Embed Size (px)
Citation preview

Research ArticleDevelopment of Magnetorheological Resistive ExerciseDevice for Rowing Machine
Vytautas Grigas Anatolijus Šulginas and Pranas Ciliukas
Mechanical Engineering Department Mechanical Engineering and Design Faculty Kaunas University of TechnologyStudentu 56-302 LT-54214 Kaunas Lithuania
Correspondence should be addressed to Vytautas Grigas vytautasgrigasktult
Received 30 December 2015 Revised 24 March 2016 Accepted 11 April 2016
Academic Editor Guan H Yeoh
Copyright copy 2016 Vytautas Grigas et alThis is an open access article distributed under the Creative CommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Training equipment used by professional sportsmen has a great impact on their sport performance Most universal exercisers mayhelp only to improve the general physical condition due to the specific kinematics and peculiar resistance generated by theirloading units Training of effective techniques and learning of psychomotor skills are possible only when exercisers conformto the movements and resistance typical for particular sports kinematically and dynamically Methodology of developing amagnetorheological resistive exercise device for generating the desired law of passive resistance force and its application in a lever-type rowing machine are described in the paper The structural parameters of a controllable hydraulic cylinder type device werefound by means of the computational fluid dynamics simulation performed by ANSYS CFX software Parameters describing themagnetorheological fluid as non-Newtonian were determined by combining numerical and experimental research of the resistanceforce generated by the original magnetorheological damper A structural scheme of the device control system was developed andthe variation of the strength of magnetic field that affects the magnetorheological fluid circulating in the device was determinedensuring a variation of the resistance force on the oar handle adequate for the resistance that occurs during a real boat rowingstroke
1 Introduction
A lot of universal technical equipment such as rubber bandsand dumbbells or computerized exercisingmachines is com-monly used for training general physical condition (strengthand endurance) In order to trainimprove such specificfeatures as the technique and coordination of movements orpsychomotor skills special exercisers should be employed Inthis case not only the nominal size of the resistance to the ath-letersquos movements set prior to exercising but also the kinemat-ics of movements and variation of the resistance force duringthe stroke are important These aspects of training are con-sidered in specialized exercisers simulating movements andloads that are specific to the particular sports (rowing eg)and for rehabilitation purposes or testing the physical con-dition by means of dynamometers ensuring special modeslike isokinetic isotonic and so forth [1ndash3] Such specialmodes may be realized only by sophisticated and expensivecomputer-controlled electromechanical or electromagnetical
devices such as isokinetic dynamometersTherefore the vastmajority of exercisers can only ensure a possibility to choosethe nominal resistance level before starting to exercise (egby selecting the proper size of the weight stack stiffness ofthe rubber band or the resistance level of the adjustablehydraulic cylinder type dampers) As a result the variation ofthe resistance force during the exercise cycle depends on thekinematics of the exerciser and the athletersquos efforts theacceleration range and speed of movements
The same may be said about rowing machines especiallypopular due to their versatility rowing has a significant effecton training the strength of most of the human musclesimproves endurance and has a positive impact on cardio-vascular respiratory systems and so forth thus rowingsimulators are often used as ergometers by both amateurand professional rowers While exercising proper movementtechnique is especially important for the latter as well as otherprofessional sportsmen aiming at highest sports results [4ndash6]However due to specific features related to seasonal changes
Hindawi Publishing CorporationComputational and Mathematical Methods in MedicineVolume 2016 Article ID 8979070 14 pageshttpdxdoiorg10115520168979070
2 Computational and Mathematical Methods in Medicine
rowing is either not always possible or quite expensiveunder real conditions so attempts are continuously madeto develop a rowing machine able to simulate real rowingadequately including kinematics ofmovements and variationof resistance force which is specific within one stroke cycleand changes during the competition [7ndash9] Hydrodynamicresistance force characteristic to rowing differs significantlyfrom gravitational inertial or elastic resistance that is typicalfor most of the common exercisers because it reaches itsmaximal value at the middle of the strokeTherefore in orderto improve the rowersrsquo training possibilities a lot of specifichydrodynamic aerodynamic magnetic or combined (withinertial) resistance rowing machines were built [10] includ-ing whole boatsmounted in pools [11] But usually they eitherdiffer significantly from the real boat by their kinematicsand resistance force or are highly expensive and nontrans-portable
Recent achievements in the development of smart mate-rial technologies (including fluids with controllable prop-erties like magnetorheological fluids (MR fluids)) have ledto the creation and widening spread of technical solutionsthat ensure controlling the kinematics and dynamics ofthe various purpose machines during their operation Forinstance the magnetorheological dampers became almost astandard component of automotive suspensions and somesorts of industrial equipment Nowadays magnetorheologi-cal devices are also encountered in rotary-movement activeor passive orthoses [12] loading units of specialized armsor legs as well as universal training machines [13ndash17] andother human-powered equipment due to their rapidity safetyreliability and relative simplicity
The aim of the research was to develop a resistive exercisedevice based on magnetorheological fluid technology and itscontrol system for the rowing machine The device shouldensure variation of the resistance force on the oar handleadequate for hydrodynamic resistance which occurs duringa real boat rowing stroke
2 Structure and Main Properties ofthe Lever-Type Rowing Machine
21 Structure of the Lever-Type Rowing Machine Among agreat variety of rowing machines lever-type simulators suchas ldquoKettler Kadettrdquo [18] or ldquoHAMMER Cobrardquo [19] equippedwith linear hydraulic cylinder (HC) type load generatingunits are the most adequate for a real sculling boat Thetwo main issues making these simulators most useful are thekinematics of the levers corresponding to boat oars (makingthe athletersquos movements very similar to the real rowing)and the hydrodynamic character of the resistance force (theresistance during the exercise cycle depending on how fastthe oar is pulled) Although the geometry of the mentionedexercisers (lengths of the levers position of hingesoars locksetc) is not exactly the same as in real boats differences arerelatively small and may be easily evaluated during furtherimprovement of the device In addition the relative simplicityof such a rowing machine design implies the possibility ofreplacement of regular hydraulic cylinders by controllable
(during single strokes and their sequence) resistive exercisedevices
The lever-type rowing machine ldquoHAMMER Cobrardquo [19]equipped with manually adjustable resistance hydrauliccylinders (12 levels 1st the lowest and 12th the highestdefined by adjusting the ring on the rod end of the cylinder)was used as a prototype (Figures 1 and 2)Themain geometri-cal parameters of the rowingmachine (Figure 1) determiningthe degree of its kinematic similarity to a real boat are thespread (scull) or the distance between oars hingeslocks 119878
(158m) and the lengths of the levers representing oar handles1198711(074m) having the arms 119871
2(0135m) to which the
hydraulic cylinders rods are connected (armsrsquo ratio 11987111198712
=
55)
22 Kinematic-Dynamic Properties of the Lever-Type RowingMachine Kinematic characteristics of the rowing machine(movement of the levers simulating oar handles and pistonrods of hydraulic cylinders) were measured by using 3DMotion Capture system ldquoQualisysrdquo controlled by ldquoQTMrdquo(ldquoQualisys TrackManagerrdquo) software (Qualisys Sweden)Thecontrol points (cylinder and rod ends ends of levers and cen-ters of hinges connecting them)weremarked by 15mmdiam-eter spherical reflective markers (Figure 2) and the variationof their positions during exercising was recorded in real timemode by six computer-controlled 500Hz frequency infraredspectrum digital cameras Resistance force 119865
2 generated by
the HC type load generating unit was measured simultane-ously by means of the mobile multichannel system ldquoSpiderMobil-8rdquo (HBM Germany) with the 2500N capacity S9 typeforce sensor inserted between the hydraulic cylinder cap endand the frame (Figure 2)
In this way the dependency of resistance force 1198652gener-
ated by HC type load generating unit on the HC piston dis-placement and HC rodpiston displacement dependency ontime (thereby its speed) during the rod extraction caused bypulling the levers imitating oars handles was determined Anexperienced youth female rower (aged 22) practicing activelyfor more than 5 years took part in the investigation Warm-up was made at the beginning of each measurement thenmeasurements were performed with different resistance lev-els of the cylinder (1st 5th and 9th) set before exercising andat two different rates (normal and fast 24 and 30 cycles perminute resp) not less than 10 strokes for each combinationof parameters
The results of the investigation of the rowing machinekinematics and resistance force were compared with theresults of experimental research carried out earlier by theauthors of this paper [20 21] or described in [10 22ndash24]
The measurements of the kinematical parameters of therowing machine have shown that the stroke of the hydrauliccylinder approximately equals 170mm and practically doesnot depend on the selected resistance level and exercisingrate The maximal speed of HC rod extraction at the lowest(1st) resistance level is 022ms when exercising at a normalrate and near 03ms when exercising at a fast rate (in therecovery phase 03ms and 035ms resp) Research of therowing boat fixed in the pool described in [21] gave the speed
Computational and Mathematical Methods in Medicine 3
(1) Machine frame(2) Crosspiece with oars hinges at its ends
(3) L-shaped levers imitating oars(4) Hydraulic cylinders generating resistance
1
2 2
S
3 3
4 4
F1
L1
V2
L2
F2
V1
Figure 1 Structure of lever-type rowing machine and kinematical scheme of resistance system 119878 spread (scull) 1198711and 119871
2 lengths of L-
shaped levers imitating oar handles (119878 = 158m 1198711
= 074m and 1198712
= 0135m) 1198651 force on oar handle and 119865
2 resistance force generated
by hydraulic cylinder
Figure 2 Location of the markers of 3D Qualisys mocap system onthe rowingmachine andHBMS9 type force sensor inserted betweenthe hydraulic cylinder bottom end and the frame
of oar handle 15ms in the drive phase and 2ms in the recov-ery phase For a rowing machine having the L-shaped leverarms 119871
1and 119871
2ratio equal to 55 these parameters would
correspond to 027 and 036ms speed of the rodpistoninsertion respectively
The measurements of the HC resistance have shown thatin the drive phase of the stroke the law of change of theresistance force generated by the adjustable hydraulic cylin-der of the ldquoHAMMER Cobrardquo rowing machine (Figure 3) isof similar hydrodynamic character as the resistance force ofthe most popular rowing simulators Concept II [10] or Row-perfect [25] However it is not exactly the same as obtainedby measuring the rowing force when rowing a real boat [2023 24] inter alia depending on the position of the rower in
25 3 35 4 45 52Time (s)
minus100
300
700
1100
1500
Resis
tanc
e for
ce (N
)
Figure 3 The law of change of resistance force generated byhydraulic cylinder type load generating unit of HAMMER Cobrarowing machine during a single stroke cycle (exercising rate 24strokesmin resistance level 5)
a boat the stage of the race and other factors [26] The driveforce impulse curve is very smooth and almost symmetricalresistance in the recovery phase is near to zero (dozens ofnewtons) It should also be noted that due to the peculiaritiesof such type rowing simulator design the resistance forcepractically does not depend on the vertical position of the oarhandle In reality it corresponds to the depth of immersion ofthe oar blade into water which means that from this pointof view the lever-type rowing machine does not meet realrowing conditions
In the case of real rowing the force on the oar handlewas about 600N in the drive phase and 100N in the recovery
4 Computational and Mathematical Methods in Medicine
phase (male athletes) [20]Themaximal resistance force gen-erated by the hydraulic cylinder load generating unit (femaleathlete) was about 1100N at the first resistance level and1250N at the fifth resistance level When the ninth resistancelevel was set the attempts to exercise failed due to too highresistance force exceeding 1800N (at a lower exercising rate)If these forces are recalculated to the force on oar handleand the ratio of arms 119871
1and 119871
2of the L-shaped lever of
the rowing machine is considered 55 times lower resistancewill be received 210ndash330N peaks in the middle of thedrive phase and 10ndash20N almost during the whole recoveryphase (ie 2-3 times smaller than in the referenced case)
23 Resistance Force Generated by Linear Stroke HydraulicCylinder Type Load Generating Units In order to collectmore information about functionality of the HC type loadgenerating units used in lever-type rowing machines exper-imental research of their resistance force was carried out[27] The variation of resistance force size during the strokeof adjustable hydraulic cylinders taken from three rowingmachines was measured at different operating modes thespeed of rod extraction resistance level of the cylinder andthe temperature of the cylinder All the three cylinders wereof the same twin-tube design the diameter of their pistonswas 25mm external diameter 65mm and stroke sim275mmInvestigation showed that force characteristics of all the threeadjustable HCs apparently differ both qualitatively and quan-titatively the force curves are quite uneven (variation of theresistance force is up to 30 of the nominal value at constantvelocity of the piston) and the nominal resistance force size isdifferent even when the same resistance level (1stndash12th) is setbefore exercising Thus even if the design and kinematics ofall rowingmachines seem to be very similar the resistance onthe oar handle may be quite different for different exerciserseven at the same resistance level set by the adjustment ringTherefore it is important to use a proper cylinder whenreplacing either a broken or a worn one or both cylindersshould be replaced to ensure the symmetry of resistance
In parallel with the research described above the depen-dency of resistance force of the HC type load generatingunits on their body temperature has been investigated takinginto account its evident rise during exercising The resistancecharacteristics and the temperature of the cylinder bodywere measured every 100 cycles of exercising by means ofa universal computerized two-column desktop machine fortesting materialsrsquo mechanical properties ldquoH25KTrdquo (TiniusOlsen USA) equippedwith the force sensorHTE-1000N andcontrolled by the ldquoQMATrdquo software HC body temperaturewas measured by an infrared (IR) thermometer ldquoTesto 845rdquo(Testo Inc USA)When rowing at the rate of 50 strokesminthe temperature of hydraulic cylinder number 1 body reached76∘C after 1400 strokes and the temperature of hydrauliccylinder number 2 63∘C (Figure 4) which caused a cor-responding drop of the resistance force For example theresistance force of hydraulic cylinder number 1 decreasedfrom 450N at 20∘C temperature down to 150N as it heatedup to 55∘C (Figure 5) These facts allow us to state thateven at relatively low exercising intensity the resistance levelof the hydraulic cylinder should be periodically adjusted
Number 1
Number 2
0
25
50
75
100
Tem
pera
ture
(∘C)
350 700 1050 14000Number of strokes
Figure 4 Dependencies of the temperature of hydraulic cylindernumbers 1 and 2 on the number of exercise cycles (exercising rate50 strokesmin)
0
100
200
300
400
500
0 55 110 165 220
Resis
tanc
e for
ce (N
)
Displacement (mm)
55∘C
50∘C
45∘C
40∘C
35∘C
30∘C
25∘C
20∘C
Figure 5 Dependencies of the resistance force generated byhydraulic cylinder number 2 on its body temperature (speed ofrodpiston extraction 0015ms)
(increased) in order to maintain constant resistance duringthe whole exercising process
Thus the study of a rowing machine real rowing kine-matics and the resistance force gave the information aboutthe range and characteristics of the resistance force and HCpistonrod speed that should be ensured to make the law ofresistance force adequate for real rowing
The research of dynamic characteristics of HC type loadgenerating units used in lever-type rowing machines alsoallows us to conclude that several essential deficiencies aretypical to such devices (and the machines where they areused)
(i) Stability of the resistance force at a constant speed ofthe rodpiston extraction is not ensured
(ii) The size of resistance force depends significantly onthe HC temperature increasing with the number ofexercise cycles that requires periodical adjustment ofthe load generating unit during exercising
Computational and Mathematical Methods in Medicine 5
(iii) The similarity of the law of resistance force variationto the resistance obtained during real rowing is onlyqualitative some factors (like depth of oar immersioninto water) are neglected
(iv) There is no possibility to control the resistance forceduring an exercise cycle
To eliminate the above-mentioned deficiencies of regularlever-type rowing machines equipped with the (manually)adjustable HC type load generating units these units shouldbe replaced by controllable (during stroke or sequence ofstrokes) resistive exercise devices for example based onmagnetorheological fluid technology
3 Methods of Solution
To improve a rowing machine so that it would better cor-respond to real rowing it is enough to replace its regularHC type load generating units by controllable (during stroke)resistive exercise devices Such devices should generate resis-tance dependent not only on the exercising rate and conse-quently the speed of pulling oar handles but also on variouskinematic-dynamic parameters characterizing the run ofeach rowing stroke or even the sequence of strokes (if simu-lation of different training modes or competition is desired)These parameters should be measured by the set of sensors(vertical and horizontal position and angular velocities oflevers simulating oars resistance force etc) integrated with aprogrammable control system adjusting the resistive exercisedevicesThemagnetorheological fluid technology seems to bemost easily implemented for this type ofmachinery with suchfunctional parameters The control of resistance force gener-ated by such a device is ensured by controlling the viscosityof the MR fluid circulating within it by means of a magneticfield The more viscous the fluid the larger the resistance toits flow what in the case of a hydraulic cylinder type devicewhere the fluid flows between the chambers separated bythe movable piston may be related to the speed of pistonrod insertionextraction under the effect of external force
Development of such peculiar devices is hardly imag-inable without application of computer aided technologiesnamely computational fluid dynamic (CFD) especially in thecase of application of smart materials such asMR fluids hav-ing very specific material properties Thus the first problemthat arose after the decision was made to develop a hydrauliccylinder type controllable resistive exercise device based onMR fluid technology proper description of such fluid prop-erties being definitely non-Newtonian It is related to the lackof information about dependencies of commercially availableMR fluid properties on the strength of the magnetic fieldAfter this problem was solved as described in Section 31themagnetorheological resistive exercise devicewas designedand its parameters ensuring the necessary range of the resis-tance force were determined as shown in Section 32 Finallythe law of change of themagnetic field acting on theMR fluidwithin the magnetorheological resistive exercise device wasderived which ensures the law of variation of the resistanceforce adequate for the resistance force on the oar handlewhen rowing a real boat (Section 34)
31 Parameters of Non-Newtonian Model of the Magnetorhe-ological Fluid MR fluids are non-Newtonian that is theirrelationship between the shear stress and shear strain rateis not simply linear ANSYS CFX software used during thisresearch has several models for calculating viscosity basedon shear strain rate [28] Among them the Herschel-Bulkleymathematical model for viscoplastic fluids appears to be themost suitable when the MR fluid MRF140-CG (Lord USA[29]) is applied in the device to be designed [30] To describethe dynamical viscosity of such fluids by this mathematicalmodel two specific parameters are required viscosity consis-tency 119870 and yield stress 120591
119884of the fluid both dependent on
the strength of the magnetic field acting on the fluid
120583 =120591119884
(120582)+ 119870 sdot (120582)
119899minus1
(1)
where119870 is viscosity consistency (Pasdots119899) defining viscosity of afluid 119899 is linear power law index of the fluid 120591
119884is yield stress
of the fluid (Pa) is gradient of shear velocity (or shear strainrate) (1s) and 120582 is time constant
The yield stress 120591119884dependency on the strength of the
magnetic field for MR fluid MRF140-CG is presented by itsmanufacturer [29] while the effect of the magnetic field onviscosity consistency 119870 is not specified thus this is the onlyunknown factor that should be found to describe physicalproperties of MR fluid adequately
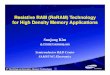
For this purpose a computer aided simulation of an orig-inal designMR damper manufactured at KTU (Figure 6) wascarried out using the results of experimental investigation ofits resistance force when operating at different modes as ref-erence data [31] The main structural parameters of a single-acting twin-tube hydraulic cylinder type MR damper are asfollows piston (and inner tube internal) diameter 13mminner tube external diameter 165mm piston rod diameter6mm stroke 44mm and outer tube internalexternal diam-eters 25420mm
At first a 3D geometrical model of the MR damperand a computational finite element model of computationaldomain corresponding to its cavities filled with MR fluid(Figure 7) were created The finite element mesh consistedof sim390000 003ndash63mm size volume elements (the meshwas refined in the zones of outlet areas and narrowestchannels of the base valve) Then the numerical simulationof MR damper operation was performed by using ANSYSCFX CFD code During the simulation the resistance forcegenerated by the MR damper resulting from the pressureacting on piston 6 moving inside cylinder 2 was found fordifferent combinations of piston 6 speeds (0001 0002 00350005 and 00075ms) and the strength of the magnetic fieldgenerated by magnetic coil 7 (0 13 25 and 38mT) affectingthe MR fluid in the zone of magnetorheological base valve4 Computations were performed by specifying the inletvelocity of the fluid at the round surface corresponding to theend of the piston (larger circle in themiddle of computationaldomain (Figure 7(a))) and the outlet to the nonpressur-ized environment via four circular openings connecting therebound chamber inside the inner tube with the tubularchannel between inner and outer tubes (four smaller circlesat the left end of computational domain (Figure 7(a))) For
6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
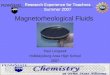
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

2 Computational and Mathematical Methods in Medicine
rowing is either not always possible or quite expensiveunder real conditions so attempts are continuously madeto develop a rowing machine able to simulate real rowingadequately including kinematics ofmovements and variationof resistance force which is specific within one stroke cycleand changes during the competition [7ndash9] Hydrodynamicresistance force characteristic to rowing differs significantlyfrom gravitational inertial or elastic resistance that is typicalfor most of the common exercisers because it reaches itsmaximal value at the middle of the strokeTherefore in orderto improve the rowersrsquo training possibilities a lot of specifichydrodynamic aerodynamic magnetic or combined (withinertial) resistance rowing machines were built [10] includ-ing whole boatsmounted in pools [11] But usually they eitherdiffer significantly from the real boat by their kinematicsand resistance force or are highly expensive and nontrans-portable
Recent achievements in the development of smart mate-rial technologies (including fluids with controllable prop-erties like magnetorheological fluids (MR fluids)) have ledto the creation and widening spread of technical solutionsthat ensure controlling the kinematics and dynamics ofthe various purpose machines during their operation Forinstance the magnetorheological dampers became almost astandard component of automotive suspensions and somesorts of industrial equipment Nowadays magnetorheologi-cal devices are also encountered in rotary-movement activeor passive orthoses [12] loading units of specialized armsor legs as well as universal training machines [13ndash17] andother human-powered equipment due to their rapidity safetyreliability and relative simplicity
The aim of the research was to develop a resistive exercisedevice based on magnetorheological fluid technology and itscontrol system for the rowing machine The device shouldensure variation of the resistance force on the oar handleadequate for hydrodynamic resistance which occurs duringa real boat rowing stroke
2 Structure and Main Properties ofthe Lever-Type Rowing Machine
21 Structure of the Lever-Type Rowing Machine Among agreat variety of rowing machines lever-type simulators suchas ldquoKettler Kadettrdquo [18] or ldquoHAMMER Cobrardquo [19] equippedwith linear hydraulic cylinder (HC) type load generatingunits are the most adequate for a real sculling boat Thetwo main issues making these simulators most useful are thekinematics of the levers corresponding to boat oars (makingthe athletersquos movements very similar to the real rowing)and the hydrodynamic character of the resistance force (theresistance during the exercise cycle depending on how fastthe oar is pulled) Although the geometry of the mentionedexercisers (lengths of the levers position of hingesoars locksetc) is not exactly the same as in real boats differences arerelatively small and may be easily evaluated during furtherimprovement of the device In addition the relative simplicityof such a rowing machine design implies the possibility ofreplacement of regular hydraulic cylinders by controllable
(during single strokes and their sequence) resistive exercisedevices
The lever-type rowing machine ldquoHAMMER Cobrardquo [19]equipped with manually adjustable resistance hydrauliccylinders (12 levels 1st the lowest and 12th the highestdefined by adjusting the ring on the rod end of the cylinder)was used as a prototype (Figures 1 and 2)Themain geometri-cal parameters of the rowingmachine (Figure 1) determiningthe degree of its kinematic similarity to a real boat are thespread (scull) or the distance between oars hingeslocks 119878
(158m) and the lengths of the levers representing oar handles1198711(074m) having the arms 119871
2(0135m) to which the
hydraulic cylinders rods are connected (armsrsquo ratio 11987111198712
=
55)
22 Kinematic-Dynamic Properties of the Lever-Type RowingMachine Kinematic characteristics of the rowing machine(movement of the levers simulating oar handles and pistonrods of hydraulic cylinders) were measured by using 3DMotion Capture system ldquoQualisysrdquo controlled by ldquoQTMrdquo(ldquoQualisys TrackManagerrdquo) software (Qualisys Sweden)Thecontrol points (cylinder and rod ends ends of levers and cen-ters of hinges connecting them)weremarked by 15mmdiam-eter spherical reflective markers (Figure 2) and the variationof their positions during exercising was recorded in real timemode by six computer-controlled 500Hz frequency infraredspectrum digital cameras Resistance force 119865
2 generated by
the HC type load generating unit was measured simultane-ously by means of the mobile multichannel system ldquoSpiderMobil-8rdquo (HBM Germany) with the 2500N capacity S9 typeforce sensor inserted between the hydraulic cylinder cap endand the frame (Figure 2)
In this way the dependency of resistance force 1198652gener-
ated by HC type load generating unit on the HC piston dis-placement and HC rodpiston displacement dependency ontime (thereby its speed) during the rod extraction caused bypulling the levers imitating oars handles was determined Anexperienced youth female rower (aged 22) practicing activelyfor more than 5 years took part in the investigation Warm-up was made at the beginning of each measurement thenmeasurements were performed with different resistance lev-els of the cylinder (1st 5th and 9th) set before exercising andat two different rates (normal and fast 24 and 30 cycles perminute resp) not less than 10 strokes for each combinationof parameters
The results of the investigation of the rowing machinekinematics and resistance force were compared with theresults of experimental research carried out earlier by theauthors of this paper [20 21] or described in [10 22ndash24]
The measurements of the kinematical parameters of therowing machine have shown that the stroke of the hydrauliccylinder approximately equals 170mm and practically doesnot depend on the selected resistance level and exercisingrate The maximal speed of HC rod extraction at the lowest(1st) resistance level is 022ms when exercising at a normalrate and near 03ms when exercising at a fast rate (in therecovery phase 03ms and 035ms resp) Research of therowing boat fixed in the pool described in [21] gave the speed
Computational and Mathematical Methods in Medicine 3
(1) Machine frame(2) Crosspiece with oars hinges at its ends
(3) L-shaped levers imitating oars(4) Hydraulic cylinders generating resistance
1
2 2
S
3 3
4 4
F1
L1
V2
L2
F2
V1
Figure 1 Structure of lever-type rowing machine and kinematical scheme of resistance system 119878 spread (scull) 1198711and 119871
2 lengths of L-
shaped levers imitating oar handles (119878 = 158m 1198711
= 074m and 1198712
= 0135m) 1198651 force on oar handle and 119865
2 resistance force generated
by hydraulic cylinder
Figure 2 Location of the markers of 3D Qualisys mocap system onthe rowingmachine andHBMS9 type force sensor inserted betweenthe hydraulic cylinder bottom end and the frame
of oar handle 15ms in the drive phase and 2ms in the recov-ery phase For a rowing machine having the L-shaped leverarms 119871
1and 119871
2ratio equal to 55 these parameters would
correspond to 027 and 036ms speed of the rodpistoninsertion respectively
The measurements of the HC resistance have shown thatin the drive phase of the stroke the law of change of theresistance force generated by the adjustable hydraulic cylin-der of the ldquoHAMMER Cobrardquo rowing machine (Figure 3) isof similar hydrodynamic character as the resistance force ofthe most popular rowing simulators Concept II [10] or Row-perfect [25] However it is not exactly the same as obtainedby measuring the rowing force when rowing a real boat [2023 24] inter alia depending on the position of the rower in
25 3 35 4 45 52Time (s)
minus100
300
700
1100
1500
Resis
tanc
e for
ce (N
)
Figure 3 The law of change of resistance force generated byhydraulic cylinder type load generating unit of HAMMER Cobrarowing machine during a single stroke cycle (exercising rate 24strokesmin resistance level 5)
a boat the stage of the race and other factors [26] The driveforce impulse curve is very smooth and almost symmetricalresistance in the recovery phase is near to zero (dozens ofnewtons) It should also be noted that due to the peculiaritiesof such type rowing simulator design the resistance forcepractically does not depend on the vertical position of the oarhandle In reality it corresponds to the depth of immersion ofthe oar blade into water which means that from this pointof view the lever-type rowing machine does not meet realrowing conditions
In the case of real rowing the force on the oar handlewas about 600N in the drive phase and 100N in the recovery
4 Computational and Mathematical Methods in Medicine
phase (male athletes) [20]Themaximal resistance force gen-erated by the hydraulic cylinder load generating unit (femaleathlete) was about 1100N at the first resistance level and1250N at the fifth resistance level When the ninth resistancelevel was set the attempts to exercise failed due to too highresistance force exceeding 1800N (at a lower exercising rate)If these forces are recalculated to the force on oar handleand the ratio of arms 119871
1and 119871
2of the L-shaped lever of
the rowing machine is considered 55 times lower resistancewill be received 210ndash330N peaks in the middle of thedrive phase and 10ndash20N almost during the whole recoveryphase (ie 2-3 times smaller than in the referenced case)
23 Resistance Force Generated by Linear Stroke HydraulicCylinder Type Load Generating Units In order to collectmore information about functionality of the HC type loadgenerating units used in lever-type rowing machines exper-imental research of their resistance force was carried out[27] The variation of resistance force size during the strokeof adjustable hydraulic cylinders taken from three rowingmachines was measured at different operating modes thespeed of rod extraction resistance level of the cylinder andthe temperature of the cylinder All the three cylinders wereof the same twin-tube design the diameter of their pistonswas 25mm external diameter 65mm and stroke sim275mmInvestigation showed that force characteristics of all the threeadjustable HCs apparently differ both qualitatively and quan-titatively the force curves are quite uneven (variation of theresistance force is up to 30 of the nominal value at constantvelocity of the piston) and the nominal resistance force size isdifferent even when the same resistance level (1stndash12th) is setbefore exercising Thus even if the design and kinematics ofall rowingmachines seem to be very similar the resistance onthe oar handle may be quite different for different exerciserseven at the same resistance level set by the adjustment ringTherefore it is important to use a proper cylinder whenreplacing either a broken or a worn one or both cylindersshould be replaced to ensure the symmetry of resistance
In parallel with the research described above the depen-dency of resistance force of the HC type load generatingunits on their body temperature has been investigated takinginto account its evident rise during exercising The resistancecharacteristics and the temperature of the cylinder bodywere measured every 100 cycles of exercising by means ofa universal computerized two-column desktop machine fortesting materialsrsquo mechanical properties ldquoH25KTrdquo (TiniusOlsen USA) equippedwith the force sensorHTE-1000N andcontrolled by the ldquoQMATrdquo software HC body temperaturewas measured by an infrared (IR) thermometer ldquoTesto 845rdquo(Testo Inc USA)When rowing at the rate of 50 strokesminthe temperature of hydraulic cylinder number 1 body reached76∘C after 1400 strokes and the temperature of hydrauliccylinder number 2 63∘C (Figure 4) which caused a cor-responding drop of the resistance force For example theresistance force of hydraulic cylinder number 1 decreasedfrom 450N at 20∘C temperature down to 150N as it heatedup to 55∘C (Figure 5) These facts allow us to state thateven at relatively low exercising intensity the resistance levelof the hydraulic cylinder should be periodically adjusted
Number 1
Number 2
0
25
50
75
100
Tem
pera
ture
(∘C)
350 700 1050 14000Number of strokes
Figure 4 Dependencies of the temperature of hydraulic cylindernumbers 1 and 2 on the number of exercise cycles (exercising rate50 strokesmin)
0
100
200
300
400
500
0 55 110 165 220
Resis
tanc
e for
ce (N
)
Displacement (mm)
55∘C
50∘C
45∘C
40∘C
35∘C
30∘C
25∘C
20∘C
Figure 5 Dependencies of the resistance force generated byhydraulic cylinder number 2 on its body temperature (speed ofrodpiston extraction 0015ms)
(increased) in order to maintain constant resistance duringthe whole exercising process
Thus the study of a rowing machine real rowing kine-matics and the resistance force gave the information aboutthe range and characteristics of the resistance force and HCpistonrod speed that should be ensured to make the law ofresistance force adequate for real rowing
The research of dynamic characteristics of HC type loadgenerating units used in lever-type rowing machines alsoallows us to conclude that several essential deficiencies aretypical to such devices (and the machines where they areused)
(i) Stability of the resistance force at a constant speed ofthe rodpiston extraction is not ensured
(ii) The size of resistance force depends significantly onthe HC temperature increasing with the number ofexercise cycles that requires periodical adjustment ofthe load generating unit during exercising
Computational and Mathematical Methods in Medicine 5
(iii) The similarity of the law of resistance force variationto the resistance obtained during real rowing is onlyqualitative some factors (like depth of oar immersioninto water) are neglected
(iv) There is no possibility to control the resistance forceduring an exercise cycle
To eliminate the above-mentioned deficiencies of regularlever-type rowing machines equipped with the (manually)adjustable HC type load generating units these units shouldbe replaced by controllable (during stroke or sequence ofstrokes) resistive exercise devices for example based onmagnetorheological fluid technology
3 Methods of Solution
To improve a rowing machine so that it would better cor-respond to real rowing it is enough to replace its regularHC type load generating units by controllable (during stroke)resistive exercise devices Such devices should generate resis-tance dependent not only on the exercising rate and conse-quently the speed of pulling oar handles but also on variouskinematic-dynamic parameters characterizing the run ofeach rowing stroke or even the sequence of strokes (if simu-lation of different training modes or competition is desired)These parameters should be measured by the set of sensors(vertical and horizontal position and angular velocities oflevers simulating oars resistance force etc) integrated with aprogrammable control system adjusting the resistive exercisedevicesThemagnetorheological fluid technology seems to bemost easily implemented for this type ofmachinery with suchfunctional parameters The control of resistance force gener-ated by such a device is ensured by controlling the viscosityof the MR fluid circulating within it by means of a magneticfield The more viscous the fluid the larger the resistance toits flow what in the case of a hydraulic cylinder type devicewhere the fluid flows between the chambers separated bythe movable piston may be related to the speed of pistonrod insertionextraction under the effect of external force
Development of such peculiar devices is hardly imag-inable without application of computer aided technologiesnamely computational fluid dynamic (CFD) especially in thecase of application of smart materials such asMR fluids hav-ing very specific material properties Thus the first problemthat arose after the decision was made to develop a hydrauliccylinder type controllable resistive exercise device based onMR fluid technology proper description of such fluid prop-erties being definitely non-Newtonian It is related to the lackof information about dependencies of commercially availableMR fluid properties on the strength of the magnetic fieldAfter this problem was solved as described in Section 31themagnetorheological resistive exercise devicewas designedand its parameters ensuring the necessary range of the resis-tance force were determined as shown in Section 32 Finallythe law of change of themagnetic field acting on theMR fluidwithin the magnetorheological resistive exercise device wasderived which ensures the law of variation of the resistanceforce adequate for the resistance force on the oar handlewhen rowing a real boat (Section 34)
31 Parameters of Non-Newtonian Model of the Magnetorhe-ological Fluid MR fluids are non-Newtonian that is theirrelationship between the shear stress and shear strain rateis not simply linear ANSYS CFX software used during thisresearch has several models for calculating viscosity basedon shear strain rate [28] Among them the Herschel-Bulkleymathematical model for viscoplastic fluids appears to be themost suitable when the MR fluid MRF140-CG (Lord USA[29]) is applied in the device to be designed [30] To describethe dynamical viscosity of such fluids by this mathematicalmodel two specific parameters are required viscosity consis-tency 119870 and yield stress 120591
119884of the fluid both dependent on
the strength of the magnetic field acting on the fluid
120583 =120591119884
(120582)+ 119870 sdot (120582)
119899minus1
(1)
where119870 is viscosity consistency (Pasdots119899) defining viscosity of afluid 119899 is linear power law index of the fluid 120591
119884is yield stress
of the fluid (Pa) is gradient of shear velocity (or shear strainrate) (1s) and 120582 is time constant
The yield stress 120591119884dependency on the strength of the
magnetic field for MR fluid MRF140-CG is presented by itsmanufacturer [29] while the effect of the magnetic field onviscosity consistency 119870 is not specified thus this is the onlyunknown factor that should be found to describe physicalproperties of MR fluid adequately
For this purpose a computer aided simulation of an orig-inal designMR damper manufactured at KTU (Figure 6) wascarried out using the results of experimental investigation ofits resistance force when operating at different modes as ref-erence data [31] The main structural parameters of a single-acting twin-tube hydraulic cylinder type MR damper are asfollows piston (and inner tube internal) diameter 13mminner tube external diameter 165mm piston rod diameter6mm stroke 44mm and outer tube internalexternal diam-eters 25420mm
At first a 3D geometrical model of the MR damperand a computational finite element model of computationaldomain corresponding to its cavities filled with MR fluid(Figure 7) were created The finite element mesh consistedof sim390000 003ndash63mm size volume elements (the meshwas refined in the zones of outlet areas and narrowestchannels of the base valve) Then the numerical simulationof MR damper operation was performed by using ANSYSCFX CFD code During the simulation the resistance forcegenerated by the MR damper resulting from the pressureacting on piston 6 moving inside cylinder 2 was found fordifferent combinations of piston 6 speeds (0001 0002 00350005 and 00075ms) and the strength of the magnetic fieldgenerated by magnetic coil 7 (0 13 25 and 38mT) affectingthe MR fluid in the zone of magnetorheological base valve4 Computations were performed by specifying the inletvelocity of the fluid at the round surface corresponding to theend of the piston (larger circle in themiddle of computationaldomain (Figure 7(a))) and the outlet to the nonpressur-ized environment via four circular openings connecting therebound chamber inside the inner tube with the tubularchannel between inner and outer tubes (four smaller circlesat the left end of computational domain (Figure 7(a))) For
6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 3
(1) Machine frame(2) Crosspiece with oars hinges at its ends
(3) L-shaped levers imitating oars(4) Hydraulic cylinders generating resistance
1
2 2
S
3 3
4 4
F1
L1
V2
L2
F2
V1
Figure 1 Structure of lever-type rowing machine and kinematical scheme of resistance system 119878 spread (scull) 1198711and 119871
2 lengths of L-
shaped levers imitating oar handles (119878 = 158m 1198711
= 074m and 1198712
= 0135m) 1198651 force on oar handle and 119865
2 resistance force generated
by hydraulic cylinder
Figure 2 Location of the markers of 3D Qualisys mocap system onthe rowingmachine andHBMS9 type force sensor inserted betweenthe hydraulic cylinder bottom end and the frame
of oar handle 15ms in the drive phase and 2ms in the recov-ery phase For a rowing machine having the L-shaped leverarms 119871
1and 119871
2ratio equal to 55 these parameters would
correspond to 027 and 036ms speed of the rodpistoninsertion respectively
The measurements of the HC resistance have shown thatin the drive phase of the stroke the law of change of theresistance force generated by the adjustable hydraulic cylin-der of the ldquoHAMMER Cobrardquo rowing machine (Figure 3) isof similar hydrodynamic character as the resistance force ofthe most popular rowing simulators Concept II [10] or Row-perfect [25] However it is not exactly the same as obtainedby measuring the rowing force when rowing a real boat [2023 24] inter alia depending on the position of the rower in
25 3 35 4 45 52Time (s)
minus100
300
700
1100
1500
Resis
tanc
e for
ce (N
)
Figure 3 The law of change of resistance force generated byhydraulic cylinder type load generating unit of HAMMER Cobrarowing machine during a single stroke cycle (exercising rate 24strokesmin resistance level 5)
a boat the stage of the race and other factors [26] The driveforce impulse curve is very smooth and almost symmetricalresistance in the recovery phase is near to zero (dozens ofnewtons) It should also be noted that due to the peculiaritiesof such type rowing simulator design the resistance forcepractically does not depend on the vertical position of the oarhandle In reality it corresponds to the depth of immersion ofthe oar blade into water which means that from this pointof view the lever-type rowing machine does not meet realrowing conditions
In the case of real rowing the force on the oar handlewas about 600N in the drive phase and 100N in the recovery
4 Computational and Mathematical Methods in Medicine
phase (male athletes) [20]Themaximal resistance force gen-erated by the hydraulic cylinder load generating unit (femaleathlete) was about 1100N at the first resistance level and1250N at the fifth resistance level When the ninth resistancelevel was set the attempts to exercise failed due to too highresistance force exceeding 1800N (at a lower exercising rate)If these forces are recalculated to the force on oar handleand the ratio of arms 119871
1and 119871
2of the L-shaped lever of
the rowing machine is considered 55 times lower resistancewill be received 210ndash330N peaks in the middle of thedrive phase and 10ndash20N almost during the whole recoveryphase (ie 2-3 times smaller than in the referenced case)
23 Resistance Force Generated by Linear Stroke HydraulicCylinder Type Load Generating Units In order to collectmore information about functionality of the HC type loadgenerating units used in lever-type rowing machines exper-imental research of their resistance force was carried out[27] The variation of resistance force size during the strokeof adjustable hydraulic cylinders taken from three rowingmachines was measured at different operating modes thespeed of rod extraction resistance level of the cylinder andthe temperature of the cylinder All the three cylinders wereof the same twin-tube design the diameter of their pistonswas 25mm external diameter 65mm and stroke sim275mmInvestigation showed that force characteristics of all the threeadjustable HCs apparently differ both qualitatively and quan-titatively the force curves are quite uneven (variation of theresistance force is up to 30 of the nominal value at constantvelocity of the piston) and the nominal resistance force size isdifferent even when the same resistance level (1stndash12th) is setbefore exercising Thus even if the design and kinematics ofall rowingmachines seem to be very similar the resistance onthe oar handle may be quite different for different exerciserseven at the same resistance level set by the adjustment ringTherefore it is important to use a proper cylinder whenreplacing either a broken or a worn one or both cylindersshould be replaced to ensure the symmetry of resistance
In parallel with the research described above the depen-dency of resistance force of the HC type load generatingunits on their body temperature has been investigated takinginto account its evident rise during exercising The resistancecharacteristics and the temperature of the cylinder bodywere measured every 100 cycles of exercising by means ofa universal computerized two-column desktop machine fortesting materialsrsquo mechanical properties ldquoH25KTrdquo (TiniusOlsen USA) equippedwith the force sensorHTE-1000N andcontrolled by the ldquoQMATrdquo software HC body temperaturewas measured by an infrared (IR) thermometer ldquoTesto 845rdquo(Testo Inc USA)When rowing at the rate of 50 strokesminthe temperature of hydraulic cylinder number 1 body reached76∘C after 1400 strokes and the temperature of hydrauliccylinder number 2 63∘C (Figure 4) which caused a cor-responding drop of the resistance force For example theresistance force of hydraulic cylinder number 1 decreasedfrom 450N at 20∘C temperature down to 150N as it heatedup to 55∘C (Figure 5) These facts allow us to state thateven at relatively low exercising intensity the resistance levelof the hydraulic cylinder should be periodically adjusted
Number 1
Number 2
0
25
50
75
100
Tem
pera
ture
(∘C)
350 700 1050 14000Number of strokes
Figure 4 Dependencies of the temperature of hydraulic cylindernumbers 1 and 2 on the number of exercise cycles (exercising rate50 strokesmin)
0
100
200
300
400
500
0 55 110 165 220
Resis
tanc
e for
ce (N
)
Displacement (mm)
55∘C
50∘C
45∘C
40∘C
35∘C
30∘C
25∘C
20∘C
Figure 5 Dependencies of the resistance force generated byhydraulic cylinder number 2 on its body temperature (speed ofrodpiston extraction 0015ms)
(increased) in order to maintain constant resistance duringthe whole exercising process
Thus the study of a rowing machine real rowing kine-matics and the resistance force gave the information aboutthe range and characteristics of the resistance force and HCpistonrod speed that should be ensured to make the law ofresistance force adequate for real rowing
The research of dynamic characteristics of HC type loadgenerating units used in lever-type rowing machines alsoallows us to conclude that several essential deficiencies aretypical to such devices (and the machines where they areused)
(i) Stability of the resistance force at a constant speed ofthe rodpiston extraction is not ensured
(ii) The size of resistance force depends significantly onthe HC temperature increasing with the number ofexercise cycles that requires periodical adjustment ofthe load generating unit during exercising
Computational and Mathematical Methods in Medicine 5
(iii) The similarity of the law of resistance force variationto the resistance obtained during real rowing is onlyqualitative some factors (like depth of oar immersioninto water) are neglected
(iv) There is no possibility to control the resistance forceduring an exercise cycle
To eliminate the above-mentioned deficiencies of regularlever-type rowing machines equipped with the (manually)adjustable HC type load generating units these units shouldbe replaced by controllable (during stroke or sequence ofstrokes) resistive exercise devices for example based onmagnetorheological fluid technology
3 Methods of Solution
To improve a rowing machine so that it would better cor-respond to real rowing it is enough to replace its regularHC type load generating units by controllable (during stroke)resistive exercise devices Such devices should generate resis-tance dependent not only on the exercising rate and conse-quently the speed of pulling oar handles but also on variouskinematic-dynamic parameters characterizing the run ofeach rowing stroke or even the sequence of strokes (if simu-lation of different training modes or competition is desired)These parameters should be measured by the set of sensors(vertical and horizontal position and angular velocities oflevers simulating oars resistance force etc) integrated with aprogrammable control system adjusting the resistive exercisedevicesThemagnetorheological fluid technology seems to bemost easily implemented for this type ofmachinery with suchfunctional parameters The control of resistance force gener-ated by such a device is ensured by controlling the viscosityof the MR fluid circulating within it by means of a magneticfield The more viscous the fluid the larger the resistance toits flow what in the case of a hydraulic cylinder type devicewhere the fluid flows between the chambers separated bythe movable piston may be related to the speed of pistonrod insertionextraction under the effect of external force
Development of such peculiar devices is hardly imag-inable without application of computer aided technologiesnamely computational fluid dynamic (CFD) especially in thecase of application of smart materials such asMR fluids hav-ing very specific material properties Thus the first problemthat arose after the decision was made to develop a hydrauliccylinder type controllable resistive exercise device based onMR fluid technology proper description of such fluid prop-erties being definitely non-Newtonian It is related to the lackof information about dependencies of commercially availableMR fluid properties on the strength of the magnetic fieldAfter this problem was solved as described in Section 31themagnetorheological resistive exercise devicewas designedand its parameters ensuring the necessary range of the resis-tance force were determined as shown in Section 32 Finallythe law of change of themagnetic field acting on theMR fluidwithin the magnetorheological resistive exercise device wasderived which ensures the law of variation of the resistanceforce adequate for the resistance force on the oar handlewhen rowing a real boat (Section 34)
31 Parameters of Non-Newtonian Model of the Magnetorhe-ological Fluid MR fluids are non-Newtonian that is theirrelationship between the shear stress and shear strain rateis not simply linear ANSYS CFX software used during thisresearch has several models for calculating viscosity basedon shear strain rate [28] Among them the Herschel-Bulkleymathematical model for viscoplastic fluids appears to be themost suitable when the MR fluid MRF140-CG (Lord USA[29]) is applied in the device to be designed [30] To describethe dynamical viscosity of such fluids by this mathematicalmodel two specific parameters are required viscosity consis-tency 119870 and yield stress 120591
119884of the fluid both dependent on
the strength of the magnetic field acting on the fluid
120583 =120591119884
(120582)+ 119870 sdot (120582)
119899minus1
(1)
where119870 is viscosity consistency (Pasdots119899) defining viscosity of afluid 119899 is linear power law index of the fluid 120591
119884is yield stress
of the fluid (Pa) is gradient of shear velocity (or shear strainrate) (1s) and 120582 is time constant
The yield stress 120591119884dependency on the strength of the
magnetic field for MR fluid MRF140-CG is presented by itsmanufacturer [29] while the effect of the magnetic field onviscosity consistency 119870 is not specified thus this is the onlyunknown factor that should be found to describe physicalproperties of MR fluid adequately
For this purpose a computer aided simulation of an orig-inal designMR damper manufactured at KTU (Figure 6) wascarried out using the results of experimental investigation ofits resistance force when operating at different modes as ref-erence data [31] The main structural parameters of a single-acting twin-tube hydraulic cylinder type MR damper are asfollows piston (and inner tube internal) diameter 13mminner tube external diameter 165mm piston rod diameter6mm stroke 44mm and outer tube internalexternal diam-eters 25420mm
