Embed Size (px)
Citation preview

Research ArticleStudy on Zero-Doppler Centroid Control forGEO SAR Ground Observation
Yicheng Jiang Bin Hu Yun Zhang Meng Lian and Zhuoqun Wang
Research Institute of Electronic Engineering Technology Harbin Institute of Technology No 714 Harbin 150001 China
Correspondence should be addressed to Bin Hu hubin hitqqcom
Received 7 March 2014 Revised 11 June 2014 Accepted 8 July 2014 Published 26 November 2014
Academic Editor Bing Liu
Copyright copy 2014 Yicheng Jiang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In geosynchronous Earth orbit SAR (GEO SAR) Doppler centroid compensation is a key step for imaging process which could beperformed by the attitude steering of a satellite platform However this zero-Doppler centroid control method does not work wellwhen the look angle of radar is out of an expected range This paper primarily analyzes the Doppler properties of GEO SAR in theEarth rectangular coordinate Then according to the actual conditions of the GEO SAR ground observation the effective range ispresented by the minimum and maximum possible look angles which are directly related to the orbital parameters Based on thevector analysis a new approach for zero-Doppler centroid control in GEO SAR performing the attitude steering by a combinationof pitch and roll rotation is put forward This approach considering the Earthrsquos rotation and elliptical orbit effects can accuratelyreduce the residual Doppler centroid All the simulation results verify the correctness of the range of look angle and the proposedsteering method
1 Introduction
There has been an increasing interest in GeosynchronousEarth orbit SAR (GEO SAR) for the purpose of surveillancewith large observation In fact this broadside-looking SARhas a non-zero-Doppler centroid due to the Earthrsquos rotationand elliptical orbit effects [1] Compensating the residualDoppler centroid is an important step to solve the range-azimuth coupling which decreases the quality of SAR imag-ing The zero-Doppler attitude steering method was first putforward by Raney in the literature [2] which used a 1D yawsteering method to compensate the Doppler shift induced bythe Earthrsquos rotation This method is useful in circular orbitsbut it causes larger Doppler shifts in elliptical satellite orbitslike GEO SAR Later a method (the TerraSAR-X method) of2D attitude steering was carried out in the low Earth ellipticalorbits (LEO) SAR in literatures [3 4] yet this 2D attitudesteering method does not work well particularly with thelarge residual Doppler centroid exited inGEOSARThen thetotal zero-Doppler steering (TZDS) method was proposed inthe literatures [5 6] taking the Earthrsquos rotation and ellipticalorbit effects into account The method in [5] can minimizethe Doppler residuals in the LEO SAR system but it isnot suitable for the GEO SAR system Subsequently a 2D
phase scanmethod was introduced in literatures [7 8] whichcarried out a highly accurate compensation of the Dopplercentroid in GEO SAR By using the 2D phased scan instead ofthe attitude steering the approach in [7] can avoid the satelliteplatform rotation and stabilization
However these methods mentioned above are invalid orinaccurate when the look angle of radar is out of an effectiverange which is elaborated as follows
(i) The Earthrsquos surface could not be observed by the radarwhen the look angle is greater than the maximum ofthe range
(ii) The coverage of radar cannot provide valid echoeswith a zero-Doppler centroid when the look angle isless than the minimum of the range
For the above issues this paper introduces a generalapproach to compensate the Doppler centroid frequency forthe spaceborne SAR which works with a look angle within aneffective range The paper is organized as follows Section 2describes the GEO SAR geometry and notation and theDoppler vector of the satellite-borne SAR is analyzed inthe Earth rectangular coordinate (ERC) In Section 3 thederivation of the effective range of the look angle is firstly
Hindawi Publishing CorporationInternational Journal of Antennas and PropagationVolume 2014 Article ID 549269 7 pageshttpdxdoiorg1011552014549269
2 International Journal of Antennas and Propagation
S
xo
yo
zo
z4
y4
x4
120579
120579
120593
P Beam center point
S
Q
R119956
R119956
Rst
R119957
Oe
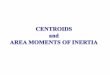
Figure 1 Geometry of the earth rectangular coordinates andsatellite local coordinates
presented in detail The range is determined by the satelliteorbit parameters such as the orbital eccentricity the argumentof perigee Then based on a reasonable look angle a newmethod of zero-Doppler centroid control performed by thepitch and roll attitude steering is introduced In Section 4simulation results validate the correctness of derivation in thepaper Conclusions appear in Section 5
2 Vector Analysis in GEO SAR Model
The geometry of the Earth rectangular coordinate (ERC)119874119890-119909411991041199114is shown in Figure 1 The ERC can be defined as
the coordinate origin is the Earthrsquos center 119874119890 the 119874
1198901199094-axis
is along the Greenwich meridian direction in the equatorialplane the axis of 119874
1198901199114-axis is along the Earth angular
momentum direction and the 1198741198901199104-axis obeys a right-hand
rule In Figure 1 119875 is the intersection of the beam-pointingdirection and the Earthrsquos surface which is called the ldquobeamcenter pointrdquo (BCP) in this paper and 119876 is the nadir point ofthe satelliteRt andRs are the position vectors of the BCP andthe satellite respectively Rs and Rt are the first-order timederivative of Rs and Rt The relative position vector betweenthe satellite and the BCP is expressed as Rst = Rs minus Rt Theslant range 119877st =
1003816100381610038161003816Rs minus Rt1003816100381610038161003816 varies along the orbit which can
be calculated by
119877st (119905) = 119877119904 (119905) cos (120593) minus radic1198772119905 minus 1198772119904 (119905) sin (120593) (1)
where 120593 is the look angle of radar (shown in Figure 1) 119877119904(119905)
and 119877119905are the magnitudes of Rs(119905) and Rt(119905) respectively
Note that 119877119905is a constant that is the length of the Earthrsquos
radius The formula of 119877119904(119905) is given by the literature [9]
The Doppler centroid 119891dc of the beam center point alongthe orbit is given by the literature [7]
119891dc (119905) = minus2
120582
Rst (119905) sdot Rst (119905)1003816100381610038161003816Rst (119905)
1003816100381610038161003816
= minus2
120582
(Rs (119905) minus Rt (119905)) sdot (Rs (119905) minus Rt (119905))1003816100381610038161003816Rs (119905) minus Rt (119905)
1003816100381610038161003816
(2)
where 120582 is the radar wavelength the symbol || indicates thevector magnitude Noting that Rt(119905) = 0 in the ERC theformula of the Doppler centroid can be rewritten as
119891dc (119905) = minus2
120582
(Rs (119905) minus Rt (119905)) sdot Rs (119905)1003816100381610038161003816Rs (119905) minus Rt (119905)
1003816100381610038161003816
(3)
It is apparent that the Doppler centroid 119891dc(119905) is not onlydetermined by the satellite position but also dependent onthe position of the BCP Both are important for the analyticalderivation of the 2D attitude steering angles which will beshown in Section 3
To obtain the analytic formula for the position vectorof the BCP it is needed to find the relationship betweenthe satellite and the BCP in the satellite local coordinatesystem (SCS) 119878-119909
119900119910119900119911119900(see Figure 1) The SCS is defined
as the coordinate origin is the center of the satellite massthe 119878119911
119900-axis is along the satellite position vector towards the
Earthrsquos center the axis of 119878119909119900is perpendicular to the 119878119911
