Embed Size (px)
Citation preview
ISFFMT 2013 / Munich / Germany/ May 29-31, 2013
RESULTS OF PRISMA / FFIORD EXTENDED MISSION AND APPLICABILITY TO FUTURE MISSIONS
M. Delpech1, J.C.Berges1, F.Malbet2, T. Karlsson3
1 CNES, 2 IPAG, 3 OHB-Sweden
2
SFFMT 2013 / Munich / Germany / May 29-31, 2013
Content
■ Context & Motivation■ PRISMA overview■ Experiments description
Vision based RDVMetrology transition & Vision based based proximity controlµ-NEAT pathfinder
■ Applicability to ADR scenario■ Conclusion
3
SFFMT 2013 / Munich / Germany / May 29-31, 2013
Context and motivation
■ PRISMA nominal mission enabled numerous contributions in formation flying and autonomous rendezvous (validation of sensors, algorithms, operations)
Formation flying• GPS navigation and all GPS based tasks (DLR, OHB-S)• RF navigation and all RF based tasks (CNES with the FFIORD experiment)
Autonomous RDV• Vision based RDV with a non cooperative object (OHB-S)• Proximity operations in a cooperative context (OHB-S)
All experiment objectives were fulfilled
■ PRISMA extended mission started in August 2011 with opportunities of new experiments(including new software)
■ CNES responded positively to demonstrate capabilities required in future missionsVision based RDV (RDV)Metrology transition (FF, RDV)Re-pointing manoeuvers (FF, RDV)push the PRISMA system to its limits
4
SFFMT 2013 / Munich / Germany / May 29-31, 2013
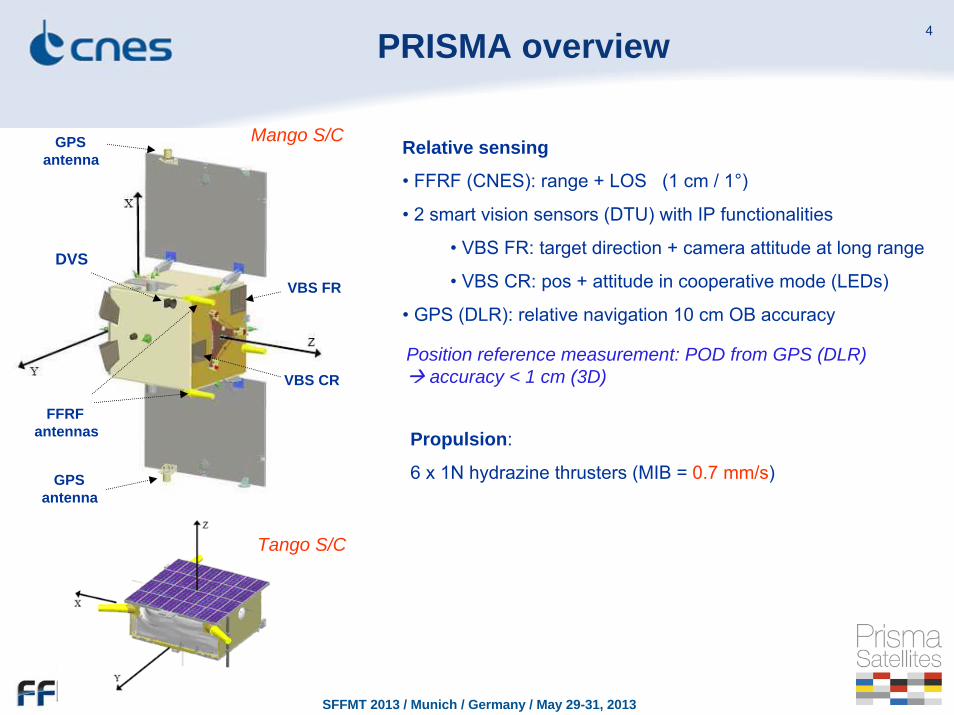
PRISMA overview
