Embed Size (px)
Citation preview
![Page 1: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/1.jpg)
Research ArticleDesign of Sail-Assisted Unmanned Surface VehicleIntelligent Control System
Yong Ma1 Yujiao Zhao12 Jiantao Diao2 Langxiong Gan1
Huaxiong Bi1 and Jingming Zhao3
1School of Navigation Hubei Key Laboratory of Inland Shipping Technology Wuhan University of Technology Wuhan 430063 China2School of Computer Science and Technology Wuhan University of Technology Wuhan 430063 China3School of Energy and Power Engineering Wuhan University of Technology Wuhan 430063 China
Correspondence should be addressed to Yong Ma myongdlwhuteducn
Received 18 August 2016 Revised 6 November 2016 Accepted 7 November 2016
Academic Editor Guillermo Botella-Juan
Copyright copy 2016 Yong Ma et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
To achieve the wind sail-assisted function of the unmanned surface vehicle (USV) this work focuses on the design problems of thesail-assisted USV intelligent control systems (SUICS) and illustrates the implementation process of the SUICSThe SUICS consistsof the communication system the sensor system the PC platform and the lower machine platform To make full use of the windenergy in the SUICS we propose the sail angle of attack automatic adjustment (Sail 4A) algorithm and present the realization flowfor each subsystem of the SUICS By using the test boat the design and implementation of the SUICS are fulfilled systematicallyExperiments verify the performance and effectiveness of our SUICSThe SUICS enhances the intelligent utility of sustainable windenergy for the sail-assisted USV significantly and plays a vital role in shipping energy-saving emission reduction requirementsissued by International Maritime Organization (IMO)
1 Introduction
Featured by large-scale reserves wide distribution and littlepollution as one of the popular sustainable energy [1ndash3]wind energy has been extensively used in the shippingindustry By using the wind energy numerous studies paidattention to the vessels equipped with the sail Generallythe present studies mainly emphasize on the aerodynamicperformance [4 5] and navigation strategy [6ndash8] for the sail-boat and the sail-assisted vessels Little attention has stressedthe sail-assisted control system for the vessels Restricted tothe petrochemical energy crisis and environmental pollutionInternational Maritime Organization (IMO) has put forwardquite strict requirements for shipping energy conservationand emission reduction Wind energy would do great deedsfor the sail-assisted vessels by way of the effective solutionsIt is sane to ascertain that with the effective control systemthe wind energy utilization of the sail-assisted vessel can beachieved with ease
Meanwhile the unmanned surface vehicle (USV) hasbeen adopted in the short-rangemaritime activities including
the military and the civil domains The USV would bringthe positive impact on the shipping industry by virtue ofits autonomy and flexibility However owing to the limitedstorage space and load capacity the USV could not facilitythe large-scale engine or the battery apparatuses that inhibitthe navigation time and distance of the USV dramaticallyFollowing that if the USV is equipped with the sail thenthe energy consumption can be lowered down considerablyand the navigation distance can be extended naturally Con-sequently the sail-assisted USV intelligent control systems(SUICS) is proposed to exploit sustainable wind energy
Our SUICS consists of the design and the implementa-tion phases During the SUICS design phase the modulesincluding the communication system the sensor system thePC platform and the lower machine platform are detailedsequentially Within the implementation phase by using thetest boat the implement flows related to the communica-tion system the sensor system and the drive system areexpounded and then each module is integrated into ourSUICS
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 2958240 13 pageshttpdxdoiorg10115520162958240
2 Mathematical Problems in Engineering
Generous types of sails have been applied in the sail-assisted vessels From the perspective of appearance the sailscan be classified into the jib and square sails [5] And therectangular sail the broad top sail and parallel quadrilateralsail all belong to the square sail When it comes to thematerial the sail can be grouped into the soft sail and hardsail [9] In terms of the cross-sectional shape the sail canbe divided into the wing sail the laminar flow sail thelie back sail and the circular arc sail Based on numeroustunnel experiment analyses it is demonstrated that thecircular arc sail is superior to other sails in aspects of thebest aerodynamic performance the simpler operation andproduction process [10]
