Embed Size (px)
Citation preview

Review + Announcements
2/22/08

Presentation scheduleFriday 4/25 (5 max) Tuesday 4/29 (5 max) 1. Miguel Jaller 8:03 1. Jayanth 8:032. Adrienne Peltz 8:20 2. Raghav 9;203. Olga Grisin 8:37 3. Rhyss 8:37 4. Dan Erceg 8:54 4. Tim *:545. Nick Suhr 9:11 5-6. Lindsey Garret and Mark Yuhas 9:116. Christos Boutsidis 9:28
Monday 4/28
4:00 7:00 Pizza includedLisa PakChristos BoutsidisDavid Doria.Zhi ZengCarlosVarunSamratMattAdarsh Ramsuhramonian
Be on time.Plan your presentation for 15 minutes.Strict schedule.Suggest putting presentation in Your public_html directory in rcs so you can click and go.
Monday night class is in Amos Eaton 214 4 to 7.
Other Dates
Project Papers due Friday (or in class Monday if you have a Friday
presentation)Final Tuesday 5/6 3 p.m. Eaton 214
Open book/note (no computers) Comprehensive. Labs fair game too.
Office hours Monday 5/5 10 to 12 (or email)
What did we learn?
Theme 1:
“There is nothing more practical than a good theory” - Kurt Lewin
Algorithm arise out of the optimality conditions.

What did we learn?
Theme 2:
To solve a harder problem, reduce it to an easier problem that you already know how to solve.

Fundamental Theoretical Ideas
Convex functions and setsConvex programsDifferentiabilityTaylor Series ApproximationsDescent Directions
Combining these with the ideas of feasible directions provides the basis for optimality conditions.

Convex Functions
A function f is (strictly) convex on a convex set S, if and only if for any x,yS,
f(x+(1- )y)(<) f(x)+ (1- )f(y) for all 0 1.
x y
f(y)
f(x)
λx+(1- )y
f(λx+(1- )y)

Convex Sets
A set S is convex if the line segment joining any two points in the set is also in the set, i.e., for any x,yS,
x+(1- )y S for all 0 1 }.
convex convexnot convex not convex not convex
Convex Programmin f(x) subject to xSwhere f and S are convex
Make optimization niceMany practical problems are convex problemUse convex program as subproblem for nonconvex programs

