Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 316827 8 pageshttpdxdoiorg1011552013316827
Research ArticleOn PID Controller Design by Combining Pole PlacementTechnique with Symmetrical Optimum Criterion
Viorel Nicolau
ldquoDunarea de Josrdquo University of Galati 47 Domneasca Street 800008 Galati Romania
Correspondence should be addressed to Viorel Nicolau viorelnicolauugalro
Received 10 April 2013 Revised 8 July 2013 Accepted 8 July 2013
Academic Editor Cristian Toma
Copyright copy 2013 Viorel NicolauThis is an open access article distributed under theCreativeCommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In this paper aspects of analytical design of PID controllers are studied by combining pole placement technique with symmetricaloptimum criterion The proposed method is based on low-order plant model with pure integrator and it can be used for both fastand slow processes Starting from the desired closed-loop transfer function which contains a second-order oscillating system anda lead-lag compensator it is shown that the zero value depends on the real-pole value of closed-loop transfer function In additionthere is only one pole value which satisfies the assumptions of symmetrical optimum criterion imposed to open-loop transferfunction In these conditions by combining the pole placement technique with symmetrical optimum criterion the analyticalexpressions of the controller parameters can be simplified For simulations PID autopilot design for heading control problem of aconventional ship is considered
1 Introduction
PID controllers are widespread in industry being the mostpopular ones for decades Hence even small improvementsin PID design could have major impact worldwide [1]There are many theoretical and practical papers on PIDtuning algorithms in time and frequency domain They areusing analytical [1ndash5] graphical [6ndash8] or empirical methodsincluding artificial intelligence [9 10]
Analytical methods rely on low-order plant modelscharacterized by small number of parameters Two reducedplant models are mostly used pure integrator plus first-order model like those for thermal and electromechanicalprocesses and the first-order plus dead-time model like inchemical processes respectively [11]
The proposed analytical method in the paper is based onlow-order plant model with pure integrator and it can beused for both fast and slow processes An application exampleis discussed for autopilot design of conventional ships incourse-keeping or course-changing control problems
Pole placement technique (PPT) [12ndash14] and symmetricaloptimum criterion (SOC) [15ndash18] were intensively studied asseparated methods on both types of reduced plant modelsmentioned above
If PPT is used to synthesize the PID controller the firststep is to specify some performance conditions of the closed-loop system which lead to the analytical expression of theclosed-loop transfer function (CLTF) The PID parametersdepend on the CLTF and plant model parameters In generalthe closed-loop system is approximated by a second orderreference model If the plant model has pure integratorelement and PID type is desired for the controller then theCLTF must contain an additional lead-lag compensator Inthis case the reference model has four parameters two fromthe second order reference model and the other two fromthe compensator All these parameters are present in theanalytical expressions of PID controller In addition if thewell known symmetrical optimum criterion [6] is used theparameters of compensator have particular values as statedin the paper which simplify the PID parameters
2 Mathematical Problems in Engineering
By combining the pole placement technique with sym-metrical optimum criterion the analytical expressions of thePID parameters depend only on the parameters of the plantand second order reference models
In this paper PID autopilot design for heading controlproblem of a conventional ship is considered in simulationsThe ship model is obtained from the equations describingthe horizontal motion of the ship expressing conservationof hydrodynamic forces and moments For ship dynamicsmodeling which characterize a slow process the first type ofreduced model is used with pure integrator plus first-ordermodel
The autopilot must assure performance conditions inboth course-keeping and course-changing control problemsIt must be PID type to assure null stationary error forboth step and ramp variations on reference and disturbancesinputs [19 20] Thus in course-keeping control the PIDautopilot can compensate the stationary error (eg drifteffect) generated by constant or slowly time-variable distur-bances (eg wind sea currents) Also in course-changingcontrol problems PID autopilot can act as a tracking systemto a desired trajectory consisting of line segments [21]
As a result the reference model contains a second-orderoscillating system and a lead-lag compensator with realnegative values for pole-zero pair and the open-loop transferfunction (OLTF) contains a double-integrator element
The goal of this paper is to find the simplified analyticalexpressions of PID controller parameters which satisfy twosimultaneous conditions the desired behavior of closed-loopsystem and symmetrical characteristics of the open-looptransfer function Applying PPT the controller parametersdepend on the parameters of the plant and closed-looptransfer functions The resulting open-loop transfer functioncontains a double-integrator element and a pole-zero pairwith real negative values Hence the symmetrical optimumcriterion can be used Imposing symmetrical characteristicsof the open-loop transfer function which can be obtainedin certain conditions stated in the paper the analyticalexpressions of the controller parameters can be simplified
The paper is organized as follows Section 2 providesmathematical models for the plant PID controller andreference closed-loop system used in simulations for bothfast and slow processes In Section 3 the PID controller syn-thesis using PPT is presented The analytical expressions ofcontroller parameters are simplified in Section 4 by imposingsymmetrical characteristics of OLTF Section 5 describes thesimulation results using a PID autopilot for heading controlof a ship Conclusions are presented in Section 6
2 Mathematical Models
Mathematical models for plant PID controller and referenceclosed-loop system used in simulations are discussed in thissection The classical factorized forms of transfer functionsare considered to express poles and zeros based on whichpole placement technique and symmetrical optimum crite-rion can be used
In the paper a low-order plantmodel with pure integratoris considered for both fast and slow processesThe controlleris of PID type being imposed by performance conditionsof closed-loop system which are detailed at the end of thissection
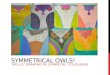
The classical structure of the control loop for a linearSISO process without disturbances is illustrated in Figure 1
The plant has a low-order model which contains a pureintegrator It is characterized by a dominant time constant(119879119875) and a gain coefficient (119896
119875) The analytical expressions of
plant model and PID controller depend on the process typefast or slow [22]
(a) If the process is fast then the small time constants cannot be neglected An equivalent small time constant (119879
Σ) is
added to the model corresponding to the sum of parasitictime constants
119867119875 (119904) =
119896119875
119904 sdot (119904119879119875+ 1) sdot (119904119879
Σ+ 1)
(1)
where 119879Σlt 119879119875
In this case the PID controller is of the following form
119867119862 (119904) =
119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot (119904119879
1015840
119862+ 1) (2)
where 119879Σlt 1198791015840
119862lt 119879119862
The open-loop transfer function119867(119904) = 119867119862(119904) sdot119867
119875(119904) is
as follows
119867(119904) =119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot119896119875
119904 sdot (119904119879119875+ 1) sdot (119904119879
Σ+ 1)
(3)
Using pole cancellation the nonzero dominant pole of theplant model is cancelled by choosing 1198791015840
119862= 119879119875Thus only two
controller parameters must be determined 119896119862and 119879
119862
It can be observed that if the process does not have anynon-zero dominant pole (model without time constant 119879
119875)
then the controller is of PI type (without time constant 1198791015840119862)
and the same parameters must be determined (119896119862and 119879
119862)
(b) If the process is slow the equivalent small time constantcan be neglected (119879
Σ≪ 119879119875) and the plant model is as follows
119867119875 (119904) =
119896119875
119904 sdot (119904119879119875+ 1)
(4)
In this case the PID controller contains a supplementarydegree of freedom and it is of the following form
119867119862 (119904) =
119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot
1199041198791015840
119862+ 1
1199041198791+ 1
(5)
where 1198791lt 1198791015840
119862lt 119879119862
The open-loop transfer function for slow process is asfollows
119867(119904) =119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot
1199041198791015840
119862+ 1
1199041198791+ 1
sdot119896119875
119904 sdot (119904119879119875+ 1)
(6)
Mathematical Problems in Engineering 3
Controller Plant
r+
minus
yu HP(s)
(withintegrator)
120576 HC(s)
(PID)
Figure 1 Classical structure of the control loop
Again the non-zero dominant pole of the plant model iscancelled using pole cancellation resulting 1198791015840
119862= 119879119875 In this
case three controller parametersmust be determined 119896119862119879119862
and 1198791 This is a more general case due to the time constant
1198791 which is not imposed by the process and it can be chosen
Therefore in this paper the plant model given in (4) is usedfor simulations but discussions include both plant modelsgiven in (1) and (4)
The open-loop transfer functions given in (3) and (6)have similar expressions after pole cancellation
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =119896119862sdot 119896119875sdot (119904119879119862+ 1)
1199042119879119862sdot (119904119879 + 1)
(7)
where the time constant119879 has different meanings dependingon the type of process considered In the first case for fastprocesses it represents the equivalent small time constantimposed by the process (119879 = 119879
Σ) while in the second case
it is a controller parameter (119879 = 1198791)
In general the behavior of the closed-loop system isapproximated by a second order reference model
1198670 (119904) =
1205962
0
1199042 + 21205771205960119904 + 1205962
0
(8)
where 1205960gt 0 is the natural frequency and 120577 gt 0 is
the damping coefficient The performance conditions of theclosed-loop system can be specified by imposing the modelparameters (120577 and 120596
0)
Starting from the plant model with pure integrator andconsidering the reference model from (8) it results a real-PDcontroller The corresponding OLTF is as follows
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0
119904 (119904 + 21205771205960) (9)
It can be observed that the open-loop transfer functioncorresponding to CLTF presented in (8) has one pureintegrator which assures null stationary error only for stepvariations of reference input denoted 119903 in Figure 1
If the controller must assure null stationary error forboth step and ramp variations on reference and disturbancesinputs then the controller must be PID type In this casethe open-loop transfer function contains a double-integratorelement one being included from the plant model and theother one from the PID controller The resulted OLTF hasthe general form expressed in (7) which cannot be generatedfrom the reference model given in (8)
To obtain the expression of OLTF given in (7) the refer-ence model must be completed with a lead-lag compensator
which contains a pole-zero pair with real and negative values[22]
1198670 (119904) =
1198960sdot (119904 + 119911)
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 119901)
(10)
where 119911 gt 0 119901 gt 0 and 1198960= 1205962
0sdot 119901119911 so that |119867
0(0)| = 1
Particular values for pole-zero pair of lead-lag compen-sator simplify the analytical expressions of the controllerparameters as stated in the next sections In additionsymmetrical characteristics of OLTF are obtained
3 Aspects of PID Controller Design Using PolePlacement Technique
In this section existence conditions of parameters of CLTFare discussed and PID parameters are determined based onPPT [19] Consider the control structure shown in Figure 1with the OLTF given in (7) and the desired CLTF in (10)
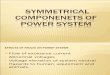
Proposition 1 For every value of the pole (119904 = minus119901) in thedesired closed-loop transfer function given in (10) there is onlyone zero value (119904 = minus119911) for which the open-loop transferfunction has a double-pole in origin and in addition the zerofrequency is smaller than the pole frequency 119911 lt 119901
Proof The proposition demonstration includes the nextlemma results
Lemma 2 The necessary and sufficient condition for theexistence of a double-pole in origin for the open-loop transferfunction of a control system illustrated in Figure 1 starting froma desired CLTF of the form given in (10) is as follows
2120577119901119911 + 1205960119911 minus 1205960119901 = 0 (11)
Proof The transfer function of the open-loop system can becomputed starting from the desired CLTF
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0sdot 119901119911 sdot (119904 + 119911)
1199043 + 1199042 (119901 + 21205771205960) + 119904 [2120577120596
0119901 + 120596
2
0(1 minus 119901119911)]
(12)
From (12) it can be observed that a double-pole in originis obtained for every frequency if and only if the coefficientof the third term of denominator is null
21205771205960119901 + 120596
2
0(1 minus
119901
119911) = 0 (13)
which is equivalent with equation in (11) for 1205960= 0
As a result the unique zero value results whose expres-sion depends on the selected pole value
119904 = minus119911 = minus1205960119901
2120577119901 + 1205960
forall119901 1205960 120577 gt 0 (14)
4 Mathematical Problems in Engineering
For every frequency (119901) of the pole the correspondingfrequency (119911) of the zero given in (14) is smaller
119911 =1205960119901
2120577119901 + 1205960
lt 119901 forall119901 1205960 120577 gt 0 (15)
In this case the real values of pole-zero pair and conjugatecomplex poles of the desired CLTF given in (10) are illus-trated in the complex plane in Figure 2
Using (13) and (15) in (12) the expression of the open-looptransfer function is obtained
119867(119904) =1205960sdot (2120577119901 + 120596
0) sdot (119904 + (120596
0119901 (2120577119901 + 120596
0)))
1199042 sdot [119904 + (119901 + 21205771205960)]
(16)
The zero and pole frequencies of the open-loop transferfunction are denoted by 120596
119911and 120596
119901 respectively
120596119911=
1205960119901
2120577119901 + 1205960
= 119911 120596119901= 2120577120596
0+ 119901 (17)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205960(2120577119901 + 120596
0) sdot (119904 + 120596
119911)
1199042 sdot [119904 + 120596119901]
(18)
Putting into evidence the time constants the open-looptransfer function can be rewritten like in (7)
119867(119904) =1205962
0119901 sdot (119904 ((2120577119901 + 120596
0) 1205960119901) + 1)
1199042 (21205771205960+ 119901) (119904 (1 (2120577120596
0+ 119901)) + 1)
(19)
EqualingOLTFwithout pole cancellation from (3) or (7)with (19) an equality of two polynomials of 3rd order in 119904variable is obtained
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) sdot (119904119879
119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot (1199041
21205771205960+ 119901
+ 1)
= 119879119862sdot 1205962
0119901 sdot (119904119879 + 1) sdot (119904119879119875 + 1) sdot (119904
2120577119901 + 1205960
1205960119901
+ 1)
(20)
where 119879 = 119879Σor 119879 = 119879
1 depending on the plant model
Because the equality must be true for every frequency itresults a four equation system
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) = 119879
119862sdot 1205962
0119901 (21a)
119879119862sdot 1198791015840
119862sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875sdot2120577119901 + 120596
0
1205960119901
(21b)
119879119862sdot 1198791015840
119862+ (119879119862+ 1198791015840
119862) sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875+ (119879 + 119879
119875) sdot2120577119901 + 120596
0
1205960119901
(21c)
119879119862+ 1198791015840
119862+
1
21205771205960+ 119901
= 119879 + 119879119875+2120577119901 + 120596
0
1205960119901
(21d)
s = minus1205960p
2120577p + 1205960
s = minusp minus1205771205960
1205960
s = p1
s = p2
Re
Im
Figure 2 Poles and zero of desired CLTF given in (10)
The solutions of the equation system are the PID con-troller parameters [19]
119896119862=1205960
119896119875
sdot2120577119901 + 120596
0
21205771205960+ 119901 (22a)
119879119862=2120577119901 + 120596
0
1205960119901
=1
120596119911
(22b)
1198791015840
119862= 119879119875 (22c)
119879 =1
21205771205960+ 119901
=1
120596119901
(22d)
It can be observed that the solution (22c) represents thepole cancellation condition and it does not depend on the 119901pole value
If a fast process is considered then the time constant 119879given in (22d) represents the equivalent small time constantof the plant model (119879 = 119879
Σ) If the process is slow then the
same time constant 119879 is a controller parameter (119879 = 1198791)
The time constants must satisfy the inequalities
119879 lt 1198791015840
119862lt 119879119862 (23)
This can be transposed into frequency domain
120596119911lt1
119879119875
lt 120596119901 (24)
Using (17) in (24) a system of 2 inequalities is obtained
21205771205960+ 119901 gt
1
119879119875
(25a)
2120577119901 + 1205960gt 1199011205960119879119875 (25b)
The reference model must be chosen so that the parame-ters of closed-loop transfer function (120596
0 120577 and 119901) satisfy this
system of inequalities
4 Design Aspects by Imposing SymmetricalCharacteristics of OLTF
After applying PPT the parameters of PID controller dependon the CLTF parameters (120596
0 120577 and 119901) In general 120596
0and 120577
Mathematical Problems in Engineering 5
characterize the desired behavior of the closed-loop systemand they have fixed values while the pole value can be chosenSpecific pole values can be imposed by using supplementaryconditions In this paper the conditions for choosing thepole value refer to the symmetrical optimum criterion whichsimplify the expressions of PID parameters
The goal is to find that pole value of the CLTF whichsatisfies the assumptions of symmetrical optimum criterionaround natural frequency 120596
0 for the transfer function of
open-loop system given in (16) Using this value the expres-sions of PIDparameters given in (22a) (22b) (22c) and (22d)are simplified
Proposition 3 There is only one admissible value for the pole(119904 = minus119901) of CLTF given in (10) so that the corresponding OLTFgiven in (16) has symmetrical characteristics around 120596
0 and
this value is as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (26)
Proof For the specified open-loop transfer function onlythe symmetry of magnitude-frequency characteristic aroundnatural frequency 120596
0must be imposed as it implies also the
symmetry of phase-frequency characteristicThe general form of the symmetrical optimum criterion
imposes two conditions for magnitude-frequency character-istic of OLTF
(a) cross-over frequency 1205960must be equally placed between
zero and pole frequencies on the 10-base logarithmic scale
1205960
120596119911
=
120596119901
1205960
(27)
(b) for cross-over frequency 1205960 the magnitude-frequency
characteristic of OLTF must have 0 dB1003816100381610038161003816119867 (1198951205960)
1003816100381610038161003816 = 1 (28)
Using (17) in (27) the first condition in 119901 variable is asfollows
1205960119901
2120577119901 + 1205960
sdot (21205771205960+ 119901) = 120596
2
0lArrrArr 119901
2= 1205962
0 (29)
From (29) the solution results are as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (30)
Therefore the condition given in (27) is satisfied if andonly if 119901 = 120596
0
For the second condition in (28) the magnitude of open-loop transfer function in frequency120596
0is computed from (18)
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =
(2120577119901 + 1205960) sdot radic1205962
119911+ 1205962
0
1205960sdot radic1205962
119901+ 1205962
0
(31)
The frequencies 120596119911and 120596
119875are replaced with their
expressions from (17) resulting the following
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =radic1199012+ 1205962
0+ 4120577119901120596
0+ 412057721199012
1199012 + 1205962
0+ 4120577119901120596
0+ 41205772120596
2
0
(32)
Using (32) in (28) the same solution in (30) is obtained1199012= 1205962
0hArr 119901 = 120596
0 forall119901 120596
0 120577 gt 0
Using (30) in (15) it results the following
119901 = 1205960997904rArr 119911 =
1205960
2120577 + 1 (33)
The expression of CLTF becomes
1198670 (119904) =
1205962
0sdot (2120577 + 1) sdot (119904 + (1205960 (2120577 + 1)))
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 120596
0)
(34)
From (17) the zero and pole frequencies of OLTF are
120596119911=
1205960
2120577 + 1 120596
119901= 1205960sdot (2120577 + 1) (35)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205962
0(2120577 + 1) sdot (119904 + (12059602120577 + 1))
1199042 sdot [119904 + 1205960 (2120577 + 1)]
(36)
The real values of pole-zero pair and complex conjugatepoles of the CLTF given in (34) are illustrated in Figure 3
The position of the zero 119904 = minus119911 depends on 120577 parameterThree situations are possible
(i) if 120577 isin (0 12) then minus1205960lt minus119911 lt minus120577120596
0and the zero is
placed between the two points 119904 = minus1205960and 119904 = minus120577120596
0
respectively(ii) if 120577 = 12 then minus119911 = minus120577120596
0This is the particular case
of the Kesslerrsquos symmetrical optimummethod [6](iii) if 120577 gt 12 then 0 gt minus119911 gt minus120577120596
0and the zero is placed
to the right of the point 119904 = minus1205771205960 This is the case
illustrated in Figure 3
Knowing the pole value of CLTF 119901 = 1205960 the simplified
parameters of PID controller result from (22a) (22b) (22c)and (22d)
119896119862=1205960
119896119875
(37a)
119879119862=2120577 + 1
1205960
(37b)
1198791015840
119862= 119879119875 (37c)
119879 =1
(2120577 + 1) sdot 1205960
(37d)
In this case the system of inequalities from (25a) and(25b) is simpler including only 2 variables from referencemodel (120596
0and 120577)
(2120577 + 1) sdot 1205960 gt1
119879119875
(38a)
2120577 + 1
1205960
gt 119879119875 (38b)
6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
By combining the pole placement technique with sym-metrical optimum criterion the analytical expressions of thePID parameters depend only on the parameters of the plantand second order reference models
In this paper PID autopilot design for heading controlproblem of a conventional ship is considered in simulationsThe ship model is obtained from the equations describingthe horizontal motion of the ship expressing conservationof hydrodynamic forces and moments For ship dynamicsmodeling which characterize a slow process the first type ofreduced model is used with pure integrator plus first-ordermodel
The autopilot must assure performance conditions inboth course-keeping and course-changing control problemsIt must be PID type to assure null stationary error forboth step and ramp variations on reference and disturbancesinputs [19 20] Thus in course-keeping control the PIDautopilot can compensate the stationary error (eg drifteffect) generated by constant or slowly time-variable distur-bances (eg wind sea currents) Also in course-changingcontrol problems PID autopilot can act as a tracking systemto a desired trajectory consisting of line segments [21]
As a result the reference model contains a second-orderoscillating system and a lead-lag compensator with realnegative values for pole-zero pair and the open-loop transferfunction (OLTF) contains a double-integrator element
The goal of this paper is to find the simplified analyticalexpressions of PID controller parameters which satisfy twosimultaneous conditions the desired behavior of closed-loopsystem and symmetrical characteristics of the open-looptransfer function Applying PPT the controller parametersdepend on the parameters of the plant and closed-looptransfer functions The resulting open-loop transfer functioncontains a double-integrator element and a pole-zero pairwith real negative values Hence the symmetrical optimumcriterion can be used Imposing symmetrical characteristicsof the open-loop transfer function which can be obtainedin certain conditions stated in the paper the analyticalexpressions of the controller parameters can be simplified
The paper is organized as follows Section 2 providesmathematical models for the plant PID controller andreference closed-loop system used in simulations for bothfast and slow processes In Section 3 the PID controller syn-thesis using PPT is presented The analytical expressions ofcontroller parameters are simplified in Section 4 by imposingsymmetrical characteristics of OLTF Section 5 describes thesimulation results using a PID autopilot for heading controlof a ship Conclusions are presented in Section 6
2 Mathematical Models
Mathematical models for plant PID controller and referenceclosed-loop system used in simulations are discussed in thissection The classical factorized forms of transfer functionsare considered to express poles and zeros based on whichpole placement technique and symmetrical optimum crite-rion can be used
In the paper a low-order plantmodel with pure integratoris considered for both fast and slow processesThe controlleris of PID type being imposed by performance conditionsof closed-loop system which are detailed at the end of thissection
The classical structure of the control loop for a linearSISO process without disturbances is illustrated in Figure 1
The plant has a low-order model which contains a pureintegrator It is characterized by a dominant time constant(119879119875) and a gain coefficient (119896
119875) The analytical expressions of
plant model and PID controller depend on the process typefast or slow [22]
(a) If the process is fast then the small time constants cannot be neglected An equivalent small time constant (119879
Σ) is
added to the model corresponding to the sum of parasitictime constants
119867119875 (119904) =
119896119875
119904 sdot (119904119879119875+ 1) sdot (119904119879
Σ+ 1)
(1)
where 119879Σlt 119879119875
In this case the PID controller is of the following form
119867119862 (119904) =
119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot (119904119879
1015840
119862+ 1) (2)
where 119879Σlt 1198791015840
119862lt 119879119862
The open-loop transfer function119867(119904) = 119867119862(119904) sdot119867
119875(119904) is
as follows
119867(119904) =119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot119896119875
119904 sdot (119904119879119875+ 1) sdot (119904119879
Σ+ 1)
(3)
Using pole cancellation the nonzero dominant pole of theplant model is cancelled by choosing 1198791015840
119862= 119879119875Thus only two
controller parameters must be determined 119896119862and 119879
119862
It can be observed that if the process does not have anynon-zero dominant pole (model without time constant 119879
119875)
then the controller is of PI type (without time constant 1198791015840119862)
and the same parameters must be determined (119896119862and 119879
119862)
(b) If the process is slow the equivalent small time constantcan be neglected (119879
Σ≪ 119879119875) and the plant model is as follows
119867119875 (119904) =
119896119875
119904 sdot (119904119879119875+ 1)
(4)
In this case the PID controller contains a supplementarydegree of freedom and it is of the following form
119867119862 (119904) =
119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot
1199041198791015840
119862+ 1
1199041198791+ 1
(5)
where 1198791lt 1198791015840
119862lt 119879119862
The open-loop transfer function for slow process is asfollows
119867(119904) =119896119862
119904119879119862
sdot (119904119879119862+ 1) sdot
1199041198791015840
119862+ 1
1199041198791+ 1
sdot119896119875
119904 sdot (119904119879119875+ 1)
(6)
Mathematical Problems in Engineering 3
Controller Plant
r+
minus
yu HP(s)
(withintegrator)
120576 HC(s)
(PID)
Figure 1 Classical structure of the control loop
Again the non-zero dominant pole of the plant model iscancelled using pole cancellation resulting 1198791015840
119862= 119879119875 In this
case three controller parametersmust be determined 119896119862119879119862
and 1198791 This is a more general case due to the time constant
1198791 which is not imposed by the process and it can be chosen
Therefore in this paper the plant model given in (4) is usedfor simulations but discussions include both plant modelsgiven in (1) and (4)
The open-loop transfer functions given in (3) and (6)have similar expressions after pole cancellation
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =119896119862sdot 119896119875sdot (119904119879119862+ 1)
1199042119879119862sdot (119904119879 + 1)
(7)
where the time constant119879 has different meanings dependingon the type of process considered In the first case for fastprocesses it represents the equivalent small time constantimposed by the process (119879 = 119879
Σ) while in the second case
it is a controller parameter (119879 = 1198791)
In general the behavior of the closed-loop system isapproximated by a second order reference model
1198670 (119904) =
1205962
0
1199042 + 21205771205960119904 + 1205962
0
(8)
where 1205960gt 0 is the natural frequency and 120577 gt 0 is
the damping coefficient The performance conditions of theclosed-loop system can be specified by imposing the modelparameters (120577 and 120596
0)
Starting from the plant model with pure integrator andconsidering the reference model from (8) it results a real-PDcontroller The corresponding OLTF is as follows
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0
119904 (119904 + 21205771205960) (9)
It can be observed that the open-loop transfer functioncorresponding to CLTF presented in (8) has one pureintegrator which assures null stationary error only for stepvariations of reference input denoted 119903 in Figure 1
If the controller must assure null stationary error forboth step and ramp variations on reference and disturbancesinputs then the controller must be PID type In this casethe open-loop transfer function contains a double-integratorelement one being included from the plant model and theother one from the PID controller The resulted OLTF hasthe general form expressed in (7) which cannot be generatedfrom the reference model given in (8)
To obtain the expression of OLTF given in (7) the refer-ence model must be completed with a lead-lag compensator
which contains a pole-zero pair with real and negative values[22]
1198670 (119904) =
1198960sdot (119904 + 119911)
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 119901)
(10)
where 119911 gt 0 119901 gt 0 and 1198960= 1205962
0sdot 119901119911 so that |119867
0(0)| = 1
Particular values for pole-zero pair of lead-lag compen-sator simplify the analytical expressions of the controllerparameters as stated in the next sections In additionsymmetrical characteristics of OLTF are obtained
3 Aspects of PID Controller Design Using PolePlacement Technique
In this section existence conditions of parameters of CLTFare discussed and PID parameters are determined based onPPT [19] Consider the control structure shown in Figure 1with the OLTF given in (7) and the desired CLTF in (10)
Proposition 1 For every value of the pole (119904 = minus119901) in thedesired closed-loop transfer function given in (10) there is onlyone zero value (119904 = minus119911) for which the open-loop transferfunction has a double-pole in origin and in addition the zerofrequency is smaller than the pole frequency 119911 lt 119901
Proof The proposition demonstration includes the nextlemma results
Lemma 2 The necessary and sufficient condition for theexistence of a double-pole in origin for the open-loop transferfunction of a control system illustrated in Figure 1 starting froma desired CLTF of the form given in (10) is as follows
2120577119901119911 + 1205960119911 minus 1205960119901 = 0 (11)
Proof The transfer function of the open-loop system can becomputed starting from the desired CLTF
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0sdot 119901119911 sdot (119904 + 119911)
1199043 + 1199042 (119901 + 21205771205960) + 119904 [2120577120596
0119901 + 120596
2
0(1 minus 119901119911)]
(12)
From (12) it can be observed that a double-pole in originis obtained for every frequency if and only if the coefficientof the third term of denominator is null
21205771205960119901 + 120596
2
0(1 minus
119901
119911) = 0 (13)
which is equivalent with equation in (11) for 1205960= 0
As a result the unique zero value results whose expres-sion depends on the selected pole value
119904 = minus119911 = minus1205960119901
2120577119901 + 1205960
forall119901 1205960 120577 gt 0 (14)
4 Mathematical Problems in Engineering
For every frequency (119901) of the pole the correspondingfrequency (119911) of the zero given in (14) is smaller
119911 =1205960119901
2120577119901 + 1205960
lt 119901 forall119901 1205960 120577 gt 0 (15)
In this case the real values of pole-zero pair and conjugatecomplex poles of the desired CLTF given in (10) are illus-trated in the complex plane in Figure 2
Using (13) and (15) in (12) the expression of the open-looptransfer function is obtained
119867(119904) =1205960sdot (2120577119901 + 120596
0) sdot (119904 + (120596
0119901 (2120577119901 + 120596
0)))
1199042 sdot [119904 + (119901 + 21205771205960)]
(16)
The zero and pole frequencies of the open-loop transferfunction are denoted by 120596
119911and 120596
119901 respectively
120596119911=
1205960119901
2120577119901 + 1205960
= 119911 120596119901= 2120577120596
0+ 119901 (17)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205960(2120577119901 + 120596
0) sdot (119904 + 120596
119911)
1199042 sdot [119904 + 120596119901]
(18)
Putting into evidence the time constants the open-looptransfer function can be rewritten like in (7)
119867(119904) =1205962
0119901 sdot (119904 ((2120577119901 + 120596
0) 1205960119901) + 1)
1199042 (21205771205960+ 119901) (119904 (1 (2120577120596
0+ 119901)) + 1)
(19)
EqualingOLTFwithout pole cancellation from (3) or (7)with (19) an equality of two polynomials of 3rd order in 119904variable is obtained
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) sdot (119904119879
119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot (1199041
21205771205960+ 119901
+ 1)
= 119879119862sdot 1205962
0119901 sdot (119904119879 + 1) sdot (119904119879119875 + 1) sdot (119904
2120577119901 + 1205960
1205960119901
+ 1)
(20)
where 119879 = 119879Σor 119879 = 119879
1 depending on the plant model
Because the equality must be true for every frequency itresults a four equation system
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) = 119879
119862sdot 1205962
0119901 (21a)
119879119862sdot 1198791015840
119862sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875sdot2120577119901 + 120596
0
1205960119901
(21b)
119879119862sdot 1198791015840
119862+ (119879119862+ 1198791015840
119862) sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875+ (119879 + 119879
119875) sdot2120577119901 + 120596
0
1205960119901
(21c)
119879119862+ 1198791015840
119862+
1
21205771205960+ 119901
= 119879 + 119879119875+2120577119901 + 120596
0
1205960119901
(21d)
s = minus1205960p
2120577p + 1205960
s = minusp minus1205771205960
1205960
s = p1
s = p2
Re
Im
Figure 2 Poles and zero of desired CLTF given in (10)
The solutions of the equation system are the PID con-troller parameters [19]
119896119862=1205960
119896119875
sdot2120577119901 + 120596
0
21205771205960+ 119901 (22a)
119879119862=2120577119901 + 120596
0
1205960119901
=1
120596119911
(22b)
1198791015840
119862= 119879119875 (22c)
119879 =1
21205771205960+ 119901
=1
120596119901
(22d)
It can be observed that the solution (22c) represents thepole cancellation condition and it does not depend on the 119901pole value
If a fast process is considered then the time constant 119879given in (22d) represents the equivalent small time constantof the plant model (119879 = 119879
Σ) If the process is slow then the
same time constant 119879 is a controller parameter (119879 = 1198791)
The time constants must satisfy the inequalities
119879 lt 1198791015840
119862lt 119879119862 (23)
This can be transposed into frequency domain
120596119911lt1
119879119875
lt 120596119901 (24)
Using (17) in (24) a system of 2 inequalities is obtained
21205771205960+ 119901 gt
1
119879119875
(25a)
2120577119901 + 1205960gt 1199011205960119879119875 (25b)
The reference model must be chosen so that the parame-ters of closed-loop transfer function (120596
0 120577 and 119901) satisfy this
system of inequalities
4 Design Aspects by Imposing SymmetricalCharacteristics of OLTF
After applying PPT the parameters of PID controller dependon the CLTF parameters (120596
0 120577 and 119901) In general 120596
0and 120577
Mathematical Problems in Engineering 5
characterize the desired behavior of the closed-loop systemand they have fixed values while the pole value can be chosenSpecific pole values can be imposed by using supplementaryconditions In this paper the conditions for choosing thepole value refer to the symmetrical optimum criterion whichsimplify the expressions of PID parameters
The goal is to find that pole value of the CLTF whichsatisfies the assumptions of symmetrical optimum criterionaround natural frequency 120596
0 for the transfer function of
open-loop system given in (16) Using this value the expres-sions of PIDparameters given in (22a) (22b) (22c) and (22d)are simplified
Proposition 3 There is only one admissible value for the pole(119904 = minus119901) of CLTF given in (10) so that the corresponding OLTFgiven in (16) has symmetrical characteristics around 120596
0 and
this value is as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (26)
Proof For the specified open-loop transfer function onlythe symmetry of magnitude-frequency characteristic aroundnatural frequency 120596
0must be imposed as it implies also the
symmetry of phase-frequency characteristicThe general form of the symmetrical optimum criterion
imposes two conditions for magnitude-frequency character-istic of OLTF
(a) cross-over frequency 1205960must be equally placed between
zero and pole frequencies on the 10-base logarithmic scale
1205960
120596119911
=
120596119901
1205960
(27)
(b) for cross-over frequency 1205960 the magnitude-frequency
characteristic of OLTF must have 0 dB1003816100381610038161003816119867 (1198951205960)
1003816100381610038161003816 = 1 (28)
Using (17) in (27) the first condition in 119901 variable is asfollows
1205960119901
2120577119901 + 1205960
sdot (21205771205960+ 119901) = 120596
2
0lArrrArr 119901
2= 1205962
0 (29)
From (29) the solution results are as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (30)
Therefore the condition given in (27) is satisfied if andonly if 119901 = 120596
0
For the second condition in (28) the magnitude of open-loop transfer function in frequency120596
0is computed from (18)
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =
(2120577119901 + 1205960) sdot radic1205962
119911+ 1205962
0
1205960sdot radic1205962
119901+ 1205962
0
(31)
The frequencies 120596119911and 120596
119875are replaced with their
expressions from (17) resulting the following
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =radic1199012+ 1205962
0+ 4120577119901120596
0+ 412057721199012
1199012 + 1205962
0+ 4120577119901120596
0+ 41205772120596
2
0
(32)
Using (32) in (28) the same solution in (30) is obtained1199012= 1205962
0hArr 119901 = 120596
0 forall119901 120596
0 120577 gt 0
Using (30) in (15) it results the following
119901 = 1205960997904rArr 119911 =
1205960
2120577 + 1 (33)
The expression of CLTF becomes
1198670 (119904) =
1205962
0sdot (2120577 + 1) sdot (119904 + (1205960 (2120577 + 1)))
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 120596
0)
(34)
From (17) the zero and pole frequencies of OLTF are
120596119911=
1205960
2120577 + 1 120596
119901= 1205960sdot (2120577 + 1) (35)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205962
0(2120577 + 1) sdot (119904 + (12059602120577 + 1))
1199042 sdot [119904 + 1205960 (2120577 + 1)]
(36)
The real values of pole-zero pair and complex conjugatepoles of the CLTF given in (34) are illustrated in Figure 3
The position of the zero 119904 = minus119911 depends on 120577 parameterThree situations are possible
(i) if 120577 isin (0 12) then minus1205960lt minus119911 lt minus120577120596
0and the zero is
placed between the two points 119904 = minus1205960and 119904 = minus120577120596
0
respectively(ii) if 120577 = 12 then minus119911 = minus120577120596
0This is the particular case
of the Kesslerrsquos symmetrical optimummethod [6](iii) if 120577 gt 12 then 0 gt minus119911 gt minus120577120596
0and the zero is placed
to the right of the point 119904 = minus1205771205960 This is the case
illustrated in Figure 3
Knowing the pole value of CLTF 119901 = 1205960 the simplified
parameters of PID controller result from (22a) (22b) (22c)and (22d)
119896119862=1205960
119896119875
(37a)
119879119862=2120577 + 1
1205960
(37b)
1198791015840
119862= 119879119875 (37c)
119879 =1
(2120577 + 1) sdot 1205960
(37d)
In this case the system of inequalities from (25a) and(25b) is simpler including only 2 variables from referencemodel (120596
0and 120577)
(2120577 + 1) sdot 1205960 gt1
119879119875
(38a)
2120577 + 1
1205960
gt 119879119875 (38b)
6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Controller Plant
r+
minus
yu HP(s)
(withintegrator)
120576 HC(s)
(PID)
Figure 1 Classical structure of the control loop
Again the non-zero dominant pole of the plant model iscancelled using pole cancellation resulting 1198791015840
119862= 119879119875 In this
case three controller parametersmust be determined 119896119862119879119862
and 1198791 This is a more general case due to the time constant
1198791 which is not imposed by the process and it can be chosen
Therefore in this paper the plant model given in (4) is usedfor simulations but discussions include both plant modelsgiven in (1) and (4)
The open-loop transfer functions given in (3) and (6)have similar expressions after pole cancellation
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =119896119862sdot 119896119875sdot (119904119879119862+ 1)
1199042119879119862sdot (119904119879 + 1)
(7)
where the time constant119879 has different meanings dependingon the type of process considered In the first case for fastprocesses it represents the equivalent small time constantimposed by the process (119879 = 119879
Σ) while in the second case
it is a controller parameter (119879 = 1198791)
In general the behavior of the closed-loop system isapproximated by a second order reference model
1198670 (119904) =
1205962
0
1199042 + 21205771205960119904 + 1205962
0
(8)
where 1205960gt 0 is the natural frequency and 120577 gt 0 is
the damping coefficient The performance conditions of theclosed-loop system can be specified by imposing the modelparameters (120577 and 120596
0)
Starting from the plant model with pure integrator andconsidering the reference model from (8) it results a real-PDcontroller The corresponding OLTF is as follows
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0
119904 (119904 + 21205771205960) (9)
It can be observed that the open-loop transfer functioncorresponding to CLTF presented in (8) has one pureintegrator which assures null stationary error only for stepvariations of reference input denoted 119903 in Figure 1
If the controller must assure null stationary error forboth step and ramp variations on reference and disturbancesinputs then the controller must be PID type In this casethe open-loop transfer function contains a double-integratorelement one being included from the plant model and theother one from the PID controller The resulted OLTF hasthe general form expressed in (7) which cannot be generatedfrom the reference model given in (8)
To obtain the expression of OLTF given in (7) the refer-ence model must be completed with a lead-lag compensator
which contains a pole-zero pair with real and negative values[22]
1198670 (119904) =
1198960sdot (119904 + 119911)
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 119901)
(10)
where 119911 gt 0 119901 gt 0 and 1198960= 1205962
0sdot 119901119911 so that |119867
0(0)| = 1
Particular values for pole-zero pair of lead-lag compen-sator simplify the analytical expressions of the controllerparameters as stated in the next sections In additionsymmetrical characteristics of OLTF are obtained
3 Aspects of PID Controller Design Using PolePlacement Technique
In this section existence conditions of parameters of CLTFare discussed and PID parameters are determined based onPPT [19] Consider the control structure shown in Figure 1with the OLTF given in (7) and the desired CLTF in (10)
Proposition 1 For every value of the pole (119904 = minus119901) in thedesired closed-loop transfer function given in (10) there is onlyone zero value (119904 = minus119911) for which the open-loop transferfunction has a double-pole in origin and in addition the zerofrequency is smaller than the pole frequency 119911 lt 119901
Proof The proposition demonstration includes the nextlemma results
Lemma 2 The necessary and sufficient condition for theexistence of a double-pole in origin for the open-loop transferfunction of a control system illustrated in Figure 1 starting froma desired CLTF of the form given in (10) is as follows
2120577119901119911 + 1205960119911 minus 1205960119901 = 0 (11)
Proof The transfer function of the open-loop system can becomputed starting from the desired CLTF
119867(119904) = 119867119862 (119904) sdot 119867119875 (119904) =1198670 (119904)
1 minus 1198670 (119904)
=1205962
0sdot 119901119911 sdot (119904 + 119911)
1199043 + 1199042 (119901 + 21205771205960) + 119904 [2120577120596
0119901 + 120596
2
0(1 minus 119901119911)]
(12)
From (12) it can be observed that a double-pole in originis obtained for every frequency if and only if the coefficientof the third term of denominator is null
21205771205960119901 + 120596
2
0(1 minus
119901
119911) = 0 (13)
which is equivalent with equation in (11) for 1205960= 0
As a result the unique zero value results whose expres-sion depends on the selected pole value
119904 = minus119911 = minus1205960119901
2120577119901 + 1205960
forall119901 1205960 120577 gt 0 (14)
4 Mathematical Problems in Engineering
For every frequency (119901) of the pole the correspondingfrequency (119911) of the zero given in (14) is smaller
119911 =1205960119901
2120577119901 + 1205960
lt 119901 forall119901 1205960 120577 gt 0 (15)
In this case the real values of pole-zero pair and conjugatecomplex poles of the desired CLTF given in (10) are illus-trated in the complex plane in Figure 2
Using (13) and (15) in (12) the expression of the open-looptransfer function is obtained
119867(119904) =1205960sdot (2120577119901 + 120596
0) sdot (119904 + (120596
0119901 (2120577119901 + 120596
0)))
1199042 sdot [119904 + (119901 + 21205771205960)]
(16)
The zero and pole frequencies of the open-loop transferfunction are denoted by 120596
119911and 120596
119901 respectively
120596119911=
1205960119901
2120577119901 + 1205960
= 119911 120596119901= 2120577120596
0+ 119901 (17)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205960(2120577119901 + 120596
0) sdot (119904 + 120596
119911)
1199042 sdot [119904 + 120596119901]
(18)
Putting into evidence the time constants the open-looptransfer function can be rewritten like in (7)
119867(119904) =1205962
0119901 sdot (119904 ((2120577119901 + 120596
0) 1205960119901) + 1)
1199042 (21205771205960+ 119901) (119904 (1 (2120577120596
0+ 119901)) + 1)
(19)
EqualingOLTFwithout pole cancellation from (3) or (7)with (19) an equality of two polynomials of 3rd order in 119904variable is obtained
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) sdot (119904119879
119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot (1199041
21205771205960+ 119901
+ 1)
= 119879119862sdot 1205962
0119901 sdot (119904119879 + 1) sdot (119904119879119875 + 1) sdot (119904
2120577119901 + 1205960
1205960119901
+ 1)
(20)
where 119879 = 119879Σor 119879 = 119879
1 depending on the plant model
Because the equality must be true for every frequency itresults a four equation system
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) = 119879
119862sdot 1205962
0119901 (21a)
119879119862sdot 1198791015840
119862sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875sdot2120577119901 + 120596
0
1205960119901
(21b)
119879119862sdot 1198791015840
119862+ (119879119862+ 1198791015840
119862) sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875+ (119879 + 119879
119875) sdot2120577119901 + 120596
0
1205960119901
(21c)
119879119862+ 1198791015840
119862+
1
21205771205960+ 119901
= 119879 + 119879119875+2120577119901 + 120596
0
1205960119901
(21d)
s = minus1205960p
2120577p + 1205960
s = minusp minus1205771205960
1205960
s = p1
s = p2
Re
Im
Figure 2 Poles and zero of desired CLTF given in (10)
The solutions of the equation system are the PID con-troller parameters [19]
119896119862=1205960
119896119875
sdot2120577119901 + 120596
0
21205771205960+ 119901 (22a)
119879119862=2120577119901 + 120596
0
1205960119901
=1
120596119911
(22b)
1198791015840
119862= 119879119875 (22c)
119879 =1
21205771205960+ 119901
=1
120596119901
(22d)
It can be observed that the solution (22c) represents thepole cancellation condition and it does not depend on the 119901pole value
If a fast process is considered then the time constant 119879given in (22d) represents the equivalent small time constantof the plant model (119879 = 119879
Σ) If the process is slow then the
same time constant 119879 is a controller parameter (119879 = 1198791)
The time constants must satisfy the inequalities
119879 lt 1198791015840
119862lt 119879119862 (23)
This can be transposed into frequency domain
120596119911lt1
119879119875
lt 120596119901 (24)
Using (17) in (24) a system of 2 inequalities is obtained
21205771205960+ 119901 gt
1
119879119875
(25a)
2120577119901 + 1205960gt 1199011205960119879119875 (25b)
The reference model must be chosen so that the parame-ters of closed-loop transfer function (120596
0 120577 and 119901) satisfy this
system of inequalities
4 Design Aspects by Imposing SymmetricalCharacteristics of OLTF
After applying PPT the parameters of PID controller dependon the CLTF parameters (120596
0 120577 and 119901) In general 120596
0and 120577
Mathematical Problems in Engineering 5
characterize the desired behavior of the closed-loop systemand they have fixed values while the pole value can be chosenSpecific pole values can be imposed by using supplementaryconditions In this paper the conditions for choosing thepole value refer to the symmetrical optimum criterion whichsimplify the expressions of PID parameters
The goal is to find that pole value of the CLTF whichsatisfies the assumptions of symmetrical optimum criterionaround natural frequency 120596
0 for the transfer function of
open-loop system given in (16) Using this value the expres-sions of PIDparameters given in (22a) (22b) (22c) and (22d)are simplified
Proposition 3 There is only one admissible value for the pole(119904 = minus119901) of CLTF given in (10) so that the corresponding OLTFgiven in (16) has symmetrical characteristics around 120596
0 and
this value is as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (26)
Proof For the specified open-loop transfer function onlythe symmetry of magnitude-frequency characteristic aroundnatural frequency 120596
0must be imposed as it implies also the
symmetry of phase-frequency characteristicThe general form of the symmetrical optimum criterion
imposes two conditions for magnitude-frequency character-istic of OLTF
(a) cross-over frequency 1205960must be equally placed between
zero and pole frequencies on the 10-base logarithmic scale
1205960
120596119911
=
120596119901
1205960
(27)
(b) for cross-over frequency 1205960 the magnitude-frequency
characteristic of OLTF must have 0 dB1003816100381610038161003816119867 (1198951205960)
1003816100381610038161003816 = 1 (28)
Using (17) in (27) the first condition in 119901 variable is asfollows
1205960119901
2120577119901 + 1205960
sdot (21205771205960+ 119901) = 120596
2
0lArrrArr 119901
2= 1205962
0 (29)
From (29) the solution results are as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (30)
Therefore the condition given in (27) is satisfied if andonly if 119901 = 120596
0
For the second condition in (28) the magnitude of open-loop transfer function in frequency120596
0is computed from (18)
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =
(2120577119901 + 1205960) sdot radic1205962
119911+ 1205962
0
1205960sdot radic1205962
119901+ 1205962
0
(31)
The frequencies 120596119911and 120596
119875are replaced with their
expressions from (17) resulting the following
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =radic1199012+ 1205962
0+ 4120577119901120596
0+ 412057721199012
1199012 + 1205962
0+ 4120577119901120596
0+ 41205772120596
2
0
(32)
Using (32) in (28) the same solution in (30) is obtained1199012= 1205962
0hArr 119901 = 120596
0 forall119901 120596
0 120577 gt 0
Using (30) in (15) it results the following
119901 = 1205960997904rArr 119911 =
1205960
2120577 + 1 (33)
The expression of CLTF becomes
1198670 (119904) =
1205962
0sdot (2120577 + 1) sdot (119904 + (1205960 (2120577 + 1)))
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 120596
0)
(34)
From (17) the zero and pole frequencies of OLTF are
120596119911=
1205960
2120577 + 1 120596
119901= 1205960sdot (2120577 + 1) (35)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205962
0(2120577 + 1) sdot (119904 + (12059602120577 + 1))
1199042 sdot [119904 + 1205960 (2120577 + 1)]
(36)
The real values of pole-zero pair and complex conjugatepoles of the CLTF given in (34) are illustrated in Figure 3
The position of the zero 119904 = minus119911 depends on 120577 parameterThree situations are possible
(i) if 120577 isin (0 12) then minus1205960lt minus119911 lt minus120577120596
0and the zero is
placed between the two points 119904 = minus1205960and 119904 = minus120577120596
0
respectively(ii) if 120577 = 12 then minus119911 = minus120577120596
0This is the particular case
of the Kesslerrsquos symmetrical optimummethod [6](iii) if 120577 gt 12 then 0 gt minus119911 gt minus120577120596
0and the zero is placed
to the right of the point 119904 = minus1205771205960 This is the case
illustrated in Figure 3
Knowing the pole value of CLTF 119901 = 1205960 the simplified
parameters of PID controller result from (22a) (22b) (22c)and (22d)
119896119862=1205960
119896119875
(37a)
119879119862=2120577 + 1
1205960
(37b)
1198791015840
119862= 119879119875 (37c)
119879 =1
(2120577 + 1) sdot 1205960
(37d)
In this case the system of inequalities from (25a) and(25b) is simpler including only 2 variables from referencemodel (120596
0and 120577)
(2120577 + 1) sdot 1205960 gt1
119879119875
(38a)
2120577 + 1
1205960
gt 119879119875 (38b)
6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
For every frequency (119901) of the pole the correspondingfrequency (119911) of the zero given in (14) is smaller
119911 =1205960119901
2120577119901 + 1205960
lt 119901 forall119901 1205960 120577 gt 0 (15)
In this case the real values of pole-zero pair and conjugatecomplex poles of the desired CLTF given in (10) are illus-trated in the complex plane in Figure 2
Using (13) and (15) in (12) the expression of the open-looptransfer function is obtained
119867(119904) =1205960sdot (2120577119901 + 120596
0) sdot (119904 + (120596
0119901 (2120577119901 + 120596
0)))
1199042 sdot [119904 + (119901 + 21205771205960)]
(16)
The zero and pole frequencies of the open-loop transferfunction are denoted by 120596
119911and 120596
119901 respectively
120596119911=
1205960119901
2120577119901 + 1205960
= 119911 120596119901= 2120577120596
0+ 119901 (17)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205960(2120577119901 + 120596
0) sdot (119904 + 120596
119911)
1199042 sdot [119904 + 120596119901]
(18)
Putting into evidence the time constants the open-looptransfer function can be rewritten like in (7)
119867(119904) =1205962
0119901 sdot (119904 ((2120577119901 + 120596
0) 1205960119901) + 1)
1199042 (21205771205960+ 119901) (119904 (1 (2120577120596
0+ 119901)) + 1)
(19)
EqualingOLTFwithout pole cancellation from (3) or (7)with (19) an equality of two polynomials of 3rd order in 119904variable is obtained
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) sdot (119904119879
119862+ 1) sdot (119904119879
1015840
119862+ 1)
sdot (1199041
21205771205960+ 119901
+ 1)
= 119879119862sdot 1205962
0119901 sdot (119904119879 + 1) sdot (119904119879119875 + 1) sdot (119904
2120577119901 + 1205960
1205960119901
+ 1)
(20)
where 119879 = 119879Σor 119879 = 119879
1 depending on the plant model
Because the equality must be true for every frequency itresults a four equation system
119896119875sdot 119896119862sdot (2120577120596
0+ 119901) = 119879
119862sdot 1205962
0119901 (21a)
119879119862sdot 1198791015840
119862sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875sdot2120577119901 + 120596
0
1205960119901
(21b)
119879119862sdot 1198791015840
119862+ (119879119862+ 1198791015840
119862) sdot
1
21205771205960+ 119901
= 119879 sdot 119879119875+ (119879 + 119879
119875) sdot2120577119901 + 120596
0
1205960119901
(21c)
119879119862+ 1198791015840
119862+
1
21205771205960+ 119901
= 119879 + 119879119875+2120577119901 + 120596
0
1205960119901
