Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 982597 13 pageshttpdxdoiorg1011552013982597
Review ArticleModeling and Control of Wind Turbine
Luis Arturo Soriano1 Wen Yu1 and Jose de Jesus Rubio2
1 Departamento de Control Automatico CINVESTAV National Polytechnic Institute 07360 Mexico City DF Mexico2 Seccion de Estudios de Posgrado e Investigacion ESIME Azcapotzalco National Polytechnic Institute 02250Mexico City DF Mexico
Correspondence should be addressed to Wen Yu yuwctrlcinvestavmx
Received 15 April 2013 Revised 23 June 2013 Accepted 26 June 2013
Academic Editor Ming-Hung Hsu
Copyright copy 2013 Luis Arturo Soriano et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
In recent years the energy production by wind turbines has been increasing because its production is environmentally friendlytherefore the technology developed for the production of energy throughwind turbines brings great challenges in the investigationThis paper studies the characteristics of the wind turbine in the market and lab it is focused on the recent advances of the windturbine modeling with the aerodynamic power and the wind turbine control with the nonlinear fuzzy and predictive techniques
1 Introduction
Wind energy is gaining increasing importance worldwideThe processes of industrialization and economic develop-ment require energy Fuels are the main energy resourcein the world and are at the center of the energy demands[1ndash4] Wind turbines using aerodynamic lift can be dividedaccording to the orientation of the axis of rotation on thehorizontal axis and vertical axis turbines The horizontal axisor propeller-type approach currently dominates wind turbineapplications [5] A horizontal axis wind turbine comprises atower a nacelle is mounted on top of the tower The nacellecontains the generator gearbox and rotor There are severalmechanisms to signal the gondola to the wind direction or tomove the nacelle of the wind in the case of high wind speedsIn small turbines the rotor and nacelle are oriented into thewind with a tail vane In larger turbines the gondola with therotor is electrically yawed out of the wind in or in response toa signal from a vane
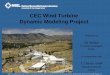
Horizontal axis wind turbines typically use a differentnumber of blades depending on the purpose of the windturbine Turbineswith two sheets or three blades are generallyused for power generation The most common design ofmodern turbines is based on the horizontal shaft structureThis design of wind turbine towers is assembled as shown inFigure 1 The role of the tower is to raise the wind turbine
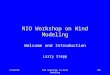
above the ground to intercept the strongest winds to get moreenergyWind energy has evolved rapidly during the past threedecades with increasing diameters of the rotor and the useof sophisticated power electronics to allow operation at rotorspeed varies see Figure 2
These turbines are operated such tightly that when youturn the rotor plane to be positioned directly upwind ofthe tower through the use of a yaw motor that rotates theentire nacelle (housing for all components in the uppertower) Wind passes through the turbine blades and thisthen produces lift inducing a torque [2 6] The aerodynamictorque captured by the blades is transferred to the hub whichconnects the blades to a power train and after a generatorTypically the drive train includes a scale gearbox rotationspeed and torque levels that are suitable for the configurationof the generator Although the gearbox is still used in mostturbines direct drive wind turbines developed to connectthe shaft of the generator directly with one axis to increasereliability and reducemaintenance costs are largely associatedwith gearbox failures
The aimof this survey is to address all the aspects involvedin wind turbines Compared to the previous reviews thisliterature discusses the dynamic modeling of wind turbinesactuators and wind turbines-actuator combined system indetail using both linear and nonlinear methods The paperdeals with different control strategies including the nonlinear
2 Mathematical Problems in Engineering
Blade
Hub
Nacelle
GeneratorDrive train
Gearbox
Tower
Rotor
Figure 1 A horizontal axis wind turbine [7 8]
0
Roto
r dia
met
er (m
)
rated capacity (MW)1st year of operation
005 03 05 13 16 45 5 75 8102
Airbus A380Wing span 80 m
15 m
112 m
126 m
126 m
160 m
250 m
99840085 99840087 99840089 99840091 99840093 99840095 99840097 99840099 99840001 99840003 99840005 99840010
Figure 2 Evolution of the wind turbine dimensions
fuzzy logic and predictive control techniques The surveyconcludes with some of the observations noticed throughoutthe review
2 Wind Turbine Structure
Thewind turbines can be classified based on thier orientationand thier axis of rotation into horizontal axis wind turbines(HAWT) and vertical axis wind turbines (VAWT) which canbe installed on the land or sea [1 3] The HAWT featurehigher wind energy conversion efficiency due to the bladedesign and access to stronger wind but they need a strongertower to support the heavy weight if the nacelle and itsinstallation cost is higher The VAWT have the advantageof lower installation however their wind energy conversionefficiency is lower due to the weaker wind on the lowerportion of the blades and limited aerodynamic performance
of the blades [9] A comparison between the horizontal andvertical axis wind turbines is summarized in Table 1
Another form to classify the wind turbines is by speedcontrol methods and power control methods The windenergy conversion is divided into fixed and variable speeds[10] As the name suggests fixed speedwind turbines (FSWT)rotate at almost a constant speed which is determinedby the gear ratio grid frequency and number of poles ofthe generator The maximum conversion efficiency can beachieved only at a givenwind speed and the system efficiencydegrades at other wind speeds The wind turbine is protectedby aerodynamic control of the blades from possible damagecaused by high wind gusts On the other hand variablespeed wind turbines (VSWT) can achieve maximum energyconversion efficiency over a wide range of wind speeds Theturbine can continuously adjust its rotational speed accordingto thewind speed In doing so the tip speed radiowhich is the
Mathematical Problems in Engineering 3
Table 1 Properties of HAWT over VAWT
Advantages
HAWT (i) Higher wind energy conversion efficiency(ii) Access to stronger wind due to high tower
VAWT(i) Lower installation cost and easier maintenancedue to the ground level gearbox and generator(ii) Operation independent of wind directionDisadvantages
HAWT(i) Higher installation cost stronger tower tosupport heavy weight of nacelle(ii) The orientation is required
VAWT (i) Lower wind energy conversion efficiency(ii) Higher torque fluctuations and prone tomechanical vibrations
ratio of the blade tip speed to the wind speed can be kept atan optimal value to achieve the maximum power conversionefficiency at differentwind speeds A comparison between thefixed speed wind and variable speed turbines is summarizedin Table 2
21 Generator Basically a wind turbine can be equippedwithany type of three-phase generator Today the demand forthe grid-compatible electric current can be met by frequencyconverters when the generator supplies the alternating cur-rent (AC) of variable frequency or direct current (DC)Synchronous and asynchronous generators are the mostcommon devices that are used in wind turbines [1 3 5 11ndash14] as shown in Figures 3 4 5 and 6 They are classified intofour types
(1) asynchronous (induction) generator
(i) squirrel cage induction generator (SCIG) [1516] see Figure 3
(ii) wound rotor induction generator (WRIG) [1117 18] see Figure 4
(2) synchronous generator
(i) permanent magnet synchronous generator(PMSG) [19] see Figure 5
(ii) wound rotor synchronous generator (WRSG)[20] see Figure 6
(3) other types of potential interest
(i) high-voltage generator (HVG) [21 22](ii) switch reluctance generator (SRG) [23 24](iii) transverse flux generator (TFG) [25 26]
Wind turbine configurations can also be classified withboth the speed control and power control criterion [10] seeTable 3
The advantages and disadvantages of these typical windturbine configurations are as follows
Table 2 Advantages and disadvantages of FSWT and VSWT [9]
Advantages
FSWT (i) Simple robust reliable(ii) Low cost and maintenance
VSWT(i) High energy conversion efficiency(ii) Improved power quality(iii) Reduced mechanical stressDisadvantages
FSWT(i) Relatively low energy conversion efficiency(ii) High mechanical stress(iii) High power fluctuations to the grid
VSWT (i) Additional cost and losses due to use of converters(ii) More complex control system
Gear Grid
SCIG Soft-starter
Capacitor bank
Figure 3 A Wind Turbine with a Squirrel Cage Induction Genera-tor [5]
(A) Fixed speed This configuration denotes the fixedspeed wind turbine with an SCIG directly connectedto the grid via a transformer [21 23]
(A0) Passive Stall Control This is the conventionalconcept applied by many Danish wind turbinemanufacturers during the years 1980 and 1990that is a postwindward-regulated three-bladedwind turbine concept It has been very popularbecause of its relatively low cost its simplicityand robustness Passive stall controlled windturbines cannot start assisted conduct whichmeans that the power of the turbine cannotbe controlled during the connection sequence[18 20]
(A1) Pitch control This also has been present in themarket The main advantage is that it facilitatespower control capacity the start and emergencystop control Its main drawback is that at highwind speeds even small variations in windspeed result in large variations in output powerThe pitchmechanism is not fast enough to avoidsuch power fluctuations For releasing the sheetthe slow variations in wind can compensatenevertheless this is not possible in the case ofgusts [17 25]
(A2) Active stall control It has recently become pop-ular This configuration basically maintains allthe features of power quality controlled systemshutdownThe improvements are in a better uti-lization of the overall system as a result of usingactive stall control The flexible coupling of the
4 Mathematical Problems in Engineering
Gear Grid
WRIG Soft-starter
Capacitor bank
Variable resistance
Figure 4 B Wind Turbine with aWound Rotor Induction Genera-tor [5]
Gear Grid
WRIG
Partial-scalefrequency converter
simsim
Figure 5 C Wind Turbine with a Permanent Magnet SynchronousGenerator [5]
blades to the hub also facilitates emergency stopand startups A disadvantage is the highest pricethat raises the pitch mechanism and controller[15 24]
(B) Limited variable speed This configuration corre-sponds to the limited variable speed wind turbinewith variable generator rotor resistance It uses aWRIG [26]
(C) Variable speed with partial-scale frequency converterThis configuration known as the DFIG correspondsto the limited variable speed of the wind turbine witha WRIG and partial-scale frequency converter on therotor circuit [19]
(D) Variable speed with full-scale frequency converterThisconfiguration corresponds to the full variable speedwind turbine with the generator being connectedto the grid through a full-scale frequency converterThe frequency converter performs the reactive powercompensation and the smoother grid connectionThegenerator can be excited electrically by a WRSGWRIG or PMSG [11]
Therefore as illustrated inTable 3 TypeB0 TypeB2 TypeC0 Type C2 Type D0 and Type D2 are not used in todayrsquoswind turbine industry [5]
22 Soft Starter The soft starter is a component of simpleand inexpensive electrical power used in fixed speed windturbines during grid connection see Figures 3 and 4 Thesoft starter function is to reduce the input current limitingdisruptions to the networkWithout a smooth start the inputcurrent can be up to 7-8 times of the rated current which can
Gear Grid
PMSGWRSGWRIG
Full-scalefrequency converter
simsim
Figure 6 D Wind Turbine with a Wound Rotor SynchronousGenerator [5]
Table 3 Wind turbine classification [5]
Speed control Power controlPassive stall Pitch Active stall
Fixed speed A A0 A1 A2
Variable speedB B0 B1 B2C C0 C1 C2D D0 D1 D2
cause serious disturbances in the network voltage The softstarter contains two thyristors as switching devices in eachphase [5]