Wind power is one environmentally friendly energythat can be used a substitute for the drying up fossil fuel[4] Generous researches have investigated the sail-assistednavigation techniques including the behavior of yacht softsails [11] fluid-structure interaction issues [12] and unsteadyaerodynamic phenomena [13] In [14] a kite modellingapproach into 6 degrees of freedom sailboat dynamic simu-lator was fulfilled following that the performances betweenthe kite and classical rig sailing can be evaluated Fromthe perspective of dynamic simulation [14] stressed kitepropulsion performance from upwind and downwind withone designed keel boat Most of the current studies [11ndash14] concentrated on the soft sail structures of yachts Topromote the wind energy usage taking into account theshipping industry requirements it is vital to develop the hardsail-assisted vessels Thereupon the circular arc hard sail isadopted to carry out the SUICS studies
With the aid of the SUICS the accurate data relatedto the wind can be displayed collected and processedfor the usage of the vessel decision making in real timeand then by using the sail automatic control system thecorrect actions could be instructed promptly The SUICSaims at using the wind energy scientifically and intelligentlyand offering the potential solution to cut down the energyexpenditure of the shipping industry By using the SUICSthe navigation distance of the USV can be extended benefitsfrom the effective use of wind energy No doubt that with theembedded SUICS the energy consumption of the vessels withthe assisted sail can be reduced [15]
The contributions of this work are as follows (1) Designand implement the SUICS to fulfill the effective usage ofthe sustainable wind energy for the sail-assisted USV (2) tointelligently control the sail angle of the attack we proposethe automatic adjustment algorithm for the sail automaticcontrol system of the SUICS (3) to fulfill the human-machineinterface friendly we design the PC platform software forthe SUICS and (4) our designed data frame format is char-acterized by the quite low transmission error rate and fit forthe compact control system and is useful to the communica-tion module of the remote control system
This paper is organized as follows Section 2 demonstratesthemodule design work of the SUICS including the commu-nication system the sensor system the sail automatic controlsystem the PC platform and the low machine platformThen Section 3 elaborates the implement processes of the
Signal
Lower machine platform
Signalcommand
Signalcommand
Sensor system
Wind senor system
Ultrasonic senor system
PC platform
Communication system
Drive system
Sail automatic control system
Figure 1 Logic diagram of the SUICS
SUICS In Section 4 experiments verify the effectiveness ofthe SUCIS Finally Section 5 concludes this paper
2 Design of the Sail-Assisted USVIntelligent Control Systems
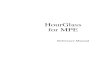
The communication system the sensor system the PCplatform and the lower machine platform compose theSUICS Figure 1 shows the logic diagram of the SUICS Thesensor system gathers the real time data including the winddirection and speed and the environment data then by wayof the serial port communication the data are transferred tothe Single Chip Microcomputer (SCM) following that theSCM adjusts the sail angle of attack automatically by usingthe data with the proposed sail angle of attack automaticadjustment algorithm Simultaneously the data are sent tothe PC platform through the communication system the PCplatform would echo data to the user By using the human-machine interface the user could operate the sail throughcommands directly the commands are encapsulated in aframe then the frame will be sent to the lower machineplatform and the lower machine platform parses the frameand executes corresponding actions
By using the SUICS the sail angle of attack can beadjusted adaptively then the sustainable wind energy canbe exploited to the maximum With the aid of the SUICSthe activity domain and time of the sail-assisted USV canbe strengthened benefiting from the energy offered by thesustainable wind Figure 2 depicts the system structurediagram of the SUICS the embedded programming methodis introduced to attain the digital precise control of thesail-assisted USV The design details of the communicationsystem the sensor system the PC platform and the lowermachine platform are sequentially illustrated as shown inFigure 2