Position reference measurement: POD from GPS (DLR) accuracy < 1 cm (3D)
Tango S/C
Propulsion:
6 x 1N hydrazine thrusters (MIB = 0.7 mm/s)
DVS
VBS FR
VBS CR
Mango S/C
FFRFantennas
GPSantenna
GPSantenna
Relative sensing
• FFRF (CNES): range + LOS (1 cm / 1°)
• 2 smart vision sensors (DTU) with IP functionalities
• VBS FR: target direction + camera attitude at long range
• VBS CR: pos + attitude in cooperative mode (LEDs)
• GPS (DLR): relative navigation 10 cm OB accuracy
5
SFFMT 2013 / Munich / Germany / May 29-31, 2013
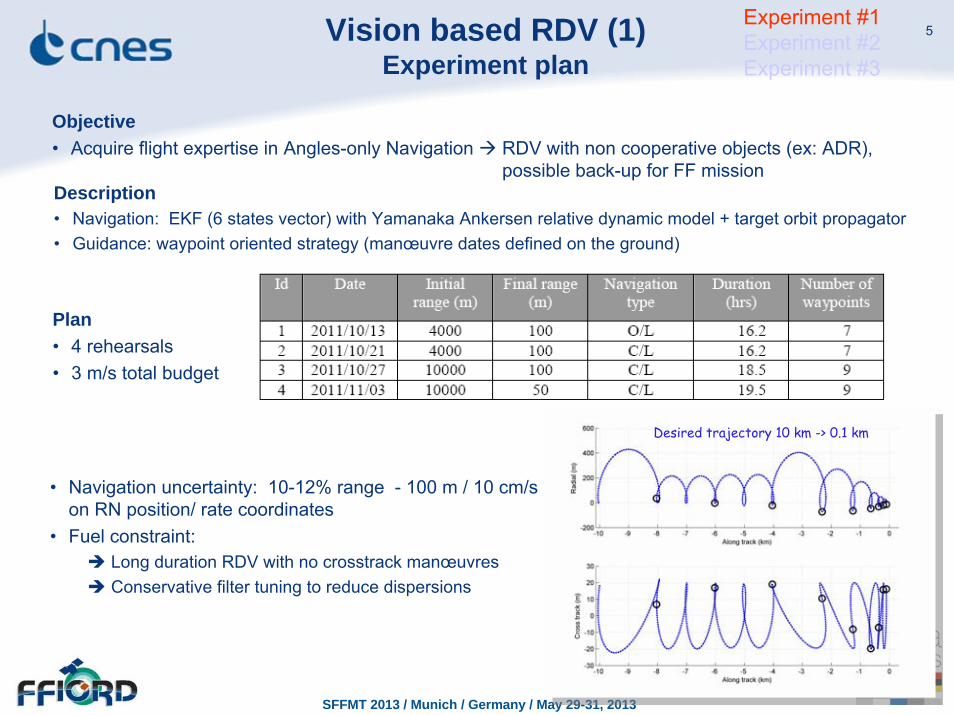
Vision based RDV (1)Experiment plan
Objective• Acquire flight expertise in Angles-only Navigation RDV with non cooperative objects (ex: ADR),
possible back-up for FF missionDescription• Navigation: EKF (6 states vector) with Yamanaka Ankersen relative dynamic model + target orbit propagator• Guidance: waypoint oriented strategy (manœuvre dates defined on the ground)
• Navigation uncertainty: 10-12% range - 100 m / 10 cm/s on RN position/ rate coordinates
• Fuel constraint:Long duration RDV with no crosstrack manœuvresConservative filter tuning to reduce dispersions
Desired trajectory 10 km -> 0.1 km
Plan• 4 rehearsals• 3 m/s total budget
Experiment #1Experiment #2Experiment #3
6
SFFMT 2013 / Munich / Germany / May 29-31, 2013
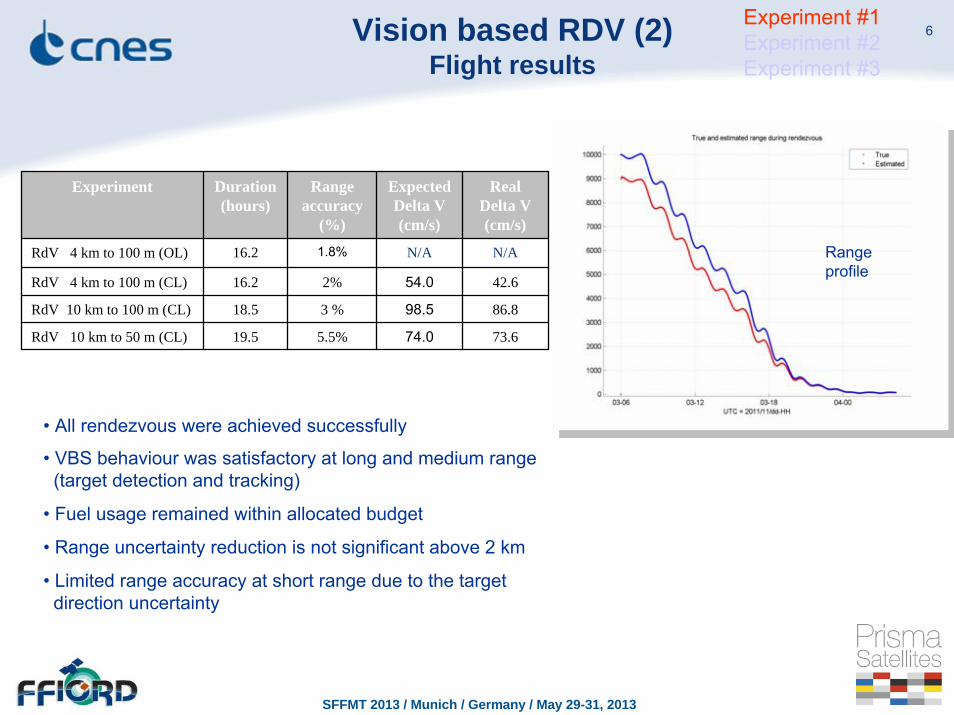
Vision based RDV (2)Flight results
Experiment Duration (hours)
Range accuracy
(%)
Expected Delta V (cm/s)
Real Delta V (cm/s)
