Embed Size (px)
Citation preview

Hindawi Publishing CorporationInternational Journal of Distributed Sensor NetworksVolume 2013 Article ID 129781 6 pageshttpdxdoiorg1011552013129781
Research ArticleOptimizing of Iterative Turbo Equalizer forUnderwater Sensor Communication
Ji Won Jung and Ki Man Kim
Department of Radio Communication Korea Maritime University Busan 606-791 Republic of Korea
Correspondence should be addressed to Ki Man Kim kimkimhhuackr
Received 14 August 2013 Accepted 18 November 2013
Academic Editor Dongkyun Kim
Copyright copy 2013 J W Jung and K M Kim This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
We presented an iterative turbo equalization to cope with intersymbol interference induced by reflection of sea level and sea bottomfor underwater sensor communication channel Iterative turbo equalizer consists of inner codes and outer codes we employdecision feedback equalizer as an outer code and turbo codes as an inner code Equalizer and decoder are connected throughthe interleaving and deinterleaving that update each otherrsquos information repeatedly At the receiver side we resort to powerfulturbo equalization algorithms that iteratively exchange probabilistic information between inner decoder and outer decoderthereby reducing the error rates significantly Furthermore we expand iterative turbo equalizer techniques for single-input-single-output (SISO) system to multiple-input-multiple-output (MIMO) system in order to increase data rates for underwater sensorcommunication channel Based on experimental channel response we confirmed that the performance is improved as iterationnumber is increased The performance is improved by 35 [dB] compared to noniteration for SISO channel and by 1 [dB] forMIMO channel respectively We also decided that optimal iterations are 3 Very important for a successful decoding is the channelestimation which is also discussed
1 Introduction
The excessive multipath encountered in underwater sen-sor communication (USC) channel is creating intersymbolinterference (ISI) which is limiting factor to achieve a highdata rate and bit error rate (BER) performance Variousdifferent methods to cope with multipath situation have beendeveloped In addition to ISI cochannel interference (CoI) isalso occurred resulting from the use of multiple transmittersin UW communication Removal of both CoI and ISI is achallenging problem in view of difficult channel conditionsThe optimal detector is a maximum likelihood detector(MLD) which can be realized for example by the softViterbialgorithm Due to the length of the impulse response in theUW channel the number of states in the decoder will beincreased One well-proven method to counteract ISI is thedecision feedback equalized (DFE) which has been used inmany UW communication links [1 2] However the use ofDFE has difficulties when a multipath with a number ofarrivals has equal strength or low SNR [3] The other way tocope with ISI iterative equalizer which constitutes an outer
loop is used in the receiver An inner loop consists of iterativedecoder The assembly utilizes the error correcting power ofthe iterative codes to get an efficient equalizer [4 5] Based oniterative turbo equalization technique for single-input-single-output (SISO) channel this paper expands it to the multiple-input-multiple-output (MIMO) channel for increasing datarates and capacity gains [6]
In this paper we study iterative coding-based equaliza-tion for single-carrier USC channel Among the iterativecoding schemes turbo codes and LDPC codes are dominantchannel coding schemes in recent studies [7ndash9] This paperdecides that turbo coding scheme is optimal for underwatercommunications system in aspect to performance packetsize and underwater environments As an outer code DFE isused in the paper As an inner code the turbo codes are usedIn MIMO system space-time trellis codes (STTCs) wereemployed as an inner code In receiver side BCJR algo-rithm is used for STTC decoding in order to improve BERperformance by increasing iterations This paper gives basictheory of iterative turbo equalization for SISO and MIMOsystems a description of our system and the result of some sea
2 International Journal of Distributed Sensor Networks
trials were conducted in the East Sea with an iterative turboequalizer
2 Iterative Turbo Equalizer forUSC Channel in the SISO System
Iterative turbo equalizer has better performance than the gen-eral equalizer However because of using a MAP (maximuma posteriori) algorithm it has the disadvantage of complexityby increasing exponentially as the length of the channelimpulse response [7] For this reason a low-complexity linearequalizer or DFE is used in order to reduce the complexityIn this paper we consider turbo equalizer with DFE Thebaseband model of turbo equalizer is shown in Figure 1
Figure 1 shows iterative linear equalizer that is decisionfeedback equalizer is used which constitutes an outer codeof the receiver An inner code consists of the turbo codesThe information to be transmitted was encoded by a rateof 13 turbo code with identical recursive encoders havingthe duobinary generator polynomial with 16 states [8] Theinterleavers are designed for good properties in a turbo codeand were taken from [10] The receiver of turbo equalizerconsists of equalizer and decoder Equalizer and decoder areconnected through the interleaving and deinterleaving thatupdate each otherrsquos information repeatedly The inner codedbits are then subtracted from the input and interleaved Theinterleaved output is canceled a posteriori from the proceed-ing received signal Interleaving helps receiver convergence
The 119871119868119890is output value of DFE as estimated extrinsic value
from received signal Let 119910[119896] be the equalizer input at time119896 then the output of the DFE at time 119896 119871119868
119890[119896] is given by
119871119868
119890[119896] =
119873119887minus1
sum
119894=0
119888119894 [119896] 119910 [119896 minus 119894] minus
119873119886
sum
119895=0
119887119895 [119896]
119868
119890[119896 minus 119895] (1)
where 119888119894[119896] (119894 = 0 1 119873
119888minus1) are the forward equalizer taps
at time 119896 119887119895[119896] (119895 = 0 1 119873
119887) are the feedback taps at time
119896 and 119868119890[119896] is the slicer output which is the constellation
point closest to 119871119868119890[119896] The least-mean-square (LMS) update
algorithm for the feedforward and feedback filter taps is givenby
119888119895 [119896 + 1] = 119888119894 [119896] minus 120583119890119863 [119896] 119910 [119896 minus 119894]
119887119895 [119896 + 1] = 119887119895 [119896] minus 120583119890119863 [119896]
119868
119890[119896 minus 119895]
(2)
where 120583 is the step size and 119890119863[119896] = 119871
119868
119890[119896] minus
119868
119890[119896] is the deci-
sion error In the blind mode using the stop-and-go (SAG)algorithm the filter tap coefficients are updated via
119888119895 [119896 + 1] = 119888119894 [119896] minus 120583119891 [119896] 119890119863 [119896] 119910 [119896 minus 119894]
119887119895 [119896 + 1] = 119887119895 [119896] minus 120583119891 [119896] 119890119863 [119896]
119868
119890[119896 minus 119895]
(3)
The SAG flag 119891[119896] is defined as
119891 [119896] = 1 if sgn 119890
119863 [119896] = sgn 119890119904 [119896]
0 if sgn 119890119863 [119896] = sgn 119890
119904 [119896] (4)
where sgnsdot is a signum function defined by
sgn 119909 =
minus1 when 119909 lt 0
0 when 119909 = 0
+1 when 119909 gt 0
(5)
and 119890119904[119896] is the Sato error given by
119890119904 [119896] = 119871
119868
119890[119896] 119910 [119896] minus 120574 sgn 119871119868
119890[119896] (6)
where 120574 is a constant valueThe value of 119871119863119890after interleaving
is computed as 119871119868119890minus 119871119868
119888and then input turbo decoder The
estimated extrinsic value of 119871119863119888at decoder output is given by
119871119863
119888= log 119875 (119909 = +1)
119875 (119909 = minus1) (7)
The extrinsic value 119871119863119888which calculates the postprobability is
error correction terms The reinterleaving of computed valueas 119871119863119888minus 119871119863
119890is input to DFE then 119871119868
119888is updated in order to
compensate for the errors
21 Experimental Result of USC Channel We evaluate theperformance of the proposed method in real underwa-ter environments The experiment was conducted off thecoast of Donghae city Korea during June 2011 The soundspeed profiles were measured periodically by XBT (eXpend-able BathyThermograph) instrument and are plotted inFigure 2(a) The water depth was approximately 200 [m]An acoustic transducer was towed at 100 [m] below theocean The source signal has 38 [kHz] to 8 [kHz] band Thehydrophonewas equipped at 200 [m] sea bottom and the hor-izontal range from transducer is 3 [km] The received signalis sampled at 60 [kHz] sampling frequency In Figure 2(b)underwater channel response is shown during 5 minutesThis response was measured by using LFM (linear frequencymodulated) signal with bandwidth of 4 [kHz] We observethat themain arrival paths appear on around delay of 40 [ms]The channel gains for the secondarythird arrivals fluctuatemore rapidly This sparse channel is affected by multipathpropagation by reflection from surface and bottom In orderto perform periodic channel estimation and synchroniza-tion the packet consisted of a LFM probe signal for bothsynchronization and channel estimation silence interval PNcode of 128 symbol timing sequence preamble data andtransmission data symbol which are added lastly Experimentparameters are listed in Table 1
Figure 3 shows BER curves of iterative turbo equalizationWe confirmed that the performance is the best as iterationnumbers are increased If the range of iteration number isthree or four we can achieve BER performance enhancementby 35 [dB] compared to noniteration However we cannotachieve the performance gain after third iterations and weconclude that the optimal iteration numbers are three
International Journal of Distributed Sensor Networks 3
Turbo encoder Interleaver Symbol
mapper
Channel
DFEequalizer
Deinterleaver
Turbodecoder
Interleaver
AWGN
LD
e
LD
c
LI
e
LI
c
+
+minus
minus
y[k]
Figure 1 Model of the turbo equalization in baseband
1450 1460 1470 1480 1490 1500 1510 1520
0
50
100
150
200
Sound velocity (ms)
Dep
th (m
)
(a) Measured sound velocity profile
Am
plitu
de 108060402
0
010 012 014 0180160080060040020
050
100150
200250
300
Delay (s)
Time (
s)
Channel impulse response (3km)
(b) USC channel delay profile
Figure 2 Characteristic of underwater sensor communicationchannel
3 Application to MIMOUnderwater Communication
MIMO technique is being studied in underwater commu-nications because of increasing the data rates MIMO com-munication systems employ multiple sensors at the transmit-ter and receiver sides They can yield significantly increaseddata rates and improved link reliability without additional
Table 1 Parameters of UWA channel experiment
Source 984-bit textChannel coding Turbo codeCoding rate 13Input bit size 984 bitsOutput bit size 2952 bitsBit rate 1 kbpsCenter frequency 6 kHzSampling frequency 60 kHzModulation QPSKDistance 3 kmDepth TX 100m RX 200m
0 1 2 3 4 5 6 7 8EbNo (dB)
BER
itr 0itr 1itr 2
itr 3itr 4
10minus6
10minus5
10minus4
10minus3
10minus2
10minus1
100
Figure 3 BER Performance of iterative turbo equalizer for USCchannel for SISO system
bandwidth Representativemethod is space-time trellis codes(STTCs) In this paper we propose turbo equalizationmodelsfor MIMO system in the USC channel employing STTC andturbo codes We will show how much coding gain can beachieved for increasing number of iterations
4 International Journal of Distributed Sensor Networks
31 System Model for MIMO Underwater CommunicationConsider an119873times119872MIMO communication system equippedwith 119873 transmit transducers and 119872 receives transducersThe individual data streams of each transmitter are symbolaligned and are sent simultaneously The data streams ofeach transmitter consist of successive data packagesThe datapackages start with a training sequence which is followed bythe payload sequence Figure 4 shows the proposed 119873 times 119872MIMO system structure based on turbo equalization
The source bits are encoded by STTC encoder andinterleaved then mapped to QPSK symbols After the signalshave been received by the receive array the process consistsof estimating the channel impulse response in training ordecision mode and detecting the symbols by using theestimated channel impulse response For increasing data rateand diversity gain according to using MIMO technique inunderwater channel environment exact channel estimationis necessarily After channel estimation and symbol detec-tion have been done significant performance improvementiterative turbo equalization BCJR algorithm [11] for STTCdecoding deinterleaving and turbo decoding is performedAs shown in Figure 1 the baseband equivalent signal receivedat the119898th hydrophone can be expressed in the discrete-timedomain form as
119903119898 (119896) = 119867
119873
sum
119899=1
119871
sum
119897=0
ℎ119899119898 (119896 119897) 119904119899 (119896 minus 119897) 119890
1198950119899119898(119896)+ V119898 (119896) (8)
where 119896 is the time index 119904119899(119896) is the transmitted data
symbol or training symbol from 119899th transducer and ℎ119899119898(119896 119897)
is the channel impulse response of the frequency-selectivetime-varying fading channel with length 119871 + 1 between 119899thtransducer and 119898th hydrophone V
119898(119896) means an additive
white Gaussian noise The phase term 0119899119898(119896) means thefrequency or timing synchronization error but we do notconsider this in this paperThe measurement vector 119903
119898at the
119898th hydrophone can be written as
119903119898=
119873
sum
119899=1
119878119899ℎ119899119898+ V119898 (9)
For119898 = 1 119872 where
119903119898= [119903119898 (1) 119903119898 (119870)]
119879
ℎ119899119898= [ℎ119899119898 (1) ℎ119899119898 (119871 + 1)]
119879
(10)
119870 is a length of the training sequence
119878119899=
[[[[[
[
119904119899 (1) 0 sdot sdot sdot 0
119904119899 (2) 119904
119899 (1) d d
d d d119904119899 (119870) 119904119899 (119870 minus 1) sdot sdot sdot 119904
119899 (119870 minus 119871)
]]]]]
]
(11)
where 119878119899contains the 119899th training sequence and V
119898is the
additive noise vector Equation (11) can be rewritten as
119903119898= 119878ℎ119898119867 + V
119898 (12)
where 119878 = [1198781 119878
119873] and ℎ
119898= [ℎ1119898
119879sdot sdot sdot ℎ119873119898
119879]119879
The channel estimation problem is to estimate ℎ119898from
the measurement 119903119898and known 119878 as shown in (12) Existing
techniques for sparse channel estimation can be categorizedroughly into two types [12] The first type is approximationschemes that solve the nonlinear optimization problem ofminimizing the squared residual prediction error as a func-tion of the gain and the delay location of all the dominant tapsThe second type chooses some important taps of the sampledchannel impulse response Among the explicit sparse channelestimation techniques are the 119871
119901-norm regularized method
and greedy algorithms such as the matching pursuit (MP)algorithm In this paper we use the sparse channel estimationwith dominant tap detection by using1198711-normminimization1198711-norm minimization is used for method of estimate ℎ
119898as
the following equation
ℎ119898= argmin 1198781 subject to 1003816100381610038161003816119903119898 minus 119878ℎ119898
1003816100381610038161003816 lt 120598 (13)
Then the values of the channel responses are clipped as fol-lows
ℎ119899119898 (119897) =
nonzero if ℎ119899119898 (119897) gt threshold
zero else(14)
This dominant tap detection is performed that if the esti-mated value ℎ
119899119898(119897) is bigger than particular value it would
have nonzero value and the residuals will have zero valueThe value ℎ
119898is the channel information corresponding to the
estimated nonzero tap In this paper we use the zero forcingequalizer for ISI cancellation
32 MIMO Turbo Equalization and Results In MIMO turboequalization two codes are concatenated in the serial fashionThe inner codes are turbo codes with 16 states described inSection 2 and outer codes are STTCs with optimal generatorpolynomial described in [13] Normally the candidates ofouter codes are space-time block codes (STBCs) and STTCsRepresentative method of STBCs is V-BLAST (Vertical-BellLabs lAyered Space-Time) [14 15] This system obtaineddiversity or spatial multiplexing effect The MLD is optimaland fully exploits the available diversity However STBCs forMIMO turbo equalization cannot obtain coding gain evenif increasing number of iteration This is the reason that theoutputs of STBCs are not soft type symbolsThe types of inputsymbols and output symbols must be soft symbols in orderto improve performance by increasing number of iterations[16] At the receiver we resort to powerful turbo equalizationalgorithms that iteratively exchange probabilistic informationbetween inner decoder and outer decoder thereby reducingthe error rates significantlyTherefore we adopt STTCswhichare introduced by Roy et al in 2007 [17] These codes aredescribed by a trellis structured We used BCJR algorithmwhich is soft-based Viterbi algorithm as a STTC decoderThe symbols of outer decoder are then subtracted from theinput and interleavedThe interleaved symbols are canceled aposteriori from the proceeding received symbol Interleavinghelps receiver convergence To confirm the performanceimprovement of the iterative turbo equalization for MIMOsystem the simulation was conducted Underwater commu-nication is difficult to maintain the reliability because it is
International Journal of Distributed Sensor Networks 5
Turbo encoder
Source bits
Interleaver STTC encoder
QPSKmapping
QPSKmapping
Transmitarray
Underw
aterchannel Channel
estimation
Symboldetection
BCJRdecoder
Receivearray
Channelestimation
Deinterleaver Turbodecoder
Interleaver
Decodedbits
Figure 4119873 times119872MIMO system structure based on turbo equalization
07 08 09 1 11 12 13 14 150
02
04
06
08
1
Arrival time (s)
Am
plitu
de
times10minus3
Arrival amp versus arrival time
(a) Tx1-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(b) Tx1-Rx2
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(c) Tx2-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4 Arrival amp versus arrival time
(d) Tx2-Rx2
Figure 5 Channel impulse responses for measured 2 times 2MIMO system
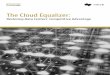
affected by temperature depth and geometry The channelsfor simulation were generated by Bellhop model and thesound speed profile that was measured via sea trials wasused We considered 2 times 2MIMO system Figures 5(a)ndash5(d)are channel impulse responses between the transmitters andreceivers As expected numerous reflections can be observeddue to surface and bottom The range between sources andreceivers is 1 [km] and the water depth is 200 [m] Thetransmittersrsquo and receiversrsquo depths are 110 [m] and 117 [m]The carrier frequency is 12 [kHz] and the sampling frequencyis 192 [kHz] The preamble signal was modulated by BPSK
with data rate of 05 [kbps] Source data were modulated byQPSK with data rate of 2 [kbps] The underwater channelcharacterization for multipath environment is measuredusing 2000 [symbols] of PN code symbols Figure 6 shows theBER curves using the iterative turbo equalization for MIMOsystem in USC channel based on Figure 4 In Figure 6 curveA shows only zero forcing (ZF) equalizer and curve B showsSTTCs which are added after ZF equalizer Curve B obtainscoding gains of 10 [dB] compared to curve AThe importanceof measuring the gains at same BER of 10minus4 is illustrated bycurves C and D
6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Distributed Sensor Networks
trials were conducted in the East Sea with an iterative turboequalizer
2 Iterative Turbo Equalizer forUSC Channel in the SISO System
Iterative turbo equalizer has better performance than the gen-eral equalizer However because of using a MAP (maximuma posteriori) algorithm it has the disadvantage of complexityby increasing exponentially as the length of the channelimpulse response [7] For this reason a low-complexity linearequalizer or DFE is used in order to reduce the complexityIn this paper we consider turbo equalizer with DFE Thebaseband model of turbo equalizer is shown in Figure 1
Figure 1 shows iterative linear equalizer that is decisionfeedback equalizer is used which constitutes an outer codeof the receiver An inner code consists of the turbo codesThe information to be transmitted was encoded by a rateof 13 turbo code with identical recursive encoders havingthe duobinary generator polynomial with 16 states [8] Theinterleavers are designed for good properties in a turbo codeand were taken from [10] The receiver of turbo equalizerconsists of equalizer and decoder Equalizer and decoder areconnected through the interleaving and deinterleaving thatupdate each otherrsquos information repeatedly The inner codedbits are then subtracted from the input and interleaved Theinterleaved output is canceled a posteriori from the proceed-ing received signal Interleaving helps receiver convergence
The 119871119868119890is output value of DFE as estimated extrinsic value
from received signal Let 119910[119896] be the equalizer input at time119896 then the output of the DFE at time 119896 119871119868
119890[119896] is given by
119871119868
119890[119896] =
119873119887minus1
sum
119894=0
119888119894 [119896] 119910 [119896 minus 119894] minus
119873119886
sum
119895=0
119887119895 [119896]
119868
119890[119896 minus 119895] (1)
where 119888119894[119896] (119894 = 0 1 119873
119888minus1) are the forward equalizer taps
at time 119896 119887119895[119896] (119895 = 0 1 119873
119887) are the feedback taps at time
119896 and 119868119890[119896] is the slicer output which is the constellation
point closest to 119871119868119890[119896] The least-mean-square (LMS) update
algorithm for the feedforward and feedback filter taps is givenby
119888119895 [119896 + 1] = 119888119894 [119896] minus 120583119890119863 [119896] 119910 [119896 minus 119894]
119887119895 [119896 + 1] = 119887119895 [119896] minus 120583119890119863 [119896]
119868
119890[119896 minus 119895]
(2)
where 120583 is the step size and 119890119863[119896] = 119871
119868
119890[119896] minus
119868
119890[119896] is the deci-
sion error In the blind mode using the stop-and-go (SAG)algorithm the filter tap coefficients are updated via
119888119895 [119896 + 1] = 119888119894 [119896] minus 120583119891 [119896] 119890119863 [119896] 119910 [119896 minus 119894]
119887119895 [119896 + 1] = 119887119895 [119896] minus 120583119891 [119896] 119890119863 [119896]
119868
119890[119896 minus 119895]
(3)
The SAG flag 119891[119896] is defined as
119891 [119896] = 1 if sgn 119890
119863 [119896] = sgn 119890119904 [119896]
0 if sgn 119890119863 [119896] = sgn 119890
119904 [119896] (4)
where sgnsdot is a signum function defined by
sgn 119909 =
minus1 when 119909 lt 0
0 when 119909 = 0
+1 when 119909 gt 0
(5)
and 119890119904[119896] is the Sato error given by
119890119904 [119896] = 119871
119868
119890[119896] 119910 [119896] minus 120574 sgn 119871119868
119890[119896] (6)
where 120574 is a constant valueThe value of 119871119863119890after interleaving
is computed as 119871119868119890minus 119871119868
119888and then input turbo decoder The
estimated extrinsic value of 119871119863119888at decoder output is given by
119871119863
119888= log 119875 (119909 = +1)
119875 (119909 = minus1) (7)
The extrinsic value 119871119863119888which calculates the postprobability is
error correction terms The reinterleaving of computed valueas 119871119863119888minus 119871119863
119890is input to DFE then 119871119868
119888is updated in order to
compensate for the errors
21 Experimental Result of USC Channel We evaluate theperformance of the proposed method in real underwa-ter environments The experiment was conducted off thecoast of Donghae city Korea during June 2011 The soundspeed profiles were measured periodically by XBT (eXpend-able BathyThermograph) instrument and are plotted inFigure 2(a) The water depth was approximately 200 [m]An acoustic transducer was towed at 100 [m] below theocean The source signal has 38 [kHz] to 8 [kHz] band Thehydrophonewas equipped at 200 [m] sea bottom and the hor-izontal range from transducer is 3 [km] The received signalis sampled at 60 [kHz] sampling frequency In Figure 2(b)underwater channel response is shown during 5 minutesThis response was measured by using LFM (linear frequencymodulated) signal with bandwidth of 4 [kHz] We observethat themain arrival paths appear on around delay of 40 [ms]The channel gains for the secondarythird arrivals fluctuatemore rapidly This sparse channel is affected by multipathpropagation by reflection from surface and bottom In orderto perform periodic channel estimation and synchroniza-tion the packet consisted of a LFM probe signal for bothsynchronization and channel estimation silence interval PNcode of 128 symbol timing sequence preamble data andtransmission data symbol which are added lastly Experimentparameters are listed in Table 1
Figure 3 shows BER curves of iterative turbo equalizationWe confirmed that the performance is the best as iterationnumbers are increased If the range of iteration number isthree or four we can achieve BER performance enhancementby 35 [dB] compared to noniteration However we cannotachieve the performance gain after third iterations and weconclude that the optimal iteration numbers are three
International Journal of Distributed Sensor Networks 3
Turbo encoder Interleaver Symbol
mapper
Channel
DFEequalizer
Deinterleaver
Turbodecoder
Interleaver
AWGN
LD
e
LD
c
LI
e
LI
c
+
+minus
minus
y[k]
Figure 1 Model of the turbo equalization in baseband
1450 1460 1470 1480 1490 1500 1510 1520
0
50
100
150
200
Sound velocity (ms)
Dep
th (m
)
(a) Measured sound velocity profile
Am
plitu
de 108060402
0
010 012 014 0180160080060040020
050
100150
200250
300
Delay (s)
Time (
s)
Channel impulse response (3km)
(b) USC channel delay profile
Figure 2 Characteristic of underwater sensor communicationchannel
3 Application to MIMOUnderwater Communication
MIMO technique is being studied in underwater commu-nications because of increasing the data rates MIMO com-munication systems employ multiple sensors at the transmit-ter and receiver sides They can yield significantly increaseddata rates and improved link reliability without additional
Table 1 Parameters of UWA channel experiment
Source 984-bit textChannel coding Turbo codeCoding rate 13Input bit size 984 bitsOutput bit size 2952 bitsBit rate 1 kbpsCenter frequency 6 kHzSampling frequency 60 kHzModulation QPSKDistance 3 kmDepth TX 100m RX 200m
0 1 2 3 4 5 6 7 8EbNo (dB)
BER
itr 0itr 1itr 2
itr 3itr 4
10minus6
10minus5
10minus4
10minus3
10minus2
10minus1
100
Figure 3 BER Performance of iterative turbo equalizer for USCchannel for SISO system
bandwidth Representativemethod is space-time trellis codes(STTCs) In this paper we propose turbo equalizationmodelsfor MIMO system in the USC channel employing STTC andturbo codes We will show how much coding gain can beachieved for increasing number of iterations
4 International Journal of Distributed Sensor Networks
31 System Model for MIMO Underwater CommunicationConsider an119873times119872MIMO communication system equippedwith 119873 transmit transducers and 119872 receives transducersThe individual data streams of each transmitter are symbolaligned and are sent simultaneously The data streams ofeach transmitter consist of successive data packagesThe datapackages start with a training sequence which is followed bythe payload sequence Figure 4 shows the proposed 119873 times 119872MIMO system structure based on turbo equalization
The source bits are encoded by STTC encoder andinterleaved then mapped to QPSK symbols After the signalshave been received by the receive array the process consistsof estimating the channel impulse response in training ordecision mode and detecting the symbols by using theestimated channel impulse response For increasing data rateand diversity gain according to using MIMO technique inunderwater channel environment exact channel estimationis necessarily After channel estimation and symbol detec-tion have been done significant performance improvementiterative turbo equalization BCJR algorithm [11] for STTCdecoding deinterleaving and turbo decoding is performedAs shown in Figure 1 the baseband equivalent signal receivedat the119898th hydrophone can be expressed in the discrete-timedomain form as
119903119898 (119896) = 119867
119873
sum
119899=1
119871
sum
119897=0
ℎ119899119898 (119896 119897) 119904119899 (119896 minus 119897) 119890
1198950119899119898(119896)+ V119898 (119896) (8)
where 119896 is the time index 119904119899(119896) is the transmitted data
symbol or training symbol from 119899th transducer and ℎ119899119898(119896 119897)
is the channel impulse response of the frequency-selectivetime-varying fading channel with length 119871 + 1 between 119899thtransducer and 119898th hydrophone V
119898(119896) means an additive
white Gaussian noise The phase term 0119899119898(119896) means thefrequency or timing synchronization error but we do notconsider this in this paperThe measurement vector 119903
119898at the
119898th hydrophone can be written as
119903119898=
119873
sum
119899=1
119878119899ℎ119899119898+ V119898 (9)
For119898 = 1 119872 where
119903119898= [119903119898 (1) 119903119898 (119870)]
119879
ℎ119899119898= [ℎ119899119898 (1) ℎ119899119898 (119871 + 1)]
119879
(10)
119870 is a length of the training sequence
119878119899=
[[[[[
[
119904119899 (1) 0 sdot sdot sdot 0
119904119899 (2) 119904
119899 (1) d d
d d d119904119899 (119870) 119904119899 (119870 minus 1) sdot sdot sdot 119904
119899 (119870 minus 119871)
]]]]]
]
(11)
where 119878119899contains the 119899th training sequence and V
119898is the
additive noise vector Equation (11) can be rewritten as
119903119898= 119878ℎ119898119867 + V
119898 (12)
where 119878 = [1198781 119878
119873] and ℎ
119898= [ℎ1119898
119879sdot sdot sdot ℎ119873119898
119879]119879
The channel estimation problem is to estimate ℎ119898from
