Embed Size (px)
Citation preview

Hindawi Publishing CorporationAdvances in TribologyVolume 2013 Article ID 918387 9 pageshttpdxdoiorg1011552013918387
Research ArticleMechanical Hybrid KERS Based on Toroidal Traction DrivesAn Example of Smart Tribological Design to Improve TerrestrialVehicle Performance
Francesco Bottiglione1 Giuseppe Carbone1 Leonardo De Novellis2
Luigi Mangialardi1 and Giacomo Mantriota1
1 Dipartimento di Meccanica Matematica e Management Politecnico di Bari Vle Japigia 182 70126 Bari Italy2 University of Surrey Faculty of Engineering and Physical Sciences Guildford Surrey GU2 7XH UK
Correspondence should be addressed to Giuseppe Carbone carbonepolibait
Received 4 August 2012 Accepted 15 February 2013
Academic Editor Michel Fillon
Copyright copy 2013 Francesco Bottiglione et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
We analyse in terms of efficiency and traction capabilities a recently patented traction drive referred to as the double roller full-toroidal variator (DFTV) We compare its performance with the single roller full-toroidal variator (SFTV) and the single rollerhalf-toroidal variator (SHTV) Modeling of these variators involves challenging tribological issues the traction and efficiencyperformances depend on tribological phenomena occurring at the interface between rollers and disks where the lubricantundergoes very severe elastohydrodynamic lubrication regimes Interestingly the DFTV shows an improvement of the mechanicalefficiency over a wide range of transmission ratios and in particular at the unit speed ratio as in such conditions in which the DFTVallows for zero-spin thus strongly enhancing its traction capabilitiesThevery highmechanical efficiency and traction performancesof the DFTV are exploited to investigate the performance of a flywheel-based Kinetic Energy Recovery System (KERS) wherethe efficiency of the variator plays an important role in determining the overall energy recovery performance The energy boostcapabilities and the round-trip efficiency are calculated for the three different variators considered in this studyThe results suggestthat the energy recovery potential of the mechanical KERS can be improved with a proper choice of the variator
1 Introduction
Recent developments in the automotive field are relatedto the design of drive-trains with the aim of improvingthe exploitation of the thermal engine according to therequirements of reduction of fuel consumption and pollutingemissions [1ndash3]
To achieve these targets hybrid powertrains are beingstudied and developed Among all possibilities someresearch works claim that mechanical hybrids are moreefficient and give the greatest advantages in terms ofreduction of fuel consumption and polluting emissionsSeveral investigations have been made to estimate theeffective benefits that such systems can give in mainstreamcars and trucks at the present state-of-the-art Computationalresults demonstrate that a fuel economy improvement up
to 25 can be obtained in mainstream passenger carsand trucks which can also be improved further withengine downsizing [4ndash7] Continuously variable drives arethe core of mechanical hybrids Chainbelt continuouslyvariable transmissions (CVTs) have been widely studiedeither theoretically either experimentally [8ndash10] howeverlimitations of the maximum transmittable torque and ofcontrol possibilities made the toroidal traction variators avalid alternative for the development of CVT drivetrains[11] A toroidal traction drive is made of input and outputdisks which are coupled respectively with drive and drivenshafts and shaped in such a way to realize a toroidal cavity Apower roller rotating inside the toroidal cavity is employedto transfer torque from the drive disk to the driven one bymeans of shearing action of elastohydrodynamic oil filmfurthermore the tilting of the power roller allows shifting
2 Advances in Tribology
120579120579
120579
(a) (b) (c)
119874
119874
119874
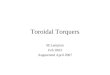
Figure 1 A schematic drawing of the three toroidal variators the single roller half-toroidal variator (SHTV) (a) the single roller full-toroidalvariator (SFTV) (b) the double roller full toroidal variator (c)
maneuvers Referring to the toroidal variators which areactually on the market for automotive applications the basicgeometric distinction is on the position of the roller tiltingcenter (point O in Figure 1) which may coincide or notwith the center of the toroidal cavity In the first case oneobtains the so called full-toroidal variator (see Figure 1(b))in the second case the half-toroidal variator is obtained (seeFigure 1(a)) In Figure 1(c) a new patented toroidal geometry[12] the so-called double roller full toroidal variator (orDFTV) is shown two counter-rotating rollers are arrangedinside the full-toroidal cavity with the aim to reduce thespin losses at the roller-disk contact also the roller conicalshape allows to balance the normal forces thus makingthe employment of a thrust roller-bearing unnecessaryIn this way the main advantages of the two single-rollertoroidal geometries (ie the SHTV and SFTV) can becombined leading to significant improvements of the overalltransmission efficiency [13 14] The ratio spread and theefficiency of the variable drives are key features for applicationtomechanical hybrid systems A compromise between a largeratio spread and a good efficiency in both forward and reverseoperationmust be found to optimize the operating conditionsof the KERS It has been shown (see [15]) that shunted CVTarchitectures ([16 17]) which enlarge the ratio spread of thevariable drive cannot improve the performance of the KERSas a consequence of a loss of efficiency in particular in reverseoperation (see also [18]) For these reasons in this paper wefocus on the performance of standard toroidal traction drivegeometries with speed ratio covering the range from 05 to 2In particular a fully flooded elastohydrodynamic-lubrication(EHL) model is presented to analyze in terms of tractionand efficiency performance a recently patented toroidaltraction drive variator (the DFTV) and compare it withmore standard solutions as the single roller full-toroidalvariator (SFTV) and the single roller half-toroidal variator(SHTV) The results are used to investigate the performanceof a flywheel-based Kinetic Energy Recovery System (KERS)where the efficiency of the variator plays an important rolein determining the overall energy recovery performance
2 Traction and Efficiency of Toroidal Drives
In this section we define the main geometric and kinematiccharacteristics of the toroidal variators In Figure 2 119903
0is the
first principal radius of the input and output disc 11990311and 11990333
are the second principal radii respectively of the input and
output discs In the case of the DFTV each power roller hasa conical part and a toroidal part the rollers are in contactalong the conical part whilst the toroidal part is shaped asa typical half-toroidal roller and it is in contact with theinput or output disc We call 119903
2the curvature radius of a
section perpendicular to the roller axis and 11990322is the second
principal radius For practical aspects it is useful to define theconformity ratio CR = 119903
221199030and the aspect ratio 119896 = e119903
0
where 119890 is the eccentricity An important control parameteris the tilting angle 120574 We can express the dimensionless diskscurvature radii formulation as a function of the cone angle 120579and of the tilting angle 120574 (see Figure 2) as 119903
11= 1199031 cos(120579 + 120574)
and 11990333= 1199033 cos(120579 minus 120574) where 119903
1= 1199030(1 + 119896 minus cos(120579 + 120574)) and
1199033= 1199030(1 + 119896 minus cos(120579 minus 120574)) From geometric relations we also
obtain 1199032= (1199030+ 119890) sin(1205722) We also define the geometric
speed ratio 119904119903ID
as the ratio of the radial coordinates 1199031and 1199032
namely 119904119903ID
= 11990311199033 Said 120596
1the input angular velocity and
1205963the rotational speed of the output disc we define the speed
ratio 119904119903as 119904119903= 12059631205961 Percentage differences of the velocities
of the sliding contact pairs are taken into account by defininginput119862
119903inand output119862
119903outcreep coefficients respectively that
is 119862119903in
= (12059611199031minus 12059621199032)12059611199031and 119862
119903out= (1205961015840
21199032minus 12059631199033)1205961015840
21199032
The roller-roller slip coefficient is defined as 119904119888= 1205961015840
21205962
where1205962and1205961015840
2are the angular velocities of the two counter-
rotating rollers The transmission ratio can be expressed as
119904119903= (1 minus 119862
119903) 119904119888119904119903ID
(1)
with (1 minus 119862119903) = (1 minus 119862
119903in)(1 minus 119862
119903out) For each roller 119894 of
the roller pair we can define the point Θ119894 which represents
the point of intersection of the tangents to the toroidal cavityat the roller-disk contact points and Ω
119894is defined as the
intersection point of the roller and disk rotation absoluteaxes The angular velocities of the roller relative to the inputand output disks 120596
21= 1205962minus 1205961and 120596
23= 1205961015840
2minus 1205963have
spin velocity components 12059621spin and 120596
23spin which can bedirected inwards or outwards By choosing a proper value ofthe cone incidence angle 120572 it is possible to have zero spinvelocities at 119904
119903ID= 1 The spin coefficients can be defined as
12059021=
12059621spin
1205961
= sin (120579 + 120574) minus (1 minus 119862119903in)
1 + 119896 minus cos (120579 + 120574)
1 + 119896
12059023=
12059623spin
1205963
= sin (120579 minus 120574) minus
1
(1 minus 119862119903out
)
1 + 119896 minus cos (120579 minus 120574)
1 + 119896
(2)
Advances in Tribology 3
Input disk
1199031
11990322