RdV 4 km to 100 m (OL) 16.2 1.8% N/A N/A
RdV 4 km to 100 m (CL) 16.2 2% 54.0 42.6
RdV 10 km to 100 m (CL) 18.5 3 % 98.5 86.8
RdV 10 km to 50 m (CL) 19.5 5.5% 74.0 73.6
• All rendezvous were achieved successfully
• VBS behaviour was satisfactory at long and medium range(target detection and tracking)
• Fuel usage remained within allocated budget
• Range uncertainty reduction is not significant above 2 km
• Limited range accuracy at short range due to the targetdirection uncertainty
Range profile
Experiment #1Experiment #2Experiment #3
7
SFFMT 2013 / Munich / Germany / May 29-31, 2013
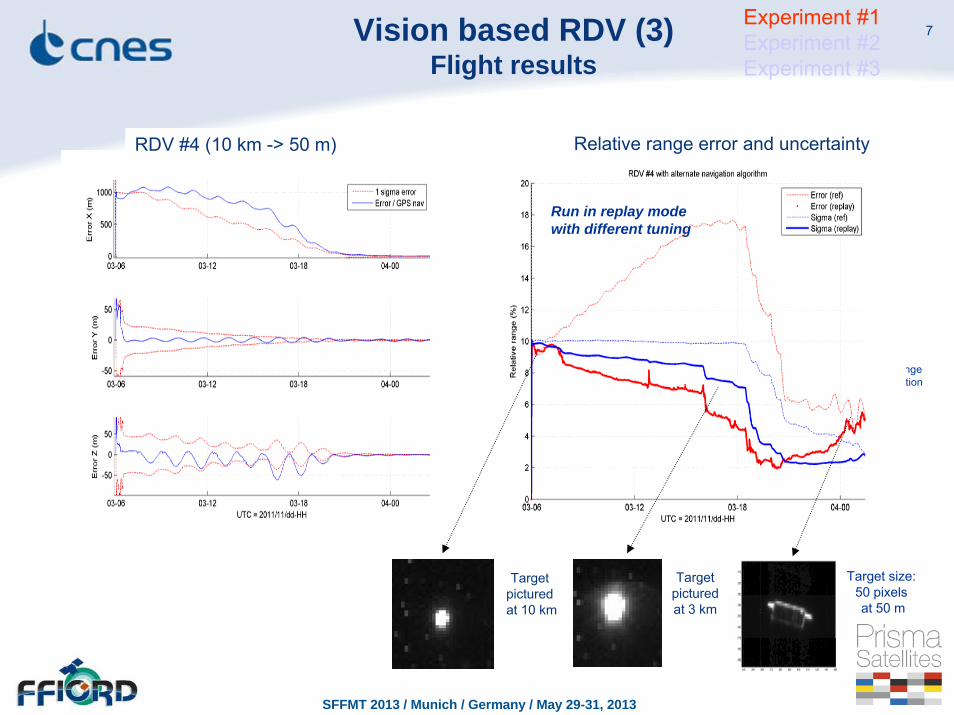
Vision based RDV (3)Flight results
Relative range error and uncertaintyRDV #4 (10 km -> 50 m)
Short rangedegradation
LVLH frameinitial attitude
error
Experiment #1Experiment #2Experiment #3
Initial attitude error of the LOF
Run in replay mode with different tuning
Target picturedat 10 km
Target picturedat 3 km
Target size:50 pixelsat 50 m
8
SFFMT 2013 / Munich / Germany / May 29-31, 2013
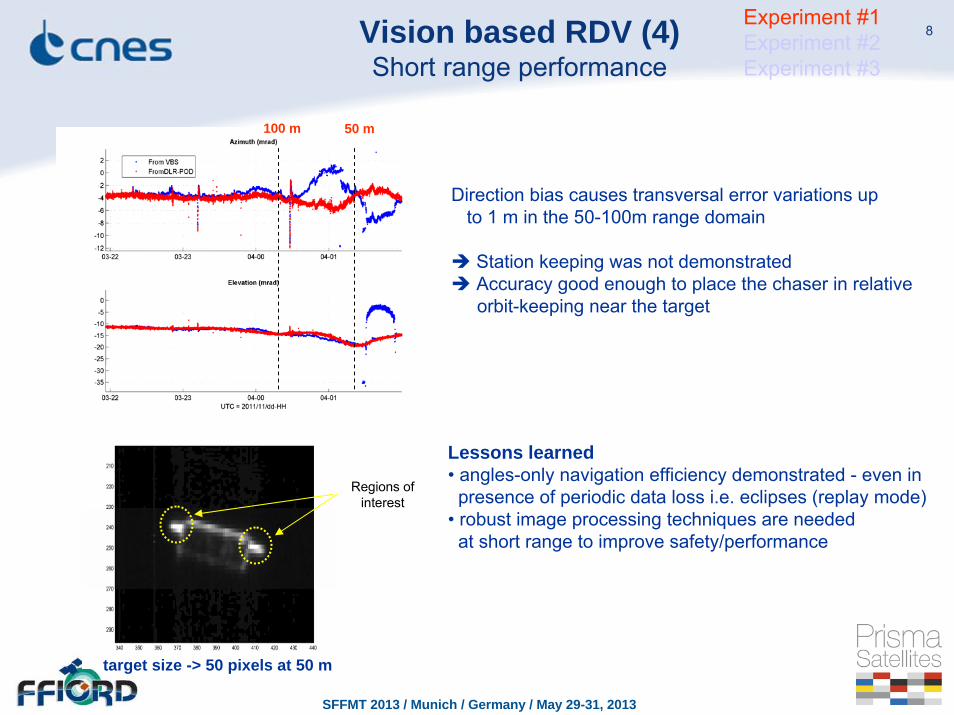
Direction bias causes transversal error variations upto 1 m in the 50-100m range domain
Station keeping was not demonstratedAccuracy good enough to place the chaser in relativeorbit-keeping near the target
target size -> 50 pixels at 50 m
Vision based RDV (4)Short range performance
Regions of interest
100 m 50 m
Lessons learned• angles-only navigation efficiency demonstrated - even inpresence of periodic data loss i.e. eclipses (replay mode)
