Embed Size (px)
DESCRIPTION
Review. The Critical Section problem Peterson’s Algorithm Implementing Atomicity Busy waiting Blocking. Outline. Semaphores what they are how they are used Monitors what they are how they are used. What’s wrong with this picture?. Our solutions to CS have two unappealing features: - PowerPoint PPT Presentation
Citation preview
Review
• The Critical Section problem
• Peterson’s Algorithm
• Implementing Atomicity
• Busy waiting
• Blocking

Outline
• Semaphores– what they are– how they are used
• Monitors– what they are– how they are used

What’s wrong with this picture?
Our solutions to CS have two unappealing features:– They are mistifying and unclear– They use busy waiting

Semaphores
A semaphore consists of:
• A variable s
• A thread set T
• A function P (Passeren; wait)
• A function V (Vrijgeven; signal)
syntax example: Semaphore s(5);
Semaphore Operations
Initialization(val)
{
s = val ;
T =

P(s)
s--;if(s < 0){
add caller thread to T;block;
}This code executes atomically.

V(s)
s++;if(s 0){
Remove a thread t from T;Unblock(t);
}This code executes atomically.

Mutual exclusion with semaphores
Thread T0
while (!terminate) {<entry0>
CS<exit0>
NCS0
}
Thread T1
while (!terminate) {<entry1>
CS<exit1>
NCS1
}
P(s); P(s);
V(s); V(s);
init: s = 1

Questions, Questions...
• What if we have n threads instead of 2?
• What if we want to allow at most k threads in the CS?
Binary Semaphore
Two types:
• Counting semaphores– s takes any values
• Binary semaphores– s takes only 0 or 1

Binary Semaphores
P(s)
if (s == 0){
Add caller thread to T;Block;
}else
s--;
V(s)
if (T != ){ Remove a thread t from T; Unblock(t);}else if (s == 0)
s = 1;

Important properties of Semaphores -I
• Semaphores are non-negative integers• The only operations you can use to change
the value of a semaphore are P() and V() (except for the initial setup)
• Semaphores have two uses– Mutual exclusion: you know all about it– Synchronization: how do we make sure that T1
completes execution before T2 starts?

Important Propertiesof Semaphores- II
• We assume that a semaphore is fair:No thread t that is blocked because of a P(s) operation remains blocked if s
is V’d infinitely often
Does this guarantee bounded waiting?
• In practice, FIFO is mostly used, transforming the set into a queue.
• V(s) never blocks.
• Binary semaphores are as expressive as general semaphores (given one can implement the other)– But they are different:
{s = 0} V(s) V(s) P(s) P(s) VS
{s = 0} Vb(s) Vb(s) Pb(s) Pb(s)
Classic Problems: Producer-Consumer I
• Producer adds items to a shared buffer• Consumer takes them out• Buffer avoids producers and consumers to
proceed in lock step• Buffer is finiteExamples:
– cpp|cc|as– coke machine– ready queue in a multithreaded multiprocessor– ….