1199032
1205721199030
120574
119874
119890
1199033
11990333120579119863119879120579
Output disk
(a)
Input disk
1199031
1199032
120574
119874
119890
11990333
120579
Output disk
(b)
Figure 2 The geometry of the DFTV (a) and of the SHTV (b)
Following the same approach proposed in [13 14] let usdefine the traction coefficient 120583 = 119865
119879119865119873as the ratio between
the tangential force at the roller-disk interface 119865119879and the
normal load 119865119873
and the spin momentum coefficient 120594 =
119872119878119865119873119903 where 119872
119878is the spin momentum and 119903 the disk
radial coordinate of the contact point From the momentumequation applied to the counter-rotating rollers about eachroller axis the parameters 120583 and 120594 have been calculatedaccording to [13 14] Consider
(120583in minus 120583119888) (1 + 119896) sin(120572
2
) + 1120594in sin 120579DT minus 119905
119861= 0
(120583119888minus 120583out) (1 + 119896) sin(120572
2
) + 3120594out sin 120579DT minus 119905
119861= 0
(3)
considering that the angle 120579DT = (120587minus120572)2 (see Figure 2) andthe radial coordinates in dimensionless form namely
1=
11990311199030and 3= 11990331199030The term 119905
119861represents the dimensionless
torque losses due to roller bearings on the variator roller axeswhich have been evaluated according to the SKF technicaldocumentation [19] From the equilibrium equations of thediscs we can evaluate the effective torque coefficients at theinput and output variator side as
119905in = 120583in + 120594in sin (120579 + 120574)
119905out = 120583out minus 120594out sin (120579 minus 120574)
(4)
with 119905in = 119879in(1198981198991198651198731199031) and 119905out = 119879out(119898119899119865
1198731199033) can
be interpreted as effective torque coefficients at the inputand output variator side In the previous relations we haveconsidered the possibility to arrange 119899 set of rollers inside 119898toroidal cavities Moreover we can express the thrust forceacting in the disk axial direction 119865
119863as a function of the
normal load 119865119873and of the tilting angle 120574
F119863in
= 119899119865119873sin (120579 + 120574)
119865119863out
= 119899119865119873sin (120579 minus 120574)
(5)
The overall mechanical efficiency can be written as
120584 = 119904119888(1 minus 119862
119903)
120583out minus 120594out sin (120579 minus 120574)
120583in + 120594in sin (120579 + 120574)
(6)
A fully flooded isothermal contact model [13 14 20] hasbeen utilized to calculate the shear stresses at the interfaceof the elements in contact and thus the traction and spincoefficients
3 The Contact Model
We distinguish the contact conditions at the roller-disk inter-face where the contact area is elliptical and at the roller-rollerinterface where instead the contact area is rectangularlyshaped To study the contact between two curved profiles 119886and 119887 we define an equivalent Youngrsquos modulus1198641015840 expressedas a function of the elasticity modulus 119864 and Poissonrsquos ratio 120584of each element in contact [20]
1198641015840= 2(
1 minus 1205842
119886
119864119886
+
1 minus 1205842
119887
119864119887
)
minus1
(7)
and an equivalent curvature radius 120588eq = (1120588eq119909
+ 1120588eq119910
)minus1
with1
120588eq119909
=
1
119903119886119909
+
1
119903119887119909
(8)
1
120588eq119910
=
1
119903119886119910
minus
1
119903119887119910
(9)
where the subscript a refers to the roller and 119887 to the disk and119903119886119909
= (1199030+ 119890) tan1205722 = 119903
2 cos(1205722) 119903
119887119909
= 11990311 119903119886119910
= 11990322and
119903119887119910
= 1199030(in the case of half- and full-toroidal 119903
119886119909
= 1199030) The
equivalent radius of curvature is then defined as
1
120588eq=
1
120588eq119909
+
1
120588eq119910
(10)
In the case of roller-roller conical contact we define 119877119886119909
=
119877119887119909
= 119903119862 cos(1205722) being 119903
119862the mean rolling radius of the
conical part of the rollers whereas 119877119886119910
= 119877119887119910
= infin We canthen define the equivalent radius of curvature 119877eq
119909
as
1
119877eq119909
=
1
119877a119909
+
1
119877119887119909
(11)
4 Advances in Tribology
The results of elasto-hydrodynamic theory are employedto describe the lubrication regime on the contact area Inparticular we have considered the viscosity-pressure effectwith the Roelandrsquos formula
120578
1205780
= (
120578infin
1205780
)
1minus(1+119901119888119901)1198851
(12)
Because of the very high shear rates the lubricant shows anonlinear relation between the shear stresses 120591
119894119895and the shear
strain rates 120576119894119895 according to the common rule used in the
plasticity theory to split the shear strain along the differentdirections We write
120597V119894
120597119909119895
+
120597V119895
120597119909119894
=
120591119894119895
120591119890
Γ (120591119890) (13)
where the function Γ(120591119890) is representative of the nonlinear
behavior of the traction oil and
120591119890=
radic2
2
(120591119894119895120591119894119895)
12 (14)
is the equivalent stress By following the rheological modelproposed byBair andWiner the function Γ(120591e) takes the form
Γ (120591119890) =
120591119871
120578
ln( 1
1 minus 120591119890120591119871
) (15)
where 120591119871= 1205911198710+119886119901 is the limiting shear stressThe estimation
of the shear strain is carried out assuming that for hard-EHLconditions the pressure distribution is close to a Hertziandistribution (except for a peak close to the trailing edge ofthe contact) and considering that most part of the contactis characterized by an almost constant thickness ℎ of thelubricant film which in turn is calculated on the basis ofEHL formulas Therefore we can write
120597V119909
120597119911
+
120597V119911
120597119909
asymp
V119909
ℎ
120597V119910
120597119911
+
120597V119911
120597119910
asymp
V119910
ℎ
(16)
Recalling that the local spin-sliding motion is completelydetermined as a function of the creep slip and spin coef-ficient one is able to calculate the quantities 120583in 120583out 120594in120594out and the roller-roller traction coefficient 120583C by simplyintegrating the tangential stress over the contact area Oncethese quantities are obtained the efficiency and overalltraction performance of the variator are promptly derived(see also [13 14])
4 Simulation of KERS Behavior
In this section we employ the mechanical model of thethree toroidal traction drives to investigate the overall per-formance of a mechanical hybrid powertrain Among allthe possible configurations ofmechanical hybrid powertrains[7] a flywheel KERS connected into the vehicle propshaft
Tyres
FR
Clutch
3
3
3
44
4
5
2
1
Varia
tor
FM
FlywheelKERS
CVT
CVT
PGPS-CVT
GearboxEngine
Figure 3 A schematic picture of the driveline of the mechanicalhybrid vehicle Sections of the driveline are tagged with numbersFR is the final drive of the vehicle driveline and FM is the finalmultiplier The KERS is plugged in the vehicle propshaft througha friction clutch A second clutch (not shown in the figure) candisconnect the FM from the variable drive when the flywheel is inidle rotation
through a friction clutch (see Figure 3) is considered Thisconfiguration gives larger fuel economy improvements thanothers when it works in synergy with stop and restart system[7] The simulation has been performed via inverse dynamicsimulator of the vehicle powertrain The driving cycle isgiven as a velocity pattern and the driveline parameters arecalculated backwards with kinetic kinematic and efficiencymodels In this paper the focus is on the energy recoverypotential of the KERS and the gearbox and the engine are notincluded in the model Further investigation is needed to getthe fuel economy and CO
2emissions reduction potential of
the KERSThe driveline with KERS considered in this studyis made of wheels differential and final drive (FR) KERSdriving clutch toroidal CVT final step-up drive and high-speed rotating flywheel We define two KERS performanceindexes the KERS boost and the round-trip efficiency InSection 2 of the driveline (see Figure 3) the torque which isnecessary to drive the vehicle following the driving scheduleis called 119879nec
2 which can be positive or negativeThe quantity
1198791015840nec2
is defined which is equal to 119879nec2
only when 119879nec2
ge 0zero otherwise The torque that is actually given by the KERSin Section 2 is 119879
2 and it can be positive (reuse mode) or
negative (recovery mode) Moreover we define 11987910158402which is
equal to 1198792if 1198792ge 0 zero otherwise 11987910158401015840
2which is equal to 119879
2
if 1198792lt 0 and zero otherwise The KERS boost is defined as
KERS boost =int
119905cycle
01198791015840
21205962119889119905
int
119905cycle
01198791015840nec2
1205962119889119905
(17)
where 119905cycle is the time duration of one driving cycle and 1205962is
the angular velocity of shaft 2 The KERS boost is the energygiven by the KERS to the vehicle propshaft per cycle dividedby the energy that is needed to follow the driving scheduleper cycle and calculated in Section 2 of the driveline
Advances in Tribology 5
Table 1 Fluid properties at 119879 = 99∘C
Absolute viscosity at the atmospheric pressure 1205780= 325 times 10
minus3 Pa sViscosity-pressure index 119885
1= 085
Pressure-viscosity coefficient 120577 = 171 times 10minus8 Paminus1
Limiting shear stress at atmospheric pressure 1205911198710
= 002 times 109 Pa
Limiting shear stress constant 119886 = 0085
Pole pressure constant of Roelands viscosity model 119888119901= 196 times 10
8 PaPole viscosity of Roelands viscosity model 120578
infin= 631 times 10
minus5 Pa s
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(a)
0 002 004 006 008 01
1
119905in
09
08
07120584
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(b)
