Embed Size (px)
Citation preview

■ RoboCup-2001 was the Fifth InternationalRoboCup Competition and Conference. It washeld for the first time in the United States, follow-ing RoboCup-2000 in Melbourne, Australia;RoboCup-99 in Stockholm; RoboCup-98 in Paris;and RoboCup-97 in Osaka. This article discusses indetail each one of the events at RoboCup-2001,focusing on the competition leagues.
RoboCup-2001 was the Fifth InternationalRoboCup Competition and Conference(figure 1). It was held for the first time in
the United States, following RoboCup-2000 inMelbourne, Australia; RoboCup-99 in Stock-holm; RoboCup-98 in Paris; and RoboCup-97in Osaka. RoboCup is a research-oriented initia-tive that pioneered the field of multirobotresearch of robot teams starting in 1996. Inthose days, most of the robotics research wasfocused on single-robot issues. RoboCupopened a new horizon for multirobot research:Teams of robots need to face other teams ofrobots to accomplish specific goals. This chal-lenging objective offers a broad and rich set ofresearch and development questions, to wit theconstruction of mechanically sound and robustrobots, real-time effective perception algo-rithms, and dynamic behavior-based approach-es to support teamwork.
RoboCup has truly been a research-orientedendeavor. Every year, the RoboCup researchersanalyze the progress of the research andextend the competitions and demonstrationsin the different leagues to create new chal-lenges. The ultimate goal of RoboCup is toreach a point where teams of robots can suc-cessfully compete with human players. TheRoboCup events move toward this goal.
This article discusses in detail each one ofthe events at RoboCup-2001, focusing on thecompetition leagues. As an overview of thecomplete RoboCup-2001 (table 1 lists all theteams), and as an introduction to this article,we first provide a short description of theRoboCup-2001 events. The general chair ofRoboCup-2001 was Manuela Veloso. The asso-ciate chairs in charge of robotic and simulationevents, respectively, were Tucker Balch andPeter Stone.
International symposium: This was a two-day international symposium with presenta-tions of technical papers addressing AI androbotics research of relevance to RoboCup.Twenty papers and 42 posters were successfullypresented in perception and multiagent behav-iors. The proceedings will be published bySpringer and are edited by program chairsAndreas Birk, Silvia Coradeschi, and SatoshiTadokoro.
Articles
SPRING 2002 55
RoboCup-2001
The Fifth Robotic Soccer World Championships
Manuela Veloso, Tucker Balch, Peter Stone, Hiroaki Kitano, Fuminori Yamasaki, Ken Endo, Minoru Asada, M. Jamzad,
B. S. Sadjad, V. S. Mirrokni, M. Kazemi, H. Chitsaz, A. Heydarnoori, M. T. Hajiaghai, and E. Chiniforooshan
Copyright © 2002, American Association for Artificial Intelligence. All rights reserved. 0738-4602-2002 / $2.00
centimeters2 in which robots needed to havefull on-board autonomy (table 4). The Sonylegged-robot league consisted of teams of threefully autonomous Sony robots. Sixteen teamsparticipated with Sony four-legged robots. Therobot rescue competition was jointly held byRoboCup and the American Association forArtificial Intelligence (AAAI). It was held forthe first time as part of RoboCup, and it con-sisted of a three-story disaster scenario provid-ed by the National Institute of Standards andTechnology (NIST), where robots navigatethrough debris to search for victims.
Humanoid robot demonstration: Robo-Cup-2001, jointly with AAAI, held a demon-stration of a humanoid robot. We are planningthe first humanoid game for RoboCup-2002.RoboCup-2001 proved to be a truly significantcontribution to the fields of AI and roboticsand the subareas of multiagent and multirobotsystems.
Robotics LeaguesRobots competed in four leagues at RoboCup-2001: (1) the small-size league, (2) the middle-size league, (3) the Sony legged-robot league,and (4) robot rescue. The small-size league,chaired by Raul Rojas, involves teams of fiverobots that play on a field about the size of atable tennis court with an orange golf ball. The
Two simulation leagues: These are the soc-cer simulator and the simulation rescue. Thesoccer simulator competition consisted ofteams of 11 fully distributed software agents.The framework consists of a server that simu-lates the game and changes the world accord-ing to the actions that the players want to exe-cute. The RoboCup Simulation Rescuecompetition, with teams of fully distributedsoftware agents, provided a disaster scenario inwhich teams with different capabilities, forexample, firefighters, police crews, and medicalteams, needed to conduct search and rescue forvictims of a disaster. This event was held forthe first time at RoboCup-2001.
RoboCup junior outreach: The RoboCupjunior event hosts children 8 to 18 years of ageinterested in robotic soccer. The competitionsand demonstrations include two on two soccerand robot dancing.
Four robot leagues: These leagues are thesmall-size robot, the middle-size robot, theSony legged robot, and the robot rescue. Thesmall-size robot competition consisted ofteams of as many as five robotic agents ofrestricted dimensions, approximately 15 cen-timeters.3 Off-board vision and computerremote control were allowed. The middle-sizerobot competition consisted of teams of asmany as four robotic agents of restricteddimensions and a surface of approximately 50
Articles
56 AI MAGAZINE
Figure 1. The RoboCup-2001 Participating People and Robots.
Articles
SPRING 2002 57
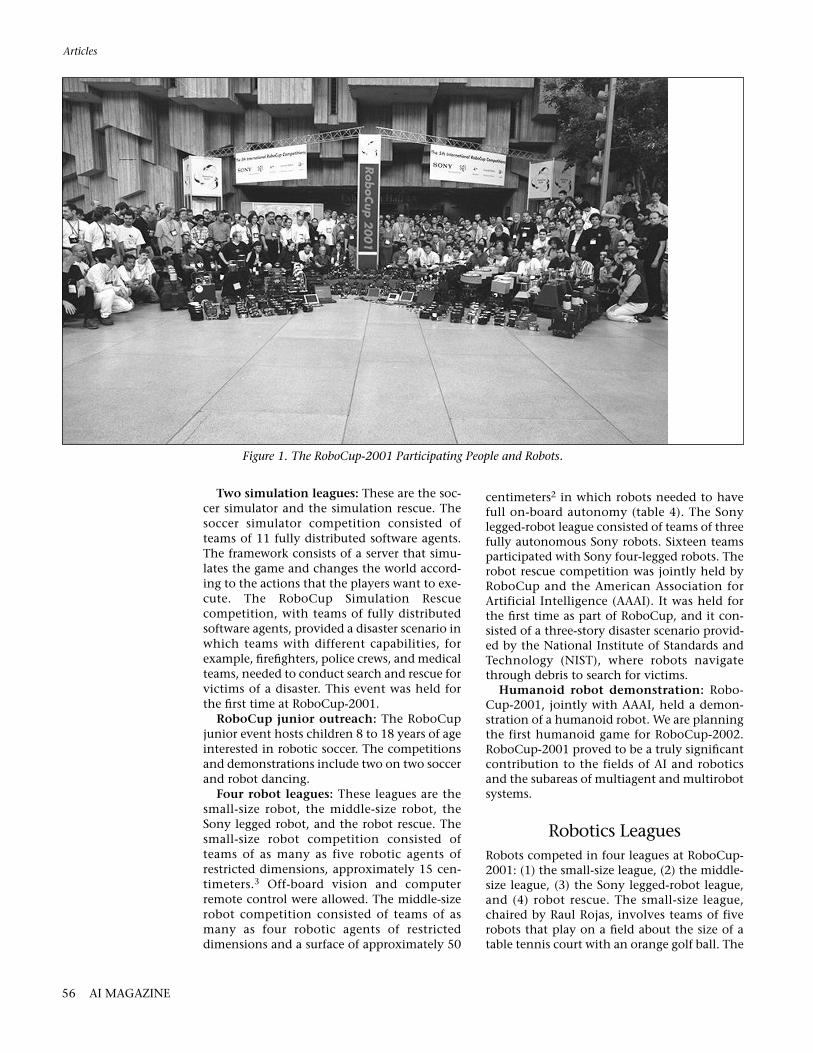
Figure 2. Two Views of the RoboCup-2001 Middle-Size League.

