Embed Size (px)
Citation preview

Research ArticleStrong Tracking Filtering Algorithm of Randomly DelayedMeasurements for Nonlinear Systems
Hongtao Yang123 Huibin Gao1 and Xin Liu1
1Changchun Institute of Optics Fine Mechanics and Physics Chinese Academy of Sciences Changchun 130033 China2University of Chinese Academy of Sciences Beijing 100049 China3College of Electrical and Electronic Engineering Changchun University of Technology Changchun 130012 China
Correspondence should be addressed to Hongtao Yang hongtao 3110594126com
Received 17 June 2015 Revised 23 September 2015 Accepted 28 September 2015
Academic Editor Asier Ibeas
Copyright copy 2015 Hongtao Yang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper focuses on the filtering problems of nonlinear discrete-time stochastic dynamic systems such as themodel simplificationnoise characteristics uncertainty initial conditions uncertainty or system parametric variation Under these circumstances themeasurements of system have one sampling time random delay A new method that is strong tracking filtering algorithm ofrandomly delayed measurements (STFRDM) for nonlinear systems based on recursive operating by analytical computation andfirst-order linear approximations is proposed a principle of extended orthogonality is presented as a criterion of designing theSTFRDM and through the residuals between available and predicted measurements the formula of fading factor is obtainedUnder the premise of using the extended orthogonality principle STFRDM proposed in this paper can adjust the fading factoronline via calculating the covariance of residuals and then the gain matrices of the STFRDM adjust in real time to enhance theperformance of the proposed method Lastly in order to prove that the performance of STFRDM precedes existing EKF methodthe experiment of tracking maneuvering aircraft is carried out
1 Introduction
Filtering task is obtaining state variables from a series of noisymeasurements available online The main aim is to minimizethe estimation error which is referred to as the residual orinnovation vector
Currently most suboptimal methods for obtaining theposterior density in nonlinear discrete-time stochastic dyna-mic systems are using global and local approximation meth-ods Taking the point-mass filter based on adaptive algorithm[1] and particle filters with Gaussian mixtures based onGaussian mixture approximation [2] for example it is theadvantage of the global approximate approach that any clearassumption pertaining to the form of posterior density is notneeded Although the global methods have strong adaptabil-ity they suffer from enormous computational complexity Incontrast the local methods have simple design of the filterand fast implementing speed and the performance of thismethod is always with acceptable accuracy in actual applica-tions In local methods the form of posterior density usually
is assumed to be Gaussian Sometimes several local filters canbe derived without an assumption on the density (just thefirst two moments are required) such as extended Kalmanfilter or unscented Kalman filter Up till now there are plentyof variations about local methods of approximation such asthe extended Kalman filter (EKF) based on the method oflinearization [3] the central-difference Kalman filter (CDKF)based on the interpolationmethod [4] the unscentedKalmanfilter (UKF) based on the method of unscented transform[5] the quadrature Kalman filter (QKF) based on the ruleof Gauss-Hermite [6] and the cubature Kalman filter (CKF)based on the cubature rule of spherical-radial cubature [7]However since the aforementioned state estimationmethodsare all formulated under the assumption of statistics of thenoises and system parameters accurate modeling in realapplications they have some disadvantages for example theuncertainties in themodel initial conditions or noise charac-teristics may lead to bias in the estimation process In orderto overcome the above disadvantages one solution is to intro-duce fading factors in the state error covariance matrix based
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 869482 14 pageshttpdxdoiorg1011552015869482
2 Mathematical Problems in Engineering
on the residual sequenceThis method is named as the strongtracking filter (STF) which was proposed by Zhou and Frank[8ndash11]
In general all the above filtering estimations often con-sider the fact that in real time themeasurements generated bysystem are available but the measurements directly obtainedare affected by random delay in many actual applicationsTherefore the problem of filtering having randomly delayedmeasurements has been attracting wide attention [12ndash15] innonlinear state estimation In [12] two modified filteringalgorithms EKF and UKF with one sampling time randomlydelayed measurements have been proposed an improvedunscented filtering algorithm in [13] was proposed based ontwo-step randomly delayed measurements the literature [14]considered one-stage prediction filtering and fixed-pointsmoothing problems in nonlinear discrete-time stochasticsystems having one-step randomly delayedmeasurements inthis situation the recursive estimation algorithm that is thesignal produced by state-space model is uncertain and onlythe covariance information can be utilized has been pro-posed recently considering observations of one-step ran-domly delayed measurements a generic framework of Gaus-sian approximation (GA) filter has been given in [15]
To overcome the common disadvantages of filteringmethod having one-step randomly delayed measurementsand normal filtering method here a novel STFRDM is pro-posed an extended orthogonality principle is presented as acriterion of designing the STFRDM and through the resid-uals between available and predicted measurements theformula of fading factor is obtained Since the STFRDM canimplement the online tuning of the fading factor by monitor-ing the covariance of residuals the gain of the STFRDMwillbe adjusted in real time to enhance performance of ESFT
The structure of this paper is as follows The basis of the-ory and elementary knowledge about the existing EKF havingone-step randomly delayed measurements is reviewed inSection 2 Then the extended orthogonality principle whichis the basis of STFRDM is proposed in Section 3 There-after in Section 4 the STFRDM having one-step randomlydelayed measurements is derived In Section 5 simulationexperiment on tracking a maneuvering aircraft is imple-mented to compare the performance of the STFRDM withexisting EKF Finally Section 6 gives some conclusions
Throughout this paper 119864[sdot] stands for mathematicalexpectation 119868 stands for the unit matrix diagsdot sdot sdot denotesa block-diagonal matrix the superscripts minus1 119879 and and simrespectively denote the inverse matrix the matrix transpo-sition the estimate and the estimation error For example 119909stands for the estimate of variable 119909 and 119909 = 119909 minus 119909 stands forthe estimate error of variable 119909
2 Problem Formulation and Preliminaries
In this section the nonlinear model having one-step ran-domly delayed observations and the filtering algorithmderived from this model are reviewed
21 Nonlinear System Model Consider a nonlinear discrete-time stochastic system as state model shown by
119909119896+1
= 119891119896(119909119896) + 119908119896 119896 ge 0 (1)
and themodel of one sampling randomly delayed observation
119911119896= ℎ119896(119909119896) + V119896 119896 ge 1 (2)
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (3)
where 119909119896 119896 ge 0 is the 119899 times 1 state vector 119911
119896 119896 ge 1 is the
119898 times 1 real measurement 119910119896 119896 gt 1 is the 119898 times 1 available
measurements 119908119896 119896 ge 0 and V
119896 119896 ge 1 are sequences of
uncorrelated Gaussian white noises that have zeromeans andthe covariance matrices which are 119864[119908
119896119908119879
119897] = 119876
119896120575119896119897and
119864[V119896
V119879119897] = 119877
119896120575119896119897 respectively where 120575
119896119897is the Kronecker
delta function the initial state 1199090is a randomGaussian vector
having mean 119864[1199090] = 119909
0|0and covariance 119864[119909
0119909119879
0] = 1198750|0
for all 119896 the nonlinear functions 119891119896and ℎ
119896are infinitely
continuously differentiable and 120574119896 119896 gt 1 denotes a
sequence of uncorrelated Bernoulli randomvariables that cantake the values 0 or 1 with
119901 (120574119896= 1) = 119864 [120574
119896] = 119901119896
119901 (120574119896= 0) = 1 minus 119864 [120574
119896] = 1 minus 119901
119896
119864 [(120574119896minus 119901119896)2
] = (1 minus 119901119896) 119901119896
119864 [(120574119896minus 119901119896)] = 0
(4)
where119901119896represents the probability of a delay inmeasurement
at time 119896Substituting (2) into (3) gives
119910119896+1
= (1 minus 120574119896) [ℎ119896+1(119909119896+1) + V119896+1]
+ 120574119896+1[ℎ119896(119909119896) + V119896]
(5)
In (1)ndash(3) assume that 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 are mutually independentObviously the Bernoulli variable in (3) imitates the
random delay in the following sense at each time 119896 gt 1 if120574119896= 1 then 119910
119896= 119911119896minus1
which means that the measurementis one sampling time randomly delayed otherwise if 120574
119896= 0
then 119910119896= 119911119896which means that the measurement is updated
22 Extended Kalman Filter with One-Step Randomly DelayedObservations In [15] a general and common framework ofGaussian approximation (GA) applied in the system shownby (1)ndash(3) has been presented under these circumstances themeasurements with one sampling time random delay oftenoccur Here the functions of one-step posterior predictiveprobability density 119901(119909
119896+1| 119884119896) and 119901(119910
119896+1| 119884119896) are all
assumed to be Gaussian where 119884119896= 119910119894119896
119894=1is the set of
the available measurements in (3) In (5) it is clear that theGaussian approximation of 119901(119909
119896+1| 119884119896+1) and 119901(V
119896+1| 119884119896+1)
needs to be known when deriving a GA filter for the system
Mathematical Problems in Engineering 3
in (1)ndash(3)Therefore the augmented state vector is defined asfollows
119909119886
119896+1= (
119909119896+1
V119896+1
) (6)
whosemean and covariance are conditioned by119884119896+1
approx-imated by
119909119886
119896+1|119896+1= (
119909119896+1|119896+1
V119896+1|119896+1
)
119875119886
119896+1|119896+1= (
119875119896+1|119896+1
119875119909V119896+1|119896+1
(119875119909V119896+1|119896+1
)119879
119875VV119896+1|119896+1
)
(7)
Note that V119896+1
is independent of 119884119896and 119909
119896+1|119896 Hence the
augmented state prediction 119909119886119896+1|119896
and the covariance 119875119886119896+1|119896
are
119909119886
119896+1|119896= (
119909119896+1|119896
0119898times1
)
119875119886
119896+1|119896= (
119875119896+1|119896
0119899times119898
0119898times119899
119877119896+1
)
(8)
In [15] the equations describing theGaussian approxima-tion (GA) filter applied in the system shown by (1)ndash(3) are asfollows
119909119896+1|119896+1
= 119909119896+1|119896
+ 119870119909
119896+1119910119896+1|119896
(9)
V119896+1|119896+1
= 119870V119896+1119910119896+1|119896
(10)
119875119896+1|119896+1
= 119875119896+1|119896
minus 119870119909
119896+1119875119910119910
119896+1|119896(119870119909
119896+1)119879
(11)
119875119909V119896+1|119896+1
= minus119870119909
119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(12)
119875VV119896+1|119896+1
= 119877119896+1
minus 119870V119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(13)
119870119909
119896+1= 119875119909119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(14)
119910119896+1|119896
= (1 minus 120574119896+1) (119911119896+1
minus 119896+1|119896
) + 120574119896+1(119911119896minus 119896|119896)
+ (120574119896+1
minus 119901119896+1) (119896|119896minus 119896+1|119896
)
(15)
119870V119896+1
= 119875V119910119896+1|119896
(119875119910119910
119896+1|119896)minus1
(16)
119875119910119910
119896+1|119896
= (1 minus 119901119896+1) 119875119911119911
119896+1|119896+ 119901119896+1119875119911119911
119896|119896
+ (1 minus 119901119896+1) 119901119896+1(119896+1|119896
minus 119896|119896) (119896+1|119896
