-
142
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
HAND POSTURE RECOGNITION
USING SVM TECHNIQUES
K Praveen Kumar1* and Bhakkiyalakshmi R1
This paper presents a better and accurate way to human computer
interaction methods. A realtime system is proposed and developed
which needs no glove of sensors for the hand, still wecan directly
interact with system. The implemented system is tested by
demonstrating how wecan control device using the hand signs.
Gesture recognition interfaces can be used as a
naturalcommunication channel between humans and machines and give
rise to a plethora of applicationssuch as hardware-free remote
controls, sign language interpretation and other human
welfareapplications.
Keywords: Hand Gesture, SVM, Erosion, Dilution, Morphological
operations, AbsoluteDifference, Contour, Binary Thresholding
*Corresponding Author: K Praveen Kumar � [email protected]
INTRODUCTION
Evolution of technology and the development of
digital signal processing in combine providing a
way to interact with the computers virtually. We
can personalize this development so that is useful
to simplify the human effort in real time. In present
scenario gesture recognition systems are widely
occupying most of the daily routine works, as we
can make use of the device on the go. These
systems are like ALERT and FORGOT. We can
use this hand sighs in controlling mouse, keyboard
functions. Rapid and simple conversion of hand
movements into 3D computer space for the
purposes of computer animation is another area
of interest.
1 SRM University, Chennai, India.
Int. J. Engg. Res. & Sci. & Tech. 2014
ISSN 2319-5991 www.ijerst.com
Vol. 3, No. 2, May 2014
© 2014 IJERST. All Rights Reserved
Research Paper
The hardware used for computer games of
present generation slowly replacing with the sign
language. Control of mechanical systems such
as robotics. Using the hand to remotely control a
manipulator. The extensive experiments
demonstrate that our hand gesture recognition
system is accurate efficient robust to hand
articulations, distortions and orientation or scale
changes, and can work in uncontrolled
environments with cluttered backgrounds
(Malassiotis and Strintzis, 2008) and lighting
conditions. The superiority of our system is further
demonstrated in two real-life HCI applications (El-
Sawal et al., 2008).
There are many pattern recognition
-
143
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
techniques. However, the problem with gesture
recognition (Nasser et al., 2011) is that the inputs
usually consist of multi-dimensional and time-
varying Data. If the input data were either multi-
dimensional or time varying, existing pattern
recognition techniques could easily be applied. A
common approach to handling such data is to
divide each gesture into short phases, and then
to recognize each phase using a pattern
recognition technique for multi-dimensional data.
In order to be applicable to current PCs and mobile
devices, a gesture recognition system should be
based on existing and common hardware such
as low-resolution web cams or mobile-integrated
cameras. It is also desired that the System will
be able to operate under non-uniform background,
lighting and noise conditions. Another requirement
for the gesture recognition system is to be
computationally non-intensive in order to be
suitable for real-time classification.
We use an SVM to learn the transition
conditions for each state. The SVM is a popular
pattern recognition technique with supervised
learning. Since it divides the feature space for
each class, the SVM can handle unknown data
well, although it is not suited to grouping sample
data. In order to classify the dynamic hand
gestures under noisey background, motion history
image and different groups of novel Haar-like
features (Kolsch and Turk, 2004) are investigated
to classify the dynamic up, down, left, and right
hand gestures. A simple efficient algorithm using
Support Vector Machine is developed. These
defined hand gestures are intuitive and easy for
user to control most home appliances. The
primary idea of the SVMs is to implement a
hyperplane (Hirotaka et al., 2001) as the decision
plane, which separates the positive and negative
binary classes with the largest margin, which is
related to minimizing the VC dimension of SVM.
In a binary classification problem where feature
extraction is initially performed.
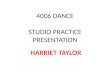
BLOCK DIAGRAM AND
EXPLANATION
Components Description
Transmitter Section
A Camera is used to capture the frames from
real time. Most of the technological device comes
Figure 1: Transmitter Section
with integrated cameras however we can add the
externally to make it more flexible.
PC is the module where all the processing like
storing temporary frames, developing pattern
recognition algorithm takes place. It has to be with
good processing speed and also has to support
the required development environment.
UART provides the physical communication
link between the PC and the hardware we are
developing. The MCU is the processing unit for
the hardware.
Encoder module improves error less
transmission over a noisy channel. We can use
NXM class devices based on our requirements.
RF transmitter suitable for short distance
communication. Speed and Accurate. The rate
-
144
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
of oscillation in the range of around 3 kHz to 300
GHz and 3 m to 30 m distance can be covered.
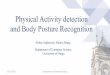
Receiver Section
RF receiver receives the signal sent by the
transmitter and decodes it.
