Embed Size (px)
Citation preview

Research ArticleEnergy Flow Chart-Based Energy Efficiency Analysis ofa Range-Extended Electric Bus
Xiaogang Wu Chen Hu and Jingfu Chen
College of Electrical and Electronic Engineering Harbin University of Science and Technology Xue Fu Road 52Harbin 150080 China
Correspondence should be addressed to Xiaogang Wu xgwuhrbusteducn
Received 13 December 2013 Accepted 29 January 2014 Published 9 March 2014
Academic Editor Hamid R Karimi
Copyright copy 2014 Xiaogang Wu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper puts forward an energy flow chart analysis method for a range-extended electric bus This method uses dissipationand cycle energy recycle efficiency and fuel-traction efficiency as evaluation indexes In powertrain energy efficiency analysis therange-extended electric bus is developed by Tsinghua University the driving cycle based on that of Harbin a northern ChinesecityThe CD-CS and blended methods are applied in energy management strategies Analysis results show with average daily rangeof 200 km auxiliary power of 10 kW CD-CS strategy recycle ability and fuel-traction efficiency are higher The input-recycledefficiency using the blended strategy is 2473 higher than CD-CS strategy while the output-recycled efficiency when using theblended strategy is 783 lower than CD-CS strategy
1 Introduction
Compared with conventional fuel vehicles application ofelectric vehicle decreases the dependency on petroleumand has the advantages of high energy efficiency and lowenvironmental impact [1ndash3] For a pure electric bus the costof a battery pack that can meet the driving range is too highmeanwhile vehicle weight is too large for adding a largebattery pack A range-extended electric vehicle is regarded asone of the most suitable solutions for powertrain schemesbecause of the maximum utility of the electric drive and theminimum capacity requirement of battery packs
The main powertrain configurations of range-extendedelectric vehicles are series plug-in hybrid electric vehicles[4] and the Chevrolet Volt produced by General MotorsCorporation (GM) [5] This paper will analyze a series plug-in hybrid electric bus
In the studies of energy efficiency and fuel economyof range-extended electric vehicles vehicle performance isanalyzed on the basis of energy consumption and greenhousegas emissions on the well-to-wheel and tank-to-wheel paths[6 7] Well-to-wheel fuel economy and greenhouse gas emis-sions data were obtained using the greenhouse gases regu-lated emissions and energy use in transportation (GREET)
software model The tank-to-wheel process is characterizedby the recuperation and fuel-traction efficiencies which arequantified and compared for two optimization-based energymanagement strategies
The improvement of fuel economy for a range-extendedelectric vehicle can be realized by matching powertrain partsand a model selection method [8ndash12] An optimal gen-setoperating line method can minimize fuel consumption at aset level of electric output power Series hybrid vehicles withdirect injected stratified charge (DISC) rotary engines areproven to be more efficient in pure electric mode in terms ofenergy consumption and greenhouse gases (GHG) emissionsthan in vehicles with reciprocating engines
Energy efficiency and fuel economy of range-extendelectric vehicles can be improved by studying energy man-agement strategy [13ndash16] Researchers use dynamic program-ming strategies and equivalent consumption minimizationstrategies as well as Pontryaginrsquos minimum principle strategyto analyze energy efficiency and fuel economy of range-extended electric vehicles and results show that optimizedenergy management strategy can improve energy efficiencyand fuel economy to a certain extent
In conclusion current studies on configuration analysisand energy management strategy on range-extended electric
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 972139 12 pageshttpdxdoiorg1011552014972139
2 Mathematical Problems in Engineering
Engine Generator Converter
Mechanical joint
Power battery
Traction motor controller
Traction motor
Mechanical joint
Transmission and main reducer
Electrical joint
Electrical joint
Electrical joint
Range-extender
Figure 1 Powertrain configuration of the range-extended electric bus
vehiclesmainly focus on passenger vehicles but work is rarelyconducted into range-extended electric buses Reference [17]asserts that a driving cycle significantly influences the energyefficiency and fuel economy of the vehicle It proposesthat construction and optimization of energy managementstrategy should consider different driving cycles A system ofenergy efficiency analysis based on a certain driving cycle isthe foundation of an optimal control strategy
This paper focuses on the application requirements of therange-extended electric bus developed by Tsinghua Univer-sity in Harbin and establishes the powertrain model of thebus based on the construction of the Harbin driving cycle Itexamines the energy efficiency of the range-extended electricbus with two different energymanagement strategies (CD-CSand blended) and proposes improvementmethods for energyefficiency
2 Configuration and Principle of theRange-Extended Electric Bus
The range-extended electric vehicle lies between the plug-in hybrid electric vehicle and pure electric vehicle Com-pared with a pure electric vehicle a range-extended electricvehicle is supplemented with an onboard power generationsystem (range-extender) [18 19]The range-extender consistsof engine generator and rectifier The engine continuallycharges the power battery so the driving range can be greatlyincreased to the level of a conventional internal combustionengine vehicle The engine and power battery of a range-extended electric bus can be optimized at the same time Theworking area of the engine can be optimized according to thedriving cycle and the engine efficiency can be improved Theengine can operate with low pollution and fuel consumptionAs for the battery working condition of the power battery canalso be optimized If the power battery can continually workin good condition without overcharging or overdischargingbattery life can be extended Braking energy can be recycledand energy consumption is decreased The range-extender
solves the problems of the energy consumption of air-conditioning lighting heating and other electric auxiliariesmaking the range-extended electric bus the most suitablesolution for city buses
A typical range-extended electric powertrain is shownin Figure 1 In a range-extended electric vehicle wheels aredriven directly by an electric motor The motor draws energyfrom a battery pack and drives in pure electric mode whenbattery energy is available Once the battery has been mostlydepleted the motor draws power from the range-extendercomposed of an internal combustion engine and generator inconjunction with a battery Range-extended electric vehiclesare designed with a predetermined all-electric range (AER)The AER represents the distance that the vehicle can travelusing the energy stored in its battery only without the engineand generator Vehicles with a higher AER must have largerheavier and more expensive battery systems The range-extended electric powertrain configuration is one of the mostattractive applications for the diesel engine
We can see the powertrain configuration of the range-extended electric bus discussed in this paper the energyflow conditions of different driving modes are analyzed asis shown in Figure 2 There are three driving modes pureelectric drive mode range-extended mode and regenerativebrake mode
Pure electric drivemode is shown in Figure 2(a) If SOC ishigh the powertrain begins pure electric mode whereby theengine stops and the motor will be driven by a power batteryCheaper electric energy from the power grid is fully utilizedFuel consumption and pollution are reduced in this mode IfSOC decreases to the set starting value the range-extenderbegins and the powertrain works in range-extended mode
