Embed Size (px)
Citation preview

Research ArticleDynamic Navigation Method with MultisubstationsBased on Doppler Shift
Jianyang Zhao12 Weihong Ding3 Zujun Ding3 Lianfeng Shen4 and Jin Zhao5
1School of Computer Engineering Huaiyin Institute of Technology Huaian Jiangsu 223003 China2Key Lab of National Mobile Communications Southeast University Nanjing Jiangsu 210096 China3School of Electronic and Electrical Engineering Huaiyin Institute of Technology Huaian Jiangsu 223003 China4National Mobile Communications Research Lab Southeast University Nanjing Jiangsu 210096 China5School of Civil Engineering Harbin Institute of Technology Heilongjiang 150000 China
Correspondence should be addressed to Jianyang Zhao jszhaojy163com
Received 9 November 2014 Accepted 26 November 2014
Academic Editor Zidong Wang
Copyright copy 2015 Jianyang Zhao et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The mobile terminals must be compensated for the Doppler effect in their moving communication This special characteristic ofmobile communication can be developed in some new applications This paper proposes methods to realize mobile navigationcalculation via Doppler shifts It gives the theory of relationship between the motion parameters like directions and speed andfrequency shifts caused by multibase stations The simulation illustrates how to compute the movement parameters of numericalcalculation and what should be care for the problem near angle 90 degree It also gives an application with Google map anddynamical locating position and direction on a mobile phone by public wireless network Given the simulation analysis andnavigation test the results show that this method has a good effect
1 Introduction
The problem of Doppler shift should have its dualities Onthe one hand mobile terminal needs to solve the problemof frequency shift to realize the communication Manyliteratures have proposed different calculationmethods aboutfrequency shift in mobile communication Hua Jingyu andYou Xiaohu who are in the National Key Laboratory studyingabout mobile communication in Southeast University utilizea frequency shift calculation system CP-SCBT in [1] bycalculating the concomitant difference of time sequence andan algorithm about estimating the square root of the dynamicwindow oversampling [2] On the other hand since theDoppler shift is related to speed anddirection [3] itmust havevalue in fields of navigation and positioning The research ofthese fields has not been adequately concerned This papertries to find the relationship between the motion parametersand frequency shift of multibase stations and then proposes
a scheme about mobile terminal autonavigation technologyand realization without GPS
At present the major global position systems are GPSand AGPS (assisted GPS) The GPS system receives signalfrom at least three satellites to combine and calculate its ownspace positionTheAGPS is based on network to track recordfor reducing time cost of position and its dependence onsatellites Sakamoto et al once proposed TDOA Locationmethod upon multisubstations [4 5] Some scholars [6ndash8]discuss and illustrate possibilities and fundamental limita-tions with mobile positioning in available wireless networkmeasurements System-specific low-layer techniques for howthese are computed for second generation (2G) and [9 10] forthird generation (3G) can be found respectively
However they have not provided navigation parameterslike speed direction and so forth Mobile system getsnavigation with the best receptivity for the reason thatmobileterminals have provided the real-time estimate of Doppler
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2015 Article ID 245837 5 pageshttpdxdoiorg1011552015245837
2 Discrete Dynamics in Nature and Society
shift in moving process and uses it to optimize the systemparameter Hence the system is applied to frequency channelmeasurement resource allocation handoff decision powercontrol and so on [11ndash13] The research of Doppler shiftnavigation not only gets a good use of mobile terminal fre-quency shift estimation and some correlation properties butalso uses 3G4G mobile communication system to constitutethe mobile navigation system
2 Theory and Calculation ofMobile Navigation
Mobile terminal must estimate Doppler shift which reflectsthe speed of the channel parameter changeWhen themovingof terminal is quicker the Doppler shift is bigger Themobile terminal can automatically compensate the change ofparameter coursed by frequency shift
21 Relationship between Doppler Shift and Parameters Thepurpose of researching the relationship between Dopplershift and position is to apply the result of frequency shiftto estimate navigation and position of mobile terminalThe method is integrated estimating parameters of positionspeed and direction by different frequency shift of severaladjacent base stations to solve the problemofmobile terminalcontinuous dynamic position
It is shown as in Figure 1 that frequency shift transmittingfrequency speed and direction have the following relation-ship known from Doppler effect
119891119889 =119891
119862V sdot cos120572 (1)
In (1) 120572 is the angle between the moving direction ofterminal and spreading direction of signal V is the movingdirection of terminal119862 is spreading direction of electromag-netic wave and 119891 is frequency of carrier