minus 119896|119896)119879
(17)
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119909119911
119896+1|119896+ 119901119896+1119875119909119911
119896+1119896|119896 (18)
119875V119910119896+1|119896
= (1 minus 119901119896+1) 119877119896+1 (19)
where 119875119909V119896+1|119896+1
= 119864[119909119896+1|119896+1
V119879119896+1|119896+1
| 119884119896+1] 119875119909119910119896+1|119896
=
119864[119909119896+1|119896
119910119879
119896+1|119896| 119884119896] 119875119909119911119896+1|119896
= 119864[119909119896+1|119896
119879
119896+1|119896| 119884119896] 119875119909119911119896+1119896|119896
=
119864[119909119896+1|119896
119879
119896|119896| 119884119896] 119875V119910119896+1|119896
= 119864[V119896+1119910119879
119896+1|119896| 119884119896] 119875119911119911119896+1|119896
=
119864[119896+1|119896
119879
119896+1|119896| 119884119896] 119875119911119911119896|119896= 119864[
119896|119896119879
119896|119896| 119884119896] 119896+1|119896
= 119864[119911119896+1
|
119884119896] 119896|119896
= 119864[119911119896| 119884119896] and 119870119909
119896+1and 119870V
119896+1 respectively
express the gain matrices of the filtering estimated state andmeasurement noise Based on (9)ndash(19) the extended Kalmanfilter in [12] can be described by the following equations
Assuming that the 119909119886119896|119896
and 119875119886
119896|119896at time 119896 have been
computed by linearization of 119891119896(119909119896) and ℎ
119896(119909119896)with the first
term of the Taylor series expansion about 119909119896|119896= 119909119896|119896 we get
119909119896+1
asymp 119891119896(119909119896|119896) + 119865119896(119909119896minus 119909119896|119896) + 119908119896 (20)
119911119896asymp ℎ119896(119909119896|119896) + 119867119896(119909119896minus 119909119896|119896) + V119896 (21)
where 119865119896= 120597119891119896(119909119896)120597119909119896|119909119896=119909119896|119896
and119867119896= 120597ℎ119896(119909119896)120597119909119896|119909119896=119909119896|119896
Then119909
119896+1|119896and119875119896+1|119896
are approximated by the linearKalmanfilter
119909119896+1|119896
= 119891119896(119909119896|119896) (22)
119875119896+1|119896
= 119865119896119875119896|119896119865119879
119896+ 119876119896 (23)
Moreover given 119909119896+1|119896
and 119875119896+1|119896
by (22) and (23) bylinearization of ℎ
119896+1(119909119896+1) with the first term of the Taylor
series expansion about 119909119896+1|119896
= 119909119896+1|119896
we get
119911119896+1
asymp ℎ119896+1(119909119896+1|119896
) + 119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1 (24)
where119867119896+1
= 120597ℎ119896+1(119909119896+1)120597119909119896+1|119909119896+1=119909119896+1|119896
Then 119896+1|119896
119896|119896
119875119911119911
119896+1|119896 119875119911119911119896|119896 119875119909119911119896+1|119896
and 119875119909119911119896+1119896|119896
are computed by the linearKalman filter as follows
119896+1|119896
= ℎ119896+1(119909119896+1|119896
) (25)
119896|119896= ℎ119896(119909119896|119896) + V119896|119896 (26)
119875119911119911
119896+1|119896= 119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1 (27)
119875119911119911
119896|119896= 119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896 (28)
119875119909119911
119896+1|119896= 119875119896+1|119896
119867119879
119896+1 (29)
119875119909119911
119896+1119896|119896= 119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (30)
At time 119896 + 1 combining (22)-(23) and (25)ndash(30) with (9)ndash(19) computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7) For the derivation
process of (20) (21) (24) and (26) see the literature [12]
3 Extended Orthogonality Principle
As is known to all model mismatch due to model sim-plification noise characteristics uncertainty initial condi-tions uncertainty or system parametric variation causes therobustness of EKF to be bad and even diverging [16 17]
4 Mathematical Problems in Engineering
Under the orthogonality principle the literature [18] first pre-sented the strong tracking filter (STF) applied in nonlinearsystems with white noiseThe excellent characteristics of STFare described as follows
(1) It has strong robustness when the model is uncertain
(2) For the state changing suddenly or slowly and eventhe system reaching a steady state or not it hasexcellent ability of tracking to the states
(3) It has moderate computational complexity
Further we hold opinion that STF fit copingwith the problemof model uncertainties and other unpredictable disturbancesin nonlinear state estimation that have one-step randomlydelayed observations
The standard STF cannot be directly applied to the stateestimation with one-step randomly delayed observationsbecause of the arbitrarily selected pairs of residuals inorthogonality principle of standard STF which is calculatedaccording to all observations having been updatedThereforein the following section STFRDM is proposed according tothe principle of extended orthogonality applied in fusion one-step randomly delayed observations efficiently
Definition 1 (extended orthogonality principle) For thediscrete-time nonlinear process having one-step randomlydelayed observations in (1)ndash(3) (9) (10) and (22) the suf-ficient condition of the augmented state estimator is called astrong tracking filter that the criteria must satisfy (throughchoosing time varying gain matrices119870119909
119896+1and119870V
119896+1online)
119864 (119909119886
119896+1minus 119909119886
119896+1|119896+1) (119909119886
119896+1minus 119909119886
119896+1|119896+1)119879
= min (31)
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 0
119896 = 0 1 2 119895 = 1 2
(32)
where the criteria of minimum mean square error (MMSE)is shown as (31) the condition of orthogonality is shown as(32) in which the condition is that all of the residuals shouldbe mutually orthogonal at any time
Remark 2 Equation (31) is just the criterion of the existingEKF the derivation of which for the problem is presented inthe Appendix Equation (32) is the core formulation of exten-ded orthogonality principle using other criteria to replace(31) the deformation of extended orthogonality principle canbe obtained Therefore once (32) was introduced into theoriginal filter it has the characteristics of STF
4 Derivation of the STFRDM
In this section an STFRDM algorithm is derived accordingto the principle of extended orthogonality It is easy to findthat the idea of the EKF with one-step randomly delayedobservations depends upon the past measurement data and
the heavy reliance may lead to diverge state estimation Inorder to restrain the divergence the filter should be capableof eliminating the effect of past data from a current state esti-mate if these data are no longermeaningfulThe literature [18]presented a method to modify the covariance of state error attime 119896 through introducing the fading factor of suboptimalas follows
119875119896|119896= 120582119896+1119875119896|119896 (33)
Then the covariance of predicted state error is also modifiedthrough substituting (33) into (23) as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (34)
where 120582119896+1
ge 1 As a consequence the influence of thelatest measurement data in state estimation is dominant anddivergence is restrained
The purpose of the STFRDM is to impair the influenceof the historical data when they are no longer significant byusing a time varying suboptimal fading factor andmodify thegainmatrices online so that the filter has strong tracking abil-ityTherefore a key problem in STFRDM is how to calculatethe suboptimal fading factor 120582
119896+1according to the principle
of extended orthogonalitySubstituting (21) and (24)ndash(26) into (15) yields
119910119896+1|119896
= (1 minus 120574119896+1) [119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1]
+ 120574119896+1[119867119896(119909119896minus 119909119896|119896) + V119896minus V119896|119896]
+ (120574119896+1
minus 119901119896+1) [ℎ119896(119909119896|119896) minus ℎ119896+1(119909119896+1|119896
) + V119896|119896]
(35)
Using (20) minus (22) yields
119909119896+1
minus 119909119896+1|119896
= 119865119896(119909119896minus 119909119896|119896) + 119908119896 (36)
Substituting (22) and (36) into (35) yields
119910119896+1|119896
= [(1 minus 120574119896+1)119867119896+1119865119896+ 120574119896+1119867119896] (119909119896minus 119909119896|119896)
+ (1 minus 120574119896+1)119867119896+1119908119896+ (1 minus 120574
119896+1) V119896+1
+ 120574119896+1(V119896minus V119896|119896) + (120574119896+1
minus 119901119896+1)
sdot [ℎ119896(119909119896|119896) minus ℎ119896+1(119891119896(119909119896|119896)) + V
119896|119896]
(37)
Using a similar derivation method yields
119910119896+1+119895|119896+119895
= [(1 minus 120574119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895]
sdot (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
Mathematical Problems in Engineering 5
sdot 119867119896+1+119895
119908119896+119895(1 minus 120574
119896+1+119895) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
)
sdot [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]
(38)Substituting (38) into (32) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 119864 [[(1 minus 120574
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895] (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
sdot 119867119896+1+119895
119908119896+119895
+ (1 minus 120574119896+1+119895
) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
) [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]] 119910119879
119896+1|119896
(39)
Since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 that can generate the state and observations are mutually
independent and taking (4) into account then the (39) can besimplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896
= [(1 minus 119901119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
sdot 119864 (119909119896+119895
minus 119909119896+119895|119896+119895
) 119910119879
119896+1|119896
(40)
Based on (9) (20) and (22) and by a similar derivationmethod applied in (38) this yields
119909119896+119895
minus 119909119896+119895|119896+119895
= 119909119896+119895
minus 119909119896+119895|119896+119895minus1
minus 119870119909
119896+119895119910119896+119895|119896+119895minus1
= [119868 minus (1 minus 120574119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
(119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
) + (120574119896+119895
minus 119901119896+119895)
sdot [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)
minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]
(41)
Substituting (41) into (40) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] 119864 [[119868 minus (1 minus 120574
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
sdot (119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
)
+ (120574119896+119895
minus 119901119896+119895) [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
) minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]] 119910119879
119896+1|119896
(42)
Again since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and
120574119896 119896 gt 1 that can generate the state and observations are
mutually independent and taking (4) into account then (42)can be simplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] [119868 minus (1 minus 119901
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895119901119896+119895119867119896+119895minus1
sdot 119864 [119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
] 119910119879
119896+1|119896
(43)
From (40) and (43) the following form can be obtained byusing an iterative operation
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
(44)
Equation (9) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
minus 119870119909
119896+1119910119896+1|119896
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
] 119910119879
119896+1|119896
minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119864 119909119896+1|119896
119910119879
119896+1|119896 minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119875119909119910
119896+1|119896minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
(45)
Substituting (29) and (30) into (18) yields
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)
(46)
6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
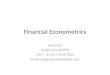
