Embed Size (px)
Citation preview

Research ArticleSingularity Analysis of Redundant Space Robot withthe Structure of Canadarm2
Gang Chen Long Zhang Qingxuan Jia and Hanxu Sun
School of Automation Beijing University of Posts and Telecommunications Beijing 100876 China
Correspondence should be addressed to Gang Chen buptcggmailcom
Received 1 March 2014 Revised 21 May 2014 Accepted 21 May 2014 Published 26 June 2014
Academic Editor Alessandro Palmeri
Copyright copy 2014 Gang Chen et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A novel method of singularity analysis for redundant space robot with the structure of Canadarm2 is proposed in this paper Thiskind of structure has the characteristics of three consecutive parallel axes First the ldquovirtual manipulatorrdquo method is employedto transfer the singularity problem of a space robot to that of a ground one By choosing an appropriate reference system anda reference point of the end-effector Jacobian matrix is greatly simplified and then it is reconstructed according to a new standardOn this basis the Jacobianmatrix can be partitioned into four submatrixeswhose degradation conditions are put forward thereafterthe singularity conditions and singular directions of the redundant space robot are obtained The effectiveness of the proposedsingularity analysis method is verified through simulation
1 Introduction
Singularity is the inherent characteristic of robots At asingular configuration the end-effector of the robot losesthe ability to move along a certain direction which is calledthe singular direction In this case if there is still a velocitycomponent of the end-effector in singular direction thejoint angular velocities will become unacceptably large andthe end-effector will deviate from its expected trajectoryMoreover it is possible that a robotwill be out of control [1 2]Therefore in order to ensure the stability and reliability ofrobot it is necessary to do the research on singularity analysis
Robot singularity analysis as the basis of singularityavoidance is used to determine the singularity conditionsFor nonredundant robots the determinant value of Jacobianmatrix can directly determine robot singularity conditionsHowever for redundant robots because its Jacobian matrixis not square the singularity analysis becomes much morecomplex Much effort in research community has been paidon dealing with singularity analysis of redundant robotsWhitney [3] determined singularity conditions by calculatingthe determinant value of matrix JJT The pseudoinverse ofJacobian matrix J is given by Jdagger = JT(JJT)minus1 Singular config-urations occur when the determinant value of the JJT portion
of Jdagger is equal to zero Although the matrix formed by JJTis a square matrix the determinant expression could bequite complicated making it very difficult to obtain theanalytical solution Chou et al [4] defined the conceptof null motion differential dynamic system and then thelocal topology and singularity avoidability of redundantrobots are studied according to nonlinear singularity theoryPodhorodeski et al [5] proposed using six-joint subgroupsof Jacobian matrix to determine the singularity conditionsof redundant robots Conditions that cause the determinantvalues of all possible six-joint subgroups to simultaneouslyequal zero are singularity conditions The method workswell but the entire solving process is much complicatedNokleby and Podhorodeski [6 7] used the properties ofreciprocal screws to determine the single-DOF-loss andthe multi-DOF-loss conditions of redundant robots andalso work out the singular directions This method is alsoused in the singularity analysis of Canadian Space Agency(CSA) Canadarm2 [8] The reciprocal method is effectivefor the singularity analysis of all redundant serial manip-ulators However with the increase of DOF its calculationamount is little large For a 7-DOF robot with the struc-ture of the last three axes perpendicular to each otherWaldron et al [9 10] based onmatrix partitioning converted
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 735030 9 pageshttpdxdoiorg1011552014735030
2 Mathematical Problems in Engineering
the segmented 3 times 4 submatrix to a 4 times 4 submatrix withan additional relationship between joint angular velocitiesAnd then the singularity conditions can be achieved throughthe determinant value of square submatrixes Due to theintroduction of an additional relationship the method mayencounter algorithm singular problems Cheng et al [11]suggested decomposing singularities into position singular-ities and orientation singularities by partitioning the 6 times7 JacobianmatrixThismethod only needs to determine eachsingularity condition of the submatrixes including two 3 times4 matrixes one 3 times 3 matrix and one 3 times 3 zero matrix toobtain the singularity conditions It can greatly reduce thecomputation complexity but it can only be applied to thesingularity analysis of the 7-DOF robots with the structureof the last three axes perpendicular to each other
All the singularity analysis methods mentioned aboveare aiming at ground robots or space robots in fixed-basemode For free-floating or free-flying space robots somescholars utilized the method in [2] only replacing theJacobian matrix J by J119892 in Jdagger = JT(JJT)minus1 here J119892 is calledthe generalized Jacobian matrix Similarly it is very difficultto obtain the analytical solution Xu et al [12] presented asingularity separationmethodwhich separates the singularityparameters from the inverse of the Jacobian to simplify theanalysis However sometimes the parameters separation ishard Nenchev et al [13] utilized the singular-value decom-position (SVD) of the Jacobian matrix to judge whether thesingularity happens and it is really effective for numericalcomputation not for analytical solution
A novel method of singularity analysis for redundantspace robots with the structure of Canadarm2 is proposedin this paper First the ldquovirtual manipulatorrdquo method isemployed to transfer the singularity problem of a spacerobot to that of a ground one Second Jacobian matrix isreconstructed according to a new standard on the basis ofsimplification Thereafter the Jacobian matrix can be parti-tioned into four submatrixes whose degradation conditionsare put forward Finally the singularity conditions and sin-gular directions of redundant space robots with the structureof Canadarm2 are obtained
This paper is organized as follows Section 1 gives a briefoverview of the research on singularity analysis Section 2employs the ldquovirtual manipulatorrdquo method to transfer thesingularity problem of a space robot to that of a groundone The Jacobian matrix is simplified and the equivalence ofsingularity is analyzed in detail in Section 3 Section 4 obtainsthe singularity conditions and singular directions Section 5 isa simulation example and Section 6 concludes the paper
2 Virtual Manipulator
For a free-floating space robot as shown in Figure 1 thelinear momentum of the system is conserved which is theholonomic constraint According to ldquovirtual manipulatorrdquoconcept proposed in [14 15] the kinematic problem in thismode can be simplified to that belonging to a ground robotBy this concept the base of free-floating manipulator isregarded as a rod linked to the virtual ground by a passive
sphere joint The relationship between system mass centerand the each linkrsquos mass center is as follows (without specialinstruction all variables are expressed in inertial frame)
119872119903119892 =
119899
sum
119894=0
119898119894119903119894 (1)
And the basersquos mass center is
1199030 = 119903119892 minus
(1198981 + sdot sdot sdot + 119898119899) (1198870 + 1198861)
119872
minus sdot sdot sdot minus
119898119899 (119887119899minus1 + 119886119899)
119872
(2)
The position of the end-effector is
119901119890 = 119903119892 +1198870 +
119899
sum
119894=1
(119886119894 +119887119894) (3)
where 119886119894 = ((sum
119894
119896=0119898119896)119872)119886119894 119887119894 = ((sum
119894
119896=0119898119896)119872)119887119894 119894 =
1 119899 Vectors 119886119894 and 119887119894 are called ldquovirtual link vectorsrdquowhich are parallel to vectors 119886119894 and 119887119894 respectively
Differentiating two sides of (3) (4) can be obtained asfollows
V119890 = V119892 +1198870 +
119899
sum
119894=1
(119894 +
119887119894) (4)
where V119892 represents the linear velocity of the systemrsquos masscenter Assuming that the initial momentum is zero V119892 =0 can be obtained due to the holonomic constraintMoreover
119894 =
119889 (119886119894)
119889119905
=
119889 (A119894119894119886
119894)
119889119905
=
119889 (A119894)119889119905
(
119894119886
119894)
= (120596119894 times A119894) (119894119886
119894) = 120596119894 times 119886119894
(5)
In the same way
119887119894 = 120596119894 times
119887119894
(6)
where A119894 is the rotation matrix from frame 119894 to the inertialframe and 120596119894 is the angular velocity of 119894th body and combin-ing (4) (5) and (6)
V119890 = 1205960 times 1198870 +119899
sum
119894=1
120596119894 times (119886119894 +119887119894) (7)
Meanwhile the angular velocity of link 119894 is
120596119894 = 1205960 +
119894
sum
119896=1
119896119896120579119896 (8)
Substituting (8) into (7)
V119890 = minusp1198921198901205960 +119899
sum
119896=1
[119896119896 times (119901119890 minus 119901119896)]120579119896 (9)
where p119892119890 is the antisymmetric matrix of vector (119901119890 minus 119903119892)
Mathematical Problems in Engineering 3
Mass center
J1b0
r0
perg
Cn
ΣI
Σ0
Σ1
C1a1
C2
b1
J2
rkpk
Jk
b2
a2
middot middot middot middot middot middot
Σ2
Σn
ΣE
bn
an
Σk
Jn
bkCk
ak
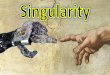
Figure 1 A general model of free-floating space robot Σ119868 Σ119864 the inertia frame and the end-effector frame respectively Σ119894 (119894 = 1 119899)the frame of link 119894 119862119894 (119894 = 1 119899) the mass center position of link 119894 119869119894 (119894 = 1 119899) the position of joint 119894 119886119894 119887119894 (119894 = 1 119899) the positionvectors from 119869119894 to 119862119894 and 119862119894 to 119869119894+1 respectively 119903119894 (119894 = 1 119899) the position vector of 119862119894 119903119892 the position vector of the systemrsquos mass center119901119894 (119894 = 1 119899) the position vector of 119869119894 119901119890 the position vector of the end-effector Θ the joint angle vector 119898119894 (119894 = 1 119899) the mass oflink 119894119872 the total mass of the system E3 3 times 3 identity matrix
Combining (8) and (9) the following relationship can beobtained
[
V119890120596119890
] =J1198871205960 + J119898 Θ (10)
where
J119887 = [minusp119892119890E3] isin R6times3
J119898 = [1199111 times (119901119890 minus 1199011) sdot sdot sdot 119911119899 times (119901119890 minus 119901119899)
1199111 sdot sdot sdot 119911119899
] isin R6times119899
(11)
and 119911119894 is the unit vector of 119911-axis of coordinate system 119894When a space robot is in free-flying mode its attitude is
kept unchanged namely 1205960 = [0 0 0]T thus
[
V119890120596119890
] =J119898 Θ (12)
Thereby the singularity analysis of a free-flying spacerobot is only related to J119898 which only contains the virtuallink parameters
When a space robot is in free-floating manipulator thebase angular velocity can be measured by its carried sensornamely 1205960 is a known term so
[
V119890120596119890
] minusJ1198871205960 = J119898 Θ (13)
[
V119890119890
] =J119898 Θ (14)
where [ V119890
119890
] = [
V119890
120596119890
] minusJ1198871205960
In the same way the singularity analysis of a free-floatingspace robot is also only related to J119898 which only contains thevirtual link parameters
According to the derivation above it can be found that thesingularity problem of space robots can be transferred to thatof a ground one through the ldquovirtual manipulatorrdquo method
3 Simplifying the Jacobian Matrix
For a 7-dof space robot with the structure of Canadarm2its axis 3 axis 4 and axis 5 are parallel to each other Link-pole coordinate system based on the method of Denavit-Hartenberg is established in Figure 2 The relevant parame-ters of the space robotic system are given in Table 1 and thecorresponding parameters of virtual manipulator are shownin Table 2
4 Mathematical Problems in Engineering
d ea
c
f
h
k
l X0
Z0
Z2Z3
Z4Z1
X1
X2 X3
X5
X7
X6
Y7
Z7
Z5
Z6
X4
Y3
Figure 2 DH coordinate system of the studied robot
Table 1 The relevant parameters of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
119887119894m 119897 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
Table 2 The corresponding parameters of virtual manipulator of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
119887119894m
1198980119897
119872
(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
The Jacobian matrix of the studied robot is very com-plicated in inertial coordinate system making it verytough to analyze the singularity characteristics using matrixJ119898 directly therefore it is necessary to simplify the analyticalform of J119898 Usually the Jacobian matrix can be simplifiedgreatly by choosing an appropriate reference system anda proper reference point of the end-effector [8 10] For
the robot configuration studied in this paper the fifthjoint coordinate system Σ4 in Figure 2 is chosen as thereference system Σref and select the intersection formed bythe enlarged end-effector and the origin of Σref as the end-effector reference point And the simplified Jacobian matrixcan be obtained as follows
Jrefref =
[
[
[
[
[
[
[
[
[
[
[
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 1198901198785 +
11988911987845 1198901198785 0 0 minus
ℎ1198626
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 1198901198625 +
11988911986245 1198901198625 0 0 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 0 0 0 0 minus
ℎ1198786
1198623451198782 minus119878345 0 0 0 0 minus1198786
minus1198782119878345 minus119862345 0 0 0 minus1 0
1198622 0 1 1 1 0 1198626
]
]
]
]
]
]
]
]
]
]
]
(15)
Mathematical Problems in Engineering 5
where 119862119894 119878119894 119862119894119895 119878119894119895 119862119894119895119896 and 119878119894119895119896 represent Cos(120579119894) Sin(120579119894)Cos(120579119894 + 120579119895) Sin(120579119894 + 120579119895)Cos(120579119894 + 120579119895 + 120579119896) andSin(120579119894 + 120579119895 + 120579119896) respectively 119886 = ((1198980 + 1198981)119886)119872 119888 =(sum
2
119896=0119898119896119888)119872 119889 = (sum3
119896=0119898119896119889)119872 119890 = (sum4
119896=0119898119896119890)119872 119891 =
(sum
5
119896=0119898119896119891)119872 ℎ = (sum
6
119896=0119898119896ℎ)119872 and 119896 = (sum
7
119896=0119898119896119896)
119872In the following the singular consistency between
Jrefref and J119898 is proved in detail With respect to the referenceframe the actual end point vector 119901ref
119890and the end reference
point vector 119901refref have the following relationship (superscriptldquoref rdquo means vectors described in reference system)
119901
ref119890= 119901
refref + 119901
ref119890ref (16)
where 119901ref119890ref
is the vector from the end reference point to theactual end point
On this basis the relationship between the end referencepoint velocity Vrefref and actual end point velocity Vref
119890can be
expressed as
Vref119890= Vrefref + 120596
refref times 119901
ref119890ref= Vrefref minus p
ref119890refsdot 120596
refref (17)
where 120596refref is the angular velocity of the end reference point
Since the end reference point and the actual end pointattach to the same rigid body their angular velocities are thesame
120596
refref = 120596
ref119890 (18)
Combining (17) with (18) the actual end point velocity is
ref119890= [
Vref119890
120596
ref119890
] = [
E3 minuspref119890refO3 E3
][
Vrefref120596
refref] = Jref119890refsdot
refref (19)
Combining (12) with (19) the relationship between theoriginal Jacobian matrix J119898 and the simplified Jacobianmatrix Jrefref can be represented as
J119898 = Jref sdot Jref119898= Jref sdot J
ref119890refsdot119869
refref (20)
where Jref = [
Rref O3
O3Rref] Rref is the rotation matrix from
Σref to Σ119868 and Jref119898 is the Jacobian matrix expressed in ref-erence system Because both the determinant values of Jrefand Jref119890ref
are 1 the singularity of J119898 is equivalent to that ofJrefref The simplification will provide the foundation for robotsingularity analysis in the following section
4 Singularity Analysis
On the basis of the Jacobian matrix simplification it can befound that a 3 times 3 zero matrix exists in Jrefref The zero matrixresulted from the structure with three consecutive parallelaxes
41 The Characteristics of the Structure of Canadarm2 Forthe structure of Canadarm2 which has three consecutive
parallel axes the orientations of the joint coordinate axes cor-responding to three consecutive parallel axes are consistentWithout any loss of generality take the structure of axis 3axis 4 and axis 5 parallel to each other as an example theorientations of coordinate axes 1199112 1199113 and 1199114 are the sameas shown in Figure 2 Since reference system Σref and jointcoordinate system Σ4 coincide with each other the vector ofaxes 1199112 1199113 and 1199114 can be represented as 0 0 1T in ΣrefGenerally speaking the first three rows of Jrefref are calledlinear velocity Jacobian matrix and the last three rowsare called angular velocity Jacobian matrix Thereforethe angular velocity Jacobian submatrix corresponding tothe three consecutive parallel axes can be obtained asfollows
J120596345=[
[
0 0 0
0 0 0
1 1 1
]
]
(21)
As for the linear velocity Jacobian submatrix correspond-ing to the three consecutive parallel axes vector (119901119890 minus 119901119894) in(10) needs to be replaced by (119901refref minus 119901
ref119894) Both the vectors
(119901
refref minus 119901
ref2) (119901
refref minus 119901
ref3) are in the 119883119874119884 plane of Σref so
there are no components in 119911-axis direction Then assumethat (119901refref minus 119901
ref2) = 119886119909 119886119910 0
T (119901refref minus 119901ref3) = 119887119909 119887119910 0
T and(119901
refref minus 119901
ref4) = 0 0 0
T are obvious Meanwhile consideringthe expression 119911ref
2= 119911
ref3= 119911
ref4= 0 0 1
T the linear velocityJacobian submatrix corresponding to the three consecutiveparallel axes is as follows
JV345=[
[
minus119886119910 minus119887119910 0
119886119909 119887119909 0
0 0 0
]
]
(22)
Thus by merging (21) (22) and (23) can be constructed
J345 =[
[
[
minus119886119910 119886119909
minus119887119910 119887119909
0 0
0 0 0
0 0 0
0 0 0
1
1
1
]
]
]
T
(23)
Through the derivation above it can safely draw theconclusion that a 3 times 3 zero matrix exists in the simpli-fied Jacobian matrix of any robot with the structure ofCanadarm2
42 The Reconstruction of Jacobian Matrix The charac-teristics of the structure of Canadarm2 can be used tosimplify the singularity analysis In order to decomposethe Jacobian matrix to simplify the singularity analysismatrix Jrefref is reconstructed according to a novel stan-dard whose basic idea is to put the 3 times 3 zero matrixin the corner And the new Jacobian matrix is shown asfollows
6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
the segmented 3 times 4 submatrix to a 4 times 4 submatrix withan additional relationship between joint angular velocitiesAnd then the singularity conditions can be achieved throughthe determinant value of square submatrixes Due to theintroduction of an additional relationship the method mayencounter algorithm singular problems Cheng et al [11]suggested decomposing singularities into position singular-ities and orientation singularities by partitioning the 6 times7 JacobianmatrixThismethod only needs to determine eachsingularity condition of the submatrixes including two 3 times4 matrixes one 3 times 3 matrix and one 3 times 3 zero matrix toobtain the singularity conditions It can greatly reduce thecomputation complexity but it can only be applied to thesingularity analysis of the 7-DOF robots with the structureof the last three axes perpendicular to each other
All the singularity analysis methods mentioned aboveare aiming at ground robots or space robots in fixed-basemode For free-floating or free-flying space robots somescholars utilized the method in [2] only replacing theJacobian matrix J by J119892 in Jdagger = JT(JJT)minus1 here J119892 is calledthe generalized Jacobian matrix Similarly it is very difficultto obtain the analytical solution Xu et al [12] presented asingularity separationmethodwhich separates the singularityparameters from the inverse of the Jacobian to simplify theanalysis However sometimes the parameters separation ishard Nenchev et al [13] utilized the singular-value decom-position (SVD) of the Jacobian matrix to judge whether thesingularity happens and it is really effective for numericalcomputation not for analytical solution
A novel method of singularity analysis for redundantspace robots with the structure of Canadarm2 is proposedin this paper First the ldquovirtual manipulatorrdquo method isemployed to transfer the singularity problem of a spacerobot to that of a ground one Second Jacobian matrix isreconstructed according to a new standard on the basis ofsimplification Thereafter the Jacobian matrix can be parti-tioned into four submatrixes whose degradation conditionsare put forward Finally the singularity conditions and sin-gular directions of redundant space robots with the structureof Canadarm2 are obtained
This paper is organized as follows Section 1 gives a briefoverview of the research on singularity analysis Section 2employs the ldquovirtual manipulatorrdquo method to transfer thesingularity problem of a space robot to that of a groundone The Jacobian matrix is simplified and the equivalence ofsingularity is analyzed in detail in Section 3 Section 4 obtainsthe singularity conditions and singular directions Section 5 isa simulation example and Section 6 concludes the paper
2 Virtual Manipulator
For a free-floating space robot as shown in Figure 1 thelinear momentum of the system is conserved which is theholonomic constraint According to ldquovirtual manipulatorrdquoconcept proposed in [14 15] the kinematic problem in thismode can be simplified to that belonging to a ground robotBy this concept the base of free-floating manipulator isregarded as a rod linked to the virtual ground by a passive
sphere joint The relationship between system mass centerand the each linkrsquos mass center is as follows (without specialinstruction all variables are expressed in inertial frame)
119872119903119892 =
119899
sum
119894=0
119898119894119903119894 (1)
And the basersquos mass center is
1199030 = 119903119892 minus
(1198981 + sdot sdot sdot + 119898119899) (1198870 + 1198861)
119872
minus sdot sdot sdot minus
119898119899 (119887119899minus1 + 119886119899)
119872
(2)
The position of the end-effector is
119901119890 = 119903119892 +1198870 +
119899
sum
119894=1
(119886119894 +119887119894) (3)
where 119886119894 = ((sum
119894
119896=0119898119896)119872)119886119894 119887119894 = ((sum
119894
119896=0119898119896)119872)119887119894 119894 =
1 119899 Vectors 119886119894 and 119887119894 are called ldquovirtual link vectorsrdquowhich are parallel to vectors 119886119894 and 119887119894 respectively
Differentiating two sides of (3) (4) can be obtained asfollows
V119890 = V119892 +1198870 +
119899
sum
119894=1
(119894 +
119887119894) (4)
where V119892 represents the linear velocity of the systemrsquos masscenter Assuming that the initial momentum is zero V119892 =0 can be obtained due to the holonomic constraintMoreover
119894 =
119889 (119886119894)
119889119905
=
119889 (A119894119894119886
119894)
119889119905
=
119889 (A119894)119889119905
(
119894119886
119894)
= (120596119894 times A119894) (119894119886
119894) = 120596119894 times 119886119894
(5)
In the same way
119887119894 = 120596119894 times
119887119894
(6)
where A119894 is the rotation matrix from frame 119894 to the inertialframe and 120596119894 is the angular velocity of 119894th body and combin-ing (4) (5) and (6)
V119890 = 1205960 times 1198870 +119899
sum
119894=1
120596119894 times (119886119894 +119887119894) (7)
Meanwhile the angular velocity of link 119894 is
120596119894 = 1205960 +
119894
sum
119896=1
119896119896120579119896 (8)
Substituting (8) into (7)
V119890 = minusp1198921198901205960 +119899
sum
119896=1
[119896119896 times (119901119890 minus 119901119896)]120579119896 (9)
where p119892119890 is the antisymmetric matrix of vector (119901119890 minus 119903119892)
Mathematical Problems in Engineering 3
Mass center
J1b0
r0
perg
Cn
ΣI
Σ0
Σ1
C1a1
C2
b1
J2
rkpk
Jk
b2
a2
middot middot middot middot middot middot
Σ2
Σn
ΣE
bn
an
Σk
Jn
bkCk
ak
Figure 1 A general model of free-floating space robot Σ119868 Σ119864 the inertia frame and the end-effector frame respectively Σ119894 (119894 = 1 119899)the frame of link 119894 119862119894 (119894 = 1 119899) the mass center position of link 119894 119869119894 (119894 = 1 119899) the position of joint 119894 119886119894 119887119894 (119894 = 1 119899) the positionvectors from 119869119894 to 119862119894 and 119862119894 to 119869119894+1 respectively 119903119894 (119894 = 1 119899) the position vector of 119862119894 119903119892 the position vector of the systemrsquos mass center119901119894 (119894 = 1 119899) the position vector of 119869119894 119901119890 the position vector of the end-effector Θ the joint angle vector 119898119894 (119894 = 1 119899) the mass oflink 119894119872 the total mass of the system E3 3 times 3 identity matrix
Combining (8) and (9) the following relationship can beobtained
[
V119890120596119890
] =J1198871205960 + J119898 Θ (10)
where
J119887 = [minusp119892119890E3] isin R6times3
J119898 = [1199111 times (119901119890 minus 1199011) sdot sdot sdot 119911119899 times (119901119890 minus 119901119899)
1199111 sdot sdot sdot 119911119899
] isin R6times119899
(11)
and 119911119894 is the unit vector of 119911-axis of coordinate system 119894When a space robot is in free-flying mode its attitude is
kept unchanged namely 1205960 = [0 0 0]T thus
[
V119890120596119890
] =J119898 Θ (12)
Thereby the singularity analysis of a free-flying spacerobot is only related to J119898 which only contains the virtuallink parameters
When a space robot is in free-floating manipulator thebase angular velocity can be measured by its carried sensornamely 1205960 is a known term so
[
V119890120596119890
] minusJ1198871205960 = J119898 Θ (13)
[
V119890119890
] =J119898 Θ (14)
where [ V119890
119890
] = [
V119890
120596119890
] minusJ1198871205960
In the same way the singularity analysis of a free-floatingspace robot is also only related to J119898 which only contains thevirtual link parameters
According to the derivation above it can be found that thesingularity problem of space robots can be transferred to thatof a ground one through the ldquovirtual manipulatorrdquo method
3 Simplifying the Jacobian Matrix
For a 7-dof space robot with the structure of Canadarm2its axis 3 axis 4 and axis 5 are parallel to each other Link-pole coordinate system based on the method of Denavit-Hartenberg is established in Figure 2 The relevant parame-ters of the space robotic system are given in Table 1 and thecorresponding parameters of virtual manipulator are shownin Table 2
4 Mathematical Problems in Engineering
d ea
c
f
h
k
l X0
Z0
Z2Z3
Z4Z1
X1
X2 X3
X5
X7
X6
Y7
Z7
Z5
Z6
X4
Y3
Figure 2 DH coordinate system of the studied robot
Table 1 The relevant parameters of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
119887119894m 119897 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
Table 2 The corresponding parameters of virtual manipulator of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
119887119894m
1198980119897
119872
(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
The Jacobian matrix of the studied robot is very com-plicated in inertial coordinate system making it verytough to analyze the singularity characteristics using matrixJ119898 directly therefore it is necessary to simplify the analyticalform of J119898 Usually the Jacobian matrix can be simplifiedgreatly by choosing an appropriate reference system anda proper reference point of the end-effector [8 10] For
the robot configuration studied in this paper the fifthjoint coordinate system Σ4 in Figure 2 is chosen as thereference system Σref and select the intersection formed bythe enlarged end-effector and the origin of Σref as the end-effector reference point And the simplified Jacobian matrixcan be obtained as follows
Jrefref =
[
[
[
[
[
[
[
[
[
[
[
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 1198901198785 +
11988911987845 1198901198785 0 0 minus
ℎ1198626
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 1198901198625 +
11988911986245 1198901198625 0 0 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 0 0 0 0 minus
ℎ1198786
1198623451198782 minus119878345 0 0 0 0 minus1198786
minus1198782119878345 minus119862345 0 0 0 minus1 0
1198622 0 1 1 1 0 1198626
]
]
]
]
]
]
]
]
]
]
]
(15)
Mathematical Problems in Engineering 5
where 119862119894 119878119894 119862119894119895 119878119894119895 119862119894119895119896 and 119878119894119895119896 represent Cos(120579119894) Sin(120579119894)Cos(120579119894 + 120579119895) Sin(120579119894 + 120579119895)Cos(120579119894 + 120579119895 + 120579119896) andSin(120579119894 + 120579119895 + 120579119896) respectively 119886 = ((1198980 + 1198981)119886)119872 119888 =(sum
2
119896=0119898119896119888)119872 119889 = (sum3
119896=0119898119896119889)119872 119890 = (sum4
119896=0119898119896119890)119872 119891 =
(sum
5
119896=0119898119896119891)119872 ℎ = (sum
6
119896=0119898119896ℎ)119872 and 119896 = (sum
7
119896=0119898119896119896)
119872In the following the singular consistency between
Jrefref and J119898 is proved in detail With respect to the referenceframe the actual end point vector 119901ref
119890and the end reference
point vector 119901refref have the following relationship (superscriptldquoref rdquo means vectors described in reference system)
119901
ref119890= 119901
refref + 119901
ref119890ref (16)
where 119901ref119890ref
is the vector from the end reference point to theactual end point
On this basis the relationship between the end referencepoint velocity Vrefref and actual end point velocity Vref
119890can be
expressed as
Vref119890= Vrefref + 120596
refref times 119901
ref119890ref= Vrefref minus p
ref119890refsdot 120596
refref (17)
where 120596refref is the angular velocity of the end reference point
Since the end reference point and the actual end pointattach to the same rigid body their angular velocities are thesame
120596
refref = 120596
ref119890 (18)
Combining (17) with (18) the actual end point velocity is
ref119890= [
Vref119890
120596
ref119890
] = [
E3 minuspref119890refO3 E3
][
Vrefref120596
refref] = Jref119890refsdot
refref (19)
Combining (12) with (19) the relationship between theoriginal Jacobian matrix J119898 and the simplified Jacobianmatrix Jrefref can be represented as
J119898 = Jref sdot Jref119898= Jref sdot J
ref119890refsdot119869
refref (20)
where Jref = [
Rref O3
O3Rref] Rref is the rotation matrix from
Σref to Σ119868 and Jref119898 is the Jacobian matrix expressed in ref-erence system Because both the determinant values of Jrefand Jref119890ref
are 1 the singularity of J119898 is equivalent to that ofJrefref The simplification will provide the foundation for robotsingularity analysis in the following section
4 Singularity Analysis
On the basis of the Jacobian matrix simplification it can befound that a 3 times 3 zero matrix exists in Jrefref The zero matrixresulted from the structure with three consecutive parallelaxes
41 The Characteristics of the Structure of Canadarm2 Forthe structure of Canadarm2 which has three consecutive
parallel axes the orientations of the joint coordinate axes cor-responding to three consecutive parallel axes are consistentWithout any loss of generality take the structure of axis 3axis 4 and axis 5 parallel to each other as an example theorientations of coordinate axes 1199112 1199113 and 1199114 are the sameas shown in Figure 2 Since reference system Σref and jointcoordinate system Σ4 coincide with each other the vector ofaxes 1199112 1199113 and 1199114 can be represented as 0 0 1T in ΣrefGenerally speaking the first three rows of Jrefref are calledlinear velocity Jacobian matrix and the last three rowsare called angular velocity Jacobian matrix Thereforethe angular velocity Jacobian submatrix corresponding tothe three consecutive parallel axes can be obtained asfollows
J120596345=[
[
0 0 0
0 0 0
1 1 1
]
]
(21)
As for the linear velocity Jacobian submatrix correspond-ing to the three consecutive parallel axes vector (119901119890 minus 119901119894) in(10) needs to be replaced by (119901refref minus 119901
ref119894) Both the vectors
(119901
refref minus 119901
ref2) (119901
refref minus 119901
ref3) are in the 119883119874119884 plane of Σref so
there are no components in 119911-axis direction Then assumethat (119901refref minus 119901
ref2) = 119886119909 119886119910 0
T (119901refref minus 119901ref3) = 119887119909 119887119910 0
T and(119901
refref minus 119901
ref4) = 0 0 0
T are obvious Meanwhile consideringthe expression 119911ref
2= 119911
ref3= 119911
ref4= 0 0 1
T the linear velocityJacobian submatrix corresponding to the three consecutiveparallel axes is as follows
JV345=[
[
minus119886119910 minus119887119910 0
119886119909 119887119909 0
0 0 0
]
]
(22)
Thus by merging (21) (22) and (23) can be constructed
J345 =[
[
[
minus119886119910 119886119909
minus119887119910 119887119909
0 0
0 0 0
0 0 0
0 0 0
1
1
1
]
]
]
T
(23)
Through the derivation above it can safely draw theconclusion that a 3 times 3 zero matrix exists in the simpli-fied Jacobian matrix of any robot with the structure ofCanadarm2
42 The Reconstruction of Jacobian Matrix The charac-teristics of the structure of Canadarm2 can be used tosimplify the singularity analysis In order to decomposethe Jacobian matrix to simplify the singularity analysismatrix Jrefref is reconstructed according to a novel stan-dard whose basic idea is to put the 3 times 3 zero matrixin the corner And the new Jacobian matrix is shown asfollows
6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Mass center
J1b0
r0
perg
Cn
ΣI
Σ0
Σ1
C1a1
C2
b1
J2
rkpk
Jk
b2
a2
middot middot middot middot middot middot
Σ2
Σn
ΣE
bn
an
Σk
Jn
bkCk
ak
Figure 1 A general model of free-floating space robot Σ119868 Σ119864 the inertia frame and the end-effector frame respectively Σ119894 (119894 = 1 119899)the frame of link 119894 119862119894 (119894 = 1 119899) the mass center position of link 119894 119869119894 (119894 = 1 119899) the position of joint 119894 119886119894 119887119894 (119894 = 1 119899) the positionvectors from 119869119894 to 119862119894 and 119862119894 to 119869119894+1 respectively 119903119894 (119894 = 1 119899) the position vector of 119862119894 119903119892 the position vector of the systemrsquos mass center119901119894 (119894 = 1 119899) the position vector of 119869119894 119901119890 the position vector of the end-effector Θ the joint angle vector 119898119894 (119894 = 1 119899) the mass oflink 119894119872 the total mass of the system E3 3 times 3 identity matrix
Combining (8) and (9) the following relationship can beobtained
[
V119890120596119890
] =J1198871205960 + J119898 Θ (10)
where
J119887 = [minusp119892119890E3] isin R6times3
J119898 = [1199111 times (119901119890 minus 1199011) sdot sdot sdot 119911119899 times (119901119890 minus 119901119899)
1199111 sdot sdot sdot 119911119899
] isin R6times119899
(11)
and 119911119894 is the unit vector of 119911-axis of coordinate system 119894When a space robot is in free-flying mode its attitude is
kept unchanged namely 1205960 = [0 0 0]T thus
[
V119890120596119890
] =J119898 Θ (12)
Thereby the singularity analysis of a free-flying spacerobot is only related to J119898 which only contains the virtuallink parameters
When a space robot is in free-floating manipulator thebase angular velocity can be measured by its carried sensornamely 1205960 is a known term so
[
V119890120596119890
] minusJ1198871205960 = J119898 Θ (13)
[
V119890119890
] =J119898 Θ (14)
where [ V119890
119890
] = [
V119890
120596119890
] minusJ1198871205960
In the same way the singularity analysis of a free-floatingspace robot is also only related to J119898 which only contains thevirtual link parameters
According to the derivation above it can be found that thesingularity problem of space robots can be transferred to thatof a ground one through the ldquovirtual manipulatorrdquo method
3 Simplifying the Jacobian Matrix
For a 7-dof space robot with the structure of Canadarm2its axis 3 axis 4 and axis 5 are parallel to each other Link-pole coordinate system based on the method of Denavit-Hartenberg is established in Figure 2 The relevant parame-ters of the space robotic system are given in Table 1 and thecorresponding parameters of virtual manipulator are shownin Table 2
4 Mathematical Problems in Engineering
d ea
c
f
h
k
l X0
Z0
Z2Z3
Z4Z1
X1
X2 X3
X5
X7
X6
Y7
Z7
Z5
Z6
X4
Y3
Figure 2 DH coordinate system of the studied robot
Table 1 The relevant parameters of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
119887119894m 119897 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
Table 2 The corresponding parameters of virtual manipulator of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
119887119894m
1198980119897
119872
(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
The Jacobian matrix of the studied robot is very com-plicated in inertial coordinate system making it verytough to analyze the singularity characteristics using matrixJ119898 directly therefore it is necessary to simplify the analyticalform of J119898 Usually the Jacobian matrix can be simplifiedgreatly by choosing an appropriate reference system anda proper reference point of the end-effector [8 10] For
the robot configuration studied in this paper the fifthjoint coordinate system Σ4 in Figure 2 is chosen as thereference system Σref and select the intersection formed bythe enlarged end-effector and the origin of Σref as the end-effector reference point And the simplified Jacobian matrixcan be obtained as follows
Jrefref =
[
[
[
[
[
[
[
[
[
[
[
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 1198901198785 +
11988911987845 1198901198785 0 0 minus
ℎ1198626
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 1198901198625 +
11988911986245 1198901198625 0 0 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 0 0 0 0 minus
ℎ1198786
1198623451198782 minus119878345 0 0 0 0 minus1198786
minus1198782119878345 minus119862345 0 0 0 minus1 0
1198622 0 1 1 1 0 1198626
]
]
]
]
]
]
]
]
]
]
]
(15)
Mathematical Problems in Engineering 5
where 119862119894 119878119894 119862119894119895 119878119894119895 119862119894119895119896 and 119878119894119895119896 represent Cos(120579119894) Sin(120579119894)Cos(120579119894 + 120579119895) Sin(120579119894 + 120579119895)Cos(120579119894 + 120579119895 + 120579119896) andSin(120579119894 + 120579119895 + 120579119896) respectively 119886 = ((1198980 + 1198981)119886)119872 119888 =(sum
2
119896=0119898119896119888)119872 119889 = (sum3
119896=0119898119896119889)119872 119890 = (sum4
119896=0119898119896119890)119872 119891 =
(sum
5
119896=0119898119896119891)119872 ℎ = (sum
6
119896=0119898119896ℎ)119872 and 119896 = (sum
7
119896=0119898119896119896)
119872In the following the singular consistency between
Jrefref and J119898 is proved in detail With respect to the referenceframe the actual end point vector 119901ref
119890and the end reference
point vector 119901refref have the following relationship (superscriptldquoref rdquo means vectors described in reference system)
119901
ref119890= 119901
refref + 119901
ref119890ref (16)
where 119901ref119890ref
is the vector from the end reference point to theactual end point
On this basis the relationship between the end referencepoint velocity Vrefref and actual end point velocity Vref
119890can be
expressed as
Vref119890= Vrefref + 120596
refref times 119901
ref119890ref= Vrefref minus p
ref119890refsdot 120596
refref (17)
where 120596refref is the angular velocity of the end reference point
Since the end reference point and the actual end pointattach to the same rigid body their angular velocities are thesame
120596
refref = 120596
ref119890 (18)
Combining (17) with (18) the actual end point velocity is
ref119890= [
Vref119890
120596
ref119890
] = [
E3 minuspref119890refO3 E3
][
Vrefref120596
refref] = Jref119890refsdot
refref (19)
Combining (12) with (19) the relationship between theoriginal Jacobian matrix J119898 and the simplified Jacobianmatrix Jrefref can be represented as
J119898 = Jref sdot Jref119898= Jref sdot J
ref119890refsdot119869
refref (20)
where Jref = [
Rref O3
O3Rref] Rref is the rotation matrix from
Σref to Σ119868 and Jref119898 is the Jacobian matrix expressed in ref-erence system Because both the determinant values of Jrefand Jref119890ref
are 1 the singularity of J119898 is equivalent to that ofJrefref The simplification will provide the foundation for robotsingularity analysis in the following section
4 Singularity Analysis
On the basis of the Jacobian matrix simplification it can befound that a 3 times 3 zero matrix exists in Jrefref The zero matrixresulted from the structure with three consecutive parallelaxes
41 The Characteristics of the Structure of Canadarm2 Forthe structure of Canadarm2 which has three consecutive
parallel axes the orientations of the joint coordinate axes cor-responding to three consecutive parallel axes are consistentWithout any loss of generality take the structure of axis 3axis 4 and axis 5 parallel to each other as an example theorientations of coordinate axes 1199112 1199113 and 1199114 are the sameas shown in Figure 2 Since reference system Σref and jointcoordinate system Σ4 coincide with each other the vector ofaxes 1199112 1199113 and 1199114 can be represented as 0 0 1T in ΣrefGenerally speaking the first three rows of Jrefref are calledlinear velocity Jacobian matrix and the last three rowsare called angular velocity Jacobian matrix Thereforethe angular velocity Jacobian submatrix corresponding tothe three consecutive parallel axes can be obtained asfollows
J120596345=[
[
0 0 0
0 0 0
1 1 1
]
]
(21)
As for the linear velocity Jacobian submatrix correspond-ing to the three consecutive parallel axes vector (119901119890 minus 119901119894) in(10) needs to be replaced by (119901refref minus 119901
ref119894) Both the vectors
(119901
refref minus 119901
ref2) (119901
refref minus 119901
ref3) are in the 119883119874119884 plane of Σref so
there are no components in 119911-axis direction Then assumethat (119901refref minus 119901
ref2) = 119886119909 119886119910 0
T (119901refref minus 119901ref3) = 119887119909 119887119910 0
T and(119901
refref minus 119901
ref4) = 0 0 0
T are obvious Meanwhile consideringthe expression 119911ref
2= 119911
ref3= 119911
ref4= 0 0 1
T the linear velocityJacobian submatrix corresponding to the three consecutiveparallel axes is as follows
JV345=[
[
minus119886119910 minus119887119910 0
119886119909 119887119909 0
0 0 0
]
]
(22)
Thus by merging (21) (22) and (23) can be constructed
J345 =[
[
[
minus119886119910 119886119909
minus119887119910 119887119909
0 0
0 0 0
0 0 0
0 0 0
1
1
1
]
]
]
T
(23)
Through the derivation above it can safely draw theconclusion that a 3 times 3 zero matrix exists in the simpli-fied Jacobian matrix of any robot with the structure ofCanadarm2
42 The Reconstruction of Jacobian Matrix The charac-teristics of the structure of Canadarm2 can be used tosimplify the singularity analysis In order to decomposethe Jacobian matrix to simplify the singularity analysismatrix Jrefref is reconstructed according to a novel stan-dard whose basic idea is to put the 3 times 3 zero matrixin the corner And the new Jacobian matrix is shown asfollows
6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
d ea
c
f
h
k
l X0
Z0
Z2Z3
Z4Z1
X1
X2 X3
X5
X7
X6
Y7
Z7
Z5
Z6
X4
Y3
Figure 2 DH coordinate system of the studied robot
Table 1 The relevant parameters of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
119887119894m 119897 1198862 1198882 1198892 1198902 1198912 ℎ2 1198962
Table 2 The corresponding parameters of virtual manipulator of the space robotic system
Base Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 Link 7Masskg 1198980 1198981 1198982 1198983 1198984 1198985 1198986 1198987
119886119894m(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
119887119894m
1198980119897
119872
(1198980 + 1198981)119886
2119872
sum
2
119896=0119898119896119888
2119872
sum
3
119896=0119898119896119889
2119872
sum
4
119896=0119898119896119890
2119872
sum
5
119896=0119898119896119891
2119872
sum
6
119896=0119898119896ℎ
2119872
sum
7
119896=0119898119896119896
2119872
The Jacobian matrix of the studied robot is very com-plicated in inertial coordinate system making it verytough to analyze the singularity characteristics using matrixJ119898 directly therefore it is necessary to simplify the analyticalform of J119898 Usually the Jacobian matrix can be simplifiedgreatly by choosing an appropriate reference system anda proper reference point of the end-effector [8 10] For
the robot configuration studied in this paper the fifthjoint coordinate system Σ4 in Figure 2 is chosen as thereference system Σref and select the intersection formed bythe enlarged end-effector and the origin of Σref as the end-effector reference point And the simplified Jacobian matrixcan be obtained as follows
Jrefref =
[
[
[
[
[
[
[
[
[
[
[
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 1198901198785 +
11988911987845 1198901198785 0 0 minus
ℎ1198626
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 1198901198625 +
11988911986245 1198901198625 0 0 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 0 0 0 0 minus
ℎ1198786
1198623451198782 minus119878345 0 0 0 0 minus1198786
minus1198782119878345 minus119862345 0 0 0 minus1 0
1198622 0 1 1 1 0 1198626
]
]
]
]
]
]
]
]
]
]
]
(15)
Mathematical Problems in Engineering 5
where 119862119894 119878119894 119862119894119895 119878119894119895 119862119894119895119896 and 119878119894119895119896 represent Cos(120579119894) Sin(120579119894)Cos(120579119894 + 120579119895) Sin(120579119894 + 120579119895)Cos(120579119894 + 120579119895 + 120579119896) andSin(120579119894 + 120579119895 + 120579119896) respectively 119886 = ((1198980 + 1198981)119886)119872 119888 =(sum
2
119896=0119898119896119888)119872 119889 = (sum3
119896=0119898119896119889)119872 119890 = (sum4
119896=0119898119896119890)119872 119891 =
(sum
5
119896=0119898119896119891)119872 ℎ = (sum
6
119896=0119898119896ℎ)119872 and 119896 = (sum
7
119896=0119898119896119896)
119872In the following the singular consistency between
Jrefref and J119898 is proved in detail With respect to the referenceframe the actual end point vector 119901ref
119890and the end reference
point vector 119901refref have the following relationship (superscriptldquoref rdquo means vectors described in reference system)
119901
ref119890= 119901
refref + 119901
ref119890ref (16)
where 119901ref119890ref
is the vector from the end reference point to theactual end point
On this basis the relationship between the end referencepoint velocity Vrefref and actual end point velocity Vref
119890can be
expressed as
Vref119890= Vrefref + 120596
refref times 119901
ref119890ref= Vrefref minus p
ref119890refsdot 120596
refref (17)
where 120596refref is the angular velocity of the end reference point
Since the end reference point and the actual end pointattach to the same rigid body their angular velocities are thesame
120596
refref = 120596
ref119890 (18)
Combining (17) with (18) the actual end point velocity is
ref119890= [
Vref119890
120596
ref119890
] = [
E3 minuspref119890refO3 E3
][
Vrefref120596
refref] = Jref119890refsdot
refref (19)
Combining (12) with (19) the relationship between theoriginal Jacobian matrix J119898 and the simplified Jacobianmatrix Jrefref can be represented as
J119898 = Jref sdot Jref119898= Jref sdot J
ref119890refsdot119869
refref (20)
where Jref = [
Rref O3
O3Rref] Rref is the rotation matrix from
Σref to Σ119868 and Jref119898 is the Jacobian matrix expressed in ref-erence system Because both the determinant values of Jrefand Jref119890ref
are 1 the singularity of J119898 is equivalent to that ofJrefref The simplification will provide the foundation for robotsingularity analysis in the following section
4 Singularity Analysis
On the basis of the Jacobian matrix simplification it can befound that a 3 times 3 zero matrix exists in Jrefref The zero matrixresulted from the structure with three consecutive parallelaxes
41 The Characteristics of the Structure of Canadarm2 Forthe structure of Canadarm2 which has three consecutive
parallel axes the orientations of the joint coordinate axes cor-responding to three consecutive parallel axes are consistentWithout any loss of generality take the structure of axis 3axis 4 and axis 5 parallel to each other as an example theorientations of coordinate axes 1199112 1199113 and 1199114 are the sameas shown in Figure 2 Since reference system Σref and jointcoordinate system Σ4 coincide with each other the vector ofaxes 1199112 1199113 and 1199114 can be represented as 0 0 1T in ΣrefGenerally speaking the first three rows of Jrefref are calledlinear velocity Jacobian matrix and the last three rowsare called angular velocity Jacobian matrix Thereforethe angular velocity Jacobian submatrix corresponding tothe three consecutive parallel axes can be obtained asfollows
J120596345=[
[
0 0 0
0 0 0
1 1 1
]
]
(21)
As for the linear velocity Jacobian submatrix correspond-ing to the three consecutive parallel axes vector (119901119890 minus 119901119894) in(10) needs to be replaced by (119901refref minus 119901
ref119894) Both the vectors
(119901
refref minus 119901
ref2) (119901
refref minus 119901
ref3) are in the 119883119874119884 plane of Σref so
there are no components in 119911-axis direction Then assumethat (119901refref minus 119901
ref2) = 119886119909 119886119910 0
T (119901refref minus 119901ref3) = 119887119909 119887119910 0
T and(119901
refref minus 119901
ref4) = 0 0 0
T are obvious Meanwhile consideringthe expression 119911ref
2= 119911
ref3= 119911
ref4= 0 0 1
T the linear velocityJacobian submatrix corresponding to the three consecutiveparallel axes is as follows
JV345=[
[
minus119886119910 minus119887119910 0
119886119909 119887119909 0
0 0 0
]
]
(22)
Thus by merging (21) (22) and (23) can be constructed
J345 =[
[
[
minus119886119910 119886119909
minus119887119910 119887119909
0 0
0 0 0
0 0 0
0 0 0
1
1
1
]
]
]
T
(23)
Through the derivation above it can safely draw theconclusion that a 3 times 3 zero matrix exists in the simpli-fied Jacobian matrix of any robot with the structure ofCanadarm2
42 The Reconstruction of Jacobian Matrix The charac-teristics of the structure of Canadarm2 can be used tosimplify the singularity analysis In order to decomposethe Jacobian matrix to simplify the singularity analysismatrix Jrefref is reconstructed according to a novel stan-dard whose basic idea is to put the 3 times 3 zero matrixin the corner And the new Jacobian matrix is shown asfollows
6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
where 119862119894 119878119894 119862119894119895 119878119894119895 119862119894119895119896 and 119878119894119895119896 represent Cos(120579119894) Sin(120579119894)Cos(120579119894 + 120579119895) Sin(120579119894 + 120579119895)Cos(120579119894 + 120579119895 + 120579119896) andSin(120579119894 + 120579119895 + 120579119896) respectively 119886 = ((1198980 + 1198981)119886)119872 119888 =(sum
2
119896=0119898119896119888)119872 119889 = (sum3
119896=0119898119896119889)119872 119890 = (sum4
119896=0119898119896119890)119872 119891 =
(sum
5
119896=0119898119896119891)119872 ℎ = (sum
6
119896=0119898119896ℎ)119872 and 119896 = (sum