When the usermobile terminalUEmoves in the directionof 11987421198741 at speed of V the frequency shifts 1198911198891 1198911198892 relatedto base stations Nodes 1198611 and 1198612 are produced as in thefollowing equations
1198911198891 =119891
119862V sdot cos1205721
1198911198892 =119891
119862V sdot cos1205722
(2)
The distance of two base stations is 119878 The distancebetween user mobile terminal and base stations Node 1198611 andNode 1198612 can be tested as 1198711 and 1198712 via the phase difference ofmobile terminal pilot frequency yardsThe following formulacan be derived by triangle
cos (1205722 minus 1205721) =11987121+ 11987122minus 1198782
211987111198712 (3)
In theory the frequency shifts 1198911198891 1198911198892 can be measuredand the speed V and direction angles 1205721 1205722 can be calculated
by (4) As a result the position and direction location isrealized
1198911198891 =119891
119862V sdot cos1205721
1198911198892 =119891
119862V sdot cos1205722
cos (1205722 minus 1205721) =11987121+ 11987122minus 1198782
211987111198712
(4)
In fact the calculating process is more complex than thatmentioned above The reason is that (4) is a transcendentalequation It needs appropriate transform and the arithmeticsolution can be obtained by iterative methods
Let
Δ = 1205722 minus 1205721 = cosminus1 (11987121+ 11987122minus 1198782
211987111198712) (5)
The following formula can be achieved by simultaneousequations (4) and (5)
cos1205721 cos1205722 =1
2(cos (1205722 + 1205721) + cos (1205722 minus 1205721))
= (119862
119891V)2
sdot 1198911198891 sdot 1198911198892
(6)
or
cos (21205722 minus Δ) + cosΔ = 2(119862
119891V)2
sdot 1198911198892 sdot 1198911198891
= 2(119862
119891Vsdot 1198911198892)
2
sdot11989111988911198911198892
= 2cos21205722 sdot11989111988911198911198892
= (cos 21205722 + 1) sdot11989111988911198911198892
(7)
Then
cos (21205722 minus Δ) + cosΔ = (cos 21205722 + 1) sdot11989111988911198911198892 (8)
cos 21205722 sdot 1198911198891 minus cos (21205722 minus Δ) sdot 1198911198892 = 1198911198892 sdot cosΔ minus 1198911198891 (9)
It just needs to select different values of the formula1205722 isin [0 180] in the order of the smallest to the largest andthen calculate the value of the two ends When the differentvalue reaches the required error the value is the solutionas (9) Then all will be calculated when substituting 1205722 toformula (3) The speed V and direction angles 1205721 1205722 willbe calculated through (2) The moving parameter can beexpressed according to119872(V 1205721 1205722)
Discrete Dynamics in Nature and Society 3
UE
Node B1Node B2
L2
L1
O2
O1
d1
UE998400
d2 cos(120572 1
)
cos(120572
2 )
S
1205721
1205722
Figure 1 Relationship between mobile terminal and base station
22 The Parameter Calculation Steps of Mobile TerminalNavigation and Position
Step 1 Receive the carrier frequency signals of the two basestations through antenna unit and then calculate frequencyshifts 1198911198891 1198911198892 At last calculate 1205721 1205722 through formula (2)
Step 2 If it receives signal from only one base station it needsto test frequency shift 1198911198891 (or 1198911198892) to confirm 1205721 (or 1205722) Andthen using equations (2) and (9) calculate the 1198911198892 (or 1198911198891) ofthe neighboring base station and 1205722 (or 1205721)
Step 3 Calculate1198711minus1198712 bymeasuring cost time from stationsto moving terminal and then calculate the 1198711 1198712 with (5)
Step 4 Calculate speed V and direction angles 1205721 1205722 Therelative position of the mobile terminal 119901(119909 119910) can becalculated when using 119872(V 1205721 1205722) expressing the movingparameter If 1198611(1199091 1199101) 1198612(1199092 1199102) are known then
11987121minus (119909 minus 1199091)
2minus (119910 minus 1199101)
2= 0
11987122minus (119909 minus 1199092)
2minus (119910 minus 1199102)
2= 0
(10)
It is expressed in parameter form as follows
119901 (119909 119910) = 119891 (1198611 1198612 1198711 1198712) (11)
3 Simulation Analysis and Navigation Test
31 Case I Navigation Parameters Calculating If 119878 = 5 km1198711 = 4 km 1198712 = 3 km 1198911198891 = 104Hz and 1198911198892 = minus38Hzsimulation calculation will get the following
V = 599773 kmh 1205722 = 1100079 degrees and 1205721 =200079 degreesor V = 17049119890 + 004 1205722 = 900117 and 1205721 = 00117
The second solution speed above is out of reality obvi-ously The reason is that there is a critical problem when 1205722is close to 90 degrees The change of 1198911 is so quick that tinycalculation errorwill cause a big error of the speed calculationwhile 1205722 is near 90 degrees
0 20 40 60 80 100 120 140 160 180
0
100
200
300
400
500
minus100
minus200
minus300
minus400
y2 = fd2 middot cos(Δ)
y1 = cos(21205722) middot fd1 minus cos(21205722 minus Δ) middotfd2
Freq
uenc
y (H
z)
fd1minus
1205722 angles (deg)
Figure 2 Relationship between direction angle and frequency shiftin the moving process
Table 1 Data range of direction angles and frequency shifts
1205721 1198911198891 1205722 1198911198892 11987421198741 direction
[0 90] ge0 [0sim90] ge0Synchrony(90sim180] lt0
(90 180] lt0 [90sim180] lt0[0sim90] ge0
[0 90] ge0Reverse(90sim180] lt0
[90sim180] lt0 (90 180] lt0
