Embed Size (px)
DESCRIPTION
Modeling of Fatigue crack growth with ABAQUS software
Citation preview
GRADUATE RESEARCH REPORT
ECIV 797: CIVIL ENGINEERING RESEARCH
Submitted by-
Md. Mozahid Hossain PhD student,
Department of Civil Engineering
Advisor-
Dr. PAUL H. ZIEHL, P.E.
Department of Civil Engineering

1
MODELING OF FATIGUE CRACK GROWTH WITH ABAQUS
By Mozahid Hossain
Research Assistant, Department of Civil Engineering, University of South Carolina, Columbia, SC, e-mail: [email protected]
Abstract:
Fatigue crack initiation in steel structures is one of the most important considerations
facing the infrastructure community. Purely static loading is rarely observed in structural
components. Almost 80% to 95% of all structural failures occur through a fatigue
mechanism. As a result, fatigue analysis has become an early driver in the product
development processes of a growing number of companies.
The traditional approach for determining the fatigue limit for a structure is to establish the
curves (load versus number of cycles to failure) for the materials in the structure. Such an
approach is still used as a design tool in many cases to predict fatigue resistance of
engineering structures although it is generally conservative and no relationship between the
crack length and the cycle number is available.
The computational process to simulate the slow progressive damage in steel over many
load cycles is simple but numerical fatigue life studies usually involve the response of the
structure subjected to a small fraction of the actual loading history. This response then
might be extrapolated over many load cycles using empirical formulae to predict the
likelihood of crack initiation and propagation.
The direct cyclic analysis capability in ABAQUS/Standard provides a computationally
effective modeling technique to obtain the stabilized response of a structure subjected to
periodic loading and is ideally suited to perform low-cycle fatigue calculations on a large

2
structure. The direct cyclic low-cycle fatigue capability is an extension of the direct cyclic
capability that includes damage accumulation and damage extrapolation. It provides
capabilities to model damage growth in steel structure. In material the cyclic loading leads
to stress reversals and the accumulation of plastic strains, which in turn cause the initiation
and propagation of cracks. The damage initiation and evolution are characterized by the
stabilized accumulated inelastic hysteresis strain energy per cycle. The objective of this
research report is to simulate the fatigue behaviour of structural steel with ABAQUS6.9-2.
Significant performance gains with good accuracy of the direct cyclic low cycle fatigue
capability are clearly demonstrated.
Keywords: Cracks, cyclic loading, Low-cycle fatigue, Abaqus, Cyclic loading Mozahid Hossain is a PhD student in the Department of Civil Engineering at University of South Carolina, Columbia, SC. His research interest includes Self Powered Wireless Sensor Network for Structural Bridge Health Prognosis.
3
TABLE OF CONTENT
ABSTRACT……………………………………………………………………... 1
TABLE OF CONTENT…………………………………………………………. 2
LIST OF FIGURE……………………………………………………………… 4
1.0 FATIGUE ANALYSIS …………………………………………………………. 5
2.0 LOADING ……………………………………………………………………..... 6
3.0 MATERIAL PROPERTIES……………………………………………………... 7
4.0 FATIGUE CRACK GROWTH …...……………………………………………. 9
5.0 MODELING WITH ABAQUS………………………………………………….. 23
6.0 FUTURE STUDY ………………………………….…………………………… 29
7.0 REFERENCES ………………………………….………………………………. 31
4
LIST OF FIGURE
Figure 1 Load: (a) Ramp; (b) Step ………………………………………………. 6
Figure 2 Generic representation of the Stress-Strain curve ……………………… 9
Figure 3 Strain-life relation (Coffin-Manson) …………………………………… 10
Figure 4 Plastic shakedown in direct cycling analysis (ABAQUS Manual) …….. 11
Figure 5 Elastic stiffness degradation as a function of the cycle number………... 11
Figure 6 Fatigue crack growth governed by the Paris law ………………………. 12
Figure 7 Schematic sigmoidal behavior of fatigue crack growth rate versus ∆K .. 14
Figure 8 Schematic mean stress influence on fatigue crack growth rates………... 15
Figure 9 Nomenclature for constant amplitude cycling loading ……………….... 19
Figure 10 Elastic stresses near the crack tip (a<<1) ………………………………. 96
Figure 11 Plastic zone size at the tip of a through-thickness crack ……………….. 20
Figure12 Line contour surrounding a crack tip for J-integral formulation……….. 22
Figure 13 Compact Tension Specimen ………………………………….………… 23
Figure 14 Cycling load ………………………………….………………………… 25
Figure 15 Cycling load ………………………………….………………………… 25
Figure 16 Cycling load ………………………………….………………………… 26
Figure 17 Cycling load………………………………….…………………………. 26
Figure 18 Meshing ………………………………….…………………………….. 27
Figure 19 Von Mises Stress………………………………….…………………….. 27
Figure 20 Piezoelectric sensor ………………………………….…………………. 29
Figure 21 Active and Passive Sensing modes used by piezoelectric materials …... 31
5
1.0 FATIGUE ANALYSIS
Fatigue is failure under a repeated or varying load, never reaching a high enough level to
cause failure in a single application. The fatigue process embraces two basic domains of
cyclic stressing or straining, differing distinctly in character. In each domain, failure occurs
by different physical mechanisms (ABAQUS Manual):
1. Low-cycle fatigue—where significant plastic straining occurs. Low-cycle fatigue
involves large cycles with significant amounts of plastic deformation and relatively
short life. The analytical procedure used to address strain-controlled fatigue is
commonly referred to as the Strain-Life, Crack-Initiation, or Critical Location
approach.
2. High-cycle fatigue—where stresses and strains are largely confined to the elastic
region. High-cycle fatigue is associated with low loads and long life. The Stress-Life
(S-N) or Total Life method is widely used for high-cycle fatigue applications—here the
applied stress is within the elastic range of the material and the number of cycles to
failure is large. While low-cycle fatigue is typically associated with fatigue life between
10 to 100,000 cycles, high-cycle fatigue is associated with life greater than 100,000
cycles.
Fatigue analysis refers to one of three methodologies: local strain or strain life, commonly
referred to as the crack initiation method, which is concerned only with crack initiation (E-
N, or sigma nominal); stress life, commonly referred to as total life (S-N, or nominal
stress); and crack growth or damage tolerance analysis, which is concerned with the
number of cycles until fracture.
6
The method for calculating fatigue life is sometimes called the Five Box Trick, including
material, loading, and geometry inputs, and analysis and results. The three main inputs for
fatigue life analyses are processed using various life estimation tools depending on whether
the analysis is for crack initiation, total life, or crack growth.
2.0 LOADING
Pun (2001) demonstrated that the proper specification of loading variation is extremely
important to achieve an accurate fatigue life prediction. The loading can be defined in
various manners and whether it is time-based, frequency-based or in the form of some sort
of spectra depends on the type of fatigue analysis. When working with finite element
models the loading can be force, pressure, temperature, displacement, or a number of other
types. The time history used in a fatigue calculation must be a representation of the time
variation in the loading applied in the Finite Element Analysis (FEA). For simple cases,
this implies a force-time history corresponding to a time variation in the point loading used
in the FEA. There are a number of different kinds of loading possible, each one requiring a
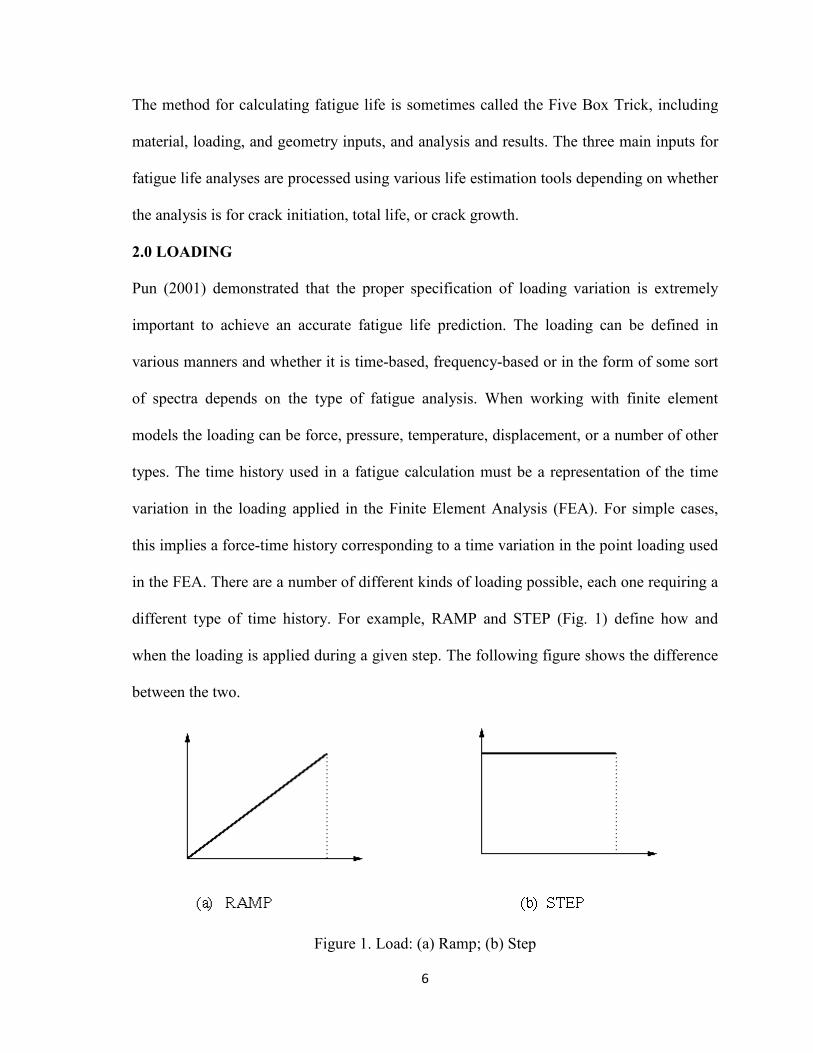
different type of time history. For example, RAMP and STEP (Fig. 1) define how and
when the loading is applied during a given step. The following figure shows the difference
between the two.
Figure 1. Load: (a) Ramp; (b) Step

7
3.0 MATERIAL PROPERTIES
Materials subjected to cyclic loading behave differently than under monotonic loading.