Producer Consumer II
• Two types of constraint:– Mutual Exclusion
• Only one thread can manipulate the buffer at any one time
– Condition Synchronization• Consumer must wait if buffer is empty
• Producer must wait if buffer is full
• Are these safety or liveness properties?
Producer Consumer III
• Use a separate semaphore for each constraintSemaphore mutex; // protects the shared bufferSemaphore fullSlots; // counts full slots: if 0, no
// cokeSemaphore emptySlots; // counts empty slots: if
0, // nowhere to put more coke
Producer Consumer IV
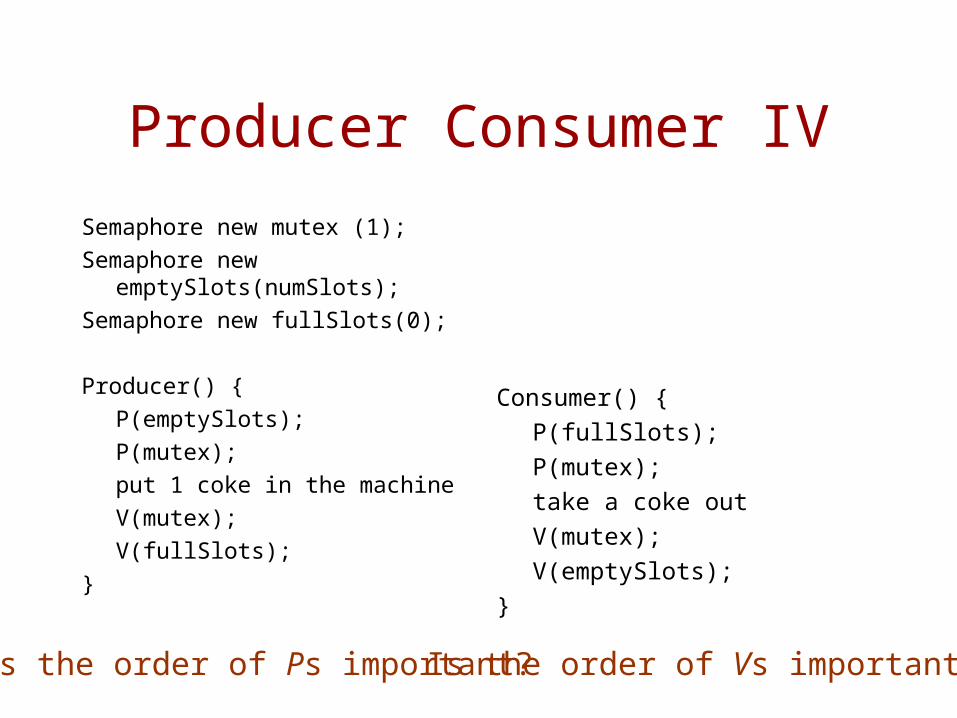
Semaphore new mutex (1);Semaphore new
emptySlots(numSlots);Semaphore new fullSlots(0);
Producer() {P(emptySlots);P(mutex);put 1 coke in the machineV(mutex);V(fullSlots);
}
Consumer() {P(fullSlots);P(mutex);take a coke outV(mutex);V(emptySlots);
}
Is the order of Ps important? Is the order of Vs important?

Beyond Semaphores
• Semaphores huge step forward (immagine having to do producer consumer with Peterson’s algorithm…)
• BUT…Semaphores are used both for mutex and condition synchronization– hard to read code
– hard to get code right
Monitors (late 60’s, early 70’s)
• A programming language construct, much like what we call today objects
• Consists of:– General purpose variables
– Methods
– Initialization code (constructor)
– Condition variables
• Can implement a monitor-like style of programming without without the language construct, using a combination of locks and condition variables

Locks
A lock provides mutual exclusion to shared data:Lock::Acquire() – wait until lock is free, then grab itLock::Release() – unlock; wake up anyone waiting in
Acquire
Rules:– Always acquire before accessing a shared data structure– Always release after finishing with shared data
structure– Lock is initially free

Example: Producer Consumer
addToBuff() {lock.Acquire(); // lock before using shared dataput item on buffer, if there is spacelock.Release();
}removeFromBuff() {
lock.Acquire(); // lock before using shared dataif something on buffer, remove itlock.Release();return item;
}

Houston, we have a problem…
• How do we change removeFromBuff so that it check if there is something in the buffer before trying to remove it?
• Logically, want to suspend thread inside the critical section
• What is the problem?
• Solution: suspend and atomically release lock
Condition Variables
A queue of threads waiting for something inside the critical section (why does it not violate safety?)
Condition variables have two operations:– Wait()
• Calling thread blocks, releases lock (gives up monitor)
• Wait on a queue until someone signals variable
– Signal()• Unblock someone who was waiting on the variable
– Broadcast()• Unblock all waiting on the variable
Producer Consumer, againaddToBuff() {
lock.Acquire(); // lock before using shared dataput item on buffercondition.signal();lock.Release();
}removeFromBuff() {
lock.Acquire(); // lock before using shared datawhile nothing on buffer {
condition.wait(&lock)}remove item from bufferlock.Release();return item;
}

A dilemma
• What happens to a thread that signals on a condition variable while in the middle of a critical section?

