-
Research ArticleDynamic Modeling and Simulation ofa
Thermoelectric-Solar Hybrid Energy System Usingan Inverse Dynamic
Analysis Input Shaper
A. M. Yusop, R. Mohamed, A. Ayob, and A. Mohamed
Department of Electrical, Electronic and Systems Engineering,
Faculty of Engineering and Built Environment,Universiti Kebangsaan
Malaysia (UKM), 43600 Bangi, Selangor, Malaysia
Correspondence should be addressed to A. M. Yusop;
[email protected]
Received 8 February 2014; Accepted 27 May 2014; Published 24
June 2014
Academic Editor: Mingcong Deng
Copyright © 2014 A. M. Yusop et al. This is an open access
article distributed under the Creative Commons Attribution
License,which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly
cited.
This study presents the behavioral model of thermal temperature
and power generation of a thermoelectric-solar hybrid energysystem
exposed to dynamic transient sources. In the development of
thermoelectric-solar hybrid energy system, studies havefocused on
the regulation of both systems separately. In practice, a separate
control system affects hardware pricing. In this study,an inverse
dynamic analysis shaping technique based on exponential function is
applied to a solar array (SA) to stabilize outputvoltage before
this technique is combined with a thermoelectric module
(TEM).Thismethod can be used to estimate themaximumpower point of
the hybrid system by initially shaping the input voltage of SA.The
behavior of the overall system can be estimated bycontrolling the
behavior of SA, such that SA can follow the output voltage of TEM
as the time constant of TEM is greater than thatof SA. Moreover, by
employing a continuous and differentiable function, the acquired
output behavior of the hybrid system can beattained. Data showing
the model is obtained from current experiments with predicted
values of temperature, internal resistance,and current attributes
of TEM.The simulation results show that the proposed input shaper
can be used to trigger the output voltageof SA to follow the TEM
behavior under transient conditions.
1. Introduction
Issues involving the continuous increase in oil price and
envi-ronmental awareness have attracted extensive research
inter-ests for renewable energy power generation. Solar
energy,hydro energy, nuclear energy, andwind energy are
commonlyused to produce electricity, thereby reducing carbon
dioxidegas emissions [1]. Solar energy is one of the most
frequentlyused types of renewable energy; however, solar energy
shouldbe stored for future use because sunlight is the only
sourceof this type of energy; as such, the availability of this
type ofenergy varies with time.
The conversion of solar energy into electricity can be
con-ducted by applying photovoltaic technology.This technologyhas
received remarkable progress since 1839 [2]. However,solar array
(SA) fails to function at certain times of theday; for this reason,
researchers have been prompted toimprove SA efficiency. Although
efficiency can be further
enhanced, the improvement of SA performance has beenimpeded
because of heat dissipation and development costs[2, 3]. TEM is a
preferable device to overcome the currentproblems on photovoltaics,
in which this solid state deviceis able to transform waste thermal
energy into electricitywhen thermal gradient is present between two
junctions [4].This device can be considered as one of the most
efficientcandidates used for energy conversion because this
energyproduces no waste matter during conversion. However,
TEMcannot operate individually as a beneficial energy converter.In
several studies, SAs and TEMs have been combined todevelop a hybrid
energy system that utilizes the benefits ofboth technologies [1,
5–7].
SA and TEM are nonlinear devices with output char-acteristics
depending permanently on external substantialeffects, such as
maximum power point that should be trackedefficiently [5]. In a
previous study [1], a hybrid energy systemcomprised a dual Ćuk
converter to lodge power for multiple
Hindawi Publishing CorporationModelling and Simulation in
EngineeringVolume 2014, Article ID 376781, 13
pageshttp://dx.doi.org/10.1155/2014/376781
-
2 Modelling and Simulation in Engineering
inputs; this hybrid is suitable for a grid connected
system.Theproposed method in another study [5] considers an
optimalcircuit design to control solar energy power, in which SA
andTEM are arranged in a master/slave mode. Using an
optimalcircuit, a controller is developed to predict the
maximumpower point and can control both systems simultaneously.An
extension hybrid TEM-SA system with liquid cooling isassembled to
increase the efficiency of current hybrid systems[6, 7].
This study aims to conduct a dynamic analysis of ahybrid TEM-SA
configuration by using MATLAB with extraidentification to increase
the efficiency of the existing hybridTEM-SA and to reduce the
energy consumption of thesystem. Previous studies have also focused
on an MPPT-designed circuit in hybrid energy systems. As such,
thisMPPT circuit should be designed separately for both
systemsbecause various maximum power points are obtained
fordifferent systems. Although an optimal controller circuit
isdesigned to control SA behavior [5], this circuit uses
passiveelement devices, together with a digital signal
processor.One of the drawbacks of this technique is the
increasedpower consumption of the power circuit because of
digitalcomputation. For this reason, a feedforward controller
withregard to input shaping scheme is introduced in this
study.Input shaping is commonly used controller technique tocontrol
the vibration of moving or flexible systems [8, 9].This technique
is also used to control the settling timeof a positioning system
from one value to another [10].Studies have also focused on this
field since the 1980s.In input shaping, several approaches,
including “posicast”control [11, 12], impulse shaping [13], command
shaping [14],zero vibration derivative technique (ZVD) [15], and
extrainsensitive technique [16], are used. In a previous study
[17],a three-step (TS) input shaping technique was applied, inwhich
three-impulse shaping is provided with positive andnegative
shapers. In this technique, this new shaper extendsthe current zero
vibration derivative (ZVD) technique toa generalized TS shaper
method; this improved techniquecan function appropriately in any
dynamic model. In thesemethods, input function should be computed
and outputbehavior mainly depends on the given input. An
inversedynamic analysis type of input shaper has been proposed
byPiazzi and Visioli [18] via employing polynomial function asthe
acquired output function. Although the ideas of Piazziand Visioli
are interesting and useful, they need to switchthe polynomial
function into another function because ofthe erratic behaviour of
this function after attaining the endpoint. This argument is
accepted by all critics. For instance,Iravani and Sahinkaya in [19]
hold that the switching willbring in the discontinuity in both the
first and secondderivatives of the function which leads to the
unstable outputbehaviour of the applied system. Particularly, Zhao
et al. intheir continuousworks in [20–22] concentrate on the
stabilityproblem in arbitrary switching. The addressed problem
issolved by introducing multiple copositive types
Lyapunov-Krasovskii functional. Additionally, the multiple
copositivetypes Lyapunov-Krasovskii functional is reduced to
thecommon copositive type Lyapunov-Krasovskii functional. Inhere,
they consider applying the suggested method to the
feedback controller. Anothermethod regarding the switchingsignal
is the dwell timemethodwhich has received increasingattention since
this method is able to stabilize the systemwhen the dwell time is
adequately high; see [23–25].