While monotonic material properties are the result of material tests where the load is
steadily increased until a test coupon breaks, cyclic material properties are obtained from
material stress where loading is reversed, then cycled until failure at various load levels.
Different types of cyclic material properties are required depending on the type of fatigue
analysis.
Because it can be difficult to gain access to measured cyclic properties, much effort has
been expended finding ways of relating monotonic properties to cyclic properties. The
approaches have all been empirical but do provide a means of estimating cyclic properties
that are otherwise expensive to generate.
The Ramberg–Osgood equation was created to describe the non linear relationship between
stress and strain—that is, the stress–strain curve—in materials near their yield points. It is
especially useful for metals that harden with plastic deformation (see strain hardening),
showing a smooth elastic-plastic transition.
In its original form, the equation for strain (deformation) is,
)1.........(..........................................................................................n
EK
E
+=
σσε
Where
ε is strain,
σ is stress,
E is Young's modulus, and
K and n are constants that depend on the material being considered.

The first term on the right side,
second term,n
EK
σ , accounts for the plastic part, the parameters
hardening behaviour of the material. Introducing the
defining a new parameter, α, related to
term on the extreme right side as follows:
n
O
On
EEK
=
σ
σσα
σ
Replacing in the first expression, the Ramberg
..........n
O
O
EE
+=
σ
σσα
σε
In the last form of the Ramberg
depends on the material constants
stress and plastic strain, the Ramberg
even for very low levels of stress. Nevertheless, for
commonly used value of the material constants α and n, the plastic strain remains
negligible compared to the elastic strain. On the other hand, for stress levels higher than σ
plastic strain becomes progressively larger
The value EOσα can be seen as a
that EO /)1( σαε += , when
Accordingly (Fig. 2):
Elastic strain at yield
Plastic strain at yield
8
term on the right side, Eσ , is equal to the elastic part of the strain
, accounts for the plastic part, the parameters K and
of the material. Introducing the yield strength of the material, σ
defining a new parameter, α, related to K as1−
=
nO
EK
σα , it is convenient to rewrite the
term on the extreme right side as follows:
................................................................................n
Replacing in the first expression, the Ramberg–Osgood equation can be written as
................................................................................
In the last form of the Ramberg–Osgood model, the hardening behavior
depends on the material constants and . Due to the power-law relationship between
stress and plastic strain, the Ramberg–Osgood model implies that plastic strain is present
even for very low levels of stress. Nevertheless, for low applied stresses and for the
value of the material constants α and n, the plastic strain remains
negligible compared to the elastic strain. On the other hand, for stress levels higher than σ
plastic strain becomes progressively larger than elastic strain.
can be seen as a yield offset, as shown in Fig. 2. This comes from the
when Oσσ = .
lastic strain at yield = EO /σ
lastic strain at yield = )/( EOσα = yield offset
, is equal to the elastic part of the strain. While the
and n describing the
of the material, σ0, and
it is convenient to rewrite the
)2.(....................
Osgood equation can be written as
)3......(....................
hardening behavior of the material
relationship between
Osgood model implies that plastic strain is present
low applied stresses and for the
value of the material constants α and n, the plastic strain remains
negligible compared to the elastic strain. On the other hand, for stress levels higher than σ0,
. This comes from the fact
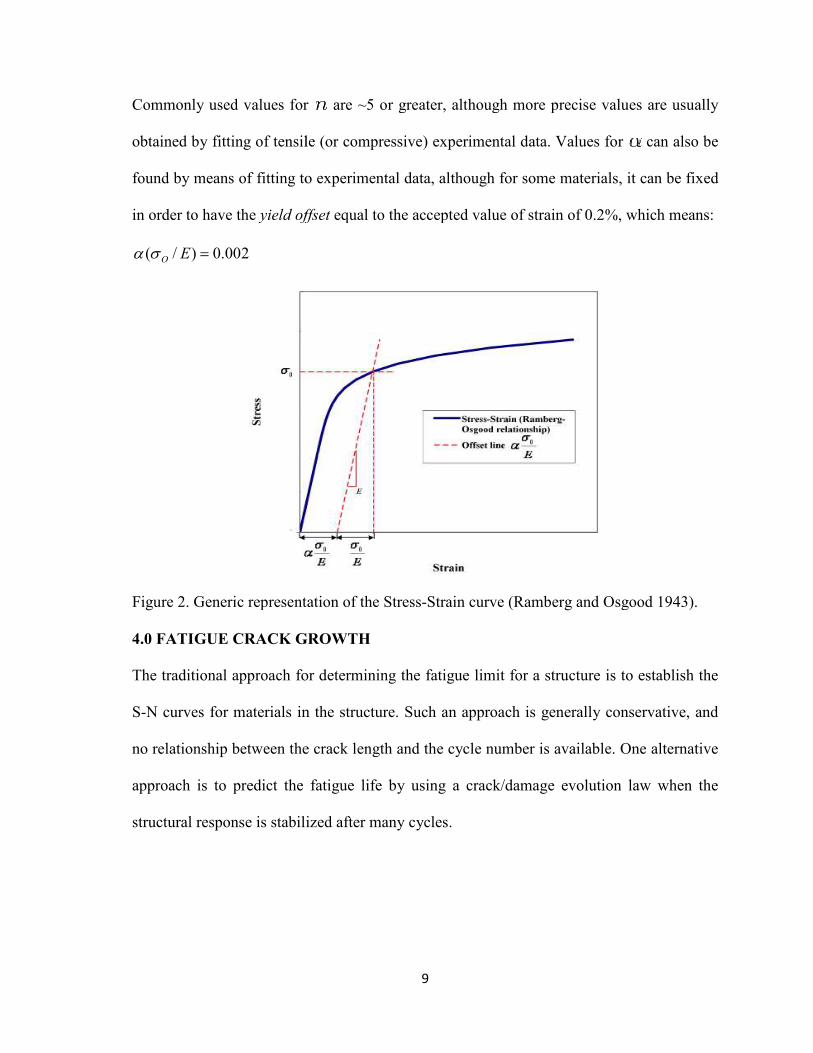
Commonly used values for
obtained by fitting of tensile (or compressive) experimental data. Values for
found by means of fitting to experimental data, although for some materials, it can be fixed
in order to have the yield offset
002.0)/( =EOσα
Figure 2. Generic representation of the Stress
4.0 FATIGUE CRACK GROWTH
The traditional approach for
S-N curves for materials in the structure. Such an approach is generally conservative, and
no relationship between the crack length and the cycle number is available. One alternative
approach is to predict the fatigue
structural response is stabilized after many cycles.
9
Commonly used values for are ~5 or greater, although more precise values are usually
obtained by fitting of tensile (or compressive) experimental data. Values for
found by means of fitting to experimental data, although for some materials, it can be fixed
yield offset equal to the accepted value of strain of 0.2%, which means:
Generic representation of the Stress-Strain curve (Ramberg and Osgood
FATIGUE CRACK GROWTH
The traditional approach for determining the fatigue limit for a structure is to establish the
N curves for materials in the structure. Such an approach is generally conservative, and
between the crack length and the cycle number is available. One alternative
h is to predict the fatigue life by using a crack/damage evolution law when the
structural response is stabilized after many cycles.
are ~5 or greater, although more precise values are usually
obtained by fitting of tensile (or compressive) experimental data. Values for can also be
found by means of fitting to experimental data, although for some materials, it can be fixed
equal to the accepted value of strain of 0.2%, which means:
Osgood 1943).
determining the fatigue limit for a structure is to establish the
N curves for materials in the structure. Such an approach is generally conservative, and
between the crack length and the cycle number is available. One alternative
life by using a crack/damage evolution law when the
10
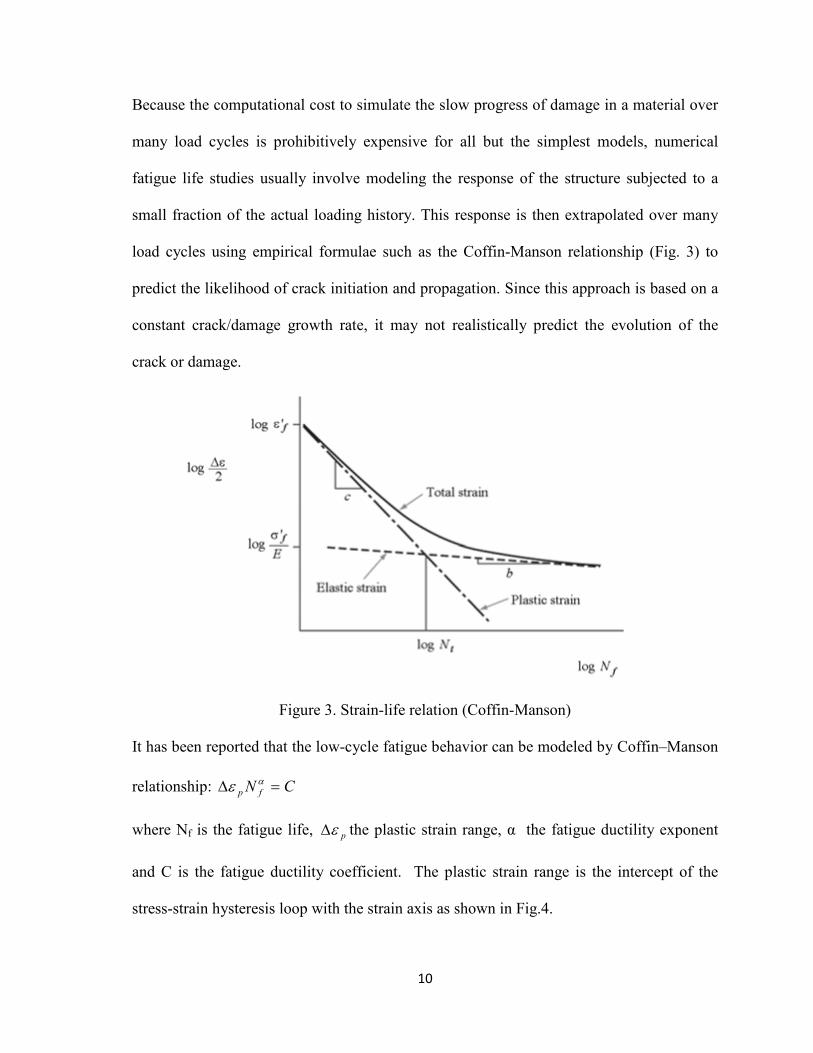
Because the computational cost to simulate the slow progress of damage in a material over
many load cycles is prohibitively expensive for all but the simplest models, numerical
fatigue life studies usually involve modeling the response of the structure subjected to a
small fraction of the actual loading history. This response is then extrapolated over many
load cycles using empirical formulae such as the Coffin-Manson relationship (Fig. 3) to
predict the likelihood of crack initiation and propagation. Since this approach is based on a
constant crack/damage growth rate, it may not realistically predict the evolution of the
crack or damage.
