Embed Size (px)
Citation preview
Research Collection
Report
Nichtlineare FE-Analyse von Stahlbetonplatten und -schalenmittels linearisierter Fliessbedingungen im Knotenkraftraum
Author(s): Glanzer, Günter Fritz
Publication Date: 2000
Permanent Link: https://doi.org/10.3929/ethz-a-004179665
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

Nichtlineare FE - Analysevon Stahlbetonplatten und -schalen
mittels linearisierter Fliessbedingungenim Knotenkraftraum
von
Günter Fritz Glanzer
Institut für Baustatik und Konstruktion
Eidgenössische Technische Hochschule Zürich
November 2000
I
Vorwort
Die zielgerechte Dimensionierung der Bewehrung von Flächentragwerken aus Stahlbe-
ton sowie die darauffolgenden Nachweise aufgrund von Tragsicherheitsanforderungen
sind Problemstellungen, welche in der Praxis oft Schwierigkeiten bereiten. Der Haupt-
grund dafür liegt darin, dass bei Flächentragwerken eine rein elastische Bestimmung der
Schnittkräfte nicht befriedigend ist. Wegen der statischen Unbestimmtheit solcher Trag-
werke und der beim Stahlbeton immer wieder beobachteten Fähigkeit zur sogenannten
„Selbsthilfe des Materials“ bei lokalen Überbeanspruchungen ist es notwendig, Schnitt-
kraftumlagerungen zu berücksichtigen.
Aufgrund dieser Feststellungen hat man vor einigen Jahren ein umfassendes For-
schungsprojekt in Angriff genommen, das die computerunterstützte, optimale elastopla-
stische Bemessung der Bewehrung von Flächentragwerken zum Ziel hat. Dies erfolgt
nach einem neu konzipierten, auf den einfachen Grenzwertsätzen der Plastizitätstheorie
basierenden Verfahren. Dieses Bemessungsverfahren, welches bereits Eingang in die
Praxis gefunden hat, erlaubt zwar eine sichere und rationale Dimensionierung der Be-
wehrung, liefert jedoch keine Auskunft über die zu erwartende Verteilung der plasti-
schen Verformungen und der daraus resultierenden Verschiebungen. Insbesondere
bleibt die heute als wichtig betrachtete Frage des Duktilitätsbedarfs vom Bewehrungs-
stahl unbeantwortet.
Herrn Glanzer wurde deswegen die Aufgabe gestellt, ein Verfahren zu entwickeln, bei
dem die äusseren Lasten bis zum Erreichen der Traglast in relativ kleinen Inkrementen
erhöht werden, wobei in jedem Lastschritt die dazugehörigen plastischen Verformun-
gen ermittelt werden. Traglast und Kollapsmechanismus werden damit bestimmt, was
eine unabhängige Kontrolle der vorher dimensionierten Bewehrung darstellt. Wichtiger
für die Praxis ist jedoch, dass sich damit der Duktilitätsbedarf der Stahlbewehrung nach-
weisen lässt.
Behandelt wurde der für die Praxis wichtige Fall der Stahlbetonplatten, die infolge von
Dickensprüngen, Unterzügen oder grossen Verschiebungen auch eine Membranwir-
kung aufweisen können. Im Vergleich zu herkömmlichen FE-Programmen für die nicht-
lineare Tragwerksanalyse zeichnet sich Herrn Glanzers Verfahren durch verschiedene
Neuerungen aus. Die wohl wichtigste liegt in der numerischen Erfassung des elastopla-
stischen Materialverhaltens "im Knotenkraftraum". Dabei werden die nichtlinearen Be-
ziehungen zwischen den Knotenverschiebungen jedes Elementes und den
dazugehörigen Kräften direkt, d.h. ohne die übliche Arbeitsintegration über das Ele-
mentvolumen formuliert.
Zu den weiteren, in Herrn Glanzers Verfahren eingeführten und in seinem Computer-
programm implementierten Neuerungen sind noch zu erwähnen: Die Herleitung der
II
geometrischen Steifigkeitsmatrix direkt aus den Membranknotenkräften (d.h. wiederum
"im Knotenkraftraum") sowie die Behandlung von Dickensprüngen, Unterzügen und lo-
kalen Maschenverfeinerungen mit Hilfe von automatisch generierten kinematischen
Bindungsgleichungen.
Schliesslich ist zu erwähnen, dass Herrn Glanzers Programm auch zur Abschätzung des
Tragwiderstandes existierender Plattentragwerke, d.h. unabhängig vom Bemessungs-
modul, eingesetzt werden kann. Dies ist für die Praxis interessant, da es oft vorkommt,
eine genauere Berechnung des tatsächlichen Tragwiderstandes bestehender Bauwerke
durchzuführen, sei es wegen einer nachträglichen Erhöhung der aufzunehmenden
Nutzlasten oder im Falle von Korrosionsschäden.
November 2000 Prof. Dr. E. Anderheggen
III
Zusammenfassung
Die vorliegende Arbeit ist Bestandteil eines grösseren Projektes, das die optimale Bemes-
sung und Analyse von Stahlbetonplatten und -schalen zum Inhalt hat. Da im Zuge der
Bemessung weder die Verformungen noch der Duktilitätsbedarf des Baustahles kontrol-
liert werden, analysiert folgende Arbeit einerseits diese Nachteile und liefert anderer-
seits als Zusatz noch die Traglast. Dafür wird ein nichtlineares Berechnungsverfahren
nach der Methode der finiten Elemente entwickelt, das ein eigens dafür entwickeltes Ele-
mentgesetz im Knotenkraftraum zum Kernstück hat.
Nach der Darstellung der kontinuumsmechanischen Grundlagen und der fundamenta-
len Gleichungen für eine finite Element Diskretisierung, folgt die Beschreibung der Ele-
mentmodelle. In dieser Arbeit werden drei- und vierknotige ebene Elemente nach der
Free Formulation Theorie für Platten und Schalen verwendet. Eine Formulierung mit ko-
rotierten Koordinaten erlaubt es, beschränkt auf kleine Verzerrungen, sowohl geometri-
sche, als auch materialbedingte Nichtlinearitäten zu berücksichtigen.
Um die Effizienz der nichtlinearen Analyse zu erhöhen, erfolgt hier eine Materialbe-
schreibung im Knotenkraft - Verschiebungsraum und nicht wie bisher im Spannungs -
Verzerrungsraum. Dieses Vorgehen hat den Vorteil, dass die Knotenkräfte mit den äus-
seren Knotenlasten exakt im Gleichgewicht sind, was für die Berechnung bzw. für die
Analyse von Stahlbetonkonstruktionen besonders wichtig ist. Ausserdem entfallen bei
dieser Modellierung auch die aufwendigen Integrationsprozeduren zur Neubildung der
Elementsteifigkeitsmatrix. Als Grundlage zur Materialbeschreibung dienen linearisierte
Fliessbedingungen, durch die sich elastoplastische Materialen beschreiben lassen. Zen-
trale Probleme sind einerseits die Entwicklung eines computergerechten Algorithmus
zur Modellierung dieses Materialgesetzes, welches in Folge als Elementgesetz bezeich-
net wird, und andererseits, um das Konzept der Knotenkräfte aufrecht zu erhalten, die
Herleitung der geometrischen Steifigkeitsmatrix für das Biegeverhalten aus den Mem-
branknotenkräften.
Abgerundet wird diese Arbeit noch durch zusätzliche Werkzeuge, wie die Maschenver-
feinerungen für bestimmte Strukturbereiche oder die Behandlung von unterschiedlichen
Plattenstärken. Auch ein Verfahren zur Modellierung von Unterzügen mittels Schalen-
elementen wird vorgestellt. Zum Abschluss wird das entwickelte Programm anhand
von numerischen Beispielen erläutert, und die daraus erhaltenen Lösungen mit theore-
tisch bekannten Lösungen verglichen. Auch die Handhabung des gesamten Programm-
paketes, welches Bemessungs- und Analysemodul vereint, wird anhand eines
praktischen Beispiels gezeigt.

Summary
IV
Summary
This thesis is part of a larger project involving the optimum reinforcement dimensioning
and nonlinear analysis of concrete plates and shells. During the optimisation process the-
re is no deflection and ductility check and therefore this work analyses these disadvan-
tages and in addition calculates the ultimate load. Therefore a nonlinear analysis is used,
based on the finite element method, which has as a main item a newly developed ele-
ment law in the element nodal force space.
After summarizing the basic equations of continuum mechanics and for finite element
discretisation, plate and plane shell elements with three or four nodes are described ba-
sed on the Free Formulation theory. A formulation with corotated coordinates allows,
for small strains only, to take into account geometrical and material nonlinearities.
In order to increase the efficiency of nonlinear analysis, a material description in the
nodal - displacement space and not as is usually done in the stress - strain space, is car-
ried out. This description has the advantage that the nodal forces are in perfect equilibri-
um both with one another and with the external loads. This is very important for
example in the analysis of reinforced concrete structures. In fact, the expensive numeri-
cal integration procedures for determining the tangential element stiffness matrices and
element forces are no longer needed. The basis of the material description with nodal
forces is the theory of plasticity as well as the method of linear yield conditions, which
has been applied successfully for elasto - plastic materials. The main problems to be sol-
ved were the development of an algorithm to allow a computerized modelling of elasto
- plastic materials in the element nodal force space with an element law, as well as, fol-
lowing the concept of the nodal forces, the determination of the geometric stiffness ma-
trix directly from the membrane nodal forces.
Finally, the development of some essential tools, like mesh refinement for certain struc-
tural regions and the treatment of different plate thicknesses is illustrated. Also a new
method of modelling beams with shell elements is proposed. The work is completed by
the presentation of the developed program and verifying it by means of some numerical
examples. These solutions are compared with the theoretical ones. The use of the whole
package, in combination with dimensioning and analysis, is demonstrated using practi-
cal examples.
V
Inhaltsübersicht
1 Problemstellung und Lösungsansatz
1.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Lösungsansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Methode der finiten Elemente
2.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Verschiedene Arten von Nichtlinearitäten . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Knotenkräfte und tangentielle Steifigkeitsmatrizen . . . . . . . . . . . . . . . . . . 10
2.4 Lastschrittalgorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Ablauf einer FE - Berechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Herkömmlicher dreistufiger Ablauf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Neues Ablaufschema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Elementmodelle
3.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Lineare Modelle für Platten- und Schalenelemente . . . . . . . . . . . . . . . . . . 21
Plattenelemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Schalenelemente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Verzerrungen und Spannungen bei grossen Verschiebungen . . . . . . . . . . 30
Verzerrungstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Spannungstensor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.4 Herleitung der geometrischen Steifigkeitsmatrix aus denMembranknotenkräften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Die geometrische Steifigkeitsmatrix aus den Knotenkräften . . . . . . . . . . . 37
3.5 Methode der korotierten Koordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweisfür ein finites Element
4.1 Grundlagen der Plastizitätstheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Inhaltsübersicht
VI
Grenzwertsätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2 Linearisierung der Fliessbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Stahlbetonscheiben. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Stahlbetonplatten und -schalen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3 Fliessbedingungen für Platten und Schalen im Knotenkraftraum . . . . . . . 62
Verallgemeinerte Grössen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Der Knotenkraftraum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Fliessbedingungen für Platten im Knotenkraftraum . . . . . . . . . . . . . . . . . 64
Fliessbedingungen für Schalen im Knotenkraftraum. . . . . . . . . . . . . . . . . 69
Linearisierte Fliessbedingungen für Dreieckelemente . . . . . . . . . . . . . . . . 75
Querkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.4 Plastische Widerstände aus den Bewehrungsfeldern . . . . . . . . . . . . . . . . . 79
4.5 Maschenparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.6 Duktilitätsnachweis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5 Elastoplastisches Elementgesetz im Knotenkraftraum
5.1 Grundlagen der ‘Face’ Methode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 Tableau - Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.3 Modifizierter Tableau - Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.4 Kontrollierter Rangabfall der Steifigkeitsmatrix . . . . . . . . . . . . . . . . . . . . 100
5.5 Verfestigungsgesetze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Kinematische Verfestigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Isotrope Verfestigung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6 Kinematische Bindungsgleichungen und ihre Anwendungen
6.1 Numerische Behandlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.2 Maschenverfeinerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
6.3 Dickensprünge in Platten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.4 Modellierung von Unterzügen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
7 Implementierung
7.1 Die Programmstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
7.2 Graphische Benutzerschnittstelle von IANA . . . . . . . . . . . . . . . . . . . . . . . 122
8 Beispiele
8.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
8.2 Quadratische Platte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Nichtlinearität im Materialverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Inhaltsübersicht
VII
Geometrische Nichtlinearität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
8.3 Platte mit Öffnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.4 Kreisplatte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
9 Schlussbetrachtungen
9.1 Zum verwendeten Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
9.2 Weitere Anregungen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
Anhang
A Newton - Raphson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
B Steifigkeitsparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Symbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Literaturverzeichnis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
1
1 Problemstellung und Lösungsansatz
1.1 Problemstellung
In den Arbeiten von Despot [12] (Stahlbetonscheiben), Steffen [27] (Stahlbetonplatten)
und Tabatabai [29] (räumliche Stahlbetonfaltwerke) werden zwei neue Grundideen zur
Bemessung von Flächentragwerken aus Stahlbeton vorgestellt. Die erste Grundidee be-
ruht darauf, dass die Plastizitätsbedingungen im Raum der Knotenkräfte und nicht, wie
sonst üblich, im Spannungsraum aufgestellt werden. Dabei wird jedes finite Element als
eine unabhängige Bemessungseinheit angesehen, das durch seine Knotenkräfte belastet
ist. Für diese Elementknotenkräfte werden mit Hilfe von verallgemeinerten Spannungs-
grössen die linearisierten Fliessbedingungen aufgestellt. Die Verwendung von Knoten-
kräften anstelle der Spannungen im Element stellt eine Approximation im Beschreiben
des Materialverhaltens dar, aber im Gegensatz zu den Spannungen sind die Knotenkräf-
te mit den äusseren Knotenlasten exakt im Gleichgewicht. Dieser Umstand scheint für
die Berechnung von Stahlbetonkonstruktionen wichtiger zu sein, als das de facto
schlecht modellierbare Materialverhalten von Stahlbeton. Auf dem unteren Grenzwert-
satz der Plastizitätstheorie beruht die zweite Grundidee. Diese besteht darin, dass die
elastische Spannungsverteilung infolge der äusseren Lasten durch Superposition von
homogenen lastfreien Gleichgewichtszuständen (Spannungszustände) so modifiziert
wird, dass die daraus ermittelte Bewehrungsverteilung optimal wird. Unter optimal ver-
steht man hier die Minimierung des Stahlgewichts in einer Stahlbetonkonstruktion unter
Berücksichtigung aller normentechnischer und konstruktiver Angaben. Für die Mini-
mierung des Stahlgewichts wird die lineare Programmierung (Simplex - Verfahren) ver-
wendet.
Dieses Bemessungsverfahren, das die Optimierung des Stahlgewichtes zum Ziel hat,
kontrolliert weder die Verformungen noch die Dehnungen (Duktilität) im Stahl. Um die-
se Nachteile aus dem Weg zu räumen, kam man auf die Idee, das vorliegende Projekt
zur Analyse von Stahlbetonplatten und -schalen durchzuführen. Neben den Verformun-
gen und den Dehnungen im Stahl liefert die Analyse noch zusätzlich die Traglast als Er-
gebnis.
1.2 Lösungsansatz
In dieser Arbeit wird, basierend auf der ersten Grundidee, ein ‘Elementgesetz’ als Mate-
rialgesetz hergeleitet. Um die Duktilität im Bewehrungsstahl und die Verformungen in
Problemstellung und Lösungsansatz
2
einer Stahlbetonplatte beurteilen zu können, muss ein Lastschrittverfahren verwendet
werden, wie es zur Lösung von nichtlinearen Problemen und zur Traglastermittlung in
der Strukturmechanik üblicherweise eingesetzt wird. Dieses Elementgesetz mit seiner
Formulierung im Knotenkraftraum führt im Berechnungs- bzw. Analyseablauf zur Ein-
sparung einer Berechnungsstufe. Der sonst dreistufige Ablauf (siehe 2.5.1), bestehend
aus System-, Element- und Materialstufe, wie er bei den meisten finiten Element Pro-
grammen vorkommt, reduziert sich durch den Wegfall der Materialstufe auf zwei Stu-
fen. Somit besteht das zweistufige System (siehe 2.5.2) nur mehr aus einer System- und
einer Elementstufe.
Auf Systemstufe kommt der Newton - Raphson, bzw. der modifizierte Newton - Raph-
son Algorithmus als Zeitschrittverfahren zur Anwendung. Die Assemblierung der loka-
len Elementsteifigkeitsmatrizen zur globalen Steifigkeitsmatrix, die Bildung des
globalen Lastvektors, resp. die des Residuallastvektors sowie die Neulösung des Glei-
chungssystems fällt somit in diese Stufe.
Aufgabe der Elementstufe ist es, aus dem momentanen Verschiebungszustand eines Ele-
ments die Knotenkräfte sowie die tangentielle Steifigkeitsmatrix zu bestimmen. Hier
wird für die Ermittlung der Elementknotenkräfte und der tangentiellen Steifigkeitsma-
trix nicht wie bisher ein Volumenintegral für das entsprechende Stoffgesetz in den dis-
kreten Integrationspunkten ausgewertet, sondern es kommt das Elementgesetz zum
Einsatz, das die Steifigkeitsmatrix mit den zugehörigen Elementknotenkräften direkt lie-
fert.
Das neu entwickelte Elementgesetz wird für dreieckige und viereckige Platten- und
Schalenelemente hergeleitet. Dazu muss das elastoplastische Materialgesetz im Knoten-
kraft - Verschiebungsraum aufgestellt werden, um für das gesamte Element gültig zu
sein. Basierend auf den Postulaten der klassischen Plastizitätstheorie wird eine Lineari-
sierung der nichtlinearen Fliessbedingungen vorgenommen, die die Fliessfigur durch li-
nearisierte d.h. aus ebenen Teilflächen bzw. Hyperebenen aufgebaute Fliessflächen
approximiert. Diese Fliessbedingungen werden nicht punktweise für die Spannungs-
werte im Element, sondern für die Elementknotenkräfte formuliert. Es können dabei ver-
schiedene Arten der Materialverfestigung (kinematische und isotrope)
mitberücksichtigt werden, aber keine zeitabhängigen Effekte wie Kriechen und Schwin-
den. Besondere Sorgfalt wird auch auf die numerische Effizienz des Elementgesetzes ge-
legt, für dessen Behandlung ein eigener Tableaualgorithmus (siehe Kapitel 5) entwickelt
wird. Dieser Algorithmus liefert die materialbedingte tangentielle Steifigkeitsmatrix di-
rekt.
Zur Behandlung der grossen Verschiebungen wird die Methode der korotierten Koordi-
naten verwendet. Die einzelnen Elemente können beliebig grossen Starrkörperverschie-
bungen und -rotationen ausgesetzt sein, die Verzerrungen im Element hingegen müssen
klein bleiben. Somit kann das Elementgesetz auch in einem lokalen, mit dem Element
mitgehenden Koordinatensystem formuliert werden, was eine unabdingbare Vorausset-
zung für die Anwendung der klassischen Plastizitätstheorie ist. Im Zuge dieser Formu-
lierung wird auch erstmals die Bildung der geometrischen Steifigkeitsmatrix für das
Lösungsansatz
3
Biegeverhalten aus den Elementknotenkräften der Membranwirkung gezeigt. Dem Kon-
zept der Knotenkräfte bleibt man damit treu. Die direkte Bildung aus den Knotenkräften
führt auch hier zum Wegfall der Integration über das Elementgebiet.
Ergänzt wird das Projekt durch kinematische Bindungsgleichungen. Diese erlauben die
Berücksichtigung von Beschränkungen oder Zwängungen an bestimmten Lösungsva-
riablen. So können auch die in der Praxis oft vorkommenden Fälle, wie z.B. Dicken-
sprünge, konsistent modelliert werden. Auch die Verfeinerung der Masche, was
beispielsweise bei hohen Lastkonzentrationen sinnvoll ist, wird über Bindungsgleichun-
gen behandelt. Abgerundet wird das Thema der kinematischen Bindungsgleichungen
durch die Modellierung von Unterzügen mittels Schalenelementen. Hierzu wird eine
spezielle ‘Master’ - ‘Slave’ Beziehung vorgeschlagen. Die Erkenntnisse daraus werden
mit der klassischen Balken - Schalenlösung verglichen.
Für das hier vorgestellte Projekt gelten noch folgende Einschränkungen
Es können nur ebene Platten- und Schalenstrukturen berechnet werden.
Die Elementformulierung beruht auf der klassischen Theorie dünner Platten und
Schalen ohne Schubverformungen senkrecht zur Schalenebene.
Die einzelnen Schalenelemente einer Struktur können beliebig grosse Starrkörper-
verschiebungen und -rotationen ausführen. Die Verzerrungen müssen dabei aber
klein bleiben, da angenommen wird, dass die ursprüngliche Form des Elementes
sich nur infintesimal ändert.
Elementlasten bleiben während der Verformung nach Richtung und Grösse gleich.
Es werden keine Lasten behandelt, deren Richtungen von den Verschiebungen der
Struktur abhängig sind.
Es können elastoplastische Materialien mit kinematischer oder isotroper Verfesti-
gung behandelt werden. Zeitabhängige Materialeigenschaften, wie Kriechen und
Schwinden, werden nicht berücksichtigt.
Konstruktionsdetails, wie z.B. die Ausbildung von Auflagern und die Einleitung
von hohen Einzellasten, werden ausser Betracht gelassen. Auch die Anordnung und
konstruktive Ausbildung der Bewehrung, z.B. im Eckbereich von Platten, wird nicht
behandelt. Bei der Definition der Bewehrungsfelder muss daher die Verankerungs-
länge der Stähle bereits enthalten sein.
Zur Analyse von Stahlbetonplatten und -schalen wird mit dem neuen Elementgesetz
auch ein graphisch interaktives Computerprogramm ‘IANA’ (Incremental ANAlysis)
erstellt. Dieses kann als ‘Nachlaufmodul’ an die optimale Bemessung verwendet wer-
den, oder auch als eigenständiges Programm zur Duktilitätskontrolle und zur Traglast-
analyse von bereits existierenden Gebäudeteilen. Hier wird der Bewehrungsgehalt und
die Anordnung der Bewehrung aus bestehenden Plänen entnommen, während bei der
Bemessung mit optimierten Bewehrungsgehalten aus gewählten Bewehrungsfeldern ge-
arbeitet wird. Da diese neue Analysemethode auch der Praxis dienen soll, wurde auf
eine einfache Handhabung und Benutzerfreundlichkeit des Programms grossen Wert
gelegt.

Problemstellung und Lösungsansatz
4
1.3 Übersicht
Die vorliegende Arbeit gliedert sich im wesentlichen in vier Abschnitte: Der erste Teil be-
handelt vor allem die in diesem Projekt benötigten Grundlagen der Kontinuumsmecha-
nik, sowie die zum allgemeinen Verständnis notwendigen Begriffe. Der zweite Teil ist
den Elementmodellen gewidmet. Dabei wird auch die Herleitung der geometrischen
Steifigkeitsmatrix aus den Elementknotenkräften gezeigt. Die Modellierung und die Be-
handlung des Elementgesetzes bilden den Hauptbestandteil des dritten Abschnitts. Der
letzte Teil erörtert weitere Modellierungswerkzeuge mit einer Beschreibung des dazu
entwickelten Programms IANA. Abschliessend werden anhand von praktischen Bei-
spielen die Anwendungsmöglichkeiten von IANA aufgezeigt.
5
2 Methode der finiten Elemente
2.1 Einführung
Zur Lösung von kontinuumsmechanischen Differentialgleichungen werden heute zu-
meist Näherungsverfahren verwendet, da eine geschlossene Lösung in den seltensten
Fällen möglich ist. Diese Näherungsverfahren haben zum Ziel, den Verschiebungs-, den
Verzerrungs- und den Spannungszustand eines Tragwerkes für einen bestimmten Zeit-
punkt zu ermitteln. Diese drei Zustände werden durch ortsabhängige vektorielle Grös-
sen erfasst. Dabei wird der Verschiebungszustand durch den Vektor , der
Verzerrungszustand durch den Vektor und der Spannungszustand durch den Vektor
erfasst (Anderheggen [2], Bathe [6]).
Betrachtet man zunächst ein lineares Tragwerksverhalten, so bestehen zwischen den
Komponenten der oben erwähnten Vektoren lineare Zusammenhänge. Die Verzerrun-
gen sind dabei eine lineare Funktion der Verschiebungen
(2.1)
Mit wird die lineare Operatormatrix bezeichnet, welche vom jeweiligen Problemtyp
(Scheibe, Platte, etc.) abhängig ist. Setzt man weiter ein linear - elastisches Materialver-
halten voraus, so lassen sich die Spannungen aus der linearen Beziehung
(2.2)
berechnen. Die Matrix bezeichnet die materialabhängige, positiv - definite Elastizi-
tätsmatrix und bezeichnet die initialen Verzerrungen wie z.B. eine Temperaturein-
wirkung.
Die Methode der finiten Elemente ist ein Näherungsverfahren zur Lösung von kontinu-
umsmechanischen Problemstellungen. Bei dieser Methode wird eine bestehende Struk-
tur als ein Verbund von ‘finiten’ Elementen aufgefasst, deren mechanisches Verhalten
mit Hilfe von lokalen Elementmatrizen und Elementlastvektoren beschrieben wird. Dar-
aus können die globalen Systemmatrizen und Lastvektoren ermittelt werden, die
schliesslich das Gesamtsystem beschreiben. Dies ist möglich, weil die einzelnen finiten
Elemente in den Knotenpunkten miteinander verbunden sind, in denen geeignete Kno-
tenverschiebungsparameter eingeführt werden. Diese Knotenverschiebungsparameter
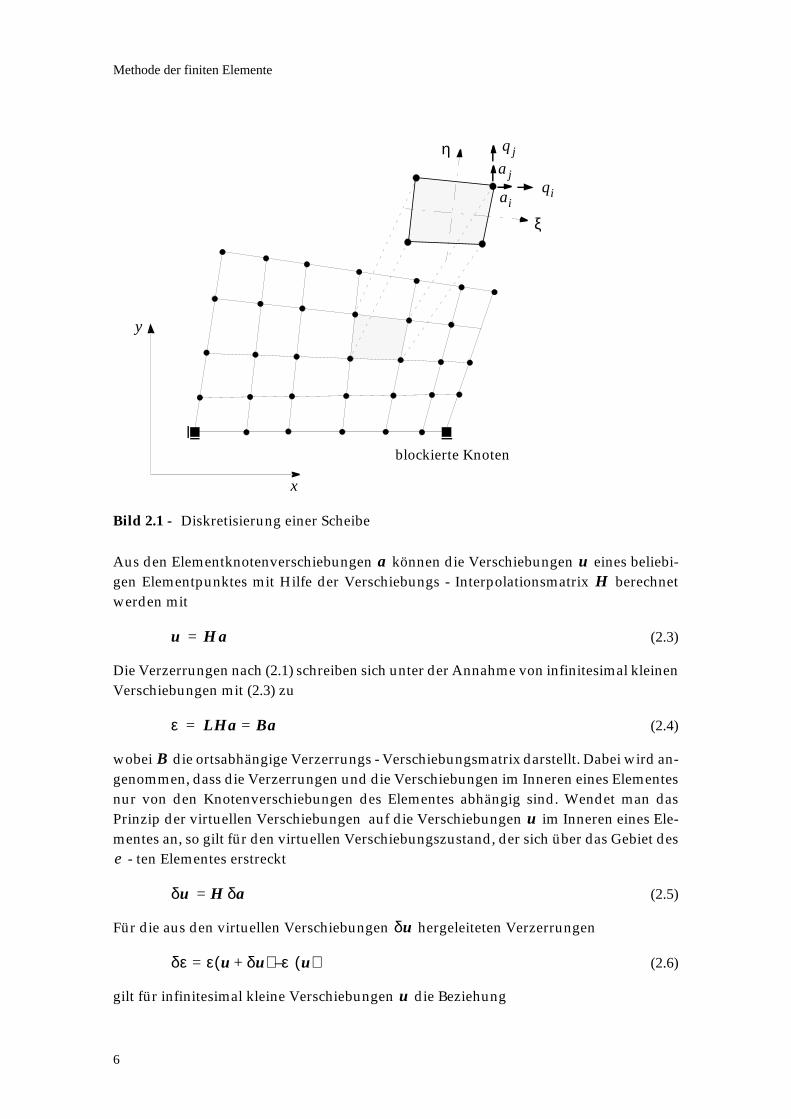
sind vom jeweiligen Tragwerkstyp abhängig. Bild 2.1 zeigt z.B. eine durch finite Elemen-
te diskretisierte Scheibe. Für ein einzelnes Element sind die Knotenverschiebungen
und sowie die Knotenkräfte und dargestellt.
uε
σ
ε u
ε L u=
L
σ D ε ε0–( )=
Dε0
aiaj qi qj
Methode der finiten Elemente
6
Bild 2.1 - Diskretisierung einer Scheibe
Aus den Elementknotenverschiebungen können die Verschiebungen eines beliebi-
gen Elementpunktes mit Hilfe der Verschiebungs - Interpolationsmatrix berechnet
werden mit
(2.3)
Die Verzerrungen nach (2.1) schreiben sich unter der Annahme von infinitesimal kleinen
Verschiebungen mit (2.3) zu
(2.4)
wobei die ortsabhängige Verzerrungs - Verschiebungsmatrix darstellt. Dabei wird an-
genommen, dass die Verzerrungen und die Verschiebungen im Inneren eines Elementes
nur von den Knotenverschiebungen des Elementes abhängig sind. Wendet man das
Prinzip der virtuellen Verschiebungen auf die Verschiebungen im Inneren eines Ele-
mentes an, so gilt für den virtuellen Verschiebungszustand, der sich über das Gebiet des
- ten Elementes erstreckt
(2.5)
Für die aus den virtuellen Verschiebungen hergeleiteten Verzerrungen
(2.6)
gilt für infinitesimal kleine Verschiebungen die Beziehung
ai
ajqi
qj
ξ
η
y
x
blockierte Knoten
a uH
u H a=
ε LHa Ba==
B
u
e
δu H δa=
δu
δε ε u δu+( ) ε u( )–=
u

Einführung
7
(2.7)
wobei die zu den kinematisch kompatiblen Knotenverschiebungen bezeichnet.
Sucht man die Knotenkräfte , die von einem Element auf das Nachbarelement übertra-
gen werden, so ergeben sich diese zu
(2.8)
mit als Lastvektor der externen Lasten und mit , die zu den inneren Spannungen
statisch äquivalenten Knotenkräfte. Drückt man das Gleichgewicht über die virtuelle
Arbeitsgleichung
(2.9)
aus, die für beliebige gültig ist, so errechnen sich daraus die Elementknotenkräfte
mit
(2.10)
Dabei bezeichnet das Volumen des Elements. Ersetzt man durch (2.2) und durch
(2.4) so können die Knotenkräfte noch aus
(2.11)
berechnet werden. Darin ist die linear - elastische Steifigkeitsmatrix und der Last-
vektor infolge der im Element vorgeschriebenen initialen Verzerrungen . Nun werden
die lokalen Elementmatrizen und Elementlastvektoren zur globalen Steifigkeitsmatrix
und zum globalen Lastvektor zusammengefasst. Nachdem die Auflagerbedingungen
und sonstige kinematische Bindungsgleichungen berücksichtigt sind, erhält man für den
linearen Fall das folgende lineare algebraische Gleichungssystem
(2.12)
das nach den unbekannten Verschiebungen zu lösen ist. stellt die globale Steifig-
keitsmatrix des Systems dar, den globalen Lastvektor. Die globale Steifigkeitsmatrix
wird durch die Beiträge der einzelnen Steifigkeitsmatrizen aus den Elementen ge-
bildet. Eine wichtige numerische Eigenschaft ist, dass die globale Steifigkeitsmatrix
positiv definit ist bzw. positiv definit gemacht werden kann. Die Steifigkeitsmatrix
wird dann als positiv definit bezeichnet, wenn die innere Verzerrungsenergie des Sy-
stems, die sich aus berechnet, für jeden beliebigen Vektor grösser Null
wird. Vorausgesetzt wird dabei, dass die Struktur stabil gelagert ist und ist. Ist die
Struktur instabil bzw. nicht gelagert, so existiert eine bestimmte Anzahl von linear un-
abhängigen Vektoren , für die der Ausdruck wird und folglich
auch . Für den Verschiebungsvektor wird in diesem Fall keine Verzer-
δε Lδu B δa==
δa δuq
q p– f b+=
f b b p
δaT p δεTσ VdV∫= δaT BTσ Vd
V∫=
δa p
p BTσ VdV∫=
V σ εp
p BT DB VdV∫
a BTD ε0 V ka f 0–=dV∫–=
k f 0ε0
KA F=
A KF
K kKK
1 2⁄ ATK A AA 0≠
qA1 A2 … Aq, , , K A i 0=
A iTK A i 0= A i
Methode der finiten Elemente
8
rungsenergie im System gespeichert. Der Vektor stellt dann einen sogenannten Starr-
körpermode dar, demnach ist die Anzahl möglicher Starrkörpermoden. Die innere
Verzerrungsenergie wird dann zu und wird daher als positiv semi-
definit bezeichnet.
2.2 Verschiedene Arten von Nichtlinearitäten
Da im Bereich der nichtlinearen Strukturmechanik keine einheitliche Auffassung über
die Bedeutung der einzelnen Begriffe besteht, soll an dieser Stelle kurz aufgezeigt wer-
den, welche Arten von Nichtlinearitäten existieren und welchen Stellenwert sie im Rah-
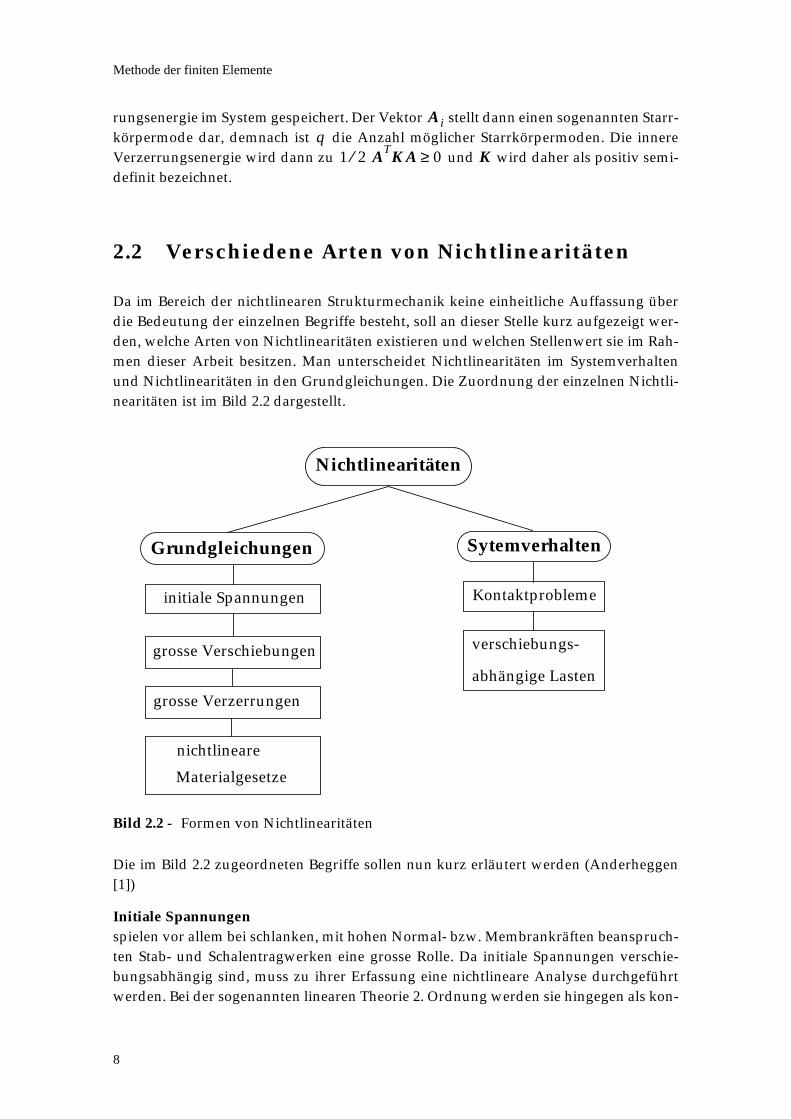
men dieser Arbeit besitzen. Man unterscheidet Nichtlinearitäten im Systemverhalten
und Nichtlinearitäten in den Grundgleichungen. Die Zuordnung der einzelnen Nichtli-
nearitäten ist im Bild 2.2 dargestellt.
Bild 2.2 - Formen von Nichtlinearitäten
Die im Bild 2.2 zugeordneten Begriffe sollen nun kurz erläutert werden (Anderheggen
[1])
Initiale Spannungenspielen vor allem bei schlanken, mit hohen Normal- bzw. Membrankräften beanspruch-
ten Stab- und Schalentragwerken eine grosse Rolle. Da initiale Spannungen verschie-
bungsabhängig sind, muss zu ihrer Erfassung eine nichtlineare Analyse durchgeführt
werden. Bei der sogenannten linearen Theorie 2. Ordnung werden sie hingegen als kon-
A iq
1 2⁄ ATK A 0≥ K
Nichtlinearitäten
SytemverhaltenGrundgleichungen
Kontaktprobleme
verschiebungs-
abhängige Lasten
initiale Spannungen
grosse Verschiebungen
grosse Verzerrungen
nichtlineare
Materialgesetze
Verschiedene Arten von Nichtlinearitäten
9
stant und als verschiebungsunabhängig angenommen.
Grosse VerschiebungenWird die geometrische Form eines Tragwerkes stark verändert aber nicht die Form des
einzelnen Elementes, so spricht man von grossen Verschiebungen. Die Verzerrungen
bleiben in diesem Falle klein. Grosse Verschiebungen beeinflussen stark das Tragverhal-
ten der Struktur.
Grosse VerzerrungenWird die geometrische Form eines Elementes stark verändert, so spricht man von gros-
sen Verzerrungen. Es herrscht keine Linearität zwischen Verzerrungen und Verschie-
bungen mehr, somit sind die bekannten Spannungs - Verzerrungsbeziehungen nicht
mehr gültig. Diese Effekte sind sehr schwierig zu erfassen und zu erklären.
Nichtlineare Materialgesetzedienen zur Ermittlung des Spannungszustandes bei gegebenen Verzerrungen, wenn die
Elastizitätsgrenze des Werkstoffes überschritten wird. Das Materialverhalten beruht oft
auf den Grundprinzipien der Plastizitätstheorie, bei denen elastoplastische Spannungs -
Verzerrungsbeziehungen mit oder ohne Verfestigung zur Anwendung kommen. Setzt
man voraus, dass die Verzerrungen klein sind, so kann das nichtlineare Materialverhal-
ten unabhängig von den anderen nichtlinearen Effekten behandelt werden.
Kontaktproblemetreten auf, wenn es im Zuge der Laststeigerung zu einer Änderung in den kinematischen
Zwangsbedingungen kommt. Ein häufig vorkommender Fall ist das Abheben einer
Struktur aus seiner Lagerung. Solche Probleme werden meistens über eigens dafür ent-
wickelte Kontaktelemente behandelt. Dies sind Federelemente mit einer nichtlinearen
Charakterisitik.
Verschiebungsabhängige Lastentreten auf, wenn sich die Richtung und die Intensität der Belastung als Funktion der Tag-
werksverschiebungen einstellt. Ein Beispiel hierfür sind flüssigkeitsgefüllte Druckgefäs-
se, bei denen der Flüssigkeitsdruck immer senkrecht zur Tragwerksfläche wirkt. Die
Belastung ist somit eine Funktion der Verschiebungen bzw. der Orientierung von beste-
henden Oberflächen. Dieser Fall hat nur Bedeutung bei grossen Verschiebungen.
Alle erwähnten nichtlinearen Effekte können einzeln oder kombiniert auftreten und
werden in einer finiten Elementberechnung durch entsprechende Elementmodelle er-
fasst.
Im Rahmen dieser Arbeit werden nur materialbedingte Nichtlinearitäten aufgrund eines
nichtlinearen Materialgesetzes berücksichtigt, sowie eine Kombination dieser mit gros-
sen Verschiebungen bei kleinen Verzerrungen. Die Behandlung der grossen Verschie-
bungen erfolgt durch die Methode der korotierten Koordinaten (z.B. Crisfield[10]).
Methode der finiten Elemente
10
2.3 Knotenkräfte und tangentielleSteifigkeitsmatrizen
Ermittelt man die zu den Elementspannungen statisch äquivalenten Elementknoten-
kräfte , die vom - ten Element nach (2.8) zusammen mit den Knotenkräften an
seine Nachbarelemente übertragen werden, so ergeben sich diese im linearen Fall zu
(2.13)
Dabei stellt die verschiebungsunabhängige und konstante Elementsteifigkeitsmatrix
dar und den Lastvektor zufolge initialer Verzerrungen. Diese Knotenkräfte müssen
im nichtlinearen Fall unter Berücksichtigung geometrischer und/oder materialbeding-
ter Nichtlinearitäten für jede vorgegebene Elementkonfiguration direkt bestimmt wer-
den. Sind die virtuellen Elementverschiebungen aus (2.5) gegeben und errechnen sich
daraus die entsprechenden Verzerrungen mit
(2.14)
dann folgt aus der virtuellen Arbeitsgleichung mit (2.14)
(2.15)
für die Elementknotenkräfte die allgemeine Bestimmungsgleichung
(2.16)
Die Verzerrungs - Verschiebungsmatrix ist im Gegensatz zur Matrix (siehe (2.4))
nicht nur orts- sondern auch verschiebungsabhängig. Die Spannungen in (2.16) errech-
nen sich aus den momentanen effektiven Verzerrungen mit einem bestimmten
Materialgesetz. Will man den Einfluss grosser Elementverschiebungen berücksichtigen,
so müssen die Verzerrungen aus den entsprechenden nichtlinearen Verzerrungs - Ver-
schiebungsbeziehungen berechnet werden. Diese nichtlinearen Beziehungen verlangen
ein inkrementelles Vorgehen. Dazu entwickelt man die Knotenkräfte in die Taylorreihe
(2.17)
Es ergibt sich unter der strengen Erfüllung von Gleichgewicht für und
folgende inkrementelle Beziehung
(2.18)
Mit bezeichnet man die tangentielle Steifigkeitsmatrix des Elementes. Der Ausdruck
in (2.18) ist gleichbedeutend mit der inkrementellen Änderung der Knotenkräfte .
Unter der Verwendung von (2.16) lässt sich mit
σp e f b
p ka f0–=
kf 0
δε ε u δu+( ) ε u( )– B δa= =
δaT p δεTσ Vd∫=
p BT
σ VdV∫=
B B
ε ε0–
ε
p a da+( ) p a( ) ∂p a( )∂a
--------------da+=
p a( ) p a da+( )
dp p a da+( )= p a( )–∂p a( )
∂a--------------da kT da= =
kTdp
dp

Lastschrittalgorithmus
11
(2.19)
anschreiben. Das erste Glied zeigt den Einfluss der initialen Spannungen , die in der
betrachteten, unter Umständen stark verschobenen und rotierten Elementkonfiguration
vorhanden sind. In der gleichen Konfiguration werden durch das zweite Glied die ma-
terialbedingten Nichtlinearitäten erfasst. Für die infinitesimale Änderung der Spannun-
gen infolge des Verzerrungsinkrementes gilt die lineare inkrementelle Beziehung
(2.20)
Dabei bezeichnet die tangentielle Elastzitätsmatrix, welche für den betrachteten Ver-
zerrungszustand die gültigen Spannungs - Verzerrungsbeziehungen beschreibt. Im li-
nearen Fall gilt . Mit (2.20) kann für (2.19) noch geschrieben werden
(2.21)
Für das nichtlineare Materialmodell müssen die Spannungen und die Tangentenela-
stizitätsmatrix bei einem gegebenen Verzerrungsinkrement bzw. ausge-
wertet werden. Je nach Materialverhalten und Modellierungsverfahren kommen hier
verschiedene Verfahren zur Anwendung.
Aufgabe jedes Elementprogramms ist es, bei gegebenen Knotenverschiebungen die Kno-
tenkräfte und die tangentielle Steifigkeitsmatrix zu bestimmen (neben wird mei-
stens das Inkrement gegeben, sodass und für die Knotenverschiebungen
bestimmt werden). Zumeist werden die zu den verschiedenen Elementen gehö-
renden Programme zu einer Bibliothek zusammengefasst.
2.4 Lastschrittalgorithmus
Betrachtet man eine Verschiebung eines deformierbaren Körpers mit der Zeit als Zu-
standsvariable, so gilt für den Gleichgewichtszustand die Bedingung
(2.22)
Mit bezeichnet man die Resultierende der internen Knotenkräfte und mit die gege-
benen äusseren Knotenkräfte, die sich aus konzentrierten Knotenlasten und Element-
knotenlasten zusammensetzen. Von diesem bekannten Zustand kann auf den
Gleichgewichtszustand zum Zeitpunkt mit der zu erfüllenden Bedingung
(2.23)
geschlossen werden. ∆t entspricht dabei den inkrementellen Zuwachs der Zeit t. Diese
Strategie von einem bekannten Zustand aus auf den unbekannten Zustand zu schliessen
dp dBTσ V B
Tdσ V kT=d ad
V∫+d
V∫=
σ
dε
dσ DT dε DT B da= =
DTε
DT D=
dp BTσd V B
TDTB Vd ad
V∫+d
V∫=
σDT ε ε dε+
p kT ada p kT
a da+
t
P t( ) F t( )=
P F
tt ∆t+
P t t∆+( ) F t t∆+( )=

Methode der finiten Elemente
12
wird nun sooft wiederholt, bis der gesamte Verschiebungssablauf des Körpers bekannt
ist. Ausser bei Langzeitverformungen stellt die Zeit bei statischen Analysen einen Last-
parameter dar. Das Ablaufschema für den Lastschrittalgorithmus ist im Anhang A dar-
gestellt.
Steigert man ausgehend vom Gleichgewichtszustand zum Zeitpunkt mit
die äusseren Lasten auf das Lastniveau von bei unveränderten Knotenver-
schiebungen , so entstehen gleichgewichtsverletztende, d.h. nichtverschwindende
Residuallasten von der Grösse
(2.24)
Das Tragwerk wird dann mit diesen Residuallasten belastet, die den Charakter von
äusseren Lasten haben. Die aus den Residuallasten verursachten Knotenverschiebungen
werden aus der Lösung des globalen linearisierten Gleichungssystems
(2.25)
bestimmt, wobei die zu Beginn des Lastschrittes gültige tangentielle Steifigkeitsma-
trix des Systems darstellt. Die Verschiebungsinkremente können dann aus
(2.26)
bestimmt werden, wobei die inverse Matrix von darstellt. Die Residuallasten
(2.27)
für die mit geänderten Knotenverschiebungen werden dann berechnet. Bei
linearen Tragwerksverhalten wären die Residuallasten nun Null. Für die nächste Itera-
tion wird die zu den Knotenverschiebungen entsprechende tangentielle Steifig-
keitsmatrix bestimmt und die verbesserten Verschiebungsinkremente
(2.28)
wieder durch Belastung des Tragwerkes mit den Residualkräften , bzw. durch Lösung
des entsprechenden globalen Gleichungssystems bestimmt. Solche Gleichgewichtsitera-
tionen werden solange wiederholt, bis die Residuallasten klein genug sind. Trifft dies zu,
dann gilt das Gleichgewicht für als erreicht, und es wird zum nächsten Lastschritt
übergegangen.
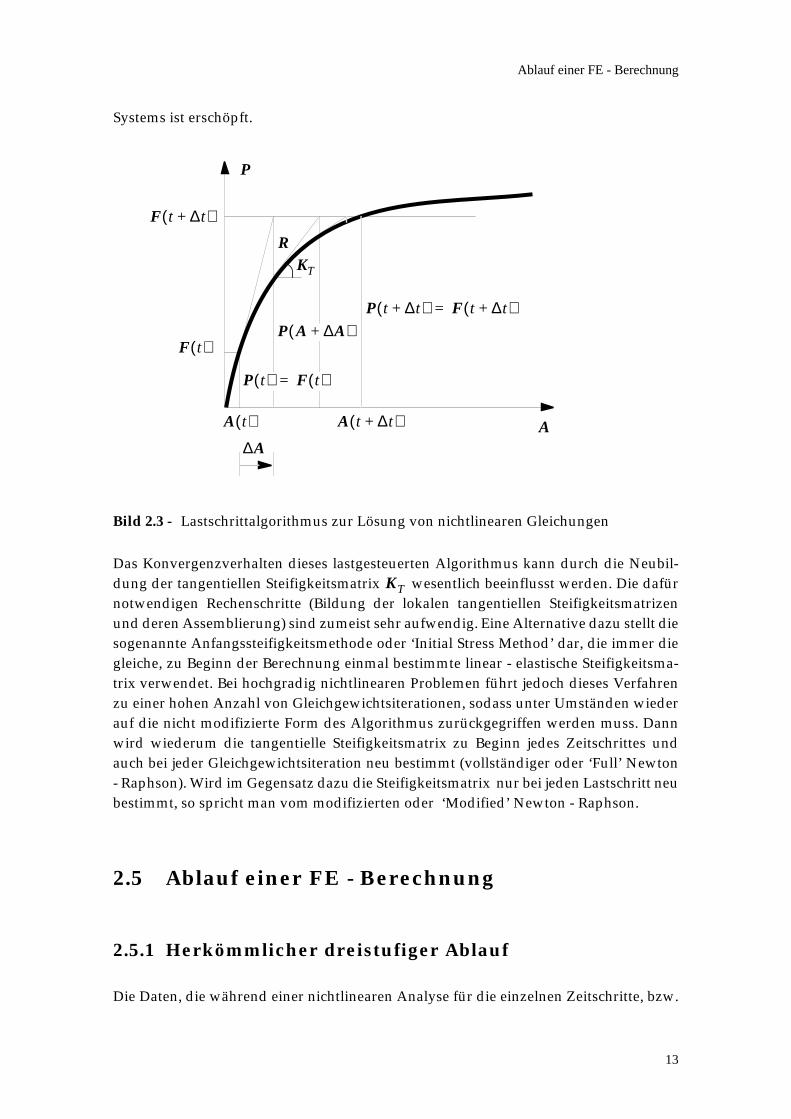
Bild 2.3 zeigt das ‘mehrdimensionale’ - Diagramm mit den Gleichgewichtsitera-
tionen innerhalb eines Lastschrittes. Betrachtet man die daraus resultierende Last -
Durchbiegungskurve, so ist ersichtlich, dass Konvergenz erreicht wird, solange die Last
- Durchbiegungskurve eine Steigung aufweist. Diese Steigung entspricht der tangentiel-
len Steifigkeitsmatrix , die regulär und damit invertierbar ist. Bei zunehmender Be-
lastung wird die Last - Durchbiegungskurve flacher und bei Erreichen der Taglast wird
die tangentielle Steifigkeitsmatrix singulär. Auch unendlich grosse Verschiebungsinkre-
mente können dann nicht mehr zu einem Gleichgewicht führen, die Lastaufnahme des
t
t P t( ) F t( )=F t ∆t+( )
A t( )
R F t ∆t+( ) P t( )–=
R
∆A
KT∆A R F t ∆t+( ) P t( )–= =
KT
∆A KT1– R KT
1– F t ∆t+( ) P t( )–( )= =
KT1– KT
R F t t∆+( ) P A ∆A+( )–=
∆A A ∆A+
A A∆+KT
A∆ A KT1– R+∆ A KT
1– F t t∆+( ) P A ∆A+( )–( )+∆= =
R
t ∆t+
P A( )
KT
Ablauf einer FE - Berechnung
13
Systems ist erschöpft.
Bild 2.3 - Lastschrittalgorithmus zur Lösung von nichtlinearen Gleichungen
Das Konvergenzverhalten dieses lastgesteuerten Algorithmus kann durch die Neubil-
dung der tangentiellen Steifigkeitsmatrix wesentlich beeinflusst werden. Die dafür
notwendigen Rechenschritte (Bildung der lokalen tangentiellen Steifigkeitsmatrizen
und deren Assemblierung) sind zumeist sehr aufwendig. Eine Alternative dazu stellt die
sogenannte Anfangssteifigkeitsmethode oder ‘Initial Stress Method’ dar, die immer die
gleiche, zu Beginn der Berechnung einmal bestimmte linear - elastische Steifigkeitsma-
trix verwendet. Bei hochgradig nichtlinearen Problemen führt jedoch dieses Verfahren
zu einer hohen Anzahl von Gleichgewichtsiterationen, sodass unter Umständen wieder
auf die nicht modifizierte Form des Algorithmus zurückgegriffen werden muss. Dann
wird wiederum die tangentielle Steifigkeitsmatrix zu Beginn jedes Zeitschrittes und
auch bei jeder Gleichgewichtsiteration neu bestimmt (vollständiger oder ‘Full’ Newton
- Raphson). Wird im Gegensatz dazu die Steifigkeitsmatrix nur bei jeden Lastschritt neu
bestimmt, so spricht man vom modifizierten oder ‘Modified’ Newton - Raphson.
2.5 Ablauf einer FE - Berechnung
2.5.1 Herkömmlicher dreistufiger Ablauf
Die Daten, die während einer nichtlinearen Analyse für die einzelnen Zeitschritte, bzw.
F t ∆t+( )
F t( )
A t( ) A t ∆t+( )
KT
A∆
P A ∆A+( )
R
P
A
P t( ) F t( )=
P t ∆t+( ) F t ∆t+( )=
KT
Methode der finiten Elemente
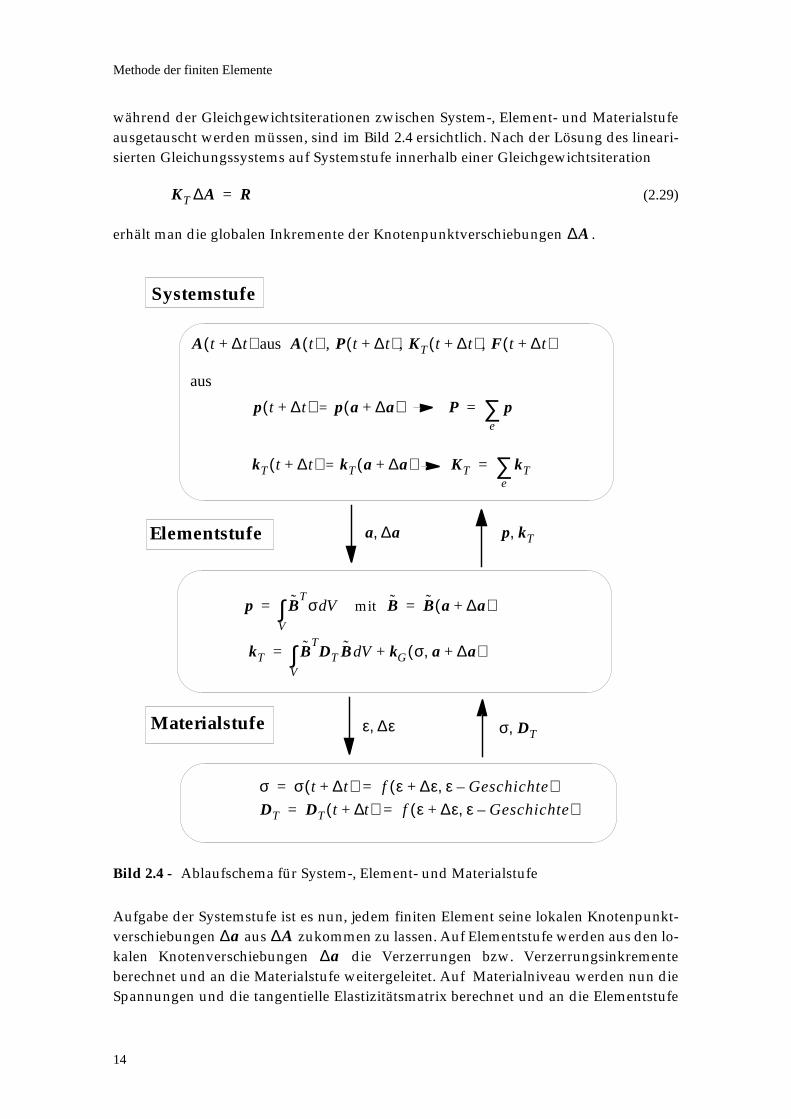
14
während der Gleichgewichtsiterationen zwischen System-, Element- und Materialstufe
ausgetauscht werden müssen, sind im Bild 2.4 ersichtlich. Nach der Lösung des lineari-
sierten Gleichungssystems auf Systemstufe innerhalb einer Gleichgewichtsiteration
(2.29)
erhält man die globalen Inkremente der Knotenpunktverschiebungen .
Bild 2.4 - Ablaufschema für System-, Element- und Materialstufe
Aufgabe der Systemstufe ist es nun, jedem finiten Element seine lokalen Knotenpunkt-
verschiebungen aus zukommen zu lassen. Auf Elementstufe werden aus den lo-
kalen Knotenverschiebungen die Verzerrungen bzw. Verzerrungsinkremente
berechnet und an die Materialstufe weitergeleitet. Auf Materialniveau werden nun die
Spannungen und die tangentielle Elastizitätsmatrix berechnet und an die Elementstufe
KT ∆A R=
∆A
aus , , ,
aus
=
=
A t ∆t+( ) A t( ) P t ∆t+( ) KT t ∆t+( ) F t ∆t+( )
p t ∆t+( ) p a ∆a+( ) P pe∑=
kT t ∆t+( ) kT a ∆a+( ) KT kTe∑=
mitp BT
σ VdV∫= B B a ∆a+( )=
kT BTDT B V kG σ a ∆a+,( )+d
V∫=
σ σ t ∆t+( ) f ε ∆ε+ ε Geschichte–,( )= =
DT DT t t∆+( ) f ε ∆ε+ ε Geschichte–,( )= =
Elementstufe
Materialstufe
a ∆a,
ε ∆ε,
p kT,
σ DT,
Systemstufe
∆a ∆A∆a

Ablauf einer FE - Berechnung
15
zurückgegeben. Diese wiederum berechnet die lokale tangentielle Steifigkeitsmatrix
und den zugehörigen internen Knotenkraftvektor, die dann beide an die Systemstufe
weitergeleitet werden. Nun startet der eigentliche Assemblierungsprozess. Die lokalen
Matrizen und Vektoren werden zu globale Stukturen zusammengefasst, der Residual-
vektor wird berechnet und je nach Grösse des Residuums wird wiederum das Glei-
chungssystem (2.29) gelöst, und der Prozess wiederholt sich von vorne. Liegt jedoch die
Grösse des Residuums innerhalb des Toleranzbereiches, so kann ein weiterer Lastschritt
aufgebracht werden.
2.5.2 Neues Ablaufschema
In der vorliegenden Arbeit wird eine neue Implementation für die nichtlineare Analyse
vorgelegt und gezeigt. Die herkömmlichen Programme arbeiten nach einem dreistufi-
gen Verfahren mit System-, Element- und Materialstufe (siehe 2.5.1). Im Gegensatz dazu
wird hier ein zweistufiges Verfahren gezeigt, bestehend aus System- und Elementstufe
(siehe Bild 2.5).
Bild 2.5 - Zweistufiges Ablaufschema
Dafür muss das Materialgesetz im Knotenkraft - Verschiebungsraum mit den linearisier-
ten Fliessbedingungen für das gesamte finite Element aufgestellt werden. Auf System-
stufe werden wieder die Daten für das finite Element, die Knotenverschiebungen ,
bzw. deren Inkremente bereitgestellt. Die Elementstufe ermittelt aus diesen bereit-
aus , , ,
aus
=
aus
=
A t ∆t+( ) A t( ) P t ∆t+( ) KT t ∆t+( ) F t ∆t+( )
p t ∆t+( ) p a ∆a+( ) P pe∑=
kT t ∆t+( ) kT a ∆a+( ) KT kTe∑=
p p t ∆t+( ) f a ∆a+ a Geschichte–,( )= =kT kT t t∆+( ) f a ∆a+ a Geschichte–,( )= =
Systemstufe
Elementstufe a ∆a, p kT,
a∆a