119900-axis
in the orbital plane (the angle between the 119878119909119900axis and the
satellite velocity vector is less than 90∘) and the 119878119910119900-axis obeys
the right-hand rule The formula for the slant range vector ofthe BCP in the SCS can be expressed as
Rst (119905) = [119877st (119905) sin (120593) cos (120579 (119905))
minus119877st (119905) sin (120593) sin (120579 (119905)) 119877st (119905) cos (120593)]119879
(4)
where 120579(119905) is the angle between the axis 119878119909119900and the projection
of the beam pointing vector in the 119909119900-119910119900plane (as shown in
Figure 1) and can be presented as
120579 (119905) = arccos(sin (120579119904)
cos (120595 (119905))) (5)
where 120579119904is the squint angle of radar and 120595(119905) is the angle
between the 119878119909119900-axis and the satellite velocity vector
120595 (119905) = arccos( Rs (119905) sdot Rs (119905)1003816100381610038161003816Rs (119905)
1003816100381610038161003816 sdot10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) minus120587
2 (6)
The position equation of the BCP in the Earth rectangularcoordinate is given by
Rt (119905) = [
[
119883t (119905)119884t (119905)119885t (119905)
]
]
=WA (119905) timesWB timesWc (119905) times Rsp (119905) (7)
International Journal of Antennas and Propagation 3
where
WA (119905) = [
[
cos (119908119890sdot 119905) sin (119908
119890sdot 119905) 0
minus sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]
]
WB = [
[
cos (Ω0) minus sin (Ω
0) 0
sin (Ω0) cos (Ω
0) 0
0 0 1
]
]
times [
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]
]
times [
[
cos (1205960) minus sin (120596
0) 0
sin (1205960) cos (120596
0) 0
0 0 1
]
]
Wc (119905) = [
[
cos (119891 (119905)) minus sin (119891 (119905)) 0sin (119891 (119905)) cos (119891 (119905)) 0
0 0 1
]
]
Rsp (119905) = [
[
0 0 minus1
1 0 0
0 minus1 0
]
]
times Rst (119905) + [
[
119877119904(119905)
0
0
]
]
(8)
where the symbol times represents cross product119908119890is the Earthrsquos
angular velocity 119894 indicates the orbit inclination Ω0is the
longitude of ascending node 1205960represents the argument of
perigee and 119891(119905) indicates the argument of latitude (ie thesum of the true anomaly and the perigee argument)
3 Zero-Doppler Centroid Control
As we known when the angle 120579 = 90∘ the beam-pointing
vector is perpendicular to the velocity vector of satellite andRst(119905) sdot Rst(119905) = 0 in (2) However owing to the influences ofearth rotation and elliptical orbit sometimesRst(119905)sdotRst(119905) = 0especially in GEO SAR and it affects the quality of image bythe residual Doppler centroid Fortunately it can be resolvedby steering the satellitersquos attitude angles to reduce the offset ofthe Doppler centroid
The geometry of the spaceborne radar after zero-Dopplercentroid control is illustrated in Figure 2 in which the radarobserves the Earthrsquos surface with the look angle 120593 120572 is theangle of instance 120573 is the geocentric angle which is given by
120573 (119905) = arcsin [119877119904(119905)
119877119905
sin (120593)] minus 120593 (9)
The distance between the radar and the BCP over theorbital period can be calculated by
1003816100381610038161003816Rst (119905)1003816100381610038161003816
2
=1003816100381610038161003816Rs (119905)
1003816100381610038161003816
2
+1003816100381610038161003816Rt (119905)
1003816100381610038161003816
2
minus 21003816100381610038161003816Rs (119905)
10038161003816100381610038161003816100381610038161003816Rt (119905)
1003816100381610038161003816 cos (120573 (119905)) (10)
After the attitude steering the relative velocity vectorbetween the satellite and the BCP is perpendicular to therelative position vector According to the properties of thevector inner product we have
Rst (119905) sdot Rs (119905) = 0 (11)
Earth
Equator
Beam centerpoint
O
120572
120573
120593
R119956
R119956
Rst
R119957
Figure 2 Geometry of the satellite after zero-Doppler centroidcontrol
Then combining the aforementioned expressions theposition equation of the new beam center point (after the atti-tude steering) in ERCwhich is expressed as [119909 (119905) 119910 (119905) 119911(119905)]for the convenience of clarity can be calculated by thefollowing equations
1199092
(119905) + 1199102
(119905) + 1199112
(119905) = 1198772
119905
(119909 (119905) minus 119909119904(119905))2
+ (119910 (119905) minus 119910119904(119905))2
+ (119911 (119905) minus 119911119904(119905))2
= 1198772
119904(119905) + 119877
2
119905minus 2119877119904(119905) 119877119905cos (120573 (119905))
(119909 (119905) minus 119909119904(119905)) 119904(119905) + (119910 (119905) minus 119910
119904(119905)) 119910119904(119905)
+ (119911 (119905) minus 119911119904(119905)) 119904(119905) = 0
(12)
where the position vector of the satellite [119909119904(119905) 119910119904(119905) 119911119904(119905)]
and its velocity vector [119904(119905) 119910119904(119905) 119904(119905)] are given by the
literature [10] 119909(119905) 119910(119905) and 119911(119905) are solved as follows
119909 (119905) =119861 (119905) 119909
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119909
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119910119904(119905) 119904(119905) minus 119910
119904(119905) 119911119904(119905)
1198772119904(119905)
119862 (119905)
4 International Journal of Antennas and Propagation
119910 (119905) =119861 (119905) 119910
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 1199102
119904(119905) 119860 (119905) minus 119910
119904(119905) 1198602
(119905) minus 119910119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119911119904(119905) 119904(119905) minus
119904(119905) 119909119904(119905)
1198772119904(119905)
119862 (119905)
119911 (119905) =119861 (119905) 119911
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119911
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119909119904(119905) 119910119904(119905) minus 119910
119904(119905) 119904(119905)
1198772119904(119905)
119862 (119905)
(13)
where
119860 (119905) = 119909119904(119905) 119904(119905) + 119910
119904(119905) 119910119904(119905) + 119911
119904(119905) 119904(119905)
119861 (119905) = 119877119904(119905) 119877119905cos (120573 (119905))
119862 (119905)
= radic1198772119904(119905) 1198772
119905sin2 (120573 (119905)) minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
(14)
In (13) 119896 = +1 denotes the radar looks from the left-sidewhile 119896 = minus1means the radar is right looking
Under the condition of circular orbit 119860(119905) = 0 and (13)can have solutions For an elliptical orbit SAR like GEOSAR the necessary and sufficient condition when (13) hassolutions is that the square root terms in 119862(119905) need to meetthe following requirements
1198772
119904(119905) 1198772
119905sin2 (120573 (119905))
minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
ge 0
(15)
Meanwhile to ensure the observation of a target fixedon the Earth by a space-borne SAR the following inequalityneed to be satisfied
minus arcsin(119877119905
119877119904(119905)) le 120601 (119905) le arcsin(
119877119905
119877119904(119905)) (16)
Combining (15) and (16) without the loss of generalitythe range of the look angle is expressed as
arcsin( |119860 (119905)|
119877119904(119905)10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) le1003816100381610038161003816120593 (119905)
1003816100381610038161003816 le arcsin(119877119905
119877119904(119905)) (17)
0 50 100 150 200 250 300 350minus1500
minus1000
minus500
0
500
1000
1500
Argument of Latitude (deg)
fdc (
Hz)
No attitude steering2D attitude steering
Perigee Apogee
Figure 3 Comparison of the Doppler residuals before and after theattitude steering