Mathematical Problems in Engineering 3
Wind directionsensor
Wind speedsensor
PC platform
MCU
Communicationsystem
Servo motordriver
Servo motor
Sail
Figure 2 System structure diagram of the SUICS
Excellent works have paid attention to the system archi-tectures from floating point to fixed point [16ndash19] includinganalysis of mean-square-error for fixed point FFT units [16]efficient implementation of a spectrum analyzer for fixedpoint architectures [17] quantization analysis and enhance-ment of a VLSI gradient-based motion estimation architec-ture [18] and presentation of robust bioinspired architecturefor optical flow computation [19]When comes to our SUICSas shown in Figure 2 the range of wind speed sensor is from04ms to 450ms with 01ms resolution the resolution ofwind direction sensor is 1∘ the data acquisition cycle is 3 sthe communication model transfer rate is 150Mbps and thecommunication distance is 120m
21 Communication System Within the communication sys-tem the network formation and the data frame based on theTCPIP protocol are stressed
211 Communication Network Formation Generally with awireless network card and an AP set the wireless networkcan be established as one router After the PC platformconnects to above Wi-Fi module the PC can interact withthe low machine platform placed on the USV in real time[20] In the communication protocol the communicationmodule services for the control system and they belong todata link layer and the application layer respectively Withrespect to the control system the communication module istransparent and independent those identities contribute tothe convenience to the data process and the maintenance ofthe platforms [21]
Table 1 Data frame format
Framehead
Subsystemnumber
Equipmentnumber Commanddata Tail
frame
212 Data Frame Based on TCPIP Protocol Our commu-nication system complies with the TCPIP protocol [22] Aspresented in Table 1 we propose one compacted streamlineddata frame format for the small-scale control system Theshorter the length of the data frame format the faster thedata transmission speed By using our data frame format thesystem response speed can be improved and the data conflictcan be reduced When it comes to the data frame solutionthe procedure would take the first judgment of the value ofthe first two bits of the data frame and then process the dataof the small-scale control systemwith one effective data framesolution
22 Data Processing for the Sensor System During the nav-igation process to make sound decisions the sail-assistedUSV should acquire the data related to the wind energyand the environment around itself in real time By usingthe wind speed sensor and the wind direction sensor theraw data are obtained [23] The wind speed equals 171 of itsinitial frequency signal and the wind direction data also canbe reached after being processed by digital filter Then theprocessed data are delivered to the sail controller placed onthe lowermachine platform simultaneouslyWith above datathe sail controller could execute certain actions on the sail andsend the data to the PC platform for display
Owing to the limited space and load capacity of the USVto detect the environment including the obstacles around theUSV the radar is not a viable option definitely Therefore theportable ultrasonic ranging sensor is adopted to overcomeabove limitation We place three ultrasonic ranging sensorsin the bow the port side and the starboard side successivelyFurthermore to expand the detection width under eachsensor we install the microservos to steer the sensors spinConsequently the detection ability of the ultrasonic rangingsensor is strengthened and the collected data are fed back tothe upper machine platform for decision making
23 Design of the PC Platform Software The sail-assistedUSV has combined the semiautonomous model and theremote control model Thus the human-machine interface[24] plays a great role between the PC operator and the sub-systems embedded in the lower machine platform By usingthe human-machine interface the operator could acquirethe dynamic information around the sail-assisted USV andexecute commands on certain equipment with ease Conse-quently the PC platform should satisfy the criteria includingthe friendly human-machine interface the multifunctionalapplications contribute to access to the dynamic informationrelated to the sail-assisted USV Taken above criteria intoaccount within the design process the QT platform [25] isapplied to build the PC platform and the TCPIP protocol[26] is adopted to guarantee the quality and reliability of thecommunication
