Embed Size (px)
Citation preview

Research ArticleDiscrete-Time Optimal Control of Photovoltaic Grid-ConnectedInverter Based on Particle Swarm Optimization
Xinrui Liu,1 Guangru Zhang,1,2 Dongsheng Yang,1 Tongyu Shi,1 and Xusheng He3
1 The College of Information Science and Engineering, Northeastern University, Shenyang 110819, China2 Electric Power Research Institute, State Grid Gansu Electric Power Company, Lanzhou 730050, China3 State Grid Shenyang Electric Power Supply Company, Shenyang 110004, China
Correspondence should be addressed to Dongsheng Yang; [email protected]
Received 12 March 2014; Accepted 28 April 2014; Published 20 May 2014
Academic Editor: Yan-Jun Liu
Copyright © 2014 Xinrui Liu et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper is concerned with the problem of optimal control of photovoltaic grid-connected inverter. Firstly, the discrete-time nonlinear mathematical model of single-phase photovoltaic grid-connected inverter in the rotating coordinate system isconstructed by the Delta operator, which simplifies the control process and facilitates direct digital realization. Then, a noveloptimal control method which is significant to achieve trajectory tracking for photovoltaic grid-connected inverter is developedby constructing a control Lyapunov functional against the difficulty of solving HJB (Hamilton-Jacobi-Bellman) partial differentialequations. More importantly, the performance matrix of the controller which is very meaningful to many performance indicatorsof the system is also optimized via the particle swarm optimization. Finally, two numerical examples are provided to illustrate theeffectiveness of the proposed method.
1. Introduction
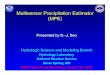
Energy is the basic material for survival and developmentof human, and it is also the blood of the world economy.Along with the development of society and economy andthe improving of living standards, the demand for energy isincreasingly urgent. In expected future, more than 60% of theworldwide energy will be indirectly consumed by conversioninto electrical energy and thus it is urgent to take advantage ofthe new decentralized energy generation to meet the increas-ing demand for electricity [1, 2]. Considering many factors ofthe energy supply, solar energy is undoubtedly the ideal ofsustainable development and green energy. Figure 1 shows atypical single-phase photovoltaic grid-connected system.Thecontrol of the system is composed by the boost chopper cir-cuit and single-phase inverter. Boost chopper circuit ismainlyto ensure photovoltaic modules running in MPPT (max-imum power point tracking) point [3–7].
In order to ensure control accuracy and obtain high-quality sine wave of the inverter output current which has thesame frequency and phase with the grid voltage, experts and
scholars have put forward many methods, such as the tradi-tional PID control, dual-loop control, and hysteresis control.And repetitive control, proportional resonance control, andslidingmode control have also been proposed in recent years.Traditional methods [8–11] used to control the system are rel-atively simple and easy to adjust controller parameters, andtheir stability can be guaranteed and they have mature appli-cation, but it is difficult to adjust parameters of the system andeliminate static error and control accuracy is not high. In aword, the overall effect is not satisfactory. As the nonlinearcharacteristics of electronic devices and photovoltaic mod-ules, it is difficult to obtain improved results by linear approx-imation using traditional methods to implement the controlof the system, and these methods are more suitable for thesystem which can precisely obtain the steady-state point andalways has small perturbations [12].Therefore, it is essential toresearch nonlinear control methods for grid-connected pho-tovoltaic inverter in order to obtain high-quality grid-con-nected inverter output current. In [13], it combines the par-allel PI with repetitive control which solves the problem ofphase lagging, but the improvement is limited and dynamic
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014, Article ID 249312, 10 pageshttp://dx.doi.org/10.1155/2014/249312

2 Mathematical Problems in Engineering
u
uu
uLg Rg
igc
Cdc
UdcUpv
Ipv
Cin
PVstring
MPPT
DC-DC
Voltagesensor
Optimal controller
PWM
Current sensor
Voltage sensorGrid
eg
Figure 1: Single-phase photovoltaic grid-connected system.
response can still be improved. In [14], using a Lyapunovfunctional to design the nonlinear controller for invertershas global stability, and its static and dynamic response geta better improvement, but its implementation is difficult andcalculations are very complex. Sliding mode control havingstrong robustness and stability in a wide margin has beenproved in [15, 16], but it cannot eliminate the steady-stateerror and also has oscillation problem. Optimal nonlinearcontrolmethod using the power converter has been proposedin [17–19], and it has proved that the method can operatein a stable way in a wide fluctuating range and has strongrobustness. Moreover, [17–20] also point out that the optimalcontrol is more suitable for trajectory tracking problem,which also proves its stability and effectiveness, and [21, 22]also focus on the optimal control and prove that this methodhas good performance. Photovoltaic grid-connected inverteralso can be considered in the current trajectory trackingproblem, and using the optimal control can significantlyimprove performances of the system.
However, it is worth noting that optimization problemgenerally solves the Hamilton-Jacobi-Bellman partial differ-ential equations, which are usually difficult to solve. On theother hand, it is pointed out in [23, 24] that constructing aLyapunov functional in the form of inverse optimality couldovercome the shortcomings of optimal control. So far, due tothe complexity of mathematical analysis, there has been lesswork on optimal control of photovoltaic grid-connected in-verter. Therefore, this problem needs to be further investi-gated.
In this paper, the problem of optimal control for pho-tovoltaic grid-connected inverter is addressed. Firstly, thediscrete-time nonlinear mathematical model of single-phasephotovoltaic grid-connected inverter in the rotating coordi-nate system is constructed by the Delta operator in Section 2,which simplifies the control process and facilitates directdigital realization. Then, a novel optimal control method forphotovoltaic grid-connected inverter is given by constructinga control Lyapunov functional, and the optimization methodfor the performance matrix of the controller is also proposedin Section 3. Lastly, simulations are given to verify the aboveproposed method in Section 4.
2. Single-Phase Photovoltatic Grid-ConnectedInverter Model
2.1. Transformation to Rotating Frame of Single Phase. Manyparameters of power converters are AC variables whichmakethe analysis of the system and the controller designer complexand cumbersome. Therefore, the introduction of the rotatingcoordinate system has an important value to simplify the var-iables. 𝑑− 𝑞 rotating coordinate transformation is commonlyused in the analysis and controller design of three-phase in-verter. Shortcutting creatingmodels of inverters and convert-ers and all time-varying state variables of the topology havebecome constants, so that the analysis and design of the con-troller changes become even simpler [25]. Since 𝑑 − 𝑞 trans-formation requires at least two orthogonal phases, it is notuseful for the single-phase inverter directly [26]. To constructa 𝑑 − 𝑞 rotating coordinate system of single-phase inverter, avirtual signal corresponding to the original signal is built togenerate two orthogonal phase signals.
