Embed Size (px)
Citation preview

Research ArticleSource Geolocation in Urban Environments UsingMultipath Fingerprinting
Ram M Narayanan1 Brian R Phelan1 and Erik H Lenzing2
1Department of Electrical Engineering The Pennsylvania State University University Park PA 16802 USA2The Applied Research Laboratory State College PA 16803 USA
Correspondence should be addressed to RamM Narayanan rameepsuedu
Received 16 December 2014 Revised 18 March 2015 Accepted 18 March 2015
Academic Editor Ana Alejos
Copyright copy 2015 RamM Narayanan et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A method for determining the location of Global Systems for Mobile Communications (GSM) mobile transmitters is proposedOur approach estimates the location of a source without the use of multilateration or Line-of-Sight (LOS) techniques A MultipathCharacteristic Database (MCD) containing the multipath feature vectors for each possible transmitter location within an areaof interest is populated via ray-tracing software simulations The multipath characteristics of interest are angle-of-arrival (AOA)(azimuth) and time-of-arrival (TOA) By minimizing the ldquodistancerdquo between estimated and simulated multipath feature vectorsan estimate for the actual source location can be obtained The development of the estimation method is presented followed bya detailed analysis of its estimation accuracy Since the proposed method utilizes a simulated multipath signature database basedupon the knowledge of the environment and the terrain the need for a priori soundings from the area of interest is eliminated thusmaking this location estimation system suitable for application in denied territories Location accuracies compare favorably withthe requirements for the location of wireless 9-1-1 callers as recommended by the Federal Communications Commission (FCC)
1 Introduction
Spatial localization of cellular emitters in dense urban envi-ronments can provide a valuable tool for a variety of userssuch as emergency services law enforcement and militarypersonnel Navigation social media and location-dependentsearching would also benefit from advances in localizationtechniquesThe ability to use Non-Line-of-Sight (NLOS) andnonmultilateration techniques would allow the end user toperform the localization from an arbitrary position anywherewithin a given range of the target
The concept of using the multipath fingerprint composedof time- and angle-of-arrival data forwireless location findingin urban environments was developed using electromagneticray-tracing techniques and validated using computer-aideddesign (CAD) models of a real city [1] The fundamentalpremise of this approach is to extract the features of themultipath signals to create a unique fingerprint such asangle-of-arrival time delay and signal strength which isthen compared to a database of known fingerprints each
corresponding to a known location A matching fingerprintfound in the database provides an estimate for the correctlocation of the transmitter A fingerprinting technique usingthe channelrsquos impulse response information combined withan artificial neural network was developed for geolocation inmines or other confined environments with rough sidewallsurfaces with a location accuracy of 2m [2] A fingerprintingtechnique exploiting the spatial-temporal characteristics ofthe multipath signals received by the base station antennaarray was proposed in [3] The spatial-temporal fingerprintwas based on a lower dimensional subspace of the spatial-temporal covariance matrix capturing the AOAs and thedifferential delays of the dominant multipath reflectionsLocalization accuracies of about 1m were achieved in typicalindoor environments Similar fingerprinting techniques werealso proposed and developed for emergency location services[4] Global Navigation Satellite System (GNSS) indoor posi-tioning [5] indoor geolocation for ultrawideband (UWB)systems [6] and channel estimation inmultipath-richmobilecommunication scenarios [7]
Hindawi Publishing CorporationInternational Journal of Antennas and PropagationVolume 2015 Article ID 453157 11 pageshttpdxdoiorg1011552015453157
2 International Journal of Antennas and Propagation
The method discussed here compares simulated andmeasured signal characteristics based only upon multipathpropagation to provide an estimate for the location of a GSMemitter Our approach is different from the one adopted in [1]in that while their base station is located solely within theirarea of interest ours may be located both inside and outsideof the area of interest the latter generally occurring in deniedenvironments Having the base station in the center yieldshigher variability in theAOA For base stations locatedwithinthe area of interest AOAs are distributed over a 360-degreespread However for base stations located outside the area ofinterest AOAs are mostly restricted to be within a 180-degreespread
The Federal Communications Commission (FCC)recently issued its Third Further Notice of ProposedRulemaking and proposed the following specific measures intheir E911 location accuracy rules to ensure accurate indoorlocation information [8] According to their guidelineslocation accuracies must be within 100 meters for 67 percentof calls and 300 meters for 90 percent of calls for network-based technologies and within 50 meters for 67 percent ofcalls and 150 meters for 90 percent of calls for handset-basedtechnologies Network-based technologies have less stringentrequirements compared to handset-based technologies Ourapproach addresses the network-based case and thereforeaims to satisfy the first set of requirements stated aboveIn addition our approach avoids the use of received signalstrength (RSS) as these are dependent on various unknownfactors such as transmit power reflectivity of walls andpropagation characteristics which do not largely impactTOA and AOA
Through the use of ray-tracing software a MCD ispopulated via simulations which contains a feature vectorfor possible transmitter locations within an area of interestTheMCD is then used to find possible transmit locations thathave similar multipath characteristics to that of the estimatedparametersThemultipath characteristic estimators used hereare joint angle delay estimation-multiple signal classification(JADE-MUSIC) and JADE Estimation of Signal Parametersvia Rotational Invariance Techniques (JADE-ESPRIT) A119870-Weighted Nearest Neighbor (KWNN) distance metricbetween the estimated and simulated feature vectors is usedto determine the final geolocation estimate An analysis onthe geolocation algorithmrsquos performance is presented whichshows the effect of SNR receiver location oversamplingrate and number of antenna elements The computationalcomplexity of the JADE-MUSIC and JADE-ESPRIT is alsoanalyzed
Although GSM telephony was used in the analysis pre-sented in subsequent sections our proposed estimation tech-niques can be applied to all narrowband Time Division Mul-tiple Access (TDMA) systems (which operate in multipath-rich environments) This paper discusses the results of aninvestigation of our proposed localization technique andextends thework previously reported by us in [9] New resultsreported here include geolocation estimates derived fromthe JADE-ESPRIT algorithm as well a comparison betweenestimates using a receiver located inside and outside the areaof interest A summary of the implemented algorithms is
included as well as result comparisons for various SNRsoversampling rates and number of antenna elements used
This paper is organized as follows Section 2 provides thelinear approximation of GSM signals used in the estimationportion of the localization technique Section 3 provides anintroduction to the JADE estimation techniques Section 4discusses the creation of the MCD via ray-tracing softwareSection 5 discusses the geolocation fingerprint matchingtechnique An analysis of the performance of the geolocationestimator is given in Section 6 Finally Section 7 containsa summary and future work for the development of theproposed method
2 Linear Approximation of GaussianMinimum-Shift Keying (GMSK)
GSM systems utilize a GMSK modulation scheme [10]A method for representing digital phase modulations viasuperposition of amplitudemodulated pulses was introducedby Laurent in [11] this method was further investigated forsignals with modulation index 12 in [12] and for GMSK in[13] Wiesler et al show that a GMSK signal with the GSMparameters (BT = 03 119871 = 4) can be decomposed into linearand nonlinear parts 119904lin(119905) + 119904nlin(119905) [13]
119904 (119905) =
infin
sum
119899=0
exp[119895120587
2
119899
sum
119894=0
119886119894]1198620(119905 minus 119899119879)
+
infin
sum
119899=0
7
sum
119870=1
119890119895120587119860119870119899119862
119870(119905 minus 119899119879)
= 119904lin(119905) + 119904
nlin(119905)
(1)
where
1198620(119905) =
119878 (119905)
4
prod
119897=1
119878 (119905 + 119897 sdot 119879) 0 le 119905 le 5119879
0 otherwise(2)
119878(119905) is defined as
119878 (119905) =
sin [120587int119905
0
ℎgauss (120591) 119889120591] 0 le 119905 le 4119879
sin [(1205872) minus 120587int
119905
0
ℎgauss (120591) 119889120591] 4119879 le 119905 le 8119879
0 otherwise(3)
and 119886119894is the NRZ data stream Since119862
119870and119860
119870119899(for119870 ge 1)
are only found in the 119904nlin we have omitted their definitionshere General expressions for 119862
119870and 119860
119870119899are given in
equations 11 and 13 of [11] respectively Wiesler et al showthat approximating 119904(119905) solely by its linear term results in aBER performance as good as or (for good SNR) even betterthan the exact GMSK representationWe further simplify ourrepresentation of the GMSK modulated signal by setting the
International Journal of Antennas and Propagation 3
exponential term in 119904lin of (1) equal to 119911119899Therefore our linear
approximation yields
119904 (119905) asymp 119904lin(119905) =
infin
sum
119899=0
1199111198991198620(119905 minus 119899119879) (4)
where 1198620can be considered to represent the pulse shaping
modulation function of a linear modulation scheme Thisresult is used in JADE techniques presented in subsequentsections
3 Joint Angle Delay Estimation (JADE)
The coherence time of the (Rayleigh) fading in the mobilechannel is roughly given by 119905coh = 119888(V sdot 119891
119888) [14] This yields
a coherence time of 160ms for a mobile moving at a walkingspeed and 56ms for a mobile moving at a highway speedThe fading can therefore be modeled as time-invariant fora single GSM frame at highway speeds and for up to 30frames for walking speeds Subsequently for a transmittermoving at highway speeds or lower the wireless channelhas path fadings that are constant over multiple GSM timeslots An adaptation to the JADE techniques discussed here ispresented in [15] which considers channels with path fadingsvarying within the duration of a time slot The angles anddelays of the received multipaths vary much slower than themobile channel fading therefore we model these as time-invariant over many GSM frames [14]
