Embed Size (px)
Citation preview

Research ArticleDynamic Analysis of a High-Static-Low-Dynamic-StiffnessVibration Isolator with Time-Delayed Feedback Control
Yong Wang Shunming Li Chun Cheng and Xingxing Jiang
College of Energy and Power Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China
Correspondence should be addressed to Yong Wang wangy1921126com
Received 11 November 2014 Revised 1 March 2015 Accepted 5 March 2015
Academic Editor Lei Zuo
Copyright copy 2015 Yong Wang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes the time-delayed cubic velocity feedback control strategy to improve the isolation performance of High-Static-Low-Dynamic-Stiffness (HSLDS) vibration isolator Firstly the primary resonance of the controlled HSLDS vibration isolator isobtained by using multiple scales method The equivalent damping ratio and equivalent resonance frequency are defined to studythe effects of feedback gain and time delay on the primary resonance The jump phenomenon analysis of the controlled systemwithout and with time delay is investigated by using Sylvester resultant method and optimizationmethod respectivelyThe stabilityanalysis of the controlled system is also consideredThen the 13 subharmonic resonance of the controlled system is studied by usingmultiple scales method The effects of feedback gain and time delay on the 13 subharmonic resonance are also presented Finallyforce transmissibility is proposed to evaluate the performance of the controlled system and compared with an equivalent linearpassive vibration isolator The results show that the vibration amplitude of the controlled system around the resonance frequencyregion decreases and the isolation frequency band is larger compared to the equivalent one A better isolation performance in thehigh frequency band can be achieved compared to the passive HSLDS vibration isolator
1 Introduction
Recently passive nonlinear vibration isolators with High-Static-Low-Dynamic-Stiffness (HSLDS) characteristic [1 2]have drawn much attention by many researchers since theycan have a high-static stiffness with a small static displace-ment without sacrificing the load bearing capacity and asmall dynamic stiffness to achieve a low natural frequencywhich can perform better than the linear ones The HSLDSvibration isolator is comprised of a load bearing elasticelement providing positive stiffness and special mechanismsproviding negative stiffness called stiffness correctors Theload bearing elastic element is usually the vertical spring andthe stiffness correctors have various types Carrella Kovacicand Wang et al [3ndash6] used inclined springs as stiffnesscorrectors to build a HSLDS vibration isolator and studiedthe static and dynamic behaviors theoretically Le and Ahn[7] considered a HSLDS vibration isolator composed of twosymmetric negative stiffness structures and a positive stiffnessstructure for improving vibration isolation performance ofthe vehicle seat Robertson Zhou Xu and Shin et al [8ndash11]
built the HSLDS vibration isolators using electromagneticsprings or magnetic springs as stiffness correctors andanalyzed the static and dynamic characteristics theoreticallyand experimentally Liu et al [12 13] built a HSLDS vibrationisolator by using Euler buckled beams as stiffness correctorsand investigated the dynamic characteristics systematicallyShaw et al [14 15] used bistable composite plate as stiffnesscorrectors to build a HSLDS vibration isolator and analyzedthe steady state response detailedly After being loaded at thestatic equilibrium position the negative stiffness providedby the stiffness correctors is exactly balanced by the positivestiffness of the vertical spring then a small dynamic stiffnesscan be obtained to achieve a low natural frequency
The dynamic motion of the HSLDS vibration isolatorunder force or base excitation can be approximately describedby the Duffing equation with linear and cubic stiffness termsBecause of the inherent nonlinearity in the HSLDS vibrationisolator with the increase of the excitation force or base ampli-tude the resonance peak can become large and jumpphenom-enon can occur at the resonant frequencywhich are undesira-ble conditions in practical engineeringTherefore theHSLDS
Hindawi Publishing CorporationShock and VibrationVolume 2015 Article ID 712851 19 pageshttpdxdoiorg1011552015712851
2 Shock and Vibration
vibration isolator should be improved to obtain better isola-tion performance Increasing the linear damping can reducethe vibration amplitude around the resonance frequencyband avoid the jump phenomenon and obtain a largerisolation frequency band but results in a poor performancein the high frequency band where the isolation is requiredPassive vibration isolators often meet the dilemma betweenthese characteristics this can be eliminated by using activecontrol strategy The active control of the Duffing oscillatorhas been studied by many researchers [16ndash20] because ofthe unavoidable time delay in controllers and actuators theeffects of time delay are considered in the active control strat-egy The active control strategy is usually the time-delayedlinear velocity or time-delayed linear displacement controlstrategy Few studies have drawn attention to the active con-trol of the HSLDS vibration isolator Sun et al [21] used thetime-delayed linear displacement control strategy to obtainbetter isolation performance around the resonance frequencyband under both force and base excitation Although thesementioned strategies can be used to achieve better isolationperformance of the HSLDS vibration isolator around theresonance frequency band and obtain a larger isolationfrequency band under both force and base excitation thedilemma as the passive vibration isolator case can exist inthese active control strategies So in order to overcome thisdilemma this paper proposes the time-delayed cubic velocityfeedback control strategy Compared to the above-mentionedstrategies the time-delayed cubic velocity feedback controlstrategy can not only obtain better isolation performancearound the resonance frequency band and obtain a largerisolation frequency but also achieve a better performance inthe high frequency band where the isolation is required
The organization of this paper is as follows A HSLDSvibration isolator with time-delayed cubic velocity feedbackcontrol is presented and brief description of static analysisis shown in Section 2 In Section 3 the primary resonanceof the controlled HSLDS vibration isolator is obtained byusing the multiple scales method The jump phenomenonanalysis of the controlled system without and with time delayis investigated by using the Sylvester resultant method andoptimization method respectively The stability analysis ofthe controlled system is then studied The effects of thefeedback gain and time delay on the primary resonance jumpphenomenon and stability are also considered In Section 4the 13 subharmonic resonance is studied by using themultiple scales method The effects of the feedback gain andtime delay on the existence regions where 13 subharmonicresonance occurs are also presented In Section 5 the forcetransmissibility of the controlled HSLDS vibration isolatoris obtained and compared with an equivalent linear passivevibration isolator Conclusions are drawn in Section 6
2 Modeling of a HSLDS Vibration Isolator
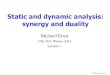
A HSLDS vibration isolator with time-delayed cubic velocityfeedback control is shown in Figure 1 The HSLDS vibrationisolator is comprised of vertical spring used as load bearingelement and two symmetric stiffness correctors providingnegative stiffness
Actuator
Controller
Initial position
SensorL
L0
Kh
120582 K C
m
mx
x(t)
fe
Figure 1 Scheme of a HSLDS vibration isolator with time-delayedcubic velocity feedback control
Figure 1 also shows when loading a mass 119898 the system isbalanced at the static equilibriumpositionThe stiffness of thevertical and horizontal springs is119870V and119870ℎ the initial lengthof the horizontal springs is 1198710 the compression deformationof the horizontal springs when the system is at the staticequilibrium position is 120582 the length of the connectingelement is 119871 119909 is the displacement of the mass from the staticequilibrium position the damping coefficient of the dampingis 119862 and the excitation is force excitation with a harmonicforce 119891119890 = 119865119890 cos(119908119905) The velocity of the mass is measuredby the sensor the velocity signal can be exported to acertain cubic velocity feedback signal through the nonlinearcontroller and actuator Because of the unavoidable timedelay in the controller and actuator the effects of time delayshould be considered then the time-delayed cubic velocityfeedback control strategy can be implemented
The force-displacement and stiffness-displacement rela-tionships of the system are given as
119865 = 119870V119909 minus 2119870ℎ [120582 minus (119871 minus radic1198712minus 1199092)]
119909
radic1198712minus 1199092 (1a)
119870 = (119870V minus 2119870ℎ) +
2119870ℎ (119871 minus 120582) 1198712
(1198712minus 1199092)32
(1b)
Equations (1a) and (1b) can be written in nondimensionalform as
119865 = (1 minus 2119896) 119909 + 2119896 (1 minus120582)
119909
radic1 minus 1199092 (2a)
= (1 minus 2119896) +
2119896 (1 minus120582)
(1 minus 1199092)32
(2b)
where 119909 = 119909119871 120582 = 120582119871 119896 = 119870ℎ119870V 119865 = 119865(119870V119871) and = 119870119870V
Shock and Vibration 3
0 01 02 03 04 05
0005
01015
02
minus05 minus04 minus03 minus02 minus01minus02
minus015
minus01
minus005
F
x
= 04
= 045
= 05
= 055
0
02
04
06
08
1
12
0 01 02 03 04 05minus05 minus04 minus03 minus02 minus01minus02
x
K
= 04
= 045
= 05
= 055
Figure 2 Nondimensional force-displacement and stiffness-displacement curves
The nondimensional stiffness at the static equilibriumposition can be obtained by substituting 119909 = 0 into (2b)
119904 = 1 minus 2119896120582 (3)
If the stiffness of the HSLDS vibration isolator is zero atthe static equilibriumposition the quasi-zero-stiffness (QZS)characteristic can be obtained then the value of 120582 is given as
120582qzs =
1
2119896
(4)
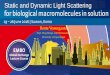
The nondimensional force-displacement and stiffness-displacement curves of the HSLDS vibration isolator forvarious values of 120582 when 119896 = 1 are shown in Figure 2 It canbe clearly seen that if 120582 =
120582qzs the negative stiffness provided
by the stiffness correctors is exactly balanced by the positivestiffness of the vertical spring in the vertical direction at thestatic equilibrium position then the QZS characteristic canbe achieved If 120582 gt
120582qzs the stiffness is negative in the neigh-
borhood of the static equilibrium position then the systemcan be unstable which is an undesirable condition in practicalengineering Because of some inevitable errors in practicalconditions the QZS characteristic can be hard to achieve andin order to ensure the system stability the stiffness of thesystem should keep a small positive value at the static equi-librium position so the system can have a common HSLDScharacteristic In this paper the case 120582 lt
120582qzs is considered
When the amplitude of the displacement is small thenondimensional force and stiffness can be expanded as a Tay-lor series at the static equilibriumposition119909 = 0 for simplicity
119865119886 (119909) = (1 minus 2119896120582) 119909 + 119896 (1 minus
120582) 1199093= 120572119909 + 120574119909
3 (5a)
119886 (119909) = 120572 + 31205741199092 (5b)
120572 = 1 minus 2119896120582 (5c)
120574 = 119896 (1 minus120582) (5d)
3 Primary Resonance
31 Steady State Resonance The dynamic equation of theHSLDS vibration isolator with time-delayed cubic velocityfeedback control under harmonic force excitation usingthird-order Taylor series expansion is given as
119898 + 119862 + 11986233(119905 minus 120575) + 119870V120572119909 + 120574119870V
1199093
1198712= 119865119890 cos119908119905 (6)
where 1198623 and 120575 are the feedback gain and time delayrespectively the dots denote derivatives with respect to time119905 Equation (6) can be written in nondimensional form as
11990910158401015840+ 21205771119909
1015840+ 21205773119909
10158403(119879 minus 120591) + 119909 + 120573119909
3= 1198911 cosΩ119879 (7)
where 119909 = 119909119871 1205771 = 119862(2119898119908119899) 1205773 = 11986231198712119908119899(2119898) 120573 = 120574120572
119908119899 =radic120572119870V119898 Ω = 119908119908119899 119879 = 119908119899119905 1198911 = 119865119890(120572119870V119871) and
120591 = 119908119899120575 The primes denote derivatives with respect to 119879To analyze the primary resonance of the controlled systemunder force excitation by using the multiple scales method itis assumed that
1205771 = 1205761205771
(8a)
1205773 = 1205761205773
(8b)
120573 = 120576120573 (8c)
1198911 = 120576119891 (8d)
Ω2= 1 + 120576120590 (8e)
where 120576 is a formal small parameter and 120590 is the detuningfrequency Then it is convenient to rewrite (7) as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591)
+ (Ω2minus 120576120590) 119909 + 120576
1205731199093= 120576119891 cosΩ119879
(9)
For simplicity assuming a two-scale expansion of (9) as
119909 (120591) = 1199090 (1198790 1198791) + 1205761199091 (1198790 1198791) + 119874 (1205762)
119879119899 = 120576119899119879 119899 = 0 1
(10)
4 Shock and Vibration
and using the following differential operators [22]
119889
119889119879
=
120597
1205971198790
+ 120576
120597
1205971198791
+ 119874 (1205762) = 1198630 + 1205761198631 + 119874 (120576
2)
1198892
1198891198792= 1198632
0+ 212057611986301198631 + 119874 (120576
2)
(11)
Substituting (10) and (11) into (9) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 + Ω
21199090 = 0 (12a)
1198632
01199091 + Ω
21199091 = minus2119863011986311199090 minus 2
120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0
+ 1205901199090 + 119891 cosΩ1198790
(12b)
The solution of (12a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895Ω1198790