Theorem : Global Solution of convex program
If x* is a local minimizer of a convex programming problem, x* is also a global minimizer. Further more if the objective is strictly convex then x* is the unique global minimizer.
Proof:
contradiction x*
yf(y)<f(x*)
First Order Taylor Series Approximation
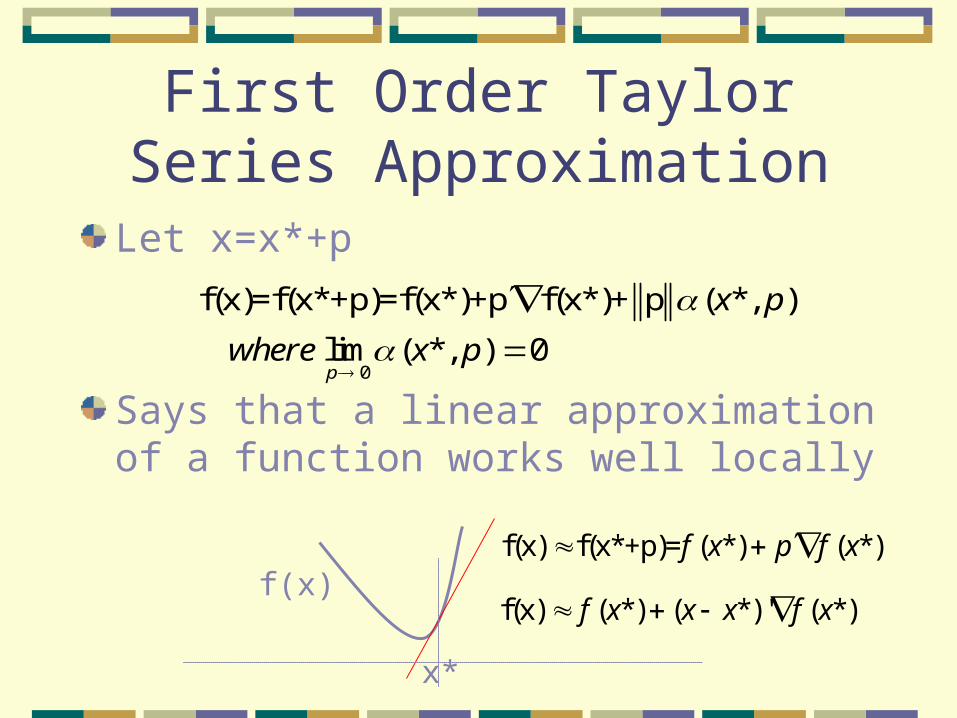
Let x=x*+p
Says that a linear approximation of a function works well locally
0
f(x)=f(x*+p)=f(x*)+p f(x*)+ p ( *, )
lim ( *, ) 0p
x p
where x p
f(x) f(x) f(x*+p)= ( *) ( *)f x p f x
x*
