Embed Size (px)
Citation preview

Research ArticleNonlinear Current Control for Reluctance Actuator withHysteresis Compensation
Yu-Ping Liu1 Kang-Zhi Liu1 and Xiaofeng Yang2
1 Department of Electrical and Electronic Engineering Chiba University Chiba 263-8522 Japan2Department of Microelectronics Fudan University Shanghai 200243 China
Correspondence should be addressed to Yu-Ping Liu ericliuyupinggmailcom
Received 15 August 2014 Accepted 4 October 2014 Published 21 October 2014
Academic Editor Shengwei Mei
Copyright copy 2014 Yu-Ping Liu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The next-generation fine stage of the wafer scanner needs a suitable actuator to meet the requirements of high speed highacceleration and high precisionThe voice coil actuator is no longer the best choice because of its large size and the heat dissipationis difficult to solve The reluctance actuator can provide a big force based on a unique property of small volume and low currentmaking it a very suitable candidate But the strong nonlinearity such as the hysteresis between the current and force limits thereluctance actuator applications in nanometer positioning This paper proposes a nonlinear current control configuration withhysteresis compensation using the adaptive multilayer neural network Simulation results show that the hysteresis compensator iseffective in overcoming the hysteresis and is promising in precision control applications
1 Introduction
In high-precision applications such as semiconductor lithog-raphy systems the force density and accuracy of waferscanner increase rapidly in recent years [1] Forwafer scannerit needs accurate positioning tomeet the requirement of high-precision actuation It is realized by a fine stage mounted ona coarse stage The fine stage has a millimeter range with anaccuracy of nanometers and the coarse stage has a range ofmeters with the accuracy of submicrometers
In conventional design of fine stage actuators the rela-tively low variation of the force is the main reason to choosefor voice coil actuator But in the development of new short-stroke actuator the production speed and the positioningaccuracy gain more importance [2] A higher throughput isachieved by increasing the acceleration of the fine actuatorIf voice coil actuator is still used to achieve greater force itssize will become very large and the heat dissipation problemwill be very difficult to solve [3] Therefore the voice coilactuator is no longer the best choice as the main drivingactuator of fine stage Because the reluctance actuator whoseforce is proportional to the square of the excitation currentcan produce greater force with a small volume and lowcurrent than the voice coil motor it provides a solution to
meet the driving requirements of the next-generation finestage
The mentioned advantage of the reluctance actuatorcomes at a sacrifice of parasitic effects such as the eddy cur-rent and hysteresis which deteriorate the force predictabil-ity and add additional nonlinearity to the actuator Theseeffects can be reduced by using magnetic cores made ofthin laminations of soft ferromagnetic materials From theanalysis in reference paper [4] the eddy current is not visiblebelow kHz range with thin laminations of soft ferromagneticmaterial and the main factor causing the force error isthe hysteresis When specification of the force predictabilitybecomes very strict the current air-gap force is no longer asingle-valued function and hysteresis in soft ferromagneticmaterials becomes dominant So the hysteresis has to bemodeled and compensated to obtain a predictable force tomeet required positioning accuracy in nanometer range
A variety of the models and compensation algorithmshave been developed for the hysteresis [5] The classicalapproach is to construct a hysteresis inverse and use it asa feed-forward compensator [6] together with a feedbackcontrol The hysteresis compensation method via Preisachmodel inversion has been proposed in paper [7] An inverse
Hindawi Publishing CorporationJournal of Control Science and EngineeringVolume 2014 Article ID 150345 7 pageshttpdxdoiorg1011552014150345
2 Journal of Control Science and Engineering
r(k)
k
(a)
y(k)
r(k)
(b)
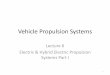
Figure 1 Input 119903(119896) (a) and the corresponding output 119910(119896) map (b) trajectories of the parametric hysteresis operator
parametric hysteresis model [8] was used in current-modeoperated reluctance force actuator However the abovemeth-ods need precise hysteresis model which is usually complexand hard to obtain
Owing to the online self-learning and estimate ability ofthe neural network it provides a good solution for solvingnonlinear problems In particular the multilayer neuralnetwork (MNN) is effectively used in nonlinear discrete-time system identification and control [9] Although a lot ofresearches have been done on the neural network applicationto the hysteresis [10 11] the neural network compensation forthe current-driven reluctance actuator with hysteresis has yetto be studied
Themain contribution of this paper is a nonlinear currentcontroller with hysteresis compensation for current-drivenreluctance linear actuator using the adaptive MNN proposedfor the first time Concretely speaking based on the input-output feature of the hysteresis in reluctance force and thelearning and approximation ability of neural network a hys-teresis current compensator is proposed using the adaptiveMNN [9] whose weight is updated by the error betweenthe desired force and the actual force The main advantageof the promosed compensation method is that the inversehysteresis model is not required Do the simulations onthe reluctance actuator model with hysteresis and EI pairsstage and the simulation results show that the nonlinearcurrent control with hysteresis compensator is effective inovercoming the hysteresis and promising in high-precisionand high-acceleration control applications
This paper is organized as follows In Section 2 paramet-ric hysteresis operator is reviewed In Section 2 reluctanceactuator models with and without hysteresis are reviewedA nonlinear current control with hysteresis compensatorusing the adaptive MNN is presented in Section 3 Finallysimulation results are illustrated in Section 4
2 Parametric Hysteresis Operator
Hysteresis is encountered over a wide range of applicationsthat usually involve magnetic ferroelectric mechanical oroptical systems It is a complex nonlinearity that displaysthe properties of bifurcation and nonlocal memory Thehysteresis can be defined as a loop in the input-outputmap In this paper the parametric hysteresis operator [4] is
reviewed which is defined in the discrete-time domain sothe implementation is more straightforward
Definition 1 Let 119903(119896) 119910(119896) be bounded 1205821 1205822gt 0 Then the
parametric hysteresis operator
119910 (119896) = 119867hys [119903 (119896) 1205821 1205822] (1)
is defined as followswhen 119903(119896 + 1) minus 119903(119896) ge 0
119910 (119896) = 119903 (119896) + 1199100minus 1199030+ 119898 minus
1
1205822
119882(1205822119898 sdot 1198901205822(119898+119903(119896)minus119903
0))
(2)
when 119903(119896 + 1) minus 119903(119896) lt 0
119910 (119896) = 119903 (119896) + 1199100minus 1199030minus 119899 +
1
1205822
119882(1205822119899 sdot 1198901205822(119899minus119903(119896)+119903
0))
(3)
where 119898 = 1205821+ 1199030minus 1199100and 119899 = 120582
1minus 1199030+ 1199100 1199030= 119903(119896lowast) and
1199100
= 119910(119896lowast) The indicator 119896
lowast denotes the last time instantbefore 119896 when the difference of 119903 changed sign that is anextremum occurred which corresponds to a corner point ofthe 119910-119903 curve in Figure 1 The parameter 120582
1represents the
amount of hysteresis around the straight line 119903(119896) = 119910(119896)
and defines the asymptotes while the parameter 1205822defines
the smoothness of the hysteresis loops that is the rate ofconvergence towards the left or right asymptote 119882 is theprincipal branch of the Lambert 119882 function [12]
3 Problem Statement
31 Reluctance Actuator Models with and without HysteresisReluctance linear actuator is a type of electric motor thatinduces nonpermanent magnetic poles on the ferromagneticrotor and produces temporary magnetic The reluctanceactuator is named as such because it usesmagnetic reluctanceto generate force which can be called reluctance force TheEI-core actuator is the most basic linear reluctance linearactuator [13] As shown in Figure 2 the actuator includes agenerally Cobalt-Iron ldquoErdquo shaped electromagnet and an ldquoIrdquoshaped targetThe electromagnet has an electrical coil woundaround the center section Current flowing through the coilgenerates a magnetic flux and this flux creates a reluctance