+ 119888119888 (13a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(13b)
where 119888119888 denotes the conjugate term and the amplitude 119886 andphase Φ are functions of the slow time scale 1198791 Substituting(13a) into (12b) and removing secular terms from (12b)require
minus 1198952Ω1198631119860 minus 11989521205851Ω119860 minus 3
1205731198602119860
minus 11989561205773Ω31198602119860119890minus119895Ω120591
+ 120590119860 +
119891
2
= 0
(14)
Substituting (13b) into (14) and separating the real andimaginary terms the following equations can be obtained
1198861015840= minus
1
Ω
(Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 +
119891
2
sinΦ) (15a)
119886Φ1015840=
1
Ω
(minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 minus
119891
2
cosΦ)
(15b)
The steady state solutions of (9) for the primary resonancecorresponding to the fixed points are given as
Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 = minus
119891
2
sinΦ (16a)
minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 =
119891
2
cosΦ (16b)
Then the amplitude-frequency and phase-frequency rela-tionships using the original structural parameter can be givenby
(2Ω1205771119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863minus
3
2
1205773Ω31198863 sinΩ120591)
2
= 1198912
1
(17a)
tanΦ =
(Ω2minus 1) 119886 minus (34) 120573119886
3minus (32) 1205773Ω
31198863 sinΩ120591
2Ω1205771119886 + (32) 1205773Ω31198863 cosΩ120591
(17b)
From (17a) it can be seen that the primary resonanceof the controlled system is greatly influenced by the nondi-mensional feedback gain 1205773 and time delay 120591 when the otherstructural parameters and excitation force amplitude arechosen The effects of these two parameters on the primaryresonance can be seen by defining the equivalent dampingratio and equivalent resonance frequency as follows
120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 (18a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591 (18b)
Figure 3 shows the amplitude-frequency and phase-frequency relationships of the primary resonance for thecontrolled system under different feedback gain 1205773 withouttime delay When the time delay 120591 = 0 the feedback gain 1205773
only appears in the equivalent damping ratio term and (18a)and (18b) simplify into
120577eq = 1205771 +
3
4
1205773Ω21198862 (19a)
1199082
eq = 1 +
3
4
1205731198862 (19b)
The effect of the feedback gain 1205773 on the primary res-onance can be clearly seen in Figure 3 When the lineardamping ratio 1205771 is small and the system is uncontrolled thepeak amplitude of the primary resonance takes a larger valueand the jump phenomenon occurs When the feedback gain1205773 increases the equivalent damping ratio becomes largerthe peak amplitude of the primary resonance decreasesthe equivalent resonance frequency decreases and the jumpphenomenon can be avoided
When the time delay 120591 exists in the controlled systemthe following inequalities of the equivalent damping ratio andequivalent resonance frequency can be obtained
1205771 minus
3
4
1205773Ω21198862le 120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 le 1205771 +
3
4
1205773Ω21198862
(20a)
Shock and Vibration 5
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
Uncontrolled
a
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Uncontrolled
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
08 1 12 14 16 18 2 22minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
Φ
Figure 3 Amplitude-frequency and phase-frequency relationships of the primary resonance for the controlled system under differentfeedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005 119896 = 1 and
120582 = 04)
1 +
3
4
1205731198862minus
3
2
1205773Ω31198862le 1199082
eq
= 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591
le 1 +
3
4
1205731198862+
3
2
1205773Ω31198862
(20b)
Obviously compared to the controlled system withouttime delay when time delay 120591 exists it can decrease theequivalent damping ratio then the peak amplitude increasesthe equivalent resonance frequency can also increase whichleads to an undesirable isolation performance In the primaryresonance region assuming that Ω asymp 1 the equivalentdamping ratio and equivalent resonance frequency can beapproximated as
120577eq = 1205771 +
3
4
12057731198862 cos 120591 (21a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
12057731198862 sin 120591 (21b)
Then the equivalent damping ratio and equivalent res-onance frequency can be approximately considered as theperiodic functions in 2120587 periods Based on this assumptionthe effect of the time delay 120591 on the primary resonance canbe clearly seen in Figure 4 When the time delay 120591 lies inthe ranges of [0 1205872) and [31205872 2120587) the equivalent dampingratio is larger than the linear damping ratio then the peakamplitude and resonance frequency are smaller than theuncontrolled system which can achieve a better isolationperformance in the primary resonance region the equivalentdamping ratio takes a major effect on the peak amplitudeand resonance frequency in these two ranges When thetime delay 120591 lies in the range of [1205872 120587] the equivalentdamping ratio is smaller than the linear damping ratio and theequivalent resonance frequency is larger resulting in a poorerisolation performance in the primary resonance region thanthe uncontrolled system When the time delay 120591 lies in therange of (120587 31205872) although the equivalent damping ratiois smaller than the linear damping ratio the equivalent
resonance frequency is smaller and takes amajor effect on thepeak amplitude and resonance frequency the peak amplitudeand resonance frequency are smaller which can achieve abetter isolation performance in the primary resonance regioncompared to the uncontrolled system
Figure 4 also shows the numerical results obtained bysolving (7) using the fourth order Runge-Kutta method theanalytic method gives very well results compared with thenumerical results But when the time delay 120591 takes somespecial values a closed-loop response curve [23] emergesabove the primary resonance because multiple solutions existin these frequency bands some closed-loop response curvescan be estimated by numerical results and some cannot bewhich are due to their stability In Figures 4(c) 4(d) 4(e) and4(i) some parts of the upper branch of the primary resonancecannot also be estimated by numerical results which arealso due to their stability Stability analysis of the controlledsystem will be investigated in the stability analysis part
As can be clearly seen in Figures 3 and 4 the feedback gain1205773mostly influences the vibration amplitude of the controlledsystem around the resonance frequency band When thefeedback gain 1205773 changes the vibration amplitudes of thecontrolled system in the low and high frequency bands arealmost the same as the uncontrolled system Figure 5 showsthe effect of the time delay 120591 on the primary resonance for thecontrolled system with different feedback gain 1205773 around theresonance frequency band In this case only one single vibra-tion amplitude is considered the frequency Ω is chosen as 1and 11 respectively and the stability analysis of the vibrationamplitude is also investigated in the stability analysis part
The vibration amplitude is a periodic function of timedelay 120591 which can be seen in (17a) In the first half periodthe vibration amplitude decreases with the increase offeedback gain 1205773 while in the latter half period the vibrationamplitude first increases and then decreases with the increaseof feedback gain 1205773 Figure 6 shows the corresponding ampli-tude-frequency relationships of the primary resonance forthe controlled system with different feedback gain 1205773 When120591 = 1205874 lies in the range of the first half period with theincrease of feedback gain 1205773 the vibration amplitude around
6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
vibration isolator should be improved to obtain better isola-tion performance Increasing the linear damping can reducethe vibration amplitude around the resonance frequencyband avoid the jump phenomenon and obtain a largerisolation frequency band but results in a poor performancein the high frequency band where the isolation is requiredPassive vibration isolators often meet the dilemma betweenthese characteristics this can be eliminated by using activecontrol strategy The active control of the Duffing oscillatorhas been studied by many researchers [16ndash20] because ofthe unavoidable time delay in controllers and actuators theeffects of time delay are considered in the active control strat-egy The active control strategy is usually the time-delayedlinear velocity or time-delayed linear displacement controlstrategy Few studies have drawn attention to the active con-trol of the HSLDS vibration isolator Sun et al [21] used thetime-delayed linear displacement control strategy to obtainbetter isolation performance around the resonance frequencyband under both force and base excitation Although thesementioned strategies can be used to achieve better isolationperformance of the HSLDS vibration isolator around theresonance frequency band and obtain a larger isolationfrequency band under both force and base excitation thedilemma as the passive vibration isolator case can exist inthese active control strategies So in order to overcome thisdilemma this paper proposes the time-delayed cubic velocityfeedback control strategy Compared to the above-mentionedstrategies the time-delayed cubic velocity feedback controlstrategy can not only obtain better isolation performancearound the resonance frequency band and obtain a largerisolation frequency but also achieve a better performance inthe high frequency band where the isolation is required
The organization of this paper is as follows A HSLDSvibration isolator with time-delayed cubic velocity feedbackcontrol is presented and brief description of static analysisis shown in Section 2 In Section 3 the primary resonanceof the controlled HSLDS vibration isolator is obtained byusing the multiple scales method The jump phenomenonanalysis of the controlled system without and with time delayis investigated by using the Sylvester resultant method andoptimization method respectively The stability analysis ofthe controlled system is then studied The effects of thefeedback gain and time delay on the primary resonance jumpphenomenon and stability are also considered In Section 4the 13 subharmonic resonance is studied by using themultiple scales method The effects of the feedback gain andtime delay on the existence regions where 13 subharmonicresonance occurs are also presented In Section 5 the forcetransmissibility of the controlled HSLDS vibration isolatoris obtained and compared with an equivalent linear passivevibration isolator Conclusions are drawn in Section 6
2 Modeling of a HSLDS Vibration Isolator
A HSLDS vibration isolator with time-delayed cubic velocityfeedback control is shown in Figure 1 The HSLDS vibrationisolator is comprised of vertical spring used as load bearingelement and two symmetric stiffness correctors providingnegative stiffness
Actuator
Controller
Initial position
SensorL
L0
Kh
120582 K C
m
mx
x(t)
fe
Figure 1 Scheme of a HSLDS vibration isolator with time-delayedcubic velocity feedback control
Figure 1 also shows when loading a mass 119898 the system isbalanced at the static equilibriumpositionThe stiffness of thevertical and horizontal springs is119870V and119870ℎ the initial lengthof the horizontal springs is 1198710 the compression deformationof the horizontal springs when the system is at the staticequilibrium position is 120582 the length of the connectingelement is 119871 119909 is the displacement of the mass from the staticequilibrium position the damping coefficient of the dampingis 119862 and the excitation is force excitation with a harmonicforce 119891119890 = 119865119890 cos(119908119905) The velocity of the mass is measuredby the sensor the velocity signal can be exported to acertain cubic velocity feedback signal through the nonlinearcontroller and actuator Because of the unavoidable timedelay in the controller and actuator the effects of time delayshould be considered then the time-delayed cubic velocityfeedback control strategy can be implemented
The force-displacement and stiffness-displacement rela-tionships of the system are given as
119865 = 119870V119909 minus 2119870ℎ [120582 minus (119871 minus radic1198712minus 1199092)]
119909
radic1198712minus 1199092 (1a)
119870 = (119870V minus 2119870ℎ) +
2119870ℎ (119871 minus 120582) 1198712
(1198712minus 1199092)32
(1b)
Equations (1a) and (1b) can be written in nondimensionalform as
119865 = (1 minus 2119896) 119909 + 2119896 (1 minus120582)
119909
radic1 minus 1199092 (2a)
= (1 minus 2119896) +
2119896 (1 minus120582)
(1 minus 1199092)32
(2b)
where 119909 = 119909119871 120582 = 120582119871 119896 = 119870ℎ119870V 119865 = 119865(119870V119871) and = 119870119870V
Shock and Vibration 3
0 01 02 03 04 05
0005
01015
02
minus05 minus04 minus03 minus02 minus01minus02
minus015
minus01
minus005
F
x
= 04
= 045
= 05
= 055
0
02
04
06
08
1
12
0 01 02 03 04 05minus05 minus04 minus03 minus02 minus01minus02
x
K
= 04
= 045
= 05
= 055
Figure 2 Nondimensional force-displacement and stiffness-displacement curves
The nondimensional stiffness at the static equilibriumposition can be obtained by substituting 119909 = 0 into (2b)
119904 = 1 minus 2119896120582 (3)
If the stiffness of the HSLDS vibration isolator is zero atthe static equilibriumposition the quasi-zero-stiffness (QZS)characteristic can be obtained then the value of 120582 is given as
120582qzs =
1
2119896
(4)
The nondimensional force-displacement and stiffness-displacement curves of the HSLDS vibration isolator forvarious values of 120582 when 119896 = 1 are shown in Figure 2 It canbe clearly seen that if 120582 =
120582qzs the negative stiffness provided
by the stiffness correctors is exactly balanced by the positivestiffness of the vertical spring in the vertical direction at thestatic equilibrium position then the QZS characteristic canbe achieved If 120582 gt