the measurement 119903119898and known 119878 as shown in (12) Existing
techniques for sparse channel estimation can be categorizedroughly into two types [12] The first type is approximationschemes that solve the nonlinear optimization problem ofminimizing the squared residual prediction error as a func-tion of the gain and the delay location of all the dominant tapsThe second type chooses some important taps of the sampledchannel impulse response Among the explicit sparse channelestimation techniques are the 119871
119901-norm regularized method
and greedy algorithms such as the matching pursuit (MP)algorithm In this paper we use the sparse channel estimationwith dominant tap detection by using1198711-normminimization1198711-norm minimization is used for method of estimate ℎ
119898as
the following equation
ℎ119898= argmin 1198781 subject to 1003816100381610038161003816119903119898 minus 119878ℎ119898
1003816100381610038161003816 lt 120598 (13)
Then the values of the channel responses are clipped as fol-lows
ℎ119899119898 (119897) =
nonzero if ℎ119899119898 (119897) gt threshold
zero else(14)
This dominant tap detection is performed that if the esti-mated value ℎ
119899119898(119897) is bigger than particular value it would
have nonzero value and the residuals will have zero valueThe value ℎ
119898is the channel information corresponding to the
estimated nonzero tap In this paper we use the zero forcingequalizer for ISI cancellation
32 MIMO Turbo Equalization and Results In MIMO turboequalization two codes are concatenated in the serial fashionThe inner codes are turbo codes with 16 states described inSection 2 and outer codes are STTCs with optimal generatorpolynomial described in [13] Normally the candidates ofouter codes are space-time block codes (STBCs) and STTCsRepresentative method of STBCs is V-BLAST (Vertical-BellLabs lAyered Space-Time) [14 15] This system obtaineddiversity or spatial multiplexing effect The MLD is optimaland fully exploits the available diversity However STBCs forMIMO turbo equalization cannot obtain coding gain evenif increasing number of iteration This is the reason that theoutputs of STBCs are not soft type symbolsThe types of inputsymbols and output symbols must be soft symbols in orderto improve performance by increasing number of iterations[16] At the receiver we resort to powerful turbo equalizationalgorithms that iteratively exchange probabilistic informationbetween inner decoder and outer decoder thereby reducingthe error rates significantlyTherefore we adopt STTCswhichare introduced by Roy et al in 2007 [17] These codes aredescribed by a trellis structured We used BCJR algorithmwhich is soft-based Viterbi algorithm as a STTC decoderThe symbols of outer decoder are then subtracted from theinput and interleavedThe interleaved symbols are canceled aposteriori from the proceeding received symbol Interleavinghelps receiver convergence To confirm the performanceimprovement of the iterative turbo equalization for MIMOsystem the simulation was conducted Underwater commu-nication is difficult to maintain the reliability because it is
International Journal of Distributed Sensor Networks 5
Turbo encoder
Source bits
Interleaver STTC encoder
QPSKmapping
QPSKmapping
Transmitarray
Underw
aterchannel Channel
estimation
Symboldetection
BCJRdecoder
Receivearray
Channelestimation
Deinterleaver Turbodecoder
Interleaver
Decodedbits
Figure 4119873 times119872MIMO system structure based on turbo equalization
07 08 09 1 11 12 13 14 150
02
04
06
08
1
Arrival time (s)
Am
plitu
de
times10minus3
Arrival amp versus arrival time
(a) Tx1-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(b) Tx1-Rx2
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(c) Tx2-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4 Arrival amp versus arrival time
(d) Tx2-Rx2
Figure 5 Channel impulse responses for measured 2 times 2MIMO system
affected by temperature depth and geometry The channelsfor simulation were generated by Bellhop model and thesound speed profile that was measured via sea trials wasused We considered 2 times 2MIMO system Figures 5(a)ndash5(d)are channel impulse responses between the transmitters andreceivers As expected numerous reflections can be observeddue to surface and bottom The range between sources andreceivers is 1 [km] and the water depth is 200 [m] Thetransmittersrsquo and receiversrsquo depths are 110 [m] and 117 [m]The carrier frequency is 12 [kHz] and the sampling frequencyis 192 [kHz] The preamble signal was modulated by BPSK
with data rate of 05 [kbps] Source data were modulated byQPSK with data rate of 2 [kbps] The underwater channelcharacterization for multipath environment is measuredusing 2000 [symbols] of PN code symbols Figure 6 shows theBER curves using the iterative turbo equalization for MIMOsystem in USC channel based on Figure 4 In Figure 6 curveA shows only zero forcing (ZF) equalizer and curve B showsSTTCs which are added after ZF equalizer Curve B obtainscoding gains of 10 [dB] compared to curve AThe importanceof measuring the gains at same BER of 10minus4 is illustrated bycurves C and D
6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 3
Turbo encoder Interleaver Symbol
mapper
Channel
DFEequalizer
Deinterleaver
Turbodecoder
Interleaver
AWGN
LD
e
LD
c
LI
e
LI
c
+
+minus
minus
y[k]
Figure 1 Model of the turbo equalization in baseband
1450 1460 1470 1480 1490 1500 1510 1520
0
50
100
150
200
Sound velocity (ms)
Dep
th (m
)
(a) Measured sound velocity profile
Am
plitu
de 108060402
0
010 012 014 0180160080060040020
050
100150
200250
300
Delay (s)
Time (
s)
Channel impulse response (3km)
(b) USC channel delay profile
Figure 2 Characteristic of underwater sensor communicationchannel
3 Application to MIMOUnderwater Communication
MIMO technique is being studied in underwater commu-nications because of increasing the data rates MIMO com-munication systems employ multiple sensors at the transmit-ter and receiver sides They can yield significantly increaseddata rates and improved link reliability without additional
Table 1 Parameters of UWA channel experiment
Source 984-bit textChannel coding Turbo codeCoding rate 13Input bit size 984 bitsOutput bit size 2952 bitsBit rate 1 kbpsCenter frequency 6 kHzSampling frequency 60 kHzModulation QPSKDistance 3 kmDepth TX 100m RX 200m
0 1 2 3 4 5 6 7 8EbNo (dB)
BER
itr 0itr 1itr 2
itr 3itr 4
10minus6
10minus5
10minus4
10minus3
10minus2
10minus1
100
Figure 3 BER Performance of iterative turbo equalizer for USCchannel for SISO system
bandwidth Representativemethod is space-time trellis codes(STTCs) In this paper we propose turbo equalizationmodelsfor MIMO system in the USC channel employing STTC andturbo codes We will show how much coding gain can beachieved for increasing number of iterations
4 International Journal of Distributed Sensor Networks
31 System Model for MIMO Underwater CommunicationConsider an119873times119872MIMO communication system equippedwith 119873 transmit transducers and 119872 receives transducersThe individual data streams of each transmitter are symbolaligned and are sent simultaneously The data streams ofeach transmitter consist of successive data packagesThe datapackages start with a training sequence which is followed bythe payload sequence Figure 4 shows the proposed 119873 times 119872MIMO system structure based on turbo equalization
