Embed Size (px)
Citation preview

Research ArticleExtended Traffic Alert Information to Improve TCASPerformance by means of Causal Models
Jun Tang1 Miquel Angel Piera1 Yunxiang Ling23 and Linjun Fan2
1Department of Telecommunication and System Engineering Autonomous University of Barcelona 08202 Sabadell Spain2Department of Management Science and Project Police Officer College of Chinese Armed Police Force Chengdu 610213 China3Science and Technology on Information Systems Engineering Laboratory National University of Defense TechnologyChangsha 410072 China
Correspondence should be addressed to Yunxiang Ling yunxiang lingyeahnet
Received 23 January 2015 Revised 20 May 2015 Accepted 16 June 2015
Academic Editor Ricardo Aguilar-Lopez
Copyright copy 2015 Jun Tang et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Near-midair collisions (NMACs) between aircraft have long been a primary safety concern and have incessantly motivated thedevelopment of ingenious onboard collision avoidance (CA) systems to reduce collision risk The Traffic Alert and CollisionAvoidance System (TCAS) acts as a proverbially accepted last-resort means to resolve encounters while it also has been provedto potentially induce a collision in the hectic and congested traffic This paper aims to improve the TCAS collision avoidanceperformance by enriching traffic alert information which strictly fits with present TCAS technological requirements and extendsthe threat detection considering induced collisions and probabilistic pilot response The proposed model is specified in colouredPetri net (CPN) formalism to generate by simulation all the future possible downstream reachable states to enhance the follow-up decision making of pilots via synthesising relevant information related to collision states With the complete state space thepotential collision scenarios can be identified together with those manoeuvres that may transform a conflict into a collision Thecausal TCASmodel is demonstrated to work effectively for complex multiaircraft scenarios and to identify the feasible manoeuvresthat contribute to reduce the nonzero TCAS-induced collision risk
1 Introduction
The Traffic Alert and Collision Avoidance System (TCAS)which is utilized as the final safeguard to decrease the riskof near-midair collisions (NMACs) is one of the mandatoryequipment on all commercial transport aircraft and its latestversion is TCAS II 71 [1]The TCAS equipped in aircraft is aninstrument that constitutes a safety network in midair Themain responsibility of TCAS is to notify and avoid collisionwith any airborne object in a radius distance of 14NM [1]TCAS technology does not dominate the vehicle directly itjust issue advisories to crews in corresponding aircraft onhow to resolve conflict using vertical manoeuvres Whenan intruder approaches in the periphery of preconcertedprotected volume of themain aircraft a threat is detected andthe tracking of intruder aircraft is performed via broadcastinginquiries and receiving answers from the intruderrsquos Mode Stransponder [2]
TCAS executes independently of ground-based systemswhile it is basically supported with relevant surveillanceequipment onboard the vehicle TCAS I and TCAS II (theimproved version) differ primarily in the capability of alerting[1] TCAS I can offer traffic advisories (TAs) to aid the crewsin the visual acquisition of nearby aircraft while TCAS II cansupply them with not only TAs but also resolution advisories(RAs)
TCAS only provides a signal of upward or downwardadvisory as a solution of an emergent threat In high-densityscenarios the execution of an RA may initiate anothernew secondary threat (negative domino effect) situation inwhich the pilots have no enough time to respond [3] Severalencounter models have been previously developed by variousorganizations to support the estimation of collision risk In[4] a new cooperative aircraft encounter model is proposedbased on the generation of random threats in fast-timeMonteCarlo simulations to test the TCAS and evaluate the NMAC
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 303768 11 pageshttpdxdoiorg1011552015303768
2 Mathematical Problems in Engineering
risk Authors implemented a dynamic Bayesian network tocapture the real-time vertical velocity to simulate the collisionavoidance (CA) course Reference [5] develops the concep-tual model based on stochastically and dynamically colouredPetri nets (SDCPN) which has different core elementsof TCAS operations In addition it completely supportsthe quantitative analysis of aircraft encounters The threedimensions (3D) collision risk model (CRM) provided in [6]assesses aircraft safety level based exclusively upon the trackprocess It is proposed to supplement the accident databasestherefore offering valuable information on impactingfactors inferred from the deep assessment of neighbouringscenarios To generate multithreat encounters [7] extendsthe statistical techniques used to develop pairwise correlatedencounters Their study results quantitatively indicate thevariation of risk ratio which measures how the probability ofan NMAC changes when an aircraft is equipped with TCASversus being unequipped Besides in our previous research[8 9] the causal encounter models have been proposed andimproved to identify TCAS weaknesses (potential collision)by predictively generating the flyable scenario for a specificscenario and the relationship between potential collisionsand different pilot delays has been displayed
However in the heavy traffic TCAS may induce apotential collision In addition there is a lack of mechanismsto improve the TCAS avoidance performance in dense airtraffic This study relies on a causal CPN model which isabsolutely in view of the TCAS-based avoidance operationsto generate all the future possible states in which the potentialcollision states should be underlined In this paper it isconsidered high-density traffic scenarios with all aircraftTCAS equipped Recorded radar data show that the crews incorresponding aircraft do not follow the TCAS logic (eg notfollowing the TCAS advisory or delayed response manoeu-vre) [10] In terms of practicality each aircraft involved inthe TCAS-TCAS scenario may amend or not amend theheading when an RA is aroused The main contributions ofthis research are
(i) the causal TCAS model operates when a TA isdeclared and aims to provide better advisories at thesubsequent RAs It provides a complete and successiveview of state and its evolution thus the occurrenceprocess of TCAS-induced collision would be moreclearly sensed A warning will be automatically dis-played in the pilot visualization tools at RA when theimproper manoeuvres may induce a collision for thecurrent traffic situation
(ii) the mathematical model for TCAS operations andpilot response are clearly specified in a TCAS-TCASencounter For the whole sociotechnical air trafficmanagement (ATM) system TCAS acts as one ofthe core parts to ensure flight safety Obviously thebehaviours (active or passive) of pilots would makean important influence on avoiding collision Usinga series of mathematical equations this completeCA process including probabilistic pilot response has
been conceptually described as the theoretical basisfor constructing the encounter model
(iii) this causalmodel can enhance theTCASperformanceat the operational level in high-density traffic sce-narios (without the need to heighten or change therelevant logic) to enable precise monitoring of all ofthe traffic to assure safe and efficient operations
Note that the causal TCAS model which plays an impor-tant role in the CA process for multiple aircraft does nottake the horizontal manoeuvring into consideration It fullyabides by the TCAS logic and only determines all of thepossible future states that could aid decisionmaking for crewsin the involved aircraft If a combination of horizontal andvertical steering would synchronously be considered thenmany potential ldquofall-outrdquo trajectories could arise Besidesseveral legal and technical principles have to be reset byaviation authorities and the existing TCAS logic should bereconstructed
The framework of this paper is as follows Section 2illustrates the conceptual model of TCAS with the possiblepilot reactions Section 3 represents the CPN-based causalmodel Section 4 shows the simulation results and providesthe analysis of a case scenario finally the conclusions aresummarized in Section 5
2 Mathematical Description ofAvoidance Operations
This section specifies the conceptual model for improving theCA performance of TCAS For Aircraft 119894 (119894 = 1 2 119899) itsdynamic characteristics at time 119905 can be described as follows
119901119894
119905=[[[
[
119909119894
119905
119910119894
119905
119911119894
119905
]]]
]
V119894119905=119889119901119894
119905
119889119905=[[[
[
V119894119905cos 120574119894119905cos 120579119894119905
V119894119905cos 120574119894119905sin 120579119894119905
V119894119905sin 120574119894119905
]]]
]
=[[[
[
V119894119905119909
V119894119905119910
V119894119905119911
]]]
]
0 lt 120579119894119905lt 2120587 minus120587
2le 120574119894
119905le120587
2
(1)
For Aircraft 119894 the formula defines 119901119894119905and V119894119905as its position
and velocity at time 119905 in 3D aerospace Here 120574119894119905indicates the
pitch angle which represents the orientation of velocity vectorV119894119905in the vertical plane while 120579119894
119905acts as the course angle which
is the orientation of velocity vector V119894119905in the horizontal plane
Considering the geometry of the encounter betweenAircraft 119894andAircraft 119895 several important parameters can be calculatedas follows [9]
Mathematical Problems in Engineering 3
119879119894119895
119905CPA ℎ=
minusradic(119909119894
119905minus 119909119895
119905)2
+ (119910119894
119905minus 119910119895
119905)2
radic(V119894119905119909minus V119895119905119909)2
+ (V119894119905119910minus V119895119905119910)2
sdot cos (120572119894119895119905minus 120573119894119895
119905)
cos120572119894119895119905= arctan(
V119894119905119909minus V119895119905119909
V119894119905119910minus V119895119905119910
)
cos120573119894119895119905= arctan(
119909119894
119905minus 119909119895
119905
119910119894
119905minus 119910119895
119905
)
119879119894119895
119905CPA 119911= minus
119911119894
119905minus 119911119895
119905
V119894119905119911minus V119895119905119911
119863119894119895
119905ℎ= radic(119909
119894
119905minus 119909119895
119905)2+ (119910119894
119905minus 119910119895
119905)2
119863119894119895
119905119911=10038161003816100381610038161003816119911119894
119905minus 119911119895
119905
10038161003816100381610038161003816
119863119894119895
119905CPA ℎ= radic[(119909
119894
119905+ V119894119905119909sdot 119879119894119895
119905CPA 119911)2minus (119909119895
119905+ V119895119905119909sdot 119879119894119895
119905CPA 119911)2] + [(119910
119894
119905+ V119894119905119910sdot 119879119894119895
119905CPA 119911)2minus (119910119895
119905+ V119895119905119910sdot 119879119894119895
119905CPA 119911)2]
119863119894119895
119905CPA 119911= radic[(119911
119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ)2minus (119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ)2]
(2)
Note that 119879119894119895119905CPA ℎ
(horizontal plane) and 119879119894119895119905CPA 119911
(verticalplane) are separately the time to the closest point of approach(CPA) Besides 120572119894119895
119905is defined as the direction angle of the
velocity difference vector while 120573119894119895
119905(120572119894119895119905minus 120573119894119895
119905= plusmn1205872)
indicates the direction angle of the position difference vector119863119894119895
119905ℎand 119863119894119895
119905119911indicate their distances in the horizontal and