They are connected antiparallel to each phase Thesmooth connection of the generator to the network over apredefined number of grating periods is accomplished byadjusting the firing angle 120572 of the thyristors The relationshipbetween the firing angle and the resulting amplification of thesoft starter is highly nonlinear and is also a function of thepower factor connected element After the in-rush thyristorsare bridged to reduce overall system losses
23 Capacitor Bank The capacitor bank is used in fixedspeed wind turbines or limited variable speed see Figures3 and 4 It is an electrical component that supplies powerto the induction generator reactive Thus the reactive powerabsorbed by the generator of the grid is minimized [27]The wind turbine generators may have a full load dynamiccompensation where a number of capacitors are connectedor disconnected continuously depending on the reactivepower demand of the generator during a predefined timeperiod
The capacitor banks are usuallymounted in the bottom ofthe tower or the nacelle that is at the top of the wind turbineThey can be very charged and damaged in the event of surgeson the network and consequently it may increase the cost ofmaintenance
24 Rectifiers and Inverters Diodes can only be used in therectification mode while the electronic switches can be usedin the rectification and inversion mode [23 28] The mostcommon solution is the rectifier diode rectifier because of itssimplicity low cost and low losses It is nonlinear in natureand accordingly generates harmonic currents Another draw-back is that it permits only unidirectional power flow andcannot control the voltage or current generator [5]Thereforeit is only used with a generator which can control the tensionandwith an inverter (eg one IGBT) that can control the flow
Mathematical Problems in Engineering 5
The thyristor (grid-commutated) based solution is cheapinvestor with low losses and as the name suggests must beconnected to the network to be able to operate Unfortunatelyconsuming reactive power and harmonics produces a largeincreasing demand of power quality and makes the self-commutated thyristor less attractive for the investors than theGTO or IGBT convertersThe advantage of a GTO inverter isthat it can handle more power than the IGBT neverthelessthis feature is less important in the future due to the rapiddevelopment of the IGBTThe disadvantage of this is that thecontrol circuit of the GTO valve is more complicated
The generator and the rectifier must be selected as acombination (ie a solution) while the investor can choosealmost independently of the generator and the rectifier Arectifier diode or a thyristor rectifier can be used only togetherwith a synchronous generator as it requires no reactivecurrent magnetization In opposition to this rectifiers GTOIGBT have to be used with induction generators variablespeed because they are able to control the reactive powerHowever despite the IGBT is a very attractive option has thedisadvantages of high cost and high losses The synchronousgeneratorwith a diode rectifier for example has amuch lowertotal cost than equivalent induction generator IGBT inverteror a rectifier
25 Frequency Converters A traditional frequency converteralso called an adjustable speed drive consists of
(i) a rectifier (AC-DC conversion unit) to convert alter-nating current into direct current while the energyflows into the DC system
(ii) energy storage (capacitors)(iii) an inverter (DC-AC with controllable frequency and
voltage) to convert direct current into alternatingcurrent while the energy flows to the AC side
There are different ways to combine a rectifier and aninverter into a frequency converter In recent years differentconverter topologies have been investigated as to whether itcan be applied in wind turbines
(i) back-to-back converters [26](ii) multilevel converters [26](iii) tandem converters [11](iv) matrix converters [11](v) resonant converters [11]
3 Modeling of the Wind Turbine
Since vertical axis wind turbines have very low startingtorque as well as dynamic stability problems they arecommonly found in small wind applications On the otherhand horizontal axis wind turbines are the most commonwind turbines and are most commonly used for wind farmscommunity wind projects and small wind applications Inthis paper we only discuss themodeling and controlmethodsof horizontal axis wind turbines
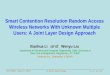
31 Modeling Based on the Aerodynamic The aerodynamicmodeling of the wind turbine has been studied and ispresented in several research papers as [1 10 11 26 28ndash32]The kinetic energy obtained by the blades of the wind istransformed into mechanical torque at the rotor shaft of thewind turbine the model can be described of in spoiler seeFigure 7
The blades are attached to the rotor with the tip speed120596rot sdot 119903 where 119903 is the length of the blade [33] The profileof the blade experiences a relative wind speed generatedby overlapping the tip speed and wind speed 120592
119908 Wind is
introduced from the lift profile (119871) and drag forces (119863) on theblade resulting in the movement of these forces blade windenergy which is called the aerodynamic power 119875
119908given as
follows [1]
119875119908=
1
2
120588air sdot 119860119903 sdot 119888119901 (120582 120599) sdot 1205923
119908 (1)
where 120588air is the air density 120592119908
is the free wind speedexperienced by the rotor 119860 is the swept rotor area and 119888
119901is
the power coefficientThe power coefficient depends upon the pitch angle 120599 and
the tip-speed-ratio 120582 [1]
120582 =
120596rot sdot 119903
120592119908
(2)
Thepower coefficient 119888119901is typically given in a formof Figure 8
[30 34]The torque on the rotor shaft (see Figure 9) which is
important for the axis model can be calculated from thepower with the aid of the rotational speed [33 35]
119879119860=
119875119908
120596119903
(3)
where120596119903is the wind turbine speed (velocity of the rotor) and
119879119860is the aerodynamic torque
32Modeling Based on theMechanical Property In the powersystem analysis the following four types of drive trainmodelsare usually used for the wind turbine available
(i) six-mass drive train model [29](ii) three-mass drive train model [29](iii) two-mass shaft model [11](iv) one-mass or lumped model [36]
The simplified model of the power train is shown inFigure 9 In this model all masses are grouped into low andhigh speed shaft [1 35] This model is sufficient for transientstability analysis with a fixed speed The inertia of the lowspeed shaft comes mainly from the rotating blades and theinertia of the high speed shaft It is important to include allsmallmasses of high speed shaft since they have an importantinfluence on the dynamic system due to the transformation ofthe transmission ratioThe stiffness and damping of the shaftare combined in equivalent stiffness and damping placed
6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Blade
Hub
Nacelle
GeneratorDrive train
Gearbox
Tower
Rotor
Figure 1 A horizontal axis wind turbine [7 8]
0
Roto
r dia
met
er (m
)
rated capacity (MW)1st year of operation
005 03 05 13 16 45 5 75 8102
Airbus A380Wing span 80 m
15 m
112 m
126 m
126 m
160 m
250 m
99840085 99840087 99840089 99840091 99840093 99840095 99840097 99840099 99840001 99840003 99840005 99840010
Figure 2 Evolution of the wind turbine dimensions
fuzzy logic and predictive control techniques The surveyconcludes with some of the observations noticed throughoutthe review
2 Wind Turbine Structure
Thewind turbines can be classified based on thier orientationand thier axis of rotation into horizontal axis wind turbines(HAWT) and vertical axis wind turbines (VAWT) which canbe installed on the land or sea [1 3] The HAWT featurehigher wind energy conversion efficiency due to the bladedesign and access to stronger wind but they need a strongertower to support the heavy weight if the nacelle and itsinstallation cost is higher The VAWT have the advantageof lower installation however their wind energy conversionefficiency is lower due to the weaker wind on the lowerportion of the blades and limited aerodynamic performance
of the blades [9] A comparison between the horizontal andvertical axis wind turbines is summarized in Table 1
Another form to classify the wind turbines is by speedcontrol methods and power control methods The windenergy conversion is divided into fixed and variable speeds[10] As the name suggests fixed speedwind turbines (FSWT)rotate at almost a constant speed which is determinedby the gear ratio grid frequency and number of poles ofthe generator The maximum conversion efficiency can beachieved only at a givenwind speed and the system efficiencydegrades at other wind speeds The wind turbine is protectedby aerodynamic control of the blades from possible damagecaused by high wind gusts On the other hand variablespeed wind turbines (VSWT) can achieve maximum energyconversion efficiency over a wide range of wind speeds Theturbine can continuously adjust its rotational speed accordingto thewind speed In doing so the tip speed radiowhich is the
Mathematical Problems in Engineering 3
Table 1 Properties of HAWT over VAWT
Advantages
HAWT (i) Higher wind energy conversion efficiency(ii) Access to stronger wind due to high tower
VAWT(i) Lower installation cost and easier maintenancedue to the ground level gearbox and generator(ii) Operation independent of wind directionDisadvantages
HAWT(i) Higher installation cost stronger tower tosupport heavy weight of nacelle(ii) The orientation is required
VAWT (i) Lower wind energy conversion efficiency(ii) Higher torque fluctuations and prone tomechanical vibrations
ratio of the blade tip speed to the wind speed can be kept atan optimal value to achieve the maximum power conversionefficiency at differentwind speeds A comparison between thefixed speed wind and variable speed turbines is summarizedin Table 2
21 Generator Basically a wind turbine can be equippedwithany type of three-phase generator Today the demand forthe grid-compatible electric current can be met by frequencyconverters when the generator supplies the alternating cur-rent (AC) of variable frequency or direct current (DC)Synchronous and asynchronous generators are the mostcommon devices that are used in wind turbines [1 3 5 11ndash14] as shown in Figures 3 4 5 and 6 They are classified intofour types
(1) asynchronous (induction) generator
(i) squirrel cage induction generator (SCIG) [1516] see Figure 3
(ii) wound rotor induction generator (WRIG) [1117 18] see Figure 4
(2) synchronous generator
(i) permanent magnet synchronous generator(PMSG) [19] see Figure 5
(ii) wound rotor synchronous generator (WRSG)[20] see Figure 6
(3) other types of potential interest
(i) high-voltage generator (HVG) [21 22](ii) switch reluctance generator (SRG) [23 24](iii) transverse flux generator (TFG) [25 26]
Wind turbine configurations can also be classified withboth the speed control and power control criterion [10] seeTable 3
The advantages and disadvantages of these typical windturbine configurations are as follows
Table 2 Advantages and disadvantages of FSWT and VSWT [9]
Advantages
FSWT (i) Simple robust reliable(ii) Low cost and maintenance
VSWT(i) High energy conversion efficiency(ii) Improved power quality(iii) Reduced mechanical stressDisadvantages
FSWT(i) Relatively low energy conversion efficiency(ii) High mechanical stress(iii) High power fluctuations to the grid
VSWT (i) Additional cost and losses due to use of converters(ii) More complex control system
Gear Grid
SCIG Soft-starter
Capacitor bank
Figure 3 A Wind Turbine with a Squirrel Cage Induction Genera-tor [5]
(A) Fixed speed This configuration denotes the fixedspeed wind turbine with an SCIG directly connectedto the grid via a transformer [21 23]
(A0) Passive Stall Control This is the conventionalconcept applied by many Danish wind turbinemanufacturers during the years 1980 and 1990that is a postwindward-regulated three-bladedwind turbine concept It has been very popularbecause of its relatively low cost its simplicityand robustness Passive stall controlled windturbines cannot start assisted conduct whichmeans that the power of the turbine cannotbe controlled during the connection sequence[18 20]