(21d)
s = minus1205960p
2120577p + 1205960
s = minusp minus1205771205960
1205960
s = p1
s = p2
Re
Im
Figure 2 Poles and zero of desired CLTF given in (10)
The solutions of the equation system are the PID con-troller parameters [19]
119896119862=1205960
119896119875
sdot2120577119901 + 120596
0
21205771205960+ 119901 (22a)
119879119862=2120577119901 + 120596
0
1205960119901
=1
120596119911
(22b)
1198791015840
119862= 119879119875 (22c)
119879 =1
21205771205960+ 119901
=1
120596119901
(22d)
It can be observed that the solution (22c) represents thepole cancellation condition and it does not depend on the 119901pole value
If a fast process is considered then the time constant 119879given in (22d) represents the equivalent small time constantof the plant model (119879 = 119879
Σ) If the process is slow then the
same time constant 119879 is a controller parameter (119879 = 1198791)
The time constants must satisfy the inequalities
119879 lt 1198791015840
119862lt 119879119862 (23)
This can be transposed into frequency domain
120596119911lt1
119879119875
lt 120596119901 (24)
Using (17) in (24) a system of 2 inequalities is obtained
21205771205960+ 119901 gt
1
119879119875
(25a)
2120577119901 + 1205960gt 1199011205960119879119875 (25b)
The reference model must be chosen so that the parame-ters of closed-loop transfer function (120596
0 120577 and 119901) satisfy this
system of inequalities
4 Design Aspects by Imposing SymmetricalCharacteristics of OLTF
After applying PPT the parameters of PID controller dependon the CLTF parameters (120596
0 120577 and 119901) In general 120596
0and 120577
Mathematical Problems in Engineering 5
characterize the desired behavior of the closed-loop systemand they have fixed values while the pole value can be chosenSpecific pole values can be imposed by using supplementaryconditions In this paper the conditions for choosing thepole value refer to the symmetrical optimum criterion whichsimplify the expressions of PID parameters
The goal is to find that pole value of the CLTF whichsatisfies the assumptions of symmetrical optimum criterionaround natural frequency 120596
0 for the transfer function of
open-loop system given in (16) Using this value the expres-sions of PIDparameters given in (22a) (22b) (22c) and (22d)are simplified
Proposition 3 There is only one admissible value for the pole(119904 = minus119901) of CLTF given in (10) so that the corresponding OLTFgiven in (16) has symmetrical characteristics around 120596
0 and
this value is as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (26)
Proof For the specified open-loop transfer function onlythe symmetry of magnitude-frequency characteristic aroundnatural frequency 120596
0must be imposed as it implies also the
symmetry of phase-frequency characteristicThe general form of the symmetrical optimum criterion
imposes two conditions for magnitude-frequency character-istic of OLTF
(a) cross-over frequency 1205960must be equally placed between
zero and pole frequencies on the 10-base logarithmic scale
1205960
120596119911
=
120596119901
1205960
(27)
(b) for cross-over frequency 1205960 the magnitude-frequency
characteristic of OLTF must have 0 dB1003816100381610038161003816119867 (1198951205960)
1003816100381610038161003816 = 1 (28)
Using (17) in (27) the first condition in 119901 variable is asfollows
1205960119901
2120577119901 + 1205960
sdot (21205771205960+ 119901) = 120596
2
0lArrrArr 119901
2= 1205962
0 (29)
From (29) the solution results are as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (30)
Therefore the condition given in (27) is satisfied if andonly if 119901 = 120596
0
For the second condition in (28) the magnitude of open-loop transfer function in frequency120596
0is computed from (18)
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =
(2120577119901 + 1205960) sdot radic1205962
119911+ 1205962
0
1205960sdot radic1205962
119901+ 1205962
0
(31)
The frequencies 120596119911and 120596
119875are replaced with their
expressions from (17) resulting the following
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =radic1199012+ 1205962
0+ 4120577119901120596
0+ 412057721199012
1199012 + 1205962
0+ 4120577119901120596
0+ 41205772120596
2
0
(32)
Using (32) in (28) the same solution in (30) is obtained1199012= 1205962
0hArr 119901 = 120596
0 forall119901 120596
0 120577 gt 0
Using (30) in (15) it results the following
119901 = 1205960997904rArr 119911 =
1205960
2120577 + 1 (33)
The expression of CLTF becomes
1198670 (119904) =
1205962
0sdot (2120577 + 1) sdot (119904 + (1205960 (2120577 + 1)))
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 120596
0)
(34)
From (17) the zero and pole frequencies of OLTF are
120596119911=
1205960
2120577 + 1 120596
119901= 1205960sdot (2120577 + 1) (35)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205962
0(2120577 + 1) sdot (119904 + (12059602120577 + 1))
1199042 sdot [119904 + 1205960 (2120577 + 1)]
(36)
The real values of pole-zero pair and complex conjugatepoles of the CLTF given in (34) are illustrated in Figure 3
The position of the zero 119904 = minus119911 depends on 120577 parameterThree situations are possible
(i) if 120577 isin (0 12) then minus1205960lt minus119911 lt minus120577120596
0and the zero is
placed between the two points 119904 = minus1205960and 119904 = minus120577120596
0
respectively(ii) if 120577 = 12 then minus119911 = minus120577120596
0This is the particular case
of the Kesslerrsquos symmetrical optimummethod [6](iii) if 120577 gt 12 then 0 gt minus119911 gt minus120577120596
0and the zero is placed
to the right of the point 119904 = minus1205771205960 This is the case
illustrated in Figure 3
Knowing the pole value of CLTF 119901 = 1205960 the simplified
parameters of PID controller result from (22a) (22b) (22c)and (22d)
119896119862=1205960
119896119875
(37a)
119879119862=2120577 + 1
1205960
(37b)
1198791015840
119862= 119879119875 (37c)
119879 =1
(2120577 + 1) sdot 1205960
(37d)
In this case the system of inequalities from (25a) and(25b) is simpler including only 2 variables from referencemodel (120596
0and 120577)
(2120577 + 1) sdot 1205960 gt1
119879119875
(38a)
2120577 + 1
1205960
gt 119879119875 (38b)
6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
characterize the desired behavior of the closed-loop systemand they have fixed values while the pole value can be chosenSpecific pole values can be imposed by using supplementaryconditions In this paper the conditions for choosing thepole value refer to the symmetrical optimum criterion whichsimplify the expressions of PID parameters
The goal is to find that pole value of the CLTF whichsatisfies the assumptions of symmetrical optimum criterionaround natural frequency 120596
0 for the transfer function of
open-loop system given in (16) Using this value the expres-sions of PIDparameters given in (22a) (22b) (22c) and (22d)are simplified
Proposition 3 There is only one admissible value for the pole(119904 = minus119901) of CLTF given in (10) so that the corresponding OLTFgiven in (16) has symmetrical characteristics around 120596
0 and
this value is as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (26)
Proof For the specified open-loop transfer function onlythe symmetry of magnitude-frequency characteristic aroundnatural frequency 120596
0must be imposed as it implies also the
symmetry of phase-frequency characteristicThe general form of the symmetrical optimum criterion
imposes two conditions for magnitude-frequency character-istic of OLTF
(a) cross-over frequency 1205960must be equally placed between
zero and pole frequencies on the 10-base logarithmic scale
1205960
120596119911
=
120596119901
1205960
(27)
(b) for cross-over frequency 1205960 the magnitude-frequency
characteristic of OLTF must have 0 dB1003816100381610038161003816119867 (1198951205960)
1003816100381610038161003816 = 1 (28)
Using (17) in (27) the first condition in 119901 variable is asfollows
1205960119901
2120577119901 + 1205960
sdot (21205771205960+ 119901) = 120596
2
0lArrrArr 119901
2= 1205962
0 (29)
From (29) the solution results are as follows
119901 = 1205960 forall119901 120596
0 120577 gt 0 (30)
Therefore the condition given in (27) is satisfied if andonly if 119901 = 120596
0
For the second condition in (28) the magnitude of open-loop transfer function in frequency120596
0is computed from (18)
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =
(2120577119901 + 1205960) sdot radic1205962
119911+ 1205962
0
1205960sdot radic1205962
119901+ 1205962
0
(31)
The frequencies 120596119911and 120596
119875are replaced with their
expressions from (17) resulting the following
1003816100381610038161003816119867 (1198951205960)1003816100381610038161003816 =radic1199012+ 1205962
0+ 4120577119901120596
0+ 412057721199012
1199012 + 1205962
0+ 4120577119901120596
0+ 41205772120596
2
0
(32)
Using (32) in (28) the same solution in (30) is obtained1199012= 1205962
0hArr 119901 = 120596
0 forall119901 120596
0 120577 gt 0
Using (30) in (15) it results the following
119901 = 1205960997904rArr 119911 =
1205960
2120577 + 1 (33)
The expression of CLTF becomes
1198670 (119904) =
1205962
0sdot (2120577 + 1) sdot (119904 + (1205960 (2120577 + 1)))
(1199042 + 21205771205960119904 + 1205962
0) sdot (119904 + 120596
0)
(34)
From (17) the zero and pole frequencies of OLTF are
120596119911=
1205960
2120577 + 1 120596
119901= 1205960sdot (2120577 + 1) (35)
The open-loop transfer function can be rewritten asfollows
119867(119904) =1205962
0(2120577 + 1) sdot (119904 + (12059602120577 + 1))
1199042 sdot [119904 + 1205960 (2120577 + 1)]
(36)
The real values of pole-zero pair and complex conjugatepoles of the CLTF given in (34) are illustrated in Figure 3