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
on the residual sequenceThis method is named as the strongtracking filter (STF) which was proposed by Zhou and Frank[8ndash11]
In general all the above filtering estimations often con-sider the fact that in real time themeasurements generated bysystem are available but the measurements directly obtainedare affected by random delay in many actual applicationsTherefore the problem of filtering having randomly delayedmeasurements has been attracting wide attention [12ndash15] innonlinear state estimation In [12] two modified filteringalgorithms EKF and UKF with one sampling time randomlydelayed measurements have been proposed an improvedunscented filtering algorithm in [13] was proposed based ontwo-step randomly delayed measurements the literature [14]considered one-stage prediction filtering and fixed-pointsmoothing problems in nonlinear discrete-time stochasticsystems having one-step randomly delayedmeasurements inthis situation the recursive estimation algorithm that is thesignal produced by state-space model is uncertain and onlythe covariance information can be utilized has been pro-posed recently considering observations of one-step ran-domly delayed measurements a generic framework of Gaus-sian approximation (GA) filter has been given in [15]
To overcome the common disadvantages of filteringmethod having one-step randomly delayed measurementsand normal filtering method here a novel STFRDM is pro-posed an extended orthogonality principle is presented as acriterion of designing the STFRDM and through the resid-uals between available and predicted measurements theformula of fading factor is obtained Since the STFRDM canimplement the online tuning of the fading factor by monitor-ing the covariance of residuals the gain of the STFRDMwillbe adjusted in real time to enhance performance of ESFT
The structure of this paper is as follows The basis of the-ory and elementary knowledge about the existing EKF havingone-step randomly delayed measurements is reviewed inSection 2 Then the extended orthogonality principle whichis the basis of STFRDM is proposed in Section 3 There-after in Section 4 the STFRDM having one-step randomlydelayed measurements is derived In Section 5 simulationexperiment on tracking a maneuvering aircraft is imple-mented to compare the performance of the STFRDM withexisting EKF Finally Section 6 gives some conclusions
Throughout this paper 119864[sdot] stands for mathematicalexpectation 119868 stands for the unit matrix diagsdot sdot sdot denotesa block-diagonal matrix the superscripts minus1 119879 and and simrespectively denote the inverse matrix the matrix transpo-sition the estimate and the estimation error For example 119909stands for the estimate of variable 119909 and 119909 = 119909 minus 119909 stands forthe estimate error of variable 119909
2 Problem Formulation and Preliminaries
In this section the nonlinear model having one-step ran-domly delayed observations and the filtering algorithmderived from this model are reviewed
21 Nonlinear System Model Consider a nonlinear discrete-time stochastic system as state model shown by
119909119896+1
= 119891119896(119909119896) + 119908119896 119896 ge 0 (1)
and themodel of one sampling randomly delayed observation
119911119896= ℎ119896(119909119896) + V119896 119896 ge 1 (2)
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (3)
where 119909119896 119896 ge 0 is the 119899 times 1 state vector 119911
119896 119896 ge 1 is the
119898 times 1 real measurement 119910119896 119896 gt 1 is the 119898 times 1 available
measurements 119908119896 119896 ge 0 and V
119896 119896 ge 1 are sequences of
uncorrelated Gaussian white noises that have zeromeans andthe covariance matrices which are 119864[119908
119896119908119879
119897] = 119876
119896120575119896119897and
119864[V119896
V119879119897] = 119877
119896120575119896119897 respectively where 120575
119896119897is the Kronecker
delta function the initial state 1199090is a randomGaussian vector
having mean 119864[1199090] = 119909
0|0and covariance 119864[119909
0119909119879
0] = 1198750|0
for all 119896 the nonlinear functions 119891119896and ℎ
119896are infinitely
continuously differentiable and 120574119896 119896 gt 1 denotes a
sequence of uncorrelated Bernoulli randomvariables that cantake the values 0 or 1 with
119901 (120574119896= 1) = 119864 [120574
119896] = 119901119896
119901 (120574119896= 0) = 1 minus 119864 [120574
119896] = 1 minus 119901
119896
119864 [(120574119896minus 119901119896)2
] = (1 minus 119901119896) 119901119896
119864 [(120574119896minus 119901119896)] = 0
(4)
where119901119896represents the probability of a delay inmeasurement
at time 119896Substituting (2) into (3) gives
119910119896+1
= (1 minus 120574119896) [ℎ119896+1(119909119896+1) + V119896+1]
+ 120574119896+1[ℎ119896(119909119896) + V119896]
(5)
In (1)ndash(3) assume that 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 are mutually independentObviously the Bernoulli variable in (3) imitates the
random delay in the following sense at each time 119896 gt 1 if120574119896= 1 then 119910
119896= 119911119896minus1
which means that the measurementis one sampling time randomly delayed otherwise if 120574
119896= 0
then 119910119896= 119911119896which means that the measurement is updated
22 Extended Kalman Filter with One-Step Randomly DelayedObservations In [15] a general and common framework ofGaussian approximation (GA) applied in the system shownby (1)ndash(3) has been presented under these circumstances themeasurements with one sampling time random delay oftenoccur Here the functions of one-step posterior predictiveprobability density 119901(119909
119896+1| 119884119896) and 119901(119910
119896+1| 119884119896) are all
assumed to be Gaussian where 119884119896= 119910119894119896
119894=1is the set of
the available measurements in (3) In (5) it is clear that theGaussian approximation of 119901(119909
119896+1| 119884119896+1) and 119901(V
119896+1| 119884119896+1)
needs to be known when deriving a GA filter for the system
Mathematical Problems in Engineering 3
in (1)ndash(3)Therefore the augmented state vector is defined asfollows
119909119886
119896+1= (
119909119896+1
V119896+1
) (6)
whosemean and covariance are conditioned by119884119896+1
approx-imated by
119909119886
119896+1|119896+1= (
119909119896+1|119896+1
V119896+1|119896+1
)
119875119886
119896+1|119896+1= (
119875119896+1|119896+1
119875119909V119896+1|119896+1
(119875119909V119896+1|119896+1
)119879
119875VV119896+1|119896+1
)
(7)
Note that V119896+1
is independent of 119884119896and 119909
119896+1|119896 Hence the
augmented state prediction 119909119886119896+1|119896
and the covariance 119875119886119896+1|119896
are
119909119886
119896+1|119896= (
119909119896+1|119896
0119898times1
)
119875119886
119896+1|119896= (
119875119896+1|119896
0119899times119898
0119898times119899
119877119896+1
)
(8)
In [15] the equations describing theGaussian approxima-tion (GA) filter applied in the system shown by (1)ndash(3) are asfollows
119909119896+1|119896+1
= 119909119896+1|119896
+ 119870119909
119896+1119910119896+1|119896
(9)
V119896+1|119896+1
= 119870V119896+1119910119896+1|119896
(10)
119875119896+1|119896+1
= 119875119896+1|119896
minus 119870119909
119896+1119875119910119910
119896+1|119896(119870119909
119896+1)119879
(11)
119875119909V119896+1|119896+1
= minus119870119909
119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(12)
119875VV119896+1|119896+1
= 119877119896+1
minus 119870V119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(13)
119870119909
119896+1= 119875119909119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(14)
119910119896+1|119896
= (1 minus 120574119896+1) (119911119896+1
minus 119896+1|119896
) + 120574119896+1(119911119896minus 119896|119896)
+ (120574119896+1
minus 119901119896+1) (119896|119896minus 119896+1|119896
)
(15)
119870V119896+1
= 119875V119910119896+1|119896
(119875119910119910
119896+1|119896)minus1
(16)
119875119910119910
119896+1|119896
= (1 minus 119901119896+1) 119875119911119911
119896+1|119896+ 119901119896+1119875119911119911
119896|119896
+ (1 minus 119901119896+1) 119901119896+1(119896+1|119896
minus 119896|119896) (119896+1|119896
minus 119896|119896)119879
(17)
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119909119911
119896+1|119896+ 119901119896+1119875119909119911
119896+1119896|119896 (18)
119875V119910119896+1|119896
= (1 minus 119901119896+1) 119877119896+1 (19)
where 119875119909V119896+1|119896+1
= 119864[119909119896+1|119896+1
V119879119896+1|119896+1
| 119884119896+1] 119875119909119910119896+1|119896
=
119864[119909119896+1|119896
119910119879
119896+1|119896| 119884119896] 119875119909119911119896+1|119896
= 119864[119909119896+1|119896
119879
119896+1|119896| 119884119896] 119875119909119911119896+1119896|119896
=
119864[119909119896+1|119896
119879
119896|119896| 119884119896] 119875V119910119896+1|119896
= 119864[V119896+1119910119879
119896+1|119896| 119884119896] 119875119911119911119896+1|119896
=
119864[119896+1|119896
119879
119896+1|119896| 119884119896] 119875119911119911119896|119896= 119864[
119896|119896119879
119896|119896| 119884119896] 119896+1|119896
= 119864[119911119896+1
|
119884119896] 119896|119896
= 119864[119911119896| 119884119896] and 119870119909
119896+1and 119870V
119896+1 respectively
express the gain matrices of the filtering estimated state andmeasurement noise Based on (9)ndash(19) the extended Kalmanfilter in [12] can be described by the following equations
Assuming that the 119909119886119896|119896
and 119875119886
119896|119896at time 119896 have been
computed by linearization of 119891119896(119909119896) and ℎ
119896(119909119896)with the first
term of the Taylor series expansion about 119909119896|119896= 119909119896|119896 we get
119909119896+1
asymp 119891119896(119909119896|119896) + 119865119896(119909119896minus 119909119896|119896) + 119908119896 (20)
119911119896asymp ℎ119896(119909119896|119896) + 119867119896(119909119896minus 119909119896|119896) + V119896 (21)
where 119865119896= 120597119891119896(119909119896)120597119909119896|119909119896=119909119896|119896
and119867119896= 120597ℎ119896(119909119896)120597119909119896|119909119896=119909119896|119896
Then119909
119896+1|119896and119875119896+1|119896
are approximated by the linearKalmanfilter
119909119896+1|119896
= 119891119896(119909119896|119896) (22)
119875119896+1|119896
= 119865119896119875119896|119896119865119879
119896+ 119876119896 (23)
Moreover given 119909119896+1|119896
and 119875119896+1|119896
by (22) and (23) bylinearization of ℎ
119896+1(119909119896+1) with the first term of the Taylor
series expansion about 119909119896+1|119896
= 119909119896+1|119896
we get
119911119896+1
asymp ℎ119896+1(119909119896+1|119896
) + 119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1 (24)
where119867119896+1
= 120597ℎ119896+1(119909119896+1)120597119909119896+1|119909119896+1=119909119896+1|119896
Then 119896+1|119896
119896|119896
119875119911119911
119896+1|119896 119875119911119911119896|119896 119875119909119911119896+1|119896
and 119875119909119911119896+1119896|119896
are computed by the linearKalman filter as follows
119896+1|119896
= ℎ119896+1(119909119896+1|119896
) (25)
119896|119896= ℎ119896(119909119896|119896) + V119896|119896 (26)
119875119911119911
119896+1|119896= 119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1 (27)
119875119911119911
119896|119896= 119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896 (28)
119875119909119911
119896+1|119896= 119875119896+1|119896
119867119879
119896+1 (29)
119875119909119911
119896+1119896|119896= 119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (30)
At time 119896 + 1 combining (22)-(23) and (25)ndash(30) with (9)ndash(19) computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7) For the derivation
process of (20) (21) (24) and (26) see the literature [12]
3 Extended Orthogonality Principle
As is known to all model mismatch due to model sim-plification noise characteristics uncertainty initial condi-tions uncertainty or system parametric variation causes therobustness of EKF to be bad and even diverging [16 17]
4 Mathematical Problems in Engineering
Under the orthogonality principle the literature [18] first pre-sented the strong tracking filter (STF) applied in nonlinearsystems with white noiseThe excellent characteristics of STFare described as follows