(A1) Pitch control This also has been present in themarket The main advantage is that it facilitatespower control capacity the start and emergencystop control Its main drawback is that at highwind speeds even small variations in windspeed result in large variations in output powerThe pitchmechanism is not fast enough to avoidsuch power fluctuations For releasing the sheetthe slow variations in wind can compensatenevertheless this is not possible in the case ofgusts [17 25]
(A2) Active stall control It has recently become pop-ular This configuration basically maintains allthe features of power quality controlled systemshutdownThe improvements are in a better uti-lization of the overall system as a result of usingactive stall control The flexible coupling of the
4 Mathematical Problems in Engineering
Gear Grid
WRIG Soft-starter
Capacitor bank
Variable resistance
Figure 4 B Wind Turbine with aWound Rotor Induction Genera-tor [5]
Gear Grid
WRIG
Partial-scalefrequency converter
simsim
Figure 5 C Wind Turbine with a Permanent Magnet SynchronousGenerator [5]
blades to the hub also facilitates emergency stopand startups A disadvantage is the highest pricethat raises the pitch mechanism and controller[15 24]
(B) Limited variable speed This configuration corre-sponds to the limited variable speed wind turbinewith variable generator rotor resistance It uses aWRIG [26]
(C) Variable speed with partial-scale frequency converterThis configuration known as the DFIG correspondsto the limited variable speed of the wind turbine witha WRIG and partial-scale frequency converter on therotor circuit [19]
(D) Variable speed with full-scale frequency converterThisconfiguration corresponds to the full variable speedwind turbine with the generator being connectedto the grid through a full-scale frequency converterThe frequency converter performs the reactive powercompensation and the smoother grid connectionThegenerator can be excited electrically by a WRSGWRIG or PMSG [11]
Therefore as illustrated inTable 3 TypeB0 TypeB2 TypeC0 Type C2 Type D0 and Type D2 are not used in todayrsquoswind turbine industry [5]
22 Soft Starter The soft starter is a component of simpleand inexpensive electrical power used in fixed speed windturbines during grid connection see Figures 3 and 4 Thesoft starter function is to reduce the input current limitingdisruptions to the networkWithout a smooth start the inputcurrent can be up to 7-8 times of the rated current which can
Gear Grid
PMSGWRSGWRIG
Full-scalefrequency converter
simsim
Figure 6 D Wind Turbine with a Wound Rotor SynchronousGenerator [5]
Table 3 Wind turbine classification [5]
Speed control Power controlPassive stall Pitch Active stall
Fixed speed A A0 A1 A2
Variable speedB B0 B1 B2C C0 C1 C2D D0 D1 D2
cause serious disturbances in the network voltage The softstarter contains two thyristors as switching devices in eachphase [5]
They are connected antiparallel to each phase Thesmooth connection of the generator to the network over apredefined number of grating periods is accomplished byadjusting the firing angle 120572 of the thyristors The relationshipbetween the firing angle and the resulting amplification of thesoft starter is highly nonlinear and is also a function of thepower factor connected element After the in-rush thyristorsare bridged to reduce overall system losses
23 Capacitor Bank The capacitor bank is used in fixedspeed wind turbines or limited variable speed see Figures3 and 4 It is an electrical component that supplies powerto the induction generator reactive Thus the reactive powerabsorbed by the generator of the grid is minimized [27]The wind turbine generators may have a full load dynamiccompensation where a number of capacitors are connectedor disconnected continuously depending on the reactivepower demand of the generator during a predefined timeperiod
The capacitor banks are usuallymounted in the bottom ofthe tower or the nacelle that is at the top of the wind turbineThey can be very charged and damaged in the event of surgeson the network and consequently it may increase the cost ofmaintenance
24 Rectifiers and Inverters Diodes can only be used in therectification mode while the electronic switches can be usedin the rectification and inversion mode [23 28] The mostcommon solution is the rectifier diode rectifier because of itssimplicity low cost and low losses It is nonlinear in natureand accordingly generates harmonic currents Another draw-back is that it permits only unidirectional power flow andcannot control the voltage or current generator [5]Thereforeit is only used with a generator which can control the tensionandwith an inverter (eg one IGBT) that can control the flow
Mathematical Problems in Engineering 5
The thyristor (grid-commutated) based solution is cheapinvestor with low losses and as the name suggests must beconnected to the network to be able to operate Unfortunatelyconsuming reactive power and harmonics produces a largeincreasing demand of power quality and makes the self-commutated thyristor less attractive for the investors than theGTO or IGBT convertersThe advantage of a GTO inverter isthat it can handle more power than the IGBT neverthelessthis feature is less important in the future due to the rapiddevelopment of the IGBTThe disadvantage of this is that thecontrol circuit of the GTO valve is more complicated
The generator and the rectifier must be selected as acombination (ie a solution) while the investor can choosealmost independently of the generator and the rectifier Arectifier diode or a thyristor rectifier can be used only togetherwith a synchronous generator as it requires no reactivecurrent magnetization In opposition to this rectifiers GTOIGBT have to be used with induction generators variablespeed because they are able to control the reactive powerHowever despite the IGBT is a very attractive option has thedisadvantages of high cost and high losses The synchronousgeneratorwith a diode rectifier for example has amuch lowertotal cost than equivalent induction generator IGBT inverteror a rectifier
25 Frequency Converters A traditional frequency converteralso called an adjustable speed drive consists of
(i) a rectifier (AC-DC conversion unit) to convert alter-nating current into direct current while the energyflows into the DC system
(ii) energy storage (capacitors)(iii) an inverter (DC-AC with controllable frequency and
voltage) to convert direct current into alternatingcurrent while the energy flows to the AC side
There are different ways to combine a rectifier and aninverter into a frequency converter In recent years differentconverter topologies have been investigated as to whether itcan be applied in wind turbines
(i) back-to-back converters [26](ii) multilevel converters [26](iii) tandem converters [11](iv) matrix converters [11](v) resonant converters [11]
3 Modeling of the Wind Turbine
Since vertical axis wind turbines have very low startingtorque as well as dynamic stability problems they arecommonly found in small wind applications On the otherhand horizontal axis wind turbines are the most commonwind turbines and are most commonly used for wind farmscommunity wind projects and small wind applications Inthis paper we only discuss themodeling and controlmethodsof horizontal axis wind turbines
31 Modeling Based on the Aerodynamic The aerodynamicmodeling of the wind turbine has been studied and ispresented in several research papers as [1 10 11 26 28ndash32]The kinetic energy obtained by the blades of the wind istransformed into mechanical torque at the rotor shaft of thewind turbine the model can be described of in spoiler seeFigure 7
The blades are attached to the rotor with the tip speed120596rot sdot 119903 where 119903 is the length of the blade [33] The profileof the blade experiences a relative wind speed generatedby overlapping the tip speed and wind speed 120592
119908 Wind is
introduced from the lift profile (119871) and drag forces (119863) on theblade resulting in the movement of these forces blade windenergy which is called the aerodynamic power 119875
119908given as
follows [1]
119875119908=
1
2
120588air sdot 119860119903 sdot 119888119901 (120582 120599) sdot 1205923
119908 (1)
where 120588air is the air density 120592119908
is the free wind speedexperienced by the rotor 119860 is the swept rotor area and 119888
119901is
the power coefficientThe power coefficient depends upon the pitch angle 120599 and
the tip-speed-ratio 120582 [1]
120582 =
120596rot sdot 119903
120592119908
(2)
Thepower coefficient 119888119901is typically given in a formof Figure 8
[30 34]The torque on the rotor shaft (see Figure 9) which is
important for the axis model can be calculated from thepower with the aid of the rotational speed [33 35]
119879119860=
119875119908
120596119903
(3)
where120596119903is the wind turbine speed (velocity of the rotor) and
119879119860is the aerodynamic torque
32Modeling Based on theMechanical Property In the powersystem analysis the following four types of drive trainmodelsare usually used for the wind turbine available
(i) six-mass drive train model [29](ii) three-mass drive train model [29](iii) two-mass shaft model [11](iv) one-mass or lumped model [36]
The simplified model of the power train is shown inFigure 9 In this model all masses are grouped into low andhigh speed shaft [1 35] This model is sufficient for transientstability analysis with a fixed speed The inertia of the lowspeed shaft comes mainly from the rotating blades and theinertia of the high speed shaft It is important to include allsmallmasses of high speed shaft since they have an importantinfluence on the dynamic system due to the transformation ofthe transmission ratioThe stiffness and damping of the shaftare combined in equivalent stiffness and damping placed
6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Table 1 Properties of HAWT over VAWT
Advantages
HAWT (i) Higher wind energy conversion efficiency(ii) Access to stronger wind due to high tower
VAWT(i) Lower installation cost and easier maintenancedue to the ground level gearbox and generator(ii) Operation independent of wind directionDisadvantages
HAWT(i) Higher installation cost stronger tower tosupport heavy weight of nacelle(ii) The orientation is required
VAWT (i) Lower wind energy conversion efficiency(ii) Higher torque fluctuations and prone tomechanical vibrations
ratio of the blade tip speed to the wind speed can be kept atan optimal value to achieve the maximum power conversionefficiency at differentwind speeds A comparison between thefixed speed wind and variable speed turbines is summarizedin Table 2
21 Generator Basically a wind turbine can be equippedwithany type of three-phase generator Today the demand forthe grid-compatible electric current can be met by frequencyconverters when the generator supplies the alternating cur-rent (AC) of variable frequency or direct current (DC)Synchronous and asynchronous generators are the mostcommon devices that are used in wind turbines [1 3 5 11ndash14] as shown in Figures 3 4 5 and 6 They are classified intofour types
(1) asynchronous (induction) generator
(i) squirrel cage induction generator (SCIG) [1516] see Figure 3
(ii) wound rotor induction generator (WRIG) [1117 18] see Figure 4
(2) synchronous generator
(i) permanent magnet synchronous generator(PMSG) [19] see Figure 5
(ii) wound rotor synchronous generator (WRSG)[20] see Figure 6
(3) other types of potential interest
(i) high-voltage generator (HVG) [21 22](ii) switch reluctance generator (SRG) [23 24](iii) transverse flux generator (TFG) [25 26]
Wind turbine configurations can also be classified withboth the speed control and power control criterion [10] seeTable 3
The advantages and disadvantages of these typical windturbine configurations are as follows
Table 2 Advantages and disadvantages of FSWT and VSWT [9]
Advantages
FSWT (i) Simple robust reliable(ii) Low cost and maintenance
VSWT(i) High energy conversion efficiency(ii) Improved power quality(iii) Reduced mechanical stressDisadvantages
FSWT(i) Relatively low energy conversion efficiency(ii) High mechanical stress(iii) High power fluctuations to the grid
VSWT (i) Additional cost and losses due to use of converters(ii) More complex control system
Gear Grid
SCIG Soft-starter
Capacitor bank
Figure 3 A Wind Turbine with a Squirrel Cage Induction Genera-tor [5]