Powertrain working in range-extended is shown inFigure 2(b) To increase driving range if SOCdecreases to theset starting value the range-extender starts to generate powerreducing the rate of electricity loss and ensuring the motorcan work to drive the busThis mode can be divided into twokinds One if the output power of range-extender is lowerthan the motor required power the lacking electric energy isprovided by battery the battery discharges Two if the output
Mathematical Problems in Engineering 3
Engine
Power battery
Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Discharging
Driving
Main reducerRectifierGenerator
Range-extender
(a) Pure electric drive mode
Engine Inverter Tractionmotor
Mechanical joint
Electrical joint
Wheel
Wheel
Discharging
DrivingGenerating
Engine Inverter Traction Motor
Mechanical joint
Mechanical joint
Electrical joint
Electrical joint Electrical
jointMechanical
jointCharging
Wheel
Wheel
Generating Driving
Generator
RectifierGenerator
Rectifier
Main reducer
Main reducer
Power battery
Power battery
Range-extender
Range-extender
(b) Range-extended mode
Engine Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Charging
Braking
Main reducerRectifierGenerator
Power battery
Range-extender
(c) Regenerative brake mode
Figure 2 Driving modes of the range-extended electric bus
4 Mathematical Problems in Engineering
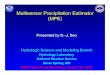
Figure 3 The range-extended electric bus developed by TsinghuaUniversity
power of the range-extender is higher than the requiredmotor power the redundant electric energy is reserved inbattery charging the battery The output power of the range-extender is not directly influenced by the driving conditionsand can be optimized in the high efficiency working areas ofthe engine and motor
If the bus is braking the motor can work in regenerativebrake mode as is shown in Figure 2(c) The motor providesbraking torque for the vehicle wheels and braking energyis transferred into electric energy reserved in the batteryBraking energy is not transferred into heat and lost it isrecycled
For an individual axle drive bus only wheels driven by themotor can recycle braking energy Other wheels are stoppedby mechanical braking Braking energy is partly recycled andmechanical braking is also used on driven wheels for safety
The range-extended electric bus analyzed in this paperis developed by Tsinghua University shown in Figure 3The powertrain is designed based on matching powertrainparts and model selection found in [20] The generator is apermanent magnet generator and the traction motor is anasynchronous motor Key parameters of the powertrain arelisted in Table 1
3 System Modeling of the Range-ExtendedElectric Bus
To analyze energy efficiency and fuel economy of the range-extended electric bus system models based on benchmarksand modeling lines of [21ndash24] are built The basic model ofthe range-extended electric system can be divided into fourmodules range-extender module traction motor modulepower battery module and the vehicle longitudinal dynam-ics module Considering the high complexity of a dieselengine permanent magnet synchronous generator and therectifier and driving motor relevant components are testedby benchmarks and the characteristics MAP are determinedaccording to the test results Then the simulation modelsare built based on the MAP which replaces the complexmathematical description reduces modeling complexity andtherefore improves model credibility
Table 1 Powertrain parameters of range-extended electric bus
Vehicle
Size (length times width times
height)mm 11980 times 2550 times 3200
Vehicle masskg 13000Rated passengers 78Windward aream2 75
Air resistance coefficient119862119863
075
Rolling resistancecoefficient 119891 00076 + 000056119906
119886
Rolling radius 119903m 0512Speed ratio of main reducer
1198940
62
Speed ratio of transmission119894119892
234
Motor
Continuous powerkW 100Peak powerkW 180
Maximum torqueNsdotm 860Maximum speedrmin 4500Operating voltageV 300sim450
Engine DisplacementL 19PowerkW 824000 rmin
Generator Rated powerkW 50Rated torqueNsdotm 220
Power Battery Capacity 180AhOperating voltageV 350sim460
31 Range-Extender The range-extender includes a dieselengine a permanent magnet synchronous generator andrectifier System features can be described by the followingequations
119899eng = 119899119903
1
120591119890119904 + 1
119879eng = 1198911(120572 119899eng)
119862eng = 1198912(119899eng 119879eng)
120578gr = 1198913(119899eng 120582) sdot 120578119903
(1)
where 1198911is the accelerator characteristic MAP of the engine
1198912is fuel consumption characteristic MAP of the engine
1198913is the generator efficiency MAP 119899
119903is the enginersquos target
speed 120577119890is a time constant 120572 is the accelerator signal 119899eng is
the enginersquos actual speed 119879eng is the engine torque 120582 is thegenerator loading rate 120578
119903is the rectifier efficiency 119862eng is the
enginersquos instantaneous fuel consumption and 120578gr is the totalrate of the generator and rectifier
32 Traction Motor The traction motor module includes themotor and motor controllerThemotor model consists of the
Mathematical Problems in Engineering 5
Wheel Final drive Motor Converter
Battery
Wheel Final drive Motor Converter
Input way
Output way
Figure 4 Schema of recycle energy flow
steady state efficiency characteristic MAP and a first-orderprocess
120578119898= 1198911198981
(119899119898 119879119898)
119879119898= min (119879
119903 119879max) sdot
1
120591119898119904 + 1
119879max = 1198911198982
(119899119898)
(2)
where 120578119898is the motorrsquos electric efficiency 119899
119898is the motorrsquos
rotational speed 120577119898
is a time constant and 119879119898 119879119903 and
119879max are the motorrsquos actual torque target torque and torquecapacity respectively The function 119891
1198981denotes the motorrsquos
efficiency MAP and 1198911198982
denotes the motorrsquos maximumoutput torque characteristic MAP
33 Power Battery Thepower batterymodel is built based onthe119877intmodel which is equivalent to a variable voltage sourceand a variable resistance in series According to the batteryinternal resistance equivalent circuit the following equationcan be established
119880oc = 119864 (SOC 119879) minus 119868 sdot 119877 (SOC 119879) (3)
where SOC is the state of charge of the battery 119879 is thetemperature and 119868 is the battery current 119864 stands for theopen circuit voltage of the battery which is a function of SOC119879 is determined by the test and 119877 is the internal resistance ofthe battery
In this model the batteryrsquos SOC state uses ampere-hourintegral method to estimate [25] That is when the vehicle is
in operation it will use SOC as SOCint and at 119905moment it willuse SOC formula (4) to decide the following
SOC = SOCint minus1
119876119887
int
119905
1199050
120578bat119868bat119889119905 (4)
where 119876119887is rated capacity 120578bat is the batteryrsquos columbic
capacity and 119868bat is its charging and discharging current
34 Vehicle Longitudinal Dynamics The road load character-istic is assumed to be ideal in simulation that is zero air speedand good adhesion As the vehicle is traveling on the roadtraction motor needs to overcome driving resistance (119865
119905)
rolling resistance (119865119891) air resistance (119865
119908) slope resistance
(119865119894) and acceleration resistance (119865
119895) Consider
119865119905= 119865119891+ 119865119908+ 119865119894+ 119865119895
119865119891= 119891119898119892 cos (119886 tan 119894)
119865119908=
1
2
1198621198891198601205881199062
119886
119865119894= 119898119892 sin (119886 tan 119894)
119865119895= 028120575119898
119889119906119886
119889119905
119865119905=
36120578119879119875motor119906119886
(5)
where 119891 is the rolling resistance coefficient 119898 is the vehiclemass 119892 is the acceleration of gravity 119894 is the road slope 119862
119889is
the coefficient of air resistance 119860 is the windward area 120588is the air density 119906
119886is the motor speed 120575 is the correction
coefficient of rotatingmass 120578119879is the overall efficiency of drive
system and 119875motor is the output power of the traction motor
6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Engine Generator Converter
Mechanical joint
Power battery
Traction motor controller
Traction motor
Mechanical joint
Transmission and main reducer