(1) It has strong robustness when the model is uncertain
(2) For the state changing suddenly or slowly and eventhe system reaching a steady state or not it hasexcellent ability of tracking to the states
(3) It has moderate computational complexity
Further we hold opinion that STF fit copingwith the problemof model uncertainties and other unpredictable disturbancesin nonlinear state estimation that have one-step randomlydelayed observations
The standard STF cannot be directly applied to the stateestimation with one-step randomly delayed observationsbecause of the arbitrarily selected pairs of residuals inorthogonality principle of standard STF which is calculatedaccording to all observations having been updatedThereforein the following section STFRDM is proposed according tothe principle of extended orthogonality applied in fusion one-step randomly delayed observations efficiently
Definition 1 (extended orthogonality principle) For thediscrete-time nonlinear process having one-step randomlydelayed observations in (1)ndash(3) (9) (10) and (22) the suf-ficient condition of the augmented state estimator is called astrong tracking filter that the criteria must satisfy (throughchoosing time varying gain matrices119870119909
119896+1and119870V
119896+1online)
119864 (119909119886
119896+1minus 119909119886
119896+1|119896+1) (119909119886
119896+1minus 119909119886
119896+1|119896+1)119879
= min (31)
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 0
119896 = 0 1 2 119895 = 1 2
(32)
where the criteria of minimum mean square error (MMSE)is shown as (31) the condition of orthogonality is shown as(32) in which the condition is that all of the residuals shouldbe mutually orthogonal at any time
Remark 2 Equation (31) is just the criterion of the existingEKF the derivation of which for the problem is presented inthe Appendix Equation (32) is the core formulation of exten-ded orthogonality principle using other criteria to replace(31) the deformation of extended orthogonality principle canbe obtained Therefore once (32) was introduced into theoriginal filter it has the characteristics of STF
4 Derivation of the STFRDM
In this section an STFRDM algorithm is derived accordingto the principle of extended orthogonality It is easy to findthat the idea of the EKF with one-step randomly delayedobservations depends upon the past measurement data and
the heavy reliance may lead to diverge state estimation Inorder to restrain the divergence the filter should be capableof eliminating the effect of past data from a current state esti-mate if these data are no longermeaningfulThe literature [18]presented a method to modify the covariance of state error attime 119896 through introducing the fading factor of suboptimalas follows
119875119896|119896= 120582119896+1119875119896|119896 (33)
Then the covariance of predicted state error is also modifiedthrough substituting (33) into (23) as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (34)
where 120582119896+1
ge 1 As a consequence the influence of thelatest measurement data in state estimation is dominant anddivergence is restrained
The purpose of the STFRDM is to impair the influenceof the historical data when they are no longer significant byusing a time varying suboptimal fading factor andmodify thegainmatrices online so that the filter has strong tracking abil-ityTherefore a key problem in STFRDM is how to calculatethe suboptimal fading factor 120582
119896+1according to the principle
of extended orthogonalitySubstituting (21) and (24)ndash(26) into (15) yields
119910119896+1|119896
= (1 minus 120574119896+1) [119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1]
+ 120574119896+1[119867119896(119909119896minus 119909119896|119896) + V119896minus V119896|119896]
+ (120574119896+1
minus 119901119896+1) [ℎ119896(119909119896|119896) minus ℎ119896+1(119909119896+1|119896
) + V119896|119896]
(35)
Using (20) minus (22) yields
119909119896+1
minus 119909119896+1|119896
= 119865119896(119909119896minus 119909119896|119896) + 119908119896 (36)
Substituting (22) and (36) into (35) yields
119910119896+1|119896
= [(1 minus 120574119896+1)119867119896+1119865119896+ 120574119896+1119867119896] (119909119896minus 119909119896|119896)
+ (1 minus 120574119896+1)119867119896+1119908119896+ (1 minus 120574
119896+1) V119896+1
+ 120574119896+1(V119896minus V119896|119896) + (120574119896+1
minus 119901119896+1)
sdot [ℎ119896(119909119896|119896) minus ℎ119896+1(119891119896(119909119896|119896)) + V
119896|119896]
(37)
Using a similar derivation method yields
119910119896+1+119895|119896+119895
= [(1 minus 120574119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895]
sdot (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
Mathematical Problems in Engineering 5
sdot 119867119896+1+119895
119908119896+119895(1 minus 120574
119896+1+119895) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
)
sdot [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]
(38)Substituting (38) into (32) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 119864 [[(1 minus 120574
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895] (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
sdot 119867119896+1+119895
119908119896+119895
+ (1 minus 120574119896+1+119895
) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
) [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]] 119910119879
119896+1|119896
(39)
Since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 that can generate the state and observations are mutually
independent and taking (4) into account then the (39) can besimplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896
= [(1 minus 119901119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
sdot 119864 (119909119896+119895
minus 119909119896+119895|119896+119895
) 119910119879
119896+1|119896
(40)
Based on (9) (20) and (22) and by a similar derivationmethod applied in (38) this yields
119909119896+119895
minus 119909119896+119895|119896+119895
= 119909119896+119895
minus 119909119896+119895|119896+119895minus1
minus 119870119909
119896+119895119910119896+119895|119896+119895minus1
= [119868 minus (1 minus 120574119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
(119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
) + (120574119896+119895
minus 119901119896+119895)
sdot [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)
minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]
(41)
Substituting (41) into (40) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] 119864 [[119868 minus (1 minus 120574
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
sdot (119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
)
+ (120574119896+119895
minus 119901119896+119895) [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
) minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]] 119910119879
119896+1|119896
(42)
Again since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and
120574119896 119896 gt 1 that can generate the state and observations are
mutually independent and taking (4) into account then (42)can be simplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] [119868 minus (1 minus 119901
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895119901119896+119895119867119896+119895minus1
sdot 119864 [119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
] 119910119879
119896+1|119896
(43)
From (40) and (43) the following form can be obtained byusing an iterative operation
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
(44)
Equation (9) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
minus 119870119909
119896+1119910119896+1|119896
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
] 119910119879
119896+1|119896
minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119864 119909119896+1|119896
119910119879
119896+1|119896 minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119875119909119910
119896+1|119896minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
(45)
Substituting (29) and (30) into (18) yields
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)
(46)
6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
in (1)ndash(3)Therefore the augmented state vector is defined asfollows
119909119886
119896+1= (
119909119896+1
V119896+1
) (6)
whosemean and covariance are conditioned by119884119896+1
approx-imated by
119909119886
119896+1|119896+1= (
119909119896+1|119896+1
V119896+1|119896+1
)
119875119886
119896+1|119896+1= (
119875119896+1|119896+1
119875119909V119896+1|119896+1
(119875119909V119896+1|119896+1
)119879
119875VV119896+1|119896+1
)
(7)
Note that V119896+1
is independent of 119884119896and 119909
119896+1|119896 Hence the
augmented state prediction 119909119886119896+1|119896
and the covariance 119875119886119896+1|119896
are
119909119886
119896+1|119896= (
119909119896+1|119896
0119898times1
)
119875119886
119896+1|119896= (
119875119896+1|119896
0119899times119898
0119898times119899
119877119896+1
)
(8)
In [15] the equations describing theGaussian approxima-tion (GA) filter applied in the system shown by (1)ndash(3) are asfollows
119909119896+1|119896+1
= 119909119896+1|119896
+ 119870119909
119896+1119910119896+1|119896
(9)
V119896+1|119896+1
= 119870V119896+1119910119896+1|119896
(10)
119875119896+1|119896+1
= 119875119896+1|119896
minus 119870119909
119896+1119875119910119910
119896+1|119896(119870119909
119896+1)119879
(11)
119875119909V119896+1|119896+1
= minus119870119909
119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(12)
119875VV119896+1|119896+1
= 119877119896+1
minus 119870V119896+1119875119910119910
119896+1|119896(119870
V119896+1)119879
(13)
119870119909
119896+1= 119875119909119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(14)
119910119896+1|119896
= (1 minus 120574119896+1) (119911119896+1
minus 119896+1|119896
) + 120574119896+1(119911119896minus 119896|119896)
+ (120574119896+1
minus 119901119896+1) (119896|119896minus 119896+1|119896
)
(15)
119870V119896+1
= 119875V119910119896+1|119896
(119875119910119910
119896+1|119896)minus1
(16)
119875119910119910
119896+1|119896
= (1 minus 119901119896+1) 119875119911119911
119896+1|119896+ 119901119896+1119875119911119911
119896|119896
+ (1 minus 119901119896+1) 119901119896+1(119896+1|119896
minus 119896|119896) (119896+1|119896
minus 119896|119896)119879
(17)
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119909119911
119896+1|119896+ 119901119896+1119875119909119911
119896+1119896|119896 (18)
119875V119910119896+1|119896
= (1 minus 119901119896+1) 119877119896+1 (19)
where 119875119909V119896+1|119896+1
= 119864[119909119896+1|119896+1
V119879119896+1|119896+1
| 119884119896+1] 119875119909119910119896+1|119896
=
119864[119909119896+1|119896
119910119879
119896+1|119896| 119884119896] 119875119909119911119896+1|119896
= 119864[119909119896+1|119896
119879
119896+1|119896| 119884119896] 119875119909119911119896+1119896|119896
=
119864[119909119896+1|119896
119879
119896|119896| 119884119896] 119875V119910119896+1|119896
= 119864[V119896+1119910119879
119896+1|119896| 119884119896] 119875119911119911119896+1|119896
=
119864[119896+1|119896
119879
119896+1|119896| 119884119896] 119875119911119911119896|119896= 119864[
119896|119896119879
119896|119896| 119884119896] 119896+1|119896
= 119864[119911119896+1
|
119884119896] 119896|119896
= 119864[119911119896| 119884119896] and 119870119909
119896+1and 119870V
119896+1 respectively
express the gain matrices of the filtering estimated state andmeasurement noise Based on (9)ndash(19) the extended Kalmanfilter in [12] can be described by the following equations
Assuming that the 119909119886119896|119896
and 119875119886
119896|119896at time 119896 have been
computed by linearization of 119891119896(119909119896) and ℎ
119896(119909119896)with the first
term of the Taylor series expansion about 119909119896|119896= 119909119896|119896 we get
119909119896+1
asymp 119891119896(119909119896|119896) + 119865119896(119909119896minus 119909119896|119896) + 119908119896 (20)
119911119896asymp ℎ119896(119909119896|119896) + 119867119896(119909119896minus 119909119896|119896) + V119896 (21)
where 119865119896= 120597119891119896(119909119896)120597119909119896|119909119896=119909119896|119896
and119867119896= 120597ℎ119896(119909119896)120597119909119896|119909119896=119909119896|119896
Then119909
119896+1|119896and119875119896+1|119896