Figure 3. Strain-life relation (Coffin-Manson)
It has been reported that the low-cycle fatigue behavior can be modeled by Coffin–Manson
relationship: CN fp =∆ αε
where Nf is the fatigue life, pε∆ the plastic strain range, α the fatigue ductility exponent
and C is the fatigue ductility coefficient. The plastic strain range is the intercept of the
stress-strain hysteresis loop with the strain axis as shown in Fig.4.
11
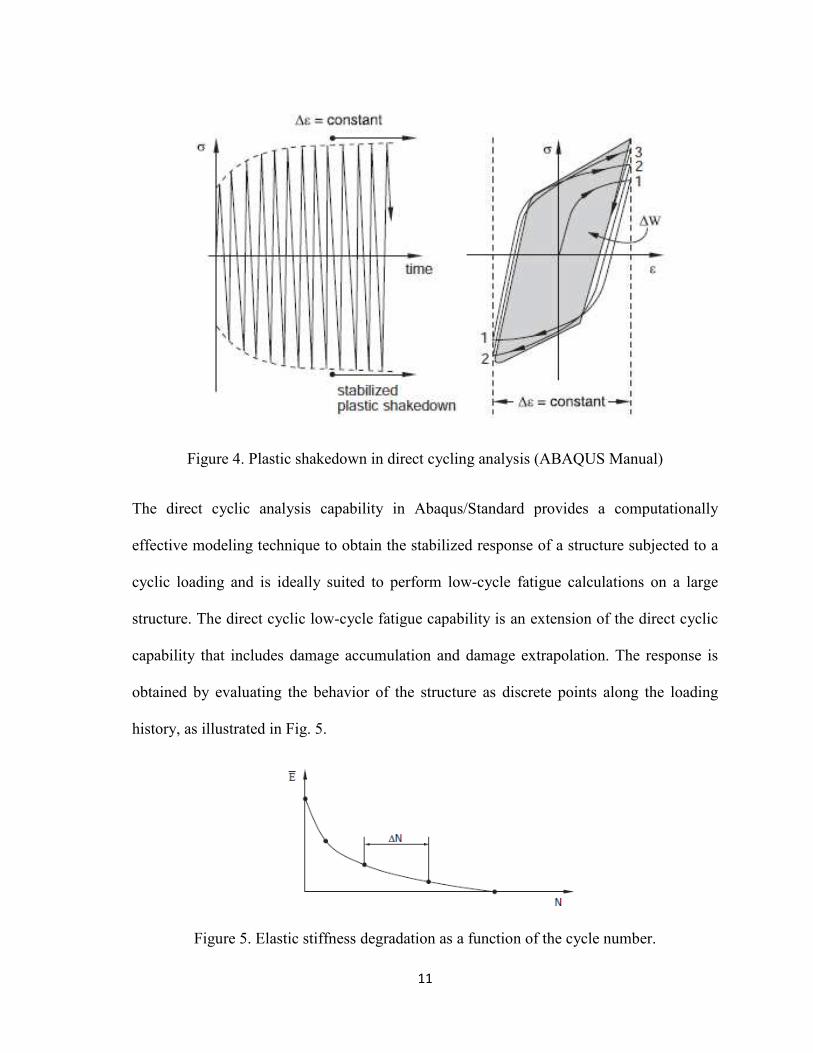
Figure 4. Plastic shakedown in direct cycling analysis (ABAQUS Manual)
The direct cyclic analysis capability in Abaqus/Standard provides a computationally
effective modeling technique to obtain the stabilized response of a structure subjected to a
cyclic loading and is ideally suited to perform low-cycle fatigue calculations on a large
structure. The direct cyclic low-cycle fatigue capability is an extension of the direct cyclic
capability that includes damage accumulation and damage extrapolation. The response is
obtained by evaluating the behavior of the structure as discrete points along the loading
history, as illustrated in Fig. 5.
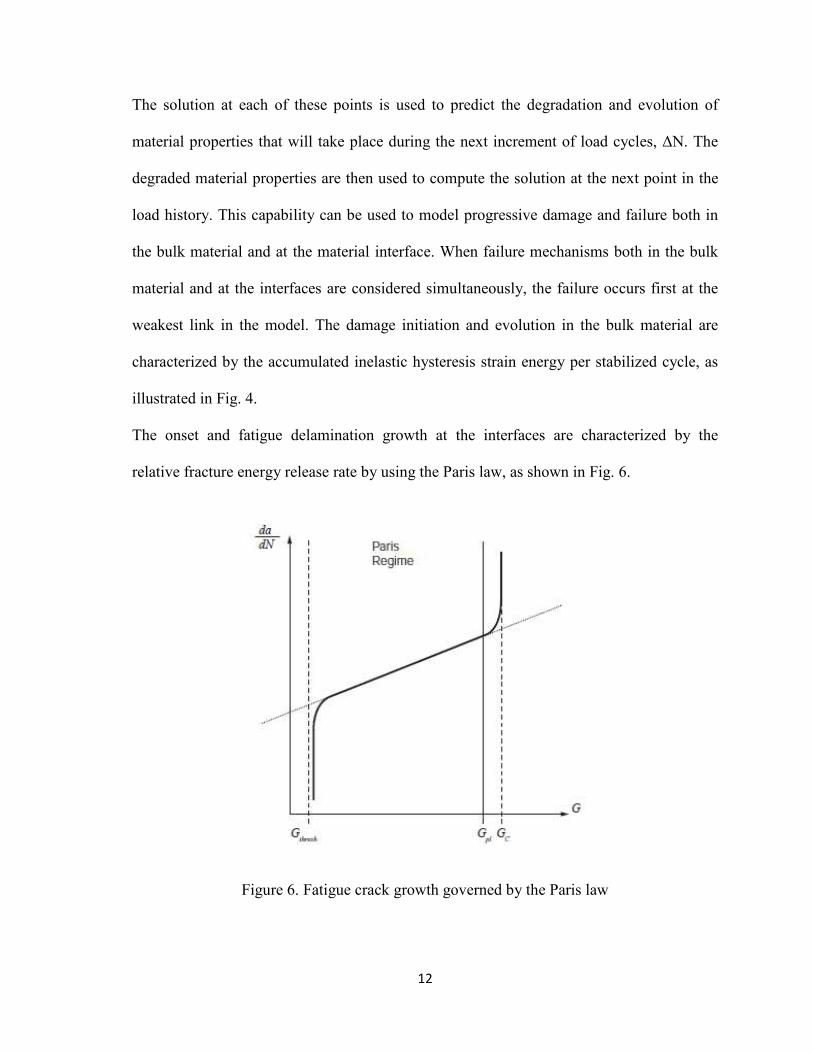
Figure 5. Elastic stiffness degradation as a function of the cycle number.
12
The solution at each of these points is used to predict the degradation and evolution of
material properties that will take place during the next increment of load cycles, ∆N. The
degraded material properties are then used to compute the solution at the next point in the
load history. This capability can be used to model progressive damage and failure both in
the bulk material and at the material interface. When failure mechanisms both in the bulk
material and at the interfaces are considered simultaneously, the failure occurs first at the
weakest link in the model. The damage initiation and evolution in the bulk material are
characterized by the accumulated inelastic hysteresis strain energy per stabilized cycle, as
illustrated in Fig. 4.
The onset and fatigue delamination growth at the interfaces are characterized by the
relative fracture energy release rate by using the Paris law, as shown in Fig. 6.
Figure 6. Fatigue crack growth governed by the Paris law

13
For linear elastic materials, Griffith’sapproach says that a crack extends if the
thermodynamic crack driving force, characterized by the energy release rate G (Fig. 6),
becomes equal or larger than the crack growth resistance, R (Griffith, 1921), whereas the
Irwin (1957) approach postulates that a crack grows when the crack tip stress intensity
factor K reaches a critical value Kc (Fig. 7). The Griffith and Irwin criteria are equivalent
for linear elastic materials, since energy release rate and stress intensity factor are related.
Crack tip conditions are defined by a single parameter, such as stress intensity factor.
Under cyclic constant amplitude stress intensity, the crack growth rate for small plastic
zones at the crack tip is defined by: ���� � ���� � where,
∆K cycles between Kmax – Kmin
R = Kmin / Kmax=Smin/Smax
da/dN = crack growth rate per cycle, L(cycle)-1
In field-situations, a history dependent factor is added into the function to account for
previous loading conditions during service-life of the element. The similitude assumption
shown for crack growth rate does not take into account occasional overloads and/or under
loads which will turn the problem into a variable amplitude loading configuration. Since
the stress intensity factor cannot characterize excessive plasticity at crack tip, researchers
proposed that crack growth be a function of J-integral. For fatigue resulting in large-scale
yielding, the ∆J value will be employed and is analogous from monotonic loading.
