Embed Size (px)
Citation preview

Resource Management of Highly Configurable Tasks
April 26, 2004
Jeffery P. Hansen Sourav Ghosh
Raj Rajkumar John P. Lehoczky
Carnegie Mellon University

Outline
• Radar Tracking Problem
• Introduction to Q-RAM
• Application of Q-RAM to Radar Tracking
• Slope-Based Traversal
• Fast Traversal
• Experimental Results
• For each target we need to choose:– Radar parameters such as dwell
period, dwell time and transmit power.
– Ship/antenna to use.
– Signal processing algorithm to use.
– CPU from processing bank to use.
• While satisfying constraints on:– Power dissipation
– Radar and CPU Utilization
– Scheduling
• We must quickly respond to:– Changes in target position
– New target arrivals
– Target departures
Resource Management for Radar Tracking

0%
50%
100%
0%
50%
100%
Radar Resource Management Approaches
• Existing solutions use operational doctrine to make resource allocation decisions.
– Resources allocated to tasks in order of importance based only on each task’s characteristics.
– Some problems with this approach are:• Important tasks can starve tasks of slightly
lower priority.• Does not make best use of resources.• Difficulty in predicting viable scenarios.
• QoS-based optimization considers resource tradeoffs and relative task importance.
– Resources allocated in proportion to importance.– Tasks can have unlimited access to resource
when demand is low.– Tasks can not starve other tasks of similar
importance.– Operator can dynamically change importance.
Priority-Based Allocation
QoS-Based Optimization

QoS Optimization with Q-RAM
Image Resolution
Fra
mes
/sec
.
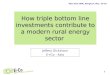
• QoS modeled as an n-dimensional space – Each set-point in the space has an associated
“utility” value representing user satisfaction.– Utility values can be assigned individually or
via dimension-wise utility functions. • A single QoS set-point can be realized by multiple
“Resource Options”.– Resource trade-offs– QoS Routing
• Optimization goal is to maximize total system utility while meeting resource constraints.
• Per-user weights give higher priority to “important” users.
• Near optimal solution for search space of over a trillion QoS setpoint combinations found in under 1 sec.

QoS Model of Radar Tracking Problem
Resources• Radar bandwidth• Short-term power• Long-term power• CPUs• Memory
Operational Dimensions• Dwell Period• Dwell Time• Transmit Power• Tracking Algorithm• # of task replicas
Environment• Distance • Speed• Direction• Maneuvering• Counter Measures
ThreatAssessment
QoS Dimensions• Track Error• Target Drop Probability• Reliability
MarginalUtility
Control
QoS Setpoints
QoSResourceOption 1
ResourceOption 2
Utility
(0.0)
(0.4)
(0.6)
(1.0)
CPU0.999
0.999
CPU
CPU
CPU
CPU
CPU
0.99999
0.99999
CPU CPU
CPU
CPU
CPU
CPU

Radar Constraint/Resource Model
Per Antenna Constraints:
Global Constraints:maxP maxC
1H
1U 2U
2H …
R1 R2Global
Computing (Cmax) –
Limit on processing capabilities for tracking targets.
Power (Pmax) – Limit on
power that can be provided to power radars.
Heat (Hi ) – Limit on heat
that can be dissipated per unit time.
Utilization(Ui ) – Limit on
fraction of time radar can be in continuous use.
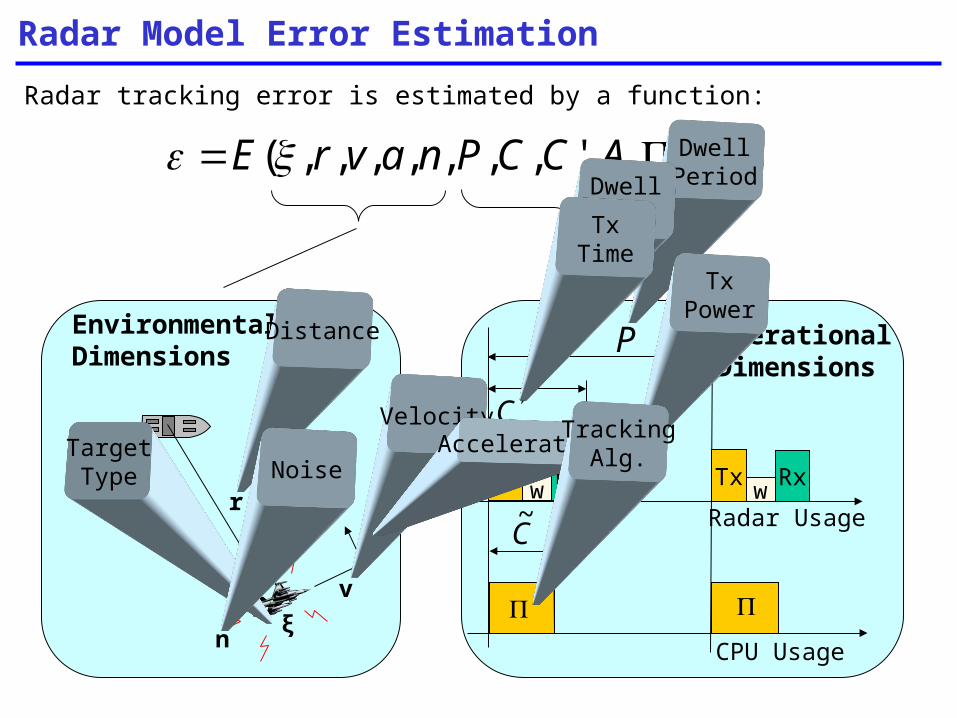
Radar Model Error Estimation
Radar tracking error is estimated by a function:
),,',,,,,,,( ACCPnavrE
EnvironmentalDimensions
r
v
a
ξn
C~
PC
C
A
CPU Usage
Radar Usage
OperationalDimensions
wTx Rx
wTx Rx
TargetType
Distance
VelocityAcceleration
Noise
DwellPeriodDwell
TimeTxTime
TxPower
TrackingAlg.