must be on board the robots themselves. Teamsare composed of as many as four robots. Anorange FIFA (International Soccer Association)size-5 ball is used.
Eighteen teams participated in the middle-size league at RoboCup-2001, which waschaired by Pedro Lima. Three groups of sixteams each competed in round-robin matches,with the best eight teams proceeding to playoffgames. The top three finishers in the middle-size league were (1) CS FREIBURG, (2) TRACKIES, and(3) EIGEN.
The Sony legged robots compete on a 3-meter by 5-meter carpeted field. Six coloredlandmarks are placed around the field to helpthe robots determine their location. A smallplastic orange ball is used for scoring. Like themiddle-size league, the Sony legged robots arelimited to on-board sensing (including a colorcamera). All teams must use identical robotsprovided by Sony. In 2001, teams were com-posed of three robots each; in 2002, the teamswill include four robots. The Sony legged-robotsoccer league has been expanding each year toinclude new teams. RoboCup-2001 included16 teams from around the world.
The Sony legged league was chaired byMasahiro Fujita. As in the other robot leagues,the competition was conducted in round-robinand playoff stages. For the round robin, teamswere organized into four groups of four teams.Eight teams progressed to the playoffs. The topthree finishers in the Sony legged-robot leaguewere (1) UNSW UNITED’01, (2) CM-PACK’01, and (3)UPENNALIZERS’01.
The year 2001 marked the first yearRoboCup included a robot rescue event (figure3). The event was jointly organized byRoboCup and AAAI and chaired by Holly Yan-co. In this competition, robots explored a sim-ulated postearthquake environment fortrapped or injured human victims. Seventeams participated in this event. No team didwell enough to place, but two technical awardswere given. Swarthmore College was given theTechnical Award for Artificial Intelligence forRescue, and Sharif University received theTechnical Award for Advanced Mobility forRescue. We expect this league to grow substan-tially in the next few years. The robot rescuecompetition is described in more detail in thecompanion articles in this issue.
Simulation LeaguesRoboCup-2001 featured the fifth RoboCup soc-cer simulation competition and introduced thefirst RoboCup rescue simulation competition.Both simulation platforms aim to capture
robots are limited in size to at most 18 cen-timeters in diameter. One of the key distinc-tions between the small-size league and theother leagues is that teams in the small-sizeleague are allowed to place cameras over thefield to determine the locations of robotic play-ers and the ball. In most cases, teams feed theoutput of the overhead camera into a centralcomputer that determines movement com-mands that are transmitted over wireless linksto the robots. However, many researchers areinterested in the challenge of developingsmall-size robots with onboard sensing only;the number of teams in this category has beengrowing each year.
The small-size field has evolved substantiallyin the last few years. Originally, the field wasdefined as a ping-pong table surrounded by 10-centimeter-tall vertical walls. However, it wasfelt that more “finesse” would be achieved inball handling if the walls were angled; so, in2000 the walls were set at a 45-degree angle andshortened to 5 centimeters, where the ball islikely to roll out of bounds if it is not handledcarefully. Another evolution toward more real-istic play was the addition of “artificial turf” onthe field (actually a short green carpet).
The year 2001 marked the first time thatmore teams wanted to attend than could beaccommodated at the competition. Space andtime limited the organizers to approximately20 teams in each league. Teams were requiredto submit technical descriptions and video-tapes of their teams to qualify. In the case ofthe small-size league, 22 teams were invited,and 20 eventually made the trip to Seattle.
The competition was conducted as follows:Teams were divided into four groups of fiveteams each. The composition of the groupsdepended on a number of factors, includingpast performance and country-continent oforigin. Within each group, a full round-robincompetition was held (each team played everyother team in the group). At the end of theround-robin phase, the top two teams in eachgroup were allowed to proceed to the playoffs.The small-size teams that reached the playoffswere FU-FIGHTERS, LUCKY STAR II, KU-BOXES, ROGI
TEAM, CORNELL BIG RED, 5DPO, ROBOROOS, and theFIELD RANGERS. Quarter finals, semifinals, andfinals were held in a single elimination tourna-ment, with an additional match to determinethird place. The top finishers were (1) LUCKY
STAR II, (2) FIELD RANGERS, and (3) CORNELL BIG RED.Middle-size–league teams play on carpeted
fields 5 meters wide by 9 meters long (figure 2).The robots are limited to 50 centimeters indiameter. Unlike the small-size league, noexternal sensing is allowed, and all sensors
Articles
58 AI MAGAZINE

many of the challenges of the robotic leagues,without requiring participants to build physi-cal robots. Like in the real world, simulatoragents must deal with large amounts of uncer-tainty and both perceptual and actuator noise.Although the challenges of computer visionand mechanical design are abstracted away,simulator teams consist of greater numbers ofagents than do their robotic counterparts and,thus, must address more large-scale multiagentissues. The ability to execute many more testruns in simulation than is possible with realrobots also enables a larger range of possibleapproaches to agent control, including learn-ing-based methods.
Soccer SimulationThe soccer simulator competition, chairedthis year by Gal Kaminka, continues to be themost popular RoboCup event from the per-spective of the number of entrants (figure 4).More than 50 teams met the qualificationrequirements, 42 of which actually enteredthe competition. The RoboCup soccer simula-
tor (Noda et al. 1998) is an evolving researchplatform that has been used as the basis forsuccessful international competitions andresearch challenges (Kitano et al. 1997). It is afully distributed, multiagent domain withboth teammates and adversaries. There is hid-den state, meaning that each agent has only apartial world view at any given moment. Theagents also have noisy sensors and actuators,meaning that they do not perceive the worldexactly as it is, nor can they affect the worldexactly as intended. In addition, the percep-tion and action cycles are asynchronous, pro-hibiting the traditional AI paradigm of usingperceptual input to trigger actions. Communi-cation opportunities are limited, and theagents must make their decisions in real time.These domain characteristics combine tomake simulated robotic soccer a realistic andchallenging domain. Each year, small changesare made to the simulator both to introducenew research challenges and to “level theplaying field” for new teams. This year, thebiggest changes were the introduction of het-
Articles
SPRING 2002 59
Figure 3. The RoboCup Rescue Robot League.