Assume the actual steady-state variable is
𝑋𝑅= 𝑋𝑚sin (𝜔𝑡 + 𝜑) , (1)
where𝑋𝑚is the peak value of the variable,𝜔 is the fundamen-
tal frequency, and 𝜑 is the initial phase of the sine variable. Inideal condition, the corresponding virtual orthogonal vari-able is
𝑋𝐼= 𝑋𝑚cos (𝜔𝑡 + 𝜑) . (2)
Transformation matrix from two-phase stationary coor-dinate to two-phase rotating coordinate can be obtained byusing
𝑇 = [sin (𝜔𝑡) cos (𝜔𝑡)cos (𝜔𝑡) − sin (𝜔𝑡)] . (3)
The variable in the 𝑑−𝑞 rotating coordinate system can beexpressed as
[𝑋𝐷
𝑋𝑄
] = 𝑇[𝑋𝑅
𝑋𝐼
] = 𝑋𝑚[cos𝜑sin𝜑] . (4)

Mathematical Problems in Engineering 3
𝛽
d
q
𝛼𝜑
udi𝛼
i𝛼
𝛽 = idq
u𝛼𝛽 = udq
id
iq
i𝛽
u𝛽 = ud𝛽 = udsin 𝜑i d𝛽=i d
sin 𝜑
i q𝛽=i q
cos 𝜑
iq𝛼 = −iqsin 𝜑 id𝛼 = idcos 𝜑
u𝛼 = ud𝛼 = udcos 𝜑
Figure 2: Phasor diagram of 𝑑 − 𝑞 coordinate.
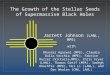
Figure 2 illustrates the entire building process from a sta-tionary coordinate system to a rotating coordinate system.The time-varying variables of single-phase photovoltaic grid-connected inverter are mainly inverter output current andgrid voltage. So the transformation of current and voltage areconstructed in Figure 2, where 𝑢
𝛼represents the actual grid
voltage and 𝑢𝛽represents the corresponding virtual orthogo-
nal grid voltage; 𝑖𝛼represents the actual inverter output cur-
rent and 𝑖𝛽represents the corresponding virtual orthogonal
inverter output current; 𝑢𝛼𝛽
represents the grid voltage and𝑖𝛼𝛽
represents the inverter output current; 𝑢𝑑represents the
grid voltage in 𝑑 axis and 𝑢𝑞represents the grid voltage in 𝑞
axis; 𝑖𝑑represents the inverter output current in 𝑑 axis and
𝑖𝑞represents the inverter output current in 𝑞 axis. Figure 2
clearly shows that the time-varying variables of the inverterbecome constant variables, so that the analysis and design ofthe controller are simplified subsequently.
2.2. The Mathematical Model of Single-Phase Grid-ConnectedInverter. Figure 1 shows a typical single-phase photovoltaicgrid-connected inverter structure. From it, the mathematicalmodel can be obtained as follows:
��dc (𝑡) =1
𝐶𝑈dc (𝑡)𝑢𝑇
𝑔(𝑡)𝑀𝑃𝑖𝑔 (𝑡) ,
𝑖𝑔 (𝑡) = −𝐴
𝑈dc (𝑡)
𝐿𝑔
−𝑅𝑔
𝐿𝑔
𝑖𝑔 (𝑡) + 2
𝑈dc (𝑡)
𝐿𝑔
𝑢 (𝑡) −𝑢𝑔 (𝑡)
𝐿𝑔
,
(5)
where 𝑢𝑔= [𝑢𝑔𝑑
𝑢𝑔𝑞], 𝑖𝑔= [𝑖𝑔𝑑
𝑖𝑔𝑞], 𝑢 = [ 𝑢𝑑𝑢𝑞 ],𝐴 = [ 10 ],𝑀𝑃 = [ 1 00 1 ],
and𝑈dc isDCbus voltage,𝐶 is capacitor ofDCbus,𝐿𝑔is grid-
connected filtering inductance, 𝑅𝑔is equivalent resistance of
grid-connected filtering inductance,𝑢𝑔𝑑and𝑢𝑔𝑞are grid volt-
age in 𝑑 axis and 𝑞 axis, respectively, 𝑖𝑔𝑑
and 𝑖𝑔𝑞
are inverteroutput current in 𝑑 axis and 𝑞 axis, respectively, and 𝑢
𝑑and
𝑢𝑞are the duty in 𝑑 axis and 𝑞 axis, respectively.Thanks to the low-cost microprocessor which is the main
tool to implement the control method and requires the dis-crete samples for the signal processing normally, it is neces-sary to construct discrete-time model of the inverter whichcan realize the control strategy directly. Traditional shift oper-ator is the main method to discretize continuous systems.When the sampling frequency of the discrete-time systemincreases, the traditional method is difficult to avoid the
shortcomings of the following [27]. With the sampling fre-quency increasing, parameters of the discrete model are notinequivalent to the parameters of the corresponding con-tinuous system, and when the relative degree of continuoussystem is greater than 1, some zero-polo will tend to the unitcircle or go outside of the unit circle; on the other hand, theincreasing sampling frequency will lead to the oscillation ofthe limit cycle and instability of the system. Therefore, whenthe sampling period is small, the traditional shift operator torealize discretization of systemswill result in all poles locatingon the boundary of stability for sampling systems and thestability will deteriotate. Control expert, Goodwin, proposesthat Delta operator (incremental difference operator, oftencalled 𝛿 operator) is a better method to discretize continuoussystems [28, 29], and this method can make it close to theoriginal continuous model in the fast sampling case andmaintains the original kinetic properties. In this paper, 𝛿operator is used to achieve the discrete-time mathematicalmodel of the system.𝛿 operator (incremental difference operator) is defined as
𝛿 (𝑇) =
{{{
{{{
{
𝑑𝑋 (𝑡)
𝑑𝑡, (𝑇 = 0) ,
𝑋 (𝑡 + 𝑇) − 𝑋 (𝑡)
𝑇, (𝑇 = 0) ,
(6)
where 𝑇 is sampling period of the system. When 𝑇 = 0, thesystem is continuous; when 𝑇 = 0, the system is discrete.