vertical planes at time 119905119863119894119895119905ℎand119863119894119895
119905119911indicate their horizontal
and vertical distances at CPATo improve the computational efficiency only the TA
which would deteriorate into RA is considered in thisresearch The situation should meet the following set ofconditions
(0lt119879119894119895119905CPA ℎ
ltTimeTA) and (0lt119879119894119895
119905CPA 119911ltTimeTA)
and (119863119894119895
119905CPA ℎltDMODRA) and (119863
119894119895
119905CPA 119911ltZTHRRA)
(3)
An RA would be issued when
[(0lt119879119894119895119905ℎltTimeRA) and (0lt119879
119894119895
119905119911ltTimeRA)]
or [(119863119894119895
119905ℎltDMODRA) and (119863
119894119895
119905119911ltZTHRRA)]
(4)
where TimeRA [1] indicates the time to the CPA constraintwhile DMODRA and ZTHRRA [1] are separately the range andaltitude threshold When an RA occurs a two-step process isrequired to generate the appropriate advisories for resolvingconflicts [1] First the amending sense is obtained on accountof the predictive CPA altitude In terms of practicality each
aircraft has three choices (climbunchangeddescend) whenan RA is aroused Define 119862119894
119905RAas the possible selection of
Aircraft 119894 at 119905RA
119862119894
119905RA=
1 climb
0 unchanged
minus1 descend
(5)
ForAircraft 119894 andAircraft 119895which are involved in the samethreat their response combination 119862119894119895
119905RA= (119862119894
119905RA 119862119895
119905RA) can be
(1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1)Second the RA strength is calculated to provide adequate
separation between the involved aircraft at CPA Normallythe initial 119886
0= 025 g acceleration manoeuvre would be
adopted within 5 seconds [1]
119911119894
119905CPA ℎ= 119911119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ
119911119895
119905CPAℎ= 119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ
(6)
If 119862119894119895119905RA= (1 0) for Aircraft 119894 the appropriate amendment
strength should be
Δ119894
119905119911= ALIMRA + 119911
119894
119905CPAℎminus 119911119895
119905CPAℎ (7)
4 Mathematical Problems in Engineering
Additionally the acceleration time 1199051198941198860
of Aircraft 119894 meetsthe following formula
Δ119894
119905119911=
1198860119905119894
1198860
2
2+ 1198860119905119894
1198860(119879119894119895
119905CPA ℎminus 119905119894
1198860)
(8)
Thus
119905119894
1198860
= 119879119894119895
119905CPA ℎminusradic119879119894119895
119905CPA ℎ
2
minus2Δ119894
119905119911
1198860
(9)
For the other possible response combinations the calcu-lation process is similar
TCAS may induce a domino threat in high-density airtraffic For the secondary threat pilot response with 1198861 =035 g acceleration is set within 25 seconds [1] But a dominoconflict would deteriorate into an induced collision if the timeis not adequate Assume that Aircraft 119894 has a secondary threatwithAircraft 119895 If atmoment 119905
1198861
the diameter and height of thecollision volumes of both aircraft overlap a potential collisionwould emerge
119863119894119896
1199051198861
ℎ= radic(119909
119894
1199051198861
minus 119909119896
1199051198861
)
2+ (119910119894
1199051198861
minus 119910119896
1199051198861
)
2le 119863cl
119863119894119896
1199051198861 119911=100381610038161003816100381610038161003816119911119894
1199051198861minus 119911119896
1199051198861
100381610038161003816100381610038161003816le 119867cl
(10)
Here at time 1199051198861
1198631198941198961199051198861
ℎand 119863119894119896
1199051198861
119911separately indicate the
horizontal and vertical distances between the correspondingaircraft In this paper a vehicle is modeled as a unique point[3] that is surrounded by a 3D safety volume (cylinder) andtherefore a collision will break out when the diameter andheight criteria (119863cl and119867cl) are violated simultaneously
Because of the possible selections (climbunchangeddescend) of each aircraft when an RA fires there would bea great deal of future states that a scenario could emerge fromcurrent state in a multiaircraft scenario
3 Causal Analysis Model in CPN Formalism
In this section the causal analysis model to improve theTCAS avoidance performance is modelled discretely to con-sider the continuous dynamics Based on CPN [11] it aimsto generate all the future possible states and screen out thepotential collision states that should be forcibly avoided
31 Coloured Petri Net CPN is an effective modelling for-malism for multiple complex systems and it has been widelyutilized to realize and verify systems representing not onlythe static behaviour and system dynamics but also theinformation flow [12] CPN is used as a graphical languagewhich combines the capabilities of a Petri net (PN) [13]with the advantages of an effective programming languagemodelling concurrent systems and analysing their properties
Definition 1 A nonhierarchical CPN is a nine-tuple [14]
CPN = (Σ 119875 119879 119860119873 119862 119866 119864 119868) (11)
where
(i) Σ = 1198621 1198622 119862nc represent the finite set ofcolours
(ii) 119875 = 1198751 1198752 119875np represent the finite set of placenodes
(iii) 119879 = 1198791 1198792 119879nt represent the set of transitionnodes 119875 cap 119879 =
(iv) 119860 = 1198601 1198602 119860na represent the directed arc set119860 sube 119875 times 119879 cup 119879 times 119875
(v) 119873 = the node function119873(119860119894) related with the input
and output arcs(vi) 119862 = the colour set functions 119862(119875
119894) specifying the
combination of colours for each place 119875 rarr Σ(vii) 119866 = the guard function 119866(119879
119894) which is associated
with transition nodes and normally used to inhibitthe event relatedwith the transition upon the attributevalues of the processed entities
(viii) 119864 = the arc expressions 119864(119860119894) which specify the
quantity and type of entities that can be selectedamong the ones present in the place node to enablethe transition
(ix) 119868 = the initialization function 119868(119875119894) allowing the value
specification for the initial entities in the places
Note that the state space analysis tool [15 16] of CPNcan be used to explore the systemsrsquo dynamic and to representall the reachable future state It is depicted by means of thereachability tree (also called occurrence graph)
Figure 1 illustrates the first level of a reachability treeand the state vector of the transition (1198794 of the causalencounter model described in Figure 2) with 3 places isrepresented In each position of the vector the tokensand their colours that are stored in each place node arerepresented Given this initial marking (11987510 11015840(5) 1198751111015840(1 0) + 1
1015840(1 minus1) + 1
1015840(0 1) + 1
1015840(0 minus1) + 1
1015840(minus1 0) +
11015840(minus1 1)) the only enabled events are those indicated by
T4 In addition T4 has six different combinations of tokens11015840(1 0) climbunchanged 11015840(1 minus1) climbdescend 11015840(0 1)
unchangedclimb 11015840(0 minus1) unchangeddescend 11015840(minus1 0)descendunchanged 11015840(minus1 1) descendclimbThe result of atransition corresponds to a new state vector (ie a new trafficscenario) And therefore CPN model can generate the wholestate space of a complex system without any extra behaviourin the simulation [17]
The reachability tree of theCAoperations applied to a cer-tain scenario allows us to comprehend the cause-effect rela-tionship of each system action and how the effects are spreaddownstream In essence the analysis problem becomes asearch problem in which the ATM can clearly determine theaircraftmanoeuvres that could lead to potential collisions andprovide feasible (or even optimal) advisories to the involvedpilots It is used as a causal analysis model to improve theTCAS avoidance performance in dense air traffic
32 Causal TCASModel Abundant research of TCAS weak-nesses explains that even with TCAS onboard an induced
Mathematical Problems in Engineering 5
P10 P11 P12
P10 P11 P12
P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12
T4T4
Root
Level 1
T4T4T4T4
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(0 1 5)1998400(1 0 5) 1998400(1 minus1 5) 1998400(0 minus1 5) 1998400(minus1 0 5) 1998400(minus1 1 5)
Figure 1 An example of reachability tree
collision also could emerge especially in the dense air traffic[2ndash9]Therefore based on themathematicalmodel presentedin the previous section a causal analysis model in CPNformalism is critical for the CA process of multiple aircraftNote that it is complementary to the widely used TCAS smartchanges in its logic
The proposed CPNmodel considers situations that occurin a short period of time with a local scope which resultsin the rectilinear motion of the aircraft from a simplifiedview Besides the local airspace that the multiple aircraftare involved in can be modelled as a Euclidean 3D spaceA Cartesian coordinate system [2] is used to represent theplanar projection of the Earth with minimum distortion [3]If the initial positions and speeds of the involved aircraftare known the sequence of following waypoints forming thepartial trajectories in local airspace can be easily calculated
The proposed CPN model has been depicted usingfourteen colours twenty-three places and ten transitionsFigure 2 illustrates the causal analysis model described inCPN and it includes three kinds of agents (Agent TCASprocessor Agent predictive computation and Agent aircraftcrew) that are modelled for the causal analysis
321 Agent TCAS Processor As is depicted in Figure 2 theAgent TCAS processor contains the part of carrying out theTCAS operations This agent contains three transitions
(i) T1 Sensitivity Level (SL) [1] Evaluation Different SLscorrespond to different TA and RA thresholds and SLis determined based on their flight altitudes
(ii) T2 Threat Detection The TA is issued when anotheraircraft approaches and a collision would emergewithin 20ndash48 s (variables are provided in P5) onaccount of the SL It tries to draw the pilotrsquos attentionand calculates the CPA to inform Agent predictivecomputation
(iii) T3 Threat Resolution TCAS issues the RA whena collision would emerge within 15ndash35 s (variablesare provided in P7) that is depending on the SLWith the communication of Agent aircraft crew theRA could be active (climb and descend) or passive
(not climb and not descend) In order to explore thepossible future situations this transition also servesto transmit RA waypoint information to the Agentpredictive computation
When the encounter has been resolved ldquoClear of Con-flictrdquo (CoC) would be advised and the relevant information isstored in P9
322 Agent Predictive Computation This Agent predictivecomputation contains the part of exploring the complete statespace of the possible future situations This agent integrateswith Agent TCAS processor to obtain the related aircraft statewhich are in the respective CA process and Agent aircraftcrew to receive the impact of pilot behaviour This agentcontains six transitions
(i) T5 Neighbouring Threat Selection The neighbouringthreats would have an interrelationship that may leadto a new secondary conflict or even potential colli-sion Thus distance and time tests are implementedon the neighbouring threats (eg threat1 betweenAircraft 119894 andAircraft 119895 threat2 betweenAircraft 119896 andAircraft 119897)
11986312119905CPA
= radic(1199091119905CPAminus 119909
2119905CPA)2+ (119910
1119905CPAminus 119910
2119905CPA)2+ (119911
1119905CPAminus 119911
2119905CPA)2
le 119863narby
(12)
11987912119905CPA
=100381610038161003816100381610038161199051119905CPAminus 119905
2119905CPA
10038161003816100381610038161003816le 119879narby (13)
If the distance (11986312119905CPA
) and time (11987912119905CPA
) at CPA ofboth threats (threat1 and threat2)meet the dimensioncriteria (119863narby) and time threshold (119879narby) the rela-tionship is declared to be adjacent
(ii) T6 Resolution Waypoints Summary This transitionconsolidates the multiaircraft waypoints at the begin-ning of RA and records the pilot responses to advi-sories for the successive research of domino threat
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
risk Authors implemented a dynamic Bayesian network tocapture the real-time vertical velocity to simulate the collisionavoidance (CA) course Reference [5] develops the concep-tual model based on stochastically and dynamically colouredPetri nets (SDCPN) which has different core elementsof TCAS operations In addition it completely supportsthe quantitative analysis of aircraft encounters The threedimensions (3D) collision risk model (CRM) provided in [6]assesses aircraft safety level based exclusively upon the trackprocess It is proposed to supplement the accident databasestherefore offering valuable information on impactingfactors inferred from the deep assessment of neighbouringscenarios To generate multithreat encounters [7] extendsthe statistical techniques used to develop pairwise correlatedencounters Their study results quantitatively indicate thevariation of risk ratio which measures how the probability ofan NMAC changes when an aircraft is equipped with TCASversus being unequipped Besides in our previous research[8 9] the causal encounter models have been proposed andimproved to identify TCAS weaknesses (potential collision)by predictively generating the flyable scenario for a specificscenario and the relationship between potential collisionsand different pilot delays has been displayed
However in the heavy traffic TCAS may induce apotential collision In addition there is a lack of mechanismsto improve the TCAS avoidance performance in dense airtraffic This study relies on a causal CPN model which isabsolutely in view of the TCAS-based avoidance operationsto generate all the future possible states in which the potentialcollision states should be underlined In this paper it isconsidered high-density traffic scenarios with all aircraftTCAS equipped Recorded radar data show that the crews incorresponding aircraft do not follow the TCAS logic (eg notfollowing the TCAS advisory or delayed response manoeu-vre) [10] In terms of practicality each aircraft involved inthe TCAS-TCAS scenario may amend or not amend theheading when an RA is aroused The main contributions ofthis research are
(i) the causal TCAS model operates when a TA isdeclared and aims to provide better advisories at thesubsequent RAs It provides a complete and successiveview of state and its evolution thus the occurrenceprocess of TCAS-induced collision would be moreclearly sensed A warning will be automatically dis-played in the pilot visualization tools at RA when theimproper manoeuvres may induce a collision for thecurrent traffic situation
(ii) the mathematical model for TCAS operations andpilot response are clearly specified in a TCAS-TCASencounter For the whole sociotechnical air trafficmanagement (ATM) system TCAS acts as one ofthe core parts to ensure flight safety Obviously thebehaviours (active or passive) of pilots would makean important influence on avoiding collision Usinga series of mathematical equations this completeCA process including probabilistic pilot response has
been conceptually described as the theoretical basisfor constructing the encounter model
(iii) this causalmodel can enhance theTCASperformanceat the operational level in high-density traffic sce-narios (without the need to heighten or change therelevant logic) to enable precise monitoring of all ofthe traffic to assure safe and efficient operations
Note that the causal TCAS model which plays an impor-tant role in the CA process for multiple aircraft does nottake the horizontal manoeuvring into consideration It fullyabides by the TCAS logic and only determines all of thepossible future states that could aid decisionmaking for crewsin the involved aircraft If a combination of horizontal andvertical steering would synchronously be considered thenmany potential ldquofall-outrdquo trajectories could arise Besidesseveral legal and technical principles have to be reset byaviation authorities and the existing TCAS logic should bereconstructed
The framework of this paper is as follows Section 2illustrates the conceptual model of TCAS with the possiblepilot reactions Section 3 represents the CPN-based causalmodel Section 4 shows the simulation results and providesthe analysis of a case scenario finally the conclusions aresummarized in Section 5
2 Mathematical Description ofAvoidance Operations
This section specifies the conceptual model for improving theCA performance of TCAS For Aircraft 119894 (119894 = 1 2 119899) itsdynamic characteristics at time 119905 can be described as follows
119901119894
119905=[[[
[
119909119894
119905
119910119894
119905
119911119894
119905
]]]
]
V119894119905=119889119901119894
119905
119889119905=[[[
[
V119894119905cos 120574119894119905cos 120579119894119905
V119894119905cos 120574119894119905sin 120579119894119905
V119894119905sin 120574119894119905
]]]
]
=[[[
[
V119894119905119909
V119894119905119910
V119894119905119911
]]]
]
0 lt 120579119894119905lt 2120587 minus120587
2le 120574119894
119905le120587
2
(1)
For Aircraft 119894 the formula defines 119901119894119905and V119894119905as its position
and velocity at time 119905 in 3D aerospace Here 120574119894119905indicates the
pitch angle which represents the orientation of velocity vectorV119894119905in the vertical plane while 120579119894
119905acts as the course angle which
is the orientation of velocity vector V119894119905in the horizontal plane
Considering the geometry of the encounter betweenAircraft 119894andAircraft 119895 several important parameters can be calculatedas follows [9]
Mathematical Problems in Engineering 3
119879119894119895
119905CPA ℎ=
minusradic(119909119894
119905minus 119909119895
119905)2
+ (119910119894
119905minus 119910119895
119905)2
radic(V119894119905119909minus V119895119905119909)2
+ (V119894119905119910minus V119895119905119910)2
sdot cos (120572119894119895119905minus 120573119894119895
119905)
cos120572119894119895119905= arctan(
V119894119905119909minus V119895119905119909
V119894119905119910minus V119895119905119910
)
cos120573119894119895119905= arctan(
119909119894
119905minus 119909119895
119905
119910119894
119905minus 119910119895
119905
)
119879119894119895
119905CPA 119911= minus
119911119894
119905minus 119911119895
119905
V119894119905119911minus V119895119905119911
119863119894119895
119905ℎ= radic(119909
119894
119905minus 119909119895
119905)2+ (119910119894
119905minus 119910119895
119905)2
119863119894119895
119905119911=10038161003816100381610038161003816119911119894
119905minus 119911119895
119905
10038161003816100381610038161003816
119863119894119895
119905CPA ℎ= radic[(119909
119894
119905+ V119894119905119909sdot 119879119894119895
119905CPA 119911)2minus (119909119895
119905+ V119895119905119909sdot 119879119894119895
119905CPA 119911)2] + [(119910
119894
119905+ V119894119905119910sdot 119879119894119895
119905CPA 119911)2minus (119910119895
119905+ V119895119905119910sdot 119879119894119895
119905CPA 119911)2]
119863119894119895
119905CPA 119911= radic[(119911
119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ)2minus (119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ)2]
(2)
Note that 119879119894119895119905CPA ℎ
(horizontal plane) and 119879119894119895119905CPA 119911
(verticalplane) are separately the time to the closest point of approach(CPA) Besides 120572119894119895
119905is defined as the direction angle of the
velocity difference vector while 120573119894119895
119905(120572119894119895119905minus 120573119894119895
119905= plusmn1205872)
indicates the direction angle of the position difference vector119863119894119895
119905ℎand 119863119894119895
119905119911indicate their distances in the horizontal and
vertical planes at time 119905119863119894119895119905ℎand119863119894119895
119905119911indicate their horizontal
and vertical distances at CPATo improve the computational efficiency only the TA
which would deteriorate into RA is considered in thisresearch The situation should meet the following set ofconditions
(0lt119879119894119895119905CPA ℎ
ltTimeTA) and (0lt119879119894119895
119905CPA 119911ltTimeTA)
and (119863119894119895
119905CPA ℎltDMODRA) and (119863
119894119895
119905CPA 119911ltZTHRRA)
(3)
An RA would be issued when
[(0lt119879119894119895119905ℎltTimeRA) and (0lt119879
119894119895
119905119911ltTimeRA)]
or [(119863119894119895
119905ℎltDMODRA) and (119863
119894119895
119905119911ltZTHRRA)]
(4)
where TimeRA [1] indicates the time to the CPA constraintwhile DMODRA and ZTHRRA [1] are separately the range andaltitude threshold When an RA occurs a two-step process isrequired to generate the appropriate advisories for resolvingconflicts [1] First the amending sense is obtained on accountof the predictive CPA altitude In terms of practicality each
aircraft has three choices (climbunchangeddescend) whenan RA is aroused Define 119862119894
119905RAas the possible selection of
Aircraft 119894 at 119905RA
119862119894
119905RA=
1 climb
0 unchanged
minus1 descend
(5)
ForAircraft 119894 andAircraft 119895which are involved in the samethreat their response combination 119862119894119895
119905RA= (119862119894
119905RA 119862119895
119905RA) can be
(1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1)Second the RA strength is calculated to provide adequate
separation between the involved aircraft at CPA Normallythe initial 119886
0= 025 g acceleration manoeuvre would be
adopted within 5 seconds [1]
119911119894
119905CPA ℎ= 119911119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ
119911119895
119905CPAℎ= 119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ
(6)
If 119862119894119895119905RA= (1 0) for Aircraft 119894 the appropriate amendment
strength should be
Δ119894
119905119911= ALIMRA + 119911
119894
119905CPAℎminus 119911119895
119905CPAℎ (7)
4 Mathematical Problems in Engineering
Additionally the acceleration time 1199051198941198860
of Aircraft 119894 meetsthe following formula
Δ119894
119905119911=
1198860119905119894
1198860
2
2+ 1198860119905119894
1198860(119879119894119895
119905CPA ℎminus 119905119894
1198860)
(8)
Thus
119905119894
1198860
= 119879119894119895
119905CPA ℎminusradic119879119894119895
119905CPA ℎ
2
minus2Δ119894
119905119911
1198860
(9)
For the other possible response combinations the calcu-lation process is similar
TCAS may induce a domino threat in high-density airtraffic For the secondary threat pilot response with 1198861 =035 g acceleration is set within 25 seconds [1] But a dominoconflict would deteriorate into an induced collision if the timeis not adequate Assume that Aircraft 119894 has a secondary threatwithAircraft 119895 If atmoment 119905
1198861
the diameter and height of thecollision volumes of both aircraft overlap a potential collisionwould emerge
119863119894119896
1199051198861
ℎ= radic(119909
119894
1199051198861
minus 119909119896
1199051198861
)
2+ (119910119894
1199051198861
minus 119910119896
1199051198861
)
2le 119863cl
119863119894119896
1199051198861 119911=100381610038161003816100381610038161003816119911119894
1199051198861minus 119911119896
1199051198861
100381610038161003816100381610038161003816le 119867cl
(10)
Here at time 1199051198861
1198631198941198961199051198861
ℎand 119863119894119896
1199051198861
119911separately indicate the
horizontal and vertical distances between the correspondingaircraft In this paper a vehicle is modeled as a unique point[3] that is surrounded by a 3D safety volume (cylinder) andtherefore a collision will break out when the diameter andheight criteria (119863cl and119867cl) are violated simultaneously
Because of the possible selections (climbunchangeddescend) of each aircraft when an RA fires there would bea great deal of future states that a scenario could emerge fromcurrent state in a multiaircraft scenario
3 Causal Analysis Model in CPN Formalism
In this section the causal analysis model to improve theTCAS avoidance performance is modelled discretely to con-sider the continuous dynamics Based on CPN [11] it aimsto generate all the future possible states and screen out thepotential collision states that should be forcibly avoided
31 Coloured Petri Net CPN is an effective modelling for-malism for multiple complex systems and it has been widelyutilized to realize and verify systems representing not onlythe static behaviour and system dynamics but also theinformation flow [12] CPN is used as a graphical languagewhich combines the capabilities of a Petri net (PN) [13]with the advantages of an effective programming languagemodelling concurrent systems and analysing their properties
Definition 1 A nonhierarchical CPN is a nine-tuple [14]
CPN = (Σ 119875 119879 119860119873 119862 119866 119864 119868) (11)
where
(i) Σ = 1198621 1198622 119862nc represent the finite set ofcolours
(ii) 119875 = 1198751 1198752 119875np represent the finite set of placenodes
(iii) 119879 = 1198791 1198792 119879nt represent the set of transitionnodes 119875 cap 119879 =
(iv) 119860 = 1198601 1198602 119860na represent the directed arc set119860 sube 119875 times 119879 cup 119879 times 119875
(v) 119873 = the node function119873(119860119894) related with the input
and output arcs(vi) 119862 = the colour set functions 119862(119875
119894) specifying the
combination of colours for each place 119875 rarr Σ(vii) 119866 = the guard function 119866(119879
119894) which is associated
with transition nodes and normally used to inhibitthe event relatedwith the transition upon the attributevalues of the processed entities
(viii) 119864 = the arc expressions 119864(119860119894) which specify the
quantity and type of entities that can be selectedamong the ones present in the place node to enablethe transition
(ix) 119868 = the initialization function 119868(119875119894) allowing the value
specification for the initial entities in the places
Note that the state space analysis tool [15 16] of CPNcan be used to explore the systemsrsquo dynamic and to representall the reachable future state It is depicted by means of thereachability tree (also called occurrence graph)
Figure 1 illustrates the first level of a reachability treeand the state vector of the transition (1198794 of the causalencounter model described in Figure 2) with 3 places isrepresented In each position of the vector the tokensand their colours that are stored in each place node arerepresented Given this initial marking (11987510 11015840(5) 1198751111015840(1 0) + 1
1015840(1 minus1) + 1
1015840(0 1) + 1
1015840(0 minus1) + 1
1015840(minus1 0) +
11015840(minus1 1)) the only enabled events are those indicated by
T4 In addition T4 has six different combinations of tokens11015840(1 0) climbunchanged 11015840(1 minus1) climbdescend 11015840(0 1)
unchangedclimb 11015840(0 minus1) unchangeddescend 11015840(minus1 0)descendunchanged 11015840(minus1 1) descendclimbThe result of atransition corresponds to a new state vector (ie a new trafficscenario) And therefore CPN model can generate the wholestate space of a complex system without any extra behaviourin the simulation [17]
The reachability tree of theCAoperations applied to a cer-tain scenario allows us to comprehend the cause-effect rela-tionship of each system action and how the effects are spreaddownstream In essence the analysis problem becomes asearch problem in which the ATM can clearly determine theaircraftmanoeuvres that could lead to potential collisions andprovide feasible (or even optimal) advisories to the involvedpilots It is used as a causal analysis model to improve theTCAS avoidance performance in dense air traffic
32 Causal TCASModel Abundant research of TCAS weak-nesses explains that even with TCAS onboard an induced
Mathematical Problems in Engineering 5
P10 P11 P12
P10 P11 P12
P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12
T4T4
Root
Level 1
T4T4T4T4
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(0 1 5)1998400(1 0 5) 1998400(1 minus1 5) 1998400(0 minus1 5) 1998400(minus1 0 5) 1998400(minus1 1 5)
Figure 1 An example of reachability tree
collision also could emerge especially in the dense air traffic[2ndash9]Therefore based on themathematicalmodel presentedin the previous section a causal analysis model in CPNformalism is critical for the CA process of multiple aircraftNote that it is complementary to the widely used TCAS smartchanges in its logic
The proposed CPNmodel considers situations that occurin a short period of time with a local scope which resultsin the rectilinear motion of the aircraft from a simplifiedview Besides the local airspace that the multiple aircraftare involved in can be modelled as a Euclidean 3D spaceA Cartesian coordinate system [2] is used to represent theplanar projection of the Earth with minimum distortion [3]If the initial positions and speeds of the involved aircraftare known the sequence of following waypoints forming thepartial trajectories in local airspace can be easily calculated
The proposed CPN model has been depicted usingfourteen colours twenty-three places and ten transitionsFigure 2 illustrates the causal analysis model described inCPN and it includes three kinds of agents (Agent TCASprocessor Agent predictive computation and Agent aircraftcrew) that are modelled for the causal analysis
321 Agent TCAS Processor As is depicted in Figure 2 theAgent TCAS processor contains the part of carrying out theTCAS operations This agent contains three transitions
(i) T1 Sensitivity Level (SL) [1] Evaluation Different SLscorrespond to different TA and RA thresholds and SLis determined based on their flight altitudes
(ii) T2 Threat Detection The TA is issued when anotheraircraft approaches and a collision would emergewithin 20ndash48 s (variables are provided in P5) onaccount of the SL It tries to draw the pilotrsquos attentionand calculates the CPA to inform Agent predictivecomputation
(iii) T3 Threat Resolution TCAS issues the RA whena collision would emerge within 15ndash35 s (variablesare provided in P7) that is depending on the SLWith the communication of Agent aircraft crew theRA could be active (climb and descend) or passive
(not climb and not descend) In order to explore thepossible future situations this transition also servesto transmit RA waypoint information to the Agentpredictive computation
When the encounter has been resolved ldquoClear of Con-flictrdquo (CoC) would be advised and the relevant information isstored in P9
322 Agent Predictive Computation This Agent predictivecomputation contains the part of exploring the complete statespace of the possible future situations This agent integrateswith Agent TCAS processor to obtain the related aircraft statewhich are in the respective CA process and Agent aircraftcrew to receive the impact of pilot behaviour This agentcontains six transitions
(i) T5 Neighbouring Threat Selection The neighbouringthreats would have an interrelationship that may leadto a new secondary conflict or even potential colli-sion Thus distance and time tests are implementedon the neighbouring threats (eg threat1 betweenAircraft 119894 andAircraft 119895 threat2 betweenAircraft 119896 andAircraft 119897)
11986312119905CPA
= radic(1199091119905CPAminus 119909
2119905CPA)2+ (119910
1119905CPAminus 119910
2119905CPA)2+ (119911
1119905CPAminus 119911
2119905CPA)2
le 119863narby
(12)
11987912119905CPA
=100381610038161003816100381610038161199051119905CPAminus 119905
2119905CPA
10038161003816100381610038161003816le 119879narby (13)
If the distance (11986312119905CPA
) and time (11987912119905CPA
) at CPA ofboth threats (threat1 and threat2)meet the dimensioncriteria (119863narby) and time threshold (119879narby) the rela-tionship is declared to be adjacent
(ii) T6 Resolution Waypoints Summary This transitionconsolidates the multiaircraft waypoints at the begin-ning of RA and records the pilot responses to advi-sories for the successive research of domino threat
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
119879119894119895
119905CPA ℎ=
minusradic(119909119894
119905minus 119909119895
119905)2
+ (119910119894
119905minus 119910119895
119905)2
radic(V119894119905119909minus V119895119905119909)2
+ (V119894119905119910minus V119895119905119910)2
sdot cos (120572119894119895119905minus 120573119894119895
119905)
cos120572119894119895119905= arctan(
V119894119905119909minus V119895119905119909
V119894119905119910minus V119895119905119910
)
cos120573119894119895119905= arctan(
119909119894
119905minus 119909119895
119905
119910119894
119905minus 119910119895
119905
)
119879119894119895
119905CPA 119911= minus
119911119894
119905minus 119911119895
119905
V119894119905119911minus V119895119905119911
119863119894119895
119905ℎ= radic(119909
119894
119905minus 119909119895
119905)2+ (119910119894
119905minus 119910119895
119905)2
119863119894119895
119905119911=10038161003816100381610038161003816119911119894
119905minus 119911119895
119905
10038161003816100381610038161003816
119863119894119895
119905CPA ℎ= radic[(119909
119894
119905+ V119894119905119909sdot 119879119894119895
119905CPA 119911)2minus (119909119895
119905+ V119895119905119909sdot 119879119894119895
119905CPA 119911)2] + [(119910
119894
119905+ V119894119905119910sdot 119879119894119895
119905CPA 119911)2minus (119910119895
119905+ V119895119905119910sdot 119879119894119895
119905CPA 119911)2]
119863119894119895
119905CPA 119911= radic[(119911
119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ)2minus (119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ)2]
(2)
Note that 119879119894119895119905CPA ℎ
(horizontal plane) and 119879119894119895119905CPA 119911
(verticalplane) are separately the time to the closest point of approach(CPA) Besides 120572119894119895
119905is defined as the direction angle of the
velocity difference vector while 120573119894119895
119905(120572119894119895119905minus 120573119894119895
119905= plusmn1205872)
indicates the direction angle of the position difference vector119863119894119895
119905ℎand 119863119894119895
119905119911indicate their distances in the horizontal and
vertical planes at time 119905119863119894119895119905ℎand119863119894119895
119905119911indicate their horizontal
and vertical distances at CPATo improve the computational efficiency only the TA
which would deteriorate into RA is considered in thisresearch The situation should meet the following set ofconditions
(0lt119879119894119895119905CPA ℎ
ltTimeTA) and (0lt119879119894119895
119905CPA 119911ltTimeTA)
and (119863119894119895
119905CPA ℎltDMODRA) and (119863
119894119895
119905CPA 119911ltZTHRRA)
(3)
An RA would be issued when
[(0lt119879119894119895119905ℎltTimeRA) and (0lt119879
119894119895
119905119911ltTimeRA)]
or [(119863119894119895
119905ℎltDMODRA) and (119863
119894119895
119905119911ltZTHRRA)]
(4)
where TimeRA [1] indicates the time to the CPA constraintwhile DMODRA and ZTHRRA [1] are separately the range andaltitude threshold When an RA occurs a two-step process isrequired to generate the appropriate advisories for resolvingconflicts [1] First the amending sense is obtained on accountof the predictive CPA altitude In terms of practicality each
aircraft has three choices (climbunchangeddescend) whenan RA is aroused Define 119862119894
119905RAas the possible selection of
Aircraft 119894 at 119905RA