are approximated by the linearKalmanfilter
119909119896+1|119896
= 119891119896(119909119896|119896) (22)
119875119896+1|119896
= 119865119896119875119896|119896119865119879
119896+ 119876119896 (23)
Moreover given 119909119896+1|119896
and 119875119896+1|119896
by (22) and (23) bylinearization of ℎ
119896+1(119909119896+1) with the first term of the Taylor
series expansion about 119909119896+1|119896
= 119909119896+1|119896
we get
119911119896+1
asymp ℎ119896+1(119909119896+1|119896
) + 119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1 (24)
where119867119896+1
= 120597ℎ119896+1(119909119896+1)120597119909119896+1|119909119896+1=119909119896+1|119896
Then 119896+1|119896
119896|119896
119875119911119911
119896+1|119896 119875119911119911119896|119896 119875119909119911119896+1|119896
and 119875119909119911119896+1119896|119896
are computed by the linearKalman filter as follows
119896+1|119896
= ℎ119896+1(119909119896+1|119896
) (25)
119896|119896= ℎ119896(119909119896|119896) + V119896|119896 (26)
119875119911119911
119896+1|119896= 119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1 (27)
119875119911119911
119896|119896= 119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896 (28)
119875119909119911
119896+1|119896= 119875119896+1|119896
119867119879
119896+1 (29)
119875119909119911
119896+1119896|119896= 119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (30)
At time 119896 + 1 combining (22)-(23) and (25)ndash(30) with (9)ndash(19) computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7) For the derivation
process of (20) (21) (24) and (26) see the literature [12]
3 Extended Orthogonality Principle
As is known to all model mismatch due to model sim-plification noise characteristics uncertainty initial condi-tions uncertainty or system parametric variation causes therobustness of EKF to be bad and even diverging [16 17]
4 Mathematical Problems in Engineering
Under the orthogonality principle the literature [18] first pre-sented the strong tracking filter (STF) applied in nonlinearsystems with white noiseThe excellent characteristics of STFare described as follows
(1) It has strong robustness when the model is uncertain
(2) For the state changing suddenly or slowly and eventhe system reaching a steady state or not it hasexcellent ability of tracking to the states
(3) It has moderate computational complexity
Further we hold opinion that STF fit copingwith the problemof model uncertainties and other unpredictable disturbancesin nonlinear state estimation that have one-step randomlydelayed observations
The standard STF cannot be directly applied to the stateestimation with one-step randomly delayed observationsbecause of the arbitrarily selected pairs of residuals inorthogonality principle of standard STF which is calculatedaccording to all observations having been updatedThereforein the following section STFRDM is proposed according tothe principle of extended orthogonality applied in fusion one-step randomly delayed observations efficiently
Definition 1 (extended orthogonality principle) For thediscrete-time nonlinear process having one-step randomlydelayed observations in (1)ndash(3) (9) (10) and (22) the suf-ficient condition of the augmented state estimator is called astrong tracking filter that the criteria must satisfy (throughchoosing time varying gain matrices119870119909
119896+1and119870V
119896+1online)
119864 (119909119886
119896+1minus 119909119886
119896+1|119896+1) (119909119886
119896+1minus 119909119886
119896+1|119896+1)119879
= min (31)
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 0
119896 = 0 1 2 119895 = 1 2
(32)
where the criteria of minimum mean square error (MMSE)is shown as (31) the condition of orthogonality is shown as(32) in which the condition is that all of the residuals shouldbe mutually orthogonal at any time
Remark 2 Equation (31) is just the criterion of the existingEKF the derivation of which for the problem is presented inthe Appendix Equation (32) is the core formulation of exten-ded orthogonality principle using other criteria to replace(31) the deformation of extended orthogonality principle canbe obtained Therefore once (32) was introduced into theoriginal filter it has the characteristics of STF
4 Derivation of the STFRDM
In this section an STFRDM algorithm is derived accordingto the principle of extended orthogonality It is easy to findthat the idea of the EKF with one-step randomly delayedobservations depends upon the past measurement data and
the heavy reliance may lead to diverge state estimation Inorder to restrain the divergence the filter should be capableof eliminating the effect of past data from a current state esti-mate if these data are no longermeaningfulThe literature [18]presented a method to modify the covariance of state error attime 119896 through introducing the fading factor of suboptimalas follows
119875119896|119896= 120582119896+1119875119896|119896 (33)
Then the covariance of predicted state error is also modifiedthrough substituting (33) into (23) as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (34)
where 120582119896+1
ge 1 As a consequence the influence of thelatest measurement data in state estimation is dominant anddivergence is restrained
The purpose of the STFRDM is to impair the influenceof the historical data when they are no longer significant byusing a time varying suboptimal fading factor andmodify thegainmatrices online so that the filter has strong tracking abil-ityTherefore a key problem in STFRDM is how to calculatethe suboptimal fading factor 120582
119896+1according to the principle
of extended orthogonalitySubstituting (21) and (24)ndash(26) into (15) yields
119910119896+1|119896
= (1 minus 120574119896+1) [119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1]
+ 120574119896+1[119867119896(119909119896minus 119909119896|119896) + V119896minus V119896|119896]
+ (120574119896+1
minus 119901119896+1) [ℎ119896(119909119896|119896) minus ℎ119896+1(119909119896+1|119896
) + V119896|119896]
(35)
Using (20) minus (22) yields
119909119896+1
minus 119909119896+1|119896
= 119865119896(119909119896minus 119909119896|119896) + 119908119896 (36)
Substituting (22) and (36) into (35) yields
119910119896+1|119896
= [(1 minus 120574119896+1)119867119896+1119865119896+ 120574119896+1119867119896] (119909119896minus 119909119896|119896)
+ (1 minus 120574119896+1)119867119896+1119908119896+ (1 minus 120574
119896+1) V119896+1
+ 120574119896+1(V119896minus V119896|119896) + (120574119896+1
minus 119901119896+1)
sdot [ℎ119896(119909119896|119896) minus ℎ119896+1(119891119896(119909119896|119896)) + V
119896|119896]
(37)
Using a similar derivation method yields
119910119896+1+119895|119896+119895
= [(1 minus 120574119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895]
sdot (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
Mathematical Problems in Engineering 5
sdot 119867119896+1+119895
119908119896+119895(1 minus 120574
119896+1+119895) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
)
sdot [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]
(38)Substituting (38) into (32) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 119864 [[(1 minus 120574
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895] (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
sdot 119867119896+1+119895
119908119896+119895
+ (1 minus 120574119896+1+119895
) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
) [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]] 119910119879
119896+1|119896
(39)
Since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 that can generate the state and observations are mutually
independent and taking (4) into account then the (39) can besimplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896
= [(1 minus 119901119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
sdot 119864 (119909119896+119895
minus 119909119896+119895|119896+119895
) 119910119879
119896+1|119896
(40)
Based on (9) (20) and (22) and by a similar derivationmethod applied in (38) this yields
119909119896+119895
minus 119909119896+119895|119896+119895
= 119909119896+119895
minus 119909119896+119895|119896+119895minus1
minus 119870119909
119896+119895119910119896+119895|119896+119895minus1
= [119868 minus (1 minus 120574119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
(119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
) + (120574119896+119895
minus 119901119896+119895)
sdot [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)
minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]
(41)
Substituting (41) into (40) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] 119864 [[119868 minus (1 minus 120574
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
sdot (119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
)
+ (120574119896+119895
minus 119901119896+119895) [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
) minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]] 119910119879
119896+1|119896
(42)
Again since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and
120574119896 119896 gt 1 that can generate the state and observations are
mutually independent and taking (4) into account then (42)can be simplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] [119868 minus (1 minus 119901
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895119901119896+119895119867119896+119895minus1
sdot 119864 [119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
] 119910119879
119896+1|119896
(43)
From (40) and (43) the following form can be obtained byusing an iterative operation
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
(44)
Equation (9) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
minus 119870119909
119896+1119910119896+1|119896
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
] 119910119879
119896+1|119896
minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119864 119909119896+1|119896
119910119879
119896+1|119896 minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119875119909119910
119896+1|119896minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
(45)
Substituting (29) and (30) into (18) yields
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)
(46)
6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Under the orthogonality principle the literature [18] first pre-sented the strong tracking filter (STF) applied in nonlinearsystems with white noiseThe excellent characteristics of STFare described as follows
(1) It has strong robustness when the model is uncertain
(2) For the state changing suddenly or slowly and eventhe system reaching a steady state or not it hasexcellent ability of tracking to the states
(3) It has moderate computational complexity
Further we hold opinion that STF fit copingwith the problemof model uncertainties and other unpredictable disturbancesin nonlinear state estimation that have one-step randomlydelayed observations
The standard STF cannot be directly applied to the stateestimation with one-step randomly delayed observationsbecause of the arbitrarily selected pairs of residuals inorthogonality principle of standard STF which is calculatedaccording to all observations having been updatedThereforein the following section STFRDM is proposed according tothe principle of extended orthogonality applied in fusion one-step randomly delayed observations efficiently
Definition 1 (extended orthogonality principle) For thediscrete-time nonlinear process having one-step randomlydelayed observations in (1)ndash(3) (9) (10) and (22) the suf-ficient condition of the augmented state estimator is called astrong tracking filter that the criteria must satisfy (throughchoosing time varying gain matrices119870119909
119896+1and119870V
119896+1online)
119864 (119909119886
119896+1minus 119909119886
119896+1|119896+1) (119909119886
119896+1minus 119909119886
119896+1|119896+1)119879
= min (31)
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 0
119896 = 0 1 2 119895 = 1 2
(32)
where the criteria of minimum mean square error (MMSE)is shown as (31) the condition of orthogonality is shown as(32) in which the condition is that all of the residuals shouldbe mutually orthogonal at any time
Remark 2 Equation (31) is just the criterion of the existingEKF the derivation of which for the problem is presented inthe Appendix Equation (32) is the core formulation of exten-ded orthogonality principle using other criteria to replace(31) the deformation of extended orthogonality principle canbe obtained Therefore once (32) was introduced into theoriginal filter it has the characteristics of STF