Setpoint Explosion Problem
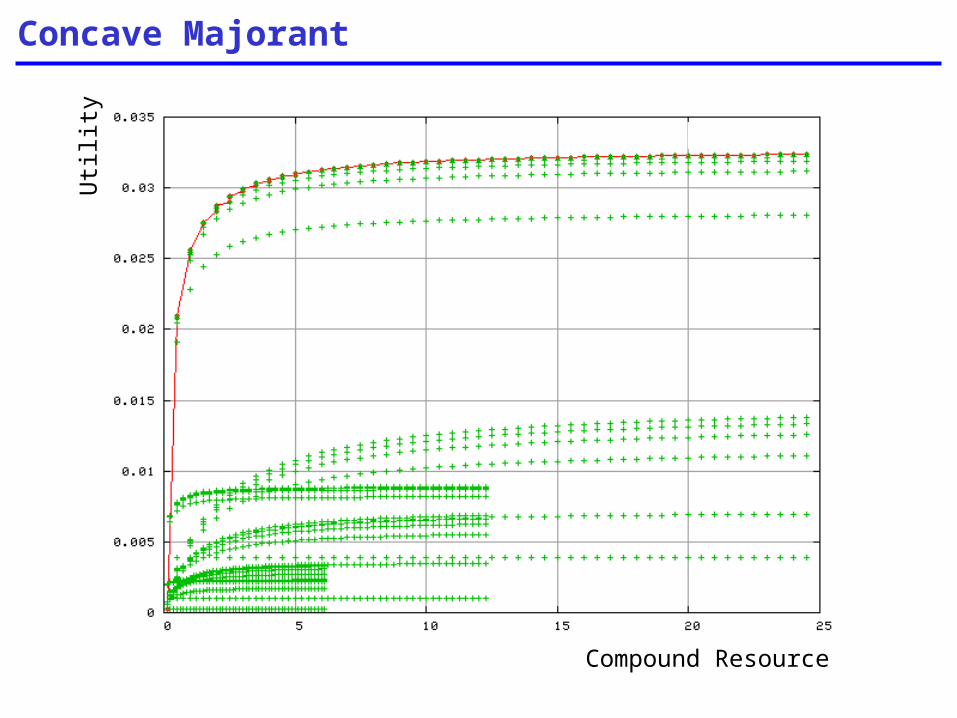
• Concave majorant algorithm used by Q-RAM requires O(n ln n) and must examine every setpoint.
• For applications with more than a few operational dimensions, the number of setpoints can be very large – With k dimensions having m settings, there
are mk setpoints.– Even a linear algorithm may take a long time.
One Dimension
Two Dimensions
Three Dimensions Four Dimensions
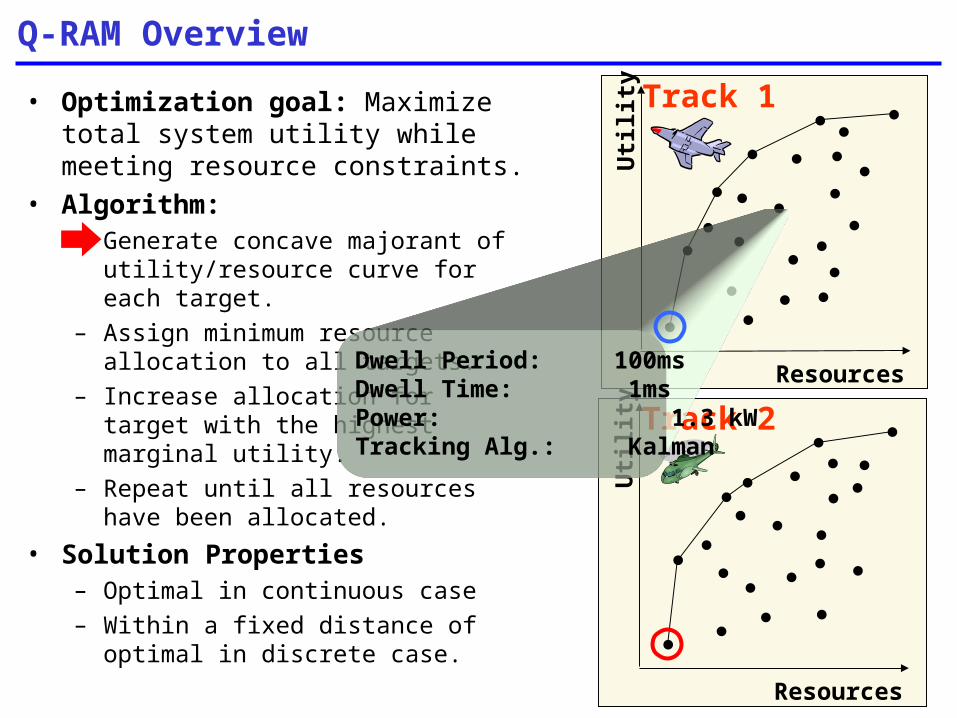
• Optimization goal: Maximize total system utility while meeting resource constraints.
• Algorithm:– Generate concave majorant of
utility/resource curve for each target.
– Assign minimum resource allocation to all targets.
– Increase allocation for target with the highest marginal utility.
– Repeat until all resources have been allocated.
• Solution Properties– Optimal in continuous case
– Within a fixed distance of optimal in discrete case.
Q-RAM Overview
Resources
Uti
lity
Resources
Uti
lity
Track 1
Track 2
Dwell Period: 100msDwell Time: 1msPower: 1.3 kWTracking Alg.: Kalman