In order to design a discrete controller for digital imple-mentation directly, the state space model can be obtained bythe 𝛿 operator as follows:
𝑈dc (𝑘 + 1) = 𝑈dc (𝑘) + 𝜏 [1
𝐶𝑈dc (𝑘)𝑢𝑇
𝑔(𝑘)𝑀𝑃𝑖𝑔 (𝑘)] ,
𝑖𝑔 (𝑘 + 1) = 𝑖𝑔 (𝑘) + 𝜏 [−𝐴
𝑈dc (𝑘)
𝐿𝑔
−𝑅𝑔
𝐿𝑔
𝑖𝑔 (𝑘)
+2𝑈dc (𝑘)
𝐿𝑔
𝑢 (𝑘) −𝑢𝑔 (𝑘)
𝐿𝑔
] ,
(7)
where 𝜏 is period of sample time. Obviously, the system ma-trix is with a nonlinear term. In Section 3, optimal controlwill be developed to deal with the output tracking problem ofa general nonlinear system including (7).
3. Controller Design
3.1.Mathematical Preliminaries of Optimal Control. From (7),the system can be considered as a nonlinear discrete-timeaffine system naturally.Therefore, optimal control commonlyused in the discrete-time affine system can be used in the sys-tem. To understand the optimal control better, a brief discus-sion will be given in this section.
Now, consider a typical nonlinear discrete-time affine sys-tem [30–33] as follows:
𝑥𝑘+1= 𝑓 (𝑥
𝑘) + 𝑔 (𝑥
𝑘) 𝑢𝑘, 𝑦
𝑘= ℎ (𝑥
𝑘) ,
𝑥0= 𝑥 (0) .
(8)

4 Mathematical Problems in Engineering
Along with the associated meaningful cost functional [34],
𝑉 (𝑥𝑘) =
∞
∑
𝑛=𝑘
𝑙 (𝑥𝑛) + 𝑢𝑇
𝑛𝑅 (𝑥𝑛) 𝑢𝑛, (9)
where 𝑥𝑘∈ R𝑛 is the state of the system at time 𝑘 ∈ N+ = {0,
1, 2, . . .}; 𝑢𝑘∈ R𝑚 is the input of the control; 𝑓(𝑥
𝑘) : R𝑛 →
R𝑛, 𝑔(𝑥𝑘) : R𝑛 → R𝑛×𝑚, and ℎ(𝑥
𝑘) : R𝑛 → R𝑛 are smooth
mappings; 𝑓(0) = 0 and 𝑔(𝑥𝑘) = 0 for all 𝑥
𝑘= 0; 𝑉 : R𝑛 →
R+; 𝑙 : R𝑛 → R
+is a positive semidefinite function (a
function 𝑙(𝑥) is a positive semidefinite function if, for all vec-tors, 𝑙(𝑥) ≥ 0; namely, there exist some vectors 𝑥 for which𝑙(𝑥) = 0 and for all others 𝑥, 𝑙(𝑥) > 0 [35]) and 𝑅 : R𝑛 →R𝑚×𝑚 is a real symmetric positive definite weighting matrix.In the section, we assume that all the states are measurableand available.
And (9) can be transformed into
𝑉 (𝑥𝑘) = 𝑙 (𝑥
𝑘) + 𝑢𝑇
𝑘𝑅 (𝑥𝑘) 𝑢𝑘
+
∞
∑
𝑛=𝑘+1
(𝑙 (𝑥𝑛) + 𝑢𝑇
𝑛𝑅 (𝑥𝑛) 𝑢𝑛)
= 𝑙 (𝑥𝑘) + 𝑢𝑇
𝑘𝑅 (𝑥𝑘) 𝑢𝑘+ 𝑉 (𝑥
𝑘+1) ,
(10)
where𝑉(0) = 0 is required as the boundary condition.There-fore, 𝑉(𝑥
𝑘) becomes a Lyapunov functional.
Based on Bellman’s optimality principle, the cost func-tional 𝑉(𝑥
𝑘) becomes invariant and satisfies the discrete-
time Hamiltonian for the infinite horizon optimization case[34, 36], and it becomes
𝑉 (𝑥𝑘) = min {𝑙 (𝑥
𝑘) + 𝑢𝑇
𝑘𝑅 (𝑥𝑘) 𝑢𝑘+ 𝑉 (𝑥
𝑘+1)} . (11)
In order to obtain the control law of the system, (11) istransformed into
Z (𝑥𝑘, 𝑢𝑘) = 𝑙 (𝑥
𝑘) + 𝑢𝑇
𝑘𝑅 (𝑥𝑘) 𝑢𝑘+ 𝑉 (𝑥
𝑘+1) − 𝑉 (𝑥
𝑘) . (12)
The necessary condition to the optimal control law is
𝜕Z (𝑥𝑘, 𝑢𝑘)
𝜕𝑢𝑘
= 0. (13)
Combing (12) and (13), the determination of optimalcontrol is corresponding to calculating the gradient of theright side of (12); then
2𝑅 (𝑥𝑘) 𝑢𝑘+𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑢𝑘
= 0. (14)
Taking the derivative of (8) and substituting it into (14)yield
2𝑅 (𝑥𝑘) 𝑢𝑘+ 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
= 0. (15)
Then the optimal control law can be obtained by
−2𝑅 (𝑥𝑘) 𝑢𝑘= 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
, (16)
which can be rewritten as
𝑢𝑘= −1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
. (17)
Substituting (17) into (11) gives
𝑉 (𝑥𝑘) = 𝑙 (𝑥
𝑘) +1
4
𝜕𝑉𝑇(𝑥𝑘+1)
𝜕𝑥𝑘+1
𝑔 (𝑥𝑘) [𝑅−1(𝑥𝑘)]𝑇
𝑅 (𝑥𝑘)
× 𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
+ 𝑉 (𝑥𝑘+1) .