4 Derivation of the STFRDM
In this section an STFRDM algorithm is derived accordingto the principle of extended orthogonality It is easy to findthat the idea of the EKF with one-step randomly delayedobservations depends upon the past measurement data and
the heavy reliance may lead to diverge state estimation Inorder to restrain the divergence the filter should be capableof eliminating the effect of past data from a current state esti-mate if these data are no longermeaningfulThe literature [18]presented a method to modify the covariance of state error attime 119896 through introducing the fading factor of suboptimalas follows
119875119896|119896= 120582119896+1119875119896|119896 (33)
Then the covariance of predicted state error is also modifiedthrough substituting (33) into (23) as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (34)
where 120582119896+1
ge 1 As a consequence the influence of thelatest measurement data in state estimation is dominant anddivergence is restrained
The purpose of the STFRDM is to impair the influenceof the historical data when they are no longer significant byusing a time varying suboptimal fading factor andmodify thegainmatrices online so that the filter has strong tracking abil-ityTherefore a key problem in STFRDM is how to calculatethe suboptimal fading factor 120582
119896+1according to the principle
of extended orthogonalitySubstituting (21) and (24)ndash(26) into (15) yields
119910119896+1|119896
= (1 minus 120574119896+1) [119867119896+1(119909119896+1
minus 119909119896+1|119896
) + V119896+1]
+ 120574119896+1[119867119896(119909119896minus 119909119896|119896) + V119896minus V119896|119896]
+ (120574119896+1
minus 119901119896+1) [ℎ119896(119909119896|119896) minus ℎ119896+1(119909119896+1|119896
) + V119896|119896]
(35)
Using (20) minus (22) yields
119909119896+1
minus 119909119896+1|119896
= 119865119896(119909119896minus 119909119896|119896) + 119908119896 (36)
Substituting (22) and (36) into (35) yields
119910119896+1|119896
= [(1 minus 120574119896+1)119867119896+1119865119896+ 120574119896+1119867119896] (119909119896minus 119909119896|119896)
+ (1 minus 120574119896+1)119867119896+1119908119896+ (1 minus 120574
119896+1) V119896+1
+ 120574119896+1(V119896minus V119896|119896) + (120574119896+1
minus 119901119896+1)
sdot [ℎ119896(119909119896|119896) minus ℎ119896+1(119891119896(119909119896|119896)) + V
119896|119896]
(37)
Using a similar derivation method yields
119910119896+1+119895|119896+119895
= [(1 minus 120574119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895]
sdot (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
Mathematical Problems in Engineering 5
sdot 119867119896+1+119895
119908119896+119895(1 minus 120574
119896+1+119895) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
)
sdot [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]
(38)Substituting (38) into (32) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 119864 [[(1 minus 120574
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895] (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
sdot 119867119896+1+119895
119908119896+119895
+ (1 minus 120574119896+1+119895
) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
) [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]] 119910119879
119896+1|119896
(39)
Since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 that can generate the state and observations are mutually
independent and taking (4) into account then the (39) can besimplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896
= [(1 minus 119901119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
sdot 119864 (119909119896+119895
minus 119909119896+119895|119896+119895
) 119910119879
119896+1|119896
(40)
Based on (9) (20) and (22) and by a similar derivationmethod applied in (38) this yields
119909119896+119895
minus 119909119896+119895|119896+119895
= 119909119896+119895
minus 119909119896+119895|119896+119895minus1
minus 119870119909
119896+119895119910119896+119895|119896+119895minus1
= [119868 minus (1 minus 120574119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
(119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
) + (120574119896+119895
minus 119901119896+119895)
sdot [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)
minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]
(41)
Substituting (41) into (40) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] 119864 [[119868 minus (1 minus 120574
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
sdot (119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
)
+ (120574119896+119895
minus 119901119896+119895) [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
) minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]] 119910119879
119896+1|119896
(42)
Again since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and
120574119896 119896 gt 1 that can generate the state and observations are
mutually independent and taking (4) into account then (42)can be simplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] [119868 minus (1 minus 119901
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895119901119896+119895119867119896+119895minus1
sdot 119864 [119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
] 119910119879
119896+1|119896
(43)
From (40) and (43) the following form can be obtained byusing an iterative operation
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
(44)
Equation (9) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
minus 119870119909
119896+1119910119896+1|119896
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
] 119910119879
119896+1|119896
minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119864 119909119896+1|119896
119910119879
119896+1|119896 minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119875119909119910
119896+1|119896minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
(45)
Substituting (29) and (30) into (18) yields
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)
(46)
6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
sdot 119867119896+1+119895
119908119896+119895(1 minus 120574
119896+1+119895) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
)
sdot [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]
(38)Substituting (38) into (32) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = 119864 [[(1 minus 120574
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 120574119896+1+119895
119867119896+119895] (119909119896+119895
minus 119909119896+119895|119896+119895
) + (1 minus 120574119896+1+119895
)
sdot 119867119896+1+119895
119908119896+119895
+ (1 minus 120574119896+1+119895
) V119896+1+119895
+ 120574119896+1+119895
(V119896+119895
minus V119896+119895|119896+119895
) + (120574119896+1+119895
minus 119901119896+1+119895
) [ℎ119896+119895(119909119896+119895|119896+119895
)
minus ℎ119896+1+119895
(119891119896+119895(119909119896+119895|119896+119895
)) + V119896+119895|119896+119895
]] 119910119879
119896+1|119896
(39)
Since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and 120574
119896 119896 gt
1 that can generate the state and observations are mutually
independent and taking (4) into account then the (39) can besimplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896
= [(1 minus 119901119896+1+119895
)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
sdot 119864 (119909119896+119895
minus 119909119896+119895|119896+119895
) 119910119879
119896+1|119896
(40)
Based on (9) (20) and (22) and by a similar derivationmethod applied in (38) this yields
119909119896+119895
minus 119909119896+119895|119896+119895
= 119909119896+119895
minus 119909119896+119895|119896+119895minus1
minus 119870119909
119896+119895119910119896+119895|119896+119895minus1
= [119868 minus (1 minus 120574119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
(119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
) + (120574119896+119895
minus 119901119896+119895)
sdot [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)
minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]
(41)
Substituting (41) into (40) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] 119864 [[119868 minus (1 minus 120574
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895120574119896+119895119867119896+119895minus1
sdot (119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
) + 119908119896+119895minus1
minus 119870119909
119896+119895(1 minus 120574
119896+119895)119867119896+119895119908119896+119895minus1
+ (1 minus 120574119896+119895) V119896+119895
+ 120574119896+119895(V119896+119895minus1
minus V119896+119895minus1|119896+119895minus1
)
+ (120574119896+119895
minus 119901119896+119895) [ℎ119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
) minus ℎ119896+119895(119891119896+119895minus1
(119909119896+119895minus1|119896+119895minus1
)) + V119896+119895minus1|119896+119895minus1
]] 119910119879
119896+1|119896
(42)
Again since the initial state 1199090 119908119896 119896 ge 0 V
119896 119896 ge 1 and
120574119896 119896 gt 1 that can generate the state and observations are
mutually independent and taking (4) into account then (42)can be simplified to
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895] [119868 minus (1 minus 119901
119896+119895)119870119909
119896+119895119867119896+119895] 119865119896+119895minus1
minus 119870119909
119896+119895119901119896+119895119867119896+119895minus1
sdot 119864 [119909119896+119895minus1
minus 119909119896+119895minus1|119896+119895minus1
] 119910119879
119896+1|119896
(43)
From (40) and (43) the following form can be obtained byusing an iterative operation
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
(44)
Equation (9) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
minus 119870119909
119896+1119910119896+1|119896
] 119910119879
119896+1|119896
= 119864 [119909119896+1
minus 119909119896+1|119896
] 119910119879
119896+1|119896
minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119864 119909119896+1|119896
119910119879
119896+1|119896 minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
= 119875119909119910
119896+1|119896minus 119870119909
119896+1119864 119910119896+1|119896
119910119879
119896+1|119896
(45)
Substituting (29) and (30) into (18) yields
119875119909119910
119896+1|119896= (1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)
(46)
6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Substituting (46) into (45) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896
= (1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896) minus 119870119909
119896+11198810
119896+1
(47)
where1198810119896+1
≜ 119864119910119896+1|119896
119910119879
119896+1|119896 is the covariance of the residual
Substituting (17) (22) (25)ndash(28) and (46) into (14) yields
119870119909
119896+1= [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1(119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896)
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
(48)
Substituting (48) into (47) yields
119864 [119909119896+1
minus 119909119896+1|119896+1
] 119910119879
119896+1|119896 = [(1 minus 119901
119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(49)
Substituting (49) into (44) yields
119864 119910119896+1+119895|119896+119895
119910119879
119896+1|119896 = [(1 minus 119901
119896+1+119895)119867119896+1+119895
119865119896+119895
+ 119901119896+1+119895
119867119896+119895]
119895
prod
119894=2
[119868 minus (1 minus 119901119896+119894)119870119909
119896+119894119867119896+119894] 119865119896+119894minus1
minus 119870119909
119896+119894119901119896+119894119867119896+119894minus1
[(1 minus 119901119896+1) 119875119896+1|119896
119867119879
119896+1
+ 119901119896+1(119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896)] 119868 minus ((1 minus 119901
119896+1)
sdot (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1
(50)
In order to satisfy the principle of extended orthogonality in(32) an appropriate fading factor 120582
119896+1needs to be chosen
according to (50) to ensure that (51) is workable
119868 minus ((1 minus 119901119896+1) (119867119896+1119875119896+1|119896
119867119879
119896+1+ 119877119896+1)
+ 119901119896+1[119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896]