Electrical joint
Electrical joint
Electrical joint
Range-extender
Figure 1 Powertrain configuration of the range-extended electric bus
vehiclesmainly focus on passenger vehicles but work is rarelyconducted into range-extended electric buses Reference [17]asserts that a driving cycle significantly influences the energyefficiency and fuel economy of the vehicle It proposesthat construction and optimization of energy managementstrategy should consider different driving cycles A system ofenergy efficiency analysis based on a certain driving cycle isthe foundation of an optimal control strategy
This paper focuses on the application requirements of therange-extended electric bus developed by Tsinghua Univer-sity in Harbin and establishes the powertrain model of thebus based on the construction of the Harbin driving cycle Itexamines the energy efficiency of the range-extended electricbus with two different energymanagement strategies (CD-CSand blended) and proposes improvementmethods for energyefficiency
2 Configuration and Principle of theRange-Extended Electric Bus
The range-extended electric vehicle lies between the plug-in hybrid electric vehicle and pure electric vehicle Com-pared with a pure electric vehicle a range-extended electricvehicle is supplemented with an onboard power generationsystem (range-extender) [18 19]The range-extender consistsof engine generator and rectifier The engine continuallycharges the power battery so the driving range can be greatlyincreased to the level of a conventional internal combustionengine vehicle The engine and power battery of a range-extended electric bus can be optimized at the same time Theworking area of the engine can be optimized according to thedriving cycle and the engine efficiency can be improved Theengine can operate with low pollution and fuel consumptionAs for the battery working condition of the power battery canalso be optimized If the power battery can continually workin good condition without overcharging or overdischargingbattery life can be extended Braking energy can be recycledand energy consumption is decreased The range-extender
solves the problems of the energy consumption of air-conditioning lighting heating and other electric auxiliariesmaking the range-extended electric bus the most suitablesolution for city buses
A typical range-extended electric powertrain is shownin Figure 1 In a range-extended electric vehicle wheels aredriven directly by an electric motor The motor draws energyfrom a battery pack and drives in pure electric mode whenbattery energy is available Once the battery has been mostlydepleted the motor draws power from the range-extendercomposed of an internal combustion engine and generator inconjunction with a battery Range-extended electric vehiclesare designed with a predetermined all-electric range (AER)The AER represents the distance that the vehicle can travelusing the energy stored in its battery only without the engineand generator Vehicles with a higher AER must have largerheavier and more expensive battery systems The range-extended electric powertrain configuration is one of the mostattractive applications for the diesel engine
We can see the powertrain configuration of the range-extended electric bus discussed in this paper the energyflow conditions of different driving modes are analyzed asis shown in Figure 2 There are three driving modes pureelectric drive mode range-extended mode and regenerativebrake mode
Pure electric drivemode is shown in Figure 2(a) If SOC ishigh the powertrain begins pure electric mode whereby theengine stops and the motor will be driven by a power batteryCheaper electric energy from the power grid is fully utilizedFuel consumption and pollution are reduced in this mode IfSOC decreases to the set starting value the range-extenderbegins and the powertrain works in range-extended mode
Powertrain working in range-extended is shown inFigure 2(b) To increase driving range if SOCdecreases to theset starting value the range-extender starts to generate powerreducing the rate of electricity loss and ensuring the motorcan work to drive the busThis mode can be divided into twokinds One if the output power of range-extender is lowerthan the motor required power the lacking electric energy isprovided by battery the battery discharges Two if the output
Mathematical Problems in Engineering 3
Engine
Power battery
Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Discharging
Driving
Main reducerRectifierGenerator
Range-extender
(a) Pure electric drive mode
Engine Inverter Tractionmotor
Mechanical joint
Electrical joint
Wheel
Wheel
Discharging
DrivingGenerating
Engine Inverter Traction Motor
Mechanical joint
Mechanical joint
Electrical joint
Electrical joint Electrical
jointMechanical
jointCharging
Wheel
Wheel
Generating Driving
Generator
RectifierGenerator
Rectifier
Main reducer
Main reducer
Power battery
Power battery
Range-extender
Range-extender
(b) Range-extended mode
Engine Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Charging
Braking
Main reducerRectifierGenerator
Power battery
Range-extender
(c) Regenerative brake mode
Figure 2 Driving modes of the range-extended electric bus
4 Mathematical Problems in Engineering
Figure 3 The range-extended electric bus developed by TsinghuaUniversity
power of the range-extender is higher than the requiredmotor power the redundant electric energy is reserved inbattery charging the battery The output power of the range-extender is not directly influenced by the driving conditionsand can be optimized in the high efficiency working areas ofthe engine and motor
If the bus is braking the motor can work in regenerativebrake mode as is shown in Figure 2(c) The motor providesbraking torque for the vehicle wheels and braking energyis transferred into electric energy reserved in the batteryBraking energy is not transferred into heat and lost it isrecycled
For an individual axle drive bus only wheels driven by themotor can recycle braking energy Other wheels are stoppedby mechanical braking Braking energy is partly recycled andmechanical braking is also used on driven wheels for safety
The range-extended electric bus analyzed in this paperis developed by Tsinghua University shown in Figure 3The powertrain is designed based on matching powertrainparts and model selection found in [20] The generator is apermanent magnet generator and the traction motor is anasynchronous motor Key parameters of the powertrain arelisted in Table 1
3 System Modeling of the Range-ExtendedElectric Bus
To analyze energy efficiency and fuel economy of the range-extended electric bus system models based on benchmarksand modeling lines of [21ndash24] are built The basic model ofthe range-extended electric system can be divided into fourmodules range-extender module traction motor modulepower battery module and the vehicle longitudinal dynam-ics module Considering the high complexity of a dieselengine permanent magnet synchronous generator and therectifier and driving motor relevant components are testedby benchmarks and the characteristics MAP are determinedaccording to the test results Then the simulation modelsare built based on the MAP which replaces the complexmathematical description reduces modeling complexity andtherefore improves model credibility
Table 1 Powertrain parameters of range-extended electric bus
Vehicle
Size (length times width times
height)mm 11980 times 2550 times 3200
Vehicle masskg 13000Rated passengers 78Windward aream2 75
Air resistance coefficient119862119863
075
Rolling resistancecoefficient 119891 00076 + 000056119906
119886
Rolling radius 119903m 0512Speed ratio of main reducer
1198940
62
Speed ratio of transmission119894119892
234
Motor
Continuous powerkW 100Peak powerkW 180
Maximum torqueNsdotm 860Maximum speedrmin 4500Operating voltageV 300sim450
Engine DisplacementL 19PowerkW 824000 rmin
Generator Rated powerkW 50Rated torqueNsdotm 220
Power Battery Capacity 180AhOperating voltageV 350sim460
31 Range-Extender The range-extender includes a dieselengine a permanent magnet synchronous generator andrectifier System features can be described by the followingequations
119899eng = 119899119903
1
120591119890119904 + 1
119879eng = 1198911(120572 119899eng)