32 Case II Navigation Parameters Calculating If UE as MT(mobile terminal) moves in the 11987421198741 direction the solution1205722 one of the MT moving parameters 1205722 will be the pointof intersection Distance of UE to base stations Node 1198611 andNode 1198612 is that 1198891 = 2 1198892 = 4 As shown in Figure 2 thereare two points of intersection of line 1199101 and line 1199102 One isclose to 90 degrees and the other is the solution we requireThe test process needs to consider this situationThemethodsof continuous forward and backward ruin are needed to solvethis problem The detailed discussion is shown as follows
Direction angles 1205721 and 1205722 of the equation solution mayhave two solutions At the time we need to use the positiveor negative of the frequency as judgment The total possibleconditions are shown in Table 1 When 1205722 is close to 90degrees the arithmetic of example will be replaced by curveruin method to get the approximate solution
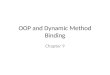
33 Test of Navigation System As shown in Figure 3 HuaihaiSouth Road from (334980 1190258) to (335646 1190323)is selected for testing The distance between base stations 1198611and1198612 is 338208 kmWhen the car with test terminal reachespoint 119872 the calculation has been finished and shown asfollows
V = 60 kmh
120572 = minus86
119872 = (335293 119 0300)
(12)
4 Discrete Dynamics in Nature and Society
(335352 1190192)
(335073 1190091)
B2
B1
L1 =
L2 =
242353km
206637km
S =338208 km
O2
O1
M = (335293 1190300)
M
1205721205721
120572 2
d2
d1
= 60kmh120572 = minus86
Figure 3 In-vehicle navigation showing with position verification
The real speed is 608 kmh The traffic map and nav-igation marks are produced by calculation The test mapcomes from Google Before the system running sign fourGPS points of themapwhich is 100 times bigger than the usedpart In the test process select a partmapnearing pointMandthen send it to MT after overlying calculation
4 Conclusions
MT automatically adapts the Doppler effects which can playa role in navigation and positioningThen theMT gets value-added functions after adding little resource spending Theo-retical analysis and simulation results show that MT positionmethod is feasible Compared with GPS position methodthe benefit of this strategy is the straightway use of mobilechannel to transmit navigation and position informationwithout special GPS receiver or communication networkThestrategy of navigation position based on cloud platform isfeasible through test checking
The futurework is about combiningnavigation arithmeticof self-adaption signal in the condition of multiroad pilot
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work has been supported by the National High Tech-nology Research and Development Program of China (863Program) (no 2008A A01Z205) and the National NaturalScience Foundation of China (no 61171081)
References
[1] H Jingyu Y Xiaohu S Bin and Y H Kim ldquoA scheme forthe Doppler shift estimation despite the power control inmobile communication systemsrdquo inProceedings of the IEEE 59thVehicular Technology Conference (VTC 04) vol 1 pp 284ndash288May 2004
[2] J A Jahanshahi S A Ghorashi and H Sadreazami ldquoJammingdetection at base station using fuzzy c-means algorithmrdquo inPro-ceedings of the International Symposium on Computer Networksand Distributed Systems (CNDS rsquo11) pp 40ndash44 Tehran IranFebruary 2011
[3] M D Austin and G L Stuber ldquoVelocity adaptive handoffalgorithms for microcellular systemsrdquo IEEE Transactions onVehicular Technology vol 43 no 3 pp 549ndash561 1994
[4] M Sakamoto J Huoponen I Niva et al ldquoAdaptive channelestimation with velocity estimator for WCDMA recieverrdquo inProceedings of the IEEE Vehicular Technology Conference vol 3pp 15ndash18 2000
Discrete Dynamics in Nature and Society 5
[5] S Yin G Wang and X Yang ldquoRobust PLS approach for KPI-related prediction and diagnosis against outliers and missingdatardquo International Journal of Systems Science vol 45 no 7 pp1375ndash1382 2014
[6] F Gustafsson and F Gunnarsson ldquoMobile positioning usingwireless networks possibilities and fundamental limitationsbased on availablewireless networkmeasurementsrdquo IEEE SignalProcessing Magazine vol 22 no 4 pp 41ndash53 2005
[7] A H Sayed A Tarighat and N Khajehnouri ldquoNetwork-basedwireless location challenges faced in developing techniques foraccurate wireless location informationrdquo IEEE Signal ProcessingMagazine vol 22 no 4 pp 24ndash40 2005
[8] J Wang H Zhao Y Bi X Chen R Zeng and S Shao ldquoQuad-rotor helicopter autonomous navigation based on vanishingpoint algorithmrdquo Journal of Applied Mathematics vol 2014Article ID 567057 12 pages 2014
[9] Y Zhao ldquoStandardization of mobile phone positioning for 3Gsystemsrdquo IEEE Communications Magazine vol 40 no 7 pp108ndash116 2002
[10] J J CafferyWireless Location in CDMA Cellular Radio SystemsKluwer Academic Publishers Norwell Mass USA 1999
[11] S Catreux V Erceg D Gesbert and R W Heath Jr ldquoAdaptivemodulation and MIMO coding for broadband wireless datanetworksrdquo IEEE Communications Magazine vol 40 no 6 pp108ndash115 2002
[12] S Yin and Z Huang ldquoPerformance monitoring for vehicle sus-pension system via fuzzy positivistic C-means clustering basedon accelerometer measurementsrdquo IEEEASME Transactions onMechatronics vol PP no 99 pp 1ndash8 2014