120582qzs the stiffness is negative in the neigh-
borhood of the static equilibrium position then the systemcan be unstable which is an undesirable condition in practicalengineering Because of some inevitable errors in practicalconditions the QZS characteristic can be hard to achieve andin order to ensure the system stability the stiffness of thesystem should keep a small positive value at the static equi-librium position so the system can have a common HSLDScharacteristic In this paper the case 120582 lt
120582qzs is considered
When the amplitude of the displacement is small thenondimensional force and stiffness can be expanded as a Tay-lor series at the static equilibriumposition119909 = 0 for simplicity
119865119886 (119909) = (1 minus 2119896120582) 119909 + 119896 (1 minus
120582) 1199093= 120572119909 + 120574119909
3 (5a)
119886 (119909) = 120572 + 31205741199092 (5b)
120572 = 1 minus 2119896120582 (5c)
120574 = 119896 (1 minus120582) (5d)
3 Primary Resonance
31 Steady State Resonance The dynamic equation of theHSLDS vibration isolator with time-delayed cubic velocityfeedback control under harmonic force excitation usingthird-order Taylor series expansion is given as
119898 + 119862 + 11986233(119905 minus 120575) + 119870V120572119909 + 120574119870V
1199093
1198712= 119865119890 cos119908119905 (6)
where 1198623 and 120575 are the feedback gain and time delayrespectively the dots denote derivatives with respect to time119905 Equation (6) can be written in nondimensional form as
11990910158401015840+ 21205771119909
1015840+ 21205773119909
10158403(119879 minus 120591) + 119909 + 120573119909
3= 1198911 cosΩ119879 (7)
where 119909 = 119909119871 1205771 = 119862(2119898119908119899) 1205773 = 11986231198712119908119899(2119898) 120573 = 120574120572
119908119899 =radic120572119870V119898 Ω = 119908119908119899 119879 = 119908119899119905 1198911 = 119865119890(120572119870V119871) and
120591 = 119908119899120575 The primes denote derivatives with respect to 119879To analyze the primary resonance of the controlled systemunder force excitation by using the multiple scales method itis assumed that
1205771 = 1205761205771
(8a)
1205773 = 1205761205773
(8b)
120573 = 120576120573 (8c)
1198911 = 120576119891 (8d)
Ω2= 1 + 120576120590 (8e)
where 120576 is a formal small parameter and 120590 is the detuningfrequency Then it is convenient to rewrite (7) as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591)
+ (Ω2minus 120576120590) 119909 + 120576
1205731199093= 120576119891 cosΩ119879
(9)
For simplicity assuming a two-scale expansion of (9) as
119909 (120591) = 1199090 (1198790 1198791) + 1205761199091 (1198790 1198791) + 119874 (1205762)
119879119899 = 120576119899119879 119899 = 0 1
(10)
4 Shock and Vibration
and using the following differential operators [22]
119889
119889119879
=
120597
1205971198790
+ 120576
120597
1205971198791
+ 119874 (1205762) = 1198630 + 1205761198631 + 119874 (120576
2)
1198892
1198891198792= 1198632
0+ 212057611986301198631 + 119874 (120576
2)
(11)
Substituting (10) and (11) into (9) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 + Ω
21199090 = 0 (12a)
1198632
01199091 + Ω
21199091 = minus2119863011986311199090 minus 2
120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0
+ 1205901199090 + 119891 cosΩ1198790
(12b)
The solution of (12a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895Ω1198790
+ 119888119888 (13a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(13b)
where 119888119888 denotes the conjugate term and the amplitude 119886 andphase Φ are functions of the slow time scale 1198791 Substituting(13a) into (12b) and removing secular terms from (12b)require
minus 1198952Ω1198631119860 minus 11989521205851Ω119860 minus 3
1205731198602119860
minus 11989561205773Ω31198602119860119890minus119895Ω120591
+ 120590119860 +
119891
2
= 0
(14)
Substituting (13b) into (14) and separating the real andimaginary terms the following equations can be obtained
1198861015840= minus
1
Ω
(Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 +
119891
2
sinΦ) (15a)
119886Φ1015840=
1
Ω
(minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 minus
119891
2
cosΦ)
(15b)
The steady state solutions of (9) for the primary resonancecorresponding to the fixed points are given as
Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 = minus
119891
2
sinΦ (16a)
minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 =
119891
2
cosΦ (16b)
Then the amplitude-frequency and phase-frequency rela-tionships using the original structural parameter can be givenby
(2Ω1205771119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863minus
3
2
1205773Ω31198863 sinΩ120591)
2
= 1198912
1
(17a)
tanΦ =
(Ω2minus 1) 119886 minus (34) 120573119886
3minus (32) 1205773Ω
31198863 sinΩ120591
2Ω1205771119886 + (32) 1205773Ω31198863 cosΩ120591
(17b)
From (17a) it can be seen that the primary resonanceof the controlled system is greatly influenced by the nondi-mensional feedback gain 1205773 and time delay 120591 when the otherstructural parameters and excitation force amplitude arechosen The effects of these two parameters on the primaryresonance can be seen by defining the equivalent dampingratio and equivalent resonance frequency as follows
120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 (18a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591 (18b)
Figure 3 shows the amplitude-frequency and phase-frequency relationships of the primary resonance for thecontrolled system under different feedback gain 1205773 withouttime delay When the time delay 120591 = 0 the feedback gain 1205773
only appears in the equivalent damping ratio term and (18a)and (18b) simplify into
120577eq = 1205771 +
3
4
1205773Ω21198862 (19a)
1199082
eq = 1 +
3
4
1205731198862 (19b)
The effect of the feedback gain 1205773 on the primary res-onance can be clearly seen in Figure 3 When the lineardamping ratio 1205771 is small and the system is uncontrolled thepeak amplitude of the primary resonance takes a larger valueand the jump phenomenon occurs When the feedback gain1205773 increases the equivalent damping ratio becomes largerthe peak amplitude of the primary resonance decreasesthe equivalent resonance frequency decreases and the jumpphenomenon can be avoided
When the time delay 120591 exists in the controlled systemthe following inequalities of the equivalent damping ratio andequivalent resonance frequency can be obtained
1205771 minus
3
4
1205773Ω21198862le 120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 le 1205771 +
3
4
1205773Ω21198862
(20a)
Shock and Vibration 5
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
Uncontrolled
a
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Uncontrolled
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
08 1 12 14 16 18 2 22minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
Φ
Figure 3 Amplitude-frequency and phase-frequency relationships of the primary resonance for the controlled system under differentfeedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005 119896 = 1 and
120582 = 04)
1 +
3
4
1205731198862minus
3
2
1205773Ω31198862le 1199082
eq
= 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591
le 1 +
3
4
1205731198862+
3
2
1205773Ω31198862
(20b)
Obviously compared to the controlled system withouttime delay when time delay 120591 exists it can decrease theequivalent damping ratio then the peak amplitude increasesthe equivalent resonance frequency can also increase whichleads to an undesirable isolation performance In the primaryresonance region assuming that Ω asymp 1 the equivalentdamping ratio and equivalent resonance frequency can beapproximated as
120577eq = 1205771 +
3
4
12057731198862 cos 120591 (21a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
12057731198862 sin 120591 (21b)
Then the equivalent damping ratio and equivalent res-onance frequency can be approximately considered as theperiodic functions in 2120587 periods Based on this assumptionthe effect of the time delay 120591 on the primary resonance canbe clearly seen in Figure 4 When the time delay 120591 lies inthe ranges of [0 1205872) and [31205872 2120587) the equivalent dampingratio is larger than the linear damping ratio then the peakamplitude and resonance frequency are smaller than theuncontrolled system which can achieve a better isolationperformance in the primary resonance region the equivalentdamping ratio takes a major effect on the peak amplitudeand resonance frequency in these two ranges When thetime delay 120591 lies in the range of [1205872 120587] the equivalentdamping ratio is smaller than the linear damping ratio and theequivalent resonance frequency is larger resulting in a poorerisolation performance in the primary resonance region thanthe uncontrolled system When the time delay 120591 lies in therange of (120587 31205872) although the equivalent damping ratiois smaller than the linear damping ratio the equivalent
resonance frequency is smaller and takes amajor effect on thepeak amplitude and resonance frequency the peak amplitudeand resonance frequency are smaller which can achieve abetter isolation performance in the primary resonance regioncompared to the uncontrolled system
Figure 4 also shows the numerical results obtained bysolving (7) using the fourth order Runge-Kutta method theanalytic method gives very well results compared with thenumerical results But when the time delay 120591 takes somespecial values a closed-loop response curve [23] emergesabove the primary resonance because multiple solutions existin these frequency bands some closed-loop response curvescan be estimated by numerical results and some cannot bewhich are due to their stability In Figures 4(c) 4(d) 4(e) and4(i) some parts of the upper branch of the primary resonancecannot also be estimated by numerical results which arealso due to their stability Stability analysis of the controlledsystem will be investigated in the stability analysis part
As can be clearly seen in Figures 3 and 4 the feedback gain1205773mostly influences the vibration amplitude of the controlledsystem around the resonance frequency band When thefeedback gain 1205773 changes the vibration amplitudes of thecontrolled system in the low and high frequency bands arealmost the same as the uncontrolled system Figure 5 showsthe effect of the time delay 120591 on the primary resonance for thecontrolled system with different feedback gain 1205773 around theresonance frequency band In this case only one single vibra-tion amplitude is considered the frequency Ω is chosen as 1and 11 respectively and the stability analysis of the vibrationamplitude is also investigated in the stability analysis part
The vibration amplitude is a periodic function of timedelay 120591 which can be seen in (17a) In the first half periodthe vibration amplitude decreases with the increase offeedback gain 1205773 while in the latter half period the vibrationamplitude first increases and then decreases with the increaseof feedback gain 1205773 Figure 6 shows the corresponding ampli-tude-frequency relationships of the primary resonance forthe controlled system with different feedback gain 1205773 When120591 = 1205874 lies in the range of the first half period with theincrease of feedback gain 1205773 the vibration amplitude around
6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
0 01 02 03 04 05
0005
01015
02
minus05 minus04 minus03 minus02 minus01minus02
minus015
minus01
minus005
F
x
= 04
= 045
= 05
= 055
0
02
04
06
08
1
12
0 01 02 03 04 05minus05 minus04 minus03 minus02 minus01minus02
x
K
= 04
= 045
= 05
= 055
Figure 2 Nondimensional force-displacement and stiffness-displacement curves
The nondimensional stiffness at the static equilibriumposition can be obtained by substituting 119909 = 0 into (2b)
119904 = 1 minus 2119896120582 (3)
If the stiffness of the HSLDS vibration isolator is zero atthe static equilibriumposition the quasi-zero-stiffness (QZS)characteristic can be obtained then the value of 120582 is given as
120582qzs =
1
2119896
(4)
The nondimensional force-displacement and stiffness-displacement curves of the HSLDS vibration isolator forvarious values of 120582 when 119896 = 1 are shown in Figure 2 It canbe clearly seen that if 120582 =
120582qzs the negative stiffness provided
by the stiffness correctors is exactly balanced by the positivestiffness of the vertical spring in the vertical direction at thestatic equilibrium position then the QZS characteristic canbe achieved If 120582 gt
120582qzs the stiffness is negative in the neigh-
borhood of the static equilibrium position then the systemcan be unstable which is an undesirable condition in practicalengineering Because of some inevitable errors in practicalconditions the QZS characteristic can be hard to achieve andin order to ensure the system stability the stiffness of thesystem should keep a small positive value at the static equi-librium position so the system can have a common HSLDScharacteristic In this paper the case 120582 lt
120582qzs is considered
When the amplitude of the displacement is small thenondimensional force and stiffness can be expanded as a Tay-lor series at the static equilibriumposition119909 = 0 for simplicity
119865119886 (119909) = (1 minus 2119896120582) 119909 + 119896 (1 minus
120582) 1199093= 120572119909 + 120574119909
3 (5a)
119886 (119909) = 120572 + 31205741199092 (5b)
120572 = 1 minus 2119896120582 (5c)
120574 = 119896 (1 minus120582) (5d)
3 Primary Resonance
31 Steady State Resonance The dynamic equation of theHSLDS vibration isolator with time-delayed cubic velocityfeedback control under harmonic force excitation usingthird-order Taylor series expansion is given as
119898 + 119862 + 11986233(119905 minus 120575) + 119870V120572119909 + 120574119870V
1199093
1198712= 119865119890 cos119908119905 (6)
where 1198623 and 120575 are the feedback gain and time delayrespectively the dots denote derivatives with respect to time119905 Equation (6) can be written in nondimensional form as
11990910158401015840+ 21205771119909
1015840+ 21205773119909
10158403(119879 minus 120591) + 119909 + 120573119909
3= 1198911 cosΩ119879 (7)
where 119909 = 119909119871 1205771 = 119862(2119898119908119899) 1205773 = 11986231198712119908119899(2119898) 120573 = 120574120572
119908119899 =radic120572119870V119898 Ω = 119908119908119899 119879 = 119908119899119905 1198911 = 119865119890(120572119870V119871) and
120591 = 119908119899120575 The primes denote derivatives with respect to 119879To analyze the primary resonance of the controlled systemunder force excitation by using the multiple scales method itis assumed that
1205771 = 1205761205771
(8a)
1205773 = 1205761205773
(8b)
120573 = 120576120573 (8c)
1198911 = 120576119891 (8d)
Ω2= 1 + 120576120590 (8e)
where 120576 is a formal small parameter and 120590 is the detuningfrequency Then it is convenient to rewrite (7) as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591)
+ (Ω2minus 120576120590) 119909 + 120576
1205731199093= 120576119891 cosΩ119879
(9)
For simplicity assuming a two-scale expansion of (9) as
119909 (120591) = 1199090 (1198790 1198791) + 1205761199091 (1198790 1198791) + 119874 (1205762)
119879119899 = 120576119899119879 119899 = 0 1
(10)
4 Shock and Vibration
and using the following differential operators [22]
119889
119889119879
=
120597
1205971198790
+ 120576
120597
1205971198791
+ 119874 (1205762) = 1198630 + 1205761198631 + 119874 (120576
2)
1198892
1198891198792= 1198632
0+ 212057611986301198631 + 119874 (120576
2)
(11)
Substituting (10) and (11) into (9) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 + Ω
21199090 = 0 (12a)
1198632
01199091 + Ω
21199091 = minus2119863011986311199090 minus 2
120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0
+ 1205901199090 + 119891 cosΩ1198790
(12b)
The solution of (12a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895Ω1198790
+ 119888119888 (13a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(13b)
where 119888119888 denotes the conjugate term and the amplitude 119886 andphase Φ are functions of the slow time scale 1198791 Substituting(13a) into (12b) and removing secular terms from (12b)require
minus 1198952Ω1198631119860 minus 11989521205851Ω119860 minus 3
1205731198602119860
minus 11989561205773Ω31198602119860119890minus119895Ω120591
+ 120590119860 +
119891
2
= 0
(14)
Substituting (13b) into (14) and separating the real andimaginary terms the following equations can be obtained
1198861015840= minus
1
Ω
(Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 +
119891
2
sinΦ) (15a)
119886Φ1015840=
1
Ω
(minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 minus
119891
2
cosΦ)
(15b)
The steady state solutions of (9) for the primary resonancecorresponding to the fixed points are given as
Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 = minus
119891
2
sinΦ (16a)
minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 =
119891
2
cosΦ (16b)
Then the amplitude-frequency and phase-frequency rela-tionships using the original structural parameter can be givenby
(2Ω1205771119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863minus
3
2
1205773Ω31198863 sinΩ120591)
2
= 1198912
1
(17a)
tanΦ =
(Ω2minus 1) 119886 minus (34) 120573119886
3minus (32) 1205773Ω
31198863 sinΩ120591
2Ω1205771119886 + (32) 1205773Ω31198863 cosΩ120591
(17b)
From (17a) it can be seen that the primary resonanceof the controlled system is greatly influenced by the nondi-mensional feedback gain 1205773 and time delay 120591 when the otherstructural parameters and excitation force amplitude arechosen The effects of these two parameters on the primaryresonance can be seen by defining the equivalent dampingratio and equivalent resonance frequency as follows
120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 (18a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591 (18b)
Figure 3 shows the amplitude-frequency and phase-frequency relationships of the primary resonance for thecontrolled system under different feedback gain 1205773 withouttime delay When the time delay 120591 = 0 the feedback gain 1205773
only appears in the equivalent damping ratio term and (18a)and (18b) simplify into
120577eq = 1205771 +
3
4
1205773Ω21198862 (19a)
1199082
eq = 1 +
3
4
1205731198862 (19b)
The effect of the feedback gain 1205773 on the primary res-onance can be clearly seen in Figure 3 When the lineardamping ratio 1205771 is small and the system is uncontrolled thepeak amplitude of the primary resonance takes a larger valueand the jump phenomenon occurs When the feedback gain1205773 increases the equivalent damping ratio becomes largerthe peak amplitude of the primary resonance decreasesthe equivalent resonance frequency decreases and the jumpphenomenon can be avoided
When the time delay 120591 exists in the controlled systemthe following inequalities of the equivalent damping ratio andequivalent resonance frequency can be obtained
1205771 minus
3
4
1205773Ω21198862le 120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 le 1205771 +
3
4
1205773Ω21198862
(20a)
Shock and Vibration 5
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
Uncontrolled
a
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Uncontrolled
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
08 1 12 14 16 18 2 22minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
Φ
Figure 3 Amplitude-frequency and phase-frequency relationships of the primary resonance for the controlled system under differentfeedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005 119896 = 1 and
120582 = 04)
1 +
3
4
1205731198862minus
3
2
1205773Ω31198862le 1199082
eq
= 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591
le 1 +
3
4
1205731198862+
3
2
1205773Ω31198862
(20b)
Obviously compared to the controlled system withouttime delay when time delay 120591 exists it can decrease theequivalent damping ratio then the peak amplitude increasesthe equivalent resonance frequency can also increase whichleads to an undesirable isolation performance In the primaryresonance region assuming that Ω asymp 1 the equivalentdamping ratio and equivalent resonance frequency can beapproximated as
120577eq = 1205771 +
3
4
12057731198862 cos 120591 (21a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
12057731198862 sin 120591 (21b)
Then the equivalent damping ratio and equivalent res-onance frequency can be approximately considered as theperiodic functions in 2120587 periods Based on this assumptionthe effect of the time delay 120591 on the primary resonance canbe clearly seen in Figure 4 When the time delay 120591 lies inthe ranges of [0 1205872) and [31205872 2120587) the equivalent dampingratio is larger than the linear damping ratio then the peakamplitude and resonance frequency are smaller than theuncontrolled system which can achieve a better isolationperformance in the primary resonance region the equivalentdamping ratio takes a major effect on the peak amplitudeand resonance frequency in these two ranges When thetime delay 120591 lies in the range of [1205872 120587] the equivalentdamping ratio is smaller than the linear damping ratio and theequivalent resonance frequency is larger resulting in a poorerisolation performance in the primary resonance region thanthe uncontrolled system When the time delay 120591 lies in therange of (120587 31205872) although the equivalent damping ratiois smaller than the linear damping ratio the equivalent
resonance frequency is smaller and takes amajor effect on thepeak amplitude and resonance frequency the peak amplitudeand resonance frequency are smaller which can achieve abetter isolation performance in the primary resonance regioncompared to the uncontrolled system
Figure 4 also shows the numerical results obtained bysolving (7) using the fourth order Runge-Kutta method theanalytic method gives very well results compared with thenumerical results But when the time delay 120591 takes somespecial values a closed-loop response curve [23] emergesabove the primary resonance because multiple solutions existin these frequency bands some closed-loop response curvescan be estimated by numerical results and some cannot bewhich are due to their stability In Figures 4(c) 4(d) 4(e) and4(i) some parts of the upper branch of the primary resonancecannot also be estimated by numerical results which arealso due to their stability Stability analysis of the controlledsystem will be investigated in the stability analysis part
As can be clearly seen in Figures 3 and 4 the feedback gain1205773mostly influences the vibration amplitude of the controlledsystem around the resonance frequency band When thefeedback gain 1205773 changes the vibration amplitudes of thecontrolled system in the low and high frequency bands arealmost the same as the uncontrolled system Figure 5 showsthe effect of the time delay 120591 on the primary resonance for thecontrolled system with different feedback gain 1205773 around theresonance frequency band In this case only one single vibra-tion amplitude is considered the frequency Ω is chosen as 1and 11 respectively and the stability analysis of the vibrationamplitude is also investigated in the stability analysis part
The vibration amplitude is a periodic function of timedelay 120591 which can be seen in (17a) In the first half periodthe vibration amplitude decreases with the increase offeedback gain 1205773 while in the latter half period the vibrationamplitude first increases and then decreases with the increaseof feedback gain 1205773 Figure 6 shows the corresponding ampli-tude-frequency relationships of the primary resonance forthe controlled system with different feedback gain 1205773 When120591 = 1205874 lies in the range of the first half period with theincrease of feedback gain 1205773 the vibration amplitude around
6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
and using the following differential operators [22]
119889
119889119879
=
120597
1205971198790
+ 120576
120597
1205971198791
+ 119874 (1205762) = 1198630 + 1205761198631 + 119874 (120576
2)
1198892
1198891198792= 1198632
0+ 212057611986301198631 + 119874 (120576
2)
(11)
Substituting (10) and (11) into (9) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 + Ω
21199090 = 0 (12a)
1198632
01199091 + Ω
21199091 = minus2119863011986311199090 minus 2
120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0
+ 1205901199090 + 119891 cosΩ1198790
(12b)
The solution of (12a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895Ω1198790
+ 119888119888 (13a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(13b)
where 119888119888 denotes the conjugate term and the amplitude 119886 andphase Φ are functions of the slow time scale 1198791 Substituting(13a) into (12b) and removing secular terms from (12b)require
minus 1198952Ω1198631119860 minus 11989521205851Ω119860 minus 3
1205731198602119860
minus 11989561205773Ω31198602119860119890minus119895Ω120591
+ 120590119860 +
119891
2
= 0
(14)
Substituting (13b) into (14) and separating the real andimaginary terms the following equations can be obtained
1198861015840= minus
1
Ω
(Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 +
119891
2
sinΦ) (15a)
119886Φ1015840=
1
Ω
(minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 minus
119891
2
cosΦ)
(15b)
The steady state solutions of (9) for the primary resonancecorresponding to the fixed points are given as
Ω1205771119886 +
3
4
1205773Ω31198863 cosΩ120591 = minus
119891
2
sinΦ (16a)
minus
1
2
120590119886 +
3
8
1205731198863+
3
4
1205773Ω31198863 sinΩ120591 =
119891
2
cosΦ (16b)
Then the amplitude-frequency and phase-frequency rela-tionships using the original structural parameter can be givenby
(2Ω1205771119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863minus
3
2
1205773Ω31198863 sinΩ120591)
2
= 1198912
1
(17a)
tanΦ =
(Ω2minus 1) 119886 minus (34) 120573119886
3minus (32) 1205773Ω
31198863 sinΩ120591
2Ω1205771119886 + (32) 1205773Ω31198863 cosΩ120591
(17b)
From (17a) it can be seen that the primary resonanceof the controlled system is greatly influenced by the nondi-mensional feedback gain 1205773 and time delay 120591 when the otherstructural parameters and excitation force amplitude arechosen The effects of these two parameters on the primaryresonance can be seen by defining the equivalent dampingratio and equivalent resonance frequency as follows
120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 (18a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591 (18b)
Figure 3 shows the amplitude-frequency and phase-frequency relationships of the primary resonance for thecontrolled system under different feedback gain 1205773 withouttime delay When the time delay 120591 = 0 the feedback gain 1205773
only appears in the equivalent damping ratio term and (18a)and (18b) simplify into
120577eq = 1205771 +
3
4
1205773Ω21198862 (19a)
1199082
eq = 1 +
3
4
1205731198862 (19b)
The effect of the feedback gain 1205773 on the primary res-onance can be clearly seen in Figure 3 When the lineardamping ratio 1205771 is small and the system is uncontrolled thepeak amplitude of the primary resonance takes a larger valueand the jump phenomenon occurs When the feedback gain1205773 increases the equivalent damping ratio becomes largerthe peak amplitude of the primary resonance decreasesthe equivalent resonance frequency decreases and the jumpphenomenon can be avoided
When the time delay 120591 exists in the controlled systemthe following inequalities of the equivalent damping ratio andequivalent resonance frequency can be obtained
1205771 minus
3
4
1205773Ω21198862le 120577eq = 1205771 +
3
4
1205773Ω21198862 cosΩ120591 le 1205771 +
3
4
1205773Ω21198862
(20a)
Shock and Vibration 5
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
Uncontrolled
a
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Uncontrolled
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
08 1 12 14 16 18 2 22minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
Φ
Figure 3 Amplitude-frequency and phase-frequency relationships of the primary resonance for the controlled system under differentfeedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005 119896 = 1 and