Journal of Control Science and Engineering 3
i
N lm
xg
E-core I-target
FF
B
Figure 2 Sketches of the EI actuator
B
H
Figure 3 Typical B-H hysteresis curve
force on the target The amount of current determinesthe amount of reluctance force The reluctance force actingon the ldquoIrdquo target is described [13] by
119865 = 119896
1198942
1199092
119892
(4)
where 119896 = 120583011987321198604 120583
0is the permeability of air 119873 is the
number of turns in coil on the center leg of the E-core and119860
is the area of the air gap It is a lumpedmodelwhich disregardsnonmodeled effects such as hysteresis leakage fringing andsaturation
However the E-core coil uses the soft magnetic materialwhich has magnetic hysteresis [14] between the magneticfield 119867 and the bulk magnetic flux density 119861 and the typical119861-119867 curve is illustrated in Figure 3 It is assumed that thehysteretic 119861-119867 curve can be modeled [4] by the parametrichysteresis operator (4) Then it can get a reluctance linearactuator model with hysteresis [8] as
119865 = 119896
[119867hys (119894 1205821 1205822)]2
1199092
119892
(5)
This model contains both the hysteresis and obvioussquare linearity between the input and output
32 Nonlinear Current Control for Reluctance Actuatorwithout Hysteresis Compensator A typical structure of thecurrent-driven reluctance linear actuator control is shown inFigure 4 Due to the unstable nature of the electromagnetic
i F
Setpoint Fd id
C Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Positionsensor
xg
minus
Figure 4 Typical current-driven reluctance actuator control loop
forces a feedback control loop is required to achieve stableperformance In Figure 4 ldquoCrdquo denotes a linear positioncontroller such as the proportional-integral-derivative (PID)controller which guarantees the stability of the closed loopThe position controller uses the position in the air gap mea-sured by a position sensor to generate the force command 119865
119889
The power amplifier supplies the current for the reluctanceactuator
From (4) a nonlinear current controller without hystere-sis compensator [15] can be obtained as
119894119889=
radic
119865119889sdot 1199092
119892
119896119889
(6)
where 119896119889is the estimate of real constant 119896
The above nonlinear current compensator does not con-sider the hysteresis in the reluctance force From the analysisof the hysteresis influence in the section of introduction it isnecessary to find a hysteresis compensation method for thereluctance linear actuator in the high-precision positioningIn the following a hysteresis compensator for the reluctancelinear actuator based on the adaptive MNNwill be proposed
33 Nonlinear Current Control for Reluctance Actuator withHysteresis Compensator In control engineering artificial NNcan be used as a universal function approximator whichinspires using NN as an emulator to approximate unknownnonlinearity Many types of neural networks have beenapplied such as the high-order neural networks (HONN)radial basis function neural networks (RBF) and multilayerneural network (MNN) For MNN its universal approx-imation ability parallel distributed processing ability andlearning and adaptation ability make it one of the mostpopular tools in nonlinear control [9]
MNN is a static feed-forward network that consists of anumber of layers each layer having a number of McCulloch-Pitts neurons Due to its hidden layers the MNN has animportant character that it can approximate any continu-ous nonlinear function Once the hidden layers have beenselected only the adjustable weights have to be determinedto specify the networks completely Owing to the aboveadvantages of MNN a nonlinear current controller withhysteresis compensator for the current-driven reluctanceactuator force using the adaptive MNN can be obtained asshown in Figure 5 The feedback force 119865 can be estimatedfrom the relation 119865 = 119898119886 with 119898 the stage mass and 119886 theactual accelerationThe actual acceleration 119886 can bemeasuredby an accelerometer or computed from the measured gap
4 Journal of Control Science and Engineering
a
Fd id idd
+ic
i
V W
+
minus120576
MNN
m
Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Adaptive laws
Hysteresis current compensator
AccelerometerF
Figure 5 Structure of hysteresis current compensator using adap-tive MNN
position 119909119892by a digital double differentiator The double
differentiation may introduce a noise However when usinga filter such as the least-square method and considering thenoise level it makes double differentiation acceptable as amethod to calculate the stage acceleration [16] In this paperthe acceleration 119886 is measured by the accelerometer Thedetails of the adaptive MNN are as follows
The nonlinear current controller with hysteresis compen-sator can be defined as
119894119889119889
(119896) = 119894119889(119896) + 119894
119888(119896) (7)
where the hysteresis current compensator in (7) is estimatedby the following MNN
119894119888(119896) = WT
(k) S (VT(k) x (k)) (8)
whereW(k) isin R119897 andV(k) isin R(119899+1)times119897 are weighting matrices119897 is the number of hidden-layer neurons x(119896) = [x119879(119896) 1]119879 isin
R119899+1 denotes the input vector of the neural network andS(V119879(119896)x(119896)) = [119904(V119879
1(119896)x(119896)) 119904(V119879
119897(119896)x(119896)) 1]119879 isin R119897
with 119904(119909) = 1(1 + 119890minus119909
)The force error is
120576 (119896 + 1) = 119865119889(119896) minus 119865 (119896) (9)
The adaptive update law of the neural network weights ischosen as
W (119896 + 1) = W (119896) minus Proj119882
[120574119908S (119896) 120576 (119896 + 1)] (10)
V (119896 + 1) = V (119896) minus ProjV [120574Vz119897W119879(119896) S1015840 (119905) 120576 (119896 + 1)]
(11)
where 120574119908and 120574V are the learning rates with positive constants
S(119896) = diag1199041(119896) 119904
119897(119896) with 119904
119894(119896) = 119904(V119879
119894x(119896)) and
z119897= [1radic119897 1radic119897]
119879
(z = 1) is a vector compatible with
V(119896) Since the output of the hidden layer neural network isdirectly related to the input of the outputweight so the outputweightW is introduced in (10) S1015840(119896) = diag1199041015840
1(119896) 119904
1015840
119897(119896)
is a diagonal matrix with 1199041015840
119894(119896) = 119904
1015840(V119879119894x(119896)) The projection
function Proj120579(lowast) is defined as Proj
120579(lowast) = Proj
120579(lowast119895119896)whose
element in the 119895th row and 119896th column is
Proj120579(lowast119895119896) =
minuslowast119895119896 if
120579119895119896
= 120588120579119895119896max lowast
119895119896lt 0
120579119895119896
= 120588120579119895119896min lowast
119895119896gt 0
lowast119895119896 otherwise
(12)
where lowast is either a vector or matrix with its element beinglowast119895119896 120588120579119895119896min and 120588
120579119895119896max are presumed as upper and lower
boundaries of 120579119894119895 and 120579 denotes W and V However due
to the fact that those bounds may not be known a prioricertain fictitious large enough bounds can be used [17] It isjust needed to limit the output amplitude of the output ofadaptive MNN equation (7) for example corresponding tothe power amplifier input limit plusmn10 v
The hysteresis compensation algorithm using adaptiveMNN can be summarized as follows
Step 1 Construct the input of adaptive neural network x(119896)and estimate 119894
119888(119896)
Step 2 Calculate the hysteresis compensation current 119894119888(119896)
using (8)
Step 3 Calculate the force error 120576(119896 + 1) using (9)
Step 4 Update the neural networksweight using (10) and (11)
Step 5 Let 119896 = 119896 + 1 return to Step 1
4 Simulation
Example 1 A simulation for the current-driven reluctanceactuator is conducted to verify the performance of theproposed hysteresis compensation configuration shown inFigure 7
In this simulation since the linear power amplifier hasa high bandwidth and rapid response it is ignored A forcecommand 119865
119889is imposed without a counter balance force the
I-target would be pulled to the E-core For this reason it isassumed that the I-target is fixed so that we may investigatethe force tracing performanceThe reluctance linear actuatorwith hysteresis is modeled by (5) whose parameters arechosen as in the patent [15] the maximum force is about200N the maximum gap 119909
119892between the E-core and I-target
is 04mm and the constant 119896 = 773 times 10minus6 To reproduce
a reluctance actuator model with nonsmooth hysteresis theparameter 120582
2of the hysteretic operator would have to be
infinitely large Here the hysteresis operator parameters arechosen as 120582
1= 002 and 120582
2= 10
The control objective is to make the system output 119865
follow the reference force 119865119889 A nontrivial reference force is
depicted in Figure 6 This profile is used to test the propo-sed nonlinear controller with hysteresis compensation with
Journal of Control Science and Engineering 5
0 2 4 6 8 10 12 14 160
50
100
150
200
Refe
renc
e for
ce (N
)
t (s)
Figure 6 Reference force
0 50 100 150 200
0
05
1
15
2
Reference force
Forc
e err
or (N
)
Without hysteresis compensationWith hysteresis compensation
minus2
minus15
minus1
minus05
Figure 7 The maps between the reference force and the forcetracking error
respect to higher order reversal curvesThe parameters of theadaptive MNN are determined as follows the input vector ofthe neural network is chosen as x(119896) = [119865
119889(119896+1) 119865
119889(119896) 119865(119896+
1) 119865(119896)] the number of hidden-layer neurons is 119897 = 40 theinitial neural network weighting matrices are w(0) = 0 andv(0) = 0 and the learning rate is selected as 120574
119908= 00006 and
120574V = 001 respectivelyThe maps between the reference force 119865
119889and the force
tracking error with nonlinear current control without hys-teresis compensation and with nonlinear current controlwith hysteresis compensation are shown in Figure 7 Thelargest force tracking error without hysteresis compensationis about plusmn2N With hysteresis compensation it is aboutplusmn01 N Furthermore Figure 8 shows that the ratio betweenthe output force 119865 and its reference command 119865
119889with and
without hysteresis compensator and the ratio with hysteresiscompensation is very close to 1 From the simulation resultsit is clear that the force with hysteresis compensation hasa much smaller force tracking error than without hysteresiscompensation
Example 2 In order to verify if the proposed hysteresis com-pensation method can be applied in high-precision systems
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Reference force
Out
put f
orce
Without hysteresis compensationWith hysteresis compensation
80 85 9070
80
90
100
Figure 8 Comparison of the force hysteresis loop between forcegenerations without hysteresis compensation and with hysteresiscompensation
E-core 2 I-target 2
i2F2
xg2 xg1
i1F1
Stage
x
E-core 1I-target 1
Figure 9 EI-core type actuator pairs
we do the following simulation using the reluctance actuatorto drive a one degree of freedom stage
Due to the nature of the reluctance force an EI coreactuator can only generate a unidirectional attractive forceTo generate an active force in the opposite direction asecond actuator needs to be placed on the opposite side ofthe I-target Figure 9 illustrates a simplified actuator pairsincluding electromagnetic actuators E-core 1 and E-core 2 aswell as a stage [15]The gap 119909
1198921separates the E-core 1 and the
I-target 1 and the gap1199091198922separates E-core 2 and I-target 2The
stage mass is 10 kg the position sensor resolution is 1 nm thesampling time is 05ms and the bias force is119865
0= 15Nwhich
is applied on both EI actuators The E-core electromagneticconstant is 119896 = 773times10
minus6 The gaps 1199091198921and 119909
1198922between the
E-cores 1 2 and the I-targets 1 2 are in the range of 0 120583m to400 120583m and the initial gap is 119909
1198920= 400 120583m The parameters
of hysteresis operator are set as in Example 1The stage control system uses the proportional-integral
(PI) controller to guarantee the stability of the closed-loopposition system while the nonlinear current controller with
6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Control Science and Engineering
r(k)
k
(a)
y(k)
r(k)
(b)
Figure 1 Input 119903(119896) (a) and the corresponding output 119910(119896) map (b) trajectories of the parametric hysteresis operator
parametric hysteresis model [8] was used in current-modeoperated reluctance force actuator However the abovemeth-ods need precise hysteresis model which is usually complexand hard to obtain
Owing to the online self-learning and estimate ability ofthe neural network it provides a good solution for solvingnonlinear problems In particular the multilayer neuralnetwork (MNN) is effectively used in nonlinear discrete-time system identification and control [9] Although a lot ofresearches have been done on the neural network applicationto the hysteresis [10 11] the neural network compensation forthe current-driven reluctance actuator with hysteresis has yetto be studied
Themain contribution of this paper is a nonlinear currentcontroller with hysteresis compensation for current-drivenreluctance linear actuator using the adaptive MNN proposedfor the first time Concretely speaking based on the input-output feature of the hysteresis in reluctance force and thelearning and approximation ability of neural network a hys-teresis current compensator is proposed using the adaptiveMNN [9] whose weight is updated by the error betweenthe desired force and the actual force The main advantageof the promosed compensation method is that the inversehysteresis model is not required Do the simulations onthe reluctance actuator model with hysteresis and EI pairsstage and the simulation results show that the nonlinearcurrent control with hysteresis compensator is effective inovercoming the hysteresis and promising in high-precisionand high-acceleration control applications
This paper is organized as follows In Section 2 paramet-ric hysteresis operator is reviewed In Section 2 reluctanceactuator models with and without hysteresis are reviewedA nonlinear current control with hysteresis compensatorusing the adaptive MNN is presented in Section 3 Finallysimulation results are illustrated in Section 4
2 Parametric Hysteresis Operator
Hysteresis is encountered over a wide range of applicationsthat usually involve magnetic ferroelectric mechanical oroptical systems It is a complex nonlinearity that displaysthe properties of bifurcation and nonlocal memory Thehysteresis can be defined as a loop in the input-outputmap In this paper the parametric hysteresis operator [4] is
reviewed which is defined in the discrete-time domain sothe implementation is more straightforward
Definition 1 Let 119903(119896) 119910(119896) be bounded 1205821 1205822gt 0 Then the
parametric hysteresis operator
119910 (119896) = 119867hys [119903 (119896) 1205821 1205822] (1)
is defined as followswhen 119903(119896 + 1) minus 119903(119896) ge 0
119910 (119896) = 119903 (119896) + 1199100minus 1199030+ 119898 minus
1
1205822
119882(1205822119898 sdot 1198901205822(119898+119903(119896)minus119903
0))
(2)
when 119903(119896 + 1) minus 119903(119896) lt 0
119910 (119896) = 119903 (119896) + 1199100minus 1199030minus 119899 +
1
1205822
119882(1205822119899 sdot 1198901205822(119899minus119903(119896)+119903
0))
(3)
where 119898 = 1205821+ 1199030minus 1199100and 119899 = 120582
1minus 1199030+ 1199100 1199030= 119903(119896lowast) and
1199100
= 119910(119896lowast) The indicator 119896
lowast denotes the last time instantbefore 119896 when the difference of 119903 changed sign that is anextremum occurred which corresponds to a corner point ofthe 119910-119903 curve in Figure 1 The parameter 120582
1represents the
amount of hysteresis around the straight line 119903(119896) = 119910(119896)
and defines the asymptotes while the parameter 1205822defines
the smoothness of the hysteresis loops that is the rate ofconvergence towards the left or right asymptote 119882 is theprincipal branch of the Lambert 119882 function [12]
3 Problem Statement
31 Reluctance Actuator Models with and without HysteresisReluctance linear actuator is a type of electric motor thatinduces nonpermanent magnetic poles on the ferromagneticrotor and produces temporary magnetic The reluctanceactuator is named as such because it usesmagnetic reluctanceto generate force which can be called reluctance force TheEI-core actuator is the most basic linear reluctance linearactuator [13] As shown in Figure 2 the actuator includes agenerally Cobalt-Iron ldquoErdquo shaped electromagnet and an ldquoIrdquoshaped targetThe electromagnet has an electrical coil woundaround the center section Current flowing through the coilgenerates a magnetic flux and this flux creates a reluctance
Journal of Control Science and Engineering 3
i
N lm
xg
E-core I-target
FF
B
Figure 2 Sketches of the EI actuator
B
H
Figure 3 Typical B-H hysteresis curve
force on the target The amount of current determinesthe amount of reluctance force The reluctance force actingon the ldquoIrdquo target is described [13] by
119865 = 119896
1198942
1199092
119892
(4)
where 119896 = 120583011987321198604 120583
0is the permeability of air 119873 is the
number of turns in coil on the center leg of the E-core and119860
is the area of the air gap It is a lumpedmodelwhich disregardsnonmodeled effects such as hysteresis leakage fringing andsaturation
However the E-core coil uses the soft magnetic materialwhich has magnetic hysteresis [14] between the magneticfield 119867 and the bulk magnetic flux density 119861 and the typical119861-119867 curve is illustrated in Figure 3 It is assumed that thehysteretic 119861-119867 curve can be modeled [4] by the parametrichysteresis operator (4) Then it can get a reluctance linearactuator model with hysteresis [8] as
119865 = 119896
[119867hys (119894 1205821 1205822)]2
1199092
119892
(5)
This model contains both the hysteresis and obvioussquare linearity between the input and output
32 Nonlinear Current Control for Reluctance Actuatorwithout Hysteresis Compensator A typical structure of thecurrent-driven reluctance linear actuator control is shown inFigure 4 Due to the unstable nature of the electromagnetic
i F
Setpoint Fd id
C Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Positionsensor
xg
minus
Figure 4 Typical current-driven reluctance actuator control loop
forces a feedback control loop is required to achieve stableperformance In Figure 4 ldquoCrdquo denotes a linear positioncontroller such as the proportional-integral-derivative (PID)controller which guarantees the stability of the closed loopThe position controller uses the position in the air gap mea-sured by a position sensor to generate the force command 119865
119889
The power amplifier supplies the current for the reluctanceactuator
From (4) a nonlinear current controller without hystere-sis compensator [15] can be obtained as
119894119889=
radic
119865119889sdot 1199092
119892
119896119889
(6)
where 119896119889is the estimate of real constant 119896
The above nonlinear current compensator does not con-sider the hysteresis in the reluctance force From the analysisof the hysteresis influence in the section of introduction it isnecessary to find a hysteresis compensation method for thereluctance linear actuator in the high-precision positioningIn the following a hysteresis compensator for the reluctancelinear actuator based on the adaptive MNNwill be proposed
33 Nonlinear Current Control for Reluctance Actuator withHysteresis Compensator In control engineering artificial NNcan be used as a universal function approximator whichinspires using NN as an emulator to approximate unknownnonlinearity Many types of neural networks have beenapplied such as the high-order neural networks (HONN)radial basis function neural networks (RBF) and multilayerneural network (MNN) For MNN its universal approx-imation ability parallel distributed processing ability andlearning and adaptation ability make it one of the mostpopular tools in nonlinear control [9]
MNN is a static feed-forward network that consists of anumber of layers each layer having a number of McCulloch-Pitts neurons Due to its hidden layers the MNN has animportant character that it can approximate any continu-ous nonlinear function Once the hidden layers have beenselected only the adjustable weights have to be determinedto specify the networks completely Owing to the aboveadvantages of MNN a nonlinear current controller withhysteresis compensator for the current-driven reluctanceactuator force using the adaptive MNN can be obtained asshown in Figure 5 The feedback force 119865 can be estimatedfrom the relation 119865 = 119898119886 with 119898 the stage mass and 119886 theactual accelerationThe actual acceleration 119886 can bemeasuredby an accelerometer or computed from the measured gap
4 Journal of Control Science and Engineering
a
Fd id idd
+ic
i
V W
+
minus120576
MNN
m
Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Adaptive laws
Hysteresis current compensator
AccelerometerF
Figure 5 Structure of hysteresis current compensator using adap-tive MNN
position 119909119892by a digital double differentiator The double
differentiation may introduce a noise However when usinga filter such as the least-square method and considering thenoise level it makes double differentiation acceptable as amethod to calculate the stage acceleration [16] In this paperthe acceleration 119886 is measured by the accelerometer Thedetails of the adaptive MNN are as follows
The nonlinear current controller with hysteresis compen-sator can be defined as
119894119889119889
(119896) = 119894119889(119896) + 119894
119888(119896) (7)
where the hysteresis current compensator in (7) is estimatedby the following MNN
119894119888(119896) = WT
(k) S (VT(k) x (k)) (8)
whereW(k) isin R119897 andV(k) isin R(119899+1)times119897 are weighting matrices119897 is the number of hidden-layer neurons x(119896) = [x119879(119896) 1]119879 isin
R119899+1 denotes the input vector of the neural network andS(V119879(119896)x(119896)) = [119904(V119879
1(119896)x(119896)) 119904(V119879
119897(119896)x(119896)) 1]119879 isin R119897
with 119904(119909) = 1(1 + 119890minus119909
)The force error is
120576 (119896 + 1) = 119865119889(119896) minus 119865 (119896) (9)
The adaptive update law of the neural network weights ischosen as
W (119896 + 1) = W (119896) minus Proj119882
[120574119908S (119896) 120576 (119896 + 1)] (10)
V (119896 + 1) = V (119896) minus ProjV [120574Vz119897W119879(119896) S1015840 (119905) 120576 (119896 + 1)]
(11)
where 120574119908and 120574V are the learning rates with positive constants
S(119896) = diag1199041(119896) 119904
119897(119896) with 119904
119894(119896) = 119904(V119879
119894x(119896)) and
z119897= [1radic119897 1radic119897]
119879
(z = 1) is a vector compatible with
V(119896) Since the output of the hidden layer neural network isdirectly related to the input of the outputweight so the outputweightW is introduced in (10) S1015840(119896) = diag1199041015840
1(119896) 119904
1015840
119897(119896)
is a diagonal matrix with 1199041015840
119894(119896) = 119904
1015840(V119879119894x(119896)) The projection
function Proj120579(lowast) is defined as Proj
120579(lowast) = Proj
120579(lowast119895119896)whose
element in the 119895th row and 119896th column is
Proj120579(lowast119895119896) =
minuslowast119895119896 if
120579119895119896
= 120588120579119895119896max lowast
119895119896lt 0
120579119895119896
= 120588120579119895119896min lowast
119895119896gt 0
lowast119895119896 otherwise
(12)
where lowast is either a vector or matrix with its element beinglowast119895119896 120588120579119895119896min and 120588
120579119895119896max are presumed as upper and lower
boundaries of 120579119894119895 and 120579 denotes W and V However due
to the fact that those bounds may not be known a prioricertain fictitious large enough bounds can be used [17] It isjust needed to limit the output amplitude of the output ofadaptive MNN equation (7) for example corresponding tothe power amplifier input limit plusmn10 v
The hysteresis compensation algorithm using adaptiveMNN can be summarized as follows
Step 1 Construct the input of adaptive neural network x(119896)and estimate 119894
119888(119896)
Step 2 Calculate the hysteresis compensation current 119894119888(119896)
using (8)
Step 3 Calculate the force error 120576(119896 + 1) using (9)
Step 4 Update the neural networksweight using (10) and (11)
Step 5 Let 119896 = 119896 + 1 return to Step 1
4 Simulation
Example 1 A simulation for the current-driven reluctanceactuator is conducted to verify the performance of theproposed hysteresis compensation configuration shown inFigure 7
In this simulation since the linear power amplifier hasa high bandwidth and rapid response it is ignored A forcecommand 119865
119889is imposed without a counter balance force the
I-target would be pulled to the E-core For this reason it isassumed that the I-target is fixed so that we may investigatethe force tracing performanceThe reluctance linear actuatorwith hysteresis is modeled by (5) whose parameters arechosen as in the patent [15] the maximum force is about200N the maximum gap 119909