Fatigue crack propagation curve (log da/dN–log ∆K) may be divided into three stages
which are typical for: short crack growth propagation stage (Region I), long crack
propagation (Region II), and fracture stage (Region III) (Fig. 5). Where the behavior of the
14
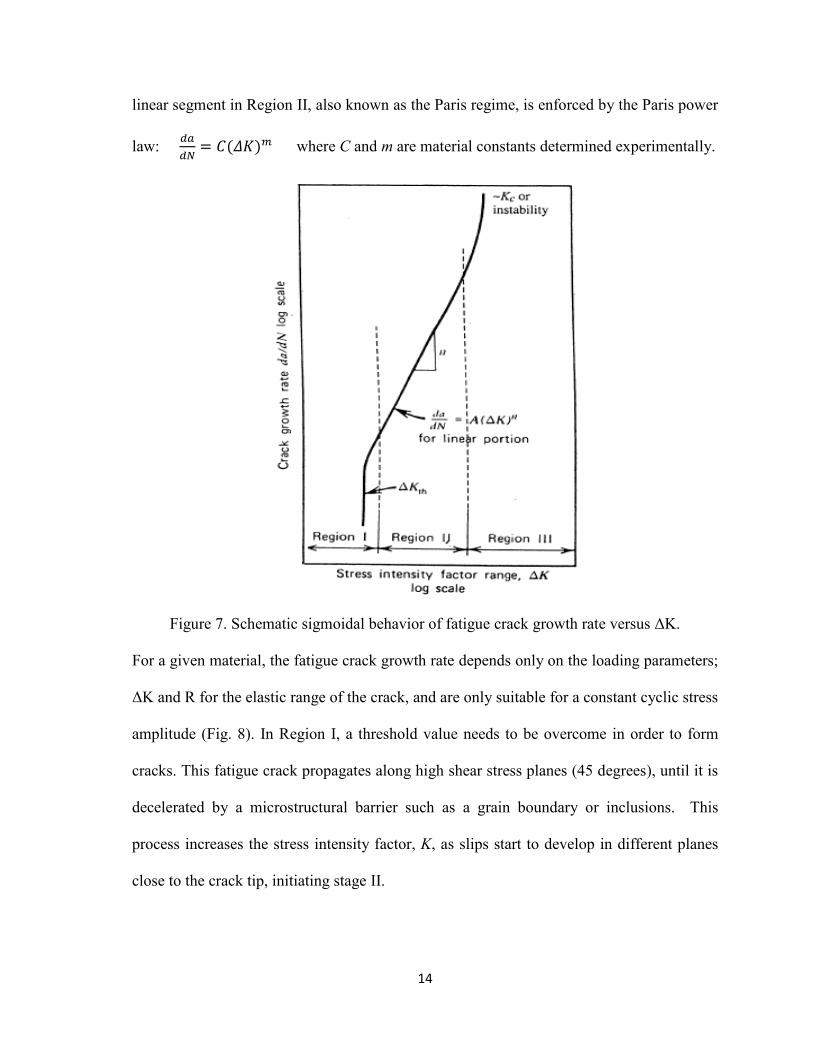
linear segment in Region II, also known as the Paris regime, is enforced by the Paris power
law: ���� � ����� where C and m are material constants determined experimentally.
Figure 7. Schematic sigmoidal behavior of fatigue crack growth rate versus ∆K.
For a given material, the fatigue crack growth rate depends only on the loading parameters;
∆K and R for the elastic range of the crack, and are only suitable for a constant cyclic stress
amplitude (Fig. 8). In Region I, a threshold value needs to be overcome in order to form
cracks. This fatigue crack propagates along high shear stress planes (45 degrees), until it is
decelerated by a microstructural barrier such as a grain boundary or inclusions. This
process increases the stress intensity factor, K, as slips start to develop in different planes
close to the crack tip, initiating stage II.
15
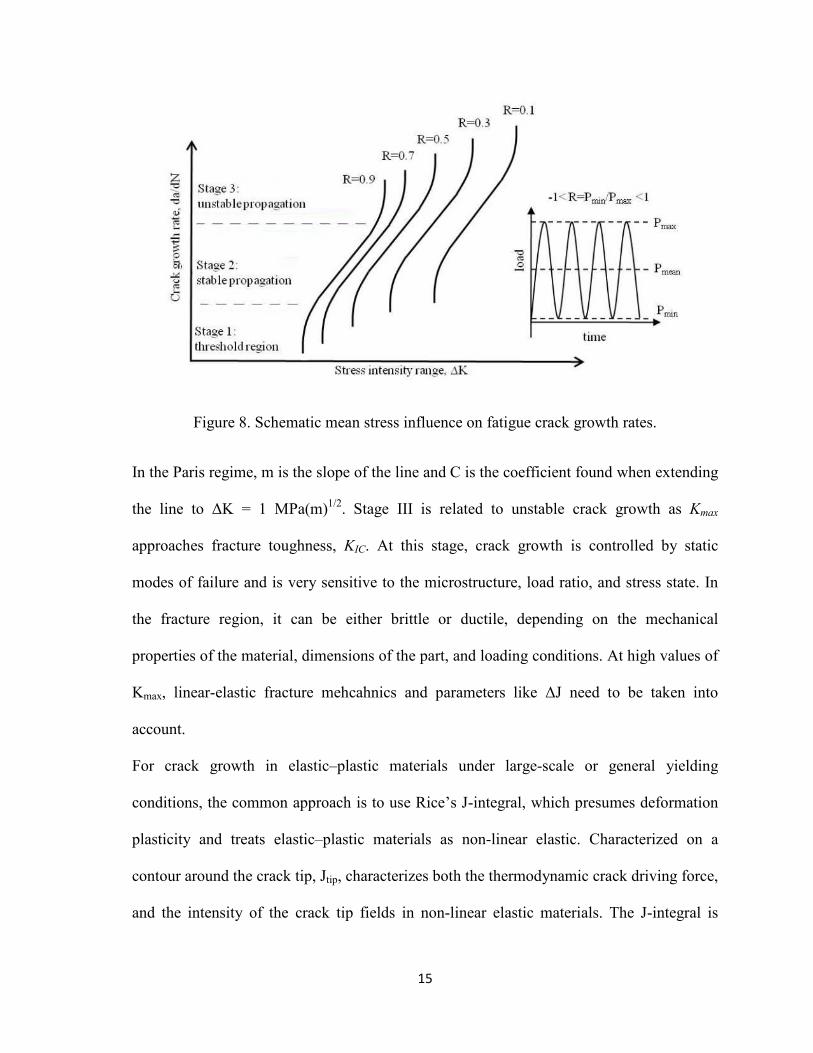
Figure 8. Schematic mean stress influence on fatigue crack growth rates.
In the Paris regime, m is the slope of the line and C is the coefficient found when extending
the line to ∆K = 1 MPa(m)1/2. Stage III is related to unstable crack growth as Kmax
approaches fracture toughness, KIC. At this stage, crack growth is controlled by static
modes of failure and is very sensitive to the microstructure, load ratio, and stress state. In
the fracture region, it can be either brittle or ductile, depending on the mechanical
properties of the material, dimensions of the part, and loading conditions. At high values of
Kmax, linear-elastic fracture mehcahnics and parameters like ∆J need to be taken into
account.
For crack growth in elastic–plastic materials under large-scale or general yielding
conditions, the common approach is to use Rice’s J-integral, which presumes deformation
plasticity and treats elastic–plastic materials as non-linear elastic. Characterized on a
contour around the crack tip, Jtip, characterizes both the thermodynamic crack driving force,
and the intensity of the crack tip fields in non-linear elastic materials. The J-integral is
16
independent of the contour used to evaluate it, so Jtip = Jfar where Jfar is the integral on a
contour in the far-field. This path independence is important, since the energy released at
the crack tip (Jtip) cannot be easily measured, whereas the total energy released during
crack extension in a body (Jfar) can be readily measured.
In homogeneous elastic materials, Jtip is identical to the total energy released in the
specimen per unit crack extension, whereas this is not so in elastic–plastic materials due to
the dissipation in the plastic zone which induces the plasticity influence term, Cp, defined
as the total configurationally force due to plasticity, projected on the crack growth
direction. For deformation plasticity, the plasticity influence term Cp vanishes in the
context of deformation plasticity, whereas the crack driving force Jtip vanishes for rigid
plasticity.
An experimental study on C(T) specimens to examine the influence of plastic deformation
near the crack tip was performed on annealed mild steel with a Young’s modulus of 200
GPa. Loading was simulated by prescribing the load line displacement νll assuming plane
strain conditions. The far-field J-integral values are compared to ABAQUS values
calculated using the virtual crack extension and to experimental values determined from the
area below the load vs. load-line displacement curve (Rice, 1973). Results showed that the
configurational body force arises only due to plastic deformation and is large directly at the
crack tip for homogeneous material. From the calculated plastic zone of 2 mm, the
configurational force rapidly decreases to zero at a distance less than 2 mm. Abaqus
showed that a plastic deformation starts at the back face of the specimen for νll=0.2 mm (a)
and as it increases to 0.343 mm (b) and 0.352 mm (c) show that with increasing loading,
both the crack tip plastic zone and the region of remote plasticity expand. The two regions

17
eventually merge and general yielding ocurrs in the ligament. J-integral Jtip is the scalar
driving force on a crack tip in elastic–plastic materials.
After an extensive analysis performed on the behavior of the J-integral for different cases,
it was concluded that the scalar driving force at the crack tip of an elastic-plastic material is
defined as Jtip. The crack driving force, Jtip, is equal to the sum of the global driving force
Jfar and the plasticity influence term Cp, therefore Jtip = Jfar+Cp. It was also found that the J-
integral is path-independent in homogenous elastic bodies due to the fact that
configurational body forces disappear, but in elastic-plastic bodies these forces are present
and depend on the plastic strain gradient. This makes the J-integral path dependent in
incrementally plastic materials.
Courtin (2005) studied the crack opening displacement extrapolation method and the J-
integral approach applied to ABAQUS finite element models. The results obtained by these
various means on CT specimens and cracked round bars are in good agreement with those
found in the literature. The J-integral calculation relies as a good technique to deal with
since no knowledge of the crack-tip field is required. In the heart of the body, as one can
assume a plane strain state, the expression on the crack lips (θ = Π), where u is the angular
displacement, ν is Poisson’s ratio, and r is the radial distance from crack-tip is defined by:
�� �� �����������
� ���
An energetic approaching introduced by Rice (1974) to calculate a two-dimensional line
for determining the J-integral is seen in the equation below:
� � �� ���� ! " #�#$% ��&� where U is the strain energy density, t is the stress vector, d is the displacement vector and
ds is the element of arc along the path. The contour Γ begins on the lower crack surface and
18
ends on the upper crack surface, traveling counterclockwise.