Vanderveen et al have developed JADE techniques basedon the above assumptions The 119902-multipath channel modelfor a 119875-element antenna array takes the following form (see[14 16] for a complete analysis)
H = [a (1205791) sdot sdot sdot a (120579
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
g119879 (1205911)
g119879 (120591119902)
]]]]
]
= A (120579) diag [120573]G119879 (120591)
(5)
where a(120579119894) is the steering vector of the 119894th multipath and
A(120579) is the 119875 times 119902 steering matrix The diagonal matrixof 120573 values denotes the complex attenuations associatedwith each multipath g(120591
119894) denotes the 119894th delayed pulse
shaping modulation function as shown in (2) and G119879(120591)is a 119902 times 119871119874 matrix containing the 119902 time-delayed pulseshaping functions119871 defines the length of the channel impulseresponse in symbol periods and119874 is the oversampling factor
Unlike GSMrsquos modulation scheme which can be decom-posed into both linear and nonlinear parts the pulse-shapingmodulation function is associated with an entirely linearmodulation scheme The aforementioned linear approxima-tion of the GSM signal was used to accommodate thisrequirement
31 JADE-MUSIC Algorithm Vanderveen et al eventuallyarrive at a vectorized noisy channel estimate of the followingform [16]
vec (H(119899)est ) = y
= [G (120591) ∘ A (120579)]120573(119899)
+ k(119899)
= U (120579 120591)120573(119899)
+ k(119899) 119899 = 1 119873
(6)
where ∘ denotes a column-wise Kronecker product k(119899)
denotes the estimate noise and the superscript sdot(119899) denotesthe 119899th channel estimate Here U(120579 120591) is time-invariant over119873 channel estimates where 119873 is determined based on thestationarity of the AOAs and TOAs for a given multipathscenario The channel estimation rate is determined by thetemporal coherence of the channel path fadingsThe channelshould be estimated once over the coherence time of thechannel path fadings (ie the channel can be estimated onthe order of a frame for a mobile moving at highway speedsand once every 30 frames for a mobile moving at a walkingspeed) After estimating 119873 channels (6) can be representedin matrix form as
Y = U (120579 120591)B + V (7)
where B = [120573(1)
sdot sdot sdot120573(119873)
] and Y and V have similar form A2-dimensional MUSIC algorithm can now be applied to find120591 and 120579 TheMUSIC algorithm will result in a joint delay andangle estimation under the following restrictions
(1) Thenumber ofmultipaths 119902 must be less than119875sdot119871sdot119874(2) Thenumber of channel estimates usedmust be greater
than the number of multipaths(3) The collection timemust be longer than the coherence
time (for fadings) of the mobile channel
A significant consequence of these restrictions is that thenumber of antenna elements needed can be reduced to lessthan the number of multipaths if an adequate number ofsamples are obtained
32 JADE-ESPRIT Algorithm The JADE-ESPRIT algorithmmanipulates the form of the channel estimate matrix so that a2D ESPRIT-like algorithm can be applied First the discreteFourier transform is applied to theH in (5)The pulse shapingfunction is then deconvolved from the Fourier-transformedchannel estimate (see [16] for details) whereby the channelnow satisfies the following model
H = [a (1205951) sdot sdot sdot a (120595
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
f119879 (1206011)
f119879 (120601119902)
]]]]
]
= A (120595) diag [120573] F119879 (120601)
(8)
where 120595119894= exp(minus1198952120587(119889120582) sin(120579
119894)) 120601119894= exp(minus119895(2120587119871)120591
119894)
and a119879(120595119894) = [1120595
1
119894sdot sdot sdot 120595119875minus1
119894] and f(120601
119894) = [1120601
1
119894sdot sdot sdot 120601119871119874minus1
119894]
4 International Journal of Antennas and Propagation
Applying a similar vectorization and stacking operation asin the JADE-MUSIC algorithm the vectorized noisy channelestimate becomes
Y = U (120595120601)B + V (9)
where U(120595120601) = F(120601)∘A(120595) Next a basis of the column spanof U(120595120601) is estimated via the 119902 left singular vectors whichcorrespond to the largest values of covariance matrix RY A2D ESPRIT algorithm is now applied and estimates for 120591 and120579 can be obtained
The restrictions of the JADE-ESPRIT algorithm areslightly stricter than those of the JADE-MUSIC algorithmin addition to the aforementioned JADE-MUSIC restrictionsThe number of multipaths must be less than min(119875(119871119882 minus
1) (119875 minus 1)119871119882) where 119882 is a factor used in the DFT (takenas 1 here)
4 Multipath Characteristic Database Analysis
Remcomrsquos Wireless InSite ray-tracing software was used topopulate the MCD which contains location-based multipathfeature vectors to be used as a basis for a fingerprint matchingalgorithm A grid of transmitters was placed over the areaof interest and then various multipath characteristics of thereceived signal are collected for each transmitter locationFor the analysis here only the AOA (azimuth) and TOAwere considered for utmost simplicity and for minimizingprocessing and time requirements however the multipathfeature vector could be expanded to contain (a) number ofreceived multipaths (b) AOA (azimuth and elevation) ofeach multipath (c) TOA of each multipath (d) receivedsignal strength (RSS) of each multipath (e) delay spreadamongst rays and (f) mean and standard deviation of allaforementioned multipath characteristics Although addingadditional features may doubtlessly increase the locationaccuracy this would entail higher latency owing to excessiveprocessing requirements
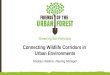
A model of downtown State College Pennsylvania wasused in the ray-tracing simulation The model consistedof concrete buildings placed on top of the appropriateelevation (ie landscape) Transmitters were spaced in 35-meter increments along the 119909- and 119910-axes at a height of 2meters (with respect to the ground)The grid covered a 1 km2area and consisted of 81796 transmitters The receiver wasplaced at two different locations represented by Scenario Alocated outside the area of interest and Scenario B locatedwithin the area of interest For Scenario A the receiver wasplaced on top of the Applied Research Laboratory buildingof The Pennsylvania State University at a height of 10 meters(approximately 2 meters above the building height) ForScenario B the receiver was placed on top of the HUB-Robeson Center of The Pennsylvania State University ata height of 12 meters (approximately 2 meters above thebuilding height) Figure 1 shows the 2D representation ofthe Wireless InSite model overlaid on a satellite image ofState College PAThe transmit antennas were dipoles alignedperpendicular to the ground and isotropic antennas wereused in the receiver antenna array
Figure 1 2D representation of theWireless InSitemodel overlaid onsatellite image of State College PA The transmitter grid covers theblue overlay Rx1 corresponds to the receiver location of Scenario Aand Rx2 corresponds to the receiver location of Scenario B copy 2013Google Earth
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
2
4
6
8
10
12
14
16
18
x-location (km)
y-lo
catio
n (k
m)
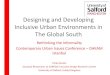
Figure 2 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario A Data plotted for the dominantmultipath
A 3D ray-tracing model was used in the creation of theMCDThe ray-tracingmodel considered building reflectionsdiffractions and ground interactionsThemodel was capableof analyzing LOS singly diffracted and doubly diffractedpaths The building faces were chosen to be one-sidedwhich only allow for transmission from inside the buildingto outside This choice was made because the number oftransmissions greatly increases the computation time andmultipaths which underwent attenuation through 2 walltransmissions would be significantly weaker than multipathswhich did not undergo wall transmissions The maximumnumber of reflections allowed was 6 and the maximumnumber of diffractions allowed was 2 this allows for raysbetween the receiver and transmitters which are blocked bythe height of a building A simulated GSM signal with centerfrequency 119891
119888 of 191 GHz was used
Figures 2ndash4 display the diversity of the MCD dataobtained via our simulations for Scenario A Figure 2 showsthe TOAof the dominantmultipath for each transmitter loca-tion The TOA generally increases as the distance betweenthe receiver and the transmitters increases Some outliersexist which represent multipaths which underwent multiple
International Journal of Antennas and Propagation 5
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 3 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario A Data plotted for thedominant multipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus180
minus160
minus140
minus120
minus100
minus80
minus60
x-location (km)
y-lo
catio
n (k
m)
Figure 4 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario A Data plotted for thedominant multipath
reflections Figure 3 shows the AOA in the azimuth planefor the dominant multipath of each transmitter The AOA(azimuth) is influenced more by the surrounding environ-ment of each transmitter than the distance between transmit-ter and receiver Figure 4 displays the received power of thedominant multipath for each transmitter location Figure 4shows a strong (negative) correlation between the receivedsignal strength and the distance between the transmitterand receiver as expected The properties for each multipathcharacteristic can be exploited to produce optimal clusteringschemes
Figures 5ndash7 show similar plots for Scenario B Figure 5shows the TOA Figure 6 the AOA and Figure 7 the receivedpower The main differences between these plots and thosefor Scenario A are the increase in the AOA variation overshort distances and the decrease in the spread of TOA valuesSince the transmitter is placed inside the area of interest
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
2
4
6
8
10
x-location (km)
y-lo
catio
n (k
m)
Figure 5 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario B Data plotted for the dominantmultipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 6 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario B Data plotted for thedominant multipath
the dominant multipaths from adjacent transmitters are lesslikely to follow similar paths due to a lower number ofobstructions between the transmitter and receiver This isevident when comparing Figure 3 with Figure 6 wherein theformer contains large areas where the dominant paths (fromneighboring transmitters) arrive from similar directionswhile the latter has greater variation in AOA over shortdistances Scenario A is better suited for our geolocationalgorithm as an error in the AOA estimate may result ina geolocation estimate of a transmitter that is close to theactual transmit location Furthermore the TOA variabilitybetween neighboring transmitters also appears to be lowerfor Scenario A than Scenario B Although it is not alwayspossible Scenario A is preferred
