-
RESOLUTION OF RANGE AND VELOCITY AMBIGUITY FOR A MEDIUM PULSE
DOPPLER RADAR
Wen Lei, Teng Long, Yueqiu Han,
Beijing Institute of Technology, Beijing, I? R.China Beijing
Institute of Technology, Beijing, I? R.China Beijing Institute of
Technology, Beijing, I? R.China
Abstract
In medium pulse repetition frequency (MPRF) radars, ambiguities
exist both in range and Doppler measurements. Some efficient
techniques have been established to resolve the range and velocity
ambiguity of the target using multiple PRFs.
In this paper, a simple algorithm is proposed to resolve both
range and velocity ambiguity based on residue arithmetic. This
algorithm makes out the unambiguous result by using a residue
look-up table. The particular problem about filter bandwidth
unitary in frequency is settled and assessed with another
algorithm. An example for the generation of the residue look-up
table is presented to resolve range ambiguity.
1. Introduction
In order to get unambiguous range and velocity value
simultaneously, MPRF waveform is chosen for modem airbome radar. As
MPRF waveform produces ambiguous measurements for both range and
velocity, a common technique is to use multiple PRFs to settle this
problem, which needs an algorithm to resolve the ambiguity of range
and frequency in multiple PRFs.
For a given set of PRFs, Chinese Remainder Theorem has been
established to resolve ambiguity [ 1-3 1. However, when the
measurement error exists, the result error is usually very large.
Clustering algorithm is also suggested with the minimum squared
error criterion [4,5]. Apparently, it has good anti-error ability
and expensive computational throughout. An algorithm based on the
choice of particular values for the PRFs is provided for velocity
ambiguity resolution, where a quasi-maximum likelihood criterion is
maximized for ambiguity order estimation [6]. Considering the blind
area both in time and frequency, this algorithm is so limited by
particular PRFs that it is not fit for other combinations of PRFs
to resolve velocity ambiguity.
In this paper, a simple algorithm is proposed which takes into
account presumptive redundancy error to improve the ability against
measurement errors. Its fast implementation relies on the
established look-up table. The look-up table should be modified
when the blind area can't be overlooked, to assure the completeness
of the table.
Furthermore, the performance of the suggested method about the
frequency filter bandwidth unity is compared with that of the
clustering algorithm, each has its advantages.
The proposed method is so simple that it can be easily processed
in real time processing.
2. Range and Frequency Ambiguity Resolution
2.1 The Principle of the Residue Look-Up Table Algorithm
This method makes use of the differences of the residues on
different PRF to resolve ambiguities. First, it selects the residue
of one PRF as the reference. Then it makes the differences of the
residues on other PRFs and the reference PRF into a look-up
table.
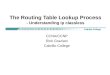
Take an example of m different PRFs in time. The principle of
the method is the same on the frequency, as shown in figure 1 ,
where represents different pulse repetition time (PRT).
When the target. locates on T , its residue q on different PRF
can be described as:
5 = T - N f c = mod(T,c) i = 1,2,..-,m (1) Where N i is the
ambiguous order, mod(A,B)
If taking the residue of mB PRF as the reference, the represents
the module of A to B.
values stored in the look-up table can be described as: ei,k =
ri - rm i=1,2,...,m-l (2)
Where ei,k represents the differences between the residues of
the range bin on different PRF and the reference, k represents
which group table value it is. In the table, the sect value Bk , B,
= NmTm, is also stored corresponding to the k" group values. Here
only one Bk corresponds to some PRF residue set.
So each group in the table has m values. The first m-I values
represent the differences between the measured ambiguous range and
the reference. The last value is the range sect value of the
reference.
The process of de-ambiguity can carry through as follows:
0-7803-5776-O/OO/$lO.OO 0 (2000 IEEE) 560
IEEE INTERNATIONAL RADAR CONFERENCE
-
Stepl: a set of measured ambiguous range values is obtained.
Step2: the measured ambiguous range value of the mth PRF is
taken as the reference.
Step3: the real range sect value is derived from the matched
values in the look-up table, according to the differences between
the measured ambiguous range of other PRF and the reference. The
range sect value is obtained as N,T, of the mth PRF.
Step4: the result will be (3)
If error exists in the measured ambiguous range values, the
search will leave some room for admitting the error. The difference
e,' between measured ambiguous range on other PRF and reference PRF
can be described as:
Where Mi presents the measured error on different PRF, r, + Mi
represents the measured ambiguous range value.
So the process of resolving the range ambiguity is to find ei,,
which meet the equation ( 5 ) and (6), and some
error redundancy 6 exists between ei,, and ei' .
T = N,T, + r,,,
ei'=r, +Mi -r , -M, (4)
According to the e,+ and its corresponding range
sect value B, , the resolved ambiguous range is B, + r ,
+M,.
2.2 The Complete Residue Look-up Table Algorithm If the
resolving power of radar decreases to some
degree, i.e., the size of range resolution AR is large enough
which meets inequality (7), where t, represents the width of blind
range area. And if these PRFs meet equality (8):
2AR > t, (7) k,T, =kzTz + S , SS26,- (8)
Where rb represents the width of blind range area, S,,
represents the maximum measured error.