Slope Based Traversal
• Algorithm– Determine minimum and maximum
QoS points.– Eliminate points under the line
connecting them.– Apply concave majorant to remaining
points.
• Initial scan is linear– Reduces number of points to which
we must apply the concave majorant algorithm.
– Some reduction in execution time.– But, still must examine every setpoint.
Compound Resource
Uti
lity

Fast Convex Hull Algorithms
• Resource/utility values associated with setpoints are not random.
• Utilize structure in the resource management problem to reduce this complexity.
• For most operational dimensions, an increase in quality on any dimension results in:– Non-decreasing resource consumption.– Non-decreasing utility.
• We call dimensions with the above property “monotonic” dimensions.
• All other dimensions are called “non-monotonic” dimensions. Dwell Period
Tra
nsm
it P
ow
er
R U R U
R U

<1,*>
<2,*><3,*>
<*,1>
<*,2>
<*,3>
<*,4><*,5>
Fast Traversal Methods
Observations of the points on the concave majorant have revealed that for monotonic dimensions:– Concave majorant is usually
composed of sub-sequences of points differing in only one quality index.
– Dimension that is changing may shift as the concave majorant is traversed.
– May need to treat “non-monotonic” dimensions separately.
Compound Resource
Uti
lity
<1,1>
<1,2>
<1,3>
<1,4> <2,4> <3,4> <3,5>