Moreover, the idea from Piazzi and Visioli has beenextended in
previous studies [8, 9, 19, 26] using exponentialfunction which has
been proven to overcome the limitationof the polynomial function.
On the whole, this inversionscheme is based on the feedforward
control technique whichdoes not need feedback measurements. As a
matter of fact,in SA design, the occurrence of feedback measurement
toobtain the maximum power tends to increase the energyconsumption
of the overall system.
In this study, an inverse dynamic analysis type of aninput
shaper based on exponential function was added tothe SA model to
control the input behavior of a photovoltaicarray. The controller
part in SA is designed so that the SAis able to collect solar
energy throughout the day. Moreimportantly, the voltage and
intensity formed by the SAcan be controlled consecutively to
function at the highestoperating point. With this method, the
energy consumptionof the system is further minimized. Significant
efforts havebeen devoted to the development of this input shaper,
inwhich the input shaper is designed according to the
acquiredoutput behavior of the hybrid energy system. In addition,
theinverse dynamic type input shaper can be established by
usingbuilt-in control blocks, which can be further combined
usingSimPowerSystem tools for the MPPT circuit development.
2. Modeling of the ThermoelectricModule and Solar Array
Themodels of TEM and SA modules are designed separatelyby
inserting the corresponding numbers of modules in seriesor parallel
before both systems are combined. As the timeconstant of TEM is
evidently greater than that of SA, TEMis designed to function as
the master and SA is designed asthe slave.
2.1. Modeling of the Thermoelectric Module. In this model,TEM
functions under a dynamic condition, in which thetemperature of the
cold side is maintained for natural coolingto produce a dynamic
response because many studies havefocused on the analysis of a
steady state behavior, whichonly involves constant temperature [4].
In practice, thetemperature of TEM input fluctuates with time.
To obtain the heat model of TEM, we considered severaleffects,
including thermal conduction, Joule, Peltier, Seebeck,and Thomson.
However, Thomson effect is ignored becausesuch effect is very
small.
To ensure that heat is distributed equally at both junc-tions,
we should ensure that TEM exhibits high thermalconductivity.
Thermal conductivity is expressed according toFourier process with
heat transfer, 𝑄tc, as follows:
𝑄tc = −Δ𝑇𝜅tc, (1)
where 𝜅tc is the thermal conductivity and Δ𝑇 is the
differencebetween sides of high and low temperatures. Joule effect
is
-
Modelling and Simulation in Engineering 3
produced internally when electrical current, 𝐼, flows acrossa
thermoelectric leg. This effect is observed in both sides
atdifferent temperatures but with the same amount of energyas
follows:
𝑄joule = 𝐼2𝑅, (2)
where 𝑅 is the electrical resistance. Peltier effect is
observedwhen electrical current flows through two different
junctionsand the total heat transfer is expressed as follows:
𝑄peltier = 𝛼Δ𝑇𝐼, (3)
where 𝛼 is the Seebeck coefficient of the TEG. Seebeck
effectshows that the temperature difference between two
differentelectrical conductors or semiconductors produces a
voltagedifference between two junctions. Seebeck coefficient is
alsodefined as follows:
𝛼 =𝑉
Δ𝑇. (4)
In the design of a TEM at specific thermal flow and
tem-perature, the maximum power point should be obtained. Ifload
resistance is equal to the internal resistance of TEM,output power
is equal to the peak value. Equation (5) showsthe energy balance
equations used for steady state analysis athot and cold junctions
of TEM as follows:
𝑄ℎ= 𝛼𝑇ℎ𝐼 − 𝜅tcΔ𝑇 − 0.5𝐼
2𝑅,
𝑄𝑐= 𝛼𝑇𝑐𝐼 − 𝜅tcΔ𝑇 + 0.5𝐼
2𝑅.
(5)
To develop a good TEM, a high Seebeck coefficient, togetherwith
low electrical resistance and low thermal conductivity,should be
provided [27]. In the figure of merit, 𝑍 relates thisstatement and
is expressed as follows:
𝑍 =𝛼2
𝑅𝜅 tc. (6)
In terms of the electrical properties of TEM, the
followingparameters are frequently used to specify TEM
characteris-tics: 𝑇
ℎ, temperature in the hot side; 𝑇
𝑐, temperature in the
cold side; 𝑊𝑚, the power at the load resistance, 𝑅
𝐿, internal
resistance,𝑅, where (𝑅𝐿= 𝑅); and𝑉
𝑚, load voltage. Electrical
resistance and Seebeck coefficient are expressed as follows:
𝑅 = 𝑅𝐿=𝑉2
𝑚
𝑊𝑚
,
𝛼 =2𝑉𝑚
Δ𝑇.
(7)
The following relationship shows that load resistance can
bevaried in proportion to internal resistance. Consider
𝑅𝐿= 𝑚𝑅, (8)
where 𝑚 is the ratio between load resistance and
internalresistance. In (4), 𝐼 is expressed as follows:
𝐼 =𝛼Δ𝑇
(1 + 𝑚)𝑅. (9)
Table 1: Specification of TEM (TEP1-12656-0.6).
Specifications ValuesHot side temperature (∘C) 300Cold side
temperature (∘C) 30Open circuit voltage (V) 8.4Matched load
resistance (Ω) 1.2Matched load output voltage (V) 4.2Matched load
output current (A) 3.4Matched load output power (W) 14.6Heat flow
across the module (W) ≈365Heat flow density (W cm−2) ≈11.6AC
resistance measured at 27∘C and 1000Hz (Ω) 0.5–0.7
Themaximum output power at matching load, 𝑅𝐿= 𝑅, is
obtained before any controller or MPPT circuit is designed.The
maximum current of TEM is the short-circuit current atzero load
voltage, 𝑉
𝐿= 0, which is expressed as follows:
𝐼short-ckt = 2𝐼𝑚 =2𝑊𝑚
𝑉𝑚
. (10)
According to Ohm’s Law and the resulting equations (9)and (10),
the TEM voltage can then be obtained as follows:
𝑉 = −𝑅 (𝐼 − 𝐼short-ckt) . (11)
The TEM model TEP1-12656-0.6 (Thermonamic) is usedin this model,
in which steady-state analysis is initiallyconducted to verify the
electrical parameters of the TEMmodel. The specifications of the
TEG module (TEP1-12656-0.6) are listed in Table 1 and the
parameters for steady statecondition verification are obtained by
applying equations (1)to (6). The value of the model parameter
under steady stateanalysis can be calculated as follows; 𝛼 =
0.031V/K, 𝑅 =1.2Ω, 𝜅tc = 20.85W/K, and 𝑍 = 3.869 × 10
−5𝐾−1.
The TEM model is implemented using MATLAB/SIM-ULINK as shown in
Figure 1. The inputs of the modelinclude the sides with cold and
hot temperatures of the TEMconfiguration.
2.2. Modeling of Solar Array. The characteristics of SAdepend on
the solar radiation and temperature of the SAsurface. As solar
radiation is increased, power produced bySA is increased; by
comparison, an increase in temperaturereduces output power. To
attain the highest output power, weshould reduce the temperature of
SA. The equivalent circuitof the solar cell is shown in Figure
2.
A group of solar cells is then combined in
series-parallelconfiguration to structure as an SA. In Figure 2,
cell pho-tocurrent, 𝐼PH, functions as current source,𝑅SH is the
internalshunt resistance of the cell, and 𝑅
𝑆is the series resistance
of the cell. In a previous study [28], SA can be
modeledmathematically using (12) to (15). The 𝐼-𝑉 characteristic
ofSA is represented as follows:
𝐼SA = 𝑁𝑃𝐼PH − 𝑁𝑃𝐼SAT [exp{𝑞 (𝑉SA + 𝐼SA𝑅𝑆)
𝑁𝑆𝐴𝑘𝑇
} − 1] , (12)
-
4 Modelling and Simulation in Engineering
2Voltage scope
1Current scope
Voltage scope
To workspace3
I
To workspace2
V
To workspace1P
To workspace
115 Current scope
Voltage scope
Subsystem
Scope3
Scope1
Repeatingsequence
interpolated
Product Power scope
Current scope
Th1Th
Tc
Tc
Figure 1: TEM block model as applied in MATLAB.
LoadIPH
ISAT
RSH
RS
ISA
Figure 2: Equivalent circuit of a solar cell.
Table 2: Factor of 𝐴 depends on PV technology [31].
Technology Value of 𝐴Si-mono 1.2Si-poly 1.3a-Si:H 1.8a-Si:H
tandem 3.3a-Si:H triple 5CdTe 1.5CIS 1.5AsGa 1.3
where 𝐼SA and 𝑉SA are the output current and the outputvoltage
of SA, respectively, 𝐼SAT is the saturation current thatvaries with
cell temperature,𝑁
𝑃and𝑁
𝑆are the total number
of cells in parallel and in series, respectively, 𝑞 is the
chargeof an electron (1.6 × 10−19 C), 𝑅
𝑆is the series resistance,
𝐴 is the ideality factor of a p-n junction, which dependson the
photovoltaic voltage (PV) technology (Table 2), 𝑘 isBoltzmann
constant (1.3805×10−23 J/K), and𝑇 is themoduleoperating
temperature.
𝐼PH is directly proportional to solar insolation and isdefined
as follows:
𝐼PH = [𝐼SC + 𝐾𝑖 (𝑇 − 298)] ×𝜆
1000, (13)
where 𝐼SC is the short circuit current, 𝐾𝑖 is the shortcircuit
current coefficient at 𝐼SC, and 𝜆 is the PV moduleillumination.
Table 3: Specification of solar module (SR10-36).