+ (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
)
minus1
1198810
119896+1= 0
(51)
Equation (51) is equivalent to
(1 minus 119901119896+1)119867119896+1119875119896+1|119896
119867119879
119896+1+ 119901119896+1119867119896119875119896|119896119867119879
119896= 1198810
119896+1
minus (1 minus 119901119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
(52)
Substituting (33) and (34) into (52) yields
120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896] = 119881
0
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896))
minus ℎ119896(119909119896|119896) minus V119896|119896] [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896)
minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1
minus 119901119896+1) (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)
(53)
Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
In both sides of (53) the traces are directly calculated simi-larly to the idea of the literature [8] as follows
tr [120582119896+1[(1 minus 119901
119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896]] = tr [1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot (119877119896+1
+ 119867119896+1119876119896119867119879
119896+1)]
(54)
Define
119872119896+1
≜ (1 minus 119901119896+1)119867119896+1119865119896119875119896|119896119865119879
119896119867119879
119896+1
+ 119901119896+1119867119896119875119896|119896119867119879
119896
(55)
119873119896+1
≜ 1198810
119896+1minus (1 minus 119901
119896+1)
sdot 119901119896+1[ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]
sdot [ℎ119896+1(119891119896(119909119896|119896)) minus ℎ
119896(119909119896|119896) minus V119896|119896]119879
minus 119901119896+1[119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896] minus (1 minus 119901
119896+1)
sdot 119877119896+1
minus (1 minus 119901119896+1)119867119896+1119876119896119867119879
119896+1
(56)
Hence (54) is equivalent to
tr [120582119896+1119872119896+1] = tr [119873
119896+1] (57)
So the fading factor 120582119896+1
can be calculated by
120582119896+1
=tr [119873119896+1]
tr [119872119896+1] (58)
In (56) the actual value of the covariance of residual 1198810119896+1
isunknown which can be calculated roughly by
1198810
119896+1=
1199101|0119910119879
1|0 119896 = 0
1205881198810
119896+ 119910119896+1|119896
119910119879
119896+1|119896
1 + 120588 119896 ge 1
(59)
where 0 lt 120588 le 1 is a forgetting factor which can beheuristically selected like that in the literature [18] for detailssee the simulation results in situation I of Section 5 Becausethe fading factor 120582
119896+1takes effect only when 120582
119896+1ge 1 it can
be finally determined as follows
120582119896+1
= max1tr [119873119896+1]
tr [119872119896+1] (60)
The formulae of the STFRDM algorithm are similar tothose of the EKF with one-step randomly delayed observa-tions shown by (22)-(23) and (25)ndash(30) The differences arethat (23) (28) and (30) should be rewritten as follows
119875119896+1|119896
= 120582119896+1119865119896119875119896|119896119865119879
119896+ 119876119896 (61)
119875119911119911
119896|119896= 120582119896+1119867119896119875119896|119896119867119879
119896+ 119867119896119875119909V119896|119896+ (119867119896119875119909V119896|119896)119879
+ 119875VV119896|119896
(62)
119875119909119911
119896+1119896|119896= 120582119896+1119865119896119875119896|119896119867119879
119896+ 119865119896119875119909V119896|119896 (63)
Then the calculating process of the STFRDM algorithm isinserting (22) (61) (25)ndash(27) (62) (29) and (63) into (9)ndash(19) and computes 119909119886
119896+1|119896+1and 119875119886
119896+1|119896+1in (7)
Remark 3 For nonlinear systems having one-step randomlydelayed observations if directly applying the principle of ext-ended orthogonality to them (31) and (32) may be difficult tobe strictly satisfied Under these circumstances the approxi-matemethod is usually applied to satisfy these two conditionsand obtain the approximate solution of a fading factor 120582
119896+1
such as calculating the traces directly in both sides of (53)and roughly determining1198810
119896+1through (59) to ensure that the
filtering algorithm can be calculated in real time
5 Simulation Results and Analysis
In this section to analyze and compare the performance ofthe proposed method in Section 4 and the existing EKF inSection 2 the simulation experiments of tracking a maneu-vering aircraft are implemented Assume that the initialposition velocity and turn rate of the aircraft in the two-dimensional plane are (1 km 1 km) (300ms 0ms) and0∘ sminus1 respectively The simulation aircraft trajectory is gen-erated as follows
(1) It moves with constant velocity during 0ndash26 s
(2) It maneuvers and moves with constant turn rate Ω =
5∘ sminus1 during 27ndash59 s
(3) It moves with constant velocity during 60ndash68 s
(4) It maneuvers and moves with constant turn rate Ω =
minus25∘ sminus1 during 69ndash73 s
(5) It moves with constant velocity during 74ndash100 s
Figures 1(a) 1(b) and 1(c) show the simulation trajectoryof the aircraft position velocity and turn rate respectivelyduring an interval of 0ndash100 s
Considering the coordinated turn model with unknownturn rateΩ in [19] there is bias between real value of turn rate
8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
0
5
10
15
2 4 6 8 10 12 140x position (km)
ypo
sitio
n (k
m)
(a)
20 40 60 80 1000Time (s)
minus300
minus200
minus100
0
100
200
300
400
500
Velo
city
(ms
)
x velocityy velocity
(b)
minus05
minus04
minus03
minus02
minus01
0
01
02
Turn
rate
(rad
s)
20 40 60 80 1000Time (s)
(c)
Figure 1 (a) Position trajectory (e initial point ◼ final point) 995333 radar location (b) Velocity trajectory (c) Turn rate trajectory
and estimate value of it and the bias leads to the model mis-match The mismatch kinematics model of the maneuveringaircraft can be obtained which is shown as follows
119883119896+1
=
[[[[[[[[[[
[
1sinΩ119879Ω
0cosΩ119879 minus 1
Ω0
0 cosΩ119879 0 minus sinΩ119879 0
01 minus cosΩ119879
Ω1
sinΩ119879Ω
0
0 sinΩ119879 0 cosΩ119879 0
0 0 0 0 1
]]]]]]]]]]
]
119883119896
+ 119908119896 119896 ge 0
(64)
where 119883 = [119909 119910 119910 Ω]119879 is state vector 119909 119910 and 119910
express the position and velocity in 119909 direction and 119910 direc-tion respectively Ω denotes turn rate 119879 denotes samplingperiod 119908
119896denotes the process noise which has zero mean
and covariance
119876 = 120583 sdot diag [1199021119872 1199022119872 1199023119879] (65)
where
119872 =
[[[
[
1198793
3
1198793
2
1198793
2119879
]]]
]
(66)
Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
the parameters 1199021= 01m2sminus3 119902
2= 01m2sminus3 and 119902
3=
175 times 10minus4 sminus3 respectively denote the coefficient of process
noise in 119909 direction 119910 direction and turn rateUsing two-dimensional radar location the origin of plane
measures the range and bearing of maneuvering aircraftThemeasurement can be calculated by the following equation
119911119896=[[
[
radic1199092
119896+ 1199102
119896
tanminus1 (119910119896
119909119896
)
]]
]
+ V119896 119896 ge 1 (67)
where V119896is radar measurement noise which has zero mean
and its covariance 119877 = diag [12059021199031205902
120579] where 120590
119903= 10m and
120590120579= radic10 times 10
minus3 rad Assume that the measurements appliedin the estimation have one sampling time random delay andthe measurements can be calculated as follows
119910119896= (1 minus 120574
119896) 119911119896+ 120574119896119911119896minus1 119896 gt 1 119910
1= 1199111 (68)
The 1199090= [1000m 300msminus1 1000m 0msminus1 0∘ sminus1]119879 is ini-
tial state In each simulation the initial state estimation 1199090is
selected randomly from119873(1199090 1198750|0) where the initial covari-
ance is
1198750|0
= diag [100m2 10m2sminus2 100m2 10m2sminus2 01 rad2sminus2] (69)
The period of sampling is 1 second and the total time of eachsimulation is 100 seconds
In order to compare the filtering performance the rootmean square error (RMSE) is chosen because it can yield ameasure which combines the bias and variance of a filterestimate At time 119896 both RMSEs of position are defined by
RMSE119896= (
1
119898
119898
sum
119899=1
((119909119899
119896minus 119909119899
119896)2
+ (119910119899
119896minus 119910119899
119896)2
))
12
1 le 119896 le 100
(70)
where 119898 denotes the total number of Monte Carlo experi-ment (119909119899
119896 119910119899
119896) and (119909119899
119896 119910119899
119896) respectively denote the simulated
position which can be replaced by true position and filteringestimate position when 119899th Monte Carlo experiment is runLike the RMSE of position the formulas of RMSE aboutvelocity and turn rate can also be defined
In situation I assuming 119898 = 1000 119901 = 05 120583 = 1and 120588 = 01 02 1 the average of RMSEs of positionvelocity and turn rate obtained by using the STFRDM isshown in Figure 2 The values of fading factor determined byforgetting factor are shown in Figure 3 As shown in Figures2 and 3 with the increase of the forgetting factor 120588 the meanof RMSEs about the proposed STFRDM is almost stable and120582119896+1
is insensitive to the value of 120588 Therefore the forgettingfactor is selected as 120588 = 095 in the following situation
In situation II assuming 119898 = 1 119901 = 05 and 120583 = 1 theRMSEs of position velocity and turn rate obtained by usingthe proposed STFRDM and the existing EKF are shown inFigures 4 5 and 6 respectively The values of fading factor
PositionVelocityTurn rate
04 06 08 102120588
0
50
100
150
Mea
n of
RM
SEs
Figure 2 Mean of RMSEs when 119898 = 1000 119901 = 05 120583 = 1 and120588 = 01 02 1
120588 = 09
120588 = 05
120588 = 01
20 40 60 80 1000Time k
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
Figure 3 Fading factors when 120588 = 01 05 and 09
determined by proposed STFRDM are shown in Figure 7The estimated autocovariance of 119909 and119910 position calculatedby STFRDM and the existing EKF is respectively shown inFigures 8 and 9 According to Figures 4ndash9 the analysis is asfollows
(1) During 0ndash68 seconds aircraft moves with constantvelocity at first and then maneuvers with lesser turnrate The values of fading factor are close to 1 and theproposed STFRDM deteriorates into the existing
10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
35
4
45
RMSE
pos
(km
)
Figure 4 RMSE of position when119898 = 1 119901 = 05 and 120583 = 1
STFRDMEKF
0
1
2
3
4
5
6
RMSE
vel(
kms
)
20 40 60 80 1000Time k
Figure 5 RMSE of velocity when119898 = 1 119901 = 05 and 120583 = 1
EKF In this case besides the RMSEs of positionvelocity and turn rate the estimated autocovarianceof119909 position and that of119910 position based on proposedSTFRDM and existing EKF are almost equal
(2) During 69ndash100 seconds aircraft maneuvers withgreater constant turn rate at first and thenmoves withconstant velocity Since the turn rate changes sud-denly both filters appear divergence In the diver-gence period the estimated autocovariance of 119909 posi-tion and that of 119910 position of STFRDM are largerthan the EKF and the RMSEs of existing EKF arelarger than the STFRDM The proposed STFRDMcan timely detect the increase of residual covarianceand through the fading factors adaptively increasing
STFRDMEKF
RMSE
ome
(rad
s)
20 40 60 80 1000Time k
0
05
1
15
2
25
Figure 6 RMSE of turn rate when119898 = 1 119901 = 05 and 120583 = 1
0
2
4
6
8
10
12
14
Fadi
ng fa
ctor
20 40 60 80 1000Time k
Figure 7 Fading factors when119898 = 1 119901 = 05 and 120583 = 1
the RMSEs reduce and the estimated autocovarianceof 119909 and 119910 position increases Comparing with theexisting EKF the increasing of estimated autocovari-ance of STFRDM can reflect the sudden change of119909 and 119910 position in time The decrease of RMSEsensures STFRDM having better tracking perfor-mance After the divergence period the RMSEs andthe estimated autocovariance of STFRDM quicklydecrease while the RMSEs and the estimated autoco-variance of EKF gradually increase in other wordsunlike the existing EKF the STFRDM can eliminatethe influence of the cumulative estimation error byincreasing the fading factor to avoid further diver-gence The above results verify that proposed STFRDM have the ability to deal with the problem ofsystem parametric variation
Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
times104
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