119862eng = 1198912(119899eng 119879eng)
120578gr = 1198913(119899eng 120582) sdot 120578119903
(1)
where 1198911is the accelerator characteristic MAP of the engine
1198912is fuel consumption characteristic MAP of the engine
1198913is the generator efficiency MAP 119899
119903is the enginersquos target
speed 120577119890is a time constant 120572 is the accelerator signal 119899eng is
the enginersquos actual speed 119879eng is the engine torque 120582 is thegenerator loading rate 120578
119903is the rectifier efficiency 119862eng is the
enginersquos instantaneous fuel consumption and 120578gr is the totalrate of the generator and rectifier
32 Traction Motor The traction motor module includes themotor and motor controllerThemotor model consists of the
Mathematical Problems in Engineering 5
Wheel Final drive Motor Converter
Battery
Wheel Final drive Motor Converter
Input way
Output way
Figure 4 Schema of recycle energy flow
steady state efficiency characteristic MAP and a first-orderprocess
120578119898= 1198911198981
(119899119898 119879119898)
119879119898= min (119879
119903 119879max) sdot
1
120591119898119904 + 1
119879max = 1198911198982
(119899119898)
(2)
where 120578119898is the motorrsquos electric efficiency 119899
119898is the motorrsquos
rotational speed 120577119898
is a time constant and 119879119898 119879119903 and
119879max are the motorrsquos actual torque target torque and torquecapacity respectively The function 119891
1198981denotes the motorrsquos
efficiency MAP and 1198911198982
denotes the motorrsquos maximumoutput torque characteristic MAP
33 Power Battery Thepower batterymodel is built based onthe119877intmodel which is equivalent to a variable voltage sourceand a variable resistance in series According to the batteryinternal resistance equivalent circuit the following equationcan be established
119880oc = 119864 (SOC 119879) minus 119868 sdot 119877 (SOC 119879) (3)
where SOC is the state of charge of the battery 119879 is thetemperature and 119868 is the battery current 119864 stands for theopen circuit voltage of the battery which is a function of SOC119879 is determined by the test and 119877 is the internal resistance ofthe battery
In this model the batteryrsquos SOC state uses ampere-hourintegral method to estimate [25] That is when the vehicle is
in operation it will use SOC as SOCint and at 119905moment it willuse SOC formula (4) to decide the following
SOC = SOCint minus1
119876119887
int
119905
1199050
120578bat119868bat119889119905 (4)
where 119876119887is rated capacity 120578bat is the batteryrsquos columbic
capacity and 119868bat is its charging and discharging current
34 Vehicle Longitudinal Dynamics The road load character-istic is assumed to be ideal in simulation that is zero air speedand good adhesion As the vehicle is traveling on the roadtraction motor needs to overcome driving resistance (119865
119905)
rolling resistance (119865119891) air resistance (119865
119908) slope resistance
(119865119894) and acceleration resistance (119865
119895) Consider
119865119905= 119865119891+ 119865119908+ 119865119894+ 119865119895
119865119891= 119891119898119892 cos (119886 tan 119894)
119865119908=
1
2
1198621198891198601205881199062
119886
119865119894= 119898119892 sin (119886 tan 119894)
119865119895= 028120575119898
119889119906119886
119889119905
119865119905=
36120578119879119875motor119906119886
(5)
where 119891 is the rolling resistance coefficient 119898 is the vehiclemass 119892 is the acceleration of gravity 119894 is the road slope 119862
119889is
the coefficient of air resistance 119860 is the windward area 120588is the air density 119906
119886is the motor speed 120575 is the correction
coefficient of rotatingmass 120578119879is the overall efficiency of drive
system and 119875motor is the output power of the traction motor
6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Engine
Power battery
Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Discharging
Driving
Main reducerRectifierGenerator
Range-extender
(a) Pure electric drive mode
Engine Inverter Tractionmotor
Mechanical joint
Electrical joint
Wheel
Wheel
Discharging
DrivingGenerating
Engine Inverter Traction Motor
Mechanical joint
Mechanical joint
Electrical joint
Electrical joint Electrical
jointMechanical
jointCharging
Wheel
Wheel
Generating Driving
Generator
RectifierGenerator
Rectifier
Main reducer
Main reducer
Power battery
Power battery
Range-extender
Range-extender
(b) Range-extended mode
Engine Inverter Traction motor
Mechanical joint
Electrical joint Electrical
jointMechanical
joint
Wheel
Wheel
Charging
Braking
Main reducerRectifierGenerator
Power battery
Range-extender
(c) Regenerative brake mode
Figure 2 Driving modes of the range-extended electric bus
4 Mathematical Problems in Engineering
Figure 3 The range-extended electric bus developed by TsinghuaUniversity
power of the range-extender is higher than the requiredmotor power the redundant electric energy is reserved inbattery charging the battery The output power of the range-extender is not directly influenced by the driving conditionsand can be optimized in the high efficiency working areas ofthe engine and motor
If the bus is braking the motor can work in regenerativebrake mode as is shown in Figure 2(c) The motor providesbraking torque for the vehicle wheels and braking energyis transferred into electric energy reserved in the batteryBraking energy is not transferred into heat and lost it isrecycled
For an individual axle drive bus only wheels driven by themotor can recycle braking energy Other wheels are stoppedby mechanical braking Braking energy is partly recycled andmechanical braking is also used on driven wheels for safety
The range-extended electric bus analyzed in this paperis developed by Tsinghua University shown in Figure 3The powertrain is designed based on matching powertrainparts and model selection found in [20] The generator is apermanent magnet generator and the traction motor is anasynchronous motor Key parameters of the powertrain arelisted in Table 1
3 System Modeling of the Range-ExtendedElectric Bus
To analyze energy efficiency and fuel economy of the range-extended electric bus system models based on benchmarksand modeling lines of [21ndash24] are built The basic model ofthe range-extended electric system can be divided into fourmodules range-extender module traction motor modulepower battery module and the vehicle longitudinal dynam-ics module Considering the high complexity of a dieselengine permanent magnet synchronous generator and therectifier and driving motor relevant components are testedby benchmarks and the characteristics MAP are determinedaccording to the test results Then the simulation modelsare built based on the MAP which replaces the complexmathematical description reduces modeling complexity andtherefore improves model credibility
Table 1 Powertrain parameters of range-extended electric bus
Vehicle
Size (length times width times
height)mm 11980 times 2550 times 3200
Vehicle masskg 13000Rated passengers 78Windward aream2 75
Air resistance coefficient119862119863
075
Rolling resistancecoefficient 119891 00076 + 000056119906
119886
Rolling radius 119903m 0512Speed ratio of main reducer
1198940
62
Speed ratio of transmission119894119892
234
Motor
Continuous powerkW 100Peak powerkW 180
Maximum torqueNsdotm 860Maximum speedrmin 4500Operating voltageV 300sim450
Engine DisplacementL 19PowerkW 824000 rmin
Generator Rated powerkW 50Rated torqueNsdotm 220
Power Battery Capacity 180AhOperating voltageV 350sim460
31 Range-Extender The range-extender includes a dieselengine a permanent magnet synchronous generator andrectifier System features can be described by the followingequations
119899eng = 119899119903
1
120591119890119904 + 1
119879eng = 1198911(120572 119899eng)
119862eng = 1198912(119899eng 119879eng)
120578gr = 1198913(119899eng 120582) sdot 120578119903
(1)
where 1198911is the accelerator characteristic MAP of the engine
1198912is fuel consumption characteristic MAP of the engine
1198913is the generator efficiency MAP 119899
119903is the enginersquos target
speed 120577119890is a time constant 120572 is the accelerator signal 119899eng is
the enginersquos actual speed 119879eng is the engine torque 120582 is thegenerator loading rate 120578
119903is the rectifier efficiency 119862eng is the
enginersquos instantaneous fuel consumption and 120578gr is the totalrate of the generator and rectifier
32 Traction Motor The traction motor module includes themotor and motor controllerThemotor model consists of the
Mathematical Problems in Engineering 5
Wheel Final drive Motor Converter
Battery
Wheel Final drive Motor Converter
Input way
Output way
Figure 4 Schema of recycle energy flow
steady state efficiency characteristic MAP and a first-orderprocess
120578119898= 1198911198981
(119899119898 119879119898)
119879119898= min (119879
119903 119879max) sdot
1
120591119898119904 + 1
119879max = 1198911198982
(119899119898)
(2)
where 120578119898is the motorrsquos electric efficiency 119899
119898is the motorrsquos
rotational speed 120577119898
is a time constant and 119879119898 119879119903 and
119879max are the motorrsquos actual torque target torque and torquecapacity respectively The function 119891
1198981denotes the motorrsquos
efficiency MAP and 1198911198982
denotes the motorrsquos maximumoutput torque characteristic MAP
33 Power Battery Thepower batterymodel is built based onthe119877intmodel which is equivalent to a variable voltage sourceand a variable resistance in series According to the batteryinternal resistance equivalent circuit the following equationcan be established
119880oc = 119864 (SOC 119879) minus 119868 sdot 119877 (SOC 119879) (3)
where SOC is the state of charge of the battery 119879 is thetemperature and 119868 is the battery current 119864 stands for theopen circuit voltage of the battery which is a function of SOC119879 is determined by the test and 119877 is the internal resistance ofthe battery
In this model the batteryrsquos SOC state uses ampere-hourintegral method to estimate [25] That is when the vehicle is
in operation it will use SOC as SOCint and at 119905moment it willuse SOC formula (4) to decide the following
SOC = SOCint minus1
119876119887
int
119905
1199050
120578bat119868bat119889119905 (4)
where 119876119887is rated capacity 120578bat is the batteryrsquos columbic
capacity and 119868bat is its charging and discharging current
34 Vehicle Longitudinal Dynamics The road load character-istic is assumed to be ideal in simulation that is zero air speedand good adhesion As the vehicle is traveling on the roadtraction motor needs to overcome driving resistance (119865
119905)
rolling resistance (119865119891) air resistance (119865
119908) slope resistance
(119865119894) and acceleration resistance (119865
119895) Consider
119865119905= 119865119891+ 119865119908+ 119865119894+ 119865119895
119865119891= 119891119898119892 cos (119886 tan 119894)
119865119908=
1
2
1198621198891198601205881199062
119886
119865119894= 119898119892 sin (119886 tan 119894)
119865119895= 028120575119898
119889119906119886
119889119905
119865119905=
36120578119879119875motor119906119886
(5)
where 119891 is the rolling resistance coefficient 119898 is the vehiclemass 119892 is the acceleration of gravity 119894 is the road slope 119862
119889is
the coefficient of air resistance 119860 is the windward area 120588is the air density 119906
119886is the motor speed 120575 is the correction
coefficient of rotatingmass 120578119879is the overall efficiency of drive
system and 119875motor is the output power of the traction motor
6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Figure 3 The range-extended electric bus developed by TsinghuaUniversity
power of the range-extender is higher than the requiredmotor power the redundant electric energy is reserved inbattery charging the battery The output power of the range-extender is not directly influenced by the driving conditionsand can be optimized in the high efficiency working areas ofthe engine and motor
If the bus is braking the motor can work in regenerativebrake mode as is shown in Figure 2(c) The motor providesbraking torque for the vehicle wheels and braking energyis transferred into electric energy reserved in the batteryBraking energy is not transferred into heat and lost it isrecycled
For an individual axle drive bus only wheels driven by themotor can recycle braking energy Other wheels are stoppedby mechanical braking Braking energy is partly recycled andmechanical braking is also used on driven wheels for safety
The range-extended electric bus analyzed in this paperis developed by Tsinghua University shown in Figure 3The powertrain is designed based on matching powertrainparts and model selection found in [20] The generator is apermanent magnet generator and the traction motor is anasynchronous motor Key parameters of the powertrain arelisted in Table 1
3 System Modeling of the Range-ExtendedElectric Bus
To analyze energy efficiency and fuel economy of the range-extended electric bus system models based on benchmarksand modeling lines of [21ndash24] are built The basic model ofthe range-extended electric system can be divided into fourmodules range-extender module traction motor modulepower battery module and the vehicle longitudinal dynam-ics module Considering the high complexity of a dieselengine permanent magnet synchronous generator and therectifier and driving motor relevant components are testedby benchmarks and the characteristics MAP are determinedaccording to the test results Then the simulation modelsare built based on the MAP which replaces the complexmathematical description reduces modeling complexity andtherefore improves model credibility
Table 1 Powertrain parameters of range-extended electric bus
Vehicle
Size (length times width times
height)mm 11980 times 2550 times 3200
Vehicle masskg 13000Rated passengers 78Windward aream2 75
Air resistance coefficient119862119863
075
Rolling resistancecoefficient 119891 00076 + 000056119906
119886
Rolling radius 119903m 0512Speed ratio of main reducer
1198940
62
Speed ratio of transmission119894119892
234
Motor
Continuous powerkW 100Peak powerkW 180
Maximum torqueNsdotm 860Maximum speedrmin 4500Operating voltageV 300sim450
Engine DisplacementL 19PowerkW 824000 rmin
Generator Rated powerkW 50Rated torqueNsdotm 220
Power Battery Capacity 180AhOperating voltageV 350sim460
31 Range-Extender The range-extender includes a dieselengine a permanent magnet synchronous generator andrectifier System features can be described by the followingequations
119899eng = 119899119903
1
120591119890119904 + 1
119879eng = 1198911(120572 119899eng)
119862eng = 1198912(119899eng 119879eng)
120578gr = 1198913(119899eng 120582) sdot 120578119903
(1)
where 1198911is the accelerator characteristic MAP of the engine
1198912is fuel consumption characteristic MAP of the engine
1198913is the generator efficiency MAP 119899
119903is the enginersquos target
speed 120577119890is a time constant 120572 is the accelerator signal 119899eng is
the enginersquos actual speed 119879eng is the engine torque 120582 is thegenerator loading rate 120578
119903is the rectifier efficiency 119862eng is the
enginersquos instantaneous fuel consumption and 120578gr is the totalrate of the generator and rectifier
32 Traction Motor The traction motor module includes themotor and motor controllerThemotor model consists of the
Mathematical Problems in Engineering 5
Wheel Final drive Motor Converter
Battery
Wheel Final drive Motor Converter
Input way
Output way
Figure 4 Schema of recycle energy flow
steady state efficiency characteristic MAP and a first-orderprocess
120578119898= 1198911198981
(119899119898 119879119898)
119879119898= min (119879
119903 119879max) sdot
1
120591119898119904 + 1
119879max = 1198911198982
(119899119898)
(2)
where 120578119898is the motorrsquos electric efficiency 119899
119898is the motorrsquos
rotational speed 120577119898
is a time constant and 119879119898 119879119903 and
119879max are the motorrsquos actual torque target torque and torquecapacity respectively The function 119891
1198981denotes the motorrsquos
efficiency MAP and 1198911198982
denotes the motorrsquos maximumoutput torque characteristic MAP
33 Power Battery Thepower batterymodel is built based onthe119877intmodel which is equivalent to a variable voltage sourceand a variable resistance in series According to the batteryinternal resistance equivalent circuit the following equationcan be established
119880oc = 119864 (SOC 119879) minus 119868 sdot 119877 (SOC 119879) (3)
where SOC is the state of charge of the battery 119879 is thetemperature and 119868 is the battery current 119864 stands for theopen circuit voltage of the battery which is a function of SOC119879 is determined by the test and 119877 is the internal resistance ofthe battery
In this model the batteryrsquos SOC state uses ampere-hourintegral method to estimate [25] That is when the vehicle is
in operation it will use SOC as SOCint and at 119905moment it willuse SOC formula (4) to decide the following
SOC = SOCint minus1
119876119887
int
119905
1199050
120578bat119868bat119889119905 (4)
where 119876119887is rated capacity 120578bat is the batteryrsquos columbic
capacity and 119868bat is its charging and discharging current
34 Vehicle Longitudinal Dynamics The road load character-istic is assumed to be ideal in simulation that is zero air speedand good adhesion As the vehicle is traveling on the roadtraction motor needs to overcome driving resistance (119865
119905)
rolling resistance (119865119891) air resistance (119865
119908) slope resistance
(119865119894) and acceleration resistance (119865
119895) Consider
119865119905= 119865119891+ 119865119908+ 119865119894+ 119865119895
119865119891= 119891119898119892 cos (119886 tan 119894)
119865119908=
1
2
1198621198891198601205881199062
119886
119865119894= 119898119892 sin (119886 tan 119894)
119865119895= 028120575119898
119889119906119886
119889119905
119865119905=
36120578119879119875motor119906119886
(5)
where 119891 is the rolling resistance coefficient 119898 is the vehiclemass 119892 is the acceleration of gravity 119894 is the road slope 119862
119889is
the coefficient of air resistance 119860 is the windward area 120588is the air density 119906
119886is the motor speed 120575 is the correction
coefficient of rotatingmass 120578119879is the overall efficiency of drive
system and 119875motor is the output power of the traction motor
6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Wheel Final drive Motor Converter
Battery
Wheel Final drive Motor Converter
Input way
Output way
Figure 4 Schema of recycle energy flow
steady state efficiency characteristic MAP and a first-orderprocess
120578119898= 1198911198981
(119899119898 119879119898)
119879119898= min (119879
119903 119879max) sdot
1
120591119898119904 + 1
119879max = 1198911198982
(119899119898)
(2)
where 120578119898is the motorrsquos electric efficiency 119899
119898is the motorrsquos
rotational speed 120577119898
is a time constant and 119879119898 119879119903 and
119879max are the motorrsquos actual torque target torque and torquecapacity respectively The function 119891
1198981denotes the motorrsquos
efficiency MAP and 1198911198982
denotes the motorrsquos maximumoutput torque characteristic MAP
33 Power Battery Thepower batterymodel is built based onthe119877intmodel which is equivalent to a variable voltage sourceand a variable resistance in series According to the batteryinternal resistance equivalent circuit the following equationcan be established
119880oc = 119864 (SOC 119879) minus 119868 sdot 119877 (SOC 119879) (3)
where SOC is the state of charge of the battery 119879 is thetemperature and 119868 is the battery current 119864 stands for theopen circuit voltage of the battery which is a function of SOC119879 is determined by the test and 119877 is the internal resistance ofthe battery
In this model the batteryrsquos SOC state uses ampere-hourintegral method to estimate [25] That is when the vehicle is
in operation it will use SOC as SOCint and at 119905moment it willuse SOC formula (4) to decide the following
SOC = SOCint minus1
119876119887
int
119905
1199050
120578bat119868bat119889119905 (4)
where 119876119887is rated capacity 120578bat is the batteryrsquos columbic
capacity and 119868bat is its charging and discharging current
34 Vehicle Longitudinal Dynamics The road load character-istic is assumed to be ideal in simulation that is zero air speedand good adhesion As the vehicle is traveling on the roadtraction motor needs to overcome driving resistance (119865
119905)
rolling resistance (119865119891) air resistance (119865
119908) slope resistance
(119865119894) and acceleration resistance (119865
119895) Consider
119865119905= 119865119891+ 119865119908+ 119865119894+ 119865119895
119865119891= 119891119898119892 cos (119886 tan 119894)
119865119908=
1
2
1198621198891198601205881199062
119886
119865119894= 119898119892 sin (119886 tan 119894)
119865119895= 028120575119898
119889119906119886
119889119905
119865119905=
36120578119879119875motor119906119886
(5)
where 119891 is the rolling resistance coefficient 119898 is the vehiclemass 119892 is the acceleration of gravity 119894 is the road slope 119862
119889is
the coefficient of air resistance 119860 is the windward area 120588is the air density 119906
119886is the motor speed 120575 is the correction
coefficient of rotatingmass 120578119879is the overall efficiency of drive
system and 119875motor is the output power of the traction motor
6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Engine
Generator andrectifier
Battery
Traction motor
Auxiliary
Axle
Recuperation efficiencyFuel-to-traction efficiency
Efuel
120578eng
Eeng Eloss eng
120578gen120578bout
Egrid
EblossErec
EbrecEb
120578bin
inin
Emcloss Emin
Ebg
Eb
120578cir wEwin
Ecir
Eg
Eae + Erol + EcirErec
Eloss gen
120578mmiddotout120578
mmiddotin
Eloss m
Eau
Figure 5 Energy flow chart in energy efficiency analysis
4 Energy Efficiency Analysis Using EnergyFlow Chart
According to the energy efficiency analysis method of plug-in hybrid electric powertrain in [7] energy efficiency analysiscan be divided into the following three parts
41 Dissipation and Cycle Energy Traction power is usedto drive the wheels and vehicle auxiliaries the calculationequation is as follows
119875 (119905) = 119875ae (119905) + 119875rol (119905) + 119875au (119905) + 119875ac (119905) + 119875gr (119905) (6)
where 119875ae(119905) = 120588air119860119891119888119889V3(119905)2 is the power to overcome
air resistance 120588air is the air density 119860119891is the frontal area
119888119889is the air resistance coefficient V is the vehicle speed
119875rol(119905) = (119898V +119898119901)119892119888119903 cos(120572(119905))V(119905) is the power to overcomerolling resistance 119875ac(119905) = (119898V + 119898
119901)V(119905)V(119905)(119889V(119905)119889119905)
is the accelerationdeceleration power 119875gr(119905) = (119898V +
119898119901)119892 sin(120572(119905))V(119905) is the updown hill power V is the vehicle
speed 120572 is the road gradient 119898119901
is the battery massand 119875au(119905) is the auxiliaries power including air conditionbattery heat management system heating (seat heating andwindshield heating) lighting control system and brakingsteer consumption The average power of the auxiliaries is10 kW [26] assuming air-conditioning is working
Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Original data
N series data
segments
PretreatmentCharacteristic
values matrix
Calculating characteristic
valuesComponent
score coefficient
matrix
Principal component
analysis
Clustering analysis
Clustering analysis results
First kind
Second kind
Third kind
Extracting representative driving cycle of every kind
Harbin city
driving cycle
Constructing driving cycle
Figure 6 Construction process of Harbin city driving cycle
0 200 400 600 800 1000 1200 140005
101520253035404550
(k
mh
)
t (s)
Figure 7 Harbin city driving cycle
119875(119905) can be divided into two parts one is the dissipatedpower 119875dis(119905) = 119875ae(119905) + 119875rol(119905) + 119875au(119905) and the other isconserved power 119875cons(119905) = 119875ac(119905) + 119875gr(119905) As the initial andfinal altitude and speed are the same in a whole driving cyclethe reserved power is zero If braking energy can be fullyrecycled required traction energy 119864trac should be the sameas the dissipated energy 119864dis
119864trac = int
119905119891
1199050
119875 (119905) 119889119905 = int
119905119891
1199050
119875dis (119905) 119889119905 = 119864dis (7)