119892between the E-core and I-target
is 04mm and the constant 119896 = 773 times 10minus6 To reproduce
a reluctance actuator model with nonsmooth hysteresis theparameter 120582
2of the hysteretic operator would have to be
infinitely large Here the hysteresis operator parameters arechosen as 120582
1= 002 and 120582
2= 10
The control objective is to make the system output 119865
follow the reference force 119865119889 A nontrivial reference force is
depicted in Figure 6 This profile is used to test the propo-sed nonlinear controller with hysteresis compensation with
Journal of Control Science and Engineering 5
0 2 4 6 8 10 12 14 160
50
100
150
200
Refe
renc
e for
ce (N
)
t (s)
Figure 6 Reference force
0 50 100 150 200
0
05
1
15
2
Reference force
Forc
e err
or (N
)
Without hysteresis compensationWith hysteresis compensation
minus2
minus15
minus1
minus05
Figure 7 The maps between the reference force and the forcetracking error
respect to higher order reversal curvesThe parameters of theadaptive MNN are determined as follows the input vector ofthe neural network is chosen as x(119896) = [119865
119889(119896+1) 119865
119889(119896) 119865(119896+
1) 119865(119896)] the number of hidden-layer neurons is 119897 = 40 theinitial neural network weighting matrices are w(0) = 0 andv(0) = 0 and the learning rate is selected as 120574
119908= 00006 and
120574V = 001 respectivelyThe maps between the reference force 119865
119889and the force
tracking error with nonlinear current control without hys-teresis compensation and with nonlinear current controlwith hysteresis compensation are shown in Figure 7 Thelargest force tracking error without hysteresis compensationis about plusmn2N With hysteresis compensation it is aboutplusmn01 N Furthermore Figure 8 shows that the ratio betweenthe output force 119865 and its reference command 119865
119889with and
without hysteresis compensator and the ratio with hysteresiscompensation is very close to 1 From the simulation resultsit is clear that the force with hysteresis compensation hasa much smaller force tracking error than without hysteresiscompensation
Example 2 In order to verify if the proposed hysteresis com-pensation method can be applied in high-precision systems
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Reference force
Out
put f
orce
Without hysteresis compensationWith hysteresis compensation
80 85 9070
80
90
100
Figure 8 Comparison of the force hysteresis loop between forcegenerations without hysteresis compensation and with hysteresiscompensation
E-core 2 I-target 2
i2F2
xg2 xg1
i1F1
Stage
x
E-core 1I-target 1
Figure 9 EI-core type actuator pairs
we do the following simulation using the reluctance actuatorto drive a one degree of freedom stage
Due to the nature of the reluctance force an EI coreactuator can only generate a unidirectional attractive forceTo generate an active force in the opposite direction asecond actuator needs to be placed on the opposite side ofthe I-target Figure 9 illustrates a simplified actuator pairsincluding electromagnetic actuators E-core 1 and E-core 2 aswell as a stage [15]The gap 119909
1198921separates the E-core 1 and the
I-target 1 and the gap1199091198922separates E-core 2 and I-target 2The
stage mass is 10 kg the position sensor resolution is 1 nm thesampling time is 05ms and the bias force is119865
0= 15Nwhich
is applied on both EI actuators The E-core electromagneticconstant is 119896 = 773times10
minus6 The gaps 1199091198921and 119909
1198922between the
E-cores 1 2 and the I-targets 1 2 are in the range of 0 120583m to400 120583m and the initial gap is 119909
1198920= 400 120583m The parameters
of hysteresis operator are set as in Example 1The stage control system uses the proportional-integral
(PI) controller to guarantee the stability of the closed-loopposition system while the nonlinear current controller with
6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 3
i
N lm
xg
E-core I-target
FF
B
Figure 2 Sketches of the EI actuator
B
H
Figure 3 Typical B-H hysteresis curve
force on the target The amount of current determinesthe amount of reluctance force The reluctance force actingon the ldquoIrdquo target is described [13] by
119865 = 119896
1198942
1199092
119892
(4)
where 119896 = 120583011987321198604 120583
0is the permeability of air 119873 is the
number of turns in coil on the center leg of the E-core and119860
is the area of the air gap It is a lumpedmodelwhich disregardsnonmodeled effects such as hysteresis leakage fringing andsaturation
However the E-core coil uses the soft magnetic materialwhich has magnetic hysteresis [14] between the magneticfield 119867 and the bulk magnetic flux density 119861 and the typical119861-119867 curve is illustrated in Figure 3 It is assumed that thehysteretic 119861-119867 curve can be modeled [4] by the parametrichysteresis operator (4) Then it can get a reluctance linearactuator model with hysteresis [8] as
119865 = 119896
[119867hys (119894 1205821 1205822)]2
1199092
119892
(5)
This model contains both the hysteresis and obvioussquare linearity between the input and output
32 Nonlinear Current Control for Reluctance Actuatorwithout Hysteresis Compensator A typical structure of thecurrent-driven reluctance linear actuator control is shown inFigure 4 Due to the unstable nature of the electromagnetic
i F
Setpoint Fd id
C Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Positionsensor
xg
minus
Figure 4 Typical current-driven reluctance actuator control loop
forces a feedback control loop is required to achieve stableperformance In Figure 4 ldquoCrdquo denotes a linear positioncontroller such as the proportional-integral-derivative (PID)controller which guarantees the stability of the closed loopThe position controller uses the position in the air gap mea-sured by a position sensor to generate the force command 119865
119889
The power amplifier supplies the current for the reluctanceactuator
From (4) a nonlinear current controller without hystere-sis compensator [15] can be obtained as
119894119889=
radic
119865119889sdot 1199092
119892
119896119889
(6)
where 119896119889is the estimate of real constant 119896
The above nonlinear current compensator does not con-sider the hysteresis in the reluctance force From the analysisof the hysteresis influence in the section of introduction it isnecessary to find a hysteresis compensation method for thereluctance linear actuator in the high-precision positioningIn the following a hysteresis compensator for the reluctancelinear actuator based on the adaptive MNNwill be proposed
33 Nonlinear Current Control for Reluctance Actuator withHysteresis Compensator In control engineering artificial NNcan be used as a universal function approximator whichinspires using NN as an emulator to approximate unknownnonlinearity Many types of neural networks have beenapplied such as the high-order neural networks (HONN)radial basis function neural networks (RBF) and multilayerneural network (MNN) For MNN its universal approx-imation ability parallel distributed processing ability andlearning and adaptation ability make it one of the mostpopular tools in nonlinear control [9]
MNN is a static feed-forward network that consists of anumber of layers each layer having a number of McCulloch-Pitts neurons Due to its hidden layers the MNN has animportant character that it can approximate any continu-ous nonlinear function Once the hidden layers have beenselected only the adjustable weights have to be determinedto specify the networks completely Owing to the aboveadvantages of MNN a nonlinear current controller withhysteresis compensator for the current-driven reluctanceactuator force using the adaptive MNN can be obtained asshown in Figure 5 The feedback force 119865 can be estimatedfrom the relation 119865 = 119898119886 with 119898 the stage mass and 119886 theactual accelerationThe actual acceleration 119886 can bemeasuredby an accelerometer or computed from the measured gap
4 Journal of Control Science and Engineering
a
Fd id idd
+ic
i
V W
+
minus120576
MNN
m
Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Adaptive laws
Hysteresis current compensator
AccelerometerF
Figure 5 Structure of hysteresis current compensator using adap-tive MNN
position 119909119892by a digital double differentiator The double
differentiation may introduce a noise However when usinga filter such as the least-square method and considering thenoise level it makes double differentiation acceptable as amethod to calculate the stage acceleration [16] In this paperthe acceleration 119886 is measured by the accelerometer Thedetails of the adaptive MNN are as follows