lator for the first time this year in version 7.0 ofthe simulator.1 In previous versions, teamscould consist of players with different behav-iors, but their physical parameters, such as size,
erogeneous players and the introduction of astandardized coach language.
Heterogeneous Players Heterogeneousplayers were introduced to the RoboCup simu-
Articles
60 AI MAGAZINE
The RoboCup humanoid league, which isscheduled to start in 2002, is one of themost attractive research targets. We believethat the success of the humanoid league iscritical for the future of RoboCup and willhave major implications in roboticsresearch and industry. Building humanoidrobots that compete at RoboCup requiressophistication in various aspects, includingmechanical design, control, and high-levelcognition.
PINO is a low-cost humanoid platformcomposed of low-torque servomotors andlow-precision mechanical structures. It hasbeen developed as a humanoid platformthat can widely be used by many RoboCupresearchers in the world. Figure A showsthe whole view and the mechanical archi-tecture of PINO.
It is intentionally designed to have low-torque motors and low-precision mechani-cal structures because such motors andmechanical structures significantly reduceproduction cost. Although many huma-noid robots use high-performance motorsystems to attain stable walking, suchmotor systems tend to be expensive.Motors that are affordable for manyresearchers have only limited torque andaccuracy. Development of a method thatallows biped walking using low-cost com-ponents would have a major impact on theresearch community as well as industry. Inthe past, many researchers have studied asimple planar walker without any controltorque (McGeer 1990). In such methods,
walking motions are decided by the rela-tionship between a gravity potential effectand structural parameters of the robots.Thus, there is no control over walkingbehaviors such as speed and dynamicchange in step size.
In the biped walking method, we startedwith the hypothesis that the walker canchange the walking speed without chang-ing the step length if the moment of inertiaof the swing leg at the hip joint has ade-quately been changed. We designed a con-trol method using the moment of inertia ofthe swing leg at the hip joint. The methodwas applied to the torso of the PINO modelin computational simulations and con-firmed that the method enables stablewalking with limited torque.
A cycle of biped walking can be subdi-vided into several phases: (1) two-leg sup-porting, (2) one-leg supporting, and (3)landing. Both legs are grounded in the two-leg supporting phase and landing phase,whereas only one leg is grounded in theone-leg supporting phase. In conventionalbiped walking algorithms, knees are alwaysbent so that motors are continuously high-ly loaded. This approach is very differentfrom normal human walking postures. Itshould be noted that most of the currentcontrol methods for humanoid walking aredesigned independently of the structuralproperties of the robot hardware. In gener-al, these control methods require extreme-ly large torque to realize desired walkingpatterns. Although knees are bent whenwalking on uneven terrain or majorweights are loaded, the legs are stretchedstraight when walking on a flat floor. Thisposture can easily be modeled by invertedpendulum, which is known to be energyefficient. In addition, movement of the tor-so affects the overall moment of inertiaand, thus, affects energy efficiency. Ourgoal is to mimic human walking posture tominimize energy through a combination ofan inverted pendulum controlled by aswing leg and feedback control of torsomovement.
The basic idea behind the low-energywalking method is to consider legs ofhumanoid robots, during the one-leg sup-porting phase, as a combination of aninverted pendulum model and a two–degree-of-freedom (DOF) pendulum mod-el, assuming the structure of PINO to be a
planar walker. In this case, the invertedpendulum represents the supporting leg,and the two DOF pendulum represents theswing leg. The inverted pendulum model isthe most energy-efficient model of the sup-porting leg.
Figure B shows the four-link model withtorso. This model consists of link1, link2,link3, and link4; link1 has a joint with theground. We define every joint angle θ1, θ2,θ3, θ4 as an absolute angle of link1, link2,link3, and link4, respectively. We assumethat every joint has a viscosity coefficientof 0.01 [N ⋅ m ⋅ s/ rad] and that the kneejoint also has a knee stopper. Each link hasuniformly distributed mass m1, m2, m3, andm4, respectively. Table A shows the linkparameters of the four-link model that areobtained from the real PINO.
Given the control method to verifythese hypotheses (Yamasaki et al. 2001),parameter spaces were searched to identifyan optimal parameter set. Optimal solu-tions were found for three cases: (1) torsomovement is controlled by feedback frombody and leg movement, (2) torso is fixedvertically, and (3) the three-link modelwithout torso is compared with the four-link model with torso.
RoboCup-2001 Scientific Challenge Award
Energy-Efficient Walking for a Low-Cost Humanoid Robot, PINO
Figure A. PINO.
Left: Whole view. Right: Mechanism.
Link1
Link2
Link3l1
l2
l3
Link3
Link2
Link4
l4
Link4
θ3
˘2
θ1
leg bodyθ4
Figure B. Planar Four-Link Model of the Robot.
m1 [kg] 0.718 l1 [m] 0.2785m2 [kg] 0.274 l2 [m] 0.1060m3 [kg] 0.444 l3 [m] 0.1725m4 [kg] 3.100 l4 [m] 0.4515
Table A. Link Parameters.

speed, and stamina, were all identical. Thisyear, teams could choose from among playerswith different physical characteristics. In par-ticular, in any given game, each team was ableto select from identical pools of players, includ-ing the default player type from years past and
six randomly generated players. At start-up,teams were configured with all default players.However, the autonomous online coach couldsubstitute in the randomly generated playersfor any player other than the goalie. The onlyrestriction is that each random player type
Articles
SPRING 2002 61
Figures C, D, and E show the foot trajec-tory for each case. Table B shows the initialangular velocity θ
.1, θ
.2, θ
.3, θ
.4 time to touch
down t2 and energy consumption. Fromtable B, t2 of the four-link model with torsois longer than that of the three-link modelwithout torso t2, and energy consumptionof case 1 is smaller than that of case 2,although every angular speed is larger.From these results, we can verify that thewalking motion with appropriate swings ofthe torso enables the robot to walk withlower energy consumption.
We chose the moment of inertia of theswing leg at the hip joint, and we appliedfeedback torque τleg = –klegϕ to the hip joint.As a result, in the lower-limb model of PINO,the maximum torque required was reducedto the range of approximately 0.2 [N ⋅ m](at k = 0.13) to 0.35 [N ⋅ m] (at k = 0.22).This enables the low-cost humanoid PINO toperform reasonably stable biped walking.
Further, in the four-link model with tor-so, it was verified that appropriate swingsof the torso enable the robot to walk withlower energy consumption, as low as 0.064[J].
In this study, we observed the interest-ing relationship between the control para-meters and the walking behaviors, butunderstanding the details of the mecha-nism that realize such behaviors is ourfuture work. This study demonstrates thatthe energy efficiency of humanoid walking
can be altered when whole body motion isappropriately used. This is an importantinsight toward achieving practical human-oid robots for low-cost production as wellas high-end humanoid seeking forultra–high performance using whole-bodymovement.