Hoare Monitors
• Assume thread Q waiting on condition x
• Assume thread P is in the monitor
• Assume thread P calls x.signal
• P gives up monitor, P blocks!
• Q takes over monitor, runs
• Q finishes, gives up monitor
• P takes over monitor, resumes
Example: Hoare Monitors
fn1(…)
…
x.wait // T1 blocks
// T1 resumes
// T1 finishes
fn4(…)
…
x.signal // T2 blocks
// T2 resumes
Per Brinch Hansen’s Monitors
• Assume thread Q waiting on condition x
• Assume thread P is in the monitor
• Assume thread P calls x.signal
• P continues, finishes
• Q takes over monitor, runs
• Q finishes, gives up monitor
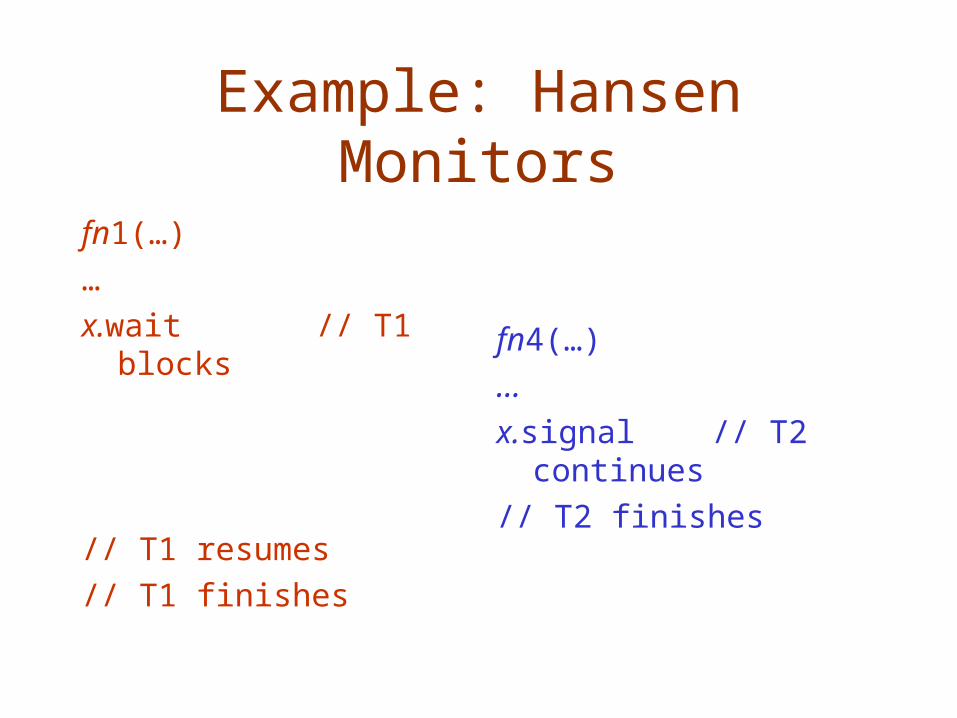
Example: Hansen Monitors
fn1(…)
…
x.wait // T1 blocks
// T1 resumes
// T1 finishes
fn4(…)
…
x.signal // T2 continues
// T2 finishes

Tradeoff
Hoare• Awkward in programming
• Cleaner, good for mathematical proofs
• Main advantage: when a condition variable is signalled, condition does not change
• Used bymost textbooks
Hansen• Easier to program
• Can lead to synchronization bugs
• Used by most systems
Classic Problems 2:Readers-Writers
• Motivation:shared database (bank, seat reservation system)
• Two classes of users:– readers (never modify database)– writers (read and modify database)
• Want to maximize concurrency– at most one writer in database– if no writer, any number of readers in database

Towards a solution
State variables:– ar --- active readers (readers in CS)
– aw --- active writers (writers in CS)
Condition variables:– oktoread (readers can enter critical section)
– oktowrite (writer can enter critical section)
Safetyar ≥ 0 aw ≥ 0 (aw = 0 (aw = 1 ar = 0))