Methode der finiten Elemente
16
gestellten Daten die tangentielle Steifigkeitsmatrix und den internen Knotenkraft-
vektor und liefert diese zurück an die Systemstufe, wo sie zu globale Vektoren und
Matrizen assembliert werden. Danach wird der Residualvektor berechnet und je nach
Grösse des Residuums wird wiederum das Gleichungssystem (2.29) gelöst, und der Pro-
zess wiederholt sich von vorne. Liegt jedoch die Grösse des Residuums innerhalb des
Toleranzbereiches, so kann ein weiterer Lastschritt aufgebracht werden, bis die Traglast
erreicht wird. Durch die Definition des Elementgesetzes kommt es zu einer Einsparung
im Berechnungsablauf. Die genaue Beschreibung des in dieser Arbeit verwendeten ela-
stoplastischen Elementgesetzes erfolgt im Kapitel 5. Das Aufstellen der geometrischen
Steifigkeitsmatrix aus den Knotenkräften wird im Kapitel 3 gezeigt.
kTp

17
3 Elementmodelle
3.1 Grundlagen
Bei elastischen Materialien können Gleichgewichtsformulierungen nicht nur nach dem
Prinzip der virtuellen Verschiebungen, sondern auch nach dem Prinzip vom Minimum
des Gesamtpotentials aufgestellt werden (Bathe[6]). Beide Formulierungen führen
zum äquivalenten globalen Gleichungssytem zur Bestimmung der unbekannten Ver-
schiebungsgrössen. Das Gesamtpotential einer diskretisierten Struktur lässt sich aus
den Beiträgen der einzelnen finiten Elemente durch Aufsummation von
(3.1)
berechnen. stellt das Potential eines finiten Elementes dar, dass sich aus
(3.2)
berechnet. entspricht dabei der inneren Verzerrungsenergie eines Elementes und
ist die Arbeit der äusseren Knotenlasten , die statisch äquivalent zu den am Ele-
ment wirkenden Lasten sind. Bei linear elastischen Elementen errechnet sich zu
und (3.3)
Die lokale Steifigkeitsmatrix eines finiten Elementes ist symmetrisch ( ), sin-
gulär und positiv semidefinit, da die innere Verzerrungsenergie ist. Ein Koeffi-
zient der lokalen Elementsteifigkeitsmatrix stellt die - te Einspannkraft infolge einer
einheitlichen Knotenverschiebung dar.
Durch die Diskretisierung einer Struktur mittels finiter Elemente sollte mit zunehmen-
der Elementanzahl die Lösung zur exakten analytischen Lösung der Differentialglei-
chung des Problems konvergieren. Die Annäherung zur exakten Lösung kann entweder
monoton oder nicht monoton erfolgen. Für eine monotone Annäherung müssen die Ele-
mente vollständig und kompatibel sein. Ein Element wird als vollständig bezeichnet,
wenn man mit seinen Verschiebungsfunktionen Starrkörperverschiebungen und
konstante Verzerrungszustände erfassen kann. Starrkörperverschiebungen sind solche,
die das Element als starrer Körper ausführen kann, ohne dass dabei Spannungen entste-
hen. Folglich gilt für die Knotenkräfte
(3.4)
Π
Π
Π Πe Minimum→e∑=
Πe
Πe Ue We–=
UeWe f b
Ue
Ue12--- εTσ V
12--- aTk a=d
V∫= We aT f b=
k kij k ji=Ue 0≥
kij iaj 1=
aSK
p k aSK 0= =

Elementmodelle
18
Der Rang der Steifigkeitsmatrix entspricht der Matrixdimension (d.h. der Anzahl der
kinematischen Freiheitsgrade) vermindert um die Anzahl der unabhängigen Starrkör-
perverschiebungen (im dreidimensionalen Fall sechs: drei Verschiebungen und drei Ro-
tationen, im zweidimensionalen drei: zwei Verschiebungen und eine Rotation). Aus der
Beziehung (3.4) folgt, dass die Knotenkräfte für beliebige Knotenverschiebun-
gen untereinander im Gleichgewicht sind.
Löst man das Eigenwertproblem
(3.5)
mit als - tem Eigenwert und mit als zugehörigem Eigenvektor, so zeigen die Ei-
genwerte, wie steif ein Element in den entsprechenden Verschiebungsmoden ist. Aus
der Beziehung
(3.6)
lässt sich schliessen, ob Starrkörpermoden und welche zusätzlichen Verzerrungsmoden
vorhanden sind. bezeichnet die quadratische Matrix der Eigenvektoren und enthält
die zu den Eigenvektoren zugehörigen Eigenwerte mit . Bei Starrkör-
perverschiebungen und mit sind die zugehörigen Eigenwerte und
für die Eigenvektoren gilt . Da finite Element Berechnungen die Steifigkeit
stets überschätzen, ist ein Element umso ‘effektiver’, je kleiner die Eigenwerte sind (gilt
nur für kinematisch konforme und exakt integrierte finite Elemente). Wesentlich ist, dass
bei symmetrischen und positiv semidefiniten Matrizen die Eigenwerte stets reell und
grösser gleich Null sind.
Die Forderung nach Kompatibiltät bedeutet, dass die Verschiebungsansätze so gewählt
werden müssen, dass die für das jeweilige verwendete mechanische Modell gültigen ki-
nematischen Kontinuitätsbedingungen zwischen den Elementen nicht nur in den Kno-
ten sondern auch entlang der Elementränder erfüllt sind (‘kinematic conformity’). Trifft
dies nicht zu, dann wird eine nach der Herleitung des Prinzips der virtuellen Verschie-
bungen formulierte Voraussetzung verletzt. Physikalisch gesehen bedeutet dies, dass
sich zwischen den Elementen Spalten und Klüfte auftun und Materialüberlappungen
entstehen können.
Auf der Suche nach verbesserten Modellbeschreibungen für die Eigenschaften der fini-
ten Elemente entwickelte man inkompatible Elemente. Sie erzwingen durch die Einfüh-
rung eines kinematischen Fehlers eine ‘Erweichung’ im Systemverhalten, da ja die
Gleichgewichtsfehler eine versteifende Wirkung herbeiführen. Auf diese Art und Weise
versucht man eine Kompensation herbeizuführen. Als kinematisch inkompatibel wer-
den Elemente bezeichnet, deren Kontinuitätsbedingungen zwischen den Elementen ver-
letzt sind: Die Verschiebungen zwischen den Elementen verlaufen nicht mehr
kontinuierlich. Es hat sich gezeigt, dass sich dabei das Konvergenzverhalten verbessern
lässt, wenn man von mathematisch korrekten Formulierungen abweicht (inkompatible
Elemente, reduzierte oder selektive Integration). Mit dem Verlust der Kompatibilitätsbe-
dingung muss auch die Forderung nach monotoner Konvergenz fallengelassen werden.
k
p ka=a
k λi I–( )φi 0=
λi i φi
φTkφ Λ=
φ ΛΛ diag λi( )= q
i 1…q= λi 0=φi aSKi=

Grundlagen
19
Wenn schon das Ziel für monotone Konvergenz aufgegeben werden muss, sollte man
Bedingungen stellen, die zumindest eine nichtmonotone Konvergenz sichern. Die Voll-
ständigkeitsbedingung muss ja immer erfüllt sein. Mit der Verfeinerung des finiten Ele-
ment Netzes soll und muss sich jedes Element einem konstanten Verzerrungszustand
nähern. Für inkompatible Elemente muss diese Bedingung nicht im einzelnen, sondern
für eine Gruppierung von Elementen erfüllt sein.
Bild 3.1 - Der Patch - Test
Zur Abklärung der Vollständigkeitsfrage wird der auf eine Gruppierung (‘Patch’) von
Elementen angewendete Patchtest von Irons [16] vorgeschlagen (Bild 3.1). Bei diesem
Test wird eine Gruppe von unregelmässigen, mit gleichen Materialeigenschaften ausge-
statteten Elementen zu einem ‘Patch’ zusammengefasst. Auf dieses rundum voll einge-
spannte Elementmodell wirken keine äusseren Lasten. Zwingt man nun den äusseren,
nichtfreien Knoten als kinematische Randbedingung Verschiebungen auf, die überall ei-
nem Zustand konstanter Verzerrung entsprechen, dann müssen sich aus der Lösung des
Gleichungssystems für die inneren freien Knoten Verschiebungen ergeben, die diesem
konstanten Verzerrungszustand entsprechen. Wird diese Forderung erfüllt, so wird ga-
rantiert, dass bei einer Verfeinerung der Elementmasche, selbst bei kinematisch nicht
verträglichen Elementmodellen Konvergenz eintritt.
Ein Beispiel für inkompatible Elemente sind die in dieser Arbeit verwendeten Free For-
mulation Elemente (Bergan [7]). Die Knotenfreiheitsgrade, Knotenkräfte und die gene-
ralisierten Spannungen sind bei einem Membranelement gegeben durch
(3.7)
und für ein Platten- (bzw. Biege-)element durch
Nicht freier Knotenaber mit auf-gezwungenen Ver-schiebungen
volleingespannterRand
freier Knoten
x
y
am
u
v
θz
= pm
px
py
mz
= σm
nx
ny
nxy
=
Elementmodelle
20
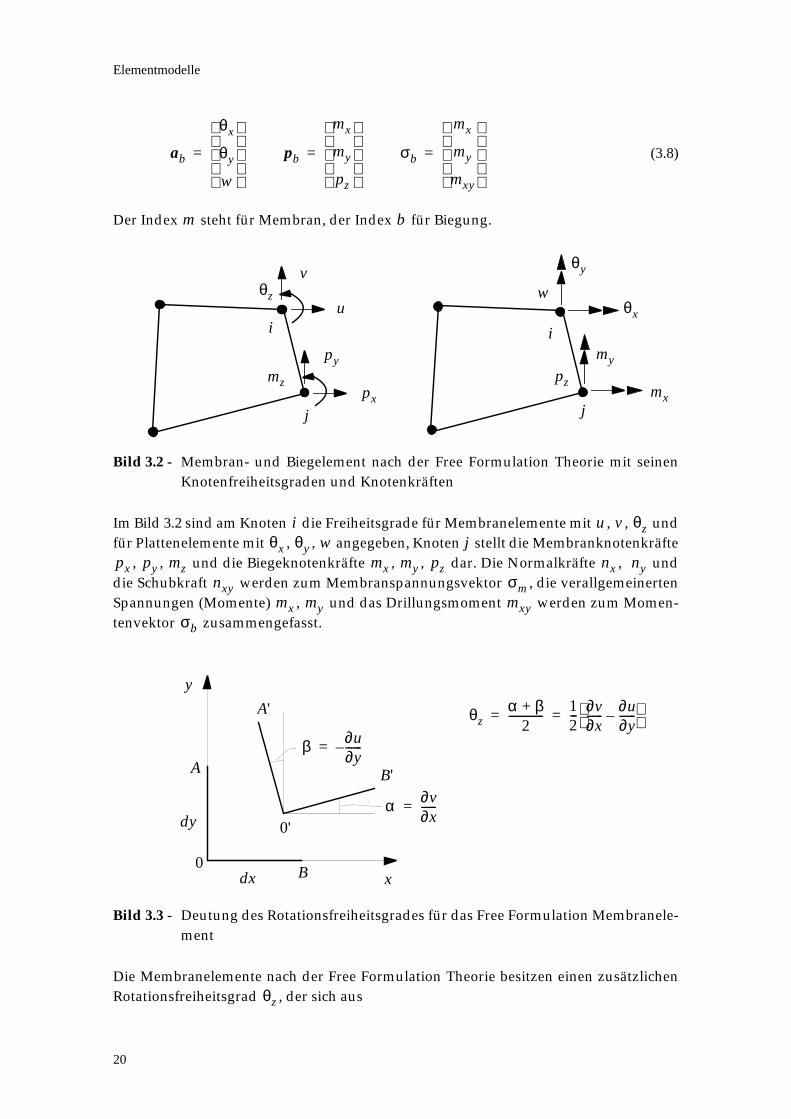
(3.8)
Der Index steht für Membran, der Index für Biegung.
Bild 3.2 - Membran- und Biegelement nach der Free Formulation Theorie mit seinen
Knotenfreiheitsgraden und Knotenkräften
Im Bild 3.2 sind am Knoten die Freiheitsgrade für Membranelemente mit , , und
für Plattenelemente mit , , angegeben, Knoten stellt die Membranknotenkräfte
, , und die Biegeknotenkräfte , , dar. Die Normalkräfte , und
die Schubkraft werden zum Membranspannungsvektor , die verallgemeinerten
Spannungen (Momente) , und das Drillungsmoment werden zum Momen-
tenvektor zusammengefasst.
Bild 3.3 - Deutung des Rotationsfreiheitsgrades für das Free Formulation Membranele-
ment
Die Membranelemente nach der Free Formulation Theorie besitzen einen zusätzlichen
Rotationsfreiheitsgrad , der sich aus
ab
θx
θy
w
= pb
mx
my
pz
= σb
mx
my
mxy
=
m b
u
vθz
px
py
mz
wθx
θy
mx
my
pz
i i
j j
i u v θzθx θy w j
px py mz mx my pz nx nynxy σm
mx my mxyσb
A
0B
α ∂v∂x------=
β ∂u∂y------–=
θzα β+
2-------------
12--- ∂v
∂x------ ∂u
∂y------–
= =
0'
B'
A'
x
y
dx
dy
θz
Lineare Modelle für Platten- und Schalenelemente
21
mit und (3.9)
berechnet. Die auch als ‘fiktiv’ bezeichnete Rotation wird als Mittelwert der Rotatio-
nen der Seiten 0A und 0B zu 0’A’ und 0’B’ eines differentiellen - Elementes inter-
pretiert (Bild 3.3). Dieser Rotationsfreiheitsgrad ist in bezug auf die Wahl des
kartesischen , - Koordinatensystems invariant.
3.2 Lineare Modelle für Platten- undSchalenelemente
Aus den jeweiligen linearen Verzerrungstensoren für Platten- und ebene Schalenele-
mente soll unter Einbezug der entsprechenden Spannungs - Verzerrungsbeziehungen
die Bildung der lokalen Steifigkeitsmatrizen gezeigt werden (Anderheggen [2], Zien-
kiewicz [30]).
3.2.1 Plattenelemente
Platten sind ebene Flächentragwerke, die je nach Plattentheorie ausschliesslich senkrecht
zur Mittelfläche belastet sind und die eine bzw. beide Hypothesen nach Bernoulli erfül-
len. Diese beiden Hypothesen besagen
I) Die Punkte einer Normalen zur Plattenmittelfläche liegen auch nach der Verfor-
mung auf einer Geraden.
II) Die Normale zur Plattenmittelfläche bleibt auch nach der Verformung wiederum
normal zur Plattenmittelfläche.
Bei der Plattentheorie nach Reissner wird nur die erste Hypothese nach Bernoulli erfüllt.
Die Schubverformung wird dabei mit = const. über die Plattendicke näherungsweise
erfasst. Näherungsweise deshalb, weil die Schubspannungen nicht konstant, sondern
aus Gleichgewichtsgründen parabelförmig über die Plattendicke verlaufen müssen. Be-
trachtet man nun die verformte Lage eines Plattenpunktes , so lässt sich diese durch
die beiden Rotationen , und durch die Transversalverschiebung beschreiben.
Es gilt die Voraussetzung, dass die Plattenmittelebene mit den Verschiebungen in der
Plattenebene eine Antimetrieebene darstellt. Bild 3.4 zeigt die
verformte Mittelfläche eines Plattenelementes sowie die Freiheitsgrade eines Platten-
punktes , die zusammen die Verschiebungskomponenten des Vektors
θz12--- α β+( )= α ∂v
∂x------= β ∂u
∂y------–=
θz
dx dyθz
x y
γτ
Pθx θy w
u x y 0, ,( ) v x y 0, ,( ) 0==
P
Elementmodelle
22
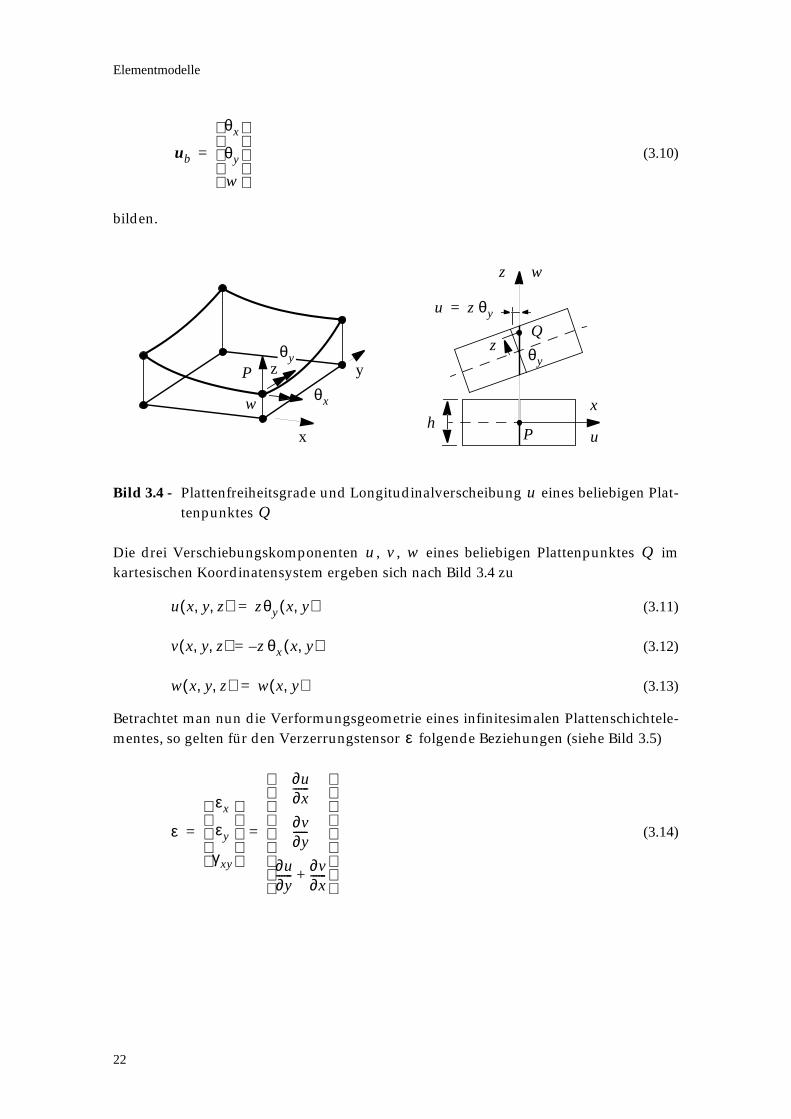
(3.10)
bilden.
Bild 3.4 - Plattenfreiheitsgrade und Longitudinalverscheibung eines beliebigen Plat-
tenpunktes
Die drei Verschiebungskomponenten , , eines beliebigen Plattenpunktes im
kartesischen Koordinatensystem ergeben sich nach Bild 3.4 zu
(3.11)
(3.12)
(3.13)
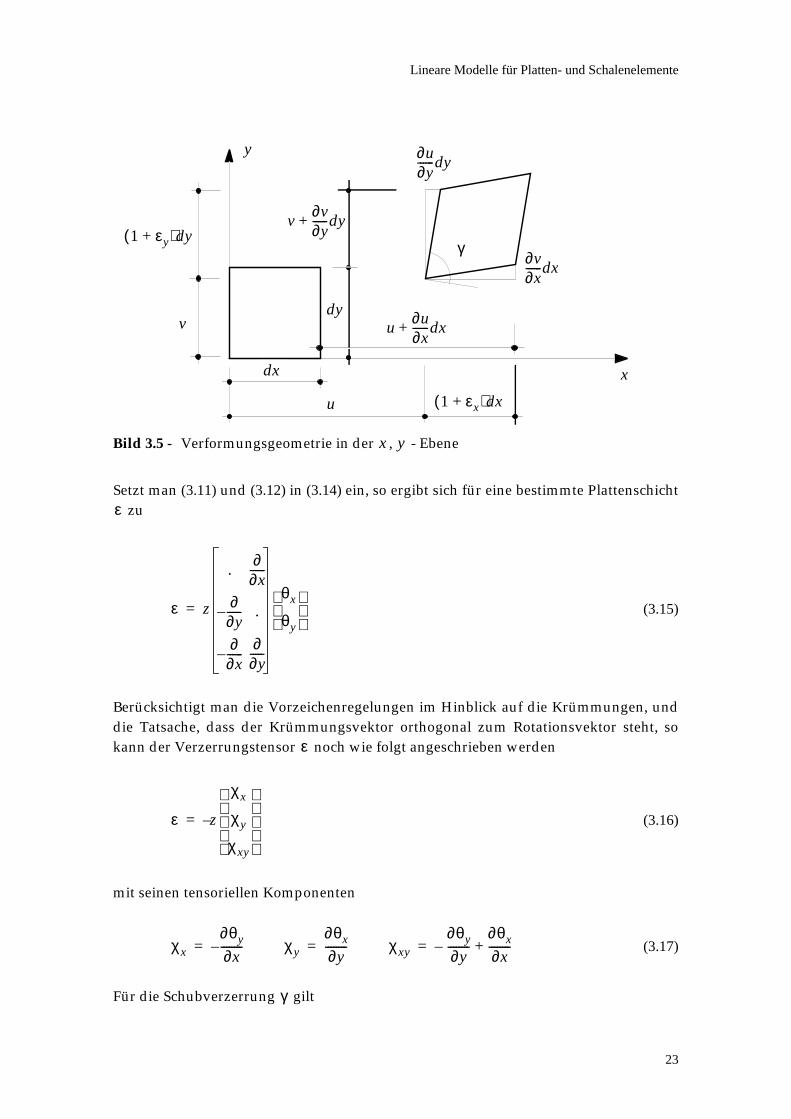
Betrachtet man nun die Verformungsgeometrie eines infinitesimalen Plattenschichtele-
mentes, so gelten für den Verzerrungstensor folgende Beziehungen (siehe Bild 3.5)
(3.14)
ub
θx
θy
w
=
θy
x
yz
wθx
θyP
u zθy=
z
h
Q
x
z
P u
w
uQ
u v w Q
u x y z, ,( ) zθy x y,( )=
v x y z, ,( ) z– θx x y,( )=
w x y z, ,( ) w x y,( )=
ε
ε
εx
εy
γ xy
∂u∂x------
∂v∂y-----
∂u∂y------ ∂v
∂x------+
= =
Lineare Modelle für Platten- und Schalenelemente
23
Bild 3.5 - Verformungsgeometrie in der , - Ebene
Setzt man (3.11) und (3.12) in (3.14) ein, so ergibt sich für eine bestimmte Plattenschicht
zu
(3.15)
Berücksichtigt man die Vorzeichenregelungen im Hinblick auf die Krümmungen, und
die Tatsache, dass der Krümmungsvektor orthogonal zum Rotationsvektor steht, so
kann der Verzerrungstensor noch wie folgt angeschrieben werden
(3.16)
mit seinen tensoriellen Komponenten
(3.17)
Für die Schubverzerrung gilt
u∂u∂x------dx+
y
xdx
dy
u 1 εx+( )dx
v∂v∂y-----dy+
v
1 εy+( )dy
∂v∂x------dx
∂u∂y------dy
γ
x y
ε
ε z
.∂
∂x------
∂∂y-----– .
∂∂x------–
∂∂y-----
θx
θy
=
ε
ε z–
χx
χy
χxy
=
χx
∂θy
∂x--------–= χy
∂θx
∂y--------= χxy
∂θy
∂y--------–
∂θx
∂x--------+=
γ

Elementmodelle
24
(3.18)
Definiert man den Verzerrungstensor für Platten aus den Krümmungen , und
der Drillung sowie aus den über die Dicke konstant verlaufenden Schiebungen
und , so ergibt sich dieser zu
(3.19)
mit als die lineare 5x3 Operatormatrix. Den 5 Verzerrungskomponenten entsprechen
die 5 Komponenten des Spannungsvektors mit
(3.20)
der sich aus den beiden Biegemomenten und (arbeitsassoziiert mit den Krüm-
mungen und ) und dem Drillungsmoment (arbeitsassoziiert mit der Drillung
) zusammensetzt, die sich aus
(3.21)
definieren, sowie aus den in z - Richtung wirkenden Querkräften und (arbeitsas-
soziiert mit den Schiebungen und ), die sich wiederum aus
γγ xz
γ yz
∂u∂z------ ∂w
∂x-------–
∂v∂z----- ∂w
∂y-------–
θ– y
θx
=
∂∂x------
∂∂y-----
– w. 1– ∂
∂x------–
1 . ∂∂y-----–
θx
θy
w
== =
εb χx χyχxy γ xz
γ yz
εb
χx
χy
χxy
γ xz
γ yz
. ∂∂x------– .
∂∂y----- . .
∂∂x------ ∂
∂y-----– .
. 1– ∂∂x------–
1 . ∂∂y-----–
θx
θy
w
Lbub== =
Lbσb
σb
mx
my
mxy
qx
qy
=
mx myχx χy mxy
χxy
mx σx z zd
h 2⁄–
h 2⁄
∫= my σy z zd
h 2⁄–
h 2⁄
∫= mxy τxy z zd
h 2⁄–
h 2⁄
∫=
qx qyγ xz γ yz
Lineare Modelle für Platten- und Schalenelemente
25
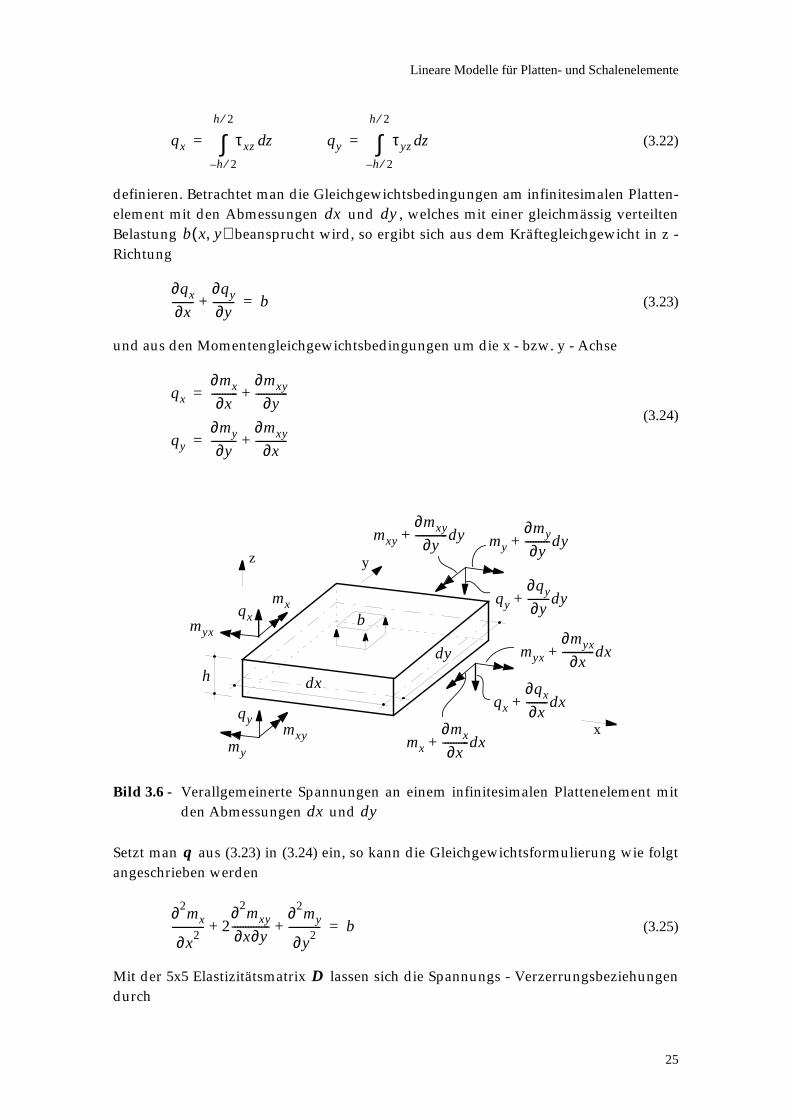
(3.22)
definieren. Betrachtet man die Gleichgewichtsbedingungen am infinitesimalen Platten-
element mit den Abmessungen und , welches mit einer gleichmässig verteilten
Belastung beansprucht wird, so ergibt sich aus dem Kräftegleichgewicht in z -
Richtung
(3.23)
und aus den Momentengleichgewichtsbedingungen um die x - bzw. y - Achse
(3.24)
Bild 3.6 - Verallgemeinerte Spannungen an einem infinitesimalen Plattenelement mit
den Abmessungen und
Setzt man aus (3.23) in (3.24) ein, so kann die Gleichgewichtsformulierung wie folgt
angeschrieben werden
(3.25)
Mit der 5x5 Elastizitätsmatrix lassen sich die Spannungs - Verzerrungsbeziehungen
durch
qx τxz zd
h 2⁄–
h 2⁄
∫= qy τyz zd
h 2⁄–
h 2⁄
∫=
dx dyb x y,( )
∂qx
∂x--------
∂qy
∂y--------+ b=
qx
∂mx
∂x----------
∂mxy
∂y------------+=
qy
∂my
∂y---------
∂mxy
∂x------------+=
qy
∂qy
∂y--------dy+
mx
∂mx
∂x----------dx+
qx
∂qx
∂x--------dx+
my
∂my
∂y---------dy+mxy
∂mxy
∂y------------dy+
x
yz
mxymy
qy
myx
h
myx
∂myx
∂x------------dx+
bmxqx
dx
dy
dx dy
q
∂2mx
∂x2
------------ 2∂2
mxy
∂x∂y--------------
∂2my
∂y2
------------+ + b=
D

Elementmodelle
26
(3.26)
ausdrücken, wobei der Index b die Biegebeanspruchung und der Index q die Schubbe-
anspruchung anzeigt. Mit bezeichnet man den Einfluss der initialen Verzerrungen,
bzw. mit den Einfluss der initialen Krümmungen und mit den Einfluss der initia-
len Schiebungen. Aus (3.26) lässt sich zeigen, dass die Krümmungen keine Querkräfte
und die Schiebungen keine Momente verursachen. Die Momenten - Krümmungsmatrix
und die Querkraft - Schiebungsmatrix sind dabei vollständig entkoppelt. Für
und gilt
(3.27)
Die Koeffizienten der Momenten - Krümmungs - Matrix bis werden aus der In-
tegration über die Plattendicke bestimmt unter der Annahme, dass in jeder Lamelle
mit der Dicke ein ebener Spannungszustand vorliegt (Anderheggen [2]). Im isotro-
pen Fall gilt
(3.28)
und für die Koeffizienten der Querkraft - Schiebungsmatrix gilt
mit (3.29)
Dabei bezeichnet den Elastizitätsmodul, den Schubmodul und die Querdeh-
nungszahl.
Für den Sonderfall der Plattentheorie nach Kirchhoff, die beide Bernoulli - Hypothesen
streng erfüllt, sind die Rotationen und keine unabhängigen Grössen mehr. Sie er-
rechnen sich aus den Ableitungen der Plattendurchbiegung nach bzw.
(3.30)
Dabei verschwinden die Schiebungen und , d.h. die Schubverformungen werden
unterdrückt. Dies bedeutet, dass die Schubsteifigkeit gegenüber der Plattensteifigkeit
unendlich gross ist, was ausser bei sehr dicken Platten auch weitgehend zutrifft. Der
Verzerrungstensor reduziert sich auf drei Komponenten, die sich nun direkt über die
Plattendurchbiegung ausdrücken lassen mit
σσb
σq Db .
. Dq
εb
γ εb0
γ0
–
D ε ε0–( )= = =
ε0εb0 γ0
Db DqDb Dq
Db
d11 d12 .
d21 d22 .
. . d33
= Dqd44 .
. d55
=
d11 d33h
dz
d11 d22Eh
3
12 1 ν2–( )
-------------------------= = d12 d21 ν d11= = d33Gh
3
12----------=
d44 d55 Gh= = GE
2 1 ν+( )--------------------=
E G ν
θx θyw x y
θx∂w∂y-------= θy
∂w∂x-------–=
γ xz γ yz
εbw ub w =

Lineare Modelle für Platten- und Schalenelemente
27
mit (3.31)
ist hier die lineare 3x1 Operatormatrix. Den 3 Verzerrungskomponenten entsprechen
die 3 Komponenten des Spannungsvektors mit
(3.32)
Die Querkräfte und lassen sich nicht mehr aus den Schiebungen und be-
rechnen, da ja diese im Zuge der Kirchoffschen Plattentheorie zu Null werden. Ebenso
lässt sich die Gleichgewichtsbedingung in (3.24) nicht mehr erfüllen (wohl aber die
Gleichgewichtsbedingung in (3.25)). Die Querkräfte können aus den Gleichgewichtsbe-
dingungen (3.24) berechnet werden.
Wählt man bei der Diskretisierung nach der Methode der finiten Elemente für einen
Verschiebungsansatz nach (2.3) in der Form
(3.33)
wobei als Knotenverschiebungsvektor und als Matrix der Ansatzfunktionen be-
zeichnet wird (bzw. die Verschiebungs - Interpolationsmatrix), so erhält man daraus die
Standardgleichung
(3.34)
(ohne Berücksichtigung des Lastvektors , der sich aus den vorgeschriebenen initialen
Verzerrungen im Element ergibt). Gleichung (3.34) kann noch in der Form (siehe auch
(2.11))
(3.35)
dargestellt werden. Der Spannungsvektor ist durch
(3.36)
und die Verzerrungs - Verschiebungsbeziehung ist durch
(3.37)
definiert.
εb
χx
χy
χxy
∂2
∂x2
--------
∂2
∂y2
--------
2∂2
∂x∂y------------
w Lbub= = = Lb
∂2
∂x2
--------
∂2
∂y2
--------
2∂2
∂x∂y------------
=
Lb
σb
mx
my
mxy
=
qx qy γ xz γ yz
ub
ub Hbab=
ab Hb
kbab pb=
f 0ε0
kbab BbT DbBb Vd∫( )ab Bb
Tσb V pb=d∫==
σ DbBbab=
Bb LbHb=

Elementmodelle
28
Bei der Kirchhoffschen Plattentheorie muss die Kontinuität nicht nur für die einzige Ver-
schiebungskomponente gewährleistet sein, sondern auch für ihre Ableitungen in Sei-
tenquerrichtung. Daher müssen die Ansatzfunktionen - Kontinuität erfüllen. Im
Gegensatz dazu müssen Plattenelemente nach der Reissner Theorie nur - kontinuier-
lich sein, da die 3 Verschiebungskomponenten , und voneinander unabhängig
sind. Der Versuch kinematisch voll verträgliche ‘konforme’ Plattenelemente nach der
klassischen Kirchhoffschen Plattentheorie zu entwickeln, erwies sich als schwierig, so-
dass man die nicht konformen Elementmodelle entwickelte. Diese die Kinematik verlet-
zenden Elementmodelle erfüllen die Kirchhoffsche Plattentheorie zwar flächendeckend,
jedoch nicht an den Elementrändern. Zu dieser Gruppierung von Elementen gehören
auch die Free Formulation Elemente, die aufgrund bestimmter auferlegter Orthogonali-
tätsbedingungen für die Verschiebungsansätze das Bestehen des Patchtests garantieren
und damit die Konvergenz sichern.
3.2.2 Schalenelemente
Bei ebenen Schalenelementen ist die Biege- und Membranwirkung im elastischen Aus-
gangszustand entkoppelt. Zunächst wird hier die Bildung der lokalen Steifigkeitsmatrix
für den ebenen Spannungszustand bei Scheibenelementen gezeigt. Am Ende des Ab-
schnittes wird schliesslich erläutert, wie sich die Steifigkeitsmatrix für ein Schalenele-
ment aufbaut.
Charakteristisch für Scheiben ist, dass sie in ihrer Ebene beansprucht werden, und dass
ihre Mittelfläche bei einer Formänderung eben bleibt. Eine in der - Ebene definierte
Scheibe mit Dicke h kann sich in z - Richtung frei ausdehnen - es liegt ein sogenannter
ebener Spannungszustand vor. Da die Scheibenoberfläche frei von äusseren Kräften ist,
gilt: . Die zur Mittelfläche parallelen Schnitte sind somit span-
nungsfrei. Die verformte Lage eines Scheibenpunktes lässt sich durch die Verschiebun-
gen und in der - Ebene beschreiben (analoge Beziehungen wie im Bild 3.5 bei
den Plattenelementen).
Aus (3.14) ergibt sich der Verzerrungstensor für ein Membranelement zu
(3.38)
stellt die für Scheiben gültige 3x2 Operatormatrix, den Verschiebungsvektor dar.
Das Kräftegleichgewicht für ein differentielles Scheibenelement mit den Tangentialbela-
stungen , wird ausgedrückt durch
wC1
C0w θx θy
x y,
σz τxz τyz 0= = =
u v x y,
εm
∂∂x------ .
.∂
∂y-----
∂∂y----- ∂
∂x------
u
v
L um m==
Lm um
bx by
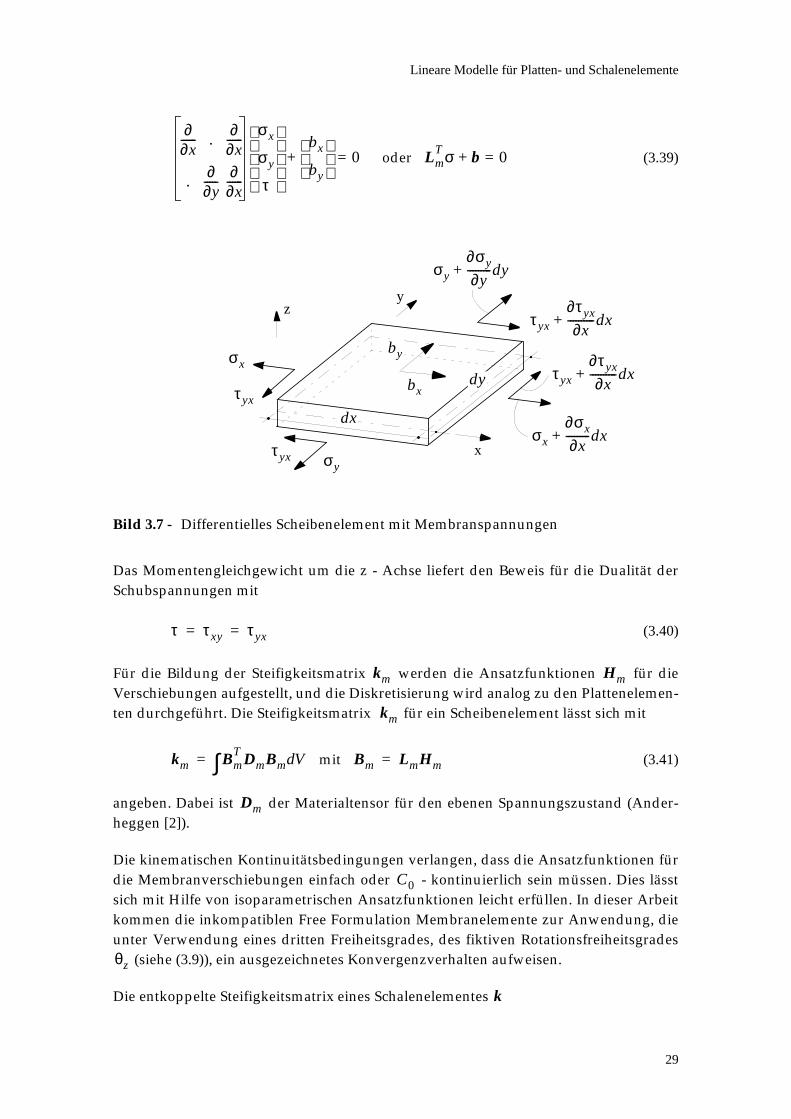
Lineare Modelle für Platten- und Schalenelemente
29
oder (3.39)
Bild 3.7 - Differentielles Scheibenelement mit Membranspannungen
Das Momentengleichgewicht um die z - Achse liefert den Beweis für die Dualität der
Schubspannungen mit
(3.40)
Für die Bildung der Steifigkeitsmatrix werden die Ansatzfunktionen für die
Verschiebungen aufgestellt, und die Diskretisierung wird analog zu den Plattenelemen-
ten durchgeführt. Die Steifigkeitsmatrix für ein Scheibenelement lässt sich mit
mit (3.41)
angeben. Dabei ist der Materialtensor für den ebenen Spannungszustand (Ander-
heggen [2]).
Die kinematischen Kontinuitätsbedingungen verlangen, dass die Ansatzfunktionen für
die Membranverschiebungen einfach oder - kontinuierlich sein müssen. Dies lässt
sich mit Hilfe von isoparametrischen Ansatzfunktionen leicht erfüllen. In dieser Arbeit
kommen die inkompatiblen Free Formulation Membranelemente zur Anwendung, die
unter Verwendung eines dritten Freiheitsgrades, des fiktiven Rotationsfreiheitsgrades
(siehe (3.9)), ein ausgezeichnetes Konvergenzverhalten aufweisen.
Die entkoppelte Steifigkeitsmatrix eines Schalenelementes
∂∂x------ .
∂∂x------
.∂
∂y----- ∂
∂x------
σx
σy
τ
bx
by
0=+ LmT σ b 0=+
x
yz
σx
∂σx
∂x---------dx+
τyx
∂τyx
∂x----------dx+
τyx
∂τyx
∂x----------dx+
σy
∂σy
∂y---------dy+
σyτyx
τyx
σx
bx
by
dx
dy
τ τxy τyx= =
km Hm
km
km BmT DmBm Vd∫= Bm LmHm=
Dm
C0
θz
k
Elementmodelle
30
(3.42)
setzt sich aus der Plattensteifigkeitsmatrix und der für den ebenen Spannungszu-
stand zusammen. Stellt die Elementmittelebene eine Symmetrieebene dar, so ist die
Plattenwirkung von der Membranwirkung vollständig entkoppelt. Da die Anzahl der
Knotenfreiheitsgrade eines Schalenelementes bei der Verwendung von Free Formulati-
on Elementen sechs ist (drei aus der Plattenwirkung, drei aus der Membranwirkung), er-
gibt sich bei Rechteckelementen eine lokale Steifigkeitsmatrix von bzw. bei
Dreieckelementen von Koeffizienten.
3.3 Verzerrungen und Spannungen bei grossenVerschiebungen
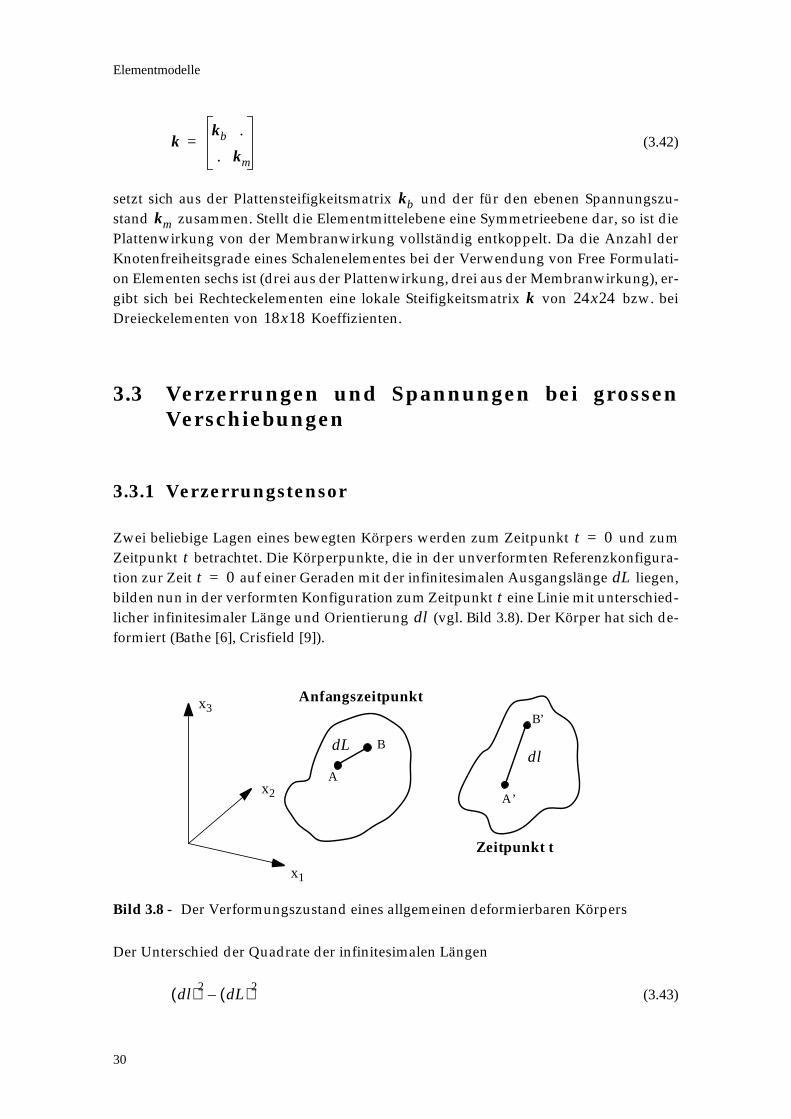
3.3.1 Verzerrungstensor
Zwei beliebige Lagen eines bewegten Körpers werden zum Zeitpunkt und zum
Zeitpunkt betrachtet. Die Körperpunkte, die in der unverformten Referenzkonfigura-
tion zur Zeit auf einer Geraden mit der infinitesimalen Ausgangslänge liegen,
bilden nun in der verformten Konfiguration zum Zeitpunkt eine Linie mit unterschied-
licher infinitesimaler Länge und Orientierung (vgl. Bild 3.8). Der Körper hat sich de-
formiert (Bathe [6], Crisfield [9]).
Bild 3.8 - Der Verformungszustand eines allgemeinen deformierbaren Körpers
Der Unterschied der Quadrate der infinitesimalen Längen
(3.43)
kkb .
. km
=
kbkm
k 24x2418x18
t 0=t
t 0= dLt
dl
x1
x2
x3
A
B
A’
B’
Anfangszeitpunkt
Zeitpunkt t
dLdl
dl( )2dL( )2
–

Verzerrungen und Spannungen bei grossen Verschiebungen
31
stellt ein Mass für die Deformation dar. Die Koordinaten eines beliebigen Körperpunktes
zum Zeitpunkt seien mit gegeben, die in seiner Anfangslage mit . Bezeichnet man
den Verschiebungsvektor zum Zeitpunkt mit so ergibt sich für die Koordinaten ei-
nes Körperpunktes zum Zeitpunkt
(3.44)
Die infinitesimale Änderung der Umgebung des Körperpunktes zufolge der Verschie-
bung ergibt sich zu
(3.45)
resp. in Komponentenschreibweise
(3.46)
Mit als Deformationsgradient und mit
(3.47)
als Verschiebungsgradient. Der Deformationsgradient lässt sich in das Produkt
(3.48)
aufspalten. Dabei stellt eine orthonormale Rotationsmatrix mit und eine
symmetrische Streckmatrix dar. Wird ein Körper ohne Formänderung rotiert, so ändert
t x Xt u
t
x X u+=
u
dx∂x∂X------- dX
∂ x u+( )∂X
---------------------dX FdX===
dx FdX
∂x1
∂X1---------
∂x1
∂X2---------
∂x1
∂X3---------
∂x2
∂X1---------
∂x2
∂X2---------
∂x2
∂X3---------
∂x3
∂X1---------
∂x3
∂X2---------
∂x3
∂X3---------
dX1
dX2
dX3
==
1 ∂u∂X1---------+
∂u∂X2--------- ∂u
∂X3---------
∂v∂X1--------- 1 ∂v
∂X2---------+
∂v∂X3---------
∂w∂X1--------- ∂w
∂X2--------- 1 ∂w
∂X3---------+
dX1
dX2
dX3
I D+[ ]dX==
F
D
∂u∂X1--------- ∂u
∂X2--------- ∂u
∂X3---------
∂v∂X1--------- ∂v
∂X2--------- ∂v
∂X3---------
∂w∂X1--------- ∂w
∂X2--------- ∂w
∂X3---------
u1 1, u1 2, u1 3,
u2 1, u2 2, u2 3,
u3 1, u3 2, u3 3,
ui j,∂u∂X-------= = = =
F
F RU=
R RTR I= U

Elementmodelle
32
sich lediglich die Rotationsmatrix. Die Streckmatrix wird zur Einheitsmatrix.
Aus Formel (3.43) ergibt sich mit und
(3.49)
Setzt man (3.46) in (3.49) ein, so ergibt sich das Verzerrungsmass bezogen auf die Ur-
sprungskonfiguration zu
(3.50)
wobei der Faktor 2 historisch bedingt ist. Der vollständige Green - Lagrangesche Verzer-
rungstensor nimmt nun die folgende Gestalt an
(3.51)
Der erste Term der rechten Seite von (3.51) ist eine lineare Funktion der Verschiebungs-
ableitungen und wird deshalb als linearer Verzerrungstensor oder oft auch auch als ‘En-
gineering Strains’ bezeichnet. Der zweite Term stellt den nichtlinearen Anteil des
vollständigen Green - Lagrangeschen Verzerrungstensors dar. Ausgedrückt in den Ver-
schiebungen lässt sich der Green - Lagrangesche Verzerrungstensor wie folgt angeben
(3.52)
mit
(3.53)
als dem linearen Anteil (‘Engineering Strains’) und mit
(3.54)
als dem nichtlinearen Anteil des Green - Lagrangeschen Verzerrungstensors. Die Haupt-
eigenschaft des Green - Lagrangeschen Verzerrungstensors ist seine Invarianz gegen-
über Starrkörperrotationen und -translationen. Für eine reine Starrkörperrotation gilt
(3.55)
und der Verschiebungsgradient wird mit Hilfe von (3.46) zu
(3.56)
Eingesetzt in (3.51) und mit der Orthogonalitätsbedingung wird . Die
dl( )2dxT
dx= dL( )2dXT
dX=
dxTdx dXT
dX dXT FTF( )dX dXTdX–=–
d= XT FTF I–( )dX
dXT2E dX=
2 E I D+( )T I D+( ) I–=
E12--- FTF I–( ) 1
2--- D DT
+( ) 12---DT D+= =
Eij12--- ui j, uj i, uk i, uk j,+ +( )=
εij12--- ui j, uj i,+( )=
ηij12--- uk i, uk j,=
dx RdX=
D R I–=
RTR I= E 0=

Verzerrungen und Spannungen bei grossen Verschiebungen
33
Komponenten des Green - Lagrangeschen Verzerrungstensors für eine reine Starrkör-
perrotation sind Null und sie ändern sich auch nicht während einer solchen Bewegung.
Betrachtet man aber im Gegensatz dazu nur dessen Näherung, also den linearen Teil des
Green - Lagrangeschen Verzerrungstensors (‘Engineering Strains’) , was bei kleinen
Verschiebungen üblich ist, so erhält man für
(3.57)
Ausgewertet im zweidimensionalen Fall für die Rotationsmatrix
(3.58)
welche eine Starrkörperrotation um den Winkel beschreibt, ergibt sich zu
(3.59)
Die berechneten Dehnungen verschwinden nicht, sondern nehmen mit dem Quadrat
des Rotationswinkels zu!
3.3.2 Spannungstensor
Ein Spannungsmass, das oft Verwendung findet, ist der 2. Piola - Kirchhoffsche Span-
nungstensor. Dieser errechnet sich aus (Crisfield [9])
(3.60)
wobei den ‘wahren’ oder Cauchyschen Spannungstensor mit seinen Komponenten
zum Zeitpunkt darstellt. Diese ‘wahren’ Spannungen sind durch ‘innere Kräfte des
Körpers pro Flächeneinheit’ zur Zeit definiert in den globalen - Richtungen. stellt
den Deformationsgradienten zum Zeitpunkt bezogen auf die Anfangskonfiguration
dar. Es kann nun gezeigt werden, dass der 2. Piola - Kirchhoffsche Spannungsten-
sor zum Green - Lagrangeschen Verzerrungstensor energetisch konjugiert ist. Ebenso
energetisch konjugiert sind der Cauchysche Spannungstensor mit dem linearen Verzer-
rungstensor. Daher kann die gesamte innere virtuelle Arbeit sowohl mit dem 2. Piola -
Kirchhoffschen als auch mit dem Cauchyschen Spannungstensor berechnet werden.
(3.61)
Der Ausdruck stellt die virtuelle Arbeit zur Zeit im ursprünglichen Einheitsvo-
lumen dar, während die virtuelle Arbeit zum selben Zeitpunkt, aber im augen-
blicklichen Einheitsvolumen darstellt. Die Volumina zum Zeitpunkt und zum
εij
ε 12--- R RT
+( ) I–=
R ϕcos ϕsin–
ϕsin ϕcos=
ϕ ε
ε ϕ 1–cos( ) Iϕ2
2------ I≅=
εii
S detF( ) F 1– σ FT( )1–
=
σσij t
t X Ft
t 0=
δAi δET S V0 δεTσ V
td
Vt∫=d
V0∫=
δETS tV
0 δεTσV
tt
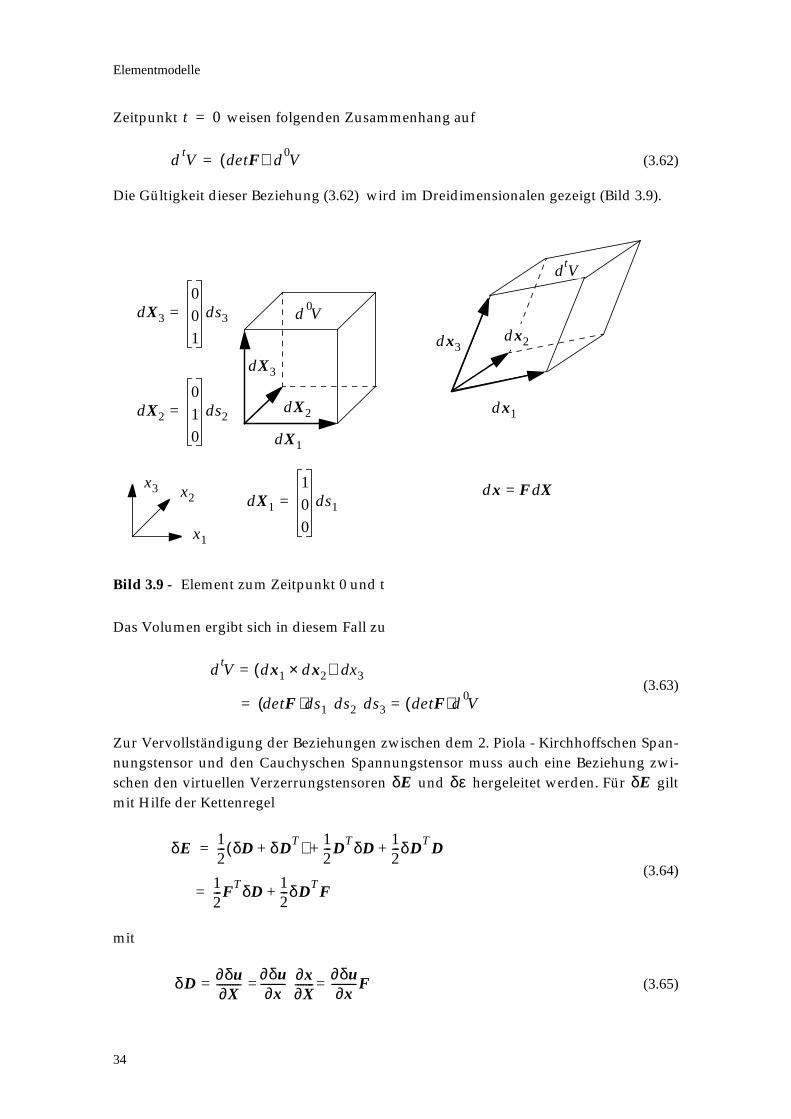
Elementmodelle
34
Zeitpunkt weisen folgenden Zusammenhang auf
(3.62)
Die Gültigkeit dieser Beziehung (3.62) wird im Dreidimensionalen gezeigt (Bild 3.9).
Bild 3.9 - Element zum Zeitpunkt 0 und t
Das Volumen ergibt sich in diesem Fall zu
(3.63)
Zur Vervollständigung der Beziehungen zwischen dem 2. Piola - Kirchhoffschen Span-
nungstensor und den Cauchyschen Spannungstensor muss auch eine Beziehung zwi-
schen den virtuellen Verzerrungstensoren und hergeleitet werden. Für gilt
mit Hilfe der Kettenregel
(3.64)
mit
(3.65)
t 0=
d Vt
detF( ) d V0
=
dX1
dX2
dX1
1
0
0
ds1=
dx1
dX3
dx2dx3
d V0
d Vt
x1
x2x3
dX3
0
0
1
ds3=
dX2
0
1
0
ds2=
dx F dX=
d Vt
dx1 dx2×( )= dx3
detF( )ds1 ds2 ds3 detF( )d V0
==
δE δε δE
δE12--- δD δDT
+( ) 12---DTδD
12---δDT D+ +=
12---= FTδD
12---δDTF+
δD ∂δu∂X---------
∂δu∂x
--------- ∂x∂X-------
∂δu∂x
---------F== =