OPENPINOAll technical information on PINO is nowavailable under GNU General PublicLicense and GNU Free Document Licenseas OPENPINO (exterior design and trade-marks are not subjects of GNU license). It isintended to be an entry-level research plat-form for possible collective efforts to fur-ther develop humanoid robots for addi-tional research. Authors expect the LINUX-like community is building around OPEN-PINO.
Acknowledgments
The dynamic simulation was supported byMasaki Ogino. The authors thank him andmembers of the Asada Laboratory at OsakaUniversity.
— Fuminori YamasakiKen EndoMinoru AsadaHioraki Kitano
Left: Figure C. Result of the Foot Gait of Case 1. Middle: Figure D. Result of the Foot Gait of Case 2.Right: Figure E. Result of the Foot Gait of Case 3.
Value Case 1 Case 2 Case 3θ.1 [rad/sec] 1.736 0.962 3.374
θ.2 [rad/sec] 1.692 0.223 1.384
θ.3 [rad/sec] 0.000 0.000 0.000
θ.4 [rad/sec] 1.309 — —
t2 [sec] 0.319 0.406 0.296Energy consumption [J] 0.064 0.109 0.025
Table B. Results of Three Cases.

players, with some observers commenting ontheir speedy players that they positioned onthe sides of the field.
Standardized Coach Language PastRoboCup simulator competitions have allowedteams to use an omniscient autonomous coachagent. This coach is able to see the entire fieldand communicate with players only when theplay is stopped (for example, after a goal or fora free kick). Typically, each team developed itsown communication protocol between theplayers and the coach.
This year, a standardized coach language wasintroduced with the goal of allowing a coachfrom one team to interact with the playersfrom another. The standardized language has aspecific syntax and intended semantics. Teamshad an incentive to use this language becausemessages encoded in the standardized lan-guage could be communicated even when theball was in play (although with some delay andfrequency limit to prevent coaches from“micromanaging” their players).
One offshoot of introducing a standardized
could be assigned to, at most, three teammates.The random players are generated by the
simulator at start-up time by adjusting fiveparameters, each representing a trade-off inplayer abilities: (1) maximum speed versus sta-mina recovery, (2) speed verus turning ability,(3) acceleration versus size, (4) leg length ver-sus kick accuracy, and (5) stamina versus max-imum acceleration. These parameterizationswere chosen with the goal of creating interest-ing research issues regarding heterogeneousteams without creating a large disadvantage forteams that chose to use only default players. Atthe outset, it was not known whether usingheterogeneous players would be advantageous.Experimentation leading to the competitionestablished that using heterogeneous playerscould provide an advantage of at least 1.4 goalsa game over using only the default players(Stone 2002).
Indeed, at least one of the top-performingteams in the competition (UvA Trilearn fromthe University of Amsterdam—fourth place)took good advantage of the heterogeneous
Articles
62 AI MAGAZINE
Figure 4. The RoboCup-2001 Simulation Leagues.
language was that an auxiliary competitioncould be introduced: a coach competition. Inthis competition, entrants provided only acoach that was paired with a previouslyunknown team that is able to understand thestandardized coach language. Entrants werejudged based on how well this unknown teamcould perform against a common opponentwhen coached by the entrant’s coach program.
Results For the second year in a row, a first-time entrant won the RoboCup simulator com-petition: tsinghuaeolus from Tsinghua Univer-sity in China. They beat the brainstormersfrom Karlsruhe University in Germany by ascore of 1–0, scoring the lone goal of the gameduring the third overtime period. The winnersof the inaugural coach competition were theChaMeleons from Carnegie Mellon Universityand Sharif-Arvand from Sharif University ofTechnology in Iran.
Rescue SimulationRoboCup-2001 hosted the inaugural RoboCup
rescue simulation competition, which waschaired by Satoshi Tadokoro. The basis ofRoboCup rescue is a disaster rescue scenario inwhich different types of rescue agents—fire-fighters, police workers, and ambulance work-ers—attempt to minimize the damage done tocivilians and buildings after an earthquake.The setting was a portion of Kobe, Japan, thesite of a recent devastating earthquake.
The simulator included models that causebuildings to collapse, streets to be blocked, firesto spread, and traffic conditions to be affectedbased on seismic intensity maps. Each partici-pant had to create rescue agents for each of thethree types as well as one control center for eachtype of agent (that is, a fire station, a police sta-tion, and a rescue center). The agents sense theworld imperfectly and must react to dynamical-ly changing conditions by moving around theworld, rescuing agents, and putting out firesaccording to their unique capabilities. Commu-nication among agents of different types isrestricted to going through the control centers.
Articles
SPRING 2002 63
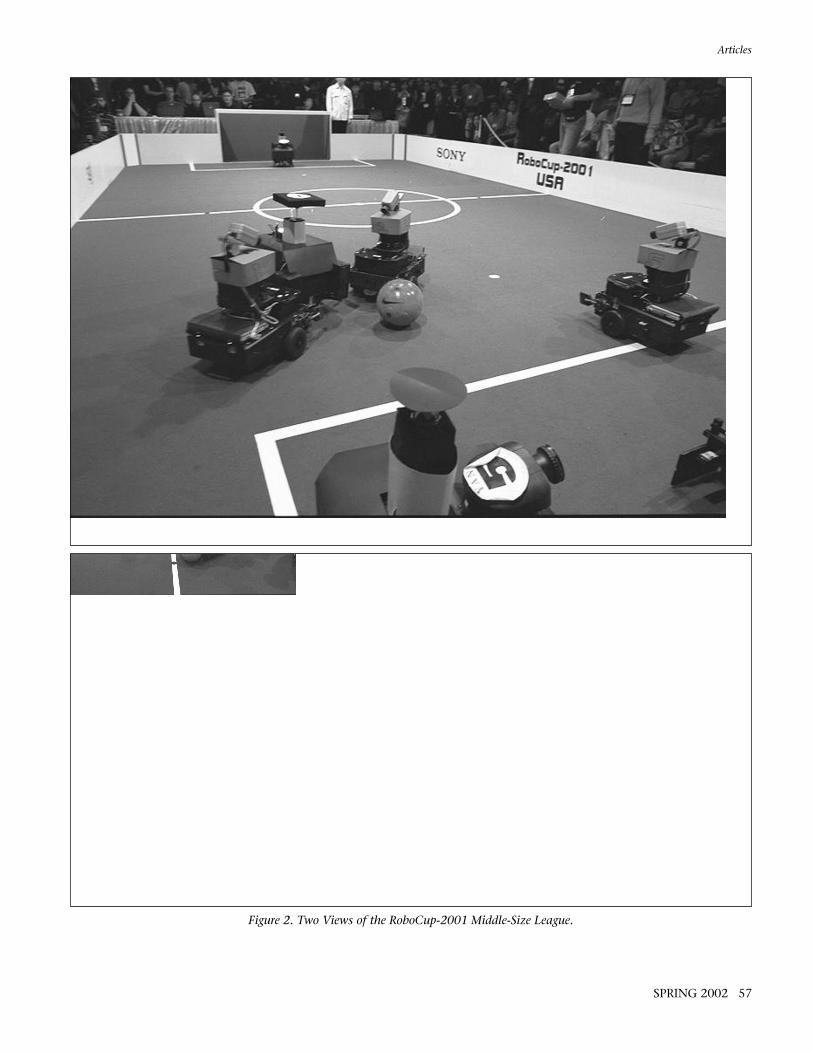
Figure 5. A RoboCup Junior Game.