Depending on the size of the area of interest andspatial density of the transmitters the MCD can containan enormous amount of information One way to reduce
6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Antennas and Propagation
The method discussed here compares simulated andmeasured signal characteristics based only upon multipathpropagation to provide an estimate for the location of a GSMemitter Our approach is different from the one adopted in [1]in that while their base station is located solely within theirarea of interest ours may be located both inside and outsideof the area of interest the latter generally occurring in deniedenvironments Having the base station in the center yieldshigher variability in theAOA For base stations locatedwithinthe area of interest AOAs are distributed over a 360-degreespread However for base stations located outside the area ofinterest AOAs are mostly restricted to be within a 180-degreespread
The Federal Communications Commission (FCC)recently issued its Third Further Notice of ProposedRulemaking and proposed the following specific measures intheir E911 location accuracy rules to ensure accurate indoorlocation information [8] According to their guidelineslocation accuracies must be within 100 meters for 67 percentof calls and 300 meters for 90 percent of calls for network-based technologies and within 50 meters for 67 percent ofcalls and 150 meters for 90 percent of calls for handset-basedtechnologies Network-based technologies have less stringentrequirements compared to handset-based technologies Ourapproach addresses the network-based case and thereforeaims to satisfy the first set of requirements stated aboveIn addition our approach avoids the use of received signalstrength (RSS) as these are dependent on various unknownfactors such as transmit power reflectivity of walls andpropagation characteristics which do not largely impactTOA and AOA
Through the use of ray-tracing software a MCD ispopulated via simulations which contains a feature vectorfor possible transmitter locations within an area of interestTheMCD is then used to find possible transmit locations thathave similar multipath characteristics to that of the estimatedparametersThemultipath characteristic estimators used hereare joint angle delay estimation-multiple signal classification(JADE-MUSIC) and JADE Estimation of Signal Parametersvia Rotational Invariance Techniques (JADE-ESPRIT) A119870-Weighted Nearest Neighbor (KWNN) distance metricbetween the estimated and simulated feature vectors is usedto determine the final geolocation estimate An analysis onthe geolocation algorithmrsquos performance is presented whichshows the effect of SNR receiver location oversamplingrate and number of antenna elements The computationalcomplexity of the JADE-MUSIC and JADE-ESPRIT is alsoanalyzed
Although GSM telephony was used in the analysis pre-sented in subsequent sections our proposed estimation tech-niques can be applied to all narrowband Time Division Mul-tiple Access (TDMA) systems (which operate in multipath-rich environments) This paper discusses the results of aninvestigation of our proposed localization technique andextends thework previously reported by us in [9] New resultsreported here include geolocation estimates derived fromthe JADE-ESPRIT algorithm as well a comparison betweenestimates using a receiver located inside and outside the areaof interest A summary of the implemented algorithms is
included as well as result comparisons for various SNRsoversampling rates and number of antenna elements used
This paper is organized as follows Section 2 provides thelinear approximation of GSM signals used in the estimationportion of the localization technique Section 3 provides anintroduction to the JADE estimation techniques Section 4discusses the creation of the MCD via ray-tracing softwareSection 5 discusses the geolocation fingerprint matchingtechnique An analysis of the performance of the geolocationestimator is given in Section 6 Finally Section 7 containsa summary and future work for the development of theproposed method
2 Linear Approximation of GaussianMinimum-Shift Keying (GMSK)
GSM systems utilize a GMSK modulation scheme [10]A method for representing digital phase modulations viasuperposition of amplitudemodulated pulses was introducedby Laurent in [11] this method was further investigated forsignals with modulation index 12 in [12] and for GMSK in[13] Wiesler et al show that a GMSK signal with the GSMparameters (BT = 03 119871 = 4) can be decomposed into linearand nonlinear parts 119904lin(119905) + 119904nlin(119905) [13]
119904 (119905) =
infin
sum
119899=0
exp[119895120587
2
119899
sum
119894=0
119886119894]1198620(119905 minus 119899119879)
+
infin
sum
119899=0
7
sum
119870=1
119890119895120587119860119870119899119862
119870(119905 minus 119899119879)
= 119904lin(119905) + 119904
nlin(119905)
(1)
where
1198620(119905) =
119878 (119905)
4
prod
119897=1
119878 (119905 + 119897 sdot 119879) 0 le 119905 le 5119879
0 otherwise(2)
119878(119905) is defined as
119878 (119905) =
sin [120587int119905
0
ℎgauss (120591) 119889120591] 0 le 119905 le 4119879
sin [(1205872) minus 120587int
119905
0
ℎgauss (120591) 119889120591] 4119879 le 119905 le 8119879
0 otherwise(3)
and 119886119894is the NRZ data stream Since119862
119870and119860
119870119899(for119870 ge 1)
are only found in the 119904nlin we have omitted their definitionshere General expressions for 119862
119870and 119860
119870119899are given in
equations 11 and 13 of [11] respectively Wiesler et al showthat approximating 119904(119905) solely by its linear term results in aBER performance as good as or (for good SNR) even betterthan the exact GMSK representationWe further simplify ourrepresentation of the GMSK modulated signal by setting the
International Journal of Antennas and Propagation 3
exponential term in 119904lin of (1) equal to 119911119899Therefore our linear
approximation yields
119904 (119905) asymp 119904lin(119905) =
infin
sum
119899=0
1199111198991198620(119905 minus 119899119879) (4)
where 1198620can be considered to represent the pulse shaping
modulation function of a linear modulation scheme Thisresult is used in JADE techniques presented in subsequentsections
3 Joint Angle Delay Estimation (JADE)
The coherence time of the (Rayleigh) fading in the mobilechannel is roughly given by 119905coh = 119888(V sdot 119891
119888) [14] This yields
a coherence time of 160ms for a mobile moving at a walkingspeed and 56ms for a mobile moving at a highway speedThe fading can therefore be modeled as time-invariant fora single GSM frame at highway speeds and for up to 30frames for walking speeds Subsequently for a transmittermoving at highway speeds or lower the wireless channelhas path fadings that are constant over multiple GSM timeslots An adaptation to the JADE techniques discussed here ispresented in [15] which considers channels with path fadingsvarying within the duration of a time slot The angles anddelays of the received multipaths vary much slower than themobile channel fading therefore we model these as time-invariant over many GSM frames [14]
Vanderveen et al have developed JADE techniques basedon the above assumptions The 119902-multipath channel modelfor a 119875-element antenna array takes the following form (see[14 16] for a complete analysis)
H = [a (1205791) sdot sdot sdot a (120579
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
g119879 (1205911)
g119879 (120591119902)
]]]]
]
= A (120579) diag [120573]G119879 (120591)
(5)
where a(120579119894) is the steering vector of the 119894th multipath and
A(120579) is the 119875 times 119902 steering matrix The diagonal matrixof 120573 values denotes the complex attenuations associatedwith each multipath g(120591
119894) denotes the 119894th delayed pulse
shaping modulation function as shown in (2) and G119879(120591)is a 119902 times 119871119874 matrix containing the 119902 time-delayed pulseshaping functions119871 defines the length of the channel impulseresponse in symbol periods and119874 is the oversampling factor
Unlike GSMrsquos modulation scheme which can be decom-posed into both linear and nonlinear parts the pulse-shapingmodulation function is associated with an entirely linearmodulation scheme The aforementioned linear approxima-tion of the GSM signal was used to accommodate thisrequirement
31 JADE-MUSIC Algorithm Vanderveen et al eventuallyarrive at a vectorized noisy channel estimate of the followingform [16]
vec (H(119899)est ) = y
= [G (120591) ∘ A (120579)]120573(119899)
+ k(119899)
= U (120579 120591)120573(119899)
+ k(119899) 119899 = 1 119873
(6)
where ∘ denotes a column-wise Kronecker product k(119899)
denotes the estimate noise and the superscript sdot(119899) denotesthe 119899th channel estimate Here U(120579 120591) is time-invariant over119873 channel estimates where 119873 is determined based on thestationarity of the AOAs and TOAs for a given multipathscenario The channel estimation rate is determined by thetemporal coherence of the channel path fadingsThe channelshould be estimated once over the coherence time of thechannel path fadings (ie the channel can be estimated onthe order of a frame for a mobile moving at highway speedsand once every 30 frames for a mobile moving at a walkingspeed) After estimating 119873 channels (6) can be representedin matrix form as
Y = U (120579 120591)B + V (7)
where B = [120573(1)
sdot sdot sdot120573(119873)
] and Y and V have similar form A2-dimensional MUSIC algorithm can now be applied to find120591 and 120579 TheMUSIC algorithm will result in a joint delay andangle estimation under the following restrictions
(1) Thenumber ofmultipaths 119902 must be less than119875sdot119871sdot119874(2) Thenumber of channel estimates usedmust be greater
than the number of multipaths(3) The collection timemust be longer than the coherence
time (for fadings) of the mobile channel
A significant consequence of these restrictions is that thenumber of antenna elements needed can be reduced to lessthan the number of multipaths if an adequate number ofsamples are obtained
32 JADE-ESPRIT Algorithm The JADE-ESPRIT algorithmmanipulates the form of the channel estimate matrix so that a2D ESPRIT-like algorithm can be applied First the discreteFourier transform is applied to theH in (5)The pulse shapingfunction is then deconvolved from the Fourier-transformedchannel estimate (see [16] for details) whereby the channelnow satisfies the following model
H = [a (1205951) sdot sdot sdot a (120595
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
f119879 (1206011)
f119879 (120601119902)
]]]]
]
= A (120595) diag [120573] F119879 (120601)
(8)
where 120595119894= exp(minus1198952120587(119889120582) sin(120579
119894)) 120601119894= exp(minus119895(2120587119871)120591
119894)
and a119879(120595119894) = [1120595
1
119894sdot sdot sdot 120595119875minus1
119894] and f(120601