[13] S Yin X Zhu and O Kaynak ldquoImproved PLS focused on keyperformance indictor related fault diagnosisrdquo IEEE Transac-tions on Industrial Electronics no 99 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
shift in moving process and uses it to optimize the systemparameter Hence the system is applied to frequency channelmeasurement resource allocation handoff decision powercontrol and so on [11ndash13] The research of Doppler shiftnavigation not only gets a good use of mobile terminal fre-quency shift estimation and some correlation properties butalso uses 3G4G mobile communication system to constitutethe mobile navigation system
2 Theory and Calculation ofMobile Navigation
Mobile terminal must estimate Doppler shift which reflectsthe speed of the channel parameter changeWhen themovingof terminal is quicker the Doppler shift is bigger Themobile terminal can automatically compensate the change ofparameter coursed by frequency shift
21 Relationship between Doppler Shift and Parameters Thepurpose of researching the relationship between Dopplershift and position is to apply the result of frequency shiftto estimate navigation and position of mobile terminalThe method is integrated estimating parameters of positionspeed and direction by different frequency shift of severaladjacent base stations to solve the problemofmobile terminalcontinuous dynamic position
It is shown as in Figure 1 that frequency shift transmittingfrequency speed and direction have the following relation-ship known from Doppler effect
119891119889 =119891
119862V sdot cos120572 (1)
In (1) 120572 is the angle between the moving direction ofterminal and spreading direction of signal V is the movingdirection of terminal119862 is spreading direction of electromag-netic wave and 119891 is frequency of carrier
When the usermobile terminalUEmoves in the directionof 11987421198741 at speed of V the frequency shifts 1198911198891 1198911198892 relatedto base stations Nodes 1198611 and 1198612 are produced as in thefollowing equations
1198911198891 =119891
119862V sdot cos1205721
1198911198892 =119891
119862V sdot cos1205722
(2)
The distance of two base stations is 119878 The distancebetween user mobile terminal and base stations Node 1198611 andNode 1198612 can be tested as 1198711 and 1198712 via the phase difference ofmobile terminal pilot frequency yardsThe following formulacan be derived by triangle
cos (1205722 minus 1205721) =11987121+ 11987122minus 1198782
211987111198712 (3)
In theory the frequency shifts 1198911198891 1198911198892 can be measuredand the speed V and direction angles 1205721 1205722 can be calculated
by (4) As a result the position and direction location isrealized
1198911198891 =119891
119862V sdot cos1205721
1198911198892 =119891
119862V sdot cos1205722
cos (1205722 minus 1205721) =11987121+ 11987122minus 1198782
211987111198712
(4)
In fact the calculating process is more complex than thatmentioned above The reason is that (4) is a transcendentalequation It needs appropriate transform and the arithmeticsolution can be obtained by iterative methods
Let
Δ = 1205722 minus 1205721 = cosminus1 (11987121+ 11987122minus 1198782
211987111198712) (5)
The following formula can be achieved by simultaneousequations (4) and (5)
cos1205721 cos1205722 =1
2(cos (1205722 + 1205721) + cos (1205722 minus 1205721))
= (119862
119891V)2
sdot 1198911198891 sdot 1198911198892
(6)
or
cos (21205722 minus Δ) + cosΔ = 2(119862
119891V)2
sdot 1198911198892 sdot 1198911198891
= 2(119862
119891Vsdot 1198911198892)
2
sdot11989111988911198911198892
= 2cos21205722 sdot11989111988911198911198892
= (cos 21205722 + 1) sdot11989111988911198911198892
(7)
Then
cos (21205722 minus Δ) + cosΔ = (cos 21205722 + 1) sdot11989111988911198911198892 (8)
cos 21205722 sdot 1198911198891 minus cos (21205722 minus Δ) sdot 1198911198892 = 1198911198892 sdot cosΔ minus 1198911198891 (9)
It just needs to select different values of the formula1205722 isin [0 180] in the order of the smallest to the largest andthen calculate the value of the two ends When the differentvalue reaches the required error the value is the solutionas (9) Then all will be calculated when substituting 1205722 toformula (3) The speed V and direction angles 1205721 1205722 willbe calculated through (2) The moving parameter can beexpressed according to119872(V 1205721 1205722)
Discrete Dynamics in Nature and Society 3
UE
Node B1Node B2
L2
L1
O2
O1
d1
UE998400
d2 cos(120572 1
)
cos(120572
2 )
S
1205721
1205722
Figure 1 Relationship between mobile terminal and base station
22 The Parameter Calculation Steps of Mobile TerminalNavigation and Position
Step 1 Receive the carrier frequency signals of the two basestations through antenna unit and then calculate frequencyshifts 1198911198891 1198911198892 At last calculate 1205721 1205722 through formula (2)
Step 2 If it receives signal from only one base station it needsto test frequency shift 1198911198891 (or 1198911198892) to confirm 1205721 (or 1205722) Andthen using equations (2) and (9) calculate the 1198911198892 (or 1198911198891) ofthe neighboring base station and 1205722 (or 1205721)
Step 3 Calculate1198711minus1198712 bymeasuring cost time from stationsto moving terminal and then calculate the 1198711 1198712 with (5)
