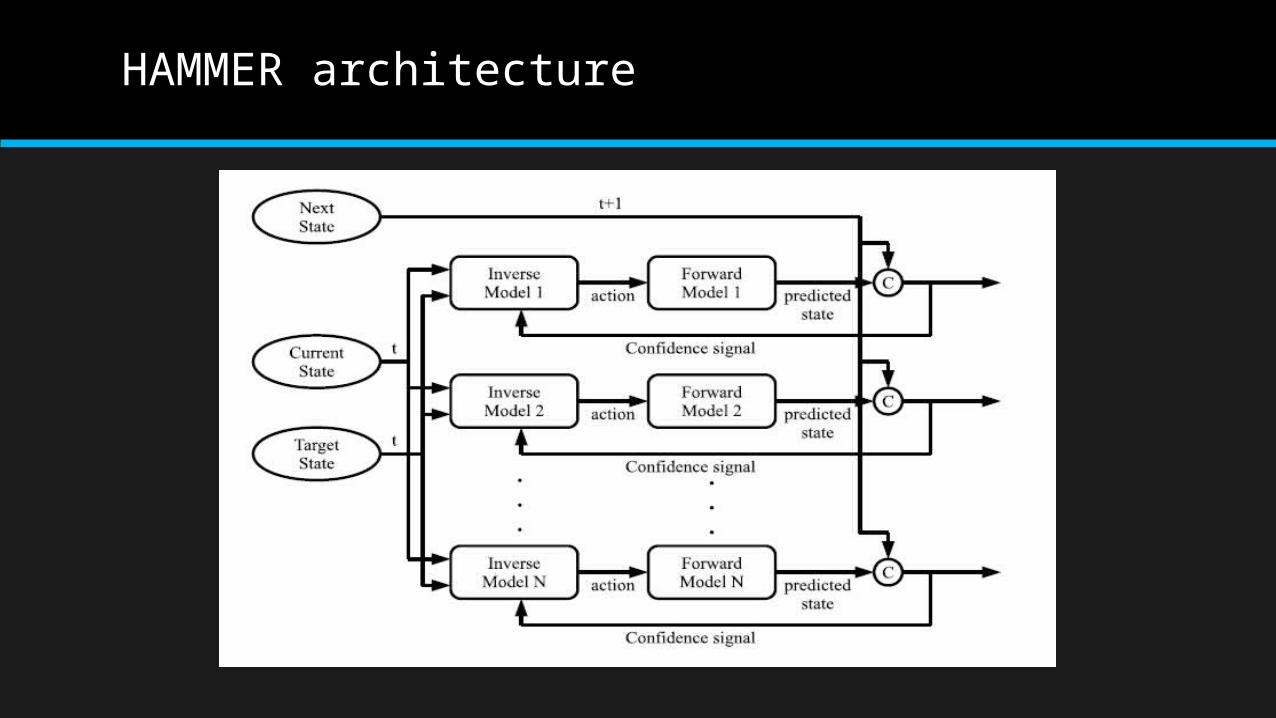
HAMMER architecture
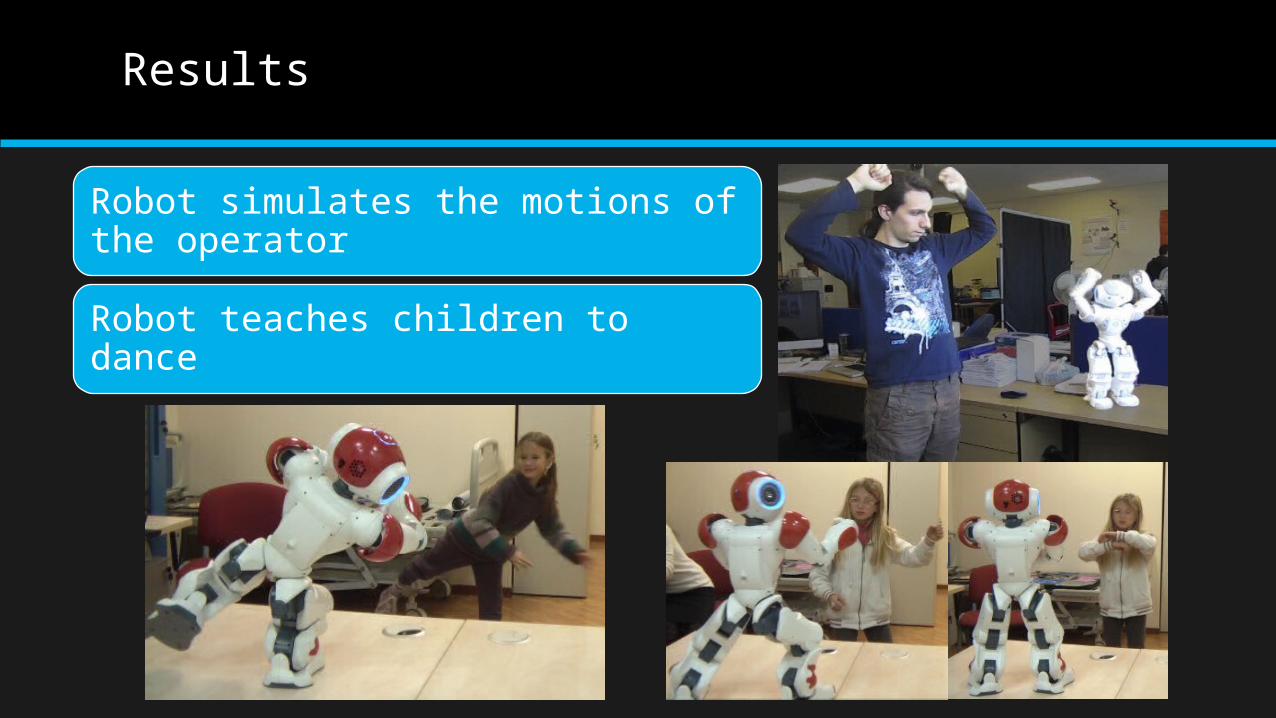
Results
Robot simulates the motions of the operator
Robot teaches children to dance
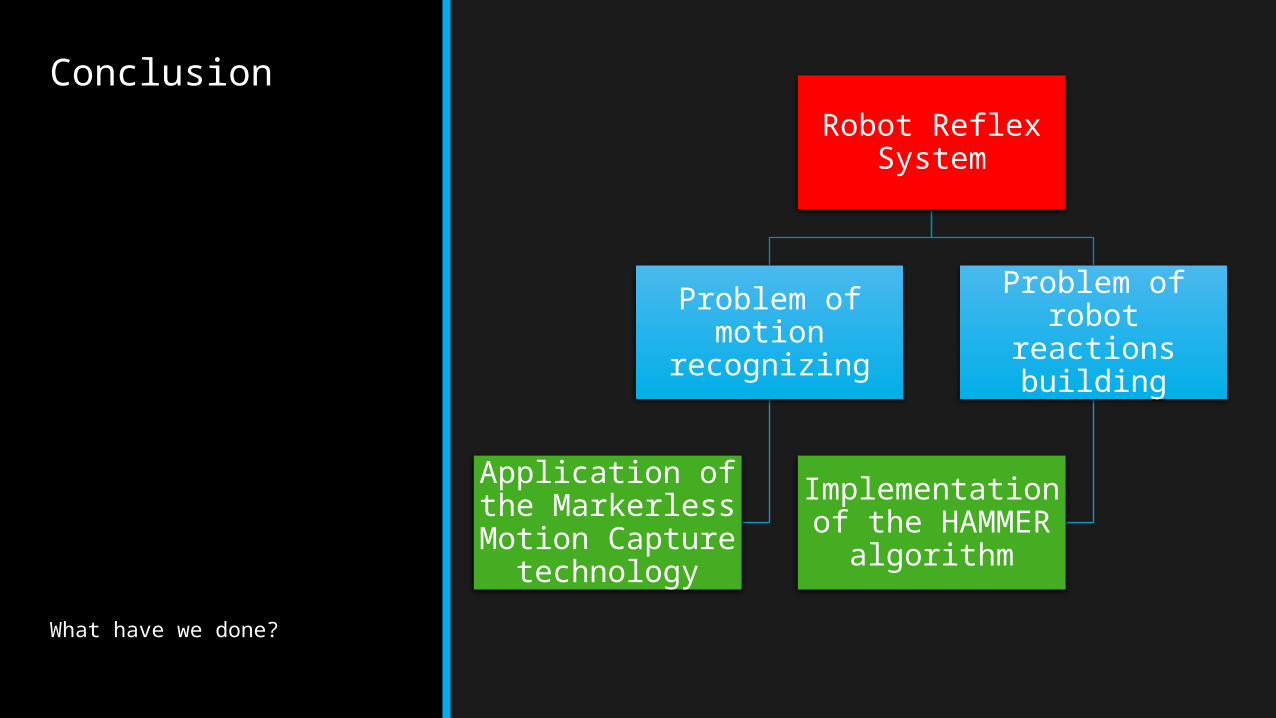
Conclusion
What have we done?
Robot Reflex System
Problem of motion recognizing
Application of the Markerless Motion
Capture technology
Problem of robot reactions building
Implementation of the HAMMER
algorithm
References
1. S. Schaal, The New Robotics-towards human-centered machines, HFSP journal, vol. 1, no. 2, pp. 115–26, 2007.2. Y. Demiris, Prediction of intent in robotics and multi-agent systems, Cognitive processing, vol. 8, no. 3, pp. 151–158,
2007.3. http://en.wikipedia.org/wiki/Motion_captue4. Arnaud Ramey, Víctor González-Pacheco, Miguel A Salichs. Integration of a Low-Cost RGB-D Sensor in a Social