4 Mathematical Problems in Engineering
U3
P101P112P123P134P145P156P167P178RST9P30(R)10P31(T)11P32(0)12P33(1)13P34(T)14P35(T)15P36(W)16P37(R)17XTAL218XTAL119GND20 P20 21P21 22P22 23P23 24P24 25P25 26P26 27P27 28SPEN 29ALEPR 30EAVPP 31P07 32P06 33P05 34P04 35P03 36P02 37P01 38P00 39VCC 40
IC1
89C52
DB1DB2DB3DB4DB5DB6DB7DB8RSTP30P31CSDAINT1LCDENP35P36P37X2X1
D0D1D2D3D4D5D6D7EAALE
P27DULADIOLAP24FW18B20P21P20
ZDXZDB1DB2DB3DB4DB5DB6DB7DB8
P30P31CSDAINT1LCDENP35P36P37
P20P2118B20FWP24DIOLADULAP27
D0D1D2D3D4D5D6D7
GND
1122334455667788
U0
24X8 P
1122334455667788
U2
24X8 P
1 12 23 34 45 56 67 78 8
U1
24X8 P112 23 34 45 56 67 78 8
24X8 P
Figure 3 The pin of the SCM
24 Design of the Lower Machine Platform
241 Brief Introduction of the Lower Machine Platform Thelower machine platformmainly consists of the sail automaticcontrol system and the drive system and executes the infor-mation related to the control of the sail and the motion of theUSV it is the core part of the SUICS on account of the safetyand performance of the sail-assisted USV The distributedprocessing technology is used to integrate multiple 51 SingleChipMicyoco (SCM) that each SCM dedicates to one specialfunction and actualize the parallel process ability of thesystems embedded in the lower machine platform [27]Following that the information process speed and accuracyof the lower machine platform can be enhanced benefitingfrom the adopted design technologies Figure 3 shows the pinof the SCM
In Figure 3 P0 port is a set of eight-bit open drain bidirec-tional IO port and it is an addressdata busmultiplexer portP1 port is an eight-bit IO port with internal pullups Duringflash programming and program verification P1 receives alow eight-bit address while P2 receives a high-bit addressand other control data P3 port is an eight-bit IO portwith internal pullups In addition to as a general IO portP30(RXD) is a serial port to input P31(TXD) is a serialport to output P32(INT0) is the external interrupt zero portP33(INT1) is the external interrupt one port P34(T0) istimercounter zero P35(T1) is timercounter one P36(WR)is the external data memory write strobe line and P37(RD)is the external data memory read strobe line
Design of the sail automatic control system is stressedin the lower machine platform To design the high-qualitysail automatic control system it is necessary to achieve theoptimum sail angle of attack and then by using the effectivealgorithm to fulfill the automatic adjustment for the sail angleof attack Following that we illustrate the procedure of howto obtain the optimum sail angle of attack and our proposedsail angle of attack automatic adjustment algorithm
FS
FR
FD FH FL
FT VS
VT
VA
120572
120573 120574
120595120579
Figure 4 Force analysis of the sail
242 Procedure to Obtain the Optimum Angle of AttackFigure 4 shows the force analysis of the sail Suppose119881119878119881119879 120579120574119881119860 120573 120572 and120595 represent the speed of the UVS actual windspeed the actual wind direction angle between119881119878 and119881119879 thedrift angle between 119881119878 and the longitudinal axis of the USVrelative wind speed relative wind direction angle between119881119860and 119881119878 the sail angle of attack and the turning angle of thesail between the longitudinal axis of the USV and the sailingstring respectively
When the wind is acting on the sails the sail will generatea lift force perpendicular to the relative wind speed 119865119871and a resistance along the relative wind speed 119865119863 [28 29]119865119879 denotes the thrust parallel to the course of the vesselgenerated by the sail and 119865119867 denotes the transverse forceperpendicular to the direction of the USV Then accordingto the geometrical relationship 119865119879 and 119865119867 can be
119865119879 = 119865119871 sin120573 minus 119865119863 cos120573
119865119867 = 119865119871 cos120573 + 119865119863 sin120573(1)
Mathematical Problems in Engineering 5
After nondimensional process
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
119862119884 = 119862119871 cos120573 + 119862119863 sin120573(2)