Step 4 Calculate speed V and direction angles 1205721 1205722 Therelative position of the mobile terminal 119901(119909 119910) can becalculated when using 119872(V 1205721 1205722) expressing the movingparameter If 1198611(1199091 1199101) 1198612(1199092 1199102) are known then
11987121minus (119909 minus 1199091)
2minus (119910 minus 1199101)
2= 0
11987122minus (119909 minus 1199092)
2minus (119910 minus 1199102)
2= 0
(10)
It is expressed in parameter form as follows
119901 (119909 119910) = 119891 (1198611 1198612 1198711 1198712) (11)
3 Simulation Analysis and Navigation Test
31 Case I Navigation Parameters Calculating If 119878 = 5 km1198711 = 4 km 1198712 = 3 km 1198911198891 = 104Hz and 1198911198892 = minus38Hzsimulation calculation will get the following
V = 599773 kmh 1205722 = 1100079 degrees and 1205721 =200079 degreesor V = 17049119890 + 004 1205722 = 900117 and 1205721 = 00117
The second solution speed above is out of reality obvi-ously The reason is that there is a critical problem when 1205722is close to 90 degrees The change of 1198911 is so quick that tinycalculation errorwill cause a big error of the speed calculationwhile 1205722 is near 90 degrees
0 20 40 60 80 100 120 140 160 180
0
100
200
300
400
500
minus100
minus200
minus300
minus400
y2 = fd2 middot cos(Δ)
y1 = cos(21205722) middot fd1 minus cos(21205722 minus Δ) middotfd2
Freq
uenc
y (H
z)
fd1minus
1205722 angles (deg)
Figure 2 Relationship between direction angle and frequency shiftin the moving process
Table 1 Data range of direction angles and frequency shifts
1205721 1198911198891 1205722 1198911198892 11987421198741 direction
[0 90] ge0 [0sim90] ge0Synchrony(90sim180] lt0
(90 180] lt0 [90sim180] lt0[0sim90] ge0
[0 90] ge0Reverse(90sim180] lt0
[90sim180] lt0 (90 180] lt0
32 Case II Navigation Parameters Calculating If UE as MT(mobile terminal) moves in the 11987421198741 direction the solution1205722 one of the MT moving parameters 1205722 will be the pointof intersection Distance of UE to base stations Node 1198611 andNode 1198612 is that 1198891 = 2 1198892 = 4 As shown in Figure 2 thereare two points of intersection of line 1199101 and line 1199102 One isclose to 90 degrees and the other is the solution we requireThe test process needs to consider this situationThemethodsof continuous forward and backward ruin are needed to solvethis problem The detailed discussion is shown as follows
Direction angles 1205721 and 1205722 of the equation solution mayhave two solutions At the time we need to use the positiveor negative of the frequency as judgment The total possibleconditions are shown in Table 1 When 1205722 is close to 90degrees the arithmetic of example will be replaced by curveruin method to get the approximate solution
33 Test of Navigation System As shown in Figure 3 HuaihaiSouth Road from (334980 1190258) to (335646 1190323)is selected for testing The distance between base stations 1198611and1198612 is 338208 kmWhen the car with test terminal reachespoint 119872 the calculation has been finished and shown asfollows
V = 60 kmh
120572 = minus86
119872 = (335293 119 0300)
(12)
4 Discrete Dynamics in Nature and Society
(335352 1190192)
(335073 1190091)
B2
B1
L1 =
L2 =
242353km
206637km
S =338208 km
O2
O1
M = (335293 1190300)
M
1205721205721
120572 2
d2
d1
= 60kmh120572 = minus86
Figure 3 In-vehicle navigation showing with position verification
The real speed is 608 kmh The traffic map and nav-igation marks are produced by calculation The test mapcomes from Google Before the system running sign fourGPS points of themapwhich is 100 times bigger than the usedpart In the test process select a partmapnearing pointMandthen send it to MT after overlying calculation
4 Conclusions
MT automatically adapts the Doppler effects which can playa role in navigation and positioningThen theMT gets value-added functions after adding little resource spending Theo-retical analysis and simulation results show that MT positionmethod is feasible Compared with GPS position methodthe benefit of this strategy is the straightway use of mobilechannel to transmit navigation and position informationwithout special GPS receiver or communication networkThestrategy of navigation position based on cloud platform isfeasible through test checking
The futurework is about combiningnavigation arithmeticof self-adaption signal in the condition of multiroad pilot
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work has been supported by the National High Tech-nology Research and Development Program of China (863Program) (no 2008A A01Z205) and the National NaturalScience Foundation of China (no 61171081)
References
[1] H Jingyu Y Xiaohu S Bin and Y H Kim ldquoA scheme forthe Doppler shift estimation despite the power control inmobile communication systemsrdquo inProceedings of the IEEE 59thVehicular Technology Conference (VTC 04) vol 1 pp 284ndash288May 2004
[2] J A Jahanshahi S A Ghorashi and H Sadreazami ldquoJammingdetection at base station using fuzzy c-means algorithmrdquo inPro-ceedings of the International Symposium on Computer Networksand Distributed Systems (CNDS rsquo11) pp 40ndash44 Tehran IranFebruary 2011
[3] M D Austin and G L Stuber ldquoVelocity adaptive handoffalgorithms for microcellular systemsrdquo IEEE Transactions onVehicular Technology vol 43 no 3 pp 549ndash561 1994
[4] M Sakamoto J Huoponen I Niva et al ldquoAdaptive channelestimation with velocity estimator for WCDMA recieverrdquo inProceedings of the IEEE Vehicular Technology Conference vol 3pp 15ndash18 2000