f(x) ( *) ( *) ' ( *)f x x x f x
Second Order Taylor Series Approximation
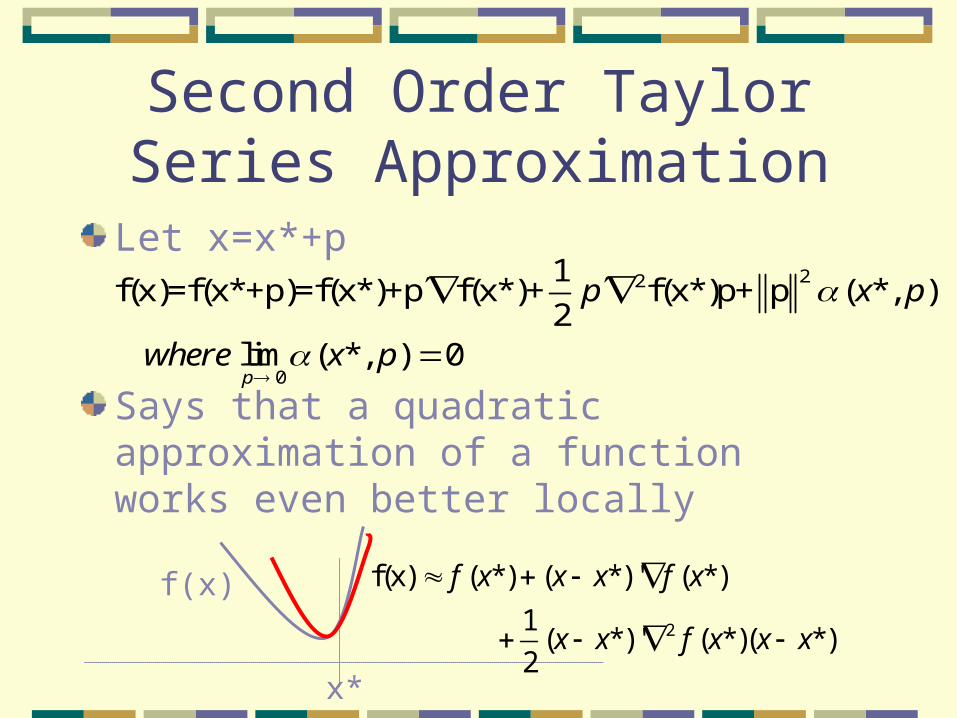
Let x=x*+p
Says that a quadratic approximation of a function works even better locally
22
0
1 f(x)=f(x*+p)=f(x*)+p f(x*)+ f(x*)p+ p ( *, )
2lim ( *, ) 0p
p x p
where x p
x*
f(x)2
f(x) ( *) ( *) ' ( *)
1( *) ' ( *)( *)
2
f x x x f x
x x f x x x
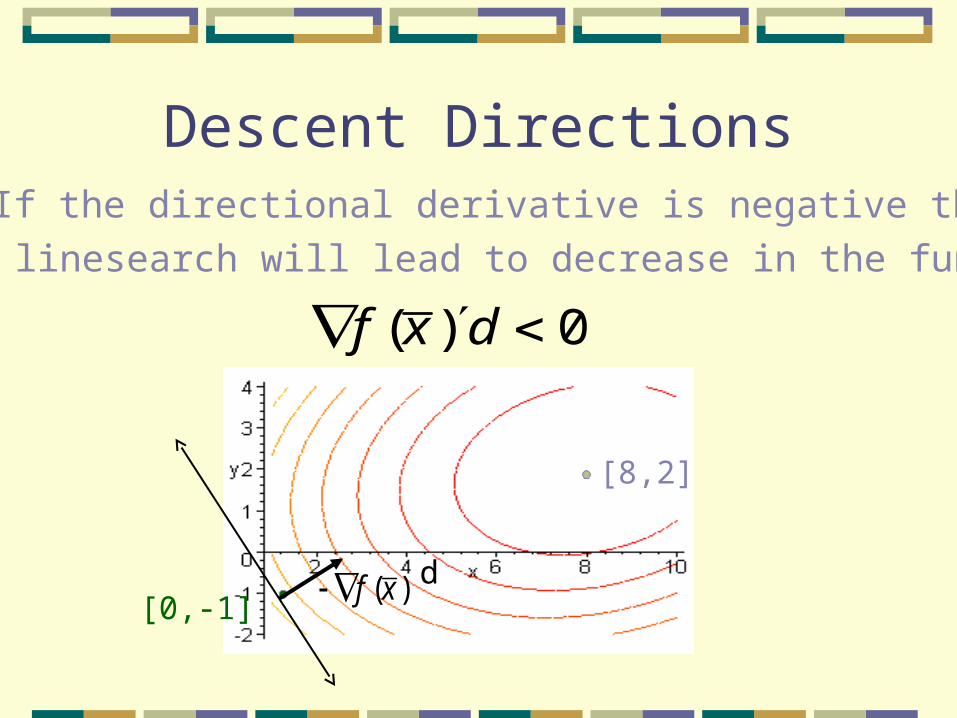
Descent Directions If the directional derivative is negative then
linesearch will lead to decrease in the function
[8,2]
[0,-1]d
( ) 0f x d
( )f x

First Order Necessary Conditions
Theorem: Let f be continuously differentiable.
If x* is a local minimizer of (1),
then
( *) 0f x

Second Order Sufficient Conditions
Theorem: Let f be twice continuously differentiable.
If and
then x* is a strict local minimizer of (1).
( *) 0f x
2 ( *) is positive definitef x

Second Order Necessary Conditions
Theorem: Let f be twice continuously differentiable.
If x* is a local minimizer of (1)
then
( *) 0f x
2 ( *) is positive semi definitef x

Optimality Conditions
First Order Necessary
Second Order Necessary
Second Order Sufficient
With convexity the necessary conditions become sufficient.

Easiest Problem Line Search =
1-D Optimization
Optimality conditions based on first and second derivatives
Golden section search
: [ , ]
min ( ) . . [ , ]
f a b R
f x s t x a b S
(1)

Sometimes can solve linesearch exactly
The exact stepsize can be found
min ( ) ( )
'( ) ' ( ) 0
g f x d
g d f x d

General Optimization algorithm
Specify some initial guess x0
For k = 0, 1, …… If xk is optimal then stopDetermine descent direction pk
Determine improved estimate of the solution: xk+1=xk+kpk
Last step is one-dimensional search problem called line search

Newton’s Method
Minimizing quadratic has closed form
1
2
1
( )
( ) 0
Minimum must satisfy, *
* (unique if Q is invertible)
g x x Qx b x
g x Qx b
Qx b
x Q b
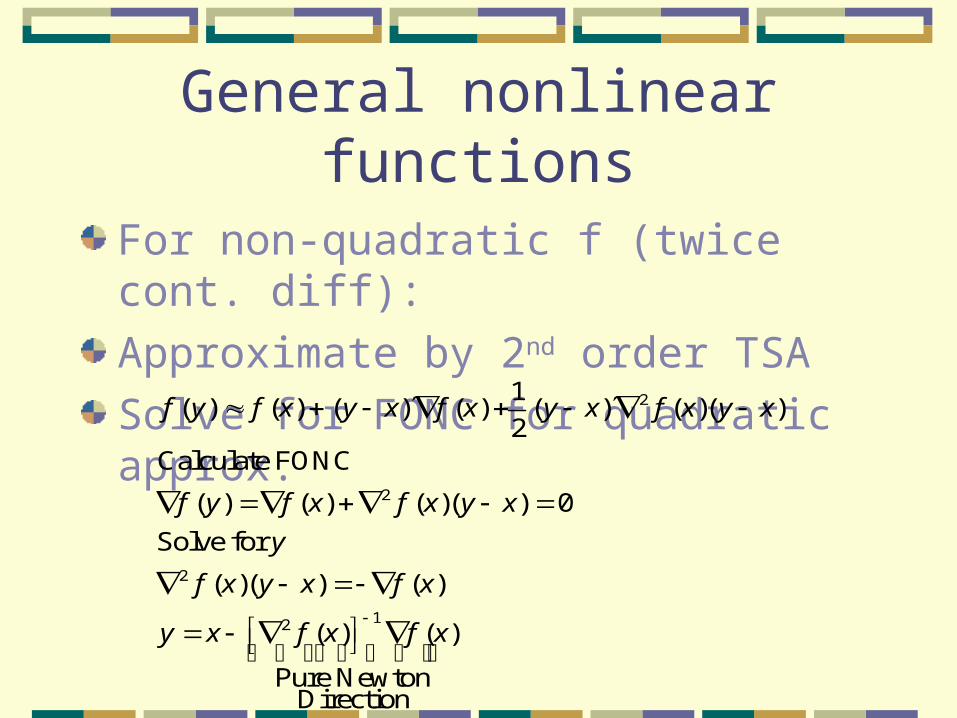
General nonlinear functions
For non-quadratic f (twice cont. diff):
Approximate by 2nd order TSA
Solve for FONC for quadratic approx.2
2
2
12
1( ) ( ) ( ) ( ) ( ) ( )( )
2Calculate FONC
( ) ( ) ( )( ) 0
Solve for
( )( ) ( )
( ) ( )
Pure Newton Direction
f y f x y x f x y x f x y x
f y f x f x y x
y
f x y x f x
y x f x f x

Basic Newton’s Algorithm
Start with x0
For k =1,…,K If xk is optimal then stopSolve:Xk+1=xk+p
2 ( ) ( )k kf x p f x

Final Newton’s Algorithm
Start with x0
For k =1,…,K If xk is optimal then stop Solve:
using modified cholesky
factorization Perform linesearch to determine
Xk+1=xk+kpk
2 ( ) 'kf x E LDL ' ( )k kLDL p f x
What are pros and cons?

Steepest Descent Algorithm
Start with x0
For k =1,…,K If xk is optimal then stop
Perform exact or backtracking linesearch to determine
xk+1=xk+kpk
( )k kp f x
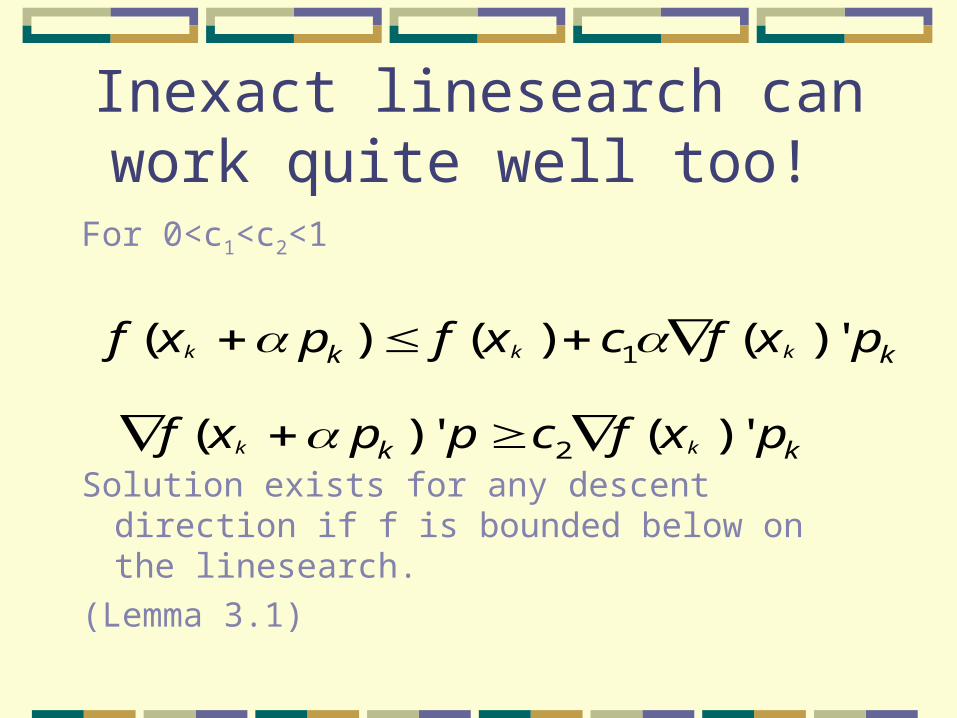
Inexact linesearch can work quite well too!
For 0<c1<c2<1
Solution exists for any descent direction if f is bounded below on the linesearch.
(Lemma 3.1)
1( ) ( ) ( ) 'k k kk kf x p f x c f x p
2( ) ' ( ) 'k kk kf x p p c f x p

Conditioning Important for gradient methods!
50(x-10)^2+y^2Cond num =50/1=50
Steepest DescentZIGZAGS!!!
Know Pros and Cons of each approach
Conjugate Gradient (CG)
Method for minimizing quadratic function
Low storage method
CG only stores vector information
CG superlinear convergence for nice problems or when properly scaled
Great for solving QP subproblems

Quasi Newton MethodsPros and Cons
Globally converges to a local min
always find descent direction
Superlinear convergence
Requires only first order information – approximates Hessian
More complicated than steepest descent
Requires sophisticated linear algebra
Have to watch out for numerical error

Quasi Newton MethodsPros and Cons
Globally converges to a local minSuperlinear convergence w/o computing HessianWorks great in practice. Widely used. More complicated than steepest descentBest implementations require sophisticated linear algebra, linesearch, dealing with curvature conditions. Have to watch out for numerical error.

Trust Region Methods
Alternative to line search methods
Optimize quadratic model of objective within the “trust region”
)(xf
ix1ix
k
kiik
pts
pBppxfxfp
..
'2
1)'()(minarg

Easiest Problem
Linear equality constraints
min ( )
. . ,
n
m n m
f x f R
s t Ax b A R b R

Lemma 14.1 Necessary Conditions (Nash + Sofer)
If x* is a local min of f over {x|Ax=b}, and Z is a null matrix
Or equivalently use KKT Conditions
2
' ( *) 0
' ( *) . . .
Z f x
and Z f x Z is p s d
2
( *) ' 0
*
' ( *) . . .
f x Ahas a solution
Ax b
Z f x Z is p s d
Other conditionsGeneralize similarly
Handy ways to compute Null Space
Variable Reduction Method
Orthogonal Projection Matrix
QR factorization (best numerically)
Z=Null(A) in matlab

Next Easiest Problem
Linear equality constraints
Constraints form a polyhedron
min ( )
. . ,
n
m n m
f x f R
s t Ax b A R b R

Polyhedron Ax>=b
( *) *
*
( * ) 0
0
Ti i
i
i i i
f x A a
Ax b
A x b
a1x = b1
*)(xf
a1
Inequality Case
a4x = b4
a3x = b3
a5x = b5
a2x =b5
a2
Inequality problem
Nonnegative Multipliers imply gradient points to the greater thanSide of the constraint.
x*
* min ( )
. .
1...i i
x f x
s t a x b
i d
Inequality FONC:

Second Order Sufficient Conditions for Linear
InequalitiesIf (x*,*) satisfies
2
* Primal feasibility
( *) ' * Dual feasibility
* 0
*'( * ) 0 Complementarity
and SOSC ' ( *) . .
Then x* is a strict local minimizer
Ax b
f x A
Ax b
Z f x Z is p d

Sufficient Conditions for Linear Inequalities
where Z+ is a basis matrix for Null(A
+) and A + corresponds to nondegenerate active constraints)
i.e.+
*j
A
{ | * , 0 }
J
j j
A
j A x b
General Constraints
min ( )
. . ( ) 0
( ) 0i
i
f x
s t g x i E
g x i I
Careful : Sufficient conditions are the same as before Necessary conditions have extra constraint qualification to make sure Lagrangian multipliers exist!

Necessary Conditions General
If x* satisfies LICQ and is a local min of f over {x|g(x)>=0,h(x)=0}, * *
* *
'
2
there exists 0,
0 ( *, *, *) ( *) ( *) ( *)
( *) 0 , ( *) 0
* ( *) 0
' ( *) . .
is the null space matrix for ( *) (active
constraints)
I E
x I E i i i ii i
xx
L x f x g x h x
g x h x
g x
and Z L x Z is p s d
where Z A x

Algorithms build on prior Approaches
Linear Equality Constrained: Convert to unconstrained
and solvemin ( )f x
min ( )
. .
f x
s t Ax b
Different ways to representNull space produceAlgorithms in practice