Fast and reliable analysis of image data isone of the key points in soccer robot per-formance. To make a soccer robot act fastenough in a dynamically changing envi-ronment, we will reduce the number ofsensors as much as possible and design fastsoftware for object detection and reliabledecision making. Therefore, in RoboCup,we think it is worth getting fast and almostcorrect results rather than slow and exact.To achieve this goal, we propose threeideas: (1) a new color model, (2) objectdetection by checking image color on a setof jump points in the perspective view ofthe robot front camera, and (3) a fastmethod for detecting edge points onstraight lines. The other details of our robot(that is, its mechanical design, hardwarecontrol, and software) is given in Jamzad etal. (2000).
A New Color ModelWe propose a new color model named HSY(the H is from CIELab, S from HSI, and Yfrom Y IQ color models [Sangwine andHorne 1998]). The reason for this selectionis that the component Y in Y IQ converts acolor image into a monochrome one.Therefore, comparing with I in HSI, whichis the average of R, G, and B, Y gives a bet-ter mean for measuring the pixel intensity.The component S in HSI is a good measurefor color saturation. Finally, the parameterH in CIELab is defined as follows:
H = tan–1b*/a*where a* denotes relative redness-green-ness, and b* shows yellowness-blueness(Sangwine and Horne 1998). H is a goodmeasure for detecting regions matching agiven color (Gong and Sakauchi 1995),which is exactly the case in RoboCupwhere we have large regions with a singlecolor.
Object Detection in Perspective View
In the real world, we see everything in per-spective: Objects far away from us are seensmall, and those closer up are seen larger.This view is true for cameras as well. Figure
1 shows an image of the RoboCup middle-size soccer field with certain points on it.The points that are displayed in perspectiveto the robot’s front camera are called jumppoints. They have equal spacing on eachperspective horizontal line. Their verticalspacing is related to the RoboCup soccerfield size. The actual spacing between jumppoints is set in such a way that at least fivejump points are located on a bounding boxsurrounding the ball (which is the smallestobject on the soccer field), no matter howfar or how close the ball is. By checking theimage color only at these jump points,there is a high probability that we couldfind the ball. In our system, we obtainedsatisfactory results with 1200 jump points.
To search for the ball, we scan the jumppoints from the lower right point towardthe upper left corner. At each jump point,the HSY equivalent of the RGB values isobtained from a lookup table. Because wehave defined a range of HSY for each of thestandard colors in RoboCup, we can easilyassign a color code to this HSY value. If ajump point is red, then it is located on theball. Because this jump point can be anypoint on the ball, from this jump point, wecan move toward right, left, up, and down,checking each pixel for its color. As long asthe color of the pixel being checked is red,we are within the ball area. This searchstops in each direction when we reach aborder point that is a nonred pixel. In onescan of all jump points in a frame, in addi-tion to a red ball, we can find all other
objects, such as robots, the yellow goal,and the blue goal. For each object, wereturn its descriptive data, such as color,size, and the coordinate of its lower-leftand upper-right corner of its surroundingrectangle and a point Q on the middle of itslower side (figure 2). Point Q is used to findthe distance and angle of the robot fromthis object.
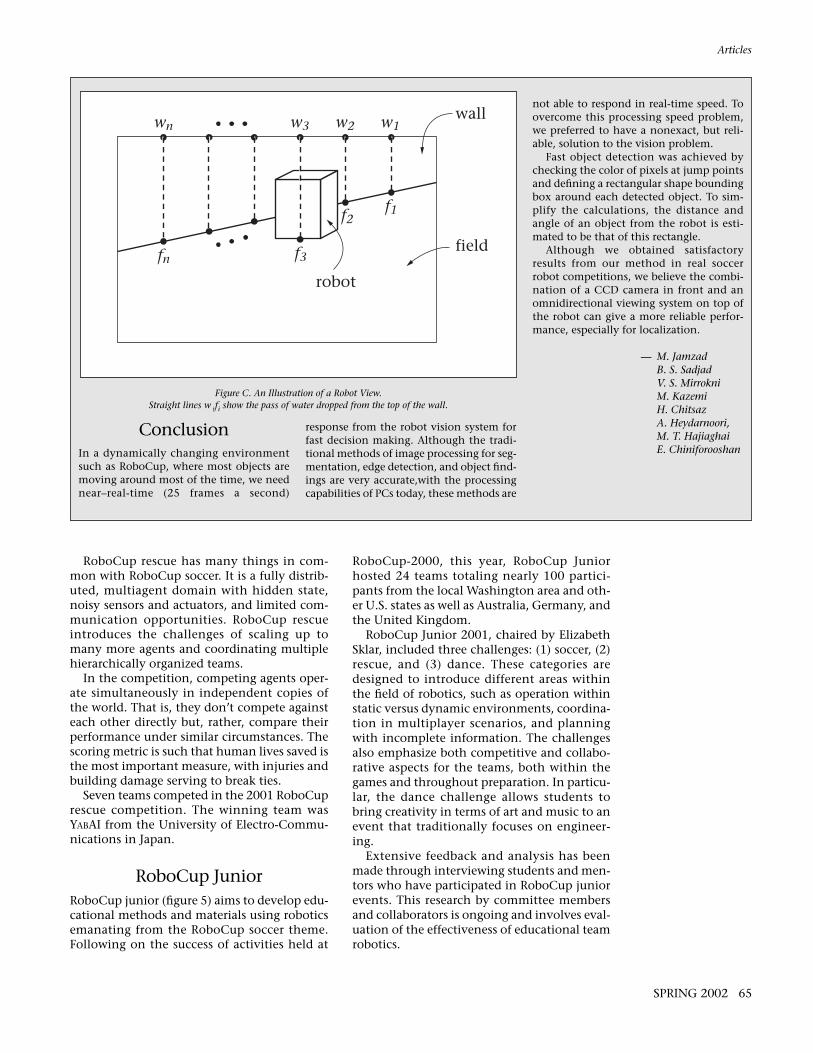
Straight-Line DetectionDuring the match, there are many caseswhen the robot needs to find its distancefrom walls. In addition, the goal keeper atall times needs to know its distance fromwalls and also from white straight lines infront of the goal. Because the traditionaledge-detection methods (Gonzalez andWoods 1993) are very time consuming inreal-time situation, we propose a very sim-ple and fast method to find the edge pointson straight lines as follows:
As seen in figure 3, to locate points onthe border of the wall and the field, weselect a few points on top of the image(these points are on the wall) and assume adrop of water is released at each point. If noobject is on its way, the water will drop onthe field, right on the border with the wall.To implement this idea, from a start pointwi we move downward until reaching agreen point fi. All candidate border edgepoints are passed to Haugh transform (Gon-zalez and Woods 1993) to find the straight-line equation that best fits these points.