(A) Fixed speed This configuration denotes the fixedspeed wind turbine with an SCIG directly connectedto the grid via a transformer [21 23]
(A0) Passive Stall Control This is the conventionalconcept applied by many Danish wind turbinemanufacturers during the years 1980 and 1990that is a postwindward-regulated three-bladedwind turbine concept It has been very popularbecause of its relatively low cost its simplicityand robustness Passive stall controlled windturbines cannot start assisted conduct whichmeans that the power of the turbine cannotbe controlled during the connection sequence[18 20]
(A1) Pitch control This also has been present in themarket The main advantage is that it facilitatespower control capacity the start and emergencystop control Its main drawback is that at highwind speeds even small variations in windspeed result in large variations in output powerThe pitchmechanism is not fast enough to avoidsuch power fluctuations For releasing the sheetthe slow variations in wind can compensatenevertheless this is not possible in the case ofgusts [17 25]
(A2) Active stall control It has recently become pop-ular This configuration basically maintains allthe features of power quality controlled systemshutdownThe improvements are in a better uti-lization of the overall system as a result of usingactive stall control The flexible coupling of the
4 Mathematical Problems in Engineering
Gear Grid
WRIG Soft-starter
Capacitor bank
Variable resistance
Figure 4 B Wind Turbine with aWound Rotor Induction Genera-tor [5]
Gear Grid
WRIG
Partial-scalefrequency converter
simsim
Figure 5 C Wind Turbine with a Permanent Magnet SynchronousGenerator [5]
blades to the hub also facilitates emergency stopand startups A disadvantage is the highest pricethat raises the pitch mechanism and controller[15 24]
(B) Limited variable speed This configuration corre-sponds to the limited variable speed wind turbinewith variable generator rotor resistance It uses aWRIG [26]
(C) Variable speed with partial-scale frequency converterThis configuration known as the DFIG correspondsto the limited variable speed of the wind turbine witha WRIG and partial-scale frequency converter on therotor circuit [19]
(D) Variable speed with full-scale frequency converterThisconfiguration corresponds to the full variable speedwind turbine with the generator being connectedto the grid through a full-scale frequency converterThe frequency converter performs the reactive powercompensation and the smoother grid connectionThegenerator can be excited electrically by a WRSGWRIG or PMSG [11]
Therefore as illustrated inTable 3 TypeB0 TypeB2 TypeC0 Type C2 Type D0 and Type D2 are not used in todayrsquoswind turbine industry [5]
22 Soft Starter The soft starter is a component of simpleand inexpensive electrical power used in fixed speed windturbines during grid connection see Figures 3 and 4 Thesoft starter function is to reduce the input current limitingdisruptions to the networkWithout a smooth start the inputcurrent can be up to 7-8 times of the rated current which can
Gear Grid
PMSGWRSGWRIG
Full-scalefrequency converter
simsim
Figure 6 D Wind Turbine with a Wound Rotor SynchronousGenerator [5]
Table 3 Wind turbine classification [5]
Speed control Power controlPassive stall Pitch Active stall
Fixed speed A A0 A1 A2
Variable speedB B0 B1 B2C C0 C1 C2D D0 D1 D2
cause serious disturbances in the network voltage The softstarter contains two thyristors as switching devices in eachphase [5]
They are connected antiparallel to each phase Thesmooth connection of the generator to the network over apredefined number of grating periods is accomplished byadjusting the firing angle 120572 of the thyristors The relationshipbetween the firing angle and the resulting amplification of thesoft starter is highly nonlinear and is also a function of thepower factor connected element After the in-rush thyristorsare bridged to reduce overall system losses
23 Capacitor Bank The capacitor bank is used in fixedspeed wind turbines or limited variable speed see Figures3 and 4 It is an electrical component that supplies powerto the induction generator reactive Thus the reactive powerabsorbed by the generator of the grid is minimized [27]The wind turbine generators may have a full load dynamiccompensation where a number of capacitors are connectedor disconnected continuously depending on the reactivepower demand of the generator during a predefined timeperiod
The capacitor banks are usuallymounted in the bottom ofthe tower or the nacelle that is at the top of the wind turbineThey can be very charged and damaged in the event of surgeson the network and consequently it may increase the cost ofmaintenance
24 Rectifiers and Inverters Diodes can only be used in therectification mode while the electronic switches can be usedin the rectification and inversion mode [23 28] The mostcommon solution is the rectifier diode rectifier because of itssimplicity low cost and low losses It is nonlinear in natureand accordingly generates harmonic currents Another draw-back is that it permits only unidirectional power flow andcannot control the voltage or current generator [5]Thereforeit is only used with a generator which can control the tensionandwith an inverter (eg one IGBT) that can control the flow
Mathematical Problems in Engineering 5
The thyristor (grid-commutated) based solution is cheapinvestor with low losses and as the name suggests must beconnected to the network to be able to operate Unfortunatelyconsuming reactive power and harmonics produces a largeincreasing demand of power quality and makes the self-commutated thyristor less attractive for the investors than theGTO or IGBT convertersThe advantage of a GTO inverter isthat it can handle more power than the IGBT neverthelessthis feature is less important in the future due to the rapiddevelopment of the IGBTThe disadvantage of this is that thecontrol circuit of the GTO valve is more complicated
The generator and the rectifier must be selected as acombination (ie a solution) while the investor can choosealmost independently of the generator and the rectifier Arectifier diode or a thyristor rectifier can be used only togetherwith a synchronous generator as it requires no reactivecurrent magnetization In opposition to this rectifiers GTOIGBT have to be used with induction generators variablespeed because they are able to control the reactive powerHowever despite the IGBT is a very attractive option has thedisadvantages of high cost and high losses The synchronousgeneratorwith a diode rectifier for example has amuch lowertotal cost than equivalent induction generator IGBT inverteror a rectifier
25 Frequency Converters A traditional frequency converteralso called an adjustable speed drive consists of
(i) a rectifier (AC-DC conversion unit) to convert alter-nating current into direct current while the energyflows into the DC system
(ii) energy storage (capacitors)(iii) an inverter (DC-AC with controllable frequency and
voltage) to convert direct current into alternatingcurrent while the energy flows to the AC side
There are different ways to combine a rectifier and aninverter into a frequency converter In recent years differentconverter topologies have been investigated as to whether itcan be applied in wind turbines
(i) back-to-back converters [26](ii) multilevel converters [26](iii) tandem converters [11](iv) matrix converters [11](v) resonant converters [11]
3 Modeling of the Wind Turbine
Since vertical axis wind turbines have very low startingtorque as well as dynamic stability problems they arecommonly found in small wind applications On the otherhand horizontal axis wind turbines are the most commonwind turbines and are most commonly used for wind farmscommunity wind projects and small wind applications Inthis paper we only discuss themodeling and controlmethodsof horizontal axis wind turbines
31 Modeling Based on the Aerodynamic The aerodynamicmodeling of the wind turbine has been studied and ispresented in several research papers as [1 10 11 26 28ndash32]The kinetic energy obtained by the blades of the wind istransformed into mechanical torque at the rotor shaft of thewind turbine the model can be described of in spoiler seeFigure 7
The blades are attached to the rotor with the tip speed120596rot sdot 119903 where 119903 is the length of the blade [33] The profileof the blade experiences a relative wind speed generatedby overlapping the tip speed and wind speed 120592
119908 Wind is
introduced from the lift profile (119871) and drag forces (119863) on theblade resulting in the movement of these forces blade windenergy which is called the aerodynamic power 119875
119908given as
follows [1]
119875119908=
1
2
120588air sdot 119860119903 sdot 119888119901 (120582 120599) sdot 1205923
119908 (1)
where 120588air is the air density 120592119908
is the free wind speedexperienced by the rotor 119860 is the swept rotor area and 119888
119901is
the power coefficientThe power coefficient depends upon the pitch angle 120599 and
the tip-speed-ratio 120582 [1]
120582 =
120596rot sdot 119903
120592119908
(2)
Thepower coefficient 119888119901is typically given in a formof Figure 8
[30 34]The torque on the rotor shaft (see Figure 9) which is
important for the axis model can be calculated from thepower with the aid of the rotational speed [33 35]
119879119860=
119875119908
120596119903
(3)
where120596119903is the wind turbine speed (velocity of the rotor) and
119879119860is the aerodynamic torque
32Modeling Based on theMechanical Property In the powersystem analysis the following four types of drive trainmodelsare usually used for the wind turbine available
(i) six-mass drive train model [29](ii) three-mass drive train model [29](iii) two-mass shaft model [11](iv) one-mass or lumped model [36]
The simplified model of the power train is shown inFigure 9 In this model all masses are grouped into low andhigh speed shaft [1 35] This model is sufficient for transientstability analysis with a fixed speed The inertia of the lowspeed shaft comes mainly from the rotating blades and theinertia of the high speed shaft It is important to include allsmallmasses of high speed shaft since they have an importantinfluence on the dynamic system due to the transformation ofthe transmission ratioThe stiffness and damping of the shaftare combined in equivalent stiffness and damping placed
6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Gear Grid
WRIG Soft-starter
Capacitor bank
Variable resistance
Figure 4 B Wind Turbine with aWound Rotor Induction Genera-tor [5]
Gear Grid
WRIG
Partial-scalefrequency converter
simsim
Figure 5 C Wind Turbine with a Permanent Magnet SynchronousGenerator [5]
blades to the hub also facilitates emergency stopand startups A disadvantage is the highest pricethat raises the pitch mechanism and controller[15 24]
(B) Limited variable speed This configuration corre-sponds to the limited variable speed wind turbinewith variable generator rotor resistance It uses aWRIG [26]
(C) Variable speed with partial-scale frequency converterThis configuration known as the DFIG correspondsto the limited variable speed of the wind turbine witha WRIG and partial-scale frequency converter on therotor circuit [19]
(D) Variable speed with full-scale frequency converterThisconfiguration corresponds to the full variable speedwind turbine with the generator being connectedto the grid through a full-scale frequency converterThe frequency converter performs the reactive powercompensation and the smoother grid connectionThegenerator can be excited electrically by a WRSGWRIG or PMSG [11]
Therefore as illustrated inTable 3 TypeB0 TypeB2 TypeC0 Type C2 Type D0 and Type D2 are not used in todayrsquoswind turbine industry [5]
22 Soft Starter The soft starter is a component of simpleand inexpensive electrical power used in fixed speed windturbines during grid connection see Figures 3 and 4 Thesoft starter function is to reduce the input current limitingdisruptions to the networkWithout a smooth start the inputcurrent can be up to 7-8 times of the rated current which can
Gear Grid
PMSGWRSGWRIG
Full-scalefrequency converter
simsim
Figure 6 D Wind Turbine with a Wound Rotor SynchronousGenerator [5]
Table 3 Wind turbine classification [5]
Speed control Power controlPassive stall Pitch Active stall
Fixed speed A A0 A1 A2
Variable speedB B0 B1 B2C C0 C1 C2D D0 D1 D2