Prior Approaches (cont)
Linear Inequality Constrained: Identify active constraints
Solve equality constrained
subproblems
Nonlinear Inequality Constrained: Linearize constraints Solve subproblems
min ( )
. .
f x
s t Ax b
min ( )
. . ( ) 0
f x
s t g x
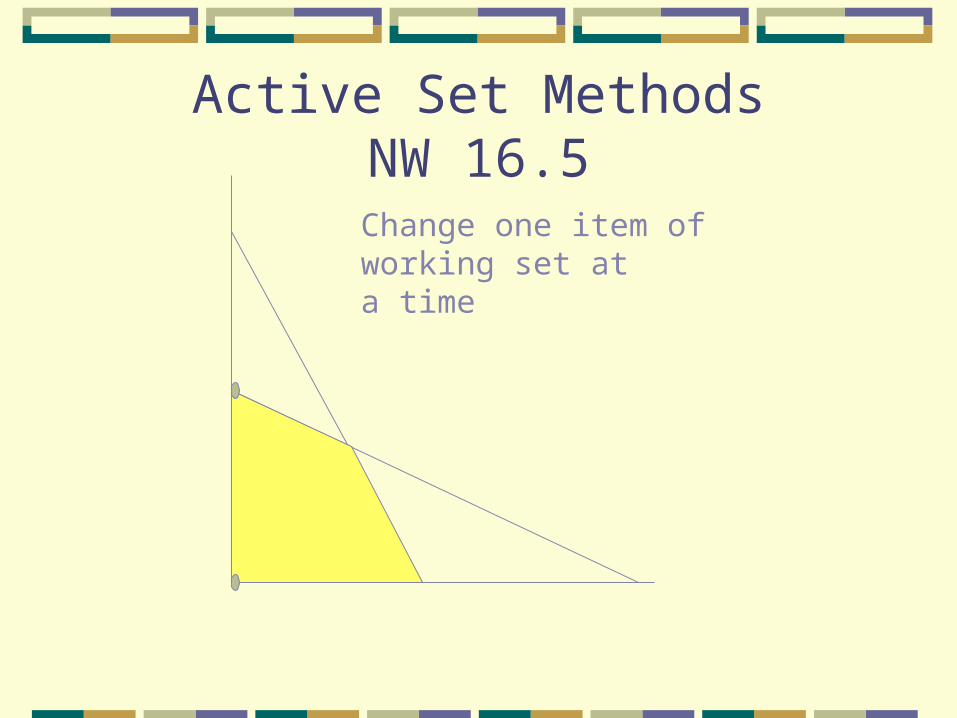
Change one item of working set at a time
Active Set MethodsNW 16.5
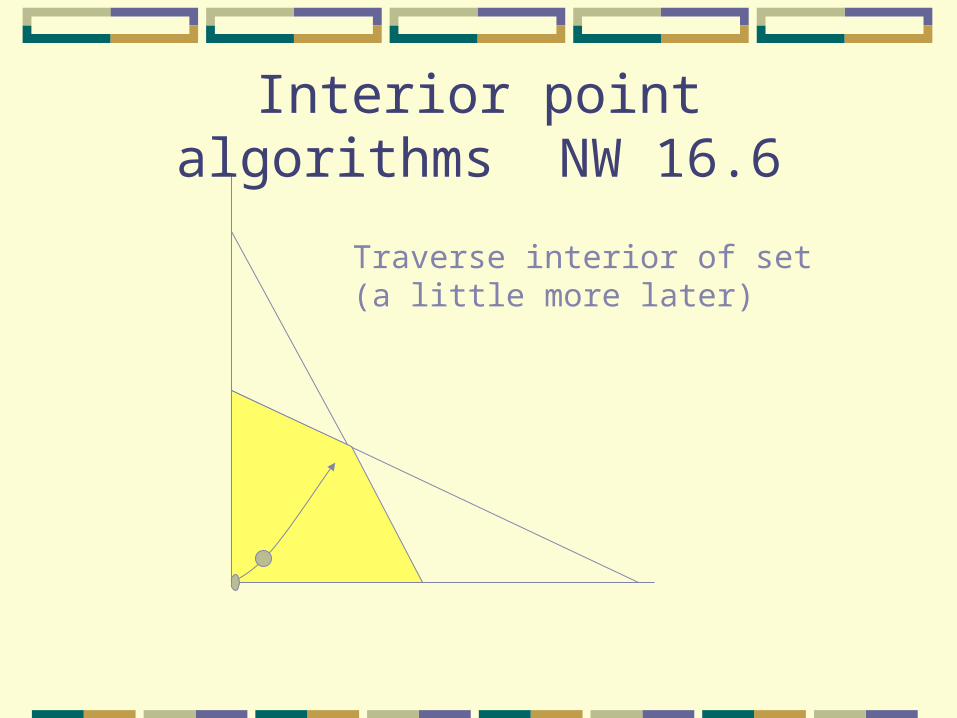
Traverse interior of set (a little more later)
Interior point algorithms NW 16.6
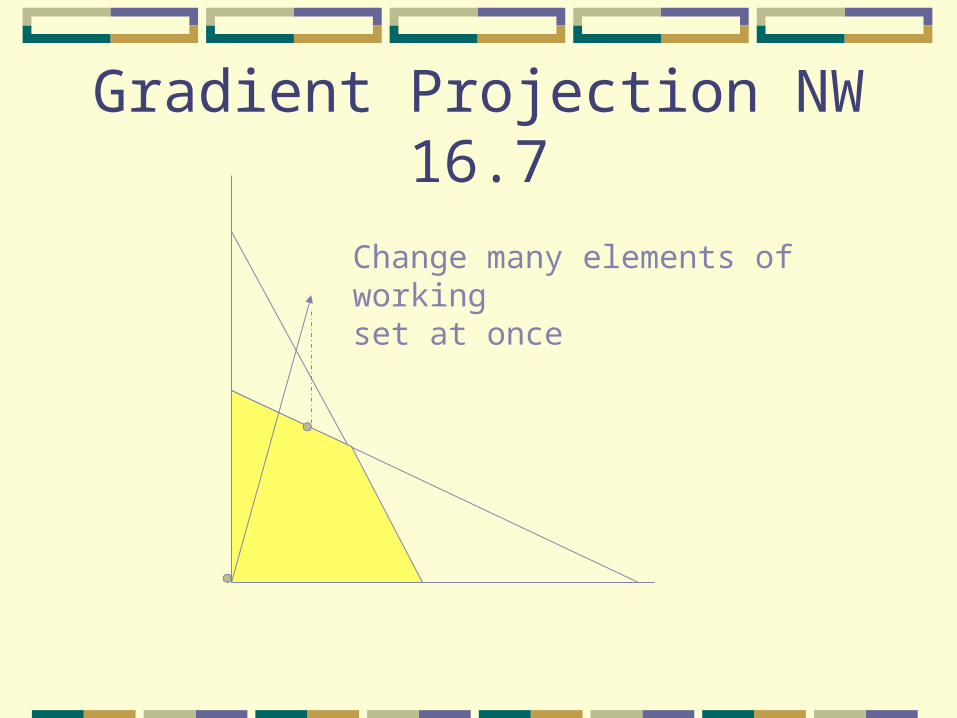
Change many elements of working set at once
Gradient Projection NW 16.7