Articles
64 AI MAGAZINE
RoboCup-2001 Engineering Challenge Award
Fast Object Detection in Middle-Size RoboCup
Left: Figure A. Position of Jump Points in a Perspective View of the Robot.
Right: Figure B. An Illustration of Ball Segmentation by a Surrounding Rectangle.
RoboCup rescue has many things in com-mon with RoboCup soccer. It is a fully distrib-uted, multiagent domain with hidden state,noisy sensors and actuators, and limited com-munication opportunities. RoboCup rescueintroduces the challenges of scaling up tomany more agents and coordinating multiplehierarchically organized teams.
In the competition, competing agents oper-ate simultaneously in independent copies ofthe world. That is, they don’t compete againsteach other directly but, rather, compare theirperformance under similar circumstances. Thescoring metric is such that human lives saved isthe most important measure, with injuries andbuilding damage serving to break ties.
Seven teams competed in the 2001 RoboCuprescue competition. The winning team wasYABAI from the University of Electro-Commu-nications in Japan.
RoboCup JuniorRoboCup junior (figure 5) aims to develop edu-cational methods and materials using roboticsemanating from the RoboCup soccer theme.Following on the success of activities held at
RoboCup-2000, this year, RoboCup Juniorhosted 24 teams totaling nearly 100 partici-pants from the local Washington area and oth-er U.S. states as well as Australia, Germany, andthe United Kingdom.
RoboCup Junior 2001, chaired by ElizabethSklar, included three challenges: (1) soccer, (2)rescue, and (3) dance. These categories aredesigned to introduce different areas withinthe field of robotics, such as operation withinstatic versus dynamic environments, coordina-tion in multiplayer scenarios, and planningwith incomplete information. The challengesalso emphasize both competitive and collabo-rative aspects for the teams, both within thegames and throughout preparation. In particu-lar, the dance challenge allows students tobring creativity in terms of art and music to anevent that traditionally focuses on engineer-ing.
Extensive feedback and analysis has beenmade through interviewing students and men-tors who have participated in RoboCup juniorevents. This research by committee membersand collaborators is ongoing and involves eval-uation of the effectiveness of educational teamrobotics.
Articles
SPRING 2002 65
ConclusionIn a dynamically changing environmentsuch as RoboCup, where most objects aremoving around most of the time, we neednear–real-time (25 frames a second)
response from the robot vision system forfast decision making. Although the tradi-tional methods of image processing for seg-mentation, edge detection, and object find-ings are very accurate,with the processingcapabilities of PCs today, these methods are
not able to respond in real-time speed. Toovercome this processing speed problem,we preferred to have a nonexact, but reli-able, solution to the vision problem.
Fast object detection was achieved bychecking the color of pixels at jump pointsand defining a rectangular shape boundingbox around each detected object. To sim-plify the calculations, the distance andangle of an object from the robot is esti-mated to be that of this rectangle.
Although we obtained satisfactoryresults from our method in real soccerrobot competitions, we believe the combi-nation of a CCD camera in front and anomnidirectional viewing system on top ofthe robot can give a more reliable perfor-mance, especially for localization.
— M. JamzadB. S. SadjadV. S. MirrokniM. KazemiH. ChitsazA. Heydarnoori,M. T. HajiaghaiE. Chiniforooshan
wn w3 w2 w1
fn f3
f2f1
robot
field
wall
Figure C. An Illustration of a Robot View.Straight lines w ifi show the pass of water dropped from the top of the wall.

RoboCup-2001).4 Special thanks to all the par-ticipating teams (see sidebar), without whomRoboCup would not exist. Thanks also to Eliz-abeth Sklar for input on the RoboCup juniorsection.
Notes1. Mao Chen, Ehsan Foroughi, Fredrik Heintz, SpirosKapetanakis, Kostas Kostiadis, Johan Kummeneje,Itsuki Noda, Oliver Obst, Patrick Riley, Timo Steffens,YiWang, and Xiang Yin. Users manual: RoboCup soc-cer server manual for SOCCER SERVER 7.07 and later.Available at http://sourceforge.net/projects/sserver/.
2. All technical information on PINO is now availableunder GNU General public licensing as OpenPINOplatform PHR-001 (www.openpino.org/).
3. For more information, visit www.robocup. org.
4. See www.robocup.org/games/01Seattle/315.html)as well as the RoboCup executive committee(www.cs.cmu.edu/~robocup2001/robocup-federa-tion.html
ReferencesGong, Y., and Sakauchi, M. 1995. Detection ofRegions Matching Specified Chromatic Features.Computer Vision and Image Understanding 61(2):163–269.
Humanoid ExhibitionThe humanoid exhibition, chaired byDominique Duhaut, had only one partici-pant—the PINO team—and received major atten-tion. PINO is a small-size (70 centimeters inheight) humanoid robot that can walk and fol-low the ball (figure 6). It was developed by ERA-TO Kitano Symbiotic Systems Project, which isa five-year government-founded project inJapan. A paper describing biped walking controlfor PINO won this year’s Scientific ChallengeAward for development of an energy minimumwalking method (see the sidebar). An interest-ing feature of PINO is that it was designed to beopen platform for humanoid research and onlyuses low-cost off-the-shelf components.2
ConclusionRoboCup-2001 continued the ongoing, grow-ing research initiative that is RoboCup.RoboCup-2002 will take place in June 2002 inFukuoka, Japan, and Pusan, South Korea.3
AcknowledgmentsWe thank the full organizing committee of
Articles
66 AI MAGAZINE
Figure 6. PINO, the Humanoid Robot.