• robust image processing techniques are neededat short range to improve safety/performance
Experiment #1Experiment #2Experiment #3
9
SFFMT 2013 / Munich / Germany / May 29-31, 2013
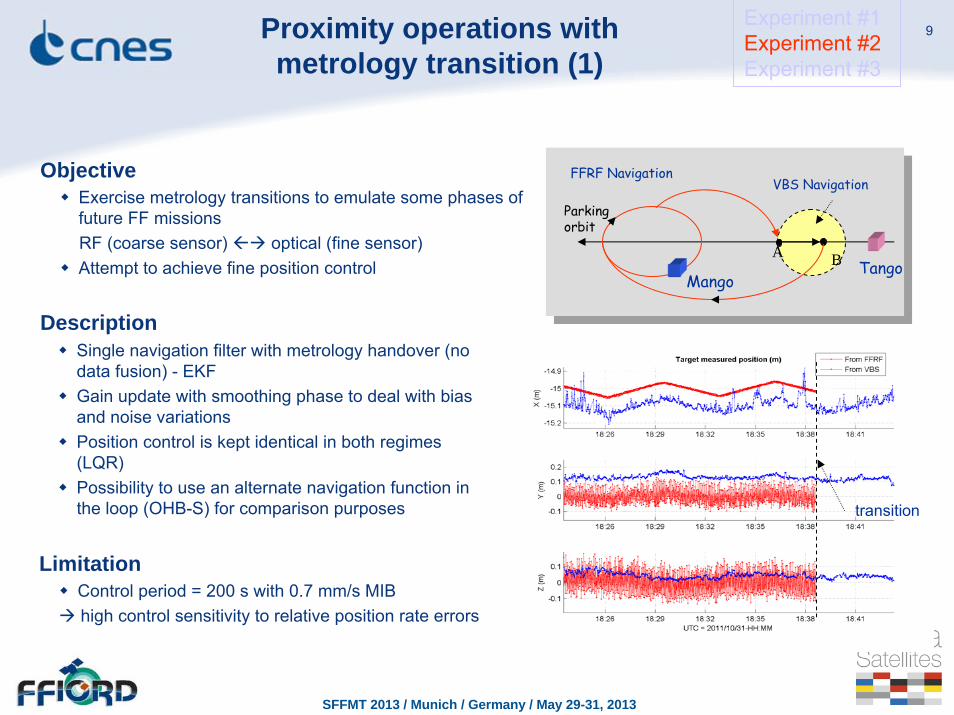
Proximity operations withmetrology transition (1)
transition
A B
Parking orbit
VBS Navigation
TangoMango
FFRF Navigation
DescriptionSingle navigation filter with metrology handover (no data fusion) - EKFGain update with smoothing phase to deal with biasand noise variations Position control is kept identical in both regimes(LQR) Possibility to use an alternate navigation function in the loop (OHB-S) for comparison purposes
ObjectiveExercise metrology transitions to emulate some phases of future FF missionsRF (coarse sensor) optical (fine sensor)Attempt to achieve fine position control
LimitationControl period = 200 s with 0.7 mm/s MIBhigh control sensitivity to relative position rate errors
Experiment #1Experiment #2Experiment #3
10
SFFMT 2013 / Munich / Germany / May 29-31, 2013
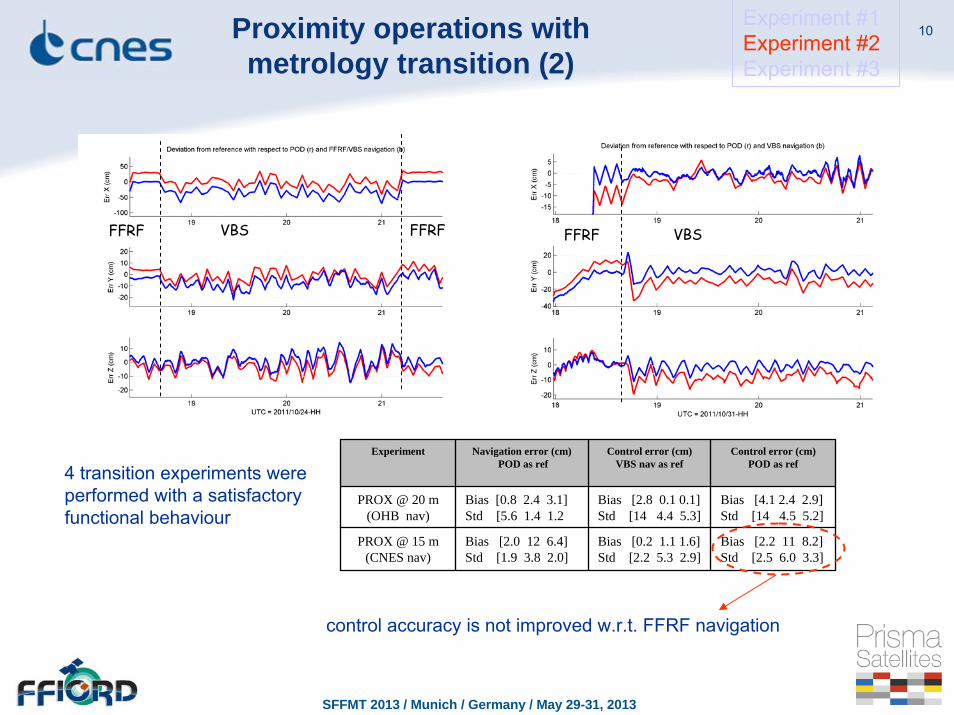
Proximity operations withmetrology transition (2)
Experiment Navigation error (cm)POD as ref
Control error (cm)VBS nav as ref
Control error (cm)POD as ref
PROX @ 20 m (OHB nav)
Bias [0.8 2.4 3.1]Std [5.6 1.4 1.2
Bias [2.8 0.1 0.1]Std [14 4.4 5.3]
Bias [4.1 2.4 2.9]Std [14 4.5 5.2]
PROX @ 15 m (CNES nav)
Bias [2.0 12 6.4]Std [1.9 3.8 2.0]