(18)
Due to (if 𝐴 = 𝐴𝑇, then (𝐴−1)𝑇 = (𝐴𝑇)−1 =𝐴−1) [𝑅−1(𝑥𝑘)]𝑇= 𝑅−1(𝑥𝑘), one gets
𝑉 (𝑥𝑘) = 𝑙 (𝑥
𝑘) +1
4
𝜕𝑉𝑇(𝑥𝑘+1)
𝜕𝑥𝑘+1
𝑔 (𝑥𝑘) 𝑅−1(𝑥𝑘)
× 𝑔𝑇(𝑥𝑘) ⋅𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
+ 𝑉 (𝑥𝑘+1) ,
(19)
which can be expressed as
𝑙 (𝑥𝑘) + 𝑉 (𝑥
𝑘+1) − 𝑉 (𝑥
𝑘) +1
4
𝜕𝑉𝑇(𝑥𝑘+1)
𝜕𝑥𝑘+1
𝑔 (𝑥𝑘)
× 𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
= 0.
(20)
It is not simple to solve the HJB partial differential for-mulation (20) for𝑉(𝑥
𝑘). To overcome this awkward problem,
inverse optimal control is proposed [37].The discrete-time inverse optimal control problem can be
established as follows.
Lemma 1 (see [37]). Define the control law of the inverse opti-mal control
𝑢∗
𝑘= −1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝜕𝑉 (𝑥
𝑘+1)
𝜕𝑥𝑘+1
, (21)
which is globally stabilizing if the following two points are sat-isfied:
(1) it achieves (global) stability when 𝑥𝑘= 0 for system (8);
(2) 𝑉(𝑥𝑘) is a positive definite function (radial unbounded)
and the following formulation is established:
𝑉 := 𝑉 (𝑥𝑘+1) − 𝑉 (𝑥
𝑘) + 𝑢∗𝑇
𝑘𝑅 (𝑥𝑘) 𝑢∗
𝑘≤ 0. (22)
Since inverse optimal control is always used to get the min-imum or maximum 𝑉(𝑥
𝑘), a twice differentiable positive defi-
nite function can be proposed under meeting the requirementsof Lemma 3.1 in [23]. Then,
𝑉 (𝑥𝑘) =
1
2𝑥𝑇
𝑘𝐾𝑇𝑃𝐾𝑥𝑘, (23)

Mathematical Problems in Engineering 5
where 𝑃 = 𝐾𝑇𝑃𝐾, 𝑃 is a positive definite symmetric matrix,and 𝐾 is an additional gain matrix to modify the convergencerate of the tracking error.
Substituting (23) into (21), it follows that
𝑢∗
𝑘= −
1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘) ⋅ [
1
2× 2𝐾𝑇𝑃𝐾𝑥𝑘+1]
= −1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝐾𝑇𝑃𝐾 [𝑓 (𝑥
𝑘) + 𝑔 (𝑥
𝑘) 𝑢∗
𝑘]
= −1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝐾𝑇𝑃𝐾𝑓 (𝑥
𝑘)
−1
2𝑅−1(𝑥𝑘) 𝑔𝑇(𝑥𝑘)𝐾𝑇𝑃𝐾𝑔 (𝑥
𝑘) 𝑢∗
𝑘.
(24)
Then 𝑢∗𝑘can be formulated as
𝑢∗
𝑘= −
1
2[𝑅 (𝑥𝑘) +1
2𝑔𝑇(𝑥𝑘)𝐾𝑇𝑃𝐾𝑔 (𝑥
𝑘)]
−1
× 𝑔𝑇(𝑥𝑘)𝐾𝑇𝑃𝐾𝑓 (𝑥
𝑘) .
(25)
3.2. System Analysis. The control objective of single-phasegrid-connected inverter generally is the output current. Now,it is hoped to feed energy to the grid with unity power factorin most cases, and in smart microgrid the inverter is requiredto compensate the reactive power according to the load con-ditions. Based on the above discussion, it is easy to know thatthe variables to be controlled are the DC bus voltage andreactive power feeding to the grid.
The reactive power feeding to the grid can be defined asfollows [38]:
𝑄𝑓𝑔 (𝑘) = 𝑢
𝑇
𝑔(𝑘)√𝑖𝑔(𝑘)
2− (𝑈pv (𝑘) 𝐼pv (𝑘) 𝜂
𝑢𝑔 (𝑘)
)
2
, (26)
where 𝑢𝑔(𝑘) is the grid voltage, 𝑖
𝑔(𝑘) is the inverter output
current, 𝑈pv(𝑘) and 𝐼pv(𝑘) are the voltage and current of thephotovoltaic models, and 𝜂 is the efficiency of the grid-con-nected device which is set to 1 in order to compute briefly.
The static stable value using the reference for the reactivepower can be expressed as
𝑄ss𝑓𝑔(𝑘) =
𝑃ss𝑓𝑔(𝑘)
𝑓ss√1 − 𝑓2ss, (27)
where 𝑃ss𝑓𝑔(𝑘) is active power feeding to the grid and 𝑓ss is
static stable power factor.Therefore, the tracking errors of the state variables are
defined as
𝑒𝑈dc(𝑘) = 𝑈dc (𝑘) − 𝑈
ssdc (𝑘) ,
𝑒𝑄𝑓𝑔(𝑘) = 𝑄𝑓𝑔 (𝑘) − 𝑄
ss𝑓𝑔(𝑘) ,
(28)
where 𝑈dc is DC bus voltage in real-time state, 𝑈ssdc is DC bus
voltage in static-steady state, 𝑒𝑈dc
is difference of the DC busvoltage,𝑄
𝑓𝑔is reactive power feeding to the grid in real-time
state,𝑄ss𝑓𝑔is reactive power feeding to the grid in static-steady
state, and 𝑒𝑄𝑓𝑔
is difference of the reactive power.Combining the discrete-time state space model of single-
phase photovoltaic grid-connected inverter with the abovesystem analysis, the steady-state operating point for referencecan be formulated as
𝑈ssdc (𝑘) +
𝜏
𝐶𝑈ssdc (𝑘)
𝑢𝑇
𝑔(𝑘)𝑀𝑃𝑖
ss𝑔(𝑘) − 𝑈
ssdc (𝑘 + 1) = 0,
𝑢𝑇
𝑔(𝑘)√𝑖ss
𝑔(𝑘)2−(𝑈pv (𝑘) 𝐼pv (𝑘)
𝑢𝑔 (𝑘)
)
2
−𝑢𝑇
𝑔(𝑘)𝑀𝑃𝑖
ss𝑔(𝑘)
𝑓ss√1 − 𝑓2ss = 0.
