-
7/28/2019 Review of Sdof Concepts
1/7
CEE490b
Page 1 of 7
REVIEW OF SDOF CONCEPTS
F(t) y(t)
M
c k
Fig. 1 SDOF Oscil lator
Equation of motion describing dynamic equilibrium:
)(t F ky y c y M =++ &&& (1)
it is useful to examine several limiting cases:
A) FREE UNDAMPED VIBRATIONS (HOMOGENEOUS EQUATION)
i.e. F(t) = 0 and c=0
0=+ ky y M && (2)
and assuming the motion of the mass can be described by the sum
of sinusoidal components:
t C t C t y oo cossin)( 21 += (3)
whereM k
o= the undamped natural frequency
Constants C 1 and C 2 are determined from initial conditions
(e.g. if the mass isheld at a given initial displacement and
released, C 1 = 0 and C 2 = y o )
the motion can also be written in terms of an initial
displacement and a phase-shift:
)sin()( += t y t y oo (4)
-
7/28/2019 Review of Sdof Concepts
2/7
CEE490b
Page 2 of 7
where the initial displacement oy , is:
)( 2221 C C y o += (5a)
and the phase-shift , is:
)/(tan 121 C C = (5b)
B) FREE DAMPED VIBRATIONS (HOMOGENEOUS EQUATIONS)
0=++ ky y c y M &&& divide by M
0=++ y M k
y M c
y &&& (6)
and introducing; M k o /2 = and M c /2 =
02 2 =++ y y y o &&& (7)
a Particular Solution to this differential equation is:
pt Cey = so pt Cpey =& and pt eCpy 2=&&
substituting, we now get a quadratic equation in the variable, p
:
222,1
22
2,1
22
2442
02
=
=
=++
p
p
p p
(8abc)
defining the damping ratio as: == /D , then:
122,1
= D po
(9)
therefore the solution (magnitude of the motion), depends on the
magnitudeof the damping D, relative to 1. There are 3 possible
situations:
D is less than 1 (termed subcritical damping)D is equal to 1
(termed critical damping), orD is greater than 1 (termed
supercritical damping)
-
7/28/2019 Review of Sdof Concepts
3/7
CEE490b
Page 3 of 7
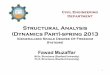
Fig. 2. Free Damped Oscil lations ( f = 1.0 Hz, D = 0.032, cri
tical andsupercritical)
Only the Subcritical case with D < 1, results in oscilliatory
response. The other twocases are not relevant to civil
engineering.
For D < 1
The solution of free vibrations becomes:
)sin()( ' oot
o t ey t y += (10)
where 21 Doo = , the damped natural frequency
(recall that the undamped natural frequency, M k o /= )
For most civil engineering applications, the structural damping
is much less than 1,typically of the order of 0.001 (for a bridge
cable) to 0.05 (for cracked concrete) sofor practical purposes, oo
=
There are two important cases that arise with free damped
vibrations:
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 2 4 6 8 10
time, t
y ( t )
Sub-criticalCriticalSuper-critical
Peak
-
7/28/2019 Review of Sdof Concepts
4/7
CEE490b
Page 4 of 7
i) when the initial velocity is zero, but with a finite initial
amplitudeii) when the initial amplitude is zero, but with a finite
initial velocity
i) Ay o = and 0=oy &
t Ae
t Aet y
ot
ot
cos
cos)(
=(11)
The structural damping of a system (e.g. chimney, flagpole,
bridge) can beestimated by utilizing this relationship. Often, a
structure can be given an initialdisplacement, A, then released and
the subsequent decay with amplitude recorded.
The decrease in amplitude between successive cycles of vibration
is dependent onthe damping (recall that /=D ). The amplitude y(t)
for multiples of the period of
vibration N* )/2( o at the same point in the oscillation, will
yield a straight line when A AN /1+ is plotted vs. N
Fig. 3. Fit to Decay in Peak Amplitude Ratio vs. Cycle
Number
From the above fit, the structural damping would be: 2.051
2ln 1 ==
= + D
A A
N
N
(logarithmic decrement) or D= %2.3032.02
2.0 ==
N =5.00 Ln(A(N)/A(0))
0
2
4
6
8
10
12
1 10 A(N)/A(0)
N
-
7/28/2019 Review of Sdof Concepts
5/7
CEE490b
Page 5 of 7
ii) 0=oy and V y o =&
t eV
t eV
t y ot
oo
t
o
sinsin)( = (12)
An example of this type of situation would be with a body
initially at rest andexperience an impact with another body.
C) RESPONSE TO HARMONIC EXCITATION
t F ky y c y M o cos=++ &&& (13)
The steady-state response (once the influence of the initial
conditions is lost) is:
)cos()( += t K F t y o (14)
where st o y
K F = , the static deflection under force, oF
, the dynamic amplification factor, orthe mechanical
admittance
(15a)
, the phase angle between the excitation andthe response
(15b)
The complete solution is the summation of the steady-state
response and thesolution of the Homogeneous equation ( 0 =++ ky y c
y M &&& ), when evaluated withspecific initial
conditions.
)sin()cos()( ' oot
ost t ey t y t y +++= (16)
y(t) = Steady-state Solution + Transient Solution
the transient solution damps out or disappears when the initial
disturbanceis past.
2/1
2
22
2
2
2
41
1
+
=
oo
D
( )
=
21
/1/2
tano
oD
-
7/28/2019 Review of Sdof Concepts
6/7
CEE490b
Page 6 of 7
STEADY-STATE RESONANT VIBRATIONS
At resonance, the excitation frequency, is equal to the natural
frequency, o , andthe dynamic amplification factor becomes:
DD
212/1
24
1 =
= (17a)
The phase angle becomes:
290
02
tan1 ==
= oD (17b)
The response becomes:
)2
cos(21
)(
= t
Dy t y st (18)
The maximum response is:
Dy t y st 2
1)( max = (19)
-
7/28/2019 Review of Sdof Concepts
7/7
CEE490b
Page 7 of 7
a) Constant Force Excitation
t P t P o cos)( = and )cos()( += t k P
t y o
b) Quadratic Excitation, wheremem
y
eo /2
2
==
t emt P e cos)(2= and )cos()cos()( 2
22
+=+= t m
emt
k em
t y o
ee
Fig. 4. Dimensionless response to Harmonic Loads(Dynamic
Amplitudes and Phase Shift)