Verzerrungen und Spannungen bei grossen Verschiebungen
35
und für die virtuellen linearen Verzerrungen (‘Engineering Strains’)
(3.66)
Gleichung (3.64)und (3.65) führen zu folgender Beziehung zwischen den beiden Verzer-
rungstensoren
(3.67)
Eingesetzt in (3.61)
(3.68)
und ausgewertet, ergibt sich unter Ausnützung der Symmetrieeigenschaften der Verzer-
rungstensoren folgender Zusammenhang
(3.69)
Formel (3.60) für den 2. Piola - Kirchhoffschen Spannungstensor erhält man einfach
durch Umformung von (3.69).
Unter der Annahme von kleinen Verzerrungen wird die Streckmatrix (siehe (3.48))
näherungsweise zur Einheitsmatrix. Der Deformationsgradient entspricht nunmehr
der Rotationsmatrix . Mit ergibt sich folgender Zusammenhang zwi-
schen dem 2. Piola - Kirchhoffschen Spannungstensor und dem Cauchyschen Span-
nungstensor
(3.70)
Für kleine Verzerrungen kann der 2. Piola - Kirchhoffsche Spannungstensor als Cauchy-
scher Spannungtensor interpretiert werden, bezogen auf ein Koordinatensystem, wel-
ches mit dem Material mitrotiert. Eine sehr wichtige Eigenschaft des 2. Piola -
Kirchhoffschen Spannungstensors ist die Invarianz seiner Komponenten gegenüber ei-
ner Starrkörperbewegung. Beschränkt man sich, so wie in dieser Arbeit, auf kleine Ver-
zerrungen und bezieht man sich stets auf die Materialkoordinatenrichtungen, dann
braucht man und bzw. und nicht mehr zu unterscheiden. Die gleichen
Materialgesetze, die für kleine Verschiebungen und Rotationen für die ‘Engineering
Strains’ und Cauchyschen Spannungen gelten, gelten bei grossen Verschiebun-
gen und Rotationen auch für die mitrotierten Komponenten des Green - Lagrangeschen
Verzerrungstensors und des 2. Piola - Kirchhoffschen Spannungstensors . Bei
grossen Verzerrungen haben aber die Komponenten des 2. Piola - Kirchhoffschen Span-
nungstensors keine klare physikalische Bedeutung mehr; deshalb ist es auch umso
schwieriger Materialgesetze zu definieren, die der Wirklichkeit entsprechen.
δε 12--- ∂δu
∂x--------- ∂δuT
∂x-------------+
=
δE FT δε F=
Ai etFd( ) δεTσ V0
FTδε F( )TS V
0 δεT FTS F( ) V0
d
V0∫=d
V0∫=d
V0∫=
σ 1detF( )
-----------------F S FT=
UF
R detF( ) 1=
σ RSRT=
εij Eij σij Sij
εij σij
Eij Sij
Sij
Elementmodelle
36
Der Ausdruck (3.61) für die Berechnung der gesamten inneren virtuellen Arbeit mit Hil-
fe des Green - Lagrangeschen Verzerrungstensors und den 2. Piola - Kirchhoffschen
Spannungstensor bildet die Grundlage für die inkrementelle Lagrangesche Formulie-
rung.
3.4 Herleitung der geometrischenSteifigkeitsmatrix aus denMembranknotenkräften
3.4.1 Allgemeines
Verwendet man (2.19) für die Bildung der tangentiellen Steifigkeitsmatrix
(3.71)
so stellt das erste Glied
(3.72)
den Einfluss der initialen Spannungen dar, die durch die geometrische Steifigkeitsmatrix
erfasst werden. Betrachtet man den nichtlinearen Anteil des Green - Lagrang-
eschen Verzerrungstensors mit als Koordinatenindizes
(3.73)
so liefert seine Variation zufolge der virtuellen Knotenverschiebung ( ent-
spricht der Knotenparameternummer) für den nichtlinearen Anteil die Beziehung
(3.74)
und mit ergeben sich die - Koeffizienten aus dem quadratischen Anteil
des Green - Lagrangeschen Verzerrungstensors zu
(3.75)
Das Inkrement der verschiebungsabhängigen Koeffizienten errechnet sich
zufolge des Inkrements des Knotenverschiebungsparameters zu
kT
dp dBTσ V B
Tdσ Vd
V∫+d
V∫ kG k+( ) ad kT ad== =
dBT
σ VdV∫
kG ηijEij i j k, ,
ηij12---uk i, uk j,=
δEij δar r
δηij12--- uk i, δuk j, δuk i, uk j,+( ) Bijr δar= =
uk Hkrar= Bijr
Bijr12--- uk i, Hkr j, Hkr i, uk j,+( )=
dBijr Bijr
das as

Herleitung der geometrischen Steifigkeitsmatrix aus den Membranknotenkräften
37
(3.76)
Durch Einsetzen von (3.76) in (3.72) und unter Berücksichtigung der Symmetrie des
Spannungstensors ergibt sich die geometrische Steifigkeitsmatrix zu
(3.77)
oder angeschrieben in Matrixschreibweise
(3.78)
(3.78) stellt die gleiche Bestimmungsformel dar, wie im Falle von grossen Verschiebun-
gen, nur dass anstelle des Cauchyschen Spannungstensors der 2. Piola - Kirchhoffsche
Spannungstensor tritt. Es ist aus (3.78) ersichtlich, dass die Koeffizienten für den be-
trachteten Zeitpunkt nur eine Funktion der im Element vorhandenen Spannungen
bzw. sind und nicht der Elementverschiebungen. Allerdings müssen die Spannungen
dann aus den Verzerrungen bestimmt werden, die den Einfluss der grossen Ver-
schiebungen mitberücksichtigen.
Betrachtet man ein Plattenelement, das durch initiale, in der Plattenmittelebene wirken-
de Scheibenkräfte beansprucht ist, so leistet wegen der Plattenmittelebene als Anti-
metrieebene nur die virtuelle Verschiebungskomponente in Richtung der
Plattendurchbiegung einen Beitrag zur virtuellen Arbeit der Scheibenkräfte.
Mit und mit
mit (3.79)
die eine Funktion der Lagekoordinaten sind, lässt sich die geometrische Steifigkeitsma-
trix nach (3.78) mit
bzw. (3.80)
bilden. stellt eine 2x2 und eine Matrix dar, wobei die Anzahl der Kno-
tenverschiebungsparameter (Freiheitsgrade) ist.
3.4.2 Die geometrische Steifigkeitsmatrix aus denKnotenkräften
Im vorherigen Kapitel wurde die herkömmliche Herleitung der geometrischen Steifig-
keitsmatrix gezeigt. Um die integrale Neubildung der geometrischen Steifigkeitsmatrix
zu umgehen und um das Konzept der Knotenkräfte aufrecht zu erhalten wird hier
dBijr12--- Hks i, Hkr j, Hkr i, Hks j,+( )das=
σij σ ji=
kGrs Hkr i, σij Hks j, VdV∫=
kG BT
σ B VdV∫=
σS
σS
S E
N
δu3 δw=Nij hσij=
Bir H3r i,= i 1 2,=
kG
kG BTN B Fd
F∫= kGrs H3r i, h σij H3s j, Fd
F∫=
N B 2 mf× mf
kG

Elementmodelle
38
gezeigt, wie sich die geometrische Steifigkeitsmatrix für Platten (Schalen) direkt aus den
Scheibenknotenkräften ermitteln lässt. Betrachtet man ein finites Schalenelement, das
durch seine Scheibenknotenkräfte belastet ist, so greifen am Knotenpunkt die
Membranknotenkräfte und an (Bild 3.10).
Bild 3.10 - Vierknotiges Schalenelement mit seinen Membranknotenkräften
Für die Elementknotenkräfte (Scheibenknotenkräfte) gilt folgende bekannte Beziehung
(3.81)
Für das Verschiebungsfeld der Platte gilt
(3.82)
wobei bei dieser Näherung die isoparametrische Scheibenansatzfunktion für den
Knoten darstellt. Bezeichnet man mit
und mit (3.83)
so lässt sich (3.81) in unüblicher Darstellung anschreiben
(3.84)
mit
pm ipmx
ipmy
i
vi pmxi
pmyi
ui
x
y v
wz
u
pm BmT
σ VdV∫=
w H1w1 … Hiwii
∑=+=
Hii
Bmi x,∂Hi
∂x---------= Bmi y,
∂Hi
∂y---------= i 1…4=
pm
pmx1
pmy1
pmx2
pmy2
pmx3
pmy3
pmx4
pmy4
H1 x, H1 y,
H2 x, H2 y,
H3 x, H3 y,
H4 x, H4 y,
σ11 σ12
σ21 σ22
h F BmT
σ h FdF∫=d
F∫= =
Herleitung der geometrischen Steifigkeitsmatrix aus den Membranknotenkräften
39
(3.85)
Mit (3.80) ergibt sich die geometrische Steifigkeitsmatrix näherungsweise als Funk-
tion der Elementknotenkräfte zu
(3.86)
Die Auswertung für erfolgt hier im Schwerpunkt des Elementes, unter der Annah-
me, dass über die Elementfläche konstant ist. Somit lassen sich nach (3.86) zwei ana-
loge Ausdrücke für angeben. Um die Symmetrie der geometrischen
Steifigkeitsmatrix zu gewährleisten, wird für die Bildung von die einfache Mittel-
wertbildung vorgeschlagen
(3.87)
Die geometrische Steifigkeitsmatrix hat hier die Dimension 4x4, wobei die Koeffizi-
enten nur einen Beitrag zum Plattenverschiebungsfreiheitsgrad liefern. Für Drei-
eckelemente mit konstantem und sind diese Formulierungen exakt. Der
wesentliche Unterschied zur herkömmlichen Formulierung für die geometrische Steifig-
keitsmatrix ist, dass hier nicht Ansatzfunktionen für Platten sondern für Membranen
verwendet werden. Da bei Dreieckelementen ein konstanter Verzerrungszustand im
Element herrscht, ist die Auswertung des Integrals in (3.86) exakt, für Viereckelemente
stellt dies eine Näherung dar. Um die Gültigkeit dieses Verfahrens zu bestätigen, wird
anhand des folgenden Beispiels gezeigt, wie der berechnete Beulwert mit dem theore-
tisch bekannten übereinstimmt.
Betrachtet man einen Plattenstreifen (Bild 3.11), bei dem am linken Rand alle Verschie-
bungen, am rechten Rand nur die Verschiebungen in blockiert sind, und ermittelt man
die Beulwerte für diesen Euler Fall, so erhält man für die Modellierung mit Rechteck-
elementen 390,51 und mit Dreieckelementen einen Wert von 386,4. Der exakte Wert aus
der theoretischen Lösung lässt sich mit
(3.88)
angeben. Dabei wird der Elastizitätsmodul zu , die Querdehnungs-
zahl zu gesetzt. Die Plattendicke beträgt und die Seitenlänge des Plat-
tenstreifens . Die Abweichungen zur theoretischen Lösung betragen bei
Verwendung einer Rechteckmasche (32 Elemente) 1,3% bei Dreiecksmasche (128 Drei-
eckselemente) 0,2%.
BmH1 x, H2 x, H3 x, H4 x,
H1 y, H2 y, H3 y, H4 y,
=
kG
kG BTσ Bh F
BmT
σh FdF∫
Bm pmBm=
BmT σBmh Fd
F∫
BmT
pmT
=
≈dF∫=
Bm
Bm
kGkG
kG12--- pmBm Bm
Tpm
T+( )≈
kGkGij
σ B
y
p σ tEπ2
12 1 ν2–( )
------------------------- ta---
2385 5,= = =
E 3 0E7 kN m2⁄,=
ν 0= t 0 1 m,=a 8m=
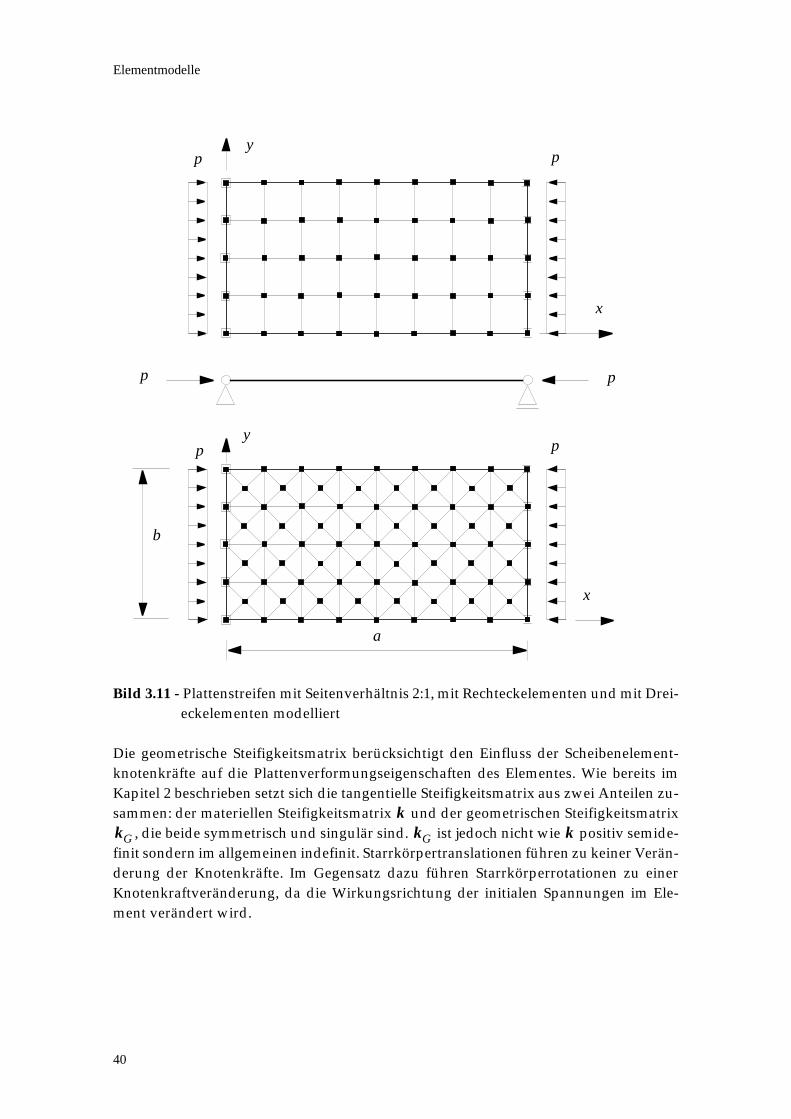
Elementmodelle
40
Bild 3.11 - Plattenstreifen mit Seitenverhältnis 2:1, mit Rechteckelementen und mit Drei-
eckelementen modelliert
Die geometrische Steifigkeitsmatrix berücksichtigt den Einfluss der Scheibenelement-
knotenkräfte auf die Plattenverformungseigenschaften des Elementes. Wie bereits im
Kapitel 2 beschrieben setzt sich die tangentielle Steifigkeitsmatrix aus zwei Anteilen zu-
sammen: der materiellen Steifigkeitsmatrix und der geometrischen Steifigkeitsmatrix
, die beide symmetrisch und singulär sind. ist jedoch nicht wie positiv semide-
finit sondern im allgemeinen indefinit. Starrkörpertranslationen führen zu keiner Verän-
derung der Knotenkräfte. Im Gegensatz dazu führen Starrkörperrotationen zu einer
Knotenkraftveränderung, da die Wirkungsrichtung der initialen Spannungen im Ele-
ment verändert wird.
p p
p p
x
x
y
y
p p
a
b
kkG kG k
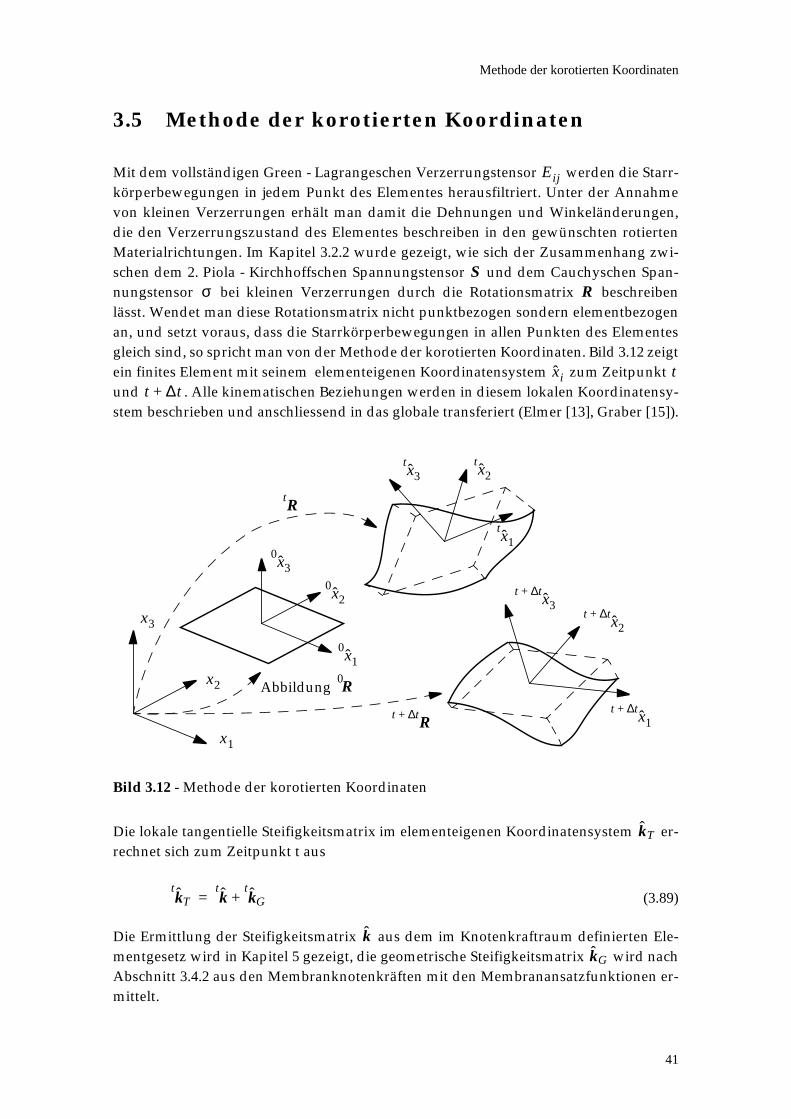
Methode der korotierten Koordinaten
41
3.5 Methode der korotierten Koordinaten
Mit dem vollständigen Green - Lagrangeschen Verzerrungstensor werden die Starr-
körperbewegungen in jedem Punkt des Elementes herausfiltriert. Unter der Annahme
von kleinen Verzerrungen erhält man damit die Dehnungen und Winkeländerungen,
die den Verzerrungszustand des Elementes beschreiben in den gewünschten rotierten
Materialrichtungen. Im Kapitel 3.2.2 wurde gezeigt, wie sich der Zusammenhang zwi-
schen dem 2. Piola - Kirchhoffschen Spannungstensor und dem Cauchyschen Span-
nungstensor bei kleinen Verzerrungen durch die Rotationsmatrix beschreiben
lässt. Wendet man diese Rotationsmatrix nicht punktbezogen sondern elementbezogen
an, und setzt voraus, dass die Starrkörperbewegungen in allen Punkten des Elementes
gleich sind, so spricht man von der Methode der korotierten Koordinaten. Bild 3.12 zeigt
ein finites Element mit seinem elementeigenen Koordinatensystem zum Zeitpunkt
und . Alle kinematischen Beziehungen werden in diesem lokalen Koordinatensy-
stem beschrieben und anschliessend in das globale transferiert (Elmer [13], Graber [15]).
Bild 3.12 - Methode der korotierten Koordinaten
Die lokale tangentielle Steifigkeitsmatrix im elementeigenen Koordinatensystem er-
rechnet sich zum Zeitpunkt t aus
(3.89)
Die Ermittlung der Steifigkeitsmatrix aus dem im Knotenkraftraum definierten Ele-
mentgesetz wird in Kapitel 5 gezeigt, die geometrische Steifigkeitsmatrix wird nach
Abschnitt 3.4.2 aus den Membranknotenkräften mit den Membranansatzfunktionen er-
mittelt.
Eij
Sσ R
xi tt ∆t+
x1
x2
x3
x0
1
x0
2
x0
3
xt
1
xt
2xt
3
xt t∆+
3
xt t∆+
2
xt t∆+
1
Abbildung R0
Rt t∆+
Rt
kT
kt
T kt
kt
G+=
kkG

Elementmodelle
42
Die Matrix und der zu den inneren Elementspannungen äquivalente Knotenkraft-
vektor werden im nächsten Schritt in das globale Koordinatensystem mittels der Ab-
bildungsmatrix rücktransferiert
(3.90)
(3.91)
Die Abbildungsmatrix muss für jeden Iterationschritt neu gebildet werden. Betrachtet
man den Zeitpunkt und kennt man für diesen Zeitpunkt die Abbildungsmatrix , so
liefert die inkrementelle Berechnung Näherungen für die Verschiebungen und Rotatio-
nen in den globalen Koordinatenrichtungen. Mit diesen Näherungen für die inkremen-
tellen Verschiebungsgrössen können nun die Verschiebungen und Rotationen für ein
Schalenelement zum Zeitpunkt angegeben werden. Aus diesen globalen Ver-
schiebungen und Rotationen kann nun eine neue lokale Abbildungsmatrix für
den Zeitpunkt bestimmt werden. Diese wird, falls das Iterationsverfahren kon-
vergiert und damit ein neuer Gleichgewichtszustand für den Zeitpunkt gefunden
wurde, zur Abbildungsmatrix für den nächsten Berechnungsschritt.
Die elementbezogene Abbildungsmatrix , die die Beziehung zwischen den globa-
len und den korotierten Koordinatenrichtungen herstellt, wird aus den 3x3 Submatrizen
gebildet, jeweils für die drei Freiheitsgrade eines Elementpunktes. Die Bildung
der Submatrix
(3.92)
deren Reihen durch die drei Basisvektoren der angepassten Ebene gebildet
werden, erfolgt in zwei Schritten. Im ersten Schritt werden die Eckpunkte des deformier-
ten Elementes in die Ebene projiziert, die durch die drei Basisvektoren im globalen
Koordinatensystem bestimmt wird.
Bild 3.13 - Basisvektoren
kt
T
pt
Rt
kT Rt T
=t
kTˆt
Rt
p Rt T
=t
pt
t Rt
t ∆t+R
t t∆+
t ∆t+t ∆t+
Rt
Rt t∆+
rt t∆+
rt t∆+
e1
e2
e3
=
e1 e2 e3, ,
ei
x1
x2
x3
12
3
4d31d42
d31 x d42
e1
e3
e2
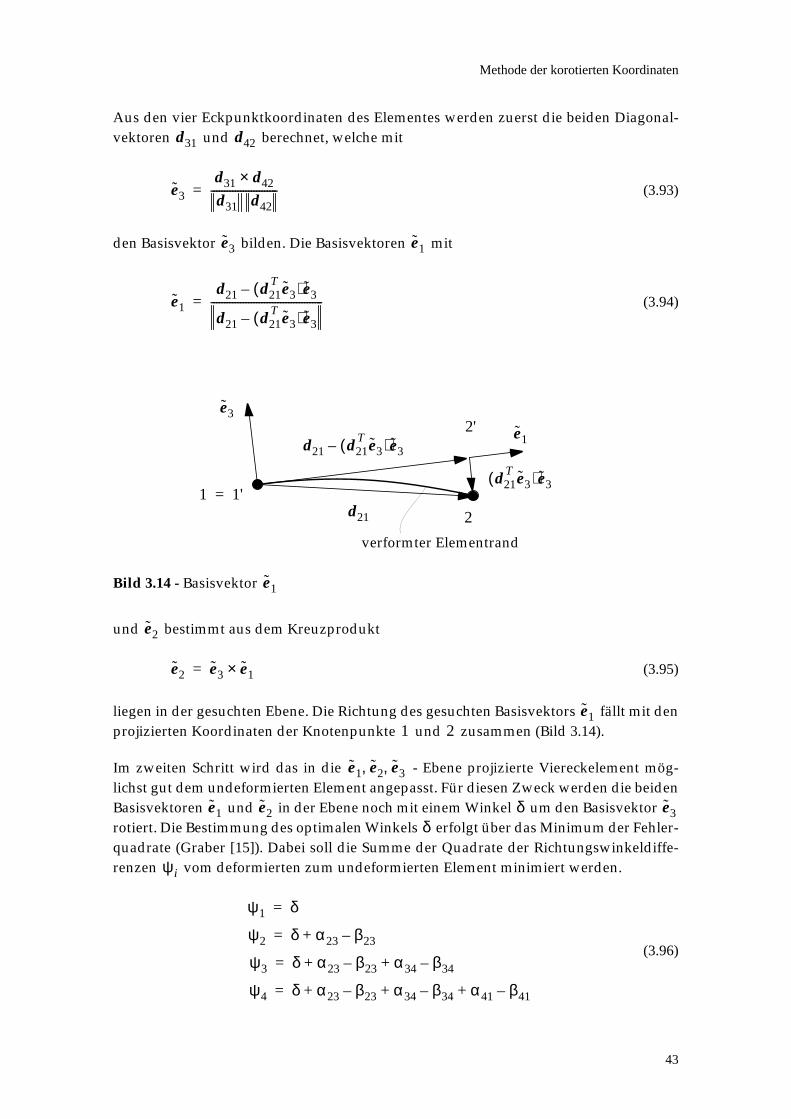
Methode der korotierten Koordinaten
43
Aus den vier Eckpunktkoordinaten des Elementes werden zuerst die beiden Diagonal-
vektoren und berechnet, welche mit
(3.93)
den Basisvektor bilden. Die Basisvektoren mit
(3.94)
Bild 3.14 - Basisvektor
und bestimmt aus dem Kreuzprodukt
(3.95)
liegen in der gesuchten Ebene. Die Richtung des gesuchten Basisvektors fällt mit den
projizierten Koordinaten der Knotenpunkte und zusammen (Bild 3.14).
Im zweiten Schritt wird das in die - Ebene projizierte Viereckelement mög-
lichst gut dem undeformierten Element angepasst. Für diesen Zweck werden die beiden
Basisvektoren und in der Ebene noch mit einem Winkel um den Basisvektor
rotiert. Die Bestimmung des optimalen Winkels erfolgt über das Minimum der Fehler-
quadrate (Graber [15]). Dabei soll die Summe der Quadrate der Richtungswinkeldiffe-
renzen vom deformierten zum undeformierten Element minimiert werden.
(3.96)
d31 d42
e3
d31 d42×d31 d42
-------------------------=
e3 e1
e1
d21 d21T e3( )e3–
d21 d21T e3( )e3–
------------------------------------------=
e1
e3
1 1'=
2d21
d21T e3( )e3
d21 d21T e3( )e3–
verformter Elementrand
2'
e1
e2
e2 e3 e1×=
e11 2
e1 e2 e3, ,
e1 e2 δ e3δ
ψ i
ψ1 δ=
ψ2 δ α23 β23–+=
ψ3 δ α23 β23– α34 β34–+ +=
ψ4 δ α23 β23– α34 β34– α41 β41–+ + +=

Elementmodelle
44
Bild 3.15 - Azimutrotation
Aus den Fehlerquadraten
(3.97)
mit der Minimalbedingung ergibt sich die Bestimmungsgleichung für zu
(3.98)
Die Herleitung für Dreieckselemente wird hier nicht gezeigt, kann aber in analoger Wei-
se durchgeführt werden und führt zu folgender Bestimmungsgleichung für
(3.99)
Die endgültige Abbildungsmatrix ergibt sich aus dem Produkt der von den drei
Basisvektoren gebildeten Matrix mit der Rotationsmatrix zu
(3.100)
Die Anwendung der korotierten Koordinaten verlangt die Herausfiltrierung der Starr-
körperanteile aus den verzerrungserzeugenden Anteilen. Dies ist aber bei Elementen mit
Rotationsfreiheitsgraden nicht unproblematisch, weil diese zwar als Vektoren aufgefasst
werden, bezüglich Addition und Subtraktion aber keine Vektoreigenschaften besitzen.
Die Reihenfolge zweier aufeinanderfolgender Rotationen muss beachtet werden und
das Kommutativgesetz gilt nur für infintesimal kleine Rotationen!
e1
e1
e2e2
δ
α23
α34
α41
β23
β34
β41
unverformtes Element
verformtes Element
g ψ i2
i∑=
∂g∂δ------ 0= δ
δ 14--- 3 β23 α23–( ) 2 β34 α34–( ) β41 α41–( )+ +[ ]–=
δ
δ 13--- 2 β23 α23–( ) β31 α31–( )+[ ]–=
rt t∆+
ei r
rt t∆+
rt t∆+
δcos δsin 0
δsin– δcos 0
0 0 1
=

Methode der korotierten Koordinaten
45
Für die Herleitung der linearisierten Gleichungen soll der Verschiebungsvektor mit
seinen sechs Freiheitsgraden pro Knoten (drei tanslatorische und drei rotationale bei
Schalenelementen) in die translatorischen und rotationalen Freiheitsgrade aufge-
spalten werden. Vergleicht man die ursprüngliche Konfiguration mit der momentanen
Konfiguration zur Zeit , so lassen sich die verzerrungserzeugenden Verschiebun-
gen eines Elementpunktes mit
(3.101)
bestimmen, wobei der Koordinatenvektor zum betrachteten Elementpunkt ist. Die
verzerrungserzeugenden Rotationen im neuen korotierten Koordinatensystem berech-
nen sich zu (Bild 3.12)
(3.102)
Dabei stellt bzw. die aufsummierten Verschiebungs - bzw. Rotationsinkremente
dar und die aufsummierten Starrkörperrotationsinkremente bis zum Zeitpunkt ,
und sind die Verschiebungs- bzw. Rotationsinkremente vom Zeitpunkt bis
zum Zeitpunkt im globalen Koordinatensystem. Als einzige unbekannte Grösse
im Ausdruck (3.102) treten die Starrkörperrotationsinkremente auf. Elmer [13] hat
gezeigt, dass sich die Starrkörperrotationsinkremente vom Zeitpunkt bis zum Zeit-
punkt aus
(3.103)
errechnen, wobei mit den Elementen der Matrix aus
(3.104)
wie folgt definiert ist
(3.105)
Somit sind alle Bestimmungsgrössen zur Ermittlung der verzerrungserzeugenden Ver-
schiebungen und Rotationen im lokalen mitgehenden Koordinatensystem gegeben.
a
aD aR
t ∆t+
at t∆+
D rt t∆+
x0
at
D ∆aD+ +( ) r0
x0( )–=
x0
at t∆+
R rt t∆+
at
R Ωt– ∆aR ∆Ω–+( )=
at
D at
RΩt t
∆aD ∆aR tt ∆t+
∆Ωt
t ∆t+
∆Ω 2 ωatanω
---------------------ω=
ω rt ∆t+
t
rt t∆+
t rt T
rt t∆+
=
ω 1
1 r iii 1=
3
∑+
------------------------
r32 r23–
r31 r13–
r12 r21–
=

46
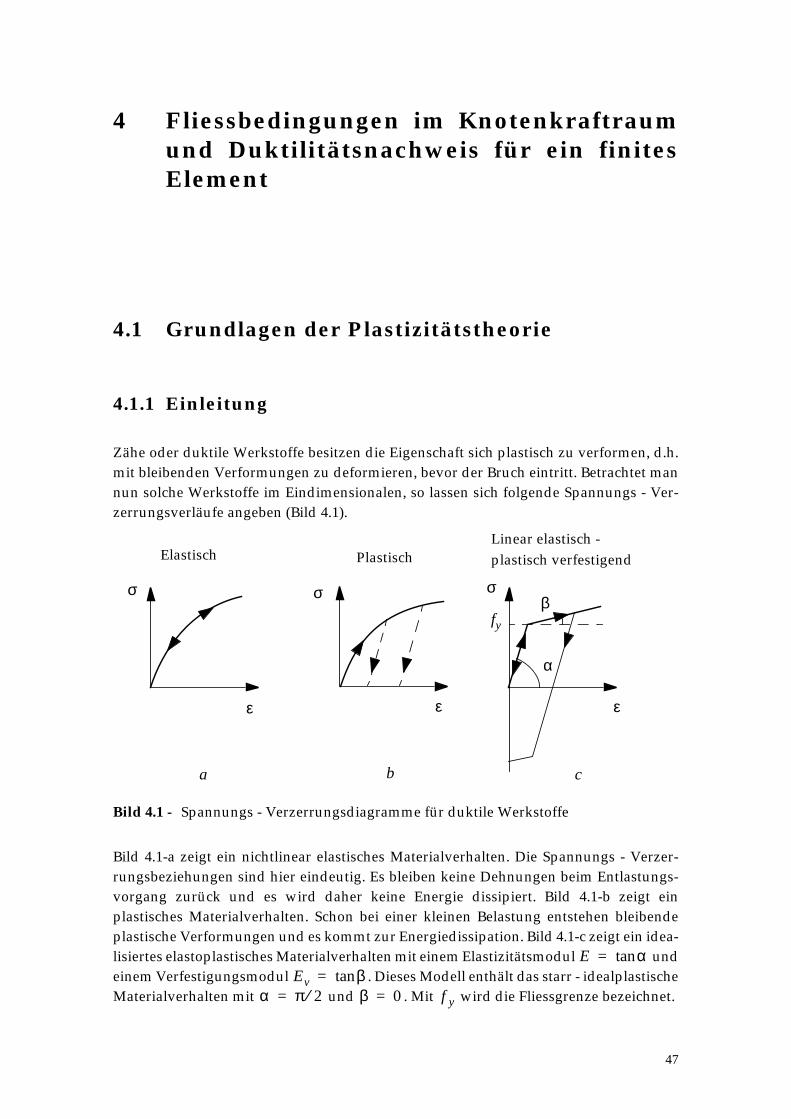
47
4 Fliessbedingungen im Knotenkraftraumund Duktilitätsnachweis für ein finitesElement
4.1 Grundlagen der Plastizitätstheorie
4.1.1 Einleitung
Zähe oder duktile Werkstoffe besitzen die Eigenschaft sich plastisch zu verformen, d.h.
mit bleibenden Verformungen zu deformieren, bevor der Bruch eintritt. Betrachtet man
nun solche Werkstoffe im Eindimensionalen, so lassen sich folgende Spannungs - Ver-
zerrungsverläufe angeben (Bild 4.1).
Bild 4.1 - Spannungs - Verzerrungsdiagramme für duktile Werkstoffe
Bild 4.1-a zeigt ein nichtlinear elastisches Materialverhalten. Die Spannungs - Verzer-
rungsbeziehungen sind hier eindeutig. Es bleiben keine Dehnungen beim Entlastungs-
vorgang zurück und es wird daher keine Energie dissipiert. Bild 4.1-b zeigt ein
plastisches Materialverhalten. Schon bei einer kleinen Belastung entstehen bleibende
plastische Verformungen und es kommt zur Energiedissipation. Bild 4.1-c zeigt ein idea-
lisiertes elastoplastisches Materialverhalten mit einem Elastizitätsmodul und
einem Verfestigungsmodul . Dieses Modell enthält das starr - idealplastische
Materialverhalten mit und . Mit wird die Fliessgrenze bezeichnet.
ε
σ
ε
σ σ
ε
α
βfy
Elastisch Plastisch
Linear elastisch -
plastisch verfestigend
a b c
E αtan=Ev βtan=
α π 2⁄= β 0= f y

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
48
Beim einachsigen Spannungszustand lässt sich der Übergang vom elastischen in den
plastischen Zustand leicht abgrenzen. Ist die Bedingung erfüllt, so verhält
sich der Werkstoff elastisch, wird aber , so treten plastische Formänderun-
gen auf und es kommt zur Energiedissipation.
Betrachtet man aber im Gegensatz dazu den Spannungszustand eines dreidimensiona-
len Körpers, so kann der Übergang vom elastischen in den plastischen Zustand nicht
mehr so einfach angegeben werden. Deshalb definiert man zunächst verallgemeinerte
Spannungen , , ... , mit ihren dazugehörigen verallgemeinerten Verzerrungen
, , ..., . In einem dreidimensionalen Kontinuum stellen die die sechs Kompo-
nenten des Spannungstensors und die die dazugehörigen Komponenten des Verzer-
rungstensors dar. Daraus lässt sich die inkrementelle spezifische Formänderungsarbeit
mit
(4.1)
berechnen. Betrachtet man ein dreidimensionales Kontinuum unter einem gegebenen
homogenen Verzerrungsfeld, so zwingt sich die Frage nach dem zugehörigen Span-
nungsfeld auf. Es stellt sich dabei genau dasjenige Spannungsfeld ein, für das die spezi-
fische Formänderungsarbeit maximal wird (Mobilisierung des grösstmöglichen
Widerstandes gegen die Verformung). Somit lässt sich folgende Bedingung ableiten:
Wählt man die ‘s (oder die ‘s), dann sind die ‘s (bzw. die ‘s) eindeutig gegeben.
Es wird nun eine Fliessbedingung aufgestellt mit
(4.2)
welche im - dimensionalen Spannungsraum den Beginn des Fliessens anzeigt. Durch
diese Fliessbedingung wird eine konvexe Fliesshyperfläche im Raum der verallge-
meinerten Spannungen definiert. Ist ein Punkt des Körpers im elastischen Zustand so
gilt , d.h. der Punkt befindet sich innerhalb des Spannungsraumes, der von der
Fliessfläche umschlossen wird (aplastischer Bereich). Im aplastischen Bereich befindet
sich auch der Ursprung mit . Bei liegt der Punkt auf der Hyperfläche. Die
Hyperfläche ist in sich geschlossen, wenn keine ausgezeichneten Spannungszustände
existieren, die von der Fliessbedingung unabhängig sind. Ist die Hyperfläche offen, so
existieren Spannungszustände, deren Komponenten im beliebigen Masse gesteigert
werden können, ohne dass dabei der plastische Zustand eintritt. Bild 4.2 zeigt eine Flies-
shyperfläche im Raum der verallgemeinerten Spannungen.
Spaltet man die verallgemeinerten Verzerrungen in einen elastischen und in einen
plastischen Anteil auf, so errechnet sich die inkrementelle plastische Dissipationsar-
beit zu
(4.3)
σσ f y 0<–
σ f y– 0=
S1 S2 Snq1 q2 qn Si
qi
dU
dU Si qi σij εijd VdV∫=
i∑=
Si qi qi Si
Φ S1 S2 … Sn, , ,( ) 0=
nΦ
Φ 0<
S 0= Φ 0=
qi qeiqpi
dD S1qp1 … STqp=+=

Grundlagen der Plastizitätstheorie
49
Bild 4.2 - Fliessbedingung im Raum der verallgemeinerten Spannungen
Betrachtet man ein vorgegebenes plastisches Verzerrungsinkrement mit einem dazu-
gehörigen verträglichen Spannungszustand an der Fliessgrenze und einen beliebigen
aplastischen Spannungszustand so folgt aus
bzw. (4.4)
das Prinzip der maximalen Dissipationsarbeit nach von Mises (Bild 4.2). Setzt man (4.4)
als Postulat voraus, so ergibt sich neben der Konvexität der Fliessgrenze noch folgende
Bedingung (Axiom der Normalität)
(4.5)
Liegt ein Spannungspunkt auf der Fliesshyperfläche , so muss auch
ein benachbarter Spannungspunkt, der durch das Spannungsinkrement erreicht wird
die Bedingung erfüllen, da physikalisch unmöglich ist
(4.6)
Beide Punkte erfüllen die Bedingung (4.2). Dabei liegen die Spannungsinkremente in
der Hyperebene , die eine Tangentialebene von darstellt und daher senkrecht auf
steht. Der Vergleich von (4.5) mit (4.6) liefert das assoziierte Fliessgesetz
(4.7). Dieses drückt die Tatsache aus, dass die Fliessfunktion zur Potentialfunktion für
die plastischen Verzerrungsinkremente wird.
mit und bei , sonst (4.7)
0
E
SS*
Φ 0= Φ 0<
P
S1
Sk
Sm
qp
S
Φ S
qpS
S*
S*Tqp STqp≤ S S*
–( )Tqp 0≥
S1qp1 … STqp=+ 0=
S S1 … Sn, ,( )= ΦS
Φ 0= Φ 0>
∂Φ∂S1--------S1 … 0=+
S
E Φ∂Φ∂S1-------- … ∂Φ
∂Sn--------, ,
qpi
qpi∂Φ∂Si------- λ= i 1…n= λ 0≥ Φ 0= λ 0=

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
50
Dabei ist ein noch zu bestimmender nichtnegativer Faktor. Dieses Gesetz stellt den
Zusammenhang zwischen den plastischen Verzerrungsinkrementen und dem Span-
nungstensor dar. Es bezeichnet bei bekanntem Spannungszustand eindeutig die Rich-
tung des plastischen Verzerrungsinkrement - Vektors. Der Betrag des Vektors wird
durch den Skalarfaktor bestimmt.
Die inkrementelle plastische Dissipationsarbeit (4.3) kann mit Hilfe des Fliessgesetzes
mit
(4.8)
ausgedrückt werden. Die Verknüpfung der Fliessbedingung mit dem Fliessgesetz geht
auf von Mises zurück und ist als Theorie des plastischen Potentials bekannt. Erweitert
wurde diese Theorie durch Koiter [18] für den Fall, dass die Fliessgrenze durch mehrere
Funktionen beschrieben wird
....... ....... (4.9)
und das dazugehörige Fliessgesetz lautet dann
(4.10)
Die Funktionen können auch linear sein, womit jede durch eine oder mehrere nicht-
lineare Ungleichungen definierte Fliessfigur mit Hilfe von Teilflächen approximiert wer-
den kann, die im Spannungsraum eben sind. Mit anderen Worten, jede konvexe
nichtlineare Fliessfigur kann durch eine polyedrische, von “Fliessebenen” definierte
Fliessfigur beliebig genau approximiert werden. Die entsprechenden linearen Fliessbe-
dingungen schreiben sich dann wie folgt
(4.11)
wobei mit der Fliessvektor bezeichnet wird, der im Spannungsraum senkrecht zur k
- ten Fliessfläche steht und zur Aussenseite des zulässigen Spannungsgebietes zeigt und
mit als dazugehörigen plastischen Widerstand. Stellt einen Einheitsvektor dar,
so bezeichnet den Abstand der k - ten Fliessebene vom Spannungsnullpunkt. Führt
man eine durch die ‘s gebildete Matrix und einen durch die ‘s gebildeten Wi-
derstandsvektor ein, so kann für die Ungleichungen in (4.11) noch geschrieben wer-
den
(4.12)
Für das Fliessgesetz gilt
λ
λ
dD λ ST ∂Φ∂S------- λ S T gradΦ==
Φ1 … Φn, ,
Φ1 S1 … Sn, ,( ) Φk S1 … Sn, ,( ) Φn S1 … Sn, ,( )
qpi
∂Φk
∂Si---------- λk
k 1=
n
∑=λk 0 falls Φk 0<=
λk 0 falls Φk 0=≥
Φk
YkTS WYk≤
Yk
WYk YkWYk
Yk Y WYkWY
YTS WY≤

Grundlagen der Plastizitätstheorie
51
(4.13)
Bild 4.3 - Stückweise linearisierte Fliessfläche mit aktiven Fliessbedingungen im Eck
Die plastischen Verzerrungsinkremente errechnen sich aus dem assoziierten Fliessge-
setz aus (4.13)
4.1.2 Grenzwertsätze
Mit dem Prinzip der virtuellen Arbeit und mit dem Prinzip der maximalen Dissipations-
arbeit lassen sich für Strukturen mit elastoplastischen und starrplastischen Materialver-
halten zwei Grenzwertsätze formulieren (Marti [20])
Statischer oder unterer Grenzwertsatz:
Jede Belastung, zu der sich ein statisch zulässiger Spannungszustand ange-
ben lässt, der die Fliessbedingung nirgends verletzt, liegt nicht höher als die
Traglast.
Als statisch zulässigen Spannungszustand bezeichnet man ein Spannungsfeld, dass an
keiner Stelle die statischen Rand- und Gleichgewichtsbedingungen verletzt.
Kinematischer oder oberer Grenzwertsatz:
Jede Belastung, deren Leistung bei einem kinematisch zulässigen Bewe-
gungszustand, der inneren Dissipationsleistung gleicht, liegt nicht tiefer als
die Traglast.
qp Yk λkk∑=
λk 0 falls YkT S WYk– 0<=
λk 0 falls YkT S WYk– 0=≥
WYk
Φk
S1
S2
qp
S
Yk Yk qpk
=
Yk 1+ qpk 1+
=
qp Yk λk= Yk 1+ λk 1++
k
k+1
S
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
52
Als kinematisch zulässiger Bewegungszustand wird ein Verschiebungs- bzw. Verzer-
rungszustand bezeichnet, der die kinematischen Relationen zwischen (äusseren) Ver-
schiebungen und (inneren) Verzerrungen und die kinematischen Rand- und
Kontinuitätsbedingungen erfüllt. Aus den beiden Grenzwertsätzen kann nun auf den
Eindeutigkeitssatz geschlossen werden.
EindeutigkeitssatzJede Belastung, für die eine vollständige Lösung angegeben werden kann,
stellt eine Traglast dar.
Unter vollständige Lösung versteht man einerseits einen statisch zulässigen Spannungs-
zustand, der die Fliessbedingung nirgends verletzt, und andererseits einen kinematisch
zulässigen Verformungszustand nach der Theorie des plastischen Potentials.
4.2 Linearisierung der Fliessbedingungen
4.2.1 Stahlbetonscheiben
Für das Aufstellen der Fliessbedingungen für Stahlbetonscheiben werden folgende An-
nahmen getroffen (Müller [23])
Der Beton kann nur Druck aufnehmen. Seine Zugfestigkeit wird vernachlässigt.
Der Einfluss der Bewehrung wird über einen einaxialen Spannungszustand in Stab-
längsrichtung erfasst (‘verschmierte’ Bewehrung).
Die Bewehrung steht im starren Verbund mit dem umgebenden Beton. Ein Ver-
bundversagen (lokales Versagen durch Ausbrechen bzw. Abplatzen des Betons)
wird ausgeschlossen.
Die Erhöhung der zweiaxialen Betondruckfestigkeit gegenüber der einaxialen
Druckfestigkeit wird vernachlässigt.
Wegen der geringen Bewehrungsgehalte wird der Einfluss der Bewehrung auf
Druck vernachlässigt.
Betrachtet man nun ein in x - und y - Richtung orthogonal bewehrtes Stahlbetonschei-
benelement der Dicke mit seinen Membrankräften , und den Schubkräften
, so gilt
(4.14)
wobei der Index für Beton und für Stahl steht (siehe auch Bild 4.4).
h nx nynxy nyx=
nx h σx ncx= nsx+=
ny h σy ncy= nsy+=
nxy h τxy n= cxy=
c s

Linearisierung der Fliessbedingungen
53
Bild 4.4 - Bewehrtes Stahlbetonscheibenelement aus der Superposition von Beton und
Stahl
Im , , - Spannungsraum ergibt sich die Fliessbedingung für den Beton mit
seinem plastischen Widerstand in Richtung der Hauptspannungen bzw. aus
(4.15)
oder für beliebige Werte von , und gleichwertig angeschrieben mit
(4.16)
(4.17)
Der plastische Widerstand ist gegeben durch
(4.18)
mit als Reduktionsfaktor zur Betondruckfestigkeit . Mit diesem wird berück-
sichtigt, dass die im Bruchzustand mitwirkende Scheibendicke und die massgebende
Betondruckfestigkeit kleiner sein können als die nominelle Scheibendicke und die no-
minelle Betondruckfestigkeit . Für den Stahl gelten die Fliessbedingungen
(4.19)
wobei und die Bewehrungsflächen in x bzw. y pro Einheitsbreite bezeichnen,
bezeichnet die Fliessgrenze des Bewehrungsstahles.
x
y
ny
nx
nxy
nxy
θ12
= +ncx
ncxy
ncy
ncxy
nsx
nsxy 0=
nsynsxy 0=
Scheibenelement Beton Stahl
ncx ncy ncxy
r c nc1 nc2
r c nc1 2,ncx ncy+
2---------------------=
ncx ncy–( )2
4---------------------------- ncxy
2+ 0≤±≤–
ncx ncy ncxy
ncxy2
ncxncy≤ ncx 0≤ ncy 0≤
ncxy2
r c ncx+( ) r c ncy+( )≤ r c ncx 0≥+ r c ncy 0≥+
r c
r c κ f c h=
κ 1≤ f c
hf c
0 nsx r sx+
a= sx+
f y≤ ≤
0 nsy r sy+
a= sy+
f y≤ ≤
asx+
asy+
f y
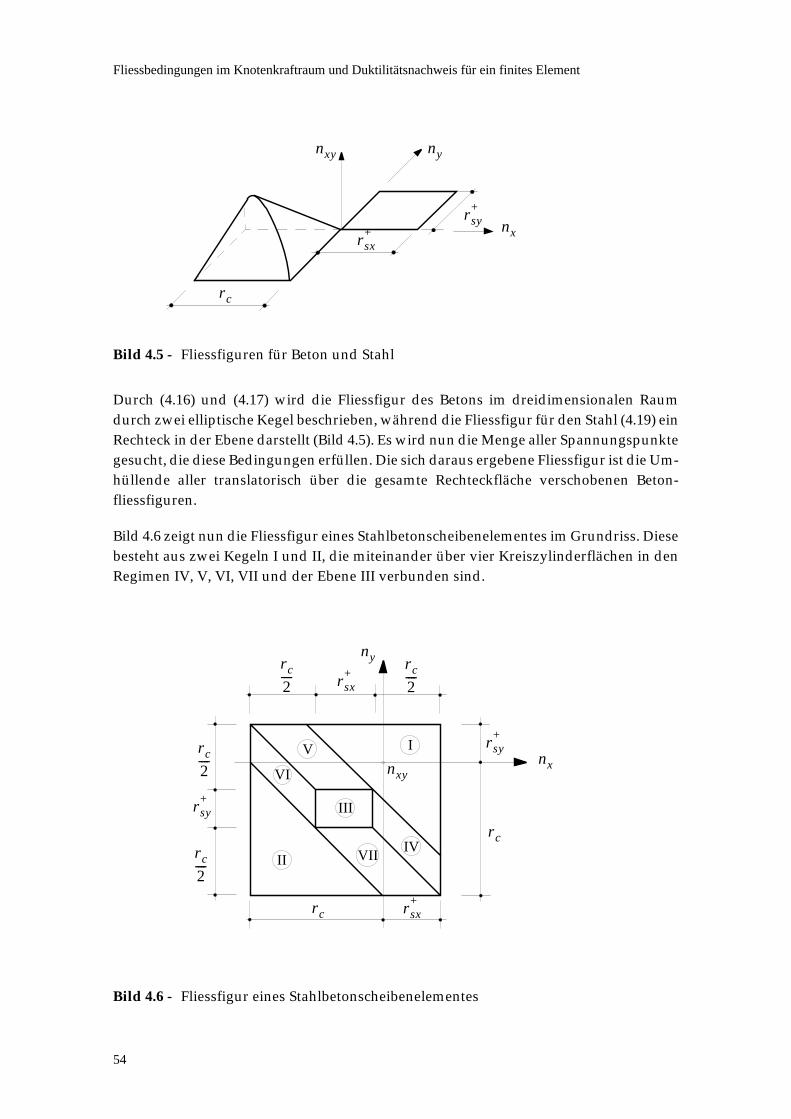
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
54
Bild 4.5 - Fliessfiguren für Beton und Stahl
Durch (4.16) und (4.17) wird die Fliessfigur des Betons im dreidimensionalen Raum
durch zwei elliptische Kegel beschrieben, während die Fliessfigur für den Stahl (4.19) ein
Rechteck in der Ebene darstellt (Bild 4.5). Es wird nun die Menge aller Spannungspunkte
gesucht, die diese Bedingungen erfüllen. Die sich daraus ergebene Fliessfigur ist die Um-
hüllende aller translatorisch über die gesamte Rechteckfläche verschobenen Beton-
fliessfiguren.
Bild 4.6 zeigt nun die Fliessfigur eines Stahlbetonscheibenelementes im Grundriss. Diese
besteht aus zwei Kegeln I und II, die miteinander über vier Kreiszylinderflächen in den
Regimen IV, V, VI, VII und der Ebene III verbunden sind.
Bild 4.6 - Fliessfigur eines Stahlbetonscheibenelementes
r c
nx
nxy
r sx+
ny
r sy+
nx
ny
nxy
I
II
III
IV
V
VI
VII
r c r sx+
r sy+
r c
r c
2----
r sy+
r c
2----
r c
2---- r sx
+r c
2----

Linearisierung der Fliessbedingungen
55
Die einzelnen Regime der Fliessfigur genügen den Bedingungen
(4.20)
Diese Bedingungen charakterisieren auch die unterschiedlichen Brucharten des Stahlbe-
tonscheibenelementes
Regime I: beide Bewehrungslagen fliessen auf Zug, während die kleinere Beton-
hauptdruckspannung Werte zwischen annimmt
Regime II: die grössere Betonhauptdruckspannung nimmt Werte zwischen
an, aber für gilt: . Dies ist der einzige Fall, wo
der Beton einem zweiaxialen Druckspannungszustand unterliegt
Regime III: für beide Bewehrungslagen in x und y gilt: und
Regime IV: die Bewehrung in x kommt ins Fliessen, für die Bewehrung in y gilt:
Regime V: die Bewehrung in y kommt ins Fliessen, für die Bewehrung in x gilt:
Regime VI: für die Bewehrung in y gilt: , die Bewehrung in x bleibt span-
nungslos
Regime VII: für die Bewehrung in x gilt: , die Bewehrung in y bleibt span-
nungslos
Auf den Fliessflächen III, IV, V, VI, VII beträgt die grössere Betonhauptdruckspannung
und die kleinere . Es liegt somit ein einaxialer Spannungszustand
vor.
Die im Bild 4.6 dargestellte Fliessfigur soll nun durch ebene Teilflächen dargestellt wer-
den. Approximiert man die Betonfliessfigur durch eine Pyramide und ermittelt man dar-
aus wieder die Umhüllende für alle möglichen Verschiebungszustände aus dem
Abfahren dieser Pyramide über die Rechteckfläche, so ergibt die linearisierte Fliessfläche
einen Kegelstumpf. Die stückweise linearisierten Fliessbedingungen sind im Bild 4.7
dargestellt. Betrachtet man nur die obere Hälfte des Pyramidenstumpfes, so werden die
nichtlinearen Fliessflächen I, IV durch die lineare Fliessebene 1, die Flächen I, V durch
die Fliessebene 3, die Flächen II, VI durch die Fliessebene 5, die Flächen II, VII durch die
ΦI nxy2
r sx+
nx–( ) r sy+
ny–( ) 0≤–=
ΦII nxy2
r c nx+( ) r c nx+( ) 0≤–=
ΦIII nxy2 r c
2----
2
0≤–=
ΦIV nxy2
r sx+
nx–( )– r c r– sx+
nx+( ) 0≤=
ΦV nxy2
r c r sy+
n+ y–( )– r sy+
ny–( ) 0≤=
ΦVI nxy2
nx r c nx+( ) 0≤+=
ΦVII nxy2
ny r c ny+( ) 0≤–=
r c nc2 0≤ ≤–
r c nc1 0≤ ≤– nc2 nc2 r c–=
0 nsx r sx+≤ ≤ 0 nsy r sy
+≤ ≤
0 nsy r sy+≤ ≤
0 nsx r sx+≤ ≤
0 nsy r sy+≤ ≤
0 nsx r sx+≤ ≤
nc1 0= nc2 r c–=
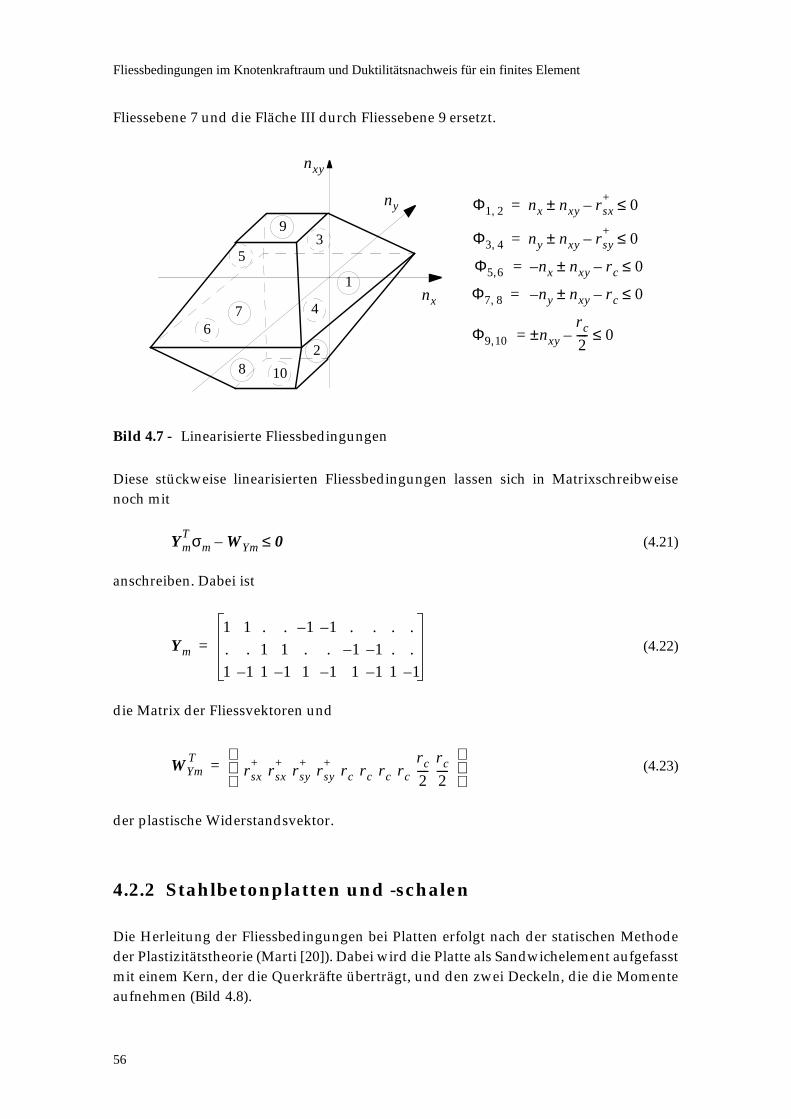
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
56
Fliessebene 7 und die Fläche III durch Fliessebene 9 ersetzt.
Bild 4.7 - Linearisierte Fliessbedingungen
Diese stückweise linearisierten Fliessbedingungen lassen sich in Matrixschreibweise
noch mit
(4.21)
anschreiben. Dabei ist
(4.22)
die Matrix der Fliessvektoren und
(4.23)
der plastische Widerstandsvektor.
4.2.2 Stahlbetonplatten und -schalen
Die Herleitung der Fliessbedingungen bei Platten erfolgt nach der statischen Methode
der Plastizitätstheorie (Marti [20]). Dabei wird die Platte als Sandwichelement aufgefasst
mit einem Kern, der die Querkräfte überträgt, und den zwei Deckeln, die die Momente
aufnehmen (Bild 4.8).
Φ1 2, nx nxy± r sx+
0≤–=
Φ3 4, ny nxy± r sy+
0≤–=
Φ5 6, n– x nxy± r c 0≤–=
Φ7 8, n– y nxy± r c 0≤–=
Φ9 10, n± xy
r c
2---- 0≤–=
nx
ny
nxy
1
35
7
9
2
4
6
8 10
YmT σm WYm– 0≤
Ym
1 1 . . 1– 1– . . . .
. . 1 1 . . 1– 1– . .
1 1– 1 1– 1 1– 1 1– 1 1–
=
WYmT
rsx+
r sx+
r sy+
r sy+
r c r c r c r c
r c
2----
r c
2----
=
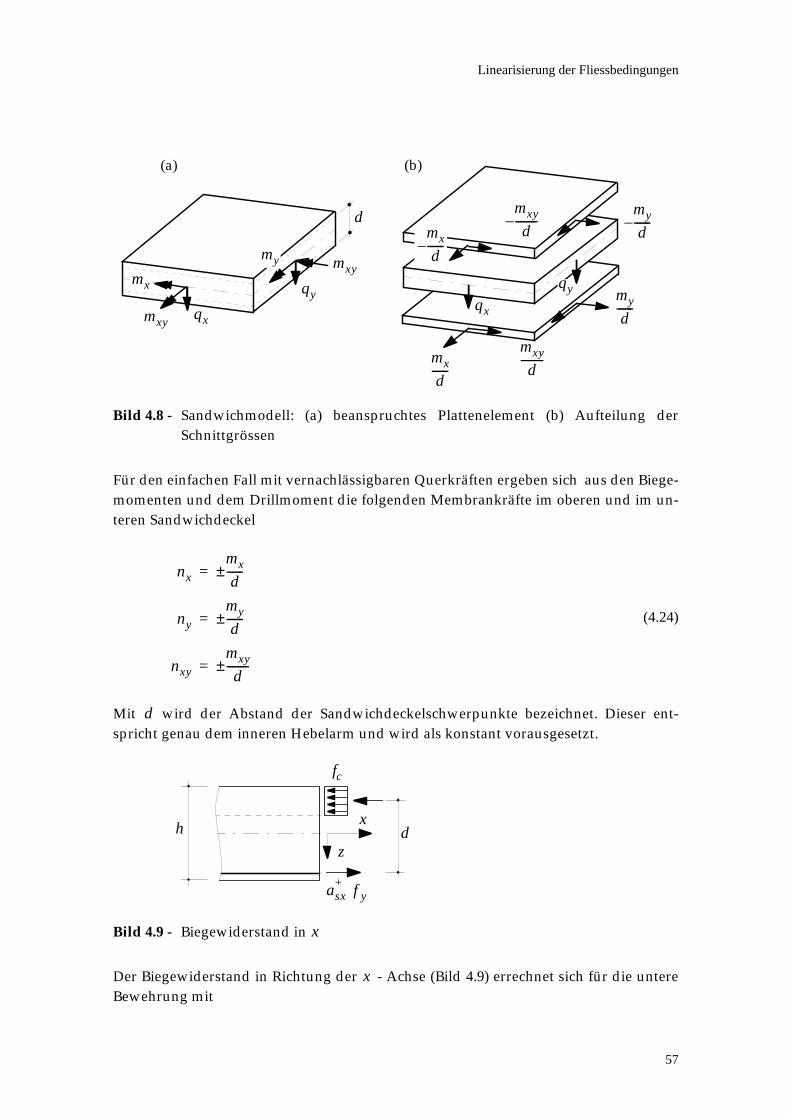
Linearisierung der Fliessbedingungen
57
Bild 4.8 - Sandwichmodell: (a) beanspruchtes Plattenelement (b) Aufteilung der
Schnittgrössen
Für den einfachen Fall mit vernachlässigbaren Querkräften ergeben sich aus den Biege-
momenten und dem Drillmoment die folgenden Membrankräfte im oberen und im un-
teren Sandwichdeckel
(4.24)
Mit wird der Abstand der Sandwichdeckelschwerpunkte bezeichnet. Dieser ent-
spricht genau dem inneren Hebelarm und wird als konstant vorausgesetzt.
Bild 4.9 - Biegewiderstand in
Der Biegewiderstand in Richtung der - Achse (Bild 4.9) errechnet sich für die untere
Bewehrung mit
(a) (b)
mxy
mx
my mxy
mx
d------
mxy
d--------
my
d------qx
qy
my
d------–
mxy
d--------–
mx
d------–
qx
qy
d
nx
mx
d------±=
ny
my
d------±=
nxy
mxy
d--------±=
d
x
z
asx+
f y
fc
dh
x
x