Bias [0.2 1.1 1.6]Std [2.2 5.3 2.9]
Bias [2.2 11 8.2]Std [2.5 6.0 3.3]
FFRF VBS
4 transition experiments wereperformed with a satisfactoryfunctional behaviour
FFRF VBS FFRF
control accuracy is not improved w.r.t. FFRF navigation
Experiment #1Experiment #2Experiment #3
11
SFFMT 2013 / Munich / Germany / May 29-31, 2013
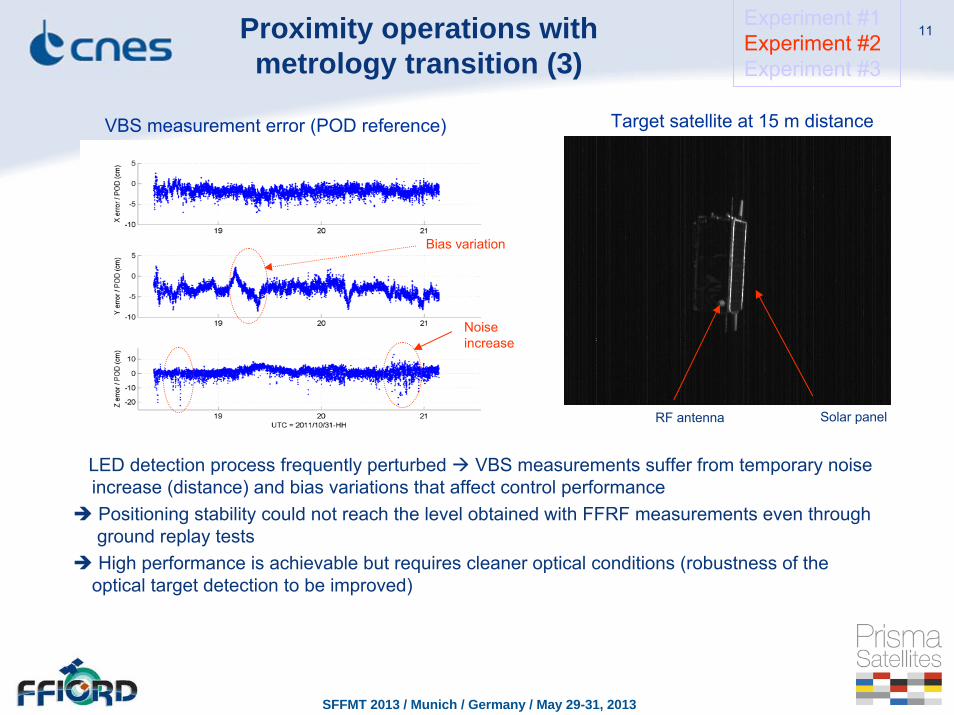
Proximity operations withmetrology transition (3)
LED detection process frequently perturbed VBS measurements suffer from temporary noise increase (distance) and bias variations that affect control performance Positioning stability could not reach the level obtained with FFRF measurements even throughground replay testsHigh performance is achievable but requires cleaner optical conditions (robustness of the
optical target detection to be improved)
Target satellite at 15 m distanceVBS measurement error (POD reference)
Solar panel
Bias variation
Noise increase
RF antenna
Experiment #1Experiment #2Experiment #3
12
SFFMT 2013 / Munich / Germany / May 29-31, 2013
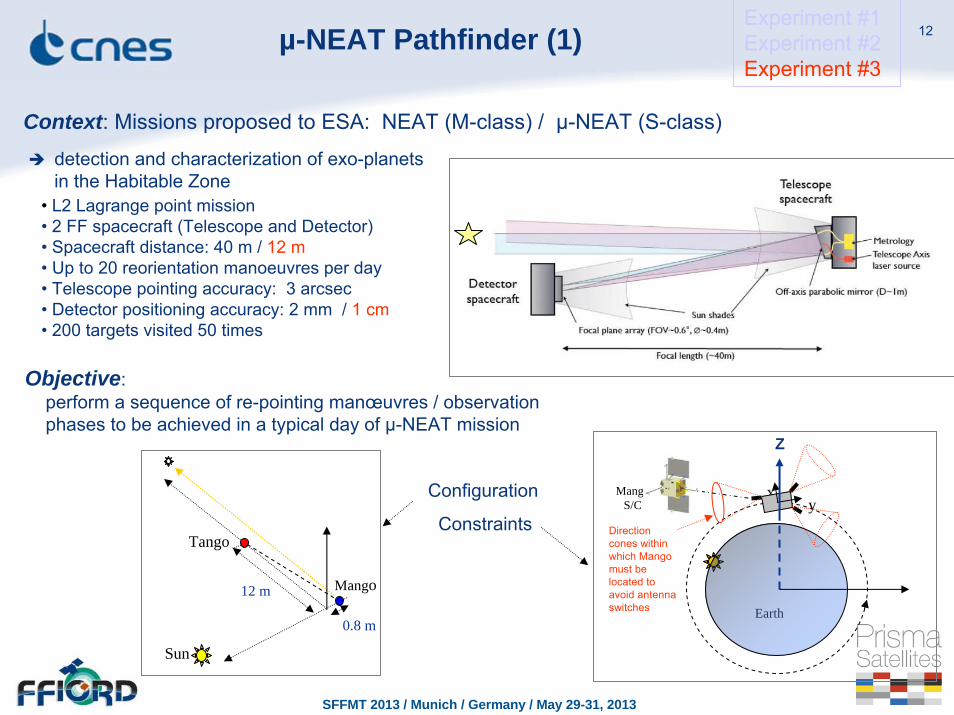
µ-NEAT Pathfinder (1)
• L2 Lagrange point mission• 2 FF spacecraft (Telescope and Detector)• Spacecraft distance: 40 m / 12 m• Up to 20 reorientation manoeuvres per day • Telescope pointing accuracy: 3 arcsec• Detector positioning accuracy: 2 mm / 1 cm• 200 targets visited 50 times
Context: Missions proposed to ESA: NEAT (M-class) / µ-NEAT (S-class)
detection and characterization of exo-planetsin the Habitable Zone