Specifications ValuesMaximum power (W) 10Maximum power voltage
(V) 17Maximum power current (A) 0.59Open circuit voltage (V)
21.6Short circuit current (A) 0.64
Themodule saturation current, which keeps changes withcell
temperature, is expressed as follows:
𝐼SAT = 𝐼RS(𝑇
𝑇ref)
3
exp [𝑞 × 𝐸𝑔
𝐴𝑘(1
𝑇ref−1
𝑇)] , (14)
where 𝐼RS is the reverse saturation current,𝑇ref is the
referencetemperature, and 𝐸
𝑔is the band gap for silicon (1.1 eV). 𝐼RS in
(14) is expressed as follows:
𝐼RS =𝐼SC
[exp (𝑞 × 𝑉OC/𝑁𝑠𝑘𝐴𝑇) − 1], (15)
where 𝑉OC is the open circuit voltage.Solar module SR10-36 from
Raloss is used as the SA
model in this design. The details of the electrical
character-istics of the module are listed in Table 3 and this
specificationis modeled using MATLAB/SIMULINK (Figure 3).
The 𝐼-𝑉 and 𝑃-𝑉 characteristics of SA depend on ter-minal
operating voltage, insolation, and surface temperature.These
characteristics are obtained by varying insolation atconstant
temperature or varying temperature at constantinsolation. The
polycrystalline silicon solar cells chosen inthis SA yield low
power consumption and entail less pro-duction costs, which likely
increase the total performance ofdevelopment [6].
3. Input Shaper for the Hybrid Energy System
The thermoelectric-solar hybrid energy system is imple-mented in
the SIMULINK/MATLAB (Figure 4). The input
-
Modelling and Simulation in Engineering 5
pv char
iv char
Voltage
Temperature
Temperature
Insol
Temp
Subsystem
Scope SA power
SA current
ProductIrradiation
Insolation
Vin Vout
Ipv
Figure 3: SA block model applied in MATLAB.
shaper used in inverse dynamic analysis is added at the inputof
SA to control the output characteristic of SA, such thatthe TEM
characteristic is observed. This system comprisessix pieces of TEM,
two pieces of SA, and an input shaper.TheTEM is connected in series
and thermally in parallel, whereasboth SAs are connected
electrically in parallel to increase theoutput power of an
individual system before these SAs arecombined to perform a hybrid
energy system.
SA exhibits a nonlinear characteristic because the
outputcharacteristics depend on external factors, such as
tempera-ture and sunlight irradiation. Considering these factors,
weshould accurately track the maximum power point of thisdevice. In
this study, the inverse dynamic analysis exponentialtype of input
shaper is used to simulate the input voltageof SA before it is
connected to the other parts of the SAsubsystem. This input shaper
also aims to reverse the controlmethod by initially indicating the
system output functionand then deriving the input form. In this
way, the formof output characteristics can be selected based on
systemlimitations. In the present study, the output function
shouldbe usedwith only one parameter to control the
characteristicsfrom the final point onwards; as a result, a simple
inputfunction is obtained.The particular constraint of output
formdetermines output power along with controlling the
systemlimitations. Figure 5 shows the 𝐼-𝑉 and𝑃-𝑉 characteristics
ofa solar cell. In particular, power curve contains a maximumpower
point (MPP). In this study, the MPP voltage, 𝑉MPP,is less than the
open circuit voltage, 𝑉OC, and 𝐼MPP is lowerthan 𝐼SC. AtMPP,
current and voltage exhibit almost the samerelation to irradiance
and temperature changes.
The power behavior of SA is constant from an initialtime point
to a specific end point until power decreasesdrastically to a
negative value. For the selected SA model,power decreases to a
large negative value, which likely resultsin an overall power curve
to follow SA behavior. As aresult, TEM automatically follows the SA
behavior, whichis impractical to obtain the maximum power of the
overallsystem, when an SA diagram and a TEM block diagram
arecombined to form a hybrid system.
3.1. Inverse Dynamic. The inverse dynamic is only applied tothe
voltage equation of the SA since the current behaviourautomatically
changed when the voltage function is changed.
As mentioned earlier, the SA power needs to be set to followthe
TEM behaviour. Before designing any input shaper, theform of the
target output waveform needs to be confirmedfirst. In the
simulation, the SA input voltage is set to be asawtooth signal and
based on Weisstein [30] this signal isrepresented as follows:
𝑉SA (𝑥) = 𝐴 frac(𝑥
𝑇+ 𝜙) , (16)
where frac(𝑥) is the fractional part frac(𝑥) ≡ 𝑥− ⌊𝑥⌋,𝐴 is
theamplitude, 𝑇 is the period of the wave, and 𝜙 is its phase.
Theoutput voltage of the SA is equivalent to the input voltage.From
(16), it shows that the SA voltage form is a first ordersystem.
The system transfer function by only concentrating onvoltage
form is expressed as follows:
𝑉SA (𝑢) × 𝐹 (𝑢) = 𝑋 (𝑢) , (17)
where 𝐹(𝑢) is the normalized input of the SA and𝑋(𝑢) is
thenormalized desired output function. The normalized inputis
obtained using inverse dynamic by substituting the SAsawtooth
function and the desired output form in (17).
3.2. Desired Output Behavior. The function representing
thepoint-to-point output characteristic should be differentiableand
continuous at least up to a second order derivative atwhich the
first derivative and the second derivatives at initialand final
simulation time points, 𝑋
𝐸, are zero and remain
zero. According to [18], asymptotic behavior is desired whenthe
final position is reached to remain in the same positionand the use
of exponential functions introduced by [8] isone of the most
efficient solutions. Here, the third orderexponential function of
the output function is evaluated tocontrol the system from time = 0
to 𝑋
𝐸as the target output
waveform is similar to the first derivative of this
exponentialfunction (Table 4). This third order exponential
function isexpressed as follows:
𝑥 (𝑡) = 𝑋𝐸[1 − 𝑒
−(𝛼𝑡)3
] . (18)
To generalize the analysis, we can define the normalized time𝑢
as follows:
𝑢 = 𝛼𝑡. (19)
From (18) and (19), the normalized equation of the desiredoutput
function is derived as follows:
𝑋(𝑢) =𝑥 (𝑡)
𝑋𝐸
= 1 − 𝑒−𝑢3
. (20)
The derivatives are shown in the following equations:
�̇� (𝑢) =1
𝛼𝑋𝐸
�̇� (𝑡) = −𝑒−𝑢3 𝑑
𝑑𝑢(−𝑢3) = 3𝑢
2𝑒−𝑢3
,
�̈� (𝑢) =1
𝛼2𝑋𝐸
�̈� (𝑡) = 3 [𝑢2 𝑑
𝑑𝑢(𝑒−𝑢3
) + 𝑒−𝑢3 𝑑
𝑑𝑢(𝑢2)]
= (6𝑢 − 9𝑢4) 𝑒−𝑢3
.