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
58
(4.25)
Dabei bezeichnet die Stahlquerschnittsfläche in - Richtung pro Breiteneinheit,
die Fliessgrenze des Bewehrungsstahles. Der Biegewiderstand für die obere Bewehrung
in - Richtung ermittelt sich aus
(4.26)
Die Biegewiderstände für die Bewehrungen in und lassen sich analog berech-
nen. Setzt man die Beziehungen (4.24), (4.25) und (4.26) in die Fliessbedingungen für or-
thogonal bewehrte Scheibenelemente (4.20) ein, so ergibt sich für das Fliessregime I
folgende Fliessbedingung
(4.27)
Für die Bemessung von Stahlbetonplatten wird in der Regel Fliessregime I (Betondruck-
festigkeit wird nie massgebend!) zugrundegelegt. Dieses Regime entspricht der er-
wünschten duktilen Bruchart für die beiden Bewehrungslagen, ohne dass dabei die
Beanspruchung im Beton massgebend wird. Den Beziehungen in (4.27) entsprechen im
, , - Raum zwei elliptische Kegel (Bild 4.10).
Bild 4.10 - Nichtlineare Fliessbedingung und linearisierte Fliessbedingungen für Platten
Die Fliessbedingungen in (4.27) lassen sich auch wiederum in linearisierter Form an-
schreiben
mx+
asx+
f y d=
asx+
x f y
x
mx-
asx-
f y d=
y my+
my-
mxy
d--------
2 mx
+
d-------
mx
d------–
my
+
d-------
my
d------–
0≤–
mxy
d--------
2 mx
-
d------
mx
d------+
my
-
d------
my
d------+
0≤–
mx my mxy
my-
my+
mx-mx
-
mx
my
mxy
mx+
my-
my+
mx
my
mxy
Φ1
Φ7
Φ2Φ8
mx+
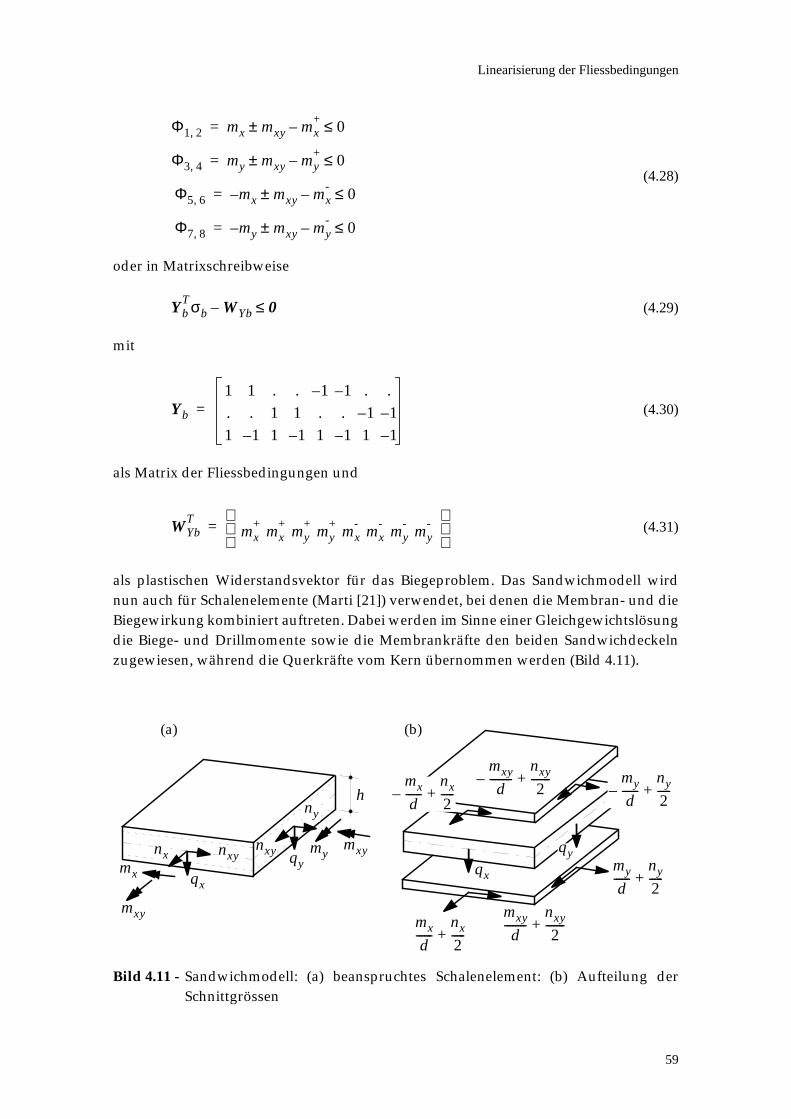
Linearisierung der Fliessbedingungen
59
(4.28)
oder in Matrixschreibweise
(4.29)
mit
(4.30)
als Matrix der Fliessbedingungen und
(4.31)
als plastischen Widerstandsvektor für das Biegeproblem. Das Sandwichmodell wird
nun auch für Schalenelemente (Marti [21]) verwendet, bei denen die Membran- und die
Biegewirkung kombiniert auftreten. Dabei werden im Sinne einer Gleichgewichtslösung
die Biege- und Drillmomente sowie die Membrankräfte den beiden Sandwichdeckeln
zugewiesen, während die Querkräfte vom Kern übernommen werden (Bild 4.11).
Bild 4.11 - Sandwichmodell: (a) beanspruchtes Schalenelement: (b) Aufteilung der
Schnittgrössen
Φ1 2, mx mxy± mx+
0≤–=
Φ3 4, my mxy± my+
0≤–=
Φ5 6, m– x mxy± mx-
0≤–=
Φ7 8, m– y mxy± my-
0≤–=
YbTσb WYb– 0≤
Yb
1 1 . . 1– 1– . .
. . 1 1 . . 1– 1–
1 1– 1 1– 1 1– 1 1–
=
WYbT
mx+
mx+
my+
my+
mx-
mx-
my-
my-
=
nxy
(a) (b)
mxy
qxmx
nx nxy qy
ny
mymxy
mx
d------
nx
2-----+
mxy
d--------
nxy
2-------+
my
d------
ny
2-----+qx
qy
my
d------–
ny
2-----+
mxy
d--------–
nxy
2-------+mx
d------–
nx
2-----+h
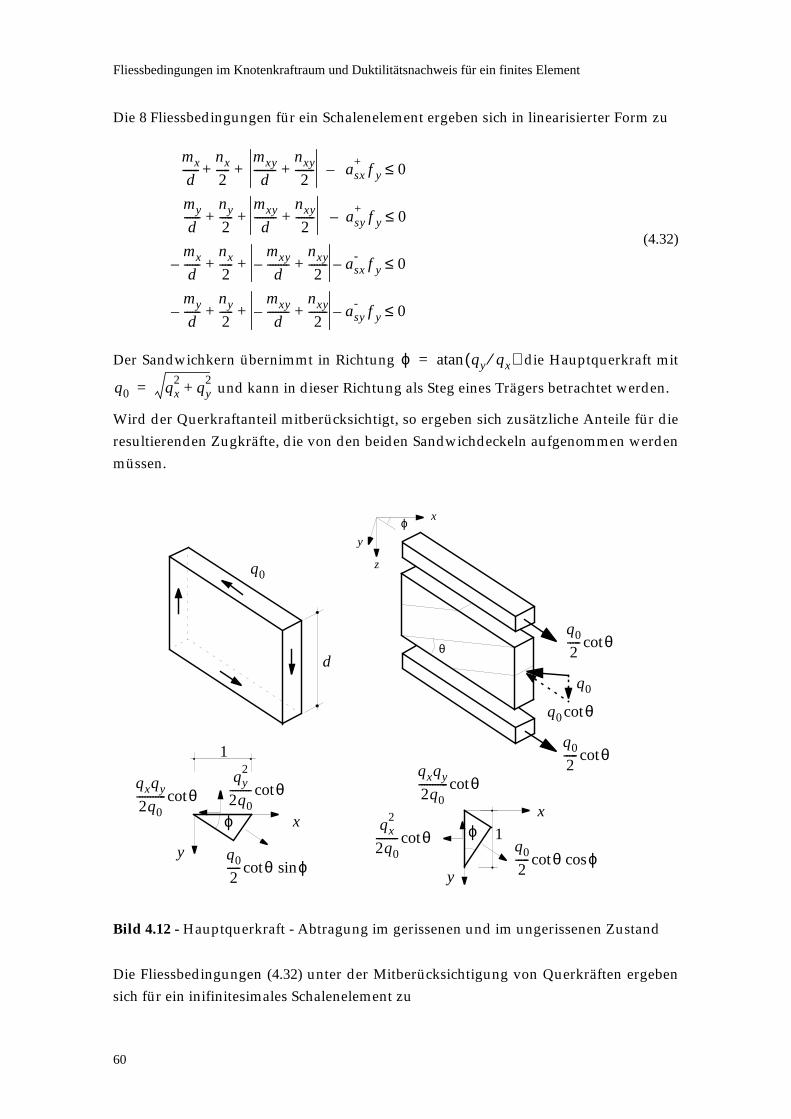
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
60
Die 8 Fliessbedingungen für ein Schalenelement ergeben sich in linearisierter Form zu
(4.32)
Der Sandwichkern übernimmt in Richtung die Hauptquerkraft mit
und kann in dieser Richtung als Steg eines Trägers betrachtet werden.
Wird der Querkraftanteil mitberücksichtigt, so ergeben sich zusätzliche Anteile für die
resultierenden Zugkräfte, die von den beiden Sandwichdeckeln aufgenommen werden
müssen.
Bild 4.12 - Hauptquerkraft - Abtragung im gerissenen und im ungerissenen Zustand
Die Fliessbedingungen (4.32) unter der Mitberücksichtigung von Querkräften ergeben
sich für ein inifinitesimales Schalenelement zu
mx
d------
nx
2-----
mxy
d--------
nxy
2-------+ asx
+f y 0≤–+ +
my
d------
ny
2-----
mxy
d--------
nxy
2-------+ asy
+f y 0≤–+ +
mx
d------–
nx
2-----
mxy
d--------–
nxy
2-------+ asx
-f y 0≤–+ +
my
d------–
ny
2-----
mxy
d--------–
nxy
2-------+ asy
-f y 0≤–+ +
ϕ qy qx⁄( )atan=
q0 qx2
qy2
+=
qxqy
2q0----------- θcot
qy2
2q0-------- θcot
θ
ϕ x
y
z
d
q0
q0
2----- θcot
q0
q0 θcot
q0
2----- θcot1
ϕ
q0
2----- θ ϕsincot
1qx
2
2q0-------- θcot
qxqy
2q0----------- θcot
q0
2----- θ ϕcoscot
ϕx
y
x
y

Linearisierung der Fliessbedingungen
61
(4.33)
Mit bezeichnet man den Hebelarm der Membrankräfte in den Sandwichdeckeln, mit
die Neigung der Betondruckstreben im Kern. Einfachheitshalber setzt man zu 45
und (4.33) wird zu
(4.34)
Die Schubbewehrung für die Abtragung der Hauptquerkraft ergibt sich zu
bzw. mit (4.35)
Falls die nominelle Schubspannung aus im Kern einen bestimmten Wert , z.B. den
rechnerischen Schubwiderstand nach SIA 162 (Sia [26]) nicht überschreitet, so
kann auf eine Schubbewehrung verzichtet werden und wird zu Null. In den Bezie-
hungen (4.33) bzw. (4.34) entfallen dann die Terme mit und mit .
Die Schubbewehrung in Platten ist immer aufwendig zu verlegen. Daher sollte die Plat-
tendicke immer so gewählt werden, dass auf eine Schubbewehrung verzichtet werden
kann.
mx
d------
nx
2-----
qx2
2q0-------- θcot
mxy
d--------
nxy
2-------
qxqy
2q0----------- θcot+ + asx
+f y 0≤–+ + +
my
d------
ny
2-----
qy2
2q0-------- θcot
mxy
d--------
nxy
2-------
qxqy
2q0----------- θcot+ + asy
+f y 0≤–+ + +
mx
d------–
nx
2-----
qx2
2q0-------- θcot
mxy
d--------–
nxy
2-------
qxqy
2q0----------- θcot+ + asx
-f y 0≤–+ + +
my
d------–
ny
2-----
qy2
2q0-------- θcot
mxy
d--------–
nxy
2-------
qxqy
2q0----------- θcot+ + asy
-f y 0≤–+ + +
dθ θ °
mx
d------
nx
2-----
qx2
2q0--------
mxy
d--------
nxy
2-------
qxqy
2q0-----------+ + asx
+f y 0≤–+ + +
my
d------
ny
2-----
qy2
2q0--------
mxy
d--------
nxy
2-------
qxqy
2q0-----------+ + asy
+f y 0≤–+ + +
mx
d------–
nx
2-----
qx2
2q0--------
mxy
d--------–
nxy
2-------
qxqy
2q0-----------+ + asx
-f y 0≤–+ + +
my
d------–
ny
2-----
qy2
2q0--------
mxy
d--------–
nxy
2-------
qxqy
2q0-----------+ + asy
-f y 0≤–+ + +
asq
q0
d f y--------- θtan= θ 45°= asq
q0
d f y---------=
q0 d⁄τc red,
asqqx qy

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
62
4.3 Fliessbedingungen für Platten und Schalen imKnotenkraftraum
4.3.1 Verallgemeinerte Grössen
Im Kapitel 4.1.1 wurden die Fliessbedingungen im Unterraum für verallgemeinerte
Grössen formuliert. Werden die tatsächlichen Verzerrungen durch eine Linearkombi-
nation von unabhängigen Verzerrungszuständen ausgedrückt, so stellen diese ei-
nen speziellen Unterraum im Funktionenraum dar. Die dazugehörigen
Amplitudenwerte werden als verallgemeinerte Verzerrungen bezeichnet. Fasst man
die speziellen Verzerrungszustände zur Matrix und die dazugehörigen Amplituden-
werte zum Vektor zusammen, so lässt sich für
(4.36)
anschreiben. Diese Überlegungen haben auch für plastische Verzerrungen ihre Gültig-
keit. Drückt man nun die Dissipationsarbeit über die verallgemeinerten Verzerrungen
aus, so ergibt sich
(4.37)
wobei
(4.38)
die zu den verallgemeinerten Verzerrungen arbeitsassoziierten verallgemeinerten Span-
nungen sind.
Die Verwendung von speziellen, linear unabhängigen Verzerrungszuständen
entspricht einer Restriktion der Systemdeformationen auf Freiheitsgrade. Der tat-
sächliche aplastische Bereich wird dabei durch eine orthogonale Projektion auf einen
- dimensionalen Unterraum abgebildet. Bei dieser Projektion gehen Freiheitsgrade des
Systems verloren, da die entsprechenden Spannungen mit den betrachteten Verzer-
rungszuständen keine Arbeit leisten. Betrachtet man zum Beispiel die Querkräfte in Ver-
bindung mit der Hypothese nach Bernoulli, so sind diese zwar für das Gleichgewicht
notwendig, tragen aber wie innere Kräfte starrer Körper nicht zur Dissipationsarbeit bei,
da bei ihnen die zugeordneten Verformungen fehlen.
εms Ei
qiE
q
ε Eiqi E q=i 1=
ms
∑=
dD σT Ei qpii 1=
ms
∑
V σTEi VdV∫
i 1=
ms
∑=d qpi Si qpi STqp=i 1=
ms
∑=V∫=
Si EiTσ Vd
V∫=
ms Eims
ms

Fliessbedingungen für Platten und Schalen im Knotenkraftraum
63
4.3.2 Der Knotenkraftraum
Die konzentrierten Knotenkräfte eines Elementes können auch als äussere Belastun-
gen aufgefasst werden, die nach dem Prinzip der virtuellen Verschiebungen statisch
äquivalent mit dem Spannungszustand innerhalb eines Elementes sind
(4.39)
In (4.39) beschreibt den Spannungszustand innerhalb eines Elementes mit seinem Vo-
lumen . Nun können auch die Elementknotenkräfte eines finiten Elementes als ver-
allgemeinerte Belastung aufgefasst werden, d.h. die Belastung eines Elementes kann
durch eine endliche Anzahl von Knotenkraftkombinationen beschrieben werden. Dem-
entsprechend können nun die Knotenverschiebungen wegen ihrer Assoziation zu den
Knotenkräften als verallgemeinerte Verschiebungen betrachtet werden. Die Betrach-
tung von verallgemeinerten Verschiebungen und Belastungen geht auf Prager [25] zu-
rück und stellt eine Erweiterung des plastischen Potentials dar. Aus diesen
Überlegungen lassen sich nun die Fliessbedingungen eines finiten Elementes auch im
Raum der Knotenkräfte formulieren
(4.40)
bzw. die plastischen Knotenverschiebungsinkremente aus dem assoziiertem Fliessge-
setz nach (4.10) mit
(4.41)
Die Formulierung der Fliessbedingungen im Knotenkraftraum räumt einige Nachteile
gegenüber der Formulierung im Spannungsraum aus. Im Gegensatz zu den Verschie-
bungen verlaufen die Spannungen diskontinuierlich über die Elementgrenzen hinweg.
Wird unter anderem noch eine grobe finite Elementidealisierung gewählt, so können die
Spannungen zweier benachbarter Elemente an den Elementrändern erhebliche Unter-
schiede aufweisen. Diese Spannungsunterschiede nehmen aber mit zunehmender Ver-
feinerung ab. Ausserdem werden die ausgewiesenen Spannungen an den
Elementknoten zumeist aus der einfachen Mittelwertbildung der Spannungswerte aller
angrenzenden Elemente am Knoten gebildet. Zudem können noch Spannungskonzen-
trationen auftreten, die mit zunehmender Idealisierung gegen unendlich streben, wie
z.B. Singularitäten unter Einzellasten, Punktlagern. Im Gegensatz dazu sind die Ele-
mentknotenkräfte mit den äusseren Knotenlasten exakt im Gleichgewicht - da ja das
Gleichungssystem danach gelöst wurde.
Diese Elementknotenkräfte errechnen sich aus der Multiplikation der lokalen Steifig-
keitsmatrix mit den Knotenverschiebungen (siehe (2.13))
bzw. (4.42)
p
σ
δaT p δεTσ VdV∫=
σV p
ap
Φ p( ) 0≤
api
∂Φk p( )∂ pi
------------------- λk
k 1=
n
∑=λk 0 falls Φk p( ) 0<=
λk 0 falls Φk p( ) 0=≥
pk a
p k a= p k a ap–( )=

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
64
wobei die plastischen Knotenverschiebungen ermittelt nach (4.41) darstellt. Sie bil-
den einen - dimensionalen Raum. Dabei bezeichnet die Anzahl der
Knoten und die Anzahl der Freiheitsgrade eines Knotens. Diese Knotenkräfte erfül-
len a priori Gleichgewichtsbedingungen, womit sich ihr Raum auf re-
duziert, was auch dem Rang von entspricht.
Bild 4.13 - Knotenkräfte, gezeigt am Beispiel eines finiten Plattenelementes im lokalen
kartesischen , , - Koordinatensystem
Bild 4.13 zeigt z.B. ein finites Plattenelement im dimensio-
nalen Knotenkraftraum. Da diese Knotenkräfte Gleichgewichtsbedingungen
erfüllen, reduziert sich ihr Raum auf die Dimension , was
auch dem Rang der lokalen Plattensteifigkeitsmatrix entspricht.
Um aufgrund der Knotenkräfte bemessen zu können, müssen die Fliessbedingungen
im - dimensionalen Raum aufgestellt werden. Die Herleitung der Fliessbedin-
gungen im - dimensionalen Raum wäre aufwendig. Zur Vereinfachung des Pro-
blems wird eine reduzierte Anzahl von verallgemeinerten Spannungen (Verzerrungen)
verwendet und für diese die Fliessbedingungen aufgestellt.
In den folgenden beiden Kapiteln wird die nichttriviale Herleitung der linearisierten
Fliessbedingungen im Knotenkraftraum gezeigt.
4.3.3 Fliessbedingungen für Platten im Knotenkraftraum
Drückt man die Verzerrungen
(4.43)
von Platten nach (4.36) über Verzerrungszustände und mit als verallge-
meinerte Verzerrungen aus, so können die Verzerrungszustände in einem lokalen, ele-
mentbezogenen , - Koordinatensystem folgendermassen dargestellt werden
apmd mn mf= mn
mfmg mr m= d mg–
k
ξ
ηζ
pb
pb kbab=mη
mξ
pζ
ξ η ζ
md mn mf 4 3⋅ 12= = =mg 3=
mr md mg– 12 3– 9= = =
Φ p( ) mrmr
ms
εb Eb qb=
ms 7= Eb qb
ξ η
Fliessbedingungen für Platten und Schalen im Knotenkraftraum
65
(4.44)
Dabei bezeichnen
und (4.45)
die konstanten bzw. höheren Verzerrungszustände. Der Index steht für Biegung,
steht für konstante, für höhere Zustände. Mit bezeichnet man die Verzerrungs-
komponente für den Verzerrungszustand (Mode) . Unter Anwendung der linearen
Operatormatrix gilt für Platten nach (3.31) die Beziehung
(4.46)
Die Verschiebungszustände, die diese Verzerrungen erzeugen, werden zu einer Matrix
zusammengefasst
(4.47)
Mit
und (4.48)
werden die zu den konstanten bzw. höheren Verzerrungszuständen zugehörigen Ver-
schiebungszustände bezeichnet. Die ersten beiden Zeilen von stellen die jeweiligen
Rotationen und , die dritte Zeile die Verschiebung dar. Diese drei Verfor-
mungsgrössen entsprechen den Elementknotenverschiebungsparametern. Bild (4.14)
zeigt die Verformungszustände für ein Plattenelement.
Eb Ebk Ebh[ ]
χξ
χη
χξη 1 . . ξ . η .
. 1 . . η . ξ
. . 1 . . 2ξ 2η
= = =
Ebk
1 . .
. 1 .
. . 1
= Ebh
ξ . η .
. η . ξ
. . 2ξ 2η
=
b kh Ebij
i jLb
Ebi Lb Ubi=
Ub
Ub Ubk Ubh[ ]
θξ
θη
w
∂w∂η-------
∂w∂ξ-------–
w . η ξ
2--- .
η2
2------ ξ2
2----- ξη
ξ– . η2---– ξ2
2-----– . ξη–
η2
2------
ξ2
2----- η2
2------ ξη
2------ ξ3
6----- η3
6------ ξ2η
2--------- ξη2
2---------
= = = =
Ubk
. η ξ2---
ξ– . η2---–
ξ2
2----- η2
2------ ξη
2------
= Ubh
.η2
2------ ξ2
2----- ξη
ξ2
2-----– . ξη–
η2
2------
ξ3
6----- η3
6------ ξ2η
2--------- ξη2
2---------
=
Ubθξ θη w
ms 7=
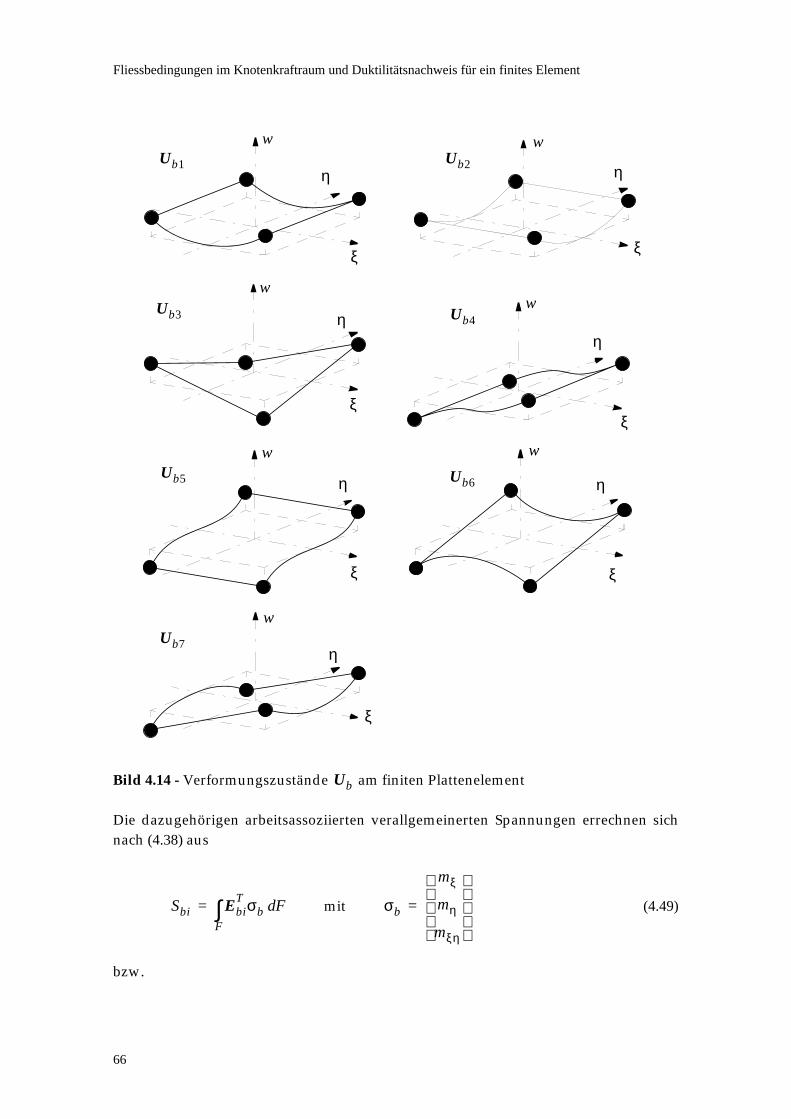
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
66
Bild 4.14 - Verformungszustände am finiten Plattenelement
Die dazugehörigen arbeitsassoziierten verallgemeinerten Spannungen errechnen sich
nach (4.38) aus
mit (4.49)
bzw.
ξξ
η
w
ξ
η
w
ξ
η
w
ξ
η
w
ξ
η
w
ξ
η
w
ξ
η
w
Ub1Ub1 Ub2
Ub3 Ub4
Ub5 Ub6
Ub7
Ub
Sbi EbiT σb Fd
F∫= σb
mξ
mη
mξη
=

Fliessbedingungen für Platten und Schalen im Knotenkraftraum
67
(4.50)
(4.51)
(4.52)
Setzt man nun für jeden Elementknoten seine Koordinaten und in die Matrix der
Verschiebungszustände ein und fasst man diese 3x7 Untermatrizen für jeden Knoten
i zu einer Matrix zusammen, so ergibt sich diese zu
mit (4.53)
Mit der Analogie zu nach (2.4) lassen sich die Verzerrungszustände auch
durch die entsprechenden Knotenverschiebungen mit
(4.54)
ausdrücken. Die verallgemeinerten Spannungen können mit Hilfe von (2.10) und
(4.54) direkt aus den Beziehungen
(4.55)
errechnet werden und sind somit eine Funktion der Elementknotenkräfte . Für das
Aufstellen der linearisierten Fliessbedingungen muss eine direkte Beziehung zwischen
den unbekannten Spannungen im Element und den verallgemeinerten Spannungs-
grössen aufgestellt werden.
Nach dem unteren Grenzwertsatz der Plastizitätstheorie wird ein statisch zulässiger
Spannungszustand gewählt und für diesen die Fliessbedingungen formuliert: Das
Element wird zunächst durch sein lokales , - Koordinatensystem mit Ursprung im
Elementschwerpunkt in vier Quadranten geteilt (Bild 4.15). Für jeden dieser Quadranten
wird ein konstantes Spannungsfeld eingeführt. Mit Hilfe des Prinzips der virtuellen
Verschiebungen wird mit der Arbeitsgleichung
(4.56)
die statische Äquivalenz zwischen den verallgemeinerten Spannungen und dem
Spannungsfeld hergestellt. Zwischen den Nachbarszonen A - B bzw. A - C in den vier
Quadranten können Diskontinuitäten vorliegen, die aber das Gleichgewicht nicht verlet-
zen. Die , - Beziehung lässt sich nun wie folgt ausdrücken
Sb1 mξ Fd∫= Sb2 mη Fd∫= Sb3 mζη Fd∫=
Sb4 ξmξ Fd∫= Sb5 ηmη Fd∫=
Sb6 ηmξ 2ξmξη+( ) Fd∫= Sb7 ξmη 2ηmξη+( ) Fd∫=
ξ ηUb
Ub
Ub
Ub ξi ηi,( )
.
Ub ξmnηmn
,( )
= i 1…mn=
ε B a= EbUb
Eb Bb Ub=
Sb
Sb EbTσb F Ub
TBb
Tσb F UbT
pb=dF∫=d∫=
pb
σbSb
σbξ η
σb
δqbiT
Sbi δqbiT Ebi
T σb F δqbiT Ebi
T σb Fd∫=d∫ δqbiT Ubi
Tpb= =
und Sbi UbiT
pb EbiT σb Fd∫= =
Sbiσb
σb Sb
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
68
(4.57)
Dabei bezeichnet die Elementquerschnittsfläche und , die statischen Momente
um die jeweiligen Achsen
(4.58)
Für jeden dieser Quadranten wird aus dem entsprechenden Vorzeichen ermittelt
(Bild 4.15).
Die linearisierten Fliessbedingungen aus (4.28) für ein infinitesimales Plattenelement
werden nun ins lokale , - Koordinatensystem übertragen und ergeben sich für die
untere Bewehrungslage zu
(4.59)
und für die obere Bewehrungslage zu
(4.60)
Die konstanten Spannungszustände in den vier Quadranten müssen nun diese Fliessbe-
dingungen erfüllen.
Setzt man nun die Komponenten , und aus nach (4.57) in (4.59) bzw.
(4.60) ein, so ergeben sich die Fliessbedingungen für die Plattenunterseite zu
(4.61)
und für die Plattenoberseite zu
(4.62)
Die Ausdrücke , und repräsentieren Mittelwerte der tatsächlichen
Spannungen , und über die Elementfläche , während die zusätzlichen Ter-
me , und , den Übergang von infinitesimalen Element zum finiten Ele-
ment kennzeichnen. Wertet man diese Fliesbedingungen für alle vier Quadranten aus
σb
mξ
mη
mξη
1F--- . .
1Sη-----± . . .
.1F--- . .
1Sξ-----± . .
. .1F--- . .
12Sη---------± 1
2Sξ--------±
Sb1
Sb2
Sb3
Sb4
Sb5
Sb6
Sb7
= =
F Sξ Sη
Sξ η Fd∫= Sη ξ Fd∫=
σb
ξ η
mξ mξη mξ+≤+ mη mξη mη
+≤+
mξ mξη mξ-≤+– mη mξη mη
-≤+–
mξ mη mξη σb
Sb1
F--------
Sb3
F--------
Sb4
Sη--------
Sb6
2Sη--------- mξ
+≤±±±Sb2
F--------
Sb3
F--------
Sb5
Sξ--------
Sb7
2Sξ-------- mη
+≤±±±
Sb1
F--------
Sb3
F--------
Sb4
Sη--------
Sb6
2Sη--------- mξ
-≤±±±–Sb2
F--------–
Sb3
F--------
Sb5
Sξ--------
Sb7
2Sξ-------- mη
-≤±±±
Sb1 F⁄ Sb2 F⁄ Sb3 F⁄mξ mη mξη F
Sb4 Sb5 Sb6 Sb7
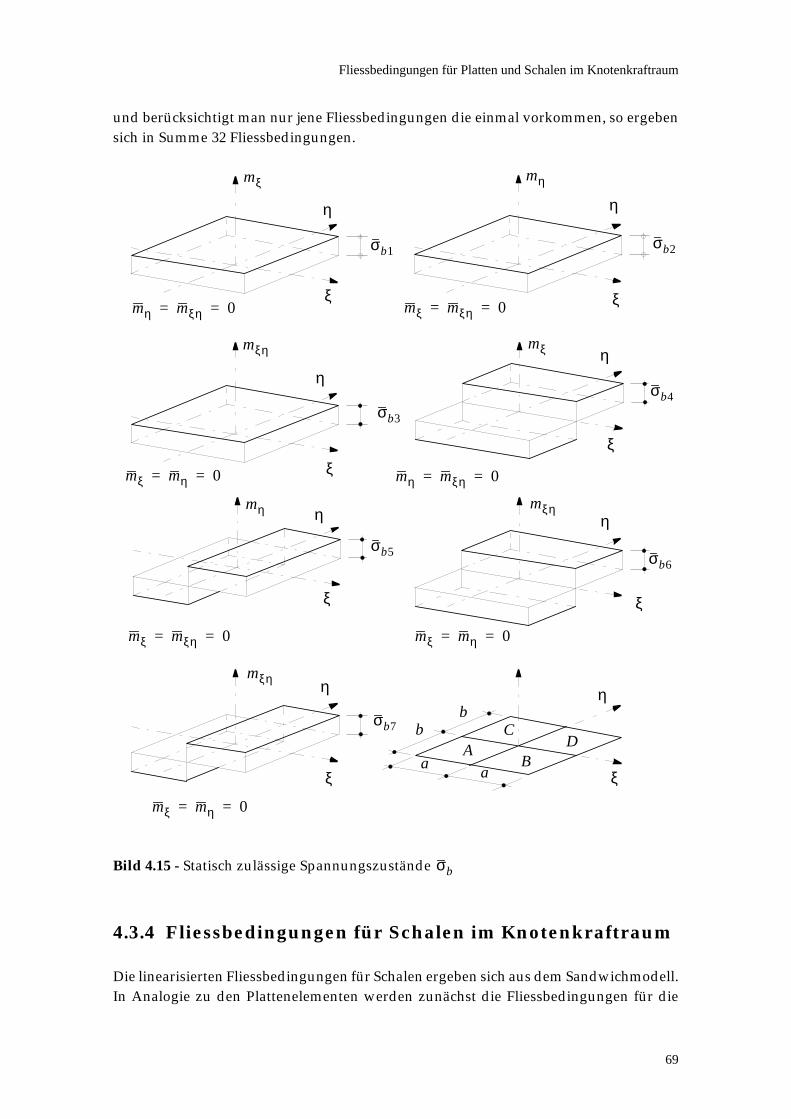
Fliessbedingungen für Platten und Schalen im Knotenkraftraum
69
und berücksichtigt man nur jene Fliessbedingungen die einmal vorkommen, so ergeben
sich in Summe 32 Fliessbedingungen.
Bild 4.15 - Statisch zulässige Spannungszustände
4.3.4 Fliessbedingungen für Schalen im Knotenkraftraum
Die linearisierten Fliessbedingungen für Schalen ergeben sich aus dem Sandwichmodell.
In Analogie zu den Plattenelementen werden zunächst die Fliessbedingungen für die
ξ
η
mξ
σb1 σb2
ξ
η
mη
ξ
η
σb3
mξη
ξ
ηmξ
σb4
σb5
ξ
ηmη
σb6
σb7
ξ
η
AB
CD
ξ
η
aa
bb
mξη
mξη
ξ
η
mη mξη 0= = mξ mξη 0= =
mξ mη 0= = mη mξη 0= =
mξ mξη 0= = mξ mη 0= =
mξ mη 0= =
σb

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
70
Membranelemente hergeleitet. Zusammen mit den linearisierten Fliessbedingungen für
die Biegung werden diese zu den Fliessbedingungen für Schalen kombiniert.
Dückt man die Membranverzerrungen (vgl. (3.38))
(4.63)
von Scheiben nach (4.36) über Verzerrungszustände und mit als verall-
gemeinerte Verzerrungen aus, so können die Verzerrungszustände in einem lokalen,
elementbezogenen , - Koordinatensystem folgendermassen dargestellt werden
(4.64)
Dabei bezeichnen
und (4.65)
die konstanten bzw. höheren Verzerrungszustände. Der Index steht für Membran,
für konstante Moden und für höhere Moden. Die Knotenverschiebungen eines finiten
Scheibenelementes, die diese Verzerrungen erzeugen, können wiederum mit Hilfe der
Operatormatrix nach (3.38) aus der Beziehung
(4.66)
ermittelt werden. Die Knotenfreiheitsgrade eines Membranelementes ergeben sich zu
(4.67)
εm Em qm=
ms 5= Em qm
ξ η
Em Emk Emh[ ]
εξ
εη
γ ξη
∂u∂ξ------
∂v∂η------
∂u∂η------ ∂v
∂ξ------+
1 . . η .
. 1 . . ξ
. . 1 . .
= = = =
Emk
1 . .
. 1 .
. . 1
= Emh
η .
. ξ
. .
=
m kh
Lm
Emi LmUmi=
UmUmk
d Umhd
Umkr Umh
r
u
v
θζ ξ .
η2--- ξη η2
2------–
. η ξ2--- ξ2
2-----– ξη
. . . ξ– η
= = =
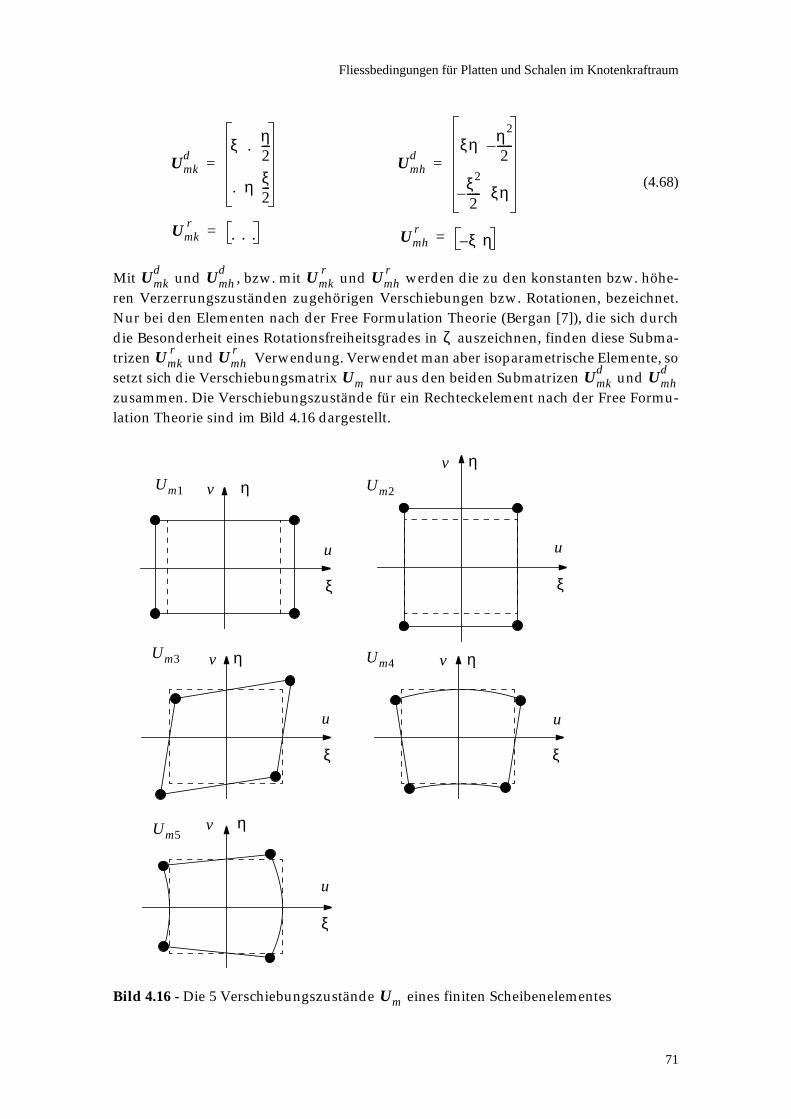
Fliessbedingungen für Platten und Schalen im Knotenkraftraum
71
(4.68)
Mit und , bzw. mit und werden die zu den konstanten bzw. höhe-
ren Verzerrungszuständen zugehörigen Verschiebungen bzw. Rotationen, bezeichnet.
Nur bei den Elementen nach der Free Formulation Theorie (Bergan [7]), die sich durch
die Besonderheit eines Rotationsfreiheitsgrades in auszeichnen, finden diese Subma-
trizen und Verwendung. Verwendet man aber isoparametrische Elemente, so
setzt sich die Verschiebungsmatrix nur aus den beiden Submatrizen und
zusammen. Die Verschiebungszustände für ein Rechteckelement nach der Free Formu-
lation Theorie sind im Bild 4.16 dargestellt.
Bild 4.16 - Die 5 Verschiebungszustände eines finiten Scheibenelementes
Umkd
ξ .η2---
. η ξ2---
=
Umkr
. . .=
Umhd
ξη η2
2------–
ξ2
2-----– ξη
=
Umhr
ξ– η=
Umkd Umh
d Umkr Umh
r
ζUmk
r Umhr
Um Umkd Umh
d
ξ
η
ξ
η
ξ
η
ξ
η
ξ
η
Um1 Um2
Um3 Um4
Um5
u
v
u
v
u
v
u
v
u
v
Um
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
72
Die dazugehörigen verallgemeinerten Spannungen sind gegeben durch
mit (4.69)
bzw.
(4.70)
(4.71)
Die Berechnung der verallgemeinerten Spannungen in (4.70) und (4.71) basiert auch auf
(4.38). Die 3 x 5 Matrix ermittelt sich für jeden Elementknoten durch Einsetzen sei-
ner Koordinaten in (4.67). Diese Untermatrizen werden dann schliesslich wieder zur Ma-
trix zusammengefasst.
mit (4.72)
Nun können wiederum die verallgemeinerten Spannungen nach (4.55) durch Multipli-
kation von mit den Elementknotenkräften ermittelt werden
(4.73)
Das statisch zulässige Spannungsfeld wird auf folgende Art und Weise gewählt: Das
Element wird durch sein lokales , - Koordinatensystem mit Ursprung im Element-
schwerpunkt in vier Quadranten geteilt (Bild 4.17). Für jeden dieser Quadranten wird
ein konstantes Spannungsfeld für , und eingeführt. Aus dem Prinzip der
virtuellen Arbeiten, analog zu (4.56), wird die statische Äquivalenz zwischen den verall-
gemeinerten Spannungen und dem Spannungsfeld abgeleitet. Es ergibt sich
nun folgende Beziehung zwischen dem statisch zulässigen Spannungsfeld und den ver-
allgemeinerten Spannungen
(4.74)
Smi EmiT σm Fd∫= σm
nξ
nη
nξη
=
Sm1 nξ FdF∫= Sm2 nη Fd
F∫= Sm3 nξη Fd
F∫=
Sm4 ηnξ FdF∫= Sm5 ξnη Fd
F∫=
Um i
Um
Um
Um ξi ηi,( )
.
Um ξmnηmn
,( )= i 1…mn=
Um pm
Sm UmT
pm=
σmξ η
σm nξ nη nξη
Smi σmi
σm
nξ
nη
nξη
1F--- . .
1Sξ-----± .
.1F--- . .
1Sη-----±
. .1F--- . .
Sm1
Sm2
Sm3
Sm4
Sm5
= =

Fliessbedingungen für Platten und Schalen im Knotenkraftraum
73
Die statisch zulässigen Spannungszustände sind im Bild (4.17) dargestellt.
Bild 4.17 - Verallgemeinerte Spannungen für ein finites Scheibenelement
Die statischen Momente und errechnen sich analog zu (4.58) mit
(4.75)
Für jeden dieser Quadranten wird der entsprechende Spannungszustand ermittelt. Die
Fliessbedingungen für ein infinitesimales Scheibenelement im lokalen , - Koordina-
tensystem ergeben sich zu
(4.76)
(4.77)
ξ
η
ξ
ησm2
ξ
ησm3
ξ
ησm4
ξ
ησm5
AB
CD
ξ
η
aa
bb
nη nξη 0= =nξ nξη 0= =
nξ nη 0= = nη nξη 0= =
nξ nξη 0= =
nξ
σm1
nη
nξηnξ
nη
Sξ Sη
Sξ η Fd∫= Sη ξ Fd∫=
ξ η
nξ nξη r sξ+≤± nη nξη r sη
+≤±
nξ nξη r c≤±– nη nξη r c≤±–

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
74
(4.78)
Von den zehn Ungleichungen kontrollieren vier die Bewehrung und sechs den Beton.
Die konstanten Spannungszustände in jedem der vier Quadranten müssen die Fliessbe-
dingungen (4.76) bis (4.78) erfüllen. Für den Fall eines rechteckigen Elementes ergeben
sich daraus 40 Ungleichungen, die sich aber auf 18 reduzieren lassen, weil bestimmte
Ungleichungen in den einzelnen Quadranten identisch sind.
(4.79)
(4.80)
(4.81)
Der Übergang der Fliessbedingungen vom infintesimalen zum finiten Element erfolgt
analog wie bei den Plattenelementen beschrieben.
Bereits im Abschnitt 4.2 wurde gezeigt wie sich die Fliessbedingungen für Membran-
und Biegebeanspruchung aufstellen lassen. Dabei wird mit Hilfe des Sandwichmodells
die Aufteilung der Kräfte vorgenommen. Die linearisierten Fliessbedingungen für kom-
binierte Beanspruchung im lokalen , - Koordinatensystem ergeben sich für die un-
tere Bewehrungslage zu
(4.82)
und für die obere Bewehrungslage zu
(4.83)
Ausgedrückt in Funktion der verallgemeinerten Biegespannungen bis und der
verallgemeinerten Membranspannungen bis lassen sich die Gleichungen in
(4.82) und (4.83) noch anschreiben
2nξη r c≤±
Sm1
F---------
Sm3
F---------
Sm4
Sξ--------- r sξ
+≤±±Sm2
F---------
Sm3
F---------
Sm5
Sη--------- r sη
+≤±±
Sm1
F---------
Sm3
F---------
Sm4
Sξ--------- r c≤±±–
Sm2
F---------
Sm3
F---------
Sm5
Sη--------- r c≤±±–
2Sm3
F--------- r c≤±
ξ η
mξd
------nξ2-----
mξηd
---------nξη2
--------+ r sξ+≤+ +
mηd
-------nη2-----
mξηd
---------nξη2
--------+ r sη+≤+ +
mξd
------–nξ2-----
mξηd
---------–nξη2
--------+ r sξ-≤+ +
mηd
-------–nη2-----
mξηd
---------–nξη2
--------+ r sη-≤+ +
Sb1 Sb7Sm1 Sm5

Fliessbedingungen für Platten und Schalen im Knotenkraftraum
75
(4.84)
Die ersten beiden Ungleichungen betreffen die untere, die letzten beiden die obere Be-
wehrungslage im Sandwichdeckel. In Summe ergeben sich 64 linearisierte Fliessbedin-
gungen für ein rechteckiges finites Schalenelement.
4.3.5 Linearisierte Fliessbedingungen fürDreieckelemente
Für die Behandlung von Dreieckelementen werden nur die konstanten Verzerrungszu-
stände mit ihren dazugehörigen verallgemeinerten Spannungen benötigt. Die verallge-
meinerten Spannungen für Platten und Scheiben lassen sich mit
(4.85)
angeben und die dazugehörigen linearisierten Fliessbedingungen für ein Plattenelement
ergeben sich für die Plattenunter- und oberseite zu
(4.86)
(4.87)
und für ein Membranelement zu
(4.88)
(4.89)
Sm1
2F---------
Sm4
2Sξ---------±
Sb1
dF--------
Sb4
dSη---------
Sb6
2dSη------------±±
Sm3
2F---------
Sb3
dF--------+
r sξ+≤±+
Sm2
2F---------
Sm5
2Sη---------±
Sb2
dF--------
Sb5
dSξ--------
Sb7
2dSξ------------±±
Sm3
2F---------
Sb3
dF--------+
r sη+≤±+
Sm1
2F---------
Sm4
2Sξ---------±
Sb1
dF--------
Sb4
dSη---------
Sb6
2dSη------------±±
–Sm3
2F---------
Sb3
dF--------–
r sξ-≤±
Sm2
2F---------
Sm5
2Sη---------±
Sb2
dF--------
Sb5
dSξ--------
Sb7
2dSξ------------±±
–Sm3
2F---------
Sb3
dF--------–
r sη-≤±
Sb
Sb1
Sb2
Sb3
= Sm
Sm1
Sm2
Sm3
=
Sb1
F--------
Sb3
F-------- mξ
+≤±Sb2
F--------
Sb3
F-------- mη
+≤±
Sb1
F--------
Sb3
F-------- mξ
-≤±–Sb2
F--------–
Sb3
F-------- mη
-≤±
Sm1
F---------
Sm3
F--------- r sξ
+≤±Sm2
F---------
Sm3
F--------- r sη
+≤±
Sm1
F---------
Sm3
F--------- r c≤±–
Sm2
F---------
Sm3
F--------- r c≤±–

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
76
(4.90)
Die linearisierten Fliessbedingungen entsprechen hier den Fliessbedingungen für ein
differentielles Element, bei denen anstelle der Spannungen , , bzw. , ,
ihre Mittelwerte über die Elementfläche eingesetzt werden. Für Schalenelemente
werden die linearisierten Fliessbedingungen wieder aus dem Sandwichmodell abgelei-
tet.
(4.91)
Die Anzahl der linearisierten Fliessbedingungen für dreieckige Schalenelemente ergibt
sich zu 8.
4.3.6 Querkraft
Sind Platten und Schalen einer hohen Querkraftbeanspruchung ausgesetzt, so kann es
zu einem schlagartigen Versagen der Strukturen kommen. Die Sprödigkeit des Bruches
verhindert eine Schnittgrössenumlagerung, die zu einer Entlastung in den hochbean-
spruchten Zonen führen würde. Will man den Schubeinfluss in die Berechnung mitein-
beziehen, so führt man zur Erfassung des Verzerrungszustandes die konstant
angenommenen Schiebungen und ein, mit den zwei zusätzlichen Verzerrungs-
zuständen und . Damit nimmt die Matrix der Verzerrungszustände nach
(4.44) folgende Gestalt an
(4.92)
wobei
2Sm3
F--------- r c≤±
mξ mη mξη nξ nηnξη F
Sm1
2F---------
Sb1
dF--------
Sm3
2F---------
Sb3
dF--------+
r sξ+≤±+
Sm2
2F---------
Sb2
dF--------
Sm3
2F---------
Sb3
dF--------+
r sη+≤±+
Sm1
2F---------
Sb1
dF--------–
Sm3
2F---------
Sb3
dF--------–
r sξ-≤±
Sm2
2F---------
Sb2
dF--------–
Sm3
2F---------
Sb3
dF--------–
r sη-≤±
εbγ ξζ γ ηζ
Eq1 Eq2 Eb
Eb Ebk Ebh Eq[ ]
χξ
χη
χξη
γ ξζ
γ ηζ
1 . . ξ . η . . .
. 1 . . η . ξ . .
. . 1 . . 2ξ 2η . .
. . . . . . . 1 .
. . . . . . . . 1
= = =
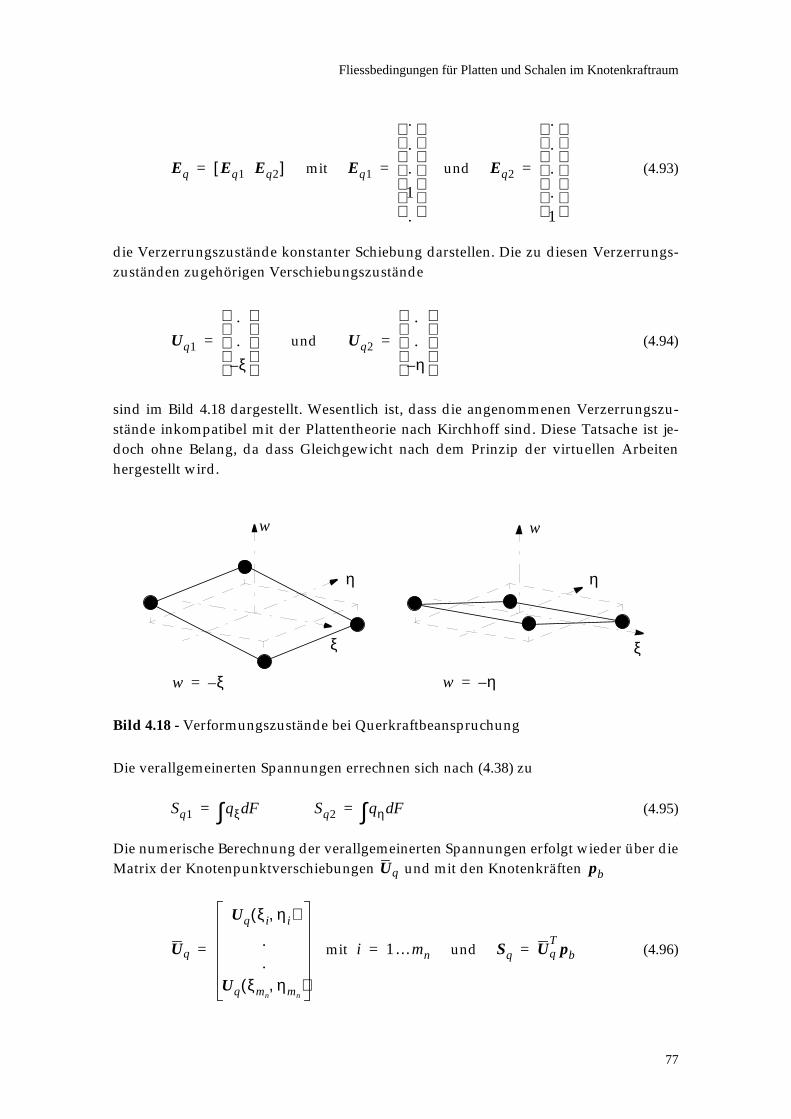
Fliessbedingungen für Platten und Schalen im Knotenkraftraum
77
mit und (4.93)
die Verzerrungszustände konstanter Schiebung darstellen. Die zu diesen Verzerrungs-
zuständen zugehörigen Verschiebungszustände
und (4.94)
sind im Bild 4.18 dargestellt. Wesentlich ist, dass die angenommenen Verzerrungszu-
stände inkompatibel mit der Plattentheorie nach Kirchhoff sind. Diese Tatsache ist je-
doch ohne Belang, da dass Gleichgewicht nach dem Prinzip der virtuellen Arbeiten
hergestellt wird.
Bild 4.18 - Verformungszustände bei Querkraftbeanspruchung
Die verallgemeinerten Spannungen errechnen sich nach (4.38) zu
(4.95)
Die numerische Berechnung der verallgemeinerten Spannungen erfolgt wieder über die
Matrix der Knotenpunktverschiebungen und mit den Knotenkräften
mit und (4.96)
Eq Eq1 Eq2[ ]= Eq1
.
.
.
1
.
= Eq2
.
.
.
.
1
=
Uq1
.
.
ξ–
= Uq2
.
.
η–
=
ξ
η
w
ξ
η
w
w ξ–= w η–=
Sq1 qξ Fd∫= Sq2 qη Fd∫=
Uq pb
Uq
Uq ξi ηi,( )
.
.
Uq ξmnηmn
,( )
= i 1…mn= Sq UqT
pb=
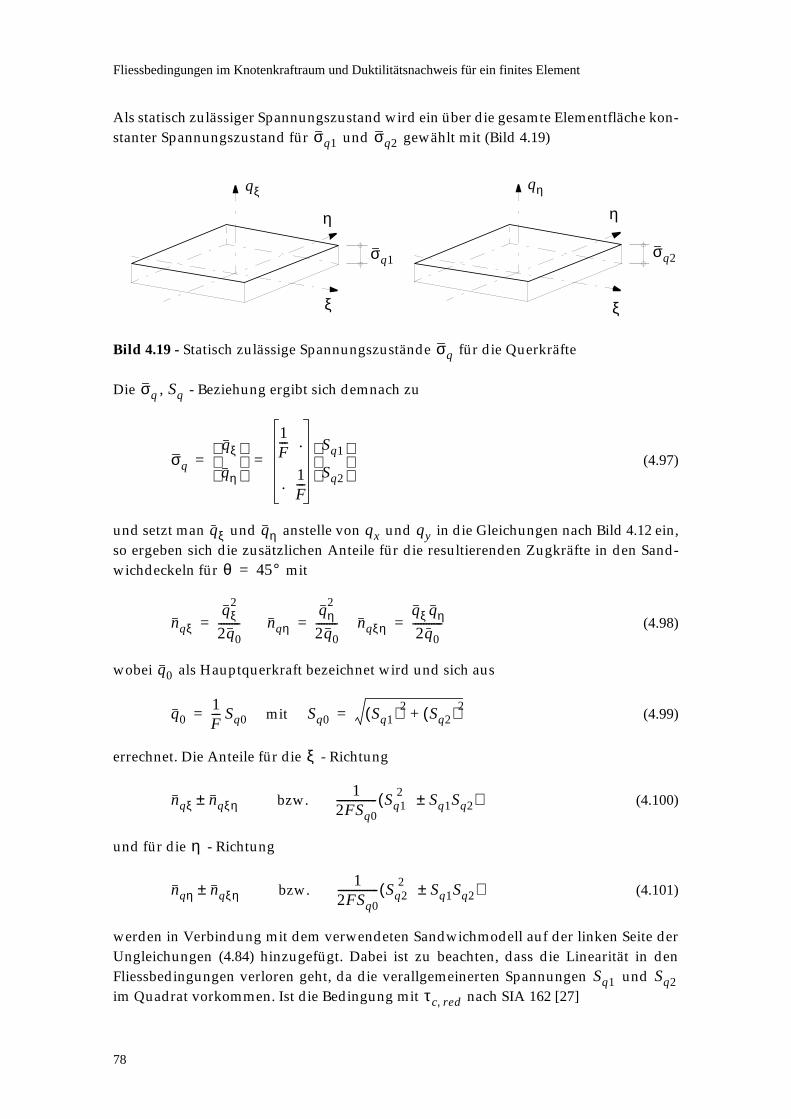
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
78
Als statisch zulässiger Spannungszustand wird ein über die gesamte Elementfläche kon-
stanter Spannungszustand für und gewählt mit (Bild 4.19)
Bild 4.19 - Statisch zulässige Spannungszustände für die Querkräfte
Die , - Beziehung ergibt sich demnach zu
(4.97)
und setzt man und anstelle von und in die Gleichungen nach Bild 4.12 ein,
so ergeben sich die zusätzlichen Anteile für die resultierenden Zugkräfte in den Sand-
wichdeckeln für mit
(4.98)
wobei als Hauptquerkraft bezeichnet wird und sich aus
mit (4.99)
errechnet. Die Anteile für die - Richtung
bzw. (4.100)
und für die - Richtung
bzw. (4.101)
werden in Verbindung mit dem verwendeten Sandwichmodell auf der linken Seite der
Ungleichungen (4.84) hinzugefügt. Dabei ist zu beachten, dass die Linearität in den
Fliessbedingungen verloren geht, da die verallgemeinerten Spannungen und
im Quadrat vorkommen. Ist die Bedingung mit nach SIA 162 [27]
σq1 σq2
ξ
η
qξ
σq1 σq2
ξ
η
qη
σq
σq Sq
σq
qξ
qη
1F--- .
.1F---
Sq1
Sq2
= =
qξ qη qx qy
θ 45°=
nqξqξ
2
2q0--------= nqη
qη2
2q0--------= nqξη
qξ qη2q0-----------=
q0
q01F--- Sq0= Sq0 Sq1( )2
Sq2( )2+=
ξ
nqξ nqξη± 12FSq0--------------- Sq1
2Sq1Sq2±( )
η
nqη nqξη± 12FSq0--------------- Sq2
2Sq1Sq2±( )
Sq1 Sq2τc red,

Plastische Widerstände aus den Bewehrungsfeldern
79
(4.102)
nicht erfüllt so errechnet sich die erforderliche Schubbewehrung aus (vgl. Seite 61)
(4.103)
4.4 Plastische Widerstände aus denBewehrungsfeldern
Die bereits definierten plastischen Widerstände sind nur gültig, wenn sich die orthogo-
nale Bewehrung in der lokalen , - Richtung des Elementes befindet. Im allgemeinen
befinden sich aber mehrere Bewehrungslagen in beliebigen Richtungen übereinander
(siehe Bild 4.20)
Bild 4.20 - Beliebige Bewehrungsrichtung von mehreren Bewehrungslagen
Unter der Annahme, dass in allen Bewehrungslagen die Fliessgrenze erreicht wird,
ergibt sich die Stahlspannung für eine unter dem Winkel zur lokalen - Achse
befindlichen Bewehrungslage zu
(4.104)
Der Widerstand der - ten schiefliegenden Bewehrung infolge Zugbeanspruchung
wird aus der Normalprojektion des Spannungsvektors auf die Aussennormalenvek-
q0
d----- τc red,≤
asq
q0
d f y---------=
ξ η
ξ
η
αi
αi 1+
f yσs α ξ
σs
nsξ
nsη
nsξη α2
cos
α2sin
α αcossin
as f y= =
i WYiσsi

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
80
toren (Aussennormalenvektoren weisen in Richtung der Normalspannungen auf
Zug) der Fliessebenen mit j = 1, 2, 3, 4 bestimmt
(4.105)
mit als - ter Bewehrungsfläche pro Einheitsbreite. Mit wird der Winkel der -
ten Bewehrungslage zur - Achse bezeichnet. Betrachtet man aber Bewehrungsla-
gen, so ergibt sich der totale plastische Widerstand einfach durch eine Aufsummation
der einzelnen Widerstände aus den Bewehrungsstäben.
Die linearisierten Fliessbedingungen im Knotenkraftraum ergeben sich nun allgemein
zu
(4.106)
oder mit zu
mit (4.107)
Alle bisher gezeigten Ableitungen und Formulierungen sind für allgemeine Viereck-
und Dreieckelemente gültig. Wesentlich dabei ist, dass durch die Linearisierung der
Fliessbedingungen die Invarianz gegenüber der Elementrichtung bzw. Bemessungsrich-
tung verloren geht. Diese Richtung sollte jedoch möglichst gut mit der Bewehrungsrich-
tung der eingelegten Bewehrung übereinstimmen, um eine hohe Ausnützung des
Bewehrungsstahls zu ermöglichen.
4.5 Maschenparameter
Die Beschränkung auf bestimmte Verzerrungszustände bei Platten- und Membranele-
menten führt dazu, dass der tatsächliche Verzerrungszustand eines Elementes nicht
vollständig beschrieben werden kann. Eine vollständige Erfassung aller Verzerrungszu-
stände führt zu einer weitaus komplizierteren Fliessfläche und im weiteren auch zu ei-
ner viel grösseren Anzahl von linearisierten Fliessbedingungen. Durch die Betrachtung
von Verzerrungzuständen ergibt sich ein - dimensionaler Unterraum vom
Knotenkraftraum mit der Dimension . Da die Knotenkräfte Gleichgewichts-
bedingungen erfüllen müssen, reduziert sich ihr Raum auf die Dimension
, was auch dem Rang der Steifigkeitsmatrix entspricht. Die daraus er-
mittelte linearisierte Fliessfläche kann als Projektion in einem - dimensionalen
Y jΦ j
WYi YTσsi
1 1 . .
. . 1 1
1 1– 1 1–
T
σsi
αi αi αicossin+2
cos
αi αi αicossin–2
cos
αi αi αicossin+2
sin
αi αi αicossin–2
sin
asi f y===
asi i αi iξ nr
YTS WY≤
S UT
p=
FT p WY≤ F U Y=
ms Ei ms RsRd md mg
Rrmr md mg–= k
Φ p( ) Rs
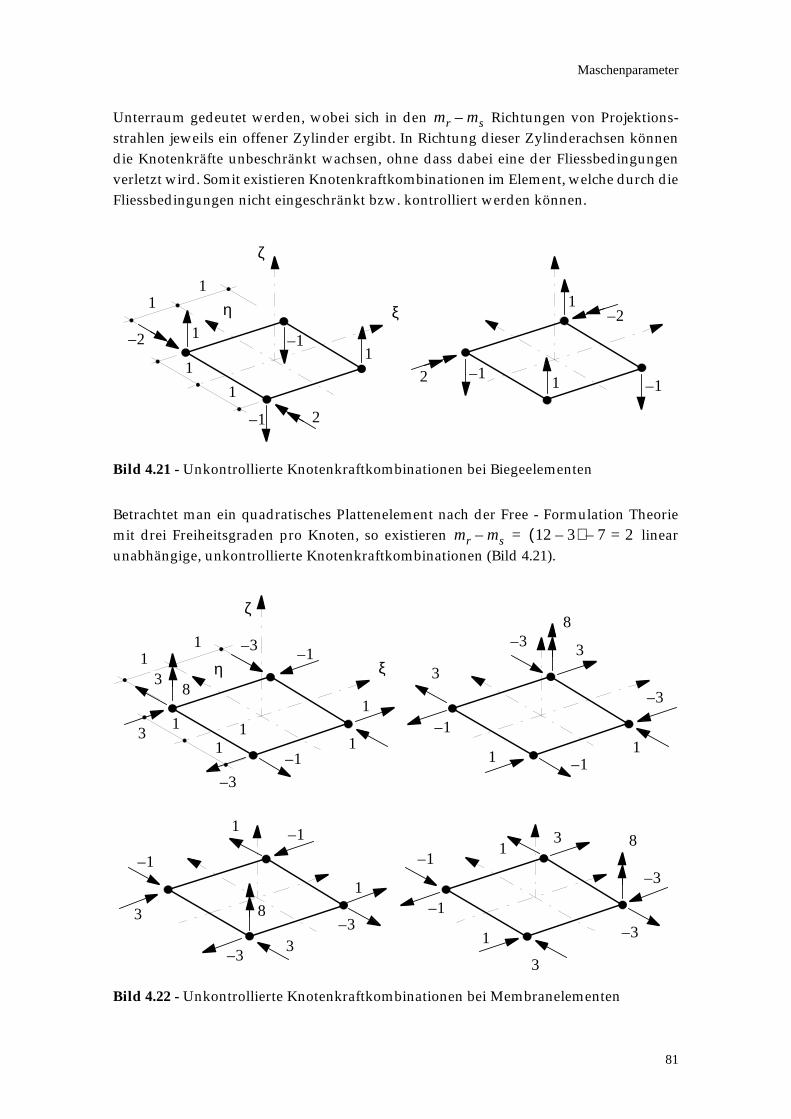
Maschenparameter
81
Unterraum gedeutet werden, wobei sich in den Richtungen von Projektions-
strahlen jeweils ein offener Zylinder ergibt. In Richtung dieser Zylinderachsen können
die Knotenkräfte unbeschränkt wachsen, ohne dass dabei eine der Fliessbedingungen
verletzt wird. Somit existieren Knotenkraftkombinationen im Element, welche durch die
Fliessbedingungen nicht eingeschränkt bzw. kontrolliert werden können.
Bild 4.21 - Unkontrollierte Knotenkraftkombinationen bei Biegeelementen
Betrachtet man ein quadratisches Plattenelement nach der Free - Formulation Theorie
mit drei Freiheitsgraden pro Knoten, so existieren linear
unabhängige, unkontrollierte Knotenkraftkombinationen (Bild 4.21).
Bild 4.22 - Unkontrollierte Knotenkraftkombinationen bei Membranelementen
mr ms–
ξη
ζ
21–
1–1
12–
1
1
11
1
1–1–12
2–
mr ms– 12 3–( ) 7 2=–=
ξη
ζ
1–1
1–
1
11
1
11
1
3
1–1
8
1
1–
3–3
8
8
3
3–
3
3–
1–
1
3–
3
3
3–
8
1–
3–
3
3–
3–
3
1
1–
1–1

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
82
Bei einem quadratischen Membranelement nach der Free - Formulation Theorie mit sei-
nen drei Freiheitsgraden (zwei Verschiebungen und eine fiktive Rotation) pro Knoten
exisitieren bei fünf gewählten Verzerrungszuständen line-
ar unabhängige, unkontrollierte Knotenkraftkombinationen (Bild 4.22).
In den Bildern 4.21 und 4.22 sind die durch die Fliessbedingungen unkontrollierten Kno-
tenkraftkombinationen an einem quadratischen finiten Element für die Biege- und Mem-
branbeanspruchung gezeigt. Jede Knotenkraftkombination kann aus einer anderen
Kombination abgeleitet werden, in dem man die - Achse um im Elementschwer-
punkt rotiert.
Jeder Knotenkraftkombination für ein Plattenelement im Raum entspricht ein Vektor
, der sich aus der Summe von zwei orthogonalen Vektoren ergibt
(4.108)
Der Vektor verursacht die gleichen verallgemeinerten Spannungen wie der Vek-
tor und ist mit diesem bezüglich seiner Verschiebungszustände vollkommen statisch
äquivalent.
(4.109)
Aufgrund der vorliegenden Orthogonaltität zwischen den beiden Vektoren und
gilt für den von den Fliessbedingungen nicht kontrollierten Knotenkraftanteil die
Beziehung
(4.110)
wobei die Knotenkräfte in die Richtung der Projektionsstrahlen auf dem Unter-
raum zeigen. Sie können daher uneingeschränkt wachsen, ohne dass dabei eine der
Fliessbedingungen verletzt wird. Aus diesem Grund wird der Maschenparameter
eingeführt, der das Verhältnis der äusseren Arbeiten darstellt, die die Knotenkräfte an
den kontrollierten Verschiebungszuständen und an den tatsächlichen Verschiebungen
leisten.
(4.111)
Mit bezeichnet man den Vektor der Knotenkräfte und mit den tatsächlichen Kno-
tenverschiebungsvektor. stellt den aus den Verzerrungszuständen der tatsächlichen
Verschiebungen am besten angepassten Verschiebungsvektor dar. Mit dem Minimum
der Fehlerquadrate lassen sich nun generalisierte Koordinaten für die Verschiebun-
gen mit folgender Bestimmungsgleichung berechnen mit nach (4.53)
(4.112)
mr ms– 12 3–( ) 5 4=–=
ξ 90°
pb
pb pb ∆ pb+=
pb Sbpb
Sb UbT
pb UbT
pb= =
pb∆ pb
UbT∆ pb 0=
∆pb
Λb
ΛbWb
Wb-------
12--- ab
T pb
12--- ab
T pb
----------------= =
pb abab
αUb
Ub α ab– R=

Duktilitätsnachweis
83
stellt das Residuum dar. Mit der Extremalbedingung als die Bestimmungs-
gleichung und mit lässt sich bestimmen zu
(4.113)
Mit
(4.114)
lässt sich der Maschenparameter nach (4.111) berechnen. Bei zusätzlicher Membranbe-
anspruchung ist zur Berechnung von analog vorzugehen ((4.112) bis (4.114)). Der
Maschenparameter für Schalen berechnet sich dann aus
(4.115)
indem man zu den Arbeitsanteilen für Biegung im Zähler und im Nenner die Arbeitsan-
teile aus der Membranbeanspruchung addiert.
Der Maschenparameter bzw. ist ein Mass für die Abweichung der Elementkno-
tenkräfte vom Vektor der kontrollierten Knotenkräfte . Weil nie grösser sein
kann als , gilt stets . Ist so wird der Spannungszustand im Element
zur Gänze kontrolliert, nimmt er aber Werte unter 0,8 an, so sollte die Berechnung mit
verfeinerter Masche wiederholt werden.
4.6 Duktilitätsnachweis
Das plastische Verformungsvermögen von Stahlbetonbauteilen unter vorwiegender
Biege- bzw. Zugbeanspruchung wird massgeblich von den Duktilitätseigenschaften des
verwendeten Bewehrungsstahls bestimmt. Bisher wurde stillschweigend angenommen,
dass die Duktilität der Betonstähle ausreichend vorhanden sei. Angesichts der in den
letzten Jahren beobachteten Verminderung der plastischen Verformbarkeit von Beweh-
rungsstählen bedingt durch die Beimengung von höheren Anteilen an Schrott bei der
Stahlgewinnung, spielt der Nachweis der Duktilität heute eine immer grössere Rolle
(Marti [20]). Die Grundlage zur Definition der Duktilität bildet ein bilineares, elastopla-
stisches Kraft - Verformungsdiagramm. Als Duktilität wird das Verhältnis der elastisch
- plastischen Verformung zur elastischen Verformung bei Fliessbeginn bezeichnet und
errechnet sich aus
(4.116)
Dabei stellt die Stahldehnung und die Dehnung zu Fliessbeginn dar (Bild 4.23).
R ∂Q∂α------- 0=
Q RTR= α
α UbTUb[ ]
1–Ub
Tab=
ab Ubα=
amΛs
ΛsWb Wm+Wb Wm+-----------------------=
Λb Λspb pb Wb
Wb Λb 1≤ Λb 1=
µεs
εy----=
εs εy

Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
84
Bild 4.23 - Duktilität
Stellt die maximal mögliche Verformung dar, d.h. unmittelbar bevor der
Bruch eintritt, so spricht man von Grenzduktilität. Die in einem Tragwerk auftretende
Duktilität sollte stets kleiner sein als die Grenzduktilität. Um den Nachweis der Duktili-
tät durchführen zu können, werden zunächst die Krümmungen im Querschnitt be-
stimmt und aus dem Kräftegleichgewicht wird die Lage der Dehnungsebene festgelegt.
Ist diese bekannt, so kann aus (4.116) die Duktilität bestimmt werden.
Der im Abschnitt (2.4) erklärte Lastschrittalgorithmus liefert am Ende jeder Laststufe die
zu dieser Laststufe gehörenden Verschiebungen. Kann man die Krümmungen im finiten
Element bzw. in ausgewählten Punkten innerhalb des finiten Elementes aus den 2. Ab-
leitungen der Verschiebungen ermitteln, so ist die Neigung der Dehnungsebene eindeu-
tig festgelegt. Die Lage der Nullinie ist dann durch das Kräftegleichgewicht zwischen
Beton und Stahl eindeutig bestimmt. Für die Berechnung der Krümmungen im finiten
Element wird aus den Elementknotenverschiebungen eine Durchbiegungsverteilung
mit konstanten Krümmungen nach dem Minimum der Fehlerquadrate ermit-
telt (Bild 4.24). Ausgehend von einem vollständigen Polynom zweiten Grades als Appro-
ximationsfunktion
(4.117)
werden für die Durchbiegung die generalisierten Koordinaten mit nach
dem Minimum der Fehlerquadrate bestimmt. Bezeichnet man mit das - te Residu-
um, d.h. den Unterschied zwischen dem Wert des Polynoms , bzw. seiner Ab-
leitungen nach oder an der Stelle und dem aus den bekannten
Knotenverschiebungen gegebenen Sollwert , so ergibt sich aus dem Minimum der
Fehlerquadrate mit
(4.118)
Fliessdehnung totale Dehnung
Fliesswiderstand ohne VerfestigungFliesswiderstand
εmaxεy
σy
µεs
εy----=
Duktilität
εs
Grenzduktilität
µmax
εmax
εy----------=
εs ε= max
w ξ η,( )
w ξ η,( ) C0 C1ξ C2η C3 ξ2C4ξη C5 η2
+ + + + +=
Ci i 0…5=Ri i
w ξ η,( )ξ η ξi ηi,
ai
Q RTR Min⇒∑=
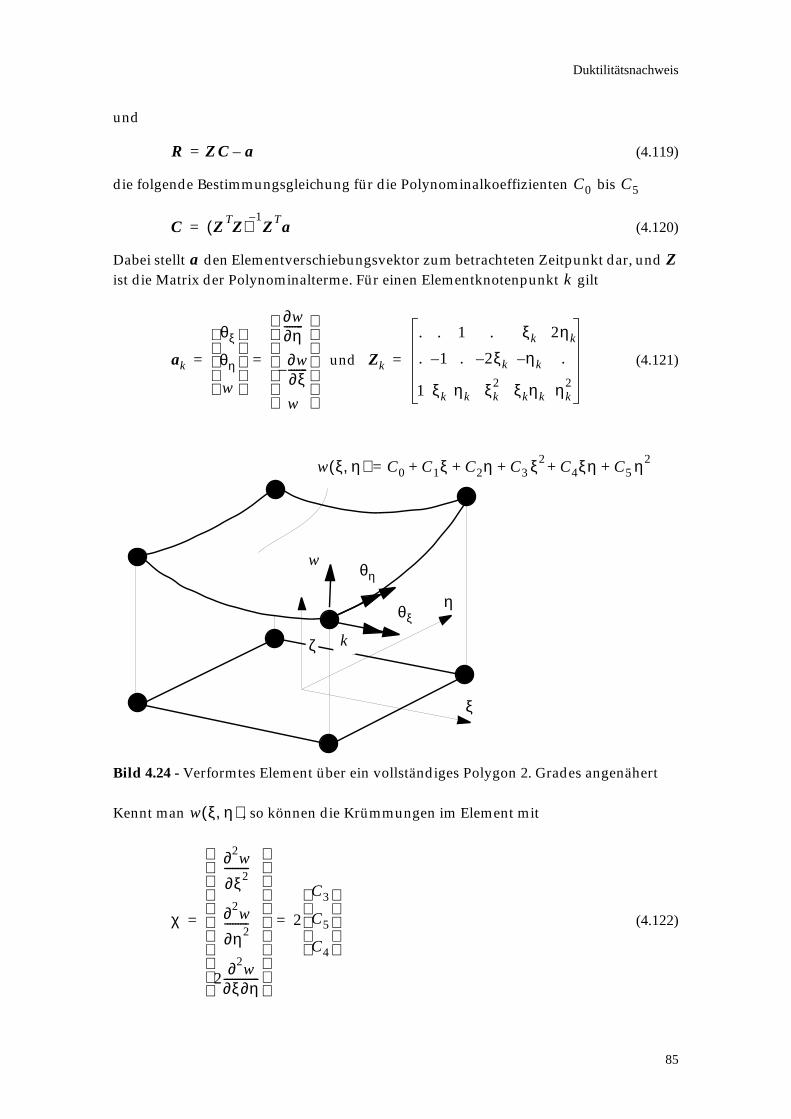
Duktilitätsnachweis
85
und
(4.119)
die folgende Bestimmungsgleichung für die Polynominalkoeffizienten bis
(4.120)
Dabei stellt den Elementverschiebungsvektor zum betrachteten Zeitpunkt dar, und
ist die Matrix der Polynominalterme. Für einen Elementknotenpunkt gilt
und (4.121)
Bild 4.24 - Verformtes Element über ein vollständiges Polygon 2. Grades angenähert
Kennt man , so können die Krümmungen im Element mit
(4.122)
R Z C a–=
C0 C5
C ZTZ( )1–ZTa=
a Zk
ak
θξ
θη
w
∂w∂η-------
∂w∂ξ-------–
w
= = Zk
. . 1 . ξk 2ηk
. 1– . 2– ξk η– k .
1 ξk ηk ξk2 ξkηk ηk
2
=
θξ
θηw
w ξ η,( ) C= 0 C1ξ C2η C3 ξ2C4ξη C5 η2
+ + + + +
ζ
η
ξ
k
w ξ η,( )
χ
∂2w
∂ξ2---------
∂2w
∂η2---------
2∂2
w∂ξ∂η-------------
2
C3
C5
C4
= =
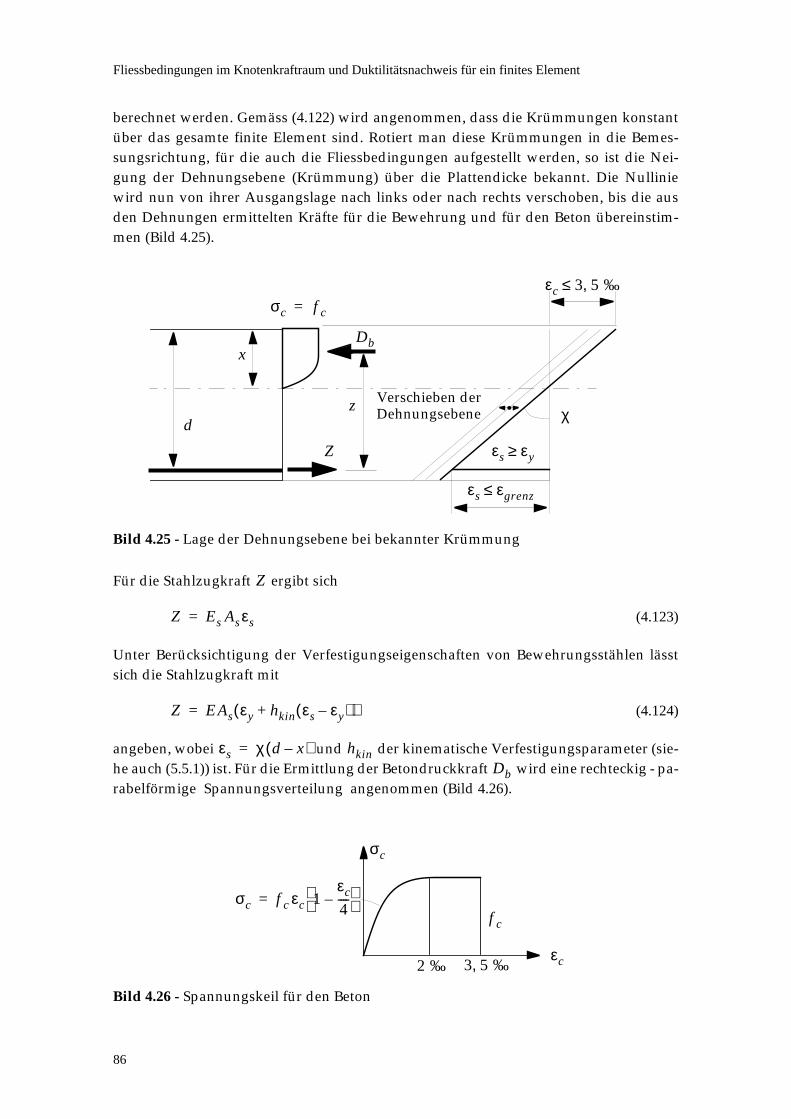
Fliessbedingungen im Knotenkraftraum und Duktilitätsnachweis für ein finites Element
86
berechnet werden. Gemäss (4.122) wird angenommen, dass die Krümmungen konstant
über das gesamte finite Element sind. Rotiert man diese Krümmungen in die Bemes-
sungsrichtung, für die auch die Fliessbedingungen aufgestellt werden, so ist die Nei-
gung der Dehnungsebene (Krümmung) über die Plattendicke bekannt. Die Nullinie
wird nun von ihrer Ausgangslage nach links oder nach rechts verschoben, bis die aus
den Dehnungen ermittelten Kräfte für die Bewehrung und für den Beton übereinstim-
men (Bild 4.25).
Bild 4.25 - Lage der Dehnungsebene bei bekannter Krümmung
Für die Stahlzugkraft ergibt sich
(4.123)
Unter Berücksichtigung der Verfestigungseigenschaften von Bewehrungsstählen lässt
sich die Stahlzugkraft mit
(4.124)
angeben, wobei und der kinematische Verfestigungsparameter (sie-
he auch (5.5.1)) ist. Für die Ermittlung der Betondruckkraft wird eine rechteckig - pa-
rabelförmige Spannungsverteilung angenommen (Bild 4.26).
Bild 4.26 - Spannungskeil für den Beton
εc 3 5 ‰,≤
xDb
Z εs εy≥
εs εgrenz≤
Verschieben derDehnungsebene
dz
σc f c=
χ
Z
Z Es Asεs=
Z EAs εy hkin εs εy–( )+( )=
εs χ d x–( )= hkinDb
εc
σc
2 ‰ 3 5 ‰,
σc f c εc 1εc
4----–
=f c

Duktilitätsnachweis
87
Sie errechnet sich bei zu
(4.125)
und bei
(4.126)
mit . Durch Gleichsetzen von mit kann die Lage der Nullinie über er-
mittelt werden. Ist die Lage der Dehnungsebene bekannt, so kann aus dieser direkt die
Stahldehnung und mit dieser nach Bild 4.23 die Duktilität berechnet werden.
Beim Duktilitätsnachweis für Schalen wird für die Ermittlung der Zug- und Druckkräfte
der Einfluss der Membrankräfte mitberücksichtigt. Bei zunehmenden Membraneinfluss
nimmt die Neigung der Dehnungsebene ab. Wird die Betondruckkraft zu Null, so wird
in die Berechnung der Bewehrungsanteil der oberen Plattenbewehrung miteinbezogen.
Im Grenzfall wird die Krümmung und die Membrankraft wird auf die obere und
untere Bewehrung aufgeteilt. Die Ermittlung der Membrankraft erfolgt direkt aus den in
die Bemessungsrichtung rotierten verallgemeinerten Spannungen , wobei nur die
konstanten Spannungszustände im Element herangezogen werden.
εc 2 ‰<
Db b f c
εc2
2----- 1
εc
6----–
=
εc 2 ‰>
Db b f c εc23---–
=
εc χx= Z Db x
χ 0=
Sm

88

89
5 Elastoplastisches Elementgesetz imKnotenkraftraum
5.1 Grundlagen der ‘Face’ Methode
Die herkömmlichen nichtlinearen Materialbeschreibungen ermitteln aus einem zum
Zeitpunkt bekannten den für den Zeitpunkt benötigten Spannungs- und Ver-
zerrungszustand zufolge eines neuaufgebrachten Verzerrungsinkrementes. Dazu wird
das Materialgesetz für einen Spannungspunkt im Element aufgestellt. Im Gegensatz zu
dieser Vorgehensweise wird in diesem Kapitel nun ein Verfahren vorgestellt, bei dem
das Materialgesetz für das gesamte finite Element formuliert wird. Dabei wird nicht wie
bisher im Spannungs - Verzerrungsraum sondern im Knotenkraft - Verschiebungsraum
gearbeitet. In diesem werden auch die Fliessbedingungen formuliert (siehe Kapitel 4).
Verwendet man elastoplastische Materialien, d.h. auf der Plastizitätstheorie beruhende
Materialbeschreibungen, so lässt sich ihr elastoplastisches Verhalten in einem - di-
mensionalen Knotenkraft - Verschiebungsraum durch eine konvexe Fliessfigur beschrei-
ben. Diese Fliessfigur trennt den Knotenkraftraum in zwei Teile, in einen Raum der
elastischen mit
(5.1)
(aplastischer Bereich) und in einen Raum der plastischen Verschiebungszustände mit
(5.2)
Erreichen die aufgebrachten Verschiebungsinkremente die Fliessgrenze, so haben weite-
re Verschiebungsinkremente senkrecht zur Fliessfläche keine Zunahme der Knotenkräf-
te zur Folge. Es stellen sich nur mehr plastische Verschiebungsinkremente ein. Die
plastischen Verschiebungsinkremente errechnen sich aus
mit (5.3)
Der plastische Parameter stellt einen nichtnegativen Koeffizienten beliebiger Grösse
dar. Beschreibt man die Fliessfigur durch linearisierte Fliessfunktionen bzw. Teil-
flächen mit
....... (5.4)
t t ∆t+
md
Φ
Φ p( ) 0<
Φ p( ) 0=
ap
ap∂Φ∂p------- λ=
λ 0 falls Φ p( )≥ 0=
λ 0 falls Φ p( ) 0<=
λΦ n
Φ1 p( ) F1T p WY1– 0= = Φn p( ) Fn
T p WYn– 0= =

Elastoplastisches Elementgesetz im Knotenkraftraum
90
so wird die nichtlineare Fliessfunktion durch lineare Funktionen approximiert.
stellt den - ten initialen plastischen Widerstand dar. Das dazugehörige adaptier-
te Fliessgesetz lautet dann
mit (5.5)
Eine Fliessebene wird genau dann als aktiv bezeichnet, wenn die Bedingung
(5.6)
exakt erfüllt ist. Fasst man die einzelnen Aussennormalenvektoren resp. Fliessvektoren
zur Matrix zusammen, so können die linearisierten Fliessbedingungen noch in der
Form
oder (5.7)
angeschrieben werden mit als Vektor der verbleibenden Widerstände (Restwider-
stände). Ist ein Einheitsvektor, so stellt den Abstand der i - ten Fliessebene vom
Knotenkraftnullpunkt dar (siehe Bild 5.1).
Bild 5.1 - Nichtlineare und linearsierte Fliessfläche
Die zur Materialbeschreibung erforderlichen Knotenkräfte und Tangentensteifigkeits-
matrix für den Zeitpunkt müssen aus den Knotenkraft - Verschiebungsbezie-
hungen ermittelt werden, die bei elastoplastischen Materialien nur in inkrementeller
Form angegeben werden können.
Φ nWYn n
ap
∂Φi
∂p--------- λi F i λi
i 1=
n
∑=i 1=
n
∑=λi 0 falls F i
T p≥ WYi=
λi 0 falls F iT p WYi<=
i
Φi p( ) F iT p WYi 0=–=
F i F
FT p WY≤ W WY FT p–=
WF i WYi
1Φ p( ) 0=
Φ p( ) 0<
pj
apj
pk apk
p
Wi
F i
F iT p WYi– 0=
WYi
pkT t t∆+

Grundlagen der ‘Face’ Methode
91
Betrachtet man ein gegebenes Verschiebungsinkrement mit
(5.8)
so kann dieses in einen elastischen Anteil und in einen plastischen aufgeteilt wer-
den. Aus dem elastischen Anteil errechnen sich die Knotenkraftinkremente zu
(5.9)
bzw. mit (5.8) zu
(5.10)
wobei die Tangentensteifigkeitsmatrix darstellt. Die Fliessparameter lassen sich
unter der Voraussetzung eliminieren, dass der Knotenkraftvektor die Fliessbedin-
gung genauso erfüllt, wie der Knotenkraftvektor selbst. Die Knotenkraftinkremente
sind somit tangential zur Fliessfigur und liegen in der Hyperebene, die wiederum senk-
recht zum jeweiligen Fliessvektor steht (Bild 5.2).
Bild 5.2 - Knotenkraftinkrement mit seinen Auswirkungen
Aus der Bedingung der Orthogonalität zwischen Fliessvektor und Knotenkraftinkre-
menten
(5.11)
lassen sich die ‘s als Funktion von berechnen
(5.12)
Setzt man (5.12) in (5.10) ein, so ergeben sich die inkrementellen Knotenkräfte zu
a
a ae ap+=
ae app
p kae=
p k a ap–( ) k a F λ–( ) kT= a==
kT λp p+
p
apk
pp p+
p
pk
pj
apj
F i p( )
F i p p+( )
FT p FTk a F λ–( ) 0==
λ a
λ FTk
FTk F--------------- a=
p

Elastoplastisches Elementgesetz im Knotenkraftraum
92
(5.13)
mit als Tangentensteifigkeitsmatrix. Daraus ist auch ersichtlich, dass die Knotenkräf-
te sich nicht ändern, wenn der Verschiebungsvektor in die gleiche Richtung zeigt, wie
der Fliessvektor . Tritt nach Erreichen der Fliessgrenze eine Entlastung mit
auf, dann verhält sich das Material wieder elastisch mit und es gilt
.
5.2 Tableau - Algorithmus
Für Berechnung der Knotenkraftinkremente nach (5.10)
(5.14)
der plastischen Widerstände nach (5.7)
(5.15)
und der augenblicklichen Widerstandsinkremente
(5.16)
wird ein Tableau mit einem entsprechenden Algorithmus aufgestellt (Anderheggen [3]).
Man betrachtet zunächst einen teilplastifizierten Zustand, in dem Fliessbedingungen ak-
tiv sind und die dazugehörigen Restwiderstände verschwinden. Diese verschwinden-
den Widerstände werden zu einem Vektor zusammengefasst. Die Widerstän-
de treten nur in Verbindung mit inaktiven Fliessbedingungen auf, und bilden
die Widerstandsmenge von ( mit ). Analog dazu wird
auch die Menge der plastischen Parameter in zwei Teilmengen unterteilt, und zwar
in und für aktive und inaktive Fliessbedingungen ( mit
). Somit gehören und immer zu , während
und zu gehören.
Bild 5.3 zeigt den Zusammenhang der Beziehungen (5.14), (5.15) und (5.16) in Tabellen-
form für den elastischen Anfangszustand. Dargestellt auf der linken Seite sind die initia-
len Werte für die Knotenkräfte mit und für die plastischen Widerstände mit
( stellt den initialen plastischen Widerstandsvektor dar) sowie die Bezie-
hungen zwischen den Inkrementen und untereinander.
p kkFF T
FTk F---------------k–
a kT a= =
kT
a F λ=FTk a 0< λ 0=kT k=
p
p k a ap–( ) ka kF λ– ka kFλ0 0=
λ1 0≥
–= = =
W
WW0 0=
W1 0≥
WY FT p 0≥–= =
W
WW0 0=
W1 0≠
FT p– FTka– FTkF λ+= = =
W0 0=Wi 0≥
W1 0≥ W W0 W1∪= W0 W1≠λi
λ1 0≥ λ0 0= λ λ1 λ0∪=λ1 λ0≠ W0 0= W0 0= λ1 0≥ W1 0≥
W1 0≠ λ0 0=
p 0=W WY= WY
p W
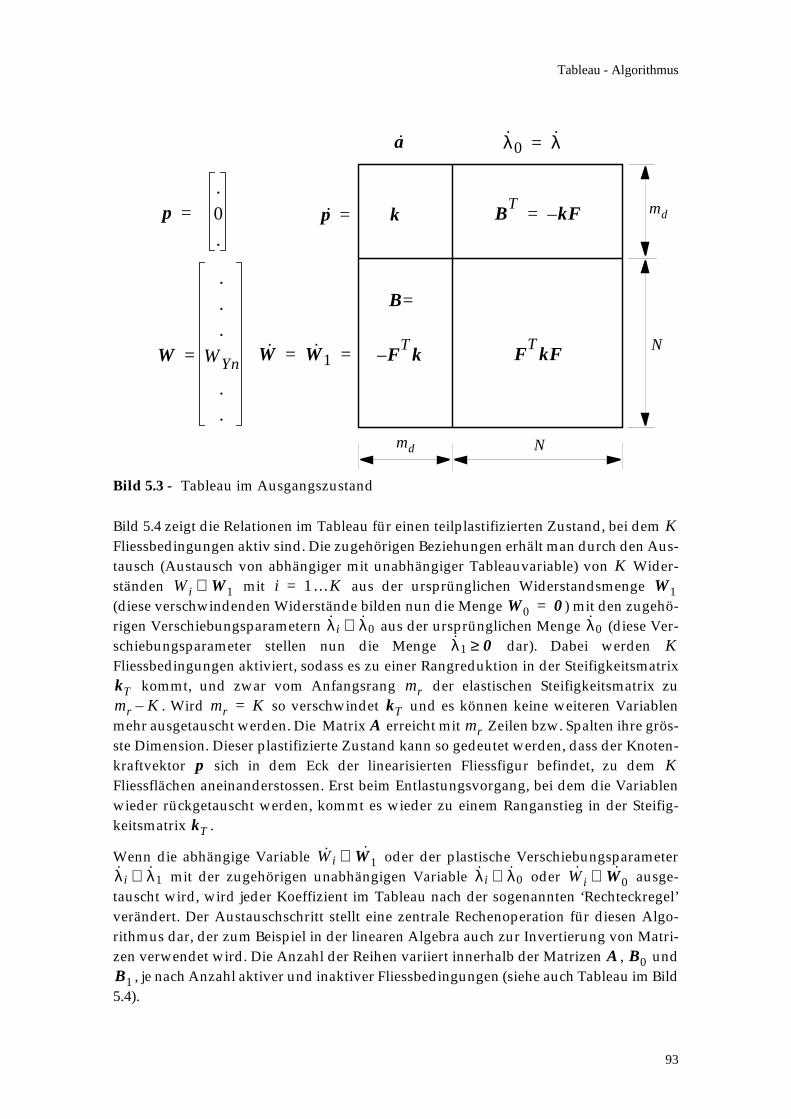
Tableau - Algorithmus
93
Bild 5.3 - Tableau im Ausgangszustand
Bild 5.4 zeigt die Relationen im Tableau für einen teilplastifizierten Zustand, bei dem
Fliessbedingungen aktiv sind. Die zugehörigen Beziehungen erhält man durch den Aus-
tausch (Austausch von abhängiger mit unabhängiger Tableauvariable) von Wider-
ständen mit aus der ursprünglichen Widerstandsmenge
(diese verschwindenden Widerstände bilden nun die Menge ) mit den zugehö-
rigen Verschiebungsparametern aus der ursprünglichen Menge (diese Ver-
schiebungsparameter stellen nun die Menge dar). Dabei werden
Fliessbedingungen aktiviert, sodass es zu einer Rangreduktion in der Steifigkeitsmatrix
kommt, und zwar vom Anfangsrang der elastischen Steifigkeitsmatrix zu
. Wird so verschwindet und es können keine weiteren Variablen
mehr ausgetauscht werden. Die Matrix erreicht mit Zeilen bzw. Spalten ihre grös-
ste Dimension. Dieser plastifizierte Zustand kann so gedeutet werden, dass der Knoten-
kraftvektor sich in dem Eck der linearisierten Fliessfigur befindet, zu dem
Fliessflächen aneinanderstossen. Erst beim Entlastungsvorgang, bei dem die Variablen
wieder rückgetauscht werden, kommt es wieder zu einem Ranganstieg in der Steifig-
keitsmatrix .
Wenn die abhängige Variable oder der plastische Verschiebungsparameter
mit der zugehörigen unabhängigen Variable oder ausge-
tauscht wird, wird jeder Koeffizient im Tableau nach der sogenannten ‘Rechteckregel’
verändert. Der Austauschschritt stellt eine zentrale Rechenoperation für diesen Algo-
rithmus dar, der zum Beispiel in der linearen Algebra auch zur Invertierung von Matri-
zen verwendet wird. Die Anzahl der Reihen variiert innerhalb der Matrizen , und
, je nach Anzahl aktiver und inaktiver Fliessbedingungen (siehe auch Tableau im Bild
5.4).
k BT
kF–=
FT
k– FT
kF
a λ0 λ=
p =
W W1= =
.
.
.
WYn
.
.
W =
.
0
.
p =
B=
md N
N
md
K
KWi W1∈ i 1…K= W1
W0 0=λi λ0∈ λ0
λ1 0≥ K
kT mrmr K– mr K= kT
A mr
p K
kT
Wi W1˙∈
λi λ1∈ λi λ0∈ Wi˙ W0
˙∈
A B0B1

Elastoplastisches Elementgesetz im Knotenkraftraum
94
Bild 5.4 - Tableau im teilplastifizierten Zustand mit aktiven Fliessbedingungen
Der Algorithmus ist im Bild 5.5 dargestellt. Es liegt folgende Situation vor
Gegeben sei ein Verschiebungsinkrement und eine vorausgesetzte li-
neare Variation von innerhalb eines Zeitschrittes von nach
mit und (5.17)
Gesucht sind für den Zeitpunkt die Knotenkräfte und die tangentielle Stei-
figkeitsmatrix .
Der Zeitparameter und die Knotenverschiebungen werden in Zeitschritten in-
krementiert und es gilt . Die Hauptschritte des Algorithmus sind aus Bild 5.5
ersichtlich mit . und bezeichnen die - te Reihe der Matrizen und
.
kT B1T
B1 *
a λ0
p =
W1 =
A
B– 0T
B0
*
*λ1˙ =
W0˙
K
K mr≤
K
a at t∆+
at
–=∆a τ( ) t t t∆+
a τ( ) at τ ∆a+= τ 0…1= a da
dτ------ ∆a
∆τ-------= =
t t∆+ pt t∆+
kt t∆+
T
τ a τ∆a ∆τ a∆=
a ∆a= B1i B0i i B1B0

Tableau - Algorithmus
95
Bild 5.5 - Ablaufschema zum Tableau-Algorithmus
Schritt 1: Initialisierungsphase mit und
Schritt 2: Multipliziere, falls vorhanden, jede Zeile der Matrix mit dem Verschie-
bungsinkrement . Wird das Produkt der - ten Zeile von mit nega-
tiv, so tausche man die abhängige Variable mit der zugehörigen
unabhängigen Variable aus. Der Entlastungszustand ist eingetreten
und das Material ist ‘elastischer’ geworden. Die Anzahl der Zeilen in der
Matrix hat sich um eins reduziert, die von der Matrix haben sich um
eins vergrössert. Der Rang der Steifigkeitsmatrix hat um eins zugenom-
men. Dieser Schritt wird solange wiederholt, bis jedes Produkt positiv ist
Initialisierung: mit∆τ 0= ∆τ 0…1=
Existiert mit die Matrix so berechne
Wird so tausche die abhängige Variable mit der unabhängi-
gen Variablen aus. Dabei verkleinert sich um eins. Dieser Schritt
wird solange wiederholt, bis alle sind, oder wird.
K 0> B0
λ1i B0i a=
λ1i 0< λ1i
W0i Kλ1i 0> K 0=
Bestimmung von ∆τ
∆τ mini
W1i
B1i a-----------– B1i– a 0 1 τ–( );>
=
Die tangentielle Steifigkeitsmatrix erscheint im oberen linken Fenster
Aktualisierung
und
Ist , so tausche die abhängige Variable mit der unabhängigen
Variable aus und gehe zurück zu Schritt 2
W1 W1 ∆τW1˙+= λ1 λ1 ∆τ λ1+=
p p kT a ∆τ+=
τ τ ∆τ+=
τ 1< W1i
λ0i
1
2
3
4
5
p 0= ∆τ 0=
i B0a i B0 a
λ1i
W0i
KB0 B1
kT

Elastoplastisches Elementgesetz im Knotenkraftraum
96
oder die Matrix mit verschwindet. Das Tableau ist dann im rich-
tigen Zustand zur Aufnahme des Verschiebungsinkrementes .
Schritt 3: Berechne die inkrementelle Änderung der Widerstandsvariable aus
dem verbleibenden Verschiebungs- bzw. Zeitinkrement . Ist diese
grösser als der zugehörige verbleibende Widerstand , so werden
Fliessbedingungen verletzt und ist zu reduzieren, bzw. neu zu berech-
nen. Es errechnet sich aus dem Minimum der Verhältnisse aller aktiven Wi-
derstände zu deren Änderung mit unter der Bedingung,
dass ist. Wird jedoch keine der Fliessbedingungen verletzt, d.h.
keines der Inkremente ist grösser als der zugehörige verbleibende Wider-
stand , so ist durch zu ersetzen. Das verbleibende Ver-
schiebungsinkrement kann nun voll aufgebracht werden.
Schritt 4: Berechne/aktualisiere die verbleibenden plastischen Widerstände, Fliesspa-
rameter und die internen Knotenkräfte. Ist , so konnte das Ver-
schiebungsinkrement nicht vollständig aufgebracht werden, ohne dass
dabei Fliessbedingungen verletzt werden. Man tauscht daher die abhängige
Variable mit der unabhängigen Variable aus, und dadurch wird die
-te Fliessbedingung aktiv. Das Material wird ‘plastischer’. Die Anzahl der
Zeilen in der Matrix nimmt um eins zu, die in der Matrix um eins ab.
Der Rang der tangentiellen Steifigkeitsmatrix nimmt um eins ab. Dieser
Ablauf ist ab Schritt 2 solange zu wiederholen, bis das vollständige Verschie-
bungsinkrement bei aufgebracht ist.
Schritt 5: Im linken oberen Rand des Tableaus im Bild 5.4 erscheint die tangentielle
Steifigkeitsmatrix für das vollaufgebrachte Verschiebungsinkrement
.
5.3 Modifizierter Tableau - Algorithmus
Da die Anzahl der Fliessbedingungen bei Platten (siehe (4.61) und (4.62)) 32 und bei
Schalen (siehe (4.84)) 64 beträgt, ist man bestrebt, den Rechenaufwand und den Speicher-
bedarf für das Tableau zur Berechnung der tangentiellen Steifigkeitsmatrix und
der Knotenkräfte zu minimieren. Abgespeichert werden lediglich noch die kon-
stanten Submatrizen , und die aus (Bild 5.4) invertierte Matrix . Durch die
Grösse der Matrix wird die Anzahl der aktiven Fliessbedingungen angezeigt. Bei
der modifizierten Form des Tableau - Algorithmus wird mit den effektiven Knotenver-
schiebungsinkrementen gearbeitet, die sich aus
(5.18)
berechnen. Das Ablaufschema dazu ist im Bild 5.6 dargestellt.
B0 K 0=a
W1i
B1i a ∆τW1i
∆τ
i W1i B1i a–( )⁄B1i a 0>–
iW1i ∆τ ∆τ 1 τ–=
τ ∆τ 1<+
W1i λ0i
iB0 B1
kT
τ ∆τ+ 1=
kTa ∆a+
kt t∆+
Tp
t t∆+
k B A A 1–
A 1–
aeff a F λ–=
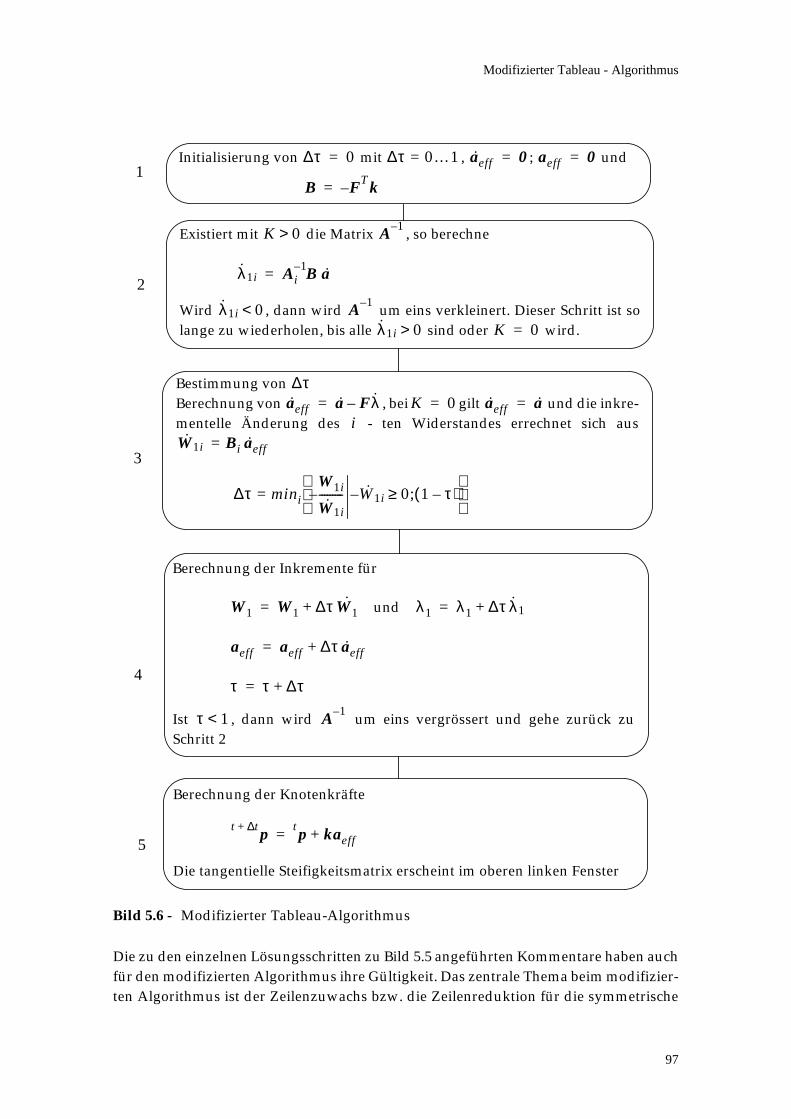
Modifizierter Tableau - Algorithmus
97
Bild 5.6 - Modifizierter Tableau-Algorithmus
Die zu den einzelnen Lösungsschritten zu Bild 5.5 angeführten Kommentare haben auch
für den modifizierten Algorithmus ihre Gültigkeit. Das zentrale Thema beim modifizier-
ten Algorithmus ist der Zeilenzuwachs bzw. die Zeilenreduktion für die symmetrische
Initialisierung von mit , ; und∆τ 0= ∆τ 0…1= aeff 0= aeff 0=
B FTk–=
Bestimmung von
Berechnung von , bei gilt und die inkre-
mentelle Änderung des - ten Widerstandes errechnet sich aus
∆τaeff a F λ–= K 0= aeff a=
iW1i Bi aeff=
∆τ mini
W1i
W1i
---------– W– 1i 0 1 τ–( );≥
=
Berechnung der Knotenkräfte
Die tangentielle Steifigkeitsmatrix erscheint im oberen linken Fenster
pt t∆+
p kaeff+t
=
1
2
3
4
5
Existiert mit die Matrix , so berechne
Wird , dann wird um eins verkleinert. Dieser Schritt ist so
lange zu wiederholen, bis alle sind oder wird.
K 0> A 1–
λ1i Ai1– B a=
λ1i 0< A 1–
λ1i 0> K 0=
Berechnung der Inkremente für
und
Ist , dann wird um eins vergrössert und gehe zurück zu
Schritt 2
W1 W1 ∆τ W1˙+= λ1 λ1 ∆τ λ1+=
aeff aeff ∆τ aeff+=
τ τ ∆τ+=
τ 1< A 1–
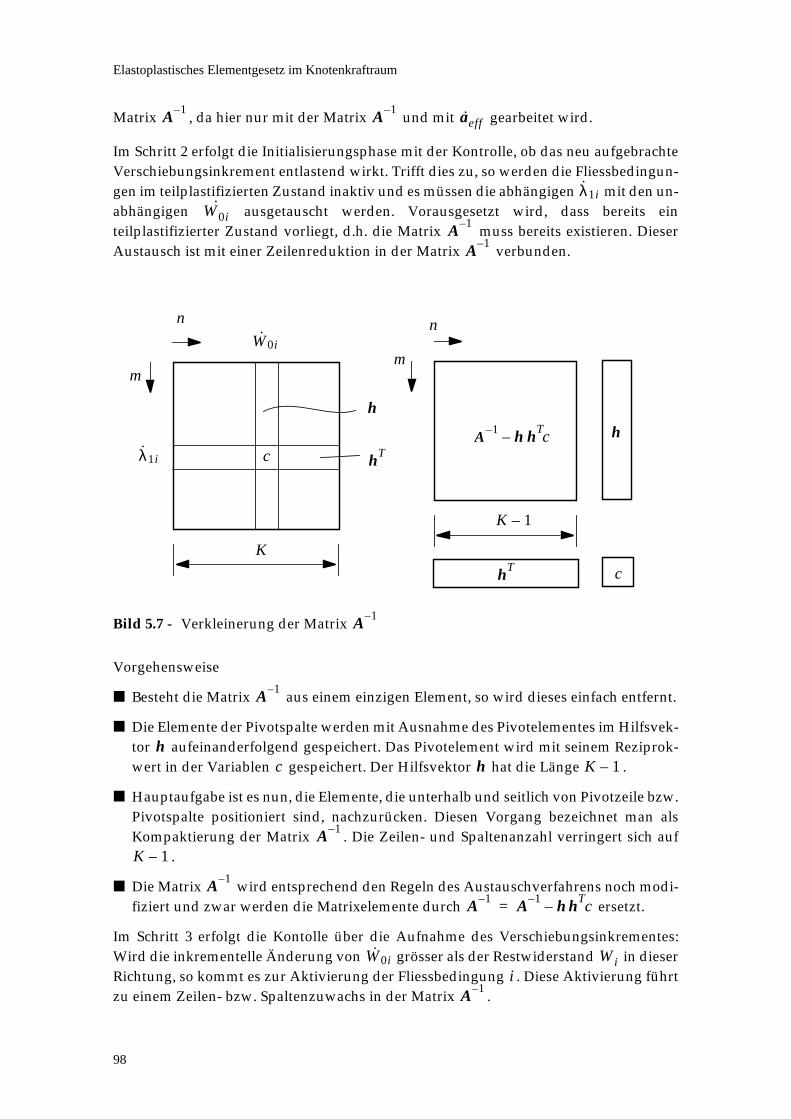
Elastoplastisches Elementgesetz im Knotenkraftraum
98
Matrix , da hier nur mit der Matrix und mit gearbeitet wird.
Im Schritt 2 erfolgt die Initialisierungsphase mit der Kontrolle, ob das neu aufgebrachte
Verschiebungsinkrement entlastend wirkt. Trifft dies zu, so werden die Fliessbedingun-
gen im teilplastifizierten Zustand inaktiv und es müssen die abhängigen mit den un-
abhängigen ausgetauscht werden. Vorausgesetzt wird, dass bereits ein
teilplastifizierter Zustand vorliegt, d.h. die Matrix muss bereits existieren. Dieser
Austausch ist mit einer Zeilenreduktion in der Matrix verbunden.
Bild 5.7 - Verkleinerung der Matrix
Vorgehensweise
Besteht die Matrix aus einem einzigen Element, so wird dieses einfach entfernt.
Die Elemente der Pivotspalte werden mit Ausnahme des Pivotelementes im Hilfsvek-
tor aufeinanderfolgend gespeichert. Das Pivotelement wird mit seinem Reziprok-
wert in der Variablen gespeichert. Der Hilfsvektor hat die Länge .
Hauptaufgabe ist es nun, die Elemente, die unterhalb und seitlich von Pivotzeile bzw.
Pivotspalte positioniert sind, nachzurücken. Diesen Vorgang bezeichnet man als
Kompaktierung der Matrix . Die Zeilen- und Spaltenanzahl verringert sich auf
.
Die Matrix wird entsprechend den Regeln des Austauschverfahrens noch modi-
fiziert und zwar werden die Matrixelemente durch ersetzt.
Im Schritt 3 erfolgt die Kontolle über die Aufnahme des Verschiebungsinkrementes:
Wird die inkrementelle Änderung von grösser als der Restwiderstand in dieser
Richtung, so kommt es zur Aktivierung der Fliessbedingung . Diese Aktivierung führt
zu einem Zeilen- bzw. Spaltenzuwachs in der Matrix .
A 1– A 1– aeff
λ1i
W0i˙
A 1–
A 1–
K
c
h
hTλ1i
W0i
n
m
n
m
A 1– h hTc–
hT
h
c
K 1–
A 1–
A 1–
hc h K 1–
A 1–
K 1–
A 1–
A 1– A 1– h hTc–=
W0i Wii
A 1–