At first a 3D geometrical model of the MR damperand a computational finite element model of computationaldomain corresponding to its cavities filled with MR fluid(Figure 7) were created The finite element mesh consistedof sim390000 003ndash63mm size volume elements (the meshwas refined in the zones of outlet areas and narrowestchannels of the base valve) Then the numerical simulationof MR damper operation was performed by using ANSYSCFX CFD code During the simulation the resistance forcegenerated by the MR damper resulting from the pressureacting on piston 6 moving inside cylinder 2 was found fordifferent combinations of piston 6 speeds (0001 0002 00350005 and 00075ms) and the strength of the magnetic fieldgenerated by magnetic coil 7 (0 13 25 and 38mT) affectingthe MR fluid in the zone of magnetorheological base valve4 Computations were performed by specifying the inletvelocity of the fluid at the round surface corresponding to theend of the piston (larger circle in themiddle of computationaldomain (Figure 7(a))) and the outlet to the nonpressur-ized environment via four circular openings connecting therebound chamber inside the inner tube with the tubularchannel between inner and outer tubes (four smaller circlesat the left end of computational domain (Figure 7(a))) For
6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

4 Computational and Mathematical Methods in Medicine
phase (male athletes) [20]Themaximal resistance force gen-erated by the hydraulic cylinder load generating unit (femaleathlete) was about 1100N at the first resistance level and1250N at the fifth resistance level When the ninth resistancelevel was set the attempts to exercise failed due to too highresistance force exceeding 1800N (at a lower exercising rate)If these forces are recalculated to the force on oar handleand the ratio of arms 119871
1and 119871
2of the L-shaped lever of
the rowing machine is considered 55 times lower resistancewill be received 210ndash330N peaks in the middle of thedrive phase and 10ndash20N almost during the whole recoveryphase (ie 2-3 times smaller than in the referenced case)
23 Resistance Force Generated by Linear Stroke HydraulicCylinder Type Load Generating Units In order to collectmore information about functionality of the HC type loadgenerating units used in lever-type rowing machines exper-imental research of their resistance force was carried out[27] The variation of resistance force size during the strokeof adjustable hydraulic cylinders taken from three rowingmachines was measured at different operating modes thespeed of rod extraction resistance level of the cylinder andthe temperature of the cylinder All the three cylinders wereof the same twin-tube design the diameter of their pistonswas 25mm external diameter 65mm and stroke sim275mmInvestigation showed that force characteristics of all the threeadjustable HCs apparently differ both qualitatively and quan-titatively the force curves are quite uneven (variation of theresistance force is up to 30 of the nominal value at constantvelocity of the piston) and the nominal resistance force size isdifferent even when the same resistance level (1stndash12th) is setbefore exercising Thus even if the design and kinematics ofall rowingmachines seem to be very similar the resistance onthe oar handle may be quite different for different exerciserseven at the same resistance level set by the adjustment ringTherefore it is important to use a proper cylinder whenreplacing either a broken or a worn one or both cylindersshould be replaced to ensure the symmetry of resistance
In parallel with the research described above the depen-dency of resistance force of the HC type load generatingunits on their body temperature has been investigated takinginto account its evident rise during exercising The resistancecharacteristics and the temperature of the cylinder bodywere measured every 100 cycles of exercising by means ofa universal computerized two-column desktop machine fortesting materialsrsquo mechanical properties ldquoH25KTrdquo (TiniusOlsen USA) equippedwith the force sensorHTE-1000N andcontrolled by the ldquoQMATrdquo software HC body temperaturewas measured by an infrared (IR) thermometer ldquoTesto 845rdquo(Testo Inc USA)When rowing at the rate of 50 strokesminthe temperature of hydraulic cylinder number 1 body reached76∘C after 1400 strokes and the temperature of hydrauliccylinder number 2 63∘C (Figure 4) which caused a cor-responding drop of the resistance force For example theresistance force of hydraulic cylinder number 1 decreasedfrom 450N at 20∘C temperature down to 150N as it heatedup to 55∘C (Figure 5) These facts allow us to state thateven at relatively low exercising intensity the resistance levelof the hydraulic cylinder should be periodically adjusted
Number 1
Number 2
0
25
50
75
100
Tem
pera
ture
(∘C)
350 700 1050 14000Number of strokes
Figure 4 Dependencies of the temperature of hydraulic cylindernumbers 1 and 2 on the number of exercise cycles (exercising rate50 strokesmin)
0
100
200
300
400
500
0 55 110 165 220
Resis
tanc
e for
ce (N
)
Displacement (mm)
55∘C
50∘C
45∘C
40∘C
35∘C
30∘C
25∘C
20∘C
Figure 5 Dependencies of the resistance force generated byhydraulic cylinder number 2 on its body temperature (speed ofrodpiston extraction 0015ms)
(increased) in order to maintain constant resistance duringthe whole exercising process
Thus the study of a rowing machine real rowing kine-matics and the resistance force gave the information aboutthe range and characteristics of the resistance force and HCpistonrod speed that should be ensured to make the law ofresistance force adequate for real rowing
The research of dynamic characteristics of HC type loadgenerating units used in lever-type rowing machines alsoallows us to conclude that several essential deficiencies aretypical to such devices (and the machines where they areused)
(i) Stability of the resistance force at a constant speed ofthe rodpiston extraction is not ensured
(ii) The size of resistance force depends significantly onthe HC temperature increasing with the number ofexercise cycles that requires periodical adjustment ofthe load generating unit during exercising
Computational and Mathematical Methods in Medicine 5
(iii) The similarity of the law of resistance force variationto the resistance obtained during real rowing is onlyqualitative some factors (like depth of oar immersioninto water) are neglected
(iv) There is no possibility to control the resistance forceduring an exercise cycle
To eliminate the above-mentioned deficiencies of regularlever-type rowing machines equipped with the (manually)adjustable HC type load generating units these units shouldbe replaced by controllable (during stroke or sequence ofstrokes) resistive exercise devices for example based onmagnetorheological fluid technology
3 Methods of Solution
To improve a rowing machine so that it would better cor-respond to real rowing it is enough to replace its regularHC type load generating units by controllable (during stroke)resistive exercise devices Such devices should generate resis-tance dependent not only on the exercising rate and conse-quently the speed of pulling oar handles but also on variouskinematic-dynamic parameters characterizing the run ofeach rowing stroke or even the sequence of strokes (if simu-lation of different training modes or competition is desired)These parameters should be measured by the set of sensors(vertical and horizontal position and angular velocities oflevers simulating oars resistance force etc) integrated with aprogrammable control system adjusting the resistive exercisedevicesThemagnetorheological fluid technology seems to bemost easily implemented for this type ofmachinery with suchfunctional parameters The control of resistance force gener-ated by such a device is ensured by controlling the viscosityof the MR fluid circulating within it by means of a magneticfield The more viscous the fluid the larger the resistance toits flow what in the case of a hydraulic cylinder type devicewhere the fluid flows between the chambers separated bythe movable piston may be related to the speed of pistonrod insertionextraction under the effect of external force
Development of such peculiar devices is hardly imag-inable without application of computer aided technologiesnamely computational fluid dynamic (CFD) especially in thecase of application of smart materials such asMR fluids hav-ing very specific material properties Thus the first problemthat arose after the decision was made to develop a hydrauliccylinder type controllable resistive exercise device based onMR fluid technology proper description of such fluid prop-erties being definitely non-Newtonian It is related to the lackof information about dependencies of commercially availableMR fluid properties on the strength of the magnetic fieldAfter this problem was solved as described in Section 31themagnetorheological resistive exercise devicewas designedand its parameters ensuring the necessary range of the resis-tance force were determined as shown in Section 32 Finallythe law of change of themagnetic field acting on theMR fluidwithin the magnetorheological resistive exercise device wasderived which ensures the law of variation of the resistanceforce adequate for the resistance force on the oar handlewhen rowing a real boat (Section 34)
31 Parameters of Non-Newtonian Model of the Magnetorhe-ological Fluid MR fluids are non-Newtonian that is theirrelationship between the shear stress and shear strain rateis not simply linear ANSYS CFX software used during thisresearch has several models for calculating viscosity basedon shear strain rate [28] Among them the Herschel-Bulkleymathematical model for viscoplastic fluids appears to be themost suitable when the MR fluid MRF140-CG (Lord USA[29]) is applied in the device to be designed [30] To describethe dynamical viscosity of such fluids by this mathematicalmodel two specific parameters are required viscosity consis-tency 119870 and yield stress 120591
119884of the fluid both dependent on
the strength of the magnetic field acting on the fluid
120583 =120591119884
(120582)+ 119870 sdot (120582)
119899minus1
(1)
where119870 is viscosity consistency (Pasdots119899) defining viscosity of afluid 119899 is linear power law index of the fluid 120591
119884is yield stress
of the fluid (Pa) is gradient of shear velocity (or shear strainrate) (1s) and 120582 is time constant
The yield stress 120591119884dependency on the strength of the
magnetic field for MR fluid MRF140-CG is presented by itsmanufacturer [29] while the effect of the magnetic field onviscosity consistency 119870 is not specified thus this is the onlyunknown factor that should be found to describe physicalproperties of MR fluid adequately
For this purpose a computer aided simulation of an orig-inal designMR damper manufactured at KTU (Figure 6) wascarried out using the results of experimental investigation ofits resistance force when operating at different modes as ref-erence data [31] The main structural parameters of a single-acting twin-tube hydraulic cylinder type MR damper are asfollows piston (and inner tube internal) diameter 13mminner tube external diameter 165mm piston rod diameter6mm stroke 44mm and outer tube internalexternal diam-eters 25420mm
At first a 3D geometrical model of the MR damperand a computational finite element model of computationaldomain corresponding to its cavities filled with MR fluid(Figure 7) were created The finite element mesh consistedof sim390000 003ndash63mm size volume elements (the meshwas refined in the zones of outlet areas and narrowestchannels of the base valve) Then the numerical simulationof MR damper operation was performed by using ANSYSCFX CFD code During the simulation the resistance forcegenerated by the MR damper resulting from the pressureacting on piston 6 moving inside cylinder 2 was found fordifferent combinations of piston 6 speeds (0001 0002 00350005 and 00075ms) and the strength of the magnetic fieldgenerated by magnetic coil 7 (0 13 25 and 38mT) affectingthe MR fluid in the zone of magnetorheological base valve4 Computations were performed by specifying the inletvelocity of the fluid at the round surface corresponding to theend of the piston (larger circle in themiddle of computationaldomain (Figure 7(a))) and the outlet to the nonpressur-ized environment via four circular openings connecting therebound chamber inside the inner tube with the tubularchannel between inner and outer tubes (four smaller circlesat the left end of computational domain (Figure 7(a))) For
6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 5
(iii) The similarity of the law of resistance force variationto the resistance obtained during real rowing is onlyqualitative some factors (like depth of oar immersioninto water) are neglected
(iv) There is no possibility to control the resistance forceduring an exercise cycle
To eliminate the above-mentioned deficiencies of regularlever-type rowing machines equipped with the (manually)adjustable HC type load generating units these units shouldbe replaced by controllable (during stroke or sequence ofstrokes) resistive exercise devices for example based onmagnetorheological fluid technology
3 Methods of Solution
To improve a rowing machine so that it would better cor-respond to real rowing it is enough to replace its regularHC type load generating units by controllable (during stroke)resistive exercise devices Such devices should generate resis-tance dependent not only on the exercising rate and conse-quently the speed of pulling oar handles but also on variouskinematic-dynamic parameters characterizing the run ofeach rowing stroke or even the sequence of strokes (if simu-lation of different training modes or competition is desired)These parameters should be measured by the set of sensors(vertical and horizontal position and angular velocities oflevers simulating oars resistance force etc) integrated with aprogrammable control system adjusting the resistive exercisedevicesThemagnetorheological fluid technology seems to bemost easily implemented for this type ofmachinery with suchfunctional parameters The control of resistance force gener-ated by such a device is ensured by controlling the viscosityof the MR fluid circulating within it by means of a magneticfield The more viscous the fluid the larger the resistance toits flow what in the case of a hydraulic cylinder type devicewhere the fluid flows between the chambers separated bythe movable piston may be related to the speed of pistonrod insertionextraction under the effect of external force