(21)
-
6 Modelling and Simulation in Engineering
Table4:Ch
aracteris
ticso
fthe
prop
osed
output
functio
n.
Type
ofou
tput
functio
nEq
uatio
nof
theo
utpu
tfun
ction
Outpu
tfun
ctionbehavior
Actualou
tput
functio
n𝑋(𝑢)=𝑥(𝑡)
𝑋𝐸
=1−𝑒−𝑢3
00.05
0.1
0.15
0.2
0.25
0.3
Nor
mal
ized
tim
e, u=𝛼t
1
0.8
0.6
0.4
0.2 0
Actual output function
Firstd
erivativeo
factualoutpu
tfun
ction
𝑋(𝑢)=
1
𝛼𝑋𝐸
𝑥(𝑡)=−𝑒−𝑢3𝑑 𝑑𝑢( −𝑢3)=3𝑢2𝑒−𝑢3
1.4
1.2 1
0.8
0.6
0.4
0.2 00
0.05
0.1
0.15
0.2
0.25
0.3
Nor
mal
ized
tim
e, u=𝛼t
First derivative of actual output function
-
Modelling and Simulation in Engineering 7
Table4:Con
tinued.
Type
ofou
tput
functio
nEq
uatio
nof
theo
utpu
tfun
ction
Outpu
tfun
ctionbehavior
Second
deriv
ativeo
factualoutpu
tfunctio
n𝑋(𝑢)=
1
𝛼2𝑋𝐸
𝑥(𝑡)=3[𝑢2𝑑 𝑑𝑢(𝑒−𝑢3
)+𝑒−𝑢3𝑑 𝑑𝑢( 𝑢2)]=(6𝑢−9𝑢4)𝑒−𝑢3
00.05
0.1
0.15
0.2
0.25
0.3
Nor
mal
ized
tim
e, u=𝛼t
Second derivative of actual output function
2.5 2
1.5 1
0.5 0
−0.5
−1
−1.5
−2
−2.5
-
8 Modelling and Simulation in Engineering
2Out2
1Out1
i-v char
To workspace3
To workspace2
To workspace1
To workspace
-C-
TemperatureTemperature
Insol
Temp
Subsystem6
Current scope
Voltage scope
Subsystem
Scope5
Scope4
Scope3
Scope
SA power2
SA power1
SA power
SA current
Repeatingsequence2
Repeatingsequence Product1
Product
IrradiationInsolation
Add2
Vin Vout
IpvIpv
Vpv
Ppv
Tc
Tc
ThTh1
f(u)fcn1
Figure 4: Thermoelectric-solar hybrid energy system block model
applied in MATLAB.
ISC
IMPP
Cell
curr
ent (
A)
PMPP
Cel
l pow
er (W
)
Cell voltage (V)VOCVMPP
MPP
00
Figure 5: 𝐼-𝑉 and 𝑃-𝑉 characteristics of a solar cell [29].
Stop
Start
Does the power behavior of the hybrid system follow TEM?
Recalculate theinput function
NO
Determine input function by inverse dynamic analysis
Integrate inputfunction in the
hybrid energy system
YES
Generate the desired motion
Obtain outputresponse
Figure 6: Design process of the inverse dynamic analysis.
0 100 200 300 400 500 600 7002030405060708090
Time (s)
Col
d sid
e tem
pera
ture
(∘C)
Figure 7: Temperature variation in the cold side of TEM.
Table 4 shows the characteristics of the proposed outputfunction
defined by the actual output function as well as thefirst and
second derivatives of the actual output functions. Asthe desired
output voltage function of the SA is the same asthe first
derivative of the third order exponential function,𝑋(𝑢) is set to
be
𝑋(𝑢) = �̇� (𝑢) = 3𝑢2𝑒−𝑢3
. (22)
3.3. Exponential Input Shaping Design. The input
functioncorresponds to the input voltage, which initially
increasesproportionally with time to the exponential behavior.
Assuch, the input function is calculated to be
𝐹 (𝑢) =(3𝑢2) 𝑒−𝑢3
𝑉SA (𝑢),
𝐹 (𝑢) =(3𝑢2) 𝑒−𝑢3
𝐴 frac (𝑢/𝑇 + 𝜙),
(23)
where 𝐴 = 30V, 𝑇 = 10 s, and 𝜙 = 0∘.
-
Modelling and Simulation in Engineering 9
0 5 10 15 20 25 30 35 40 45 500
102030405060708090
TEM voltage
TEM
pow
er
(a)
0
1
2
3
4
5
6
7
TEM
curr
ent
0 5 10 15 20 25 30 35 40 45 50TEM voltage
(b)
Figure 8: TEM characteristics at a temperature variation from
25∘C to 85∘C: (a) 𝑃-𝑉 characteristic and (b) 𝐼-𝑉
characteristic.