The nonlinear current controller with hysteresis compen-sator can be defined as
119894119889119889
(119896) = 119894119889(119896) + 119894
119888(119896) (7)
where the hysteresis current compensator in (7) is estimatedby the following MNN
119894119888(119896) = WT
(k) S (VT(k) x (k)) (8)
whereW(k) isin R119897 andV(k) isin R(119899+1)times119897 are weighting matrices119897 is the number of hidden-layer neurons x(119896) = [x119879(119896) 1]119879 isin
R119899+1 denotes the input vector of the neural network andS(V119879(119896)x(119896)) = [119904(V119879
1(119896)x(119896)) 119904(V119879
119897(119896)x(119896)) 1]119879 isin R119897
with 119904(119909) = 1(1 + 119890minus119909
)The force error is
120576 (119896 + 1) = 119865119889(119896) minus 119865 (119896) (9)
The adaptive update law of the neural network weights ischosen as
W (119896 + 1) = W (119896) minus Proj119882
[120574119908S (119896) 120576 (119896 + 1)] (10)
V (119896 + 1) = V (119896) minus ProjV [120574Vz119897W119879(119896) S1015840 (119905) 120576 (119896 + 1)]
(11)
where 120574119908and 120574V are the learning rates with positive constants
S(119896) = diag1199041(119896) 119904
119897(119896) with 119904
119894(119896) = 119904(V119879
119894x(119896)) and
z119897= [1radic119897 1radic119897]
119879
(z = 1) is a vector compatible with
V(119896) Since the output of the hidden layer neural network isdirectly related to the input of the outputweight so the outputweightW is introduced in (10) S1015840(119896) = diag1199041015840
1(119896) 119904
1015840
119897(119896)
is a diagonal matrix with 1199041015840
119894(119896) = 119904
1015840(V119879119894x(119896)) The projection
function Proj120579(lowast) is defined as Proj
120579(lowast) = Proj
120579(lowast119895119896)whose
element in the 119895th row and 119896th column is
Proj120579(lowast119895119896) =
minuslowast119895119896 if
120579119895119896
= 120588120579119895119896max lowast
119895119896lt 0
120579119895119896
= 120588120579119895119896min lowast
119895119896gt 0
lowast119895119896 otherwise
(12)
where lowast is either a vector or matrix with its element beinglowast119895119896 120588120579119895119896min and 120588
120579119895119896max are presumed as upper and lower
boundaries of 120579119894119895 and 120579 denotes W and V However due
to the fact that those bounds may not be known a prioricertain fictitious large enough bounds can be used [17] It isjust needed to limit the output amplitude of the output ofadaptive MNN equation (7) for example corresponding tothe power amplifier input limit plusmn10 v
The hysteresis compensation algorithm using adaptiveMNN can be summarized as follows
Step 1 Construct the input of adaptive neural network x(119896)and estimate 119894
119888(119896)
Step 2 Calculate the hysteresis compensation current 119894119888(119896)
using (8)
Step 3 Calculate the force error 120576(119896 + 1) using (9)
Step 4 Update the neural networksweight using (10) and (11)
Step 5 Let 119896 = 119896 + 1 return to Step 1
4 Simulation
Example 1 A simulation for the current-driven reluctanceactuator is conducted to verify the performance of theproposed hysteresis compensation configuration shown inFigure 7
In this simulation since the linear power amplifier hasa high bandwidth and rapid response it is ignored A forcecommand 119865
119889is imposed without a counter balance force the
I-target would be pulled to the E-core For this reason it isassumed that the I-target is fixed so that we may investigatethe force tracing performanceThe reluctance linear actuatorwith hysteresis is modeled by (5) whose parameters arechosen as in the patent [15] the maximum force is about200N the maximum gap 119909
119892between the E-core and I-target
is 04mm and the constant 119896 = 773 times 10minus6 To reproduce
a reluctance actuator model with nonsmooth hysteresis theparameter 120582
2of the hysteretic operator would have to be
infinitely large Here the hysteresis operator parameters arechosen as 120582
1= 002 and 120582
2= 10
The control objective is to make the system output 119865
follow the reference force 119865119889 A nontrivial reference force is
depicted in Figure 6 This profile is used to test the propo-sed nonlinear controller with hysteresis compensation with
Journal of Control Science and Engineering 5
0 2 4 6 8 10 12 14 160
50
100
150
200
Refe
renc
e for
ce (N
)
t (s)
Figure 6 Reference force
0 50 100 150 200
0
05
1
15
2
Reference force
Forc
e err
or (N
)
Without hysteresis compensationWith hysteresis compensation
minus2
minus15
minus1
minus05
Figure 7 The maps between the reference force and the forcetracking error
respect to higher order reversal curvesThe parameters of theadaptive MNN are determined as follows the input vector ofthe neural network is chosen as x(119896) = [119865
119889(119896+1) 119865
119889(119896) 119865(119896+
1) 119865(119896)] the number of hidden-layer neurons is 119897 = 40 theinitial neural network weighting matrices are w(0) = 0 andv(0) = 0 and the learning rate is selected as 120574
119908= 00006 and
120574V = 001 respectivelyThe maps between the reference force 119865
119889and the force
tracking error with nonlinear current control without hys-teresis compensation and with nonlinear current controlwith hysteresis compensation are shown in Figure 7 Thelargest force tracking error without hysteresis compensationis about plusmn2N With hysteresis compensation it is aboutplusmn01 N Furthermore Figure 8 shows that the ratio betweenthe output force 119865 and its reference command 119865
119889with and
without hysteresis compensator and the ratio with hysteresiscompensation is very close to 1 From the simulation resultsit is clear that the force with hysteresis compensation hasa much smaller force tracking error than without hysteresiscompensation
Example 2 In order to verify if the proposed hysteresis com-pensation method can be applied in high-precision systems
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Reference force
Out
put f
orce
Without hysteresis compensationWith hysteresis compensation
80 85 9070
80
90
100
Figure 8 Comparison of the force hysteresis loop between forcegenerations without hysteresis compensation and with hysteresiscompensation
E-core 2 I-target 2
i2F2
xg2 xg1
i1F1
Stage
x
E-core 1I-target 1
Figure 9 EI-core type actuator pairs
we do the following simulation using the reluctance actuatorto drive a one degree of freedom stage
Due to the nature of the reluctance force an EI coreactuator can only generate a unidirectional attractive forceTo generate an active force in the opposite direction asecond actuator needs to be placed on the opposite side ofthe I-target Figure 9 illustrates a simplified actuator pairsincluding electromagnetic actuators E-core 1 and E-core 2 aswell as a stage [15]The gap 119909
1198921separates the E-core 1 and the
I-target 1 and the gap1199091198922separates E-core 2 and I-target 2The
stage mass is 10 kg the position sensor resolution is 1 nm thesampling time is 05ms and the bias force is119865
0= 15Nwhich
is applied on both EI actuators The E-core electromagneticconstant is 119896 = 773times10
minus6 The gaps 1199091198921and 119909
1198922between the
E-cores 1 2 and the I-targets 1 2 are in the range of 0 120583m to400 120583m and the initial gap is 119909
1198920= 400 120583m The parameters
of hysteresis operator are set as in Example 1The stage control system uses the proportional-integral
(PI) controller to guarantee the stability of the closed-loopposition system while the nonlinear current controller with
6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Control Science and Engineering
a
Fd id idd
+ic
i
V W
+
minus120576
MNN
m
Nonlinearcompensator
Poweramplifier
Reluctanceactuator Mass
Adaptive laws
Hysteresis current compensator
AccelerometerF
Figure 5 Structure of hysteresis current compensator using adap-tive MNN
position 119909119892by a digital double differentiator The double
differentiation may introduce a noise However when usinga filter such as the least-square method and considering thenoise level it makes double differentiation acceptable as amethod to calculate the stage acceleration [16] In this paperthe acceleration 119886 is measured by the accelerometer Thedetails of the adaptive MNN are as follows
The nonlinear current controller with hysteresis compen-sator can be defined as
119894119889119889
(119896) = 119894119889(119896) + 119894
119888(119896) (7)
where the hysteresis current compensator in (7) is estimatedby the following MNN