The lift coefficient drag coefficient thrust coefficientand cornering ratio are sequentially symbolized as 119862119871 119862119863119862119883 and 119862119884 Suppose 120588 119881 119878 ] 120582 and 120572opt stand for airdensity wind speed sail projected area camber ratio of sailratio of sail and the optimum angle of attack in sequenceAccording to the relationship between the drag coefficientand lift coefficient with the angle of attack aspect ratio andcamber ratio the following functions can be reached
119862119871 = 119891 (120572 120582 ])
119862119863 = 119892 (120572 120582 ])
119862119871 =119865119871
(12) 1205881198812119878
119862119863 =119865119863
(12) 1205881198812119878
119862119883 =119865119879
(12) 1205881198812119878
119862119884 =119865119863
(12) 1205881198812119878
(3)
To make full use of sustainable wind energy it is essentialto obtain the maximum thrust coefficient 119862119883 and the opti-mum sail angle of attack120572optWith the current wind directionand course of the USV the optimum turning angle 120595 can becalculated accordingly Based on the reached optimum sailangle of attack the sail automatic control systemwould adjustthe angle of attack in a reasonable manner Consequently toreveal the relationship between119862119883 and120595 and then reach 120572optand 120595 Figure 5 manifests the aerodynamic characteristic ofthe sail in form of curve In Figure 5 suppose the course ofthe USV passes through the origin of coordinate and thedirection of the relative wind speed 119881119860 coincides with theabscissa of the curve When the value of the relative windangle 120573 is fixed 119862119883 can be reached by projecting one certainpoint 119860 into the course of the USV
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
= 119891 (120572 120582 ]) sin120573 minus 119892 (120572 120582 ]) cos120573(4)
Thus the point 119860 can be treated as 120572opt corresponding to120573 The optimum sail angle of attack 120572opt can be reached asfollows
120597119891
120597120572sin120573 minus120597119892
120597120572cos120573 = 0 (5)
Consequently as shown in Figure 5 180minus(120573+120595) = 90minus120572then the optimum turning angle can be
120595opt = 90 minus 120573 + 120572opt (6)
A
VS VT
VA120572
120573
120573
120595
CX
CL
CY
CD
CL minus CD
Figure 5 Aerodynamic characteristic of the sail in form of curve
243 The Sail Angle of Attack Automatic Adjustment Algo-rithm To design high-quality sail automatic control systemwe propose one novel algorithm named the sail angle ofattack automatic adjustment (Sail 4A) Within the Sail 4Aalgorithm the raw data collected by the sensor system areprocessed via the bubblemethod [30 31] and then the reliabledata are chosen to represent the angle of the actual winddirection then the optimum sail angle of attack is reachedby using the procedure stated in Section 242 followingthat compared with the current sail angle of attack thesail automatic control system would adjust the sail with theamount of the corresponding optimum sail turning angleGenerally sail-assisted facility can be used under certainconditional environment In other words the wind scaleshould live up to one certain range then sail can be in effectaccordingly If the wind scale is small then the sail-assistedUSV cannot fulfill its energy-saving function In the sameway if the wind scale exceeds the endurance of the sail-assisted USV then to ensure the navigation safety it is betterto suspend the sail-assisted function in time Consequently toconsolidate the robustness of our algorithm we have limitedthe ranges of some parameters correspondingly Suppose thethreshold of wind speed ranges from 119881wind min to 119881wind maxif the collected wind speed 119881 is out of the above range thenthe Sail 4A algorithm is terminated automatically
The pseudocode of the Sail 4A algorithm is summarizedin Algorithm 1
Algorithm 1 (Sail 4A)
Input
120579sailmdashthe current absolute angle of sail119862USVmdashthe heading angle of the USV
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 2: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/2.jpg)
2 Mathematical Problems in Engineering
Generous types of sails have been applied in the sail-assisted vessels From the perspective of appearance the sailscan be classified into the jib and square sails [5] And therectangular sail the broad top sail and parallel quadrilateralsail all belong to the square sail When it comes to thematerial the sail can be grouped into the soft sail and hardsail [9] In terms of the cross-sectional shape the sail canbe divided into the wing sail the laminar flow sail thelie back sail and the circular arc sail Based on numeroustunnel experiment analyses it is demonstrated that thecircular arc sail is superior to other sails in aspects of thebest aerodynamic performance the simpler operation andproduction process [10]