Figure 4 The DFTV variator performance The dimensionless output torque 119905out as a function of the overall creep coefficient C119903(a) and the
overall mechanical efficiency 120584 as a function of the input torque coefficient 119905in (b) for the three geometric ratios (119904119903ID
= 05 minus black curve119904119903ID
= 1minus blue curve 119904119903ID
= 2minus red curve) Calculations are shown for 119865119873= 20 kN
The round trip efficiency is calculated as
Round Trip Efficiency =int
119905cycle
01198791015840
21205962119889119905
minus int
119905cycle
011987910158401015840
21205962119889119905
(18)
The round trip efficiency is the energy actually given by theKERS into the vehicle propshaft per cycle divided by theenergy actually given by the propshaft to the KERS per cycle
5 Results
In this section we first present the main traction andefficiency performance of the three investigated toroidaltraction drives and afterwards we focus on the energyrecovery efficiency of a KERS geometry based on these kindof transmissions The fluid properties are reported in Table 1and the geometrical data of the three variators in Table 2
51 Traction Behavior of the DFTV Figure 4 shows theperformance in terms of traction and efficiency of thedouble toroidal traction drive (DFTV) Calculations havebeen carried out at constant values of the primary speed1205961
= 2000RPM and normal contact load 119865119873
= 20 kNInterestingly since the DFTV variator presents negligiblevalues of spin losses at unit ratio (blue curve in Figure 4(a))in this case the traction curve increases very fast as the creepis increased from zero However at different speed ratios
Table 2 The geometric data of the three toroid geometries
SHTV SFTV DFTVCavity radius 119903
040mm 40mm 40mm
Roller radius 1199032
346mm 40mm 187mmConformity ratio CR = 119903
221199030
08 05 08
Half-cone angle 120579 1205873 1205872 1205872
Incidence cone-angle 120572 43 degAspect ratio 119896 = 119890119903
00625 025 0286
119873∘ of cavities119898 2 2 2
119873∘ of rollers set 119899 3 3 3
119873∘ of rollers per set 119899
1199031 1 2
119904119903ID
= 05 (red curve in Figure 4(a)) and 119904119903ID
= 2 (blackcurve in Figure 4(a)) the presence of spin losses determinesa strong decrease of traction versus creep slope The linearbehavior is observed until a creep value 119862
119903= 002 is
reached where the traction curve presents a typical kneethat corresponds to the maximum achievable value of outputdimensionless torque (119905out)max asymp 0095 In Figure 4(b) weshow the variator mechanical efficiency 120584 as a function ofthe dimensionless input torque 119905in It is worth noticing thatat 119904119903ID
= 1 the efficiency takes very high values equal toabout 098 on most part of the input torque range Howeveras 119905in (and therefore 119905out) approaches its limiting value theefficiency rapidly drops because of the fast increase of the
6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Advances in Tribology
120579120579
120579
(a) (b) (c)
119874
119874
119874
Figure 1 A schematic drawing of the three toroidal variators the single roller half-toroidal variator (SHTV) (a) the single roller full-toroidalvariator (SFTV) (b) the double roller full toroidal variator (c)
maneuvers Referring to the toroidal variators which areactually on the market for automotive applications the basicgeometric distinction is on the position of the roller tiltingcenter (point O in Figure 1) which may coincide or notwith the center of the toroidal cavity In the first case oneobtains the so called full-toroidal variator (see Figure 1(b))in the second case the half-toroidal variator is obtained (seeFigure 1(a)) In Figure 1(c) a new patented toroidal geometry[12] the so-called double roller full toroidal variator (orDFTV) is shown two counter-rotating rollers are arrangedinside the full-toroidal cavity with the aim to reduce thespin losses at the roller-disk contact also the roller conicalshape allows to balance the normal forces thus makingthe employment of a thrust roller-bearing unnecessaryIn this way the main advantages of the two single-rollertoroidal geometries (ie the SHTV and SFTV) can becombined leading to significant improvements of the overalltransmission efficiency [13 14] The ratio spread and theefficiency of the variable drives are key features for applicationtomechanical hybrid systems A compromise between a largeratio spread and a good efficiency in both forward and reverseoperationmust be found to optimize the operating conditionsof the KERS It has been shown (see [15]) that shunted CVTarchitectures ([16 17]) which enlarge the ratio spread of thevariable drive cannot improve the performance of the KERSas a consequence of a loss of efficiency in particular in reverseoperation (see also [18]) For these reasons in this paper wefocus on the performance of standard toroidal traction drivegeometries with speed ratio covering the range from 05 to 2In particular a fully flooded elastohydrodynamic-lubrication(EHL) model is presented to analyze in terms of tractionand efficiency performance a recently patented toroidaltraction drive variator (the DFTV) and compare it withmore standard solutions as the single roller full-toroidalvariator (SFTV) and the single roller half-toroidal variator(SHTV) The results are used to investigate the performanceof a flywheel-based Kinetic Energy Recovery System (KERS)where the efficiency of the variator plays an important rolein determining the overall energy recovery performance
2 Traction and Efficiency of Toroidal Drives
In this section we define the main geometric and kinematiccharacteristics of the toroidal variators In Figure 2 119903
0is the
first principal radius of the input and output disc 11990311and 11990333
are the second principal radii respectively of the input and
output discs In the case of the DFTV each power roller hasa conical part and a toroidal part the rollers are in contactalong the conical part whilst the toroidal part is shaped asa typical half-toroidal roller and it is in contact with theinput or output disc We call 119903
2the curvature radius of a
section perpendicular to the roller axis and 11990322is the second
principal radius For practical aspects it is useful to define theconformity ratio CR = 119903
221199030and the aspect ratio 119896 = e119903
0
where 119890 is the eccentricity An important control parameteris the tilting angle 120574 We can express the dimensionless diskscurvature radii formulation as a function of the cone angle 120579and of the tilting angle 120574 (see Figure 2) as 119903
11= 1199031 cos(120579 + 120574)
and 11990333= 1199033 cos(120579 minus 120574) where 119903
1= 1199030(1 + 119896 minus cos(120579 + 120574)) and
1199033= 1199030(1 + 119896 minus cos(120579 minus 120574)) From geometric relations we also
obtain 1199032= (1199030+ 119890) sin(1205722) We also define the geometric
speed ratio 119904119903ID
as the ratio of the radial coordinates 1199031and 1199032
namely 119904119903ID
= 11990311199033 Said 120596
1the input angular velocity and
1205963the rotational speed of the output disc we define the speed
ratio 119904119903as 119904119903= 12059631205961 Percentage differences of the velocities
of the sliding contact pairs are taken into account by defininginput119862
119903inand output119862
119903outcreep coefficients respectively that
is 119862119903in
= (12059611199031minus 12059621199032)12059611199031and 119862
119903out= (1205961015840
21199032minus 12059631199033)1205961015840
21199032
The roller-roller slip coefficient is defined as 119904119888= 1205961015840
21205962
where1205962and1205961015840
2are the angular velocities of the two counter-
rotating rollers The transmission ratio can be expressed as
119904119903= (1 minus 119862
119903) 119904119888119904119903ID
(1)
with (1 minus 119862119903) = (1 minus 119862
119903in)(1 minus 119862
119903out) For each roller 119894 of
the roller pair we can define the point Θ119894 which represents
the point of intersection of the tangents to the toroidal cavityat the roller-disk contact points and Ω
119894is defined as the
intersection point of the roller and disk rotation absoluteaxes The angular velocities of the roller relative to the inputand output disks 120596
21= 1205962minus 1205961and 120596
23= 1205961015840
2minus 1205963have
spin velocity components 12059621spin and 120596
23spin which can bedirected inwards or outwards By choosing a proper value ofthe cone incidence angle 120572 it is possible to have zero spinvelocities at 119904
119903ID= 1 The spin coefficients can be defined as
12059021=
12059621spin
1205961
= sin (120579 + 120574) minus (1 minus 119862119903in)
1 + 119896 minus cos (120579 + 120574)
1 + 119896
12059023=
12059623spin
1205963
= sin (120579 minus 120574) minus
1
(1 minus 119862119903out
)
1 + 119896 minus cos (120579 minus 120574)
1 + 119896
(2)
Advances in Tribology 3
Input disk
1199031
11990322
1199032
1205721199030
120574
119874
119890
1199033
11990333120579119863119879120579
Output disk
(a)
Input disk
1199031
1199032
120574
119874
119890
11990333
120579
Output disk
(b)
Figure 2 The geometry of the DFTV (a) and of the SHTV (b)
Following the same approach proposed in [13 14] let usdefine the traction coefficient 120583 = 119865
119879119865119873as the ratio between
the tangential force at the roller-disk interface 119865119879and the
normal load 119865119873
and the spin momentum coefficient 120594 =
119872119878119865119873119903 where 119872
119878is the spin momentum and 119903 the disk
radial coordinate of the contact point From the momentumequation applied to the counter-rotating rollers about eachroller axis the parameters 120583 and 120594 have been calculatedaccording to [13 14] Consider
(120583in minus 120583119888) (1 + 119896) sin(120572
2
) + 1120594in sin 120579DT minus 119905
119861= 0
(120583119888minus 120583out) (1 + 119896) sin(120572
2