0.8 m
Sun
Tango
Mango12 m
Objective: perform a sequence of re-pointing manœuvres / observationphases to be achieved in a typical day of µ-NEAT mission
Earth
xy
Mango S/C
Z
Direction cones within which Mango must be located to avoid antenna switches
Configuration
Constraints
Experiment #1Experiment #2Experiment #3
13
SFFMT 2013 / Munich / Germany / May 29-31, 2013
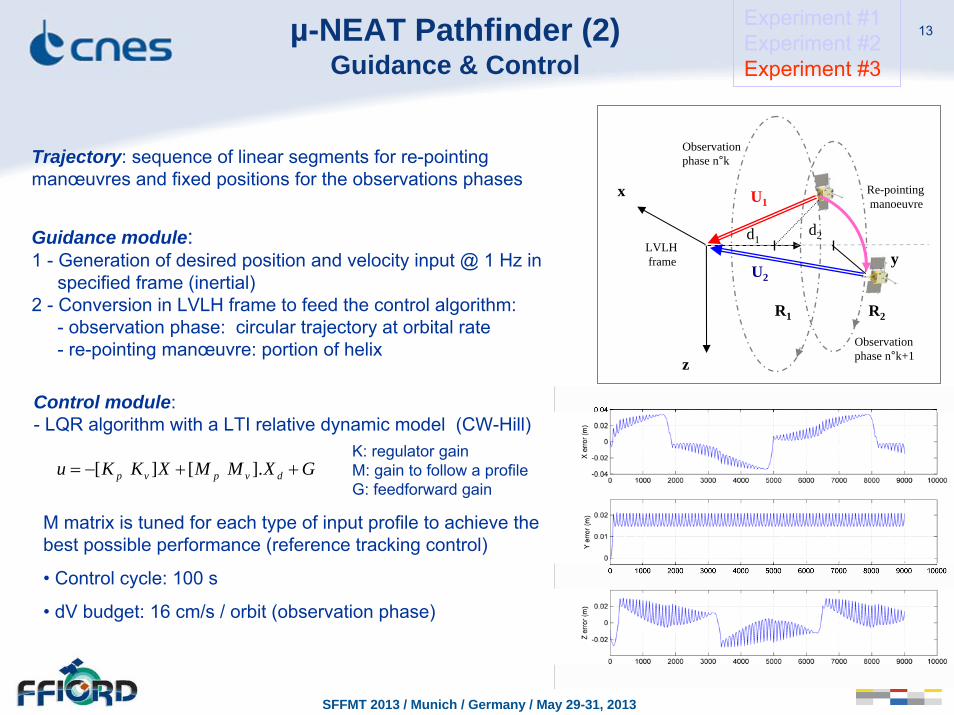
µ-NEAT Pathfinder (2) Guidance & Control
Trajectory: sequence of linear segments for re-pointingmanœuvres and fixed positions for the observations phases
Guidance module: 1 - Generation of desired position and velocity input @ 1 Hz in
specified frame (inertial) 2 - Conversion in LVLH frame to feed the control algorithm:
- observation phase: circular trajectory at orbital rate- re-pointing manœuvre: portion of helix
d1
R1
z
y
d2
R2
U1
U2
x Re-pointingmanoeuvre
Observation phase n°k
LVLHframe
Observation phase n°k+1
Control module:- LQR algorithm with a LTI relative dynamic model (CW-Hill)
GXMMXKKu dvpvp ++−= ].[][K: regulator gainM: gain to follow a profileG: feedforward gain
M matrix is tuned for each type of input profile to achieve the best possible performance (reference tracking control)
• Control cycle: 100 s
• dV budget: 16 cm/s / orbit (observation phase)
Experiment #1Experiment #2Experiment #3
14
SFFMT 2013 / Munich / Germany / May 29-31, 2013
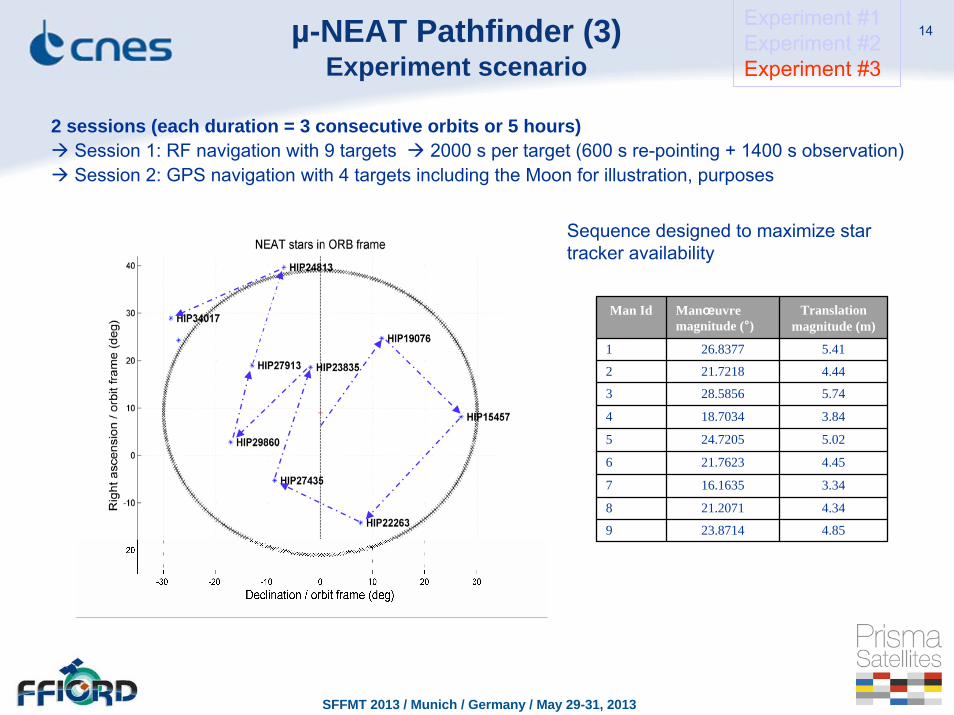
µ-NEAT Pathfinder (3)Experiment scenario