119862119894
119905RA=
1 climb
0 unchanged
minus1 descend
(5)
ForAircraft 119894 andAircraft 119895which are involved in the samethreat their response combination 119862119894119895
119905RA= (119862119894
119905RA 119862119895
119905RA) can be
(1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1)Second the RA strength is calculated to provide adequate
separation between the involved aircraft at CPA Normallythe initial 119886
0= 025 g acceleration manoeuvre would be
adopted within 5 seconds [1]
119911119894
119905CPA ℎ= 119911119894
119905+ V119894119905119911sdot 119879119894119895
119905CPA ℎ
119911119895
119905CPAℎ= 119911119895
119905+ V119895119905119911sdot 119879119894119895
119905CPA ℎ
(6)
If 119862119894119895119905RA= (1 0) for Aircraft 119894 the appropriate amendment
strength should be
Δ119894
119905119911= ALIMRA + 119911
119894
119905CPAℎminus 119911119895
119905CPAℎ (7)
4 Mathematical Problems in Engineering
Additionally the acceleration time 1199051198941198860
of Aircraft 119894 meetsthe following formula
Δ119894
119905119911=
1198860119905119894
1198860
2
2+ 1198860119905119894
1198860(119879119894119895
119905CPA ℎminus 119905119894
1198860)
(8)
Thus
119905119894
1198860
= 119879119894119895
119905CPA ℎminusradic119879119894119895
119905CPA ℎ
2
minus2Δ119894
119905119911
1198860
(9)
For the other possible response combinations the calcu-lation process is similar
TCAS may induce a domino threat in high-density airtraffic For the secondary threat pilot response with 1198861 =035 g acceleration is set within 25 seconds [1] But a dominoconflict would deteriorate into an induced collision if the timeis not adequate Assume that Aircraft 119894 has a secondary threatwithAircraft 119895 If atmoment 119905
1198861
the diameter and height of thecollision volumes of both aircraft overlap a potential collisionwould emerge
119863119894119896
1199051198861
ℎ= radic(119909
119894
1199051198861
minus 119909119896
1199051198861
)
2+ (119910119894
1199051198861
minus 119910119896
1199051198861
)
2le 119863cl
119863119894119896
1199051198861 119911=100381610038161003816100381610038161003816119911119894
1199051198861minus 119911119896
1199051198861
100381610038161003816100381610038161003816le 119867cl
(10)
Here at time 1199051198861
1198631198941198961199051198861
ℎand 119863119894119896
1199051198861
119911separately indicate the
horizontal and vertical distances between the correspondingaircraft In this paper a vehicle is modeled as a unique point[3] that is surrounded by a 3D safety volume (cylinder) andtherefore a collision will break out when the diameter andheight criteria (119863cl and119867cl) are violated simultaneously
Because of the possible selections (climbunchangeddescend) of each aircraft when an RA fires there would bea great deal of future states that a scenario could emerge fromcurrent state in a multiaircraft scenario
3 Causal Analysis Model in CPN Formalism
In this section the causal analysis model to improve theTCAS avoidance performance is modelled discretely to con-sider the continuous dynamics Based on CPN [11] it aimsto generate all the future possible states and screen out thepotential collision states that should be forcibly avoided
31 Coloured Petri Net CPN is an effective modelling for-malism for multiple complex systems and it has been widelyutilized to realize and verify systems representing not onlythe static behaviour and system dynamics but also theinformation flow [12] CPN is used as a graphical languagewhich combines the capabilities of a Petri net (PN) [13]with the advantages of an effective programming languagemodelling concurrent systems and analysing their properties
Definition 1 A nonhierarchical CPN is a nine-tuple [14]
CPN = (Σ 119875 119879 119860119873 119862 119866 119864 119868) (11)
where
(i) Σ = 1198621 1198622 119862nc represent the finite set ofcolours
(ii) 119875 = 1198751 1198752 119875np represent the finite set of placenodes
(iii) 119879 = 1198791 1198792 119879nt represent the set of transitionnodes 119875 cap 119879 =
(iv) 119860 = 1198601 1198602 119860na represent the directed arc set119860 sube 119875 times 119879 cup 119879 times 119875
(v) 119873 = the node function119873(119860119894) related with the input
and output arcs(vi) 119862 = the colour set functions 119862(119875
119894) specifying the
combination of colours for each place 119875 rarr Σ(vii) 119866 = the guard function 119866(119879
119894) which is associated
with transition nodes and normally used to inhibitthe event relatedwith the transition upon the attributevalues of the processed entities
(viii) 119864 = the arc expressions 119864(119860119894) which specify the
quantity and type of entities that can be selectedamong the ones present in the place node to enablethe transition
(ix) 119868 = the initialization function 119868(119875119894) allowing the value
specification for the initial entities in the places
Note that the state space analysis tool [15 16] of CPNcan be used to explore the systemsrsquo dynamic and to representall the reachable future state It is depicted by means of thereachability tree (also called occurrence graph)
Figure 1 illustrates the first level of a reachability treeand the state vector of the transition (1198794 of the causalencounter model described in Figure 2) with 3 places isrepresented In each position of the vector the tokensand their colours that are stored in each place node arerepresented Given this initial marking (11987510 11015840(5) 1198751111015840(1 0) + 1
1015840(1 minus1) + 1
1015840(0 1) + 1
1015840(0 minus1) + 1
1015840(minus1 0) +
11015840(minus1 1)) the only enabled events are those indicated by
T4 In addition T4 has six different combinations of tokens11015840(1 0) climbunchanged 11015840(1 minus1) climbdescend 11015840(0 1)
unchangedclimb 11015840(0 minus1) unchangeddescend 11015840(minus1 0)descendunchanged 11015840(minus1 1) descendclimbThe result of atransition corresponds to a new state vector (ie a new trafficscenario) And therefore CPN model can generate the wholestate space of a complex system without any extra behaviourin the simulation [17]
The reachability tree of theCAoperations applied to a cer-tain scenario allows us to comprehend the cause-effect rela-tionship of each system action and how the effects are spreaddownstream In essence the analysis problem becomes asearch problem in which the ATM can clearly determine theaircraftmanoeuvres that could lead to potential collisions andprovide feasible (or even optimal) advisories to the involvedpilots It is used as a causal analysis model to improve theTCAS avoidance performance in dense air traffic
32 Causal TCASModel Abundant research of TCAS weak-nesses explains that even with TCAS onboard an induced
Mathematical Problems in Engineering 5
P10 P11 P12
P10 P11 P12
P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12
T4T4
Root
Level 1
T4T4T4T4
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(0 1 5)1998400(1 0 5) 1998400(1 minus1 5) 1998400(0 minus1 5) 1998400(minus1 0 5) 1998400(minus1 1 5)
Figure 1 An example of reachability tree
collision also could emerge especially in the dense air traffic[2ndash9]Therefore based on themathematicalmodel presentedin the previous section a causal analysis model in CPNformalism is critical for the CA process of multiple aircraftNote that it is complementary to the widely used TCAS smartchanges in its logic
The proposed CPNmodel considers situations that occurin a short period of time with a local scope which resultsin the rectilinear motion of the aircraft from a simplifiedview Besides the local airspace that the multiple aircraftare involved in can be modelled as a Euclidean 3D spaceA Cartesian coordinate system [2] is used to represent theplanar projection of the Earth with minimum distortion [3]If the initial positions and speeds of the involved aircraftare known the sequence of following waypoints forming thepartial trajectories in local airspace can be easily calculated
The proposed CPN model has been depicted usingfourteen colours twenty-three places and ten transitionsFigure 2 illustrates the causal analysis model described inCPN and it includes three kinds of agents (Agent TCASprocessor Agent predictive computation and Agent aircraftcrew) that are modelled for the causal analysis
321 Agent TCAS Processor As is depicted in Figure 2 theAgent TCAS processor contains the part of carrying out theTCAS operations This agent contains three transitions
(i) T1 Sensitivity Level (SL) [1] Evaluation Different SLscorrespond to different TA and RA thresholds and SLis determined based on their flight altitudes
(ii) T2 Threat Detection The TA is issued when anotheraircraft approaches and a collision would emergewithin 20ndash48 s (variables are provided in P5) onaccount of the SL It tries to draw the pilotrsquos attentionand calculates the CPA to inform Agent predictivecomputation
(iii) T3 Threat Resolution TCAS issues the RA whena collision would emerge within 15ndash35 s (variablesare provided in P7) that is depending on the SLWith the communication of Agent aircraft crew theRA could be active (climb and descend) or passive
(not climb and not descend) In order to explore thepossible future situations this transition also servesto transmit RA waypoint information to the Agentpredictive computation
When the encounter has been resolved ldquoClear of Con-flictrdquo (CoC) would be advised and the relevant information isstored in P9
322 Agent Predictive Computation This Agent predictivecomputation contains the part of exploring the complete statespace of the possible future situations This agent integrateswith Agent TCAS processor to obtain the related aircraft statewhich are in the respective CA process and Agent aircraftcrew to receive the impact of pilot behaviour This agentcontains six transitions
(i) T5 Neighbouring Threat Selection The neighbouringthreats would have an interrelationship that may leadto a new secondary conflict or even potential colli-sion Thus distance and time tests are implementedon the neighbouring threats (eg threat1 betweenAircraft 119894 andAircraft 119895 threat2 betweenAircraft 119896 andAircraft 119897)
11986312119905CPA
= radic(1199091119905CPAminus 119909
2119905CPA)2+ (119910
1119905CPAminus 119910
2119905CPA)2+ (119911
1119905CPAminus 119911
2119905CPA)2
le 119863narby
(12)
11987912119905CPA
=100381610038161003816100381610038161199051119905CPAminus 119905
2119905CPA
10038161003816100381610038161003816le 119879narby (13)
If the distance (11986312119905CPA
) and time (11987912119905CPA
) at CPA ofboth threats (threat1 and threat2)meet the dimensioncriteria (119863narby) and time threshold (119879narby) the rela-tionship is declared to be adjacent
(ii) T6 Resolution Waypoints Summary This transitionconsolidates the multiaircraft waypoints at the begin-ning of RA and records the pilot responses to advi-sories for the successive research of domino threat
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Additionally the acceleration time 1199051198941198860
of Aircraft 119894 meetsthe following formula
Δ119894
119905119911=
1198860119905119894
1198860
2
2+ 1198860119905119894
1198860(119879119894119895
119905CPA ℎminus 119905119894
1198860)
(8)
Thus
119905119894
1198860
= 119879119894119895
119905CPA ℎminusradic119879119894119895
119905CPA ℎ
2
minus2Δ119894
119905119911
1198860
(9)
For the other possible response combinations the calcu-lation process is similar
TCAS may induce a domino threat in high-density airtraffic For the secondary threat pilot response with 1198861 =035 g acceleration is set within 25 seconds [1] But a dominoconflict would deteriorate into an induced collision if the timeis not adequate Assume that Aircraft 119894 has a secondary threatwithAircraft 119895 If atmoment 119905
