Embed Size (px)
Citation preview

Research ArticleRBF Neural Network Control for Linear Motor-Direct DriveActuator Based on an Extended State Observer
Zhi Liu and Tefang Chen
School of Traffic and Transportation Engineering Central South University Changsha China
Correspondence should be addressed to Zhi Liu 124201002csueducn
Received 27 June 2016 Accepted 16 October 2016
Academic Editor Juan R Torregrosa
Copyright copy 2016 Z Liu and T Chen This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Hydraulic power and other kinds of disturbance in a linear motor-direct drive actuator (LM-DDA) have a great impact on theperformance of the system A mathematical model of the LM-DDA system is established and a double-loop control system ispresented An extended state observer (ESO) with switched gain was utilized to estimate the influence of the hydraulic power andother load disturbances Meanwhile Radial Basis Function (RBF) neural network was utilized to optimize the parameters in thisintelligent controller The results of the dynamic tests demonstrate the performance with rapid response and improved accuracycould be attained by the proposed control scheme
1 Introduction
Currently the most common electrohydraulic actuator is themultistage hydraulic actuator with the nozzle flapper pilot[1] But this kind of actuator has disadvantages such as pooranticontamination characteristics low-frequency responseand low-power density So the linear motor-direct driveactuator (LM-DDA) system [2 3] which would greatlysimplify the mechanical structure and improve the controlfrequency response has attracted great attention in recentyears Compared to the traditional hydraulic actuator thelargest difference is the abolition of the amplification stage[4] In the LM-DDA system the spool valve body is straightlydriven by the linear motor So the frequency of the spoolmovement has been significantly improved However due tothe cancellation of the hydraulic amplifier stage the wholesystem has strong nonlinearity and uncertainty [5] The fluidpower and other loads directly couple to the linear motor sofluid power would have a great impact on the system stabilityand dynamic control performance
In the position-closed-loop control system of the DDAthe traditional design is established on the hypothesis thatthe load force disturbance is 0 or a fixed value The trans-fer functions of the actual value and the reference valuebetween spool positions are obtained from this method to
optimize the closed-loop transfer function for the purposeof accomplishing the controller design Negative feedback onload force disturbance has a certain extent to attenuate thehydraulic disturbance but it does not completely eliminatethis influence [6 7]
To achieve rapid response and robustness motions ahigh-performance controller with advanced control schemeis required to be designed PID control is the most conven-tional control method [8 9] In general the control of the LMis wished to have accurate signal tracking for the commanddespite the influence of the transient and steady flow forceor the fluctuation of the systemrsquos mechanical characteristicsIn addition the response should be rapid due to the designrequirement However the classic linear PID controller hasan unavoidable long recovery process and an inevitable errorwhen the system reaches a stable state [10 11] In this case theclassic PID control strategy could not get fast and accurateposition response So many design techniques have beenproposed to tackle this problem The literature [12] reporteda control scheme based on disturbance observer to realizemotion control with high accuracy Yet this strategy useslow-pass filter so the performance of the actuator would beinfluenced while tracking the high-frequency signal Fuzzycontrol [13] is an intelligent control method on the basis offuzzy set theory fuzzy language variables and fuzzy logic
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2016 Article ID 8390529 10 pageshttpdxdoiorg10115520168390529
2 Discrete Dynamics in Nature and Society
reasoningThebasic idea is to experience expert control of thecontrolled object into a series of control rules Fuzzy controldoes not rely on the specific mathematical model of the plantso its applicable scope is wide and it is easy to be achievedby using digital controller when the nonlinear time varyingload has certain robustness Although fuzzy control strategiesimprove the intelligence they simply use more control rulesIn this case much expert experience is needed to settle therules So the control accuracy is relatively low without theexpert experience
Artificial neural network [14 15] has the advantages ofdistributed storage parallel processing nonlinear approxi-mation and self-learning So it shows a broad applicationprospect in the field of linear servo control ESO is borrowedfrom the idea of state observer [16] and it would be ableto affect the output of the controlled object disturbanceexpansion into a new state variable The establishment ofstate variables can be observed with the expansion of theobserver with a special feedback mechanism ESO distur-bance generated does not depend on the specific model anddoes not need to directly measure the role of disturbancesThe algorithm could be written as a discrete form and italso has the advantages of having a simple structure havinga small amount of calculation being easy to implement andbeing a real-time digital controller Therefore ESO is a moreversatile and practical disturbance observer [17]
The remainder of this paper is organized as follows InSection 2 the model of a DDA system is established andhow hydraulic power has a bad effect on the control of LM isanalyzed Section 3 introduces ESO into the control systemThe optimal parameters in position controller are obtained byminimizing the energy gain between the spool position andthe modeling error And the method is implemented by animproved back-propagation algorithm with the weight bal-ance Research experiment process is presented in Section 4where a novel hardware structure of LM-DDA control basedon digital signal processor (DSP) and field programmablegate array (FPGA) is given
2 Modeling of Direct Drive Actuator Systemwith Linear Motor
Figure 1 shows the structure of a DDA systemAs is shown in Figure 1 in the LM-DDA system the
linear motor directly connects to the spool 119879 is the returnport 119860 and 119861 denote the two direction control ports and 119875represents the entrance port The intelligent controller of thespool receives position reference and feedback And it wouldgenerate the current command to drive the linear motor andcomplete the closed-loop control The force withstood by thespool includes thrust force steady-state fluid power and flowfluid power Since the body of the actuator is well lubricatedthe impact of the friction is ignored
The dynamic model of spool could be constructed as
119898119904 11988911990921199041198891199052 + 119861119904 119889119909V119889119905 + 119865119897 = 119865119904 (1)
where119898119904 represents the quality of the spool119909119904 is the displace-ment of the spool which could bemeasured by a displacement
sensor 119861119904 is the viscous damping coefficient of the spool and119865119897 denotes the disturbance of the spool which includes thetransient hydraulic force and steady hydraulic force
With Laplace transformation to (1) it can be drawn that
119909119904 (119904) = 11198981199041199042 + 119861119904119904 (119865119904 (119904) minus 119865119897 (119904)) (2)
The hydraulic force has great influence on the openingof the spool and would directly affect the flow of the valveand it should be considered As is mentioned above thehydraulic force includes the transient hydraulic force andsteady hydraulic force In general the steady hydraulic forceplays a main role The existence of the steady hydraulic forceincreases the driving force of the spool and could causevibration and nonlinear problem yet there is no mechanicalcompensation or pressure drop which would completelyeliminate the influence of the steady axial hydraulic force
The steady hydraulic force could be expressed as follows
119865st = minus2119862119881120596119883VΔ119901 cos 120579 (3)
The transient hydraulic force is
119865tr = 120588 (1198711 minus 1198712) 119862119881120596radic 2120588Δ119901119889119883V119889119905 (4)
where119883V is the area of dischargeΔ119901 exemplifies the pressurewhich drops across the outlet 120596 is the region gradient of theDDA (1198711minus1198712) is the length of the damper119862119881 represents thecoefficient of the volume 120579 denotes the angle of the flow and120588 is the density of the oil liquid