) + 3120594out sin 120579DT minus 119905
119861= 0
(3)
considering that the angle 120579DT = (120587minus120572)2 (see Figure 2) andthe radial coordinates in dimensionless form namely
1=
11990311199030and 3= 11990331199030The term 119905
119861represents the dimensionless
torque losses due to roller bearings on the variator roller axeswhich have been evaluated according to the SKF technicaldocumentation [19] From the equilibrium equations of thediscs we can evaluate the effective torque coefficients at theinput and output variator side as
119905in = 120583in + 120594in sin (120579 + 120574)
119905out = 120583out minus 120594out sin (120579 minus 120574)
(4)
with 119905in = 119879in(1198981198991198651198731199031) and 119905out = 119879out(119898119899119865
1198731199033) can
be interpreted as effective torque coefficients at the inputand output variator side In the previous relations we haveconsidered the possibility to arrange 119899 set of rollers inside 119898toroidal cavities Moreover we can express the thrust forceacting in the disk axial direction 119865
119863as a function of the
normal load 119865119873and of the tilting angle 120574
F119863in
= 119899119865119873sin (120579 + 120574)
119865119863out
= 119899119865119873sin (120579 minus 120574)
(5)
The overall mechanical efficiency can be written as
120584 = 119904119888(1 minus 119862
119903)
120583out minus 120594out sin (120579 minus 120574)
120583in + 120594in sin (120579 + 120574)
(6)
A fully flooded isothermal contact model [13 14 20] hasbeen utilized to calculate the shear stresses at the interfaceof the elements in contact and thus the traction and spincoefficients
3 The Contact Model
We distinguish the contact conditions at the roller-disk inter-face where the contact area is elliptical and at the roller-rollerinterface where instead the contact area is rectangularlyshaped To study the contact between two curved profiles 119886and 119887 we define an equivalent Youngrsquos modulus1198641015840 expressedas a function of the elasticity modulus 119864 and Poissonrsquos ratio 120584of each element in contact [20]
1198641015840= 2(
1 minus 1205842
119886
119864119886
+
1 minus 1205842
119887
119864119887
)
minus1
(7)
and an equivalent curvature radius 120588eq = (1120588eq119909
+ 1120588eq119910
)minus1
with1
120588eq119909
=
1
119903119886119909
+
1
119903119887119909
(8)
1
120588eq119910
=
1
119903119886119910
minus
1
119903119887119910
(9)
where the subscript a refers to the roller and 119887 to the disk and119903119886119909
= (1199030+ 119890) tan1205722 = 119903
2 cos(1205722) 119903
119887119909
= 11990311 119903119886119910
= 11990322and
119903119887119910
= 1199030(in the case of half- and full-toroidal 119903
119886119909
= 1199030) The
equivalent radius of curvature is then defined as
1
120588eq=
1
120588eq119909
+
1
120588eq119910
(10)
In the case of roller-roller conical contact we define 119877119886119909
=
119877119887119909
= 119903119862 cos(1205722) being 119903
119862the mean rolling radius of the
conical part of the rollers whereas 119877119886119910
= 119877119887119910
= infin We canthen define the equivalent radius of curvature 119877eq
119909
as
1
119877eq119909
=
1
119877a119909
+
1
119877119887119909
(11)
4 Advances in Tribology
The results of elasto-hydrodynamic theory are employedto describe the lubrication regime on the contact area Inparticular we have considered the viscosity-pressure effectwith the Roelandrsquos formula
120578
1205780
= (
120578infin
1205780
)
1minus(1+119901119888119901)1198851
(12)
Because of the very high shear rates the lubricant shows anonlinear relation between the shear stresses 120591
119894119895and the shear
strain rates 120576119894119895 according to the common rule used in the
plasticity theory to split the shear strain along the differentdirections We write
120597V119894
120597119909119895
+
120597V119895
120597119909119894
=
120591119894119895
120591119890
Γ (120591119890) (13)
where the function Γ(120591119890) is representative of the nonlinear
behavior of the traction oil and
120591119890=
radic2
2
(120591119894119895120591119894119895)
12 (14)
is the equivalent stress By following the rheological modelproposed byBair andWiner the function Γ(120591e) takes the form
Γ (120591119890) =
120591119871
120578
ln( 1
1 minus 120591119890120591119871
) (15)
where 120591119871= 1205911198710+119886119901 is the limiting shear stressThe estimation
of the shear strain is carried out assuming that for hard-EHLconditions the pressure distribution is close to a Hertziandistribution (except for a peak close to the trailing edge ofthe contact) and considering that most part of the contactis characterized by an almost constant thickness ℎ of thelubricant film which in turn is calculated on the basis ofEHL formulas Therefore we can write
120597V119909
120597119911
+
120597V119911
120597119909
asymp
V119909
ℎ
120597V119910
120597119911
+
120597V119911
120597119910
asymp
V119910
ℎ
(16)
Recalling that the local spin-sliding motion is completelydetermined as a function of the creep slip and spin coef-ficient one is able to calculate the quantities 120583in 120583out 120594in120594out and the roller-roller traction coefficient 120583C by simplyintegrating the tangential stress over the contact area Oncethese quantities are obtained the efficiency and overalltraction performance of the variator are promptly derived(see also [13 14])
4 Simulation of KERS Behavior
In this section we employ the mechanical model of thethree toroidal traction drives to investigate the overall per-formance of a mechanical hybrid powertrain Among allthe possible configurations ofmechanical hybrid powertrains[7] a flywheel KERS connected into the vehicle propshaft
Tyres
FR
Clutch
3
3
3
44
4
5
2
1
Varia
tor
FM
FlywheelKERS
CVT
CVT
PGPS-CVT
GearboxEngine
Figure 3 A schematic picture of the driveline of the mechanicalhybrid vehicle Sections of the driveline are tagged with numbersFR is the final drive of the vehicle driveline and FM is the finalmultiplier The KERS is plugged in the vehicle propshaft througha friction clutch A second clutch (not shown in the figure) candisconnect the FM from the variable drive when the flywheel is inidle rotation
through a friction clutch (see Figure 3) is considered Thisconfiguration gives larger fuel economy improvements thanothers when it works in synergy with stop and restart system[7] The simulation has been performed via inverse dynamicsimulator of the vehicle powertrain The driving cycle isgiven as a velocity pattern and the driveline parameters arecalculated backwards with kinetic kinematic and efficiencymodels In this paper the focus is on the energy recoverypotential of the KERS and the gearbox and the engine are notincluded in the model Further investigation is needed to getthe fuel economy and CO
2emissions reduction potential of
the KERSThe driveline with KERS considered in this studyis made of wheels differential and final drive (FR) KERSdriving clutch toroidal CVT final step-up drive and high-speed rotating flywheel We define two KERS performanceindexes the KERS boost and the round-trip efficiency InSection 2 of the driveline (see Figure 3) the torque which isnecessary to drive the vehicle following the driving scheduleis called 119879nec
2 which can be positive or negativeThe quantity
1198791015840nec2
is defined which is equal to 119879nec2
only when 119879nec2
ge 0zero otherwise The torque that is actually given by the KERSin Section 2 is 119879
2 and it can be positive (reuse mode) or
negative (recovery mode) Moreover we define 11987910158402which is
equal to 1198792if 1198792ge 0 zero otherwise 11987910158401015840
2which is equal to 119879
2
if 1198792lt 0 and zero otherwise The KERS boost is defined as
KERS boost =int
119905cycle
01198791015840
21205962119889119905
int
119905cycle
01198791015840nec2
1205962119889119905
(17)
where 119905cycle is the time duration of one driving cycle and 1205962is
the angular velocity of shaft 2 The KERS boost is the energygiven by the KERS to the vehicle propshaft per cycle dividedby the energy that is needed to follow the driving scheduleper cycle and calculated in Section 2 of the driveline
Advances in Tribology 5
Table 1 Fluid properties at 119879 = 99∘C
Absolute viscosity at the atmospheric pressure 1205780= 325 times 10
minus3 Pa sViscosity-pressure index 119885
1= 085
Pressure-viscosity coefficient 120577 = 171 times 10minus8 Paminus1
Limiting shear stress at atmospheric pressure 1205911198710
= 002 times 109 Pa
Limiting shear stress constant 119886 = 0085
Pole pressure constant of Roelands viscosity model 119888119901= 196 times 10
8 PaPole viscosity of Roelands viscosity model 120578
infin= 631 times 10
minus5 Pa s
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(a)
0 002 004 006 008 01
1
119905in
09
08
07120584
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(b)
Figure 4 The DFTV variator performance The dimensionless output torque 119905out as a function of the overall creep coefficient C119903(a) and the
overall mechanical efficiency 120584 as a function of the input torque coefficient 119905in (b) for the three geometric ratios (119904119903ID
= 05 minus black curve119904119903ID
= 1minus blue curve 119904119903ID
= 2minus red curve) Calculations are shown for 119865119873= 20 kN
The round trip efficiency is calculated as
Round Trip Efficiency =int
119905cycle
01198791015840
21205962119889119905
minus int
119905cycle
011987910158401015840
21205962119889119905
(18)
The round trip efficiency is the energy actually given by theKERS into the vehicle propshaft per cycle divided by theenergy actually given by the propshaft to the KERS per cycle
5 Results
In this section we first present the main traction andefficiency performance of the three investigated toroidaltraction drives and afterwards we focus on the energyrecovery efficiency of a KERS geometry based on these kindof transmissions The fluid properties are reported in Table 1and the geometrical data of the three variators in Table 2