Through the transformation matrix between the SCS andthe ERC the track of the new beam center point in the SCScan be calculated by
[
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
= [
[
0 1 0
0 0 minus1
minus1 0 0
]
]
times UA (119905) times UB times UC (119905)
times [
[
119909 (119905)
119910 (119905)
119911 (119905)
]
]
+ [
[
0
0
119903 (119905)
]
]
(18)
where
UA (119905) = [
[
cos (119891 (119905)) sin (119891 (119905)) 0
minus sin (119891 (119905)) cos (119891 (119905)) 00 0 1
]
]
UB =[[
[
cos (1205960) sin (120596
0) 0
minus sin (1205960) cos (120596
0) 0
0 0 1
]]
]
times[[
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]]
]
times[[
[
cos (Ω0) sin (Ω
0) 0
minus sin (Ω0) cos (Ω
0) 0
0 0 1
]]
]
UC (119905) =[[
[
cos (119908119890sdot 119905) minus sin (119908
119890sdot 119905) 0
sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]]
]
(19)
International Journal of Antennas and Propagation 5
minus4
minus3
minus2
minus1
0
1
2
3
4
Argument of Latitude (deg)
Pitc
h an
gle (
deg)
Perigee Apogee
0 50 100 150 200 250 300 350
(a)
0 50 100 150 200 250 300 350minus25
minus2
minus15
minus1
minus05
0
Argument of Latitude (deg)
Roll
angl
e (de
g)
Perigee Apogee
(b)
Figure 4 The pitch angles and the roll angles of the 2D method along the orbit
0
20
40
60
80
minus60
minus40
minus20
0 20 40 60 80
Longitude (deg)
Latit
ude (
deg)
Track of the nadir pointTrack of the ldquobeam centerrdquo before the attitude steeringTrack of the ldquobeam centerrdquo
Perigeepoint
Startingpoint
after the attitude steering
Figure 5 Comparisons of the track of the nadir point and two tracksof the BCP before and after the attitude steering
Then combining (4) the transformation matrixesbetween the track of the new BCP and the track of theoriginal one in the SCS can be presented as
[
[
1 0 0
0 cos (120579119883(119905)) minus sin (120579
119883(119905))
0 sin (120579119883(119905)) cos (120579
119883(119905))
]
]
times [
[
cos (120579119884(119905)) 0 sin (120579
119884(119905))
0 1 0
minus sin (120579119884(119905)) 0 cos (120579
119884(119905))
]
]
times [
[
119877st sin (120593) cos (120579)minus119877st sin (120593) sin (120579)
119877st cos (120593)]
]
= [
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
(20)
where 120579119884(119905) is the angle that the satellite rotates around the
axis of 119878119910119900and 120579
119883(119905) is the angle that the satellite rotates
around the axis of 119878119909119900 Based on the relationship between the
attitude steering angles and the axis angles (120579119883(119905) and 120579
119884(119905))
in (20) the pitch steering angle 120579119875(119905) and the roll steering
angle 120579119877(119905) can be expressed as
120579119875(119905)=arcsin(
1199090(119905)
119877st (119905)) minus arcsin (sin (120593) cos (120579 (119905))) minus 120595 (119905)
120579119877(119905) = minus arcsin(
1199100(119905)
119877st (119905) sdot cos (120579119875 (119905)))
minus arcsin(sin (120593) sin (120579 (119905))
radic1 minus sin2 (120593) cos2 (120579 (119905)))
(21)
4 Simulation and Analysis
For investigations of the numerically applied 2D steeringmethod the relevant orbit parameters of GEO SAR as listedin Table 1 are used
Before the 2D attitude steering the Doppler centroid 119891dcvaries along the orbit as the blue line shown in Figure 3 Thenon-zero-Doppler centroid is caused by Earthrsquos rotation andthe elliptical orbit The red line in Figure 3 shows that 119891dccan be perfectly compensated to zero by using the approachpresented in this paper
In simulations the GEO satellite starts at the ascendingnode and the radar is left looking during the orbital periodFigure 4 depicts the two attitude angles of the proposedmethod which can minimize the Doppler centroid shifts InFigure 4 the positivenegative values of the angle indicate theangles that the satellite rotates around its axis anticlockwiseclockwise It is apparent that both the attitude angles varywithin a small range of degreesThemaximum pitch steering
6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Antennas and Propagation
S
xo
yo
zo
z4
y4
x4
120579
120579
120593
P Beam center point
S
Q
R119956
R119956
Rst
R119957
Oe
Figure 1 Geometry of the earth rectangular coordinates andsatellite local coordinates
presented in detail The range is determined by the satelliteorbit parameters such as the orbital eccentricity the argumentof perigee Then based on a reasonable look angle a newmethod of zero-Doppler centroid control performed by thepitch and roll attitude steering is introduced In Section 4simulation results validate the correctness of derivation in thepaper Conclusions appear in Section 5
2 Vector Analysis in GEO SAR Model
The geometry of the Earth rectangular coordinate (ERC)119874119890-119909411991041199114is shown in Figure 1 The ERC can be defined as
the coordinate origin is the Earthrsquos center 119874119890 the 119874
1198901199094-axis
is along the Greenwich meridian direction in the equatorialplane the axis of 119874
1198901199114-axis is along the Earth angular
momentum direction and the 1198741198901199104-axis obeys a right-hand
rule In Figure 1 119875 is the intersection of the beam-pointingdirection and the Earthrsquos surface which is called the ldquobeamcenter pointrdquo (BCP) in this paper and 119876 is the nadir point ofthe satelliteRt andRs are the position vectors of the BCP andthe satellite respectively Rs and Rt are the first-order timederivative of Rs and Rt The relative position vector betweenthe satellite and the BCP is expressed as Rst = Rs minus Rt Theslant range 119877st =
1003816100381610038161003816Rs minus Rt1003816100381610038161003816 varies along the orbit which can
be calculated by
119877st (119905) = 119877119904 (119905) cos (120593) minus radic1198772119905 minus 1198772119904 (119905) sin (120593) (1)
where 120593 is the look angle of radar (shown in Figure 1) 119877119904(119905)
and 119877119905are the magnitudes of Rs(119905) and Rt(119905) respectively
Note that 119877119905is a constant that is the length of the Earthrsquos
radius The formula of 119877119904(119905) is given by the literature [9]
The Doppler centroid 119891dc of the beam center point alongthe orbit is given by the literature [7]
119891dc (119905) = minus2
120582
Rst (119905) sdot Rst (119905)1003816100381610038161003816Rst (119905)
1003816100381610038161003816
= minus2
120582
(Rs (119905) minus Rt (119905)) sdot (Rs (119905) minus Rt (119905))1003816100381610038161003816Rs (119905) minus Rt (119905)
1003816100381610038161003816
(2)
where 120582 is the radar wavelength the symbol || indicates thevector magnitude Noting that Rt(119905) = 0 in the ERC theformula of the Doppler centroid can be rewritten as
119891dc (119905) = minus2
120582
(Rs (119905) minus Rt (119905)) sdot Rs (119905)1003816100381610038161003816Rs (119905) minus Rt (119905)
1003816100381610038161003816
(3)
It is apparent that the Doppler centroid 119891dc(119905) is not onlydetermined by the satellite position but also dependent onthe position of the BCP Both are important for the analyticalderivation of the 2D attitude steering angles which will beshown in Section 3
To obtain the analytic formula for the position vectorof the BCP it is needed to find the relationship betweenthe satellite and the BCP in the satellite local coordinatesystem (SCS) 119878-119909
119900119910119900119911119900(see Figure 1) The SCS is defined
as the coordinate origin is the center of the satellite massthe 119878119911
119900-axis is along the satellite position vector towards the
Earthrsquos center the axis of 119878119909119900is perpendicular to the 119878119911
119900-axis
in the orbital plane (the angle between the 119878119909119900axis and the
satellite velocity vector is less than 90∘) and the 119878119910119900-axis obeys