Discrete Dynamics in Nature and Society 5
[5] S Yin G Wang and X Yang ldquoRobust PLS approach for KPI-related prediction and diagnosis against outliers and missingdatardquo International Journal of Systems Science vol 45 no 7 pp1375ndash1382 2014
[6] F Gustafsson and F Gunnarsson ldquoMobile positioning usingwireless networks possibilities and fundamental limitationsbased on availablewireless networkmeasurementsrdquo IEEE SignalProcessing Magazine vol 22 no 4 pp 41ndash53 2005
[7] A H Sayed A Tarighat and N Khajehnouri ldquoNetwork-basedwireless location challenges faced in developing techniques foraccurate wireless location informationrdquo IEEE Signal ProcessingMagazine vol 22 no 4 pp 24ndash40 2005
[8] J Wang H Zhao Y Bi X Chen R Zeng and S Shao ldquoQuad-rotor helicopter autonomous navigation based on vanishingpoint algorithmrdquo Journal of Applied Mathematics vol 2014Article ID 567057 12 pages 2014
[9] Y Zhao ldquoStandardization of mobile phone positioning for 3Gsystemsrdquo IEEE Communications Magazine vol 40 no 7 pp108ndash116 2002
[10] J J CafferyWireless Location in CDMA Cellular Radio SystemsKluwer Academic Publishers Norwell Mass USA 1999
[11] S Catreux V Erceg D Gesbert and R W Heath Jr ldquoAdaptivemodulation and MIMO coding for broadband wireless datanetworksrdquo IEEE Communications Magazine vol 40 no 6 pp108ndash115 2002
[12] S Yin and Z Huang ldquoPerformance monitoring for vehicle sus-pension system via fuzzy positivistic C-means clustering basedon accelerometer measurementsrdquo IEEEASME Transactions onMechatronics vol PP no 99 pp 1ndash8 2014
[13] S Yin X Zhu and O Kaynak ldquoImproved PLS focused on keyperformance indictor related fault diagnosisrdquo IEEE Transac-tions on Industrial Electronics no 99 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
UE
Node B1Node B2
L2
L1
O2
O1
d1
UE998400
d2 cos(120572 1
)
cos(120572
2 )
S
1205721
1205722
Figure 1 Relationship between mobile terminal and base station
22 The Parameter Calculation Steps of Mobile TerminalNavigation and Position
Step 1 Receive the carrier frequency signals of the two basestations through antenna unit and then calculate frequencyshifts 1198911198891 1198911198892 At last calculate 1205721 1205722 through formula (2)
Step 2 If it receives signal from only one base station it needsto test frequency shift 1198911198891 (or 1198911198892) to confirm 1205721 (or 1205722) Andthen using equations (2) and (9) calculate the 1198911198892 (or 1198911198891) ofthe neighboring base station and 1205722 (or 1205721)
Step 3 Calculate1198711minus1198712 bymeasuring cost time from stationsto moving terminal and then calculate the 1198711 1198712 with (5)
Step 4 Calculate speed V and direction angles 1205721 1205722 Therelative position of the mobile terminal 119901(119909 119910) can becalculated when using 119872(V 1205721 1205722) expressing the movingparameter If 1198611(1199091 1199101) 1198612(1199092 1199102) are known then
11987121minus (119909 minus 1199091)
2minus (119910 minus 1199101)
2= 0
11987122minus (119909 minus 1199092)
2minus (119910 minus 1199102)
2= 0
(10)
It is expressed in parameter form as follows
119901 (119909 119910) = 119891 (1198611 1198612 1198711 1198712) (11)
3 Simulation Analysis and Navigation Test
31 Case I Navigation Parameters Calculating If 119878 = 5 km1198711 = 4 km 1198712 = 3 km 1198911198891 = 104Hz and 1198911198892 = minus38Hzsimulation calculation will get the following
V = 599773 kmh 1205722 = 1100079 degrees and 1205721 =200079 degreesor V = 17049119890 + 004 1205722 = 900117 and 1205721 = 00117
The second solution speed above is out of reality obvi-ously The reason is that there is a critical problem when 1205722is close to 90 degrees The change of 1198911 is so quick that tinycalculation errorwill cause a big error of the speed calculationwhile 1205722 is near 90 degrees
0 20 40 60 80 100 120 140 160 180
0
100
200
300
400
500
minus100
minus200
minus300
minus400
y2 = fd2 middot cos(Δ)
y1 = cos(21205722) middot fd1 minus cos(21205722 minus Δ) middotfd2
Freq
uenc
y (H
z)
fd1minus
1205722 angles (deg)
Figure 2 Relationship between direction angle and frequency shiftin the moving process
Table 1 Data range of direction angles and frequency shifts
1205721 1198911198891 1205722 1198911198892 11987421198741 direction
[0 90] ge0 [0sim90] ge0Synchrony(90sim180] lt0
(90 180] lt0 [90sim180] lt0[0sim90] ge0
[0 90] ge0Reverse(90sim180] lt0
[90sim180] lt0 (90 180] lt0
32 Case II Navigation Parameters Calculating If UE as MT(mobile terminal) moves in the 11987421198741 direction the solution1205722 one of the MT moving parameters 1205722 will be the pointof intersection Distance of UE to base stations Node 1198611 andNode 1198612 is that 1198891 = 2 1198892 = 4 As shown in Figure 2 thereare two points of intersection of line 1199101 and line 1199102 One isclose to 90 degrees and the other is the solution we requireThe test process needs to consider this situationThemethodsof continuous forward and backward ruin are needed to solvethis problem The detailed discussion is shown as follows
Direction angles 1205721 and 1205722 of the equation solution mayhave two solutions At the time we need to use the positiveor negative of the frequency as judgment The total possibleconditions are shown in Table 1 When 1205722 is close to 90degrees the arithmetic of example will be replaced by curveruin method to get the approximate solution