2 sessions (each duration = 3 consecutive orbits or 5 hours)Session 1: RF navigation with 9 targets 2000 s per target (600 s re-pointing + 1400 s observation) Session 2: GPS navigation with 4 targets including the Moon for illustration, purposes
Sequence designed to maximize star tracker availability
Man Id Manœuvremagnitude (°)
Translation magnitude (m)
1 26.8377 5.41
2 21.7218 4.44
3 28.5856 5.74
4 18.7034 3.84
5 24.7205 5.02
6 21.7623 4.45
7 16.1635 3.34
8 21.2071 4.34
9 23.8714 4.85
Experiment #1Experiment #2Experiment #3
15
SFFMT 2013 / Munich / Germany / May 29-31, 2013
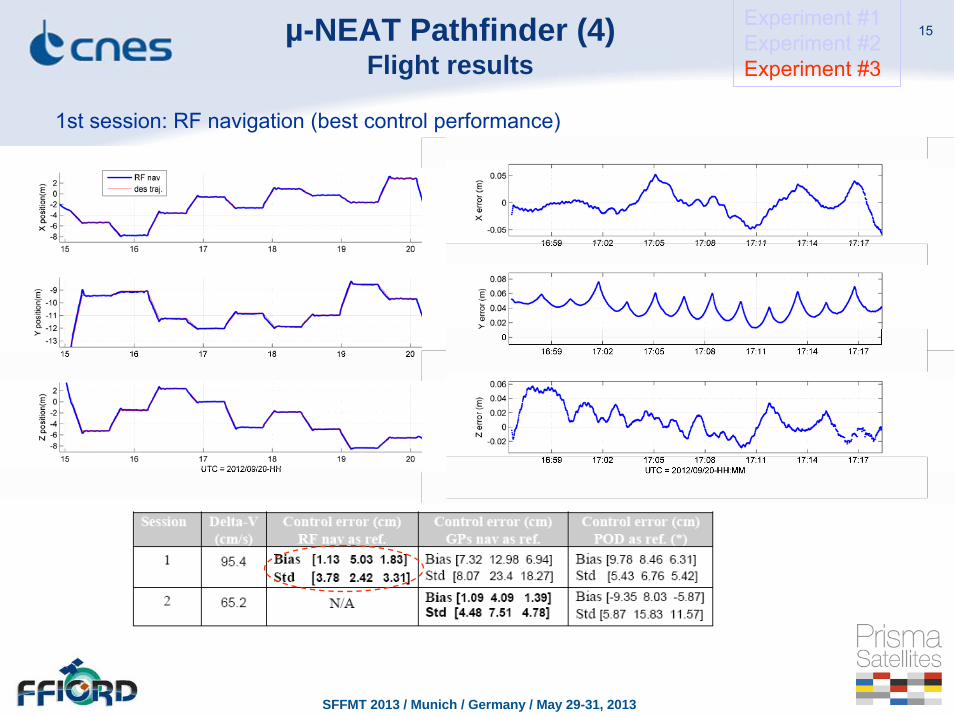
µ-NEAT Pathfinder (4)Flight results
1st session: RF navigation (best control performance)
Experiment #1Experiment #2Experiment #3
16
SFFMT 2013 / Munich / Germany / May 29-31, 2013
µ-NEAT Pathfinder (5)Illustration with DVS images
Expertise is applicable to the field of Active Debris Removal (guidance & control aspects and system constraints)
Experiment #1Experiment #2Experiment #3
17
SFFMT 2013 / Munich / Germany / May 29-31, 2013
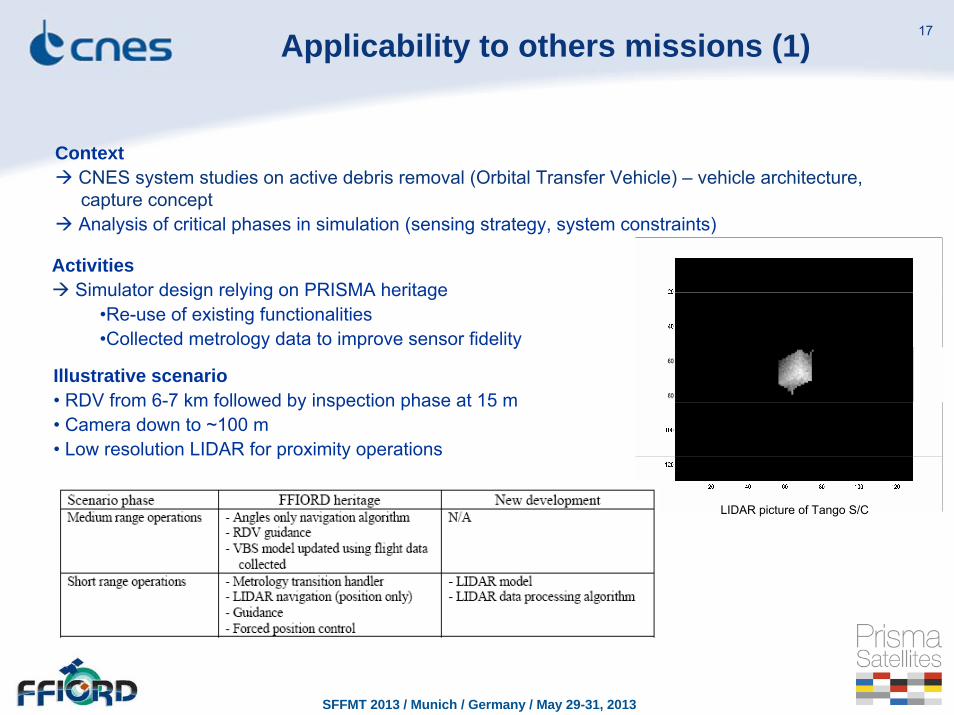
Applicability to others missions (1)
ContextCNES system studies on active debris removal (Orbital Transfer Vehicle) – vehicle architecture,capture conceptAnalysis of critical phases in simulation (sensing strategy, system constraints)
ActivitiesSimulator design relying on PRISMA heritage
•Re-use of existing functionalities•Collected metrology data to improve sensor fidelity