51 Traction Behavior of the DFTV Figure 4 shows theperformance in terms of traction and efficiency of thedouble toroidal traction drive (DFTV) Calculations havebeen carried out at constant values of the primary speed1205961
= 2000RPM and normal contact load 119865119873
= 20 kNInterestingly since the DFTV variator presents negligiblevalues of spin losses at unit ratio (blue curve in Figure 4(a))in this case the traction curve increases very fast as the creepis increased from zero However at different speed ratios
Table 2 The geometric data of the three toroid geometries
SHTV SFTV DFTVCavity radius 119903
040mm 40mm 40mm
Roller radius 1199032
346mm 40mm 187mmConformity ratio CR = 119903
221199030
08 05 08
Half-cone angle 120579 1205873 1205872 1205872
Incidence cone-angle 120572 43 degAspect ratio 119896 = 119890119903
00625 025 0286
119873∘ of cavities119898 2 2 2
119873∘ of rollers set 119899 3 3 3
119873∘ of rollers per set 119899
1199031 1 2
119904119903ID
= 05 (red curve in Figure 4(a)) and 119904119903ID
= 2 (blackcurve in Figure 4(a)) the presence of spin losses determinesa strong decrease of traction versus creep slope The linearbehavior is observed until a creep value 119862
119903= 002 is
reached where the traction curve presents a typical kneethat corresponds to the maximum achievable value of outputdimensionless torque (119905out)max asymp 0095 In Figure 4(b) weshow the variator mechanical efficiency 120584 as a function ofthe dimensionless input torque 119905in It is worth noticing thatat 119904119903ID
= 1 the efficiency takes very high values equal toabout 098 on most part of the input torque range Howeveras 119905in (and therefore 119905out) approaches its limiting value theefficiency rapidly drops because of the fast increase of the
6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Advances in Tribology 3
Input disk
1199031
11990322
1199032
1205721199030
120574
119874
119890
1199033
11990333120579119863119879120579
Output disk
(a)
Input disk
1199031
1199032
120574
119874
119890
11990333
120579
Output disk
(b)
Figure 2 The geometry of the DFTV (a) and of the SHTV (b)
Following the same approach proposed in [13 14] let usdefine the traction coefficient 120583 = 119865
119879119865119873as the ratio between
the tangential force at the roller-disk interface 119865119879and the
normal load 119865119873
and the spin momentum coefficient 120594 =
119872119878119865119873119903 where 119872
119878is the spin momentum and 119903 the disk
radial coordinate of the contact point From the momentumequation applied to the counter-rotating rollers about eachroller axis the parameters 120583 and 120594 have been calculatedaccording to [13 14] Consider
(120583in minus 120583119888) (1 + 119896) sin(120572
2
) + 1120594in sin 120579DT minus 119905
119861= 0
(120583119888minus 120583out) (1 + 119896) sin(120572
2
) + 3120594out sin 120579DT minus 119905
119861= 0
(3)
considering that the angle 120579DT = (120587minus120572)2 (see Figure 2) andthe radial coordinates in dimensionless form namely
1=
11990311199030and 3= 11990331199030The term 119905
119861represents the dimensionless
torque losses due to roller bearings on the variator roller axeswhich have been evaluated according to the SKF technicaldocumentation [19] From the equilibrium equations of thediscs we can evaluate the effective torque coefficients at theinput and output variator side as
119905in = 120583in + 120594in sin (120579 + 120574)
119905out = 120583out minus 120594out sin (120579 minus 120574)
(4)
with 119905in = 119879in(1198981198991198651198731199031) and 119905out = 119879out(119898119899119865
1198731199033) can
be interpreted as effective torque coefficients at the inputand output variator side In the previous relations we haveconsidered the possibility to arrange 119899 set of rollers inside 119898toroidal cavities Moreover we can express the thrust forceacting in the disk axial direction 119865
119863as a function of the
normal load 119865119873and of the tilting angle 120574
F119863in
= 119899119865119873sin (120579 + 120574)
119865119863out
= 119899119865119873sin (120579 minus 120574)
(5)
The overall mechanical efficiency can be written as
120584 = 119904119888(1 minus 119862
119903)
120583out minus 120594out sin (120579 minus 120574)
120583in + 120594in sin (120579 + 120574)
(6)
A fully flooded isothermal contact model [13 14 20] hasbeen utilized to calculate the shear stresses at the interfaceof the elements in contact and thus the traction and spincoefficients
3 The Contact Model
We distinguish the contact conditions at the roller-disk inter-face where the contact area is elliptical and at the roller-rollerinterface where instead the contact area is rectangularlyshaped To study the contact between two curved profiles 119886and 119887 we define an equivalent Youngrsquos modulus1198641015840 expressedas a function of the elasticity modulus 119864 and Poissonrsquos ratio 120584of each element in contact [20]
1198641015840= 2(
1 minus 1205842
119886
119864119886
+
1 minus 1205842
119887
119864119887
)
minus1
(7)
and an equivalent curvature radius 120588eq = (1120588eq119909
+ 1120588eq119910
)minus1
with1
120588eq119909
=
1
119903119886119909
+
1
119903119887119909
(8)
1
120588eq119910
=
1
119903119886119910
minus
1
119903119887119910
(9)
where the subscript a refers to the roller and 119887 to the disk and119903119886119909
= (1199030+ 119890) tan1205722 = 119903
2 cos(1205722) 119903
119887119909
= 11990311 119903119886119910
= 11990322and
119903119887119910
= 1199030(in the case of half- and full-toroidal 119903
119886119909
= 1199030) The
equivalent radius of curvature is then defined as
1
120588eq=
1
120588eq119909
+
1
120588eq119910
(10)
In the case of roller-roller conical contact we define 119877119886119909
=
119877119887119909
= 119903119862 cos(1205722) being 119903
119862the mean rolling radius of the
conical part of the rollers whereas 119877119886119910
= 119877119887119910
= infin We canthen define the equivalent radius of curvature 119877eq
119909
as
1
119877eq119909
=
1
119877a119909
+
1
119877119887119909
(11)
4 Advances in Tribology
The results of elasto-hydrodynamic theory are employedto describe the lubrication regime on the contact area Inparticular we have considered the viscosity-pressure effectwith the Roelandrsquos formula
120578
1205780
= (
120578infin
1205780
)
1minus(1+119901119888119901)1198851
(12)
Because of the very high shear rates the lubricant shows anonlinear relation between the shear stresses 120591
119894119895and the shear
strain rates 120576119894119895 according to the common rule used in the
plasticity theory to split the shear strain along the differentdirections We write
120597V119894
120597119909119895
+
120597V119895
120597119909119894
=
120591119894119895
120591119890
Γ (120591119890) (13)
where the function Γ(120591119890) is representative of the nonlinear
behavior of the traction oil and
120591119890=
radic2
2
(120591119894119895120591119894119895)
12 (14)
is the equivalent stress By following the rheological modelproposed byBair andWiner the function Γ(120591e) takes the form
Γ (120591119890) =
120591119871
120578
ln( 1
1 minus 120591119890120591119871
) (15)
where 120591119871= 1205911198710+119886119901 is the limiting shear stressThe estimation
of the shear strain is carried out assuming that for hard-EHLconditions the pressure distribution is close to a Hertziandistribution (except for a peak close to the trailing edge ofthe contact) and considering that most part of the contactis characterized by an almost constant thickness ℎ of thelubricant film which in turn is calculated on the basis ofEHL formulas Therefore we can write
120597V119909
120597119911
+
120597V119911
120597119909
asymp
V119909
ℎ
120597V119910
120597119911
+
120597V119911
120597119910
asymp
V119910
ℎ
(16)
Recalling that the local spin-sliding motion is completelydetermined as a function of the creep slip and spin coef-ficient one is able to calculate the quantities 120583in 120583out 120594in120594out and the roller-roller traction coefficient 120583C by simplyintegrating the tangential stress over the contact area Oncethese quantities are obtained the efficiency and overalltraction performance of the variator are promptly derived(see also [13 14])
4 Simulation of KERS Behavior
In this section we employ the mechanical model of thethree toroidal traction drives to investigate the overall per-formance of a mechanical hybrid powertrain Among allthe possible configurations ofmechanical hybrid powertrains[7] a flywheel KERS connected into the vehicle propshaft
Tyres
FR
Clutch
3
3
3
44
4
5
2
1
Varia
tor
FM
FlywheelKERS
CVT
CVT
PGPS-CVT
GearboxEngine
Figure 3 A schematic picture of the driveline of the mechanicalhybrid vehicle Sections of the driveline are tagged with numbersFR is the final drive of the vehicle driveline and FM is the finalmultiplier The KERS is plugged in the vehicle propshaft througha friction clutch A second clutch (not shown in the figure) candisconnect the FM from the variable drive when the flywheel is inidle rotation
through a friction clutch (see Figure 3) is considered Thisconfiguration gives larger fuel economy improvements thanothers when it works in synergy with stop and restart system[7] The simulation has been performed via inverse dynamicsimulator of the vehicle powertrain The driving cycle isgiven as a velocity pattern and the driveline parameters arecalculated backwards with kinetic kinematic and efficiencymodels In this paper the focus is on the energy recoverypotential of the KERS and the gearbox and the engine are notincluded in the model Further investigation is needed to getthe fuel economy and CO
2emissions reduction potential of