120582 = 04)
1 +
3
4
1205731198862minus
3
2
1205773Ω31198862le 1199082
eq
= 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591
le 1 +
3
4
1205731198862+
3
2
1205773Ω31198862
(20b)
Obviously compared to the controlled system withouttime delay when time delay 120591 exists it can decrease theequivalent damping ratio then the peak amplitude increasesthe equivalent resonance frequency can also increase whichleads to an undesirable isolation performance In the primaryresonance region assuming that Ω asymp 1 the equivalentdamping ratio and equivalent resonance frequency can beapproximated as
120577eq = 1205771 +
3
4
12057731198862 cos 120591 (21a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
12057731198862 sin 120591 (21b)
Then the equivalent damping ratio and equivalent res-onance frequency can be approximately considered as theperiodic functions in 2120587 periods Based on this assumptionthe effect of the time delay 120591 on the primary resonance canbe clearly seen in Figure 4 When the time delay 120591 lies inthe ranges of [0 1205872) and [31205872 2120587) the equivalent dampingratio is larger than the linear damping ratio then the peakamplitude and resonance frequency are smaller than theuncontrolled system which can achieve a better isolationperformance in the primary resonance region the equivalentdamping ratio takes a major effect on the peak amplitudeand resonance frequency in these two ranges When thetime delay 120591 lies in the range of [1205872 120587] the equivalentdamping ratio is smaller than the linear damping ratio and theequivalent resonance frequency is larger resulting in a poorerisolation performance in the primary resonance region thanthe uncontrolled system When the time delay 120591 lies in therange of (120587 31205872) although the equivalent damping ratiois smaller than the linear damping ratio the equivalent
resonance frequency is smaller and takes amajor effect on thepeak amplitude and resonance frequency the peak amplitudeand resonance frequency are smaller which can achieve abetter isolation performance in the primary resonance regioncompared to the uncontrolled system
Figure 4 also shows the numerical results obtained bysolving (7) using the fourth order Runge-Kutta method theanalytic method gives very well results compared with thenumerical results But when the time delay 120591 takes somespecial values a closed-loop response curve [23] emergesabove the primary resonance because multiple solutions existin these frequency bands some closed-loop response curvescan be estimated by numerical results and some cannot bewhich are due to their stability In Figures 4(c) 4(d) 4(e) and4(i) some parts of the upper branch of the primary resonancecannot also be estimated by numerical results which arealso due to their stability Stability analysis of the controlledsystem will be investigated in the stability analysis part
As can be clearly seen in Figures 3 and 4 the feedback gain1205773mostly influences the vibration amplitude of the controlledsystem around the resonance frequency band When thefeedback gain 1205773 changes the vibration amplitudes of thecontrolled system in the low and high frequency bands arealmost the same as the uncontrolled system Figure 5 showsthe effect of the time delay 120591 on the primary resonance for thecontrolled system with different feedback gain 1205773 around theresonance frequency band In this case only one single vibra-tion amplitude is considered the frequency Ω is chosen as 1and 11 respectively and the stability analysis of the vibrationamplitude is also investigated in the stability analysis part
The vibration amplitude is a periodic function of timedelay 120591 which can be seen in (17a) In the first half periodthe vibration amplitude decreases with the increase offeedback gain 1205773 while in the latter half period the vibrationamplitude first increases and then decreases with the increaseof feedback gain 1205773 Figure 6 shows the corresponding ampli-tude-frequency relationships of the primary resonance forthe controlled system with different feedback gain 1205773 When120591 = 1205874 lies in the range of the first half period with theincrease of feedback gain 1205773 the vibration amplitude around
6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
Uncontrolled
a
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Uncontrolled
Ω
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
08 1 12 14 16 18 2 22minus180
minus160
minus140
minus120
minus100
minus80
minus60
minus40
minus20
0
Φ
Figure 3 Amplitude-frequency and phase-frequency relationships of the primary resonance for the controlled system under differentfeedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005 119896 = 1 and
120582 = 04)
1 +
3
4
1205731198862minus
3
2
1205773Ω31198862le 1199082
eq
= 1 +
3
4
1205731198862+
3
2
1205773Ω31198862 sinΩ120591
le 1 +
3
4
1205731198862+
3
2
1205773Ω31198862
(20b)
Obviously compared to the controlled system withouttime delay when time delay 120591 exists it can decrease theequivalent damping ratio then the peak amplitude increasesthe equivalent resonance frequency can also increase whichleads to an undesirable isolation performance In the primaryresonance region assuming that Ω asymp 1 the equivalentdamping ratio and equivalent resonance frequency can beapproximated as
120577eq = 1205771 +
3
4
12057731198862 cos 120591 (21a)
1199082
eq = 1 +
3
4
1205731198862+
3
2
12057731198862 sin 120591 (21b)
Then the equivalent damping ratio and equivalent res-onance frequency can be approximately considered as theperiodic functions in 2120587 periods Based on this assumptionthe effect of the time delay 120591 on the primary resonance canbe clearly seen in Figure 4 When the time delay 120591 lies inthe ranges of [0 1205872) and [31205872 2120587) the equivalent dampingratio is larger than the linear damping ratio then the peakamplitude and resonance frequency are smaller than theuncontrolled system which can achieve a better isolationperformance in the primary resonance region the equivalentdamping ratio takes a major effect on the peak amplitudeand resonance frequency in these two ranges When thetime delay 120591 lies in the range of [1205872 120587] the equivalentdamping ratio is smaller than the linear damping ratio and theequivalent resonance frequency is larger resulting in a poorerisolation performance in the primary resonance region thanthe uncontrolled system When the time delay 120591 lies in therange of (120587 31205872) although the equivalent damping ratiois smaller than the linear damping ratio the equivalent
resonance frequency is smaller and takes amajor effect on thepeak amplitude and resonance frequency the peak amplitudeand resonance frequency are smaller which can achieve abetter isolation performance in the primary resonance regioncompared to the uncontrolled system
Figure 4 also shows the numerical results obtained bysolving (7) using the fourth order Runge-Kutta method theanalytic method gives very well results compared with thenumerical results But when the time delay 120591 takes somespecial values a closed-loop response curve [23] emergesabove the primary resonance because multiple solutions existin these frequency bands some closed-loop response curvescan be estimated by numerical results and some cannot bewhich are due to their stability In Figures 4(c) 4(d) 4(e) and4(i) some parts of the upper branch of the primary resonancecannot also be estimated by numerical results which arealso due to their stability Stability analysis of the controlledsystem will be investigated in the stability analysis part
As can be clearly seen in Figures 3 and 4 the feedback gain1205773mostly influences the vibration amplitude of the controlledsystem around the resonance frequency band When thefeedback gain 1205773 changes the vibration amplitudes of thecontrolled system in the low and high frequency bands arealmost the same as the uncontrolled system Figure 5 showsthe effect of the time delay 120591 on the primary resonance for thecontrolled system with different feedback gain 1205773 around theresonance frequency band In this case only one single vibra-tion amplitude is considered the frequency Ω is chosen as 1and 11 respectively and the stability analysis of the vibrationamplitude is also investigated in the stability analysis part
The vibration amplitude is a periodic function of timedelay 120591 which can be seen in (17a) In the first half periodthe vibration amplitude decreases with the increase offeedback gain 1205773 while in the latter half period the vibrationamplitude first increases and then decreases with the increaseof feedback gain 1205773 Figure 6 shows the corresponding ampli-tude-frequency relationships of the primary resonance forthe controlled system with different feedback gain 1205773 When120591 = 1205874 lies in the range of the first half period with theincrease of feedback gain 1205773 the vibration amplitude around
6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(a) 120591 = 0
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(b) 120591 = 1205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(c) 120591 = 1205872
08
Unstable region
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(d) 120591 = 31205874
Unstable region
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(e) 120591 = 120587
08 09 1 11 12 13 14 15 16 17 180
01
02
03
04
05
06
07
a
Ω
(f) 120591 = 51205874
09
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(g) 120591 = 31205872
UncontrolledControlledNumerical
08
08 09 1 11 12 13 14 15 16 17 180
01020304050607
a
Ω
(h) 120591 = 71205874
Figure 4 Continued
Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
02
04
06
08
1
aUnstable region
UncontrolledControlledNumerical
08 09 1 11 12 13 14 15 16 17 18Ω
0
(i) 120591 = 2120587
Figure 4 Amplitude-frequency relationships of the primary resonance for the controlled system with different time delay 120591 (1205771 = 00251205773 = 005 1198911 = 005 119896 = 1 and
120582 = 04)
0 1 2 3 4 5 6 7 8 9 10
02
025
03
035
04
045
05
a
120591
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
(a) Ω = 1
a
02025
03035
04045
05055
0 1 2 3 4 5 6 7 8 9 10120591
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
(b) Ω = 11
Figure 5 Effect of the time delay 120591 on the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
a
08 09 1 11 12 130
01
02
03
04
05
06
07
1205773 = 01
1205773 = 05
1205773 = 1
1205773 = 5
Ω
(a) 120591 = 1205874
0010203040506070809
1
1205773 = 005
1205773 = 01
1205773 = 05
1205773 = 1
08 09 1 11 12 13Ω
a
(b) 120591 = 51205874
Figure 6 Amplitude-frequency relationships of the primary resonance for the controlled system with different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
the resonance frequency band decreases and jump phenome-non can be avoided When 120591 = 51205874 lies in the range of thelatter half period with the increase of feedback gain 1205773 thevibration amplitude around the resonance frequency bandfirst increases and then decreases and jump phenomenoncan also be avoided when feedback gain 1205773 increases to alarger value
32 Jump Phenomenon Analysis From Figures 3 and 4 it canbe seen that jump phenomenon can occur in the primaryresonance of the controlled system when the structuralparameters and excitation force amplitude are chosen as somespecific values The primary response amplitude decreases atjump-down frequency and increases at jump-up frequencyJump phenomenon can be detrimental and can probablycause extensive physical damage to the controlled systemdue to the large amplitude changes occurring at jump-downor jump-up frequency So it is beneficial to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies shouldbe determined when jump phenomenon occurs The jumpphenomenon analysis of the controlled system without andwith time delay is investigated respectively in this part
The amplitude-frequency function of the controlled sys-tem without time delay can be simplified into
(2Ω1205771119886 +
3
2
1205773Ω31198863)
2
+ ((Ω2minus 1) 119886 minus
3
4
1205731198863)
2
= 1198912
1 (22)
Equation (22) can be written as a polynomial function inamplitude 119886 or frequencyΩ as follows
119867(Ω 119886) = 11990111198866+ 11990211198864+ 11990311198862+ 1199041
(23a)
1199011 =
9
16
1205732+
9
4
1205772
3Ω6 (23b)
1199021 = 612057711205773Ω4minus
3
2
120573 (Ω2minus 1) (23c)
1199031 = 41205772
1Ω2+ (Ω2minus 1)
2
(23d)
1199041 = minus1198912
1 (23e)
119867(Ω 119886) = 1199012Ω6+ 1199022Ω
4+ 1199032Ω
2+ 1199042
(23f)
1199012 =
9
4
1205772
31198866 (23g)
1199022 = 6120577112057731198864+ 1198862 (23h)
1199032 = minus
3
2
1205731198864+ (41205772
1minus 2) 119886
2 (23i)
1199042 =
9
16
12057321198866+
3
2
1205731198864+ 1198862minus 1198912
1 (23j)
It is inconvenient to solve the amplitude 119886 or frequencyΩin an analytic expression since (23a)ndash(23j) can be treated as acubic function of amplitude 1198862 or frequencyΩ2 it is difficultto determine the critical surface of the structural parametersand jump frequencies based on these analytic expressions So
the method of Sylvester resultant [24] is used in this paperAssuming two polynomials 119891(119909) and 119892(119909) as
119891 (119909) =
119899
sum
119894=0
119886119894119909119894 119886119899 = 0 (24a)
119892 (119909) =
119898
sum
119894=0
119887119894119909119894 119887119898 = 0 (24b)
The Sylvester resultant of 119891(119909) and 119892(119909) can be obtained[25]
R (119891 119892) =
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 0 sdot sdot sdot 0
0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot 1198861 1198860 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot 0 119886119899 119886119899minus1 sdot sdot sdot sdot sdot sdot sdot sdot sdot 1198860
119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot sdot sdot sdot 0
0 119887119898 119887119898minus1 sdot sdot sdot 1198871 1198870 0 sdot sdot sdot 0
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