119894) = [1120601
1
119894sdot sdot sdot 120601119871119874minus1
119894]
4 International Journal of Antennas and Propagation
Applying a similar vectorization and stacking operation asin the JADE-MUSIC algorithm the vectorized noisy channelestimate becomes
Y = U (120595120601)B + V (9)
where U(120595120601) = F(120601)∘A(120595) Next a basis of the column spanof U(120595120601) is estimated via the 119902 left singular vectors whichcorrespond to the largest values of covariance matrix RY A2D ESPRIT algorithm is now applied and estimates for 120591 and120579 can be obtained
The restrictions of the JADE-ESPRIT algorithm areslightly stricter than those of the JADE-MUSIC algorithmin addition to the aforementioned JADE-MUSIC restrictionsThe number of multipaths must be less than min(119875(119871119882 minus
1) (119875 minus 1)119871119882) where 119882 is a factor used in the DFT (takenas 1 here)
4 Multipath Characteristic Database Analysis
Remcomrsquos Wireless InSite ray-tracing software was used topopulate the MCD which contains location-based multipathfeature vectors to be used as a basis for a fingerprint matchingalgorithm A grid of transmitters was placed over the areaof interest and then various multipath characteristics of thereceived signal are collected for each transmitter locationFor the analysis here only the AOA (azimuth) and TOAwere considered for utmost simplicity and for minimizingprocessing and time requirements however the multipathfeature vector could be expanded to contain (a) number ofreceived multipaths (b) AOA (azimuth and elevation) ofeach multipath (c) TOA of each multipath (d) receivedsignal strength (RSS) of each multipath (e) delay spreadamongst rays and (f) mean and standard deviation of allaforementioned multipath characteristics Although addingadditional features may doubtlessly increase the locationaccuracy this would entail higher latency owing to excessiveprocessing requirements
A model of downtown State College Pennsylvania wasused in the ray-tracing simulation The model consistedof concrete buildings placed on top of the appropriateelevation (ie landscape) Transmitters were spaced in 35-meter increments along the 119909- and 119910-axes at a height of 2meters (with respect to the ground)The grid covered a 1 km2area and consisted of 81796 transmitters The receiver wasplaced at two different locations represented by Scenario Alocated outside the area of interest and Scenario B locatedwithin the area of interest For Scenario A the receiver wasplaced on top of the Applied Research Laboratory buildingof The Pennsylvania State University at a height of 10 meters(approximately 2 meters above the building height) ForScenario B the receiver was placed on top of the HUB-Robeson Center of The Pennsylvania State University ata height of 12 meters (approximately 2 meters above thebuilding height) Figure 1 shows the 2D representation ofthe Wireless InSite model overlaid on a satellite image ofState College PAThe transmit antennas were dipoles alignedperpendicular to the ground and isotropic antennas wereused in the receiver antenna array
Figure 1 2D representation of theWireless InSitemodel overlaid onsatellite image of State College PA The transmitter grid covers theblue overlay Rx1 corresponds to the receiver location of Scenario Aand Rx2 corresponds to the receiver location of Scenario B copy 2013Google Earth
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
2
4
6
8
10
12
14
16
18
x-location (km)
y-lo
catio
n (k
m)
Figure 2 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario A Data plotted for the dominantmultipath
A 3D ray-tracing model was used in the creation of theMCDThe ray-tracingmodel considered building reflectionsdiffractions and ground interactionsThemodel was capableof analyzing LOS singly diffracted and doubly diffractedpaths The building faces were chosen to be one-sidedwhich only allow for transmission from inside the buildingto outside This choice was made because the number oftransmissions greatly increases the computation time andmultipaths which underwent attenuation through 2 walltransmissions would be significantly weaker than multipathswhich did not undergo wall transmissions The maximumnumber of reflections allowed was 6 and the maximumnumber of diffractions allowed was 2 this allows for raysbetween the receiver and transmitters which are blocked bythe height of a building A simulated GSM signal with centerfrequency 119891
119888 of 191 GHz was used
Figures 2ndash4 display the diversity of the MCD dataobtained via our simulations for Scenario A Figure 2 showsthe TOAof the dominantmultipath for each transmitter loca-tion The TOA generally increases as the distance betweenthe receiver and the transmitters increases Some outliersexist which represent multipaths which underwent multiple
International Journal of Antennas and Propagation 5
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 3 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario A Data plotted for thedominant multipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus180
minus160
minus140
minus120
minus100
minus80
minus60
x-location (km)
y-lo
catio
n (k
m)
Figure 4 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario A Data plotted for thedominant multipath
reflections Figure 3 shows the AOA in the azimuth planefor the dominant multipath of each transmitter The AOA(azimuth) is influenced more by the surrounding environ-ment of each transmitter than the distance between transmit-ter and receiver Figure 4 displays the received power of thedominant multipath for each transmitter location Figure 4shows a strong (negative) correlation between the receivedsignal strength and the distance between the transmitterand receiver as expected The properties for each multipathcharacteristic can be exploited to produce optimal clusteringschemes
Figures 5ndash7 show similar plots for Scenario B Figure 5shows the TOA Figure 6 the AOA and Figure 7 the receivedpower The main differences between these plots and thosefor Scenario A are the increase in the AOA variation overshort distances and the decrease in the spread of TOA valuesSince the transmitter is placed inside the area of interest
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
2
4
6
8
10
x-location (km)
y-lo
catio
n (k
m)
Figure 5 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario B Data plotted for the dominantmultipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 6 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario B Data plotted for thedominant multipath
the dominant multipaths from adjacent transmitters are lesslikely to follow similar paths due to a lower number ofobstructions between the transmitter and receiver This isevident when comparing Figure 3 with Figure 6 wherein theformer contains large areas where the dominant paths (fromneighboring transmitters) arrive from similar directionswhile the latter has greater variation in AOA over shortdistances Scenario A is better suited for our geolocationalgorithm as an error in the AOA estimate may result ina geolocation estimate of a transmitter that is close to theactual transmit location Furthermore the TOA variabilitybetween neighboring transmitters also appears to be lowerfor Scenario A than Scenario B Although it is not alwayspossible Scenario A is preferred
Depending on the size of the area of interest andspatial density of the transmitters the MCD can containan enormous amount of information One way to reduce
6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 3
exponential term in 119904lin of (1) equal to 119911119899Therefore our linear
approximation yields
119904 (119905) asymp 119904lin(119905) =
infin
sum
119899=0
1199111198991198620(119905 minus 119899119879) (4)
where 1198620can be considered to represent the pulse shaping
modulation function of a linear modulation scheme Thisresult is used in JADE techniques presented in subsequentsections
3 Joint Angle Delay Estimation (JADE)
The coherence time of the (Rayleigh) fading in the mobilechannel is roughly given by 119905coh = 119888(V sdot 119891
119888) [14] This yields
a coherence time of 160ms for a mobile moving at a walkingspeed and 56ms for a mobile moving at a highway speedThe fading can therefore be modeled as time-invariant fora single GSM frame at highway speeds and for up to 30frames for walking speeds Subsequently for a transmittermoving at highway speeds or lower the wireless channelhas path fadings that are constant over multiple GSM timeslots An adaptation to the JADE techniques discussed here ispresented in [15] which considers channels with path fadingsvarying within the duration of a time slot The angles anddelays of the received multipaths vary much slower than themobile channel fading therefore we model these as time-invariant over many GSM frames [14]
Vanderveen et al have developed JADE techniques basedon the above assumptions The 119902-multipath channel modelfor a 119875-element antenna array takes the following form (see[14 16] for a complete analysis)
H = [a (1205791) sdot sdot sdot a (120579
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
g119879 (1205911)
g119879 (120591119902)
]]]]
]
= A (120579) diag [120573]G119879 (120591)
(5)
where a(120579119894) is the steering vector of the 119894th multipath and
A(120579) is the 119875 times 119902 steering matrix The diagonal matrixof 120573 values denotes the complex attenuations associatedwith each multipath g(120591
119894) denotes the 119894th delayed pulse
shaping modulation function as shown in (2) and G119879(120591)is a 119902 times 119871119874 matrix containing the 119902 time-delayed pulseshaping functions119871 defines the length of the channel impulseresponse in symbol periods and119874 is the oversampling factor
Unlike GSMrsquos modulation scheme which can be decom-posed into both linear and nonlinear parts the pulse-shapingmodulation function is associated with an entirely linearmodulation scheme The aforementioned linear approxima-tion of the GSM signal was used to accommodate thisrequirement
31 JADE-MUSIC Algorithm Vanderveen et al eventuallyarrive at a vectorized noisy channel estimate of the followingform [16]
vec (H(119899)est ) = y
= [G (120591) ∘ A (120579)]120573(119899)
+ k(119899)
= U (120579 120591)120573(119899)
+ k(119899) 119899 = 1 119873
(6)
where ∘ denotes a column-wise Kronecker product k(119899)
denotes the estimate noise and the superscript sdot(119899) denotesthe 119899th channel estimate Here U(120579 120591) is time-invariant over119873 channel estimates where 119873 is determined based on thestationarity of the AOAs and TOAs for a given multipathscenario The channel estimation rate is determined by thetemporal coherence of the channel path fadingsThe channelshould be estimated once over the coherence time of thechannel path fadings (ie the channel can be estimated onthe order of a frame for a mobile moving at highway speedsand once every 30 frames for a mobile moving at a walkingspeed) After estimating 119873 channels (6) can be representedin matrix form as