Modifizierter Tableau - Algorithmus
99
Vorgehensweise
Suche aus der bereits existierenden Matrix die richtige Spalte und vor-
multipliziere diese mit den bereits aktivierten Fliessvektoren . Speichere das Ergeb-
nis im Hilfsvektor . Berechne das Diagonalelement separat mit und
speichere es in der Variablen .
Füge nun eine Spalte zur invertierten Matrix hinzu, deren Elemente sich aus
errechnen. Die hinzukommende Zeile erhält man einfach aus , das
neue Diagonalelement aus . Die Zeilen- bzw. Spaltenanzahl der Matrix
hat sich dadurch um eins erhöht.
Nun müssen die Elemente der um eins vergrösserten Matrix nach den Regeln des
Austauschverfahrens noch mit
verändert werden. Pivotzeile bzw. Pivotspalte werden mit dem Reziprokwert des
Pivotelementes multipliziert.
Im Bild 5.8 sind die Rechenoperationen aufgezeigt, die zur Vergrösserung der Matrix
führen. Im Anschluss daran müssen noch die im Bild nicht dargestellten Operatio-
nen für den Austauschschritt durchgeführt werden.
Bild 5.8 - Rechenoperationen zur Vergrösserung der Matrix bei Aktivierung der
- ten Fliessbedingung
BT– kF= i
Fh F i
T kF i( )c
g A 1– h–= gT–
c c hT g–=A 1–
A 1– A 1– ggT
c----------–=
A 1–
K
hT
h FT kF i( )=
c F iT kF i( )=
A 1–A 1–
gT–
g A 1– h–=
c c hT g–=
λ1i
W0i
c
hK 1+
c
A 1–i
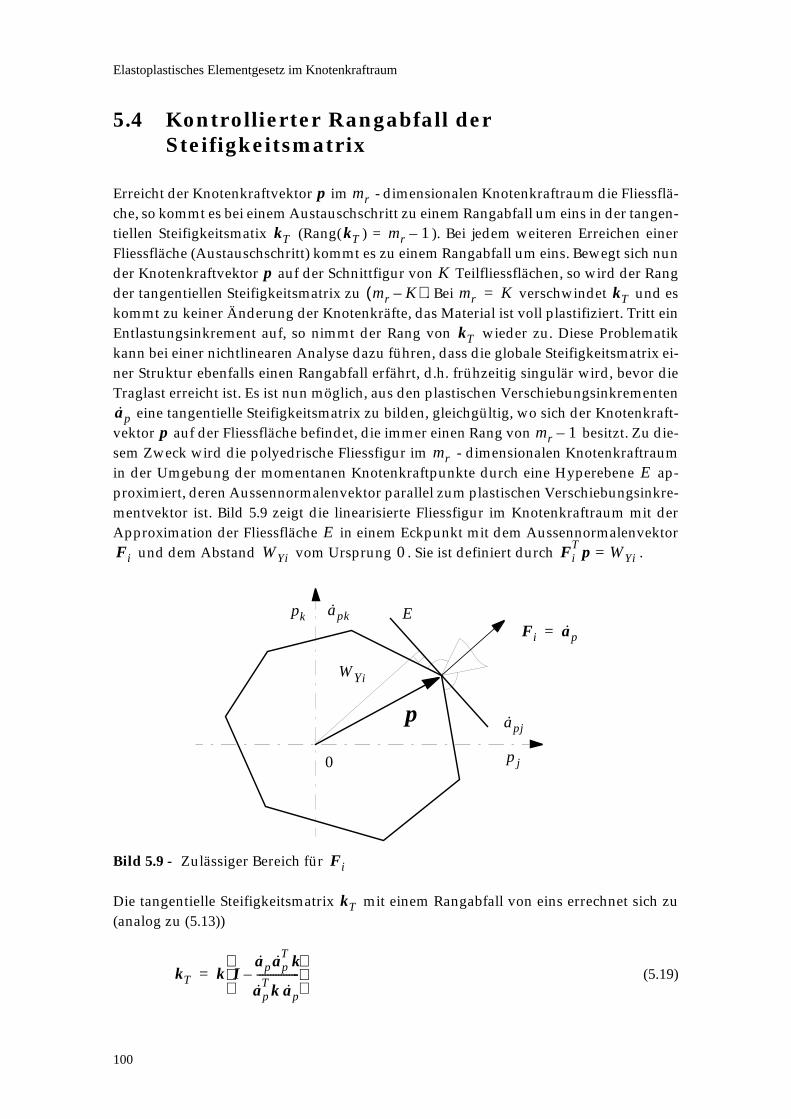
Elastoplastisches Elementgesetz im Knotenkraftraum
100
5.4 Kontrollierter Rangabfall derSteifigkeitsmatrix
Erreicht der Knotenkraftvektor im - dimensionalen Knotenkraftraum die Fliessflä-
che, so kommt es bei einem Austauschschritt zu einem Rangabfall um eins in der tangen-
tiellen Steifigkeitsmatix (Rang( ) = ). Bei jedem weiteren Erreichen einer
Fliessfläche (Austauschschritt) kommt es zu einem Rangabfall um eins. Bewegt sich nun
der Knotenkraftvektor auf der Schnittfigur von Teilfliessflächen, so wird der Rang
der tangentiellen Steifigkeitsmatrix zu . Bei verschwindet und es
kommt zu keiner Änderung der Knotenkräfte, das Material ist voll plastifiziert. Tritt ein
Entlastungsinkrement auf, so nimmt der Rang von wieder zu. Diese Problematik
kann bei einer nichtlinearen Analyse dazu führen, dass die globale Steifigkeitsmatrix ei-
ner Struktur ebenfalls einen Rangabfall erfährt, d.h. frühzeitig singulär wird, bevor die
Traglast erreicht ist. Es ist nun möglich, aus den plastischen Verschiebungsinkrementen
eine tangentielle Steifigkeitsmatrix zu bilden, gleichgültig, wo sich der Knotenkraft-
vektor auf der Fliessfläche befindet, die immer einen Rang von besitzt. Zu die-
sem Zweck wird die polyedrische Fliessfigur im - dimensionalen Knotenkraftraum
in der Umgebung der momentanen Knotenkraftpunkte durch eine Hyperebene ap-
proximiert, deren Aussennormalenvektor parallel zum plastischen Verschiebungsinkre-
mentvektor ist. Bild 5.9 zeigt die linearisierte Fliessfigur im Knotenkraftraum mit der
Approximation der Fliessfläche in einem Eckpunkt mit dem Aussennormalenvektor
und dem Abstand vom Ursprung . Sie ist definiert durch .
Bild 5.9 - Zulässiger Bereich für
Die tangentielle Steifigkeitsmatrix mit einem Rangabfall von eins errechnet sich zu
(analog zu (5.13))
(5.19)
p mr
kT kT mr 1–
p Kmr K–( ) mr K= kT
kT
app mr 1–
mrE
EF i WYi 0 F i
T p WYi=
p
WYi
F i ap=E
0 pj
apj
pk apk
F i
kT
kT k Iapap
T k
apT k ap
----------------–
=
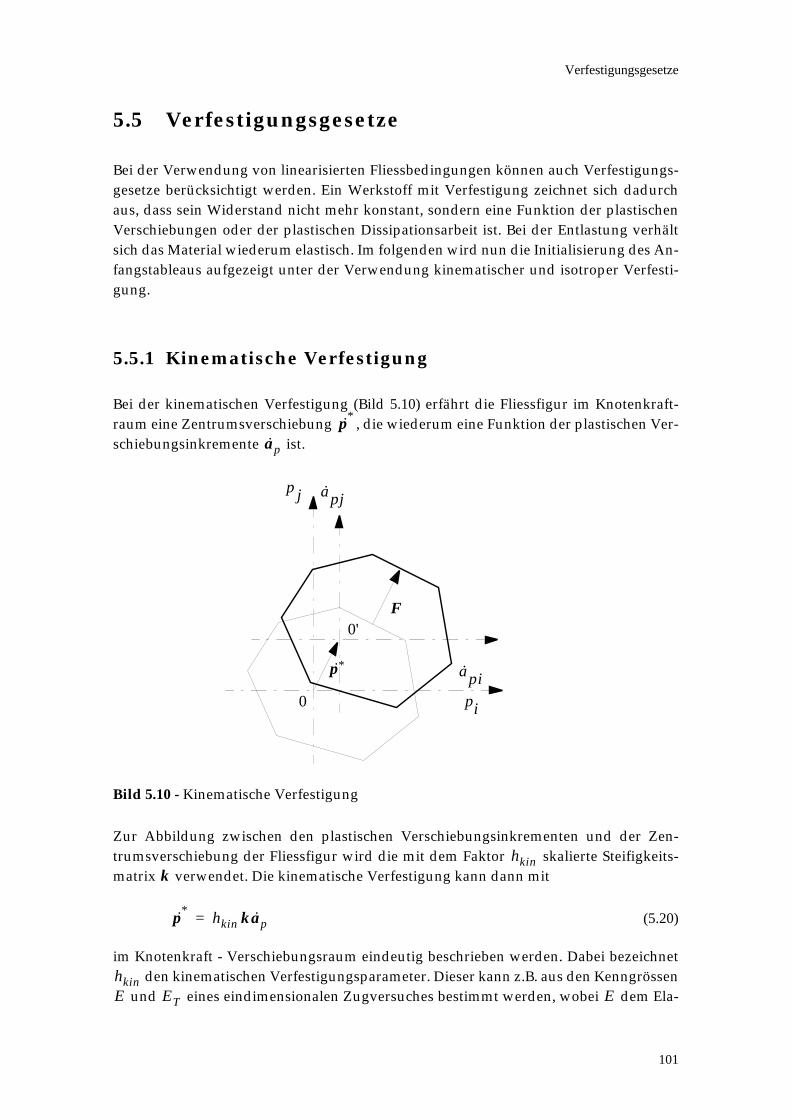
Verfestigungsgesetze
101
5.5 Verfestigungsgesetze
Bei der Verwendung von linearisierten Fliessbedingungen können auch Verfestigungs-
gesetze berücksichtigt werden. Ein Werkstoff mit Verfestigung zeichnet sich dadurch
aus, dass sein Widerstand nicht mehr konstant, sondern eine Funktion der plastischen
Verschiebungen oder der plastischen Dissipationsarbeit ist. Bei der Entlastung verhält
sich das Material wiederum elastisch. Im folgenden wird nun die Initialisierung des An-
fangstableaus aufgezeigt unter der Verwendung kinematischer und isotroper Verfesti-
gung.
5.5.1 Kinematische Verfestigung
Bei der kinematischen Verfestigung (Bild 5.10) erfährt die Fliessfigur im Knotenkraft-
raum eine Zentrumsverschiebung , die wiederum eine Funktion der plastischen Ver-
schiebungsinkremente ist.
Bild 5.10 - Kinematische Verfestigung
Zur Abbildung zwischen den plastischen Verschiebungsinkrementen und der Zen-
trumsverschiebung der Fliessfigur wird die mit dem Faktor skalierte Steifigkeits-
matrix verwendet. Die kinematische Verfestigung kann dann mit
(5.20)
im Knotenkraft - Verschiebungsraum eindeutig beschrieben werden. Dabei bezeichnet
den kinematischen Verfestigungsparameter. Dieser kann z.B. aus den Kenngrössen
und eines eindimensionalen Zugversuches bestimmt werden, wobei dem Ela-
p*
ap
p* apliapi
pi
apjp j
0
0'F
hkink
p*hkin k ap=
hkinE ET E
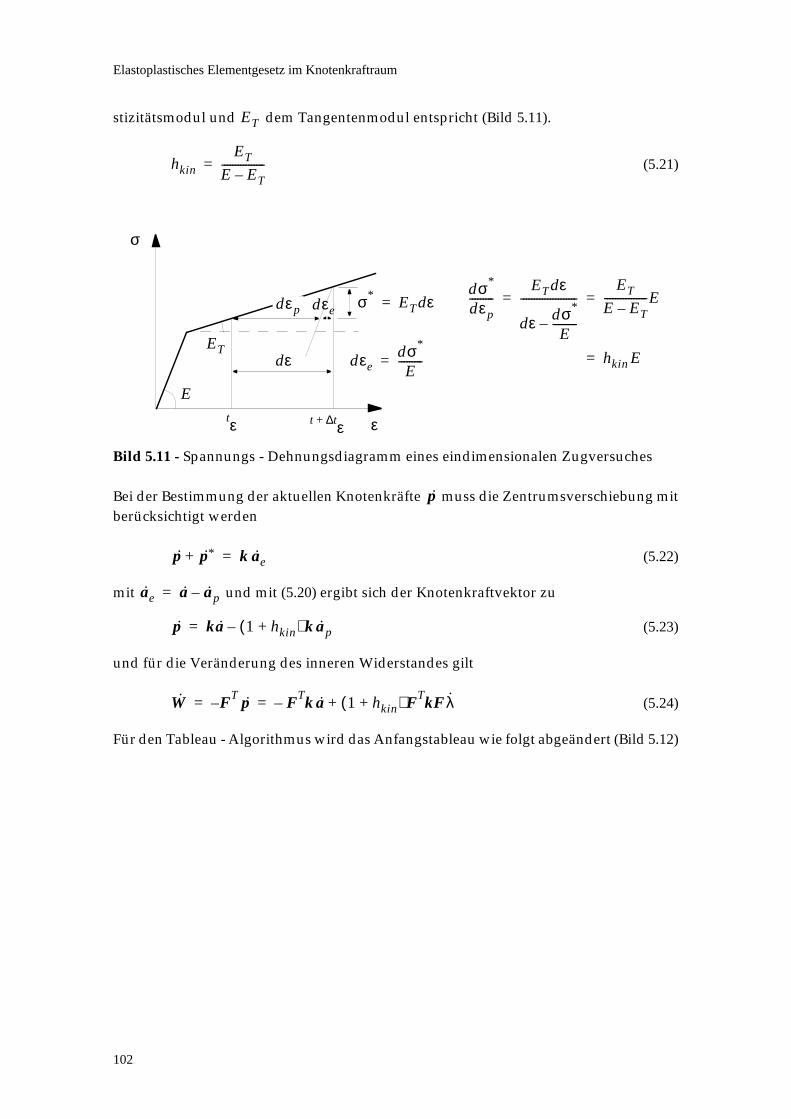
Elastoplastisches Elementgesetz im Knotenkraftraum
102
stizitätsmodul und dem Tangentenmodul entspricht (Bild 5.11).
(5.21)
Bild 5.11 - Spannungs - Dehnungsdiagramm eines eindimensionalen Zugversuches
Bei der Bestimmung der aktuellen Knotenkräfte muss die Zentrumsverschiebung mit
berücksichtigt werden
(5.22)
mit und mit (5.20) ergibt sich der Knotenkraftvektor zu
(5.23)
und für die Veränderung des inneren Widerstandes gilt
(5.24)
Für den Tableau - Algorithmus wird das Anfangstableau wie folgt abgeändert (Bild 5.12)
ET
hkin
ET
E ET–----------------=
dεe
ε
σ
E
ET
dεp
dε
σ*ETdε=
dεedσ*
E---------=
dσ*
dεp---------
ETdε
dε dσ*
E---------–
---------------------ET
E ET–----------------E= =
hkin E=
εt εt t∆+
p
p p*+ k ae=
ae a ap–=
p ka 1 hkin+( ) k ap–=
W FT p– FTk a– 1 hkin+( ) FTkF λ+= =
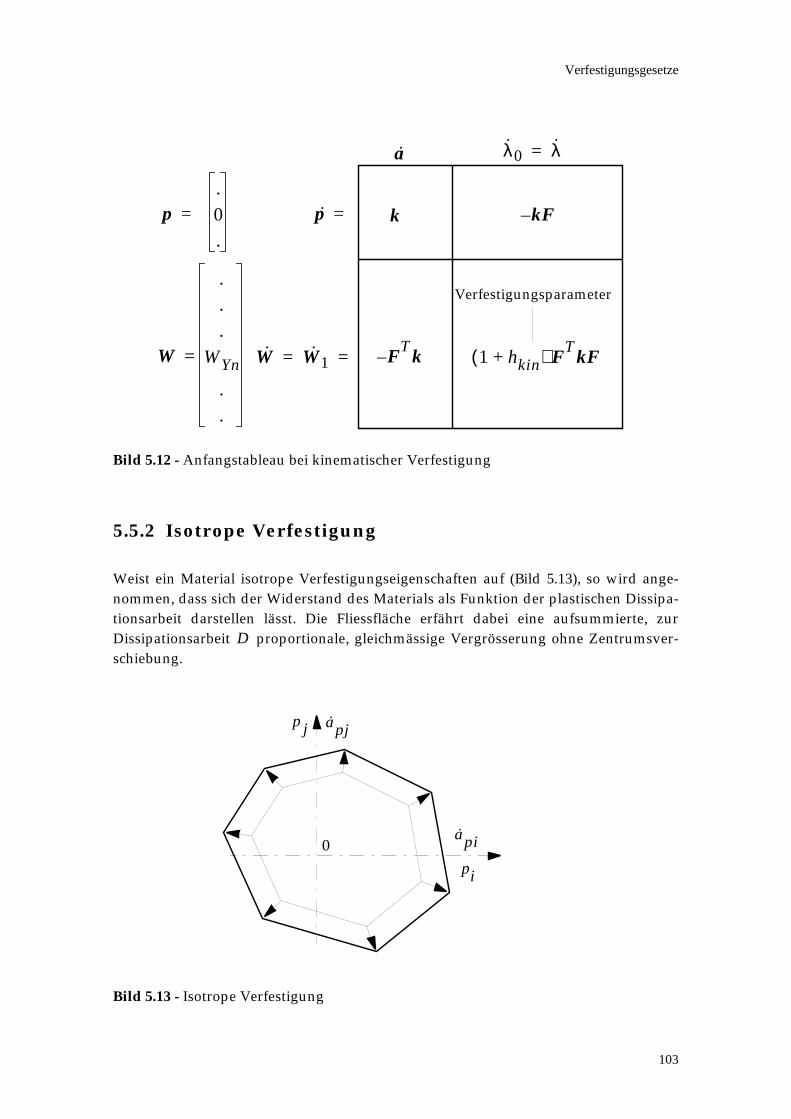
Verfestigungsgesetze
103
Bild 5.12 - Anfangstableau bei kinematischer Verfestigung
5.5.2 Isotrope Verfestigung
Weist ein Material isotrope Verfestigungseigenschaften auf (Bild 5.13), so wird ange-
nommen, dass sich der Widerstand des Materials als Funktion der plastischen Dissipa-
tionsarbeit darstellen lässt. Die Fliessfläche erfährt dabei eine aufsummierte, zur
Dissipationsarbeit proportionale, gleichmässige Vergrösserung ohne Zentrumsver-
schiebung.
Bild 5.13 - Isotrope Verfestigung
k kF–
FT
k– 1 hkin+( ) FT
kF
a λ0 λ=
p =
W W1= =
.
.
.
WYn
.
.
W =
.
0
.
p =
Verfestigungsparameter
D
pi
api
apjp j
0
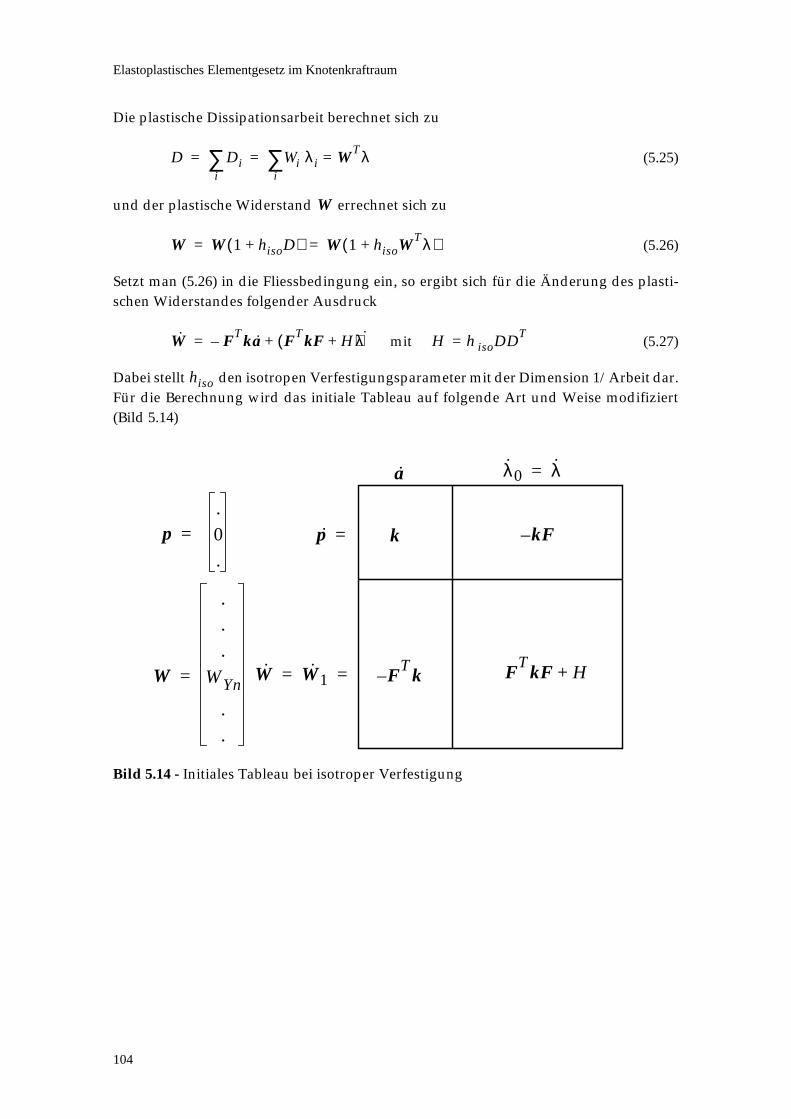
Elastoplastisches Elementgesetz im Knotenkraftraum
104
Die plastische Dissipationsarbeit berechnet sich zu
(5.25)
und der plastische Widerstand errechnet sich zu
(5.26)
Setzt man (5.26) in die Fliessbedingung ein, so ergibt sich für die Änderung des plasti-
schen Widerstandes folgender Ausdruck
mit (5.27)
Dabei stellt den isotropen Verfestigungsparameter mit der Dimension 1/Arbeit dar.
Für die Berechnung wird das initiale Tableau auf folgende Art und Weise modifiziert
(Bild 5.14)
Bild 5.14 - Initiales Tableau bei isotroper Verfestigung
D Dii
∑ Wi λi WTλ=i
∑= =
W
W W 1 hisoD+( ) W 1 hisoWTλ+( )= =
W FTka– FTkF H+( )λ+= H h isoDDT
=
hiso
k kF–
FT
k– FT
kF H+
a λ0 λ=
p =
W W1= =
.
.
.
WYn
.
.
W =
.
0
.
p =
105
6 Kinematische Bindungsgleichungen undihre Anwendungen
6.1 Numerische Behandlung
Bei Berechnungen nach der Methode der finiten Elemente tritt des öfteren die Notwen-
digkeit auf, bestimmten Knotenverschiebungsparametern gewisse Beschränkungen
oder Abhängigkeiten untereinander aufzuerlegen. Dies können Kontinuitätsbedingun-
gen, spezielle Werte gewisser Knotenverschiebungsparameter oder Bedingungen sein,
die zwischen den Knotenverschiebungsparametern erfüllt sein müssen, wie z.B. Punkt-
symmetrie oder besondere Kontinuitätsbedingungen bei der Modellierung von Unter-
zügen in Platten. Für die Berücksichtigung dieser Zwangsbedingungen in der
Berechnung wird meistens die Methode der Lagrangeschen Multiplikatoren oder das
Strafverfahren, auch als Penalty - Verfahren bezeichnet, verwendet (Anderheggen [2],
Tabatabai [29]).
Bei der numerischen Behandlung von Auflagern einer diskretisierten Struktur ergeben
sich kinematische Bindungsgleichungen in der Form
oder (6.1)
oder auch in der Form
(6.2)
Während (6.1) bei jeden nicht freien Knoten zur Anwendung kommt, d.h. der Freiheits-
grad des Lösungsvektors soll den Wert oder einen vorgegebenen Wert anneh-
men, findet (6.2) Anwendung für den nicht freien - Parameter, der eine
Linearkombination von freien - Parametern mit gegebenen - Koeffizienten ist.
Fasst man alle nicht freien Parameter zum Vektor und alle freien Parameter
zum Vektor mit zusammen, dann kann anstelle von (6.2) auch ge-
schrieben werden
(6.3)
oder
mit und (6.4)
Ai 0= Ai ∆=
Ai Wm Amm∑=
i A 0 ∆Ai
Am WmAi An Am
A f A An A f∪=
An W A f=
W A 0= W W– I= AA f
An
=
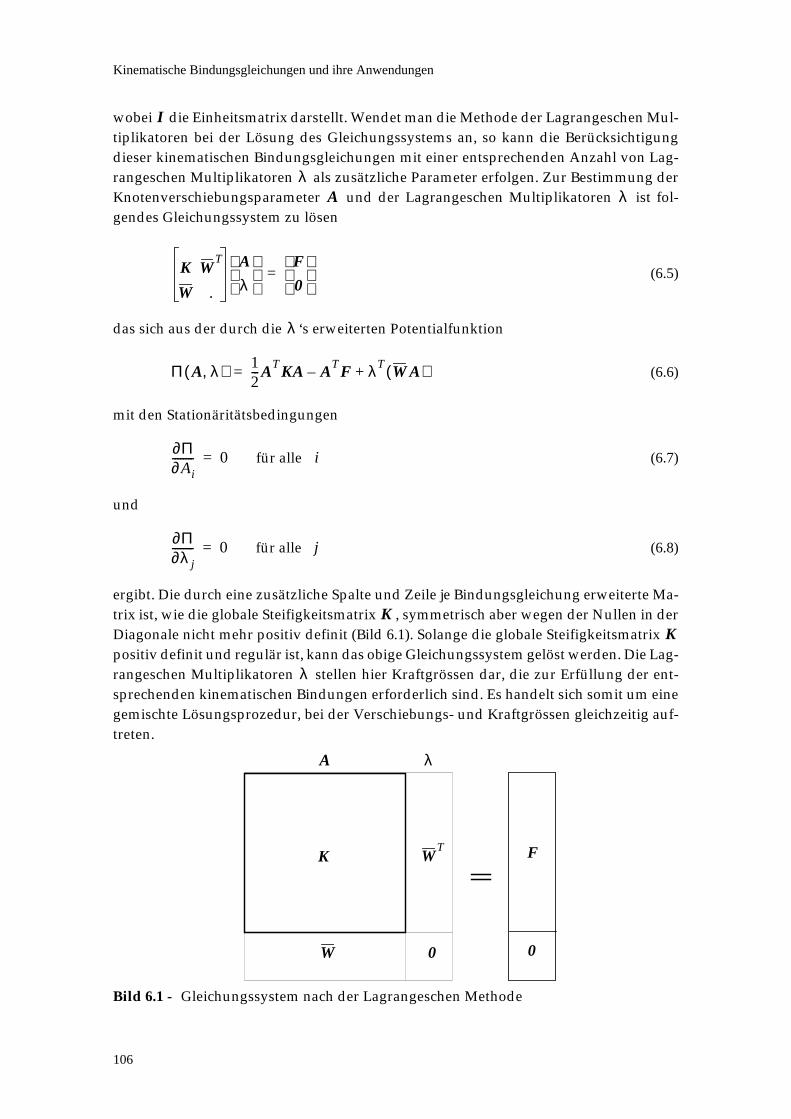
Kinematische Bindungsgleichungen und ihre Anwendungen
106
wobei die Einheitsmatrix darstellt. Wendet man die Methode der Lagrangeschen Mul-
tiplikatoren bei der Lösung des Gleichungssystems an, so kann die Berücksichtigung
dieser kinematischen Bindungsgleichungen mit einer entsprechenden Anzahl von Lag-
rangeschen Multiplikatoren als zusätzliche Parameter erfolgen. Zur Bestimmung der
Knotenverschiebungsparameter und der Lagrangeschen Multiplikatoren ist fol-
gendes Gleichungssystem zu lösen
(6.5)
das sich aus der durch die ‘s erweiterten Potentialfunktion
(6.6)
mit den Stationäritätsbedingungen
für alle (6.7)
und
für alle (6.8)
ergibt. Die durch eine zusätzliche Spalte und Zeile je Bindungsgleichung erweiterte Ma-
trix ist, wie die globale Steifigkeitsmatrix , symmetrisch aber wegen der Nullen in der
Diagonale nicht mehr positiv definit (Bild 6.1). Solange die globale Steifigkeitsmatrix
positiv definit und regulär ist, kann das obige Gleichungssystem gelöst werden. Die Lag-
rangeschen Multiplikatoren stellen hier Kraftgrössen dar, die zur Erfüllung der ent-
sprechenden kinematischen Bindungen erforderlich sind. Es handelt sich somit um eine
gemischte Lösungsprozedur, bei der Verschiebungs- und Kraftgrössen gleichzeitig auf-
treten.
Bild 6.1 - Gleichungssystem nach der Lagrangeschen Methode
I
λA λ
K WT
W .
A
λ F
0
=
λ
Π A λ,( ) 12--- ATKA ATF– λT W A( )+=
∂Π∂Ai-------- 0= i
∂Π∂λ j-------- 0= j
KK
λ
K WT
W 0
A λ
F
0

Numerische Behandlung
107
Bei der Lösung von (6.1) wird gerne vom Penalty- oder Strafverfahren ausgegangen mit
folgender Bestimmungsgleichung
(6.9)
die sich aus dem Potential
(6.10)
mit Hilfe der Stationäritätsbedingung (6.7) ermitteln lässt. Bei der Verwendung des
Strafverfahrens werden die vorgegebenen Verschiebungen erzwungen, in dem man
durch die Addition von bestimmten Werten zu den Elementen der Steifigkeitsmatrix
eine entsprechende Kraft hinzufügt, die dafür sorgt, dass die gesuchte Verschiebung der
vorgebenen Verschiebung entspricht (z.B. federnd gestütze Lagerungen, blockierte
Lagerungen). Die Wahl einer angemessenen Strafzahl ist von wesentlicher Bedeutung
für die Lösung des linearen Gleichungssystems. Bei der Wahl der Strafzahl ist auf die
Kondition der Matrix zu achten, da es sonst bei der numerischen Lösung zu Instabilitä-
ten kommen kann. Dieses Verfahren ist besonders effizient, weil keine zusätzlichen Glei-
chungen erforderlich sind, und auch die Grösse der globalen Steifigkeitsmatrix
unverändert bleibt. Die Bandbreite des Gleichungssystems wird dadurch ebenso nicht
beeinflusst.
Bei dem in dieser Arbeit verwendeten Verfahren erfolgt die Elimination der ‘s und der
abhängigen Knotenfreiheitsgrade zu einem Zeitpunkt, bevor das globale Glei-
chungssystem nach den freien Parametern gelöst wird.
Bild 6.2 - Unterteilung des globalen Gleichungssystems
Diese Elimination von und führt zu folgendem reduzierten symmetrischen und
positiv - definiten Gleichungssytem für die freien Verschiebungsparameter
K α+( )A F α∆+=
Π A( ) 12--- ATKA ATF–
α2--- A ∆–( )T A ∆–( )+=
∆
∆α
λAn
A f
K ff W–T
W– 0
A f λ
F f
0
An
K fn
Knf Knn
I
I Fn
An λA f
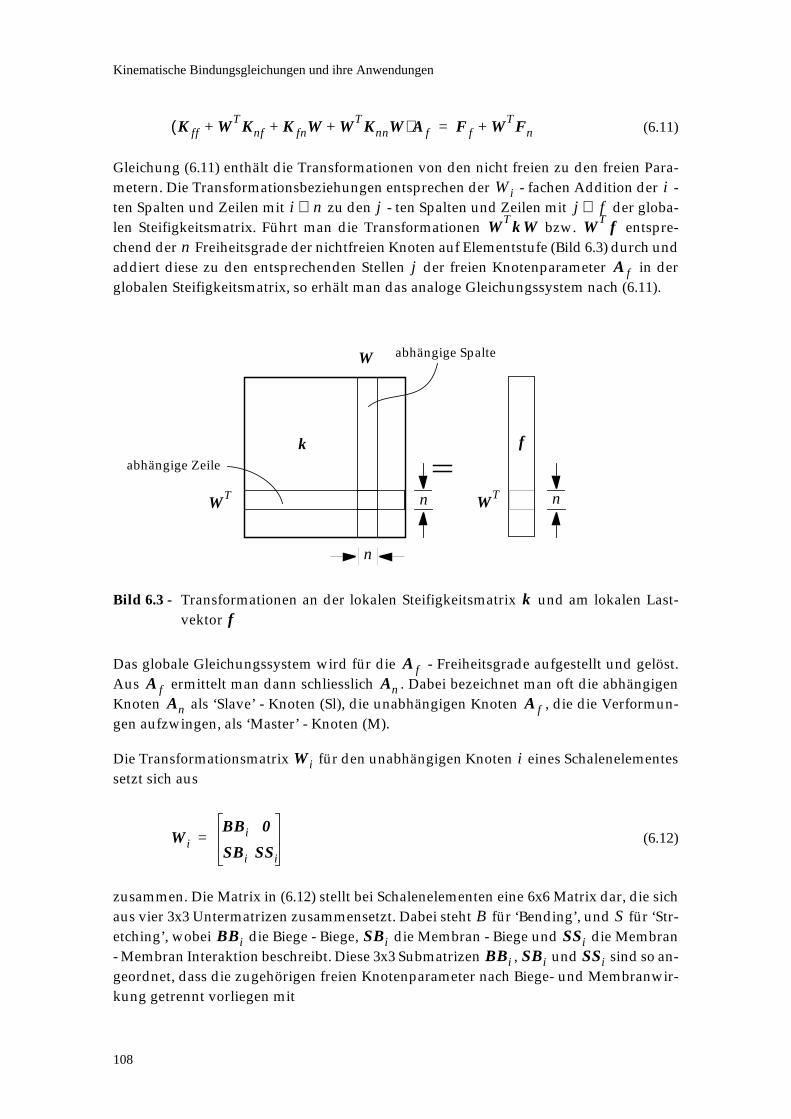
Kinematische Bindungsgleichungen und ihre Anwendungen
108
(6.11)
Gleichung (6.11) enthält die Transformationen von den nicht freien zu den freien Para-
metern. Die Transformationsbeziehungen entsprechen der - fachen Addition der -
ten Spalten und Zeilen mit zu den - ten Spalten und Zeilen mit der globa-
len Steifigkeitsmatrix. Führt man die Transformationen bzw. entspre-
chend der Freiheitsgrade der nichtfreien Knoten auf Elementstufe (Bild 6.3) durch und
addiert diese zu den entsprechenden Stellen der freien Knotenparameter in der
globalen Steifigkeitsmatrix, so erhält man das analoge Gleichungssystem nach (6.11).
Bild 6.3 - Transformationen an der lokalen Steifigkeitsmatrix und am lokalen Last-
vektor
Das globale Gleichungssystem wird für die - Freiheitsgrade aufgestellt und gelöst.
Aus ermittelt man dann schliesslich . Dabei bezeichnet man oft die abhängigen
Knoten als ‘Slave’ - Knoten (Sl), die unabhängigen Knoten , die die Verformun-
gen aufzwingen, als ‘Master’ - Knoten (M).
Die Transformationsmatrix für den unabhängigen Knoten eines Schalenelementes
setzt sich aus
(6.12)
zusammen. Die Matrix in (6.12) stellt bei Schalenelementen eine 6x6 Matrix dar, die sich
aus vier 3x3 Untermatrizen zusammensetzt. Dabei steht für ‘Bending’, und für ‘Str-
etching’, wobei die Biege - Biege, die Membran - Biege und die Membran
- Membran Interaktion beschreibt. Diese 3x3 Submatrizen , und sind so an-
geordnet, dass die zugehörigen freien Knotenparameter nach Biege- und Membranwir-
kung getrennt vorliegen mit
K ff WTKnf K fnW WTKnnW+ + +( )A f F f WTFn+=
Wi ii n∈ j j f∈
WTk W WT fn
j A f
k
WT
f
WT
W
abhängige Zeile
abhängige Spalte
n
nn
kf
A fA f An
An A f
Wi i
WiBBi 0
SBi SSi
=
B SBBi SBi SSi
BBi SBi SSi

Numerische Behandlung
109
(6.13)
wobei für die Rotationsfreiheitsgrade und für die Verschiebungsfreiheitsgrade
steht. Der zur Transformationsmatrix zugehörige freie Knotenverschiebungsvektor
nimmt dabei folgende Gestalt an
(6.14)
Da die abhängigen Knoten keinen Eintrag ins globale Gleichungssystem finden, wird die
äussere Belastung bei der Assemblierung auf die unabhängigen Knoten mit
umgerechnet. Nach der Lösung des Gleichungssystems für die unabhän-
gigen Verschiebungsfreiheitsgrade werden aus diesen die Verschiebungen für die ab-
hängigen Knoten rückgerechnet. Die Umrechnung der Belastung von den abhängigen
Knoten zu den unabhängigen Knoten und die danach folgende Rückrechnung der Ver-
schiebungen auf die abhängigen Knoten bilden die zwei wesentlichen Transformationen
dieses Verfahrens. Die Transformation der Knotenkräfte vom abhängigen Knoten
zu den unabhängigen Knoten erfolgt bei Biegung mit
(6.15)
und bei Membranbeanspruchung mit
(6.16)
und bei kombinierter Beanspruchung durch
(6.17)
Die Rückrechnung der Verschiebungen von den unabhängigen Knoten zu
den abhängigen Knoten erfolgt bei Biegebeanspruchung durch
(6.18)
bei Membranbeanspruchung
(6.19)
RX RY DZ DX DY RZ,,,,,
R DWi
A fi
A fi
Rxi
Ryi
Dzi
Dxi
Dyi
Rzi
=
F f W TFn=
F SlMi
FMi
B BBiT FSl
B=
FMi
S SSiT FSl
S=
FMi
B SBiT FSl
S=
i 1…q=
AnB B
i 1=
q
∑ Bi A f Mi
B=
AnS S
i 1=
q
∑ Si A f Mi
S=
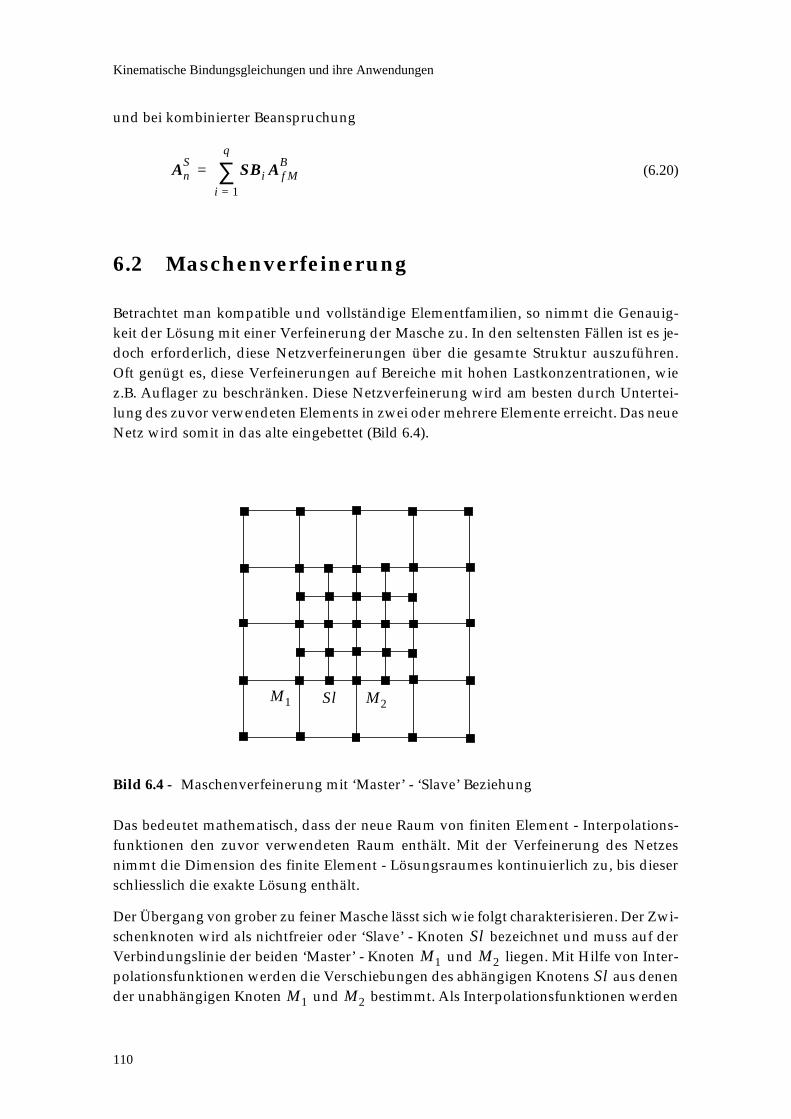
Kinematische Bindungsgleichungen und ihre Anwendungen
110
und bei kombinierter Beanspruchung
(6.20)
6.2 Maschenverfeinerung
Betrachtet man kompatible und vollständige Elementfamilien, so nimmt die Genauig-
keit der Lösung mit einer Verfeinerung der Masche zu. In den seltensten Fällen ist es je-
doch erforderlich, diese Netzverfeinerungen über die gesamte Struktur auszuführen.
Oft genügt es, diese Verfeinerungen auf Bereiche mit hohen Lastkonzentrationen, wie
z.B. Auflager zu beschränken. Diese Netzverfeinerung wird am besten durch Untertei-
lung des zuvor verwendeten Elements in zwei oder mehrere Elemente erreicht. Das neue
Netz wird somit in das alte eingebettet (Bild 6.4).
Bild 6.4 - Maschenverfeinerung mit ‘Master’ - ‘Slave’ Beziehung
Das bedeutet mathematisch, dass der neue Raum von finiten Element - Interpolations-
funktionen den zuvor verwendeten Raum enthält. Mit der Verfeinerung des Netzes
nimmt die Dimension des finite Element - Lösungsraumes kontinuierlich zu, bis dieser
schliesslich die exakte Lösung enthält.
Der Übergang von grober zu feiner Masche lässt sich wie folgt charakterisieren. Der Zwi-
schenknoten wird als nichtfreier oder ‘Slave’ - Knoten bezeichnet und muss auf der
Verbindungslinie der beiden ‘Master’ - Knoten und liegen. Mit Hilfe von Inter-
polationsfunktionen werden die Verschiebungen des abhängigen Knotens aus denen
der unabhängigen Knoten und bestimmt. Als Interpolationsfunktionen werden
AnS S
i 1=
q
∑ Bi A f MB
=
M1 M2Sl
SlM1 M2
SlM1 M2

Maschenverfeinerung
111
hier die üblichen Ansatzfunktionen (Hermitsche Polynome) für den Balken entlang der
Elementseiten verwendet.
Bild 6.5 - ‘Master’ - ‘Slave’ - Beziehung im unrotierten Koordinatensystem mit den zu-
gehörigen Knotenparametern zufolge Membran- und Biegebeanspruchung
In einem nicht rotierten Koordinatensystem zwingt der erste ‘Master’ - Knoten den
Membranzustand
(6.21)
und den Biegezustand
(6.22)
der zweite ‘Master’ - Knoten den Membranzustand
(6.23)
und den Biegezustand
x
ξ 0= ξxsl
l------=
M1 Sl M2
l
xsl
ξ 1= M1RX
RY
DZ
RZ
DY
DX
Membran
Biegung
M1
M1
SS1
1 ξ– . .
. 1 3ξ2– 2ξ3
+ ξ 2ξ2– ξ3
+( )l
.6ξ– 6ξ2
+l
-------------------------- 1 4ξ– 3ξ2+
=
BB1
1 ξ– . .
. 1 4ξ– 3ξ2+ 6ξ– 6ξ2
+l
--------------------------–
. ξ 2ξ2– ξ3
+( )l– 1 3ξ2– 2ξ3
+
=
SS2
ξ . .
. 3ξ22– ξ3 ξ2
– ξ3+( )l
.6ξ 6ξ2
–l
------------------ 2ξ– 3ξ2+
=

Kinematische Bindungsgleichungen und ihre Anwendungen
112
(6.24)
dem ‘Slave’ - Knoten auf, wobei ist. Mit bezeichnet man den Abstand der bei-
den unabhängigen Knoten und mit die Position des abhängigen Knotens (Bild 6.4).
So lässt sich die Bestimmungsgleichung mit
und (6.25)
für den ‘Slave’ - Knoten mit seinen abhängigen Parametern wie folgt angeben
(6.26)
mit den Knotenfreiheitsgraden
und (6.27)
für die unabhängigen Knoten (‘Master’ - Knoten) und .
Bild 6.6 - ‘Master’ - ‘Slave’ - Beziehung im rotierten Koordinatensystem
Fällt die Richtung der - Koordinate nicht mit der globalen Koordinatenrichtung zu-
BB2
ξ . .
. 2ξ– 3ξ2+ 6ξ 6ξ2
–( )l
-------------------------–
. ξ2– ξ3
+( )l– 3ξ22ξ3
–
=
ξxsl
l------= l
xsl
W1BB1 0
0 SS1
= W2BB2 0
0 SS2
=
Sl An
An W1 W2
A f 1
A f 2
=
A f 1
Rx1
Ry1
Dz1
Dx1
Dy1
Rz1
= A f 2
Rx2
Ry2
Dz2
Dx2
Dy2
Rz2
=
M1 M2
ξxsl
l------=
ξ 0=
ξ 1=
M1
M2
Sl
l
x
δ
xsl
ξ
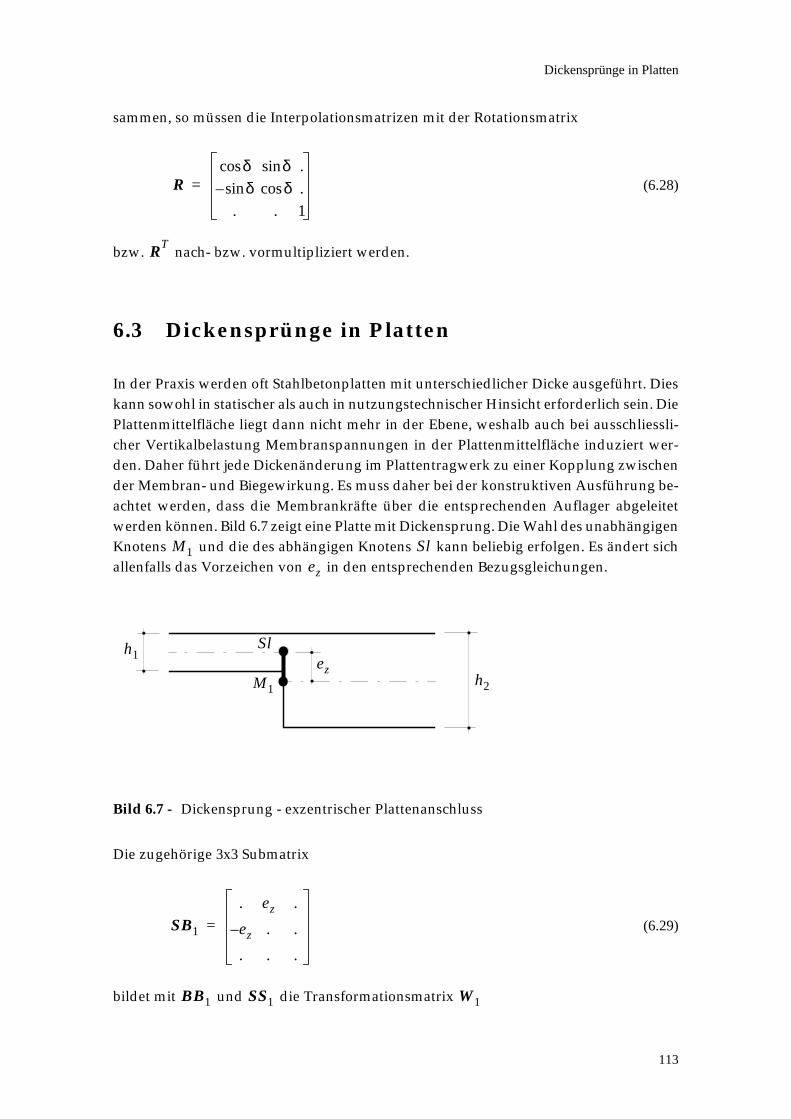
Dickensprünge in Platten
113
sammen, so müssen die Interpolationsmatrizen mit der Rotationsmatrix
(6.28)
bzw. nach- bzw. vormultipliziert werden.
6.3 Dickensprünge in Platten
In der Praxis werden oft Stahlbetonplatten mit unterschiedlicher Dicke ausgeführt. Dies
kann sowohl in statischer als auch in nutzungstechnischer Hinsicht erforderlich sein. Die
Plattenmittelfläche liegt dann nicht mehr in der Ebene, weshalb auch bei ausschliessli-
cher Vertikalbelastung Membranspannungen in der Plattenmittelfläche induziert wer-
den. Daher führt jede Dickenänderung im Plattentragwerk zu einer Kopplung zwischen
der Membran- und Biegewirkung. Es muss daher bei der konstruktiven Ausführung be-
achtet werden, dass die Membrankräfte über die entsprechenden Auflager abgeleitet
werden können. Bild 6.7 zeigt eine Platte mit Dickensprung. Die Wahl des unabhängigen
Knotens und die des abhängigen Knotens kann beliebig erfolgen. Es ändert sich
allenfalls das Vorzeichen von in den entsprechenden Bezugsgleichungen.
Bild 6.7 - Dickensprung - exzentrischer Plattenanschluss
Die zugehörige 3x3 Submatrix
(6.29)
bildet mit und die Transformationsmatrix
Rδcos δsin .
δsin– δcos .
. . 1
=
RT
M1 Slez
ez
h1
h2
Sl
M1
SB1
. ez .
ez– . .
. . .
=
BB1 SS1 W1
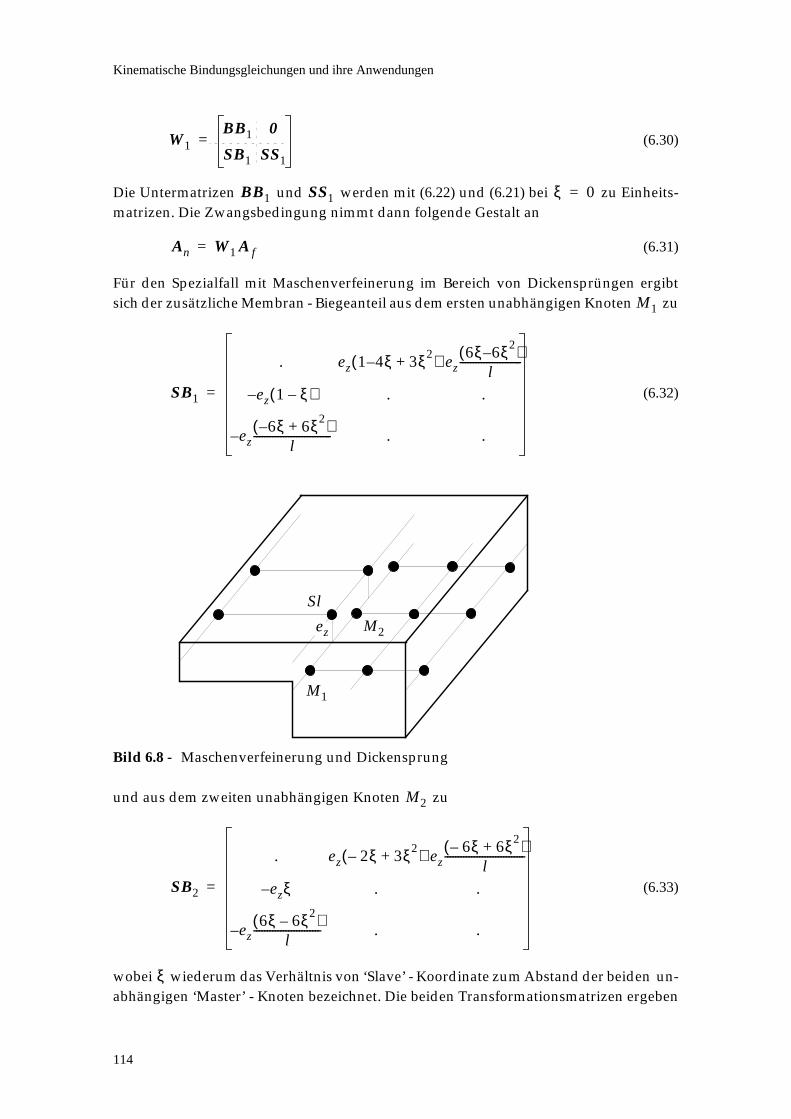
Kinematische Bindungsgleichungen und ihre Anwendungen
114
(6.30)
Die Untermatrizen und werden mit (6.22) und (6.21) bei zu Einheits-
matrizen. Die Zwangsbedingung nimmt dann folgende Gestalt an
(6.31)
Für den Spezialfall mit Maschenverfeinerung im Bereich von Dickensprüngen ergibt
sich der zusätzliche Membran - Biegeanteil aus dem ersten unabhängigen Knoten zu
(6.32)
Bild 6.8 - Maschenverfeinerung und Dickensprung
und aus dem zweiten unabhängigen Knoten zu
(6.33)
wobei wiederum das Verhältnis von ‘Slave’ - Koordinate zum Abstand der beiden un-
abhängigen ‘Master’ - Knoten bezeichnet. Die beiden Transformationsmatrizen ergeben
W1BB1 0
SB1 SS1
=
BB1 SS1 ξ 0=
An W1 A f=
M1
SB1
. ez 1 4ξ– 3ξ2+( ) ez
6ξ 6– ξ2( )l
-----------------------
ez 1 ξ–( )– . .
ez6– ξ 6ξ2
+( )l
-----------------------------– . .
=
M1
M2
Sl
ez
M2
SB2
. ez 2ξ– 3ξ2+( ) ez
6ξ– 6ξ2+( )l
------------------------------
ezξ– . .
ez6ξ 6ξ2
–( )l
-------------------------– . .
=
ξ
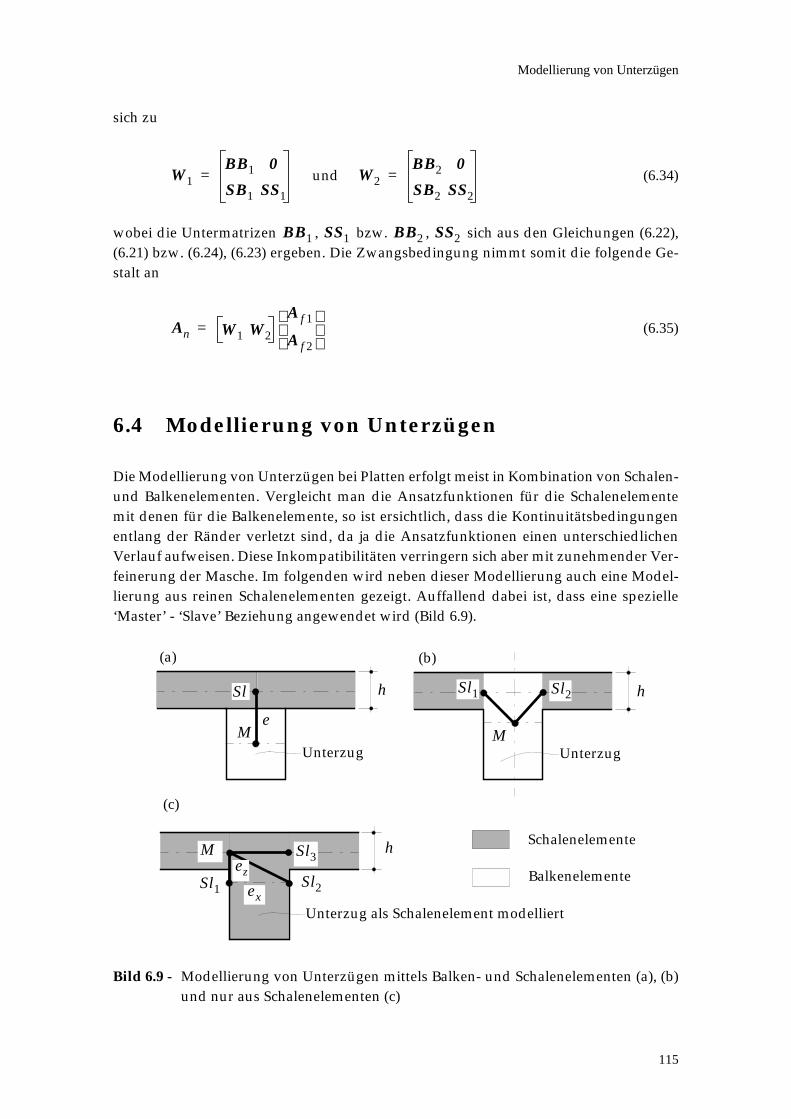
Modellierung von Unterzügen
115
sich zu
und (6.34)
wobei die Untermatrizen , bzw. , sich aus den Gleichungen (6.22),
(6.21) bzw. (6.24), (6.23) ergeben. Die Zwangsbedingung nimmt somit die folgende Ge-
stalt an
(6.35)
6.4 Modellierung von Unterzügen
Die Modellierung von Unterzügen bei Platten erfolgt meist in Kombination von Schalen-
und Balkenelementen. Vergleicht man die Ansatzfunktionen für die Schalenelemente
mit denen für die Balkenelemente, so ist ersichtlich, dass die Kontinuitätsbedingungen
entlang der Ränder verletzt sind, da ja die Ansatzfunktionen einen unterschiedlichen
Verlauf aufweisen. Diese Inkompatibilitäten verringern sich aber mit zunehmender Ver-
feinerung der Masche. Im folgenden wird neben dieser Modellierung auch eine Model-
lierung aus reinen Schalenelementen gezeigt. Auffallend dabei ist, dass eine spezielle
‘Master’ - ‘Slave’ Beziehung angewendet wird (Bild 6.9).
Bild 6.9 - Modellierung von Unterzügen mittels Balken- und Schalenelementen (a), (b)
und nur aus Schalenelementen (c)
W1BB1 0
SB1 SS1
= W2BB2 0
SB2 SS2
=
BB1 SS1 BB2 SS2
An W1 W2
A f 1
A f 2
=
Sl
M
h
Unterzug
e
Unterzug
h
M
Sl1 Sl2
Schalenelemente
Balkenelemente
(a) (b)
Unterzug als Schalenelement modelliert
(c)
hM
Sl1 Sl2
Sl3
ex
ez