The existence of the axial hydraulic power increases thedriving force of the spool and it would cause the vibrationand nonlinear problem Due to the fact that the axialhydraulic power is related to the operation condition of theDDA it is difficult to achieve the real-time compensation offluid dynamics And this phenomenon could not be com-pletely eliminated Figure 2 illustrates the whole controllingprocess of the LM-DDA system Because the conventionalmethod could not meet the design requirement the parame-ters of the position control are first adjusted by the RBFneuralnetwork automatically and then the hydraulic disturbance isestimated by the ESO
3 The Proposed Control Scheme
ESO is borrowed from the ideas of the state observer it isable to get the new state variables from the disturbance func-tion that would influence the controlled output Special feed-back mechanism is established to observe the extended statevariables The basic mechanism of the ESO is that since thealleged output is observable the output signal contains theinformation about the disturbance So it could be extractedfrom the output In this paper ESO is used to establish themodel of the unknown external disturbance (unpredictablehydraulic force)
Discrete Dynamics in Nature and Society 3
Intelligentcontroller Current
Displacementsensor
Spool
Valvechamber
Coilwinding
Magnet
Spring
T A P B
Position reference
Position feedback
Figure 1 The structure of the DDA
Power converter Coil windingConstant of the
thrust forceLinear motor
Position loop Current loop
Digitalcontroller
Position-feedback constant
Current-feedback constantConstant ofback-EMF
Spool
XrefWp(s)
Iref(s)
+
+
+minusminusminusminus
Wi(s)Wpwm(s) Cf
Fi(s)
Ce
Fl(s)
Vm(s) 1
s
xs
mss2 + Bss
1
mm + Bm
120572
120573
U120581(s)
E120581(s)
I120581(s)1
L120581s + R120581
Figure 2 Block diagram of a double-loop intelligent controller
The high order model (order = 119899) can be expressed asfollows
1 = 11990922 = 1199093
119899minus1 = 119909119899
119899 = 119891 (119905 1199091 1199092 119909119899 119908) + 119887119906119910 = 1199091 + Λ
(5)
where119908 is external disturbance variable 119906 is control variable119891(119909 119909(119899minus1) 119905) is an uncertain plant and Λ representsthe output noise of the system
The state-space model of the system is given in thefollowing form
x (119905) = 119860x (119905) + 119861 (119891 (119905) + 119906 (119905)) 119910 (119905) = 119862119909 (119905) + Λ (119905) (6)
where 119860 = [[0 1 sdotsdotsdot sdotsdotsdot 00 0 1 sdotsdotsdot 0 d d d
0 sdotsdotsdot sdotsdotsdot 0 10 0 sdotsdotsdot sdotsdotsdot 0
]]119899times119899
119861 = [0 0 sdot sdot sdot 1 0]1198791times119899
119862 =[1 0 sdot sdot sdot sdot sdot sdot 0]
1times119899
Define 119909119899+1 = 119891(sdot) as the extended state of the systemdescribed in (6) and define x = [1199091 1199092 sdot sdot sdot 119909119899 119909119899+1]119879 asthe whole state of the system
So the extended state observer should be described as
119890 = 1199111 minus 1199101199111 = 2 + 1205721120576 (1199091 + Λ minus 1) 1199112 = 3 + 12057221205762 (1199091 + Λ minus 1)
119911119899 = 119899+1 + 1198870119906 + 120572119899120576119899 (1199091 + Λ minus 1)
119911119899+1 = 120572119899+1120576119899+1 (1199091 + Λ minus 1)
(7)
4 Discrete Dynamics in Nature and Society
where x = [1 2 sdot sdot sdot 119899 119899+1]119879 is the observable of x 119890 isthe tracking error of the ESO and 1198870 is the estimated value of119887 1205721 1205722 sdot sdot sdot 120572119899 120572119899+1 is the adjusting gain and 120576 is a smallpositive constant
Define M119879 = (1205721120576 12057221205762 sdot sdot sdot 120572119899120576119899 120572119899+1120576119899+1) as thegain vector In order to ensure the convergence of the ESO theroots of polynomial (8) should all be located on the negativeplane
119904119899+1 + 1205721119904119899 + sdot sdot sdot + 120572119899119904 + 120572119899+1 = 0 (8)
The existence of the output noise Λ would have a badinfluence on the performance of the ESO When the gain ofthe ESO is larger the tracking speed is faster but ESO wouldbemore sensitive to the influence of the output noiseΛ so inthis paper a switching rule is designed to tackle this problem
According to the characteristics of the ESO when thetracking error 119890 is large a small parameter M1119879 is selectedso as to estimate the system state and its uncertainty quicklyWhen the tracking error 119890 decreases to a certain value(meanwhile ESO tracks the state and the extended state ofthe system) a large parameter M2119879 is selected so that thesystemrsquos sensitivity to the noise could be reduced and the highfrequency of the noise could be filtered to some extent M1119879andM2119879 are
M1119879 = [12057211120576 120572121205762 sdot sdot sdot 1205721119899120576119899
1205721(119899+1)120576119899+1 ] M2119879 = [12057221120576 120572221205762 sdot sdot sdot 1205722119899120576119899
1205722(119899+1)120576119899+1 ] (9)
In order to avoid the duplicated switching of the proposedmethod a delay timer is used So the procedure of theswitching of the ESO is arranged as follows
(1) When |119890| gt 120597 the delay timer is reset and M1119879 isselected
(2) When |119890| isin [minus120597 120597] the delay timer is activated andM1119879 is still selected
(3) When the delay time is over meanwhile |119890| isin [minus120597 120597]and the gain of the ESO is switched toM2119879
Meanwhile 120597 determines the switching regionThe position loop is most related to the dynamic and
static performance of the DDA In the proposed schemenonlinear arrangement is used to attenuate the influence ofthe hydraulic force Tracking differentiator is arranged asfollows
119890 = V1 minus V0V1 = V1 + ℎ sdot V2V2 = V2 + ℎ sdot 119891st (119890 V2 1199030 ℎ)
(10)
where 119891st(1199091 1199092 119903 ℎ) is the most comprehensive function V1is the arranged transition of V0 and ℎ is the sampling period
The most comprehensive function 119891st(1199091 1199092 119903 ℎ) isexpressed as follows
119889 = 120575 sdot ℎ1198890 = ℎ sdot 119889119910 = 1199091 + ℎ sdot 11990921198860 = radic1198892 + 7119903 sdot 10038161003816100381610038161199101003816100381610038161003816
119886 = 1199092 + (1198860 minus 119889)2 sign (119910) 10038161003816100381610038161199101003816100381610038161003816 gt 11988901199092 + 119910ℎ 10038161003816100381610038161199101003816100381610038161003816 le 1198890
119891st = minus120575 sdot sign (119886) |119886| gt 119889120575119886119889 |119886| le 119889
(11)
where 120575 represents a coefficient which determines the track-ing speed
The nonlinear state feedback function is arranged asfollows
1198900 (120591) = int11990501198901 (120591) 119889120591
1198901 = V1 minus 11991111198902 = V2 minus 1199112119906 = 12057301 sdot 119891119886119897 (1198900 120572 120575) + 12057302 sdot 119891119886119897 (1198901 120572 120575) + 12057303
sdot 119891119886119897 (1198902 120572 120575)
(12)
We propose the following nonlinear function
119891119886119897 (120576 120572 120575) = |120576|120572 sdot sgn (120576) |120576| gt 1205751205761205751minus120572 |120576| le 120575 (13)
RBF neural network has a three-layer feedforward net-work It simulates the partial adjustment in the humanbrain and the receptive field The activation functions of theneurons in the hidden layer are nonlinear functions And theactivation functions of the neurons in the output layer arelinear functions So the learning speed could be acceleratedand the local minimum problem could be avoided
Three-layer RBF neural networkrsquos block diagram isdesigned in this paper as shown in Figure 3
In the structure of the RBF neural network X =[1198831 1198832 119883119897] is the input vector of the neural network andthe radial basis vector of the neural network is
ℎ119895 = exp(10038171003817100381710038171003817X minus c119895
1003817100381710038171003817100381721198892119895 ) 119895 = 1 2 119899 (14)
where 119889119895 represents the base width parameter and c119895 =[1198881198951 1198881198952 119888119895119897]denotes the center vector of the jth node in thehidden layer The neural network output of the identificationcould be represented as follows
119910119899 (119896) = 1199081ℎ1 + 1199082ℎ2 + sdot sdot sdot + 119908119899ℎ119899 (15)
Discrete Dynamics in Nature and Society 5
u(k)
y(k)
k
hj
wn
yn
Input layer
Hidden layer (7 neurons)
Output layer
sum
w1119894119895
Figure 3 Block diagram of the RBF neural network optimization
According to the principle of the gradient descent theiteration algorithm to calculate the variation of the weightof the output layer the center node and the node basedparameters could be expressed as
119908119895 (119896) = 119908119895 (119896 minus 1) + Δ119908119895 (119896)+ 120572 (119908119895 (119896 minus 1) minus 119908119895 (119896 minus 2))
119887119895 (119896) = 119887119895 (119896 minus 1) + Δ119887119895+ 120572 (119887119895 (119896 minus 1) minus 119887119895 (119896 minus 2))
119888119895119894 (119896) = 119888119895119894 (119896 minus 1) + Δ119888119895119894 (119896)+ 120572 (119888119895119894 (119896 minus 1) minus 119888119895119894 (119896 minus 2))