Wind power is one environmentally friendly energythat can be used a substitute for the drying up fossil fuel[4] Generous researches have investigated the sail-assistednavigation techniques including the behavior of yacht softsails [11] fluid-structure interaction issues [12] and unsteadyaerodynamic phenomena [13] In [14] a kite modellingapproach into 6 degrees of freedom sailboat dynamic simu-lator was fulfilled following that the performances betweenthe kite and classical rig sailing can be evaluated Fromthe perspective of dynamic simulation [14] stressed kitepropulsion performance from upwind and downwind withone designed keel boat Most of the current studies [11ndash14] concentrated on the soft sail structures of yachts Topromote the wind energy usage taking into account theshipping industry requirements it is vital to develop the hardsail-assisted vessels Thereupon the circular arc hard sail isadopted to carry out the SUICS studies
With the aid of the SUICS the accurate data relatedto the wind can be displayed collected and processedfor the usage of the vessel decision making in real timeand then by using the sail automatic control system thecorrect actions could be instructed promptly The SUICSaims at using the wind energy scientifically and intelligentlyand offering the potential solution to cut down the energyexpenditure of the shipping industry By using the SUICSthe navigation distance of the USV can be extended benefitsfrom the effective use of wind energy No doubt that with theembedded SUICS the energy consumption of the vessels withthe assisted sail can be reduced [15]
The contributions of this work are as follows (1) Designand implement the SUICS to fulfill the effective usage ofthe sustainable wind energy for the sail-assisted USV (2) tointelligently control the sail angle of the attack we proposethe automatic adjustment algorithm for the sail automaticcontrol system of the SUICS (3) to fulfill the human-machineinterface friendly we design the PC platform software forthe SUICS and (4) our designed data frame format is char-acterized by the quite low transmission error rate and fit forthe compact control system and is useful to the communica-tion module of the remote control system
This paper is organized as follows Section 2 demonstratesthemodule design work of the SUICS including the commu-nication system the sensor system the sail automatic controlsystem the PC platform and the low machine platformThen Section 3 elaborates the implement processes of the
Signal
Lower machine platform
Signalcommand
Signalcommand
Sensor system
Wind senor system
Ultrasonic senor system
PC platform
Communication system
Drive system
Sail automatic control system
Figure 1 Logic diagram of the SUICS
SUICS In Section 4 experiments verify the effectiveness ofthe SUCIS Finally Section 5 concludes this paper
2 Design of the Sail-Assisted USVIntelligent Control Systems
The communication system the sensor system the PCplatform and the lower machine platform compose theSUICS Figure 1 shows the logic diagram of the SUICS Thesensor system gathers the real time data including the winddirection and speed and the environment data then by wayof the serial port communication the data are transferred tothe Single Chip Microcomputer (SCM) following that theSCM adjusts the sail angle of attack automatically by usingthe data with the proposed sail angle of attack automaticadjustment algorithm Simultaneously the data are sent tothe PC platform through the communication system the PCplatform would echo data to the user By using the human-machine interface the user could operate the sail throughcommands directly the commands are encapsulated in aframe then the frame will be sent to the lower machineplatform and the lower machine platform parses the frameand executes corresponding actions
By using the SUICS the sail angle of attack can beadjusted adaptively then the sustainable wind energy canbe exploited to the maximum With the aid of the SUICSthe activity domain and time of the sail-assisted USV canbe strengthened benefiting from the energy offered by thesustainable wind Figure 2 depicts the system structurediagram of the SUICS the embedded programming methodis introduced to attain the digital precise control of thesail-assisted USV The design details of the communicationsystem the sensor system the PC platform and the lowermachine platform are sequentially illustrated as shown inFigure 2