Development of such peculiar devices is hardly imag-inable without application of computer aided technologiesnamely computational fluid dynamic (CFD) especially in thecase of application of smart materials such asMR fluids hav-ing very specific material properties Thus the first problemthat arose after the decision was made to develop a hydrauliccylinder type controllable resistive exercise device based onMR fluid technology proper description of such fluid prop-erties being definitely non-Newtonian It is related to the lackof information about dependencies of commercially availableMR fluid properties on the strength of the magnetic fieldAfter this problem was solved as described in Section 31themagnetorheological resistive exercise devicewas designedand its parameters ensuring the necessary range of the resis-tance force were determined as shown in Section 32 Finallythe law of change of themagnetic field acting on theMR fluidwithin the magnetorheological resistive exercise device wasderived which ensures the law of variation of the resistanceforce adequate for the resistance force on the oar handlewhen rowing a real boat (Section 34)
31 Parameters of Non-Newtonian Model of the Magnetorhe-ological Fluid MR fluids are non-Newtonian that is theirrelationship between the shear stress and shear strain rateis not simply linear ANSYS CFX software used during thisresearch has several models for calculating viscosity basedon shear strain rate [28] Among them the Herschel-Bulkleymathematical model for viscoplastic fluids appears to be themost suitable when the MR fluid MRF140-CG (Lord USA[29]) is applied in the device to be designed [30] To describethe dynamical viscosity of such fluids by this mathematicalmodel two specific parameters are required viscosity consis-tency 119870 and yield stress 120591
119884of the fluid both dependent on
the strength of the magnetic field acting on the fluid
120583 =120591119884
(120582)+ 119870 sdot (120582)
119899minus1
(1)
where119870 is viscosity consistency (Pasdots119899) defining viscosity of afluid 119899 is linear power law index of the fluid 120591
119884is yield stress
of the fluid (Pa) is gradient of shear velocity (or shear strainrate) (1s) and 120582 is time constant
The yield stress 120591119884dependency on the strength of the
magnetic field for MR fluid MRF140-CG is presented by itsmanufacturer [29] while the effect of the magnetic field onviscosity consistency 119870 is not specified thus this is the onlyunknown factor that should be found to describe physicalproperties of MR fluid adequately
For this purpose a computer aided simulation of an orig-inal designMR damper manufactured at KTU (Figure 6) wascarried out using the results of experimental investigation ofits resistance force when operating at different modes as ref-erence data [31] The main structural parameters of a single-acting twin-tube hydraulic cylinder type MR damper are asfollows piston (and inner tube internal) diameter 13mminner tube external diameter 165mm piston rod diameter6mm stroke 44mm and outer tube internalexternal diam-eters 25420mm
At first a 3D geometrical model of the MR damperand a computational finite element model of computationaldomain corresponding to its cavities filled with MR fluid(Figure 7) were created The finite element mesh consistedof sim390000 003ndash63mm size volume elements (the meshwas refined in the zones of outlet areas and narrowestchannels of the base valve) Then the numerical simulationof MR damper operation was performed by using ANSYSCFX CFD code During the simulation the resistance forcegenerated by the MR damper resulting from the pressureacting on piston 6 moving inside cylinder 2 was found fordifferent combinations of piston 6 speeds (0001 0002 00350005 and 00075ms) and the strength of the magnetic fieldgenerated by magnetic coil 7 (0 13 25 and 38mT) affectingthe MR fluid in the zone of magnetorheological base valve4 Computations were performed by specifying the inletvelocity of the fluid at the round surface corresponding to theend of the piston (larger circle in themiddle of computationaldomain (Figure 7(a))) and the outlet to the nonpressur-ized environment via four circular openings connecting therebound chamber inside the inner tube with the tubularchannel between inner and outer tubes (four smaller circlesat the left end of computational domain (Figure 7(a))) For
6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

6 Computational and Mathematical Methods in Medicine
123
4
5
(1) Cylinder barrel (outer tube) with the cap end and base mount(2) Inner tube(3) Rod head with the rod guide and seal(4) Base valve (magnetorheological) bushing(5) Centering ring
(6) Rod with the piston and mount(7) Magnetic induction coil(8) Rebound chamber(9) Compression chamber
(10) Spring-suspended expansion tank
6
78 9
10
~U
Figure 6 MR damper section view
(a) (b)
Figure 7 Models of MR fluid damper (a) computational domain with boundary conditions indicated (b) finite element mesh ofcomputational domain (sim390000 volume elements)
simplification reasons the effect of the magnetic field wasevaluated by specifying corresponding values of the viscosityconsistency 119870 and yield stress 120591
119884to the whole computational
domain containing MR fluid though its main effect occursin the zone of maximal gradient of the flow velocitiesnamely in the magnetorheological base valve 4 It is made asbushing with two narrow channels (1 times 1mm2 cross section)where the fluid flows with maximal speed from compressionchamber 9 to rebound chamber 8 thereby being affected bythe magnetic field generated by magnetic coil 7 (Figure 6)
Two states of the MR fluid corresponding to the MRdamper operation in passive and activemodes were evaluatedduring the analysis In the first case the MR fluid MRF140-CG was described as Newtonian and in the second as non-NewtonianThemain physical properties of theMR fluid (forboth Newtonian and non-Newtonian models) are presentedin Table 1
In the second case a series of computations with differentvalues of viscosity consistency 119870 were carried out until thesatisfactory adequacy of the average resistance force caused
Table 1 Main physical properties of MR fluid MRF-140CG
Physical property Newtonian Non-NewtonianDensity kgm3 3640 3640Specific heat J(kgsdotK) 800 800Thermal conductivity W(msdotK) 23 23
Dynamical viscosity Pasdots 028According to
Herschel-Bulkleymodel
Power law index mdash 08Minimal shear strain rate 1s mdash 100Maximal shear strain rate 1s mdash 800Time constant s mdash 5
by the pressure of the MR fluid acting on the piston to theresults of the experimental measurements mentioned above[31] was reached for all the three cases of the magnetic field
Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 7
strength and for five speeds of pistonmovement (or fluid inletvelocity)
32 Computational Analysis of MR Fluid Based DevicesNon-Newtonian behavior of the fluid circulating in the MRdamper cavities is simulated by switching on the dynamicviscosity option in ANSYS CFX preprocessor material prop-erties description window Then the selection of the fluidmodel and viscosity model is performed which makes itpossible to specify four main parameters describing MRfluid MRF140-CG as non-Newtonian (Hershel-Bulkley typedescribed by (1)) power law index shear strain rate (or shearvelocity) yield stress and viscosity consistency
The hydrodynamic force acting on the piston is obtainedby integrating fluid pressure acting on the piston end surfacewhich in turn is obtained by solving a typical set of unsteadyNavier-Stokes equations in their conservation form (continu-ity momentum energy pressure and turbulence) describinga single-phase single-domain steady state incompressiblefluid flow problem It is defined by the laws of conservation ofmass momentum and energy expressed in terms of partialdifferential equations which are discretized with a finiteelement based technique used in computational fluid dynam-ics code ANSYS CFX [32]
321 Transport Equations [32] The instantaneous equationsof mass momentum and energy conservation can be writtenas follows in a stationary frame (the symbol description isthe following 119880 is velocity magnitude 119880 is vector of velocity119880119909119910119911
119888119901is specific heat capacity at constant pressure ℎ
is specific static (thermodynamic) enthalpy ℎtot is specifictotal enthalpy 120591 is shear stress 119901 is static (thermodynamic)pressure 119878
119872is momentum source 119878
119864is energy source 119879 is
static (thermodynamic) temperature 120588 is density 120575 is identitymatrix 120583 is molecular (dynamic) viscosity and 120582 is thermalconductivity)
The continuity equation is
120597120588
120597119905+ nabla sdot (120588119880) = 0 (2)
The momentum equation is
120597 (120588119880)
120597119905+ nabla sdot (120588119880 times 119880) = minusnabla119901 + nabla sdot 120591 + 119878
119872 (3)
where the stress tensor 120591 is related to the strain rate by
120591 = 120583 (nabla119880 + (nabla119880)119879
minus2
3120575 sdot nabla sdot 119880) (4)
The total energy equation is
120597 (120588ℎtot)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎtot)
= nabla sdot (120582nabla119879) + nabla sdot (119880 sdot 120591) + 119880 sdot 119878119872
+ 119878119864
(5)
where ℎtot is the total enthalpy related to the static enthalpyℎ(119879 119901) by
ℎtot = ℎ +1
21198802
(6)
The termnablasdot(119880sdot120591) represents the work due to viscous stressesand is called the viscous work term It models the internalheating by viscosity in the fluid and is negligible in mostflows The term 119880 sdot 119878
119872represents the work due to external
momentum sources and is currently neglectedThe thermal energy equation is
119870 =1
21198802
(7)
The mechanical energy equation is derived by taking the dotproduct of 119880 with the momentum equation (3)
120597 (120588119870)
120597119905+ nabla sdot (120588119880119870) = minus119880 sdot nabla119901 + 119880 (nabla sdot 120591) + 119880 sdot 119878
119872 (8)
Subtracting this equation from the total energy equation (5)yields the thermal energy equation
120597 (120588ℎ)
120597119905minus
120597119901
120597119905+ nabla sdot (120588119880ℎ)
= nabla sdot (120582nabla119879) + 119880 sdot nabla119901 + 120591 nabla119880 + 119878119864
(9)
The term 120591 nabla119880 is always positive and is called the viscousdissipation It models the internal heating by viscosity in thefluid and is negligible in most flows
322 Equation of State [32] The transport equationsdescribed above must be augmented with constitutive equa-tions of state for density and for enthalpy in order to form aclosed system In the most general case these state equationshave the form
120588 = 120588 (119901 119879)
119889ℎ =120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119901
119889119879 +120597ℎ
120597119879
10038161003816100381610038161003816100381610038161003816119879
119889119901
119888119901
= 119888119901
(119901 119879)
(10)
Incompressible equation of state is the simplest case densityis constant and 119888
119901can be (at most) a function of temperature
120588 = 120588spec
119889ℎ = 119888119901119889119879 +
120597119901
120588
119888119901
= 119888119901
(119901 119879)
(11)
Specific notations used in equations above are as followsWhen Cartesian coordinate system is assumed in which 119894119895 and 119896 are unit vectors in the three coordinate directionsvector operatornabla is defined such thatnabla = [120597120597119909 120597120597119910 120597120597119911]
For a vector function 119880(119909 119910 119911) where 119880 = [
119880119909
119880119910
119880119911
] the
divergence of 119880 is defined by nabla sdot 119880 = 120597119880119909120597119909 + 120597119880
119910120597119910 +
120597119880119911120597119911 The dyadic operator (or tensor product) of two
vectors 119880 and 119881 is defined as 119880 times 119881 = [
119880119909119881119909119880119909119881119910119880119909119881119911
119880119910119881119909119880119910119881119910119880119910119881119911
119880119911119881119909119880119911119881119910119880119911119881119911
]
8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

8 Computational and Mathematical Methods in Medicine
Section A-AH TC RC CC CHA
(1) Cylinder barrel (outer tube)(2) Cap end with the base mount(3) Rod head with the rod guide and seal(4) Rod with the piston and mount
(5) Inner tube(6) Base valve (magnetorheological) bushing(7) Magnetic coil
~U
A
4 3 1 5 6 7 2
Figure 8 Scheme of MR resistive exercise device for rowing machine CC compression chamber RC rebound chamber CH circularchannels in the bushing of magnetorheological base valve TC tubular chamber H radial holes connecting tubular and rebound chambers
In index notation the divergence operator can be written asnablasdot119880 = 120597119880
119894120597119909119894 where the summation convention is followed
that is index 119894 is summed over the three components Thequantity119880times119881 can be represented by 119880
119894119881119894(when119880 and 119881 are
vectors) or by 119880119894119881119895119896(when 119880 is a vector and 119881 is a matrix)
and so on Hence the quantitynablasdot(120588119880times119880) can be representedby (120597120597119909
119894)(120588119880119894119880119895)
Dynamic viscosity 120583 dependent on the magnetic fieldstrength (1) in the case under discussion appears in themomentum equation (3) (stress tensor 120591 (4))
33 Magnetorheological Resistive Exercise Device for RowingMachine The structural scheme of a twin-tube linearmotionmagnetorheological resistive exercise device (Figure 8) for alever-type rowing machine was developed on the base of thedata obtained during experimental and computational inves-tigation of a lever-type rowing simulator hydraulic cylindertype load generating units and magnetorheological damper