For a C(T) specimen governed by a stress intensity factor K which is function of: applied
load P, thickness B, W is the characteristic length and a is the crack length, the meshed
figure from ABAQUS for the upper half of the sample along with a schematic of the
definitions may be seen in Fig. 18. ABAQUS highlights the possibility of calculating stress
intensity distribution by employing an energetic approach which calculates the J-integral
values on contours surrounding the crack tip. After during an experimental study with C(T)
samples and round bars; the J-integral method may be applied automatically with the
ABAQUS code and results suitable to deal with the fatigue growth of general cracks.
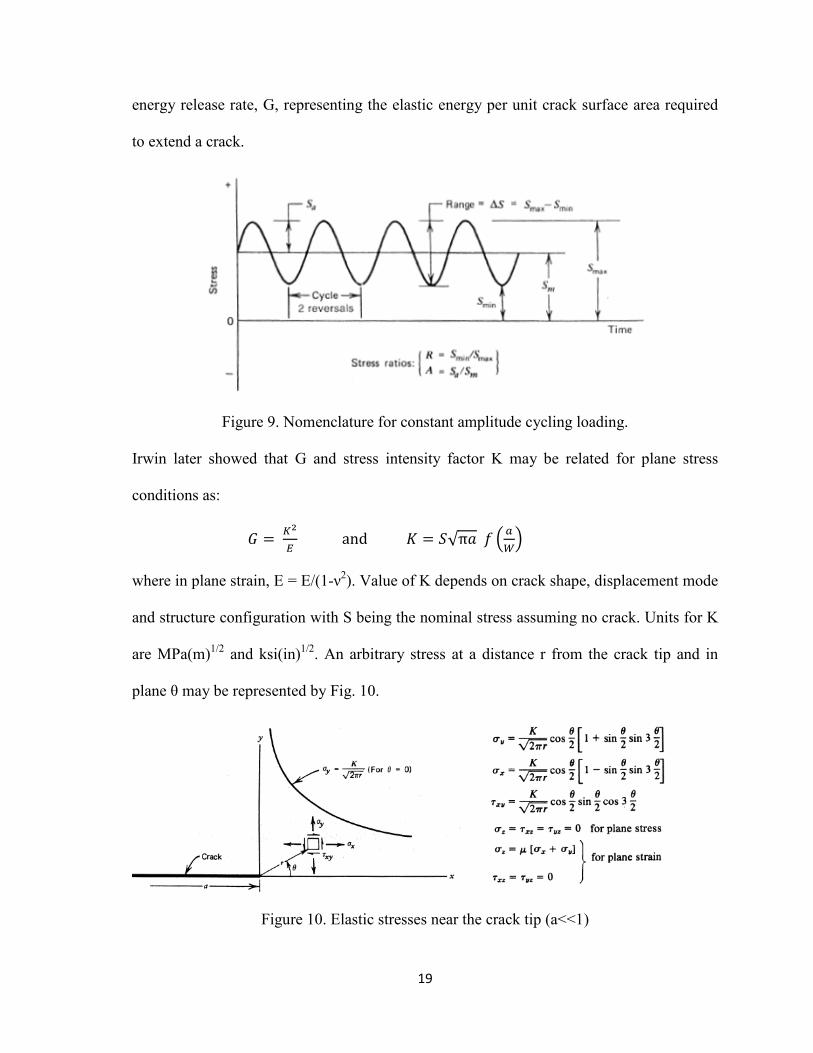
For design of parts under fatigue, constant amplitude loading is usually utilized (Stephens
et al. 2001), where the loading depends on the R-ratio value (Fig. 9); for fully reversed
bending R=-1, for pulsating tension R=0. In the first case, the minimum and maximum
stresses are equal in magnitude and opposite in sign. For the latter case, the minimum stress
is equal to zero. From these tests a fatigue-life curve (S-N) and consequently, an estimation
of remaining life may be obtained; and will be influenced by the microstructure, size,
surface finish and cycling frequency.
It should be noted that cyclic loading can cause strain hardening/softening of a material.
Low strength metals will tend to harden, whereas high strength metals with low ductility
will soften. The application of linear-elastic fracture mechanics (LEFM) evaluates the
strength of a component in the presence of a crack under the assumption that materials
behave predominantly elastic during the fatigue process.
Griffith demonstrated that crack extension in brittle materials was governed by the far-field
stress, material properties and the root of crack length. The concept was recognized as the
19
energy release rate, G, representing the elastic energy per unit crack surface area required
to extend a crack.
Figure 9. Nomenclature for constant amplitude cycling loading.
Irwin later showed that G and stress intensity factor K may be related for plane stress
conditions as:
' � �(�� ������������)*+������������ � ,-./��� 0�12�
where in plane strain, E = E/(1-ν2). Value of K depends on crack shape, displacement mode
and structure configuration with S being the nominal stress assuming no crack. Units for K
are MPa(m)1/2 and ksi(in)1/2. An arbitrary stress at a distance r from the crack tip and in
plane θ may be represented by Fig. 10.
Figure 10. Elastic stresses near the crack tip (a<<1)
20
It must be specified that the use of LEFM is restricted to small plastic zones at crack tip.
Stress intensity factors for different loading types inside the same mode may be added
together by using superposition, whereas K values for different modes (mode I, II, III)
cannot be added.
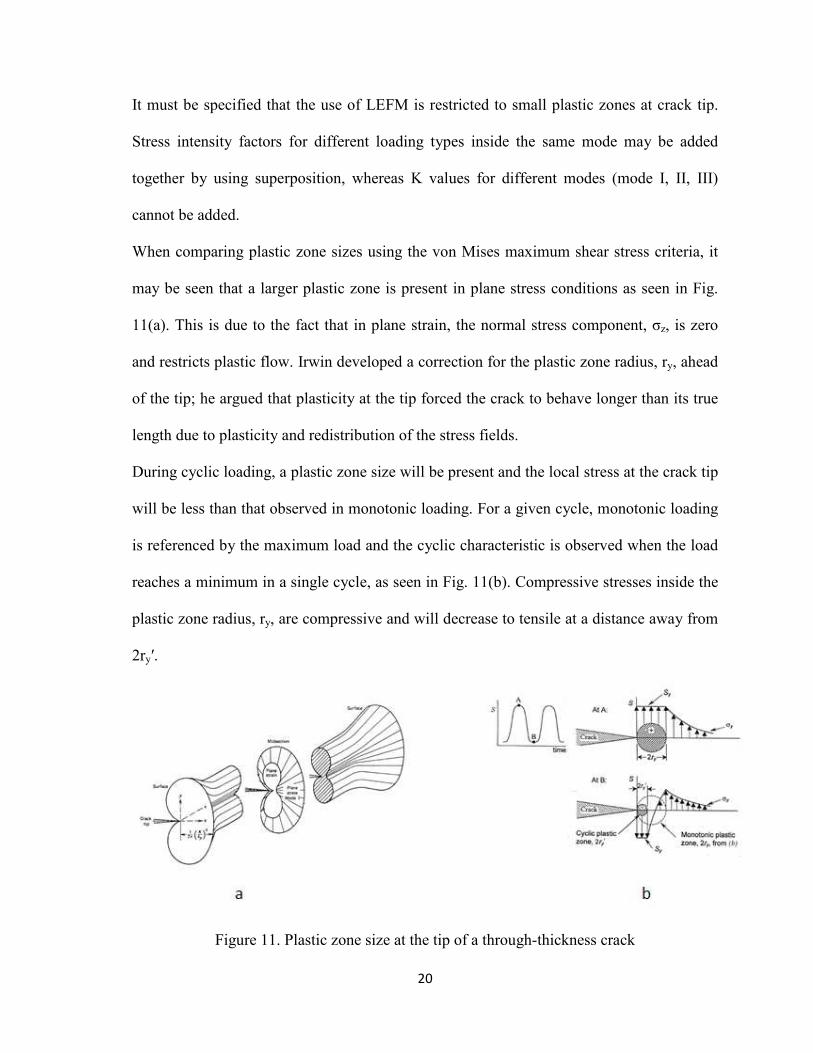
When comparing plastic zone sizes using the von Mises maximum shear stress criteria, it
may be seen that a larger plastic zone is present in plane stress conditions as seen in Fig.
11(a). This is due to the fact that in plane strain, the normal stress component, σz, is zero
and restricts plastic flow. Irwin developed a correction for the plastic zone radius, ry, ahead
of the tip; he argued that plasticity at the tip forced the crack to behave longer than its true
length due to plasticity and redistribution of the stress fields.
During cyclic loading, a plastic zone size will be present and the local stress at the crack tip
will be less than that observed in monotonic loading. For a given cycle, monotonic loading
is referenced by the maximum load and the cyclic characteristic is observed when the load
reaches a minimum in a single cycle, as seen in Fig. 11(b). Compressive stresses inside the
plastic zone radius, ry, are compressive and will decrease to tensile at a distance away from
2ry′.