Fast Traversal Algorithms
• FOFT: First Order Fast Traversal Algorithm:– Make the minimum QoS point the
current point.
– Examine points adjacent in the quality index space to the current point.
– Choose next point with highest marginal utility.
– Repeat until reaching maximum QoS point.
– Apply concave majorant to resulting set of points.
• Generates nearly the same set of points as full concave majorant.
• Explicitly examines only a small subset of the possible setpoints.
• Utility values within a few percent of standard Q-RAM algorithm.
Dwell Period
Tra
nsm
it P
ow
er
Compound Resource
Uti
lity
R*
U
R*
U
R*
UR*
U
R*
U
R*
U
R*
UR*
U
R*
UR*
U
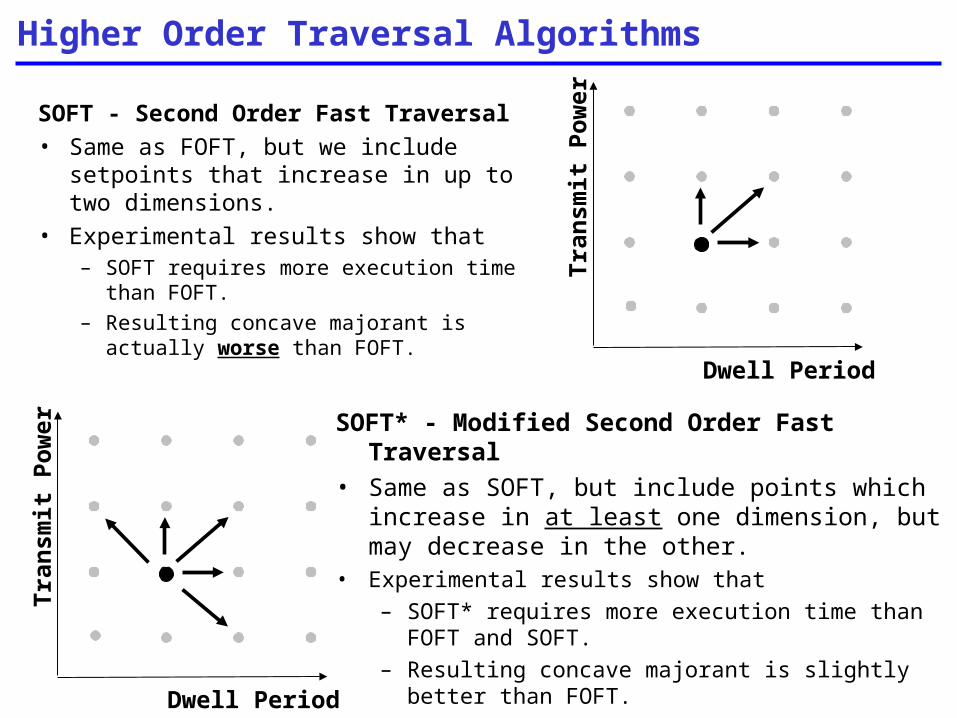
Higher Order Traversal Algorithms
SOFT* - Modified Second Order Fast Traversal• Same as SOFT, but include points which
increase in at least one dimension, but may decrease in the other.
• Experimental results show that
– SOFT* requires more execution time than FOFT and SOFT.
– Resulting concave majorant is slightly better than FOFT.
Dwell Period
Tra
nsm
it P
ow
er
SOFT - Second Order Fast Traversal• Same as FOFT, but we include setpoints
that increase in up to two dimensions.• Experimental results show that
– SOFT requires more execution time than FOFT.
– Resulting concave majorant is actually worse than FOFT.
Dwell Period
Tra
nsm
it P
ow
er
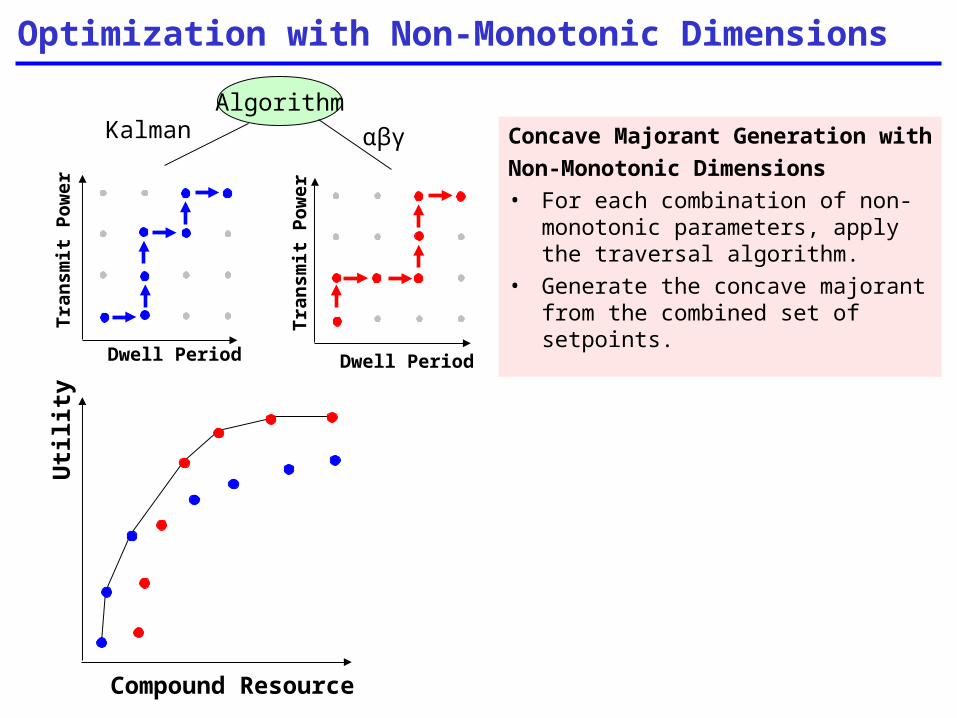
Optimization with Non-Monotonic Dimensions
Compound Resource
Uti
lity
Dwell Period
Tra
nsm
it P
ow
er
Dwell Period
Tra
nsm
it P
ow
er
AlgorithmKalman αβγ Concave Majorant Generation with
Non-Monotonic Dimensions
• For each combination of non-monotonic parameters, apply the traversal algorithm.
• Generate the concave majorant from the combined set of setpoints.
Concave Majorant
Compound Resource
Util
ity