1198861
the diameter and height of thecollision volumes of both aircraft overlap a potential collisionwould emerge
119863119894119896
1199051198861
ℎ= radic(119909
119894
1199051198861
minus 119909119896
1199051198861
)
2+ (119910119894
1199051198861
minus 119910119896
1199051198861
)
2le 119863cl
119863119894119896
1199051198861 119911=100381610038161003816100381610038161003816119911119894
1199051198861minus 119911119896
1199051198861
100381610038161003816100381610038161003816le 119867cl
(10)
Here at time 1199051198861
1198631198941198961199051198861
ℎand 119863119894119896
1199051198861
119911separately indicate the
horizontal and vertical distances between the correspondingaircraft In this paper a vehicle is modeled as a unique point[3] that is surrounded by a 3D safety volume (cylinder) andtherefore a collision will break out when the diameter andheight criteria (119863cl and119867cl) are violated simultaneously
Because of the possible selections (climbunchangeddescend) of each aircraft when an RA fires there would bea great deal of future states that a scenario could emerge fromcurrent state in a multiaircraft scenario
3 Causal Analysis Model in CPN Formalism
In this section the causal analysis model to improve theTCAS avoidance performance is modelled discretely to con-sider the continuous dynamics Based on CPN [11] it aimsto generate all the future possible states and screen out thepotential collision states that should be forcibly avoided
31 Coloured Petri Net CPN is an effective modelling for-malism for multiple complex systems and it has been widelyutilized to realize and verify systems representing not onlythe static behaviour and system dynamics but also theinformation flow [12] CPN is used as a graphical languagewhich combines the capabilities of a Petri net (PN) [13]with the advantages of an effective programming languagemodelling concurrent systems and analysing their properties
Definition 1 A nonhierarchical CPN is a nine-tuple [14]
CPN = (Σ 119875 119879 119860119873 119862 119866 119864 119868) (11)
where
(i) Σ = 1198621 1198622 119862nc represent the finite set ofcolours
(ii) 119875 = 1198751 1198752 119875np represent the finite set of placenodes
(iii) 119879 = 1198791 1198792 119879nt represent the set of transitionnodes 119875 cap 119879 =
(iv) 119860 = 1198601 1198602 119860na represent the directed arc set119860 sube 119875 times 119879 cup 119879 times 119875
(v) 119873 = the node function119873(119860119894) related with the input
and output arcs(vi) 119862 = the colour set functions 119862(119875
119894) specifying the
combination of colours for each place 119875 rarr Σ(vii) 119866 = the guard function 119866(119879
119894) which is associated
with transition nodes and normally used to inhibitthe event relatedwith the transition upon the attributevalues of the processed entities
(viii) 119864 = the arc expressions 119864(119860119894) which specify the
quantity and type of entities that can be selectedamong the ones present in the place node to enablethe transition
(ix) 119868 = the initialization function 119868(119875119894) allowing the value
specification for the initial entities in the places
Note that the state space analysis tool [15 16] of CPNcan be used to explore the systemsrsquo dynamic and to representall the reachable future state It is depicted by means of thereachability tree (also called occurrence graph)
Figure 1 illustrates the first level of a reachability treeand the state vector of the transition (1198794 of the causalencounter model described in Figure 2) with 3 places isrepresented In each position of the vector the tokensand their colours that are stored in each place node arerepresented Given this initial marking (11987510 11015840(5) 1198751111015840(1 0) + 1
1015840(1 minus1) + 1
1015840(0 1) + 1
1015840(0 minus1) + 1
1015840(minus1 0) +
11015840(minus1 1)) the only enabled events are those indicated by
T4 In addition T4 has six different combinations of tokens11015840(1 0) climbunchanged 11015840(1 minus1) climbdescend 11015840(0 1)
unchangedclimb 11015840(0 minus1) unchangeddescend 11015840(minus1 0)descendunchanged 11015840(minus1 1) descendclimbThe result of atransition corresponds to a new state vector (ie a new trafficscenario) And therefore CPN model can generate the wholestate space of a complex system without any extra behaviourin the simulation [17]
The reachability tree of theCAoperations applied to a cer-tain scenario allows us to comprehend the cause-effect rela-tionship of each system action and how the effects are spreaddownstream In essence the analysis problem becomes asearch problem in which the ATM can clearly determine theaircraftmanoeuvres that could lead to potential collisions andprovide feasible (or even optimal) advisories to the involvedpilots It is used as a causal analysis model to improve theTCAS avoidance performance in dense air traffic
32 Causal TCASModel Abundant research of TCAS weak-nesses explains that even with TCAS onboard an induced
Mathematical Problems in Engineering 5
P10 P11 P12
P10 P11 P12
P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12
T4T4
Root
Level 1
T4T4T4T4
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(0 1 5)1998400(1 0 5) 1998400(1 minus1 5) 1998400(0 minus1 5) 1998400(minus1 0 5) 1998400(minus1 1 5)
Figure 1 An example of reachability tree
collision also could emerge especially in the dense air traffic[2ndash9]Therefore based on themathematicalmodel presentedin the previous section a causal analysis model in CPNformalism is critical for the CA process of multiple aircraftNote that it is complementary to the widely used TCAS smartchanges in its logic
The proposed CPNmodel considers situations that occurin a short period of time with a local scope which resultsin the rectilinear motion of the aircraft from a simplifiedview Besides the local airspace that the multiple aircraftare involved in can be modelled as a Euclidean 3D spaceA Cartesian coordinate system [2] is used to represent theplanar projection of the Earth with minimum distortion [3]If the initial positions and speeds of the involved aircraftare known the sequence of following waypoints forming thepartial trajectories in local airspace can be easily calculated
The proposed CPN model has been depicted usingfourteen colours twenty-three places and ten transitionsFigure 2 illustrates the causal analysis model described inCPN and it includes three kinds of agents (Agent TCASprocessor Agent predictive computation and Agent aircraftcrew) that are modelled for the causal analysis
321 Agent TCAS Processor As is depicted in Figure 2 theAgent TCAS processor contains the part of carrying out theTCAS operations This agent contains three transitions
(i) T1 Sensitivity Level (SL) [1] Evaluation Different SLscorrespond to different TA and RA thresholds and SLis determined based on their flight altitudes
(ii) T2 Threat Detection The TA is issued when anotheraircraft approaches and a collision would emergewithin 20ndash48 s (variables are provided in P5) onaccount of the SL It tries to draw the pilotrsquos attentionand calculates the CPA to inform Agent predictivecomputation
(iii) T3 Threat Resolution TCAS issues the RA whena collision would emerge within 15ndash35 s (variablesare provided in P7) that is depending on the SLWith the communication of Agent aircraft crew theRA could be active (climb and descend) or passive
(not climb and not descend) In order to explore thepossible future situations this transition also servesto transmit RA waypoint information to the Agentpredictive computation
When the encounter has been resolved ldquoClear of Con-flictrdquo (CoC) would be advised and the relevant information isstored in P9
322 Agent Predictive Computation This Agent predictivecomputation contains the part of exploring the complete statespace of the possible future situations This agent integrateswith Agent TCAS processor to obtain the related aircraft statewhich are in the respective CA process and Agent aircraftcrew to receive the impact of pilot behaviour This agentcontains six transitions
(i) T5 Neighbouring Threat Selection The neighbouringthreats would have an interrelationship that may leadto a new secondary conflict or even potential colli-sion Thus distance and time tests are implementedon the neighbouring threats (eg threat1 betweenAircraft 119894 andAircraft 119895 threat2 betweenAircraft 119896 andAircraft 119897)
11986312119905CPA
= radic(1199091119905CPAminus 119909
2119905CPA)2+ (119910
1119905CPAminus 119910
2119905CPA)2+ (119911
1119905CPAminus 119911
2119905CPA)2
le 119863narby
(12)
11987912119905CPA
=100381610038161003816100381610038161199051119905CPAminus 119905
2119905CPA
10038161003816100381610038161003816le 119879narby (13)
If the distance (11986312119905CPA
) and time (11987912119905CPA
) at CPA ofboth threats (threat1 and threat2)meet the dimensioncriteria (119863narby) and time threshold (119879narby) the rela-tionship is declared to be adjacent
(ii) T6 Resolution Waypoints Summary This transitionconsolidates the multiaircraft waypoints at the begin-ning of RA and records the pilot responses to advi-sories for the successive research of domino threat
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
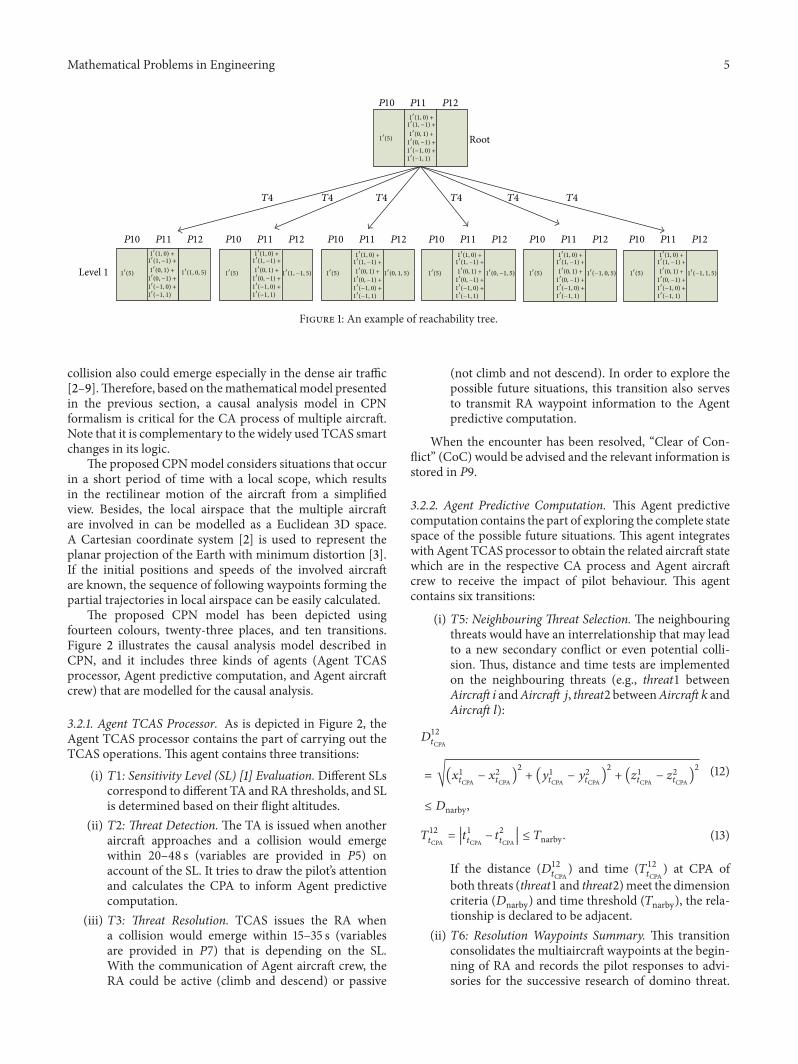
Mathematical Problems in Engineering 5
P10 P11 P12
P10 P11 P12
P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12 P10 P11 P12
T4T4
Root
Level 1
T4T4T4T4
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(5)
1998400(1 0) +1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +1998400(minus1 1)
1998400(0 1 5)1998400(1 0 5) 1998400(1 minus1 5) 1998400(0 minus1 5) 1998400(minus1 0 5) 1998400(minus1 1 5)
Figure 1 An example of reachability tree
collision also could emerge especially in the dense air traffic[2ndash9]Therefore based on themathematicalmodel presentedin the previous section a causal analysis model in CPNformalism is critical for the CA process of multiple aircraftNote that it is complementary to the widely used TCAS smartchanges in its logic
The proposed CPNmodel considers situations that occurin a short period of time with a local scope which resultsin the rectilinear motion of the aircraft from a simplifiedview Besides the local airspace that the multiple aircraftare involved in can be modelled as a Euclidean 3D spaceA Cartesian coordinate system [2] is used to represent theplanar projection of the Earth with minimum distortion [3]If the initial positions and speeds of the involved aircraftare known the sequence of following waypoints forming thepartial trajectories in local airspace can be easily calculated
The proposed CPN model has been depicted usingfourteen colours twenty-three places and ten transitionsFigure 2 illustrates the causal analysis model described inCPN and it includes three kinds of agents (Agent TCASprocessor Agent predictive computation and Agent aircraftcrew) that are modelled for the causal analysis
321 Agent TCAS Processor As is depicted in Figure 2 theAgent TCAS processor contains the part of carrying out theTCAS operations This agent contains three transitions
(i) T1 Sensitivity Level (SL) [1] Evaluation Different SLscorrespond to different TA and RA thresholds and SLis determined based on their flight altitudes
(ii) T2 Threat Detection The TA is issued when anotheraircraft approaches and a collision would emergewithin 20ndash48 s (variables are provided in P5) onaccount of the SL It tries to draw the pilotrsquos attentionand calculates the CPA to inform Agent predictivecomputation
(iii) T3 Threat Resolution TCAS issues the RA whena collision would emerge within 15ndash35 s (variablesare provided in P7) that is depending on the SLWith the communication of Agent aircraft crew theRA could be active (climb and descend) or passive