The source bits are encoded by STTC encoder andinterleaved then mapped to QPSK symbols After the signalshave been received by the receive array the process consistsof estimating the channel impulse response in training ordecision mode and detecting the symbols by using theestimated channel impulse response For increasing data rateand diversity gain according to using MIMO technique inunderwater channel environment exact channel estimationis necessarily After channel estimation and symbol detec-tion have been done significant performance improvementiterative turbo equalization BCJR algorithm [11] for STTCdecoding deinterleaving and turbo decoding is performedAs shown in Figure 1 the baseband equivalent signal receivedat the119898th hydrophone can be expressed in the discrete-timedomain form as
119903119898 (119896) = 119867
119873
sum
119899=1
119871
sum
119897=0
ℎ119899119898 (119896 119897) 119904119899 (119896 minus 119897) 119890
1198950119899119898(119896)+ V119898 (119896) (8)
where 119896 is the time index 119904119899(119896) is the transmitted data
symbol or training symbol from 119899th transducer and ℎ119899119898(119896 119897)
is the channel impulse response of the frequency-selectivetime-varying fading channel with length 119871 + 1 between 119899thtransducer and 119898th hydrophone V
119898(119896) means an additive
white Gaussian noise The phase term 0119899119898(119896) means thefrequency or timing synchronization error but we do notconsider this in this paperThe measurement vector 119903
119898at the
119898th hydrophone can be written as
119903119898=
119873
sum
119899=1
119878119899ℎ119899119898+ V119898 (9)
For119898 = 1 119872 where
119903119898= [119903119898 (1) 119903119898 (119870)]
119879
ℎ119899119898= [ℎ119899119898 (1) ℎ119899119898 (119871 + 1)]
119879
(10)
119870 is a length of the training sequence
119878119899=
[[[[[
[
119904119899 (1) 0 sdot sdot sdot 0
119904119899 (2) 119904
119899 (1) d d
d d d119904119899 (119870) 119904119899 (119870 minus 1) sdot sdot sdot 119904
119899 (119870 minus 119871)
]]]]]
]
(11)
where 119878119899contains the 119899th training sequence and V
119898is the
additive noise vector Equation (11) can be rewritten as
119903119898= 119878ℎ119898119867 + V
119898 (12)
where 119878 = [1198781 119878
119873] and ℎ
119898= [ℎ1119898
119879sdot sdot sdot ℎ119873119898
119879]119879
The channel estimation problem is to estimate ℎ119898from
the measurement 119903119898and known 119878 as shown in (12) Existing
techniques for sparse channel estimation can be categorizedroughly into two types [12] The first type is approximationschemes that solve the nonlinear optimization problem ofminimizing the squared residual prediction error as a func-tion of the gain and the delay location of all the dominant tapsThe second type chooses some important taps of the sampledchannel impulse response Among the explicit sparse channelestimation techniques are the 119871
119901-norm regularized method
and greedy algorithms such as the matching pursuit (MP)algorithm In this paper we use the sparse channel estimationwith dominant tap detection by using1198711-normminimization1198711-norm minimization is used for method of estimate ℎ
119898as
the following equation
ℎ119898= argmin 1198781 subject to 1003816100381610038161003816119903119898 minus 119878ℎ119898
1003816100381610038161003816 lt 120598 (13)
Then the values of the channel responses are clipped as fol-lows
ℎ119899119898 (119897) =
nonzero if ℎ119899119898 (119897) gt threshold
zero else(14)
This dominant tap detection is performed that if the esti-mated value ℎ
119899119898(119897) is bigger than particular value it would
have nonzero value and the residuals will have zero valueThe value ℎ
119898is the channel information corresponding to the
estimated nonzero tap In this paper we use the zero forcingequalizer for ISI cancellation
32 MIMO Turbo Equalization and Results In MIMO turboequalization two codes are concatenated in the serial fashionThe inner codes are turbo codes with 16 states described inSection 2 and outer codes are STTCs with optimal generatorpolynomial described in [13] Normally the candidates ofouter codes are space-time block codes (STBCs) and STTCsRepresentative method of STBCs is V-BLAST (Vertical-BellLabs lAyered Space-Time) [14 15] This system obtaineddiversity or spatial multiplexing effect The MLD is optimaland fully exploits the available diversity However STBCs forMIMO turbo equalization cannot obtain coding gain evenif increasing number of iteration This is the reason that theoutputs of STBCs are not soft type symbolsThe types of inputsymbols and output symbols must be soft symbols in orderto improve performance by increasing number of iterations[16] At the receiver we resort to powerful turbo equalizationalgorithms that iteratively exchange probabilistic informationbetween inner decoder and outer decoder thereby reducingthe error rates significantlyTherefore we adopt STTCswhichare introduced by Roy et al in 2007 [17] These codes aredescribed by a trellis structured We used BCJR algorithmwhich is soft-based Viterbi algorithm as a STTC decoderThe symbols of outer decoder are then subtracted from theinput and interleavedThe interleaved symbols are canceled aposteriori from the proceeding received symbol Interleavinghelps receiver convergence To confirm the performanceimprovement of the iterative turbo equalization for MIMOsystem the simulation was conducted Underwater commu-nication is difficult to maintain the reliability because it is
International Journal of Distributed Sensor Networks 5
Turbo encoder
Source bits
Interleaver STTC encoder
QPSKmapping
QPSKmapping
Transmitarray
Underw
aterchannel Channel
estimation
Symboldetection
BCJRdecoder
Receivearray
Channelestimation
Deinterleaver Turbodecoder
Interleaver
Decodedbits
Figure 4119873 times119872MIMO system structure based on turbo equalization
07 08 09 1 11 12 13 14 150
02
04
06
08
1
Arrival time (s)
Am
plitu
de
times10minus3
Arrival amp versus arrival time
(a) Tx1-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(b) Tx1-Rx2
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(c) Tx2-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4 Arrival amp versus arrival time
(d) Tx2-Rx2
Figure 5 Channel impulse responses for measured 2 times 2MIMO system
affected by temperature depth and geometry The channelsfor simulation were generated by Bellhop model and thesound speed profile that was measured via sea trials wasused We considered 2 times 2MIMO system Figures 5(a)ndash5(d)are channel impulse responses between the transmitters andreceivers As expected numerous reflections can be observeddue to surface and bottom The range between sources andreceivers is 1 [km] and the water depth is 200 [m] Thetransmittersrsquo and receiversrsquo depths are 110 [m] and 117 [m]The carrier frequency is 12 [kHz] and the sampling frequencyis 192 [kHz] The preamble signal was modulated by BPSK
with data rate of 05 [kbps] Source data were modulated byQPSK with data rate of 2 [kbps] The underwater channelcharacterization for multipath environment is measuredusing 2000 [symbols] of PN code symbols Figure 6 shows theBER curves using the iterative turbo equalization for MIMOsystem in USC channel based on Figure 4 In Figure 6 curveA shows only zero forcing (ZF) equalizer and curve B showsSTTCs which are added after ZF equalizer Curve B obtainscoding gains of 10 [dB] compared to curve AThe importanceof measuring the gains at same BER of 10minus4 is illustrated bycurves C and D
6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Distributed Sensor Networks