Slope-Based Concave Majorant

FOFT Concave Majorant Approximation
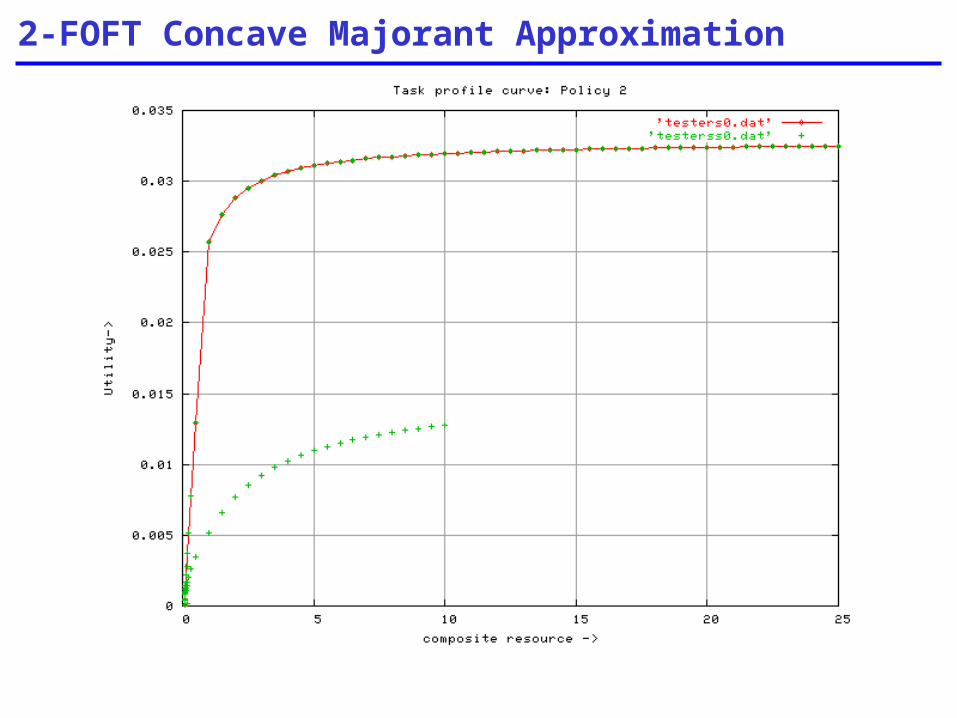
2-FOFT Concave Majorant Approximation