Figure 11. Plastic zone size at the tip of a through-thickness crack
21
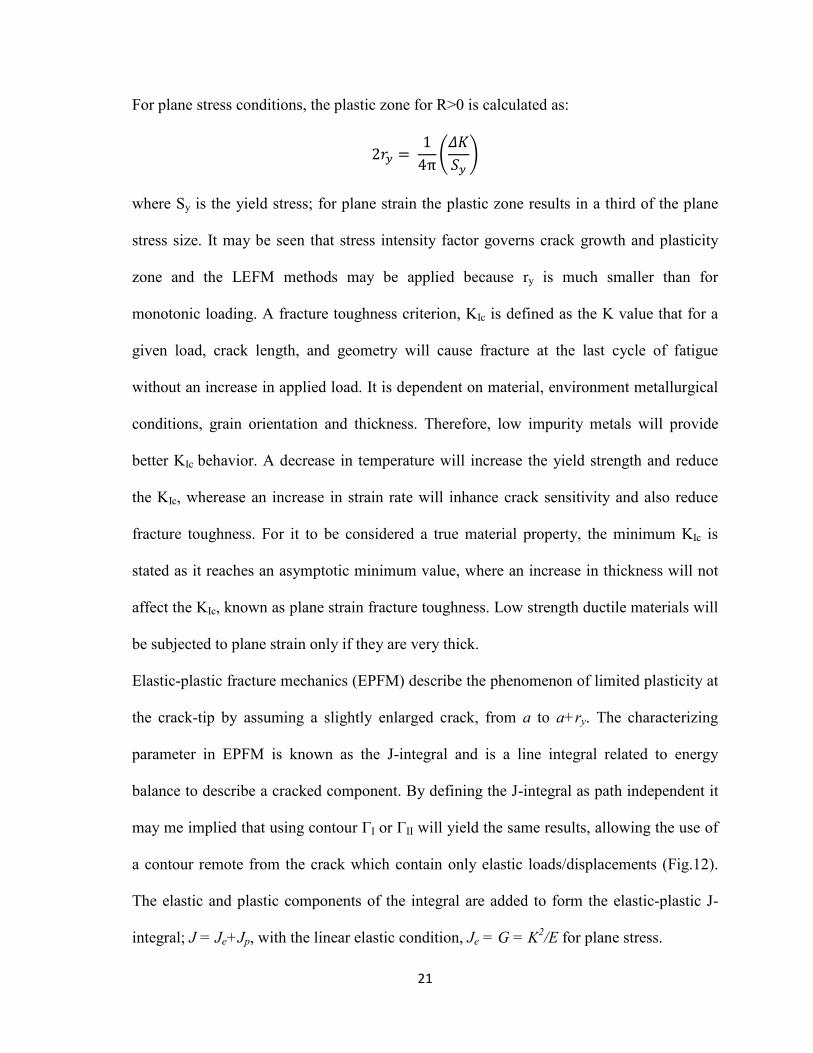
For plane stress conditions, the plastic zone for R>0 is calculated as:
345 �� 67.8��,5 9
where Sy is the yield stress; for plane strain the plastic zone results in a third of the plane
stress size. It may be seen that stress intensity factor governs crack growth and plasticity
zone and the LEFM methods may be applied because ry is much smaller than for
monotonic loading. A fracture toughness criterion, KIc is defined as the K value that for a
given load, crack length, and geometry will cause fracture at the last cycle of fatigue
without an increase in applied load. It is dependent on material, environment metallurgical
conditions, grain orientation and thickness. Therefore, low impurity metals will provide
better KIc behavior. A decrease in temperature will increase the yield strength and reduce
the KIc, wherease an increase in strain rate will inhance crack sensitivity and also reduce
fracture toughness. For it to be considered a true material property, the minimum KIc is
stated as it reaches an asymptotic minimum value, where an increase in thickness will not
affect the KIc, known as plane strain fracture toughness. Low strength ductile materials will
be subjected to plane strain only if they are very thick.
Elastic-plastic fracture mechanics (EPFM) describe the phenomenon of limited plasticity at
the crack-tip by assuming a slightly enlarged crack, from a to a+ry. The characterizing
parameter in EPFM is known as the J-integral and is a line integral related to energy
balance to describe a cracked component. By defining the J-integral as path independent it
may me implied that using contour ΓI or ΓII will yield the same results, allowing the use of
a contour remote from the crack which contain only elastic loads/displacements (Fig.12).
The elastic and plastic components of the integral are added to form the elastic-plastic J-
integral; J = Je+Jp, with the linear elastic condition, Je = G = K2/E for plane stress.

22
Figure 12. Line contour surrounding a crack tip for J-integral formulation.
A series of parameters have been investigated to relate crack growth under mixed mode
loading conditions. Experimental studies show that cracks with a small plastic zone will be
dictated by the alternating stresses pulling the crack surfaces apart; whereas in high
plasticity materials, crack growth have shown to be dependent also of the stresses parallel
to the crack plane. Energy release rates for planar crack under plane stress for mixed