Kinematische Bindungsgleichungen und ihre Anwendungen
116
Betrachtet man die Modellierung nach Bild 6.9-c mit Schalenelementen, so lässt sich die
Transformationsmatrix zwischen dem abhängigen Knoten und dem unabhängigen
Knoten mit
(6.36)
angeben. Die Transformationsmatrizen für und können aus (6.36) abgeleitet
werden. Vergleichsrechnungen haben gezeigt, dass die Modelle nach Bild 6.9-b und
nach Bild 6.9-c sehr gute und übereinstimmende Ergebnisse in den Verschiebungen lie-
fern können, während die Modellierung nach Bild 6.9-a sehr stark abweichende Ergeb-
nisse ergab. Dieses Modell verletzt die Kompatibilität und ist damit im Vergleich mit den
beiden anderen Modellierungsarten zu weich. Daher betrug auch der Unterschied in den
Verformungen zu den beiden anderen Modellierungen bis zu 50%. Das reine Schalen-
modell mit der etwas ungewöhnlichen Kombination von abhängigen und unabhängigen
Knoten, weist den Vorteil auf, dass ein und dieselbe Elementfamilie verwendet wird.
Aus diesem Grunde wurde auch in diesem Projekt das reine Schalenmodell verwendet.
Das System macht in Längsrichtung die Verformungen mit, während es in Querrichtung
sehr steif ist. Auch zufolge einer Torsionsbeanspruchung lieferte dieses Modell sehr gu-
te, mit dem Modell nach Bild 6.9-b übereinstimmende Ergebnisse. Der hohe Modellie-
rungsaufwand und die Eingabe des komplizierten Abhängigkeitsverhältnisses
zwischen den ‘Master’ - und ‘Slave’ - Knoten wirken sich bei diesem Schalenmodell al-
lerdings nachteilig aus.
Abschliessend sei noch die etwas ungewöhnliche Modellierung der Unterzüge aus or-
thotropen Plattenelementen erwähnt (Cubus [11]), da mit Plattenelementen keine Mem-
branwirkungen mitberücksichtigt werden können. Dabei wird die Orthotropie über die
Elastizitätsmatrix berücksichtigt. Unterzugselemente in Längsrichtung weisen die volle
Steifigkeit auf und in Querrichtung wird zur Steifigkeitsermittlung die Plattendicke ver-
wendet.
Sl2M
RxSl2
RySl2
DzSl2
DxSl2
DySl2
RzSl2
1 . . . . .
. 1 . . . .
. ex– 1 . . .
. ez . 1 . .
ez– . . . 1 ex
. . . . . 1
RxM
RyM
DzM
DxM
DyM
RzM
=
Sl2 Sl3
117
7 Implementierung
7.1 Die Programmstruktur
Das Programm IANA (‘Incremental ANAlysis’) wurde dazu entwickelt, um nichtlineare
Berechnungen an Platten und ebenen Schalentragwerken durchzuführen, mit dem Ziel,
neben der Ermittlung der Traglast noch eine Aussage über die Verformungen und einen
Nachweis der Duktilität zu erhalten. IANA ist eines von vier Projekten, von denen drei
zum Ziel hatten, das Stahlgewicht in Stahlbetonkonstruktionen (Scheiben, Platten und
Faltwerke) zu minimieren (Despot [12], Steffen [27], Tabatabai [29]). Bei dieser Minimie-
rung werden weder die Verformungen noch die Duktilitätsanforderungen für die ver-
wendeten Betonstähle kontrolliert. Dieser Nachteil wird mit dem vorliegenden
Programmmodul beseitigt. IANA kann sowohl als spezieller Modul zusammen mit dem
Bemessungsmodul in einem Programmpaket, als auch als eigenständiges Programm zur
Analyse von bereits bestehenden Stahlbetonplatten verwendet werden. Es erlaubt ne-
ben der Berechnung von Platten auch die Berechnung von Schalen nach der Theorie klei-
ner oder grosser Verformungen. Zusätzliche Hilfswerkzeuge wie die
Maschenverfeinerung und die Modellierung von Unterzügen ergänzen das Programm.
Die Schritte, die zu einem finiten Element Modell in IANA führen, sind im Bild 7.1 er-
sichtlich. Zu Beginn einer finiten Element - Berechnung werden die allgemeinen Daten
über eine vom Benutzer spezifizierte Struktur als ASCII - Textdatei eingelesen. Diese all-
gemeinen Daten umfassen die Koordinaten des Berandungspolygons, Typ (Platte oder
Schale) und Dicke der Struktur und die Eigenschaften der verwendeten Materialien (Ela-
stizitätsmodul, Festigkeitskennwerte für Beton und Stahl). Aufgrund dieser Daten wird
eine finite Element Masche generiert, die aus Dreieck- und Viereckelementen besteht.
Dabei wird das Umrisspolygon bzw. das Zonenpolygon (eine Zone beschreibt einen
Strukturbereich mit gleichen Charakteristika) in sogenannte Makroelemente unterteilt,
aus denen schliesslich die einzelnen Knoten mit deren Elementen generiert werden.
Der Benutzer kann bereits in diesem Schritt interaktiv eingreifen und die Generierung
der Masche bzw. Verfeinerungen am Bildschirm steuern. Ist der Generierungsvorgang
abgeschlossen, so werden die Lagerungsbedingungen und die externen Lastfälle bzw.
die Lastfallkombinationen eingegeben. Die Definition der Bewehrungsfelder kann auf
zweierlei Arten erfolgen und steht im direkten Zusammenhang zur Berechnungsart. Bei
Neubauten kann für Platten die Definition der Bewehrungsfelder mit Hilfe des Bemes-
sungsmoduls erfolgen. Aus den Grenzzuständen der Belastung ermittelt der lineare Pro-
grammteil den Bewehrungsbedarf der Stahlbetonstruktur. Der Benutzer erhält daraus
eine Übersicht, in welcher Region der höchste Bewehrungsbedarf auftritt, und kann aus-
serdem die Grösse der einzelnen Bewehrungszonen abschätzen, bzw. die Anzahl von
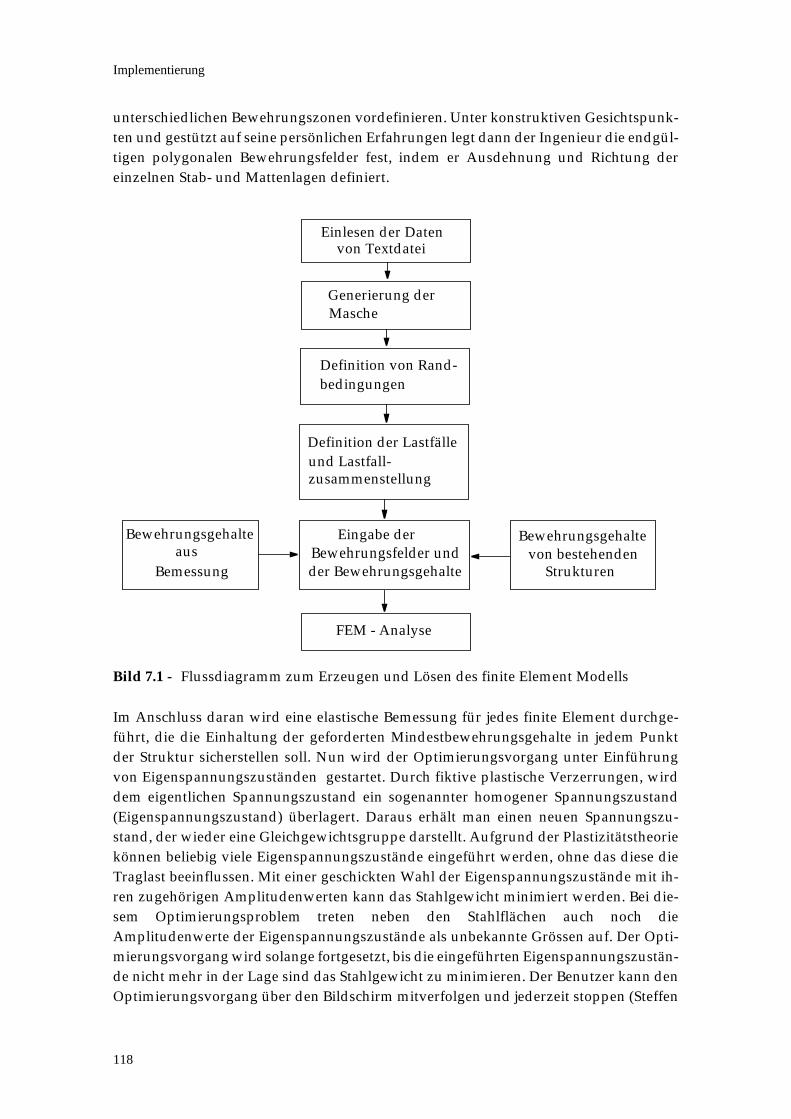
Implementierung
118
unterschiedlichen Bewehrungszonen vordefinieren. Unter konstruktiven Gesichtspunk-
ten und gestützt auf seine persönlichen Erfahrungen legt dann der Ingenieur die endgül-
tigen polygonalen Bewehrungsfelder fest, indem er Ausdehnung und Richtung der
einzelnen Stab- und Mattenlagen definiert.
Bild 7.1 - Flussdiagramm zum Erzeugen und Lösen des finite Element Modells
Im Anschluss daran wird eine elastische Bemessung für jedes finite Element durchge-
führt, die die Einhaltung der geforderten Mindestbewehrungsgehalte in jedem Punkt
der Struktur sicherstellen soll. Nun wird der Optimierungsvorgang unter Einführung
von Eigenspannungszuständen gestartet. Durch fiktive plastische Verzerrungen, wird
dem eigentlichen Spannungszustand ein sogenannter homogener Spannungszustand
(Eigenspannungszustand) überlagert. Daraus erhält man einen neuen Spannungszu-
stand, der wieder eine Gleichgewichtsgruppe darstellt. Aufgrund der Plastizitätstheorie
können beliebig viele Eigenspannungszustände eingeführt werden, ohne das diese die
Traglast beeinflussen. Mit einer geschickten Wahl der Eigenspannungszustände mit ih-
ren zugehörigen Amplitudenwerten kann das Stahlgewicht minimiert werden. Bei die-
sem Optimierungsproblem treten neben den Stahlflächen auch noch die
Amplitudenwerte der Eigenspannungszustände als unbekannte Grössen auf. Der Opti-
mierungsvorgang wird solange fortgesetzt, bis die eingeführten Eigenspannungszustän-
de nicht mehr in der Lage sind das Stahlgewicht zu minimieren. Der Benutzer kann den
Optimierungsvorgang über den Bildschirm mitverfolgen und jederzeit stoppen (Steffen
Einlesen der Datenvon Textdatei
Generierung der
Masche
Definition von Rand-
bedingungen
Definition der Lastfälle
und Lastfall-
zusammenstellung
der Bewehrungsgehalte
FEM - Analyse
Eingabe der
Bewehrungsfelder und
Bewehrungsgehalte
aus
Bemessung
Bewehrungsgehalte
von bestehenden
Strukturen
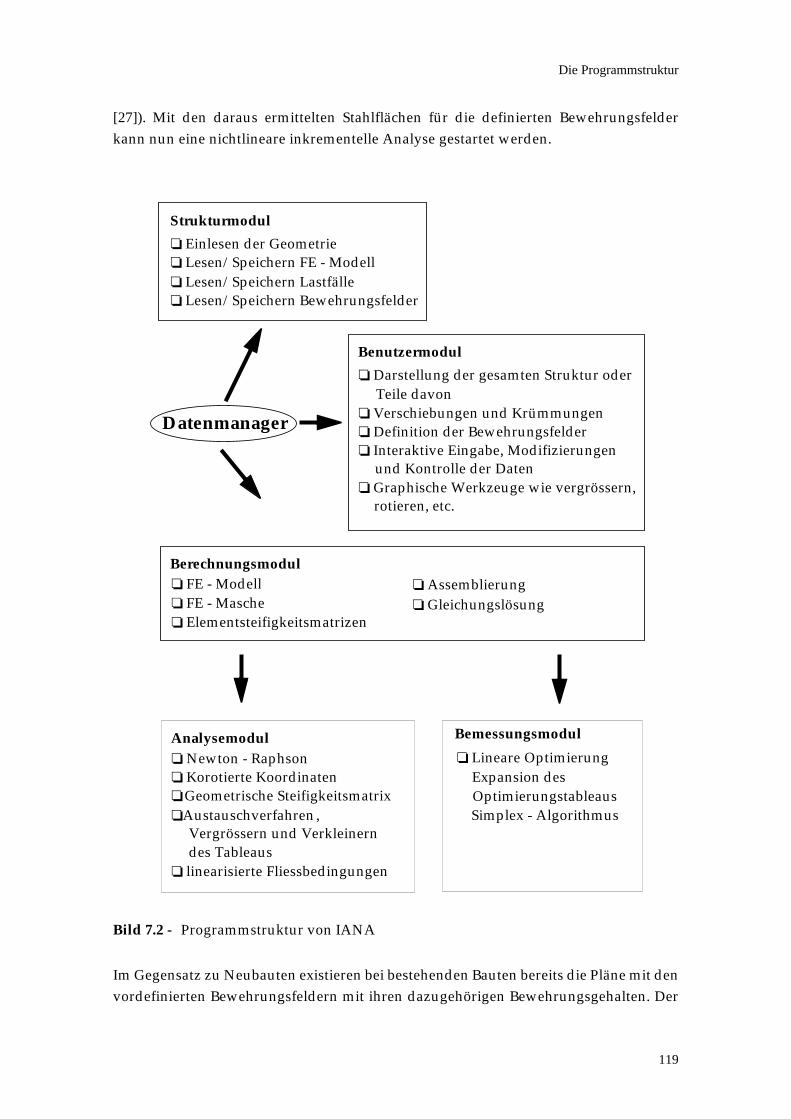
Die Programmstruktur
119
[27]). Mit den daraus ermittelten Stahlflächen für die definierten Bewehrungsfelder
kann nun eine nichtlineare inkrementelle Analyse gestartet werden.
Bild 7.2 - Programmstruktur von IANA
Im Gegensatz zu Neubauten existieren bei bestehenden Bauten bereits die Pläne mit den
vordefinierten Bewehrungsfeldern mit ihren dazugehörigen Bewehrungsgehalten. Der
Strukturmodul
Einlesen der Geometrie
Lesen/Speichern FE - Modell
Lesen/Speichern Lastfälle
Lesen/Speichern Bewehrungsfelder
Benutzermodul
Darstellung der gesamten Struktur oder
Teile davon
Verschiebungen und Krümmungen
Definition der Bewehrungsfelder
Interaktive Eingabe, Modifizierungen
und Kontrolle der Daten
Graphische Werkzeuge wie vergrössern,
rotieren, etc.
FE - Modell
FE - Masche
Elementsteifigkeitsmatrizen
Assemblierung
Gleichungslösung
Datenmanager
Austauschverfahren ,
des Tableaus
linearisierte Fliessbedingungen
Vergrössern und Verkleinern
Analysemodul Bemessungsmodul
Newton - Raphson
Korotierte Koordinaten
Geometrische Steifigkeitsmatrix
Lineare Optimierung
Expansion des
Optimierungstableaus
Simplex - Algorithmus
Berechnungsmodul
Implementierung
120
Benutzer gibt alle bekannten Daten über die graphische Schnittstelle ein und kann im
Anschluss daran sofort die nichtlineare inkrementelle Analyse starten. Alle Eingabeda-
ten können auch auf ASCII - Dateien gespeichert werden. Es steht dem Benutzer frei, die-
se Daten interaktiv oder durch editieren der Dateien abzuändern.
Ist erst die inkrementelle Analyse gestartet, so kann der schrittweise iterative Lösungs-
prozess in Echtzeit am Bildschirm mitverfolgt werden. In jedem Lastschritt können die
Verformungen und die plastischen Krümmungen im Element sowie die Ausbildung der
Fliessgelenklinien angezeigt werden. Der Benutzer kann jederzeit den Lösungsprozess
stoppen, wieder fortsetzen oder zum Ausgangs- bzw. Startpunkt zurückkehren. Dabei
wird der Lastschritt in Abhängigkeit der Iterationsanzahl vom Programm selbständig
festgelegt, und zwar so, dass bei Überschreitung einer Grenzzahl die Lastschrittweite
automatisch halbiert wird, bis das Konvergenzkriterium erfüllt ist.
Das Programm IANA besteht aus drei getrennten Teilen, die untereinander ihre Daten
durch einen ‘Datenmanager’ austauschen (Bild 7.2). Dies ist der Strukturmodul, der für
die Bereitstellung der Daten aus den Dateien und für das Speichern der Ergebnisse als
ASCII - Textdateien verantwortlich ist. Dem Ingenieur ist es somit möglich, die bereits
berechneten Strukturen zu bearbeiten und mit abgeänderten Parametern neu zu berech-
nen. Der Benutzermodul stellt die Schnittstelle zwischen dem Programm und seinem Be-
nutzer dar. Hier kann der Berechnungsablauf (siehe Anhang A) visuell mitverfolgt
werden. Je nach Aktivierung der entsprechenden Felder kann das Gewünschte am Bild-
schirm dargestellt werden (z.B. Strukturverformung, plastische Krümmungen). Auch
Eingabedaten oder Daten zur Berechnung werden über diesen Modul zum Struktur-
oder zum Berechnungsmodul transferriert. Der Berechnungsmodul lässt sich in zwei
weitere Module aufspalten, in Analyse- und in Bemessungsmodul. Der Analysemodul
wurde in der objektorientierten Programmiersprache C++ geschrieben (Lippman [19],
Stroustrup [28]), während die restlichen Programmteile in der Programmiersprache C
(Kernighan/Ritchie [17]) geschrieben wurden. Der Analysemodul verwaltet seine Daten
selbst, während Struktur-, Benutzer- und Bemessungsmodul einen Datenmanager für
die Verwaltung ihrer Daten benötigen. Der Datenaustausch zwischen den Programmtei-
len in C++ und in C erfolgt über ein Interface, das selbst in C++ geschrieben ist und C -
Funktionen enthält (Bild 7.3).
Im Gegensatz zu C findet in C++ eine Datenkapselung statt. Jede Kapselung wird als
eine Einheit für sich betrachtet und wird hier als Klasse bezeichnet. Jede Klasse enthält
ihre eigenen Variablen und Funktionen, oft auch als Methoden bezeichnet. In Bild 7.3 ist
die Struktur von IANA aufgezeigt. Alle dargestellten Klassen beginnen mit dem Kürzel
‘Cl’ für ‘class’. ‘ClIncAnalysis’ enthält alle Methoden zur Steuerung des Programmab-
laufs und verwaltet auch die einzelnen Objekte. Als Objekte (Instanzen) bezeichnet man
Variablen vom Typ ‘class’. ‘ClIncAnalysis’ erzeugt für jedes finite Element ein Objekt aus
der Klasse ‘ClReinUnit’ (‘class reinforced Unit’) und weist diesem die für ein finites Ele-
ment relevanten Daten über das Interface zu. Jedes Objekt aus der Klasse ‘ClReinUnit’
enthält seine eigenen Daten, wie z.B. Steifigkeitsmatrix, internen Knotenkraftvektor, lo-
kale Elementverschiebungen, linearisierte Fliessbedingungen. ‘ClGeoUnit’ ist eine abge-
leitete Klasse aus ‘ClReinUnit’ und ist für die Berechnung der geometrischen
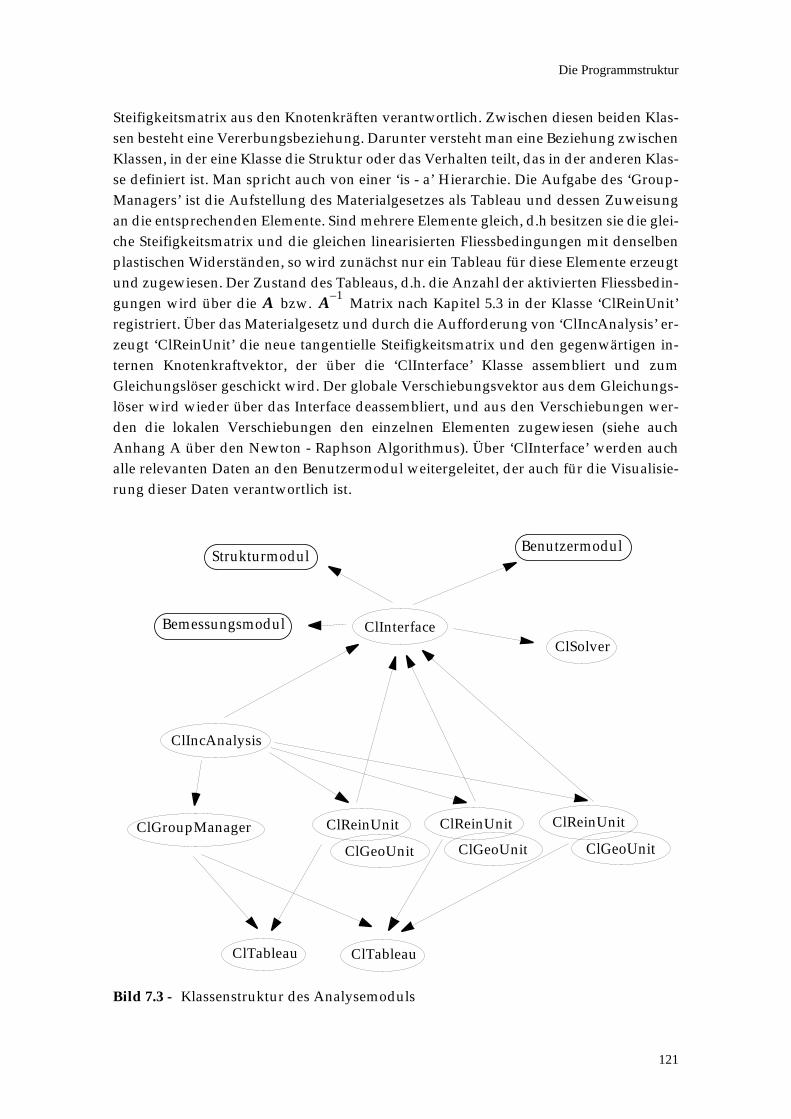
Die Programmstruktur
121
Steifigkeitsmatrix aus den Knotenkräften verantwortlich. Zwischen diesen beiden Klas-
sen besteht eine Vererbungsbeziehung. Darunter versteht man eine Beziehung zwischen
Klassen, in der eine Klasse die Struktur oder das Verhalten teilt, das in der anderen Klas-
se definiert ist. Man spricht auch von einer ‘is - a’ Hierarchie. Die Aufgabe des ‘Group-
Managers’ ist die Aufstellung des Materialgesetzes als Tableau und dessen Zuweisung
an die entsprechenden Elemente. Sind mehrere Elemente gleich, d.h besitzen sie die glei-
che Steifigkeitsmatrix und die gleichen linearisierten Fliessbedingungen mit denselben
plastischen Widerständen, so wird zunächst nur ein Tableau für diese Elemente erzeugt
und zugewiesen. Der Zustand des Tableaus, d.h. die Anzahl der aktivierten Fliessbedin-
gungen wird über die bzw. Matrix nach Kapitel 5.3 in der Klasse ‘ClReinUnit’
registriert. Über das Materialgesetz und durch die Aufforderung von ‘ClIncAnalysis’ er-
zeugt ‘ClReinUnit’ die neue tangentielle Steifigkeitsmatrix und den gegenwärtigen in-
ternen Knotenkraftvektor, der über die ‘ClInterface’ Klasse assembliert und zum
Gleichungslöser geschickt wird. Der globale Verschiebungsvektor aus dem Gleichungs-
löser wird wieder über das Interface deassembliert, und aus den Verschiebungen wer-
den die lokalen Verschiebungen den einzelnen Elementen zugewiesen (siehe auch
Anhang A über den Newton - Raphson Algorithmus). Über ‘ClInterface’ werden auch
alle relevanten Daten an den Benutzermodul weitergeleitet, der auch für die Visualisie-
rung dieser Daten verantwortlich ist.
Bild 7.3 - Klassenstruktur des Analysemoduls
A A 1–
ClInterface
ClIncAnalysis
ClReinUnit ClReinUnit ClReinUnit
ClSolver
ClTableau ClTableau
ClGroupManager
ClGeoUnit ClGeoUnit ClGeoUnit
Benutzermodul
Bemessungsmodul
Strukturmodul
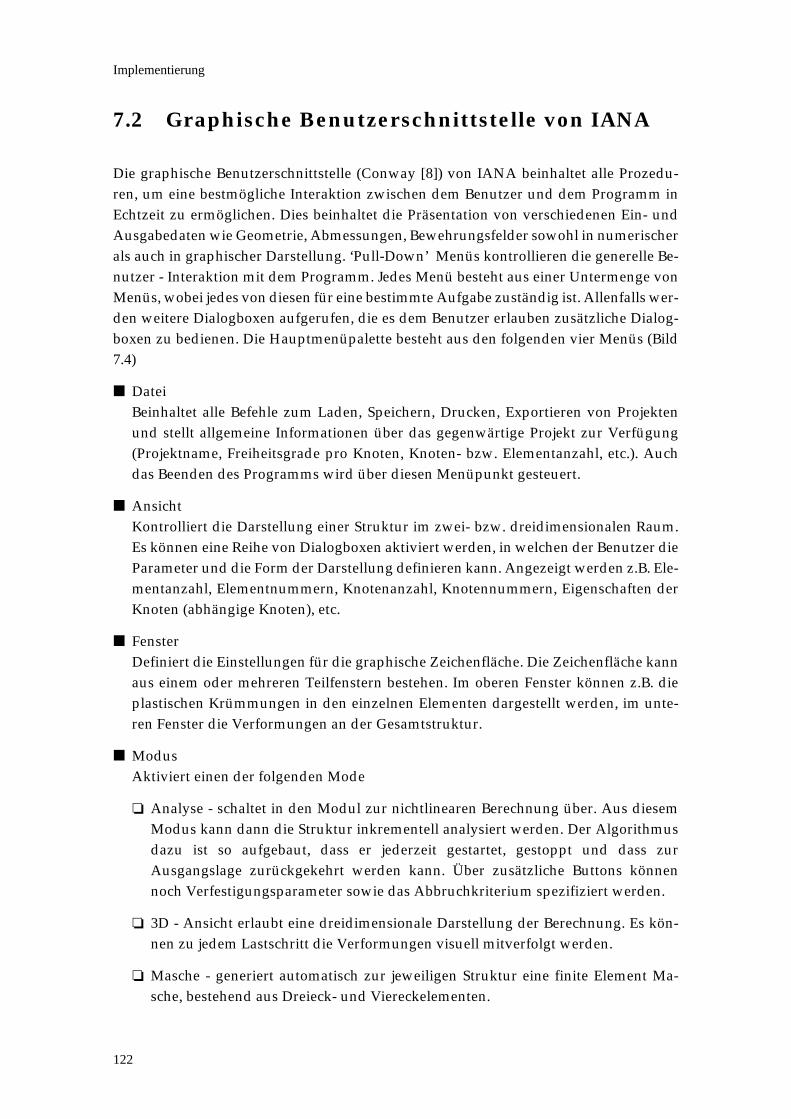
Implementierung
122
7.2 Graphische Benutzerschnittstelle von IANA
Die graphische Benutzerschnittstelle (Conway [8]) von IANA beinhaltet alle Prozedu-
ren, um eine bestmögliche Interaktion zwischen dem Benutzer und dem Programm in
Echtzeit zu ermöglichen. Dies beinhaltet die Präsentation von verschiedenen Ein- und
Ausgabedaten wie Geometrie, Abmessungen, Bewehrungsfelder sowohl in numerischer
als auch in graphischer Darstellung. ‘Pull-Down’ Menüs kontrollieren die generelle Be-
nutzer - Interaktion mit dem Programm. Jedes Menü besteht aus einer Untermenge von
Menüs, wobei jedes von diesen für eine bestimmte Aufgabe zuständig ist. Allenfalls wer-
den weitere Dialogboxen aufgerufen, die es dem Benutzer erlauben zusätzliche Dialog-
boxen zu bedienen. Die Hauptmenüpalette besteht aus den folgenden vier Menüs (Bild
7.4)
Datei
Beinhaltet alle Befehle zum Laden, Speichern, Drucken, Exportieren von Projekten
und stellt allgemeine Informationen über das gegenwärtige Projekt zur Verfügung
(Projektname, Freiheitsgrade pro Knoten, Knoten- bzw. Elementanzahl, etc.). Auch
das Beenden des Programms wird über diesen Menüpunkt gesteuert.
Ansicht
Kontrolliert die Darstellung einer Struktur im zwei- bzw. dreidimensionalen Raum.
Es können eine Reihe von Dialogboxen aktiviert werden, in welchen der Benutzer die
Parameter und die Form der Darstellung definieren kann. Angezeigt werden z.B. Ele-
mentanzahl, Elementnummern, Knotenanzahl, Knotennummern, Eigenschaften der
Knoten (abhängige Knoten), etc.
Fenster
Definiert die Einstellungen für die graphische Zeichenfläche. Die Zeichenfläche kann
aus einem oder mehreren Teilfenstern bestehen. Im oberen Fenster können z.B. die
plastischen Krümmungen in den einzelnen Elementen dargestellt werden, im unte-
ren Fenster die Verformungen an der Gesamtstruktur.
Modus
Aktiviert einen der folgenden Mode
Analyse - schaltet in den Modul zur nichtlinearen Berechnung über. Aus diesem
Modus kann dann die Struktur inkrementell analysiert werden. Der Algorithmus
dazu ist so aufgebaut, dass er jederzeit gestartet, gestoppt und dass zur
Ausgangslage zurückgekehrt werden kann. Über zusätzliche Buttons können
noch Verfestigungsparameter sowie das Abbruchkriterium spezifiziert werden.
3D - Ansicht erlaubt eine dreidimensionale Darstellung der Berechnung. Es kön-
nen zu jedem Lastschritt die Verformungen visuell mitverfolgt werden.
Masche - generiert automatisch zur jeweiligen Struktur eine finite Element Ma-
sche, bestehend aus Dreieck- und Viereckelementen.
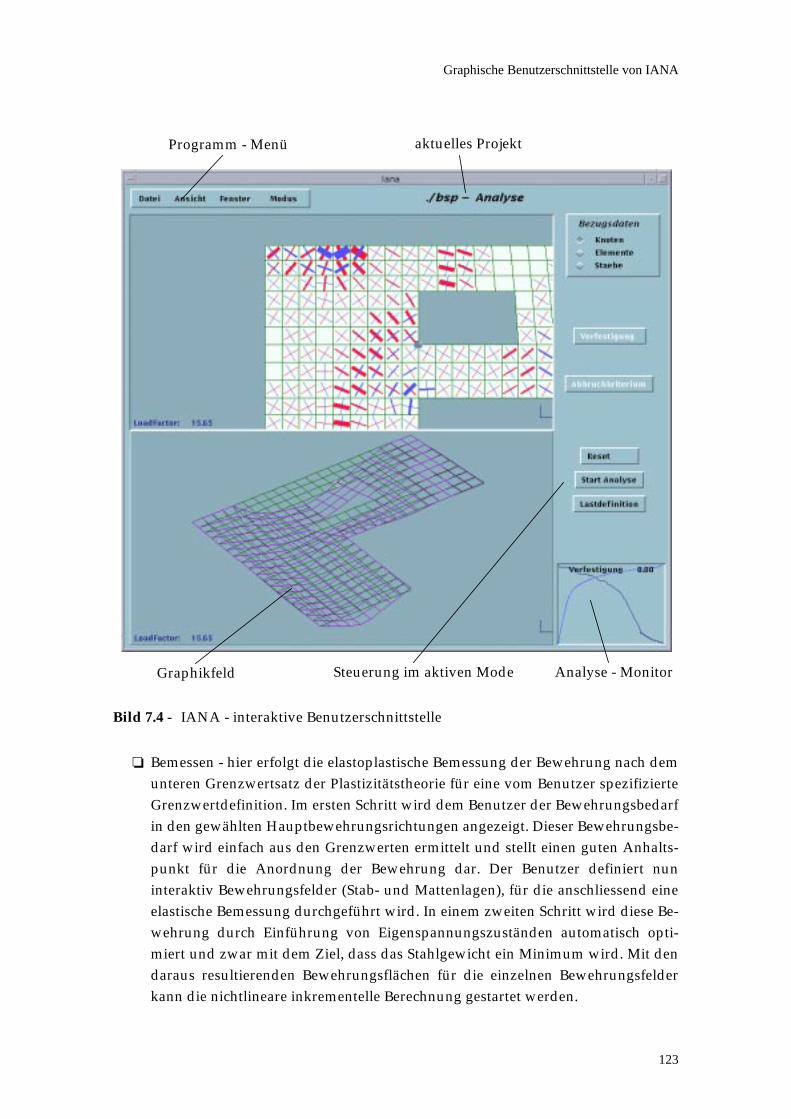
Graphische Benutzerschnittstelle von IANA
123
Bild 7.4 - IANA - interaktive Benutzerschnittstelle
Bemessen - hier erfolgt die elastoplastische Bemessung der Bewehrung nach dem
unteren Grenzwertsatz der Plastizitätstheorie für eine vom Benutzer spezifizierte
Grenzwertdefinition. Im ersten Schritt wird dem Benutzer der Bewehrungsbedarf
in den gewählten Hauptbewehrungsrichtungen angezeigt. Dieser Bewehrungsbe-
darf wird einfach aus den Grenzwerten ermittelt und stellt einen guten Anhalts-
punkt für die Anordnung der Bewehrung dar. Der Benutzer definiert nun
interaktiv Bewehrungsfelder (Stab- und Mattenlagen), für die anschliessend eine
elastische Bemessung durchgeführt wird. In einem zweiten Schritt wird diese Be-
wehrung durch Einführung von Eigenspannungszuständen automatisch opti-
miert und zwar mit dem Ziel, dass das Stahlgewicht ein Minimum wird. Mit den
daraus resultierenden Bewehrungsflächen für die einzelnen Bewehrungsfelder
kann die nichtlineare inkrementelle Berechnung gestartet werden.
Programm - Menü aktuelles Projekt
Graphikfeld Analyse - MonitorSteuerung im aktiven Mode
Implementierung
124
Lösen - kontrolliert das System hinsichtlich aller Strukturdaten, löst linear das fi-
nite Element System und zeigt die Verschiebungen und die Hauptspannungen in
graphischer und in numerischer Form an.
Belastung - erlaubt die Eingabe der einzelnen Lastfälle sowie deren Kombinatio-
nen. Bei der nichtlinearen Berechnung erfolgt die Definition der Lastgeschichte.
Geometrie - zeigt alle Lagerungsbedingungen und Eigenschaften des statischen
Systems an - Strukturtypen, Materialeigenschaften können kontrolliert und geän-
dert werden.
Über den Analyse - Monitor kann das Steifigkeitsverhalten der Struktur bei zunehmen-
den Lastniveau mitverfolgt werden. Dabei wird als globale Strukturkenngrösse der Stei-
figkeitsparameter dargestellt, der im elastischen Zustand 100% beträgt. Bei
zunehmender Plastifizierung nimmt er sukzessive ab, bis er bei Erreichen der Taglast
den Wert 0% annimmt. Als weitere Kennlinien können in diesem Monitor die Verschie-
bungen an frei wählbaren Punkten mitverfolgt werden. Die Ermittlung des Steifigkeits-
parameters wird im Anhang B gezeigt.
Angesichts der in letzten Jahren beobachteten Verminderung der plastischen Verform-
barkeit der Stähle besteht hier auch die Möglichkeit, die plastischen Rotationen über ein
vom Benutzer definiertes Duktilitätskriterium einzuschränken. Wird dieses Kriterium
verletzt, so wird dies dem Benutzer durch Verfärbung des entsprechenden Elementes
angezeigt. So kann direkt mitverfolgt werden, welche Elemente der Reihe nach das Duk-
tilitätskriterium verletzen.
125
8 Beispiele
8.1 Einleitung
Anhand von drei Beispielen soll gezeigt werden, wie das neu implementierte Verfahren
zur nichtlinearen Analyse verwendet werden kann. Das erste Beispiel betrifft eine qua-
dratische voll eingespannte Platte, von der man die theoretischen Lösungen kennt. In
diesem Zusammenhang soll zunächst die errechnete Traglast der theoretischen bei ma-
terialbedingter Nichtlinearität gegenübergestellt werden. Im weiteren soll unter Anwen-
dung der Theorie grosser Verformungen und unter alleiniger Berücksichtigung des
geometrisch nichtlinearen Verhaltens bei Verwendung von Schalenelementen ein Ver-
gleich zwischen den auftretenden Verschiebungen und den theoretisch bekannten Ver-
schiebungen in Plattenmitte aufgestellt werden. Das zweite Beispiel zeigt das
Zusammenspiel von Bemessungs- und Analysemodul. Dabei wird Schritt für Schritt er-
klärt, wie die Eingabe einer in der Praxis vorkommenden Platte erfolgen kann, und wie
Bewehrungsfelder definiert werden. Das dritte und letzte Beispiel stellt eine Kreisplatte
mit ausschliesslich vertikaler Belastung dar. Unter der Verwendung von Schalenelemen-
ten soll hier veranschaulicht werden, wie aus der anfänglich entkoppelten Tragwirkung
von Membran- und Biegewirkung eine Koppelung aus der Aktivierung der Fliessbedin-
gungen entsteht.
8.2 Quadratische Platte
In diesem Beispiel wird eine quadratische Platte mit den Abmessungen 4 x 4 m betrach-
tet, die an den Rändern voll eingespannt ist. Als Belastung wird eine gleichmässig über
die ganze Platte verteilte Flächenlast von q = 1 kN/m2 angenommen, die sukzessive ge-
steigert wird, bis die Traglast erreicht ist. Die Plattenbewehrung selbst besteht aus vier
Bewehrungsfeldern über die ganze Platte mit jeweils zwei zueinander orthogonal ste-
henden, gleichen Bewehrungsgehalten für die untere und obere Bewehrung. Aus den
hier angegebenen Strukturdaten wird unter Ausnützung der Symmetrieeigenschaften
nur der Viertelteil der Platte modelliert (Bild 8.1). Die sich aus der Analyse ergebende
Traglast wird dann der theoretisch bekannten Lösung gegenübergestellt. Anschliessend
wird unter Anwendung der korotierten Koordinaten gezeigt, wie der Membranspan-
nungszustand in der Platte bei grossen Verformungen aktiviert wird.

Beispiele
126
Bild 8.1 - Geometrie der Platte
Zur Definition des statischen Systems werden in einer Text - Datei zuerst der Umriss
bzw. seine vier Eckpunktkoordinaten sowie die dazugehörigen Materialeigenschaften
gespeichert. Als weiterer Eingabeparameter wird auch noch der Grad der Maschenfein-
heit benötigt. Gestützt auf diese Informationen generiert das Programm eine finite Ele-
mentmasche, die vom Benutzer noch an gewünschten Stellen verfeinert werden kann.
Bild 8.2 zeigt die generierte Elementmasche mit Verfeinerung, bestehend aus 166 Ele-
menten mit 209 Knoten.
Bild 8.2 - Masche mit Verfeinerung
2,0 m 2,0 m
2,0 m
2,0 m
q 1kN m2⁄=
0,2 m
Betongüte B30/20
Stahl S 500
Material:
Symmetrieachse
Sym
met
rieac
hse

Quadratische Platte
127
Im Anschluss daran werden die Lagerungsbedingungen festgelegt, wobei am Platten-
rand alle Freiheitsgrade für die Knoten, während in der Symmetrieachse nur die Rota-
tionen um die jeweilige Achse, bzw. im Falle grosser Verschiebungen auch die
Horizontalverschiebungen blockiert sind. Abgeschlossen wird die Eingabe mit der Bela-
stung und mit der Definition der Bewehrungsgehalte für die vier Bewehrungsfelder
(Bild 8.3).
Bild 8.3 - Anordnung der unteren und oberen Plattenbewehrung
8.2.1 Nichtlinearität im Materialverhalten
Für die Berechnung der Traglast wird der Mindestbewehrungsgehalt gemäss SIA 162
[26] von herangezogen. Zunächst wird das
Lastniveau und der Zeitpunkt für die Neubildung der tangentiellen Steifigkeitsmatrix
(‘Stiffness - Updating’) festgelegt (siehe auch Kapitel 2.4). Allenfalls können stahl-
spezifische Eingabegrössen wie Grenzduktilität und/oder Verfestigungsparameter de-
finiert werden.
Zur Bestimmung der Traglast wird der im Kapitel 2.4 beschriebene Newton - Raphson
Algorithmus verwendet (siehe auch Anhang A). Dabei kann der in Lastschritten arbei-
tende Lösungsprozess direkt am Bildschirm mitverfolgt und jederzeit gestoppt und fort-
gesetzt werden. Damit ein Vergleich zwischen der errechneten Traglast mit der
theoretisch bekannten möglich ist, wird in diesem Beispiel weder eine Grenzduktilität
noch ein Verfestigungsparameter definiert.
asx+
asy+
asx-
asy-
= = =
1
2
3
4
untere Plattenbewehrung obere Plattenbewehrung
Stablage mit Richtung
asx+
asy+
asx-
asy-
asx+
asy+
asx-
asy-
255mm2
m⁄= = = =
KT
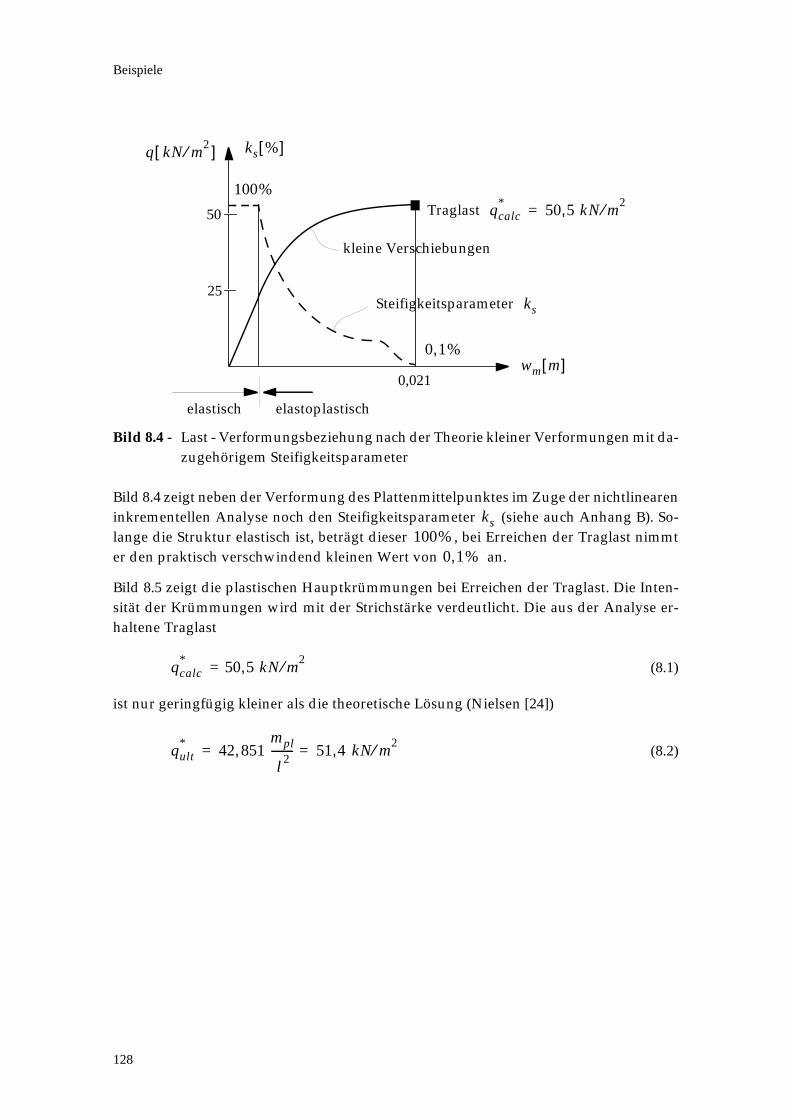
Beispiele
128
Bild 8.4 - Last - Verformungsbeziehung nach der Theorie kleiner Verformungen mit da-
zugehörigem Steifigkeitsparameter
Bild 8.4 zeigt neben der Verformung des Plattenmittelpunktes im Zuge der nichtlinearen
inkrementellen Analyse noch den Steifigkeitsparameter (siehe auch Anhang B). So-
lange die Struktur elastisch ist, beträgt dieser , bei Erreichen der Traglast nimmt
er den praktisch verschwindend kleinen Wert von an.
Bild 8.5 zeigt die plastischen Hauptkrümmungen bei Erreichen der Traglast. Die Inten-
sität der Krümmungen wird mit der Strichstärke verdeutlicht. Die aus der Analyse er-
haltene Traglast
(8.1)
ist nur geringfügig kleiner als die theoretische Lösung (Nielsen [24])
(8.2)
wm m[ ]
q kN m2⁄[ ]
50
25
elastisch
kleine Verschiebungen
Traglast
0,021
elastoplastisch
ks %[ ]
100%
0 1%,
Steifigkeitsparameter ks
qcalc*
50 5 kN m2⁄,=
ks100%
0 1%,
qcalc*
50 5 kN m2⁄,=
qult*
42 851mpl
l2
--------, 51 4 kN m2⁄,= =
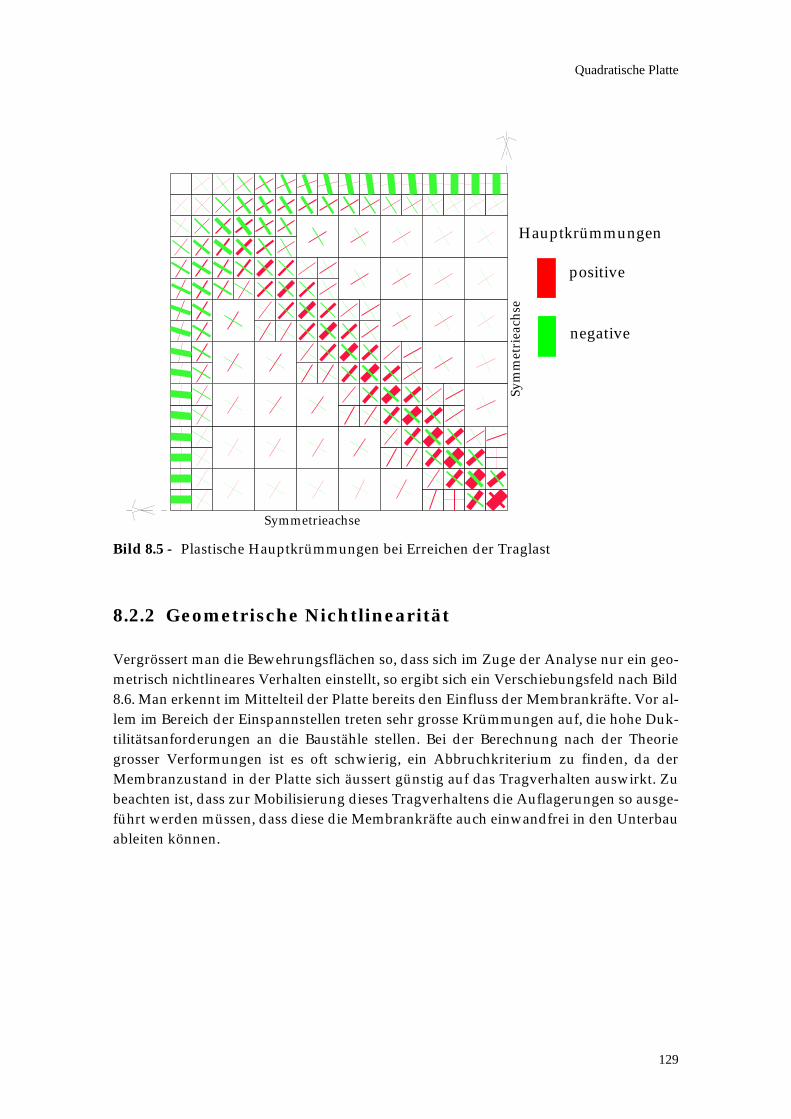
Quadratische Platte
129
Bild 8.5 - Plastische Hauptkrümmungen bei Erreichen der Traglast
8.2.2 Geometrische Nichtlinearität
Vergrössert man die Bewehrungsflächen so, dass sich im Zuge der Analyse nur ein geo-
metrisch nichtlineares Verhalten einstellt, so ergibt sich ein Verschiebungsfeld nach Bild
8.6. Man erkennt im Mittelteil der Platte bereits den Einfluss der Membrankräfte. Vor al-
lem im Bereich der Einspannstellen treten sehr grosse Krümmungen auf, die hohe Duk-
tilitätsanforderungen an die Baustähle stellen. Bei der Berechnung nach der Theorie
grosser Verformungen ist es oft schwierig, ein Abbruchkriterium zu finden, da der
Membranzustand in der Platte sich äussert günstig auf das Tragverhalten auswirkt. Zu
beachten ist, dass zur Mobilisierung dieses Tragverhaltens die Auflagerungen so ausge-
führt werden müssen, dass diese die Membrankräfte auch einwandfrei in den Unterbau
ableiten können.
Hauptkrümmungen
positive
negative
SymmetrieachseS
ym
metr
ieach
se
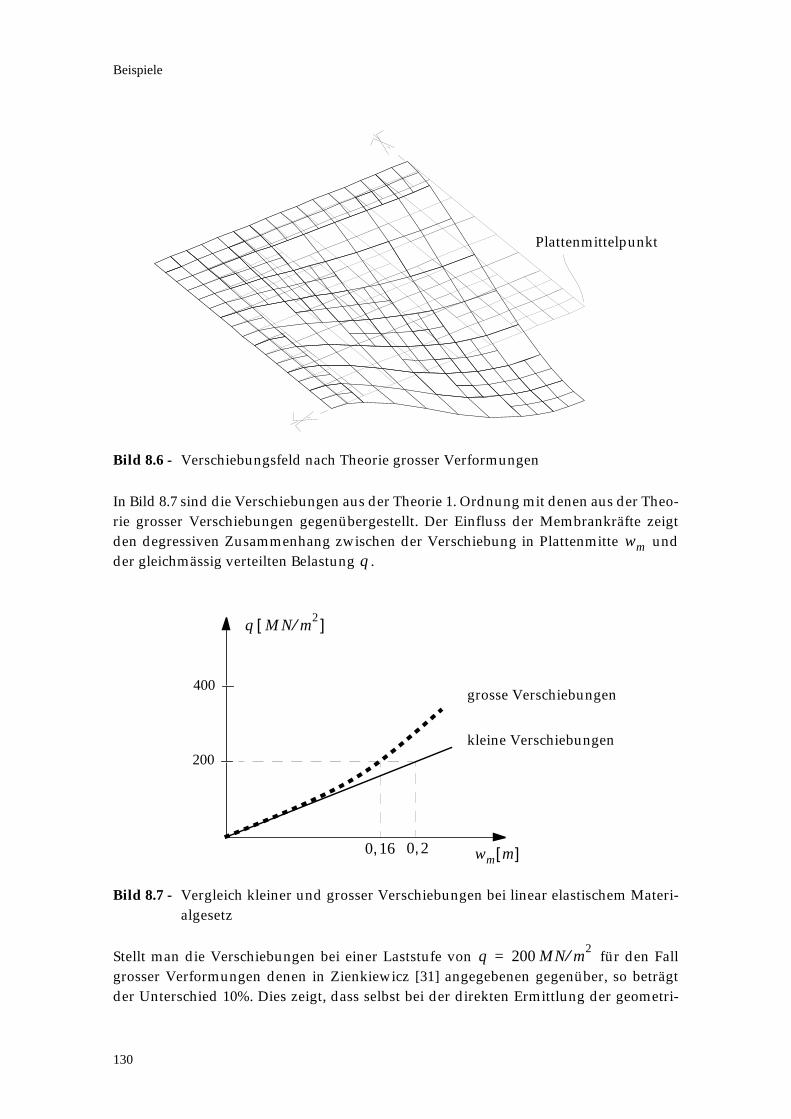
Beispiele
130
Bild 8.6 - Verschiebungsfeld nach Theorie grosser Verformungen
In Bild 8.7 sind die Verschiebungen aus der Theorie 1. Ordnung mit denen aus der Theo-
rie grosser Verschiebungen gegenübergestellt. Der Einfluss der Membrankräfte zeigt
den degressiven Zusammenhang zwischen der Verschiebung in Plattenmitte und
der gleichmässig verteilten Belastung .
Bild 8.7 - Vergleich kleiner und grosser Verschiebungen bei linear elastischem Materi-
algesetz
Stellt man die Verschiebungen bei einer Laststufe von für den Fall
grosser Verformungen denen in Zienkiewicz [31] angegebenen gegenüber, so beträgt
der Unterschied 10%. Dies zeigt, dass selbst bei der direkten Ermittlung der geometri-
Plattenmittelpunkt
wmq
wm m[ ]
q M N m2⁄[ ]
400
200kleine Verschiebungen
grosse Verschiebungen
0 16, 0 2,
q 200MN m2⁄=
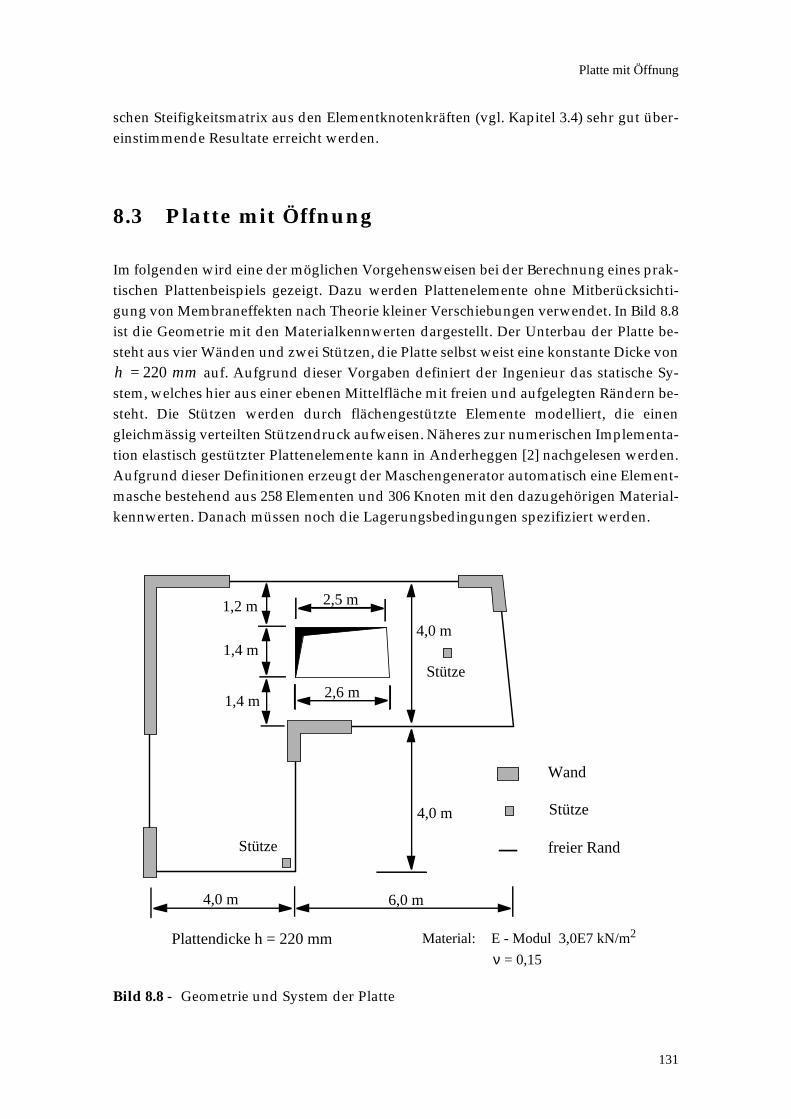
Platte mit Öffnung
131
schen Steifigkeitsmatrix aus den Elementknotenkräften (vgl. Kapitel 3.4) sehr gut über-
einstimmende Resultate erreicht werden.
8.3 Platte mit Öffnung
Im folgenden wird eine der möglichen Vorgehensweisen bei der Berechnung eines prak-
tischen Plattenbeispiels gezeigt. Dazu werden Plattenelemente ohne Mitberücksichti-
gung von Membraneffekten nach Theorie kleiner Verschiebungen verwendet. In Bild 8.8
ist die Geometrie mit den Materialkennwerten dargestellt. Der Unterbau der Platte be-
steht aus vier Wänden und zwei Stützen, die Platte selbst weist eine konstante Dicke von
auf. Aufgrund dieser Vorgaben definiert der Ingenieur das statische Sy-
stem, welches hier aus einer ebenen Mittelfläche mit freien und aufgelegten Rändern be-
steht. Die Stützen werden durch flächengestützte Elemente modelliert, die einen
gleichmässig verteilten Stützendruck aufweisen. Näheres zur numerischen Implementa-
tion elastisch gestützter Plattenelemente kann in Anderheggen [2] nachgelesen werden.
Aufgrund dieser Definitionen erzeugt der Maschengenerator automatisch eine Element-
masche bestehend aus 258 Elementen und 306 Knoten mit den dazugehörigen Material-
kennwerten. Danach müssen noch die Lagerungsbedingungen spezifiziert werden.
Bild 8.8 - Geometrie und System der Platte
h 220 mm=
4,0 m 6,0 m
2,6 m
2,5 m
1,4 m
1,4 m
1,2 m
4,0 m
4,0 m
Stütze
Stütze
Plattendicke h = 220 mm
Wand
Stütze
freier Rand
E - Modul 3,0E7 kN/m2
ν = 0,15
Material:
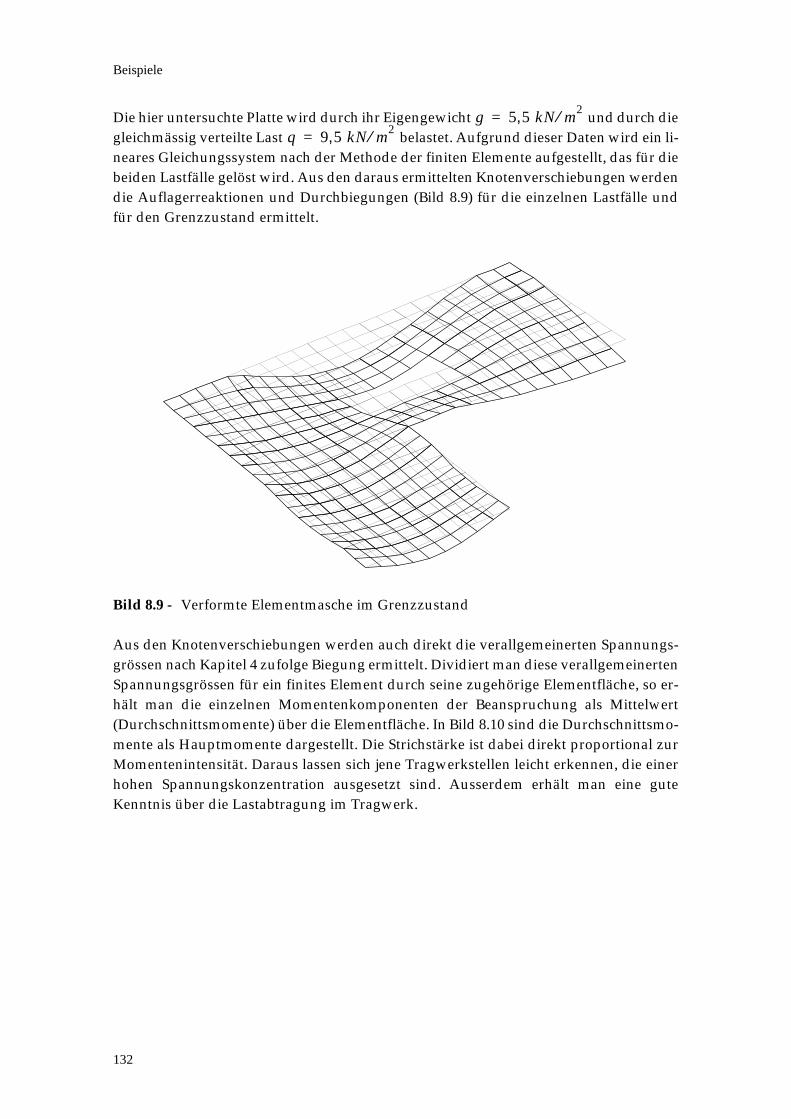
Beispiele
132
Die hier untersuchte Platte wird durch ihr Eigengewicht und durch die
gleichmässig verteilte Last belastet. Aufgrund dieser Daten wird ein li-
neares Gleichungssystem nach der Methode der finiten Elemente aufgestellt, das für die
beiden Lastfälle gelöst wird. Aus den daraus ermittelten Knotenverschiebungen werden
die Auflagerreaktionen und Durchbiegungen (Bild 8.9) für die einzelnen Lastfälle und
für den Grenzzustand ermittelt.
Bild 8.9 - Verformte Elementmasche im Grenzzustand
Aus den Knotenverschiebungen werden auch direkt die verallgemeinerten Spannungs-
grössen nach Kapitel 4 zufolge Biegung ermittelt. Dividiert man diese verallgemeinerten
Spannungsgrössen für ein finites Element durch seine zugehörige Elementfläche, so er-
hält man die einzelnen Momentenkomponenten der Beanspruchung als Mittelwert
(Durchschnittsmomente) über die Elementfläche. In Bild 8.10 sind die Durchschnittsmo-
mente als Hauptmomente dargestellt. Die Strichstärke ist dabei direkt proportional zur
Momentenintensität. Daraus lassen sich jene Tragwerkstellen leicht erkennen, die einer
hohen Spannungskonzentration ausgesetzt sind. Ausserdem erhält man eine gute
Kenntnis über die Lastabtragung im Tragwerk.
g 5 5 kN m2⁄,=
q 9 5 kN m2⁄,=
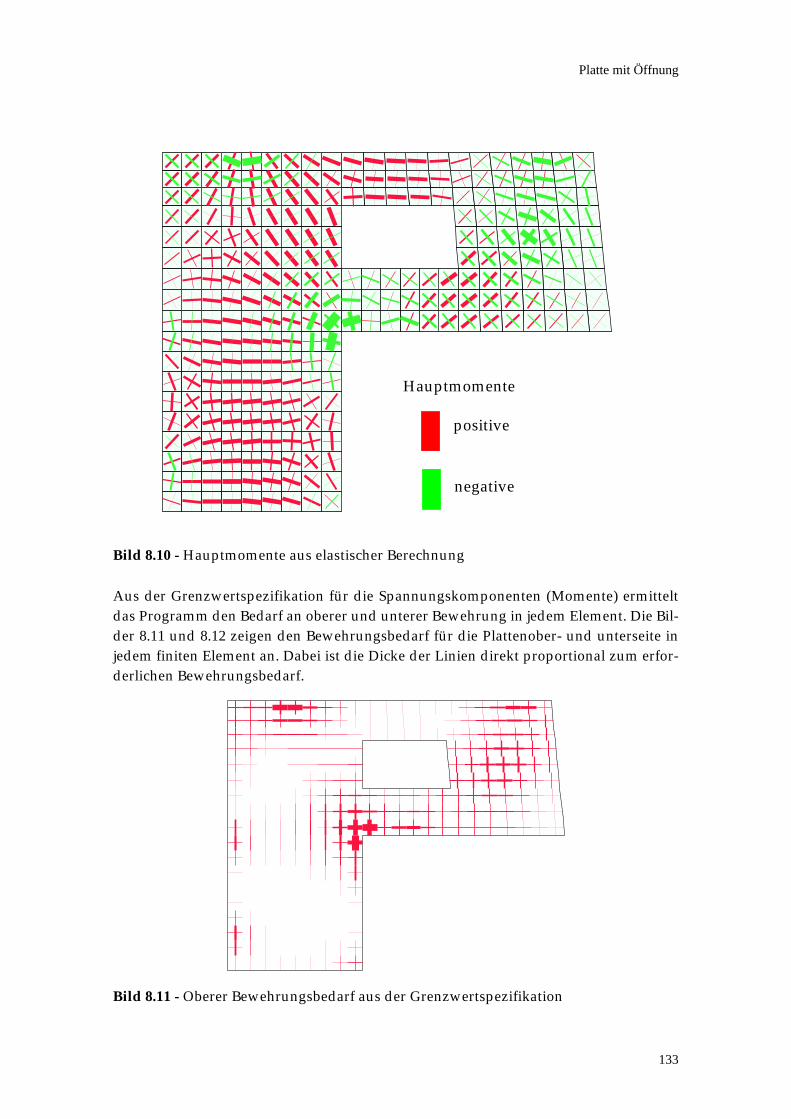
Platte mit Öffnung
133
Bild 8.10 - Hauptmomente aus elastischer Berechnung
Aus der Grenzwertspezifikation für die Spannungskomponenten (Momente) ermittelt
das Programm den Bedarf an oberer und unterer Bewehrung in jedem Element. Die Bil-
der 8.11 und 8.12 zeigen den Bewehrungsbedarf für die Plattenober- und unterseite in
jedem finiten Element an. Dabei ist die Dicke der Linien direkt proportional zum erfor-
derlichen Bewehrungsbedarf.
Bild 8.11 - Oberer Bewehrungsbedarf aus der Grenzwertspezifikation
Hauptmomente
positive
negative
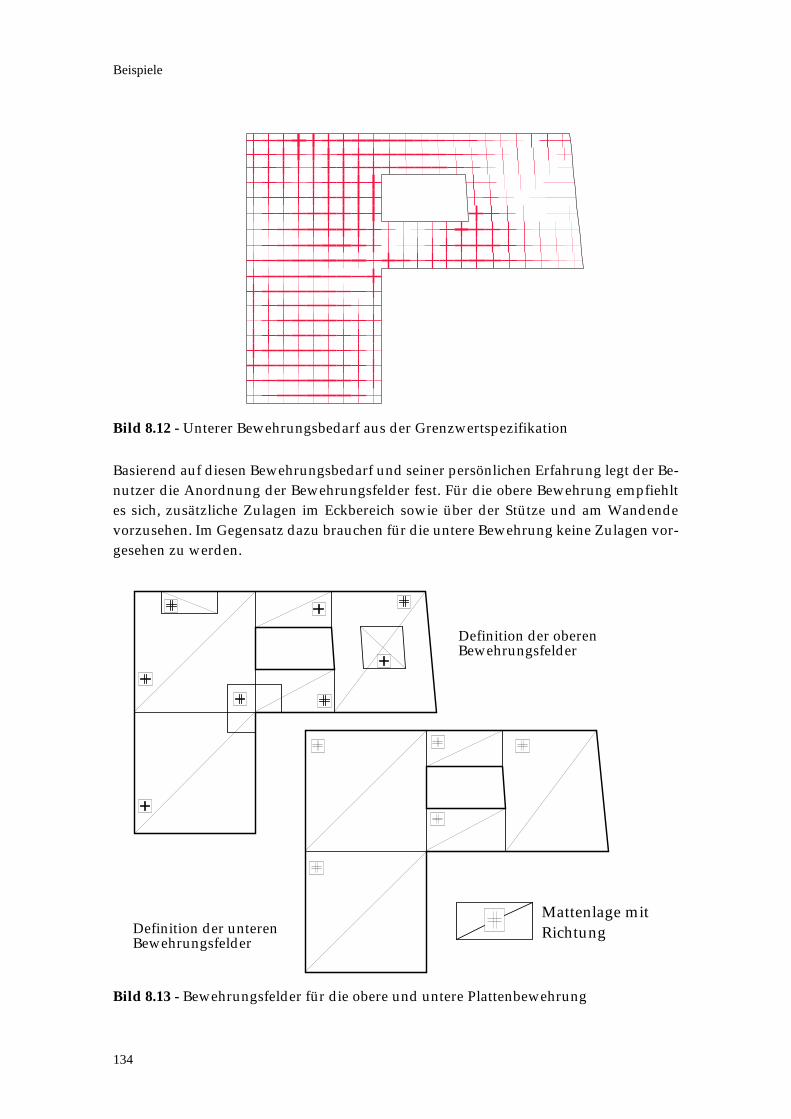
Beispiele
134
Bild 8.12 - Unterer Bewehrungsbedarf aus der Grenzwertspezifikation
Basierend auf diesen Bewehrungsbedarf und seiner persönlichen Erfahrung legt der Be-
nutzer die Anordnung der Bewehrungsfelder fest. Für die obere Bewehrung empfiehlt
es sich, zusätzliche Zulagen im Eckbereich sowie über der Stütze und am Wandende
vorzusehen. Im Gegensatz dazu brauchen für die untere Bewehrung keine Zulagen vor-
gesehen zu werden.
Bild 8.13 - Bewehrungsfelder für die obere und untere Plattenbewehrung
Definition der oberenBewehrungsfelder
Definition der unterenBewehrungsfelder
Mattenlage mit
Richtung
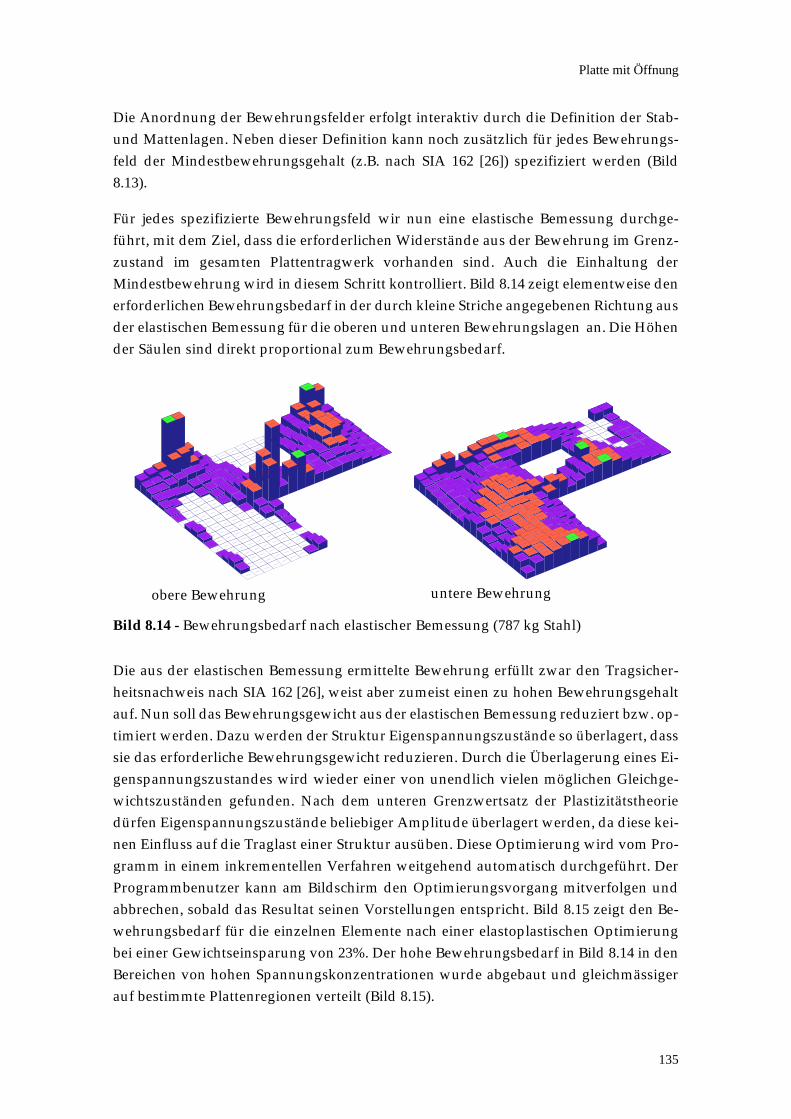
Platte mit Öffnung
135
Die Anordnung der Bewehrungsfelder erfolgt interaktiv durch die Definition der Stab-
und Mattenlagen. Neben dieser Definition kann noch zusätzlich für jedes Bewehrungs-
feld der Mindestbewehrungsgehalt (z.B. nach SIA 162 [26]) spezifiziert werden (Bild
8.13).
Für jedes spezifizierte Bewehrungsfeld wir nun eine elastische Bemessung durchge-
führt, mit dem Ziel, dass die erforderlichen Widerstände aus der Bewehrung im Grenz-
zustand im gesamten Plattentragwerk vorhanden sind. Auch die Einhaltung der
Mindestbewehrung wird in diesem Schritt kontrolliert. Bild 8.14 zeigt elementweise den
erforderlichen Bewehrungsbedarf in der durch kleine Striche angegebenen Richtung aus
der elastischen Bemessung für die oberen und unteren Bewehrungslagen an. Die Höhen
der Säulen sind direkt proportional zum Bewehrungsbedarf.
Bild 8.14 - Bewehrungsbedarf nach elastischer Bemessung (787 kg Stahl)
Die aus der elastischen Bemessung ermittelte Bewehrung erfüllt zwar den Tragsicher-
heitsnachweis nach SIA 162 [26], weist aber zumeist einen zu hohen Bewehrungsgehalt
auf. Nun soll das Bewehrungsgewicht aus der elastischen Bemessung reduziert bzw. op-
timiert werden. Dazu werden der Struktur Eigenspannungszustände so überlagert, dass
sie das erforderliche Bewehrungsgewicht reduzieren. Durch die Überlagerung eines Ei-
genspannungszustandes wird wieder einer von unendlich vielen möglichen Gleichge-
wichtszuständen gefunden. Nach dem unteren Grenzwertsatz der Plastizitätstheorie
dürfen Eigenspannungszustände beliebiger Amplitude überlagert werden, da diese kei-
nen Einfluss auf die Traglast einer Struktur ausüben. Diese Optimierung wird vom Pro-
gramm in einem inkrementellen Verfahren weitgehend automatisch durchgeführt. Der
Programmbenutzer kann am Bildschirm den Optimierungsvorgang mitverfolgen und
abbrechen, sobald das Resultat seinen Vorstellungen entspricht. Bild 8.15 zeigt den Be-
wehrungsbedarf für die einzelnen Elemente nach einer elastoplastischen Optimierung
bei einer Gewichtseinsparung von 23%. Der hohe Bewehrungsbedarf in Bild 8.14 in den
Bereichen von hohen Spannungskonzentrationen wurde abgebaut und gleichmässiger
auf bestimmte Plattenregionen verteilt (Bild 8.15).
obere Bewehrung untere Bewehrung
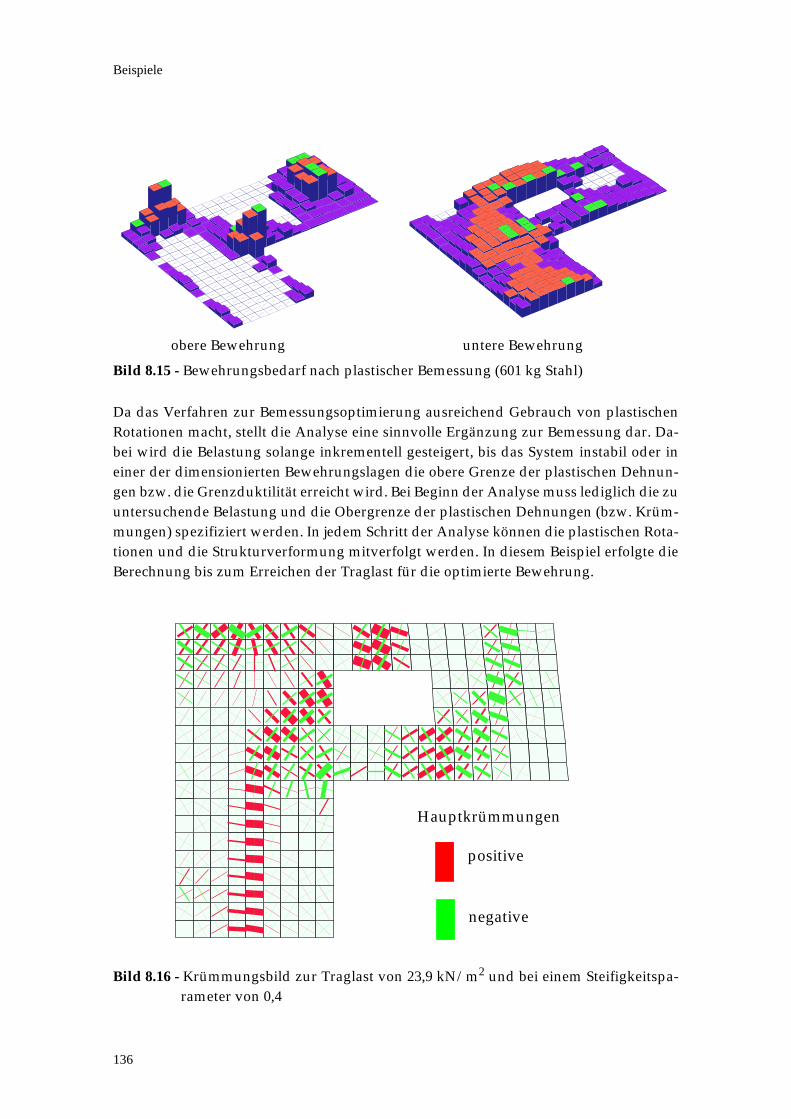
Beispiele
136
Bild 8.15 - Bewehrungsbedarf nach plastischer Bemessung (601 kg Stahl)
Da das Verfahren zur Bemessungsoptimierung ausreichend Gebrauch von plastischen
Rotationen macht, stellt die Analyse eine sinnvolle Ergänzung zur Bemessung dar. Da-
bei wird die Belastung solange inkrementell gesteigert, bis das System instabil oder in
einer der dimensionierten Bewehrungslagen die obere Grenze der plastischen Dehnun-
gen bzw. die Grenzduktilität erreicht wird. Bei Beginn der Analyse muss lediglich die zu
untersuchende Belastung und die Obergrenze der plastischen Dehnungen (bzw. Krüm-
mungen) spezifiziert werden. In jedem Schritt der Analyse können die plastischen Rota-
tionen und die Strukturverformung mitverfolgt werden. In diesem Beispiel erfolgte die
Berechnung bis zum Erreichen der Traglast für die optimierte Bewehrung.
Bild 8.16 - Krümmungsbild zur Traglast von 23,9 kN/m2 und bei einem Steifigkeitspa-
rameter von 0,4
obere Bewehrung untere Bewehrung
Hauptkrümmungen
positive
negative