119894119888(119896) = WT
(k) S (VT(k) x (k)) (8)
whereW(k) isin R119897 andV(k) isin R(119899+1)times119897 are weighting matrices119897 is the number of hidden-layer neurons x(119896) = [x119879(119896) 1]119879 isin
R119899+1 denotes the input vector of the neural network andS(V119879(119896)x(119896)) = [119904(V119879
1(119896)x(119896)) 119904(V119879
119897(119896)x(119896)) 1]119879 isin R119897
with 119904(119909) = 1(1 + 119890minus119909
)The force error is
120576 (119896 + 1) = 119865119889(119896) minus 119865 (119896) (9)
The adaptive update law of the neural network weights ischosen as
W (119896 + 1) = W (119896) minus Proj119882
[120574119908S (119896) 120576 (119896 + 1)] (10)
V (119896 + 1) = V (119896) minus ProjV [120574Vz119897W119879(119896) S1015840 (119905) 120576 (119896 + 1)]
(11)
where 120574119908and 120574V are the learning rates with positive constants
S(119896) = diag1199041(119896) 119904
119897(119896) with 119904
119894(119896) = 119904(V119879
119894x(119896)) and
z119897= [1radic119897 1radic119897]
119879
(z = 1) is a vector compatible with
V(119896) Since the output of the hidden layer neural network isdirectly related to the input of the outputweight so the outputweightW is introduced in (10) S1015840(119896) = diag1199041015840
1(119896) 119904
1015840
119897(119896)
is a diagonal matrix with 1199041015840
119894(119896) = 119904
1015840(V119879119894x(119896)) The projection
function Proj120579(lowast) is defined as Proj
120579(lowast) = Proj
120579(lowast119895119896)whose
element in the 119895th row and 119896th column is
Proj120579(lowast119895119896) =
minuslowast119895119896 if
120579119895119896
= 120588120579119895119896max lowast
119895119896lt 0
120579119895119896
= 120588120579119895119896min lowast
119895119896gt 0
lowast119895119896 otherwise
(12)
where lowast is either a vector or matrix with its element beinglowast119895119896 120588120579119895119896min and 120588
120579119895119896max are presumed as upper and lower
boundaries of 120579119894119895 and 120579 denotes W and V However due
to the fact that those bounds may not be known a prioricertain fictitious large enough bounds can be used [17] It isjust needed to limit the output amplitude of the output ofadaptive MNN equation (7) for example corresponding tothe power amplifier input limit plusmn10 v
The hysteresis compensation algorithm using adaptiveMNN can be summarized as follows
Step 1 Construct the input of adaptive neural network x(119896)and estimate 119894
119888(119896)
Step 2 Calculate the hysteresis compensation current 119894119888(119896)
using (8)
Step 3 Calculate the force error 120576(119896 + 1) using (9)
Step 4 Update the neural networksweight using (10) and (11)
Step 5 Let 119896 = 119896 + 1 return to Step 1
4 Simulation
Example 1 A simulation for the current-driven reluctanceactuator is conducted to verify the performance of theproposed hysteresis compensation configuration shown inFigure 7
In this simulation since the linear power amplifier hasa high bandwidth and rapid response it is ignored A forcecommand 119865
119889is imposed without a counter balance force the
I-target would be pulled to the E-core For this reason it isassumed that the I-target is fixed so that we may investigatethe force tracing performanceThe reluctance linear actuatorwith hysteresis is modeled by (5) whose parameters arechosen as in the patent [15] the maximum force is about200N the maximum gap 119909
119892between the E-core and I-target
is 04mm and the constant 119896 = 773 times 10minus6 To reproduce
a reluctance actuator model with nonsmooth hysteresis theparameter 120582
2of the hysteretic operator would have to be
infinitely large Here the hysteresis operator parameters arechosen as 120582
1= 002 and 120582
2= 10
The control objective is to make the system output 119865
follow the reference force 119865119889 A nontrivial reference force is
depicted in Figure 6 This profile is used to test the propo-sed nonlinear controller with hysteresis compensation with
Journal of Control Science and Engineering 5
0 2 4 6 8 10 12 14 160
50
100
150
200
Refe
renc
e for
ce (N
)
t (s)
Figure 6 Reference force
0 50 100 150 200
0
05
1
15
2
Reference force
Forc
e err
or (N
)
Without hysteresis compensationWith hysteresis compensation
minus2
minus15
minus1
minus05
Figure 7 The maps between the reference force and the forcetracking error
respect to higher order reversal curvesThe parameters of theadaptive MNN are determined as follows the input vector ofthe neural network is chosen as x(119896) = [119865
119889(119896+1) 119865
119889(119896) 119865(119896+
1) 119865(119896)] the number of hidden-layer neurons is 119897 = 40 theinitial neural network weighting matrices are w(0) = 0 andv(0) = 0 and the learning rate is selected as 120574
119908= 00006 and
120574V = 001 respectivelyThe maps between the reference force 119865
119889and the force
tracking error with nonlinear current control without hys-teresis compensation and with nonlinear current controlwith hysteresis compensation are shown in Figure 7 Thelargest force tracking error without hysteresis compensationis about plusmn2N With hysteresis compensation it is aboutplusmn01 N Furthermore Figure 8 shows that the ratio betweenthe output force 119865 and its reference command 119865
119889with and
without hysteresis compensator and the ratio with hysteresiscompensation is very close to 1 From the simulation resultsit is clear that the force with hysteresis compensation hasa much smaller force tracking error than without hysteresiscompensation
Example 2 In order to verify if the proposed hysteresis com-pensation method can be applied in high-precision systems
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Reference force
Out
put f
orce
Without hysteresis compensationWith hysteresis compensation
80 85 9070
80
90
100
Figure 8 Comparison of the force hysteresis loop between forcegenerations without hysteresis compensation and with hysteresiscompensation
E-core 2 I-target 2
i2F2
xg2 xg1
i1F1
Stage
x
E-core 1I-target 1
Figure 9 EI-core type actuator pairs
we do the following simulation using the reluctance actuatorto drive a one degree of freedom stage
Due to the nature of the reluctance force an EI coreactuator can only generate a unidirectional attractive forceTo generate an active force in the opposite direction asecond actuator needs to be placed on the opposite side ofthe I-target Figure 9 illustrates a simplified actuator pairsincluding electromagnetic actuators E-core 1 and E-core 2 aswell as a stage [15]The gap 119909
1198921separates the E-core 1 and the
I-target 1 and the gap1199091198922separates E-core 2 and I-target 2The
stage mass is 10 kg the position sensor resolution is 1 nm thesampling time is 05ms and the bias force is119865
0= 15Nwhich
is applied on both EI actuators The E-core electromagneticconstant is 119896 = 773times10
minus6 The gaps 1199091198921and 119909
1198922between the
E-cores 1 2 and the I-targets 1 2 are in the range of 0 120583m to400 120583m and the initial gap is 119909
1198920= 400 120583m The parameters
of hysteresis operator are set as in Example 1The stage control system uses the proportional-integral
(PI) controller to guarantee the stability of the closed-loopposition system while the nonlinear current controller with
6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 5
0 2 4 6 8 10 12 14 160
50
100
150
200
Refe
renc
e for
ce (N
)
t (s)
Figure 6 Reference force
0 50 100 150 200
0
05
1
15
2
Reference force
Forc
e err
or (N
)
Without hysteresis compensationWith hysteresis compensation
minus2
minus15
minus1
minus05
Figure 7 The maps between the reference force and the forcetracking error
respect to higher order reversal curvesThe parameters of theadaptive MNN are determined as follows the input vector ofthe neural network is chosen as x(119896) = [119865
119889(119896+1) 119865
119889(119896) 119865(119896+
1) 119865(119896)] the number of hidden-layer neurons is 119897 = 40 theinitial neural network weighting matrices are w(0) = 0 andv(0) = 0 and the learning rate is selected as 120574
119908= 00006 and
120574V = 001 respectivelyThe maps between the reference force 119865
119889and the force
tracking error with nonlinear current control without hys-teresis compensation and with nonlinear current controlwith hysteresis compensation are shown in Figure 7 Thelargest force tracking error without hysteresis compensationis about plusmn2N With hysteresis compensation it is aboutplusmn01 N Furthermore Figure 8 shows that the ratio betweenthe output force 119865 and its reference command 119865