0 5 10 15 20 2505
101520
Voltage (V)
Pow
er (W
)
1000W/m2
800W/m2500W/m2
300W/m2
(a)
00.20.40.60.8
11.2
Curr
ent (
A)
0 5 10 15 20 25Voltage (V)
1000W/m2
800W/m2500W/m2
300W/m2
(b)
Figure 9: SA characteristics at different insolation: (a) 𝑃-𝑉
characteristic and (b) 𝐼-𝑉 characteristic.
The new output power is determined to be the samebehavior as the
input voltage. As a result, the total hybridpower tracks the TEM
behavior because the SA powerbehavior is changed by the new input
signal. Figure 6 showsthe design process of inverse dynamic
analysis.
4. Simulation Results
Two simulation models are designed using MATLAB: onemodel is the
hybrid systemwith an input shaper and the othermodel does not have
an input shaper. From the standpoint ofthe TEM application, the
maximum output power is desired,in which load resistance is set at
the same value as internalresistance. The behavior of the
individual system is plottedto configure mathematical modeling and
the characteristicof output performance. For TEM, the low
temperature datafrom a previous study [4] is used in the dynamic
analysis ofthe TEM block at a constant high temperature of 115∘C.
Thevariation in the low temperature is shown in Figure 7. Thelow
temperature is gradually increased from 25∘C to 75∘C andmaintained
at that value until the end of simulation time.
The characteristic of TEM, in which six thermoelectricgenerators
are connected in series, is shown in Figure 8. AsTEGs are cascaded,
single TEG voltages are combined andexpressed as follows:
𝑉𝑖= 𝑖 × 𝑉, (24)
where 𝑖 is the number of cascaded thermoelectric
generators.Considering that power is directly proportional to
voltage, wecan express total power as themaximumpower of single
TEGmultiplied by the factor of 𝑖. In Figure 8, the total power
is87.6W at the matched load current of 3.4 A and the matchedload
voltage of 25.2 V.
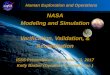
For the SA block, the surface temperature is maintainedat 40∘C
and simulation is conducted by varying insolation at300, 500, 800,
and 1000W/m2. The 𝑃-𝑉 and 𝐼-𝑉 characteris-tics of SA are shown in
Figure 9.
We compared the characteristics to verify the design byadding
the input shaper to the input of SA and to the otherone without the
input shaper. After the input shaper wasadded, the input voltage of
SA changed to the first derivativeof exponential behavior (Figure
10).
For the next analysis, the SA voltage curve is changedto
different curvature to see the effect after adding thesame input
shaper as the previous analysis. It is notable bycomparing Figures
10 and 11 that the characteristic of the SAvoltage with input
shaper is the same regardless of the givencurve of the initial SA
voltage.The curve shows its peak valueis 1.18 V at time 0.88 s for
both cases. This is the beauty ofthis exponential input shaper in
view of the fact that it is ableto maintain and stabilize any form
of curve according to itsexponential characteristic.
The performance of the hybrid energy system with theinput shaper
is observed by varying the input of TEM asthe SA branch is fixed at
1000W/m2. The temperature of the
-
10 Modelling and Simulation in Engineering
0 5 10 15 20 25 300
5
10
15
20
25
30
Time (s)
SA v
olta
ge w
ithou
t in
put s
hape
r (V
)
(a)
00.20.40.60.8
11.21.4
0 5 10 15 20 25 30Time (s)
SA v
olta
ge w
ithin
put s
hape
r (V
)
(b)
Figure 10: Case 1: SA voltage (a) without and (b) with input
shaper.
0
5
10
15
20
25
SA v
olta
ge w
ithou
t in
put s
hape
r (V
)
0 5 10 15 20 25 30
Time (s)
(a)
00.20.40.60.8
11.21.4
0 5 10 15 20 25 30
Time (s)
SA v
olta
ge w
ithin
put s
hape
r (V
)
(b)
Figure 11: Case 2: SA voltage (a) without and (b) with input
shaper.
20 30 40 50 60 70 80 900
102030405060708090
Hyb
rid p
ower
(W)
Cold side temperature (∘C)
Figure 12: Total hybrid power.
cold side of TEM is varied from 25∘C to 85∘C as observedin the
power curve in Figure 12. The result shows that theoverall output
power corresponds to the TEM behavior byonly controlling the SA
part.
To summarize this method, we present the comparisonresults of
the performance of the individual system and thehybrid systemwith
and without the input shaper in Figure 13.
Figure 13 shows that the inverse dynamic analysis cancontrol the
output behavior of SA to follow the TEMbehaviorunder a transient
operating condition. It is worth stressingthat the following
remarks can be concluded from Figures 7–13.
(1) This finding is one of the most important factorsthat should
be considered before any MPPT circuitis designed for this hybrid
system. This observationis considered because the time constant of
SA is less
than that of TEM. SA is also established to imitate theTEM
behavior. Hence, an appropriate behavior of theoutput power curve
is initially developed to falsify theacquired overall output
behavior of the hybrid system.
(2) The extra recognition of the inverse dynamic
analysisinvolves a user that selects the optimum overallsystem
behavior; this behavior is chosen to inducethe designed input
function to respond to the selectedoutput function. This procedure
can be conducted toreduce hardware pricing by not designing the
separatecontroller for both systems before a hybrid system
isformed. For this reason, this hybrid system can beused to
estimate the MMP of the overall system byusing a single controller
to regulate both systems.
(3) In contrast to the method presented in a previousstudy [5],
the proposedmethod can reduce the powerconsumption of this hybrid
system without usingany digital controller and achieve the desired
outputpower curve.
(4) This system also reduces the bare bones of designingthe MPPT
for different systems before such bones arecombined to form a
hybrid system.