the KERSThe driveline with KERS considered in this studyis made of wheels differential and final drive (FR) KERSdriving clutch toroidal CVT final step-up drive and high-speed rotating flywheel We define two KERS performanceindexes the KERS boost and the round-trip efficiency InSection 2 of the driveline (see Figure 3) the torque which isnecessary to drive the vehicle following the driving scheduleis called 119879nec
2 which can be positive or negativeThe quantity
1198791015840nec2
is defined which is equal to 119879nec2
only when 119879nec2
ge 0zero otherwise The torque that is actually given by the KERSin Section 2 is 119879
2 and it can be positive (reuse mode) or
negative (recovery mode) Moreover we define 11987910158402which is
equal to 1198792if 1198792ge 0 zero otherwise 11987910158401015840
2which is equal to 119879
2
if 1198792lt 0 and zero otherwise The KERS boost is defined as
KERS boost =int
119905cycle
01198791015840
21205962119889119905
int
119905cycle
01198791015840nec2
1205962119889119905
(17)
where 119905cycle is the time duration of one driving cycle and 1205962is
the angular velocity of shaft 2 The KERS boost is the energygiven by the KERS to the vehicle propshaft per cycle dividedby the energy that is needed to follow the driving scheduleper cycle and calculated in Section 2 of the driveline
Advances in Tribology 5
Table 1 Fluid properties at 119879 = 99∘C
Absolute viscosity at the atmospheric pressure 1205780= 325 times 10
minus3 Pa sViscosity-pressure index 119885
1= 085
Pressure-viscosity coefficient 120577 = 171 times 10minus8 Paminus1
Limiting shear stress at atmospheric pressure 1205911198710
= 002 times 109 Pa
Limiting shear stress constant 119886 = 0085
Pole pressure constant of Roelands viscosity model 119888119901= 196 times 10
8 PaPole viscosity of Roelands viscosity model 120578
infin= 631 times 10
minus5 Pa s
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(a)
0 002 004 006 008 01
1
119905in
09
08
07120584
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(b)
Figure 4 The DFTV variator performance The dimensionless output torque 119905out as a function of the overall creep coefficient C119903(a) and the
overall mechanical efficiency 120584 as a function of the input torque coefficient 119905in (b) for the three geometric ratios (119904119903ID
= 05 minus black curve119904119903ID
= 1minus blue curve 119904119903ID
= 2minus red curve) Calculations are shown for 119865119873= 20 kN
The round trip efficiency is calculated as
Round Trip Efficiency =int
119905cycle
01198791015840
21205962119889119905
minus int
119905cycle
011987910158401015840
21205962119889119905
(18)
The round trip efficiency is the energy actually given by theKERS into the vehicle propshaft per cycle divided by theenergy actually given by the propshaft to the KERS per cycle
5 Results
In this section we first present the main traction andefficiency performance of the three investigated toroidaltraction drives and afterwards we focus on the energyrecovery efficiency of a KERS geometry based on these kindof transmissions The fluid properties are reported in Table 1and the geometrical data of the three variators in Table 2
51 Traction Behavior of the DFTV Figure 4 shows theperformance in terms of traction and efficiency of thedouble toroidal traction drive (DFTV) Calculations havebeen carried out at constant values of the primary speed1205961
= 2000RPM and normal contact load 119865119873
= 20 kNInterestingly since the DFTV variator presents negligiblevalues of spin losses at unit ratio (blue curve in Figure 4(a))in this case the traction curve increases very fast as the creepis increased from zero However at different speed ratios
Table 2 The geometric data of the three toroid geometries
SHTV SFTV DFTVCavity radius 119903
040mm 40mm 40mm
Roller radius 1199032
346mm 40mm 187mmConformity ratio CR = 119903
221199030
08 05 08
Half-cone angle 120579 1205873 1205872 1205872
Incidence cone-angle 120572 43 degAspect ratio 119896 = 119890119903
00625 025 0286
119873∘ of cavities119898 2 2 2
119873∘ of rollers set 119899 3 3 3
119873∘ of rollers per set 119899
1199031 1 2
119904119903ID
= 05 (red curve in Figure 4(a)) and 119904119903ID
= 2 (blackcurve in Figure 4(a)) the presence of spin losses determinesa strong decrease of traction versus creep slope The linearbehavior is observed until a creep value 119862
119903= 002 is
reached where the traction curve presents a typical kneethat corresponds to the maximum achievable value of outputdimensionless torque (119905out)max asymp 0095 In Figure 4(b) weshow the variator mechanical efficiency 120584 as a function ofthe dimensionless input torque 119905in It is worth noticing thatat 119904119903ID
= 1 the efficiency takes very high values equal toabout 098 on most part of the input torque range Howeveras 119905in (and therefore 119905out) approaches its limiting value theefficiency rapidly drops because of the fast increase of the
6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Advances in Tribology
The results of elasto-hydrodynamic theory are employedto describe the lubrication regime on the contact area Inparticular we have considered the viscosity-pressure effectwith the Roelandrsquos formula
120578
1205780
= (
120578infin
1205780
)
1minus(1+119901119888119901)1198851
(12)
Because of the very high shear rates the lubricant shows anonlinear relation between the shear stresses 120591
119894119895and the shear
strain rates 120576119894119895 according to the common rule used in the
plasticity theory to split the shear strain along the differentdirections We write
120597V119894
120597119909119895
+
120597V119895
120597119909119894
=
120591119894119895
120591119890
Γ (120591119890) (13)
where the function Γ(120591119890) is representative of the nonlinear
behavior of the traction oil and
120591119890=
radic2
2
(120591119894119895120591119894119895)
12 (14)
is the equivalent stress By following the rheological modelproposed byBair andWiner the function Γ(120591e) takes the form
Γ (120591119890) =
120591119871
120578
ln( 1
1 minus 120591119890120591119871
) (15)
where 120591119871= 1205911198710+119886119901 is the limiting shear stressThe estimation
of the shear strain is carried out assuming that for hard-EHLconditions the pressure distribution is close to a Hertziandistribution (except for a peak close to the trailing edge ofthe contact) and considering that most part of the contactis characterized by an almost constant thickness ℎ of thelubricant film which in turn is calculated on the basis ofEHL formulas Therefore we can write
120597V119909
120597119911
+
120597V119911
120597119909
asymp
V119909
ℎ
120597V119910
120597119911
+
120597V119911
120597119910
asymp
V119910
ℎ
(16)
Recalling that the local spin-sliding motion is completelydetermined as a function of the creep slip and spin coef-ficient one is able to calculate the quantities 120583in 120583out 120594in120594out and the roller-roller traction coefficient 120583C by simplyintegrating the tangential stress over the contact area Oncethese quantities are obtained the efficiency and overalltraction performance of the variator are promptly derived(see also [13 14])
4 Simulation of KERS Behavior
In this section we employ the mechanical model of thethree toroidal traction drives to investigate the overall per-formance of a mechanical hybrid powertrain Among allthe possible configurations ofmechanical hybrid powertrains[7] a flywheel KERS connected into the vehicle propshaft
Tyres
FR
Clutch
3
3
3
44
4
5
2
1
Varia
tor
FM
FlywheelKERS
CVT
CVT
PGPS-CVT
GearboxEngine
Figure 3 A schematic picture of the driveline of the mechanicalhybrid vehicle Sections of the driveline are tagged with numbersFR is the final drive of the vehicle driveline and FM is the finalmultiplier The KERS is plugged in the vehicle propshaft througha friction clutch A second clutch (not shown in the figure) candisconnect the FM from the variable drive when the flywheel is inidle rotation
through a friction clutch (see Figure 3) is considered Thisconfiguration gives larger fuel economy improvements thanothers when it works in synergy with stop and restart system[7] The simulation has been performed via inverse dynamicsimulator of the vehicle powertrain The driving cycle isgiven as a velocity pattern and the driveline parameters arecalculated backwards with kinetic kinematic and efficiencymodels In this paper the focus is on the energy recoverypotential of the KERS and the gearbox and the engine are notincluded in the model Further investigation is needed to getthe fuel economy and CO
2emissions reduction potential of
the KERSThe driveline with KERS considered in this studyis made of wheels differential and final drive (FR) KERSdriving clutch toroidal CVT final step-up drive and high-speed rotating flywheel We define two KERS performanceindexes the KERS boost and the round-trip efficiency InSection 2 of the driveline (see Figure 3) the torque which isnecessary to drive the vehicle following the driving scheduleis called 119879nec
2 which can be positive or negativeThe quantity
1198791015840nec2
is defined which is equal to 119879nec2
only when 119879nec2
ge 0zero otherwise The torque that is actually given by the KERSin Section 2 is 119879
2 and it can be positive (reuse mode) or
negative (recovery mode) Moreover we define 11987910158402which is
equal to 1198792if 1198792ge 0 zero otherwise 11987910158401015840
2which is equal to 119879
2
if 1198792lt 0 and zero otherwise The KERS boost is defined as
KERS boost =int
119905cycle
01198791015840
21205962119889119905
int
119905cycle
01198791015840nec2
1205962119889119905
(17)
where 119905cycle is the time duration of one driving cycle and 1205962is
the angular velocity of shaft 2 The KERS boost is the energygiven by the KERS to the vehicle propshaft per cycle dividedby the energy that is needed to follow the driving scheduleper cycle and calculated in Section 2 of the driveline
Advances in Tribology 5