cause serious disturbances in the network voltage The softstarter contains two thyristors as switching devices in eachphase [5]
They are connected antiparallel to each phase Thesmooth connection of the generator to the network over apredefined number of grating periods is accomplished byadjusting the firing angle 120572 of the thyristors The relationshipbetween the firing angle and the resulting amplification of thesoft starter is highly nonlinear and is also a function of thepower factor connected element After the in-rush thyristorsare bridged to reduce overall system losses
23 Capacitor Bank The capacitor bank is used in fixedspeed wind turbines or limited variable speed see Figures3 and 4 It is an electrical component that supplies powerto the induction generator reactive Thus the reactive powerabsorbed by the generator of the grid is minimized [27]The wind turbine generators may have a full load dynamiccompensation where a number of capacitors are connectedor disconnected continuously depending on the reactivepower demand of the generator during a predefined timeperiod
The capacitor banks are usuallymounted in the bottom ofthe tower or the nacelle that is at the top of the wind turbineThey can be very charged and damaged in the event of surgeson the network and consequently it may increase the cost ofmaintenance
24 Rectifiers and Inverters Diodes can only be used in therectification mode while the electronic switches can be usedin the rectification and inversion mode [23 28] The mostcommon solution is the rectifier diode rectifier because of itssimplicity low cost and low losses It is nonlinear in natureand accordingly generates harmonic currents Another draw-back is that it permits only unidirectional power flow andcannot control the voltage or current generator [5]Thereforeit is only used with a generator which can control the tensionandwith an inverter (eg one IGBT) that can control the flow
Mathematical Problems in Engineering 5
The thyristor (grid-commutated) based solution is cheapinvestor with low losses and as the name suggests must beconnected to the network to be able to operate Unfortunatelyconsuming reactive power and harmonics produces a largeincreasing demand of power quality and makes the self-commutated thyristor less attractive for the investors than theGTO or IGBT convertersThe advantage of a GTO inverter isthat it can handle more power than the IGBT neverthelessthis feature is less important in the future due to the rapiddevelopment of the IGBTThe disadvantage of this is that thecontrol circuit of the GTO valve is more complicated
The generator and the rectifier must be selected as acombination (ie a solution) while the investor can choosealmost independently of the generator and the rectifier Arectifier diode or a thyristor rectifier can be used only togetherwith a synchronous generator as it requires no reactivecurrent magnetization In opposition to this rectifiers GTOIGBT have to be used with induction generators variablespeed because they are able to control the reactive powerHowever despite the IGBT is a very attractive option has thedisadvantages of high cost and high losses The synchronousgeneratorwith a diode rectifier for example has amuch lowertotal cost than equivalent induction generator IGBT inverteror a rectifier
25 Frequency Converters A traditional frequency converteralso called an adjustable speed drive consists of
(i) a rectifier (AC-DC conversion unit) to convert alter-nating current into direct current while the energyflows into the DC system
(ii) energy storage (capacitors)(iii) an inverter (DC-AC with controllable frequency and
voltage) to convert direct current into alternatingcurrent while the energy flows to the AC side
There are different ways to combine a rectifier and aninverter into a frequency converter In recent years differentconverter topologies have been investigated as to whether itcan be applied in wind turbines
(i) back-to-back converters [26](ii) multilevel converters [26](iii) tandem converters [11](iv) matrix converters [11](v) resonant converters [11]
3 Modeling of the Wind Turbine
Since vertical axis wind turbines have very low startingtorque as well as dynamic stability problems they arecommonly found in small wind applications On the otherhand horizontal axis wind turbines are the most commonwind turbines and are most commonly used for wind farmscommunity wind projects and small wind applications Inthis paper we only discuss themodeling and controlmethodsof horizontal axis wind turbines
31 Modeling Based on the Aerodynamic The aerodynamicmodeling of the wind turbine has been studied and ispresented in several research papers as [1 10 11 26 28ndash32]The kinetic energy obtained by the blades of the wind istransformed into mechanical torque at the rotor shaft of thewind turbine the model can be described of in spoiler seeFigure 7
The blades are attached to the rotor with the tip speed120596rot sdot 119903 where 119903 is the length of the blade [33] The profileof the blade experiences a relative wind speed generatedby overlapping the tip speed and wind speed 120592
119908 Wind is
introduced from the lift profile (119871) and drag forces (119863) on theblade resulting in the movement of these forces blade windenergy which is called the aerodynamic power 119875
119908given as
follows [1]
119875119908=
1
2
120588air sdot 119860119903 sdot 119888119901 (120582 120599) sdot 1205923
119908 (1)
where 120588air is the air density 120592119908
is the free wind speedexperienced by the rotor 119860 is the swept rotor area and 119888
119901is
the power coefficientThe power coefficient depends upon the pitch angle 120599 and
the tip-speed-ratio 120582 [1]
120582 =
120596rot sdot 119903
120592119908
(2)
Thepower coefficient 119888119901is typically given in a formof Figure 8
[30 34]The torque on the rotor shaft (see Figure 9) which is
important for the axis model can be calculated from thepower with the aid of the rotational speed [33 35]
119879119860=
119875119908
120596119903
(3)
where120596119903is the wind turbine speed (velocity of the rotor) and
119879119860is the aerodynamic torque
32Modeling Based on theMechanical Property In the powersystem analysis the following four types of drive trainmodelsare usually used for the wind turbine available
(i) six-mass drive train model [29](ii) three-mass drive train model [29](iii) two-mass shaft model [11](iv) one-mass or lumped model [36]
The simplified model of the power train is shown inFigure 9 In this model all masses are grouped into low andhigh speed shaft [1 35] This model is sufficient for transientstability analysis with a fixed speed The inertia of the lowspeed shaft comes mainly from the rotating blades and theinertia of the high speed shaft It is important to include allsmallmasses of high speed shaft since they have an importantinfluence on the dynamic system due to the transformation ofthe transmission ratioThe stiffness and damping of the shaftare combined in equivalent stiffness and damping placed
6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
The thyristor (grid-commutated) based solution is cheapinvestor with low losses and as the name suggests must beconnected to the network to be able to operate Unfortunatelyconsuming reactive power and harmonics produces a largeincreasing demand of power quality and makes the self-commutated thyristor less attractive for the investors than theGTO or IGBT convertersThe advantage of a GTO inverter isthat it can handle more power than the IGBT neverthelessthis feature is less important in the future due to the rapiddevelopment of the IGBTThe disadvantage of this is that thecontrol circuit of the GTO valve is more complicated
The generator and the rectifier must be selected as acombination (ie a solution) while the investor can choosealmost independently of the generator and the rectifier Arectifier diode or a thyristor rectifier can be used only togetherwith a synchronous generator as it requires no reactivecurrent magnetization In opposition to this rectifiers GTOIGBT have to be used with induction generators variablespeed because they are able to control the reactive powerHowever despite the IGBT is a very attractive option has thedisadvantages of high cost and high losses The synchronousgeneratorwith a diode rectifier for example has amuch lowertotal cost than equivalent induction generator IGBT inverteror a rectifier
25 Frequency Converters A traditional frequency converteralso called an adjustable speed drive consists of
(i) a rectifier (AC-DC conversion unit) to convert alter-nating current into direct current while the energyflows into the DC system
(ii) energy storage (capacitors)(iii) an inverter (DC-AC with controllable frequency and
voltage) to convert direct current into alternatingcurrent while the energy flows to the AC side
There are different ways to combine a rectifier and aninverter into a frequency converter In recent years differentconverter topologies have been investigated as to whether itcan be applied in wind turbines
(i) back-to-back converters [26](ii) multilevel converters [26](iii) tandem converters [11](iv) matrix converters [11](v) resonant converters [11]
3 Modeling of the Wind Turbine
Since vertical axis wind turbines have very low startingtorque as well as dynamic stability problems they arecommonly found in small wind applications On the otherhand horizontal axis wind turbines are the most commonwind turbines and are most commonly used for wind farmscommunity wind projects and small wind applications Inthis paper we only discuss themodeling and controlmethodsof horizontal axis wind turbines
31 Modeling Based on the Aerodynamic The aerodynamicmodeling of the wind turbine has been studied and ispresented in several research papers as [1 10 11 26 28ndash32]The kinetic energy obtained by the blades of the wind istransformed into mechanical torque at the rotor shaft of thewind turbine the model can be described of in spoiler seeFigure 7
The blades are attached to the rotor with the tip speed120596rot sdot 119903 where 119903 is the length of the blade [33] The profileof the blade experiences a relative wind speed generatedby overlapping the tip speed and wind speed 120592
119908 Wind is
introduced from the lift profile (119871) and drag forces (119863) on theblade resulting in the movement of these forces blade windenergy which is called the aerodynamic power 119875
119908given as
follows [1]
119875119908=
1
2
120588air sdot 119860119903 sdot 119888119901 (120582 120599) sdot 1205923
119908 (1)
where 120588air is the air density 120592119908
is the free wind speedexperienced by the rotor 119860 is the swept rotor area and 119888
119901is
the power coefficientThe power coefficient depends upon the pitch angle 120599 and
the tip-speed-ratio 120582 [1]
120582 =
120596rot sdot 119903
120592119908
(2)
Thepower coefficient 119888119901is typically given in a formof Figure 8
[30 34]The torque on the rotor shaft (see Figure 9) which is
important for the axis model can be calculated from thepower with the aid of the rotational speed [33 35]
119879119860=
119875119908
120596119903
(3)
where120596119903is the wind turbine speed (velocity of the rotor) and
119879119860is the aerodynamic torque
32Modeling Based on theMechanical Property In the powersystem analysis the following four types of drive trainmodelsare usually used for the wind turbine available
(i) six-mass drive train model [29](ii) three-mass drive train model [29](iii) two-mass shaft model [11](iv) one-mass or lumped model [36]
The simplified model of the power train is shown inFigure 9 In this model all masses are grouped into low andhigh speed shaft [1 35] This model is sufficient for transientstability analysis with a fixed speed The inertia of the lowspeed shaft comes mainly from the rotating blades and theinertia of the high speed shaft It is important to include allsmallmasses of high speed shaft since they have an importantinfluence on the dynamic system due to the transformation ofthe transmission ratioThe stiffness and damping of the shaftare combined in equivalent stiffness and damping placed
6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Rotor plane
Rotor axis
120572
L
D
120596rot middot r
rel
w 120596rot
120599
Figure 7 Aerodynamic model [1]
05
04
03
02
01
151050120582
Cp