(5) By comparing with the existing works, it can beseen from
Figure 10(b) that the SA voltage with theproposed input shaper
follows the same character-istics of the similar input shaper
applied to flexiblesystem in [8]. This proposed method is able
tostabilize the hybrid system to certain condition which
-
Modelling and Simulation in Engineering 11
0 5 10 15 20 25 30Time (s)
0
10
20
30
40
50
60
70
80
90TE
M p
ower
(W)
Without input shaper
(a)
0
10
20
30
40
50
60
70
80
90
TEM
pow
er (W
)
0 5 10 15 20 25 30Time (s)
With input shaper
(b)
SA p
ower
(W)
0 5 10 15 20 25 30Time (s)
1
0
−1
−2
−3
−4
−5
−6
×104
(c)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 5 10 15 20 25 30Time (s)
SA p
ower
(W)
(d)
0 5 10 15 20 25 30Time (s)
1
0
−1
−2
−3
−4
−5
−6
×104
Hyb
rid p
ower
(W)
(e)
Hyb
rid p
ower
(W)
0
10
20
30
40
50
60
70
80
90
0 5 10 15 20 25 30
Time (s)
(f)
Figure 13: Power curve comparison.
is to follow the characteristic of the TEM. From
thisobservation, the exponential function input shaper iscapable of
obtaining the same characteristic in theapplication of energy
systems although the system
is different since previously it was solitude to theapplication
of flexible systems.
(6) Again, from Figure 10(b), the peak value of the SAvoltage is
close to 1.18 V at the normalized time of
-
12 Modelling and Simulation in Engineering
0.88 s. The same characteristic is drawn from [8]where the
different systems are looking on.
The effectiveness of the exponential function input shaperwhen
applied to the hybrid energy system of TEM-SA isconvincible to work
very well since the output power curveneeds to be stabilized to
certain value before MPPT circuit isdesigned. The stability factor
is one of the main parametersthat will be stressed out after the
MPPT is designed for thishybrid energy system.
5. Conclusion
A formulation of the TEM-SA behavior, which includesthermal
behavior and electrical properties, has been devel-oped using
MATLAB/SIMULINK. This model is used todetermine the output power
characteristics of TEM, SA,and hybrid energy system for transient
analysis. Simulationresults show that an inverse dynamic analysis
based onexponential function can be applied to control the
outputbehavior of the SA. The satisfactory curve of the
hybridoutput power is achieved using this method. In addition,this
method simplifies the control of the overall system,in which the
controller is only designed to control the SAoutput behavior, such
that SA behavior follows the TEMcharacteristic. The controlled
input behavior is applied tofurther minimize the energy consumption
of the system.Significant efforts have been devoted to the
development ofthis input shaper. In this system, the input shaper
is designedaccording to the acquired output behavior of the
hybridenergy system. In addition, the inverse dynamic type
inputshaper can be built by using built-in control blocks, whichcan
be combined further using SimPowerSystem tools todevelop the MPPT
circuit. The MPPT circuit can then beapplied in the hybrid system
to obtain the MPP and generateelectricity for electronic device
applications. Considering thatthe overall output behavior follows
the TEM behavior, werecommend that only one MPPT circuit should be
designedfor this hybrid system.
Conflict of Interests
The authors declare that there is no conflict of
interestsregarding the publication of this paper.
Acknowledgments
Theauthors would like to thank theDepartment of
Electrical,Electronic and Systems Engineering, Faculty of
Engineeringand Built Environment, Universiti Kebangsaan
Malaysia(UKM), the Universiti Teknikal Malaysia Melaka (UTeM),and
theMinistry of Higher Education for moral, operational,and
financial support for this project.
References
[1] N. Smith and R. McCann, “Investigation of a multipleinput
converter for grid connected thermoelectric-photovoltaic
hybrid system,” in Proceedings of the IEEE Green
TechnologiesConference, April 2012.
[2] A. R. Jha, Solar Cell Technology and Applications, CRC
Press,2009.
[3] S. Odeh and M. Behnia, “Improving photovoltaic
moduleefficiency using water cooling,” Heat Transfer Engineering,
vol.30, no. 6, pp. 499–505, 2009.
[4] N. Q. Nguyen and K. V. Pochiraju, “Behavior of
thermoelectricgenerators exposed to transient heat sources,”
Applied ThermalEngineering, vol. 51, no. 1-2, pp. 1–9, 2013.
[5] X. Zhang and K. T. Chau, “Design and implementation of a
newthermoelectric-photovoltaic hybrid energy system for
hybridelectric vehicles,” Electric Power Components and Systems,
vol.39, no. 6, pp. 511–525, 2011.
[6] M. M. M. Daud, N. B. M. Nor, and T. Ibrahim, “Novelhybrid
photovoltaic and thermoelectric panel,” in Proceedingsof the IEEE
International Power Engineering and OptimizationConference (PEOCO
'12), pp. 269–274, Melaka, Malaysia, June2012.
[7] D. Yang and H. Yin, “Energy conversion efficiency of a
novelhybrid solar system for photovoltaic, thermoelectric, and
heatutilization,” IEEETransactions onEnergyConversion, vol. 26,
no.2, pp. 662–670, 2011.
[8] M. N. Sahinkaya, “Input shaping for vibration-free
positioningof flexible systems,” Proceedings of the Institution of
MechanicalEngineers: Journal of Systems and Control Engineering,
vol. 215,no. 5, pp. 467–481, 2001.
[9] M. N. Sahinkaya, “Inverse dynamic analysis of
multiphysicssystems,” Proceedings of the Institution of Mechanical
Engineers:Journal of Systems and Control Engineering, vol. 218, no.
1, pp.13–26, 2004.
[10] S. Devasia, “Time-optimal control with pre/post
actuationfor dual-stage systems,” IEEE Transactions on Control
SystemsTechnology, vol. 20, no. 2, pp. 323–334, 2012.