31 System Model for MIMO Underwater CommunicationConsider an119873times119872MIMO communication system equippedwith 119873 transmit transducers and 119872 receives transducersThe individual data streams of each transmitter are symbolaligned and are sent simultaneously The data streams ofeach transmitter consist of successive data packagesThe datapackages start with a training sequence which is followed bythe payload sequence Figure 4 shows the proposed 119873 times 119872MIMO system structure based on turbo equalization
The source bits are encoded by STTC encoder andinterleaved then mapped to QPSK symbols After the signalshave been received by the receive array the process consistsof estimating the channel impulse response in training ordecision mode and detecting the symbols by using theestimated channel impulse response For increasing data rateand diversity gain according to using MIMO technique inunderwater channel environment exact channel estimationis necessarily After channel estimation and symbol detec-tion have been done significant performance improvementiterative turbo equalization BCJR algorithm [11] for STTCdecoding deinterleaving and turbo decoding is performedAs shown in Figure 1 the baseband equivalent signal receivedat the119898th hydrophone can be expressed in the discrete-timedomain form as
119903119898 (119896) = 119867
119873
sum
119899=1
119871
sum
119897=0
ℎ119899119898 (119896 119897) 119904119899 (119896 minus 119897) 119890
1198950119899119898(119896)+ V119898 (119896) (8)
where 119896 is the time index 119904119899(119896) is the transmitted data
symbol or training symbol from 119899th transducer and ℎ119899119898(119896 119897)
is the channel impulse response of the frequency-selectivetime-varying fading channel with length 119871 + 1 between 119899thtransducer and 119898th hydrophone V
119898(119896) means an additive
white Gaussian noise The phase term 0119899119898(119896) means thefrequency or timing synchronization error but we do notconsider this in this paperThe measurement vector 119903
119898at the
119898th hydrophone can be written as
119903119898=
119873
sum
119899=1
119878119899ℎ119899119898+ V119898 (9)
For119898 = 1 119872 where
119903119898= [119903119898 (1) 119903119898 (119870)]
119879
ℎ119899119898= [ℎ119899119898 (1) ℎ119899119898 (119871 + 1)]
119879
(10)
119870 is a length of the training sequence
119878119899=
[[[[[
[
119904119899 (1) 0 sdot sdot sdot 0
119904119899 (2) 119904
119899 (1) d d
d d d119904119899 (119870) 119904119899 (119870 minus 1) sdot sdot sdot 119904
119899 (119870 minus 119871)
]]]]]
]
(11)
where 119878119899contains the 119899th training sequence and V
119898is the
additive noise vector Equation (11) can be rewritten as
119903119898= 119878ℎ119898119867 + V
119898 (12)
where 119878 = [1198781 119878
119873] and ℎ
119898= [ℎ1119898
119879sdot sdot sdot ℎ119873119898
119879]119879
The channel estimation problem is to estimate ℎ119898from
the measurement 119903119898and known 119878 as shown in (12) Existing
techniques for sparse channel estimation can be categorizedroughly into two types [12] The first type is approximationschemes that solve the nonlinear optimization problem ofminimizing the squared residual prediction error as a func-tion of the gain and the delay location of all the dominant tapsThe second type chooses some important taps of the sampledchannel impulse response Among the explicit sparse channelestimation techniques are the 119871
119901-norm regularized method
and greedy algorithms such as the matching pursuit (MP)algorithm In this paper we use the sparse channel estimationwith dominant tap detection by using1198711-normminimization1198711-norm minimization is used for method of estimate ℎ
119898as
the following equation
ℎ119898= argmin 1198781 subject to 1003816100381610038161003816119903119898 minus 119878ℎ119898
1003816100381610038161003816 lt 120598 (13)
Then the values of the channel responses are clipped as fol-lows
ℎ119899119898 (119897) =
nonzero if ℎ119899119898 (119897) gt threshold
zero else(14)
This dominant tap detection is performed that if the esti-mated value ℎ
119899119898(119897) is bigger than particular value it would
have nonzero value and the residuals will have zero valueThe value ℎ
119898is the channel information corresponding to the
estimated nonzero tap In this paper we use the zero forcingequalizer for ISI cancellation
32 MIMO Turbo Equalization and Results In MIMO turboequalization two codes are concatenated in the serial fashionThe inner codes are turbo codes with 16 states described inSection 2 and outer codes are STTCs with optimal generatorpolynomial described in [13] Normally the candidates ofouter codes are space-time block codes (STBCs) and STTCsRepresentative method of STBCs is V-BLAST (Vertical-BellLabs lAyered Space-Time) [14 15] This system obtaineddiversity or spatial multiplexing effect The MLD is optimaland fully exploits the available diversity However STBCs forMIMO turbo equalization cannot obtain coding gain evenif increasing number of iteration This is the reason that theoutputs of STBCs are not soft type symbolsThe types of inputsymbols and output symbols must be soft symbols in orderto improve performance by increasing number of iterations[16] At the receiver we resort to powerful turbo equalizationalgorithms that iteratively exchange probabilistic informationbetween inner decoder and outer decoder thereby reducingthe error rates significantlyTherefore we adopt STTCswhichare introduced by Roy et al in 2007 [17] These codes aredescribed by a trellis structured We used BCJR algorithmwhich is soft-based Viterbi algorithm as a STTC decoderThe symbols of outer decoder are then subtracted from theinput and interleavedThe interleaved symbols are canceled aposteriori from the proceeding received symbol Interleavinghelps receiver convergence To confirm the performanceimprovement of the iterative turbo equalization for MIMOsystem the simulation was conducted Underwater commu-nication is difficult to maintain the reliability because it is
International Journal of Distributed Sensor Networks 5
Turbo encoder
Source bits
Interleaver STTC encoder
QPSKmapping
QPSKmapping
Transmitarray
Underw
aterchannel Channel
estimation
Symboldetection
BCJRdecoder
Receivearray
Channelestimation
Deinterleaver Turbodecoder
Interleaver
Decodedbits
Figure 4119873 times119872MIMO system structure based on turbo equalization
07 08 09 1 11 12 13 14 150
02
04
06
08
1
Arrival time (s)
Am
plitu
de
times10minus3
Arrival amp versus arrival time
(a) Tx1-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(b) Tx1-Rx2
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(c) Tx2-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4 Arrival amp versus arrival time
(d) Tx2-Rx2
Figure 5 Channel impulse responses for measured 2 times 2MIMO system
affected by temperature depth and geometry The channelsfor simulation were generated by Bellhop model and thesound speed profile that was measured via sea trials wasused We considered 2 times 2MIMO system Figures 5(a)ndash5(d)are channel impulse responses between the transmitters andreceivers As expected numerous reflections can be observeddue to surface and bottom The range between sources andreceivers is 1 [km] and the water depth is 200 [m] Thetransmittersrsquo and receiversrsquo depths are 110 [m] and 117 [m]The carrier frequency is 12 [kHz] and the sampling frequencyis 192 [kHz] The preamble signal was modulated by BPSK
with data rate of 05 [kbps] Source data were modulated byQPSK with data rate of 2 [kbps] The underwater channelcharacterization for multipath environment is measuredusing 2000 [symbols] of PN code symbols Figure 6 shows theBER curves using the iterative turbo equalization for MIMOsystem in USC channel based on Figure 4 In Figure 6 curveA shows only zero forcing (ZF) equalizer and curve B showsSTTCs which are added after ZF equalizer Curve B obtainscoding gains of 10 [dB] compared to curve AThe importanceof measuring the gains at same BER of 10minus4 is illustrated bycurves C and D