Articles
SPRING 2002 67
Soccer-Simulation League11MONKEYS3, Keio University, Japan, Keisuke
SuzukiANDERLECHT, IRIDIA-ULB, Belgium, Luc Berre-
waertsAT HUMBOLDT 2001, Humboldt University Berlin,
Germany, Joscha BachA-TEAM, Tokyo Institute of Technology, Japan,
Hidehisa Akiyama,ATTUNITED-2001, AT& T Labs-Research, USA,
Peter Stone BLUTZLUCK, University of Leuven, Belgium, Josse
Colpaert CHAMELEONS’01, Carnegie Mellon University,
USA, Paul CarpenterCROCAROOS, University of Queensland, Australia,
Mark Venz CYBEROOS2001, CSIRO, Australia, Mikhail
Prokopenko DIRTY DOZEN, Institute for Semantic Information
Processing, Germany, Timo Steffens DRWEB (POLYTECH), State Technical University,
Russia, Sergey AkhapkinESSEX WIZARDS, University of Essex, Huosheng Hu FC PORTUGAL 2000, Universidades do Porto e
Aveiro, Portugal, Luis Paulo Reis FC PORTUGAL 2001, Universidade de Aveiro, Portu-
gal, Nuno Lau FCTRIPLETTA, Keio University, Japan, Norihiro
Kawasaki FUZZYFOO, Linkopings Universitet, Sweden,
Mikael Brannstrom GEMINI, Tokyo Institute of Technology, Japan,
Masayuki Ohta GIRONA VIE, University of Girona, Spain, Israel
Muñoz HARMONY, Hokkaido University, Japan, Hidenori
KawamuraHELLI-RESPINA 2001, Allameh Helli High School,
Iran, Ahmad MorshedianJAPANESE INFRASTRUCTURE TEAM, Future University-
Hakodate, Japan, Hitoshi MatsubaraKARLSRUHE BRAINSTORMERS, Universitaet Karlsruhe,
Germany, Martin RiedmillerLAZARUS, Dalhousie University, Canada, Anthony
YuenLIVING SYSTEMS, Living Systems, Germany, Klaus
DorerLUCKY LUBECK, University of Lubeck, Germany,
Daniel PolaniMAINZ ROLLING BRAINS, Johannes Gutenberg Univer-
sity, Germany, Felix FlentgeNITSTONES, Nagoya Institute of Technology,
Japan, Nobuhiro ItoOULU 2001, University of Oulu, Finland, Jarkko
KemppainenPASARGAD, AmirKabir University of Technology,
Iran, Ali Ajdari RadRMIT GOANNAS, RMIT, Australia, Dylan Mawhinney ROBOLOG 2001, University of Koblenz, Germany,
Frieder Stolzenburg SALOO, AIST/JST, Japan, Itsuki Noda SBCE, Shahid Beheshti University, Iran, Eslam
Nazemi SHARIF-ARVAND, Sharif University of Technology,
Iran, Jafar Habibi TEAM SIMCANUCK, University of Alberta, Canada,
Marc Perron TSINGHUAEOLUS, Tsinghua University, P. R. China,
Shi Li TUT-GROOVE, Toyohashi University of Technology,
Japan, Watariuchi Satoki UTUTD, University of Tehran, Iran, Amin Bagheri UVA TRILEARN 2001, Universiteit van Amsterdam,
The Netherlands, Remco de Boer VIRTUAL WERDER, University of Bremen, Germany,
Ubbo Visser
WAHOO WUNDERKIND FC, University of Virginia,USA, David Evans
WRIGHTEAGLE2001, University of Science andTechnology of China, P. R. China, Chen XiaoP-ing
YOWAI2001, University of Electro-Communica-tions, Japan, Koji Nakayama
ZENG01, Fukui University, Japan, Takuya Morishi-ta
Rescue-Simulation LeagueARIAN, University of Technology, Iran, Habibi
Jafar SharifGEMINI-R, Tokyo Institute of Technology, Japan,
Masayuki OhtaJAISTR, Japan Advanced Institute of Science and
Technology, Japan, Shinoda KosukeNITRESCUE, Nagoya Institute of Technology,
Japan, Taku SakushimaRESCUE-ISI-JAIST, University of Southern California,
USA, Ranjit NairRMIT ON FIRE, RMIT University Australia, Lin
PadghamYABAI, University of Electro-Communications,
Japan, Takeshi Morimoto
Small-Size Robot League4 STOOGES, University of Auckland, New Zealand,
Jacky Baltes5DPO, University of Porto, Portugal, Paulo CostaCM-DRAGONS’01, Carnegie Mellon University, USA,
Brett BrowningCORNELL BIG RED, Cornell University, USA, Raffael-
lo D’AndreaFIELD RANGERS, Singapore Polytechnic, Singapore,
Hong Lian SngFU FIGHTERS, Universitt Berlin, Germany, Sven
Behnke FreieFU-FIGHTERS-OMNI, Universitt Berlin, Germany,
Raul Rojas FreieHWH-CATS, College of Technology and Commerce,
Taiwan, R.O.C., Kuo-Yang Tu Hwa HsiaKU-BOXES2001, Kinki University, Japan, Harukazu
IgarashiLUCKY STAR II, Singapore Polytechnic, Singapore,
Ng Beng KiatOMNI, Osaka University, Japan, Yasuhiro MasutaniOWARIBITO, Chubu University, Japan, Tomoichi
TakahashiROBOROOS 2001, University of Queensland, Aus-
tralia, Gordon WyethROBOSIX UPMC-CFA, University Pierre and Marie
Curie, France, Ryad BenosmanROGI TEAM, University of Girona, Spain, Bianca
Innocenti BadanoROOBOTS, The University of Melbourne, Australia,
Andrew Peel SHARIF CESR, Sharif University of Technology, Iran,
Mohammad T. Manzuri TEAM CANUCK, University of Alberta, Canada,
Hong Zhang TPOTS, Temasek Engineering School, Singapore,
Nadir Ould Khessal UW HUSKIES, University of Washington, USA, Dinh
Bowman VIPERROOS, University of Queensland, Australia,
Mark Chang
Middle-Size Robot LeagueAGILO ROBOCUPPERS, Munich University of Tech-
nology, Germany, Michael BeetzARTISTI VENETI, Padua University, Italy, Enrico Pag-
elloCLOCKWORK ORANGE, University of Technology, The
Netherlands, Pieter Jonker Delft
CMHAMMERHEADS’01, Carnegie Mellon University,USA, Tucker Balch
COPS STUTTGART, University of Stuttgart, Ger-many, Reinhard Lafrenz
CS FREIBURG, University of Freiburg, Germany,Bernhard Nebel
EIGEN, Keo University, Japan, Kazuo YoshidaFUN2MAS, Politecnico di Milano, Italy, Andrea
BonariniFUSION, Fukuoka University, Japan, Matsuoka
TakeshiGMD-ROBOTS, GMD-AIS, Germany, Ansgar Breden-
feldISOCROB, Instituto de Sistemas e Robtica, Portu-
gal, Pedro LimaJAYBOTS, Johns Hopkins University, USA, Darius
BurschkaMINHO, University of Minho, Portugal, António
RibeiroROBOSIX, University Pierre and Marie Curie,
France, Ryad BenosmanSHARIF CE, Sharif University of Technology, Iran,
Mansour JamzadSPQR, University “La Sapienza,” Italy, Luca IocchiTHE ULM SPARROWS, University of Ulm, Germany,
Gerhard KraetzschmarTRACKIES, Osaka University, Japan, Yasutake Taka-
hashi
Sony Legged-Robot LeagueARAIIBO, University of Tokyo, Japan, Tamio AraiASURA, Fukuoka Institute of Technology, Japan,
Takushi TanakaBABYTIGERS 2001, Osaka University, Japan, Minoru
Asada CERBERUS, Bogazici University, Turkey, Levent
Akin, and Technical Univ. of Sofia, Bulgaria,Anton Topalov
CMPACK’01, Carnegie Mellon University, USA,Manuela Veloso
ESSEX ROVERS, University of Essex, UK, HuoshengHu
GERMAN TEAM, Humboldt University Berlin, Ger-many, Hans- Dieter Burkhard
LES 3 MOUSQUETAIRES, LRP, France, Pierre BlazevicMCGILL REDDOGS, McGill University, Canada,
Jeremy CooperstockROBOMUTTS++, The University of Melbourne, Aus-
tralia, Nick BarnesSPQR-LEGGED, University “La Sapienza,” Italy,
Daniele NardiTEAM SWEDEN, Orebro University, Sweden, Alessan-
dro SaffiottiUNSW UNITED, University of New South Wales,
Australia, Claude SammutUPENNALIZERS, University of Pennsylvania, USA,
Jim OstrowskiUSTC WRIGHT EAGLE, University of Science and
Technology of China, P. R. China, XiaopingChen
UW HUSKIES, University of Washington, USA,Dieter Fox
Robot Rescue LeagueEDINBURGH, University of Edinburgh, UK, Daniel
FarinhaSHARIF-CE, Sharif University of Technology, Iran,
Amir JahangirSWARTHMORE, Swarthmore College, USA, Gil JonesUTAH, Utah State University, USA, Dan StormontMINNESOTA, University of Minnesota, USA, Paul
RybskiFLORIDA, University of South Florida, USA, Robin
Murphy
Table 1. RoboCup 2001 Teams.