(29)
The current feeding to the grid and the DC bus voltage ofsteady-state operation point can be obtained by (29).
3.3. Optimal Controller. In order to simplify the controllerdesign, the discrete-time state space model of single-phasephotovoltaic grid-connected inverter should be expressed asa general nonlinear discrete-time affine system.Therefore, wedefine a synthesis vector composed by the DC bus voltageand the current feeding to the grid which is written as 𝑥
𝑘=
[𝑈dc(𝑘) 𝑖𝑔𝑑(𝑘) 𝑖𝑔𝑞(𝑘)]𝑇, and its corresponding steady-state
vector is written as 𝑥ss𝑘= [𝑈
ssdc(𝑘) 𝑖
ss𝑔𝑑(𝑘) 𝑖
ss𝑔𝑞(𝑘)]𝑇
. Now, themodel can be expressed as
𝑥𝑘+1= 𝑓 (𝑥
𝑘) + 𝑔 (𝑥
𝑘) 𝑢𝑘+ ℎ𝑘, (30)
where
𝑓 (𝑥𝑘) =[[[
[
𝑈dc (𝑘) +𝜏
𝐶𝑈dc (𝑘)𝑢𝑇
𝑔(𝑘)𝑀𝑃𝑖𝑔 (𝑘)
−𝜏𝐴
𝐿𝑔
𝑈dc (𝑘) + (1 −𝜏𝑅𝑔
𝐿𝑔
) 𝑖𝑔 (𝑘)
]]]
]
,
𝑔 (𝑥𝑘) =
[[[[[
[
0 0
−2𝜏
𝐿𝑔
𝑈dc (𝑘) 0
0 −2𝜏
𝐿𝑔
𝑈dc (𝑘)
]]]]]
]
,
ℎ𝑘=
[[[[[[
[
0
−𝜏𝑢𝑔𝑑 (𝑘)
𝐿𝑔
−𝜏𝑢𝑔𝑞 (𝑘)
𝐿𝑔
]]]]]]
]
.
(31)
The tracking error of the state variables can be expressedas
𝑒𝑥𝑘= 𝑥𝑘− 𝑥
ss𝑘. (32)
Similarly,
𝑒𝑥𝑘+1= 𝑥𝑘+1− 𝑥
ss𝑘+1. (33)

6 Mathematical Problems in Engineering
Table 1: Characteristics of the controlled system.
Parameter Symbol Value(1) DC link capacitor 𝐶dc 4700 𝜇F
(2) Grid filter inductor 𝐿𝑔
2.1mH𝑅𝑔
0.6Ω(3) Switching frequency 𝜏 50 kHz(4) DC link voltage 𝑈dc 40V(5) Grid voltage 𝑢
𝑔22V
(6) Grid frequency 𝜔 50Hz
Combining (30), (32), and (33), we can get
𝑒𝑥𝑘+1= 𝑓 (𝑒𝑥
𝑘) +𝑓 (𝑥
ss𝑘) + 𝑔 (𝑒𝑥
𝑘+ 𝑥
ss𝑘) 𝑢𝑘+ ℎ𝑘− 𝑥
ss𝑘+1.
(34)
Generally, the composition of control variables is steady-state part and dynamic part. Therefore, we assume 𝑢
𝑘= 𝑢
ss𝑘+
𝑢∗
𝑘, and (34) can be expressed as
𝑒𝑥𝑘+1= 𝑓 (𝑒𝑥
𝑘) + 𝑓 (𝑥
ss𝑘) + 𝑔 (𝑒𝑥
𝑘+ 𝑥
ss𝑘) 𝑢
ss𝑘
+ 𝑔 (𝑒𝑥𝑘+ 𝑥
ss𝑘) 𝑢∗
𝑘+ ℎ𝑘− 𝑥
ss𝑘+1.
(35)
In order to make the formula match with the nonlineardiscrete-time affine system, we assume that
𝑓 (𝑥ss𝑘) + 𝑔 (𝑒𝑥
𝑘+ 𝑥
ss𝑘) 𝑢
ss𝑘+ ℎ𝑘− 𝑥
ss𝑘+1= 0,
𝑔∗(𝑒𝑥𝑘) = 𝑔 (𝑒𝑥
𝑘+ 𝑥
ss𝑘) .
(36)
Combining (35) and (36) yields
𝑢ss𝑘= (𝑔 (𝑒𝑥
𝑘) + 𝑥
ss𝑘)−1(−𝑓 (𝑥
ss𝑘) − ℎ𝑘+ 𝑥
ss𝑘+1) , (37)
𝑒𝑥𝑘+1= 𝑓 (𝑒𝑥
𝑘) + 𝑔∗(𝑒𝑥𝑘) 𝑢∗
𝑘. (38)
Now, the steady-state part of the control variable can beobtained by (37). In addition, (38) is a typical nonlinear dis-crete-time affine system, so we can use the conclusion ofSection 3.1. The dynamic part of the control variable can beformulated as
𝑢∗
𝑘= −1
2[𝑅 (𝑒𝑥
𝑘) +1
2𝑔∗𝑇(𝑒𝑥𝑘)𝐾𝑇𝑃𝐾𝑔∗(𝑒𝑥𝑘)]
−1
𝑔∗𝑇(𝑒𝑥𝑘)𝐾𝑇𝑃𝐾𝑓 (𝑒𝑥
𝑘) .
(39)
The controller design is completed at this point.
3.4. Optimization of the Performance Matrix. Many perfor-mance indicators have relationwith the choice of positive def-inite weighting matrix in the inverse optimal control; there-fore it is very meaningful and important to optimize the def-inite weightingmatrix of the optimal controller. In this paper,particle swarm algorithm is used to optimize the definiteweighting matrix.