the right-hand rule The formula for the slant range vector ofthe BCP in the SCS can be expressed as
Rst (119905) = [119877st (119905) sin (120593) cos (120579 (119905))
minus119877st (119905) sin (120593) sin (120579 (119905)) 119877st (119905) cos (120593)]119879
(4)
where 120579(119905) is the angle between the axis 119878119909119900and the projection
of the beam pointing vector in the 119909119900-119910119900plane (as shown in
Figure 1) and can be presented as
120579 (119905) = arccos(sin (120579119904)
cos (120595 (119905))) (5)
where 120579119904is the squint angle of radar and 120595(119905) is the angle
between the 119878119909119900-axis and the satellite velocity vector
120595 (119905) = arccos( Rs (119905) sdot Rs (119905)1003816100381610038161003816Rs (119905)
1003816100381610038161003816 sdot10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) minus120587
2 (6)
The position equation of the BCP in the Earth rectangularcoordinate is given by
Rt (119905) = [
[
119883t (119905)119884t (119905)119885t (119905)
]
]
=WA (119905) timesWB timesWc (119905) times Rsp (119905) (7)
International Journal of Antennas and Propagation 3
where
WA (119905) = [
[
cos (119908119890sdot 119905) sin (119908
119890sdot 119905) 0
minus sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]
]
WB = [
[
cos (Ω0) minus sin (Ω
0) 0
sin (Ω0) cos (Ω
0) 0
0 0 1
]
]
times [
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]
]
times [
[
cos (1205960) minus sin (120596
0) 0
sin (1205960) cos (120596
0) 0
0 0 1
]
]
Wc (119905) = [
[
cos (119891 (119905)) minus sin (119891 (119905)) 0sin (119891 (119905)) cos (119891 (119905)) 0
0 0 1
]
]
Rsp (119905) = [
[
0 0 minus1
1 0 0
0 minus1 0
]
]
times Rst (119905) + [
[
119877119904(119905)
0
0
]
]
(8)
where the symbol times represents cross product119908119890is the Earthrsquos
angular velocity 119894 indicates the orbit inclination Ω0is the
longitude of ascending node 1205960represents the argument of
perigee and 119891(119905) indicates the argument of latitude (ie thesum of the true anomaly and the perigee argument)
3 Zero-Doppler Centroid Control
As we known when the angle 120579 = 90∘ the beam-pointing
vector is perpendicular to the velocity vector of satellite andRst(119905) sdot Rst(119905) = 0 in (2) However owing to the influences ofearth rotation and elliptical orbit sometimesRst(119905)sdotRst(119905) = 0especially in GEO SAR and it affects the quality of image bythe residual Doppler centroid Fortunately it can be resolvedby steering the satellitersquos attitude angles to reduce the offset ofthe Doppler centroid
The geometry of the spaceborne radar after zero-Dopplercentroid control is illustrated in Figure 2 in which the radarobserves the Earthrsquos surface with the look angle 120593 120572 is theangle of instance 120573 is the geocentric angle which is given by
120573 (119905) = arcsin [119877119904(119905)
119877119905
sin (120593)] minus 120593 (9)
The distance between the radar and the BCP over theorbital period can be calculated by
1003816100381610038161003816Rst (119905)1003816100381610038161003816
2
=1003816100381610038161003816Rs (119905)
1003816100381610038161003816
2
+1003816100381610038161003816Rt (119905)
1003816100381610038161003816
2
minus 21003816100381610038161003816Rs (119905)
10038161003816100381610038161003816100381610038161003816Rt (119905)
1003816100381610038161003816 cos (120573 (119905)) (10)
After the attitude steering the relative velocity vectorbetween the satellite and the BCP is perpendicular to therelative position vector According to the properties of thevector inner product we have
Rst (119905) sdot Rs (119905) = 0 (11)
Earth
Equator
Beam centerpoint
O
120572
120573
120593
R119956
R119956
Rst
R119957
Figure 2 Geometry of the satellite after zero-Doppler centroidcontrol
Then combining the aforementioned expressions theposition equation of the new beam center point (after the atti-tude steering) in ERCwhich is expressed as [119909 (119905) 119910 (119905) 119911(119905)]for the convenience of clarity can be calculated by thefollowing equations
1199092
(119905) + 1199102
(119905) + 1199112
(119905) = 1198772
119905
(119909 (119905) minus 119909119904(119905))2
+ (119910 (119905) minus 119910119904(119905))2
+ (119911 (119905) minus 119911119904(119905))2
= 1198772
119904(119905) + 119877
2
119905minus 2119877119904(119905) 119877119905cos (120573 (119905))
(119909 (119905) minus 119909119904(119905)) 119904(119905) + (119910 (119905) minus 119910
119904(119905)) 119910119904(119905)
+ (119911 (119905) minus 119911119904(119905)) 119904(119905) = 0
(12)
where the position vector of the satellite [119909119904(119905) 119910119904(119905) 119911119904(119905)]
and its velocity vector [119904(119905) 119910119904(119905) 119904(119905)] are given by the
literature [10] 119909(119905) 119910(119905) and 119911(119905) are solved as follows
119909 (119905) =119861 (119905) 119909
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119909
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119910119904(119905) 119904(119905) minus 119910
119904(119905) 119911119904(119905)
1198772119904(119905)
119862 (119905)
4 International Journal of Antennas and Propagation
119910 (119905) =119861 (119905) 119910
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 1199102
119904(119905) 119860 (119905) minus 119910
119904(119905) 1198602
(119905) minus 119910119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119911119904(119905) 119904(119905) minus
119904(119905) 119909119904(119905)
1198772119904(119905)
119862 (119905)
119911 (119905) =119861 (119905) 119911
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119911
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119909119904(119905) 119910119904(119905) minus 119910
119904(119905) 119904(119905)
1198772119904(119905)
119862 (119905)
(13)
where
119860 (119905) = 119909119904(119905) 119904(119905) + 119910
119904(119905) 119910119904(119905) + 119911
119904(119905) 119904(119905)
119861 (119905) = 119877119904(119905) 119877119905cos (120573 (119905))
119862 (119905)
= radic1198772119904(119905) 1198772
119905sin2 (120573 (119905)) minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
(14)
In (13) 119896 = +1 denotes the radar looks from the left-sidewhile 119896 = minus1means the radar is right looking
Under the condition of circular orbit 119860(119905) = 0 and (13)can have solutions For an elliptical orbit SAR like GEOSAR the necessary and sufficient condition when (13) hassolutions is that the square root terms in 119862(119905) need to meetthe following requirements
1198772
119904(119905) 1198772
119905sin2 (120573 (119905))
minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
ge 0
(15)
Meanwhile to ensure the observation of a target fixedon the Earth by a space-borne SAR the following inequalityneed to be satisfied
minus arcsin(119877119905
119877119904(119905)) le 120601 (119905) le arcsin(
119877119905
119877119904(119905)) (16)
Combining (15) and (16) without the loss of generalitythe range of the look angle is expressed as
arcsin( |119860 (119905)|
119877119904(119905)10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) le1003816100381610038161003816120593 (119905)
1003816100381610038161003816 le arcsin(119877119905
119877119904(119905)) (17)
0 50 100 150 200 250 300 350minus1500
minus1000
minus500
0
500
1000
1500
Argument of Latitude (deg)
fdc (
Hz)
No attitude steering2D attitude steering
Perigee Apogee
Figure 3 Comparison of the Doppler residuals before and after theattitude steering
Through the transformation matrix between the SCS andthe ERC the track of the new beam center point in the SCScan be calculated by
[
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
= [
[
0 1 0
0 0 minus1
minus1 0 0
]
]
times UA (119905) times UB times UC (119905)