6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Distributed Sensor Networks 5
Turbo encoder
Source bits
Interleaver STTC encoder
QPSKmapping
QPSKmapping
Transmitarray
Underw
aterchannel Channel
estimation
Symboldetection
BCJRdecoder
Receivearray
Channelestimation
Deinterleaver Turbodecoder
Interleaver
Decodedbits
Figure 4119873 times119872MIMO system structure based on turbo equalization
07 08 09 1 11 12 13 14 150
02
04
06
08
1
Arrival time (s)
Am
plitu
de
times10minus3
Arrival amp versus arrival time
(a) Tx1-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(b) Tx1-Rx2
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4
Arrival amp versus arrival time
(c) Tx2-Rx1
07 08 09 1 11 12 13 14 150
1
2
3
4
5
6
Arrival time (s)
Am
plitu
de
times10minus4 Arrival amp versus arrival time
(d) Tx2-Rx2
Figure 5 Channel impulse responses for measured 2 times 2MIMO system
affected by temperature depth and geometry The channelsfor simulation were generated by Bellhop model and thesound speed profile that was measured via sea trials wasused We considered 2 times 2MIMO system Figures 5(a)ndash5(d)are channel impulse responses between the transmitters andreceivers As expected numerous reflections can be observeddue to surface and bottom The range between sources andreceivers is 1 [km] and the water depth is 200 [m] Thetransmittersrsquo and receiversrsquo depths are 110 [m] and 117 [m]The carrier frequency is 12 [kHz] and the sampling frequencyis 192 [kHz] The preamble signal was modulated by BPSK
with data rate of 05 [kbps] Source data were modulated byQPSK with data rate of 2 [kbps] The underwater channelcharacterization for multipath environment is measuredusing 2000 [symbols] of PN code symbols Figure 6 shows theBER curves using the iterative turbo equalization for MIMOsystem in USC channel based on Figure 4 In Figure 6 curveA shows only zero forcing (ZF) equalizer and curve B showsSTTCs which are added after ZF equalizer Curve B obtainscoding gains of 10 [dB] compared to curve AThe importanceof measuring the gains at same BER of 10minus4 is illustrated bycurves C and D
6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Distributed Sensor Networks
0 5 10 15 20 25EsNo (dB)
BER
10minus6
10minus4
10minus2
100
A only ZFB ZF + STTC
C ZF + STTC + turbo code (itr = 1)D ZF+ STTC + turbo code (itr = 5)
Figure 6 Performance of MIMO system
The same as SISO system we also confirmed that the cod-ing gain of 1 dB can be achieved compared to noniteration
4 Conclusions
In this paper we proposed receiver structure based on aniterative turbo equalization to cope with intersymbol inter-ference andmultipath errors underwater sensor communica-tion channel Iterative turbo equalizer consists of inner codesand outer codes we employ decision feedback equalizer as anouter code and turbo codes as an inner code
We simulated the performance of the iterative turboequalizer using the channel response data with distance of5 Km and data rate of 1 Kbps which are obtained by experi-mentation in the Eastern coast of Korea In simulation resultswe confirmed that the performance is the best as iterationnumber is increased The BER performance is improvedby 35 dB compared to noniteration We also decided thatoptimal iteration numbers are three We expand iterativeturbo equalizer technique to MIMO system in order toincrease data rates for underwater sensor communicationchannel We also confirmed that the coding gain of 1 dB canbe achieved compared to noniteration
Acknowledgments
This work was supported by Defense Acquisition ProgramAdministration and Agency for Defense Development underthe Contract UD110101DD and was financially supported bythe Ministry of Education Science Technology (MEST) andNational research Foundation of Korea (NRF) through theHuman Resource Training Project for Regional Innovation
References
[1] M Stojanovic J A Catipovic and J G Proakis ldquoPhase-coherent digital communications for underwater acoustic chan-nelsrdquo IEEE Journal of Oceanic Engineering vol 19 no 1 pp 100ndash111 1994
[2] D B Kilfoyle andA B Baggeroer ldquoThe state of the art in under-water acoustic telemetryrdquo IEEE Journal of Oceanic Engineeringvol 25 no 1 pp 4ndash27 2000
[3] M Tuchler R Koetter and A C Singer ldquoTurbo equalizationprinciples and new resultsrdquo IEEE Transactions on Communica-tions vol 50 no 5 pp 754ndash767 2002
[4] R Koetter A C Singer and M Tuchler ldquoTurbo equalizationrdquoIEEE Signal Processing Magazine vol 21 no 1 pp 67ndash80 2004
[5] J Ling T Yardibi X Su H He and J Li ldquoEnhanced channelestimation and symbol detection for high speed multi-inputmulti-output underwater acoustic communicationsrdquo Journal ofthe Acoustical Society of America vol 125 no 5 pp 3067ndash30782009
[6] H C Song P Roux W S Hodgkiss W A Kuperman T Akaland M Stevenson ldquoMultiple-input-multiple-output coherenttime reversal communications in a shallow-water acousticchannelrdquo IEEE Journal of Oceanic Engineering vol 31 no 1 pp170ndash178 2006
[7] C Berrou A Glavieux and P Thitimajshima ldquoNear shanonlimit error-correcting coding and decoding turbo-codesrdquo inProceedings of the IEEE International Conference on Communi-cations (ICC rsquo93) pp 1064ndash1070 May 1993
[8] C Douillard and C Berrou ldquoTurbo codes with rate-m(m + 1)constituent convolutional codesrdquo IEEE Transactions on Com-munications vol 53 no 10 pp 1630ndash1638 2005
[9] T J Richardson and R L Urbanke ldquoEfficient encoding of low-density parity-check codesrdquo IEEE Transactions on InformationTheory vol 47 no 2 pp 638ndash656 2001
[10] J Hokfelt O Edfors and T Maseng ldquoA turbo code interleaverdesign criterion base on the performance of iterative decodingrdquoIEEE Communication Letters vol 5 no 2 pp 52ndash54 2001
[11] L R Bahl J Cocke F Jelinek and J Raviv ldquoOptimal decodingof linear codes for minimizing symbol error raterdquo IEEE Trans-actions on Information Theory vol IT-20 no 2 pp 284ndash2871974
[12] C Carbonelli S Vedantam and U Mitra ldquoSparse channelestimation with zero tap detectionrdquo in Proceedings of the IEEEInternational Conference on Communications vol 6 pp 3173ndash3177 Paris France June 2004
[13] V TarokhANaguibN Seshadri andA R Calderbank ldquoCom-bined array processing and space-time codingrdquo IEEE Transac-tions on Information Theory vol 45 no 4 pp 1121ndash1128 1999
[14] G D Golden C J Foschini R A Valenzuela and P WWolni-ansky ldquoDetection algorithm and initial laboratory results usingV-BLAST space-time communication architecturerdquo ElectronicsLetters vol 35 no 1 pp 14ndash16 1998
[15] PWWolniansky G J Foschini G D Golden and R A Valen-zuela ldquoV-BLAST an architecture for realizing very high datarates over the rich-scattering wireless channelrdquo in Proceedingsof the URSI International Symposium on Signals Systems andElectronics (ISSSE rsquo98) pp 295ndash300 Pisa Italy October 1998
[16] V Tarokh N Seshadri and A R Calderbank ldquoSpace-timecodes for high data rate wireless communication performancecriterion and code constructionrdquo IEEE Transactions on Infor-mation Theory vol 44 no 2 pp 744ndash765 1998
[17] S Roy T M Duman V McDonald and J G Proakis ldquoHigh-rate communication for underwater acoustic channels usingmultiple transmitters and spacemdashtime coding receiver struc-tures and experimental resultsrdquo IEEE Journal of Oceanic Engi-neering vol 32 no 3 pp 663ndash688 2007
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of