The position of the zero 119904 = minus119911 depends on 120577 parameterThree situations are possible
(i) if 120577 isin (0 12) then minus1205960lt minus119911 lt minus120577120596
0and the zero is
placed between the two points 119904 = minus1205960and 119904 = minus120577120596
0
respectively(ii) if 120577 = 12 then minus119911 = minus120577120596
0This is the particular case
of the Kesslerrsquos symmetrical optimummethod [6](iii) if 120577 gt 12 then 0 gt minus119911 gt minus120577120596
0and the zero is placed
to the right of the point 119904 = minus1205771205960 This is the case
illustrated in Figure 3
Knowing the pole value of CLTF 119901 = 1205960 the simplified
parameters of PID controller result from (22a) (22b) (22c)and (22d)
119896119862=1205960
119896119875
(37a)
119879119862=2120577 + 1
1205960
(37b)
1198791015840
119862= 119879119875 (37c)
119879 =1
(2120577 + 1) sdot 1205960
(37d)
In this case the system of inequalities from (25a) and(25b) is simpler including only 2 variables from referencemodel (120596
0and 120577)
(2120577 + 1) sdot 1205960 gt1
119879119875
(38a)
2120577 + 1
1205960
gt 119879119875 (38b)
6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
minus1205771205960
1205960
s = p1
s = p2
s = minus1205960
2120577p + 1
s = minus1205960
1205960radic1 minus 1205772
Im
Re
Figure 3 Poles and zero of CLTF for 119901 = 1205960
Proposition 4 In the case of symmetrical characteristics of theOLTF given in (36) around the natural frequency 120596
0 the phase
margin and the distance between the frequency points on the10-base logarithmic scale depend only on the parameter 120577
Proof The distance between the frequency points on thelogarithmic scale can be easily obtained using (35) in (27)
1205960
120596119911
=
120596119901
1205960
= 2120577 + 1 (39)
Using the OLTF given in (36) the phase margin results asfollows
120593119898= 120587 + arg (119867 (119895120596
0)) = arctg (2120577 + 1) minus arctg( 1
2120577 + 1)
(40)
For particular case of the Kesslerrsquos symmetrical optimummethod (120577 = 05) the distance between frequency pointsis equal with an octave and the phase margin is 120593
119898=
3687 [deg]
5 Simulation Results
For simulations the heading control problem of a ship isconsidered using a PID autopilot
The ship yaw angle (120595) is the model output and ruddercommand (120575) generated by autopilot is the control inputTheshipmodel is linearwith parametric uncertainties dependingon ship loading conditions and forward speed of the shipwhile the wave characteristics change frequently
It is a first order Nomoto model of the form given in (4)being identified for a ship speed of 22 knots [21]
119867119875 (119904) =
120595 (119904)
120575 (119904)=
119896119875
119904 sdot (119904119879119875+ 1)
(41)
where 120595(119904) and 120575(119904) represent the Laplace transforms of yawangle and rudder angle respectively
The ship model parameters are as follows
119896119875= minus 00834 [sminus1] 119879
119875= 598 [s] (42)
0 20 40 60 80 1000
02
04
06
08
1
12
14
Time (s)
Yaw
angl
e (de
g)
Figure 4 Step response of the closed-loop system
The autopilot model is given in (5) and the desired CLTFis given in (10) The parameters 120596
0and 120577 are chosen from
performance conditions [20]
120577 = 09 1205960= 01 [rads] (43)
Using the values from (42) and (43) it can be easilyverified that the conditions in (38a) and (38b) are satisfied
From the desired closed-loop transfer function withpole-zero pair specified in (30) and (33) and imposingsymmetrical characteristics of the OLTF the expressions in(34) and (36) are obtained From (37a) (37b) (37c) and(37d) the autopilot parameters are obtained
119896119862= minus 12 119879
119862= 28 [s]
1198791015840
119862= 598 [s] 119879
1= 357 [s]
(44)
The step response of the closed-loop transfer function isillustrated in Figure 4The step reference input is representedwith dotted line
Considering the second order reference model given in(8) the resulting autopilot is of real-PD type The response isover-dumped being represented with dashed line For PIDautopilot based on reference model with lead-lag compen-sator given in (10) the response is overshot and it is drawnwith continuous line
Similarly the ramp response of the CLTF is illustrated inFigure 5The ramp reference input is represented with dottedline Considering the second order reference model given in(8) with real-PD type the response is shownwith dashed lineAn important stationary error can be observed For referencemodel with lead-lag compensator given in (10) with PIDautopilot the response is represented with continuous lineIn this case a null stationary error is obtained
PID autopilot assures null stationary error for both stepand ramp variations on reference inputs
For referencemodelwith compensator andPID autopilotthe symmetrical characteristics of the open-loop transfer
Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
0 20 40 60 80 1000
02
04
06
07
08
01
03
05
09
1
Time (s)
Yaw
angl
e (de
g)
Figure 5 Ramp response of the closed-loop system
0
20
40
Mag
nitu
de (d
B)
120596z 1205960
120596p
10minus2 10010minus1
minus20
minus40
120596 (rads)
(a)
Phas
e (de
g)
10minus2 10010minus1
minus120
minus130
minus140
minus150
minus160
minus170
120596 (rads)
(b)
Figure 6 Symmetrical characteristics of OLTF
function are illustrated in Figure 6 It can be observed thatthe two conditions for magnitude-frequency characteristic ofOLTF generate the symmetry of phase-frequency character-istic In this case the phase margin is 120593
119898= 5069 [deg]
6 Conclusions
By combining the pole placement technique with symmet-rical optimum criterion the analytical expressions of PIDparameters are simplified In addition it was demonstratedthat there is only one possible pair for the pole-zero valuesof closed-loop transfer function so that the PID controllersatisfied two simultaneous conditions the desired behaviorof closed-loop system and symmetrical characteristics of theopen-loop transfer function For simulations PID autopilot
design for heading control problems of a conventional shipis considered PID autopilot assures null stationary error forboth step and ramp variations on reference inputs
References
[1] G J Suva A Datta and S P Bhattacharyya ldquoNew results on thesynthesis of PID controllersrdquo IEEE Transactions on AutomaticControl vol 47 no 2 pp 241ndash252 2002
[2] J I Yuz and M E Salgado ldquoFrom classical to state-feedback-based controllersrdquo IEEE Control Systems Magazine vol 23 no4 pp 58ndash67 2003
[3] S Sujitjorn and W Wiboonjaroen ldquoState-PID feedback forpole placement of LTI systemsrdquo Mathematical Problems inEngineering vol 2011 Article ID 929430 20 pages 2011
[4] G Herjolfsson and A Soffıa Hauksdottir ldquoDirect computationof optimal PID controllersrdquo in Proceedings of the 42nd IEEEConference on Decision and Control pp 1120ndash1125 December2003
[5] K J Astrom and T Hagglund PID Controllers Theory Designand Tuning Instrument Society of America Research TrianglePark NC USA 1995
[6] C Kessler ldquoDas symmetrische optimumrdquoRegelungstechnik vol6 pp 395ndash400 and 432ndash436 1958
[7] K J Astrom and T Hagglund ldquoAutomatic tuning of simpleregulators with specifications on phase and amplitudemarginsrdquoAutomattca vol 20 no 5 pp 645ndash651 1984
[8] Y Tang and R Ortega ldquoAdaptive tuning to frequency responsespecificationsrdquo Automatica vol 29 no 6 pp 1557ndash1563 1993
[9] M N Ab Malek and M S Mohamed Ali ldquoEvolutionary tuningmethod for PID controller parameters of a cruise control systemusing metamodelingrdquoModelling and Simulation in Engineeringvol 2009 Article ID 234529 8 pages 2009
[10] L Wang X Fang S Duan and X Liao ldquoPID controller basedon memristive CMAC networkrdquo Abstract and Applied Analysisvol 2013 Article ID 510238 6 pages 2013
[11] A Datta M T Ho and S P Bhattacharyya Structure andSynthesis of PID Controllers Springer New York NY USA2000
[12] Q-G Wang Z Zhang K J Astrom and L S Chek ldquoGuaran-teed dominant pole placement with PID controllersrdquo Journal ofProcess Control vol 19 no 2 pp 349ndash352 2009
[13] M Valasek and N Olgac ldquoEfficient pole placement techniquefor linear time-variant SISO systemsrdquo IEE Proceedings ControlTheory and Applications vol 142 no 5 pp 451ndash458 1995
[14] M de la Sen ldquoON pole-placement controllers for linear time-delay systems with commensurate point delaysrdquo MathematicalProblems in Engineering vol 2005 no 1 pp 123ndash140 2005
[15] J G Ziegler andN BNichols ldquoOptimum settings for automaticcontrollersrdquo Transactions of the ASME vol 64 pp 759ndash7681942
[16] K G Papadopoulos K Mermikli and N I Margaris ldquoOptimaltuning of PID controllers for integrating processes via thesymmetrical optimum criterionrdquo in Proceedings of the 19thMediterranean Conference on Control and Automation (MEDrsquo11) pp 1289ndash1294 grc June 2011
[17] L Loron ldquoTuning of PID controllers by the non-symmetricaloptimum methodrdquo Automatica vol 33 no 1 pp 103ndash107 1997
[18] S Preitl and R-E Precup ldquoExtension of tuning relations aftersymmetrical optimum method for PI and PID controllersrdquoAutomatica vol 35 no 10 pp 1731ndash1736 1999
8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
[19] V NicolauContributions in advanced automatic control of navalsystems [PhD thesis] University of Galati Galati Romania2004 (Romanian)
[20] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[21] K Nomoto ldquoResponse analysis of manoeuvrability and itsapplication to ship designrdquo Journal of the Society of NavalArchitects of Japan vol 11 1966
[22] E Ceanga C Nichita L Protin and N A CutululisTheorie dela Commande des Systemes Tehnica Bucharest Romania 2001
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of