7
119896=0119898119896119896)
119872In the following the singular consistency between
Jrefref and J119898 is proved in detail With respect to the referenceframe the actual end point vector 119901ref
119890and the end reference
point vector 119901refref have the following relationship (superscriptldquoref rdquo means vectors described in reference system)
119901
ref119890= 119901
refref + 119901
ref119890ref (16)
where 119901ref119890ref
is the vector from the end reference point to theactual end point
On this basis the relationship between the end referencepoint velocity Vrefref and actual end point velocity Vref
119890can be
expressed as
Vref119890= Vrefref + 120596
refref times 119901
ref119890ref= Vrefref minus p
ref119890refsdot 120596
refref (17)
where 120596refref is the angular velocity of the end reference point
Since the end reference point and the actual end pointattach to the same rigid body their angular velocities are thesame
120596
refref = 120596
ref119890 (18)
Combining (17) with (18) the actual end point velocity is
ref119890= [
Vref119890
120596
ref119890
] = [
E3 minuspref119890refO3 E3
][
Vrefref120596
refref] = Jref119890refsdot
refref (19)
Combining (12) with (19) the relationship between theoriginal Jacobian matrix J119898 and the simplified Jacobianmatrix Jrefref can be represented as
J119898 = Jref sdot Jref119898= Jref sdot J
ref119890refsdot119869
refref (20)
where Jref = [
Rref O3
O3Rref] Rref is the rotation matrix from
Σref to Σ119868 and Jref119898 is the Jacobian matrix expressed in ref-erence system Because both the determinant values of Jrefand Jref119890ref
are 1 the singularity of J119898 is equivalent to that ofJrefref The simplification will provide the foundation for robotsingularity analysis in the following section
4 Singularity Analysis
On the basis of the Jacobian matrix simplification it can befound that a 3 times 3 zero matrix exists in Jrefref The zero matrixresulted from the structure with three consecutive parallelaxes
41 The Characteristics of the Structure of Canadarm2 Forthe structure of Canadarm2 which has three consecutive
parallel axes the orientations of the joint coordinate axes cor-responding to three consecutive parallel axes are consistentWithout any loss of generality take the structure of axis 3axis 4 and axis 5 parallel to each other as an example theorientations of coordinate axes 1199112 1199113 and 1199114 are the sameas shown in Figure 2 Since reference system Σref and jointcoordinate system Σ4 coincide with each other the vector ofaxes 1199112 1199113 and 1199114 can be represented as 0 0 1T in ΣrefGenerally speaking the first three rows of Jrefref are calledlinear velocity Jacobian matrix and the last three rowsare called angular velocity Jacobian matrix Thereforethe angular velocity Jacobian submatrix corresponding tothe three consecutive parallel axes can be obtained asfollows
J120596345=[
[
0 0 0
0 0 0
1 1 1
]
]
(21)
As for the linear velocity Jacobian submatrix correspond-ing to the three consecutive parallel axes vector (119901119890 minus 119901119894) in(10) needs to be replaced by (119901refref minus 119901
ref119894) Both the vectors
(119901
refref minus 119901
ref2) (119901
refref minus 119901
ref3) are in the 119883119874119884 plane of Σref so
there are no components in 119911-axis direction Then assumethat (119901refref minus 119901
ref2) = 119886119909 119886119910 0
T (119901refref minus 119901ref3) = 119887119909 119887119910 0
T and(119901
refref minus 119901
ref4) = 0 0 0
T are obvious Meanwhile consideringthe expression 119911ref
2= 119911
ref3= 119911
ref4= 0 0 1
T the linear velocityJacobian submatrix corresponding to the three consecutiveparallel axes is as follows
JV345=[
[
minus119886119910 minus119887119910 0
119886119909 119887119909 0
0 0 0
]
]
(22)
Thus by merging (21) (22) and (23) can be constructed
J345 =[
[
[
minus119886119910 119886119909
minus119887119910 119887119909
0 0
0 0 0
0 0 0
0 0 0
1
1
1
]
]
]
T
(23)
Through the derivation above it can safely draw theconclusion that a 3 times 3 zero matrix exists in the simpli-fied Jacobian matrix of any robot with the structure ofCanadarm2
42 The Reconstruction of Jacobian Matrix The charac-teristics of the structure of Canadarm2 can be used tosimplify the singularity analysis In order to decomposethe Jacobian matrix to simplify the singularity analysismatrix Jrefref is reconstructed according to a novel stan-dard whose basic idea is to put the 3 times 3 zero matrixin the corner And the new Jacobian matrix is shown asfollows
6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Jref1015840
ref =
[
[
[
[
[
[
[
[
[
[
[
1198622 0 1198626 0 1 1 1
1198622 (119886119862345 + 1198901198785 +11988911987845) minus (119888 +
119891) 1198782119878345 minus (119888 +
119891)119862345 minus
ℎ1198626 0 1198901198785 +
11988911987845 1198901198785 0
minus (119888 +119891) 1198782119862345 + 1198622 (minus119886119878345 + 1198901198625 +
11988911986245) (119888 +
119891) 119878345 0 0 1198901198625 +
11988911986245 1198901198625 0
minus1198782 (119886 minus1198891198783 minus 11989011987834)
1198891198623 + 11989011986234 minus
ℎ1198786 0 0 0 0
1198623451198782 minus119878345 minus1198786 0 0 0 0
minus1198782119878345 minus119862345 0 minus1 0 0 0
]
]
]
]
]
]
]
]
]
]
]
(24)
Since the elementary transformation of matrix does notchange its singularity the singularity characteristic of thematrix Jref
1015840
ref will be analyzed instead in the following discus-sion According to (12) and (14) the relationship betweenthe velocity of the end reference point and the joint angularvelocity can be described as
ref1015840ref =
Jref1015840
ref sdot120579
1015840
(25)
where ref1015840
ref = ref119911 120592
ref119909 120592
ref119910 120592
ref119911
ref119909
ref119910
Tand 120579
1015840=
1205791
1205792
1205797
1205796
1205793
1205794
1205795
T
43 Singularity Analysis On the basis of matrix reconstruc-tion Jref
1015840
ref can be decomposed to facilitate the singularityanalysis Considering (24) having a 3 times 3 zero matrix in theright bottom corner the decomposed matrix can be writtenas
Jref1015840
ref = [J11 J12J21 O3
] (26)
And the joint angular velocities can be obtained accord-ing to (26)
120579
1015840
(567)= (J12)
minus1[
ref1015840ref(123) minus 11986911
120579
1015840
(1234)]
120579
1015840
(1234)= (J21)
dagger
ref1015840ref(456)
(27)
Now we know that the robot singularity is only relevantto matrixes J12 and J21 In this way singularity analysis ofredundant space robots with the structure of Canadarm2will be simplified greatly Consequently in the followingthe singularity conditions of matrixes J12 and J21 will bediscussed
431The Singularity Condition ofMatrix J12 BecausematrixJ12 is a 3 times 3 square matrix the singularity condition can bedirectly obtained through its determinant value 1198891198901198784 HenceCond1 1198784 = 0 is the singularity condition of J12
Substituting 1198784 = 0 into matrix Jref1015840
ref we can get the basesolution vectorThen the singular direction corresponding tothe singularity condition is
119880
ref1199041= 0 minus11986251198786 11987851198786 119873119886 minus
ℎ119873119886 +
ℎ11986251198626 0
T (28)
where119873119886 = (minus(119888+ 119891)119862341198786+ℎ11987834511986251198626)(ℎ119878345+11989011986234+ 1198891198623)
432 The Singularity Condition of Matrix J21 Since J21 isinR3times4 is not square and the determinant value expression ofmatrix J21 sdot J11987921 is very complicated the singularity conditionof matrix J21 will be analyzed by using its four 3 times 3submatrixes [16] All the four submatrix determinant valuesare listed in the following
Det (11986921(123)) = 11987821198786 (ℎ + 119886119862345 + 1198901198785 + 11988911987845)
Det (11986921(124)) = 1198782 (1198901198625 + 11988911986245 minus 119886119878345)
Det (11986921(134)) = minus 11987821198786 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
Det (11986921(234)) = 1198786 ( 1198891198623 + 11989011986234 + ℎ119878345)
(29)
where J21(119894119895119896) represents the matrix composed of column119894 119895 119896 of J21
Set each determinant value of (29) to zero simultaneouslyand the singularity conditions are
Cond2 1198782 = 0 1198786 = 0
Cond3 1198782 = 0 1198891198623 + 11989011986234 +
ℎ119878345 = 0
Cond4 1198786 = 0 1198901198625 +11988911986245 minus 119886119878345 = 0
Cond5 1198891198623 + 11989011986234 + ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
(30)
All the conditions except Cond5 can be easily obtainedConsidering the multiplication factors except 1198782 and 1198786 in(29) the following relationships can be found
ℎ + 119886119862345 + 1198901198785 +
11988911987845 = 119878345 (