Robot for Gesture Recognition. 6th international conference on Humanrobot interaction HRI 11, 20115. Miguel Sarabia, Raquel Ros, Yiannis Demiris. Towards an open-source social middleware for humanoid robots, 11th
IEEE-RAS International Conference on Humanoid Robots, 20116. Y. Demiris and B. Khadhouri, Hierarchical Attentive Multiple Models for Execution and Recognition (HAMMER),
Robotics and Autonomous Systems, vol. 54, no. 5, pp. 361–369,20067. Abstraction in Recognition to Solve the Correspondence Problem for Robot Imitation, in Proc. of the Conf. Towards
Autonomous Robotics Systems, 2004, pp. 63–70.8. M. F. Martins and Y. Demiris, Learning multirobot joint action plans from simultaneous task execution
demonstrations, in Proc. of the Intl. Conf. on Autonomous Agents and Multiagent Systems, vol. 1, 2010, pp. 931–938.
9. S. Butler and Y. Demiris, Partial Observability During Predictions of the Opponent’s Movements in an RTS Game, in Proc. of the Conf. on Computational Intelligence and Games, 2010, pp. 46–53.
10. A. Karniel, Three creatures named ‘forward model’, Neural Networks, vol. 15, no. 3, pp. 305–7, 2002.11. Y. Wu, Y. Demiris, Learning Dynamical Representations of Tools for Tool-Use Recognition, IEEE International
Conference on Robotics and Biomimetics, 2011
ROBOT BEHAVIOUR CONTROL
SUCCESSFUL TRIAL OF MARKERLESS MOTION CAPTURE TECHNOLOGY
Student E.E. Shelomentsev Group 8Е00Scientific supervisor Т.V. AlexandrovaLanguage supervisor T.I.Butakova
Mission Completed! Next research can be found here: