Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 973903 9 pageshttpdxdoiorg1011552013973903
Research ArticleNonlinear State Space Modeling and System Identification forElectrohydraulic Control
Jun Yan Bo Li Hai-Feng Ling Hai-Song Chen and Mei-Jun Zhang
College of Field Engineering PLA University of Science and Technology Nanjing 210007 China
Correspondence should be addressed to Hai-Feng Ling hflingymailcom
Received 6 January 2013 Accepted 29 January 2013
Academic Editor Shengyong Chen
Copyright copy 2013 Jun Yan et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The paper deals with nonlinear modeling and identification of an electrohydraulic control system for improving its trackingperformanceWe build the nonlinear state spacemodel for analyzing the highly nonlinear system and then develop aHammerstein-Wiener (H-W) model which consists of a static input nonlinear block with two-segment polynomial nonlinearities a linear time-invariant dynamic block and a static output nonlinear block with single polynomial nonlinearity to describe it We simplify theH-Wmodel into a linear-in-parameters structure by using the key term separation principle and then use amodified recursive leastsquaremethod with iterative estimation of internal variables to identify all the unknown parameters simultaneously It is found thatthe proposedH-Wmodel approximates the actual systembetter than the independentHammersteinWiener andARXmodelsTheprediction error of the H-Wmodel is about 13 54 and 58 less than the Hammerstein Wiener and ARXmodels respectively
1 Introduction
Electrohydraulic control systems are widely used in industrydue to their unique features of small size to power ratio highnature frequency high position stiffness and low positionerror [1] However the dynamics of hydraulic systems ishighly nonlinear in nature The systems may be subjectedto nonsmooth nonlinearities due to control input saturationfriction valve overlapping and directional changes of valveopening A number of robust and adaptive control strategieshave been proposed to deal with such problems [2ndash4] butmodeling and identification of control systems remain animportant and difficult issue in most real-world applications
Linear models of electrohydraulic control systems aresimple and widely used but they assume that the hydraulicactuator always moves around an operating point [5 6]which does not accord with most real-world cases where theactuator moves in a wide range with hard nonlinearities Inthe literatureWang et al [7] analyzed the nonlinear dynamiccharacteristics of hydraulic cylinder such as nonlinear gainnonlinear spring and nonlinear friction force Jelali andSchwarz [8] identified the nonlinear models in observercanonical form of hydraulic servodrives Kleinsteuber andSepehri [9] used a polynomial abductive network modeling
technique to describe a class of hydraulic actuation systemswhich were used in heavy-duty mobile machines Yousefiet al [10] proposed the Differential Evolution algorithm toidentify the nonlinear model of a servohydraulic system withflexible load Yao et al [2] also pointed out that there weremany considerable model uncertainties such as parametricuncertainties and uncertain nonlinearities As we can seemodeling and identifying the electrohydraulic control systemas a flexible nonlinear black-box or grey-box are moreappropriate for real-world applications
In the field of nonlinear system identification the Ham-merstein and Wiener (H-W) models are widely used [11]Kwak et al [12] proposed two Hammerstein-type mod-els to identify hydraulic actuator friction dynamics TheHammerstein-type models are built by linear time-invariant(LTI) dynamic subsystems and static nonlinear (SN) elementsin a cascade structure they are able to approximate most ofthe nonlinear dynamics with an arbitrarily high accuracy andcan generate both physical insights and flexible structuresGenerally the Wiener model is supposed to represent theoutput nonlinearities and sensor nonlinearities while theHammerstein model is supposed to represent the input non-linearities and actuator nonlinearities The Hammerstein-Wiener (H-W) model which is defined as a static nonlinear
2 Mathematical Problems in Engineering
119865119891
119861119901
119865119904
119872ℎ
11987511198601 11987521198602
1198761 1198762 119909119907
From proportionalrelief valve
119875119904 119875119903
119865119897
Figure 1 Valve controlled asymmetric cylinder system
element in cascade with a linear dynamic system followed byanother static nonlinear element is adopted in this paper
The H-W model is a parameterized nonlinear model inblack-box termThere are two advantages of the H-WmodelThe first one is that only the input and output singles areused for identification of all the unknown parameters thatis no information on the internal states is needed which cansimplify the identification process and improve the predictionaccuracy by less sensors and noise The second one is thatit has a physical insight into the nonlinear characteristics ofthe actual system which is important in system analyzingmonitoring diagnosis and controller design
The rest of this paper is organized as follows Section 2presents the theoretic modeling of an electrohydraulic con-trol system Section 3 describes our H-W model in detailSection 4 proposes the iterative identification algorithm forthe H-W model Section 5 presents the experimental tests aswell as the identification results Finally Section 6 concludesthe paper
2 Theoretic Modeling
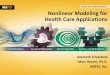
A general electrohydraulic control system is mainly com-prised of an electrohydraulic proportional valve and a valvecontrolled asymmetric cylinder In this paper we study aproportional relief valve controlled valve-cylinder system asshown in Figure 1 where ℎ is the displacement of piston119872 is the equivalent load mass 119860
1and 119860
2are the areas of
piston in the head and rod sides of cylinder 1198751and 1198752are the
pressures inside the two chambers of the cylinder 119875119904is the
supply pressure 119875119903is the pressure of return oil 119876
1and 119876
2
are the flows in and out of the cylinder 119909V is displacementof the spool valve 119861
119901is the viscous damping coefficient 119865
119891
represents nonlinear friction 119865119904represents nonlinear spring
40
30
20
10
002 04 06 08 1 12
119868119889
Pres
sure
(119901b
ar)
0Current (119868A)
(a) Dead band of the pilot relief valve
250
200
150
100
50
0minus8 minus6 minus4 minus2 0 2 4 6 8
Area ofbypassed way
NegativePositive
119888
Orifi
ce ar
ea (119860
mm
2)
Spool displacement (119909120584mm)
(b) Dead band of the main valve
Figure 2 Dead band of the electrohydraulic proportional system
force 119865119888represents viscous force and 119865
119897represents uncertain
loadModeling the system by physical laws gives us a particular
insight into the systemrsquos properties which allows us toseek the parameterized models that are flexible enough tocapture all dynamic behavior of the system [13 14] Theelectrohydraulic proportional valve is controlled directly bythe digital controller It can bemodeled as a first order transferfunction [9]
119866119897=119909V (119904)
119868V (119904)=
119896V
1 + 120591V119904 (1)
where 119896V is the gain of the electrohydraulic proportionalvalve 120591V is the time constant of the first order system119868V = 119868 minus 119868
119889is the effective current 119868 and 119868
119889are the practical
input current of the proportional relief valve and the currentto overcome dead band of the valve respectively The deadbands mainly due to the pilot relief valve and the main valveare depicted in Figure 2
The valve controlled asymmetric cylinder is shown inFigure 1 Generally its model is constructed by combiningthe flow equation of spool valve the continuity equation
Mathematical Problems in Engineering 3
of hydraulic cylinder and the force equilibrium equation ofhydraulic cylinder [2] Define the state variables as
[1199091 1199092119909311990941199095]119879
≜ [ℎ ℎ 11990111199012119909V]119879
(2)
The entire system can be modeled as the followingnonlinear state space model [15]
1= 1199092
2=11986011199093
119872minus11986021199094
119872minus119865119891(1199092)
119872
minus119865119904(1199091)
119872minus119865119888(1199092)
119872minus119865119897
119872
3= minus
12057311989011986011199092
1198811
minus120573119890(119862119894+ 119862119890) 1199093
1198811
+1205731198901198621198941199094
1198811
+1205731198901198921(119909)
1198811
1199095
4=12057311989011986021199092
1198812
+1205731198901198621198941199093
1198812
minus120573119890(119862119894+ 119862119890) 1199094
1198812
minus1205731198901198922(119909)
1198812
1199095
5=119896V
120591V
119868V minus1199095
120591V
(3)
1198921(119909) = sgn((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
times 1198621198891119882radic
2
120588((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
1198922(119909) = sgn((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
times 1198621198892119882radic
2
120588((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
(4)
where 120573119890is the effective bulk modulus119881
1and119881
2are effective
volumes of the two chambers 119862119894and 119862
119890are internal and
external leakage coefficients 119882 is the area gradient of thevalve orifice and 119862
1198891and 119862
1198892are flow discharge coefficients
of the spool valveSeveral physical phenomena have been taken into consid-
eration in the above model for example nonlinear friction119865119891 nonlinear spring force 119865
119904 viscous force 119865
119888 uncertain load
119865119897 discontinuous flow discharge 119892
119894 oil compliance internal
leakage and external leakage From the theoretic modelingof the electrohydraulic control system we can see that thesystem is a highly nonlinear system containing complexfeatures such as the dead band nonlinearity saturationsquared pressure drop and asymmetric response property
There are also some hard-to-model nonlinearities in(3) such as nonlinear friction nonlinear spring force anduncertain external disturbances So modeling this systemjust by physical laws fails to approximate the actual systemFurthermore identification of the unknown parameters in(3) is hard due to its demand on internal states measurementIn the followingwe adopt anH-Wmodel tomodel this highly
1198731(∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
120584(119896)
(a) Hammerstein model
1198732 (∙)119906(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(b) Wiener model
1198731(∙) 1198732 (∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(c) Hammerstein-Wiener model
Figure 3 Hammerstein and Wiener models
nonlinear dynamic system The H-W model is a flexibleblack-box model based on the physical insight into theactual system We identify the parameters of the H-Wmodelusing the input and output signals which can simplify theidentification process and improve the prediction accuracy byless sensors and noise
3 Hammerstein-Wiener Model
The ldquouniversalrdquo nonlinear black-box methods such as neuralnetworks Volterra series and fuzzy models are widely usedto model complex nonlinear systems Most of these meth-ods can avoid unmodeled dynamics in the aforementionedmathematical model [16 17] However these models do notprovide deep insight into the nonlinear characteristics ofthe actual system which is important in system analyzingmonitoring diagnosis and controller design In comparisonthe Hammerstein-Wiener (H-W) model possesses the flexi-bility to capture all relevant nonlinear phenomena as well asthe physical insight into the actual system In this sectionwe develop an H-W model to describe the electrohydrauliccontrol system
The H-W model is composed of an internal lineardynamic block and two static nonlinear blocks it is thecombination of Hammerstein and Wiener model The Ham-merstein model is a nonlinear model with a static nonlinearblock followed by a linear dynamic block as shown inFigure 3(a) and this N-L type of model may account foractuator nonlinearities and other input nonlinear effectsThe Wiener model has linear dynamic block followed bya nonlinear block as shown in Figure 3(b) and this L-Ntype of model mainly accounts for sensor nonlinearitiesand output nonlinear effects A series combination of aHammerstein and a Wiener model yields the H-W modelas shown in Figure 3(c) and this N-L-N type of model hasboth characteristics of the Hammerstein andWiener modelsMoreover all of the three models have proved to be able toaccurately describe a wide variety of nonlinear systems in [9]
According to the nonlinearities of the abovementionedelectrohydraulic control system for example dead band
4 Mathematical Problems in Engineering
saturation nonlinear friction nonlinear spring force andasymmetric dynamics of the cylinder we describe the inputnonlinearity (119873
1) block of the models in Figure 3 by a
two-segment polynomial nonlinearities The two-segmentpolynomial nonlinearities have the advantage of describinga system whose dynamic properties differ significantly at thepositive and negative directions [18] it has less parameters tobe estimated than a single polynomial and piecewise linearmodels [19] It can be written as
119908 (119896) =
119891 (119906 (119896)) =
1199031
sum119897=0
119891119897119906119897(119896) 119906 (119896) ge 0
119892 (119906 (119896)) =
1199031
sum119897=0
119892119897119906119897(119896) 119906 (119896) lt 0
(5)
where 119891119897and 119892
119897are parameters of the polynomial function
119906(119896) is the input 119908(119896) is the output of static nonlinearfunction119873
1 and 119903
1is the degree of the polynomial function
Define the switching function as
ℎ (119906) = 0 119906 ge 0
1 119906 lt 0(6)
Then the relation between inputs 119906(119896) and outputs119908(119896) of the input nonlinear block can be written as
119908 (119896) = 119891 (119906 (119896)) + (119892 (119906 (119896)) minus 119891 (119906 (119896))) ℎ (119906 (119896))
=
1199031
sum
119897=0
119891119897119906119897(119896) +
1199031
sum
119897=0
119901119897119906119897(119896) ℎ (119906 (119896))
(7)
where 119901119897= 119892119897minus 119891119897
The difference equationmodel 119871(119911) of the linear dynamicblock is described by an extended autoregressive (ARX)model as
119860(119911minus1) 119909 (119896) = 119911
minus119899119896119861 (119911minus1)119908 (119896) + V (119896) (8)
where 119908(119896) and 119909(119896) are the input and output of the lineardynamic block respectively V(119896) is white noise 119899
119896represents
the pure delay of the system and119860(119911minus1) and 119861(119911minus1) are scalarpolynomials in the unit delay operator 119911minus1
119860(119911minus1) = 1 + 119886
1119911minus1+ sdot sdot sdot + 119886
119899119886
119911minus119899119886
119861 (119911minus1) = 1198870+ 1198871119911minus1+ sdot sdot sdot + 119887
119899119887
119911minus119899119887
(9)
The output nonlinear block 1198732is described by a single
polynomials
119910 (119896) = 119902 (119909 (119896)) =
1199032
sum
119898=1
119902119898119909119898(119896) (10)
where 119902119898
is unknown parameter 1199032is the degree of the
polynomial function 1198732 and 119910(119896) is output of the entire
system and in this paper it represents the output velocityThe H-Wmodel of the system is depicted in Figure 4
ARX
1198731 1198732
119906(119896) 119908(119896) 119910(119896)
119871(119911)
119909(119896)
Figure 4 Schematic diagram of the H-Wmodel
4 Iterative Identification Algorithm
As we know the cascade mode of the models depicted inFigure 3 leads to composite mappings for example Ham-merstein model 119871(119873
1(119906(119896))) Wiener model 119873
2(119871(119906(119896)))
H-W model 1198732(119871(1198731(119906(119896)))) Substituting the mathematic
models of each block (ie (7) (8) and (10)) into the com-posite mappings directly leads to complex models which arestrongly nonlinear in both of the variables and the unknownparameters It is not appropriate for parameter estimation[20] In the following we apply the so-called key termseparation principle to simplify the H-Wmodel into a linear-in-parameters structure and then adopt a modified recursiveleast square algorithm with internal variable estimation toestimate both of the linear and nonlinear block parameterssimultaneously
41 Key Term Separation Principle Let 119891 119892 and ℎ be one-to-one mappings defined on nonempty sets 119880119883 and 119884 as
119891 119880 997888rarr 119883
119892 119883 997888rarr 119884
ℎ = 119892 ∘ 119891 119880 997888rarr 119884
(11)
Then the composite mapping ℎ can be given by
119910 (119905) = 119892 [119909 (119905)] = 119892 [119891 [119906 (119905)]] = ℎ [119906 (119905)] (12)
Thebasic idea of key term separation principle is a formofhalf-substitution suggested in [21] Suppose 119892 be an analyticnonlinear mapping which can be rewritten into the followingadditive form
119910 (119905) = 119909 (119905) + 119866 [119909 (119905)] (13)
Which consists of the key term 119909(119905) plus the remainder ofthe originalmapping assigned as119866(sdot) Rewrite the one-to-onemapping 119891
119909 (119905) = 119891 [119906 (119905)] (14)
We substitute (13) only into the first term in the right sideof (14) and then obtain the following mapping
119910 (119905) = 119891 [119906 (119905)] + 119866 [119909 (119905)] (15)
Equations (14) and (15) describe the mapping functionℎ in a compositional way This makes the inner mappingappears both explicitly and implicitly in the outer one whichmay be helpful for parameter identification Note that thisdecomposition technique can easily be extended to a moremultilayer composite mapping
Mathematical Problems in Engineering 5
42 Modified Least Square Algorithm In this section wedecompose the H-W model into a linear-in-parametersstructure by the key term separation principle and developa modified iterative least square algorithm with internalvariables estimation to identify all the unknown parametersof the H-W model We also apply this method to theHammerstein and Wiener models
According to the key term separation principle werewrite the output nonlinear block119873
2 that is (10) as
119910 (119896) = 1199021119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896) (16)
where the internal variable 119909(119896) is separated The dynamiclinear block 119871(119911) that is (8) can be rewritten as
119909 (119896) = 1198870119908 (119896) 119911
minus119899119896 + 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896)
(17)
where the internal variable 119908(119896) is separated Now to com-plete the sequential decomposition first we substitute (7)into (17) only for 119908(119896) in the first term and then substitutethe new equation (17) into (16) only for 119909(119896) in the first termagain The final output equation of the H-Wmodel will be
119910 (119896) = 11990211198870(119891 (119906 (119896)) + 119901 (119906 (119896)) ℎ (119906 (119896))) 119911
minus119899119896
+ 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896)
(18)
As the H-W model depicted in Figure 4 consists of threesubsystems in series the parameterization of the model isnot unique because many combinations of parameters can befound [22]Therefore one parameter in at least two blocks hasto be fixed in (18) Evidently the choices 119902
1= 1 and 119887
0= 1will
simplify the model descriptionThen the H-Wmodel can bewritten as
119910 (119896) =
1199031
sum
119897=0
119891119897119906119897(119896 minus 119899
119896) +
1199031
sum
119897=0
119901119897119906119897(119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
+
119899119887
sum
119894=1
119887119894119908 (119896 minus 119899
119896minus 119894) +
119899119886
sum
119895=1
119886119895119909 (119896 minus 119895) +
1199032
sum
119898=2
119902119898119909119898(119896)
(19)
Equation (19) is linear-in-parameters for given 119906(119896) 119909(119896)and 119908(119896) it can be written in the following least squareformat
119910 (119896) = Φ119879(119896 120579) 120579 (20)
where the internal variables 119908(119896) and 119909(119896) are estimated by(7) and (17) using the preceding estimated parameters duringeach iterative process and
Φ119879= [1 119906 (119896minus119899
119896) 119906
1199031 (119896minus119899
119896)
ℎ (119906 (119896minus119899119896)) 119906 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896))
1199061199031 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896)) 119908 (119896minus119899
119896minus1)
119908 (119896 minus 119899119896minus 119894) minus119909 (119896minus1) minus119909 (119896minus119895)
1199092(119896) 119909
1199032 (119896)]
120579 = [1198910 1198911 119891
1199031
1199010 1199011 119901
1199031
1198871 119887
119899119887
1198861 119886
119899119886
1199022 119902
1199032
] 119879
(21)
Nowwe apply themodified recursive least squaremethodwith iterative estimation of the internal variable to (20) [17]Minimizing the following least square criterion [12]
= arg min120579
119899
sum
119896=1
120582119899minus119896
[119910 (119896) minus Φ119879
(119896) 120579]
2
(22)
where 120582 ≦ 1 is the forgetting factor the formulas ofthe recursive identification algorithm supplemented withinternal variable estimation are as follows
(119896) = (119896 minus 1) +
P (119896 minus 1) Φ (119896) [119910 (119896) minus Φ119879
(119896) (119896 minus 1)]
120582 + Φ119879
(119896)P (119896 minus 1) Φ (119896)
(23)
P (119896) = P (119896 minus 1)
120582minusP (119896 minus 1) Φ (119896) Φ
119879
(119896)P (119896 minus 1)
1 + Φ119879
(119896)P (119896 minus 1) Φ (119896) 120582
(24)
(119896) =
1199031
sum
119897=0
119891119897(119896 minus 1) 119906
119897(119896) +
1199031
sum
119897=0
119897(119896 minus 1) 119906
119897(119896) ℎ (119906 (119896))
(25)
(119896) = (119896 minus 119899119896) +
119899119887
sum
119894=1
119894(119896 minus 1) (119896 minus 119899
119896minus 119894)
minus
119899119886
sum
119895=1
119895(119896 minus 1) 119909 (119896 minus 119895)
(26)
Φ (119896) = [1 119906 (119896 minus 119899119896) 119906
1199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
119906 (119896 minus 119899119896) ℎ (119906 (119896 minus 119899
119896))
1199061199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
(119896 minus 119899119896minus 1) (119896 minus 119899
119896minus 119894)
minus (119896 minus 1) minus (119896 minus 119895) 2(119896)
1199032 (119896)]119879
(27)
where P(0) = 120583I I is unit matrix and 0 lt 120583 lt infin
6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
119865119891
119861119901
119865119904
119872ℎ
11987511198601 11987521198602
1198761 1198762 119909119907
From proportionalrelief valve
119875119904 119875119903
119865119897
Figure 1 Valve controlled asymmetric cylinder system
element in cascade with a linear dynamic system followed byanother static nonlinear element is adopted in this paper
The H-W model is a parameterized nonlinear model inblack-box termThere are two advantages of the H-WmodelThe first one is that only the input and output singles areused for identification of all the unknown parameters thatis no information on the internal states is needed which cansimplify the identification process and improve the predictionaccuracy by less sensors and noise The second one is thatit has a physical insight into the nonlinear characteristics ofthe actual system which is important in system analyzingmonitoring diagnosis and controller design
The rest of this paper is organized as follows Section 2presents the theoretic modeling of an electrohydraulic con-trol system Section 3 describes our H-W model in detailSection 4 proposes the iterative identification algorithm forthe H-W model Section 5 presents the experimental tests aswell as the identification results Finally Section 6 concludesthe paper
2 Theoretic Modeling
A general electrohydraulic control system is mainly com-prised of an electrohydraulic proportional valve and a valvecontrolled asymmetric cylinder In this paper we study aproportional relief valve controlled valve-cylinder system asshown in Figure 1 where ℎ is the displacement of piston119872 is the equivalent load mass 119860
1and 119860
2are the areas of
piston in the head and rod sides of cylinder 1198751and 1198752are the
pressures inside the two chambers of the cylinder 119875119904is the
supply pressure 119875119903is the pressure of return oil 119876
1and 119876
2
are the flows in and out of the cylinder 119909V is displacementof the spool valve 119861
119901is the viscous damping coefficient 119865
119891
represents nonlinear friction 119865119904represents nonlinear spring
40
30
20
10
002 04 06 08 1 12
119868119889
Pres
sure
(119901b
ar)
0Current (119868A)
(a) Dead band of the pilot relief valve
250
200
150
100
50
0minus8 minus6 minus4 minus2 0 2 4 6 8
Area ofbypassed way
NegativePositive
119888
Orifi
ce ar
ea (119860
mm
2)
Spool displacement (119909120584mm)
(b) Dead band of the main valve
Figure 2 Dead band of the electrohydraulic proportional system
force 119865119888represents viscous force and 119865
119897represents uncertain
loadModeling the system by physical laws gives us a particular
insight into the systemrsquos properties which allows us toseek the parameterized models that are flexible enough tocapture all dynamic behavior of the system [13 14] Theelectrohydraulic proportional valve is controlled directly bythe digital controller It can bemodeled as a first order transferfunction [9]
119866119897=119909V (119904)
119868V (119904)=
119896V
1 + 120591V119904 (1)
where 119896V is the gain of the electrohydraulic proportionalvalve 120591V is the time constant of the first order system119868V = 119868 minus 119868
119889is the effective current 119868 and 119868
119889are the practical
input current of the proportional relief valve and the currentto overcome dead band of the valve respectively The deadbands mainly due to the pilot relief valve and the main valveare depicted in Figure 2
The valve controlled asymmetric cylinder is shown inFigure 1 Generally its model is constructed by combiningthe flow equation of spool valve the continuity equation
Mathematical Problems in Engineering 3
of hydraulic cylinder and the force equilibrium equation ofhydraulic cylinder [2] Define the state variables as
[1199091 1199092119909311990941199095]119879
≜ [ℎ ℎ 11990111199012119909V]119879
(2)
The entire system can be modeled as the followingnonlinear state space model [15]
1= 1199092
2=11986011199093
119872minus11986021199094
119872minus119865119891(1199092)
119872
minus119865119904(1199091)
119872minus119865119888(1199092)
119872minus119865119897
119872
3= minus
12057311989011986011199092
1198811
minus120573119890(119862119894+ 119862119890) 1199093
1198811
+1205731198901198621198941199094
1198811
+1205731198901198921(119909)
1198811
1199095
4=12057311989011986021199092
1198812
+1205731198901198621198941199093
1198812
minus120573119890(119862119894+ 119862119890) 1199094
1198812
minus1205731198901198922(119909)
1198812
1199095
5=119896V
120591V
119868V minus1199095
120591V
(3)
1198921(119909) = sgn((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
times 1198621198891119882radic
2
120588((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
1198922(119909) = sgn((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
times 1198621198892119882radic
2
120588((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
(4)
where 120573119890is the effective bulk modulus119881
1and119881
2are effective
volumes of the two chambers 119862119894and 119862
119890are internal and
external leakage coefficients 119882 is the area gradient of thevalve orifice and 119862
1198891and 119862
1198892are flow discharge coefficients
of the spool valveSeveral physical phenomena have been taken into consid-
eration in the above model for example nonlinear friction119865119891 nonlinear spring force 119865
119904 viscous force 119865
119888 uncertain load
119865119897 discontinuous flow discharge 119892
119894 oil compliance internal
leakage and external leakage From the theoretic modelingof the electrohydraulic control system we can see that thesystem is a highly nonlinear system containing complexfeatures such as the dead band nonlinearity saturationsquared pressure drop and asymmetric response property
There are also some hard-to-model nonlinearities in(3) such as nonlinear friction nonlinear spring force anduncertain external disturbances So modeling this systemjust by physical laws fails to approximate the actual systemFurthermore identification of the unknown parameters in(3) is hard due to its demand on internal states measurementIn the followingwe adopt anH-Wmodel tomodel this highly
1198731(∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
120584(119896)
(a) Hammerstein model
1198732 (∙)119906(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(b) Wiener model
1198731(∙) 1198732 (∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(c) Hammerstein-Wiener model
Figure 3 Hammerstein and Wiener models
nonlinear dynamic system The H-W model is a flexibleblack-box model based on the physical insight into theactual system We identify the parameters of the H-Wmodelusing the input and output signals which can simplify theidentification process and improve the prediction accuracy byless sensors and noise
3 Hammerstein-Wiener Model
The ldquouniversalrdquo nonlinear black-box methods such as neuralnetworks Volterra series and fuzzy models are widely usedto model complex nonlinear systems Most of these meth-ods can avoid unmodeled dynamics in the aforementionedmathematical model [16 17] However these models do notprovide deep insight into the nonlinear characteristics ofthe actual system which is important in system analyzingmonitoring diagnosis and controller design In comparisonthe Hammerstein-Wiener (H-W) model possesses the flexi-bility to capture all relevant nonlinear phenomena as well asthe physical insight into the actual system In this sectionwe develop an H-W model to describe the electrohydrauliccontrol system
The H-W model is composed of an internal lineardynamic block and two static nonlinear blocks it is thecombination of Hammerstein and Wiener model The Ham-merstein model is a nonlinear model with a static nonlinearblock followed by a linear dynamic block as shown inFigure 3(a) and this N-L type of model may account foractuator nonlinearities and other input nonlinear effectsThe Wiener model has linear dynamic block followed bya nonlinear block as shown in Figure 3(b) and this L-Ntype of model mainly accounts for sensor nonlinearitiesand output nonlinear effects A series combination of aHammerstein and a Wiener model yields the H-W modelas shown in Figure 3(c) and this N-L-N type of model hasboth characteristics of the Hammerstein andWiener modelsMoreover all of the three models have proved to be able toaccurately describe a wide variety of nonlinear systems in [9]
According to the nonlinearities of the abovementionedelectrohydraulic control system for example dead band
4 Mathematical Problems in Engineering
saturation nonlinear friction nonlinear spring force andasymmetric dynamics of the cylinder we describe the inputnonlinearity (119873
1) block of the models in Figure 3 by a
two-segment polynomial nonlinearities The two-segmentpolynomial nonlinearities have the advantage of describinga system whose dynamic properties differ significantly at thepositive and negative directions [18] it has less parameters tobe estimated than a single polynomial and piecewise linearmodels [19] It can be written as
119908 (119896) =
119891 (119906 (119896)) =
1199031
sum119897=0
119891119897119906119897(119896) 119906 (119896) ge 0
119892 (119906 (119896)) =
1199031
sum119897=0
119892119897119906119897(119896) 119906 (119896) lt 0
(5)
where 119891119897and 119892
119897are parameters of the polynomial function
119906(119896) is the input 119908(119896) is the output of static nonlinearfunction119873
1 and 119903
1is the degree of the polynomial function
Define the switching function as
ℎ (119906) = 0 119906 ge 0
1 119906 lt 0(6)
Then the relation between inputs 119906(119896) and outputs119908(119896) of the input nonlinear block can be written as
119908 (119896) = 119891 (119906 (119896)) + (119892 (119906 (119896)) minus 119891 (119906 (119896))) ℎ (119906 (119896))
=
1199031
sum
119897=0
119891119897119906119897(119896) +
1199031
sum
119897=0
119901119897119906119897(119896) ℎ (119906 (119896))
(7)
where 119901119897= 119892119897minus 119891119897
The difference equationmodel 119871(119911) of the linear dynamicblock is described by an extended autoregressive (ARX)model as
119860(119911minus1) 119909 (119896) = 119911
minus119899119896119861 (119911minus1)119908 (119896) + V (119896) (8)
where 119908(119896) and 119909(119896) are the input and output of the lineardynamic block respectively V(119896) is white noise 119899
119896represents
the pure delay of the system and119860(119911minus1) and 119861(119911minus1) are scalarpolynomials in the unit delay operator 119911minus1
119860(119911minus1) = 1 + 119886
1119911minus1+ sdot sdot sdot + 119886
119899119886
119911minus119899119886
119861 (119911minus1) = 1198870+ 1198871119911minus1+ sdot sdot sdot + 119887
119899119887
119911minus119899119887
(9)
The output nonlinear block 1198732is described by a single
polynomials
119910 (119896) = 119902 (119909 (119896)) =
1199032
sum
119898=1
119902119898119909119898(119896) (10)
where 119902119898
is unknown parameter 1199032is the degree of the
polynomial function 1198732 and 119910(119896) is output of the entire
system and in this paper it represents the output velocityThe H-Wmodel of the system is depicted in Figure 4
ARX
1198731 1198732
119906(119896) 119908(119896) 119910(119896)
119871(119911)
119909(119896)
Figure 4 Schematic diagram of the H-Wmodel
4 Iterative Identification Algorithm
As we know the cascade mode of the models depicted inFigure 3 leads to composite mappings for example Ham-merstein model 119871(119873
1(119906(119896))) Wiener model 119873
2(119871(119906(119896)))
H-W model 1198732(119871(1198731(119906(119896)))) Substituting the mathematic
models of each block (ie (7) (8) and (10)) into the com-posite mappings directly leads to complex models which arestrongly nonlinear in both of the variables and the unknownparameters It is not appropriate for parameter estimation[20] In the following we apply the so-called key termseparation principle to simplify the H-Wmodel into a linear-in-parameters structure and then adopt a modified recursiveleast square algorithm with internal variable estimation toestimate both of the linear and nonlinear block parameterssimultaneously
41 Key Term Separation Principle Let 119891 119892 and ℎ be one-to-one mappings defined on nonempty sets 119880119883 and 119884 as
119891 119880 997888rarr 119883
119892 119883 997888rarr 119884
ℎ = 119892 ∘ 119891 119880 997888rarr 119884
(11)
Then the composite mapping ℎ can be given by
119910 (119905) = 119892 [119909 (119905)] = 119892 [119891 [119906 (119905)]] = ℎ [119906 (119905)] (12)
Thebasic idea of key term separation principle is a formofhalf-substitution suggested in [21] Suppose 119892 be an analyticnonlinear mapping which can be rewritten into the followingadditive form
119910 (119905) = 119909 (119905) + 119866 [119909 (119905)] (13)
Which consists of the key term 119909(119905) plus the remainder ofthe originalmapping assigned as119866(sdot) Rewrite the one-to-onemapping 119891
119909 (119905) = 119891 [119906 (119905)] (14)
We substitute (13) only into the first term in the right sideof (14) and then obtain the following mapping
119910 (119905) = 119891 [119906 (119905)] + 119866 [119909 (119905)] (15)
Equations (14) and (15) describe the mapping functionℎ in a compositional way This makes the inner mappingappears both explicitly and implicitly in the outer one whichmay be helpful for parameter identification Note that thisdecomposition technique can easily be extended to a moremultilayer composite mapping
Mathematical Problems in Engineering 5
42 Modified Least Square Algorithm In this section wedecompose the H-W model into a linear-in-parametersstructure by the key term separation principle and developa modified iterative least square algorithm with internalvariables estimation to identify all the unknown parametersof the H-W model We also apply this method to theHammerstein and Wiener models
According to the key term separation principle werewrite the output nonlinear block119873
2 that is (10) as
119910 (119896) = 1199021119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896) (16)
where the internal variable 119909(119896) is separated The dynamiclinear block 119871(119911) that is (8) can be rewritten as
119909 (119896) = 1198870119908 (119896) 119911
minus119899119896 + 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896)
(17)
where the internal variable 119908(119896) is separated Now to com-plete the sequential decomposition first we substitute (7)into (17) only for 119908(119896) in the first term and then substitutethe new equation (17) into (16) only for 119909(119896) in the first termagain The final output equation of the H-Wmodel will be
119910 (119896) = 11990211198870(119891 (119906 (119896)) + 119901 (119906 (119896)) ℎ (119906 (119896))) 119911
minus119899119896
+ 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896)
(18)
As the H-W model depicted in Figure 4 consists of threesubsystems in series the parameterization of the model isnot unique because many combinations of parameters can befound [22]Therefore one parameter in at least two blocks hasto be fixed in (18) Evidently the choices 119902
1= 1 and 119887
0= 1will
simplify the model descriptionThen the H-Wmodel can bewritten as
119910 (119896) =
1199031
sum
119897=0
119891119897119906119897(119896 minus 119899
119896) +
1199031
sum
119897=0
119901119897119906119897(119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
+
119899119887
sum
119894=1
119887119894119908 (119896 minus 119899
119896minus 119894) +
119899119886
sum
119895=1
119886119895119909 (119896 minus 119895) +
1199032
sum
119898=2
119902119898119909119898(119896)
(19)
Equation (19) is linear-in-parameters for given 119906(119896) 119909(119896)and 119908(119896) it can be written in the following least squareformat
119910 (119896) = Φ119879(119896 120579) 120579 (20)
where the internal variables 119908(119896) and 119909(119896) are estimated by(7) and (17) using the preceding estimated parameters duringeach iterative process and
Φ119879= [1 119906 (119896minus119899
119896) 119906
1199031 (119896minus119899
119896)
ℎ (119906 (119896minus119899119896)) 119906 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896))
1199061199031 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896)) 119908 (119896minus119899
119896minus1)
119908 (119896 minus 119899119896minus 119894) minus119909 (119896minus1) minus119909 (119896minus119895)
1199092(119896) 119909
1199032 (119896)]
120579 = [1198910 1198911 119891
1199031
1199010 1199011 119901
1199031
1198871 119887
119899119887
1198861 119886
119899119886
1199022 119902
1199032
] 119879
(21)
Nowwe apply themodified recursive least squaremethodwith iterative estimation of the internal variable to (20) [17]Minimizing the following least square criterion [12]
= arg min120579
119899
sum
119896=1
120582119899minus119896
[119910 (119896) minus Φ119879
(119896) 120579]
2
(22)
where 120582 ≦ 1 is the forgetting factor the formulas ofthe recursive identification algorithm supplemented withinternal variable estimation are as follows
(119896) = (119896 minus 1) +
P (119896 minus 1) Φ (119896) [119910 (119896) minus Φ119879
(119896) (119896 minus 1)]
120582 + Φ119879
(119896)P (119896 minus 1) Φ (119896)
(23)
P (119896) = P (119896 minus 1)
120582minusP (119896 minus 1) Φ (119896) Φ
119879
(119896)P (119896 minus 1)
1 + Φ119879
(119896)P (119896 minus 1) Φ (119896) 120582
(24)
(119896) =
1199031
sum
119897=0
119891119897(119896 minus 1) 119906
119897(119896) +
1199031
sum
119897=0
119897(119896 minus 1) 119906
119897(119896) ℎ (119906 (119896))
(25)
(119896) = (119896 minus 119899119896) +
119899119887
sum
119894=1
119894(119896 minus 1) (119896 minus 119899
119896minus 119894)
minus
119899119886
sum
119895=1
119895(119896 minus 1) 119909 (119896 minus 119895)
(26)
Φ (119896) = [1 119906 (119896 minus 119899119896) 119906
1199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
119906 (119896 minus 119899119896) ℎ (119906 (119896 minus 119899
119896))
1199061199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
(119896 minus 119899119896minus 1) (119896 minus 119899
119896minus 119894)
minus (119896 minus 1) minus (119896 minus 119895) 2(119896)
1199032 (119896)]119879
(27)
where P(0) = 120583I I is unit matrix and 0 lt 120583 lt infin
6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
of hydraulic cylinder and the force equilibrium equation ofhydraulic cylinder [2] Define the state variables as
[1199091 1199092119909311990941199095]119879
≜ [ℎ ℎ 11990111199012119909V]119879
(2)
The entire system can be modeled as the followingnonlinear state space model [15]
1= 1199092
2=11986011199093
119872minus11986021199094
119872minus119865119891(1199092)
119872
minus119865119904(1199091)
119872minus119865119888(1199092)
119872minus119865119897
119872
3= minus
12057311989011986011199092
1198811
minus120573119890(119862119894+ 119862119890) 1199093
1198811
+1205731198901198621198941199094
1198811
+1205731198901198921(119909)
1198811
1199095
4=12057311989011986021199092
1198812
+1205731198901198621198941199093
1198812
minus120573119890(119862119894+ 119862119890) 1199094
1198812
minus1205731198901198922(119909)
1198812
1199095
5=119896V
120591V
119868V minus1199095
120591V
(3)
1198921(119909) = sgn((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
times 1198621198891119882radic
2
120588((1 + sgn (119909
5))119901119904
2minus sgn (119909
5) 1199093)
1198922(119909) = sgn((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
times 1198621198892119882radic
2
120588((1minussgn (119909
5))119901119904
2+sgn (119909
5) 1199094)
(4)
where 120573119890is the effective bulk modulus119881
1and119881
2are effective
volumes of the two chambers 119862119894and 119862
119890are internal and
external leakage coefficients 119882 is the area gradient of thevalve orifice and 119862
1198891and 119862
1198892are flow discharge coefficients
of the spool valveSeveral physical phenomena have been taken into consid-
eration in the above model for example nonlinear friction119865119891 nonlinear spring force 119865
119904 viscous force 119865
119888 uncertain load
119865119897 discontinuous flow discharge 119892
119894 oil compliance internal
leakage and external leakage From the theoretic modelingof the electrohydraulic control system we can see that thesystem is a highly nonlinear system containing complexfeatures such as the dead band nonlinearity saturationsquared pressure drop and asymmetric response property
There are also some hard-to-model nonlinearities in(3) such as nonlinear friction nonlinear spring force anduncertain external disturbances So modeling this systemjust by physical laws fails to approximate the actual systemFurthermore identification of the unknown parameters in(3) is hard due to its demand on internal states measurementIn the followingwe adopt anH-Wmodel tomodel this highly
1198731(∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
120584(119896)
(a) Hammerstein model
1198732 (∙)119906(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(b) Wiener model
1198731(∙) 1198732 (∙)119906(119896) 119908(119896) 119910(119896)119871(119911)
119909(119896)
120584(119896)
(c) Hammerstein-Wiener model
Figure 3 Hammerstein and Wiener models
nonlinear dynamic system The H-W model is a flexibleblack-box model based on the physical insight into theactual system We identify the parameters of the H-Wmodelusing the input and output signals which can simplify theidentification process and improve the prediction accuracy byless sensors and noise
3 Hammerstein-Wiener Model
The ldquouniversalrdquo nonlinear black-box methods such as neuralnetworks Volterra series and fuzzy models are widely usedto model complex nonlinear systems Most of these meth-ods can avoid unmodeled dynamics in the aforementionedmathematical model [16 17] However these models do notprovide deep insight into the nonlinear characteristics ofthe actual system which is important in system analyzingmonitoring diagnosis and controller design In comparisonthe Hammerstein-Wiener (H-W) model possesses the flexi-bility to capture all relevant nonlinear phenomena as well asthe physical insight into the actual system In this sectionwe develop an H-W model to describe the electrohydrauliccontrol system
The H-W model is composed of an internal lineardynamic block and two static nonlinear blocks it is thecombination of Hammerstein and Wiener model The Ham-merstein model is a nonlinear model with a static nonlinearblock followed by a linear dynamic block as shown inFigure 3(a) and this N-L type of model may account foractuator nonlinearities and other input nonlinear effectsThe Wiener model has linear dynamic block followed bya nonlinear block as shown in Figure 3(b) and this L-Ntype of model mainly accounts for sensor nonlinearitiesand output nonlinear effects A series combination of aHammerstein and a Wiener model yields the H-W modelas shown in Figure 3(c) and this N-L-N type of model hasboth characteristics of the Hammerstein andWiener modelsMoreover all of the three models have proved to be able toaccurately describe a wide variety of nonlinear systems in [9]
According to the nonlinearities of the abovementionedelectrohydraulic control system for example dead band
4 Mathematical Problems in Engineering
saturation nonlinear friction nonlinear spring force andasymmetric dynamics of the cylinder we describe the inputnonlinearity (119873
1) block of the models in Figure 3 by a
two-segment polynomial nonlinearities The two-segmentpolynomial nonlinearities have the advantage of describinga system whose dynamic properties differ significantly at thepositive and negative directions [18] it has less parameters tobe estimated than a single polynomial and piecewise linearmodels [19] It can be written as
119908 (119896) =
119891 (119906 (119896)) =
1199031
sum119897=0
119891119897119906119897(119896) 119906 (119896) ge 0
119892 (119906 (119896)) =
1199031
sum119897=0
119892119897119906119897(119896) 119906 (119896) lt 0
(5)
where 119891119897and 119892
119897are parameters of the polynomial function
119906(119896) is the input 119908(119896) is the output of static nonlinearfunction119873
1 and 119903
1is the degree of the polynomial function
Define the switching function as
ℎ (119906) = 0 119906 ge 0
1 119906 lt 0(6)
Then the relation between inputs 119906(119896) and outputs119908(119896) of the input nonlinear block can be written as
119908 (119896) = 119891 (119906 (119896)) + (119892 (119906 (119896)) minus 119891 (119906 (119896))) ℎ (119906 (119896))
=
1199031
sum
119897=0
119891119897119906119897(119896) +
1199031
sum
119897=0
119901119897119906119897(119896) ℎ (119906 (119896))
(7)
where 119901119897= 119892119897minus 119891119897
The difference equationmodel 119871(119911) of the linear dynamicblock is described by an extended autoregressive (ARX)model as
119860(119911minus1) 119909 (119896) = 119911
minus119899119896119861 (119911minus1)119908 (119896) + V (119896) (8)
where 119908(119896) and 119909(119896) are the input and output of the lineardynamic block respectively V(119896) is white noise 119899
119896represents
the pure delay of the system and119860(119911minus1) and 119861(119911minus1) are scalarpolynomials in the unit delay operator 119911minus1
119860(119911minus1) = 1 + 119886
1119911minus1+ sdot sdot sdot + 119886
119899119886
119911minus119899119886
119861 (119911minus1) = 1198870+ 1198871119911minus1+ sdot sdot sdot + 119887
119899119887
119911minus119899119887
(9)
The output nonlinear block 1198732is described by a single
polynomials
119910 (119896) = 119902 (119909 (119896)) =
1199032
sum
119898=1
119902119898119909119898(119896) (10)
where 119902119898
is unknown parameter 1199032is the degree of the
polynomial function 1198732 and 119910(119896) is output of the entire
system and in this paper it represents the output velocityThe H-Wmodel of the system is depicted in Figure 4
ARX
1198731 1198732
119906(119896) 119908(119896) 119910(119896)
119871(119911)
119909(119896)
Figure 4 Schematic diagram of the H-Wmodel
4 Iterative Identification Algorithm
As we know the cascade mode of the models depicted inFigure 3 leads to composite mappings for example Ham-merstein model 119871(119873
1(119906(119896))) Wiener model 119873
2(119871(119906(119896)))
H-W model 1198732(119871(1198731(119906(119896)))) Substituting the mathematic
models of each block (ie (7) (8) and (10)) into the com-posite mappings directly leads to complex models which arestrongly nonlinear in both of the variables and the unknownparameters It is not appropriate for parameter estimation[20] In the following we apply the so-called key termseparation principle to simplify the H-Wmodel into a linear-in-parameters structure and then adopt a modified recursiveleast square algorithm with internal variable estimation toestimate both of the linear and nonlinear block parameterssimultaneously
41 Key Term Separation Principle Let 119891 119892 and ℎ be one-to-one mappings defined on nonempty sets 119880119883 and 119884 as
119891 119880 997888rarr 119883
119892 119883 997888rarr 119884
ℎ = 119892 ∘ 119891 119880 997888rarr 119884
(11)
Then the composite mapping ℎ can be given by
119910 (119905) = 119892 [119909 (119905)] = 119892 [119891 [119906 (119905)]] = ℎ [119906 (119905)] (12)
Thebasic idea of key term separation principle is a formofhalf-substitution suggested in [21] Suppose 119892 be an analyticnonlinear mapping which can be rewritten into the followingadditive form
119910 (119905) = 119909 (119905) + 119866 [119909 (119905)] (13)
Which consists of the key term 119909(119905) plus the remainder ofthe originalmapping assigned as119866(sdot) Rewrite the one-to-onemapping 119891
119909 (119905) = 119891 [119906 (119905)] (14)
We substitute (13) only into the first term in the right sideof (14) and then obtain the following mapping
119910 (119905) = 119891 [119906 (119905)] + 119866 [119909 (119905)] (15)
Equations (14) and (15) describe the mapping functionℎ in a compositional way This makes the inner mappingappears both explicitly and implicitly in the outer one whichmay be helpful for parameter identification Note that thisdecomposition technique can easily be extended to a moremultilayer composite mapping
Mathematical Problems in Engineering 5
42 Modified Least Square Algorithm In this section wedecompose the H-W model into a linear-in-parametersstructure by the key term separation principle and developa modified iterative least square algorithm with internalvariables estimation to identify all the unknown parametersof the H-W model We also apply this method to theHammerstein and Wiener models
According to the key term separation principle werewrite the output nonlinear block119873
2 that is (10) as