Global Utility
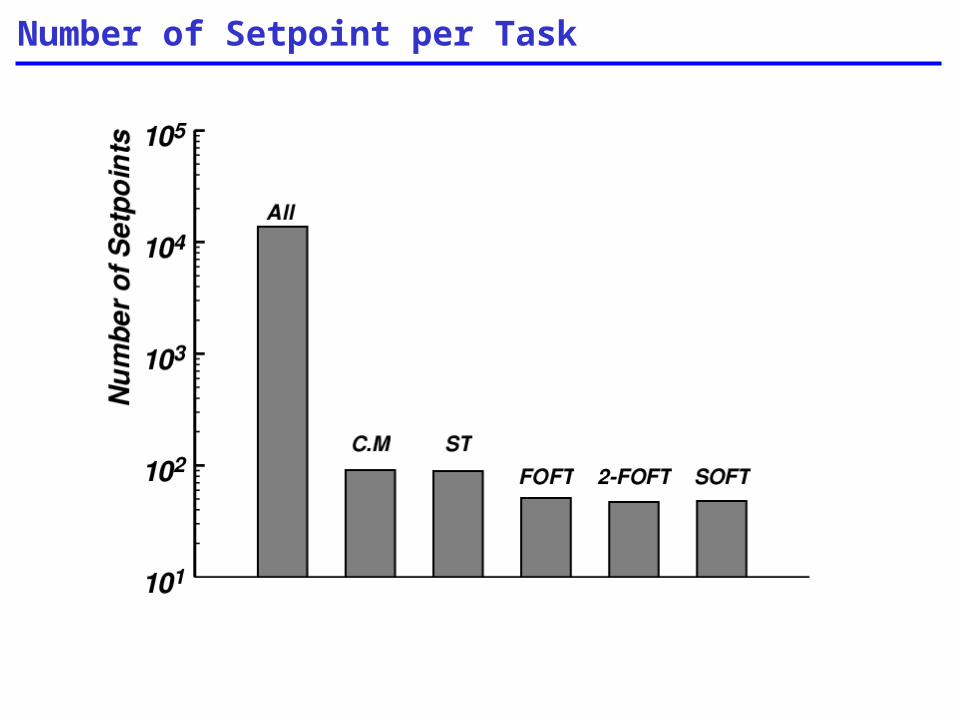
Number of Setpoint per Task
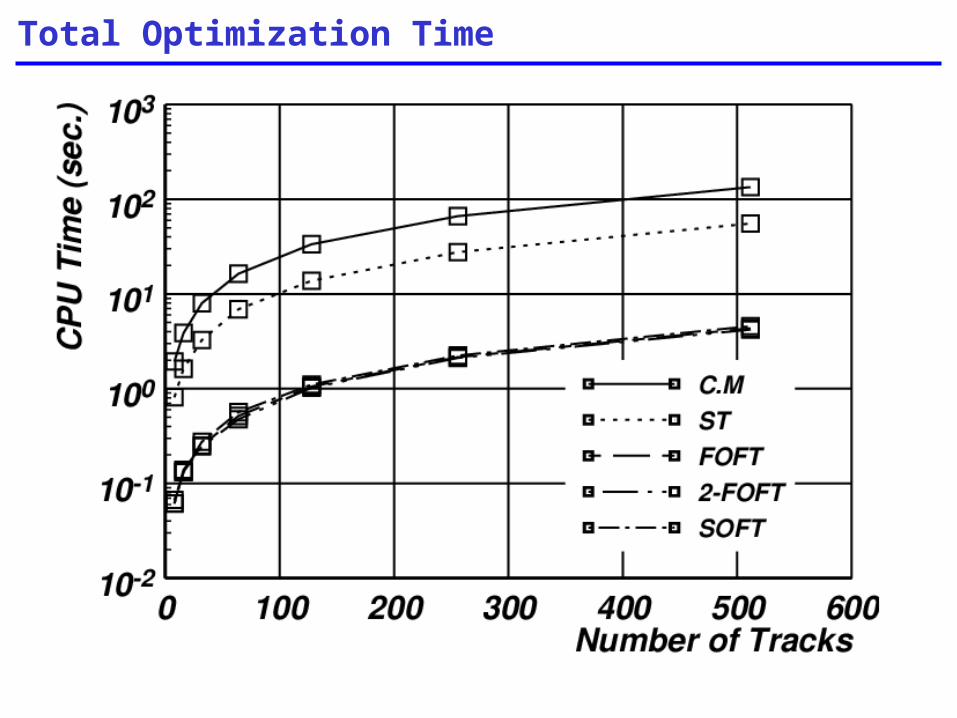
Total Optimization Time
Conclusion
• Approach Overview– Leverage structure in the setpoint space to generate concave majorant
approximation.
– Concave majorant estimated by following the adjacent point on the monotonic dimension with the highest marginal utility.
– Algorithm repeated for all combinations of non-monotonic dimensions.
• Benefits of Approach– Significantly reduces the number of setpoints that must be examined to
obtain a concave majorant estimate.
– Complexity is sub-linear in the number of setpoints.
– Works best when most operational dimensions are monotonic.
• Results– No significant reduction in solution quality.
– Order of magnitude reduction in optimization time.