(not climb and not descend) In order to explore thepossible future situations this transition also servesto transmit RA waypoint information to the Agentpredictive computation
When the encounter has been resolved ldquoClear of Con-flictrdquo (CoC) would be advised and the relevant information isstored in P9
322 Agent Predictive Computation This Agent predictivecomputation contains the part of exploring the complete statespace of the possible future situations This agent integrateswith Agent TCAS processor to obtain the related aircraft statewhich are in the respective CA process and Agent aircraftcrew to receive the impact of pilot behaviour This agentcontains six transitions
(i) T5 Neighbouring Threat Selection The neighbouringthreats would have an interrelationship that may leadto a new secondary conflict or even potential colli-sion Thus distance and time tests are implementedon the neighbouring threats (eg threat1 betweenAircraft 119894 andAircraft 119895 threat2 betweenAircraft 119896 andAircraft 119897)
11986312119905CPA
= radic(1199091119905CPAminus 119909
2119905CPA)2+ (119910
1119905CPAminus 119910
2119905CPA)2+ (119911
1119905CPAminus 119911
2119905CPA)2
le 119863narby
(12)
11987912119905CPA
=100381610038161003816100381610038161199051119905CPAminus 119905
2119905CPA
10038161003816100381610038161003816le 119879narby (13)
If the distance (11986312119905CPA
) and time (11987912119905CPA
) at CPA ofboth threats (threat1 and threat2)meet the dimensioncriteria (119863narby) and time threshold (119879narby) the rela-tionship is declared to be adjacent
(ii) T6 Resolution Waypoints Summary This transitionconsolidates the multiaircraft waypoints at the begin-ning of RA and records the pilot responses to advi-sories for the successive research of domino threat
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
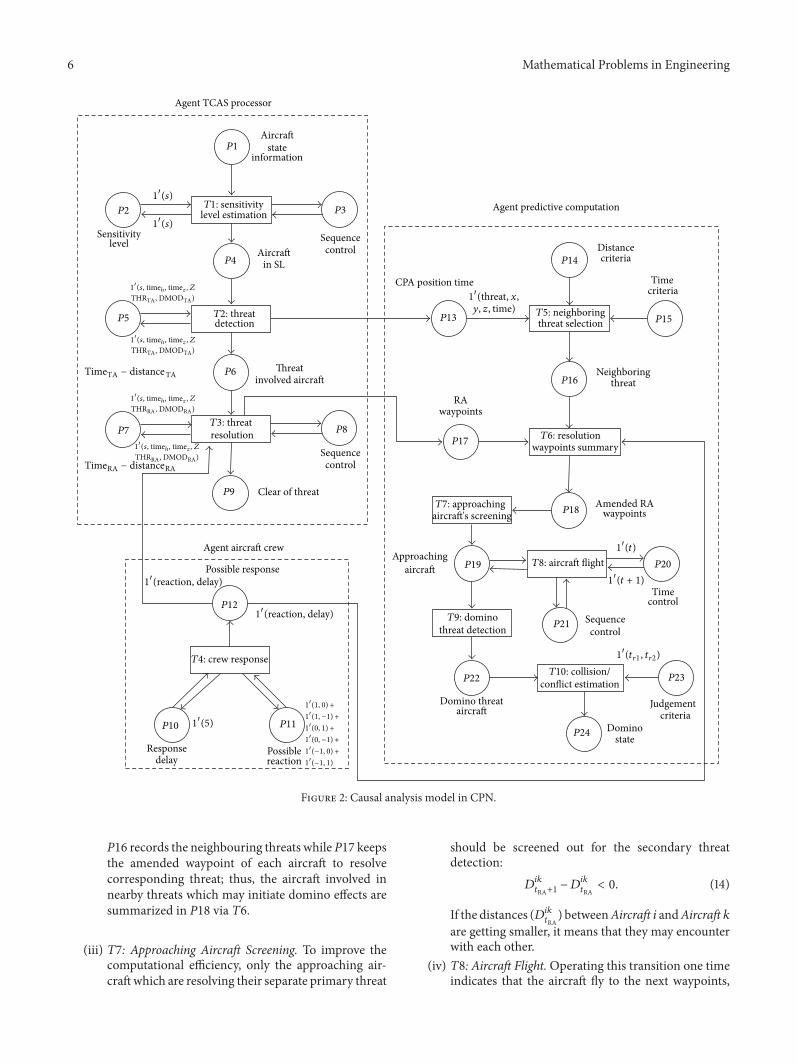
6 Mathematical Problems in Engineering
CPA position time
RAwaypoints
T7 approachingaircrafts screening
Approachingaircraft
T9 dominothreat detection
Domino threataircraft
Timecriteria
Neighboringthreat
T6 resolutionwaypoints summary
Amended RAwaypoints
T8 aircraft flight
Timecontrol
Sequencecontrol
Judgementcriteria
Dominostate
1998400(threat xy z time) T5 neighboring
threat selection
T10 collisionconflict estimation
Agent aircraft crew
Possible response1998400(reaction delay)
1998400(reaction delay)
T4 crew response
Responsedelay
Possiblereaction
Agent TCAS processor
Agent predictive computation1998400(s)
1998400(s)
Distancecriteria
T3 threatresolution
Clear of threat
Sensitivitylevel
Aircraftstate
information
T1 sensitivitylevel estimation
Aircraftin SL
Sequencecontrol
Sequencecontrol
T2 threatdetection
THRTA DMODTA)1998400(s timeh timez Z
THRTA DMODTA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
THRRA DMODRA)1998400(s timeh timez Z
TimeTA minus distanceTA
TimeRA minus distanceRA
Threatinvolved aircraft
P1
P2 P3
P4
P5
P6
P7 P8
P9
P10 P11
P12
P13
P14
P15
P16
P17
P18
P19 P20
P21
P22 P23
P24
1998400(t)
1998400(t + 1)
1998400(5)
1998400(1 0) +
1998400(1 minus1) +
1998400(0 1) +
1998400(0 minus1) +
1998400(minus1 0) +
1998400(minus1 1)
1998400(tr1 tr2)
Figure 2 Causal analysis model in CPN
P16 records the neighbouring threats while P17 keepsthe amended waypoint of each aircraft to resolvecorresponding threat thus the aircraft involved innearby threats which may initiate domino effects aresummarized in P18 via T6
(iii) T7 Approaching Aircraft Screening To improve thecomputational efficiency only the approaching air-craftwhich are resolving their separate primary threat
should be screened out for the secondary threatdetection
119863119894119896
119905RA+1 minus119863119894119896
119905RAlt 0 (14)
If the distances (119863119894119896119905RA
) betweenAircraft 119894 andAircraft 119896are getting smaller it means that they may encounterwith each other
(iv) T8 Aircraft FlightOperating this transition one timeindicates that the aircraft fly to the next waypoints
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
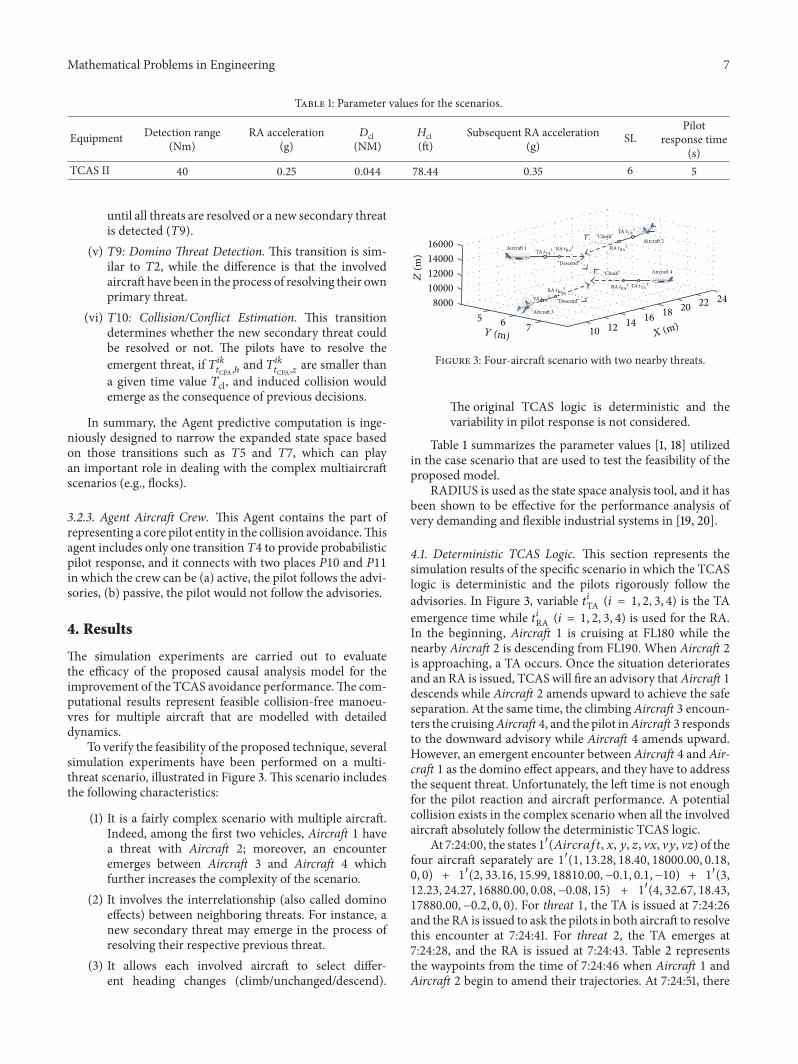
Mathematical Problems in Engineering 7
Table 1 Parameter values for the scenarios
Equipment Detection range(Nm)
RA acceleration(g)
119863cl(NM)
119867cl(ft)
Subsequent RA acceleration(g) SL
Pilotresponse time
(s)TCAS II 40 025 0044 7844 035 6 5
until all threats are resolved or a new secondary threatis detected (T9)
(v) T9 Domino Threat Detection This transition is sim-ilar to T2 while the difference is that the involvedaircrafthave been in the process of resolving their ownprimary threat
(vi) T10 CollisionConflict Estimation This transitiondetermines whether the new secondary threat couldbe resolved or not The pilots have to resolve theemergent threat if 119879119894119896
119905CPA ℎand 119879119894119896
119905CPA 119911are smaller than
a given time value 119879cl and induced collision wouldemerge as the consequence of previous decisions
In summary the Agent predictive computation is inge-niously designed to narrow the expanded state space basedon those transitions such as T5 and T7 which can playan important role in dealing with the complex multiaircraftscenarios (eg flocks)
323 Agent Aircraft Crew This Agent contains the part ofrepresenting a core pilot entity in the collision avoidanceThisagent includes only one transition T4 to provide probabilisticpilot response and it connects with two places P10 and P11in which the crew can be (a) active the pilot follows the advi-sories (b) passive the pilot would not follow the advisories
4 Results
The simulation experiments are carried out to evaluatethe efficacy of the proposed causal analysis model for theimprovement of the TCAS avoidance performanceThe com-putational results represent feasible collision-free manoeu-vres for multiple aircraft that are modelled with detaileddynamics
To verify the feasibility of the proposed technique severalsimulation experiments have been performed on a multi-threat scenario illustrated in Figure 3 This scenario includesthe following characteristics
(1) It is a fairly complex scenario with multiple aircraftIndeed among the first two vehicles Aircraft 1 havea threat with Aircraft 2 moreover an encounteremerges between Aircraft 3 and Aircraft 4 whichfurther increases the complexity of the scenario
(2) It involves the interrelationship (also called dominoeffects) between neighboring threats For instance anew secondary threat may emerge in the process ofresolving their respective previous threat
(3) It allows each involved aircraft to select differ-ent heading changes (climbunchangeddescend)
RA tRA1
TA tTA1 RA tRA
2
RA tRA4
TA tTA2
TA tTA4
RA tRA3
TA tTA3
ldquoDescendrdquo
ldquoDescendrdquoAircraft 4
Aircraft 3
Aircraft 1
Aircraft 2
ldquoClimbrdquo
ldquoClimbrdquo
16000
14000
12000
10000
8000
Z (m
)
5 67Y (m) 10 12 14
1618 20 22 24
X (m)
Figure 3 Four-aircraft scenario with two nearby threats
The original TCAS logic is deterministic and thevariability in pilot response is not considered
Table 1 summarizes the parameter values [1 18] utilizedin the case scenario that are used to test the feasibility of theproposed model
RADIUS is used as the state space analysis tool and it hasbeen shown to be effective for the performance analysis ofvery demanding and flexible industrial systems in [19 20]
41 Deterministic TCAS Logic This section represents thesimulation results of the specific scenario in which the TCASlogic is deterministic and the pilots rigorously follow theadvisories In Figure 3 variable 119905119894TA (119894 = 1 2 3 4) is the TAemergence time while 119905119894RA (119894 = 1 2 3 4) is used for the RAIn the beginning Aircraft 1 is cruising at FL180 while thenearby Aircraft 2 is descending from FL190 When Aircraft 2is approaching a TA occurs Once the situation deterioratesand an RA is issued TCAS will fire an advisory thatAircraft 1descends while Aircraft 2 amends upward to achieve the safeseparation At the same time the climbingAircraft 3 encoun-ters the cruisingAircraft 4 and the pilot inAircraft 3 respondsto the downward advisory while Aircraft 4 amends upwardHowever an emergent encounter between Aircraft 4 and Air-craft 1 as the domino effect appears and they have to addressthe sequent threat Unfortunately the left time is not enoughfor the pilot reaction and aircraft performance A potentialcollision exists in the complex scenario when all the involvedaircraft absolutely follow the deterministic TCAS logic
At 72400 the states 11015840(119860119894119903119888119903119886119891119905 119909 119910 119911 V119909 V119910 V119911) of thefour aircraft separately are 11015840(1 1328 1840 1800000 0180 0) + 1
1015840(2 3316 1599 1881000 minus01 01 minus10) + 1
1015840(3
1223 2427 1688000 008 minus008 15) + 11015840(4 3267 1843
1788000 minus02 0 0) For threat 1 the TA is issued at 72426and the RA is issued to ask the pilots in both aircraft to resolvethis encounter at 72441 For threat 2 the TA emerges at72428 and the RA is issued at 72443 Table 2 representsthe waypoints from the time of 72446 when Aircraft 1 andAircraft 2 begin to amend their trajectories At 72451 there
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
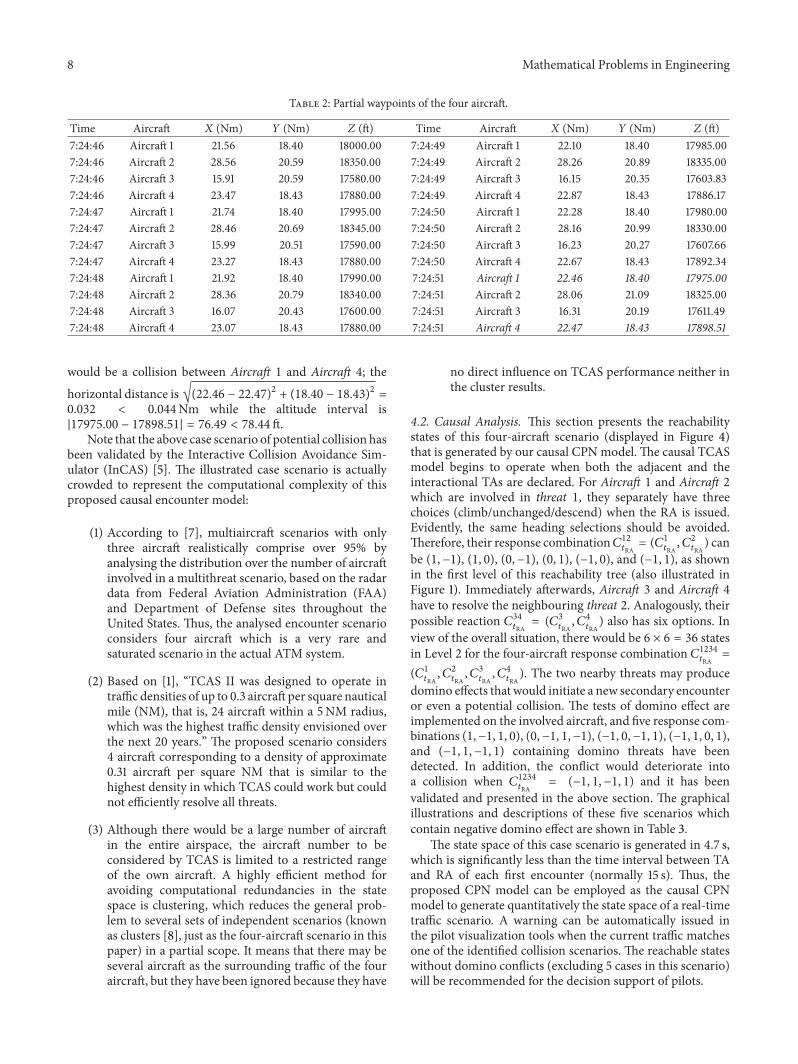
8 Mathematical Problems in Engineering
Table 2 Partial waypoints of the four aircraft
Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft) Time Aircraft 119883 (Nm) 119884 (Nm) 119885 (ft)72446 Aircraft 1 2156 1840 1800000 72449 Aircraft 1 2210 1840 179850072446 Aircraft 2 2856 2059 1835000 72449 Aircraft 2 2826 2089 183350072446 Aircraft 3 1591 2059 1758000 72449 Aircraft 3 1615 2035 176038372446 Aircraft 4 2347 1843 1788000 72449 Aircraft 4 2287 1843 178861772447 Aircraft 1 2174 1840 1799500 72450 Aircraft 1 2228 1840 179800072447 Aircraft 2 2846 2069 1834500 72450 Aircraft 2 2816 2099 183300072447 Aircraft 3 1599 2051 1759000 72450 Aircraft 3 1623 2027 176076672447 Aircraft 4 2327 1843 1788000 72450 Aircraft 4 2267 1843 178923472448 Aircraft 1 2192 1840 1799000 72451 Aircraft 1 2246 1840 179750072448 Aircraft 2 2836 2079 1834000 72451 Aircraft 2 2806 2109 183250072448 Aircraft 3 1607 2043 1760000 72451 Aircraft 3 1631 2019 176114972448 Aircraft 4 2307 1843 1788000 72451 Aircraft 4 2247 1843 1789851
would be a collision between Aircraft 1 and Aircraft 4 thehorizontal distance isradic(2246 minus 2247)2 + (1840 minus 1843)2 =0032 lt 0044Nm while the altitude interval is|1797500 minus 1789851| = 7649 lt 7844 ft
Note that the above case scenario of potential collision hasbeen validated by the Interactive Collision Avoidance Sim-ulator (InCAS) [5] The illustrated case scenario is actuallycrowded to represent the computational complexity of thisproposed causal encounter model
(1) According to [7] multiaircraft scenarios with onlythree aircraft realistically comprise over 95 byanalysing the distribution over the number of aircraftinvolved in a multithreat scenario based on the radardata from Federal Aviation Administration (FAA)and Department of Defense sites throughout theUnited States Thus the analysed encounter scenarioconsiders four aircraft which is a very rare andsaturated scenario in the actual ATM system
(2) Based on [1] ldquoTCAS II was designed to operate intraffic densities of up to 03 aircraft per square nauticalmile (NM) that is 24 aircraft within a 5NM radiuswhich was the highest traffic density envisioned overthe next 20 yearsrdquo The proposed scenario considers4 aircraft corresponding to a density of approximate031 aircraft per square NM that is similar to thehighest density in which TCAS could work but couldnot efficiently resolve all threats