Decoder helps to find the errors occurred in
the transmission.
Voice board is nothing but a sounding device.
It’s like an announcer of the recognized sign. Let’s
say when system identifies a sign as ONE it
speaks as ONE.
Most of the high end industrial application
devices have relays for their effective working.
Relays are simple switches which are operated
both electrically and mechanically. Relays consist
of an electromagnet and also a set of contacts.
The switching mechanism is carried out with the
help of the electromagnet. There are also other
operating principles for its working. But they differ
according to their applications. We use Single
Pole Single Throw (SPST) type here for
implementation. However we can choose our
desired type based on the requirement.
SOFTWARE ENVIRONMENT
The required software environment is provided
by the Programs named OpenCV and
Figure 2: Reciever Section
MICROSOFT VISUAL STUDIO.
OpenCV is an open source C++ library for
image processing and computer vision, originally
developed by Intel and now supported by Willow
Garage. It is free for both commercial and non-
commercial use. Therefore it is not mandatory
for your OpenCV applications to be open or free.
It is a library of many inbuilt functions mainly aimed
at real time image processing. Now it has several
hundreds of image processing and computer
vision algorithms which make developing
advanced computer vision applications easy and
efficient.
Key Features: Optimized for real time imageprocessing and
computer vision applications.
Primary interface of OpenCV is in C++. There
are also C, Python and JAVA full interfaces.
OpenCV applications run on Windows, Android,
Linux, Mac and Ios. Optimized for Intel
processors.
OpenCV(http://docs.opencv.org/master/doc/
user_guide/user_guide.html) has a modular
structure. The main modules of OpenCV are
listed below
CORE: This is the basic module of OpenCV. Itincludes basic data
structures (e.g. - Mat data
structure) and basic image processing functions.
This module is also extensively used by other
modules like highgui, etc.
Highgui: This module provides simple userinterface capabilities,
several image and video
codecs, image and video capturing capabilities,
manipulating image windows, handling track bars
and mouse events and etc.
Imgproc: This module includes basic imageprocessing algorithms
including image filtering,
image transformations, color space conversions
-
145
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
and etc.
Video: This is a video analysis module whichincludes object
tracking algorithms, background
subtraction algorithms and etc. Objdetect: This
includes object detection and recognition
algorithms for standard objects. OpenCV is now
extensively used for developing advanced image
processing and computer vision applications. It
has been a tool for students, engineers and
researchers in every nook and corner of the world.
The library is very much rich for processing
real time images some of those important
functions and syntax are given below. However
you can find these functions in the official page of
the OpenCV as its free of licence.
cvCapture ();
Syntax: typedef struct CvCapture;
CvNamedWindow ();
Creates window with given name.
Syntax: Int cvNamedWindow (const char*name, int
flags=CV_WINDOW_AUTOSIZE);
CvGrabFrame();
Grabs frame from camera or file.
Syntax: int cvGrabFrame( CvCapture* capture)
cvReleaseCapture();
Releases the CvCapture structure
Syntax: void cvReleaseCapture( CvCapture**capture);
WORKING
A camera is used to acquire the image in real
time and then sends to PC. It may be a integrated
to the system or we can add externally. We
cannot process images as soon as we got them
from camera in real time The image is stored
temporarily and processing section will the
recognize the hand gesture. First the trained xml
file must be lined in the program so that the
system first identifies the hand. Then we focus
on the hand part. We convert the hand image
into a fully binary image which is a black and white
version of the image. This also known as
histogram of the image in which all pixels must
either white or black. Then the system able to
recognize the gesture of the hand and the
corresponding signal is sent to the transmitter
section which is connected to PC. The transmitter
transmits with RF frequency. The receiver
receives the signals and control the device with
relay as per the hand gesture. The voice board
tells the identified gesture.
However real time noise is unpredictable so
we can implement some additional add-ons. First
we make sure that the object (Viola, 2001)
present in the frame is human for this we can
look for face. As the sensors are abundantly
available in the market we can go for a
temperature sensor to verify the human with body
temperature or we can go for a heartbeat sensor.
The noise can be minimized with image
processing techniques, Absolute Difference,Contour, and Binary
Thresholding.
OBSERVED RESULTS
The number fingers in the frame can be identified
Figure 3: One Sign
-
146
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
show that the system can achieve satisfactory
real-time performance regardless of the frame
resolution size as well as high classification
accuracy under variable scale, orientation and
illumination conditions, and cluttered background.