The operation principle and the construction of thedevice are analogous to those of a MR damper During thecompression of the device (recovery phase of rowing cycle)with rod 4 initially extracted the piston attached to the inter-nal end of the rod pushes theMR fluid forcing it to flow fromthe compression chamber CC to the tubular chamber TCbetween inner and outer tubes 1 and 5 through the channelsCHmade in the bushing of magnetorheological base valve 6Resistance to the MR fluid flow depends on the numberlength and cross-sectional area of the channels CH and ofcourse viscosity of the fluid which in turn depends on thestrength of the magnetic field controlled by the strength ofthe current in magnetic coil 7 surrounding base valve 6Thenthe fluid passes from the tubular chamber TC to the reboundchamber RC through four round radial holes H in the innertube near its rod end (the diameter of these holes is sig-nificantly larger than that of channels CH to ensure lowerresistance) At the backdraught when the rod with the pistonis extracted (drive phase of rowing cycle) MR fluid travels
conversely and passes the base valve in the opposite directionthus again giving a possibility to control the process bymeansof the magnetic field affecting its viscosity
Based on this scheme the parameterized 3D geometricaland computational models (Figure 9) of the MR resis-tive exercise device were elaborated by using ANSYS CFXCFD code (finite element mesh consisted of sim952000 003ndash63mm size volume elements it was refined in the zonesof outlet areas and narrowest channels of the base valve)General dimensions of the device the internal diameter ofthe inner cylinder (and the diameter of the piston) and thestroke were selected to correspond to the parameters of thehydraulic cylinder used in the rowing machine ldquoHAMMERCobrardquo [19] The remaining parameters (number diameterand length of the channels generating resistance to the flow)were determined by performing a series of steady state flowcomputations with models having different combinations ofthe mentioned parameters until the set of parameters ensur-ing the necessary range of resistance force (minimal resis-tance at the recovery stroke ie during the rod retractionand maximal one at the drive stroke or rod extraction) atcorresponding speeds of piston displacement was foundTheeffect of different strength of the magnetic field affecting MRfluid MRF-140CG was taken into account during computa-tions by using its non-Newtonian Herschel-Bulkley modelcharacterized by the magnetic field strength dependentparameters like viscosity consistency 119870 and yield stress 120591
119884
obtained during the previous stage of the researchAt first the number and the diameter of channels in
the MR valve bushing of a resistive exercise device ensuringminimal resistance force appearing during the recovery phaseof the rowing cycle were based on the results of investigationsof the rowing force conducted earlier and described in [20]This analysis was made by describing MR fluid as Newtonian(main physical properties according to Table 1 (left column))that is neglecting the effect of the magnetic field on fluidviscosity The speed of rodpiston retraction obtained during
Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 9
(a) (b)
Figure 9 Linear motion hydraulic cylinder type MR resistive exercise device for lever-type rowing machine (a) computational domaingeometrical model with boundary conditions (b) finite element mesh (952000 volume elements)
the first stage of the research (and compared with the resultsof investigations carried out earlier and described in [21]) wasused during these computationsThenumber of channels waschanged from 5 to 30 every 5 and their diameter increasedfrom 04 to 2mm every 04mm
Afterwards computations of the resistance force gener-ated by the resistive exercise device at different speeds ofthe rodpiston extraction (01 02 and 03ms) and differentstrength of the magnetic field (0ndash38mT) were carried out tofind the set of parameters (number and diameter of channelsin the bushing of MR valve) ensuring the necessary maximalresistance force obtained during the first stage of the researchand during the experimental investigations performed earlier[20]
34 Control of the Resistance Force within Single RowingStroke The aim of the last stage of numerical simulation of aMR resistive exercise device for a lever-type rowing machinewas to determine how the strength of the magnetic field con-trolling the MR fluid viscosity (and thus the size of the resis-tance force) should be changed during one rowing stroke toensure the pattern of this force adequate for the force resultingwhen rowing a real boat
To that purpose one more series of computations wascarried out using the model of resistive exercise device withthe parameters that were obtained in the previous stage of theresearch In the first instance the normalized reference curveof cylinder compression speed during the rowing stroke cycledrive phase was built on the base of the results of investiga-tions conducted earlier [21] (whichever curve may be used inthe particular case) and divided into 50 steps After thatthe size of the resistance force for each of the 50 steps witha corresponding piston speed was computed at a differentstrength of the magnetic field (0 13 25 and 38mT) Thus avariation of the resistance force during the rowing cycle atconstant magnetic field of different strength was obtainedNext the normalized reference curve of the resistance forceduring the rowing stroke drive phase was built on the resultsof investigations conducted earlier [20] (whichever curvemay be used in the particular case too) It was also dividedinto 50 steps and computations of the resistance force ateach step were carried out by using piston speed at each stepaccording to the cylinder compression speed reference curvementioned above But in this case the strength of the mag-netic field affecting theMR fluid was changed until the size ofthe calculated resistance force matched the size of the force
at the same step of the reference force curve In this way thelaw of change of the magnetic field strength ensuring thenecessary pattern of the resistance force during a singlerowing strike was defined
4 Results and Discussion
41 Parameters of Non-Newtonian Model of the Magnetorheo-logical Fluid Assuming that control of resistance force gen-erated by the resistive exercise device is performed by meansof the magnetic field which influences viscosity of the MRfluid MRF140-CG circulating in the device the dependenceof viscosity consistency 119870 (Herschel-Bulkley mathematicalmodel inANSYSCFXCFD code) on the strength ofmagneticfield was evaluated It was done by performing numericalsimulation of a linear stroke MR damper operating in differ-ent modes and comparing the results of computations withthe results of experimental investigation of an analogical MRdamper described in [31] A series of steady state flow analysesof the hydrodynamic pressure affecting the piston of the MRdamper resulting in its resistance force at a different speedof piston movement as well as different strength of magneticfield were performed The viscosity consistency 119870 was beingadjusted until the results of the computer simulation reacheda satisfactory conformance with the experimentally obtainedresistance force (difference less than 5)
Figure 10 shows the trajectories and velocities of mag-netorheological fluid flow in a MR damper when the flowinput velocity corresponds to 00075ms speed of the pis-ton and 25mT magnetic field strength The final values ofyield stresses 120591
119884and viscosity consistency 119870 used for the
description of the MR fluid MRF140-CG as non-Newtonianbymeans of Herschel-Bulkleymathematical model are givenin Table 2 Comparison of experimentally determined andcalculated resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic fieldstrength is shown in Figure 11
42 Magnetorheological Resistive Exercise Device for Row-ing Machine The virtual prototype of the twin-tube linearmotion magnetorheological resistive exercise device for alever-type rowing machine was elaborated according to thestructural scheme of such a device described in Section 33(Figure 8) A parametrical 3D geometrical model of themagnetorheological resistive exercise device characterized by
10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

10 Computational and Mathematical Methods in Medicine
Velocity streamline 1
2026e minus 008
2842e minus 001
5685e minus 001
8527e minus 001
1137e + 000
(m sminus
1)
Figure 10 Trajectories and velocities of the magnetorheological fluid flow in MR damper in the case of flow input velocity corresponding to00075ms piston speed and 25mT magnetic field
Table 2 Values of yield stresses 120591119884and viscosity consistency 119870 of
MR fluid at different strength of magnetic field 119861
119861 mT 120591119884 Pa 119870 Pa
13 800 525 1600 1438 2600 18
1 2 35 5 75Piston speed (mms)
01020304050607080
Resis
tanc
e for
ce (N
)
38mT CFD25mT CFD13mT CFD0T CFD
38mT EXP25mT EXP13mT EXP0T EXP
Figure 11 Comparison of experimentally determined (EXP) andcalculated (CFD) resistance forces generated by a MR damper atdifferent speeds of the piston and different magnetic field strength(0 T 13mT 25mT and 38mT magnetic field)
the following structural features was created by using of 3DCAD system SolidWorks
(i) Body scheme twin tube(ii) Piston stroke 280mm(iii) Diameter of the piston (inner tube internal diameter)
27mm(iv) Number of channels for fluid passage between the
compression and tubular chambers of cylinder 5(v) Diameter of the channels in the bushing for fluid
passage between the chambers of cylinder 2mm(vi) Length of the base valve bushing 17mm
On the basis of the 3D geometrical model of a MRresistive exercise device the computational model of itscavities filled with MR fluid MRF140-CG (the same as incase of MR damper) was built Computations of resistanceforce generated by theMR resistive exercise device at differentworking modes (strength of magnetic field and piston speed)were carried out bymeans of ANSYSCFXCFD software (Fig-ure 12) in analogy with numerical simulation of aMRdamper(Section 41) During this numerical simulation the MR fluidnon-Newtonian properties (dependent on magnetic fieldstrength see Table 2) obtained during the previous stage ofthe research were taken into account
The numerical modeling of the MR resistive exercisedevice had a double purpose First of all the number andcross-sectional area (or diameter) of the base valve bushing(pos 6 Figure 8) channels CH (Figure 8) for the MR fluidpassage between the compression and tubular chambers ofthe device (CC and TC Figure 8) had to be clarified ensuringthe minimal resistance (dozens of newtons Section 22) forceduring the recovery phase (passivemode or 0 Tmagnetic fieldstrength) Afterwards the number and cross-sectional area(or diameter) of these channels ensuring maximal resistanceforce during drive phase of the rowing stroke cycle had tobe figured out This force should be near 5500N in the caseof 1000N force on the handle of a L-shaped lever imitatingthe oar and the ratio of its arms 119871
1and 119871
2equal to 55
(Figure 1 and Section 22)Thepiston speedwas nearmaximal(03ms) in both cases while the maximal magnetic fieldstrength for the drive phase was equal to 38mT Simulationwas carried out by increasing the number of the channelsfrom 5 to 30 with a step of 5 and reducing the diameter ofthe channels from 2mm to 04mm every 04mm
Computations have shown that the minimal (for therecovery phase) resistance force resulting from the hydrody-namic pressure acting on the piston is ensured even when thebase valve bushing contains 5 or 10 channels of 12ndash20mmdiameter However in such a case the necessary maximalresistance force in the drive phase is not reached even whenthe maximal strength magnetic field (38mT) is applied (thebase valve is too leaky) As it is shown below the necessaryrange of the resistance force (0ndash5500N) was obtained whenthe number of the channels was increased to 25 and theirdiameter reduced to 08mm
Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 11
Velocity streamline 1
1517e minus 004
1217e minus 001
2432e minus 001
3648e minus 001
4863e minus 001
(m sminus
1)
Figure 12 Trajectories and velocities of magnetorheological fluid flow in MR resistive exercise device for rowing machine (number of thechannels in the base valve bushing for fluid passage between the chambers 25 diameter 08mm)
Supplementary analysis was carried out to verify the finaldesign (base valve with 25 channels of 08mm diameter)and the computational model of the MR resistive exercisedevice The resistance force generated by a device with suchparameters operating in a passive mode (with no effect ofthe magnetic field on MR fluid viscosity) was calculatedand compared with the results of experimental researchof regular hydraulic cylinder number 2 (having the samediameter piston) used in a rowing machine [27] It was foundthat the calculated values of the resistance force (at differentpiston speeds) differ from those obtained experimentallyless than 25 Consequently it was stated that the numberand diameter of the channels are selected properly and thecomputational model may be used for further simulations
43 Control of the Resistance Force within Rowing Stroke byChanging Magnetic Field Acting the MR Fluid The last twoseries of numerical analyses were carried out to determinethe law of change of the magnetic field strength directlyinfluencing MR fluid viscosity and thereby the resistanceforce generated by the magnetorheological resistive devicewhich would ensure the pattern of the resistance force on theoar handle adequate for real rowing
The first set of computations (using models of MR fluidand themagnetorheological resistive device described above)gave the dependencies of the resistance force generated bythe device on the piston speed and magnetic field strengthIt was found out that these dependencies are practicallylinear the maximal resistance force when the piston speedis maximal (03ms) is near 1000N in a passive mode and2000 4000 and 5550N when the strength of the magneticfield applied is 13 25 and 38mT respectively It means thatthemaximal hydrodynamic force acting on the piston that isthe resistance force of a MR device is 5550N (at the maximalpiston speed and maximal strength magnetic field) If such adevice were installed into the rowing machine with the ratioof the L-shaped lever arms119871
1and119871
2 as shown in Figure 1 the
force acting on the oar handle would be 55 times lower about1000N This force exceeds the maximal force (600ndash700N)