Particle swarm optimization (PSO) is one of the intelli-gent optimization algorithms. In particle swarm, each particle
can move at different speeds in the search space, and it is ableto remember the optimal position which has been visited.In addition, all groups can share all optimal locations of theindividual particles. Each particle and group can mediate themovement speed and direction according to a certain strategyand their best position, and the search space tends to be theoptimal position for solving ultimately [39]. Each particle canbe updated according to the following formula in the solutionspace of their own position and velocity:
𝑉𝑘+1
𝑖𝑑= 𝑤 (𝑘)𝑉
𝑘
𝑖𝑑+ 𝑐1𝑟1(𝑃𝑘
𝑖𝑑− 𝑋𝑘
𝑖𝑑) + 𝑐2𝑟2(𝑃𝑘
𝑔𝑑− 𝑋𝑘
𝑖𝑑) ,
𝑋𝑘+1
𝑖𝑑= 𝑋𝑘
𝑖𝑑+ 𝑉𝑘+1
𝑖𝑑,
𝑤 (𝑘) = 𝑤start (𝑤start − 𝑤end)(𝑇max − 𝑘)
𝑇max,
(40)
where 𝑤(𝑘) is the inertia weight; 𝑤start is the initial inertiaweight; 𝑤end is the inertia weight of the iteration to themaximum number of times; 𝑘 is the number for the currentiteration; 𝑇max is the maximum number of iterations; 𝑑 = 1,2, . . . , 𝐷; 𝑘 = 1, 2, . . . , 𝑛; the entire group has 𝑛 particles, andeach particle is a vector with𝐷-dimension;𝑋
𝑖𝑑is the position
of particle;𝑉𝑖𝑑is the velocity of particle;𝑃
𝑖𝑑is extreme value of
individual; 𝑃𝑔𝑑
is extreme value for the group; 𝑐1and 𝑐2are
nonnegative constants, called acceleration factor; 𝑟1and 𝑟2are
random intervals number distributed in [0, 1].By optimizing, the fitness function for particle is defined
as follows:
𝑓pso =∑𝑀
𝑖=1((∑𝑁
𝑘=1√|Δ𝑥 (𝑖, 𝑘)|) /𝑁)
𝑀, (41)
in which 𝑀 is number of state variables to be controlledwhich is equal to the dimension of the search space;𝑁 is thesize of population.
4. Simulation Results
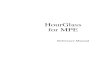
The performances of the proposed nonlinear optimal con-troller are illustrated by simulation usingMATLAB.Theprin-ciple of simulation setup based on the experimental sche-matic Figure 1 is described by Figure 3.
In order to verify that the controller has strong robustnessand weak dependence on the parameters of the system, twosimulations will be given. In the two simulations, the parame-ters of particle swarm are set as follows: iteration𝑇max is 1000,particle 𝑑 is 100, 𝑐
1and 𝑐2are 2, 𝑤start is 0.9, and 𝑤end is 0.4.
(1) The First Simulation. The control design parameters andvalues of the first simulation are given in Table 1.
The objection function evaluation by PSO is shown inFigure 4.
Optimized performance matrix is
𝑃 = [
[
0.7572 0.3685 0.6177
0.3685 0.7302 0.2362
0.6177 0.2362 0.7487
]
]
. (42)

Mathematical Problems in Engineering 7
Start
Particle swarminitialization
Particle swarmgeneration
Assigning particle swarm
performance indicator
System simulation:Udc(k + 1), ig(k + 1)
Objection functionevaluation: fpso(k)
Particle swarm updating operation:
NoYes
Superimposed times updatingk = k + 1 No
Yes
Terminationcondition:
No
End
to the matrix of successively
w(k) = wstart(wstart − wend )(Tmax − k)/TmaxVk+1id = w(k)Vk
id + c1r1(Pkid − Xk
id) + c2r2(Pkgd − Xk
id)
Xk+1id = Xk
id + Vk+1id
k ≤ kmax
fpso(dk) < fitness(dk)
fitness(dk) = fpso(dk)
min(fitness(dk)) < gbfitness
min(fitness(dk)) < gbfitness
Figure 3: The simulation flow diagram.
0 200 400 600 800 10000
0.5
1
1.5 Fitness of best individual
Iterations
Fitn
ess
Figure 4: Best individual fitness by performance optimization.
0 0.5 1 1.5 20
20
40
The number of samples
DC
bus v
olta
ge (V
)
State Reference
×104
Figure 5: The response curve of DC bus voltage.
Dynamic tracking of the DC bus voltage response curveis shown in Figure 5, wherein the red means the dynamic
0 0.5 1 1.5 2
0
2
4
6
The number of samples
State Reference
×104
dax
is cu
rren
t (A
)
Figure 6: The response curve of 𝑑 axis current.
tracking state values and blue indicates its reference value.Since grid is equivalent to infinite load in the system, its𝑑 axis reference current is set to 0. In order to ensure the unitypower factor, the 𝑞 axis current reference value is also set to0 apparently. Thus, the dynamic current tracking responsecurve of 𝑑 axis and 𝑞 axis is shown in Figures 6 and 7,similarly.
(2)The Second Simulation.The control design parameters andvalues of the second simulation are given in Table 2.
The objection function evaluation by PSO is shown inFigure 8.

8 Mathematical Problems in Engineering
0 0.5 1 1.5 2
0
0.5
The number of samples
Reference
State
×104
qax
is cu
rren
t (A
)
−0.5
Figure 7: The response curve of 𝑞 axis current.
0 200 400 600 800 1000
0
0.5
1
1.5 Fitness of best individual
Iterations
Fitn
ess
Figure 8: Best individual fitness by performance optimization.
Table 2: Characteristics of the controlled system.
Parameter Symbol Value(1) DC link capacitor 𝐶dc 6800𝜇F
(2) Grid filter inductor 𝐿𝑔
1mH𝑅𝑔
0.32Ω(3) Switching frequency 𝜏 45 kHz(4) DC link voltage 𝑈dc 40V(5) Grid voltage 𝑢
𝑔22V
(6) Grid frequency 𝜔 50Hz
Optimized performance matrix can be obtained like sim-ulation 1, so it is not necessary to repeat it here.
Dynamic tracking of the DC bus voltage response curveis shown in Figure 9, wherein the red means the dynamictracking state values and blue indicates its reference value.Since grid is equivalent to infinite load, its 𝑑 axis referencecurrent is set to 0. In order to ensure the unity power factor,the 𝑞 axis current reference value is also set to 0 apparently.Thus, the dynamic current tracking response curve of 𝑑 axisand 𝑞 axis is shown in Figures 10 and 11, similarly.