Y = U (120579 120591)B + V (7)
where B = [120573(1)
sdot sdot sdot120573(119873)
] and Y and V have similar form A2-dimensional MUSIC algorithm can now be applied to find120591 and 120579 TheMUSIC algorithm will result in a joint delay andangle estimation under the following restrictions
(1) Thenumber ofmultipaths 119902 must be less than119875sdot119871sdot119874(2) Thenumber of channel estimates usedmust be greater
than the number of multipaths(3) The collection timemust be longer than the coherence
time (for fadings) of the mobile channel
A significant consequence of these restrictions is that thenumber of antenna elements needed can be reduced to lessthan the number of multipaths if an adequate number ofsamples are obtained
32 JADE-ESPRIT Algorithm The JADE-ESPRIT algorithmmanipulates the form of the channel estimate matrix so that a2D ESPRIT-like algorithm can be applied First the discreteFourier transform is applied to theH in (5)The pulse shapingfunction is then deconvolved from the Fourier-transformedchannel estimate (see [16] for details) whereby the channelnow satisfies the following model
H = [a (1205951) sdot sdot sdot a (120595
119902)]
[[[
[
1205731
0
d
0 120573119902
]]]
]
[[[[
[
f119879 (1206011)
f119879 (120601119902)
]]]]
]
= A (120595) diag [120573] F119879 (120601)
(8)
where 120595119894= exp(minus1198952120587(119889120582) sin(120579
119894)) 120601119894= exp(minus119895(2120587119871)120591
119894)
and a119879(120595119894) = [1120595
1
119894sdot sdot sdot 120595119875minus1
119894] and f(120601
119894) = [1120601
1
119894sdot sdot sdot 120601119871119874minus1
119894]
4 International Journal of Antennas and Propagation
Applying a similar vectorization and stacking operation asin the JADE-MUSIC algorithm the vectorized noisy channelestimate becomes
Y = U (120595120601)B + V (9)
where U(120595120601) = F(120601)∘A(120595) Next a basis of the column spanof U(120595120601) is estimated via the 119902 left singular vectors whichcorrespond to the largest values of covariance matrix RY A2D ESPRIT algorithm is now applied and estimates for 120591 and120579 can be obtained
The restrictions of the JADE-ESPRIT algorithm areslightly stricter than those of the JADE-MUSIC algorithmin addition to the aforementioned JADE-MUSIC restrictionsThe number of multipaths must be less than min(119875(119871119882 minus
1) (119875 minus 1)119871119882) where 119882 is a factor used in the DFT (takenas 1 here)
4 Multipath Characteristic Database Analysis
Remcomrsquos Wireless InSite ray-tracing software was used topopulate the MCD which contains location-based multipathfeature vectors to be used as a basis for a fingerprint matchingalgorithm A grid of transmitters was placed over the areaof interest and then various multipath characteristics of thereceived signal are collected for each transmitter locationFor the analysis here only the AOA (azimuth) and TOAwere considered for utmost simplicity and for minimizingprocessing and time requirements however the multipathfeature vector could be expanded to contain (a) number ofreceived multipaths (b) AOA (azimuth and elevation) ofeach multipath (c) TOA of each multipath (d) receivedsignal strength (RSS) of each multipath (e) delay spreadamongst rays and (f) mean and standard deviation of allaforementioned multipath characteristics Although addingadditional features may doubtlessly increase the locationaccuracy this would entail higher latency owing to excessiveprocessing requirements
A model of downtown State College Pennsylvania wasused in the ray-tracing simulation The model consistedof concrete buildings placed on top of the appropriateelevation (ie landscape) Transmitters were spaced in 35-meter increments along the 119909- and 119910-axes at a height of 2meters (with respect to the ground)The grid covered a 1 km2area and consisted of 81796 transmitters The receiver wasplaced at two different locations represented by Scenario Alocated outside the area of interest and Scenario B locatedwithin the area of interest For Scenario A the receiver wasplaced on top of the Applied Research Laboratory buildingof The Pennsylvania State University at a height of 10 meters(approximately 2 meters above the building height) ForScenario B the receiver was placed on top of the HUB-Robeson Center of The Pennsylvania State University ata height of 12 meters (approximately 2 meters above thebuilding height) Figure 1 shows the 2D representation ofthe Wireless InSite model overlaid on a satellite image ofState College PAThe transmit antennas were dipoles alignedperpendicular to the ground and isotropic antennas wereused in the receiver antenna array
Figure 1 2D representation of theWireless InSitemodel overlaid onsatellite image of State College PA The transmitter grid covers theblue overlay Rx1 corresponds to the receiver location of Scenario Aand Rx2 corresponds to the receiver location of Scenario B copy 2013Google Earth
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
2
4
6
8
10
12
14
16
18
x-location (km)
y-lo
catio
n (k
m)
Figure 2 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario A Data plotted for the dominantmultipath
A 3D ray-tracing model was used in the creation of theMCDThe ray-tracingmodel considered building reflectionsdiffractions and ground interactionsThemodel was capableof analyzing LOS singly diffracted and doubly diffractedpaths The building faces were chosen to be one-sidedwhich only allow for transmission from inside the buildingto outside This choice was made because the number oftransmissions greatly increases the computation time andmultipaths which underwent attenuation through 2 walltransmissions would be significantly weaker than multipathswhich did not undergo wall transmissions The maximumnumber of reflections allowed was 6 and the maximumnumber of diffractions allowed was 2 this allows for raysbetween the receiver and transmitters which are blocked bythe height of a building A simulated GSM signal with centerfrequency 119891
119888 of 191 GHz was used
Figures 2ndash4 display the diversity of the MCD dataobtained via our simulations for Scenario A Figure 2 showsthe TOAof the dominantmultipath for each transmitter loca-tion The TOA generally increases as the distance betweenthe receiver and the transmitters increases Some outliersexist which represent multipaths which underwent multiple
International Journal of Antennas and Propagation 5
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 3 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario A Data plotted for thedominant multipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus180
minus160
minus140
minus120
minus100
minus80
minus60
x-location (km)
y-lo
catio
n (k
m)
Figure 4 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario A Data plotted for thedominant multipath
reflections Figure 3 shows the AOA in the azimuth planefor the dominant multipath of each transmitter The AOA(azimuth) is influenced more by the surrounding environ-ment of each transmitter than the distance between transmit-ter and receiver Figure 4 displays the received power of thedominant multipath for each transmitter location Figure 4shows a strong (negative) correlation between the receivedsignal strength and the distance between the transmitterand receiver as expected The properties for each multipathcharacteristic can be exploited to produce optimal clusteringschemes
Figures 5ndash7 show similar plots for Scenario B Figure 5shows the TOA Figure 6 the AOA and Figure 7 the receivedpower The main differences between these plots and thosefor Scenario A are the increase in the AOA variation overshort distances and the decrease in the spread of TOA valuesSince the transmitter is placed inside the area of interest
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
2
4
6
8
10
x-location (km)
y-lo
catio
n (k
m)
Figure 5 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario B Data plotted for the dominantmultipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 6 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario B Data plotted for thedominant multipath
the dominant multipaths from adjacent transmitters are lesslikely to follow similar paths due to a lower number ofobstructions between the transmitter and receiver This isevident when comparing Figure 3 with Figure 6 wherein theformer contains large areas where the dominant paths (fromneighboring transmitters) arrive from similar directionswhile the latter has greater variation in AOA over shortdistances Scenario A is better suited for our geolocationalgorithm as an error in the AOA estimate may result ina geolocation estimate of a transmitter that is close to theactual transmit location Furthermore the TOA variabilitybetween neighboring transmitters also appears to be lowerfor Scenario A than Scenario B Although it is not alwayspossible Scenario A is preferred
Depending on the size of the area of interest andspatial density of the transmitters the MCD can containan enormous amount of information One way to reduce
6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Antennas and Propagation
Applying a similar vectorization and stacking operation asin the JADE-MUSIC algorithm the vectorized noisy channelestimate becomes
Y = U (120595120601)B + V (9)
where U(120595120601) = F(120601)∘A(120595) Next a basis of the column spanof U(120595120601) is estimated via the 119902 left singular vectors whichcorrespond to the largest values of covariance matrix RY A2D ESPRIT algorithm is now applied and estimates for 120591 and120579 can be obtained
The restrictions of the JADE-ESPRIT algorithm areslightly stricter than those of the JADE-MUSIC algorithmin addition to the aforementioned JADE-MUSIC restrictionsThe number of multipaths must be less than min(119875(119871119882 minus
1) (119875 minus 1)119871119882) where 119882 is a factor used in the DFT (takenas 1 here)
4 Multipath Characteristic Database Analysis
Remcomrsquos Wireless InSite ray-tracing software was used topopulate the MCD which contains location-based multipathfeature vectors to be used as a basis for a fingerprint matchingalgorithm A grid of transmitters was placed over the areaof interest and then various multipath characteristics of thereceived signal are collected for each transmitter locationFor the analysis here only the AOA (azimuth) and TOAwere considered for utmost simplicity and for minimizingprocessing and time requirements however the multipathfeature vector could be expanded to contain (a) number ofreceived multipaths (b) AOA (azimuth and elevation) ofeach multipath (c) TOA of each multipath (d) receivedsignal strength (RSS) of each multipath (e) delay spreadamongst rays and (f) mean and standard deviation of allaforementioned multipath characteristics Although addingadditional features may doubtlessly increase the locationaccuracy this would entail higher latency owing to excessiveprocessing requirements