Figure 8 The power coefficient 119888119901versus the tip speed ratio [34]
on the low speed side The mass of the gearbox itself isinsignificant and abandoned
The input to themodel for a two-mass system is defined astorque 119879
119860 which is obtained by the aerodynamic system and
the generator reaction torque 119879119890 The output is the changes in
the rotor speed 120596119903and generator speed 120596
119892
The dynamic of high speed generator can be expressedas a machine model The differences in the mechanical drivetorque119879
119898 the generator torque reaction119879
119890 and torque losses
due to friction 119879fric cause the change of angular velocity 119892
[29]
119879119898minus 119879119890minus 119879fric = 119869
119892sdot 119892
119892=
sdotsdot
120593119892
(4)
Rotor Gearbox Generator
TAJr
TS
KS
DS120593r 120593s1TS
n
Tm120593s2120593gTm
Jg
Te Tfric
Figure 9 Drive train schematic for the modelling of a wind turbine[34]
The change of the angular speed 119903is caused by the difference
of the aerodynamic torque 119879119860and shaft torque 119879
119904at the low
speed [29]
119879119860minus 119879119878= 119869119903sdot 119903
119903=
sdotsdot
120593119903
(5)
The mechanical driving torque 119879119898and shaft torque 119879
119904are
connected by the gear ratio [29]
119879119898=
119879119904
119899
(6)
The dynamics of the shaft can be described by [29]
119879119904= 119870119904sdot Δ120593 + 119863
119904sdot Δ 120593
Δ = 119903minus
119892
119899
= 120596119903minus
120596119892
119899
(7)
The final drive train dynamics is as follows [29]
119903=
1
119869119903
(119879119860minus 119863119878sdot 120596119903+
119863119904
119899
120596119892minus 119870119904int(120596119903minus
120596119892
119899
) 119889119905)
119892=
1
119869119892
(minus119879119890minus (119863119892+
119863119904
1198992)120596119892
+
119863119904
119899
120596119903minus
119870119904
119899
int(120596119903minus
120596119892
119899
) 119889119905)
(8)
where 119870119904is the stiffness constant and 119863
119904is the damping
constant of the shaft To obtain the stiffness constant theeigen frequency of the drive train has to be known Considera two-mass free swinging system the eigen frequency is asfollows [29]
1205960119878
= 21205871198910119878
= radic
119870119904
119869ges (9)
The total inertia of the free swinging system on the low speedis calculated by [29]
119869ges =119869119903sdot 119869119892sdot 1198992
119869119903+ 119869119892sdot 1198992 (10)
Consequently the stiffness constant of the low speed shaft is[29]
119870119904= 119869ges sdot (21205871198910119878)
2
(11)
Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
The damping constant119863119904can be calculated by [29]
119863119904= 2120585119904sdot radic
119870119904sdot 119869ges
1205852
119904+ 41205872 (12)
where 120585119904is the logarithmic decrement
33 Linearized Model The aerodynamic torque 119879119860must be
opposed by an equal and opposite load torque 119879119871 for the
turbine to operate at steady speed If 119879119860is greater than 119879
119871
the turbine will accelerate while if 119879119860is less than 119879
119871 the
turbine will decelerate Equation (13) gives this mathematicaldescription where 119869
119879is the equivalent combined moment of
inertia of the rotor gear reducer and both the low speed andhigh speed shafts [37]
119869119879119879= 119879119860minus 119879119871 (13)
119879119871is the mechanical torque necessary to turn the gener-
ator and was assumed to be a constant value derived fromthe wind turbine plant physical properties The aerodynamictorque 119879
119860 is represent by (5) The power extracted from the
wind is shown in (1) This equation is nonlinear because thepower coefficient 119888
119901is highly nonlinear [37] To simplify the
analysis and design linear controllers we should linearize thismodel
Assuming 119879119860|119874119875
asymp 119879119871|119874119875 the linearization of (1) is [37]
119869119879 = 119869119879
120597
120597119906
10038161003816100381610038161003816100381610038161003816119874119875
Δ119906 + 119869119879
120597
120597120596
10038161003816100381610038161003816100381610038161003816119874119875
Δ120596 + 119869119879
120597
120597120573
10038161003816100381610038161003816100381610038161003816119874119875
Δ120573 (14)
In a simple form (14) becomes [37]
= 120572Δ119906 + 120574Δ120596 + 120575Δ120573 (15)
where Δ120596119879 Δ119906 and Δ120573 are the derivations at the operating
points 120596119879119874119875
119906119874119875 and 120573
119874119875 The parameters 120572 120574 and 120575 are
coefficients120572 120574 and 120575 represent the wind turbine dynamics at the
linearization point Their quantities depend on the windspeed and the partial derivatives of the coefficient of torque119888119901with respect to 120582 and 120573 The magnitudes of 120572 and 120575 are the
relative weight of the effect wind speed 119906 and pitch angle 120573 onthe wind turbine angular speed respectively Equation (15) isthe linear equation describing the wind turbine dynamics
The linear model (15) can be transformed by the Laplacetransformation as follows [37]
Δ120596 (119904) = [120572Δ119906 (119904) + 120575Δ120573 (119904)]
1
119904 minus 120574
(16)
The linearized model is at the angular rotation speed 120596119879119874119875
the wind speed 119906
119874119875 and the pitch angle 120573
119874119875 It represents
the change of rotor speed Δ120596 with respect to the inputs Δ119906andΔ120573Therefore the wind turbine is represented by the firstorder transfer function 119866
119901(119904) [37]
119866119901(119904) =
Δ120596 (119904)
120572Δ119906 + 120575Δ120573
=
Δ120596 (119904)
(Δ119879119860119869119879)
=
1
119904 minus 120574
(17)
4 Control of the Wind Turbine
There are many results on wind turbines control from theaerodynamic to generator energy In this paper we onlydiscuss the horizontal axis wind turbine and doubly fedinduction generator (DFIG) This type of wind turbine is themost used in the market [1]
The performance of the wind turbine depends not onlyon hardware also on the wind turbine control technique [38]Themain control objectives of the wind turbine are as follows[39 40]
(i) capture the wind power as possible as it can(ii) maximize the wind harvested power in partial load
zone(iii) guarantee a certain level of resilience of the mechani-
cal parts by alleviating the variable loads(iv) meet strict power quality standards (power factor
harmonics flicker etc)(v) transfer the electrical power to the grid at an imposed
level in wide range of wind velocities
The control system has three subsystems aerodynamiccontrol variable speed control and grid connection controlsee Figure 10 In the following sections several popularcontrol techniques will be discussed [41]
41 Aerodynamic Control The wind turbine aerodynamicsare very similar to the airplaneThe blade rotates in the windbecause the air flowing along the surface moves faster thanthe upwind surface This creates a lifting force to remove thesheet to rotate [30] The attack angle of the blade plays acritical role in determining the amount of force and torquegenerated by the turbine Therefore it is an effective meansto control the amount of power There are three methods toaerodynamically control for large wind turbines passive stallactive stall and pitch control
(i) Passive stall control the blade is fixed on the rotorhub in an optimum (nominal) attack angle Whenthe wind speed is less than or equal to the nominalvalue the turbine blades with the nominal attackangle capture the maximum possible power windWith wind speed above the nominal value the strongwind can cause turbulence on the surface of theblade which faces away from the wind As a resultthe lifting force is reduced and eventually disappearswith increasing wind speed by reducing the speed ofrotation of the turbine This phenomenon is calledstall The passive stall control does not need complexpitch mechanisms however the blades need a goodaerodynamic design
(ii) Active stall control the stall phenomenon can beinduced not only by higher wind speeds but alsoby increasing the attack of the blade Thus activestall wind turbines have blades with adjustable pitchcontrol mechanism When the wind speed exceedsthe rated value the blades are controlled towards the
8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Aerodynamicsdrive train
Electromagneticsubsystem
Gridconnectionsubsystem
Wind
stream grid
Electric
Pitchcontrol
Variable speedcontrol
Output powerconditioning
Control system
Figure 10 Main control subsystems of a wind turbine [38]
wind to reduce the captured power Consequently thecaptured power can remain at the nominal value byadjusting the blade angle of attack
(iii) Pitch control for the light and medium wind thepitch control can optimize the operation of the windturbine in the sense of maximizing rotor power Forthe strong wind that exceeds the nominal level pitchcontrol maintains a desired operating condition [26]The optimization operation by the pitch control canincrease rotor power up to 2 [42] This accuracyof the pitch angel is important but is not relevantfor the stability investigations of short-term stressTherefore the steady-state angle of inclination can beadjusted to zero when the incoming wind is below thenormal level For strongwind the steady-state angle isgreater than zero and increases with increasing windspeed Similar to the active stall control the windturbines with pitch control have adjustable blade inthe rotor hub When wind speed exceeds nominalvalue the pitch controller reduces the attack angleturning the blades (pitching) from wind graduallyThe difference pressure in front and in the rear of theblade is reduced The pitch control reacts faster thanactive stall control and provides better controllability
42 Linear Control Since the drive train is very rigid itstrain dynamics do not need to be included Furthermorethe drive system used in the turbine pitch is very fast Theactuator dynamics are not required Without consideringviscous damping the dynamic of the direct drive turbine isas follows [1 29 37]
119879aero minus 119879gen = 119868 120596 (18)
where 119879aero is the aerodynamic torque generated by the rotor119879gen is the generator torque 119868 is the inertia of the rotatingsystem and is the rate of change of rotor speed
Considering 119879gen as a constant in the power regulationregion the derivative of (18) is [1 29 37]
119879aero = 119868 (19)
The aerodynamic torque change depends on the change inwind speed the change in the pitch angle of the rotor bladesand also the change at the current operating point of theturbine For this representation of the turbine dynamics the
transfer function of the change rate of aerodynamic torque tothe rotor speed is a double integrator It is scaled by the inverseof the rotational inertiaThus this linear system is the controlmodel
The proportional integral derivative technique (PID) isthe most popular and powerful linear control because it isrobust with respect to uncertainties and it has a simple formPID control for the rotational speed error is [37]
119906 = 119870119901119890 (119905) + 119870
119894int
119905
0
119890 (120591) 119889120591 + 119870119889
119889119890 (119905)
119889119905
(20)
where 119890(119905) is the rotational speed error and 119870119901 119870119894 and 119870
119889
are the proportional integral and derivative gains of the PIDcontroller respectively
Wind turbine PID control works quite well for speedregulation in low winds and has oscillations in pitch controlof high winds [37] To realize linear PID control a traditionalapproach is to linearize the nonlinear turbine dynamics in aspecified operating point [43]The transfer function119866
119862(119904) for
the PID controller between the input rotational speed errorand the output pitch angle is [37]
119866119888(119904) =
Δ120573119888(119904)
Δ120596 (119904)
=
1198961198891199042
+ 119896119901119904 + 119896119894
119904
(21)
How to select the PID gains is not an easy job In [37]a systematic approach with a visualization of the potentialperformance is presented However it still relies on theexperience and the intuition of control engineers