Articles
68 AI MAGAZINE
Gonzalez, R. C., and Woods, R. E. 1993. Digital ImageProcessing. Reading, Mass.: Addison-Wesley.
Jamzad, M.; Foroughnassiraei, A.; Chiniforooshan,E.; Ghorbani, R.; Kazemi, M.; Chitsaz, H.; Mobasser,F.; and Sadjed, S. B. 2000. Middle-Sized Robots:ARVAND. In RoboCup-99: Robot Soccer World Cup II,74–84. Stockholm: Springer.
Kitano, H., and Asada, M. 1998. RoboCup HumanoidChallenge: That’s One Small Step for a Robot, OneGiant Leap for Mankind. In Proceedings of the Inter-national Conference on Intelligent Robots and Sys-tems. Washington, D.C.: IEEE Computer Society.
Kitano, H.; Tambe, M.; Stone, P.; Veloso, M.; Corade-schi, S.; Osawa, E.; Matsubara, H.; Noda, I.; and Asa-da, M. 1997. The RoboCup Synthetic Agent Chal-lenge ‘97. In Proceedings of the FifteenthInternational Joint Conference on Artificial Intelli-gence, 24–29. Menlo Park, Calif.: International JointConferences on Artificial Intelligence.
McGeer, T. 1990. Passive Dynamic Walking. Interna-tional Journal of Robotics Research 9(2): 62–82.
Noda, I.; Matsubara, H.; Hiraki, K.; and Frank, I.1998. SOCCER SERVER: A Tool for Research on Multia-gent Systems. Applied Artificial Intelligence 12:233–250.
Sangwine, S. J., and Horne, R. E. N. 1998. The ColourImage-Processing Handbook. New York: Chapman andHall.
Stone, P. 2002. ATTUnited-2001: Using Heteroge-neous Players. In RoboCup-2001: Robot Soccer WorldCup V, eds. A. Birk, S. Coradeschi, and S. Tadokoro.Berlin: Springer Verlag. Forthcoming.
Yamasaki, F.; Endo, K.; Asada, M.; and Kitano, H.2001. A Control Method for Humanoid Biped Walk-ing with Limited Torque. Paper presented at the FifthInternational Workshop on RoboCup, 7–10 August,Seattle, Washington.
Yamasaki, F.; Matsui, T.; Miyashita, T.; and Kitano, H.2000. PINO, The Humanoid That Walks. In Proceed-ings of the First IEEE-RAS International Conferenceon Humanoid Robots. Washington, D.C.: IEEE Com-puter Society.
Yamasaki, F.; Miyashita, T.; Matsui, T.; and Kitano, H.2000. PINO, the Humanoid: A Basic Architecture.Paper presented at the Fourth International Work-shop on RoboCup, 31 August–1 September, Mel-bourne, Australia.
Manuela Veloso is associate profes-sor of computer science at CarnegieMellon University (CMU). Shereceived her Ph.D. in computer sci-ence from CMU in 1992. Shereceived a B.S. in electrical engi-neering in 1980 and an M.Sc. inelectrical and computer engineer-ing in 1984 from the Instituto
Superior Tecnico in Lisbon. Veloso’s long-termresearch goal is the effective construction of teams ofintelligent agents where cognition, perception, andaction are combined to address planning, execution,and learning tasks, in particular, in uncertain, dynam-ic, and adversarial environments. Veloso has devel-
oped teams of robotic soccer agents that have beenRoboCup world champions in three different leagues,namely, simulation (1998, 1999), CMU-built small-wheeled robots (1997, 1998), and Sony four-leggeddog robots (1998). Veloso is vice president of theRoboCup International Federation. She was awardeda National Science Foundation Career Award in 1995and the Allen Newell Medal for Excellence in Researchin 1997. Her e-mail address is [email protected].
Tucker Balch is an assistant pro-fessor of computing at the GeorgiaInstitute of Technology. He hasbeen involved in RoboCup since1997. Balch competed in roboticand simulation leagues, chairedthe organization of the small-sizeleague in 2000, and served as asso-ciate chair for robotic events for
RoboCup-2001. Balch is also a trustee of theRoboCup Federation. Balch’s research focuses oncoordination, communication, and sensing for mul-tiagent systems. He has published over 60 technicalarticles in AI and robotics. His book, Robot Teams,edited with Lynne Parker, will be published in 2002.His e-mail address is [email protected].
Peter Stone is a senior technicalstaff member in the Artificial Intel-ligence Principles Research De-partment at AT&T Labs Research.He received his Ph.D. in 1998 andhis M.S. in 1995 from CarnegieMellon University, both in com-puter science. He received his B.S.in mathematics from the Universi-
ty of Chicago in 1993. Stone’s research interestsinclude planning and machine learning, particularlyin multiagent systems. His doctoral thesis researchcontributed a flexible multiagent team structure andmultiagent machine learning techniques for teamsoperating in real-time noisy environments in thepresence of both teammates and adversaries. He iscurrently continuing his investigation of multiagentlearning at AT&T Labs. His e-mail address [email protected].
Hiroaki Kitano is a senior re-searcher at Sony Computer Sci-ence Laboratories, Inc.; director ofERATOKitano Symbiotic SystemsProject, Japan Science and Tech-nology Corporation, a govern-ment organization for basic sci-ence; and president of TheRoboCup Federation. Kitano was a
visiting researcher at Carnegie Mellon Universityfrom 1988 to 1993 and received a Ph.D. in computerscience from Kyoto University in 1991. Kitanoreceived The Computers and Thought Award fromIJCAI in 1993 and the Prix Ars Electronica in 2000.His e-mail address is [email protected].