times [
[
119909 (119905)
119910 (119905)
119911 (119905)
]
]
+ [
[
0
0
119903 (119905)
]
]
(18)
where
UA (119905) = [
[
cos (119891 (119905)) sin (119891 (119905)) 0
minus sin (119891 (119905)) cos (119891 (119905)) 00 0 1
]
]
UB =[[
[
cos (1205960) sin (120596
0) 0
minus sin (1205960) cos (120596
0) 0
0 0 1
]]
]
times[[
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]]
]
times[[
[
cos (Ω0) sin (Ω
0) 0
minus sin (Ω0) cos (Ω
0) 0
0 0 1
]]
]
UC (119905) =[[
[
cos (119908119890sdot 119905) minus sin (119908
119890sdot 119905) 0
sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]]
]
(19)
International Journal of Antennas and Propagation 5
minus4
minus3
minus2
minus1
0
1
2
3
4
Argument of Latitude (deg)
Pitc
h an
gle (
deg)
Perigee Apogee
0 50 100 150 200 250 300 350
(a)
0 50 100 150 200 250 300 350minus25
minus2
minus15
minus1
minus05
0
Argument of Latitude (deg)
Roll
angl
e (de
g)
Perigee Apogee
(b)
Figure 4 The pitch angles and the roll angles of the 2D method along the orbit
0
20
40
60
80
minus60
minus40
minus20
0 20 40 60 80
Longitude (deg)
Latit
ude (
deg)
Track of the nadir pointTrack of the ldquobeam centerrdquo before the attitude steeringTrack of the ldquobeam centerrdquo
Perigeepoint
Startingpoint
after the attitude steering
Figure 5 Comparisons of the track of the nadir point and two tracksof the BCP before and after the attitude steering
Then combining (4) the transformation matrixesbetween the track of the new BCP and the track of theoriginal one in the SCS can be presented as
[
[
1 0 0
0 cos (120579119883(119905)) minus sin (120579
119883(119905))
0 sin (120579119883(119905)) cos (120579
119883(119905))
]
]
times [
[
cos (120579119884(119905)) 0 sin (120579
119884(119905))
0 1 0
minus sin (120579119884(119905)) 0 cos (120579
119884(119905))
]
]
times [
[
119877st sin (120593) cos (120579)minus119877st sin (120593) sin (120579)
119877st cos (120593)]
]
= [
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
(20)
where 120579119884(119905) is the angle that the satellite rotates around the
axis of 119878119910119900and 120579
119883(119905) is the angle that the satellite rotates
around the axis of 119878119909119900 Based on the relationship between the
attitude steering angles and the axis angles (120579119883(119905) and 120579
119884(119905))
in (20) the pitch steering angle 120579119875(119905) and the roll steering
angle 120579119877(119905) can be expressed as
120579119875(119905)=arcsin(
1199090(119905)
119877st (119905)) minus arcsin (sin (120593) cos (120579 (119905))) minus 120595 (119905)
120579119877(119905) = minus arcsin(
1199100(119905)
119877st (119905) sdot cos (120579119875 (119905)))
minus arcsin(sin (120593) sin (120579 (119905))
radic1 minus sin2 (120593) cos2 (120579 (119905)))
(21)
4 Simulation and Analysis
For investigations of the numerically applied 2D steeringmethod the relevant orbit parameters of GEO SAR as listedin Table 1 are used
Before the 2D attitude steering the Doppler centroid 119891dcvaries along the orbit as the blue line shown in Figure 3 Thenon-zero-Doppler centroid is caused by Earthrsquos rotation andthe elliptical orbit The red line in Figure 3 shows that 119891dccan be perfectly compensated to zero by using the approachpresented in this paper
In simulations the GEO satellite starts at the ascendingnode and the radar is left looking during the orbital periodFigure 4 depicts the two attitude angles of the proposedmethod which can minimize the Doppler centroid shifts InFigure 4 the positivenegative values of the angle indicate theangles that the satellite rotates around its axis anticlockwiseclockwise It is apparent that both the attitude angles varywithin a small range of degreesThemaximum pitch steering
6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 3
where
WA (119905) = [
[
cos (119908119890sdot 119905) sin (119908
119890sdot 119905) 0
minus sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]
]
WB = [
[
cos (Ω0) minus sin (Ω
0) 0
sin (Ω0) cos (Ω
0) 0
0 0 1
]
]
times [
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]
]
times [
[
cos (1205960) minus sin (120596
0) 0
sin (1205960) cos (120596
0) 0
0 0 1
]
]
Wc (119905) = [
[
cos (119891 (119905)) minus sin (119891 (119905)) 0sin (119891 (119905)) cos (119891 (119905)) 0
0 0 1
]
]
Rsp (119905) = [
[
0 0 minus1
1 0 0
0 minus1 0
]
]
times Rst (119905) + [
[
119877119904(119905)
0
0
]
]
(8)
where the symbol times represents cross product119908119890is the Earthrsquos
angular velocity 119894 indicates the orbit inclination Ω0is the
longitude of ascending node 1205960represents the argument of
perigee and 119891(119905) indicates the argument of latitude (ie thesum of the true anomaly and the perigee argument)
3 Zero-Doppler Centroid Control
As we known when the angle 120579 = 90∘ the beam-pointing
vector is perpendicular to the velocity vector of satellite andRst(119905) sdot Rst(119905) = 0 in (2) However owing to the influences ofearth rotation and elliptical orbit sometimesRst(119905)sdotRst(119905) = 0especially in GEO SAR and it affects the quality of image bythe residual Doppler centroid Fortunately it can be resolvedby steering the satellitersquos attitude angles to reduce the offset ofthe Doppler centroid
The geometry of the spaceborne radar after zero-Dopplercentroid control is illustrated in Figure 2 in which the radarobserves the Earthrsquos surface with the look angle 120593 120572 is theangle of instance 120573 is the geocentric angle which is given by
120573 (119905) = arcsin [119877119904(119905)
119877119905
sin (120593)] minus 120593 (9)
The distance between the radar and the BCP over theorbital period can be calculated by
1003816100381610038161003816Rst (119905)1003816100381610038161003816
2
=1003816100381610038161003816Rs (119905)
1003816100381610038161003816
2
+1003816100381610038161003816Rt (119905)
1003816100381610038161003816
2
minus 21003816100381610038161003816Rs (119905)
10038161003816100381610038161003816100381610038161003816Rt (119905)
1003816100381610038161003816 cos (120573 (119905)) (10)
After the attitude steering the relative velocity vectorbetween the satellite and the BCP is perpendicular to therelative position vector According to the properties of thevector inner product we have
Rst (119905) sdot Rs (119905) = 0 (11)
Earth
Equator
Beam centerpoint
O
120572
120573
120593
R119956
R119956
Rst
R119957
Figure 2 Geometry of the satellite after zero-Doppler centroidcontrol
Then combining the aforementioned expressions theposition equation of the new beam center point (after the atti-tude steering) in ERCwhich is expressed as [119909 (119905) 119910 (119905) 119911(119905)]for the convenience of clarity can be calculated by thefollowing equations
1199092
(119905) + 1199102
(119905) + 1199112
(119905) = 1198772
119905
(119909 (119905) minus 119909119904(119905))2
+ (119910 (119905) minus 119910119904(119905))2
+ (119911 (119905) minus 119911119904(119905))2
= 1198772
119904(119905) + 119877
2
119905minus 2119877119904(119905) 119877119905cos (120573 (119905))
(119909 (119905) minus 119909119904(119905)) 119904(119905) + (119910 (119905) minus 119910
119904(119905)) 119910119904(119905)
+ (119911 (119905) minus 119911119904(119905)) 119904(119905) = 0
(12)
where the position vector of the satellite [119909119904(119905) 119910119904(119905) 119911119904(119905)]
and its velocity vector [119904(119905) 119910119904(119905) 119904(119905)] are given by the
literature [10] 119909(119905) 119910(119905) and 119911(119905) are solved as follows
119909 (119905) =119861 (119905) 119909
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119909
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119910119904(119905) 119904(119905) minus 119910
119904(119905) 119911119904(119905)
1198772119904(119905)
119862 (119905)