From Figures 5, 6, 7, 9, 10, and 11, it is obvious that theinverse optimal controller can realize zero steady-state errorand has good dynamic and steady response characteristics.Comparing the results of simulation 1 and simulation 2, it iseasy to prove that the controller has strong robustness to thechanging parameters of the system. In a word, the designedcontroller has less dependence on the system parameters andhas good performance.
5. Conclusion
In order to achieve the active and reactive power indepen-dently and use the low-cost microcontroller to implement
0 0.5 1 1.5 20
20
40
The number of samples
DC
bus v
olta
ge (V
)
ReferenceState
×104
Figure 9: The response curve of DC bus voltage.
0 0.5 1 1.5 2
0
2
4
6
The number of samples
ReferenceState
×104
dax
is cu
rren
t (A
)Figure 10: The response curve of 𝑑 axis current.
0 0.5 1 1.5 2
0
0.2
0.4
The number of samples
ReferenceState
×104
qax
is cu
rren
t (A
)
Figure 11: The response curve of 𝑞 axis current.
the control strategy directly, a discrete-time model of single-phase photovoltaic grid-connected inverter in the rotatingcoordinate system has been constructed in this paper. Sincethe bandwidth of the controller is required not to be veryhigh and it has good tracking performance of the optimalcontrol, this paper has proposed an optimal controller forthe single-phase inverter. Against the difficulty of solving theHJB partial differential equations, a Lyapunov function hasbeen constructed to solve the problem perfectly. In addition,the performance matrix has been optimized by the particleswarm optimization. The simulation results have shown thatthe proposed method is better to eliminate static error ofthe system, has good response characteristic, and has goodrobustness and following performance.The future researchesare to study the optimal control for thewhole systemswith thepreboost conversion portion and study the coordinate controlof the active and reactive power.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.

Mathematical Problems in Engineering 9
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (61273029, 61273027, and 61203026),the Natural Science Foundation of Liaoning (2013020037),the Fundamental Research Funds for the Central Universities(N130104001), and the Program for New Century ExcellentTalents in University, China (NCET-12-0106).
References
[1] M. A. G. de Brito, L. P. Sampaio, L. G. Junior, and C. A. Canesin,“Research on photovoltaics: review, trends and perspectives,” inProceedings of the 11th Brazilian Power Electronics Conference(COBEP ’11), pp. 531–537, September 2011.
[2] F. Blaabjerg, F. Iov, T. Kerekes, and R. Teodorescu, “Trends inpower electronics and control of renewable energy systems,” inProceedings of the 14th International Power Electronics andMotion Control Conference (EPE-PEMC ’10), pp. K1–K19,September 2010.
[3] K.-H. Chao, L.-Y. Chang, and H.-C. Liu, “Maximum powerpoint tracking method based on modified particle swarmoptimization for photovoltaic systems,” International Journal ofPhotoenergy, vol. 2013, Article ID 583163, 6 pages, 2013.
[4] N. Femia, G. Petrone, G. Spagnuolo, and M. Vitelli, “Optimiza-tion of perturb and observe maximum power point trackingmethod,” IEEE Transactions on Power Electronics, vol. 20, no.4, pp. 963–973, 2005.
[5] Q. Mei, M. Shan, L. Liu, and J. M. Guerrero, “A novel improvedvariable step-size incremental-resistanceMPPTmethod for PVsystems,” IEEETransactions on Industrial Electronics, vol. 58, no.6, pp. 2427–2434, 2011.
[6] M.Matsui, T. Kitano, andD. Xu, “A newmaximumphotovoltaicpower tracking control scheme based on power equilibrium atDC link,” Industrial Electronics Society Proceedings, vol. 2, no. 2,pp. 804–809, 1999.
[7] N. Khaehintung, A. Kunakorn, and P. Sirisuk, “A novel fuzzylogic control technique tuned by particle swarm optimizationfor maximum power point tracking for a photovoltaic systemusing a current-mode boost converter with bifurcation control,”International Journal of Control, Automation and Systems, vol. 8,no. 2, pp. 289–300, 2010.
[8] K. Ro and S. Rahman, “Two-loop controller for maximizingperformance of a grid-connected photovoltaic-fuel cell hybridpower plant,” IEEE Transactions on Energy Conversion, vol. 13,no. 3, pp. 276–281, 1998.
[9] B. Bolsens, K. de Brabandere, J. van den Keybus, J. Driesen, andR. Belmans, “Model-based generation of lowdistortion currentsin grid-coupled PWM-inverters using an LCL output filter,”IEEE Transactions on Power Electronics, vol. 21, no. 4, pp. 1032–1040, 2006.
[10] Q.-L. Zhao, X.-Q. Guo, and W.-Y. Wu, “Research on controlstrategy for single-phase grid-connected inverter,” Proceedingsof the Chinese Society of Electrical Engineering, vol. 27, no. 16,pp. 60–64, 2007.
[11] F. Delfino, G. B. Denegri,M. Invernizzi, and R. Procopio, “Feed-back linearization oriented approach toQ-V control of grid con-nected photovoltaic units,” IET Journals &Magazine, vol. 6, no.5, pp. 324–339, 2012.
[12] K. Mu, X. Ma, X. Mu, and D. Zhu, “A new nonlinear controlstrategy for three-phase photovoltaic grid-connected inverter,”in Proceedings of the International Conference on Electronic andMechanical Engineering and Information Technology (EMEIT’11), pp. 4611–4614, August 2011.
[13] P. Geng, W. Wu, Y. Ye, and Y. Liu, “Single-phase time-sharingcascaded photovoltaic inverter based on repetitive control,”Transactions of China Electrotechnical Society, vol. 26, no. 3, pp.116–122, 2011.
[14] S. Dasgupta, S. N.Mohan, and S. K. Sahoo, “Lyapunov function-based current controller to control active and reactive powerflow from a renewable energy source to a generalized three-phase micro-grid system,” IEEE Transactions on Industrial Elec-tronics, vol. 60, no. 2, pp. 799–813, 2013.
[15] H. Ma, F. Xu, L. Du, and X. Chen, “Discrete-time passivity-based sliding-mode control of single-phase current-sourceinverter,” in Proceedings of the 35th Annual Conference of theIEEE Industrial Electronics Society (IECON ’09), pp. 403–407,November 2009.