In certain operating points a set of controllers cannow be determined using LQ control [44] To have a goodtracking performance for both DC tracking problems in eachintegrator the tracking error is included see Figure 11 Herethe controller gain119870 is calculated at each operating point forminimizing the cost 119869
119888of [37]
119869119888= int
infin
119905=0
119911(119905)119879
119876119911 (119905) + 119906(119905)119879
119877119906 (119905) 119889119905
119911 = [119876sh 119909120596
119909119876]
119879
119906 = [120573ref 119876119892ref]119879
(22)
where 120573ref is the pitch reference 120596119903is the velocity of the
rotor 119876119892is the generator torque 120596
119892is the output angular on
the high speed side and 119876sh is the torsion between the twoinertias [37]
It should be noted that with the approach of interpolatingcontroller gains a good behavior cannot be guaranteed interms of stability and performance for intermediate operatingconditions In practice however the method has shownvarious application areas [44] One way of overcoming thisproblem is to apply LPV technique such that the modelis provided in a time-varying parameter which is a priorunknown and measurable
43 Nonlinear Control Sliding mode control is a robustnonlinear feedback control technique It can be applied forthe wind turbine control [45 46] see Figure 12
Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Turbine120596gref
minus
minus+
+
120596gQg
x
K
x120596
xQ
intint
120573ref
Qgref
Qsh120592
Qgref
Figure 11 Block diagram of controller formulation [37]
TurbineSliding mode controller
Wind
Pref
minus+
120576p Tg
Pg
120596g
Figure 12 Sliding mode control for wind turbine [45]
The tracking error 120576119901is defined as 120576
119901= 119875ref minus 119875
119908 where
119875119908is the aerodynamic power (rotor power) defined in (1) and
(3)and 119875ref is the reference power The derivative of 120576119901is [45]
120576119901= ref minus 119879
119860119903minus
119879119860120596119903 (23)
The dynamic sliding mode controller is defined as follows[45]
119879119860=
(119861 + 120582)
120596119903
sgn (120576119901) (24)
wheresdot
119861= |120576119901| 120582 is the tip-speed-ratio defined in (2) and120596
119903is
the wind turbine speed (velocity of the rotor) defined in (3)
sgn (119904) =
1 if 119904 gt 0
minus1 if 119904 lt 0
(25)
The closed-loop system is [45]
120576119901= ref minus 119879
119860119903minus (119861 + 120582) sgn (120576
119901) (26)
Theuncertainty is defined as119889 = refminus119879119860119903 and it is boundedas |119889| lt 119861
1 1198611is a positive constant Then (26) is rewritten
as follows [45]
120576119901= minus (119861 + 120582) sgn (120576
119901) + 119889 (27)
A Lyapunov function is defined as follows [45]
119881 =
1
2
1205762
+
1
2
(119861 minus 1198611)2
(28)
It is not difficult to see that its time derivative satisfies [45]
le minus120582 |120576| (29)
By the LaSalle theorem it is concluded that the tracking errorconverges asymptotically to zero
Since the sliding mode control system provides dynamicinvariant property with uncertainties it has to increase gainswhen tracking error is not zero The main problem of thesliding mode control is the chattering To decrease thisbehavior the sign function can be approximated as sgn(120576
119901) asymp
120576119901(|120576119901|+1198860) 1198860is small positive constantThis prevents from
increased mechanical stress due to strong torque variationsAnother chattering reduction method is to use the boundarylayer119898 sgn(119904) around the switching surface as follows [45]
119898 sgn (119904) =
sgn (119904) if 119904 ge 120575
119904
120575
if 119904 = 120575
(30)
44 Intelligent Control Neural control for the wind turbineis shown in Figure 13 Here the adaptive controller has thelearning ability [50ndash53] The objective is to train the neuralnetwork so that the controller will allow the plant to producethe desired result [47] To accomplish this the neural networkmust be trained so that the input error 120576
119901= 119890(119905) = 119875ref minus119875
119908=
119909119889(119905)minus119909
119899(119905) produces the proper control parameter119879
119860= 119906(119905)
to be applied to the plant to produce the aerodynamic power119875119908= 119909119899(119905) [54]
Fuzzy control for the wind turbine is shown in Figure 14120576119901= Δ119876 = 119875ref minus 119875
119908= 119876lowast
minus 119876 is the tracking error 119875ref = 119876lowast
is the reference 119875119908= 119876 is the aerodynamic power and 119879
119860=
119881119889119903lowast is the control input Here each input is evaluated by the
triangular or trapezoidal membership functions [48 55ndash57]The degree of membership of the fuzzy sets is associated witheach input The defuzzification is obtained by averaging eachoutput membership function [58 59]
In [48] each inputoutput variable that is used in thecontroller design is expressed in fuzzy set using linguisticvariables Seven linguistic variable are used for LLP CII andthe flow change rate The rules are expressed by IF-THENrules The defuzzification uses the center gravity technique
45 Generalized Predictive Control Model predictive control(MPC) usually represents the behavior of complex dynamicsystems It is also applied to the wind turbines [60 61] Itappears in the form of generalized predictive control (GPC)[62] and bias estimation model (BEM) [49]
GPC uses the estimations of future output to calculatecurrent control [38] A discrete model of wind turbine isshown in Figure 15 It is a finite difference approximation ofthe double integrator model Here Δ
119901is the change in the
angle of the blade pitch Δ120592is the wind speed change and
120596 is the rotor speed The coefficients 119887 and 119888 are obtained bya recursive least squares filter
Thismodel can predict the rotor speedwith varying ratiosand wind speed The coefficients 119887 and c increase with thewind speed increasingThe GPCmethod can be summarizedas follows
The cost function 119869 is [49]
119869 = (119882 minus119882119863)119879
119876 (119882 minus119882119863) + 120590119906
119879
119906 (31)
10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
PlantPitchcontroller
Learningalgorithm
Parameterupdate signal
ObservedDesired
xn(t)
u(t)e(t)xd(t)minus+
Σsignal
signal
Figure 13 Neural network controller [47]
where 119876 is the weighting matrix119882119863is the desired response
vector which is known for all time from the desired rotorspeed and 120590 is the deciding factor that weights the use ofcontrol against error in the desired response For positivesemidefinite cost function 119876 the control law 119906 is [49]
119906 = (120590119868 + 119866119879
119876119866)
minus1
119866119879
119876 (119882119863minus 119865) (32)
To calculate the inverse119876 is chosen as a diagonal matrixTheabove can be written as follows [49]
119882 = 119866119906 + 119865 (33)
where
119882 = (
120596(119899 + 1)
120596 (119899 + 2)
Δ120596 (119899 + 1)
Δ120596 (119899 + 1)
)
119906 = (
Δ119906 (119899)
Δ119906 (119899 + 1))
119866 = (
0 0
119887 0
0 0
119887 0
)
119865 = (
2120596 (119899) + 120596 (119899 minus 1) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
2119865 (1) minus 119866120596 (119899) + 119888Δ120592 (119899)
Δ120596 (119899) + 119887Δ119901 (119899 + 1) + 119888Δ120592 (119899 + 1)
119865 (3) + 119888Δ120592 (119899)
)
(34)
The transient response of this method is not good becauseof the double integrator and short control horizon The termΔ120596 is added to provide derivative-type control to improve thetransient response
The desired change in the pitch for the current timestep is given by the first element of 119906 The GPC methodis able to adjust the control system as the coefficients varywith changing conditions However the change in control isnot the preferred change As wind speed and 119887 increase themethod utilizes the additional gain to obtain a more accuraterotor speed To enable the system to perform similarly for allwind speeds the deciding factor 120590 is scaled by 119887 120590 = 120590
0119887
where 1205900is a constant
BEM can estimate the unmodelled disturbances actingon the system with additional equations This method is
DefuzzificationRulebase
Vdr998400Qlowast
ldslowast
ΔQ
Q
minus+
Figure 14 The block diagram of reactive power fuzzy logic con-troller [48]
Zminus1
Zminus1
Zminus2
Zminus2
120596(n)b
c
Δp(n)
Δ(n)
minus
++
2
Figure 15 Wind turbine model [49]
investigated because the wind speed over the rotor diskcannot bemeasured exactly [38] Consequently the bias termestimation is useful for the effect of changes in wind speedacting on the turbine
BEM uses the same model as GPC see Figure 16 Herethe coefficients 119887 and 119888 are determined for 12ms wind speedand the average values of 119887
119872and 119888119872 The estimate of Δ
120592is
included in the control law to cancel the disturbance
5 Offshore Floating Wind Turbines
The growing demand for wind energy offshore installedin recent years has been motivated primarily by reducedspace for installation in the land and the great advantages tomention a few [63]
(i) better energy production(ii) reduced turbulence intensity(iii) higher capacity factor(iv) avoids size limits
Currently investigating this type of turbine is focused notonly on controlling wind energy production but also in threegroups namely the design [64 65] installation and electricalinfrastructure and maintenance [66] This is because thematerial from which the turbine should be constructed tobe resistant to salinity and big changes suffered from thesea climate secondly because there is no restriction on thedimensions of the turbine the installationmakes it expensiveand difficult because it is in the sea once installed theturbine in the sea faces another major challenge which isthe operation of the network generation this is done at longdistance including wiring substations and connecting to thenetwork Once designed installed and put into operationonly a challenge remains to cover which is maintenance thismaintenance is usually very expensive due to the conditionsunder which it is done in some cases in the depth of the seain other weather conditions [67]
Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
x(n + 1) = [1 01 1
] ]x(n) + [b c0 0
Δp(n)Δ(n)
))
120596(n) = [0 1] x(n)120596(n)
120596ref (n)
Δp(n)+
K
x(n)
Δ(n)
N
)(n) = [0 1 0] x(n)Δ(n)
)
) )[ x(n + 1)Δ(n + 1)
] =x(n)Δ(n)
+ Δp(n) + L [120596(n) minus (n)]1 0 cM1 1 00 0 1
[ ][ ]
[ ][ ]bM00
minuscMbM
Figure 16 BEM control system [38]
6 Conclusions
Green energy has opened an important branch and showsin the rise of technology The wind turbines and relatedtechniques environment structure and control methodol-ogy are paid more attention recently This paper presentsthe most common used wind turbine models which areclassified with respect to different objectives as are moreproduction energy safety of turbine connection to gridconsequently the wind turbine dimensions are increased andthe control methods are required to respond quickly andeffectively to the important task of the power generationThe previous fact results in high cost of the sensors as wellas the instability of the system therefore more complexidentification techniques are required to help the control
References
[1] S M Bolik Modelling and Analysis of Variable Speed WindTurbines with Induction Generator during Grid Fault [PhDthesis] Alborg University Denmark 2004
[2] P J Moriarty and S B Butterfield ldquoWind turbine modelingoverview for control engineersrdquo in Proceedings of the AmericanControl Conference (ACC rsquo09) pp 2090ndash2095 St Louis MoUSA June 2009
[3] O Anaya-Lara Wind Energy Generation Modelling and Con-trol John Wiley amp Sons New York NY USA 2009
[4] Q Hernandez-Escobedo F Manzano-Agugliaro and AZapata-Sierra ldquoThe wind power of Mexicordquo Renewable andSustainable Energy Reviews vol 14 no 9 pp 2830ndash2840 2010
[5] T Ackermann Wind Power in Power Systems John Wiley ampSons New York NY USA 2005
[6] J Aho A Buckspan J Laks et al ldquoA tutorial of wind turbinecontrol for supporting grid frequency through active powercontrolrdquo in Proceedings of the National Renewable Energy Lab-oratory (NREL) Control Conference pp 27ndash29 Golden ColoUSA 2012
[7] J D J Rubio-Avila A Ferreyra-Ramırez F B Santillanes-Posada M Salazar-Pereyra and G Deloera-Flores ldquoTopicsrelated with the wind turbinerdquo WSEAS Transactions on Com-puters vol 7 no 8 pp 1169ndash1178 2008