33 Test of Navigation System As shown in Figure 3 HuaihaiSouth Road from (334980 1190258) to (335646 1190323)is selected for testing The distance between base stations 1198611and1198612 is 338208 kmWhen the car with test terminal reachespoint 119872 the calculation has been finished and shown asfollows
V = 60 kmh
120572 = minus86
119872 = (335293 119 0300)
(12)
4 Discrete Dynamics in Nature and Society
(335352 1190192)
(335073 1190091)
B2
B1
L1 =
L2 =
242353km
206637km
S =338208 km
O2
O1
M = (335293 1190300)
M
1205721205721
120572 2
d2
d1
= 60kmh120572 = minus86
Figure 3 In-vehicle navigation showing with position verification
The real speed is 608 kmh The traffic map and nav-igation marks are produced by calculation The test mapcomes from Google Before the system running sign fourGPS points of themapwhich is 100 times bigger than the usedpart In the test process select a partmapnearing pointMandthen send it to MT after overlying calculation
4 Conclusions
MT automatically adapts the Doppler effects which can playa role in navigation and positioningThen theMT gets value-added functions after adding little resource spending Theo-retical analysis and simulation results show that MT positionmethod is feasible Compared with GPS position methodthe benefit of this strategy is the straightway use of mobilechannel to transmit navigation and position informationwithout special GPS receiver or communication networkThestrategy of navigation position based on cloud platform isfeasible through test checking
The futurework is about combiningnavigation arithmeticof self-adaption signal in the condition of multiroad pilot
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work has been supported by the National High Tech-nology Research and Development Program of China (863Program) (no 2008A A01Z205) and the National NaturalScience Foundation of China (no 61171081)
References
[1] H Jingyu Y Xiaohu S Bin and Y H Kim ldquoA scheme forthe Doppler shift estimation despite the power control inmobile communication systemsrdquo inProceedings of the IEEE 59thVehicular Technology Conference (VTC 04) vol 1 pp 284ndash288May 2004
[2] J A Jahanshahi S A Ghorashi and H Sadreazami ldquoJammingdetection at base station using fuzzy c-means algorithmrdquo inPro-ceedings of the International Symposium on Computer Networksand Distributed Systems (CNDS rsquo11) pp 40ndash44 Tehran IranFebruary 2011
[3] M D Austin and G L Stuber ldquoVelocity adaptive handoffalgorithms for microcellular systemsrdquo IEEE Transactions onVehicular Technology vol 43 no 3 pp 549ndash561 1994
[4] M Sakamoto J Huoponen I Niva et al ldquoAdaptive channelestimation with velocity estimator for WCDMA recieverrdquo inProceedings of the IEEE Vehicular Technology Conference vol 3pp 15ndash18 2000
Discrete Dynamics in Nature and Society 5
[5] S Yin G Wang and X Yang ldquoRobust PLS approach for KPI-related prediction and diagnosis against outliers and missingdatardquo International Journal of Systems Science vol 45 no 7 pp1375ndash1382 2014
[6] F Gustafsson and F Gunnarsson ldquoMobile positioning usingwireless networks possibilities and fundamental limitationsbased on availablewireless networkmeasurementsrdquo IEEE SignalProcessing Magazine vol 22 no 4 pp 41ndash53 2005
[7] A H Sayed A Tarighat and N Khajehnouri ldquoNetwork-basedwireless location challenges faced in developing techniques foraccurate wireless location informationrdquo IEEE Signal ProcessingMagazine vol 22 no 4 pp 24ndash40 2005
[8] J Wang H Zhao Y Bi X Chen R Zeng and S Shao ldquoQuad-rotor helicopter autonomous navigation based on vanishingpoint algorithmrdquo Journal of Applied Mathematics vol 2014Article ID 567057 12 pages 2014
[9] Y Zhao ldquoStandardization of mobile phone positioning for 3Gsystemsrdquo IEEE Communications Magazine vol 40 no 7 pp108ndash116 2002
[10] J J CafferyWireless Location in CDMA Cellular Radio SystemsKluwer Academic Publishers Norwell Mass USA 1999
[11] S Catreux V Erceg D Gesbert and R W Heath Jr ldquoAdaptivemodulation and MIMO coding for broadband wireless datanetworksrdquo IEEE Communications Magazine vol 40 no 6 pp108ndash115 2002
[12] S Yin and Z Huang ldquoPerformance monitoring for vehicle sus-pension system via fuzzy positivistic C-means clustering basedon accelerometer measurementsrdquo IEEEASME Transactions onMechatronics vol PP no 99 pp 1ndash8 2014
[13] S Yin X Zhu and O Kaynak ldquoImproved PLS focused on keyperformance indictor related fault diagnosisrdquo IEEE Transac-tions on Industrial Electronics no 99 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
(335352 1190192)
(335073 1190091)
B2
B1
L1 =
L2 =
242353km
206637km
S =338208 km
O2
O1
M = (335293 1190300)
M
1205721205721
120572 2
d2
d1
= 60kmh120572 = minus86
Figure 3 In-vehicle navigation showing with position verification
The real speed is 608 kmh The traffic map and nav-igation marks are produced by calculation The test mapcomes from Google Before the system running sign fourGPS points of themapwhich is 100 times bigger than the usedpart In the test process select a partmapnearing pointMandthen send it to MT after overlying calculation
4 Conclusions