7
8
9
Auto
cova
rianc
e ofx
posit
ion
Figure 8 The estimated autocovariance of 119909 position when 119898 = 1119901 = 05 and 120583 = 1
times105
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
Auto
cova
rianc
e ofy
posit
ion
Figure 9 The estimated autocovariance of 119910 position when 119898 = 1119901 = 05 and 120583 = 1
For a judicial comparison the same condition is set to ini-tialize all the filters in each simulation and 1000 independentMonte Carlo experiments are carried out
In situation III assuming 119898 = 1000 119901 = 05 and 120583 =
1 the RMSEs of position velocity and turn rate obtainedby using the proposed STFRDM and the existing EKF areshown in Figures 10 11 and 12 respectively and the mean ofRMSEs in position velocity and turn rate is shown in Table 1
As shown in Table 1 and Figures 10 11 and 12 the RMSEsof existing EKF gradually increasing lead the EKF to divergedue to randomly selecting the initial state estimation 119909
0from
119873(1199090 1198750|0) in each run Contrarily the RMSEs of STFRDM
are convergent The performance of proposed STFRDM isbetter than existing EKF whatever in accuracy or conver-gence rate It is inferred that the proposed STFRDM can
STFRDMEKF
20 40 60 80 1000Time k
0
1
2
3
4
5
6
RMSE
pos
(km
)
Figure 10 RMSE of position when119898 = 1000 119901 = 05 and 120583 = 1RM
SEve
l(km
s)
STFRDMEKF
20 40 60 80 1000Time k
0
2
4
6
8
10
12
Figure 11 RMSE of velocity when119898 = 1000 119901 = 05 and 120583 = 1
Table 1 Mean of RMSEs when119898 = 1000 119901 = 05 and 120583 = 1
RMSE per state EKF STFRDMPosition km 1727 0144Velocity kms 3524 0079Turn rate rads 074 006
solve the problem of initial conditions uncertainty to improveestimation accuracy in spite of the existing EKF sensitive tothis problem Correspondingly when 119901 is equal to any othervalue during 0 to 1 similar result can be obtained
12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in EngineeringRM
SEom
e(r
ads
)
STFRDMEKF
20 40 60 80 1000Time k
0
05
1
15
2
25
3
Figure 12 RMSE of turn rate when119898 = 1000 119901 = 05 and 120583 = 1
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
Mea
n of
RM
SE in
pos
ition
02 03 04 05 06 07 08 0901p
Figure 13 Mean of RMSE in position when 119898 = 1000 120583 = 1 and119901 = 01 02 09
In situation IV assuming 119898 = 1000 120583 = 1 and 119901 =
01 02 09 the mean of RMSE in position about twofilters is shown in Figure 13 The mean of the proposed STFRDM is smaller than the existing EKF which reflects thatthe filtering performance of proposed STFRDMprecedes theexisting EKFwhen the delay probability 119901 has a large range ofchange In particular as 119901 increases both mean of proposedSTFRDM and that of existing EKF are obviously decreasedbut the STFRDM has better filtering performance when 119901 isequal to greater value
STFRDMEKF
100
200
300
400
500
600
700
800
900
1000
1100
Mea
n of
RM
SE in
pos
ition
12 13 14 15 16 17 18 1911120583
Figure 14 Mean of RMSE in position when119898 = 1000 119901 = 05 and120583 = 11 12 19
In situation V assuming 119898 = 1000 119901 = 05 and 120583 =
11 12 19 the mean of RMSE in position about twofilters is shown in Figure 14 As shown in Figure 14 with theincrease of the noise level 120583 the mean of RMSE about theexisting EKF is increasing while it is inspiring to find thatthe mean of RMSE about the proposed STFRDM is almoststable
Generally speaking it can be found that the proposedSTFRDM has the definite robustness to the different changeof the delay probability and the noise level on the basis of thesimulation analysis from Figures 13 and 14
6 Conclusion
In this paper for the tracking problem of one sampling timerandomly delayed measurements in nonlinear system a newalgorithm of STFRDM is proposed The recursive operationof this algorithm is carried out by first-order linearizationapproximation When the model is inexact for examplemodel simplification noise characteristics initial condi-tions uncertainty or system parametric variation based onextended orthogonality principle the proposed STFRDMcan timely detect the change of residual covariance and keepwell ability of tracking by changing the fading factor onlineThe simulation experiments are carried out to prove the pro-posed STFRDM having good performance Also the resultsshow that STFRDM is better than existing EKF in copingwith the problem of tracking maneuvering target Analyzingthe outcome of simulation the conclusion is that proposedSTFRDMhasmore high accuracy and robustness than exist-ing EKF for the problem of model mismatch when trackingmaneuvering target besides advantages of existing EKF Sincethe proposed STFRDM is general filtering method it canbe applied to some relevant research areas such as fault
Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
diagnosis signal processing and state estimation of dynamicsystem
Appendix
Equation (31) is the criterion of the existing EKF the deriva-tion of which is presented as follows
First considering that V119896+1
is uncorrelated with 119884119896 it is
clear that
119901 (V119896+1
| 119884119896) = 119873 (V
119896+1 0 119877119896+1) (A1)
According to the Gaussian distributions 119901(119909119896+1
| 119884119896) and
119901(V119896+1
| 119884119896) the one-step posterior predictive PDF of the
augmented state 119909119886119896+1
conditioned by119884119896is also Gaussian that
is
119901 (119909119886
119896+1| 119884119896) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896 119875119886
119896+1|119896) 119896 gt 0 (A2)
where in the MMSE sense the augmented state prediction119909119886
119896+1|119896and the covariance 119875119886
119896+1|119896 respectively express the first
two moments of 119901(119909119886119896+1
| 119884119896)
119909119886
119896+1|119896= 119864 [119909
119886
119896+1| 119884119896]
119875119886
119896+1|119896= 119864 [119909
119886
119896+1|119896(119909119886
119896+1)119879
| 119884119896]
(A3)
Second according to the Gaussian distributions 119901(119910119896+1
|
119884119896) and 119901(119909119886
119896+1| 119884119896) the joint posterior PDF of 119909119886
119896+1and 119910119896+1
conditioned by 119884119896is also Gaussian that is
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
= 119873((
119909119886
119896+1
119910119896+1
) (
119909119886
119896+1|119896
119910119896+1
) (
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
))
(A4)
From the computation rule of the Gaussian distribution in[15] rearranging (A4) yields
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
=1
((2120587)119899100381610038161003816100381610038161003816119875119886
119896+1|119896minus 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
(119875119886119910
119896+1|119896)119879100381610038161003816100381610038161003816)
12
sdot exp[
[
minus1
2(
119909119886
119896+1|119896
119910119896+1
)
119879
sdot ((
119875119886
119896+1|119896119875119886119910
119896+1|119896
(119875119886119910
119896+1|119896)119879
119875119910119910
119896+1|119896
)
minus1
minus (
0 0
0 (119875119910119910
119896+1|119896)minus1))
sdot (
119909119886
119896+1|119896
119910119896+1
)]
]
119901 (119910119896+1
| 119884119896)
(A5)
According to the Bayesian rule we get
119901 (119909119886
119896+1| 119884119896+1) =
119901 (119909119886
119896+1 119910119896+1
| 119884119896)
119901 (119910119896+1
| 119884119896)
(A6)
Further119901(119909119886119896+1
| 119884119896+1) can be updated to beGaussian in (A7)
by substituting (A5) into (A6)
119901 (119909119886
119896+1| 119884119896+1) = 119873 (119909
119886
119896+1 119909119886
119896+1|119896+1 119875119886
119896+1|119896+1) (A7)
We can conclude that according to the criteria of MMSEshowed in (31) the Gaussian approximation of 119901(119909119886
119896+1|
119884119896+1) has the filtering estimation 119909119886
119896+1|119896+1and the covariance
119875119886
119896+1|119896+1at time 119896 + 1 of the augmented state as the unified
form
119909119886
119896+1|119896+1= 119909119886
119896+1|119896+ 119870119886
119896+1119910119896+1|119896
119875119886
119896+1|119896+1= 119875119886
119896+1|119896minus 119870119886
119896+1119875119910119910
119896+1|119896(119870119886
119896+1)119879
119870119886
119896+1= [
119870119909
119896+1
119870V119896+1
] = 119875119886119910
119896+1|119896(119875119910119910
119896+1|119896)minus1
= [
119875119909119910
119896+1|119896
119875V119910119896+1|119896
] (119875119910119910
119896+1|119896)minus1
(A8)
where 119870119886119896+1
express the gain matrix of the estimated state ofaugmentation and 119909119886
119896+1|119896 119875119886119896+1|119896
119910119896+1|119896
119875119910119910119896+1|119896
and 119875119886119910119896+1|119896
havebeen obtained by (8) (15) and (17)ndash(19)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
Any advice and comments put forward by reviewers andeditor will be appreciated by the authors of this paper
References
[1] M Simandl J Kralovec and T Soderstrom ldquoAdvanced point-mass method for nonlinear state estimationrdquo Automatica vol42 no 7 pp 1133ndash1145 2006
[2] D Crisan and K Li ldquoGeneralised particle filters with Gaussianmixturesrdquo Stochastic Processes and their Applications vol 125no 7 pp 2643ndash2673 2015
[3] M S Grewal and A P Andrews Kalman Filtering Theory andPractice Using MATLAB John Wiley amp Sons New York NYUSA 2nd edition 2001
[4] M Noslashrgaard N K Poulsen and O Ravn ldquoNew developmentsin state estimation for nonlinear systemsrdquo Automatica vol 36no 11 pp 1627ndash1638 2000
[5] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[6] I Arasaratnam S Haykin and R J Elliott ldquoDiscrete-time non-linear filtering algorithms using Gauss-Hermite quadraturerdquoProceedings of the IEEE vol 95 no 5 pp 953ndash977 2007
[7] I Arasaratnam and S Haykin ldquoCubature kalman filtersrdquo IEEETransactions on Automatic Control vol 54 no 6 pp 1254ndash12692009
14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
[8] D H Zhou and P M Frank ldquoStrong tracking filtering ofnonlinear time-varying stochastic systems with coloured noiseapplication to parameter estimation and empirical robustnessanalysisrdquo International Journal of Control vol 65 no 2 pp 295ndash307 1996
[9] Z Zhang and J Zhang ldquoA strong tracking nonlinear robust filterfor eye trackingrdquo Journal of ControlTheory andApplications vol8 no 4 pp 503ndash508 2010
[10] D-J Jwo C-F Yang C-H Chuang and T-Y Lee ldquoPerfor-mance enhancement for ultra-tight GPSINS integration usinga fuzzy adaptive strong tracking unscented Kalman filterrdquoNonlinear Dynamics vol 73 no 1-2 pp 377ndash395 2013
[11] M Narasimhappa S L Sabat and J Nayak ldquoAdaptive samplingstrong tracking scaled unscentedKalmanfilter for denoising thefibre optic gyroscope drift signalrdquo IET Science Measurement ampTechnology vol 9 no 3 pp 241ndash249 2015
[12] A Hermoso-Carazo and J Linares-Perez ldquoExtended andunscented filtering algorithmsusing one-step randomly delayedobservationsrdquo Applied Mathematics and Computation vol 190no 2 pp 1375ndash1393 2007
[13] A Hermoso-Carazo and J Linares-Perez ldquoUnscented filteringalgorithm using two-step randomly delayed observations innonlinear systemsrdquoAppliedMathematicalModelling vol 33 no9 pp 3705ndash3717 2009
[14] R Caballero-Aguila A Hermoso-Carazo J D Jimenez-LopezJ Linares-Perez and S Nakamori ldquoRecursive estimation ofdiscrete-time signals from nonlinear randomly delayed obser-vationsrdquo Computers andMathematics with Applications vol 58no 6 pp 1160ndash1168 2009
[15] XWang Y LiangQ Pan andC Zhao ldquoGaussian filter for non-linear systems with one-step randomly delayed measurementsrdquoAutomatica vol 49 no 4 pp 976ndash986 2013
[16] T-T Chien and M B Adams ldquoA sequential failure detectiontechnique and its applicationrdquo IEEE Transactions on AutomaticControl vol 21 no 5 pp 750ndash757 1976
[17] C Bonivento andA Tonielli ldquoA detection estimationmultifilterapproach with nuclear applicationrdquo in Proceeding of the 9thTriennial World Congress of IFAC pp 1771ndash1776 July 1984
[18] D H Zhou Y G Xi and Z J Zhang ldquoA suboptimal multiplefading extended Kalman Filterrdquo Chinese Journal of Automationvol 4 no 2 pp 145ndash152 1992
[19] Y Bar-Shalom X Li and T Kirubarajan Estimation withApplications to Tracking and Navigation Theory Algorithms andSoftware John Wiley amp Sons New York NY USA 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of