Table 1 Fluid properties at 119879 = 99∘C
Absolute viscosity at the atmospheric pressure 1205780= 325 times 10
minus3 Pa sViscosity-pressure index 119885
1= 085
Pressure-viscosity coefficient 120577 = 171 times 10minus8 Paminus1
Limiting shear stress at atmospheric pressure 1205911198710
= 002 times 109 Pa
Limiting shear stress constant 119886 = 0085
Pole pressure constant of Roelands viscosity model 119888119901= 196 times 10
8 PaPole viscosity of Roelands viscosity model 120578
infin= 631 times 10
minus5 Pa s
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(a)
0 002 004 006 008 01
1
119905in
09
08
07120584
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(b)
Figure 4 The DFTV variator performance The dimensionless output torque 119905out as a function of the overall creep coefficient C119903(a) and the
overall mechanical efficiency 120584 as a function of the input torque coefficient 119905in (b) for the three geometric ratios (119904119903ID
= 05 minus black curve119904119903ID
= 1minus blue curve 119904119903ID
= 2minus red curve) Calculations are shown for 119865119873= 20 kN
The round trip efficiency is calculated as
Round Trip Efficiency =int
119905cycle
01198791015840
21205962119889119905
minus int
119905cycle
011987910158401015840
21205962119889119905
(18)
The round trip efficiency is the energy actually given by theKERS into the vehicle propshaft per cycle divided by theenergy actually given by the propshaft to the KERS per cycle
5 Results
In this section we first present the main traction andefficiency performance of the three investigated toroidaltraction drives and afterwards we focus on the energyrecovery efficiency of a KERS geometry based on these kindof transmissions The fluid properties are reported in Table 1and the geometrical data of the three variators in Table 2
51 Traction Behavior of the DFTV Figure 4 shows theperformance in terms of traction and efficiency of thedouble toroidal traction drive (DFTV) Calculations havebeen carried out at constant values of the primary speed1205961
= 2000RPM and normal contact load 119865119873
= 20 kNInterestingly since the DFTV variator presents negligiblevalues of spin losses at unit ratio (blue curve in Figure 4(a))in this case the traction curve increases very fast as the creepis increased from zero However at different speed ratios
Table 2 The geometric data of the three toroid geometries
SHTV SFTV DFTVCavity radius 119903
040mm 40mm 40mm
Roller radius 1199032
346mm 40mm 187mmConformity ratio CR = 119903
221199030
08 05 08
Half-cone angle 120579 1205873 1205872 1205872
Incidence cone-angle 120572 43 degAspect ratio 119896 = 119890119903
00625 025 0286
119873∘ of cavities119898 2 2 2
119873∘ of rollers set 119899 3 3 3
119873∘ of rollers per set 119899
1199031 1 2
119904119903ID
= 05 (red curve in Figure 4(a)) and 119904119903ID
= 2 (blackcurve in Figure 4(a)) the presence of spin losses determinesa strong decrease of traction versus creep slope The linearbehavior is observed until a creep value 119862
119903= 002 is
reached where the traction curve presents a typical kneethat corresponds to the maximum achievable value of outputdimensionless torque (119905out)max asymp 0095 In Figure 4(b) weshow the variator mechanical efficiency 120584 as a function ofthe dimensionless input torque 119905in It is worth noticing thatat 119904119903ID
= 1 the efficiency takes very high values equal toabout 098 on most part of the input torque range Howeveras 119905in (and therefore 119905out) approaches its limiting value theefficiency rapidly drops because of the fast increase of the
6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Advances in Tribology 5
Table 1 Fluid properties at 119879 = 99∘C
Absolute viscosity at the atmospheric pressure 1205780= 325 times 10
minus3 Pa sViscosity-pressure index 119885
1= 085
Pressure-viscosity coefficient 120577 = 171 times 10minus8 Paminus1
Limiting shear stress at atmospheric pressure 1205911198710
= 002 times 109 Pa
Limiting shear stress constant 119886 = 0085
Pole pressure constant of Roelands viscosity model 119888119901= 196 times 10
8 PaPole viscosity of Roelands viscosity model 120578
infin= 631 times 10
minus5 Pa s
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(a)
0 002 004 006 008 01
1
119905in
09
08
07120584
119904119903ID = 1
119904119903ID = 05
119904119903ID = 2
(b)
Figure 4 The DFTV variator performance The dimensionless output torque 119905out as a function of the overall creep coefficient C119903(a) and the
overall mechanical efficiency 120584 as a function of the input torque coefficient 119905in (b) for the three geometric ratios (119904119903ID
= 05 minus black curve119904119903ID
= 1minus blue curve 119904119903ID
= 2minus red curve) Calculations are shown for 119865119873= 20 kN
The round trip efficiency is calculated as
Round Trip Efficiency =int
119905cycle
01198791015840
21205962119889119905
minus int
119905cycle
011987910158401015840
21205962119889119905
(18)
The round trip efficiency is the energy actually given by theKERS into the vehicle propshaft per cycle divided by theenergy actually given by the propshaft to the KERS per cycle
5 Results
In this section we first present the main traction andefficiency performance of the three investigated toroidaltraction drives and afterwards we focus on the energyrecovery efficiency of a KERS geometry based on these kindof transmissions The fluid properties are reported in Table 1and the geometrical data of the three variators in Table 2
51 Traction Behavior of the DFTV Figure 4 shows theperformance in terms of traction and efficiency of thedouble toroidal traction drive (DFTV) Calculations havebeen carried out at constant values of the primary speed1205961
= 2000RPM and normal contact load 119865119873
= 20 kNInterestingly since the DFTV variator presents negligiblevalues of spin losses at unit ratio (blue curve in Figure 4(a))in this case the traction curve increases very fast as the creepis increased from zero However at different speed ratios
Table 2 The geometric data of the three toroid geometries
SHTV SFTV DFTVCavity radius 119903
040mm 40mm 40mm
Roller radius 1199032
346mm 40mm 187mmConformity ratio CR = 119903
221199030
08 05 08
Half-cone angle 120579 1205873 1205872 1205872
Incidence cone-angle 120572 43 degAspect ratio 119896 = 119890119903
00625 025 0286
119873∘ of cavities119898 2 2 2
119873∘ of rollers set 119899 3 3 3
119873∘ of rollers per set 119899
1199031 1 2
119904119903ID
= 05 (red curve in Figure 4(a)) and 119904119903ID
= 2 (blackcurve in Figure 4(a)) the presence of spin losses determinesa strong decrease of traction versus creep slope The linearbehavior is observed until a creep value 119862
119903= 002 is
reached where the traction curve presents a typical kneethat corresponds to the maximum achievable value of outputdimensionless torque (119905out)max asymp 0095 In Figure 4(b) weshow the variator mechanical efficiency 120584 as a function ofthe dimensionless input torque 119905in It is worth noticing thatat 119904119903ID
= 1 the efficiency takes very high values equal toabout 098 on most part of the input torque range Howeveras 119905in (and therefore 119905out) approaches its limiting value theefficiency rapidly drops because of the fast increase of the
6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Advances in Tribology
0
002
004
006
008
01119905 o
ut
0 002 004 006 008 01119862119903
SFTV
DFTV
SHTV
(a)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(b)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTVSHTV
(c)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV120584
(d)
0 002 004 006 0080
002
004
006
008
01
01119862119903
119905 out
SFTV
DFTV
SHTV
(e)
0 002 004 006 008 01
1
119905in
09
08
07
SFTV
DFTV
SHTV
120584
(f)
Figure 5 The effective output torque 119905out as a function of the overall creep coefficient 119862119903and the overall efficiency 120584 as a function of the
effective input torque s119903ID
= 1 for DFTV SHTV and SFTV Calculations are presented for a normal load 119865119873= 20 kN
creep coefficient At the extreme ratios 119904119903ID
= 05 (red curve)119904119903ID
= 2 (black curve) in Figure 4(b) the trend of the 120584
versus 119905in resembles the behavior observed for 119904119903ID
= 1 butthe efficiency values are considerably smaller over the wholetorque range with a maximum value close to 094-095
52 Comparison of DFTV SFTV and SHTV Figure 5 com-pares quantitatively the different toroidal variators in termsof traction capabilities and efficiency Calculations have been
carried out at given constant values of the primary speed1205961= 2000RPM and of the normal load 119865
119873= 20 kN The
dimensionless output torque 119905out is plotted against the overallcreep coefficient 119862
119903 whereas the efficiency 120584 is represented
as a function of the input dimensionless torque 119905in In allcases we observe as expected an almost linear increaseof 119905out as 119862119903 is increased from zero However as the creepincreases the curve starts to deviate from the linear trendand reaches a saturation value in correspondence of the
Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Advances in Tribology 7
maximum transmissible torque Interestingly the slope of thelinear part of the three traction curves is different for thethree different variators and also changes as the geometricspeed ratio 119904
119903IDis changed In all cases the SFTV shows a
significantly worse behavior if compared to the other twotypologies More interesting is to compare the SHTV andthe DFTV At ratios 119904
119903ID= 07 and 119904
119903ID= 15 the two
variators show almost the traction capabilities however theDFTV performs significantly better than the SHTV in termsof mechanical efficiency The DFTV strongly outperformsboth in terms of traction andmechanical efficiency the SHTVat geometric speed ratio 119904