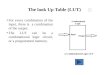
Then the former look-up table method can't find the answer in
the table, and can7 resolve the ambiguity. Figure 2 shows an
example of some range bin T, which will fall into the blind range
area of TI and T, simultaneously. The dashed line indicates the
location of T.
Because the maximum measured range error normally be f l bin,
redundancy 6 can be taken as 2. If there is +1 measured error of T
on TI, -1 measured error of T on T,, and the target can be seen on
both PRF, and locate at the
dashed-dotted position. So T locates at the current repetition
of TI, while at the former repetition of T,, Under this condition,
the result can't be found in the look-up table. While modified
look-up table algorithm takes into account this status, joining the
difference of the residues, which has redundant error, and its
corresponding range sect value into the look-up table.
2.3 Example for application Example 1: three PRFs are adopted to
resolve range
ambiguity. LetT, =103,T2 =119,T3 =137,R, =1500(the
width of the range bin is taken as 1 IJ s, the maximum detection
range R,,, is 225km), [hi 1 = N I 1 .
Take T, = 137 as the reference PRT, B is the range sect value of
the reference PRT, A (T, - T3 ) represent the differences between
the residue on the i" PRT and the residue on the third PRT.
Then the values in the look-up table are obtained as table
1.
Let the true range of the target be R = 574, then the residues
on different PRT should be r, =59,r2 =98,r, =26 . If the measured
ranges on different PRT are
r, =60,r, =99,r3 =25, then Sl=r, -r3 = 3 5 t
6 2 = r, -r, = 74. Let the redundant error be 2. From the table,
the 14Ih group values (33,72,548) meet the requirement of
inequality ( 5 ) and equation (6), and the corresponding range sect
value B=548. The real range value can be got from R' = B +r3 = 573
with range error of 1.
I I I l t
I 1
I
3. Algorithm Performance Analysis
As discussed in the previous section, the Chinese Remainder
Theorem is easy to use, but anti-error capability is not so
good.
The error performance of residue look-up table algorithm is
identical to clustering algorithm by using only two PRFs. By using
more than three PRFs, clustering algorithm completely utilizes the
relationship between PRFs, calculating all the mean squared error
of possible range. While residue look-up table algorithm only makes
use of part of the relationship, i.e. only calculating the squared
error between these measured ambiguous range value and the
reference. But because of the number of PRF utilized increasing,
i.e. the number of values which can be used to search the table are
increased, the possibility of
561
iEEE INTERNATIONAL RADAR CONFERENCE
-
error is largely cut down. Let the number of PRF be m, and the
sum of all the
number of the repetition on m PRF be N. By Clustering algorithm,
which needs at first rank all the possible solutions, it will cost
N computational steps. Then in order to get the minimum mean
squared error solution, it still needs about N circular
computation, each circular computation includes m-1 addition, 1
division, m subtraction, m squares. So it needs at least (3m+l)N
computation. The residue look-up table algorithm also needs about N
circular computation, each circulation includes m-1 compare, but it
usually not needs equation (6) So the total computation is
approximately (m-1)N. Then it seems that the computational
throughout of residue look- up table algorithm is less than the
clustering algorithm.
4. Special Issues on Frequency Bandwidth Unitary
The prerequisite in solving frequency ambiguity is to settle the
fundamental problem of different filter bandwidth at different PRFs
by requantizing the ambiguous Doppler measurements to a unique
reference PRF. In the process of re-quantizing, it needs to round
the unified frequency value.
On the base of requantization, the error performance of the
residue look-up table algorithm and the clustering algorithm can be
evaluated as follows:
To explain what happens during requantizing, let us consider the
instance of two PRFs.
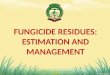
The errors of the rounded-unified frequency are shown in figure
3. Where MI and n separately represent the decimal fraction and the
integer of the rounded-unified measured ambiguous frequency. Af,
and NI separately represent the decimal fraction and the integer of
the rounded-unified measured ambiguous order frequency. w3
represents the error of the rounded-unified real frequency, -0.5
< q3 < 0.5. Af4 represents the integer of Af3, i.e., when
-0.5
-
there exists error 1. If the clustering algorithm is adopted,
then the result will be consistent with the real result.
When 44= -1, AFl>Lv;,. The ability of de- ambiguity for
residue look-up table algorithm is better than that for clustering
algorithm. The principle is similar as in figure 4.
I
(2)If 4, and 42 meet: 0.5
-
: Ni Ni+n N?n+ 1
Figure 3c. Fraction of the Rounded-Unified Measured
Frequency
V,=A(T,-T3) 0 -103 -103 34 -69 -69 68 -35 ... - 1 33 ... -72 -65
72 ... -58 v,=ACr,-Ts) 0 0 -119 18 18 -101 36 36 ...
A
Ni Ni+n Ni+n+ 1 Figure 4a. Unified Location of Real
Frequency
(not rounded)
k Ni N,+1
Figure 4b. Unified Location of Ambiguous Order Frequency (not
rounded)
clr n n+l
Figure 4c. Unified Location of Measured Ambiguous Frequency (not
rounded)
564 IEEE INTERNATIONAL RADAR CONFERENCE