loading: ' � '� : '�� : '��� Tanaka proposed an equivalent stress intensity factor range, ∆Kq, that when combined with
the above equation yields: ��; � ����� : ����� : ���������6 : <�
23
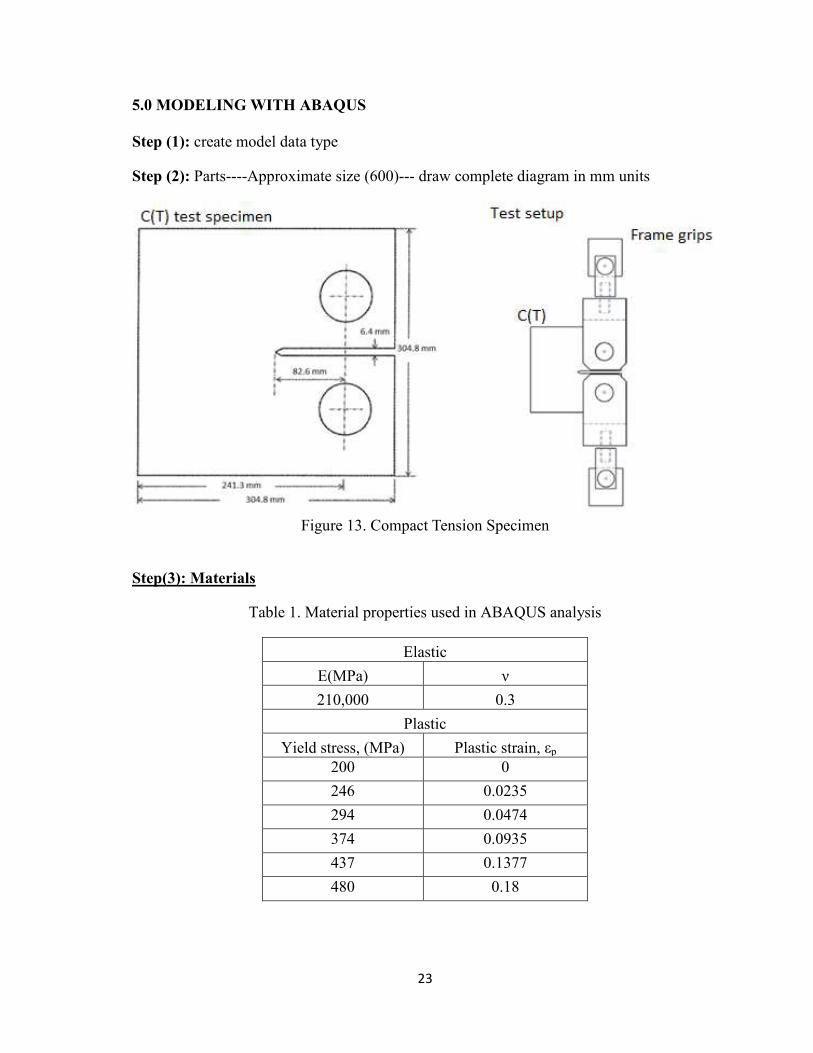
5.0 MODELING WITH ABAQUS
Step (1): create model data type
Step (2): Parts----Approximate size (600)--- draw complete diagram in mm units
Figure 13. Compact Tension Specimen
Step(3): Materials
Table 1. Material properties used in ABAQUS analysis
Elastic
E(MPa) ν
210,000 0.3
Plastic
Yield stress, (MPa) Plastic strain, εp 200 0
246 0.0235
294 0.0474
374 0.0935
437 0.1377
480 0.18
24
STEP (4): SECTION
Create section----shell---homogenious—continue—shell thickness 18.25 mm
STEP (5): SECTION ASSIGNMENT
Select whole section and click ok.
STEP (6): CREATE PARTITION
Partition face: Sketch---Select face +Auto calculate (done) ---select a plane—select point---
double click on a point
Step (7): Assembly
Instances-- dependent
Step (8): Steps
Steps---Double click
Step (9): Field output request
Right click—select manager—Edit
Step (10): History output request
Right click—select manager—Edit
Step (11): BC
Fixed: upper hole: U1=0, U2= 0 and UR3=0
Step (12): Load
Pressure load
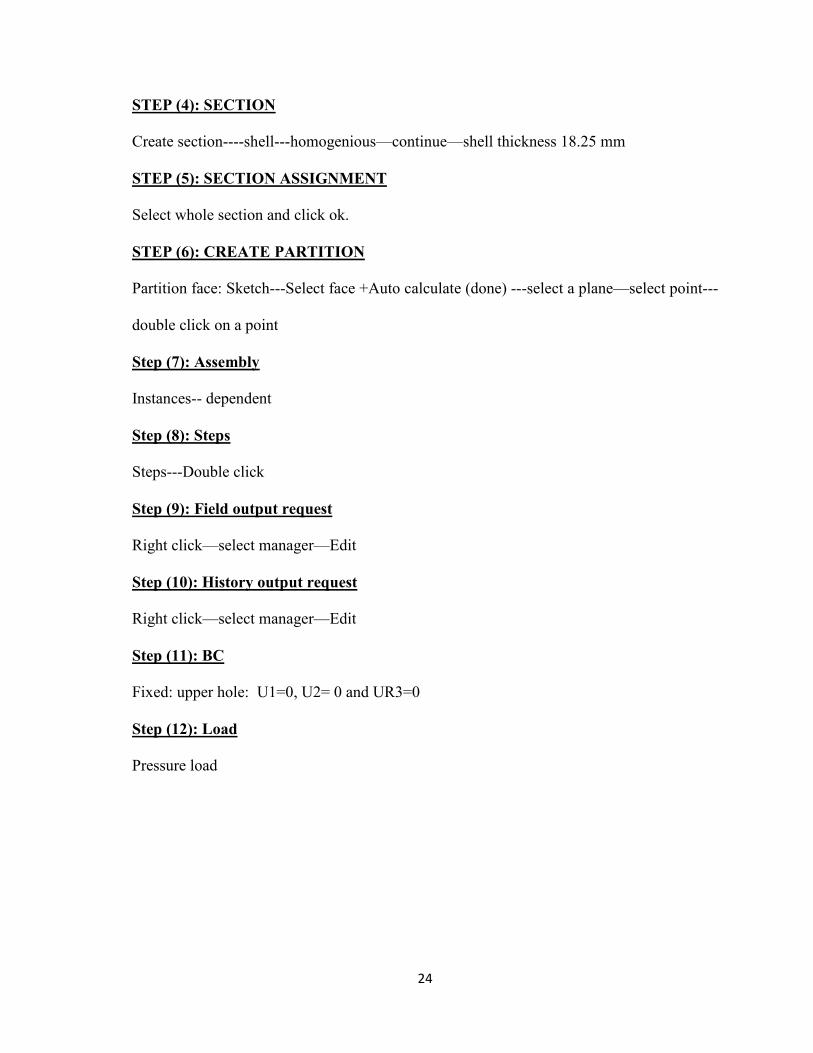
25
Figure 14. Cycling load
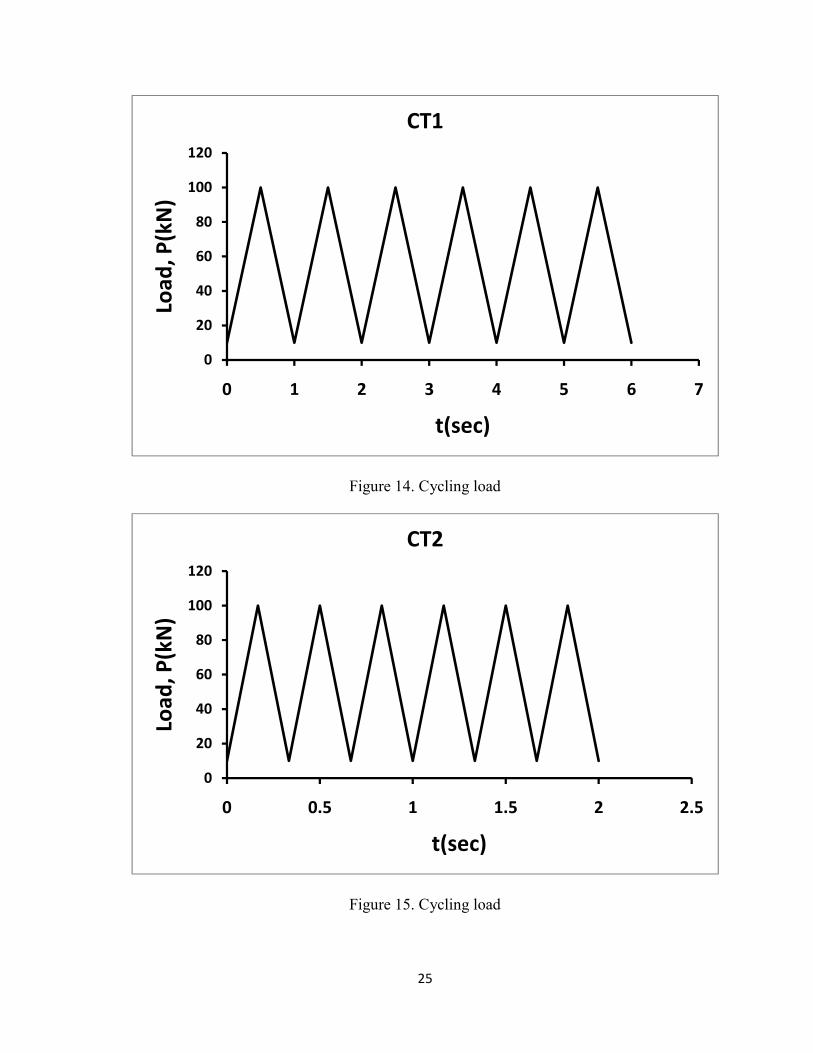
Figure 15. Cycling load
0
20
40
60
80
100
120
0 1 2 3 4 5 6 7
Load
, P(k
N)
t(sec)
CT1
0
20
40
60
80
100
120
0 0.5 1 1.5 2 2.5
Load
, P(k
N)
t(sec)
CT2
26
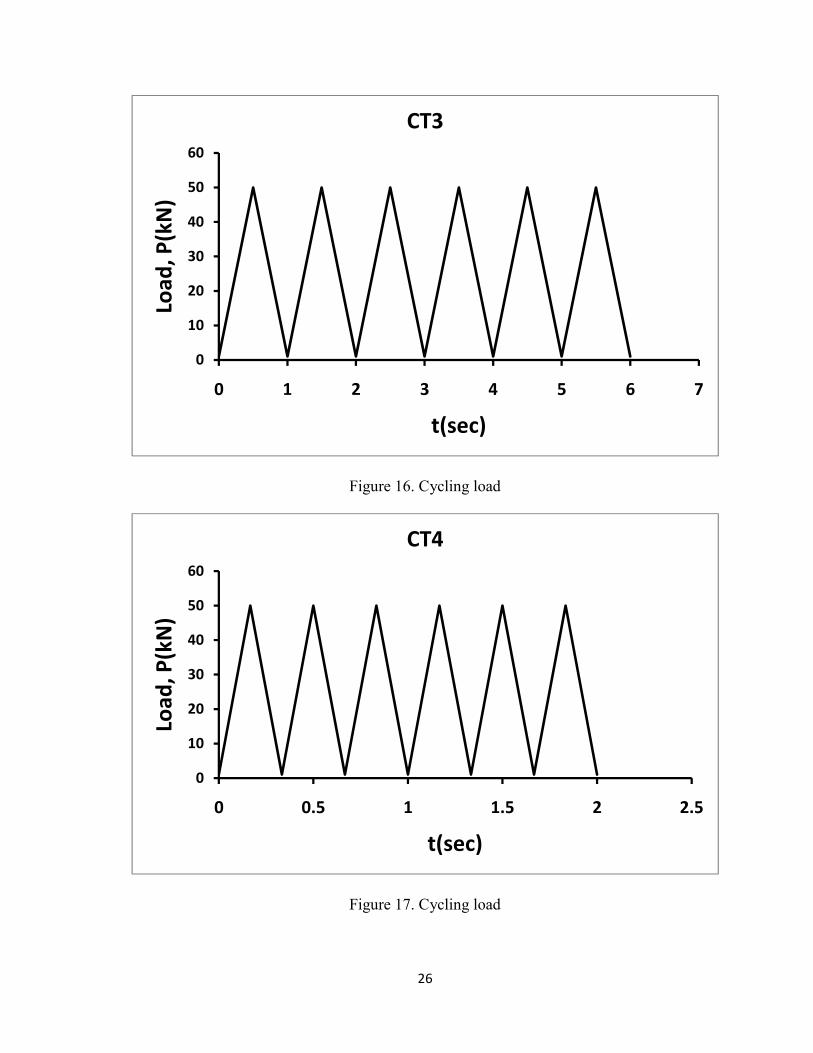
Figure 16. Cycling load
Figure 17. Cycling load
0
10
20
30
40
50
60
0 1 2 3 4 5 6 7
Load
, P(k
N)
t(sec)
CT3
0
10
20
30
40
50
60
0 0.5 1 1.5 2 2.5
Load
, P(k
N)
t(sec)
CT4
27
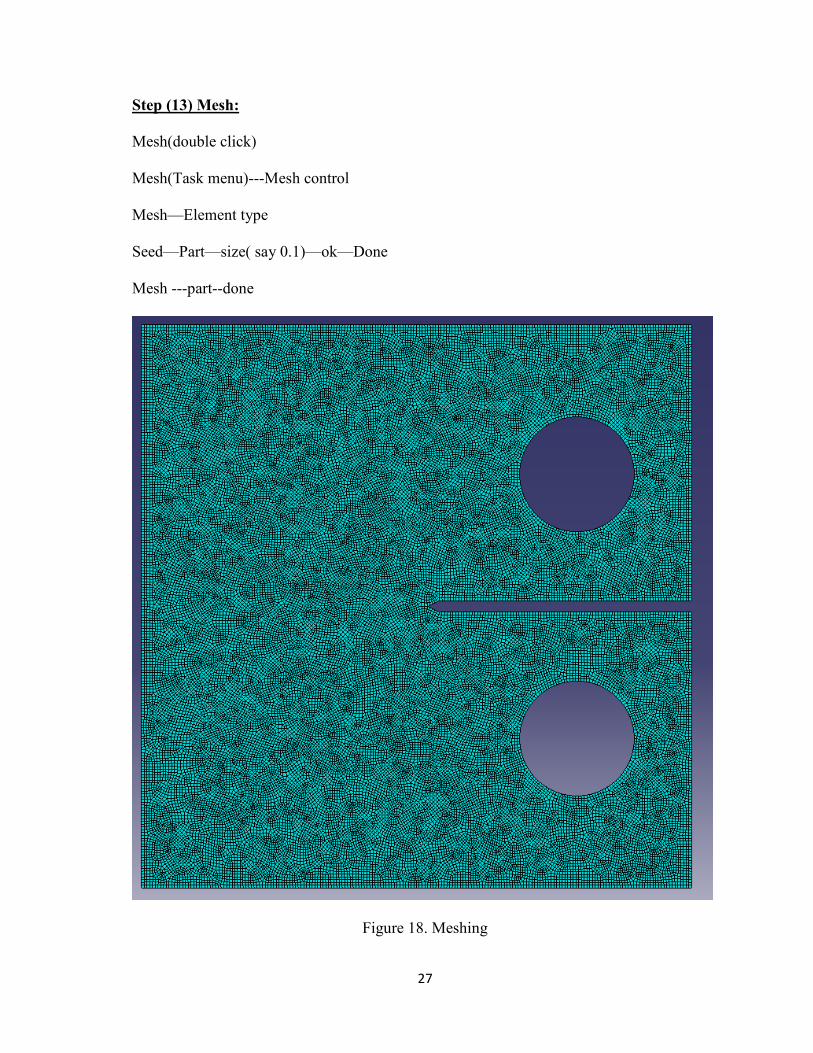
Step (13) Mesh:
Mesh(double click)
Mesh(Task menu)---Mesh control
Mesh—Element type
Seed—Part—size( say 0.1)—ok—Done
Mesh ---part--done
Figure 18. Meshing
28
Step(14): Jobs
---Create job
---Submit jobs
---Monitor
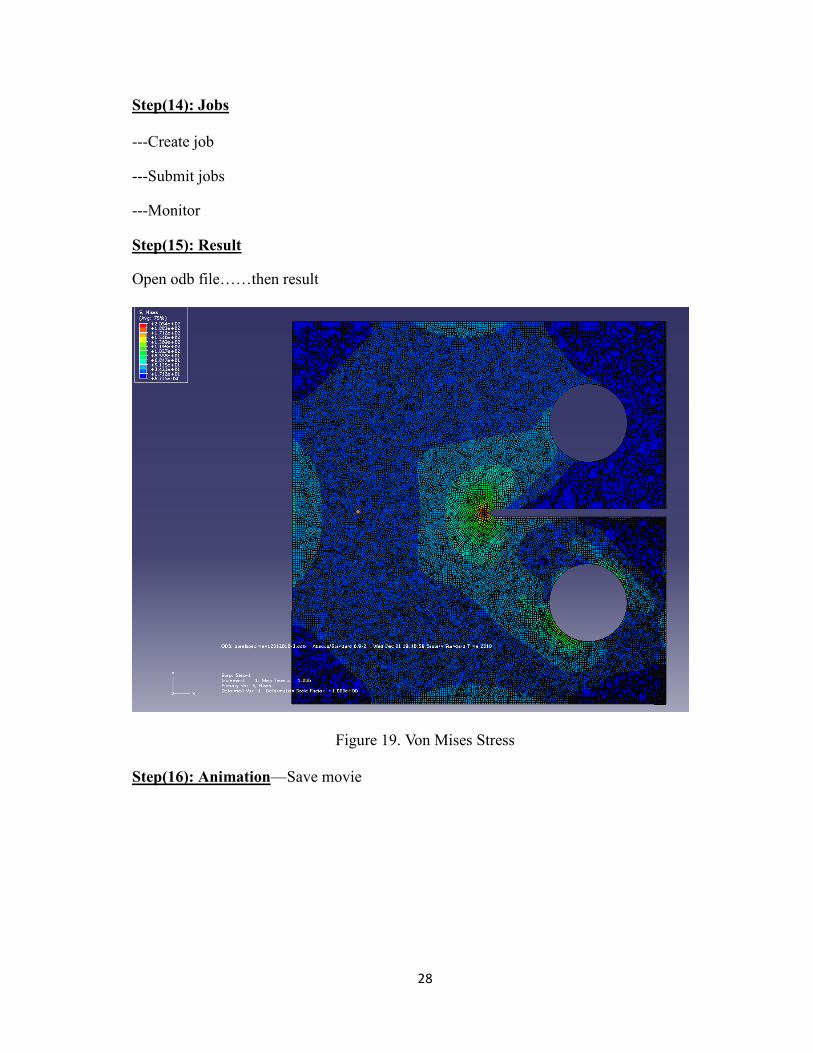
Step(15): Result
Open odb file……then result
Figure 19. Von Mises Stress
Step(16): Animation—Save movie
29
6.0 FUTURE STUDY
The performance and behavior characteristics of nearly all in-service structures can be
affected by damage resulting from external conditions such as weather, impact, loading
abrasion, operator abuse, or neglect (Bear et al., 2005). These factors can have serious
consequences on the in-service structures as related to safety, cost, and operational
capability. Therefore, the timely and accurate detection, characterization and monitoring of
structural cracking, corrosion, delamination, material degradation and other types of
damage are a major concern in the operational environment.