Illustrative scenario• RDV from 6-7 km followed by inspection phase at 15 m • Camera down to ~100 m• Low resolution LIDAR for proximity operations
LIDAR picture of Tango S/C
18
SFFMT 2013 / Munich / Germany / May 29-31, 2013
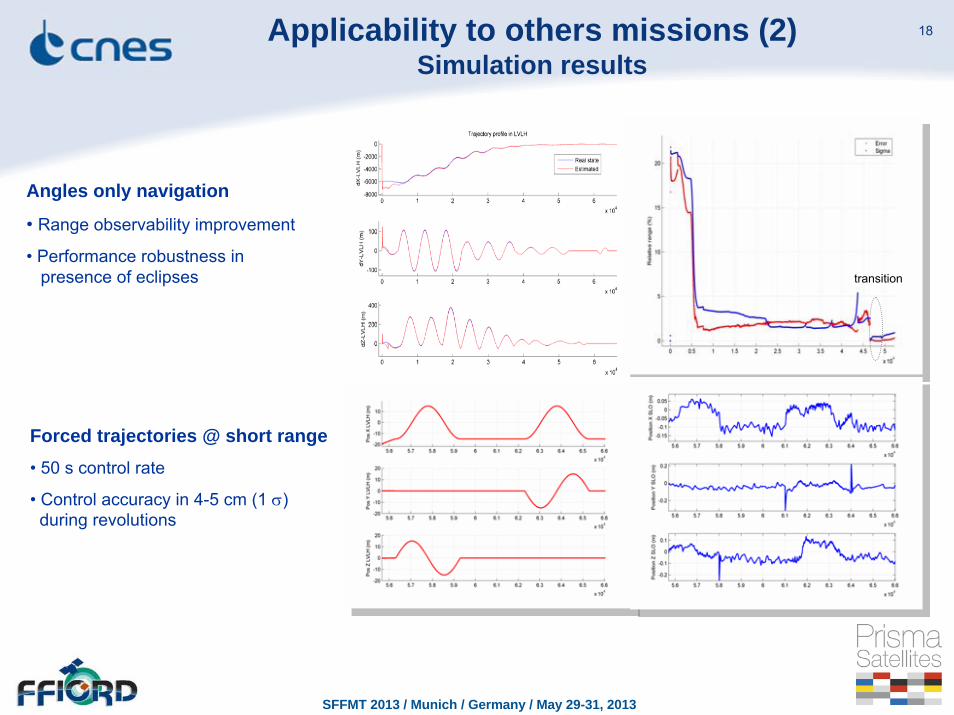
Applicability to others missions (2) Simulation results
Angles only navigation
• Range observability improvement
• Performance robustness inpresence of eclipses
Forced trajectories @ short range• 50 s control rate
• Control accuracy in 4-5 cm (1 σ)during revolutions
transition
19
SFFMT 2013 / Munich / Germany / May 29-31, 2013
Conclusion
■ PRISMA extended mission allowed to show the capabilities / flexibility of the overallsystem and increase the CNES technical return
second vision based autonomous RDV experiment (first by OHB-S)angles-only navigation is a valid technique to RDV with a non cooperative object
transition between RF and optical metrology stagesevaluate issues in terms of navigation / control performance
first demonstration of LEO formation flying with inertial pointingillustrate the margin of improvement achievable on higher orbits
■ The applicability of this technical return was illustrated in the field of Active DebrisRemoval (sensor flight data, GNC functions) to speed-up the evaluation of approachcandidate scenarii
■ Perspectives: Next studies like NEAT will benefit from the same experience (phase 0 to be started soon in CNES)