0 sdot sdot sdot sdot sdot sdot 0 119887119898 119887119898minus1 sdot sdot sdot sdot sdot sdot 1198870
10038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
(25)
A necessary and sufficient condition for two polynomials119891(119909) and 119892(119909) to have a common root is that the SylvesterresultantR(119891 119892) = 0 [26]
When the excitation force amplitude takes a smaller valuefor chosen structural parameter jump phenomenon does notoccur and the amplitude-frequency curve is single-valuedwhich is similar to the linear harmonic excited system thatis there exists a unique value of amplitude 119886 for each value offrequency Ω When the excitation force amplitude increasesto a larger value jump phenomenon can occur due to theexistence of cubic nonlinear terms there exist multiple valuesof amplitude 119886 for each value of frequency Ω in a specificfrequency band Denote 1198911cr as the critical value of the exci-tation force amplitude that is the maximum excitation forceamplitude which leads to no jump phenomenon Denoting(Ωcr 119886cr) as the infection point in the amplitude-frequencycurve when 1198911 = 1198911cr then the function 119867(Ωcr 119886) hasthree positive real roots equal to 119886cr Assuming the functions1198671015840(Ω 119886) and 119867
10158401015840(Ω 119886) as the derivative and second deriva-
tive of the function 119867(Ω 119886) with respect to the amplitude 119886respectively then the function1198671015840(Ωcr 119886)has twopositive realroots equal to 119886cr and the function119867
10158401015840(Ωcr 119886)has one positive
real root equal to 119886cr According to the definition of Sylvesterresultant the resultantR(119867
1015840 11986710158401015840) should be equal to zero at
the infection point (Ωcr 119886cr)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886cr) = R (1198671015840 11986710158401015840)
10038161003816100381610038161003816119886=119886cr
=
10
sum
119894=0
119887119894119886119894
cr = 0 (26)
where the definitions of the coefficients 119887119894 are given in Appen-dix Using (26)Ωcr can be eliminated and can obtain a poly-nomial equation in 119886cr Then the value of 119886cr can be obtained
Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
numerically Of the ten roots of 119866(Ωcr) = 0 there are tworeal and positive roots and the value of 119886cr should be takingthe smaller valueThe critical excitation frequencyΩcr can begiven by substituting 119886cr into the function 119867
10158401015840(Ωcr 119886) Once
the critical excitation frequencyΩcr and critical amplitude 119886crare known the critical excitation force amplitude 1198911cr can beobtained by using (23a) or (23f)
When the excitation force amplitude 1198911 gt 1198911cr jumpphenomenon occurs it is necessary to determine the jump-up and jump-down frequencies Denoting (Ωlowast 119886lowast) as thejump points in the amplitude-frequency curve then thefunction 119867(Ωlowast 119886) has two positive real roots equal to 119886lowastwhich requires that the resultant R(119867119867
1015840) should be equal
to zero at the jump points (Ωlowast 119886lowast)Combining (23a)ndash(23j) and (25) the following equation
can be obtained
119866 (119886lowast) = R (1198671198671015840)
10038161003816100381610038161003816119886=119886lowast
=
18
sum
119894=0
119888119894119886119894
lowast= 0 (27)
where the definitions of the coefficients 119888119894 are given inAppendix Using (27) Ωlowast can be eliminated and can obtaina polynomial equation in 119886lowast Then the value of 119886lowast can beobtained numerically Of the eighteen roots of 119866(Ωcr) = 0there are two real and positive roots the smaller value corre-sponds to the amplitude of jump-up frequency and the largervalue corresponds to the amplitude of jump-down frequencyThe jump frequencies can be obtained by substituting 119886lowast intothe function 119867
1015840(Ωcr 119886) But for each value of 119886lowast there are
two real and positive values of Ωlowast one of which is spuriousTo investigate which one is spurious substitute Ωlowast into thefunction119867(Ωlowast 119886) and check whether there are two real andpositive values equal to 119886lowast or not If there are none then thisparticular value ofΩlowast is spurious and should be discarded
Amplitude-frequency relationship of the primary reso-nance for the controlled system under different excitationforce amplitude without time delay is shown in Figure 7Using themethod of Sylvester resultant the critical excitationforce amplitude 1198911cr = 001102 The infection point (Ωcr 119886cr)can be obtained as (10485 01698) which can be seen inFigure 7 denoted by black asterisk point As discussedpreviously when the excitation force amplitude 1198911 = 003 gt
1198911cr jump phenomenon occurs the jump points (Ωlowast 119886lowast) canalso be determined by the method of Sylvester resultant Thejump-up points and jump-down points can be obtained as(1108 01945) and (1163 03891) respectively which can beseen in Figure 7 denoted by black dot points Figure 8 showsthe critical surface of the structural parameters which leadto no jump phenomenon It is apparent that the reasonablestructural parameter combinations should lie under thecritical surface Figure 8 also shows the partial contours ofthe critical surface the direction of the arrow indicates thereasonable structural parameter combinations which lead tono jump phenomenon
The jump phenomenon analysis of the controlled systemwith time delay is then considered Because the trigonometricfunctions exist in the amplitude-frequency function of theprimary resonance the method of Sylvester resultant cannotbe used in this case The critical boundary which leads to no
a
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
045
Ω
f1 = 0005
f1 = 003
f1cr = 001102
Figure 7 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude without time delay (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
jump phenomenon and jump frequencies will be investigatedby using the optimization method
For the controlled system with time delay when there areno points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 jump phenomenon does not occur[27] But when there are at least two points in the amplitude-frequency curves satisfying the condition 119889Ω119889119886 = 0 thejump phenomenon can occur So the critical condition is thatthere is only one point in the amplitude-frequency curvessatisfying the condition 119889Ω119889119886 = 0 Differentiating bothsides of (17a) with respect to 119886 and substituting the condition119889Ω119889119886 = 0 in it the critical function can be given as
(2Ω1205771 +
3
2
1205773Ω31198862 cosΩ120591)(2Ω1205771 +
9
2
1205773Ω31198862 cosΩ120591)
+ ((Ω2minus 1) minus
3
4
1205731198862minus
3
2
1205773Ω31198862 sinΩ120591)
sdot ((Ω2minus 1) minus
9
4
1205731198862minus
9
2
1205773Ω31198862 sinΩ120591) = 0
(28)
Combining the critical function equation (28) and theamplitude-frequency function equation (17a) the criticalboundary and jump frequencies can be achieved
An example of how to determine the critical excitationforce amplitude 1198911cr by using the optimization method ispresented when the other structural parameters are chosenTheLevenberg-Marquardt (LM) optimizationmethod is con-sidered in this paper Denoting the critical function equation(28) and the amplitude-frequency function equation (17a) asthe objective functions and defining frequency Ω and ampli-tude 119886 as the independent variable Set up the convergenceindex 120578 as 1119890 minus 10 and the maximum number of iterations119873as 2000 For a given critical excitation force amplitude 1198911crthe frequencyΩ and amplitude 119886 can be determined by usingthe LM optimizationmethod tominimize the objective func-tions then the value of objective functions can be obtained
10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and Vibration
001 003 005 007 009 011
000200400600801
1205853 1205851
f1
cr100
10minus1
10minus2
10minus3
001 002 003 004 005 006 007 008 009 01004006008
01012014016018
1205771 = 01
1205771 = 009
1205771 = 008
1205771 = 007
1205773
f1
cr
Figure 8 Critical surface and contours of the critical surface of the controlled system without time delay (119896 = 1 and 120582 = 04)
Substituting the initial guess value of critical excitationforce amplitude 1198911icr into the objective functions and usingthe LM optimization method when the initial value of 1198911icris chosen as a larger one the value of the objective functionsis smaller than the convergence index 120578 which indicates thevalue of 1198911icr is larger and jump phenomenon occurs thefrequency Ω and amplitude 119886 can be obtained as the jumpfrequency and the amplitude of jump frequency respectivelydecreasing the value of 1198911icr slowly until the value of theobjective functions is larger than the convergence index 120578 forthe first time then the critical excitation force amplitude 1198911crcan be obtained when the initial value of 1198911icr is chosen as asmaller one the value of the objective functions is larger thanthe convergence index 120578 which indicates the value of 1198911icr issmaller and jump phenomenon does not occur the obtainedfrequency Ω and amplitude 119886 are spurious and should bediscarded increasing the value of1198911icr slowly until the value ofthe objective functions is smaller than the convergence index120578 for the first time then the critical excitation force amplitude1198911cr can be obtainedThe solution process for determining thecritical excitation force amplitude 1198911icr is an iterative process
The critical border of the controlled system with timedelay 120591 = 1205874 is shown in Figure 9 Using the LM optimiza-tion method the critical excitation force amplitude 1198911cr =
001046 When the excitation force amplitude1198911 = 1198911cr thereis only one point in the amplitude-frequency curves satisfyingthe condition119889Ω119889119886 = 0which corresponds to the boundaryWhen the excitation force amplitude 1198911 gt 1198911cr there aretwo points in the amplitude-frequency curves satisfying thecondition 119889Ω119889119886 = 0 which implies the jump phenomenonWhen the jump phenomenon occurs the jump points canbe determined conveniently by using the LM optimizationmethod Figure 10 shows the amplitude-frequency relation-ship of the primary resonance for the controlled systemunderdifferent excitation force amplitude with time delay 120591 = 1205874When the excitation force amplitude 1198911 = 003 gt 1198911cr thejump-up points and jump-down points can be obtained as(11095 01914) and (11973 04129) respectively which canbe seen in Figure 10 denoted by black dot points
The other critical values of structural parameters forexample damping ratio 1205771 and feedback gain 1205773 can be
determined just as the critical excitation force amplitude casebut the solution process is complicated which can be seen inthe above part so it is no longer discussed here
33 Stability Analysis To analyze the stability of the primaryresponse of the controlled system linearizing (15a) and (15b)with respect to 119886 and Φ gives
1198631Δ119886 = minus(1205771 +
9
4
1205773Ω21198862 cosΩ120591)Δ119886 minus
119891
2
cosΦΔΦ
(29a)
1198631ΔΦ = (
3
4Ω
120573119886 +
3
2
1205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ)Δ119886
+
119891
2Ω119886
sinΦΔΦ
(29b)
The characteristic equation of (29a) and (29b) is given as
det
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119904 + 1205771 +9
41205773Ω21198862 cosΩ120591
119891
2cosΦ
minus(3
4Ω120573119886 +3
21205773Ω2119886 sinΩ120591 +
119891
2Ω1198862cosΦ) 119904 minus
119891
2Ω119886sinΦ
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0
(30)
Equation (30) can be simplified using (16a) and (16b)
1199042minus 1198661119904 + 1198662 = 0 (31a)
1198661 = minus21205771 minus 3
1205773Ω21198862 cosΩ120591 (31b)
1198662 = (1205771 +
3
4
1205773Ω21198862 cosΩ120591)(
1205771 +
9
4
1205773Ω21198862 cosΩ120591)
+
1
Ω2(
120590
2
minus (
3
8
1205731198862+
3
4
1205773Ω31198862 sinΩ120591))
sdot (
120590
2
minus (
9
8
1205731198862+
9
4
1205773Ω31198862 sinΩ120591))
(31c)
Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 11
00005 001 0015 002 0025 003 0035 004 0045 0050
01
02
03
04
05 NoJumpjump
f1
a
0 0005 001 0015 002 0025 003 0035 004 0045 0051
10511
11512
12513
13514
Jump-up frequencyJump-down frequency
Nojump Jump
f1
Ω
Figure 9 Critical border of the controlled system with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and 120582 = 04)
05 06 07 08 09 1 11 12 13 14 150
00501
01502
02503
03504
04505
f1cr = 001046
a
Ω
f1 = 0005
f1 = 003
Figure 10 Amplitude-frequency relationship of the primary res-onance for the controlled system under different excitation forceamplitude with time delay 120591 = 1205874 (1205771 = 0025 1205773 = 005 119896 = 1 and120582 = 04)
According to the Routh-Hurwitz criterion the controlledsystem has stable primary response corresponding to stablenodewhen1198661 lt 0 and1198662 gt 0 has unstable primary responsecorresponding to unstable nodewhen1198661 gt 0 and1198662 gt 0 andhas unstable primary response corresponding to saddle pointwhen1198662 lt 0 Actually the critical condition1198661 = 0 indicatesa pair of purely imaginary eigenvalues exist and hence a Hopfbifurcation occurs [16] For the uncontrolled system 1198661 =
minus21205771 lt 0 and controlled system without time delay 1198661 =
minus21205771 minus 3
1205773Ω21198862lt 0 the Hopf bifurcation can be avoided
The stability boundary of the primary resonance forthe controlled system with different time delay is shown inFigure 11The gray shaded unstable regions denoted by USR1are determined by 1198661 and the green shaded unstable regionsdenoted by USR2 are determined by 1198662 When time delay120591 = 1205874 1198661 gt 0 in the given frequency band and theunstable regions are determined by 1198662 When time delay120591 = 1205872 the unstable regions are determined by both 1198661
and 1198662 The upper branch of the primary resonance is cut