which is usually reached during the real rowing neverthelesssuch a reserve of themaximal force can be useful for examplewhen it is necessary to compensate the change of MR fluidproperties (decrement of viscosity) due to its heating aftera large number of exercising cycles or simply to reduce theheating intensity due to training at a reduced load
Onemore series of computations was carried out in orderto find out how the strength of the magnetic field generatedby the coil of aMR resistive exercise device should be changedwithin a single stroke cycle to ensure the pattern of theresistance force adequate for the force on the oar of a realboat In this case the size of this force at different momentsof a normalized rowing stroke cycle was calculated by takinginto account the variation of piston speed during the strokeand the effect of a different strengthmagnetic field whichwassimulated by a corresponding set of parameters describingthe properties of the MR fluid It may be noticed that theforce pattern of rowing a real boat [20] differs significantlyfrom the force patterns given by the exerciser with MRresistive exercise devices when the strength of the magneticfield which acts on the MR fluid is constant (0mT 13mT25mT and 38mT Figure 13) In the case of minimal strengthof the magnetic field (and correspondingly viscosity of theMR fluid) the curve of resistance force generated by thedevice lies substantially below the representative force curveof real rowing (Figure 13 curves 0mT and 13mT) but whenthe magnetic field strength is increased the resistance forcegrows up and in the case of the strongest magnetic fieldit exceeds the necessary level (Figure 13 curve 38mT) Thisfact suggests the conclusion that the force generated by a MRresistive exercise devicemay be controlled by a correspondingchange of strength of the magnetic field affecting MR fluid atthe relevant time moments of the exercise stroke and suchcontrolmay give the pattern of resistance force reconstructingthe variation of resistance force adequate for the force on theoar resulting when rowing a real boat
The law of variation of the magnetic field strength gener-ated by the coil of a MR resistive exercise device of a lever-type rowing machine giving the pattern of resistance force
12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

12 Computational and Mathematical Methods in Medicine
Real boat
0
200
400
600
800
1000
Resis
tanc
e for
ce (N
)
02 04 06 08 10Rowing stroke cycle
38mT
25mT13mT
0T
Figure 13 The patterns of resistance force on the oar handle when rowing a real boat [20] and when exercising on a rowing machine withMR loading device (at strength of the magnetic field (0 T 13mT 25mT and 38mT))
Mag
netic
fiel
d str
engt
h (T
)
02 04 06 08 10Rowing stroke cycle
0
001
002
003
004
Figure 14 Law of variation of magnetic field strength giving thepattern of resistance force corresponding to rowing of the real boat
within a single stroke cycle adequate for rowing a real boat(curve ldquoreal boatrdquo in Figure 13) at 20∘C temperature is shownin Figure 14 It was obtained by performing computationsof resistance force generated by the controllable resistancedevice during which normalized reference curves of thepiston speed and resistance variation during the stroke werecombined as described in Section 34
To ensure the pattern of resistance force correspondingto rowing a real boat a rowing machine should be equippedwith a programmable control system with a set of sensorsmeasuring various kinematic-dynamic parameters duringthe exercise cycle such as angular sensors of the vertical andhorizontal position of levers simulating oars resistance forceand temperature sensors (Figure 15) In this way the strengthof the electric current in the coils of MR resistive exer-cise devices could be controlled by the processorcontrolleraccording to the position and speed of movement of the oarstemperature of hydraulic cylinders or even biomechanicaland physiological parameters of the athlete Thus therewould be a possibility to simulate adequately the variationof rowing force during a single stroke and a series of strokes(training session or competition) or even to use an exerciserfor rehabilitation needs (by ensuring isotonic or isokineticmodes of training) or simply to compensate reduction of
the resistance force due to heating of the device during thetraining session
5 Conclusions
Improvement of techniques and learning of psychomotorskills helping professional athletes to achieve maximal sportsperformance is possible only in cases when exercisers usedby them conform to the kinematics of movements andthe resistance typical for particular sports However mostavailable rowing simulators are suitable only for trainingthe general physical condition because usually they are ofspecific kinematics and their resistance characteristics are notadequate for real rowing unstable and practically uncontrol-lable
The magnetorheological resistive exercise device and itscontrol system for a lever-type rowing machine have beendeveloped that can ensure variation of resistance force onthe oar handle adequate for hydrodynamic resistance whichoccurs during a real boat rowing stroke Computationalfluid dynamic simulations of the device have been carriedout to employ the magnetorheological fluid technology forsolving the resistance force control problem To find themainstructural parameters of a device giving maximal adequacyof the resistance to real rowing the MR fluid circulating inthe device was modeled as non-Newtonian To that purposethe dependencies of parameters describing properties ofmagnetorheological fluid MRF140-CG on the strength of themagnetic field used for the control of resistance force gener-ated by the device were found and used during the numericalmodeling After verification of the computational model thelaw of variation of themagnetic field strengthwas figured outgiving the pattern of resistance force corresponding to rowinga real boat
The possibility of controlling resistance during a singlestroke also ensures simulating sequences of different resis-tance strokes in the case of reconstruction of a training ses-sion or competition and using the exerciser for rehabilitationneeds (by ensuring isotonic or isokinetic modes of training)Furthermore the controllable resistive device and results ofmagnetorheological fluid numerical modeling presented in
Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Computational and Mathematical Methods in Medicine 13
1
(1) Frame of the machine(2) Crosspiece with oars hinges at its ends(3) Levers representing oar handles(4) MR resistive exercise devices(5) Coils of MR resistive exercise devices
(6) Processorcontroller(7) Angular sensor of the lever (oar handle)(8) MR device temperature sensor(9) Resistance force sensor
3 2 4
5
6
8 97
Figure 15 Scheme of lever-type rowing machine with the programmable control system of MR resistive exercise device
this paper may also be employed in development of othersports and rehabilitation equipment based on magnetorhe-ological technology
Competing Interests
The authors declare that they have no competing interests
References
[1] G J Wilson A D Walshe andM R Fisher ldquoThe developmentof an isokinetic squat device reliability and relationship to func-tional performancerdquo European Journal of Applied Physiologyand Occupational Physiology vol 75 no 5 pp 455ndash461 1997
[2] K S Wong and W H Liao ldquoAdaptive body fitness equipmentusing magnetorheological fluidsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo05) pp 432ndash437 Hong Kong July 2005
[3] S Dong K-Q Lu J Q Sun and K Rudolph ldquoRehabilitationdevice with variable resistance and intelligent controlrdquoMedicalEngineering and Physics vol 27 no 3 pp 249ndash255 2005
[4] A Baudouin and D Hawkins ldquoInvestigation of biomechanicalfactors affecting rowing performancerdquo Journal of Biomechanicsvol 37 no 7 pp 969ndash976 2004
[5] V M Zatsiorsky Science and Practice of Strength TrainingHuman Kinetics Champaign Ill USA 1995
[6] M Van Holst ldquoOn Rowingrdquo 2012 httphomehccnetnlmholstRoeiWebhtml
[7] A Baudouin and D Hawkins ldquoA biomechanical review offactors affecting rowing performancerdquo British Journal of SportsMedicine vol 36 no 6 pp 396ndash402 2002
[8] V Kleshnev ldquoBoat acceleration temporal structure of the strokecycle and effectiveness in rowingrdquo Proceedings of the Institutionof Mechanical Engineers Part P Journal of Sports Engineeringand Technology vol 224 no 1 pp 63ndash74 2010
[9] Ch Pulman ldquoThe Physics of Rowingrdquo 2015 httpeodgatmoxacukuserdudhiarowingphysicsrowingpdf
[10] Concept2 July 2015 httpwwwconcept2com[11] ALegacy of Support toAcademics andAthletics 2015 httpwww
northeasterneduleadershipcampaigndonorsbarlettahtml[12] B Chetran D Mandru S Noveanu and O Tatar ldquoLinear
activepassive upper limb exerciserrdquo in Proceedings of the Inter-national Conference on Advancements of Medicine and HealthCare through Technology vol 36 pp 152ndash155 Cluj-NapocaRomania 2011
[13] M Avraam M Horodinca P Letier and A PreumontldquoPortable smart wrist rehabilitation device driven by rotationalMR-fluid brake actuator for telemedecine applicationsrdquo inProceedings of the IEEE International Conference on IntelligentRobots and Systems (RSJ rsquo08) pp 1441ndash1446 IEEE Nice FranceSeptember 2008
[14] K Oda S Isozumi Y Ohyama K Tamida T Kikuchi and JFurusho ldquoDevelopment of isokinetic and iso-contractile exer-cise machine lsquoMEM-MRBrsquo using MR brakerdquo in Proceedings ofthe IEEE International Conference on Rehabilitation Robotics(ICORR rsquo09) pp 6ndash11 Kyoto Japan June 2009
[15] B Weinberg A Khanicheh M Sivak et al ldquoVariable resis-tance hand device using an electro-rheologic fluid damperrdquo in
14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

14 Computational and Mathematical Methods in Medicine
Proceedings of the World Haptics 2009 Third Joint EuroHapticsConference and Symposium on Haptic Interfaces for VirtualEnvironment and Teleoperator Systems pp 529ndash534 Salt LakeCity Utah USA March 2009
[16] R Kamnik J Perdan T Bajd and M Munih ldquoExercise devicefor upper-extremity sensory-motor capability augmentationbased on magneto-rheological fluid actuatorrdquo in Proceedingsof the 19th International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD rsquo10) pp 71ndash74 Budapest Hungary June2010
[17] A Rajendran C Hollitt and W N Browne ldquoInvestigatingthe use of magneto-rheological fluid in an active compliantactuator for a stroke rehabilitation systemrdquo in Proceedings of theAustralasian Conference on Robotics and Automation pp 1ndash8Melbourne Australia December 2011
[18] Rowing machine KETTLER Kadett 2015 httpintlsportket-tlernetenproductdetailskatalogpankatalognn500550html
[19] Rowing machine HAMMER Cobra 2015 httpenhammer-fitnessdeprodukte-hammerausdauertrainingrudergerateham-mer-rudergeraet-cobrahtml
[20] V Grigas A Domeika A Legha D Satkunskiene and R TTolocka ldquoRowing force and its simulation on training facilityrdquoSolid State Phenomena Mechatronics Systems and Materials IIIvol 147ndash149 pp 712ndash715 2009
[21] V Grigas A Legha A Sulginas and R T Tolocka ldquoRowingforce simulation and control systemrdquo Solid State PhenomenaMechatronic Systems and Materials Mechatronic Systems andRobotics vol 164 pp 161ndash164 2010
[22] R Caroe ldquoRowing Force Curvemdashhow quickly can it changerdquo2015 httpwwwrowperfectcoukrowing-force-curve-how-quickly-can-it-change
[23] Peak Force Management 2015 httpwwwatkinsophtcomrowforcpeakhtm
[24] Oar Testing amp Theory 2015 httpsykescomauoarsoar-test-ing-theory
[25] Ir C J N Rekers Verification of the Rowperfect Ergometer2015 httpwwwrowperfectcomaurowing-trainingphysics-behind-the-rowperfect-advantageverification-of-rowperfect
[26] V Kleshnev ldquoRecent developments in sport sciencerdquo 2015httphighperformancerowingnetjournalcurrentPage=8
[27] A Domeika V Eidukynas V Grigas and A SulginasldquoResearch of the force characteristics of hydraulic cylinder typeloading devices for exercise machinesrdquo Mechanika vol 20 no5 pp 494ndash499 2014
[28] ANSYS ANSYS CFXmdashSolver Modeling Guide Release 150ANSYS Canonsburg Pa USA 2013 http14820481206Ansys150ANSYS20CFX-Solver20Modeling20Guidepdf
[29] LORD technical data ldquoMRF-140CG magneto-rheologicalfluidrdquo 2013 httpwwwlordfulfillmentcomuploadDS7012pdf
[30] X Wang and F Gordaninejad ldquoField-controllable electro-and magneto-rheological fluid dampers in flow mode usingHerschel-Bulkley theoryrdquo in Smart Structures and Materials2000 Damping and Isolation vol 3989 of Proceedings of SPIENewport Beach Calif USA March 2000
[31] E Dragasius V Grigas D Mazeika and A Sulginas ldquoEvalua-tion of the resistance force ofmagnetorheological fluid damperrdquoJournal of Vibroengineering vol 14 no 1 pp 1ndash6 2012
[32] ANSYS CFXmdashSolver Theory guide Release 121 2009 httporangeengrucdaviseduDocumentation121121CFXxthrypdf
Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom

Submit your manuscripts athttpwwwhindawicom
Stem CellsInternational
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MEDIATORSINFLAMMATION
of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Behavioural Neurology
EndocrinologyInternational Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Disease Markers
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
BioMed Research International
OncologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Oxidative Medicine and Cellular Longevity
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
PPAR Research
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Immunology ResearchHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
ObesityJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Computational and Mathematical Methods in Medicine
OphthalmologyJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Diabetes ResearchJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Research and TreatmentAIDS
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Gastroenterology Research and Practice
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Parkinsonrsquos Disease
Evidence-Based Complementary and Alternative Medicine
Volume 2014Hindawi Publishing Corporationhttpwwwhindawicom