[16] J. J. Negroni, D. Biel, F. Guinjoan, and C. Meza, “Energy-balance and sliding mode control strategies of a cascade H-bridge multilevel converter for grid-connected PV systems,”in Proceedings of the IEEE-ICIT International Conference onIndustrial Technology (ICIT ’10), pp. 1155–1160, March 2010.
[17] M. Pahlevaninezhad, P. Das, J. Drobnik, and G. Moschopoulos,“A nonlinear optimal control approach based on the control-lyapunov function for an AC/DC converter used in electricvehicles,” IEEE Transaction on Industrial Informatics, vol. 8, no.3, pp. 596–614, 2012.
[18] R. Ruiz-Cruz, E. N. Sanchez, F. Ornelas-Tellez, and A. G. Louk-ianov, “Particle swarm optimization for discrete-time inverseoptimal control of a doubly fed induction generator,” IEEETransactions on Cybernetics, vol. 43, no. 2, pp. 1–12, 2012.
[19] D.-X. Shuai, Y.-X. Xie, and X.-G. Wang, “Optimal control ofbuck converter by state feedback linearization,” Proceedings ofthe Chinese Society of Electrical Engineering, vol. 28, no. 33, pp.1–5, 2008.
[20] B. S. Leon, A. Y. Alanis, E. N. Sanchez et al., “Inverse optimalcontrol of buck converter by state feedback linearization,” inProceedings of the Decision and Control and European ControlConference, pp. 1048–1053, 2011.
[21] A. Zhang, Y. Wang, C. Chen, and H. R. Karimi, “New strategyfor analog circuit performance evaluation under disturbanceand fault value,” Mathematical Problems in Engineering, vol.2014, Article ID 728201, 8 pages, 2014.
[22] J.-K. Park, K. Park, T.-Y. Kuc, and K.-H. You, “Dynamicstate feedback and its application to linear optimal control,”International Journal of Control, Automation, and Systems, vol.10, no. 4, pp. 667–674, 2012.
[23] F. Ornelas, E. N. Sanchez, and A. G. Loukianov, “Discrete-time inverse optimal control for nonlinear systems trajectorytracking,” inProceedings of the 49th IEEEConference onDecisionand Control (CDC ’10), pp. 4813–4818, December 2010.
[24] F. Orenelas-Tellz, E. N. Sanchez, A. G. Loukianov, and E. M.Navarro-Lopez, “Speed-gradient inverse optimal control fordiscrete-time nonlinear systems,” in Proceedings of the IEEEDe-cision and Control and European Control Conference, pp. 290–295, 2011.
[25] M.-Q. Mao, L. Yu, B. Xu, and R.-G. Huang, “Research of D-Qcontrol and simulation for single phase current source invert-ers,” Journal of System Simulation, vol. 23, no. 12, pp. 2727–2731,2011.

10 Mathematical Problems in Engineering
[26] S. Golestan, M. Joorabian, H. Rastegar, A. Roshan, and J. M.Guerrero, “Droop based control of parallel-connected single-phase inverters in D-Q rotating frame,” in Proceedings of theIEEE International Conference on Industrial Technology (ICIT’09), pp. 1–6, February 2009.
[27] H. Li, B. Wu, G. Li et al., Delta Operator Control and Its RobustControl Theory, National Defense Industry Press, Beijing,China, 2005.
[28] G. C. Goodwin, R. L. Leal, D. Q. Mayne, and R. H. Middleton,“Rapprochement between continuous and discretemodel refer-ence adaptive control,” Automatica, vol. 22, no. 2, pp. 199–207,1986.
[29] G. C. Goodwin, Improved FiniteWord Length Characteriation inDigital Control Using Delta Operations, Department of Electri-cal and Computer Engineering, University of Newcastle, 1984.
[30] H. Zhang, Q. Wei, and Y. Luo, “A novel infinite-time optimaltracking control scheme for a class of discrete-time nonlinearsystems via the greedy HDP iteration algorithm,” IEEE Trans-actions on Systems, Man, and Cybernetics B: Cybernetics, vol. 38,no. 4, pp. 937–942, 2008.
[31] Y.-J. Liu, C. L. P. Chen, G.-X. Wen, and S. Tong, “Adaptiveneural output feedback tracking control for a class of uncertaindiscrete-time nonlinear systems,” IEEE Transactions on NeuralNetworks, vol. 22, no. 7, pp. 1162–1167, 2011.
[32] H. G. Zhang, L. L. Cui, and Y. H. Luo, “Nearoptimal control fornonzero-sum differential games of continuous-time nonlinearsystems using singlenetworkADP,” IEEETransactions on Cyber-netics, vol. 43, no. 1, pp. 206–216, 2008.
[33] Y.-J. Liu and S. Tong, “Adaptive fuzzy control for a class of non-linear discrete-time systems with Backlash,” IEEE Transactionson Fuzzy Systems, 2013.
[34] F. Ornelas-Tellez, E. N. Sanchez, and A. G. Loukianov, “Dis-crete-time inverse 10 submission to mathematical problems inengineering optimal control for block control form nonlinearsystems,” in Proceedings of the World Automation Congress, pp.1–9, 2012.
[35] J. Stewart, “Positive definite functions and generalizations, anhistorical survey,”The Rocky Mountain Journal of Mathematics,vol. 6, no. 3, pp. 409–434, 1976.
[36] F. Ornelas-Tellez, E. N. Sanchez, and A. G. Loukianov, “Dis-crete-time neural inverse optimal control for nonlinear systemsvia Passivation,” IEEE Transaction on Neural Network andLearning Systems, vol. 23, no. 8, pp. 1327–1339, 2012.
[37] F. Ornelas, E. N. Sanchez, and A. G. Loukianov, “Discrete-timenonlinear systems inverse optimal control: a control Lyapunovfunction approach,” in Proceedings of the 20th IEEE Interna-tional Conference on Control Applications (CCA ’11), pp. 1431–1436, September 2011.
[38] S. Peng, A. Luo, F. Rong, J. Wu, and W. Lu, “Single-phase pho-tovoltaic grid-connected control strategy with LCL filter,” Pro-ceedings of the Chinese Society of Electrical Engineering, vol. 32,no. 21, pp. 17–24, 2011.
[39] H. Chen, L. Kong, and D.-J. Zhao, “Particle swarm optimi-zation-based extremum seeking control for limit cycle mini-mization,” Control and Decision, vol. 26, no. 6, pp. 811–815, 2011.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of