4 International Journal of Antennas and Propagation
119910 (119905) =119861 (119905) 119910
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 1199102
119904(119905) 119860 (119905) minus 119910
119904(119905) 1198602
(119905) minus 119910119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119911119904(119905) 119904(119905) minus
119904(119905) 119909119904(119905)
1198772119904(119905)
119862 (119905)
119911 (119905) =119861 (119905) 119911
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119911
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119909119904(119905) 119910119904(119905) minus 119910
119904(119905) 119904(119905)
1198772119904(119905)
119862 (119905)
(13)
where
119860 (119905) = 119909119904(119905) 119904(119905) + 119910
119904(119905) 119910119904(119905) + 119911
119904(119905) 119904(119905)
119861 (119905) = 119877119904(119905) 119877119905cos (120573 (119905))
119862 (119905)
= radic1198772119904(119905) 1198772
119905sin2 (120573 (119905)) minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
(14)
In (13) 119896 = +1 denotes the radar looks from the left-sidewhile 119896 = minus1means the radar is right looking
Under the condition of circular orbit 119860(119905) = 0 and (13)can have solutions For an elliptical orbit SAR like GEOSAR the necessary and sufficient condition when (13) hassolutions is that the square root terms in 119862(119905) need to meetthe following requirements
1198772
119904(119905) 1198772
119905sin2 (120573 (119905))
minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
ge 0
(15)
Meanwhile to ensure the observation of a target fixedon the Earth by a space-borne SAR the following inequalityneed to be satisfied
minus arcsin(119877119905
119877119904(119905)) le 120601 (119905) le arcsin(
119877119905
119877119904(119905)) (16)
Combining (15) and (16) without the loss of generalitythe range of the look angle is expressed as
arcsin( |119860 (119905)|
119877119904(119905)10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) le1003816100381610038161003816120593 (119905)
1003816100381610038161003816 le arcsin(119877119905
119877119904(119905)) (17)
0 50 100 150 200 250 300 350minus1500
minus1000
minus500
0
500
1000
1500
Argument of Latitude (deg)
fdc (
Hz)
No attitude steering2D attitude steering
Perigee Apogee
Figure 3 Comparison of the Doppler residuals before and after theattitude steering
Through the transformation matrix between the SCS andthe ERC the track of the new beam center point in the SCScan be calculated by
[
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
= [
[
0 1 0
0 0 minus1
minus1 0 0
]
]
times UA (119905) times UB times UC (119905)
times [
[
119909 (119905)
119910 (119905)
119911 (119905)
]
]
+ [
[
0
0
119903 (119905)
]
]
(18)
where
UA (119905) = [
[
cos (119891 (119905)) sin (119891 (119905)) 0
minus sin (119891 (119905)) cos (119891 (119905)) 00 0 1
]
]
UB =[[
[
cos (1205960) sin (120596
0) 0
minus sin (1205960) cos (120596
0) 0
0 0 1
]]
]
times[[
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]]
]
times[[
[
cos (Ω0) sin (Ω
0) 0
minus sin (Ω0) cos (Ω
0) 0
0 0 1
]]
]
UC (119905) =[[
[
cos (119908119890sdot 119905) minus sin (119908
119890sdot 119905) 0
sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]]
]
(19)
International Journal of Antennas and Propagation 5
minus4
minus3
minus2
minus1
0
1
2
3
4
Argument of Latitude (deg)
Pitc
h an
gle (
deg)
Perigee Apogee
0 50 100 150 200 250 300 350
(a)
0 50 100 150 200 250 300 350minus25
minus2
minus15
minus1
minus05
0
Argument of Latitude (deg)
Roll
angl
e (de
g)
Perigee Apogee
(b)
Figure 4 The pitch angles and the roll angles of the 2D method along the orbit
0
20
40
60
80
minus60
minus40
minus20
0 20 40 60 80
Longitude (deg)
Latit
ude (
deg)
Track of the nadir pointTrack of the ldquobeam centerrdquo before the attitude steeringTrack of the ldquobeam centerrdquo
Perigeepoint
Startingpoint
after the attitude steering
Figure 5 Comparisons of the track of the nadir point and two tracksof the BCP before and after the attitude steering
Then combining (4) the transformation matrixesbetween the track of the new BCP and the track of theoriginal one in the SCS can be presented as
[
[
1 0 0
0 cos (120579119883(119905)) minus sin (120579
119883(119905))
0 sin (120579119883(119905)) cos (120579
119883(119905))
]
]
times [
[
cos (120579119884(119905)) 0 sin (120579
119884(119905))
0 1 0
minus sin (120579119884(119905)) 0 cos (120579
119884(119905))
]
]
times [
[
119877st sin (120593) cos (120579)minus119877st sin (120593) sin (120579)
119877st cos (120593)]
]
= [
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
(20)
where 120579119884(119905) is the angle that the satellite rotates around the
axis of 119878119910119900and 120579
119883(119905) is the angle that the satellite rotates
around the axis of 119878119909119900 Based on the relationship between the
attitude steering angles and the axis angles (120579119883(119905) and 120579
119884(119905))
in (20) the pitch steering angle 120579119875(119905) and the roll steering
angle 120579119877(119905) can be expressed as
120579119875(119905)=arcsin(
1199090(119905)
119877st (119905)) minus arcsin (sin (120593) cos (120579 (119905))) minus 120595 (119905)
120579119877(119905) = minus arcsin(
1199100(119905)
119877st (119905) sdot cos (120579119875 (119905)))
minus arcsin(sin (120593) sin (120579 (119905))
radic1 minus sin2 (120593) cos2 (120579 (119905)))
(21)
4 Simulation and Analysis
For investigations of the numerically applied 2D steeringmethod the relevant orbit parameters of GEO SAR as listedin Table 1 are used
Before the 2D attitude steering the Doppler centroid 119891dcvaries along the orbit as the blue line shown in Figure 3 Thenon-zero-Doppler centroid is caused by Earthrsquos rotation andthe elliptical orbit The red line in Figure 3 shows that 119891dccan be perfectly compensated to zero by using the approachpresented in this paper
In simulations the GEO satellite starts at the ascendingnode and the radar is left looking during the orbital periodFigure 4 depicts the two attitude angles of the proposedmethod which can minimize the Doppler centroid shifts InFigure 4 the positivenegative values of the angle indicate theangles that the satellite rotates around its axis anticlockwiseclockwise It is apparent that both the attitude angles varywithin a small range of degreesThemaximum pitch steering
6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Antennas and Propagation
119910 (119905) =119861 (119905) 119910
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 1199102
119904(119905) 119860 (119905) minus 119910
119904(119905) 1198602
(119905) minus 119910119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119911119904(119905) 119904(119905) minus
119904(119905) 119909119904(119905)
1198772119904(119905)
119862 (119905)
119911 (119905) =119861 (119905) 119911
119904(119905)
1198772119904(119905)
+1198772
119904(119905) 2
119904(119905) 119860 (119905) minus 119911
119904(119905) 1198602
(119905) minus 119904(119905) 119860 (119905) 119861 (119905)
1198772119904(119905) (2119904(119905) + 1199102
119904(119905) + 2
119904(119905))
+ 119896119909119904(119905) 119910119904(119905) minus 119910
119904(119905) 119904(119905)
1198772119904(119905)
119862 (119905)
(13)
where
119860 (119905) = 119909119904(119905) 119904(119905) + 119910
119904(119905) 119910119904(119905) + 119911
119904(119905) 119904(119905)
119861 (119905) = 119877119904(119905) 119877119905cos (120573 (119905))
119862 (119905)
= radic1198772119904(119905) 1198772
119905sin2 (120573 (119905)) minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
(14)
In (13) 119896 = +1 denotes the radar looks from the left-sidewhile 119896 = minus1means the radar is right looking