off by the boundary of USR1 determined by 1198661 then theseunstable responses cannot be obtained by numerical methodwhich can be clearly seen in Figure 4(c) When time delay120591 = 71205874 a closed-loop response curve emerges above theprimary resonance It is observed that the lower branch of theclosed-loop response curve is all covered by USR1 and USR2and the upper branch of the closed-loop response curve ispartially covered by USR1 which can also be clearly seen inFigure 4(h) with using numerical method checked
From (31a)ndash(31c) it can be seen that the stability bound-ary of the primary resonance for the controlled system isgreatly influenced by the nondimensional feedback gain 1205773
and time delay 120591 when the other structural parameters andexcitation force amplitude are chosen Two cases are consid-eredwhen investigating the effects of these two parameters onthe stability of vibration amplitude for the controlled systemThe first case is when only one single vibration amplitudeexists and the second case is when three vibration amplitudesmay exist in the controlled system
Figure 12 shows the effect of the time delay 120591 on thestability of vibration amplitude for the controlled systemwith different feedback gain 1205773 The dashed line indicates theunstable vibration amplitude WhenΩ = 11 only one singlevibration amplitude exists in the controlled system Whenfeedback gain 1205773 takes a small value the vibration amplitudeis always stable regardless of the value of time delay 120591 with theincrease of feedback gain 1205773 the vibration amplitude can beunstable for some specific regions of time delay 120591 the unstablesolutions where a Hopf bifurcation occurs are determined by1198661 Behaviour is more complicated when Ω = 13 becausethree vibration amplitudes exist for some specific regions oftime delay 120591 The lowest branch is always stable regardless ofthe value of time delay 120591 and remains the same for differentfeedback gain 1205773 which can be seen in Figure 4The vibrationamplitude of the lowest branch is smaller compared to theupper two branches When feedback gain 1205773 takes a smallvalue the upper branch is stable and the lower branch isunstable which is determined by 1198662 with the increase offeedback gain 1205773 the upper branch can be unstable for somespecific regions of time delay 120591 the unstable solutions wherea Hopf bifurcation occurs are determined by 1198661
12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Shock and Vibration
08 09 1 11 12 13 14 15 160
0102030405060708
a
Ω
(a) 120591 = 1205874
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(b) 120591 = 1205872
08 1 12 14 16 18 20
010203040506070809
1
a
Ω
(c) 120591 = 71205874
Figure 11 Stability boundary of the primary resonance for the controlled system with different time delay 120591 (1205771 = 0025 1205773 = 005 1198911 = 005119896 = 1 and
120582 = 04)
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
0 1 2 3 4 5 6036
0365037
0375038
0385039
039504
0405041
(a) Ω = 11
0 1 2 3 4 5 60
01
02
03
04
05
06
07
a
120591
1205773 = 0025
1205773 = 005
1205773 = 01
(b) Ω = 13
Figure 12 Effect of the time delay 120591 on the stability of vibration amplitude for the controlled systemwith different feedback gain 1205773 (1205771 = 00251198911 = 005 119896 = 1 and
120582 = 04)
4 13 Subharmonic Resonance
Since there exist cubic nonlinear terms in the controlledsystem when the excitation force amplitude increases to alarger value 13 subharmonic resonance can occur whichresults in a worse isolation performance So 13 subharmonicresonance of the controlled system is studied in this section
For the case of 13 subharmonic resonance the excitationforce amplitude is larger it is assumed that
1205771 = 1205761205771
(32a)
1205773 = 1205761205773
(32b)
Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 13
120573 = 120576120573 (32c)
Ω2= 9 + 120576120590 (32d)
Then (7) can be rewritten as
11990910158401015840+ 2120576
12057711199091015840+ 2120576
120577311990910158403(119879 minus 120591) +
(Ω2minus 120576120590)
9
119909
+ 1205761205731199093= 1198911 cosΩ119879
(33)
Substituting (10) and (11) into (33) and equating the coef-ficients of the same power of 120576 the following equations canbe obtained
1198632
01199090 +
Ω2
9
1199090 = 1198911 cosΩ1198790(34a)
1198632
01199091 +
Ω2
9
1199091 = minus2119863011986311199090 minus 2120585111986301199090
minus 21205853 [11986301199090 (1198790 minus 120591)]
3minus
1205731199093
0+
120590
9
1199090
(34b)
The solution of (32a) can be written in the form
1199090 (1198790 1198791) = 119860 (1198791) 119890119895(Ω3)1198790
+ Λ119890119895Ω1198790
+ 119888119888 (35a)
119860 (1198791) =
1
2
119886 (1198791) 119890119895Φ(1198791)
(35b)
Λ = minus
91198911
16Ω2 (35c)
Substituting (35a) into (34b) and removing secular termsfrom (34b) require
minus 119895
2
3
Ω1198631119860 minus 119895
2
3
1205851Ω119860 minus 3
1205731198602119860 minus 3
120573119860
2
Λ
minus 6120573119860Λ2+
1
9
120590119860 minus 119895
2
9
1205773Ω31198602119860119890minus119895(Ω3)120591
minus 11989541205773Ω3119860Λ2119890minus119895(Ω3)120591
+ 119895
2
3
1205773Ω3119860
2
Λ119890minus119895(Ω3)120591
= 0
(36)
Substituting (35b) into (36) and separating the real andimaginary terms the following equations can be obtained
1198861015840=
1
Ω
(minusΩ1205771119886 minus
1
12
1205773Ω31198863 cos Ω
3
120591 minus 61205773Ω3Λ2119886 cos Ω
3
120591
+
9
4
120573Λ1198862 sin 3Φ +
1
2
1205773Ω3Λ1198862 cos(Ω
3
120591 + 3Φ))
(37a)
119886Φ1015840=
1
Ω
(minus
1
6
120590119886 +
9
8
1205731198863+ 9
120573119886Λ2+
1
12
1205773Ω31198863 sin Ω
3
120591
+ 61205773Ω3Λ2119886 sin Ω
3
120591 +
9
4
120573Λ1198862 cos 3Φ
minus
1
2
1205773Ω3Λ1198862 sin(Ω
3
120591 + 3Φ))
(37b)
Then the amplitude-frequency and phase-frequency rela-tionships of 13 subharmonic resonance using the originalstructural parameter can be given by
(1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591)
2
+ (
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591)
2
= (
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591)
2
+ (
1
2
1205773Ω3Λ119886 cos Ω
3
120591)
2
(38a)
tan 3Φ =
11986011198621 minus 11986021198622
11986011198622 + 11986021198621
(38b)
1198621 =
9
4
120573Λ119886 minus
1
2
1205773Ω3Λ119886 sin Ω
3
120591 (38c)
1198622 =
1
2
1205773Ω3Λ119886 cos Ω
3
120591 (38d)
1198601 = 1205771Ω +
1
12
1205773Ω31198862 cos Ω
3
120591 + 61205773Ω3Λ2 cos Ω
3
120591
(38e)
1198602 =
9 minus Ω2
6
+
9
8
1205731198862+ 9120573Λ
2+
1
12
1205773Ω31198862 sin Ω
3
120591
+ 61205773Ω3Λ2 sin Ω
3
120591
(38f)
Equation (38a) can be written as a polynomial functionin 119886 as
1198864minus 21199013119886
2+ 1199023 = 0 (39a)
1199013 = ((minus
3
8
1205772
3Ω6minus
243
32
1205732minus
69
8
1205731205773Ω3 sin Ω
3
120591)Λ2
+
1
72
1205773Ω5 sin Ω
3
120591 minus
1
12
12057711205773Ω4 cos Ω
3
120591
minus
1
8
1205773Ω3 sin Ω
3
120591 +
3
16
120573Ω2minus
27
16
120573)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39b)
1199023 = ((1205771Ω + 61205773Ω3Λ2 cos Ω
3
120591)
2
+(
3
2
+ 9120573Λ2+ 61205773Ω
3Λ2 sin Ω
3
120591 minus
Ω2
6
)
2
)
sdot (
1
144
1205772
3Ω6+
81
64
1205732+
3
16
1205731205773Ω3 sin Ω
3
120591)
minus1
(39c)
14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

14 Shock and Vibration
3 4 5 6 7 8 9 100
10
20
30
40
50
60
Ω
f1
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
3 4 5 6 7 8 9 1065707580859095
100105110115
Ω
UncontrolledControlled 1205773 = 001
Controlled 1205773 = 0025
Controlled 1205773 = 005
Φ
Figure 13 Existence regions amplitude-frequency and phase-frequency relationships of the 13 subharmonic resonance for the controlledsystem under different feedback gain 120577
3without time delay (120577
1= 0025 119896 = 1 120582 = 04 and 119891
1= 2)
It can be seen from (39a) that there exists amplitude for agiven frequency if 1199013 gt 0 and 119901
2
3ge 1199023 since 1199023 gt 0 Sub-
stituting ((39b)-(39c)) into these inequalities the existencecondition of the 13 subharmonic resonance can be obtained
From (38a)ndash(38f) and (39a)ndash(39c) it can be seen thatthe amplitude-frequency phase-frequency relationships andexistence regions of the 13 subharmonic resonance for thecontrolled system are greatly influenced by the nondimen-sional feedback gain 1205773 and time delay 120591 when the otherstructural parameters are taking the same values as in the pri-mary resonance partThe effect of the feedback gain 1205773 on the13 subharmonic resonance of the controlled system withouttime delay can be clearly seen in Figure 13When the system isuncontrolled the existence regions and amplitude of the 13subharmonic resonance are relatively large When the feed-back gain 1205773 increases the existence regions of the 13 subhar-monic resonance decrease rapidly So by choosing appreciatevalue of feedback gain 1205773 the 13 subharmonic resonance ofthe controlled system without time delay can be avoided
The effect of the time delay 120591 on the 13 subharmonicresonance of the controlled system can be seen in Figure 14Compared to the uncontrolled system the existence regionsof the 13 subharmonic resonance for the controlled systemwith time delay can also become smaller but are larger thanthe controlled system without time delay Because whentime delay exists the trigonometric functions appear in both
the amplitude-frequency function and existence region func-tion and cannot be eliminated which can be clearly seenin (37a) and (37b) and (38a)ndash(38f) So there exist multipleexistence regions for the 13 subharmonic resonance theexistence regions for larger frequency are not shown inFigure 14 for simplicity When the time delay exists inthe controlled system the 13 subharmonic resonance canoccur for a smaller excitation force amplitude and increasingthe feedback gain cannot eliminate the 13 subharmonicresonance which is undesirable in practical engineering Soin themeaning of controlling 13 subharmonic resonance thecontrolled system without time delay is better
The stability analysis of the 13 subharmonic resonancefor the controlled system can be investigated as the primaryresonance case so it is no longer described here It canbe proven that the upper branch of the 13 subharmonicresonance is asymptotically stable while the lower branch isunstable
5 Force Transmissibility
Force transmissibility is an important index to describe theperformance of the vibration isolator It is defined as the ratiobetween the force transmitted to the base and the excitationforce In this section force transmissibility is investigated toevaluate the performance of the controlled HSLDS vibration
Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 15
3 35 4 45 5 55 6 65 7 75 805
101520253035404550
f1
Ω
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(a) 120591 = 1205874
3 4 5 6 7 8 9 100
05
1
15
2
25
3
a
Ω
3 4 5 6 7 8 9 10 110
50
100
150
f1
Ω
(b) 120591 = 21205874
UncontrolledControlled
3 4 5 6 7 8 9 10 110
102030405060708090
100
f1
Ω
UncontrolledControlled
3 35 4 45 5 55 6 65 7 75 80
02040608
112141618
a
Ω
(c) 120591 = 31205874
Figure 14 Existence regions and amplitude-frequency relationships of the 13 subharmonic resonance for the controlled systemwith differenttime delay 120591 (1205771 = 0025 1205773 = 0025 119896 = 1 120582 = 04 and 1198911 = 2)
isolator and compared with an equivalent linear passivevibration isolator The nondimensional force transmitted tothe base through the controlled HSLDS vibration isolator isdefined as the following form
119891119905 = 212057711199091015840+ 21205773119909
10158403(119879 minus 120591) + 119909 +
1205731199093 (40)
Using (13a) and (13b) the nondimensional force isobtained as
119891119905 = ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
(41)
The force transmissibility of the controlled system can beexpressed as
119879NF =
119891119905
1198911
= ((21205771Ω119886 +
3
2
1205773Ω31198863 cosΩ120591)
2
+ (119886 +
3
4
1205731198863+
3
2
1205773Ω31198863 sinΩ120591)
2
)
12
sdot (1198911)minus1
(42)
16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

16 Shock and Vibration
0 05 1 15 2 25 3
010203040
1205771 = 0025
1205771 = 005
1205771 = 01
1205771 = 015
minus10
minus20
minus30
minus40
Ωl
TN
F(d
B)
Figure 15 Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 (1198911 = 005 119896 = 1 and
120582 = 04)
It is also of interest to compare the force transmissibilityof the controlled system with an equivalent linear one withthe same load bearing capacity The force transmissibility ofthe equivalent linear vibration isolator is given as
119879LF = radic
1 + 41205772
119897Ω2
119897
(1 minus Ω2
119897)2+ 41205772
119897Ω2
119897
(43)
where 120585119897 Ω119897 are the damping ratio and frequency ratio ofthe equivalent linear vibration isolator respectively Sincethe HSLDS vibration isolator is comprised of load bearingelement and stiffness correctors the equivalent linear oneis the HSLDS vibration isolator with the stiffness correctorsremoved then 120585119897 and Ω119897 should satisfy the following condi-tions
120577119897 =radic1205721205771 (44a)
Ω119897 =
Ω
radic120572
(44b)
For the sake of consistency when plotting the forcetransmissibility of the controlled system and an equivalentlinear one on the same figure the values on the frequencyaxis have to comply with (44b) The force transmissibilityof these two vibration isolators is expressed in dB scale as20 log 10(119879NF) and 20 log 10(119879LF) respectively As can be seenin (42) the force transmissibility of the controlled system isgreatly influenced by the nondimensional damping ratio 1205771feedback gain 1205773 and time delay 120591 when the other structuralparameters are chosen The following discussion investigatesthe effects of these parameters on the force transmissibility
Force transmissibility of the uncontrolled system withdifferent damping ratio 1205771 is shown in Figure 15 the forcetransmissibility of the equivalent linear one is also plottedin the same figure for comparison From Figure 15 it canbe seen that when the damping ratio is smaller the jumpphenomenon occurs and the smaller the damping ratio isthe larger the force transmissibility curve bends to the rightthen the HSLDS vibration isolator can lead to an undesirable