[8] J J Rubio M Figueroa J Pacheco and M Jimenez-LizarragaldquoObserver design based in the mathematical model of a windturbinerdquo International Journal of Innovative Computing Infor-mation and Control vol 7 no 12 pp 6711ndash6725 2011
[9] BWu Y Lang N Zargari and S Kouro Power Conversion andControl of Wind Energy Systems JohnWiley amp Sons New YorkNY USA 2011
[10] G Ofualagba and E U Ubeku ldquoWind energy conversionsystem-Wind turbine modelingrdquo in Proceedings of the IEEEPower and Energy Society General Meeting Conversion andDelivery of Electrical Energy in the 21st Century PES pp 1ndash8July 2008
[11] G Michalke and A D Hansen ldquoModelling and control ofvariable speed wind turbines for power system studiesrdquo WindEnergy vol 13 no 4 pp 307ndash322 2010
[12] F Zhang W E Leithead and O Anaya-Lara ldquoWind turbinecontrol design to enhance the fault ride-through capabilityrdquoin Proceedings of the IET Conference on Renewable PowerGeneration (RPG rsquo11) p P31 September 2011
[13] H-L Fu and W-C Chang ldquoWin turbine control monitersyestem simulation and validationrdquo in Proceedings of the Inter-national Symposium on Computer Communication Control andAutomation (3CArsquo 10) pp 6ndash9 May 2010
[14] I Pourfar H A Shayanfar H M Shanechi and A H Naghsh-bandy ldquoControlling PMSG-based wind generation by a locallyavailable signal to damp power system inter-area oscillationsrdquoEuropean Transaction on Electrical Power 2012
[15] F Wu X-P Zhang and P Ju ldquoModeling and control ofthe wind turbine with the direct drive permanent magnetgenerator integrated to power gridrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 57ndash60 Nanjuing ChinaApril 2008
12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
[16] M Andriollo M De Bortoli G Martinelli A Morini andA Tortella ldquoControl strategy of a wind turbine drive by anintegrated modelrdquoWind Energy vol 12 no 1 pp 33ndash49 2009
[17] J Zhao W Zhang Y He and J Hu ldquoModeling and controlof a wind-turbine-driven DFIG incorporating core saturationduring grid voltage dipsrdquo in Proceedings of the 11th InternationalConference on Electrical Machines and Systems (ICEMS rsquo08) pp2438ndash2442 October 2008
[18] A Petersson TThiringer LHarnefors andT Petru ldquoModelingand experimental verification of grid interaction of a DFIGwind turbinerdquo IEEE Transactions on Energy Conversion vol 20no 4 pp 878ndash886 2005
[19] G Quinonez-Varela and A Cruden ldquoModelling and validationof a squirrel cage induction generator wind turbine duringconnection to the local gridrdquo IET Generation Transmission andDistribution vol 2 no 2 pp 301ndash309 2008
[20] S K Salman B Badrzadeh and J Penman ldquoModelling windturbine-generators for fault ride-through studiesrdquo in Proceed-ings of the 39th International Universities Power EngineeringConference (UPEC rsquo04) pp 634ndash638 September 2004
[21] H-S Ko G-G Yoon N-H Kyung andW-P Hong ldquoModelingand control of DFIG-based variable-speed wind-turbinerdquo Elec-tric Power Systems Research vol 78 no 11 pp 1841ndash1849 2008
[22] L B Shi C Wang L Z Yao L M Wang and Y X NildquoAnalysis of impact of grid-connected wind power on smallsignal stabilityrdquoWind Energy vol 14 no 4 pp 517ndash537 2011
[23] Z Qiu K Zhou and Y Li ldquoModeling and control of dioderectifier fed PMSG based wind turbinerdquo in Proceedings of the4th International Conference on Electric Utility Deregulation andRestructuring and Power Technologies (DRPT rsquo11) pp 1384ndash1388July 2011
[24] L Peng Y Li and B Francois ldquoModeling and control ofdoubly fed induction generator wind turbines by using causalordering graph during voltage dipsrdquo in Proceedings of the 11thInternational Conference on Electrical Machines and Systems(ICEMS rsquo08) pp 2412ndash2417 October 2008
[25] Y He J Hu and R Zhao ldquoModeling and control of wind-turbine used DFIG under network fault conditionsrdquo in Proceed-ings of the 8th International Conference on Electrical Machinesand Systems (ICEMS rsquo05) pp 986ndash991 September 2005
[26] V Akhmatov ldquoModelling and ride-through capability of vari-able speed wind turbines with permanent magnet generatorsrdquoWind Energy vol 9 no 4 pp 313ndash326 2006
[27] S M Muyeen S Shishido M H Ali R Takahashi T Murataand J Tamura ldquoApplication of energy capacitor system to windpower generationrdquo Wind Energy vol 11 no 4 pp 335ndash3502008
[28] A B Cultura II and Z M Salameh ldquoModeling and simulationof a wind turbine-generator systemrdquo in Proceedings of the IEEEPES General Meeting The Electrification of Transportation andthe Grid of the Future pp 1ndash7 July 2011
[29] S MMuyeen J Tamura and TMurata Stability Augmentationof aGrid-ConnectedWind Farm Green Energy andTechnologySpringer New York NY USA 2009
[30] WHongbin andDMing ldquoModeling and control of distributionsystem with wind turbine generatorsrdquo in Proceedings of the 3rdInternational Conference on Deregulation and Restructuring andPower Technologies (DRPT rsquo08) pp 2498ndash2503 April 2008
[31] X Q Ma V Chopra S H H Zargarbashi and J AngelesldquoWind turbine control using a gearless epicyclic transmissionrdquoin Proceedings of the 1st International Conference on AppliedRobotics for the Power Industry (CARPI rsquo10) October 2010
[32] S Heier Grid Integration of Wind Energy Conversion SystemChichester UK John Wiley amp Sons 1998
[33] C Pournaras V Riziotis and A Kladas ldquoWind turbine con-trol strategy enabling mechanical stress reduction based ondynamic model including blade oscillation effectsrdquo in Proceed-ings of the 18th International Conference on Electrical Machines(ICEM rsquo08) pp 1ndash6 September 2008
[34] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[35] J G Stuart A D Wright and C P Butterfield ldquoWind turbinecontrol systems dynamyc model devel opment using systemidentification and the fast structural dynamics coderdquo in Pro-ceedings of the American Society of Mechanical Engineers windenergy symposium Reno Nev USA 1997
[36] A Rolan A Luna G Vazquez D Aguilar and G AzevedoldquoModeling of a variable speed wind turbine with a permanentmagnet synchronous generatorrdquo in Proceedings of the IEEEInternational Symposium on Industrial Electronics (IEEE ISIErsquo09) pp 734ndash739 July 2009
[37] B Malinga ldquoModeling and control of a wind turbine as adistributed resourcerdquo in Proceedings of the 35th SoutheasternSymposium on SystemTheory pp 108ndash112 2003
[38] K Pierce and L Jay ldquoWind turbine control system modelingcapabilitiesrdquo in Proceedings of the American Controls Confer-ence pp 24ndash26 Philadelphia Pa USA June1998
[39] I Munteanu N A Cutululis A I Bratcu and E CeangAOptimal Control of Wind Energy Systems Advances in IndustrialControl Springer New York NY USA 2008
[40] W E Holley ldquoWind turbine dynamics and controlmdashissues andchallengesrdquo in Proceedings of the American Control Conferencepp 3794ndash3795 June 2003
[41] G E Van Baars ldquoWind turbine control design and implemen-tation based on experimental modelsrdquo in Proceedings of the 31stIEEE Conference on Proceedings of the Decision and Control vol2 pp 2454ndash2459 1992
[42] M Yin G Li M Zhou and C Zhao ldquoModeling of thewind turbine with a permanent magnet synchronous generatorfor integrationrdquo in Proceedings of the IEEE Power EngineeringSociety General Meeting (PES rsquo07) pp 1ndash6 June 2007
[43] J Wang N Tse and Z Gao ldquoSynthesis on PI-based pitchcontroller of large wind turbines generatorrdquo Energy Conversionand Management vol 52 no 2 pp 1288ndash1294 2011
[44] K Z Oslashstergaard P Brath and J Stoustrup ldquoGain-scheduledlinear quadratic control of wind turbines operating at highwindspeedrdquo in Proceedings of the 16th IEEE International Conferenceon Control Applications (CCA rsquo07) pp 276ndash281 October 2007
[45] B Beltran T Ahmed-AliM EH Benbouzid andAHaddounldquoSliding mode power control of variable speed wind energyconversion systemsrdquo in Proceedings of the IEEE InternationalElectric Machines and Drives Conference (IEMDC rsquo07) pp 943ndash948 May 2007
[46] V I Utkin Sliding Modes in Control and Optimization Com-munications and Control Engineering Series Springer BerlinGermany 1992
[47] S Kelouwani andKAgbossou ldquoNonlinearmodel identificationof wind turbine with a neural networkrdquo IEEE Transactions onEnergy Conversion vol 19 no 3 pp 607ndash612 2004
Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
[48] T Ustuntas and A D Sahin ldquoWind turbine power curve esti-mation based on cluster center fuzzy logic modelingrdquo JournalofWind Engineering and Industrial Aerodynamics vol 96 no 5pp 611ndash620 2008
[49] D Castaignet N K Poulsen T Buhl and J J Wedel-HeinenldquoModel predictive control of trailing edge flaps on a wind tur-bine bladerdquo in Proceedings of the American Control Conference(ACC rsquo11) pp 4398ndash4403 July 2011
[50] L Fausett Fundamentals of Neural Networks ArchitecturesAlgorithms and Applications Prentice-Hall New York NYUSA 2009
[51] F L Luo and R Unbehaben Applied Neural Networks for SignalProcessing Cambridge University Press New York NY USA1997
[52] A S Yilmaz and Z Ozer ldquoPitch angle control in wind turbinesabove the rated wind speed by multi-layer perceptron andradial basis function neural networksrdquo Expert Systems withApplications vol 36 no 6 pp 9767ndash9775 2009
[53] X Yao X Su and L Tian ldquoWind turbine control strategy atlower wind velocity based on neural network PID controlrdquo inProceedings of the International Workshop on Intelligent Systemsand Applications (ISA rsquo09) May 2009
[54] H M Hasanien and S M Muyeen ldquoSpeed control of grid-connected switched reluctance generator driven by variablespeed wind turbine using adaptive neural network controllerrdquoElectric Power Systems Research vol 84 no 1 pp 206ndash213 2012
[55] L A Zadeh ldquoFuzzy logic computing with wordsrdquo IEEE Trans-actions on Fuzzy Systems vol 4 no 2 pp 103ndash111 1996
[56] R Bayindir I Colak E Kabalci and E Irmak ldquoThe fuzzylogic control of a multilevel converter in a variable speedwind turbinerdquo in Proceedings of the International Conference onMachine Learning and Applications (ICMLA rsquo09) pp 787ndash7790Miami Beach Fla USA 2009
[57] M Jafarian andAM Ranjbar ldquoFuzzymodeling techniques andartificial neural networks to estimate annual energy output of awind turbinerdquo Renewable Energy vol 35 no 9 pp 2008ndash20142010
[58] S Chiu ldquoFuzzy model identification based on cluster estima-tionrdquo Intelligent Fuzzy Systems vol 2 pp 267ndash278 1994
[59] H H Lee P Q Dzung L M Phuong L D Khoa and N HNhan ldquoA new fuzzy logic approach for control system of windturbine with doubly fed induction generatorrdquo in Proceedings ofthe International Forum on Strategic Technology (IFOST rsquo10) pp134ndash139 October 2010
[60] D Q Dang S Wu Y Wang and W Cai ldquoModel predictivecontrol for maximum power capture of variable speed windturbinesrdquo in Proceedings of the 9th International Power andEnergy Conference (IPEC rsquo10) pp 274ndash279 October 2010
[61] Y S Qudaih M Bernard Y Mitani and T H MohamedldquoModel predictive based load frequency control design inthe presence of DFIG wind turbinerdquo in Proceedings of the2nd International Conference on Electric Power and EnergyConversion Systems (EPECS rsquo11) November 2011
[62] L C Henriksen ldquoModel predictive control of a wind turbinerdquoTechnical University of Denmark Informatics and MathematicalModelling pp 7ndash38 2007
[63] E Hau ldquoOffshore wind energy utilisationrdquo Wind Turbines pp677ndash718 2013
[64] T Sebastian and M A Lackner ldquoDevelopment of a freevortex wake method code for offshore floating wind turbinesrdquoRenewable Energy vol 46 pp 269ndash275 2012
[65] T Sebastian and M A Lackner ldquoAnalysis of the induction andwake evolution of an offshore floating wind turbinerdquo Energiesvol 5 pp 968ndash1000 2012
[66] Z Hameed J Vatn and J Heggset ldquoChallenges in the reliabilityand maintainability data collection for offshore wind turbinesrdquoRenewable Energy vol 36 no 8 pp 2154ndash2165 2011
[67] I Erlich F Shewarega C Feltes F W Koch and J FortmannldquoOffshore wind power generation technologiesrdquo Proceedings ofthe IEEE vol 101 pp 891ndash905 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of