Under the condition of circular orbit 119860(119905) = 0 and (13)can have solutions For an elliptical orbit SAR like GEOSAR the necessary and sufficient condition when (13) hassolutions is that the square root terms in 119862(119905) need to meetthe following requirements
1198772
119904(119905) 1198772
119905sin2 (120573 (119905))
minus
1198602
(119905) (1198772
119905+ 119877119904(119905)2
minus 2119861 (119905))
(2119904(119905) + 1199102
119904(119905) + 2
119904(119905))2
ge 0
(15)
Meanwhile to ensure the observation of a target fixedon the Earth by a space-borne SAR the following inequalityneed to be satisfied
minus arcsin(119877119905
119877119904(119905)) le 120601 (119905) le arcsin(
119877119905
119877119904(119905)) (16)
Combining (15) and (16) without the loss of generalitythe range of the look angle is expressed as
arcsin( |119860 (119905)|
119877119904(119905)10038161003816100381610038161003816Rs (119905)
10038161003816100381610038161003816
) le1003816100381610038161003816120593 (119905)
1003816100381610038161003816 le arcsin(119877119905
119877119904(119905)) (17)
0 50 100 150 200 250 300 350minus1500
minus1000
minus500
0
500
1000
1500
Argument of Latitude (deg)
fdc (
Hz)
No attitude steering2D attitude steering
Perigee Apogee
Figure 3 Comparison of the Doppler residuals before and after theattitude steering
Through the transformation matrix between the SCS andthe ERC the track of the new beam center point in the SCScan be calculated by
[
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
= [
[
0 1 0
0 0 minus1
minus1 0 0
]
]
times UA (119905) times UB times UC (119905)
times [
[
119909 (119905)
119910 (119905)
119911 (119905)
]
]
+ [
[
0
0
119903 (119905)
]
]
(18)
where
UA (119905) = [
[
cos (119891 (119905)) sin (119891 (119905)) 0
minus sin (119891 (119905)) cos (119891 (119905)) 00 0 1
]
]
UB =[[
[
cos (1205960) sin (120596
0) 0
minus sin (1205960) cos (120596
0) 0
0 0 1
]]
]
times[[
[
1 0 0
0 cos (119894) sin (119894)0 minus sin (119894) cos (119894)
]]
]
times[[
[
cos (Ω0) sin (Ω
0) 0
minus sin (Ω0) cos (Ω
0) 0
0 0 1
]]
]
UC (119905) =[[
[
cos (119908119890sdot 119905) minus sin (119908
119890sdot 119905) 0
sin (119908119890sdot 119905) cos (119908
119890sdot 119905) 0
0 0 1
]]
]
(19)
International Journal of Antennas and Propagation 5
minus4
minus3
minus2
minus1
0
1
2
3
4
Argument of Latitude (deg)
Pitc
h an
gle (
deg)
Perigee Apogee
0 50 100 150 200 250 300 350
(a)
0 50 100 150 200 250 300 350minus25
minus2
minus15
minus1
minus05
0
Argument of Latitude (deg)
Roll
angl
e (de
g)
Perigee Apogee
(b)
Figure 4 The pitch angles and the roll angles of the 2D method along the orbit
0
20
40
60
80
minus60
minus40
minus20
0 20 40 60 80
Longitude (deg)
Latit
ude (
deg)
Track of the nadir pointTrack of the ldquobeam centerrdquo before the attitude steeringTrack of the ldquobeam centerrdquo
Perigeepoint
Startingpoint
after the attitude steering
Figure 5 Comparisons of the track of the nadir point and two tracksof the BCP before and after the attitude steering
Then combining (4) the transformation matrixesbetween the track of the new BCP and the track of theoriginal one in the SCS can be presented as
[
[
1 0 0
0 cos (120579119883(119905)) minus sin (120579
119883(119905))
0 sin (120579119883(119905)) cos (120579
119883(119905))
]
]
times [
[
cos (120579119884(119905)) 0 sin (120579
119884(119905))
0 1 0
minus sin (120579119884(119905)) 0 cos (120579
119884(119905))
]
]
times [
[
119877st sin (120593) cos (120579)minus119877st sin (120593) sin (120579)
119877st cos (120593)]
]
= [
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
(20)
where 120579119884(119905) is the angle that the satellite rotates around the
axis of 119878119910119900and 120579
119883(119905) is the angle that the satellite rotates
around the axis of 119878119909119900 Based on the relationship between the
attitude steering angles and the axis angles (120579119883(119905) and 120579
119884(119905))
in (20) the pitch steering angle 120579119875(119905) and the roll steering
angle 120579119877(119905) can be expressed as
120579119875(119905)=arcsin(
1199090(119905)
119877st (119905)) minus arcsin (sin (120593) cos (120579 (119905))) minus 120595 (119905)
120579119877(119905) = minus arcsin(
1199100(119905)
119877st (119905) sdot cos (120579119875 (119905)))
minus arcsin(sin (120593) sin (120579 (119905))
radic1 minus sin2 (120593) cos2 (120579 (119905)))
(21)
4 Simulation and Analysis
For investigations of the numerically applied 2D steeringmethod the relevant orbit parameters of GEO SAR as listedin Table 1 are used
Before the 2D attitude steering the Doppler centroid 119891dcvaries along the orbit as the blue line shown in Figure 3 Thenon-zero-Doppler centroid is caused by Earthrsquos rotation andthe elliptical orbit The red line in Figure 3 shows that 119891dccan be perfectly compensated to zero by using the approachpresented in this paper
In simulations the GEO satellite starts at the ascendingnode and the radar is left looking during the orbital periodFigure 4 depicts the two attitude angles of the proposedmethod which can minimize the Doppler centroid shifts InFigure 4 the positivenegative values of the angle indicate theangles that the satellite rotates around its axis anticlockwiseclockwise It is apparent that both the attitude angles varywithin a small range of degreesThemaximum pitch steering
6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 5
minus4
minus3
minus2
minus1
0
1
2
3
4
Argument of Latitude (deg)
Pitc
h an
gle (
deg)
Perigee Apogee
0 50 100 150 200 250 300 350
(a)
0 50 100 150 200 250 300 350minus25
minus2
minus15
minus1
minus05
0
Argument of Latitude (deg)
Roll
angl
e (de
g)
Perigee Apogee
(b)
Figure 4 The pitch angles and the roll angles of the 2D method along the orbit
0
20
40
60
80
minus60
minus40
minus20
0 20 40 60 80
Longitude (deg)
Latit
ude (
deg)
Track of the nadir pointTrack of the ldquobeam centerrdquo before the attitude steeringTrack of the ldquobeam centerrdquo
Perigeepoint
Startingpoint
after the attitude steering
Figure 5 Comparisons of the track of the nadir point and two tracksof the BCP before and after the attitude steering
Then combining (4) the transformation matrixesbetween the track of the new BCP and the track of theoriginal one in the SCS can be presented as
[
[
1 0 0
0 cos (120579119883(119905)) minus sin (120579
119883(119905))
0 sin (120579119883(119905)) cos (120579
119883(119905))
]
]
times [
[
cos (120579119884(119905)) 0 sin (120579
119884(119905))
0 1 0
minus sin (120579119884(119905)) 0 cos (120579
119884(119905))
]
]
times [
[
119877st sin (120593) cos (120579)minus119877st sin (120593) sin (120579)
119877st cos (120593)]
]
= [
[
1199090(119905)
1199100(119905)
1199110(119905)
]
]
(20)
where 120579119884(119905) is the angle that the satellite rotates around the
axis of 119878119910119900and 120579
119883(119905) is the angle that the satellite rotates
around the axis of 119878119909119900 Based on the relationship between the
attitude steering angles and the axis angles (120579119883(119905) and 120579
119884(119905))
in (20) the pitch steering angle 120579119875(119905) and the roll steering
angle 120579119877(119905) can be expressed as
120579119875(119905)=arcsin(
1199090(119905)
119877st (119905)) minus arcsin (sin (120593) cos (120579 (119905))) minus 120595 (119905)
120579119877(119905) = minus arcsin(
1199100(119905)
119877st (119905) sdot cos (120579119875 (119905)))
minus arcsin(sin (120593) sin (120579 (119905))
radic1 minus sin2 (120593) cos2 (120579 (119905)))
(21)
4 Simulation and Analysis
For investigations of the numerically applied 2D steeringmethod the relevant orbit parameters of GEO SAR as listedin Table 1 are used