MT automatically adapts the Doppler effects which can playa role in navigation and positioningThen theMT gets value-added functions after adding little resource spending Theo-retical analysis and simulation results show that MT positionmethod is feasible Compared with GPS position methodthe benefit of this strategy is the straightway use of mobilechannel to transmit navigation and position informationwithout special GPS receiver or communication networkThestrategy of navigation position based on cloud platform isfeasible through test checking
The futurework is about combiningnavigation arithmeticof self-adaption signal in the condition of multiroad pilot
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work has been supported by the National High Tech-nology Research and Development Program of China (863Program) (no 2008A A01Z205) and the National NaturalScience Foundation of China (no 61171081)
References
[1] H Jingyu Y Xiaohu S Bin and Y H Kim ldquoA scheme forthe Doppler shift estimation despite the power control inmobile communication systemsrdquo inProceedings of the IEEE 59thVehicular Technology Conference (VTC 04) vol 1 pp 284ndash288May 2004
[2] J A Jahanshahi S A Ghorashi and H Sadreazami ldquoJammingdetection at base station using fuzzy c-means algorithmrdquo inPro-ceedings of the International Symposium on Computer Networksand Distributed Systems (CNDS rsquo11) pp 40ndash44 Tehran IranFebruary 2011
[3] M D Austin and G L Stuber ldquoVelocity adaptive handoffalgorithms for microcellular systemsrdquo IEEE Transactions onVehicular Technology vol 43 no 3 pp 549ndash561 1994
[4] M Sakamoto J Huoponen I Niva et al ldquoAdaptive channelestimation with velocity estimator for WCDMA recieverrdquo inProceedings of the IEEE Vehicular Technology Conference vol 3pp 15ndash18 2000
Discrete Dynamics in Nature and Society 5
[5] S Yin G Wang and X Yang ldquoRobust PLS approach for KPI-related prediction and diagnosis against outliers and missingdatardquo International Journal of Systems Science vol 45 no 7 pp1375ndash1382 2014
[6] F Gustafsson and F Gunnarsson ldquoMobile positioning usingwireless networks possibilities and fundamental limitationsbased on availablewireless networkmeasurementsrdquo IEEE SignalProcessing Magazine vol 22 no 4 pp 41ndash53 2005
[7] A H Sayed A Tarighat and N Khajehnouri ldquoNetwork-basedwireless location challenges faced in developing techniques foraccurate wireless location informationrdquo IEEE Signal ProcessingMagazine vol 22 no 4 pp 24ndash40 2005
[8] J Wang H Zhao Y Bi X Chen R Zeng and S Shao ldquoQuad-rotor helicopter autonomous navigation based on vanishingpoint algorithmrdquo Journal of Applied Mathematics vol 2014Article ID 567057 12 pages 2014
[9] Y Zhao ldquoStandardization of mobile phone positioning for 3Gsystemsrdquo IEEE Communications Magazine vol 40 no 7 pp108ndash116 2002
[10] J J CafferyWireless Location in CDMA Cellular Radio SystemsKluwer Academic Publishers Norwell Mass USA 1999
[11] S Catreux V Erceg D Gesbert and R W Heath Jr ldquoAdaptivemodulation and MIMO coding for broadband wireless datanetworksrdquo IEEE Communications Magazine vol 40 no 6 pp108ndash115 2002
[12] S Yin and Z Huang ldquoPerformance monitoring for vehicle sus-pension system via fuzzy positivistic C-means clustering basedon accelerometer measurementsrdquo IEEEASME Transactions onMechatronics vol PP no 99 pp 1ndash8 2014
[13] S Yin X Zhu and O Kaynak ldquoImproved PLS focused on keyperformance indictor related fault diagnosisrdquo IEEE Transac-tions on Industrial Electronics no 99 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
[5] S Yin G Wang and X Yang ldquoRobust PLS approach for KPI-related prediction and diagnosis against outliers and missingdatardquo International Journal of Systems Science vol 45 no 7 pp1375ndash1382 2014
[6] F Gustafsson and F Gunnarsson ldquoMobile positioning usingwireless networks possibilities and fundamental limitationsbased on availablewireless networkmeasurementsrdquo IEEE SignalProcessing Magazine vol 22 no 4 pp 41ndash53 2005
[7] A H Sayed A Tarighat and N Khajehnouri ldquoNetwork-basedwireless location challenges faced in developing techniques foraccurate wireless location informationrdquo IEEE Signal ProcessingMagazine vol 22 no 4 pp 24ndash40 2005
[8] J Wang H Zhao Y Bi X Chen R Zeng and S Shao ldquoQuad-rotor helicopter autonomous navigation based on vanishingpoint algorithmrdquo Journal of Applied Mathematics vol 2014Article ID 567057 12 pages 2014
[9] Y Zhao ldquoStandardization of mobile phone positioning for 3Gsystemsrdquo IEEE Communications Magazine vol 40 no 7 pp108ndash116 2002
[10] J J CafferyWireless Location in CDMA Cellular Radio SystemsKluwer Academic Publishers Norwell Mass USA 1999
[11] S Catreux V Erceg D Gesbert and R W Heath Jr ldquoAdaptivemodulation and MIMO coding for broadband wireless datanetworksrdquo IEEE Communications Magazine vol 40 no 6 pp108ndash115 2002
[12] S Yin and Z Huang ldquoPerformance monitoring for vehicle sus-pension system via fuzzy positivistic C-means clustering basedon accelerometer measurementsrdquo IEEEASME Transactions onMechatronics vol PP no 99 pp 1ndash8 2014
[13] S Yin X Zhu and O Kaynak ldquoImproved PLS focused on keyperformance indictor related fault diagnosisrdquo IEEE Transac-tions on Industrial Electronics no 99 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of