119910 (119896) = 1199021119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896) (16)
where the internal variable 119909(119896) is separated The dynamiclinear block 119871(119911) that is (8) can be rewritten as
119909 (119896) = 1198870119908 (119896) 119911
minus119899119896 + 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896)
(17)
where the internal variable 119908(119896) is separated Now to com-plete the sequential decomposition first we substitute (7)into (17) only for 119908(119896) in the first term and then substitutethe new equation (17) into (16) only for 119909(119896) in the first termagain The final output equation of the H-Wmodel will be
119910 (119896) = 11990211198870(119891 (119906 (119896)) + 119901 (119906 (119896)) ℎ (119906 (119896))) 119911
minus119899119896
+ 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896)
(18)
As the H-W model depicted in Figure 4 consists of threesubsystems in series the parameterization of the model isnot unique because many combinations of parameters can befound [22]Therefore one parameter in at least two blocks hasto be fixed in (18) Evidently the choices 119902
1= 1 and 119887
0= 1will
simplify the model descriptionThen the H-Wmodel can bewritten as
119910 (119896) =
1199031
sum
119897=0
119891119897119906119897(119896 minus 119899
119896) +
1199031
sum
119897=0
119901119897119906119897(119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
+
119899119887
sum
119894=1
119887119894119908 (119896 minus 119899
119896minus 119894) +
119899119886
sum
119895=1
119886119895119909 (119896 minus 119895) +
1199032
sum
119898=2
119902119898119909119898(119896)
(19)
Equation (19) is linear-in-parameters for given 119906(119896) 119909(119896)and 119908(119896) it can be written in the following least squareformat
119910 (119896) = Φ119879(119896 120579) 120579 (20)
where the internal variables 119908(119896) and 119909(119896) are estimated by(7) and (17) using the preceding estimated parameters duringeach iterative process and
Φ119879= [1 119906 (119896minus119899
119896) 119906
1199031 (119896minus119899
119896)
ℎ (119906 (119896minus119899119896)) 119906 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896))
1199061199031 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896)) 119908 (119896minus119899
119896minus1)
119908 (119896 minus 119899119896minus 119894) minus119909 (119896minus1) minus119909 (119896minus119895)
1199092(119896) 119909
1199032 (119896)]
120579 = [1198910 1198911 119891
1199031
1199010 1199011 119901
1199031
1198871 119887
119899119887
1198861 119886
119899119886
1199022 119902
1199032
] 119879
(21)
Nowwe apply themodified recursive least squaremethodwith iterative estimation of the internal variable to (20) [17]Minimizing the following least square criterion [12]
= arg min120579
119899
sum
119896=1
120582119899minus119896
[119910 (119896) minus Φ119879
(119896) 120579]
2
(22)
where 120582 ≦ 1 is the forgetting factor the formulas ofthe recursive identification algorithm supplemented withinternal variable estimation are as follows
(119896) = (119896 minus 1) +
P (119896 minus 1) Φ (119896) [119910 (119896) minus Φ119879
(119896) (119896 minus 1)]
120582 + Φ119879
(119896)P (119896 minus 1) Φ (119896)
(23)
P (119896) = P (119896 minus 1)
120582minusP (119896 minus 1) Φ (119896) Φ
119879
(119896)P (119896 minus 1)
1 + Φ119879
(119896)P (119896 minus 1) Φ (119896) 120582
(24)
(119896) =
1199031
sum
119897=0
119891119897(119896 minus 1) 119906
119897(119896) +
1199031
sum
119897=0
119897(119896 minus 1) 119906
119897(119896) ℎ (119906 (119896))
(25)
(119896) = (119896 minus 119899119896) +
119899119887
sum
119894=1
119894(119896 minus 1) (119896 minus 119899
119896minus 119894)
minus
119899119886
sum
119895=1
119895(119896 minus 1) 119909 (119896 minus 119895)
(26)
Φ (119896) = [1 119906 (119896 minus 119899119896) 119906
1199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
119906 (119896 minus 119899119896) ℎ (119906 (119896 minus 119899
119896))
1199061199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
(119896 minus 119899119896minus 1) (119896 minus 119899
119896minus 119894)
minus (119896 minus 1) minus (119896 minus 119895) 2(119896)
1199032 (119896)]119879
(27)
where P(0) = 120583I I is unit matrix and 0 lt 120583 lt infin
6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
saturation nonlinear friction nonlinear spring force andasymmetric dynamics of the cylinder we describe the inputnonlinearity (119873
1) block of the models in Figure 3 by a
two-segment polynomial nonlinearities The two-segmentpolynomial nonlinearities have the advantage of describinga system whose dynamic properties differ significantly at thepositive and negative directions [18] it has less parameters tobe estimated than a single polynomial and piecewise linearmodels [19] It can be written as
119908 (119896) =
119891 (119906 (119896)) =
1199031
sum119897=0
119891119897119906119897(119896) 119906 (119896) ge 0
119892 (119906 (119896)) =
1199031
sum119897=0
119892119897119906119897(119896) 119906 (119896) lt 0
(5)
where 119891119897and 119892
119897are parameters of the polynomial function
119906(119896) is the input 119908(119896) is the output of static nonlinearfunction119873
1 and 119903
1is the degree of the polynomial function
Define the switching function as
ℎ (119906) = 0 119906 ge 0
1 119906 lt 0(6)
Then the relation between inputs 119906(119896) and outputs119908(119896) of the input nonlinear block can be written as
119908 (119896) = 119891 (119906 (119896)) + (119892 (119906 (119896)) minus 119891 (119906 (119896))) ℎ (119906 (119896))
=
1199031
sum
119897=0
119891119897119906119897(119896) +
1199031
sum
119897=0
119901119897119906119897(119896) ℎ (119906 (119896))
(7)
where 119901119897= 119892119897minus 119891119897
The difference equationmodel 119871(119911) of the linear dynamicblock is described by an extended autoregressive (ARX)model as
119860(119911minus1) 119909 (119896) = 119911
minus119899119896119861 (119911minus1)119908 (119896) + V (119896) (8)
where 119908(119896) and 119909(119896) are the input and output of the lineardynamic block respectively V(119896) is white noise 119899
119896represents
the pure delay of the system and119860(119911minus1) and 119861(119911minus1) are scalarpolynomials in the unit delay operator 119911minus1
119860(119911minus1) = 1 + 119886
1119911minus1+ sdot sdot sdot + 119886
119899119886
119911minus119899119886
119861 (119911minus1) = 1198870+ 1198871119911minus1+ sdot sdot sdot + 119887
119899119887
119911minus119899119887
(9)
The output nonlinear block 1198732is described by a single
polynomials
119910 (119896) = 119902 (119909 (119896)) =
1199032
sum
119898=1
119902119898119909119898(119896) (10)
where 119902119898
is unknown parameter 1199032is the degree of the
polynomial function 1198732 and 119910(119896) is output of the entire
system and in this paper it represents the output velocityThe H-Wmodel of the system is depicted in Figure 4
ARX
1198731 1198732
119906(119896) 119908(119896) 119910(119896)
119871(119911)
119909(119896)
Figure 4 Schematic diagram of the H-Wmodel
4 Iterative Identification Algorithm
As we know the cascade mode of the models depicted inFigure 3 leads to composite mappings for example Ham-merstein model 119871(119873
1(119906(119896))) Wiener model 119873
2(119871(119906(119896)))
H-W model 1198732(119871(1198731(119906(119896)))) Substituting the mathematic
models of each block (ie (7) (8) and (10)) into the com-posite mappings directly leads to complex models which arestrongly nonlinear in both of the variables and the unknownparameters It is not appropriate for parameter estimation[20] In the following we apply the so-called key termseparation principle to simplify the H-Wmodel into a linear-in-parameters structure and then adopt a modified recursiveleast square algorithm with internal variable estimation toestimate both of the linear and nonlinear block parameterssimultaneously
41 Key Term Separation Principle Let 119891 119892 and ℎ be one-to-one mappings defined on nonempty sets 119880119883 and 119884 as
119891 119880 997888rarr 119883
119892 119883 997888rarr 119884
ℎ = 119892 ∘ 119891 119880 997888rarr 119884
(11)
Then the composite mapping ℎ can be given by
119910 (119905) = 119892 [119909 (119905)] = 119892 [119891 [119906 (119905)]] = ℎ [119906 (119905)] (12)
Thebasic idea of key term separation principle is a formofhalf-substitution suggested in [21] Suppose 119892 be an analyticnonlinear mapping which can be rewritten into the followingadditive form
119910 (119905) = 119909 (119905) + 119866 [119909 (119905)] (13)
Which consists of the key term 119909(119905) plus the remainder ofthe originalmapping assigned as119866(sdot) Rewrite the one-to-onemapping 119891
119909 (119905) = 119891 [119906 (119905)] (14)
We substitute (13) only into the first term in the right sideof (14) and then obtain the following mapping
119910 (119905) = 119891 [119906 (119905)] + 119866 [119909 (119905)] (15)
Equations (14) and (15) describe the mapping functionℎ in a compositional way This makes the inner mappingappears both explicitly and implicitly in the outer one whichmay be helpful for parameter identification Note that thisdecomposition technique can easily be extended to a moremultilayer composite mapping
Mathematical Problems in Engineering 5
42 Modified Least Square Algorithm In this section wedecompose the H-W model into a linear-in-parametersstructure by the key term separation principle and developa modified iterative least square algorithm with internalvariables estimation to identify all the unknown parametersof the H-W model We also apply this method to theHammerstein and Wiener models
According to the key term separation principle werewrite the output nonlinear block119873
2 that is (10) as
119910 (119896) = 1199021119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896) (16)
where the internal variable 119909(119896) is separated The dynamiclinear block 119871(119911) that is (8) can be rewritten as
119909 (119896) = 1198870119908 (119896) 119911
minus119899119896 + 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896)
(17)
where the internal variable 119908(119896) is separated Now to com-plete the sequential decomposition first we substitute (7)into (17) only for 119908(119896) in the first term and then substitutethe new equation (17) into (16) only for 119909(119896) in the first termagain The final output equation of the H-Wmodel will be
119910 (119896) = 11990211198870(119891 (119906 (119896)) + 119901 (119906 (119896)) ℎ (119906 (119896))) 119911
minus119899119896
+ 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896)
(18)
As the H-W model depicted in Figure 4 consists of threesubsystems in series the parameterization of the model isnot unique because many combinations of parameters can befound [22]Therefore one parameter in at least two blocks hasto be fixed in (18) Evidently the choices 119902
1= 1 and 119887
0= 1will
simplify the model descriptionThen the H-Wmodel can bewritten as
119910 (119896) =
1199031
sum
119897=0
119891119897119906119897(119896 minus 119899
119896) +
1199031
sum
119897=0
119901119897119906119897(119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
+
119899119887
sum
119894=1
119887119894119908 (119896 minus 119899
119896minus 119894) +
119899119886
sum
119895=1
119886119895119909 (119896 minus 119895) +
1199032
sum
119898=2
119902119898119909119898(119896)
(19)
Equation (19) is linear-in-parameters for given 119906(119896) 119909(119896)and 119908(119896) it can be written in the following least squareformat
119910 (119896) = Φ119879(119896 120579) 120579 (20)
where the internal variables 119908(119896) and 119909(119896) are estimated by(7) and (17) using the preceding estimated parameters duringeach iterative process and
Φ119879= [1 119906 (119896minus119899
119896) 119906
1199031 (119896minus119899
119896)
ℎ (119906 (119896minus119899119896)) 119906 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896))
1199061199031 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896)) 119908 (119896minus119899
119896minus1)
119908 (119896 minus 119899119896minus 119894) minus119909 (119896minus1) minus119909 (119896minus119895)
1199092(119896) 119909
1199032 (119896)]
120579 = [1198910 1198911 119891
1199031
1199010 1199011 119901
1199031
1198871 119887
119899119887
1198861 119886
119899119886
1199022 119902
1199032
] 119879
(21)
Nowwe apply themodified recursive least squaremethodwith iterative estimation of the internal variable to (20) [17]Minimizing the following least square criterion [12]
= arg min120579
119899
sum
119896=1
120582119899minus119896
[119910 (119896) minus Φ119879
(119896) 120579]
2
(22)
where 120582 ≦ 1 is the forgetting factor the formulas ofthe recursive identification algorithm supplemented withinternal variable estimation are as follows
(119896) = (119896 minus 1) +
P (119896 minus 1) Φ (119896) [119910 (119896) minus Φ119879
(119896) (119896 minus 1)]
120582 + Φ119879
(119896)P (119896 minus 1) Φ (119896)
(23)
P (119896) = P (119896 minus 1)
120582minusP (119896 minus 1) Φ (119896) Φ
119879
(119896)P (119896 minus 1)
1 + Φ119879
(119896)P (119896 minus 1) Φ (119896) 120582
(24)
(119896) =
1199031
sum
119897=0
119891119897(119896 minus 1) 119906
119897(119896) +
1199031
sum
119897=0
119897(119896 minus 1) 119906
119897(119896) ℎ (119906 (119896))
(25)
(119896) = (119896 minus 119899119896) +
119899119887
sum
119894=1
119894(119896 minus 1) (119896 minus 119899
119896minus 119894)
minus
119899119886
sum
119895=1
119895(119896 minus 1) 119909 (119896 minus 119895)
(26)
Φ (119896) = [1 119906 (119896 minus 119899119896) 119906
1199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
119906 (119896 minus 119899119896) ℎ (119906 (119896 minus 119899
119896))
1199061199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
(119896 minus 119899119896minus 1) (119896 minus 119899
119896minus 119894)
minus (119896 minus 1) minus (119896 minus 119895) 2(119896)
1199032 (119896)]119879
(27)
where P(0) = 120583I I is unit matrix and 0 lt 120583 lt infin
6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
42 Modified Least Square Algorithm In this section wedecompose the H-W model into a linear-in-parametersstructure by the key term separation principle and developa modified iterative least square algorithm with internalvariables estimation to identify all the unknown parametersof the H-W model We also apply this method to theHammerstein and Wiener models
According to the key term separation principle werewrite the output nonlinear block119873
2 that is (10) as
119910 (119896) = 1199021119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896) (16)
where the internal variable 119909(119896) is separated The dynamiclinear block 119871(119911) that is (8) can be rewritten as
119909 (119896) = 1198870119908 (119896) 119911
minus119899119896 + 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896)
(17)
where the internal variable 119908(119896) is separated Now to com-plete the sequential decomposition first we substitute (7)into (17) only for 119908(119896) in the first term and then substitutethe new equation (17) into (16) only for 119909(119896) in the first termagain The final output equation of the H-Wmodel will be
119910 (119896) = 11990211198870(119891 (119906 (119896)) + 119901 (119906 (119896)) ℎ (119906 (119896))) 119911
minus119899119896
+ 119911minus119899119896 [119861 (119911
minus1) minus 1198870]119908 (119896)
+ [1 minus 119860 (119911minus1)] 119909 (119896) +
1199032
sum
119898=2
119902119898119909119898(119896)
(18)
As the H-W model depicted in Figure 4 consists of threesubsystems in series the parameterization of the model isnot unique because many combinations of parameters can befound [22]Therefore one parameter in at least two blocks hasto be fixed in (18) Evidently the choices 119902
1= 1 and 119887
0= 1will
simplify the model descriptionThen the H-Wmodel can bewritten as
119910 (119896) =
1199031
sum
119897=0
119891119897119906119897(119896 minus 119899
119896) +
1199031
sum
119897=0
119901119897119906119897(119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
+
119899119887
sum
119894=1
119887119894119908 (119896 minus 119899
119896minus 119894) +
119899119886
sum
119895=1
119886119895119909 (119896 minus 119895) +
1199032
sum
119898=2
119902119898119909119898(119896)
(19)
Equation (19) is linear-in-parameters for given 119906(119896) 119909(119896)and 119908(119896) it can be written in the following least squareformat
119910 (119896) = Φ119879(119896 120579) 120579 (20)
where the internal variables 119908(119896) and 119909(119896) are estimated by(7) and (17) using the preceding estimated parameters duringeach iterative process and
Φ119879= [1 119906 (119896minus119899
119896) 119906
1199031 (119896minus119899
119896)
ℎ (119906 (119896minus119899119896)) 119906 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896))
1199061199031 (119896minus119899
119896) ℎ (119906 (119896minus119899
119896)) 119908 (119896minus119899
119896minus1)
119908 (119896 minus 119899119896minus 119894) minus119909 (119896minus1) minus119909 (119896minus119895)
1199092(119896) 119909
1199032 (119896)]
120579 = [1198910 1198911 119891
1199031
1199010 1199011 119901
1199031
1198871 119887
119899119887
1198861 119886
119899119886
1199022 119902
1199032
] 119879
(21)
Nowwe apply themodified recursive least squaremethodwith iterative estimation of the internal variable to (20) [17]Minimizing the following least square criterion [12]
= arg min120579
119899
sum
119896=1
120582119899minus119896
[119910 (119896) minus Φ119879
(119896) 120579]
2
(22)
where 120582 ≦ 1 is the forgetting factor the formulas ofthe recursive identification algorithm supplemented withinternal variable estimation are as follows
(119896) = (119896 minus 1) +
P (119896 minus 1) Φ (119896) [119910 (119896) minus Φ119879
(119896) (119896 minus 1)]
120582 + Φ119879
(119896)P (119896 minus 1) Φ (119896)
(23)
P (119896) = P (119896 minus 1)
120582minusP (119896 minus 1) Φ (119896) Φ
119879
(119896)P (119896 minus 1)
1 + Φ119879
(119896)P (119896 minus 1) Φ (119896) 120582
(24)
(119896) =
1199031
sum
119897=0
119891119897(119896 minus 1) 119906
119897(119896) +
1199031
sum
119897=0
119897(119896 minus 1) 119906
119897(119896) ℎ (119906 (119896))
(25)
(119896) = (119896 minus 119899119896) +
119899119887
sum
119894=1
119894(119896 minus 1) (119896 minus 119899
119896minus 119894)
minus
119899119886
sum
119895=1
119895(119896 minus 1) 119909 (119896 minus 119895)
(26)
Φ (119896) = [1 119906 (119896 minus 119899119896) 119906
1199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
119906 (119896 minus 119899119896) ℎ (119906 (119896 minus 119899
119896))
1199061199031 (119896 minus 119899
119896) ℎ (119906 (119896 minus 119899
119896))
(119896 minus 119899119896minus 1) (119896 minus 119899
119896minus 119894)
minus (119896 minus 1) minus (119896 minus 119895) 2(119896)
1199032 (119896)]119879
(27)
where P(0) = 120583I I is unit matrix and 0 lt 120583 lt infin
6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Computer
Pressure transducer
Inclinometer
Low level controller
Electrohydraulic valve
(a)
Inclinometer
Main valve
Proportionalrelief valve
119870ℎ
Mainpump
Pilotpump
ControllerReference
input
(b)
Figure 5 Experimental prototype machine
Inclinometer
Proportionalrelief valve
120579119889+
minus
119906 Digitalcontroller
Pilot pump Main pump
119876Mainvalve
Hydraulicactuator
Mechanism 120579DA
AD
I P
Figure 6 Electrohydraulic position servocontrol system
In conclusion the iterative identification algorithm canbe presented as follwos
Step 1 Set the initial values of 119909(0) 119908(0) 119906(0) and P(0)
Step 2 Estimate the parameter (119896) by algorithm (23) andcalculate P(119896) by (24)
Step 3 Estimate the internal variables (119896) and (119896) by (25)and (26) using the recent estimates of model parameters (119896)
Step 4 Update the values of Φ(119896) by (27)
Step 5 Return to Step 2 until the parameter estimates con-verge to constant values
5 Experiment
51 Experimental Environment A hydraulic excavator wasretrofitted to be controlled by computer in our laboratory[23] Figure 5 shows the prototype machine whose manualpilot hydraulic control system was replaced by electrohy-draulic proportional control system inclinometers and pres-sure transducers were also installed on the excavator arms
for position and force servocontrol Schematic diagram of theelectrohydraulic servosystem is shown in Figure 6