Three important factors affect the accuracy of
the system, which are the quality of the webcam
in the training and testing stages, the number of
the training images. However, if detection of hand
gestures for computer animation (Du W and Li
H, 2000) is required then we must train the system
with thousands of gestures which is complex but
yields high accuracy. A system which relies on
both training and comparison of all gestures used
would not be sufficient for this task.
REFERENCES
1. Du W and Li H (2000), “Vision based gesture
recognition system with single camera”, In:
Proceedings of ICSP, pp. 1351–1357.
2. El-Sawah A, Georganas N, and Petriu E
(2008), “A prototype for 3-D hand tracking
and gesture estimation,” IEEE Trans.
Instrum. Meas., Vol. 57, No. 8, pp. 1627–
1636.
3. Hirotaka Iuchi, Sakashi Maeda and Naoyuki
Tsuruta (2001), “Gesture Recognition using
Self- Organizing Maps and Hidden Markov
Model”, IPSJ SIG Notes, Computer Vision
and Image Media, Vol. 2001, No. 36, pp. 127-
134.
4. ht tp: / /docs.opencv.org/master /doc/
user_guide/user_guide.html
5. Kolsch M and M. Turk, “Analysis of rotational
robustness of handdetection with a Viola-
Jones detector,” in Proc. 17th ICPR, 2004,
pp. 107–110.
Figure 4: Two Sign
Figure 5: Three Sign
Figure 6: Fist Sign
by using the number of peaks in the frame.
However if two nearest peaks are found the
system treats that case as a one finger. It is
necessary that when performing the gesture on
the frame sufficient distance must be engaged
between the fingers.
CONCLUSION
In this paper, we have described a real-time
system that consists of three modules: hand
detection and tracking using skin detection and
contour comparison algorithm, posture
recognition using multiclass SVM, Experiments
-
147
This article can be downloaded from
http://www.ijerst.com/currentissue.php
Int. J. Engg. Res. & Sci. & Tech. 2014 K Praveen Kumar
and Bhakkiyalakshmi R, 2014
6. Malassiotis and Strintzis M G (2008), “Real-
time hand posture recognition using range
data”, Image and Vision Computing, Vol. 26,
pp. 1027 - 1037.
7. Nasser H Dardas and Nicolas D Georganas
(2001), “Real-Time Hand Gesture Detection
and Recognition Using Bag-of-Features and
Support Vector Machine Techniques”, IEEE
Trans.Instrum. Meas., Vol. 60, No. 11.
8. Viola P and Jones M (2001), “Rapid object
detection using a boostedcascade of simple
features”, In: Proceedings of the IEEE
Computer Society Conference on Computer
Vision and Pattern Recognition, pp. 511–518.
-
/ColorImageDict > /JPEG2000ColorACSImageDict >
/JPEG2000ColorImageDict > /AntiAliasGrayImages false
/CropGrayImages true /GrayImageMinResolution 300
/GrayImageMinResolutionPolicy /OK /DownsampleGrayImages true
/GrayImageDownsampleType /Bicubic /GrayImageResolution 300
/GrayImageDepth -1 /GrayImageMinDownsampleDepth 2
/GrayImageDownsampleThreshold 1.50000 /EncodeGrayImages true
/GrayImageFilter /DCTEncode /AutoFilterGrayImages true
/GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict >
/GrayImageDict > /JPEG2000GrayACSImageDict >
/JPEG2000GrayImageDict > /AntiAliasMonoImages false
/CropMonoImages true /MonoImageMinResolution 1200
/MonoImageMinResolutionPolicy /OK /DownsampleMonoImages true
/MonoImageDownsampleType /Bicubic /MonoImageResolution 1200
/MonoImageDepth -1 /MonoImageDownsampleThreshold 1.50000
/EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode
/MonoImageDict > /AllowPSXObjects false /CheckCompliance [ /None
] /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false
/PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000
0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true
/PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ]
/PDFXOutputIntentProfile () /PDFXOutputConditionIdentifier ()
/PDFXOutputCondition () /PDFXRegistryName () /PDFXTrapped
/False
/Description > /Namespace [ (Adobe) (Common) (1.0) ]
/OtherNamespaces [ > /FormElements false /GenerateStructure true
/IncludeBookmarks false /IncludeHyperlinks false
/IncludeInteractive false /IncludeLayers false /IncludeProfiles
true /MultimediaHandling /UseObjectSettings /Namespace [ (Adobe)
(CreativeSuite) (2.0) ] /PDFXOutputIntentProfileSelector /NA
/PreserveEditing true /UntaggedCMYKHandling /LeaveUntagged
/UntaggedRGBHandling /LeaveUntagged /UseDocumentBleed false
>> ]>> setdistillerparams> setpagedevice