Generic inexact penalty problem
min ( )
( ) . . ( ) 0
( ) 0i
i
f x
NLP s t g x i E
g x i I
2 2( , ) ( ) ( ( )) (( ( )) )i ii E i I
P x f x g x g x
From
To
What are penalty problems and why do we use them?Difference between exact and inexact penalties.
Augmented Lagrangian
Consider min f(x) s.t h(x)=0
Start with L(x, )=f(x)-’h(x)
Add penalty
L(x, ,c)=f(x)-’h(x)+μ/2||h(x)||2
The penalty helps insure that the point is feasible.
Why do we like these? How do they work in practice?

Sequential Quadratic Programming (SQP)
Basic Idea:QP with constraints are easy. For any
guess of active constraints, just have to solve system of equations.
So why not solve general problem as a series of constrained QPs.
Which QP should be used?
Trust Region Works Great
We only trust approximation locally so limit step to this region by adding constraint to QP
21
2min ' ( , ) ' ( , )
. . ( ) ' ( ) 0
xx k k x x kp
x x k
k
p L x p p L x
p
s t g x p g x
Trust region
No stepsize needed!
Advanced topics
Duality Theory – Can choose to solve primal or dual
problem. Dual is always nice. But there may be a “duality gap” if overall
problem is not nice. Nonsmooth optimization
Can do the whole thing again on the basis of subgradients instead of gradients.

Subgradient
Generalization of the gradient
Definition
at x. oft subgradien a is
x)-(yg' f(x)f(y)
such that g vector a
function.convex a be:Let
f
R
RRfn
n
Hinge loss
0 1f(y) f(x) g'(y-x)







![Home Page []0.7000 max 35 min 65 max 85 max 125 max 1 50 max I .5 max I max NO 1 STRIP 75 max 25 min 0.03 max 15 max 40 max Specific Gravity @ 150C Distillation:](https://img.pdfslide.us/doc/110x75/5f201a8f5d3b4e45a5210259/home-page-07000-max-35-min-65-max-85-max-125-max-1-50-max-i-5-max-i-max-no.jpg)