52 Experimental Results In order to obtain the nonlinearcharacteristics of the system when changing the directionsand to obtain sufficient excitation we adopted a multisineinput signal which contained the frequency of 005Hz 01 Hz02Hz 04Hz and 05Hz to the identification experimentsThe sample rate was chosen to be 20Hz on the machineThe input signal and angle output were obtained from thecomputer of the experiment machine Ten groups of inputand output signals with time duration of 55 seconds weresampled in the repeated experiments the averaged measure-ment results are shown in Figure 7 Finally we calculate theoutput angle velocity by numerical differentiation
We set the parameters 119899119886= 3 119899
119887= 2 119899
119896= 8 1199031= 1199032= 3
119909(0) = 0 119908(0) = 0 119906(0) = 0 and P(0) = 106I Note that
lower forgetting factor 120582 is useful for reducing the influencesof old date while a value of 120582 close to 1 is less sensitive todisturbance Therefore we chose the forgetting factor to be120582 = 098 during the first 200 samples and 120582 = 1 otherwiseCompiling the developed iterative least square algorithm inMATLAB to identify theARXmodel containing only the119871(119911)
Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
420
minus2
minus40 10 20 30 40 50
Input
Time (119905s)
Inpu
t (119906
v)
(a)
0 10 20 30 40 50
Angle output
2
15
1
Ang
le (r
ad)
Time (119905s)
(b)
Figure 7 Input and output signals of the identification experiment
The measured velocityPredicted by Hammerstein-Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(a) Hammerstein-Wiener prediction result
The measured velocityPredicted by Hammerstein
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(b) Hammerstein prediction result
The measured velocityPredicted by Wiener
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(c) Wiener prediction result
The measured velocityPredicted by ARX
06
04
02
0
minus02
minus040 2 4 6 8 10 12 14 16 18
Ang
le v
eloci
ty (r
ads
)
Time (119905s)
(d) ARX prediction result
Figure 8 Comparison results of the identified models
blockHammersteinmodel consisting of1198731and119871(119911)Wiener
model consisting of 119871(119911) and1198732 and H-Wmodel consisting
of1198731 119871(119911) and119873
2 respectively we obtain the identification
results shown in Table 1We use the identified models to predict the tracking
velocity of a general trajectory The comparative results areshown in Figures 8 and 9 They demonstrate that the H-Wand Hammerstein models which contain the input nonlinearblock with two-segment polynomial nonlinearities capturethe actual system well while the Wiener and ARX modelscannot approximate the actual system well Themean-squareerrors (MSE) of the identifiedmodels in Table 2 show that the
prediction error of the H-W model is about 13 54 and58 less than the Hammerstein Wiener and ARX modelsrespectively
6 Conclusion
This paper investigates the nonlinear modeling and identi-fication of an electrohydraulic control system We develop atheoretic state spacemodel for system analysis propose anH-W model for the highly nonlinear system based on a deeplyphysical insight into the actual system and apply a modified
8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
05
04
03
02
01
0
minus01
minus02
minus03
0 2 4 6 8 10 12 14 16 18
Estim
atio
n re
sidua
(rad
s)
Residua of Hammerstein-WienerResidua of Hammerstein
Residua of WeinerResidua of ARX
Time (119905s)
Figure 9 Comparison of the estimation residua
Table 1 The identification results
Parameters Model typeH-W Hammerstein Wiener ARX
1198870
1 1 minus00358 minus002761198871
00349 00105 00151 001241198872
00617 00147 minus00069 005141198861
minus00309 minus00596 00069 minus006611198862
minus00598 minus00613 minus00075 minus006531198863
minus00897 minus00610 minus00081 minus006191198910
00109 00027 mdash mdash1198911
minus14619 times 10minus5 00012 mdash mdash1198912
minus00050 minus00012 mdash mdash1198913
00052 00045 mdash mdash1199010
minus00165 minus00055 mdash mdash1199011
00033 00013 mdash mdash1199012
00104 00036 mdash mdash1199013
minus00010 minus86858 times 10minus4 mdash mdash1199021
1 mdash 1 mdash1199022
00050 mdash 00013 mdash1199023
63562 times 10minus4 mdash 26895 times 10minus4 mdash
Table 2 MSE of the identified models
Errors Model typeH-W Hammerstein Wiener ARX
120575r sdot sminus1 00321 00417 01081 01218
recursive least square method with internal variables esti-mation to identify its parameters The main findings of thepaper include the follwoing (1) the proposed H-W modelsimplifies the identification procedure because it only uses theinput and output signals to identify all the parameters (2)TheH-W model containing the input nonlinear block with two-segment polynomial nonlinearities captures the actual systemverywell As shown by the comparative results the prediction
error of the H-Wmodel is about 13 54 and 58 less thanthe Hammerstein Wiener and ARX models respectivelyThe results provide a physical insight into the nonlinearcharacteristics of the actual system which is important forsystem analyzing monitoring and diagnosis Future workincludes addressing uncertain and fuzzy properties of thesystem [24 25] and extending the model for a wider rangeof equipment [26]
Acknowledgment
Thisworkwas supported in part by grants fromNational Nat-ural Science Foundation (Grant nos 51175511 and 61105073)of China
References
[1] H E Merritt Hydraulic Control System John Wiley amp SonsNew York USA 1967
[2] B Yao F Bu J Reedy and G T C Chiu ldquoAdaptive robustmotion control of single-rod hydraulic actuators theory andexperimentsrdquo IEEEASME Transactions on Mechatronics vol 5no 1 pp 79ndash91 2000
[3] S Wen W Zheng J Zhu X Li and S Chen ldquoElman fuzzyadaptive control for obstacle avoidance of mobile robots usinghybrid forceposition incorporationrdquo IEEE Transactions onSystems Man and Cybernetics C vol 42 no 4 pp 603ndash6082012
[4] S Y Chen J Zhang H Zhang N M Kwok and Y F Li ldquoIntel-ligent lighting control for vision-based robotic manipulationrdquoIEEE Transactions on Industrial Electronics vol 59 no 8 pp3254ndash3263 2012
[5] Q H He P Hao and D Q Zhang ldquoModeling and parameterestimation for hydraulic system of excavatorrsquos armrdquo Journal ofCentral South University of Technology vol 15 no 3 pp 382ndash386 2008
[6] K Ziaei and N Sepehri ldquoModeling and identification ofelectrohydraulic servosrdquo Mechatronics vol 10 no 7 pp 761ndash772 2000
[7] L Wang B Wu R Du and S Yang ldquoNonlinear dynamic char-acteristics of moving hydraulic cylinderrdquo Chinese Journal ofMechanical Engineering vol 43 no 12 pp 12ndash19 2007
[8] M Jelali and H Schwarz ldquoNonlinear identification of hydraulicservo-drive systemsrdquo IEEE Control Systems Magazine vol 15no 5 pp 17ndash22 1995
[9] S Kleinsteuber and N Sepehri ldquoA polynomial network mod-eling approach to a class of large-scale hydraulic systemsrdquoComputers and Electrical Engineering vol 22 no 2 pp 151ndash1681996
[10] H Yousefi H Handroos and A Soleymani ldquoApplication of dif-ferential evolution in system identification of a servo-hydraulicsystem with a flexible loadrdquoMechatronics vol 18 no 9 pp 513ndash528 2008
[11] F Giri and E W Bai Block-Oriented Nonlinear System Identi-fication vol 404 of Lecture Notes in Control and InformationSciences Springer Berlin Germany 2010
[12] B -J Kwak A E Yagle and J A Levitt ldquoNonlinear systemidentification of hydraulic actuator friction dynamics using aHammerstein modelrdquo in Proceedings of the IEEE InternationalConference on Acoustics Speech and Signal Processing vol 4 pp1933ndash1936 Seattle Wash USA 1998
Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[13] Y J Zheng S Y Chen Y Lin and W L Wang ldquoBio-Inspired optimization of sustainable energy systems a reviewrdquoMathematical Problems in Engineering vol 2013 Article ID354523 12 pages 2013
[14] C Cattani R Badea S Chen and M Crisan ldquoBiomedicalsignal processing and modeling complexity of living systemsrdquoComputational and Mathematical Methods in Medicine vol2012 Article ID 298634 2 pages 2012
[15] B Li J Yan A X Liu Y H Zeng and G Guo ldquoNonlinearidentification of excavatorrsquos electro-hydraulic servo systemrdquoTransactions of the Chinese Society For Agricultural Machineryvol 43 no 4 pp 20ndash25 2012
[16] J Ljung System IdentificationTheory for the User Prentice HallPress New York NY USA 1999
[17] S ChenWHuang C Cattani andG Altieri ldquoTraffic dynamicson complex networks a surveyrdquo Mathematical Problems inEngineering vol 2012 Article ID 732698 23 pages 2012
[18] J Voros ldquoIterative algorithm for parameter identification ofHammerstein systems with two-segment nonlinearitiesrdquo IEEETransactions onAutomatic Control vol 44 no 11 pp 2145ndash21491999
[19] J Voros ldquoRecursive identification of Hammerstein systemswith discontinuous nonlinearities containing dead-zonesrdquoIEEE Transactions on Automatic Control vol 48 no 12 pp2203ndash2206 2003
[20] J Voros ldquoAn iterative method for Hammerstein-Wiener sys-tems parameter identificationrdquo Journal of Electrical Engineeringvol 55 no 11-12 pp 328ndash331 2004
[21] J Voros ldquoIdentification of nonlinear dynamic systems usingextended Hammerstein and Wiener modelsrdquo Control Theoryand Advanced Technology vol 10 no 4 part 2 pp 1203ndash12121995
[22] E-W Bai ldquoA blind approach to theHammerstein-Wienermodelidentificationrdquo Automatica vol 38 no 6 pp 967ndash979 2002
[23] J Yan B Li Q Z Tu G Gang and Y H Zeng ldquoAutomatizationof excavator and study of its auto-controlrdquo in Proceedings ofthe 3rd International Conference on Measuring Technology andMechatronics Automation pp 604ndash609 Shanghai China 2011
[24] Y J Zheng andH F Ling ldquoEmergency transportation planningin disaster relief supply chain management a cooperative fuzzyoptimization approachrdquo Soft Computing 2013
[25] Y J Zheng and S Y Chen ldquoCooperative particle swarm opti-mization for multiobjective transportation planningrdquo AppliedIntelligence 2013
[26] Y Zheng S Chen and H Ling ldquoEfficient multi-objective tabusearch for emergency equipment maintenance scheduling indisaster rescuerdquo Optimization Letters vol 7 no 1 pp 89ndash1002013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of