Before the 2D attitude steering the Doppler centroid 119891dcvaries along the orbit as the blue line shown in Figure 3 Thenon-zero-Doppler centroid is caused by Earthrsquos rotation andthe elliptical orbit The red line in Figure 3 shows that 119891dccan be perfectly compensated to zero by using the approachpresented in this paper
In simulations the GEO satellite starts at the ascendingnode and the radar is left looking during the orbital periodFigure 4 depicts the two attitude angles of the proposedmethod which can minimize the Doppler centroid shifts InFigure 4 the positivenegative values of the angle indicate theangles that the satellite rotates around its axis anticlockwiseclockwise It is apparent that both the attitude angles varywithin a small range of degreesThemaximum pitch steering
6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Antennas and Propagation
0 50 100 150 200 250 300 3500
02
04
06
08
1
Argument of Latitude (deg)
Min
angl
e (de
g)
Perigee Apogee
t1 t2 t3 t4
(a)
0 50 100 150 200 250 300 35084
85
86
87
88
89
Argument of Latitude (deg)
Max
angl
e (de
g)
Perigee
Apogee
(b)
Figure 6The effective look angles of the zero-Doppler centroid control along the orbit (a) Minimum value of the look angle (b) maximumvalue of the look angle
0 0025 005 0075 01 0125 0150
1
2
3
4
5
6
7
8
9
10
Orbital eccentricity
Min
imum
dow
n lo
ok an
gle (
deg)
120596 = 30∘
120596 = 40∘
120596 = 50∘
120596 = 60∘
120596 = 70∘
120596 = 80∘
120596 = 90∘
(a)
74
76
78
8
82
84
86
88
9
Max
imum
dow
n lo
ok an
gle (
deg)
0 0025 005 0075 01 0125 015
Orbital eccentricity
(b)
Figure 7 Relationship between the range of the look angle and the orbit parameters (a) Minimum look angle variation with the eccentricityat different arguments of perigee (b) Maximum look angle variation with the eccentricity
angle is about 37∘ and the maximum roll steering angleis nearly 24∘ As can be seen there is no demand on theattitude steering when the satellite platform lies in the perigeeor apogee because the relative velocity of the satellite isperpendicular to the beam direction at that moment
Figure 5 depicts the tracks of the BCP before and afterthe attitude steering and the track of the nadir point in theEarthrsquos Latitude and Longitude Coordinate represented bythe red blue and green dotted lines The red blue and greenlines describe these three tracks (from the starting point to
the perigee point) during the time that the satellite runs fromthe ascending node to the perigee
As can be seen from Figure 5 there is a great differencebetween the red and blue lines at the starting point wherethe residual Doppler centroid is great After that the red andblue lines come together at the perigee point which meansthat there is no demand on the zero-Doppler centroid controlwhen the satellite reaches its absolute perigee
Figure 6 shows the effective range of the look angle 120593along the orbit Specifically the look angle should not be less
International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 7
Table 1 System parameters of GEO SAR
Specification ValueSemimajor axis 42220000mOrbit inclination 60 degreesOrbit eccentricity 002Argument of perigee 90 degreesRight ascension of ascending node 40 degreesLook angle 25 degreesBeam width 048 degreesSignal wavelength 025mAntenna diameter 30mPulse repetition frequency 250Hz
than the minimum angle (the blue line shown in Figure 6(a))and not be greater than the maximum angle (shown inFigure 6(b)) If the look angle is 06∘ after attitude steeringas the green line shown in Figure 6(a) the zero-Dopplercentroid control is effective only during the time [119905
1 1199052] and
[1199053 1199054] Therefore it is needed to take the effective range
into account when the zero-Doppler centroid method isperformed
According to (17) the orbit parameters have a bearing onthe range of look angle Figure 7(a) illustrates the relationshipbetween the minimum look angle and the orbital eccentricityat different arguments of perigee There is an upward trendof the minimum look angle with the increase of eccentricityat all arguments of perigee As the argument of perigee is90∘ the minimum value grows at the lowest speed and ithas the fastest growth rate when the argument of perigee is60∘ According to (16) the maximum value of the look angleonly relates to 119877
119905and 119877
119904(119905) and it decreases with increasing
the orbital eccentricity (shown in Figure 7(b)) Generally theminimum value is supposed to be less than the maximumone Otherwise the radar beammay radiate the space outsidethe Earth after the zero-Doppler centroid control as in thecase that the eccentricity is about 014 and 120596
0= 90∘
5 Conclusion
The contribution of this paper is that it introduces theeffective range of the look angle in which the zero-Dopplercentroid control is feasible for GEO SAR system Meanwhilea new calculation approach is proposed for the attitudesteering anglesThe 2Dmethod combining the pitch steeringwith roll steering provides a new implementation for thesatellite attitude control This approach is deduced fromthe aspect of the Earth observation rather than the satellitemotion modelTherefore it is suitable for general Earth orbitSAR system Simulations validate the expressions derived andthe proposed zero-Doppler centroid control method Lastlythe relationship between the range of the look angle and theorbital parameters is illustrated which would be helpful forthe design of the satellite orbit
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was financially supported by the National NaturalScience Foundation of China (61201308) and the sponsoringof the Aerospace Science and Technology Innovation Fundwas acknowledged
References
[1] X Dong Y Gao C Hu T Zeng and D Chao ldquoEffects of Earthrotation on GEO SAR characteristics analysisrdquo in Proceedingsof the 6th International Conference on Radar (RADAR rsquo11) vol1 pp 34ndash37 October 2011
[2] R K Raney ldquoDoppler properties of radars in circular orbitrdquoInternational Journal of Remote Sensing vol 7 no 9 pp 1153ndash1162 1986
[3] E Boerner H Fiedler G Krieger and J Mittermayer ldquoA newmethod for total zero doppler steeringrdquo in Proceedings of theIEEE International Geoscience and Remote Sensing Symposium(IGARSS rsquo04) pp 1526ndash1529 September 2004
[4] H Fiedler E Boerner J Mittermayer and G Krieger ldquoTotalZero Doppler steering a new method for minimizing theDoppler centroidrdquo IEEE Geoscience and Remote Sensing Lettersvol 2 no 2 pp 141ndash145 2005
[5] Y Ze Z Yinqing C Jie et al ldquoA new satellite attitude steeringapproach for zero Doppler centroidrdquo in Proceedings of the IETInternational Radar Conference pp 1ndash4 April 2009
[6] Y J Zhang Y S ZhangH F Huang and ZDong ldquoResearch onelliptic orbit total zero Doppler steeringrdquo in Proceedings of the8th European Conference on Synthetic Aperture Radar (EUSARrsquo10) pp 1ndash4 Aachen Germany 2010
[7] X Dong Z Ding and Z Zhao ldquoA method of zero Dopplercentroid controlrdquo in Proceedings of the 8th European Conferenceon Synthetic Aperture Radar (EUSAR rsquo10) pp 1ndash4 VDE 2010
[8] T Long X Dong C Hu and T Zeng ldquoA new method of zero-doppler centroid control in GEO SARrdquo IEEE Geoscience andRemote Sensing Letters vol 8 no 3 pp 512ndash516 2011
[9] L J Cantafio Space-Based Radar Handbook chapter 2 ArtechHouse 1989
[10] T Zeng W Yin L Zhao and Z Ding ldquoAn improved velocitycalculation model in GEO SAR systemrdquo in Proceedings of theIET International Radar Conference pp 1ndash5 2013
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of





![ALIGNMENT SCHEMATIC PLAN - New Jersey...centroid n - [(centroid n - grid n)/combine scale factor]=north value modified local project coordinates centroid e - [(centroid e - grid e)/combined](https://img.pdfslide.us/doc/110x75/5ee18361ad6a402d666c5e4d/alignment-schematic-plan-new-jersey-centroid-n-centroid-n-grid-ncombine.jpg)