119903ID= 1 as a consequence of the very
limited amount of spin motion and spin momentum
53 KERS Performance The simulations of KERS perfor-mance have been carried out with the data of a typicalcity car (more details are in [15]) The main features of theKERS device follow We have considered a CVT KERS massequal to about 25 kg The simulations have been performedconsidering a flywheel with the following characteristicsflywheel inertia 119869
119891= 00562 kgm2 flywheel minimum
velocity 120596119891min
= 12 kRPM and flywheel maximum velocity120596119891max
= 24 kRPM (upper and lower bounds have been chosenaccording to [17]) The mechanical hybrid under analysis canbe exploited for urban driving applications The maximumenergy which can be stored in the flywheel is about 178 kJ thatcorresponds to the kinetic energy of the vehicle at 60 kphThe simulations have been performed following the urbanFTP-75 driving schedule The driving schedule has beenconsidered as a periodic function which must be followedby the vehicle The state of charge of the flywheel is thesame at the beginning and at the end of the cycle [4] Inorder to compare the performance which can be achievedwith different variators for any given toroidal traction driveunder investigation the speed ratio 120591FM of the finalmultiplierhas been optimized and this optimal value has been usedto carry out the simulations The mechanical efficiencies ofDFTV SHTV and SFTVhave been calculated bymeans of theanalytical models presented in previous sections We assumethat the clamping system allows to control the clamping forcein order to optimize the efficiency of the toroidal tractiondrive for any given speed ratio and the input torque In orderto perform simulations under these working conditions theefficiency has been calculated with the optimal value of thenormalized input torque 119905in with different speed ratios andthe results are shown in Figure 6 The ratio spread of thethree variators is equal to 4 with the speed ratio rangingfrom 119904
119903IF= 05 to 119904
119903IF= 20 It is shown that the efficiency
of the SFTV is smaller than the efficiency of the DFTV andthe SHTV over the entire range of speed ratios The DFTVoutperforms the SHTV only in the intermediate range ofspeed ratio values The results of our simulations are shownin Figure 7 The KERS boost (see Figure 7(a)) in the FTP-75driving schedule is equal to 204 with DFTV and 202with SHTV (the difference is almost negligible) whereasit is equal to 184 in the case of SFTV Because SFTVis the one which is currently used in mechanical hybridsystems our results show that a correct choice of the variator
1 15 2
085
095
1
DFTVSHTVSFTV
08
09
05
120584
119904119903ID
Figure 6 The optimal efficiency values of three toroidal CVTs as afunction of the speed ratio s
119903ID
may lead to an improvement of the KERS boost of about10 Similar results are shown in FTP driving schedule Inthis case the KERS boost is about 102 with SFTV 113with SHTV and 115 with DFTV As expected the bestperformance are obtained in the urban drive Figure 7(b)shows the overall round-trip efficiency of the KERS in FTP-75 and FTP driving schedules and a comparison of theresults achievedwith SFTV SHTVandDFTVThe round-tripefficiency is not much affected by the driving style whereasthe SFTV efficiency is about 7 smaller in comparison to theDFTV and the SHTV In our analysis we have considereda ratio spread close to 4 for all the toroidal traction drivesHowever we notice that a variable drive with a larger ratiospread may perform even better provided that the efficiencyremains sufficiently high [15] However the twofold objectiveof designing a variatorwhich possesses both large ratio spreadand high mechanical efficiency over the entire speed ratiorange is a quite challenging task Different variators mayprovide different room for further improvement and fromthis point of view further investigations should deal withthe optimization of the design of the DFTV and SHTV forapplication to KERS
6 Conclusions
We have analyzed the efficiency and traction performanceof three toroidal traction drives the SFTV the SHTV andthe recently patented DFTV The latter has been designedin such a way to combine the advantages of the other twoexisting toroidal geometries and shows enhanced efficiencyand traction performance The DFTV variator consists of aset of counter-rotating conical rollers which are placed intoa toroidal cavity the geometric characteristics of the powerrollers allow to reduce the spin losses in a wide range ofspeed ratios and to get rid of the thrust ball-bearing whichcontributes to the torque losses of the half-toroidal type
8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Advances in Tribology
FTP 75 FTP0
5
10
15
20
25KE
RS b
oost
()
SFTVSHTVDFTV
(a)
FTP 75 FTP0
20
40
60
80
Roun
d-tr
ip effi
cien
cy (
)
SFTVSHTVDFTV
(b)
Figure 7 The KERS boost (a) and the KERS round trip efficiency (b) calculated in FTP 75 (urban) and FTP (mixed) driving schedules
geometry In order to evaluate the performance of the toroidaltraction drives we have developed a fully flooded isothermalcontactmodel based on the results of EHL lubrication theoryOur calculations have shown the effectiveness of the DFTVgeometric characteristics in terms of reduction of spin lossesand improvement of the overall efficiency The very highmechanical efficiency and traction performance of the DFTVhave then been exploited to investigate the performance ofa mechanical Kinetic Energy Recovery System (KERS) Theenergy boost capabilities and the overall round trip efficiencyhave been calculated for DFTV SHTV and SFTV and acomparison has been discussed The results have shown thatthe choice of DFTV and SHTV leads to a very significantincrease of the KERS boost capability in urban drive whichis about 10 larger than the result achieved with SFTV
References
[1] G Mantriota ldquoFuel consumption of a vehicle with power splitCVT systemrdquo International Journal of Vehicle Design vol 37 no4 pp 327ndash342 2005
[2] C Brace M Deacon N D Vaughan RW Horrocks and C RBurrows ldquoThe compromise in reducing exhaust emissions andfuel consumption from a diesel CVT powertrain over typicalusage cyclesrdquo in Proceedings of the Inernational Congress onContinuously Variable Power Transmission (CVT rsquo99) pp 27ndash33 Eindhoven The Netherlands September 1999
[3] G Carbone L Mangialardi and G Mantriota ldquoFuel consump-tion of a mid class vehicle with infinitely variable transmissionrdquoSAE International Journal of Engines vol 110 no 3 pp 2474ndash2483 2002
[4] D Cross and C Brockbank ldquoMechanical hybrid system com-prising a flywheel and CVT for motorsport and mainstreamautomotive applicationsrdquo SAE Technical Paper 2009-01-1312
[5] C Brockbank ldquoDevelopment of full-toroidal traction drivesin flywheel based mechanical hybridsrdquo in Proceedings of theCVT Hybrid International Conference (CVT rsquo10) pp 163ndash169Maastricht The Netherlands November 2010
[6] A Barr and A Veshnagh ldquoFuel economy and performancecomparison of alternative mechanical hybrid powertrain con-figurationsrdquo SAE Technical Paper 2208-01-0083
[7] C Brockbank andW Body ldquoFlywheel basedmechanical hybridsystem simulation of the fuel consumption benefits of varioustransmission arrangements and control strategiesrdquo in Proceed-ings of the ASME International Design Engineering TechnicalConferences amp Computers and Information in Engineering Con-ference (IDETCCIE rsquo10) Montreal Canada August 2010
[8] G Carbone L De Novellis G Commissaris andM SteinbuchldquoAn enhanced CMM model for the accurate prediction ofsteady-state performance of CVT chain drivesrdquo Journal ofMechanical Design Transactions of the ASME vol 132 no 2Article ID 021005 8 pages 2010
[9] L De Novellis and G Carbone ldquoExperimental investigationof chain link forces in continuously variable transmissionsrdquoJournal ofMechanical Design Transactions of theASME vol 132no 12 Article ID 121004 2010
[10] G Carbone L Mangialardi and G Mantriota ldquoInfluence ofclearance between plates in metal pushing V-belt dynamicsrdquoJournal ofMechanicalDesign Transactions of theASME vol 124no 3 pp 543ndash557 2002
[11] T Imanishi and H Machida ldquoDevelopment of powertoros unithalf-toroidal CVT (2)mdashcomparison between half-toroidal andfull-toroidal CVTsrdquoMotion amp Control no 10 2001
[12] M J Durack ldquoFull toroidal traction drive world intellec-tual property organizationrdquo International Publication WO2011041851 A1 httpworldwideespacenetcom
[13] G Carbone L Mangialardi and G Mantriota ldquoA comparisonof the performances of full and half toroidal traction drivesrdquoMechanism and Machine Theory vol 39 no 9 pp 921ndash9422004
Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Advances in Tribology 9
[14] L De Novellis G Carbone and L Mangialardi ldquoTractionand efficiency performance of the Double roller Full ToroidalVariator a comparison with Half- and Full- Toroidal drivesrdquoASME Journal of Mechanical Design vol 134 no 7 Article ID071005 14 pages 2012
[15] F Bottiglione and G Mantriota ldquoEffect of the ratio spread ofCVU in automotive Kinetic Energy Recovery Systemsrdquo ASMEJournal of Mechanical Design In Press
[16] L Mangialardi and G Mantriota ldquoPower flows and efficiencyin infinitely variable transmissionsrdquo Mechanism and MachineTheory vol 34 no 7 pp 973ndash994 1999
[17] C J Greenwood ldquoAn energy recovery system for a vehicle driv-elinerdquo World Intellectual Property Organization InternationalPublication WO2009141646 A1 httpworldwideespacenetcom
[18] F Bottiglione and G Mantriota ldquoReversibility of power-splittransmissionsrdquo Journal of Mechanical Design vol 133 no 8Article ID 084503 5 pages 2011
[19] SKF General Catalogue 2003[20] B J Hamrock Fundamentals of Fluid Film Lubrication Series
in Mechanical Engineering Book McGraw-Hill 1994
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of