In recent years, Structural Health Monitoring is increasingly being evaluated by the
industry as a possible method to improve the safety and reliability of structures and thereby
reduce their operational cost. Structural health monitoring technology is perceived as a
revolutionary method of determining the integrity of structures involving the use of
multidisciplinary fields including sensors, materials, signal processing, system integration
and signal interpretation. The core of the technology is the development of self-sufficient
systems for the continuous monitoring, inspection and damage detection of structures with
minimal labor involvement. The future aim of this research work is to incorporated
Piezoelectric sensor (Fig. 20) in ABAQUS6.9-2 to identify the crack growth. An important
part of the system is the proper integration of the sensors and actuators with model.
Figure 20. Piezoelectric sensor
Piezoelectric sensors and actuators are made of piezoelectric materials (piezo-crystals,
ceramics, and polymers). Materials that have a piezoelectric effect convert mechanical
force to electrical charge, and vice versa. Hence, piezoelectric materials can be used as
30
both sensors and actuators. As sensors, they produce an electrical signal when they are
physically deformed (strained). As actuators, they physically deform (expand, contract, or
shear) when an electrical charge is applied. Using this property, piezoelectric materials can
be used to measure stress and strain and can also be used to mechanically excite the
structure to propagate stress waves and induce internal vibrations. Inputting a time-varying
electrical signal to any of the actuators/sensors causes a propagating stress wave or
propagating mechanical deformation to emanate from the sensor/actuator and travel
through the material for detection by a plurality of neighboring sensors/actuators.
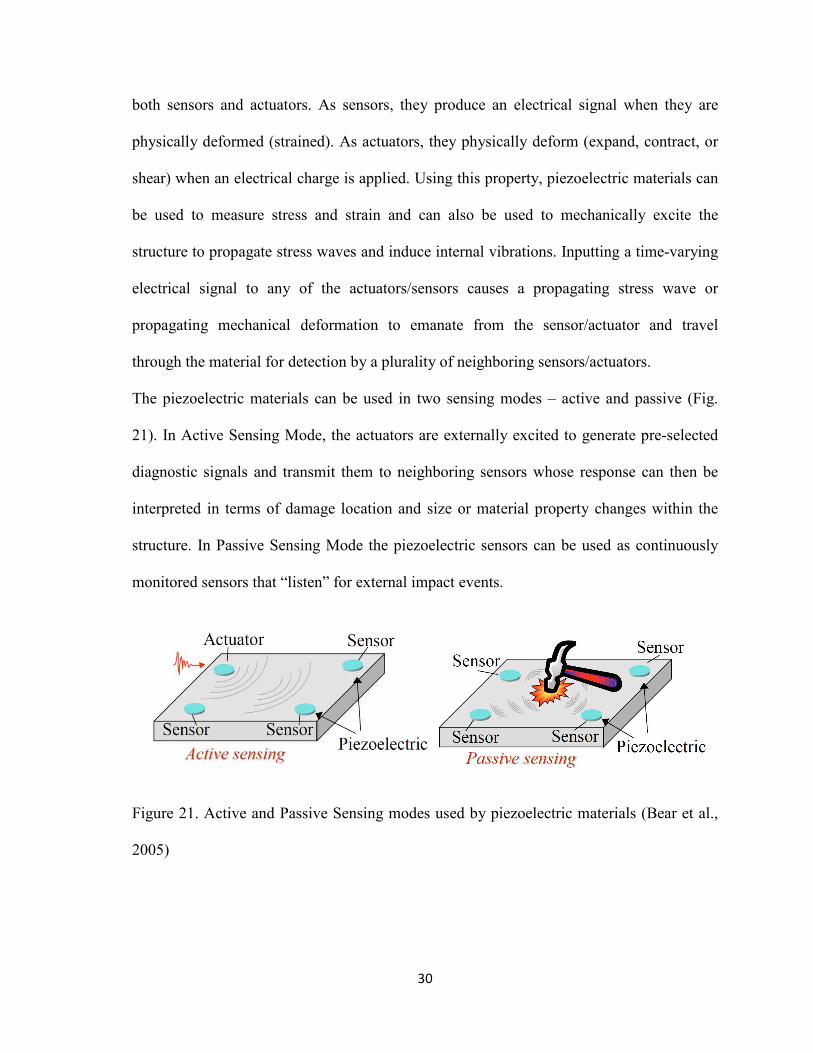
The piezoelectric materials can be used in two sensing modes – active and passive (Fig.
21). In Active Sensing Mode, the actuators are externally excited to generate pre-selected
diagnostic signals and transmit them to neighboring sensors whose response can then be
interpreted in terms of damage location and size or material property changes within the
structure. In Passive Sensing Mode the piezoelectric sensors can be used as continuously
monitored sensors that “listen” for external impact events.
Figure 21. Active and Passive Sensing modes used by piezoelectric materials (Bear et al.,
2005)
31
7.0 REFERENCES
1) ABAQUS 6.9 User’s Manual “Low-cycle fatigue analysis using the direct cyclic
approach,” Section 6.2.7
2) ABAQUS 6.9 User’s Manual “Crack propagation analysis,” Section 11.4.3
3) ABAQUS 6.9 User’s Manual “Damage and failure for ductile materials in low-cycle
fatigue analysis: overview” Section 20.4.1
4) Begley, J. and Landes, J. “The J-Integral as a Fracture Criterion”, Fracture Toughness,
Proceedings of the 1971 National Symposium on Fracture Mechanics, Part II, ASTM
STP 514, American Society for Testing and Materials, 1972, pp. 1-20.
5) Bucci, J.et al. “J integral estimation procedures”, Fracture Toughness, Proceedings of
the 1971 National Symposium on Fracture Mechanics, Part II, ASTM STP 514,
American Society for Testing and Materials, 1972, pp. 40-69.
6) Courtin, S., et al. (2005). Advantages of the J-integral approach for calculating stress
intensity factors when using the commercial finite element software ABAQUS.
Engineering Fracture Mechanics. Vol 72. Pages 2174-2185.
7) Dowling, N. and Begley, J. “Fatigue crack growth during gross plasticity and the J-
integral”, Mechanics of crack growth, ASTM STP 590, 1976, pp. 82-103.
8) Ritchie R, Boyce BL, Campbell JP, Roder O, Thompson AW, Milligan WW.
Thresholds for high-cycle fatigue in a turbine engine Ti–6Al–4V alloy. Int J Fatigue
1999; 21: 653–62.
9) Rice, J. “Limitations to the small scale yielding approximation for crack tip
plasticity”Journal of Mechanics and Physics of Solids. 1974, Vol 22, pp. 17-26.
32
10) Landes, J. and Begley, J. “The effect of specimen geometry on JIc”, Fracture
Toughness, Proceedings of the 1971 National Symposium on Fracture Mechanics, Part
II, ASTM STP 514, American Society for Testing and Materials, 1972, pp. 24-39
11) Paris, P. et al. “A rational analytic theory of fatigue”, The trend in engineering, 1961,
Vol 13, pp. 9-14.
12) Pun, A. ‘Three methods of calculating total life, crack initiation, and crack growth’,
Senior Product Manager, MSC.Software Corp. -- Design News, December 16, 2001
13) Ramberg, W., & Osgood, W. R. (1943). Description of stress-strain curves by three
parameters. Technical Note No. 902, National Advisory Committee For Aeronautics,
Washington DC.
14) Simha, N., et al. (2008), J-integral and crack driving force in elastic–plastic materials.
Journal of the Mechanics and Physics of Solids, Vol 56, pp 2876-2895.
15) Stephens, R. et al. (2001). Metal Fatigue in Engineering 2nd Edition. John Wiley and
Sons. New York.