where 1199050and 119905119891are initial and final time If there is no barking
energy recycled
119864trac = int
119875(119905)gt0
119875 (119905) 119889119905
= int
119905119891
1199050
119875dis (119905) 119889119905 + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
= 119864dis + int
119875(119905)lt0
(minus119875 (119905)) 119889119905
(8)
where int119875(119905)lt0
(minus119875(119905))119889119905 represents the cycle energy 119864cir whichis the temporal vehicle cycle energy in the form of kineticor potential energy and ultimately dissipated during friction
brakingTherefore (8) for vehicle without energy recycle canbe calculated as
119864trac = 119864dis + 119864cir (9)
In actual driving energy balance equation can be calcu-lated as
119864trac = 119864dis + 119864cir minus 119864rec (10)
where119864rec is the recycled net energy that is usable for tractionAccording to (7) and (10) it can be found that 119864rec = 119864cir
42 Recycle Efficiency of Barking Energy Recycle efficiency isdefined as
120578rec =119864rec119864cir
(11)
As 119864cir can be easily obtained in driving cycle the keymission is to calculate 119864rec Recycle energy consists of twoflow methods input and output As is shown in Figure 4recycle ability is determined by energy dissipation motortorque current of power battery and threshold charge value
Time set 119878 is defined as
119878 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) lt 0 119875
119887 (119905) lt 0 (12)
where 119875au is physical load in converter 119864119908 in is absolute inputenergy during 119878 and is calculated by
119864119908in = int
119878
1003816100381610038161003816119875 (119905) minus 119875au (119905)
1003816100381610038161003816119889119905 (13)
The energy reserved in battery is
119864119887 in = int
119878
10038161003816100381610038161003816119875119887 (119905) + 119868(119905)
2119877119899119888
10038161003816100381610038161003816119889119905 (14)
The energy loss is
119864loss in = 119864119908 in minus 119864
119887 in minus int
119878
119875au (119905) 119889119905 (15)
8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
0 20 40 60 80 100 120 140 160 18010
20
30
40
50
60
70
80
90
100SO
C (
)
s (km)
(a) CD-CS strategy
0 20 40 60 80 100 120 140 160 18020
30
40
50
60
70
80
90
100
SOC
()
s (km)
(b) Blended strategy
Figure 8 The SOC curve with the two different energy management strategies
The cycle-average wheel to battery energy efficiency is
120578wb in = 1 minus
119864loss in
119864119908 in
(16)
The recycle energy reserved in battery is
119864rec in = 119864cir120578wb in120578cir 119908 (17)
where 120578cir 119908 is the ratio between 119864119908and 119864cir
Time set119863 is defined as
119863 = 119905 | 119905 isin [1199050 119905119891] 119875 (119905) minus 119875au (119905) ge 0 119875
119887 (119905) ge 0 (18)
The associated motor energy loss in propelling is
119864loss 119898 = int
119863
119875loss 119898 (119905) 119889119905 (19)
The average motor efficiency is
120578119898 out = 1 minus
119864loss 119898119889
int119863119875119887 (119905) 120578con + 119875apu (119905) 120578con minus 119875au (119905) 119889119905
(20)
The battery energy loss during time119863 is
119864loss 119887 = int
119863
119868(119905)2119877119899119888119889119905 (21)
The battery efficiency in output way is
120578119887out = 1 minus
119864loss 119887119889
int119863119875119887 (119905) + 119868(119905)
2119877119899119887119889119905
(22)
The cycle-average battery to wheel energy efficiency is
120578bw out = 120578119887 out120578con120578119898 out120578119891119889120578119887119898 (23)
where 120578119887119898
is the ratio between the power that batteryprovides to the motor and the power emitted by batteryAccording to (16) and (23) the recycle energy for traction is
119864rec = 119864rec in120578bw out (24)
The cycle-average recycle efficiency is
120578rec =119864rec119864cir
= 120578cir119908120578wb in120578bw out (25)
43 Fuel-Traction Efficiency Fuel-traction efficiency is def-ined as
120578ft =
119864trac119864ef
=
119864dis + (1 minus 120578rec) 119864cir
119864ef (26)
where119864ef is the equal fuel energy the average consumption ofthe sum of diesel and electric energy 120578ft is the cycle-averageconversion efficiency from the total consumed energy to themechanical energy at the wheels and the electrical energy forthe auxiliaries Based on the initial and final SOC 119864ef can bedivided into diesel energy and electric energy
An energy flow chart can clearly show the direction ofenergy flow showing the sizes of losses from each individualpart It is one of the most effective methods for analyzingflow in the context of system performance Referring to theanalysis method in [27] this paper puts forward a powertrainenergy analysis method with energy flow chart for range-extended electric bus The powertrain energy flow chart isshown in Figure 5
5 Analysis Example with the DrivingCycle of Harbin City
To provide a credible reference for the match and controlof the range-extended electric bus energy efficiency analysis
Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
Diesel engine
Generator and rectifier loss
Fuel energy28042
9283
Engine loss
Generator and
11875
18759
100 Motor and motor
Traction motor
controller loss
917
681
Generating loss
8421
2492
6595
Battery
5914
12849
1875
8515
68
897
767
385
Vehicle bridge
331
711Braking energy intheory
4316 Auxiliary
1598
Battery charge
(14817 kWh)
rectifier
Charge
loss
(6102 kWh)
(202 kWh) (4082 kWh)
(5423 kWh)
(8376kWh)
(148kWh)
(1435kWh)
(1547kWh)
(2176kWh)
(408 kWh)
(1853kWh)
1705(3713 kWh)
268(5833kWh)
(3477kWh)(2584 kWh)
(2796 kWh)
(1287 kWh)
(167kWh)
(9393kWh)
Egrid
Figure 9 Energy flow chart with CD-CS strategy
should be carried out within a driving cycle Based on theauthorsrsquo location the Harbin city driving cycle has beenchosen for this paper and the construction process is shownin Figure 6
The constructed Harbin city driving cycle is shown inFigure 7 acceleration and deceleration are frequent Themaximum acceleration is 194ms2 the idle proportion is223 themaximum speed is 50 kmh and the average speedis 145 kmh
The analysis processmainly compares theCD-CS strategywith the switching controlmethod on the range-extender andblended strategy with power following controlmethod on therange-extender According to the research the daily averagerange for Harbin city bus line 101 is 150ndash180 km the initialSOC is 100 and the auxiliariesrsquo power is 10 kW SOC curveswith the two different driving cycles are shown in Figure 8
Figure 9 shows the energy flow chart with CD-CS strat-egy and Figure 10 shows the energy flow chart with blendedstrategy
Based on Figure 5 the input and output recycle efficien-cies can be obtained as is shown in Figure 11 The input-recycled efficiency of the blended strategy is 2473 higherthan that of CD-CS strategy The output-recycled efficiencyof the blended strategy is 783 lower than that of the CD-CSstrategy
Figure 12 consists of recycle efficiency fuel-traction effi-ciency and energy consumptionwith the twodifferent energymanagement strategies As is shown in Figure 12(a) therecycle efficiency is 3680 with CD-CS strategy and 5132with blended strategyWith CD-CS strategy the fuel-tractionefficiency is 3891 but with blended strategy it is 3326The fuel-traction efficiency is limited by engine efficiency and
10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Diesel engine
Generator andrectifier
Traction motor
Fuel energy3028
9333
Engine loss
Generator and rectifier loss
11875
100 Motor and motorcontroller loss
88
1259
Generating loss
842
6595
Battery
5914
942
1875
8217
68
897
1116
20947
Vehicle bridge
3082
2454
711Braking energy intheory
5882 Auxiliary
032
4503
6958
Battery chargeloss202
(6589 kWh)
(2031kWh) (4558kWh)
(534 kWh)
(274 kWh) (1788 kWh)(243kWh)
(1514 kWh)(205 kWh)
(4406kWh) (128 kWh)
(98kWh)
(1287 kWh) (2584 kWh)(07 kWh)
(148kWh)
(1435kWh) (2176kWh)
(408 kWh)
(1547 kWh)
Charge
Egrid
Figure 10 Energy flow chart with blended strategy
65468920
0002000400060008000
10000
CD-CS Blended
Efficiency
()
(a) System input-recycled efficiency
6665
5882
54005600580060006200640066006800
CD-CS Blended
Efficiency
()
(b) System output-recycled efficiency