(3) Although there would be a large number of aircraftin the entire airspace the aircraft number to beconsidered by TCAS is limited to a restricted rangeof the own aircraft A highly efficient method foravoiding computational redundancies in the statespace is clustering which reduces the general prob-lem to several sets of independent scenarios (knownas clusters [8] just as the four-aircraft scenario in thispaper) in a partial scope It means that there may beseveral aircraft as the surrounding traffic of the fouraircraft but they have been ignored because they have
no direct influence on TCAS performance neither inthe cluster results
42 Causal Analysis This section presents the reachabilitystates of this four-aircraft scenario (displayed in Figure 4)that is generated by our causal CPNmodel The causal TCASmodel begins to operate when both the adjacent and theinteractional TAs are declared For Aircraft 1 and Aircraft 2which are involved in threat 1 they separately have threechoices (climbunchangeddescend) when the RA is issuedEvidently the same heading selections should be avoidedTherefore their response combination11986212
119905RA= (119862
1119905RA 119862
2119905RA) can
be (1 minus1) (1 0) (0 minus1) (0 1) (minus1 0) and (minus1 1) as shownin the first level of this reachability tree (also illustrated inFigure 1) Immediately afterwards Aircraft 3 and Aircraft 4have to resolve the neighbouring threat 2 Analogously theirpossible reaction 11986234
119905RA= (119862
3119905RA 119862
4119905RA) also has six options In
view of the overall situation there would be 6 times 6 = 36 statesin Level 2 for the four-aircraft response combination 1198621234
119905RA=
(1198621119905RA 119862
2119905RA 119862
3119905RA 119862
4119905RA) The two nearby threats may produce
domino effects that would initiate a new secondary encounteror even a potential collision The tests of domino effect areimplemented on the involved aircraft and five response com-binations (1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1)and (minus1 1 minus1 1) containing domino threats have beendetected In addition the conflict would deteriorate intoa collision when 1198621234
119905RA= (minus1 1 minus1 1) and it has been
validated and presented in the above section The graphicalillustrations and descriptions of these five scenarios whichcontain negative domino effect are shown in Table 3
The state space of this case scenario is generated in 47 swhich is significantly less than the time interval between TAand RA of each first encounter (normally 15 s) Thus theproposed CPN model can be employed as the causal CPNmodel to generate quantitatively the state space of a real-timetraffic scenario A warning can be automatically issued inthe pilot visualization tools when the current traffic matchesone of the identified collision scenarios The reachable stateswithout domino conflicts (excluding 5 cases in this scenario)will be recommended for the decision support of pilots
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
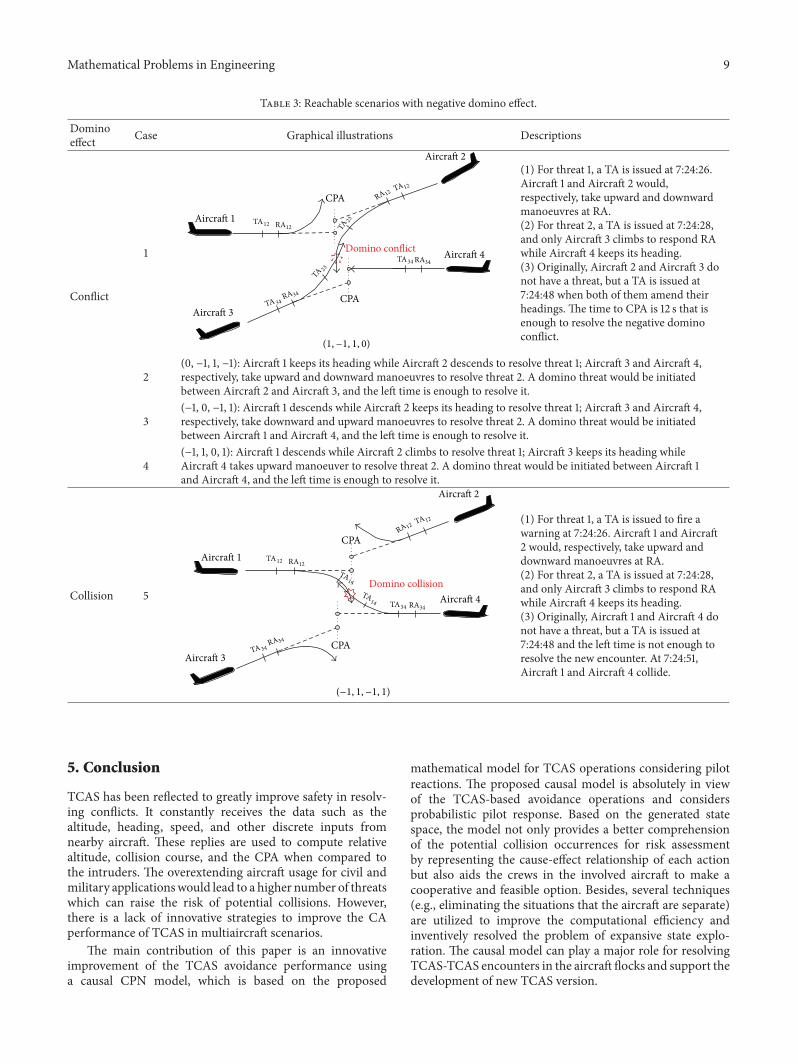
Mathematical Problems in Engineering 9
Table 3 Reachable scenarios with negative domino effect
Dominoeffect Case Graphical illustrations Descriptions
Conflict
1
Aircraft 1
CPA
CPA
Aircraft 2
Aircraft 3
Aircraft 4
TA12
TA 34
RA12
RA34
TA34 RA34
TA 23
TA23
RA 12 TA 12
Domino conflict
(1 minus1 1 0)
(1) For threat 1 a TA is issued at 72426Aircraft 1 and Aircraft 2 wouldrespectively take upward and downwardmanoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 2 and Aircraft 3 donot have a threat but a TA is issued at72448 when both of them amend theirheadings The time to CPA is 12 s that isenough to resolve the negative dominoconflict
2(0 minus1 1 minus1) Aircraft 1 keeps its heading while Aircraft 2 descends to resolve threat 1 Aircraft 3 and Aircraft 4respectively take upward and downward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 2 and Aircraft 3 and the left time is enough to resolve it
3(minus1 0 minus1 1) Aircraft 1 descends while Aircraft 2 keeps its heading to resolve threat 1 Aircraft 3 and Aircraft 4respectively take downward and upward manoeuvres to resolve threat 2 A domino threat would be initiatedbetween Aircraft 1 and Aircraft 4 and the left time is enough to resolve it
4(minus1 1 0 1) Aircraft 1 descends while Aircraft 2 climbs to resolve threat 1 Aircraft 3 keeps its heading whileAircraft 4 takes upward manoeuver to resolve threat 2 A domino threat would be initiated between Aircraft 1and Aircraft 4 and the left time is enough to resolve it
Collision 5
Aircraft 1
Aircraft 2
Aircraft 3
Aircraft 4
CPA
CPATA12
TA 34
RA12
RA34
TA34 RA34
TA14
TA14
RA 12 TA 12
Domino collision
(minus1 1 minus1 1)
(1) For threat 1 a TA is issued to fire awarning at 72426 Aircraft 1 and Aircraft2 would respectively take upward anddownward manoeuvres at RA(2) For threat 2 a TA is issued at 72428and only Aircraft 3 climbs to respond RAwhile Aircraft 4 keeps its heading(3) Originally Aircraft 1 and Aircraft 4 donot have a threat but a TA is issued at72448 and the left time is not enough toresolve the new encounter At 72451Aircraft 1 and Aircraft 4 collide
5 Conclusion
TCAS has been reflected to greatly improve safety in resolv-ing conflicts It constantly receives the data such as thealtitude heading speed and other discrete inputs fromnearby aircraft These replies are used to compute relativealtitude collision course and the CPA when compared tothe intruders The overextending aircraft usage for civil andmilitary applicationswould lead to a higher number of threatswhich can raise the risk of potential collisions Howeverthere is a lack of innovative strategies to improve the CAperformance of TCAS in multiaircraft scenarios
The main contribution of this paper is an innovativeimprovement of the TCAS avoidance performance usinga causal CPN model which is based on the proposed
mathematical model for TCAS operations considering pilotreactions The proposed causal model is absolutely in viewof the TCAS-based avoidance operations and considersprobabilistic pilot response Based on the generated statespace the model not only provides a better comprehensionof the potential collision occurrences for risk assessmentby representing the cause-effect relationship of each actionbut also aids the crews in the involved aircraft to make acooperative and feasible option Besides several techniques(eg eliminating the situations that the aircraft are separate)are utilized to improve the computational efficiency andinventively resolved the problem of expansive state explo-ration The causal model can play a major role for resolvingTCAS-TCAS encounters in the aircraft flocks and support thedevelopment of new TCAS version
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
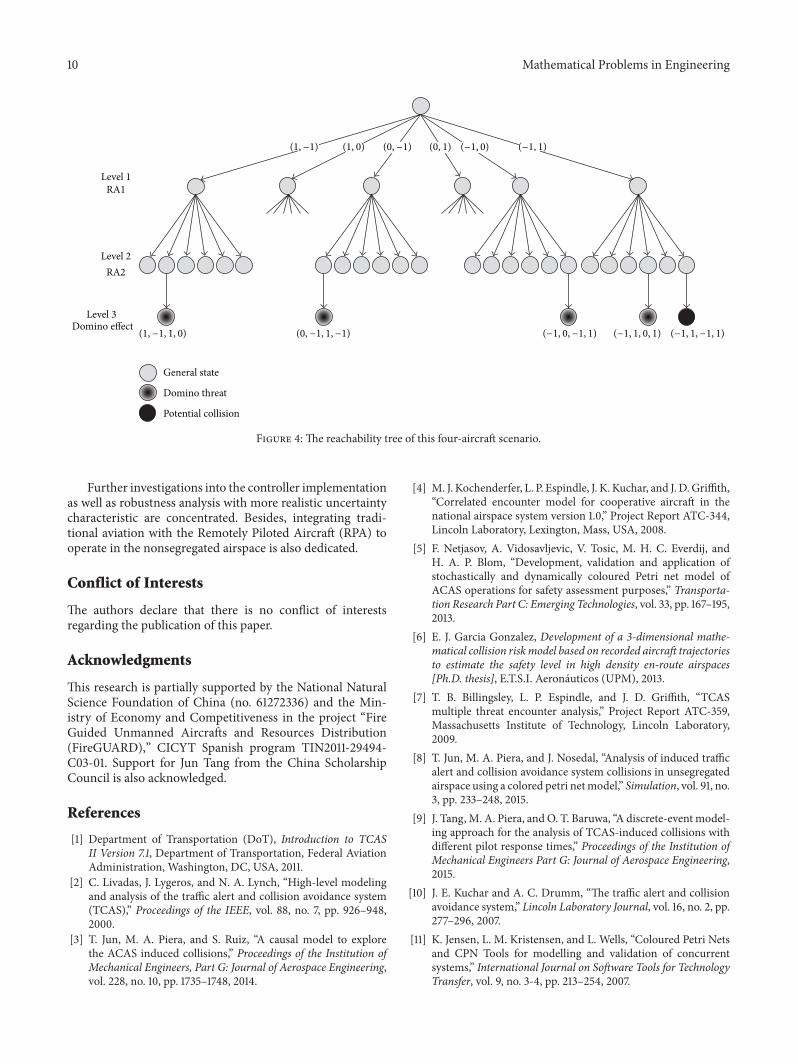
10 Mathematical Problems in Engineering
Level 1RA1
RA2Level 2
Level 3Domino effect
General state
Domino threat
Potential collision
(1 minus1 1 0) (0 minus1 1 minus1) (minus1 0 minus1 1) (minus1 1 0 1) (minus1 1 minus1 1)
(1 minus1) (1 0) (0 1)(0 minus1) (minus1 0) (minus1 1)
Figure 4 The reachability tree of this four-aircraft scenario
Further investigations into the controller implementationas well as robustness analysis with more realistic uncertaintycharacteristic are concentrated Besides integrating tradi-tional aviation with the Remotely Piloted Aircraft (RPA) tooperate in the nonsegregated airspace is also dedicated
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This research is partially supported by the National NaturalScience Foundation of China (no 61272336) and the Min-istry of Economy and Competitiveness in the project ldquoFireGuided Unmanned Aircrafts and Resources Distribution(FireGUARD)rdquo CICYT Spanish program TIN2011-29494-C03-01 Support for Jun Tang from the China ScholarshipCouncil is also acknowledged
References
[1] Department of Transportation (DoT) Introduction to TCASII Version 71 Department of Transportation Federal AviationAdministration Washington DC USA 2011
[2] C Livadas J Lygeros and N A Lynch ldquoHigh-level modelingand analysis of the traffic alert and collision avoidance system(TCAS)rdquo Proceedings of the IEEE vol 88 no 7 pp 926ndash9482000
[3] T Jun M A Piera and S Ruiz ldquoA causal model to explorethe ACAS induced collisionsrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineeringvol 228 no 10 pp 1735ndash1748 2014
[4] M J Kochenderfer L P Espindle J K Kuchar and J DGriffithldquoCorrelated encounter model for cooperative aircraft in thenational airspace system version 10rdquo Project Report ATC-344Lincoln Laboratory Lexington Mass USA 2008
[5] F Netjasov A Vidosavljevic V Tosic M H C Everdij andH A P Blom ldquoDevelopment validation and application ofstochastically and dynamically coloured Petri net model ofACAS operations for safety assessment purposesrdquo Transporta-tion Research Part C Emerging Technologies vol 33 pp 167ndash1952013
[6] E J Garcia Gonzalez Development of a 3-dimensional mathe-matical collision riskmodel based on recorded aircraft trajectoriesto estimate the safety level in high density en-route airspaces[PhD thesis] ETSI Aeronauticos (UPM) 2013
[7] T B Billingsley L P Espindle and J D Griffith ldquoTCASmultiple threat encounter analysisrdquo Project Report ATC-359Massachusetts Institute of Technology Lincoln Laboratory2009
[8] T Jun M A Piera and J Nosedal ldquoAnalysis of induced trafficalert and collision avoidance system collisions in unsegregatedairspace using a colored petri netmodelrdquo Simulation vol 91 no3 pp 233ndash248 2015
[9] J TangM A Piera and O T Baruwa ldquoA discrete-event model-ing approach for the analysis of TCAS-induced collisions withdifferent pilot response timesrdquo Proceedings of the Institution ofMechanical Engineers Part G Journal of Aerospace Engineering2015
[10] J E Kuchar and A C Drumm ldquoThe traffic alert and collisionavoidance systemrdquo Lincoln Laboratory Journal vol 16 no 2 pp277ndash296 2007
[11] K Jensen L M Kristensen and L Wells ldquoColoured Petri Netsand CPN Tools for modelling and validation of concurrentsystemsrdquo International Journal on Software Tools for TechnologyTransfer vol 9 no 3-4 pp 213ndash254 2007
Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
[12] M A Piera and G Music ldquoColoured Petri net schedulingmodels timed state space exploration shortagesrdquo Mathematicsand Computers in Simulation vol 82 no 3 pp 428ndash441 2011
[13] E Villani J C Pascal P E Miyagi and R Valette ldquoA Petrinet-based object-oriented approach for themodelling of hybridproductive systemsrdquo Nonlinear Analysis Theory Methods andApplications vol 62 no 8 pp 1394ndash1418 2005
[14] K Jensen and L M Kristensen Colored Petri Nets Modellingand Validation of Concurrent Systems Springer Berlin Ger-many 2009
[15] K Jensen L M Kristensen and T Mailund ldquoThe sweep-linestate space exploration methodrdquo Theoretical Computer Sciencevol 429 pp 169ndash179 2012
[16] K Salimifard and M Wright ldquoPetri net-based modelling ofworkflow systems an overviewrdquo European Journal of Opera-tional Research vol 134 no 3 pp 664ndash676 2001
[17] M Narciso M A Piera and A Guasch ldquoA methodology forsolving logistic optimization problems through simulationrdquoSimulation vol 86 no 5-6 pp 369ndash389 2010
[18] Eurocontrol ldquoThe EUR RVSM Pre-implementation safety caseversion 20rdquo Document RVSM691 2001 httpdependabilitycsvirginiaeduresearchsafetycasesEUR RVSMpdf
[19] O T Baruwa and M A Piera ldquoAnytime heuristic search forscheduling flexible manufacturing systems a timed coloredPetri net approachrdquo The International Journal of AdvancedManufacturing Technology vol 75 no 1ndash4 pp 123ndash137 2014
[20] O T Baruwa and M A Piera ldquoIdentifying FMS repetitivepatterns for efficient search-based scheduling algorithm acolored Petri net approachrdquo Journal of Manufacturing Systemsvol 35 pp 120ndash135 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of





