02 04 06 08 1 12 14 16
0
10
20
30
40
Uncontrolled
minus10
minus20
minus30
Ωl
TN
F(d
B)
Controlled 1205773 = 005
Controlled 1205773 = 01
Controlled 1205773 = 05
Figure 16 Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay (1205771 = 0025 1198911 = 005119896 = 1 and
120582 = 04)
isolation performance compared to the linear one Whenthe damping ratio increases it can significantly reduce thevibration amplitude around the resonance frequency regionand the isolation frequency band is larger than the linearone then the performance of the HSLDS vibration isolator issuperior to the linear one but it results in a poor performancein the high frequency band where the isolation is required
Force transmissibility of the controlled system underdifferent feedback gain 1205773 without time delay is shown in Fig-ure 16The effect of feedback gain 1205773 on the force transmissibil-ity can be clearly seen in this figure When the feedback gain1205773 increases the vibration amplitude around the resonancefrequency region decreases the jump phenomenon can beeliminated and can achieve a better isolation performancein the high frequency band where the isolation is requiredThus the cubic velocity feedback control strategy can solvethe dilemma existing in the passive vibration isolators withlinear damping
Force transmissibility of the controlled system with dif-ferent time delay 120591 is shown in Figure 17 The effect of timedelay 120591 on the force transmissibility can also be interpretedby the equivalent damping ratio and equivalent resonancefrequency Then the force transmissibility of the controlledsystem can be obtained as
119879NF =
119891119905
1198911
=
(radic(2120577eqΩ119886)
2
+ (1198861199082eq)2
)
1198911
(45)
The time delay 120591 can influence the peak amplitude andresonance frequency of the force transmissibility just as theprimary resonance case which can achieve a better or poorerisolation performance than the uncontrolled system so it isno longer described in detail here Another important featurethat should be addressed is that the time delay 120591 does notinfluence the isolation performance in the high frequencyband where the isolation is required
Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 17
06 08 1 12 14 16 18 2 22
05
101520253035
TN
F(d
B)
minus15
minus10
minus5
Ω
Uncontrolled120591 = 0
120591 = 1205874
120591 = 1205872
120591 = 31205874
Figure 17 Force transmissibility of the controlled system withdifferent time delay 120591 (1205771 = 0025 1205773 = 0025 1198911 = 005 119896 = 1and
120582 = 04)
6 Conclusion
This paper proposes the time-delayed cubic velocity feedbackcontrol strategy to improve the isolation performance ofHSLDS vibration isolator Both the resonance and per-formance of the controlled HSLDS vibration isolator areconsidered The primary resonance of the controlled systemis obtained by using the multiple scales method The equiv-alent damping ratio and equivalent resonance frequency aredefined to study the effects of feedback gain 1205773 and time delay120591 on the primary resonance When time delay 120591 = 0 withthe increase of feedback gain 1205773 the equivalent damping ratiobecomes larger the peak amplitude of the primary resonancedecreases and is smaller than the uncontrolled systemWhentime delay 120591 exists in the controlled system the equivalentdamping ratio and equivalent resonance frequency can beconsidered as the periodic functions of time delay 120591 the peakamplitude of the primary resonance can be smaller or largerthan the uncontrolled system based on the value of time delay120591 A closed-loop response curve is found above the primaryresonance becausemultiple solutions exist in these frequencybands when time delay 120591 takes some special values
The jump phenomenon analysis of the controlled systemis then investigated When time delay 120591 = 0 it is convenientto use the method of Sylvester resultant to determine thecritical surface of the structural parameters which lead tono jump phenomenon and the jump frequencies whenjump phenomenon occurs When time delay 120591 exists in thecontrolled system the method of Sylvester resultant cannotbe used because the trigonometric functions exist in theamplitude-frequency function of the primary resonance thecritical boundary which leads to no jump phenomenon andjump frequencies can be obtained by using the optimizationmethod but is more complicated The stability analysis ofthe controlled system is also considered it is found thatthe stability boundary of the primary resonance is greatlyinfluenced by the feedback gain 1205773 and time delay 120591
The 13 subharmonic resonance of the controlled systemis studied by using the multiple scales method When time
delay 120591 = 0 with the increase of feedback gain 1205773 theexistence regions of the 13 subharmonic resonance decreaserapidly and the 13 subharmonic resonance can be avoidedby choosing appreciate value of feedback gain 1205773 When timedelay 120591 exists in the controlled system the 13 subharmonicresonance can occur for a smaller excitation force amplitudeand increasing the feedback gain cannot eliminate the 13subharmonic resonance So in the meaning of controlling 13subharmonic resonance the controlled system without timedelay is better
Last the force transmissibility of the controlled systemis considered When the feedback gain 1205773 increases thevibration amplitude around the resonance frequency regiondecreases and the isolation frequency band is larger whichis superior to the equivalent linear passive vibration isolatorIt can also achieve a better isolation performance in thehigh frequency band where the isolation is required Thusthe cubic velocity feedback control strategy can solve thedilemma existing in the passive vibration isolators with lineardamping
Appendix
Consider
1198870 = minus
256
27
1205772
11205772
31205732minus
4096
27
1205775
11205773
3120573 +
1024
9
1205773
11205773
3120573 minus
1024
27
1205772
11205774
3
1198872 = minus
32
3
1205772
11205772
31205733+ (
1024
9
1205772
1minus
512
3
1205774
1minus
64
3
) 12057711205773
31205732
+ (minus
2048
9
1205774
1minus
512
3
1205772
1+
640
3
) 1205772
11205774
3120573
minus (
512
9
1205772
1+
256
3
) 12057711205775
3
1198874 = 1205772
31205734minus 641205771120577
3
31205733+ (minus256120577
6
1minus 640120577
4
1+ 624120577
2
1minus 8) 120577
4
31205732
minus (64 + 2561205772
1) 12057711205775
3120573 minus 48120577
6
3
1198876 = minus3012057711205773
31205734+ (minus480120577
4
1+ 360120577
2
1minus 54) 120577
4
31205733
+ (minus8641205772
1+ 528) 1205771120577
5
31205732minus 216120577
6
3120573
1198878 = minus811205774
31205734+ (minus1296120577
2
1+ 972) 1205771120577
5
31205733minus 324120577
6
31205732
11988710 = minus
81
2
1205774
31205735+ (minus648120577
2
1+ 486) 1205771120577
5
31205734minus 162120577
6
31205733
1198871 = 1198873 = 1198875 = 1198877 = 1198879 = 0
1198880 = 1198914
1
1198882 = 27120577112057731198914
1
1198884 = (1351205772
1+
81
2
) 1205772
31198914
1
+ (9612057731205774
1minus 961205773120577
2
1+ 61205731205771 + 121205773) 1205771119891
2
1
18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

18 Shock and Vibration
1198886 = minus
2187
32
1205774
31198916
1+ (minus541205773120577
3
1+ 24312057731205771 +
729
16
120573) 1205772
31198914
1
+ ((1441205774
1minus 270120577
2
1+ 9) 120577
2
3
+ (minus541205731205773
1+ 721205731205771) 1205773 minus
9
4
1205732)1198912
1
1198888 = (
2187
16
1205773 +
729
4
1205771120573) 1205773
31198914
1
+ ((541205773
1minus 2431205771) 120577
2
3
+ (1081205731205774
1minus 189120573120577
2
1+
567
8
120573) 1205773 + 2712057711205732) 12057731198912
1
+ 14412057312057731205775
1minus 1081205731205773120577
3
1+ (9120573
2+ 361205772
3) 1205772
1
11988810 =
6561
64
1205731205774
31198914
1+ (minus
729
8
1205772
3minus
1701
8
12057312057711205773 +
1215
16
1205732) 1205772
31198912
1
+ 5412057711205773
3+ (216120577
2
1minus 135) 120573120577
2
11205772
3
+ (1081205774
1minus 811205772
1+
27
2
) 120573212057711205773 +
27
4
12057331205772
1
11988812 = (minus
2187
16
1205772
3+ (minus
243
8
1205772
1+
729
16
) 12057312057711205773 +
3159
128
1205732)1205731205772
31198912
1
+
81
4
1205774
3+ (81120577
2
1+
81
4
) 12057312057711205773
3
+ (3241205774
1minus 243120577
2
1+
81
16
) 12057321205772
3+
81
4
120573312057711205773
11988814 = (minus1205773 + 1205731205771)
6561
128
12057321205773
31198912
1+
729
16
1205731205774
3
+
243
32
120573412057711205773 + (
729
4
1205772
1minus
1701
16
) 120573212057711205773
3
+ (
243
2
1205774
1minus
729
8
1205772
1+
729
64
) 12057331205772
3
11988816 =
2187
64
12057321205774
3+ (
2187
16
1205772
1minus
6561
64
) 120573312057711205773
3+
2187
256
12057341205772
3
11988818 =
2187
256
12057331205774
3+ (
2187
64
1205772
1minus
6561
256
) 120573412057711205773
3+
2187
1024
12057351205772
3
1198881 = 1198883 = 1198885 = 1198887 = 1198889 = 11988811 = 11988813 = 11988815 = 11988817 = 0
(A1)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by Funding of Jiangsu InnovationProgram forGraduate Education (Grant no KYLX 0243) and
the Fundamental Research Funds for the Central Universi-ties It is also supported by the basic research of Nanjing Uni-versity of Aeronautics andAstronautics Business Inte-grationof Science and Engineering Project funds (NZ2015103)
References
[1] P Alabuzhev A Gritchin L Kim G Migirenko V Chon andP Stepanov Vibration Protecting and Measuring Systems withQuasi-Zero Stiffness Hemisphere Publishing New York NYUSA 1989
[2] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[3] A Carrella M J Brennan and T P Waters ldquoStatic analysis of apassive vibration isolator with quasi-zero-stiffness characteris-ticrdquo Journal of Sound and Vibration vol 301 no 3ndash5 pp 678ndash689 2007
[4] I Kovacic M J Brennan and T PWaters ldquoA study of a nonlin-ear vibration isolator with a quasi-zero stiffness characteristicrdquoJournal of Sound andVibration vol 315 no 3 pp 700ndash711 2008
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Y Wang S M Li J Y Li X X Jiang and C Cheng ldquoResponseand performance of a nonlinear vibration isolator with high-static-low-dynamic-stiffness under shock excitationsrdquo Journalof Vibroengineering vol 16 no 7 pp 3382ndash3398 2014
[7] T D Le and K K Ahn ldquoA vibration isolation system in lowfrequency excitation region using negative stiffness structurefor vehicle seatrdquo Journal of Sound and Vibration vol 330 no26 pp 6311ndash6335 2011
[8] W S Robertson M R F Kidner B S Cazzolato and AC Zander ldquoTheoretical design parameters for a quasi-zerostiffness magnetic spring for vibration isolationrdquo Journal ofSound and Vibration vol 326 no 1-2 pp 88ndash103 2009
[9] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[10] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[11] K Shin ldquoExperimental investigation of the vibration transmis-sibility of a magnet-spring vibration isolator under randomexcitationrdquo Journal of Vibroengineering vol 16 no 4 pp 1745ndash1752 2014
[12] X Liu XHuang andHHua ldquoOn the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negativestiffness correctorrdquo Journal of Sound and Vibration vol 332 no14 pp 3359ndash3376 2013
[13] X C Huang X T Liu J Y Sun Z Y Zhang and H X HualdquoEffect of the system imperfections on the dynamic response ofa high-static-low-dynamic stiffness vibration isolatorrdquo Nonlin-ear Dynamics vol 76 no 2 pp 1157ndash1167 2014
[14] A D Shaw S A Neild and D J Wagg ldquoDynamic analysis ofhigh static low dynamic stiffness vibration isolation mountsrdquoJournal of Sound and Vibration vol 332 no 6 pp 1437ndash14552013
Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 19
[15] A D Shaw S A Neild D J Wagg P M Weaver andA Carrella ldquoA nonlinear spring mechanism incorporating abistable composite plate for vibration isolationrdquo Journal ofSound and Vibration vol 332 no 24 pp 6265ndash6275 2013
[16] H Y Hu E H Dowell and L N Virgin ldquoResonances of a har-monically forced Duffing oscillator with time delay state feed-backrdquo Nonlinear Dynamics vol 15 no 4 pp 311ndash327 1998
[17] J C Ji ldquoLocal bifurcation control of a forced single-degree-of-freedom nonlinear system saddle-node bifurcationrdquoNonlinearDynamics vol 25 no 4 pp 369ndash382 2001
[18] J C Ji and A Y T Leung ldquoResonances of a non-linear sdofsystemwith two time-delays in linear feedback controlrdquo Journalof Sound and Vibration vol 253 no 5 pp 985ndash1000 2002
[19] Y J Shen andM Ahmadian ldquoNonlinear dynamical analysis onfour semi-active dynamic vibration absorbers with time delayrdquoShock and Vibration vol 20 no 4 pp 649ndash663 2013
[20] R Rusinek A Weremczuk K Kecik and J WarminskildquoDynamics of a time delayed duffing oscillatorrdquo InternationalJournal of Non-Linear Mechanics vol 65 pp 98ndash106 2014
[21] X Sun J Xu X Jing and L Cheng ldquoBeneficial performance of aquasi-zero-stiffness vibration isolator with time-delayed activecontrolrdquo International Journal of Mechanical Sciences vol 82no 1 pp 32ndash40 2014
[22] A H Nayfeh and D T Mook Nonlinear Oscillations WileyNew York NY USA 1979
[23] A Narimani M F Golnaraghi and G N Jazar ldquoSensitivityanalysis of the frequency response of a piecewise linear systemin a frequency islandrdquo Journal of Vibration and Control vol 10no 2 pp 175ndash198 2004
[24] PMalatkar andAHNayfeh ldquoCalculation of the jump frequen-cies in the response of sdof non-linear systemsrdquo Journal ofSound and Vibration vol 254 no 5 pp 1005ndash1011 2002
[25] C E Wee and R N Goldman ldquoElimination and resultantsmdashpart 1 elimination and bivariate resultantsrdquo IEEE ComputerGraphics and Applications vol 15 no 1 pp 69ndash77 1995
[26] L W Griffiths Introduction to the Theory of Equations WileyNew York NY USA 1947
[27] G N Jazar R Houim A Narimani and M F GolnaraghildquoFrequency response and jump avoidance in a nonlinear passiveengine mountrdquo Journal of Vibration and Control vol 12 no 11pp 1205ndash1237 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of