Figure 11 Comparison of powertrain input- and output-recycled efficiency with different energy management strategies
Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
36805132
000100020003000400050006000
CD-CS Blended
Efficiency(
)
(a) The recycle efficiency in the two different strategies
3819
3326
3000310032003300340035003600370038003900
CD-CS Blended
Efficiency
()
(b) The fuel-traction efficiency in the two different strategies
640650660670680690700710720
CD-CS Blended
Energy (kWh)
66443
7123
(c) The energy consumption in two different strategies
Figure 12 Comparison of recycle efficiency fuel-traction efficiency and energy consumption with different energy management strategies
is also influenced by other electric and mechanical lossessuch as the battery power converter and motor and drivesystem Energy consumption is 66443 kWh with the CD-CS strategy and 4787 kWh lower than that with the blendedstrategy The CD-CS strategy has a better recycle ability andfuel-traction efficiency It is worth noting that the yearly rangeof one bus inHarbin is nearly 70000 km and the energy savedwith the CD-CS strategy would be considerable
6 Conclusions
For a range-extended electric bus developed by TsinghuaUniversity this paper analyzes the energy efficiency withtwo different energy management strategies (CD-CS andblended) using an energy flow chart method Harbin citydriving cycle is taken for analysis The recycle efficiency andfuel-traction efficiency are evaluation indexes
Analysis results from the energy flow chart show thatthe energy loss mainly occurs at the engine Engine energyloss reaches 18759 of the whole driving energy using theCD-CS strategy and 20947 with the blended strategy Asthe CD-CS strategy uses a thermostat control method itscharging loss is 385 of total driving energy while theblended strategy only has a 2 charging loss Of thesetwo energy management strategies the CD-CS strategy caneffectively reduce the engine loss but has a higher chargingloss compared with the blended strategy
Energy efficiency results show that over the Harbin citydriving cycle the input-recycled efficiency of the blendedstrategy is 2473 higher than that of the CD-CS strategyand that the output-recycled efficiency of the blended strategyis 783 lower than that of the CD-CS strategy With theCD-CS strategy the recycle efficiency is 3680 but withblended strategy it is 5132 Using the CD-CS strategy thefuel-traction efficiency is 3891 but with blended strategyit is 3326 In comparison of the two nonoptimized energymanagement strategies powertrain energy efficiency is better
with CD-CS than with blended strategy We suggest that aCD-CS energy management strategy is more appropriate forthe driving conditions on urban Harbin roads
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work is supported by the National Natural ScienceFoundation (NNSF) of China (Grant no 51105220)
References
[1] G Wang ldquoAdvanced vehicles costs energy use and macroe-conomic impactsrdquo Journal of Power Sources vol 196 no 1 pp530ndash540 2011
[2] P Baptista M Tomas and C Silva ldquoPlug-in hybrid fuel cellvehicles market penetration scenariosrdquo International Journal ofHydrogen Energy vol 35 no 18 pp 10024ndash10030 2010
[3] H Li X Jing and H R Karimi ldquoOutput-feedback based 119867infin
control for active suspension systems with control delayrdquo IEEETransactions on Industrial Electronics vol 61 no 1 pp 436ndash4462014
[4] T-W Chun Q-V Tran H-H Lee H-G Kim and E-C NholdquoSimulator for monitoring the operations of range extenderelectric vehiclesrdquo Journal of Power Electronics vol 11 no 4 pp424ndash429 2011
[5] RMatthe L Turner andHMettlach ldquoVOLTECbattery systemfor electric vehicle with extended rangerdquo SAE InternationalJournal of Engines vol 4 no 1 pp 1944ndash1962 2011
[6] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using advanced vehicle simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
[7] X Hu N Murgovski L Johannesson and B Egardt ldquoEnergyefficiency analysis of a series plug-in hybrid electric bus withdifferent energy management strategies and battery sizesrdquoApplied Energy vol 111 pp 1001ndash1009 2013
[8] D H Lee N W Kim and J R Jeong ldquoComponent sizing andengine optimal operation line analysis for a plug-in hybrid elec-tric transit busrdquo International Journal of Automotive Technologyvol 14 no 3 pp 459ndash469 2013
[9] S Varnhagen A Same J Remillard and J W Park ldquoAnumerical investigation on the efficiency of range extendingsystems using Advanced Vehicle Simulatorrdquo Journal of PowerSources vol 196 no 6 pp 3360ndash3370 2011
[10] M Masih-Tehrani M-R Harsquoiri-Yazdi V Esfahanian and HSagha ldquoDevelopment of a hybrid energy storage sizing algo-rithm associated with the evaluation of power managementin different driving cyclesrdquo Journal of Mechanical Science andTechnology vol 26 no 12 pp 4149ndash4159 2012
[11] J Waldner J Wise C Crawford and Z Dong ldquoDevelopmentand testing of an advanced extended range electric vehiclerdquo SAE2011-01-0913 2011
[12] A M Joshi H Ezzat N Bucknor and M Verbrugge ldquoOpti-mizing battery sizing and vehicle lightweighting for an extendedrange electric vehiclerdquo SAE 2011-01-1078 2011
[13] M Cipek M Coric B Skugor J Kasac and J Deur ldquoDynamicprogramming-based optimization of control variables of anextended range electric vehiclerdquo SAE 2013-01-1481 2013
[14] B Skugor and J Deur ldquoInstantaneoun optimization-basedenergymanagement control strategy for extended range electricvehiclerdquo SAE 2013-01-1460 2013
[15] L Xu F Yang andM Hu ldquoComparison of energymanagementstrategies for a range extended electric city busrdquo Journal ofUniversity of Science and Technology of China vol 42 no 8 pp640ndash647 2012
[16] C Hou M Ouyang and L Xu ldquoApproximate Pontryaginrsquosminimum principle applied to the energy management of plug-in hybrid electric vehiclesrdquo Journal of Applied Energy vol 115pp 174ndash189 2014
[17] X Wu J Du and C Hu ldquoEnergy efficiency and fuel economyanalysis of a series hybrid electric bus in different Chinese citydriving cyclesrdquo International Journal of Smart Home vol 7 no5 pp 353ndash368 2013
[18] E D Tate O H Michael and J S Peter ldquoThe electrification ofthe automobile from conventional hybrid to plug-in hybridsto extended-range electric vehiclesrdquo SAE 2008-01-0458 2008
[19] K Dominik P Sylvain and K Jason ldquolsquoFairrsquo comparison ofpowertrain configurations for plug-in hybrid operation usingglobal optimizationrdquo SAE 2009-01-1334 2009
[20] X Wu and L Lu ldquoSystemmatching and simulation of a plug-inseries hybrid electric vehiclerdquo Automotive Engineering vol 35no 7 pp 573ndash582 2013
[21] H-S Xiong G-J Cao L-G Lu M-G Ouyang and J-Q LildquoSimulation system of series hybrid powertrain for city bus andits applicationsrdquo Journal of System Simulation vol 22 no 5 pp1134ndash1138 2010
[22] Q Yang J Huang G Wang and H Reza Karimi ldquoAn adaptivemetamodel-based optimization approach for vehicle suspen-sion system designrdquoMathematical Problems in Engineering vol2014 Article ID 965157 9 pages 2014
[23] J Rubio-Massegu F Palacios-Quinonero J M Rossell andH Reza Karimi ldquoStatic output-feedback control for vehiclesuspensions a single-step linear matrix inequality approachrdquo
Mathematical Problems in Engineering vol 2013 Article ID907056 12 pages 2013
[24] Q Lu H Reza Karimi and K Gunnar Robbersmyr ldquoA data-based approach for modeling and analysis of vehicle collisionby LPV-ARMAX modelsrdquo Journal of Applied Mathematics vol2013 Article ID 452391 9 pages 2013
[25] Z Li L Lu and M Ouyang ldquoComparison of methods forimproving SOC estimation accuracy through an ampere-hourintegeration approachrdquo Journal of Tsinghua University vol 50no 8 pp 1293ndash1301 2010
[26] J CampbellWWatts andDKittelson ldquoReduction of accessoryoverdrive and parasitic loading on a parallel electric hybrid citybusrdquo SAE 2012-01-1005 2012
[27] S Campanari G Manzolini and F Garcia de la IglesialdquoEnergy analysis of electric vehicles using batteries or fuel cellsthrough well-to-wheel driving cycle simulationsrdquo Journal ofPower Sources vol 186 no 2 pp 464ndash477 2009
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of