A model of downtown State College Pennsylvania wasused in the ray-tracing simulation The model consistedof concrete buildings placed on top of the appropriateelevation (ie landscape) Transmitters were spaced in 35-meter increments along the 119909- and 119910-axes at a height of 2meters (with respect to the ground)The grid covered a 1 km2area and consisted of 81796 transmitters The receiver wasplaced at two different locations represented by Scenario Alocated outside the area of interest and Scenario B locatedwithin the area of interest For Scenario A the receiver wasplaced on top of the Applied Research Laboratory buildingof The Pennsylvania State University at a height of 10 meters(approximately 2 meters above the building height) ForScenario B the receiver was placed on top of the HUB-Robeson Center of The Pennsylvania State University ata height of 12 meters (approximately 2 meters above thebuilding height) Figure 1 shows the 2D representation ofthe Wireless InSite model overlaid on a satellite image ofState College PAThe transmit antennas were dipoles alignedperpendicular to the ground and isotropic antennas wereused in the receiver antenna array
Figure 1 2D representation of theWireless InSitemodel overlaid onsatellite image of State College PA The transmitter grid covers theblue overlay Rx1 corresponds to the receiver location of Scenario Aand Rx2 corresponds to the receiver location of Scenario B copy 2013Google Earth
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
2
4
6
8
10
12
14
16
18
x-location (km)
y-lo
catio
n (k
m)
Figure 2 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario A Data plotted for the dominantmultipath
A 3D ray-tracing model was used in the creation of theMCDThe ray-tracingmodel considered building reflectionsdiffractions and ground interactionsThemodel was capableof analyzing LOS singly diffracted and doubly diffractedpaths The building faces were chosen to be one-sidedwhich only allow for transmission from inside the buildingto outside This choice was made because the number oftransmissions greatly increases the computation time andmultipaths which underwent attenuation through 2 walltransmissions would be significantly weaker than multipathswhich did not undergo wall transmissions The maximumnumber of reflections allowed was 6 and the maximumnumber of diffractions allowed was 2 this allows for raysbetween the receiver and transmitters which are blocked bythe height of a building A simulated GSM signal with centerfrequency 119891
119888 of 191 GHz was used
Figures 2ndash4 display the diversity of the MCD dataobtained via our simulations for Scenario A Figure 2 showsthe TOAof the dominantmultipath for each transmitter loca-tion The TOA generally increases as the distance betweenthe receiver and the transmitters increases Some outliersexist which represent multipaths which underwent multiple
International Journal of Antennas and Propagation 5
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 3 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario A Data plotted for thedominant multipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus180
minus160
minus140
minus120
minus100
minus80
minus60
x-location (km)
y-lo
catio
n (k
m)
Figure 4 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario A Data plotted for thedominant multipath
reflections Figure 3 shows the AOA in the azimuth planefor the dominant multipath of each transmitter The AOA(azimuth) is influenced more by the surrounding environ-ment of each transmitter than the distance between transmit-ter and receiver Figure 4 displays the received power of thedominant multipath for each transmitter location Figure 4shows a strong (negative) correlation between the receivedsignal strength and the distance between the transmitterand receiver as expected The properties for each multipathcharacteristic can be exploited to produce optimal clusteringschemes
Figures 5ndash7 show similar plots for Scenario B Figure 5shows the TOA Figure 6 the AOA and Figure 7 the receivedpower The main differences between these plots and thosefor Scenario A are the increase in the AOA variation overshort distances and the decrease in the spread of TOA valuesSince the transmitter is placed inside the area of interest
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
2
4
6
8
10
x-location (km)
y-lo
catio
n (k
m)
Figure 5 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario B Data plotted for the dominantmultipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 6 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario B Data plotted for thedominant multipath
the dominant multipaths from adjacent transmitters are lesslikely to follow similar paths due to a lower number ofobstructions between the transmitter and receiver This isevident when comparing Figure 3 with Figure 6 wherein theformer contains large areas where the dominant paths (fromneighboring transmitters) arrive from similar directionswhile the latter has greater variation in AOA over shortdistances Scenario A is better suited for our geolocationalgorithm as an error in the AOA estimate may result ina geolocation estimate of a transmitter that is close to theactual transmit location Furthermore the TOA variabilitybetween neighboring transmitters also appears to be lowerfor Scenario A than Scenario B Although it is not alwayspossible Scenario A is preferred
Depending on the size of the area of interest andspatial density of the transmitters the MCD can containan enormous amount of information One way to reduce
6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 5
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 3 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario A Data plotted for thedominant multipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus180
minus160
minus140
minus120
minus100
minus80
minus60
x-location (km)
y-lo
catio
n (k
m)
Figure 4 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario A Data plotted for thedominant multipath
reflections Figure 3 shows the AOA in the azimuth planefor the dominant multipath of each transmitter The AOA(azimuth) is influenced more by the surrounding environ-ment of each transmitter than the distance between transmit-ter and receiver Figure 4 displays the received power of thedominant multipath for each transmitter location Figure 4shows a strong (negative) correlation between the receivedsignal strength and the distance between the transmitterand receiver as expected The properties for each multipathcharacteristic can be exploited to produce optimal clusteringschemes
Figures 5ndash7 show similar plots for Scenario B Figure 5shows the TOA Figure 6 the AOA and Figure 7 the receivedpower The main differences between these plots and thosefor Scenario A are the increase in the AOA variation overshort distances and the decrease in the spread of TOA valuesSince the transmitter is placed inside the area of interest
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
2
4
6
8
10
x-location (km)
y-lo
catio
n (k
m)
Figure 5 Simulated TOA (120583s) data from the MCD for downtownState College PA for Scenario B Data plotted for the dominantmultipath
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
0
50
100
150
200
250
300
350
x-location (km)
y-lo
catio
n (k
m)
Figure 6 Simulated AOA in azimuth plane (∘) data from the MCDfor downtown State College PA for Scenario B Data plotted for thedominant multipath
the dominant multipaths from adjacent transmitters are lesslikely to follow similar paths due to a lower number ofobstructions between the transmitter and receiver This isevident when comparing Figure 3 with Figure 6 wherein theformer contains large areas where the dominant paths (fromneighboring transmitters) arrive from similar directionswhile the latter has greater variation in AOA over shortdistances Scenario A is better suited for our geolocationalgorithm as an error in the AOA estimate may result ina geolocation estimate of a transmitter that is close to theactual transmit location Furthermore the TOA variabilitybetween neighboring transmitters also appears to be lowerfor Scenario A than Scenario B Although it is not alwayspossible Scenario A is preferred
Depending on the size of the area of interest andspatial density of the transmitters the MCD can containan enormous amount of information One way to reduce
6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Antennas and Propagation
0 02 04 06 08 10
01
02
03
04
05
06
07
08
09
1
minus200
minus180
minus160
minus140
minus120
minus100
minus80
x-location (km)
y-lo
catio
n (k
m)
Figure 7 Simulated received power (dBm) data from the MCD fordowntown State College PA for Scenario B Data plotted for thedominant multipath
search redundancy and thus improve the location estimationspeed is to perform a clustering of the MCD Owing to thevariability in each multipath characteristic over the area ofinterest the clustering algorithm should be able to detectclusters of arbitrary shape If the receiver location is knownin advance the application of clustering techniques on theMCD can be performed prior to taking field measurementsAlso clustering schemes may be more useful than others indifferent scenarios For example if an approximate locationprediction is urgently required then a clustering schemecontaining a large amount of data points in each cluster maybe more useful For these reasons a partitioning clusteringalgorithm appears to be a good choice to process the MCDbecause it can provide 1 to119870 (number of data points inMCD)different clustering configurations even though it has thehighest computational complexity among the predominantclustering techniques A more thorough analysis of theclustering of the MCD is given in [17] but it has not beenapplied to the final geolocation algorithm yet
5 Geolocation Algorithm
The method presented here is a fingerprint matching tech-nique in which a comparison between measured multipathfeature vectors and the feature vectors in the referencedatabase is used to determine the best estimate for thelocation of a transmitterThe fingerprinting localization tech-nique can be decomposed into two phases described below[18]
(1) Calibration Measured (or simulated) reference multipathfeature vectors are collected for possible transmit locationswithin the area of interest Each feature vector is stored alongwith its corresponding location
(2) Run-Time The multipath features for a transmitter atan unknown location are estimated via the aforementionedestimation techniques A distance metric is then calculated
between the unknown transmitterrsquos feature vector and thereference feature vectors found in the calibration phase Theminimum values of the distance metric can then be used toprovide estimates for the transmitterrsquos location
Traditionally fingerprinting techniques only consideredRSS features and real-world measurements were taken toconstruct the reference database [19] Such an approach waslimited for use in indoor or in small areas because obtainingthe reference multipath measurements would be impracticalfor a large area Since the method presented here usesray-tracing software to generate its reference database (theMCD) a larger area of operation is possible Furthermoreour method allows for the localization of a mobile emitterfound in a denied territory or other areas where referencemeasurements cannot be obtained