119889with and
without hysteresis compensator and the ratio with hysteresiscompensation is very close to 1 From the simulation resultsit is clear that the force with hysteresis compensation hasa much smaller force tracking error than without hysteresiscompensation
Example 2 In order to verify if the proposed hysteresis com-pensation method can be applied in high-precision systems
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Reference force
Out
put f
orce
Without hysteresis compensationWith hysteresis compensation
80 85 9070
80
90
100
Figure 8 Comparison of the force hysteresis loop between forcegenerations without hysteresis compensation and with hysteresiscompensation
E-core 2 I-target 2
i2F2
xg2 xg1
i1F1
Stage
x
E-core 1I-target 1
Figure 9 EI-core type actuator pairs
we do the following simulation using the reluctance actuatorto drive a one degree of freedom stage
Due to the nature of the reluctance force an EI coreactuator can only generate a unidirectional attractive forceTo generate an active force in the opposite direction asecond actuator needs to be placed on the opposite side ofthe I-target Figure 9 illustrates a simplified actuator pairsincluding electromagnetic actuators E-core 1 and E-core 2 aswell as a stage [15]The gap 119909
1198921separates the E-core 1 and the
I-target 1 and the gap1199091198922separates E-core 2 and I-target 2The
stage mass is 10 kg the position sensor resolution is 1 nm thesampling time is 05ms and the bias force is119865
0= 15Nwhich
is applied on both EI actuators The E-core electromagneticconstant is 119896 = 773times10
minus6 The gaps 1199091198921and 119909
1198922between the
E-cores 1 2 and the I-targets 1 2 are in the range of 0 120583m to400 120583m and the initial gap is 119909
1198920= 400 120583m The parameters
of hysteresis operator are set as in Example 1The stage control system uses the proportional-integral
(PI) controller to guarantee the stability of the closed-loopposition system while the nonlinear current controller with
6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Control Science and Engineering
0
02
04
Posit
ion
(mm
)
0
5
10
Velo
city
(mm
s)
0 001 002 003 004 005 006 007 008t (s)
Figure 10 Reference position and velocity
0 001 002 003 004 005 006 007 008
0
10
20
30
Without hysteresis compensationWith hysteresis compensation
StopConstantvelocity
minus10
minus20
minus30
Trac
king
erro
r (120583
m)
t (s)
Figure 11 Comparison of the position tracking
hysteresis compensator is employed to reduce the influenceof the hysteresis and improve the performance of the closed-loop position system The stage control system is formedby a combination of Figures 6 and 7 The adaptive MNNparameters for the two EI actuators are the same as inExample 1
The control objective is to make the stage position 119909
follow the reference position Use the 3rd trajectory [18] asthe reference position profile The position and velocity areshown in Figure 10 The largest displacement is 350120583m themaximum velocity is 10mms the maximum acceleration is1ms2 and the jerk is 200ms3
The position tracking errors of control without hysteresiscompensation and with hysteresis compensation are shownin Figure 11 We define the constant velocity settling time andthe stop time as the time instants after which the positiontracking error is less than 1 120583m From the enlarged view ofthe constant velocity segment as shown in Figure 12 it can beseen that the constant velocity settling timewithout hysteresiscompensation (00198 s) is about 132 times longer than withhysteresis compensation (0015 s) and from the enlarged viewof the stop segment as shown in Figure 13 the stop time
0015 002 0025 003 0035
0015 s 00198 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 12 Comparison of the position tracking error during theconstant velocity segment
005 0055 006 0065 007 0075 008
0516 s
05945 s
0
1
2
3
4
minus2
minus3
minus4
minus1
Trac
king
erro
r (120583
m)
t (s)
Without hysteresis compensationWith hysteresis compensation
Figure 13 Comparison of the position tracking error in the stopsegment
without hysteresis compensation (05945 s) is about 11521times longer than with hysteresis compensation (0516 s)
From the simulation results of the one degree EI stageit is verified that the adaptive MNN hysteresis compensatorprovides a feasible solution to reduce the influence of reluc-tance actuator with hysteresis
5 Conclusion
This paper has proposed a nonlinear current control con-figuration with hysteresis compensator for the reluctanceactuator using the discrete-time adaptiveMNNwhich is usedas a hysteresis learning machine The proposed hysteresiscompensator compensates the current based on the desired
Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Control Science and Engineering 7
force and the actual force using the adaptive MNN Thishysteresis compensator does not need the inverse hysteresismodel Due to the simplicity of the compensation configura-tion it may have a wider range of applications Simulationresults show that the proposed methods can reduce thehysteresis influence effectively and are promising in high-precision control applications
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China under Grant 61274109
References
[1] C Grant ldquoHigh-resolution patterning a view of the futurerdquo inProceedings of the Conference of Advanced Lithography San JoseCalif USA 2012
[2] H Butler ldquoPosition control in lithographic equipmentrdquo IEEEControl Systems Magazine vol 31 no 5 pp 28ndash47 2011
[3] N H Vrijsen J W Jansen and E A Lomonova ldquoComparisonof linear voice coil and reluctance actuators for high-precisionapplicationsrdquo in Proceedings of the 14th International PowerElectronics andMotion Control Conference (EPE-PEMC rsquo10) ppS329ndashS336 Ohrid Republic of Macedonia September 2010
[4] A Katalenic J De Boeij H Butler and P P J Van DenBosch ldquoLinearization of a current-driven reluctance actuatorwith hysteresis compensationrdquo Mechatronics vol 23 no 2 pp163ndash171 2013
[5] N H Vrijsen J W Jansen and E A Lomonova ldquoForceprediction including hysteresis effects in a short-stroke reluc-tance actuator using a3d-FEM and the preisach modelrdquoAppliedMechanics and Materials vol 416-417 pp 187ndash194 2013
[6] R V Iyer and X Tan ldquoControl of hysteretic systems throughinverse compensationrdquo IEEE Control Systems Magazine vol 29no 1 pp 83ndash99 2009
[7] S Mittal and C-H Menq ldquoHysteresis compensation in elec-tromagnetic actuators through Preisach model inversionrdquoIEEEASMETransactions onMechatronics vol 5 no 4 pp 394ndash409 2000
[8] A Katalenic and J de Boeij ldquoLinearization of the reluctanceforce actuator based on the parametric hysteresis inverse and a2D splinerdquo in Proceedings of the 8th International Symposium onLinear Drives for Industry Applications (LDIA rsquo11) EindhovenThe Netherlands July 2011
[9] S S Ge J Zhang and T H Lee ldquoDirect MNN control ofcontinuous stirred tank reactor based on input-output modelrdquoin Proceedings of the 41st SICE Annual Conference (SICE rsquo02)vol 5 pp 2770ndash2775 Osaka Japan August 2002
[10] F-J Lin H-J Shieh and P-K Huang ldquoAdaptive waveletneural network control with hysteresis estimation for piezo-positioning mechanismrdquo IEEE Transactions on Neural Net-works vol 17 no 2 pp 432ndash444 2006
[11] A A Adly and S K Abd-El-Hafiz ldquoUsing neural networksin the identification of preisach-type hysteresis modelsrdquo IEEETransactions on Magnetics vol 34 no 3 pp 629ndash635 1998
[12] R M Corless G H Gonnet D E Hare D J Jeffrey and D EKnuth ldquoOn the Lambert 119882 functionrdquo Advances in Computa-tional Mathematics vol 5 no 1 pp 329ndash359 1996
[13] E P Furlani Permanent Magnet and Electromechanical DevicesMaterials Analysis and Applications Academic Press 2001
[14] G Bertotti Hysteresis in Magnetism For Physicists MaterialsScientists Academic Press 1998
[15] T C Teng and B Yuan US Patent No 6069417 US Patentand Trademark Office Washington DC USA 2000
[16] H Butler ldquoAdaptive feedforward for a wafer stage in a litho-graphic toolrdquo IEEE Transactions on Control Systems Technologyvol 21 no 3 pp 875ndash881 2013
[17] J Q Gong and B Yao ldquoAdaptive robust control withoutknowing bounds of parameter variationsrdquo in Proceedings of the38th IEEE Conference on Decision and Control pp 3334ndash3339December 1999
[18] D Roover Motion Control of a Wafer Stage Delft UniversityPress Delft The Netherlands 1997
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of