1198891198623 + 11989011986234 +
ℎ119878345)
+119862345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
1198901198625 +11988911986245 minus 119886119878345 = 119862345 (
1198891198623 + 11989011986234 +
ℎ119878345)
minus 119878345 (119886 +ℎ119862345 minus
1198891198783 minus 11989011987834)
(31)
Clearly the linear combination condition of ℎ + 119886119862345 +1198901198785 +
11988911987845 = 0 and 1198901198625 + 11988911986245 minus 119886119878345 = 0 is equivalent to the
condition of 1198891198623+11989011986234+ℎ119878345 = 0 and 119886+ℎ119862345minus 1198891198783minus11989011987834 =0 Thus Cond5 can be obtained
Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 3 The summary of examples
Number Singularity condition Joint angle Det(J119898 sdot (J119898)T)
Cond11198784 = 0
25
∘ 0
∘ 90
∘ 0
∘ 45
∘ 90
∘ 0
∘ minus106608 times 10minus14
Cond21198782 = 1198786 = 0
25
∘ 0
∘ 34
∘ 30
∘ 45
∘ 0
∘ 0
∘ minus680933 times 10minus14
Cond31198782 = 0
1198891198623 + 11989011986234 +
ℎ119878345 = 0
25
∘ 0
∘ 20
∘ 140
∘ minus1391
∘ 45
∘ 0
∘ 243766 times 10minus30
Cond41198786 = 0 1198901198625 +
11988911986245 minus 119886119878345 = 0
25
∘ 10
∘ minus1329
∘ 140
∘ 20
∘ 0
∘ 0
∘ 297193 times 10minus12
Cond51198891198623 + 11989011986234 +
ℎ119878345 = 0
119886 +ℎ119862345 minus
1198891198783 minus 11989011987834 = 0
25
∘ 10
∘ 24
∘ 180
∘ minus449
∘ 45
∘ 0
∘ minus160952 times 10minus16
ZX
Y Σref
Us5
Figure 3 The singular configuration corresponding to Cond1
Z
X
Y
ΣrefUs1 Us1 120596
Figure 4 The singular configuration corresponding to Cond2
Substituting the four singularity conditions above intomatrix Jref
1015840
ref respectively we can get the base solution vectorsThen the singular direction corresponding to each singular-ity condition is listed as
119880
ref1199041= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199042= 0 0 0 1 minus
ℎ 0
T
119880
ref1199043= 0 0 0 119878345
1198891198623 + 11989011986234 0
T
119880
ref1199044= 0 0 0 1 minus
ℎ 0
T
(32)
5 Simulation Results
In order to verify the effectiveness of the singularity analysismethod proposed in this paper the following verifications are
Z
XY Σref
Us2
Us2 120596
Figure 5 The singular configuration corresponding to Cond3
carried out Assign the robot parameters in Figure 2 119886 = 119888 =119891 = ℎ = 119896 = 119897 = 05m 119889 = 119890 = 25m 1198980 = 1000 kg 1198981 =1198982 = 1198985 = 1198986 = 1198987 = 30 kg and 1198983 = 1198984 = 100 kg Thecorresponding parameters of virtual manipulator are 119886 =
038m 119888 = 039m 119889 = 215m 119890 = 233m 119891 = 048m ℎ =049m and 119896 = 05m List five groups of robot joint anglessatisfying the five singularity conditions above respectivelyand solve the corresponding determinant values of J119898 sdot (J119898)
TThen the relative results are shown in Table 3
From Table 3 it can be found that all the determinantvalues of J119898 sdot (J119898)
T approach to zero Thus it can be judgedthat robot singularity happens
According to the analytical expressions of singular direc-tions given above the singular configuration and singulardirection corresponding to each singularity condition areshown in Figures 3 4 5 6 and 7
In the process of singularity analysis because the sim-plified Jacobian matrix shows the relationship between thevelocity of the end reference point and joint angular velocitiesin reference system Σref the singular direction given inFigures 3 to 7 describes the degradation direction of the endreference point expressed in reference system Σref
8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Z
XY Σref
Us3 Us3 120596
Figure 6 The singular configuration corresponding to Cond4
Z
XY
Σref
Us4
Us4 120596
Figure 7 The singular configuration corresponding to Cond5
The simulation results verify the effectiveness of theproposed method of singularity analysis for redundant spacerobots with the structure of Canadarm2
6 Summary and Conclusions
A novel singularity analysis method for redundant spacerobots with the structure of Canadarm2 is proposed in thepaper Different from ground robots the singularity analysisof space robots needs to consider the dynamic parametersbecause of themoving baseTherefore the ldquovirtualmanipula-torrdquo method is employed to transfer the singularity problemto that of a ground one As the generalized Jacobian matrixis very complex it is greatly simplified by choosing a properreference system and an end reference point and the equiva-lence of singularity is analyzed in detail Then on the basis ofnovel reconstruction the simplified Jacobian matrix can bedecomposed to reduce the complexity of singularity analysisFinally through the analysis of the submatrixes singularity
conditions and singular directions of the redundant spacerobot with the structure of Canadarm2 are obtained Themethod proposed in the paper is effective and needs lesscalculation
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is supported by the National Key Basic ResearchProgram of China (2013CB733000) the Specialized ResearchFund for the Doctoral Program of Higher Education(20120005120004) and the Fundamental Research Funds forthe Central Universities (2013PTB-00-01)
References
[1] J Gunn R Blackburn and P J Taylor Forensic PsychiatryClinical Legal and Ethical Issues Butterworth-HeinemannOxford UK 1993
[2] M W Spong and M Vidyasagar Robot Dynamics and ControlJohn Wiley amp Sons 2008
[3] D E Whitney ldquoResolved motion rate control of manipulatorsand human prosthesesrdquo IEEE Transaction on Man-MachineSystems vol 10 no 2 pp 47ndash53 1969
[4] W Chou TWang Q Zhang and ZWu ldquoSingularities analysisof redundant robot manipulatorrdquoChinese Journal of MechanicalEngineering vol 36 no 9 pp 33ndash36 2000
[5] R P Podhorodeski S BNokleby and JDWittchen ldquoResolvingvelocity-degenerate configurations (singularities) of redundantmanipulatorsrdquo in Proceedings of the Design Engineering Techni-cal Conferences and Computers and Information in EngineeringConference Baltimore Md USA September 2000
[6] S B Nokleby and R P Podhorodeski ldquoReciprocity-based reso-lution of velocity degeneracies (singularities) for redundantmanipulatorsrdquo Mechanism and Machine Theory vol 36 no 3pp 397ndash409 2001
[7] S B Nokleby and R P Podhorodeski ldquoIdentifying multi-DOF-loss velocity degeneracies in kinematically-redundantanipulatorsrdquoMechanism andMachineTheory vol 39 no 2 pp201ndash213 2004
[8] S B Nokleby ldquoSingularity analysis of the Canadarm2rdquoMecha-nism and Machine Theory vol 42 no 4 pp 442ndash454 2007
[9] J KWaldron and J Reidy ldquoA study of a kinematically redundantmanipulator structurerdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation vol 3 pp 1ndash8 IEEESan Francisco USA April 1986
[10] K J Waldron S Wang and S J Bolin ldquoA study of the Jaco-bian Matrix of serial manipulatorsrdquo Journal of MechanismsTransmissions andAutomation inDesign vol 107 no 2 pp 230ndash238 1985
[11] F T Cheng J S Chen and F C Kung ldquoStudy and resolutionof singularities for a 7-DOF redundant manipulatorrdquo IEEETransactions on Industrial Electronics vol 45 no 3 pp 469ndash480 1998
Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[12] W Xu B Liang and Y Xu ldquoPractical approaches to handlethe singularities of a wrist-partitioned space manipulatorrdquo ActaAstronautica vol 68 no 1-2 pp 269ndash300 2011
[13] D Nenchev Y Umetani and K Yoshida ldquoAnalysis of a redun-dant free-flying spacecraftmanipulator systemrdquo IEEE Transac-tions on Robotics and Automation vol 8 no 1 pp 1ndash6 1992
[14] Z Vafa and S Dubowsky ldquoOn the dynamics of space manip-ulator using the virtual manipulator with application to pathplanningrdquo The Journal of the Astronautical Science vol 5 no3 pp 303ndash314 1989
[15] Z Vafa and S Dubowsky ldquoKinematics and dynamics of spacemanipulators the virtual manipulator approachrdquo The Interna-tional Journal of Robotics Research vol 9 no 4 pp 3ndash21 1990
[16] Robotix Associates ldquoA singularity analysis of the space stationremote manipulator system (SSRMS)rdquo Tech Rep RobotixAssociates Gainesville Fla USA 1989
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Singularity - easybuilders.github.ioeasybuilders.github.io/easybuild/files/EUM17/20170208-1_Singularity… · Singularity Workflow 1. Create image file $ sudo singularity create [image]](https://img.pdfslide.us/doc/110x75/5f0991027e708231d4277151/singularity-singularity-workflow-1-create-image-file-sudo-singularity-create.jpg)


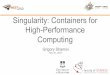











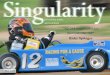



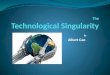




![[William Sleator] Singularity](https://img.pdfslide.us/doc/110x75/5466dabbb4af9f4e3f8b55e2/william-sleator-singularity.jpg)