Since the earlier versions of the technique only reliedon RSS multiple stationary access points (or base stations)were needed [18 19] Usually the access points used werepreexisting in a wireless network The RSS from transmitterspositioned in reference locations were collected for eachaccess point A test transmitter then emits from an unknownlocation and the RSS is once again collected for each accesspoint A distance metric is then calculated the minimizationof this metric yields the location estimate
Reference [18] introduced the use of ray-tracing softwareand propagation models to construct the RSS referencedatabase which induced a slight increase in location estimateerrors compared to the same approach with measured RSSreference data This greatly reduced the complexity of thecalibration phase and allowed the technique to be used inlarger areas
References [20 21] implemented fingerprinting tech-niques which consider more multipath characteristics thanthose found in [18 19] By using the channel impulse response(CIR) these techniques essentially utilize all multipath fea-tures except for the phase of the complex attenuation whichvaries greatly over small distances due to small-scale fadingThese techniques are similar to the one presented here exceptthat our technique performs a distance metric on each of theestimated multipath parameters
51 Summary of Implemented Algorithm
Initialize Constants
(i) Set SNR values to implement(ii) Set oversampling rate(iii) Set distance-threshold
Load MCD
(i) Load 4-dimensional MCD(ii) Determine size of MCD dimensions(iii) Determine random location indices based on number
of iterations(iv) Determine weights to normalize TOA and AOA
calculations
International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 7
(a) The weights allow for appropriate comparisonof TOA and AOA distances as their respectivedomains vary over different values
(b) The TOA weight is the maximum TOA in theMCD
(c) The AOA weight is 180∘
For SNR Values
For 119899 Iterations
(i) Select random location of iteration 119899(ii) Extract AOAs and TOAs from 119899th location
(a) if no multipaths exist select another (unused)random location
Ignore Multipaths That Are Too Closely Spaced in the AOATOA Domain
(i) Ignore only one of the pairs that are closely spaced
(a) The distance-threshold is a user-defined param-eter which can be set to determine which multi-paths should be ignored
(b) These could be an artifact of the ray-tracingtechnique which would most likely produce asingle signal
(c) They diminish the performance of the JADE-MUSIC and JADE-ESPRIT algorithms
Create Received Signals Based on Multipath and AntennaArray Parameters
(i) Create antenna array matrix(ii) Create pulse shaping matrix(iii) Create attenuation matrix(iv) Compute channel estimates based on JADE-MUSIC
and JADE-ESPRIT algorithms(v) Add white Gaussian noise with power calculated
based on signal power and current SNR
Perform MUSIC and ESPRIT Algorithms
(i) TheMUSIC and ESPRIT Algorithms are described inSection 3
Calculate the Distance Metric
(i) The distance-metric is described in Section 52
Record Performance Results for Each SNR and Iteration
(i) Determine radius between each estimate and actuallocation
(ii) Record number of ldquohitsrdquo for radii of interest
52 Distance Metric Multiple distance metrics have beenused in fingerprinting localization techniques Each hasadvantages in different multipath scenarios Utilization ofthese metrics is known as instance-based localization asthey do not rely on previous location estimates Intuitivelyone may assume that previous location estimates may aidin the estimation of a transmitter in close proximity to aprevious estimate However Qiu and Kennedy found thatimplementing a Support Vector Machine (SVM) which isnot an instance-based technique but rather a feed-forwardnetwork did not improve location estimation accuracy [21]The reason that implementation of the SVM which is knownfor its aptitude in solving pattern classification problems didnot improve performance is due to the ldquosmall-scalerdquo distribu-tion of multipath characteristics that is the wireless channelimpulse response fluctuates rapidly over short distances
The distance metric used here was 119870-Weighted NearestNeighbors (KWNN) given as [21]
(119909 119910)KWNN =sum119870
119896=1119908119896(119909119896 119910119896)NN
sum119870
119896=1119908119896
(10)
where
(119909119896 119910119896)NN = (Δ
119909119894119896 Δ119910119895119896)
(119894 119895) = min(119894119895)
[
119902
sum
119898=1
119873
sum
119899=1
100381610038161003816100381610038161003816100381610038161003816
f119898119899
minusMCD(119894119895119898119899)
119882119899
100381610038161003816100381610038161003816100381610038161003816
119901
]
1119875
(11)
In the above equations119875 = 2 (ie the Euclidean distance wasmeasured) 119894 and 119895 represent the ldquocoordinatesrdquo of the possibletransmit locations 119902 is the number of multipaths and 119873
is the number of multipath characteristics considered f119898119899
denotes the estimated feature vectorwhich containsAOAandTOA for the analysis presented here MCD
(119894119895119898119899)denotes the
feature vector obtained via the ray-tracing software 119882119899is a
weight given to each multipath characteristic since the rangeof values differs greatly between different multipath charac-teristics a weight is needed to ensure that each characteristicrsquoscontribution to the final location estimate is appropriate119882
119899
is user-defined and can be modified based on the geolocationscenario that is the expected range of values for eachmultipath The weights used to produce the results found inthis paper were 1014 nS for the TOA parameter and 180∘ forthe AOA parameter Δ
119909andΔ
119910denote the spatial resolution
in the 119909- and 119910-directions used when constructing the MCDrespectively The nearest neighbor metric is the special caseof KWNN where 119870 = 1 and 119908
119896= 1 and 119870-nearest
neighbor metric corresponds to 119908119896= 1 Various values of
119870 were used in the subsequent analysis and the 119908119896rsquos which
denote the weights were varied between 1 (NN and KNN)and the inverse of the distance between measuredsimulatedand reference feature vectors (KWNN) The subscripted 119896 in(Δ119909119894119896 Δ119910119895119896) represents the 119896th calculated coordinates if the
119896 minus 1 coordinates were removed from the MCD
8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Antennas and Propagation
Table 1 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 79 91 94 96 32 52 69 824NN 57 80 86 95 19 41 64 828NN 48 76 84 93 15 41 63 8012NN 36 65 78 89 11 29 54 804WNN 63 89 94 96 21 43 67 848WNN 57 86 92 96 21 43 63 8412WNN 49 77 91 96 16 36 60 85
MUSIC ESPRIT
Table 2 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 63 76 80 85 30 51 67 834NN 45 67 72 84 21 43 64 838NN 41 62 72 79 19 38 63 8312NN 28 59 66 74 11 26 55 784WNN 47 73 79 84 22 42 63 858WNN 45 70 78 82 20 40 64 8512WNN 37 63 70 81 16 32 60 84
MUSIC ESPRIT
6 Geolocation Algorithm Analysis
Several different estimation scenarios are shown in thissection followed by statistics of the geolocation algorithmSections 61ndash64 provide insight in the geolocation algorithmrsquosperformance when varying the following attributes SNRreceiver location oversampling rate and number of receiverantennas
61 Effect of SNR Tables 1ndash3 display the number of times alocation estimate was within a certain radius of the actualtransmit location An oversampling rate 2 and 2 uniformlinear arrays (angled 90∘ apart) with 8 antennas (spaced ahalf wavelength apart) were used The number of trials per-formed was 100 We see that the ESPRIT algorithmrsquos overallperformance is worse than that of the MUSIC algorithm thisis expected since the JADE-ESPRIT algorithm has stricterrequirements compared to the JADE-MUSIC algorithmTheresults show that the nearest neighbor estimate performs bestbutKWNNmaybe beneficial in real-world experiments sincethe exact transmitter location may not be included in theMCD and modeling errors may be present
Table 3 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 22 44 55 60 11 29 45 594NN 25 41 50 58 8 22 40 578NN 22 38 46 58 6 19 35 5712NN 14 37 48 54 8 19 35 554WNN 26 42 51 58 8 22 40 588WNN 20 39 48 59 6 21 36 5712WNN 19 37 48 53 8 22 36 57
MUSIC ESPRIT
Table 4 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 30 dB numberof antennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 75 82 83 87 31 42 52 694NN 44 54 63 74 15 28 45 658NN 33 47 54 74 13 27 41 6312NN 17 36 43 62 8 23 36 594WNN 52 64 73 80 16 29 47 678WNN 41 58 71 80 15 27 42 6512WNN 25 50 64 71 9 23 38 61
MUSIC ESPRIT
Overall these results show that the geolocation techniqueis conceptually sound Although a 85 sucess rate (at SNR =15 dB) at a 100-meter radius may not meet the requirementsof practical systems with improvements in the technique areasonable performance level may be achievable
62 Effect of Receiver Location Tables 4ndash6 show resultswith the same simulation parameters as Tables 1ndash3 exceptthe receiver was placed on top of the HUB-Robeson Center(Scenario B) It is apparent that moving the receiver locationinside the area of interest has diminished the performance ofthe geolocation algorithm this is most likely a consequenceof a reduction in spatial coherence in multipath parameterswhen the receiver is placed inside the area of interest TheAOAandTOAare constant over larger areas of transmit loca-tions for Scenario A Therefore an error in AOA and TOAestimation in Scenario A may still allow for a geolocationestimate that is nearby to the actual transmit location Thesuccess rate was 77 (at SNR = 15 dB) at a 100-meter radiusfor Scenario B
63 Effect of Oversampling Rate Table 7 shows the geolo-cation performance when the oversampling rate is set to
International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 9
Table 5 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 60 72 73 77 26 38 47 664NN 33 46 55 67 13 23 35 588NN 27 40 52 66 13 21 36 5712NN 13 31 37 57 6 19 32 554WNN 35 56 60 73 13 24 38 628WNN 31 52 59 71 14 22 37 5912WNN 19 39 51 65 8 21 33 59
MUSIC ESPRIT
Table 6 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 0 dB number ofantennas = 8 oversampling factor = 2 distance-threshold = 02Scenario B
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 16 27 35 43 14 21 27 374NN 11 19 27 35 2 12 17 318NN 10 21 27 38 3 10 17 3312NN 5 13 20 31 2 8 14 284WNN 11 20 27 35 2 12 18 308WNN 10 21 27 40 3 10 18 3312WNN 7 14 22 33 3 8 16 31
MUSIC ESPRIT
Table 7 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 8 oversampling factor = 20 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 71 84 87 90 30 52 71 844NN 56 67 73 79 23 44 62 798NN 48 63 69 78 19 42 61 7312NN 35 53 62 74 14 37 52 704WNN 61 76 81 84 21 46 65 828WNN 58 70 78 84 22 44 65 7712WNN 47 66 73 78 14 42 57 74