Structure of the solution
Database::read()wait until no writersaccess databaseif no readers in database, let writer in
Database::write()wait until no readers or writersaccess databasewake up waiting readers and writers
Use procedures startRead, doneRead, startWrite, doneWrite
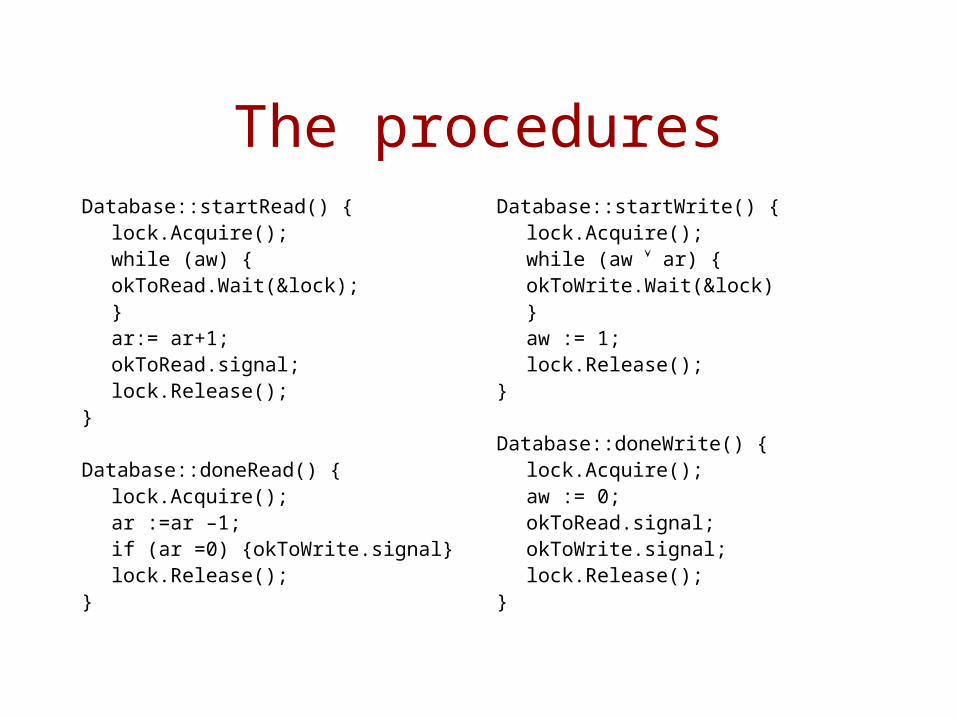
The proceduresDatabase::startRead() {
lock.Acquire();while (aw) {
okToRead.Wait(&lock);}ar:= ar+1;okToRead.signal;lock.Release();
}
Database::doneRead() {lock.Acquire();ar :=ar –1;if (ar =0) {okToWrite.signal}lock.Release();
}
Database::startWrite() {lock.Acquire();while (aw ar) {okToWrite.Wait(&lock)}aw := 1;lock.Release();
}
Database::doneWrite() {lock.Acquire();aw := 0;okToRead.signal;okToWrite.signal;lock.Release();
}

Semaphores and Monitors - I
Can we build monitors using semaphores?Try 1:
Wait() {P(s)} Signal() {V(s)}
Try 2:Wait(Lock *lock) { Signal() {
lock.Release(); V(s);P(s); }lock.Acquire();
}

Semaphores and Monitors-II
Try 3:Signal() {
if semaphore queue is not empty {V(s)}}
REMEMBER: – If a thread signals on a condition on which no thread is
waiting, the result is a no-op.
– If a thread executes a V on a semaphore on which no thread is waiting, the semaphore is incremented!
A few matters of style
• Always do things the same way
• Always use monitors (condition variables plus locks)
• Always hold lock when operating on a condition variable
• Always grab lock at the beginning of a procedure and release it before return
• Always use while (not if) to check for the value of a condition variable
• (Almost) never use sleep to synchronize

Example: Java
• Each object has a monitor
• User can specify the keyword “synchronized” in front of methods that must execute with mutual exclusion
• Use Hansen monitors
• No individually named condition variables (just one anonymous condition variable)– wait()
– notify()
– notifyAll()