Kreisplatte
137
Bild 8.16 zeigt die plastischen Hauptkrümmungen bzw. Rotationen bei Erreichen der
Traglast von 23,9 kN/m2, mit dem dazugehörigen Steifigkeitsparameter von 0,4. Dabei
entspricht die Strichstärke der Krümmungsintensität.
8.4 Kreisplatte
Die Kreisplatte im folgenden Beispiel (Bild 8.17) soll die Koppelung zwischen Membran-
und Biegezustand zeigen. Die betrachtete Platte, die rundum frei aufgelegt ist, wird als
Viertelkreis mittels Schalenelementen modelliert, damit die Symmetrieeigenschaften
voll ausgenützt werden können. Der Plattendurchmesser beträgt 6,0 m. Als Belastung
wird eine gleichmässig verteilte Last von q = 1 kN/m2 vorgesehen, die inkrementell ge-
steigert wird.
Bild 8.17 - Bauteilbeschreibung
Die obere und untere Bewehrung besteht aus biaxialen Matten mit Bewehrungsgehalten
von und . Bild 8.18 zeigt das statische System und
die Modellierung durch finite Elemente.
Entlang der Symmetrieachse in werden die Rotationen und die Verschiebungen ,
entlang der Symmetrieachse in die Rotationen und die Verschiebungen blok-
kiert. Befindet sich die Kreisplatte im elastischen Zustand, so treten an einem finiten Ele-
mentknoten mit seinen sechs Freiheitsgraden nur die drei Plattenfreiheitsgrade ,
und auf, während die Membranfreiheitsgrade , und bei den Free Formulation Ele-
menten verschwinden (Bild 8.18).
x u,
y v,
r 3= 0m,
Plattendicke h = 200 mm
Material:
E - Modul 3,0E7 kN/m2
ν = 0,17
as-
335 m m2
m⁄= as+
615m m2
m⁄=
x θx vy θy u
θx θyw u v
θz
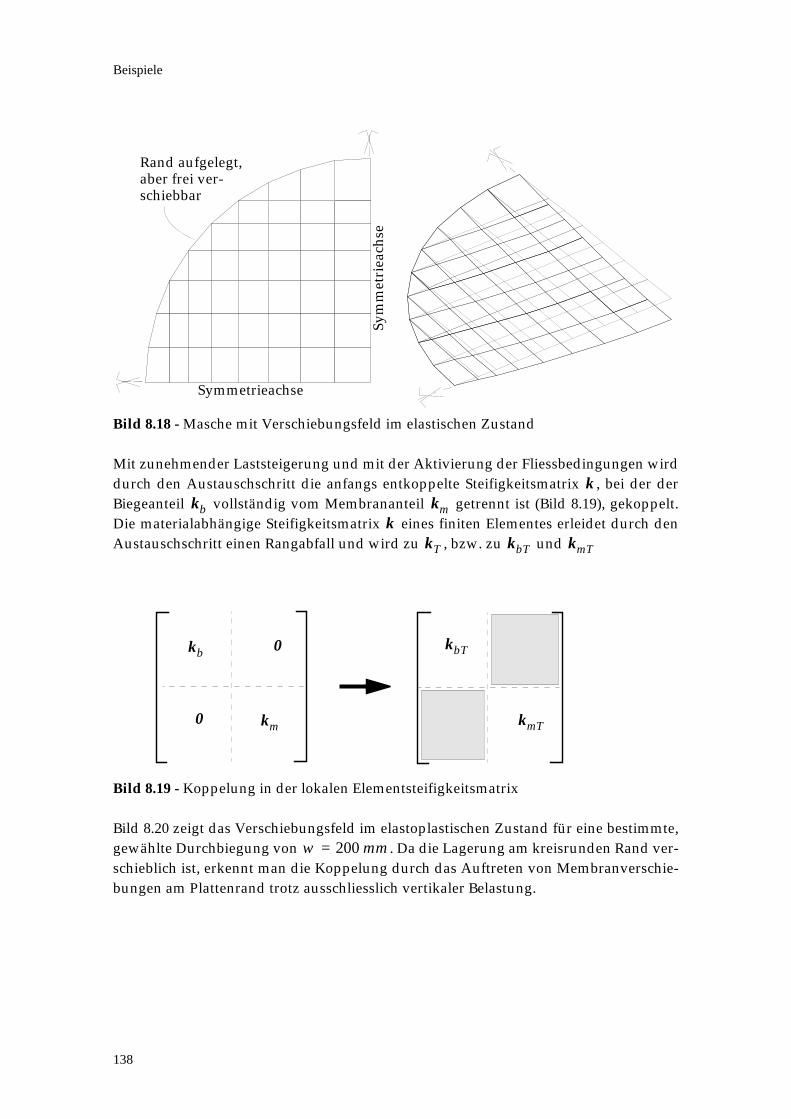
Beispiele
138
Bild 8.18 - Masche mit Verschiebungsfeld im elastischen Zustand
Mit zunehmender Laststeigerung und mit der Aktivierung der Fliessbedingungen wird
durch den Austauschschritt die anfangs entkoppelte Steifigkeitsmatrix , bei der der
Biegeanteil vollständig vom Membrananteil getrennt ist (Bild 8.19), gekoppelt.
Die materialabhängige Steifigkeitsmatrix eines finiten Elementes erleidet durch den
Austauschschritt einen Rangabfall und wird zu , bzw. zu und
Bild 8.19 - Koppelung in der lokalen Elementsteifigkeitsmatrix
Bild 8.20 zeigt das Verschiebungsfeld im elastoplastischen Zustand für eine bestimmte,
gewählte Durchbiegung von . Da die Lagerung am kreisrunden Rand ver-
schieblich ist, erkennt man die Koppelung durch das Auftreten von Membranverschie-
bungen am Plattenrand trotz ausschliesslich vertikaler Belastung.
SymmetrieachseS
ym
metr
ieach
se
Rand aufgelegt,aber frei ver-schiebbar
kkb km
kkT kbT kmT
kb
km
0
0
kbT
kmT
w 200mm=
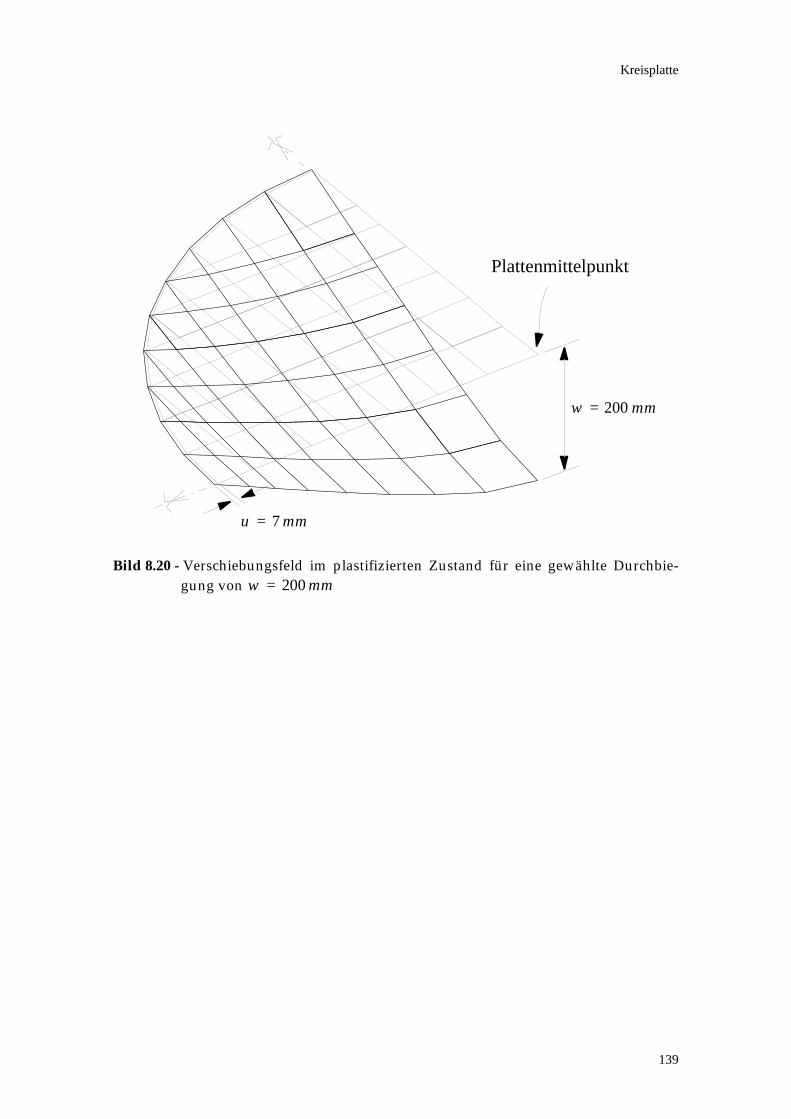
Kreisplatte
139
Bild 8.20 - Verschiebungsfeld im plastifizierten Zustand für eine gewählte Durchbie-
gung von
w 200mm=
Plattenmittelpunkt
u 7mm=
w 200mm=

140
141
9 Schlussbetrachtungen
9.1 Zum verwendeten Verfahren
In dieser Arbeit wird ein neues Konzept zur nichtlinearen Analyse von Stahlbetonplat-
ten und -schalen vorgestellt. Neu dabei ist, dass ein elastoplastisches Materialgesetz im
Knotenkraftraum definiert wird, und nicht wie bisher im Spannungs - Verzerrungs-
raum. Mit der Formulierung des Materialgesetzes im Knotenkraftraum, das auch als Ele-
mentgesetz bezeichnet wird, reduziert sich das bei finiten Element Programmen übliche
Dreistufensystem, bestehend aus System-, Element- und Materialstufe auf ein zweistu-
figes System, das nur mehr aus einer System- und Elementstufe besteht. Diese Reduktion
hat den Vorteil, dass auf Elementstufe direkt mit der Steifigkeitsmatrix gearbeitet wer-
den kann. Dadurch entfällt die Neubildung der Elementsteifigkeitsmatrix in jedem Zeit-
schritt. Diese wird nur mehr auf Elementstufe modifiziert und an die Systemstufe
weitergeleitet. Zur Beschreibung dieses Elementgesetzes müssen die dazu erforderli-
chen Fliessbedingungen linearisiert und für den Knotenkraftraum formuliert sein. Mit
Hilfe eines eigens dafür entwickelten Tableaualgorithmus wird der teil- bzw. vollplasti-
fizierte Zustand im Element beschrieben und die lokale Steifigkeitsmatrix entsprechend
abgeändert.
Da bei der Entwicklung der Schalenelemente eine Formulierung mit korotierten Koordi-
naten verwendet wird, kann das Elementgesetz auch in diesem lokalen, mit dem Ele-
ment mitgehenden Koordinatensystem formuliert werden. Dabei wird vorausgesetzt,
dass die Verzerrungen im Element klein bleiben; das finite Element selbst kann beliebig
grossen Starrkörperverschiebungen und -rotationen ausgesetzt sein. Erstmals wird die
Bildung der geometrischen Steifigkeitsmatrix für Biegung aus den Elementknotenkräf-
ten der Membranwirkung gezeigt. Damit entfällt die Neubildung der geometrischen
Steifigkeitsmatrix, und das Konzept der Knotenkräfte wird weiterhin aufrecht erhalten.
Der Hauptvorteil bei der Verwendung von Knotenkräften ist, dass diese mit den äusse-
ren Knotenlasten ein Gleichgewichtssystem bilden: Sie sind mit diesen exakt im Gleich-
gewicht, da das globale Gleichungssystem dafür gelöst wird. Der Umgang mit
Knotenkräften hat ferner den Vorteil, dass die sogenannte ‘Singularitätenproblematik’
weitgehend umgangen wird. Betrachtet man z.B. konzentrierte Einzellasten, Auflagerre-
aktionen oder auch einspringende Ecken bei Platten, so liefert die theoretisch exakte Lö-
sung für diese Stellen unendlich grosse Krümmungen bzw. Plattenmomente. Dies trifft
bei einer Modellierung nach der Methode der finiten Elemente im allgemeinen nicht zu,
da die finiten Elemente stets eine Näherungslösung liefern. Da aber diese Näherungslö-
sung einen konvergenten Charakter besitzt, streben die Plattenmomente bei zunehmen-
der Maschenverfeinerung mehr und mehr gegen unendlich. Somit stehen die Werte an

Schlussbetrachtungen
142
den Singularitätsstellen im direkten Zusammenhang mit der verwendeten Masche. Hier
werden jedoch nicht die Plattenmomente, sondern die Elementknotenkräfte als verallge-
meinerte Kraftgrössen, die das Gleichgewicht exakt erfüllen, verwendet.
Das hier vorgestellte Analyseverfahren kann sowohl zur Traglastbestimmung und zum
Nachweis der Duktilität von bestehenden als auch von neugebauten Stahlbetonplatten
und -schalen angewendet werden. Es stellt eine sinnvolle Ergänzung zum bestehenden
Bemessungsmodul dar. Die Kombination von Bemessungs- und Analysemodul ist bei
Neubauten sinnvoll. Die Bemessung hat nur die Optimierung des Stahlgewichts zum
Ziel, ohne auf die Frage der Duktilitätseigenschaften für die Bewehrungstähle einzuge-
hen. Deshalb ist es angebracht im Anschluss an die Bemessung eine Analyse durchzu-
führen, wobei zusätzlich die gewünschte Belastung und die Obergrenze der plastischen
Krümmungen einzugeben sind. Bricht das inkrementelle Verfahren bei Erreichen der
Traglast oder bei Überschreiten der Grenzduktilität ab, so erhält man die Verteilung des
plastischen Rotationsbedarfs und die Strukturverformung für die gegenwärtige Laststu-
fe zum Resultat. Dieselbe Berechnungsmethode kann auch zur Ermittlung der Tragsi-
cherheit bestehender Bauten verwendet werden, die Bewehrung wird dann direkt
eingegeben. Das Programm versucht die Belastung solange zu steigern, bis die Traglast
erreicht ist, oder die vorgegebene Stahlduktilität erschöpft ist. Resultat ist der Traglast-
faktor für die vorgegebene Belastung.
Mit dem Analysemodul wird versucht, ein möglichst praxisorientiertes Werkzeug mit
einfacher Handhabung zu schaffen, mit dem Ziel, dass die auf der Plastizitätstheorie ba-
sierenden Berechnungsverfahren in der Praxis den verdienten Anklang finden. Der Be-
nutzer wird bewusst nicht mehr mit komplexen Fragestellungen wie der Definition
eines Konvergenzkriteriums, Lastschrittwahl oder der Frage nach der Bildung der Stei-
figkeitsmatrix (‘Stiffness Updating’) konfrontiert. Diese Parameter werden im Laufe der
Iterationen vollautomatisch vom Programm bestimmt.
9.2 Weitere Anregungen
Folgende Ergänzungen wären im Rahmen weitergehender Forschungsprojekte noch
sinnvoll
Um die in der Praxis gestellten Forderungen auch optimal erfüllen zu können, müs-
sten alle Normbestimmungen direkt berücksichtigt werden. In diesem Projekt sind le-
diglich die generellen und allgemeingültigen Normbestimmungen berücksichtigt.
Bei der Programmentwicklung wurde besonderer Wert darauf gelegt, diese Bestim-
mungen im nachhinein einfach implementieren bzw. an die entsprechenden nationa-
len und internationalen Bestimmungen anpassen zu können (z.B. Beiwerte beim
Sicherheitskonzept). Angesichts der bereits implementierten Nachweiskonzepte
wäre der zusätzliche Entwicklungsaufwand nicht allzu gross.
Behandlung der lokalen Effekte, die sich im Stützbereich von Flachdecken ergeben,
wo hohe Schubbeanspruchungen auftreten (Durchstanzproblematik). Bei fehlender
Weitere Anregungen
143
Schubbewehrung kann dies zu schlagartigem, sprödem Versagen des Krafteinlei-
tungsbereichs führen. Wesentlich dabei ist, dass sich mit der Umlagerung der Mo-
mente auch die Querkraftverteilung ändert, womit die Zonen hoher
Schubbeanspruchung sich im Laufe der Belastungsgeschichte ändern.
Die Vorspannung kann nur als externer Lastfall angegeben werden. Dies ist an sich
sinnvoll, kann aber als Nachteil interpretiert werden, da die Vorspannkabel nach den
heute gültigen Normen nicht im gleichen Masse ausgenützt werden können, wie die
schlaffe Bewehrung.
Erweiterung auf verschiedene Elementmodelle. Bisher wurden für die Platten- und
Schalenelemente nur Elemente aus der ‘Free Formulation’ Familie verwendet. Eine
Erweiterung auf andere Elementtypen, wie Mindlin oder Morley Elemente wäre
auch von Interesse.
Entwicklung eines Stabelementes, damit die in der Praxis oft vorkommenden Balken-
strukturen zur Gänze berechnet werden können. Mit Hilfe eines solchen Elements
kann dann der Benutzer die Längs- bzw. Schubbewehrung vorgeben und die Analyse
im Anschluss daran durchführen. Selbst die Kombination von Stab- und Schalenkon-
struktionen wäre dann möglich.

144

145
Anhang
A Newton - Raphson
Die Lösung von Gleichung 2.23 verlangt ein iteratives Vorgehen, da die Knotenpunkt-
kräfte nichtlinear von den Knotenpunktverschiebungen abhängen. Ein häufig verwen-
detes Iterationsschema zur Lösung von nichtlinearen finiten Element - Gleichungen ist
der Newton - Raphson Algorithmus mit seinen Modifikationen wie Anfangssteifigkeits-
methode oder ‘Initial Stress Method’, modifizierter oder ‘Modified’ Newton - Raphson
und vollständiger oder ‘Full’ Newton - Raphson (siehe auch Kapitel 2.4). Vor Beginn je-
der nichtlinearen Analyse wird die Zeit , die hier die Rolle eines Lastparameters spielt,
und der globale Knotenverschiebungsvektor zu Null initialisiert (Bild A.1). Es gilt
, dabei stellen die die internen Knotenkräfte und den
Vektor der externen Knotenlasten dar. Die Hauptschleife über die Zeit- bzw. Lastschrit-
te, bei der jeweils um erhöht wird, kann dann beginnen. Wird ein neuer Zeitschritt
in Angriff genommen, so werden dabei die äusseren Lasten auf , bei gleich-
bleibenden Knotenverschiebungen erhöht. Dadurch entstehen gleichgewichtsverlet-
zende Knotenlasten, die man auch als Residuallasten bezeichnet. Diese errechnen sich
aus
(A.1)
Das Tragwerk wird nun mit diesen Residuallasten belastet, wie wenn diese äussere
Lasten wären. Die daraus verursachten Knotenverschiebungsinkremente werden
aus der Lösung des globalen linearen Gleichungssystems bestimmt
bzw. (A.2)
Die Residualkräfte
(A.3)
werden für die mit veränderten Knotenverschiebungen erneut berechnet.
Verhält sich das Tragwerk linear, so verschwinden die Residualkräfte. Bei nichtlinearem
Verhalten muss iteriert werden, bis die Residualkräfte verschwinden. Für die Iteration
wird die neue, den Knotenverschiebungen angepasste Tangentensteifigkeits-
matrix bestimmt. Mit dieser werden wiederum verbesserte Verschiebungsinkre-
mente
(A.4)
tA
P A( ) F t( ) 0= = P A( ) F t( )
t ∆tF t ∆t+( )
A
R F t ∆t+( ) P A( )–=
R∆A
KT∆A R F t ∆t+( ) P A( )–= = ∆A KT1– R=
R F t ∆t+( ) P A ∆A+( )–=
∆A A ∆A+
A ∆A+KT
∆A ∆A KT1– R ∆A KT
1– F t ∆t+( ) P A ∆A+( )–( )+=+=
Anhang
146
durch Belastung des Tragwerkes mit den Residualkräften , bzw. durch Lösung des
entsprechenden globalen Gleichungssystems berechnet. Diese Gleichgewichtsiteratio-
nen werden über die Variable ‘iter’ kontrolliert. Wird die Anzahl der Iterationen grösser
als eine im Programm festgelegte Obergrenze, so wird der Zeitschritt reduziert. Wird
zu klein, so ist vermutlich die Traglast erreicht (Stopstelle A). Solche Gleichgewichts-
iterationen werden solange wiederholt, bis die Residuallasten klein genug sind. Trifft
dies zu, dann gilt das Knotengleichgewicht als erreicht. Es werden dann die totalen Kno-
tenverschiebungen um und der Zeitschritt auf erhöht. Dieser Zyklus
kann bis zum Erreichen der Traglast oder bis wiederholt werden. stellt
einen vordefinierten Zeitpunkt dar (Stopstelle B). Nach der Bildung der Tangentenstei-
figkeitsmatrix aus den einzelnen Elementbeiträgen , wird immer kontrolliert, ob
regulär und positiv definit ist, was einem stabilen statischen System entspricht. Wird
singulär oder nicht positiv definit, dann ist die Traglast im letzten Zeitschritt er-
reicht, d.h. die Struktur ist nicht mehr stabil.
Programmiertechnisch lässt sich eine nichtlineare Analyse nach der klassischen Metho-
de von Newton - Raphson in folgende Schwerpunkte aufgliedern
Bestimmung der Knotenkräfte jedes Elementes für die gegebenen Kno-
tenverschiebungen und . Nichtlineare Effekte werden hier mitberücksichtigt.
Assemblierung des globalen Knotenkraftvektors aus den Elementkno-
tenkräften und Bestimmung der Residualkräfte aus
.
Bestimmung der lokalen Tangentensteifigkeitsmatrix für jedes Element für die
gegebenen Knotenverschiebungen und deren Inkremente , sowie Assemblie-
rung dieser zur globalen Tangentensteifigkeitsmatrix .
Bestimmung der Knotenverschiebungen aus den globalen Knotengleichge-
wichtsgleichungen aus der Koeffizientenmatrix und dem Residuumlastvektor
als Belastungsvektor .
Kontrolle, ob die Residuallasten klein genug sind, d.h. ob bei der letzten Iteration
Gleichgewicht erreicht werden konnte.
Der Zeitschritt ist ein wichtiger Eingabeparameter für den Newton - Raphson Algo-
rithmus. Seine Grösse wird so gewählt, dass zunächst bis zur Elastizitätsgrenze gesprun-
gen wird und anschliessend wird mit konstanter Schrittweite fortgefahren. Zur
Beurteilung, wie weit man von der Traglast entfernt ist, wird in IANA der Steifigkeits-
parameter eingeführt (siehe Anhang B). Dieser wird am Ende jedes Zeitschrittes berech-
net und sowohl numerisch, als auch graphisch ausgegeben.
R
t∆∆t
R
A ∆A+ t ∆t+t tEnde> tEnde
KT kTKTKT
p a ∆a+( )a ∆a
P A ∆A+( )p a ∆a+( )
R F t ∆t+( ) P A ∆A+( )–=
kTa ∆a
KT
∆AKT
R
R
∆t
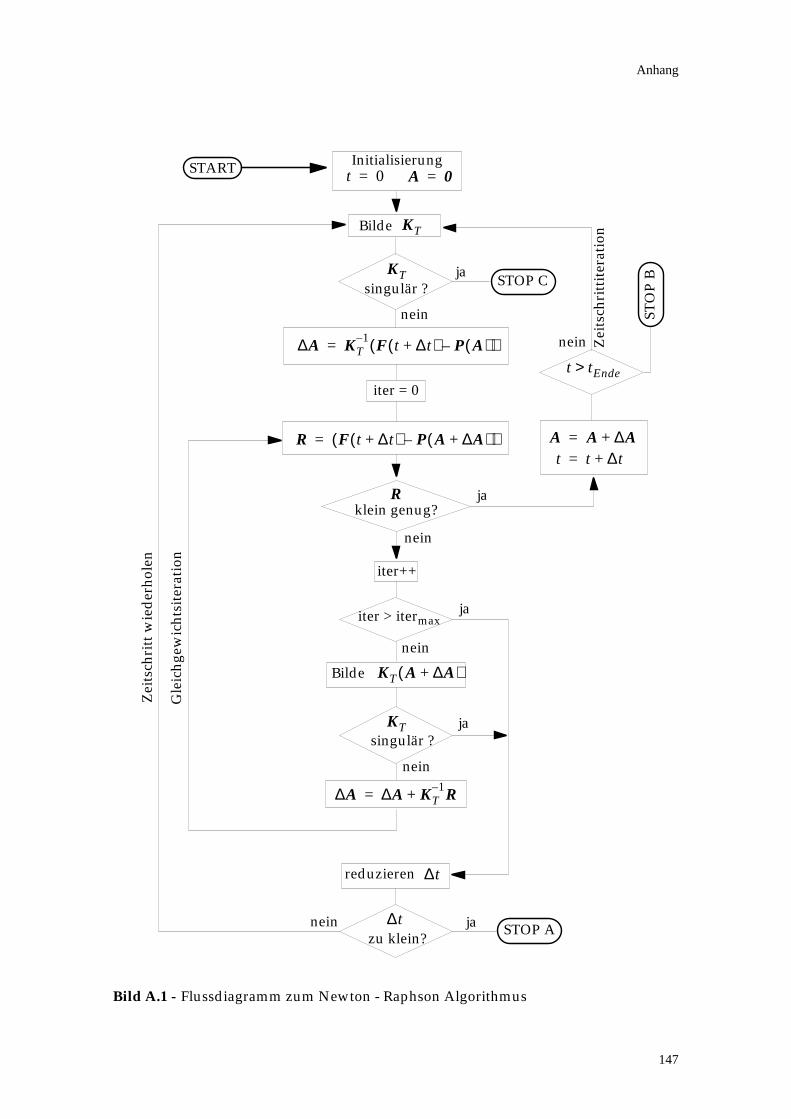
Anhang
147
Bild A.1 - Flussdiagramm zum Newton - Raphson Algorithmus
Initialisierungt 0= A 0=
∆A KT1– F t ∆t+( ) P A( )–( )=
R F t ∆t+( ) P A ∆A+( )–( )=
Rklein genug?
∆A ∆A KT1– R+=
A A A∆+=t t ∆t+=
STARTG
leic
hg
ew
ich
tsit
era
tio
n
Zeit
sch
ritt
itera
tio
nBilde KT
KTsingulär ?
iter = 0
iter++
iter > itermax
Bilde KT A ∆A+( )
singulär ?
KT
reduzieren ∆t
∆tzu klein?
t tEnde>
STOP Cja
nein
nein
ST
OP
B
ja
nein
ja
nein
ja
nein
neinSTOP A
Zeit
sch
ritt
wie
derh
ole
n
ja
148
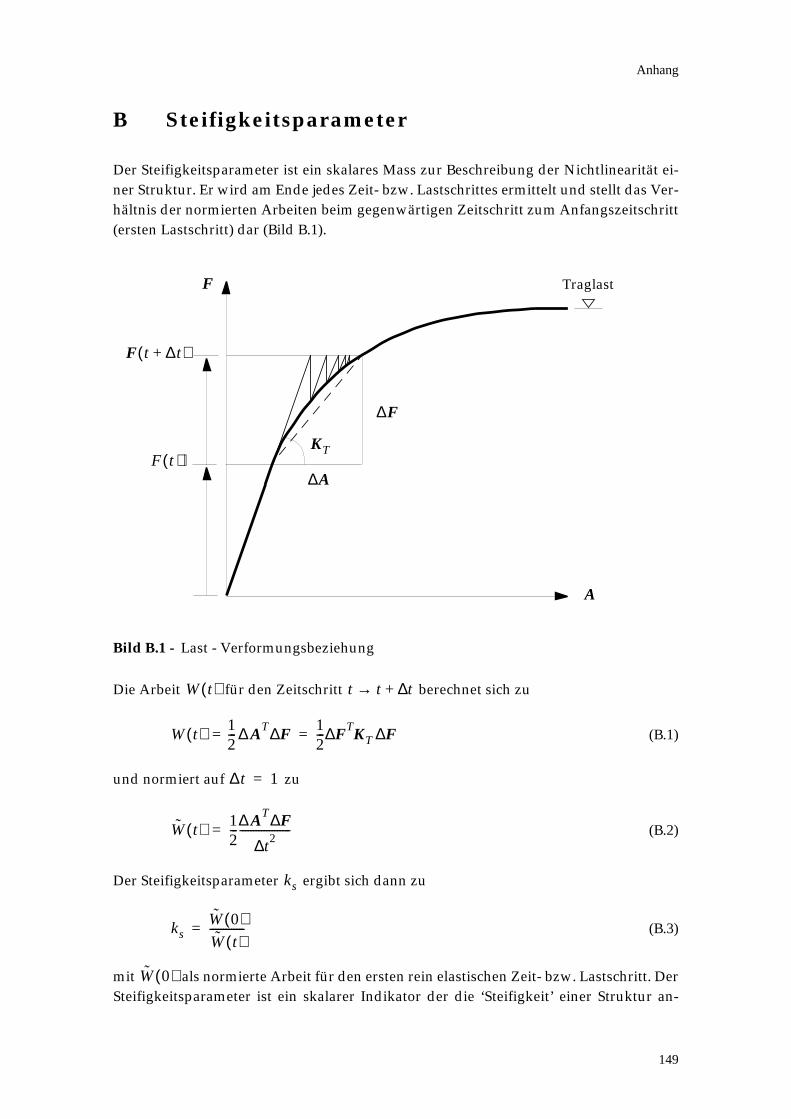
Anhang
149
B Steifigkeitsparameter
Der Steifigkeitsparameter ist ein skalares Mass zur Beschreibung der Nichtlinearität ei-
ner Struktur. Er wird am Ende jedes Zeit- bzw. Lastschrittes ermittelt und stellt das Ver-
hältnis der normierten Arbeiten beim gegenwärtigen Zeitschritt zum Anfangszeitschritt
(ersten Lastschritt) dar (Bild B.1).
Bild B.1 - Last - Verformungsbeziehung
Die Arbeit für den Zeitschritt berechnet sich zu
(B.1)
und normiert auf zu
(B.2)
Der Steifigkeitsparameter ergibt sich dann zu
(B.3)
mit als normierte Arbeit für den ersten rein elastischen Zeit- bzw. Lastschritt. Der
Steifigkeitsparameter ist ein skalarer Indikator der die ‘Steifigkeit’ einer Struktur an-
A
F
∆F
∆A
F t ∆t+( )
F t )( )
Traglast
KT
W t( ) t t t∆+→
W t( ) 12--- ∆AT F∆ 1
2--- FTKT F∆∆= =
∆t 1=
W t( ) 12---∆AT F∆
t2∆
-------------------=
ks
ksW 0( )W t( )-------------=
W 0( )

Anhang
150
zeigt. Zu Beginn des Lösungsprozesses (Zeitfaktor ) ist . Mit fort-
schreitender Belastung kommt es zu einer Änderung des Steifigkeitsparameters. Wird
die Struktur weicher bzw. steifer, dann ist bzw. . Beim Erreichen
der Traglast wird (Bild B.1).
t 0= ks 100%=
ks 100%< ks 100%>ks 0 %=
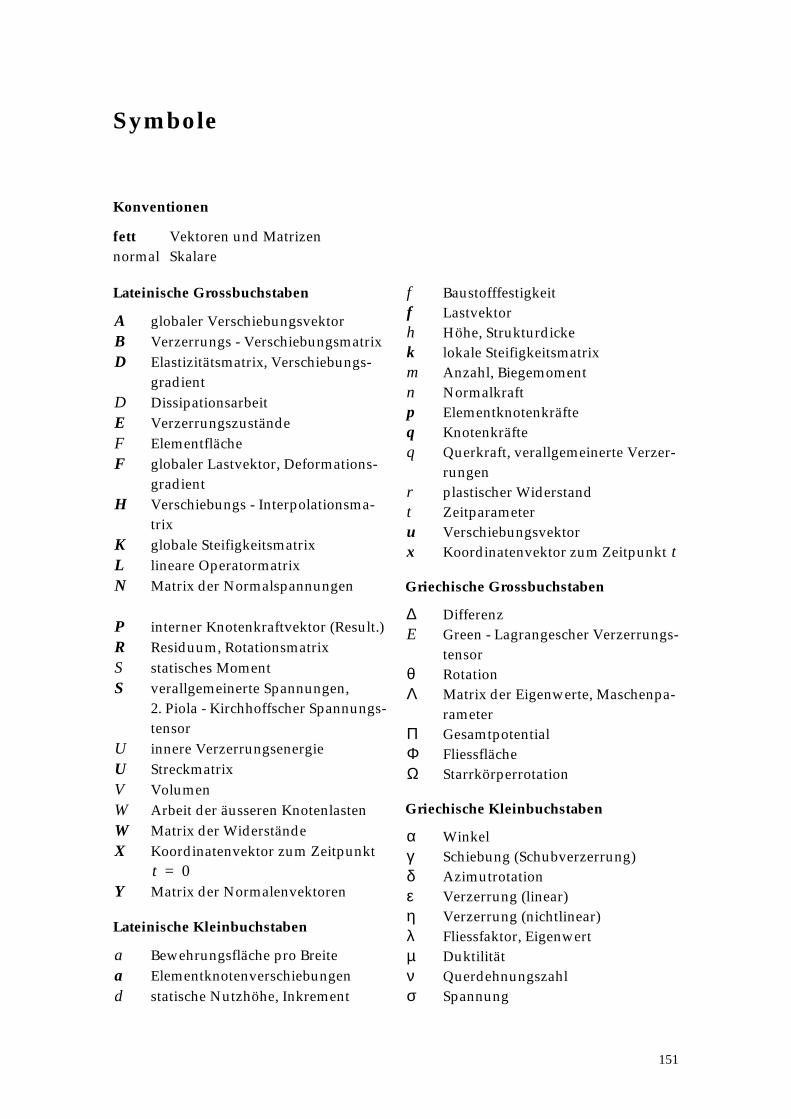
151
Symbole
Konventionen
fett Vektoren und Matrizen
normal Skalare
Lateinische Grossbuchstaben
globaler Verschiebungsvektor
Verzerrungs - Verschiebungsmatrix
Elastizitätsmatrix, Verschiebungs-
gradient
Dissipationsarbeit
Verzerrungszustände
Elementfläche
globaler Lastvektor, Deformations-
gradient
Verschiebungs - Interpolationsma-
trix
globale Steifigkeitsmatrix
lineare Operatormatrix
Matrix der Normalspannungen
interner Knotenkraftvektor (Result.)
Residuum, Rotationsmatrix
statisches Moment
verallgemeinerte Spannungen,
2. Piola - Kirchhoffscher Spannungs-
tensor
innere Verzerrungsenergie
Streckmatrix
Volumen
Arbeit der äusseren Knotenlasten
Matrix der Widerstände
Koordinatenvektor zum Zeitpunkt
Matrix der Normalenvektoren
Lateinische Kleinbuchstaben
Bewehrungsfläche pro Breite
Elementknotenverschiebungen
statische Nutzhöhe, Inkrement
Baustofffestigkeit
Lastvektor
Höhe, Strukturdicke
lokale Steifigkeitsmatrix
Anzahl, Biegemoment
Normalkraft
Elementknotenkräfte
Knotenkräfte
Querkraft, verallgemeinerte Verzer-
rungen
plastischer Widerstand
Zeitparameter
Verschiebungsvektor
Koordinatenvektor zum Zeitpunkt
Griechische Grossbuchstaben
Differenz
Green - Lagrangescher Verzerrungs-
tensor
Rotation
Matrix der Eigenwerte, Maschenpa-
rameter
Gesamtpotential
Fliessfläche
Starrkörperrotation
Griechische Kleinbuchstaben
Winkel
Schiebung (Schubverzerrung)
Azimutrotation
Verzerrung (linear)
Verzerrung (nichtlinear)
Fliessfaktor, Eigenwert
Duktilität
Querdehnungszahl
Spannung
ABD
DEFF
H
KLN
PRSS
UUVWWX
t 0=Y
aad
ffhkmnpqq
rtux t
∆E
θΛ
ΠΦΩ
αγδεηλµνσ
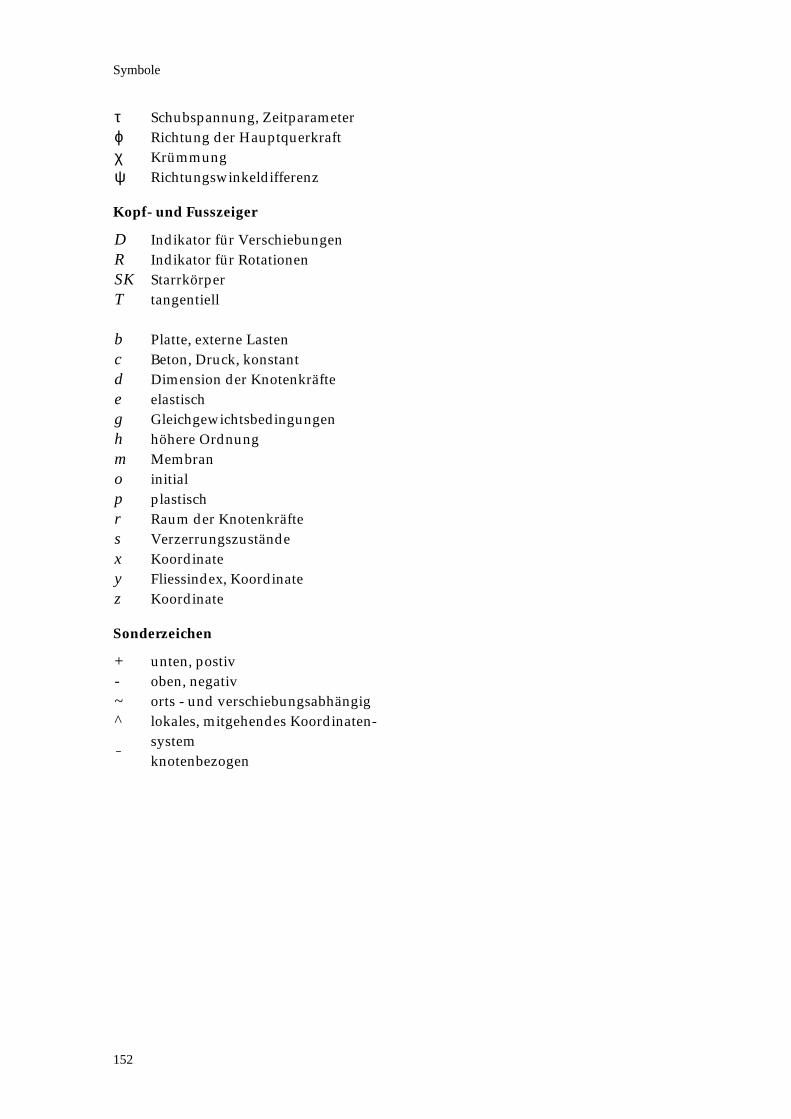
Symbole
152
Schubspannung, Zeitparameter
Richtung der Hauptquerkraft
Krümmung
Richtungswinkeldifferenz
Kopf- und Fusszeiger
Indikator für Verschiebungen
Indikator für Rotationen
Starrkörper
tangentiell
Platte, externe Lasten
Beton, Druck, konstant
Dimension der Knotenkräfte
elastisch
Gleichgewichtsbedingungen
höhere Ordnung
Membran
initial
plastisch
Raum der Knotenkräfte
Verzerrungszustände
Koordinate
Fliessindex, Koordinate
Koordinate
Sonderzeichen
unten, postiv
oben, negativ
orts - und verschiebungsabhängig
lokales, mitgehendes Koordinaten-
system
knotenbezogen
τϕχψ
DRSKT
bcdeghmoprsxyz
+-~^

153
Literaturverzeichnis
[1] Anderheggen E. : “Nichtlineare Finite Element Methoden”, Autographie, Institut
für Informatik, ETH Zürich, 1986
[2] Anderheggen E. : “Lineare Finite - Element - Methoden : Eine Einführung für In-
genieure”, Autographie, Institut für Baustatik und Konstruktion, ETH Zürich,
1993
[3] Anderheggen E., Glanzer G., Steffen P. : “Elasto - plasticity with polyhedral yield
surfaces in the element nodal force space”, Advances in finite element procedures
and techniques, Civil - Comp Press, Edinburgh, 1998
[4] Anderheggen E., Glanzer G., Steffen P. : “Plastische Berechnung von Stahlbeton-
platten”, Schweizer Ingenieur und Architekt, 4, 1999
[5] Anderheggen E., Glanzer G., Steffen P. : “Berechnung von Stahlbetonplatten : Ein
neues computerbasiertes Verfahren”, Fachtagung für Bauingenieure, Institut für
Baustatik und Konstruktion, 1999
[6] Bathe, K. J. : “Finite Element Procedures”, Prentice Hall International, 1996
[7] Bergan P. G., Felippa C. A. : “A Triangular Membrane Element with Rotational De-
grees of Freedom”, Computer Methods in Applied Mechanics and Engineering 50,
1985
[8] Conway M. : “The Suit Version 2.3 Reference Manual”, Simple User Interface Tool-
kit, University of Virginia, 1992
[9] Crisfield, M. A. : “Non-linear Finite Element Analysis of Solids and Structures”,
Volume 1, John Wiley & Sons, 1997
[10] Crisfield, M. A. : “Non - linear Finite Element Analysis of Solids and Structures”,
Volume 2, John Wiley & Sons, 1997
[11] Cubus : “Handbuch zu Cedrus - 3 plus”, Cubus AG, Zürich, 1996
[12] Despot Z. : “Methode der finiten Elemente und Plastizitätstheorie zur Bemessung
von Stahlbetonscheiben”, Dissertation Nr. 11327, ETH Zürich, Bericht Nr. 215, In-
stitut für Baustatik und Konstruktion, 1995
[13] Elmer H. : “Beitrag zur Entwicklung einfacher, nichtlinearer Platten- und Schalen-
elementmodelle”, Dissertation Nr. 8175, ETH Zürich, 1987
[14] Glanzer G., Steffen P. : “Zum Konvergenzverhalten von finiten Bemessungsele-
menten”, Festschrift Prof. Dr. E. Anderheggen zum 60. Geburtstag, Publikation SP
- 007, Institut für Baustatik und Konstruktion, 1999
[15] Graber C. : “Nichtlineare Analyse von Schalen mit linearisierten elastoplastischen
Schnittkraft - Verformungs - Beziehungen”, Dissertation Nr. 9165, ETH Zürich, Be-
richt Nr. 5, Professur für Informatik, Zürich Verlag der Fachvereine, 1990
[16] Irons B. M. : “Experience with the patch test for convergence of finite elements”,
Math. Found. of the Finite Element Meth. with Appl. to Partial Diff. Equations,
1972
Literaturverzeichnis
154
[17] Kernighan B., Ritchie D. : “Programmieren in C”, Zweite Ausgabe, Carl Hanser
Verlag, 1990
[18] Koiter W. T. : “Stress - strain relations, uniqueness and variational theorems for ela-
stic - plastic materials with a singular yield surface”, Quaterly of Applied Mathe-
matics 11, 1953
[19] Lippman S. : “C++ Primer”, Second Edition, Addison Wesley, 1991
[20] Marti P. : “Tragverhalten von Stahlbeton”, Fortbildungskurs für Bauingenieure,
Publikation SP - 008, Institut für Baustatik und Konstruktion, 1999
[21] Marti P. : “Design of Concrete Slabs for Transverse Shear”, ACI Structural Journal,
V. 87, No. 2, 1990
[22] Mises R. v. : “Mechanik der plastischen Formänderung von Kristallen”, Zeitschrift
für die angewandte Mathematik und Mechanik 8, 1928
[23] Müller P. : “Plastische Berechnung von Stahlbetonscheiben und -balken”, Bericht
Nr. 83, Institut für Baustatik und Konstruktion, 1978
[24] Nielsen M. P. : “Limit Analysis and Concrete Plasticity”, Prentice Hall, 1984
[25] Prager W. : “An Introduction to Plasticity”, Addison - Wesley, 1959
[26] SIA 162 : “Betonbauten”, Schweizerischer Ingenieur - und Architekten - Verein, SN
562 162, 1993
[27] Steffen P. : “Elastoplastische Dimensionierung von Stahlbetonplatten mittels Fini-
ter Bemessungselemente und Linearer Optimierung”, Dissertation Nr. 11611, ETH
Zürich, Bericht Nr. 220, Institut für Baustatik und Konstruktion, 1996
[28] Stroustrup B. : “ The C++ Programming Language”, Second Edition, Addison
Wesley, 1991
[29] Tabatabai S. M. R. : “Finite Element-based Elasto-Plastic Optimum Reinforcement
Dimensioning of Spatial Concrete Panel Structures”, Dissertation Nr. 11863, ETH
Zürich, Bericht Nr. 225, Institut für Baustatik und Konstruktion, 1996
[30] Zienkiewicz O. C., Taylor R. L. : “The Finite Element Method”, Fourth Edition, Vo-
lume 1, Mc Graw - Hill, 1998
[31] Zienkiewicz O. C., Taylor R. L. : “The Finite Element Method”, Fourth Edition, Vo-
lume 2, Mc Graw - Hill, 1998





