[11] P. Häuptle, P. Hubinský, and G. Gruhler, “Harmonic
modu-lated feedback in control to lower oscillations in
mechatronicsystems,” in Proceedings of the 11th International
Conferenceon Control, Automation and Systems (ICCAS '11), pp.
273–276,IEEE, October 2011.
[12] M. Rahimi and M. B. Ghaznavi-Ghoushchi, “Improvement
oftiming specifications in second order electronic systems
usingprogrammable CMOS Posicast pulse shapers,” in Proceedings
ofthe 20th Iranian Conference on Electrical Engineering (ICEE
'12),pp. 309–313, May 2012.
[13] S. Garrido, M. Abderrahim, A. Giménez, R. Diez, and
C.Balaguer, “Anti-swinging input shaping control of an
automaticconstruction crane,” IEEE Transactions on Automation
Scienceand Engineering, vol. 5, no. 3, pp. 549–557, 2008.
[14] J. R. Huey andW. Singhose, “Design of
proportional-derivativefeedback and input shaping for control of
inertia plants,” IETControl Theory & Applications, vol. 6, no.
3, pp. 357–364, 2012.
[15] C. La-orpacharapan and L. Y. Pao, “Fast and robust control
ofsystemswithmultiple flexiblemodes,” IEEE/ASMETransactionson
Mechatronics, vol. 10, no. 5, pp. 521–534, 2005.
[16] W. E. Singhose, L. J. Porter, T. D. Tuttle, and N. C.
Singer,“Vibration reduction using multi-hump input shapers,”
Journalof Dynamic Systems, Measurement and Control, Transactions
ofthe ASME, vol. 119, no. 2, pp. 320–326, 1997.
-
Modelling and Simulation in Engineering 13
[17] S. S. Gürleyük, Ö. Bahadir, Y. Türkkan, and H. Üsenti,
“Im-proved three-step input shaping control of crane system,”WSEAS
Transactions on Systems, vol. 7, no. 6, pp. 652–661, 2008.
[18] A. Piazzi and A. Visioli, “Minimum-time
system-inversion-based motion planning for residual vibration
reduction,”IEEE/ASME Transactions on Mechatronics, vol. 5, no. 1,
pp. 12–22, 2000.
[19] P. Iravani and M. N. Sahinkaya, “Variable-velocity
exponentialinput shaping for position controlled robotic systems,”
inProceedings of the 3rd Annual Dynamic Systems and
ControlConference (DSCC '10), pp. 345–351, University of Bath,
Septem-ber 2010.
[20] X. Zhao, L. Zhang, and P. Shi, “Stability of a class of
switchedpositive linear time-delay systems,” International Journal
ofRobust and Nonlinear Control, vol. 23, no. 5, pp. 578–589,
2013.
[21] X. Zhao, X. Liu, S. Yin, and H. Li, “Improved results
onstability of continuous-time switched positive linear
systems,”Automatica, vol. 50, no. 2, pp. 614–621, 2014.
[22] Z. Xudong, Z. Lixian, S. Peng, andH.R.Karimi, “Robust
controlof continuous-time systems with state-dependent
uncertaintiesand its application to electronic circuits,” IEEE
Transactions onIndustrial Electronics, vol. 61, no. 8, pp.
4161–4170, 2014.
[23] R. Guo, P. Zhao, and C. Zhang, “Input-to-state stability
for aclass of switched stochastic nonlinear systems by an
improvedaverage dwell time method,” Mathematical Problems in
Engi-neering, vol. 2014, Article ID 154679, 8 pages, 2014.
[24] M. S. Branicky, “Multiple Lyapunov functions and other
analysistools for switched and hybrid systems,” IEEE Transactions
onAutomatic Control, vol. 43, no. 4, pp. 475–482, 1998.
[25] W. Ni, D. Cheng, and X. Hu, “Minimum dwell time for
stabilityand stabilization of switched linear systems,” in
Proceedings ofthe 7th World Congress on Intelligent Control and
Automation(WCICA '08), pp. 4103–4108, IEEE, June 2008.
[26] Z. Rymansaib, P. Iravani, and M. N. Sahinkaya,
“Exponentialtrajectory generation for point to point motions,” in
Proceedingsof the IEEE/ASME International Conference on Advanced
Intel-ligent Mechatronics (AIM '13), 2013.
[27] H.-L. Tsai and J.-M. Lin, “Model building and simulationof
thermoelectric module using Matlab/Simulink,” Journal ofElectronic
Materials, vol. 39, no. 9, pp. 2105–2111, 2010.
[28] N. Pandiarajan, R. Ramaprabha, and R. Muthu, “Applicationof
circuit model for photovoltaic energy conversion
system,”International Journal of Photoenergy, vol. 2012, Article
ID410401, 14 pages, 2012.
[29] S.S. Mohammed, “Modeling and simulation of
photovoltaicmodule using MATLAB/Simulink,” International Journal
ofChemical and Environmental Engineering, vol. 2, no. 5, pp.
350–355, 2011.
[30] E. W. Weisstein, “Fourier Series—Sawtooth Wave,”MathWorld—A
Wolfram Web Resource, 1999,
http://mathwo-rld.wolfram.com/FourierSeriesSawtoothWave.html.
[31] H.-L. Tsai, C.-S. Tu, and Y.-J. Su, “Development of
generalizedphotovoltaic model using MATLAB/SIMULINK,” in
Proceed-ings of theWorld Congress on Engineering and Computer
Science,2008.
-
International Journal of
AerospaceEngineeringHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Modelling & Simulation in EngineeringHindawi Publishing
Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
DistributedSensor Networks
International Journal of