Δ119908119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) ℎ119895Δ119889119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896))
10038171003817100381710038171003817X minus c11989510038171003817100381710038171003817221198892119895
Δ119888119895119897 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) 119908119895119883119895 minus 1198881198951198941198892119895
(16)
where 120572 is the momentum factor and 120578 is the learning rateThe setting indicator of the neural network is expressed as
119864 (119896) = 12 (V (119896) minus 119910 (119896))2 (17)
where V(119896) and 119910(119896) are position command signal and theposition response signal
Table 1 Major specification data
Parameters QuantityVoltage (V) 482Maximum current (A) 65Inductance (mH) 23Resistor (Ω) 51Coefficient of the force (NA) 24Frequency of the PWM (Hz) 50Full stroke (mm) plusmn12Rated thrust force of the motor (N) 79Quality of the moving coil (kg) 011Hydraulic pressure (MPa) 25
The adjustment of 12057301 12057302 and 12057303 utilizes the gradientdescent method which could be represented as
Δ12057301 = minus120578 12059711986412059712057301 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057301
Δ12057302 = minus120578 12059711986412059712057302 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057302
Δ12057303 = minus120578 12059711986412059712057303 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057303
(18)
The diagram of the control algorithm (RBF-ESO) pro-posed in this paper is shown in Figure 4
4 Experiments
To confirm the precision and practicability of the proposedcontrol method for the LM-DDA system the system was firstbuilt using MATLABSimulink The simulation experimentwas done on the PID control the RBF neural network PIDcontrol and the proposed algorithm in Section 3 on the LM-DDA system The results of the PID control the RBF neuralnetwork PID control (RBF-PID) and theRBFneural networkcontrol based on the extended state observer (RBF-ESO)werecompared
We choose 120578 = 0015 and 120572 = 085 for supervised learn-ing Figure 5 shows the learning curve of the RBF modelThis figure denotes the mean squared error (MSE) along thetraining step From the figure we could see that the con-vergence effects could be reached
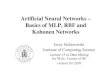
The major specification data are listed in Table 1It is clearly seen in Figure 6 that the settling process of
the system is more time-consuming (323ms) while utilizingclassic PID control strategyWhile applying the RBF-PID theovershoot is weakened and the systemrsquos settling time is short-ened by comparison to the PID control In contrast the set-tling time is the shortest (181ms) when the proposed controlstrategy (RBF-ESO) is applied And the DDA system almosthas no overshoot and vibration while applying the algorithm
There are such uncertainties that the mechanical charac-teristics might change when the actuator is running Figures7(a)ndash7(c) show the command and the positon response ofthe DDA system when the quality shifts during the working
6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
reasoningThebasic idea is to experience expert control of thecontrolled object into a series of control rules Fuzzy controldoes not rely on the specific mathematical model of the plantso its applicable scope is wide and it is easy to be achievedby using digital controller when the nonlinear time varyingload has certain robustness Although fuzzy control strategiesimprove the intelligence they simply use more control rulesIn this case much expert experience is needed to settle therules So the control accuracy is relatively low without theexpert experience
Artificial neural network [14 15] has the advantages ofdistributed storage parallel processing nonlinear approxi-mation and self-learning So it shows a broad applicationprospect in the field of linear servo control ESO is borrowedfrom the idea of state observer [16] and it would be ableto affect the output of the controlled object disturbanceexpansion into a new state variable The establishment ofstate variables can be observed with the expansion of theobserver with a special feedback mechanism ESO distur-bance generated does not depend on the specific model anddoes not need to directly measure the role of disturbancesThe algorithm could be written as a discrete form and italso has the advantages of having a simple structure havinga small amount of calculation being easy to implement andbeing a real-time digital controller Therefore ESO is a moreversatile and practical disturbance observer [17]
The remainder of this paper is organized as follows InSection 2 the model of a DDA system is established andhow hydraulic power has a bad effect on the control of LM isanalyzed Section 3 introduces ESO into the control systemThe optimal parameters in position controller are obtained byminimizing the energy gain between the spool position andthe modeling error And the method is implemented by animproved back-propagation algorithm with the weight bal-ance Research experiment process is presented in Section 4where a novel hardware structure of LM-DDA control basedon digital signal processor (DSP) and field programmablegate array (FPGA) is given
2 Modeling of Direct Drive Actuator Systemwith Linear Motor
Figure 1 shows the structure of a DDA systemAs is shown in Figure 1 in the LM-DDA system the
linear motor directly connects to the spool 119879 is the returnport 119860 and 119861 denote the two direction control ports and 119875represents the entrance port The intelligent controller of thespool receives position reference and feedback And it wouldgenerate the current command to drive the linear motor andcomplete the closed-loop control The force withstood by thespool includes thrust force steady-state fluid power and flowfluid power Since the body of the actuator is well lubricatedthe impact of the friction is ignored
The dynamic model of spool could be constructed as
119898119904 11988911990921199041198891199052 + 119861119904 119889119909V119889119905 + 119865119897 = 119865119904 (1)
where119898119904 represents the quality of the spool119909119904 is the displace-ment of the spool which could bemeasured by a displacement
sensor 119861119904 is the viscous damping coefficient of the spool and119865119897 denotes the disturbance of the spool which includes thetransient hydraulic force and steady hydraulic force
With Laplace transformation to (1) it can be drawn that
119909119904 (119904) = 11198981199041199042 + 119861119904119904 (119865119904 (119904) minus 119865119897 (119904)) (2)
The hydraulic force has great influence on the openingof the spool and would directly affect the flow of the valveand it should be considered As is mentioned above thehydraulic force includes the transient hydraulic force andsteady hydraulic force In general the steady hydraulic forceplays a main role The existence of the steady hydraulic forceincreases the driving force of the spool and could causevibration and nonlinear problem yet there is no mechanicalcompensation or pressure drop which would completelyeliminate the influence of the steady axial hydraulic force
The steady hydraulic force could be expressed as follows
119865st = minus2119862119881120596119883VΔ119901 cos 120579 (3)
The transient hydraulic force is
119865tr = 120588 (1198711 minus 1198712) 119862119881120596radic 2120588Δ119901119889119883V119889119905 (4)
where119883V is the area of dischargeΔ119901 exemplifies the pressurewhich drops across the outlet 120596 is the region gradient of theDDA (1198711minus1198712) is the length of the damper119862119881 represents thecoefficient of the volume 120579 denotes the angle of the flow and120588 is the density of the oil liquid
The existence of the axial hydraulic power increases thedriving force of the spool and it would cause the vibrationand nonlinear problem Due to the fact that the axialhydraulic power is related to the operation condition of theDDA it is difficult to achieve the real-time compensation offluid dynamics And this phenomenon could not be com-pletely eliminated Figure 2 illustrates the whole controllingprocess of the LM-DDA system Because the conventionalmethod could not meet the design requirement the parame-ters of the position control are first adjusted by the RBFneuralnetwork automatically and then the hydraulic disturbance isestimated by the ESO
3 The Proposed Control Scheme
ESO is borrowed from the ideas of the state observer it isable to get the new state variables from the disturbance func-tion that would influence the controlled output Special feed-back mechanism is established to observe the extended statevariables The basic mechanism of the ESO is that since thealleged output is observable the output signal contains theinformation about the disturbance So it could be extractedfrom the output In this paper ESO is used to establish themodel of the unknown external disturbance (unpredictablehydraulic force)
Discrete Dynamics in Nature and Society 3
Intelligentcontroller Current
Displacementsensor
Spool
Valvechamber
Coilwinding
Magnet
Spring
T A P B
Position reference
Position feedback
Figure 1 The structure of the DDA
Power converter Coil windingConstant of the
thrust forceLinear motor
Position loop Current loop
Digitalcontroller
Position-feedback constant
Current-feedback constantConstant ofback-EMF
Spool
XrefWp(s)
Iref(s)
+
+
+minusminusminusminus
Wi(s)Wpwm(s) Cf
Fi(s)
Ce
Fl(s)
Vm(s) 1
s
xs
mss2 + Bss
1
mm + Bm
120572
120573
U120581(s)
E120581(s)
I120581(s)1
L120581s + R120581
Figure 2 Block diagram of a double-loop intelligent controller
The high order model (order = 119899) can be expressed asfollows
1 = 11990922 = 1199093
119899minus1 = 119909119899
119899 = 119891 (119905 1199091 1199092 119909119899 119908) + 119887119906119910 = 1199091 + Λ
(5)
where119908 is external disturbance variable 119906 is control variable119891(119909 119909(119899minus1) 119905) is an uncertain plant and Λ representsthe output noise of the system
The state-space model of the system is given in thefollowing form
x (119905) = 119860x (119905) + 119861 (119891 (119905) + 119906 (119905)) 119910 (119905) = 119862119909 (119905) + Λ (119905) (6)
where 119860 = [[0 1 sdotsdotsdot sdotsdotsdot 00 0 1 sdotsdotsdot 0 d d d
0 sdotsdotsdot sdotsdotsdot 0 10 0 sdotsdotsdot sdotsdotsdot 0
]]119899times119899
119861 = [0 0 sdot sdot sdot 1 0]1198791times119899
119862 =[1 0 sdot sdot sdot sdot sdot sdot 0]
1times119899
Define 119909119899+1 = 119891(sdot) as the extended state of the systemdescribed in (6) and define x = [1199091 1199092 sdot sdot sdot 119909119899 119909119899+1]119879 asthe whole state of the system
So the extended state observer should be described as
119890 = 1199111 minus 1199101199111 = 2 + 1205721120576 (1199091 + Λ minus 1) 1199112 = 3 + 12057221205762 (1199091 + Λ minus 1)
119911119899 = 119899+1 + 1198870119906 + 120572119899120576119899 (1199091 + Λ minus 1)
119911119899+1 = 120572119899+1120576119899+1 (1199091 + Λ minus 1)
(7)
4 Discrete Dynamics in Nature and Society
where x = [1 2 sdot sdot sdot 119899 119899+1]119879 is the observable of x 119890 isthe tracking error of the ESO and 1198870 is the estimated value of119887 1205721 1205722 sdot sdot sdot 120572119899 120572119899+1 is the adjusting gain and 120576 is a smallpositive constant
Define M119879 = (1205721120576 12057221205762 sdot sdot sdot 120572119899120576119899 120572119899+1120576119899+1) as thegain vector In order to ensure the convergence of the ESO theroots of polynomial (8) should all be located on the negativeplane
119904119899+1 + 1205721119904119899 + sdot sdot sdot + 120572119899119904 + 120572119899+1 = 0 (8)
The existence of the output noise Λ would have a badinfluence on the performance of the ESO When the gain ofthe ESO is larger the tracking speed is faster but ESO wouldbemore sensitive to the influence of the output noiseΛ so inthis paper a switching rule is designed to tackle this problem
According to the characteristics of the ESO when thetracking error 119890 is large a small parameter M1119879 is selectedso as to estimate the system state and its uncertainty quicklyWhen the tracking error 119890 decreases to a certain value(meanwhile ESO tracks the state and the extended state ofthe system) a large parameter M2119879 is selected so that thesystemrsquos sensitivity to the noise could be reduced and the highfrequency of the noise could be filtered to some extent M1119879andM2119879 are
M1119879 = [12057211120576 120572121205762 sdot sdot sdot 1205721119899120576119899
1205721(119899+1)120576119899+1 ] M2119879 = [12057221120576 120572221205762 sdot sdot sdot 1205722119899120576119899
1205722(119899+1)120576119899+1 ] (9)
In order to avoid the duplicated switching of the proposedmethod a delay timer is used So the procedure of theswitching of the ESO is arranged as follows
(1) When |119890| gt 120597 the delay timer is reset and M1119879 isselected
(2) When |119890| isin [minus120597 120597] the delay timer is activated andM1119879 is still selected
(3) When the delay time is over meanwhile |119890| isin [minus120597 120597]and the gain of the ESO is switched toM2119879
Meanwhile 120597 determines the switching regionThe position loop is most related to the dynamic and
static performance of the DDA In the proposed schemenonlinear arrangement is used to attenuate the influence ofthe hydraulic force Tracking differentiator is arranged asfollows
119890 = V1 minus V0V1 = V1 + ℎ sdot V2V2 = V2 + ℎ sdot 119891st (119890 V2 1199030 ℎ)
(10)
where 119891st(1199091 1199092 119903 ℎ) is the most comprehensive function V1is the arranged transition of V0 and ℎ is the sampling period
The most comprehensive function 119891st(1199091 1199092 119903 ℎ) isexpressed as follows
119889 = 120575 sdot ℎ1198890 = ℎ sdot 119889119910 = 1199091 + ℎ sdot 11990921198860 = radic1198892 + 7119903 sdot 10038161003816100381610038161199101003816100381610038161003816
119886 = 1199092 + (1198860 minus 119889)2 sign (119910) 10038161003816100381610038161199101003816100381610038161003816 gt 11988901199092 + 119910ℎ 10038161003816100381610038161199101003816100381610038161003816 le 1198890
119891st = minus120575 sdot sign (119886) |119886| gt 119889120575119886119889 |119886| le 119889
(11)
where 120575 represents a coefficient which determines the track-ing speed
The nonlinear state feedback function is arranged asfollows
1198900 (120591) = int11990501198901 (120591) 119889120591
1198901 = V1 minus 11991111198902 = V2 minus 1199112119906 = 12057301 sdot 119891119886119897 (1198900 120572 120575) + 12057302 sdot 119891119886119897 (1198901 120572 120575) + 12057303
sdot 119891119886119897 (1198902 120572 120575)
(12)
We propose the following nonlinear function
119891119886119897 (120576 120572 120575) = |120576|120572 sdot sgn (120576) |120576| gt 1205751205761205751minus120572 |120576| le 120575 (13)
RBF neural network has a three-layer feedforward net-work It simulates the partial adjustment in the humanbrain and the receptive field The activation functions of theneurons in the hidden layer are nonlinear functions And theactivation functions of the neurons in the output layer arelinear functions So the learning speed could be acceleratedand the local minimum problem could be avoided
Three-layer RBF neural networkrsquos block diagram isdesigned in this paper as shown in Figure 3
In the structure of the RBF neural network X =[1198831 1198832 119883119897] is the input vector of the neural network andthe radial basis vector of the neural network is
ℎ119895 = exp(10038171003817100381710038171003817X minus c119895
1003817100381710038171003817100381721198892119895 ) 119895 = 1 2 119899 (14)
where 119889119895 represents the base width parameter and c119895 =[1198881198951 1198881198952 119888119895119897]denotes the center vector of the jth node in thehidden layer The neural network output of the identificationcould be represented as follows
119910119899 (119896) = 1199081ℎ1 + 1199082ℎ2 + sdot sdot sdot + 119908119899ℎ119899 (15)
Discrete Dynamics in Nature and Society 5
u(k)
y(k)
k
hj
wn
yn
Input layer
Hidden layer (7 neurons)
Output layer
sum
w1119894119895
Figure 3 Block diagram of the RBF neural network optimization
According to the principle of the gradient descent theiteration algorithm to calculate the variation of the weightof the output layer the center node and the node basedparameters could be expressed as
119908119895 (119896) = 119908119895 (119896 minus 1) + Δ119908119895 (119896)+ 120572 (119908119895 (119896 minus 1) minus 119908119895 (119896 minus 2))
119887119895 (119896) = 119887119895 (119896 minus 1) + Δ119887119895+ 120572 (119887119895 (119896 minus 1) minus 119887119895 (119896 minus 2))
119888119895119894 (119896) = 119888119895119894 (119896 minus 1) + Δ119888119895119894 (119896)+ 120572 (119888119895119894 (119896 minus 1) minus 119888119895119894 (119896 minus 2))
Δ119908119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) ℎ119895Δ119889119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896))
10038171003817100381710038171003817X minus c11989510038171003817100381710038171003817221198892119895
Δ119888119895119897 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) 119908119895119883119895 minus 1198881198951198941198892119895
(16)
where 120572 is the momentum factor and 120578 is the learning rateThe setting indicator of the neural network is expressed as
119864 (119896) = 12 (V (119896) minus 119910 (119896))2 (17)
where V(119896) and 119910(119896) are position command signal and theposition response signal
Table 1 Major specification data
Parameters QuantityVoltage (V) 482Maximum current (A) 65Inductance (mH) 23Resistor (Ω) 51Coefficient of the force (NA) 24Frequency of the PWM (Hz) 50Full stroke (mm) plusmn12Rated thrust force of the motor (N) 79Quality of the moving coil (kg) 011Hydraulic pressure (MPa) 25
The adjustment of 12057301 12057302 and 12057303 utilizes the gradientdescent method which could be represented as
Δ12057301 = minus120578 12059711986412059712057301 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057301
Δ12057302 = minus120578 12059711986412059712057302 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057302
Δ12057303 = minus120578 12059711986412059712057303 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057303
(18)
The diagram of the control algorithm (RBF-ESO) pro-posed in this paper is shown in Figure 4
4 Experiments
To confirm the precision and practicability of the proposedcontrol method for the LM-DDA system the system was firstbuilt using MATLABSimulink The simulation experimentwas done on the PID control the RBF neural network PIDcontrol and the proposed algorithm in Section 3 on the LM-DDA system The results of the PID control the RBF neuralnetwork PID control (RBF-PID) and theRBFneural networkcontrol based on the extended state observer (RBF-ESO)werecompared
We choose 120578 = 0015 and 120572 = 085 for supervised learn-ing Figure 5 shows the learning curve of the RBF modelThis figure denotes the mean squared error (MSE) along thetraining step From the figure we could see that the con-vergence effects could be reached
The major specification data are listed in Table 1It is clearly seen in Figure 6 that the settling process of
the system is more time-consuming (323ms) while utilizingclassic PID control strategyWhile applying the RBF-PID theovershoot is weakened and the systemrsquos settling time is short-ened by comparison to the PID control In contrast the set-tling time is the shortest (181ms) when the proposed controlstrategy (RBF-ESO) is applied And the DDA system almosthas no overshoot and vibration while applying the algorithm
There are such uncertainties that the mechanical charac-teristics might change when the actuator is running Figures7(a)ndash7(c) show the command and the positon response ofthe DDA system when the quality shifts during the working
6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
Intelligentcontroller Current
Displacementsensor
Spool
Valvechamber
Coilwinding
Magnet
Spring
T A P B
Position reference
Position feedback
Figure 1 The structure of the DDA
Power converter Coil windingConstant of the
thrust forceLinear motor
Position loop Current loop
Digitalcontroller
Position-feedback constant
Current-feedback constantConstant ofback-EMF
Spool
XrefWp(s)
Iref(s)
+
+
+minusminusminusminus
Wi(s)Wpwm(s) Cf
Fi(s)
Ce
Fl(s)
Vm(s) 1
s
xs
mss2 + Bss
1
mm + Bm
120572
120573
U120581(s)
E120581(s)
I120581(s)1
L120581s + R120581
Figure 2 Block diagram of a double-loop intelligent controller
The high order model (order = 119899) can be expressed asfollows
1 = 11990922 = 1199093
119899minus1 = 119909119899
119899 = 119891 (119905 1199091 1199092 119909119899 119908) + 119887119906119910 = 1199091 + Λ
(5)
where119908 is external disturbance variable 119906 is control variable119891(119909 119909(119899minus1) 119905) is an uncertain plant and Λ representsthe output noise of the system
The state-space model of the system is given in thefollowing form
x (119905) = 119860x (119905) + 119861 (119891 (119905) + 119906 (119905)) 119910 (119905) = 119862119909 (119905) + Λ (119905) (6)
where 119860 = [[0 1 sdotsdotsdot sdotsdotsdot 00 0 1 sdotsdotsdot 0 d d d
0 sdotsdotsdot sdotsdotsdot 0 10 0 sdotsdotsdot sdotsdotsdot 0
]]119899times119899
119861 = [0 0 sdot sdot sdot 1 0]1198791times119899
119862 =[1 0 sdot sdot sdot sdot sdot sdot 0]
1times119899
Define 119909119899+1 = 119891(sdot) as the extended state of the systemdescribed in (6) and define x = [1199091 1199092 sdot sdot sdot 119909119899 119909119899+1]119879 asthe whole state of the system
So the extended state observer should be described as
119890 = 1199111 minus 1199101199111 = 2 + 1205721120576 (1199091 + Λ minus 1) 1199112 = 3 + 12057221205762 (1199091 + Λ minus 1)
119911119899 = 119899+1 + 1198870119906 + 120572119899120576119899 (1199091 + Λ minus 1)
119911119899+1 = 120572119899+1120576119899+1 (1199091 + Λ minus 1)
(7)
4 Discrete Dynamics in Nature and Society
where x = [1 2 sdot sdot sdot 119899 119899+1]119879 is the observable of x 119890 isthe tracking error of the ESO and 1198870 is the estimated value of119887 1205721 1205722 sdot sdot sdot 120572119899 120572119899+1 is the adjusting gain and 120576 is a smallpositive constant
Define M119879 = (1205721120576 12057221205762 sdot sdot sdot 120572119899120576119899 120572119899+1120576119899+1) as thegain vector In order to ensure the convergence of the ESO theroots of polynomial (8) should all be located on the negativeplane
119904119899+1 + 1205721119904119899 + sdot sdot sdot + 120572119899119904 + 120572119899+1 = 0 (8)
The existence of the output noise Λ would have a badinfluence on the performance of the ESO When the gain ofthe ESO is larger the tracking speed is faster but ESO wouldbemore sensitive to the influence of the output noiseΛ so inthis paper a switching rule is designed to tackle this problem
According to the characteristics of the ESO when thetracking error 119890 is large a small parameter M1119879 is selectedso as to estimate the system state and its uncertainty quicklyWhen the tracking error 119890 decreases to a certain value(meanwhile ESO tracks the state and the extended state ofthe system) a large parameter M2119879 is selected so that thesystemrsquos sensitivity to the noise could be reduced and the highfrequency of the noise could be filtered to some extent M1119879andM2119879 are
M1119879 = [12057211120576 120572121205762 sdot sdot sdot 1205721119899120576119899
1205721(119899+1)120576119899+1 ] M2119879 = [12057221120576 120572221205762 sdot sdot sdot 1205722119899120576119899
1205722(119899+1)120576119899+1 ] (9)
In order to avoid the duplicated switching of the proposedmethod a delay timer is used So the procedure of theswitching of the ESO is arranged as follows
(1) When |119890| gt 120597 the delay timer is reset and M1119879 isselected
(2) When |119890| isin [minus120597 120597] the delay timer is activated andM1119879 is still selected
(3) When the delay time is over meanwhile |119890| isin [minus120597 120597]and the gain of the ESO is switched toM2119879
Meanwhile 120597 determines the switching regionThe position loop is most related to the dynamic and
static performance of the DDA In the proposed schemenonlinear arrangement is used to attenuate the influence ofthe hydraulic force Tracking differentiator is arranged asfollows
119890 = V1 minus V0V1 = V1 + ℎ sdot V2V2 = V2 + ℎ sdot 119891st (119890 V2 1199030 ℎ)
(10)
where 119891st(1199091 1199092 119903 ℎ) is the most comprehensive function V1is the arranged transition of V0 and ℎ is the sampling period
The most comprehensive function 119891st(1199091 1199092 119903 ℎ) isexpressed as follows
119889 = 120575 sdot ℎ1198890 = ℎ sdot 119889119910 = 1199091 + ℎ sdot 11990921198860 = radic1198892 + 7119903 sdot 10038161003816100381610038161199101003816100381610038161003816
119886 = 1199092 + (1198860 minus 119889)2 sign (119910) 10038161003816100381610038161199101003816100381610038161003816 gt 11988901199092 + 119910ℎ 10038161003816100381610038161199101003816100381610038161003816 le 1198890
119891st = minus120575 sdot sign (119886) |119886| gt 119889120575119886119889 |119886| le 119889
(11)
where 120575 represents a coefficient which determines the track-ing speed
The nonlinear state feedback function is arranged asfollows
1198900 (120591) = int11990501198901 (120591) 119889120591
1198901 = V1 minus 11991111198902 = V2 minus 1199112119906 = 12057301 sdot 119891119886119897 (1198900 120572 120575) + 12057302 sdot 119891119886119897 (1198901 120572 120575) + 12057303
sdot 119891119886119897 (1198902 120572 120575)
(12)
We propose the following nonlinear function
119891119886119897 (120576 120572 120575) = |120576|120572 sdot sgn (120576) |120576| gt 1205751205761205751minus120572 |120576| le 120575 (13)
RBF neural network has a three-layer feedforward net-work It simulates the partial adjustment in the humanbrain and the receptive field The activation functions of theneurons in the hidden layer are nonlinear functions And theactivation functions of the neurons in the output layer arelinear functions So the learning speed could be acceleratedand the local minimum problem could be avoided
Three-layer RBF neural networkrsquos block diagram isdesigned in this paper as shown in Figure 3
In the structure of the RBF neural network X =[1198831 1198832 119883119897] is the input vector of the neural network andthe radial basis vector of the neural network is
ℎ119895 = exp(10038171003817100381710038171003817X minus c119895
1003817100381710038171003817100381721198892119895 ) 119895 = 1 2 119899 (14)
where 119889119895 represents the base width parameter and c119895 =[1198881198951 1198881198952 119888119895119897]denotes the center vector of the jth node in thehidden layer The neural network output of the identificationcould be represented as follows
119910119899 (119896) = 1199081ℎ1 + 1199082ℎ2 + sdot sdot sdot + 119908119899ℎ119899 (15)
Discrete Dynamics in Nature and Society 5
u(k)
y(k)
k
hj
wn
yn
Input layer
Hidden layer (7 neurons)
Output layer
sum
w1119894119895
Figure 3 Block diagram of the RBF neural network optimization
According to the principle of the gradient descent theiteration algorithm to calculate the variation of the weightof the output layer the center node and the node basedparameters could be expressed as
119908119895 (119896) = 119908119895 (119896 minus 1) + Δ119908119895 (119896)+ 120572 (119908119895 (119896 minus 1) minus 119908119895 (119896 minus 2))
119887119895 (119896) = 119887119895 (119896 minus 1) + Δ119887119895+ 120572 (119887119895 (119896 minus 1) minus 119887119895 (119896 minus 2))
119888119895119894 (119896) = 119888119895119894 (119896 minus 1) + Δ119888119895119894 (119896)+ 120572 (119888119895119894 (119896 minus 1) minus 119888119895119894 (119896 minus 2))
Δ119908119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) ℎ119895Δ119889119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896))
10038171003817100381710038171003817X minus c11989510038171003817100381710038171003817221198892119895
Δ119888119895119897 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) 119908119895119883119895 minus 1198881198951198941198892119895
(16)
where 120572 is the momentum factor and 120578 is the learning rateThe setting indicator of the neural network is expressed as
119864 (119896) = 12 (V (119896) minus 119910 (119896))2 (17)
where V(119896) and 119910(119896) are position command signal and theposition response signal
Table 1 Major specification data
Parameters QuantityVoltage (V) 482Maximum current (A) 65Inductance (mH) 23Resistor (Ω) 51Coefficient of the force (NA) 24Frequency of the PWM (Hz) 50Full stroke (mm) plusmn12Rated thrust force of the motor (N) 79Quality of the moving coil (kg) 011Hydraulic pressure (MPa) 25
The adjustment of 12057301 12057302 and 12057303 utilizes the gradientdescent method which could be represented as
Δ12057301 = minus120578 12059711986412059712057301 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057301
Δ12057302 = minus120578 12059711986412059712057302 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057302
Δ12057303 = minus120578 12059711986412059712057303 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057303
(18)
The diagram of the control algorithm (RBF-ESO) pro-posed in this paper is shown in Figure 4
4 Experiments
To confirm the precision and practicability of the proposedcontrol method for the LM-DDA system the system was firstbuilt using MATLABSimulink The simulation experimentwas done on the PID control the RBF neural network PIDcontrol and the proposed algorithm in Section 3 on the LM-DDA system The results of the PID control the RBF neuralnetwork PID control (RBF-PID) and theRBFneural networkcontrol based on the extended state observer (RBF-ESO)werecompared
We choose 120578 = 0015 and 120572 = 085 for supervised learn-ing Figure 5 shows the learning curve of the RBF modelThis figure denotes the mean squared error (MSE) along thetraining step From the figure we could see that the con-vergence effects could be reached
The major specification data are listed in Table 1It is clearly seen in Figure 6 that the settling process of
the system is more time-consuming (323ms) while utilizingclassic PID control strategyWhile applying the RBF-PID theovershoot is weakened and the systemrsquos settling time is short-ened by comparison to the PID control In contrast the set-tling time is the shortest (181ms) when the proposed controlstrategy (RBF-ESO) is applied And the DDA system almosthas no overshoot and vibration while applying the algorithm
There are such uncertainties that the mechanical charac-teristics might change when the actuator is running Figures7(a)ndash7(c) show the command and the positon response ofthe DDA system when the quality shifts during the working
6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
where x = [1 2 sdot sdot sdot 119899 119899+1]119879 is the observable of x 119890 isthe tracking error of the ESO and 1198870 is the estimated value of119887 1205721 1205722 sdot sdot sdot 120572119899 120572119899+1 is the adjusting gain and 120576 is a smallpositive constant
Define M119879 = (1205721120576 12057221205762 sdot sdot sdot 120572119899120576119899 120572119899+1120576119899+1) as thegain vector In order to ensure the convergence of the ESO theroots of polynomial (8) should all be located on the negativeplane
119904119899+1 + 1205721119904119899 + sdot sdot sdot + 120572119899119904 + 120572119899+1 = 0 (8)
The existence of the output noise Λ would have a badinfluence on the performance of the ESO When the gain ofthe ESO is larger the tracking speed is faster but ESO wouldbemore sensitive to the influence of the output noiseΛ so inthis paper a switching rule is designed to tackle this problem
According to the characteristics of the ESO when thetracking error 119890 is large a small parameter M1119879 is selectedso as to estimate the system state and its uncertainty quicklyWhen the tracking error 119890 decreases to a certain value(meanwhile ESO tracks the state and the extended state ofthe system) a large parameter M2119879 is selected so that thesystemrsquos sensitivity to the noise could be reduced and the highfrequency of the noise could be filtered to some extent M1119879andM2119879 are
M1119879 = [12057211120576 120572121205762 sdot sdot sdot 1205721119899120576119899
1205721(119899+1)120576119899+1 ] M2119879 = [12057221120576 120572221205762 sdot sdot sdot 1205722119899120576119899
1205722(119899+1)120576119899+1 ] (9)
In order to avoid the duplicated switching of the proposedmethod a delay timer is used So the procedure of theswitching of the ESO is arranged as follows
(1) When |119890| gt 120597 the delay timer is reset and M1119879 isselected
(2) When |119890| isin [minus120597 120597] the delay timer is activated andM1119879 is still selected
(3) When the delay time is over meanwhile |119890| isin [minus120597 120597]and the gain of the ESO is switched toM2119879
Meanwhile 120597 determines the switching regionThe position loop is most related to the dynamic and
static performance of the DDA In the proposed schemenonlinear arrangement is used to attenuate the influence ofthe hydraulic force Tracking differentiator is arranged asfollows
119890 = V1 minus V0V1 = V1 + ℎ sdot V2V2 = V2 + ℎ sdot 119891st (119890 V2 1199030 ℎ)
(10)
where 119891st(1199091 1199092 119903 ℎ) is the most comprehensive function V1is the arranged transition of V0 and ℎ is the sampling period
The most comprehensive function 119891st(1199091 1199092 119903 ℎ) isexpressed as follows
119889 = 120575 sdot ℎ1198890 = ℎ sdot 119889119910 = 1199091 + ℎ sdot 11990921198860 = radic1198892 + 7119903 sdot 10038161003816100381610038161199101003816100381610038161003816
119886 = 1199092 + (1198860 minus 119889)2 sign (119910) 10038161003816100381610038161199101003816100381610038161003816 gt 11988901199092 + 119910ℎ 10038161003816100381610038161199101003816100381610038161003816 le 1198890
119891st = minus120575 sdot sign (119886) |119886| gt 119889120575119886119889 |119886| le 119889
(11)
where 120575 represents a coefficient which determines the track-ing speed
The nonlinear state feedback function is arranged asfollows
1198900 (120591) = int11990501198901 (120591) 119889120591
1198901 = V1 minus 11991111198902 = V2 minus 1199112119906 = 12057301 sdot 119891119886119897 (1198900 120572 120575) + 12057302 sdot 119891119886119897 (1198901 120572 120575) + 12057303
sdot 119891119886119897 (1198902 120572 120575)
(12)
We propose the following nonlinear function
119891119886119897 (120576 120572 120575) = |120576|120572 sdot sgn (120576) |120576| gt 1205751205761205751minus120572 |120576| le 120575 (13)
RBF neural network has a three-layer feedforward net-work It simulates the partial adjustment in the humanbrain and the receptive field The activation functions of theneurons in the hidden layer are nonlinear functions And theactivation functions of the neurons in the output layer arelinear functions So the learning speed could be acceleratedand the local minimum problem could be avoided
Three-layer RBF neural networkrsquos block diagram isdesigned in this paper as shown in Figure 3
In the structure of the RBF neural network X =[1198831 1198832 119883119897] is the input vector of the neural network andthe radial basis vector of the neural network is
ℎ119895 = exp(10038171003817100381710038171003817X minus c119895
1003817100381710038171003817100381721198892119895 ) 119895 = 1 2 119899 (14)
where 119889119895 represents the base width parameter and c119895 =[1198881198951 1198881198952 119888119895119897]denotes the center vector of the jth node in thehidden layer The neural network output of the identificationcould be represented as follows
119910119899 (119896) = 1199081ℎ1 + 1199082ℎ2 + sdot sdot sdot + 119908119899ℎ119899 (15)
Discrete Dynamics in Nature and Society 5
u(k)
y(k)
k
hj
wn
yn
Input layer
Hidden layer (7 neurons)
Output layer
sum
w1119894119895
Figure 3 Block diagram of the RBF neural network optimization
According to the principle of the gradient descent theiteration algorithm to calculate the variation of the weightof the output layer the center node and the node basedparameters could be expressed as
119908119895 (119896) = 119908119895 (119896 minus 1) + Δ119908119895 (119896)+ 120572 (119908119895 (119896 minus 1) minus 119908119895 (119896 minus 2))
119887119895 (119896) = 119887119895 (119896 minus 1) + Δ119887119895+ 120572 (119887119895 (119896 minus 1) minus 119887119895 (119896 minus 2))
119888119895119894 (119896) = 119888119895119894 (119896 minus 1) + Δ119888119895119894 (119896)+ 120572 (119888119895119894 (119896 minus 1) minus 119888119895119894 (119896 minus 2))
Δ119908119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) ℎ119895Δ119889119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896))
10038171003817100381710038171003817X minus c11989510038171003817100381710038171003817221198892119895
Δ119888119895119897 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) 119908119895119883119895 minus 1198881198951198941198892119895
(16)
where 120572 is the momentum factor and 120578 is the learning rateThe setting indicator of the neural network is expressed as
119864 (119896) = 12 (V (119896) minus 119910 (119896))2 (17)
where V(119896) and 119910(119896) are position command signal and theposition response signal
Table 1 Major specification data
Parameters QuantityVoltage (V) 482Maximum current (A) 65Inductance (mH) 23Resistor (Ω) 51Coefficient of the force (NA) 24Frequency of the PWM (Hz) 50Full stroke (mm) plusmn12Rated thrust force of the motor (N) 79Quality of the moving coil (kg) 011Hydraulic pressure (MPa) 25
The adjustment of 12057301 12057302 and 12057303 utilizes the gradientdescent method which could be represented as
Δ12057301 = minus120578 12059711986412059712057301 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057301
Δ12057302 = minus120578 12059711986412059712057302 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057302
Δ12057303 = minus120578 12059711986412059712057303 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057303
(18)
The diagram of the control algorithm (RBF-ESO) pro-posed in this paper is shown in Figure 4
4 Experiments
To confirm the precision and practicability of the proposedcontrol method for the LM-DDA system the system was firstbuilt using MATLABSimulink The simulation experimentwas done on the PID control the RBF neural network PIDcontrol and the proposed algorithm in Section 3 on the LM-DDA system The results of the PID control the RBF neuralnetwork PID control (RBF-PID) and theRBFneural networkcontrol based on the extended state observer (RBF-ESO)werecompared
We choose 120578 = 0015 and 120572 = 085 for supervised learn-ing Figure 5 shows the learning curve of the RBF modelThis figure denotes the mean squared error (MSE) along thetraining step From the figure we could see that the con-vergence effects could be reached
The major specification data are listed in Table 1It is clearly seen in Figure 6 that the settling process of
the system is more time-consuming (323ms) while utilizingclassic PID control strategyWhile applying the RBF-PID theovershoot is weakened and the systemrsquos settling time is short-ened by comparison to the PID control In contrast the set-tling time is the shortest (181ms) when the proposed controlstrategy (RBF-ESO) is applied And the DDA system almosthas no overshoot and vibration while applying the algorithm
There are such uncertainties that the mechanical charac-teristics might change when the actuator is running Figures7(a)ndash7(c) show the command and the positon response ofthe DDA system when the quality shifts during the working
6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
u(k)
y(k)
k
hj
wn
yn
Input layer
Hidden layer (7 neurons)
Output layer
sum
w1119894119895
Figure 3 Block diagram of the RBF neural network optimization
According to the principle of the gradient descent theiteration algorithm to calculate the variation of the weightof the output layer the center node and the node basedparameters could be expressed as
119908119895 (119896) = 119908119895 (119896 minus 1) + Δ119908119895 (119896)+ 120572 (119908119895 (119896 minus 1) minus 119908119895 (119896 minus 2))
119887119895 (119896) = 119887119895 (119896 minus 1) + Δ119887119895+ 120572 (119887119895 (119896 minus 1) minus 119887119895 (119896 minus 2))
119888119895119894 (119896) = 119888119895119894 (119896 minus 1) + Δ119888119895119894 (119896)+ 120572 (119888119895119894 (119896 minus 1) minus 119888119895119894 (119896 minus 2))
Δ119908119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) ℎ119895Δ119889119895 (119896) = 120578 (119910 (119896) minus 119910119899 (119896))
10038171003817100381710038171003817X minus c11989510038171003817100381710038171003817221198892119895
Δ119888119895119897 (119896) = 120578 (119910 (119896) minus 119910119899 (119896)) 119908119895119883119895 minus 1198881198951198941198892119895
(16)
where 120572 is the momentum factor and 120578 is the learning rateThe setting indicator of the neural network is expressed as
119864 (119896) = 12 (V (119896) minus 119910 (119896))2 (17)
where V(119896) and 119910(119896) are position command signal and theposition response signal
Table 1 Major specification data
Parameters QuantityVoltage (V) 482Maximum current (A) 65Inductance (mH) 23Resistor (Ω) 51Coefficient of the force (NA) 24Frequency of the PWM (Hz) 50Full stroke (mm) plusmn12Rated thrust force of the motor (N) 79Quality of the moving coil (kg) 011Hydraulic pressure (MPa) 25
The adjustment of 12057301 12057302 and 12057303 utilizes the gradientdescent method which could be represented as
Δ12057301 = minus120578 12059711986412059712057301 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057301
Δ12057302 = minus120578 12059711986412059712057302 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057302
Δ12057303 = minus120578 12059711986412059712057303 = minus120578120597119864120597119910 120597119910120597Δ119906 120597Δ11990612059712057303
(18)
The diagram of the control algorithm (RBF-ESO) pro-posed in this paper is shown in Figure 4
4 Experiments
To confirm the precision and practicability of the proposedcontrol method for the LM-DDA system the system was firstbuilt using MATLABSimulink The simulation experimentwas done on the PID control the RBF neural network PIDcontrol and the proposed algorithm in Section 3 on the LM-DDA system The results of the PID control the RBF neuralnetwork PID control (RBF-PID) and theRBFneural networkcontrol based on the extended state observer (RBF-ESO)werecompared
We choose 120578 = 0015 and 120572 = 085 for supervised learn-ing Figure 5 shows the learning curve of the RBF modelThis figure denotes the mean squared error (MSE) along thetraining step From the figure we could see that the con-vergence effects could be reached
The major specification data are listed in Table 1It is clearly seen in Figure 6 that the settling process of
the system is more time-consuming (323ms) while utilizingclassic PID control strategyWhile applying the RBF-PID theovershoot is weakened and the systemrsquos settling time is short-ened by comparison to the PID control In contrast the set-tling time is the shortest (181ms) when the proposed controlstrategy (RBF-ESO) is applied And the DDA system almosthas no overshoot and vibration while applying the algorithm
There are such uncertainties that the mechanical charac-teristics might change when the actuator is running Figures7(a)ndash7(c) show the command and the positon response ofthe DDA system when the quality shifts during the working
6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
TD
NF Plant
RBF neuralnetwork
Self-tuning of
ESO
1 +
+
+
+
minus
minus
minus
minus
2
z0z1
z2
e0
e1
e2
1b b
uy
yn
w
int
12057301 12057302 and 12057303
Figure 4 Control diagram of the RBF-ESO algorithm proposed in this paper
Learning curve
0 20 30 40 50 60 70 8010Training step
0005
01015
02025
03035
04045
05
MSE
Figure 5 The learning curve of the RBF neural network
process (119898119898 = 011 kg)The figures validate the notion that theRBF-ESO control scheme shows the best robustness Com-pared to the PID control method and the RBF-PID controlmethod the trajectory curve shows only little differencewhenthe quantity doubles
Figure 8 shows the systemrsquos hardware structure basedon the TMS28335 DSP and EP2C35F672C6 FPGA And theexperimental setup is shown in Figure 9
There are two loops in the LM-DDA control system theposition loop and the current loop The calculation of theposition loop is accomplished by the DSP and the calculationof the current loop is realized in the FPGA The proposedcontrol strategy is fulfilled in the position loopThus the DSPwould be concentrated on the calculation of the proposedalgorithm
A simulation testing VHDL code after compiling andgenerating the configuration file is done and then the datais downloaded to the FPGA Since the linear motor is usedfor coreless motors the winding inductance is small thusincreasing the difficulty of current control In this case ashort cycle (20120583s) of the current loop calculation is used inthe system in order to achieve the good effect of the currentcontrol The current loop controller uses the configuration ofFPGA which would have a simple structure control speedand high reliability
A displacement sensor is set up to get the positionfeedback signal Then this signal is transmitted to the FPGAand then is transmitted to the DSP The position referencesent from DSP is sent to the FPGA through the sequentialportThe power drive circuit is connected directly to the LM
Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
001 002 003 004 005 006 007 008 009 010Time (s)
Position referencePID
RBF-PIDRBF-ESO
Figure 6 Tracking of position step response by different algorithms
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
PID (m = m0)
PID (m = 2m0)
(a)
0
01
02
03
04
05
06
07D
ispla
cem
ent (
mm
)
001 002 003 004 005 006 007 008 009 010Time (s)
RBF-PID (m = m0)
RBF-PID (m = 2m0)
(b)
001 002 003 004 005 006 007 008 009 010Time (s)
0
01
02
03
04
05
06
07
Disp
lace
men
t (m
m)
RBF-ESO (m = m0)
RBF-ESO (m = 2m0)
(c)
Figure 7 Robustness of different algorithms to diversification of the mechanical characteristic
8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
MOSTETsADum4160
Linear motor Direct driveactuator
Hydraulicoil source
DSPTMS283
35
EP2C35F672
C6
Fast 14Bit ADAD7865
Signalconditioning
circuit
Digital controller Signal detection circuit
PWM signal
Currentfeedback
Actualtrajectory
Desiredtrajectory
DC powersupply
Power converter
minus
+
+
Figure 8 Schematic of system implementation
Linear motor
LM-DDAPositionsensor
Figure 9 Experimental setup of the LM-DDA system
and it receives the PWM signal generated by the FPGA andtransforms it into 2-bridge power gate The power circuit iscomposed of two parts the isolated circuit and the full bridgeinverter circuit And the overcurrent fortification functionis also realized by the FPGA The experiments of the DDAsystem are accomplished according to Figures 10 and 11
Figure 10(a) shows the results of the tracking waveform ofthe PID control and the proposed scheme Fluid power andother disturbances on the system would have great influenceon the tracking performance while using the PID controlAs is shown in Figure 10(b) the LM-DDA system couldattenuate the influence of the fluid power and other loaddisturbances while using the RBF-PID control but the systemstill has overshoot and vibration due to the unpredictablehydraulic force From Figure 10(c) we could see that theposition tracking is fast and there is almost no overshootwhile applying the strategy of RBF-ESO
Figure 11 shows the LM-DDA waveforms while trackingthe 100Hz sine wave when the proposed control strategy(RBF-ESO) is employed It shows the rapid response of
the system while applying the proposed RBF-ESO controlmethod
The experimental results on the LM-DDA system indicatethat the strategy proposed can effectively overcome the influ-ence of fluid power load on the system performance Despitethe influence of the fluid power and load disturbance thesystem canmaintain good stability and dynamic performanceand would meet the system requirements
5 Conclusions
The load disturbances in a linear motor-direct drive actuator(LM-DDA) have great influence on the system performanceA mathematical model of the LM-DDA system is establishedand a double-loop control system is presented An extendedstate observer (ESO) with switched gain was utilized toestimate the influence of the hydraulic power and other loaddisturbances Meanwhile RBF neural network was utilizedto optimize the parameters in this system Simulation andexperimental results demonstrated that the performancewith
Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(a)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position feedbackPosition reference
(b)
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (03 sdiv)
Position referencePosition feedback
(c)
Figure 10 Experimental results of square trajectory tracking (a) using conventional PID control (b) using RBF-PID method and (c) usingRBF-ESO method
Posit
ion
of th
e spo
ol (0
3m
md
iv)
Time (2msdiv)
Position referencePositionfeedback
Figure 11 Experimental results of the 100Hz sinusoid trajectorytracking using RBF-ESO method
rapid response and improved accuracy could be achieved bythe proposed control scheme
Competing Interests
The authors declare that there are no competing interestsregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China under Grant no 61273158
References
[1] S J FuM Liffring and I SMehdi ldquoIntegrated electro-hydrau-lic system modeling and analysisrdquo IEEE Aerospace and Elec-tronic Systems Magazine vol 17 no 7 pp 4ndash8 2002
[2] Z Yang Z He D Li J Yu X Cui and Z Zhao ldquoDirectdrive servo valve based on magnetostrictive actuator multi-coupled modeling and its compound control strategyrdquo Sensorsand Actuators A Physical vol 235 pp 119ndash130 2015
[3] B Na H Choi and K Kong ldquoDesign of a direct-drivenlinear actuator for a high-speed quadruped robot cheetaroid-Irdquo IEEEASME Transactions on Mechatronics vol 20 no 2 pp924ndash933 2015
[4] J Jeon C Han Y M Han and S B Choi ldquoA new type of adirect-drive valve system driven by a piezostack actuator andsliding spoolrdquo Smart Materials and Structures vol 23 no 7Article ID 075002 13 pages 2014
[5] H S Liu Y L Fu J Chen and H Chen ldquoActive disturbancerejection control in airborne direct drive electro mechanicalactuator applicationrdquo in Proceedings of the International Confer-ence on Design Manufacturing and Mechatronics (ICDMM rsquo14)pp 541ndash547 January 2014
[6] A Z Shukor and Y Fujimoto ldquoDirect-drive position control ofa spiral motor as a monoarticular actuatorrdquo IEEE Transactionson Industrial Electronics vol 61 no 2 pp 1063ndash1071 2014
[7] P A Toensmeier ldquoDirect-drive motor and nonlinear actuatorboost productivity of electric injection unitrdquo Plastics Engineer-ing vol 63 no 4 pp 38ndash40 2007
[8] H-T Yau Y-C Pu and S C Li ldquoAn FPGA-based PIDcontroller design for chaos synchronization by evolutionary
10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
programmingrdquo Discrete Dynamics in Nature and Society vol2011 Article ID 516031 11 pages 2011
[9] M C Razali N A Wahad P Balaguer M F Rahmat and SI Samsudin ldquoSingularly perturbation method applied to multi-variable PID controller designrdquoMathematical Problems in Engi-neering vol 2015 Article ID 818353 22 pages 2015
[10] K H Ang G Chong and Y Li ldquoPID control system analysisdesign and technologyrdquo IEEE Transactions on Control SystemsTechnology vol 13 no 4 pp 559ndash576 2005
[11] A Farag and H Werner ldquoStructure selection and tuning ofmulti-variable PID controllers for an industrial benchmarkproblemrdquo IEE Proceedings ControlTheory andApplications vol153 no 3 pp 262ndash267 2006
[12] Y Wu and J Wang ldquoContinuous recursive sliding mode con-trol for hypersonic flight vehicle with extended disturbanceobserverrdquo Mathematical Problems in Engineering vol 2015Article ID 506906 26 pages 2015
[13] L Zhao and Y M Jia ldquoNeural network-based adaptive con-sensus tracking control for multi-agent systems under actuatorfaultsrdquo International Journal of Systems Science vol 47 no 8 pp1931ndash1942 2016
[14] L Zhang K Li andE-W Bai ldquoAnew extension ofNewton algo-rithm for nonlinear system modelling using RBF neural net-worksrdquo IEEE Transactions on Automatic Control vol 58 no 11pp 2929ndash2933 2013
[15] Z Gao ldquoActive disturbance rejection control for nonlinear frac-tional-order systemsrdquo International Journal of Robust and Non-linear Control vol 26 no 4 pp 876ndash892 2016
[16] H Li X Q Liu and J Li ldquoThe research of Fuzzy ImmuneLinear Active Disturbance Rejection Control Strategy for three-motor synchronous systemrdquo Control Engineering and AppliedInformatics vol 17 no 4 pp 50ndash58 2015
[17] Z-L Zhao and B-Z Guo ldquoExtended state observer for uncer-tain lower triangular nonlinear systemsrdquo Systems and ControlLetters vol 85 pp 100ndash108 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of





![arXiv:1803.10091v1 [cs.CV] 27 Mar 2018 · RBF networks. RBF networks are a type of neural net-works that use RBF functions as an activation layer, see [29, 28]. This model was first](https://img.pdfslide.us/doc/110x75/5ec4d2b6bb6adc6f665f094b/arxiv180310091v1-cscv-27-mar-2018-rbf-networks-rbf-networks-are-a-type-of.jpg)