MUSIC ESPRIT
20 compared to Table 2 An SNR of 15 dB was used thenumber of antennas in each ULA was 8 and only Scenario Ais considered The geolocation accuracy generally increaseswith an increase in oversampling rate However a 300increase in oversampling rate results only in an increase of
Table 8 Number of ldquohitsrdquo within given radius to actual locationfor each distance metric out of 100 trials SNR = 15 dB number ofantennas = 12 oversampling factor = 2 distance-threshold = 02Scenario A
Radius (meters)10 25 50 100 10 25 50 100
Distance metricNN 68 84 88 90 31 45 73 854NN 54 67 79 83 30 46 64 838NN 46 66 79 83 20 41 63 8112NN 32 53 66 80 13 36 55 744WNN 57 75 83 87 31 45 70 888WNN 56 74 84 87 22 42 62 8512WNN 39 69 79 87 13 39 59 82
MUSIC ESPRIT
126 accuracy at a radius of 10meters forNN-MUSIC and anincrease of 667 accuracy for NN-ESPRIT Thus the smallincrease in estimation accuracy may not justify the increasein computation time for most applications
64 Effect of Number of Antenna Elements in ULA Table 8shows the geolocation performance when the number ofantennas used in each ULA is set to 12 compared to Table 2An SNR of 15 dB was used the oversampling rate usedwas 2 and only Scenario A is considered The geolocationaccuracy generally increased with an increase in the numberof antennas used It is clear that the ESPRIT algorithm ismore affected than the MUSIC algorithm by an increase inthe number of antennas used The MUSIC- and ESPRIT-based geolocation algorithms only increased in accuracy by80 and 33 at a radius of 10 meters when the numberof antennas used in each ULA was increased from 8 to12 respectively Again as stated in Section 63 the slightincrease in performance may not warrant the increase incomputational complexity
65 Analysis of Computation Time Table 9 displays the time(in seconds) required to run the geolocation algorithm as afunction of oversampling factor and the number of antennasused in each ULAThe channel was sampled 30 times and thepath fadings are assumed to be nonstationary over the sampletime The computational complexity of the JADE-MUSICalgorithm is119874((119875sdot119871sdot119874119865)3) for the eigendecomposition of thecovariance matrix plus an additional119874((119875 sdot119871 sdot119874119865)2) for eachpoint in the 2D search (or 3D for AOA in elevation as well)Whereas JADE-ESPRIT has a much lower computationalcomplexity119874((119875sdot119871sdot119874119865)3) at the cost of reduced performance[15] the JADE-MUSIC algorithmrsquos computational complexityis highly dependent on its 2D search For the entirety of theresults presented in this paper a temporal resolution of 2(ie a temporal resolution equal to twice the product of theoversampling rate and bit rate) and an angular resolution of 1∘were used in the JADE-MUSIC search These numbers couldbe reduced to decrease the computation time of the MUSIC-based geolocation algorithm but themultipath characteristicestimations would suffer
10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Antennas and Propagation
Table 9 Number of seconds to compute a geolocation estimate as a function of oversampling rate and number of antennas used in eachULA
Oversampling factor2 10 20
Number of antennas
2 17136 17343 17551 19530
MUSIC4 17155 17506 18743 252906 17260 17512 19945 345658 17580 18208 23434 501092 211 208 242 323
ESPRIT4 212 216 244 3246 213 216 246 3258 213 218 251 331
7 Summary and Further Considerations
A localization scheme that estimates location based on a com-parison between estimated and simulated multipath charac-teristics was proposed The main advantage of our proposedapproach is that it uses only the AOA and TOAdata as inputsthereby reducing the processing overload compared to otherapproaches which use additional data inputs Although theextensive results and conclusions presented here are basedsolely on simulations and relate to a single scenario theyprovide an understanding of the trade-offs and a goodstarting point for future studies It should be emphasized thatconstruction activity or other events that alter the multipathlandscape will necessitate a resurvey of the region andorrecalculation of the entire multipath fingerprint database[4] Furthermore the inclusion of unexpected scatters (iemotor vehicles people animals etc) will need to be analyzedexperimentally to determine the effect on the estimationtechnique and which countermeasures would be appropriatefor such situations
With an SNR of 15 dB the location estimate was withina 25-meter radius of the actual transmit location more than70 of the time in both Scenarios A and B when theoversampling factor was set to 2 and the ULArsquos had 8 antennaelements Increases in the number of antenna elementsand oversampling rate resulted in a slight improvement inperformance which leads the authors to believe that whenthe restrictions in Section 63 are satisfied the estimationtechniquersquos performance is limited by the diversity in mul-tipath parameters amongst each transmit location With theinclusion of more multipath characteristics the location esti-mate should improve thus making this a valuable techniquefor source geolocation estimation When used in outdoorscenarios the location estimation technique presented herehas an advantage over other techniques which only includeRSS comparisons because they are more susceptible to errordue to weather and other changes in the environmentFurthermore only one base station is needed to obtain ageolocation estimate since our technique does not rely onmultilateration
Although 119870-weighted distance metrics performed worsethan the nearest neighbor estimates they have been includedhere for completeness The 119870-weighted approach may be
more beneficial when the algorithm is implemented in real-world experiments and the multipath model is no longerexact The 119870-weighted approach should also be beneficialas the distance between simulated transmitters is reducedA slight estimation error may move the ldquomaxrdquo geolocationestimate to a nearby transmitter and the average of nearestneighbor estimates may yield a better estimate to the actualtransmitter location
Further work with this technique include (but are notlimited to) (a) inclusion of more multipath characteristicsin the MCD (b) utilization of clustering techniques toincrease efficiency (c) development and assessment of otherdistance metrics (d) application of the technique withinother rich-multipath environments and (e) implementationof experimental validation of the simulated results
Conflict of Interests
The authors certify that they do not have a direct financialrelationship with the commercial identitiesmentioned in thispaper that may lead to a conflict of interests for any of theauthors
References
[1] I Y Kelly H Deng and H Ling ldquoOn the feasibility of themultipath fingerprint method for location finding in urbanenvironmentsrdquoApplied Computational Electromagnetics SocietyNewsletter vol 15 no 3 pp 232ndash237 2000
[2] C Nerguizian C Despins and S E E Affes ldquoGeolocation inmines with an impulse response fingerprinting technique andneural networksrdquo IEEE Transactions on Wireless Communica-tions vol 5 no 3 pp 603ndash611 2006
[3] E Kupershtein M Wax and I Cohen ldquoSingle-site emitterlocalization via multipath fingerprintingrdquo IEEE Transactions onSignal Processing vol 61 no 1 pp 10ndash21 2013
[4] J Israelsohn ldquoOn the edge of geolocationrdquo EDN vol 47 no 5pp 35ndash42 2002
[5] M Andreotti M Aquino M Woolfson J Walker and TMoore ldquoSignal propagation analysis and signature extractionfor GNSS indoor positioningrdquo in Proceedings of the IEEEIONPosition Location and Navigation Symposium pp 913ndash919 SanDiego Calif USA April 2006
International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Antennas and Propagation 11
[6] G M R I Godaliyadda and H K Garg ldquoVersatile algorithmsfor accurate indoor geolocationrdquo in Proceedings of the 16thInternational Conference on Digital Signal Processing (DSP rsquo09)pp 1ndash6 Santorini-Hellas Greece July 2009
[7] P Singh and P Sircar ldquoTime delays and angles of arrivalestimation using known signalsrdquo Signal Image and VideoProcessing vol 6 no 2 pp 171ndash178 2012
[8] Third Further Notice of Proposed Rulemaking in the Matter ofWireless E911 Location Accuracy Requirements 2014
[9] B R Phelan EH Lenzing andRMNarayanan ldquoSource local-ization using unique characterizations ofmultipath propagationin an urban environmentrdquo in Proceedings of the IEEE 7th SensorArray and Multichannel Signal Processing Workshop (SAM rsquo12)pp 189ndash192 June 2012
[10] K Murota and K Hirade ldquoGmsk modulation for digital mobileradio telephonyrdquo IEEETransactions onCommunications vol 29no 7 pp 1044ndash1050 1981
[11] P A Laurent ldquoExact and approximate construction of digitalphase modulations by superposition of amplitude modulatedpulsesrdquo IEEE Transactions on Communications vol 34 no 2pp 150ndash160 1986
[12] P Jung ldquoLaurentrsquos representation of binary digital continuousphase modulated signals with modulation index 12 revisitedrdquoIEEE Transactions on Communications vol 42 no 234 pp 221ndash224 1994
[13] AWiesler RMachauer and F Jondral ldquoComparison of GMSKand linear approximated GMSK for use in software radiordquo inProceedings of the IEEE 5th International Symposium on SpreadSpectrum Techniques and Applications pp 557ndash560 Sun CitySouth Africa September 1998
[14] M C Vanderveen A J van der Veen and A Paulraj ldquoEsti-mation of multipath parameters in wireless communicationsrdquoIEEE Transactions on Signal Processing vol 46 no 3 pp 682ndash690 1998
[15] M C Vanderveen Estimation of parametric channel modelsin wireless communication networks [PhD thesis] StanfordUniversity Stanford Calif USA 1997
[16] M C Vanderveen A-J van der Veen and A J Paulraj ldquoJointangle and delay estimation using shift-invariance propertiesrdquoIEEE Signal Processing Letters vol 4 no 5 pp 142ndash145 1997
[17] B R Phelan Location of GSM transmitters in an urban environ-ment via uniquemultipath characterizations [Master thesis]ThePennsylvania State University State College Pa USA 2012
[18] S Cavalieri ldquoWLAN-based outdoor localisation using patternmatching algorithmrdquo International Journal of Wireless Informa-tion Networks vol 14 no 4 pp 265ndash279 2007
[19] M Brunato and C K Kallo ldquoTransparent location fingerprint-ing for wireless servicesrdquo Tech Rep DIT-02-0071 University ofTrento 2002
[20] T Nypan K Gade and O Hallingstad ldquoVehicle positioning bydatabase comparison using the Box-Cox metric and Kalmanfilteringrdquo in Proceedings of the 55th Vehicular Technology Con-ference pp 1650ndash1654 Birmingham Ala USA May 2002
[21] L Qiu and R A Kennedy ldquoRadio location using patternmatch-ing techniques in fixed wireless communication networksrdquo inProceedings of the International Symposium on Communicationsand Information Technologies (ISCIT rsquo07) pp 1054ndash1059 Syd-ney Australia October 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of