Mathematical Problems in Engineering 3
Wind directionsensor
Wind speedsensor
PC platform
MCU
Communicationsystem
Servo motordriver
Servo motor
Sail
Figure 2 System structure diagram of the SUICS
Excellent works have paid attention to the system archi-tectures from floating point to fixed point [16ndash19] includinganalysis of mean-square-error for fixed point FFT units [16]efficient implementation of a spectrum analyzer for fixedpoint architectures [17] quantization analysis and enhance-ment of a VLSI gradient-based motion estimation architec-ture [18] and presentation of robust bioinspired architecturefor optical flow computation [19]When comes to our SUICSas shown in Figure 2 the range of wind speed sensor is from04ms to 450ms with 01ms resolution the resolution ofwind direction sensor is 1∘ the data acquisition cycle is 3 sthe communication model transfer rate is 150Mbps and thecommunication distance is 120m
21 Communication System Within the communication sys-tem the network formation and the data frame based on theTCPIP protocol are stressed
211 Communication Network Formation Generally with awireless network card and an AP set the wireless networkcan be established as one router After the PC platformconnects to above Wi-Fi module the PC can interact withthe low machine platform placed on the USV in real time[20] In the communication protocol the communicationmodule services for the control system and they belong todata link layer and the application layer respectively Withrespect to the control system the communication module istransparent and independent those identities contribute tothe convenience to the data process and the maintenance ofthe platforms [21]
Table 1 Data frame format
Framehead
Subsystemnumber
Equipmentnumber Commanddata Tail
frame
212 Data Frame Based on TCPIP Protocol Our commu-nication system complies with the TCPIP protocol [22] Aspresented in Table 1 we propose one compacted streamlineddata frame format for the small-scale control system Theshorter the length of the data frame format the faster thedata transmission speed By using our data frame format thesystem response speed can be improved and the data conflictcan be reduced When it comes to the data frame solutionthe procedure would take the first judgment of the value ofthe first two bits of the data frame and then process the dataof the small-scale control systemwith one effective data framesolution
22 Data Processing for the Sensor System During the nav-igation process to make sound decisions the sail-assistedUSV should acquire the data related to the wind energyand the environment around itself in real time By usingthe wind speed sensor and the wind direction sensor theraw data are obtained [23] The wind speed equals 171 of itsinitial frequency signal and the wind direction data also canbe reached after being processed by digital filter Then theprocessed data are delivered to the sail controller placed onthe lowermachine platform simultaneouslyWith above datathe sail controller could execute certain actions on the sail andsend the data to the PC platform for display
Owing to the limited space and load capacity of the USVto detect the environment including the obstacles around theUSV the radar is not a viable option definitely Therefore theportable ultrasonic ranging sensor is adopted to overcomeabove limitation We place three ultrasonic ranging sensorsin the bow the port side and the starboard side successivelyFurthermore to expand the detection width under eachsensor we install the microservos to steer the sensors spinConsequently the detection ability of the ultrasonic rangingsensor is strengthened and the collected data are fed back tothe upper machine platform for decision making
23 Design of the PC Platform Software The sail-assistedUSV has combined the semiautonomous model and theremote control model Thus the human-machine interface[24] plays a great role between the PC operator and the sub-systems embedded in the lower machine platform By usingthe human-machine interface the operator could acquirethe dynamic information around the sail-assisted USV andexecute commands on certain equipment with ease Conse-quently the PC platform should satisfy the criteria includingthe friendly human-machine interface the multifunctionalapplications contribute to access to the dynamic informationrelated to the sail-assisted USV Taken above criteria intoaccount within the design process the QT platform [25] isapplied to build the PC platform and the TCPIP protocol[26] is adopted to guarantee the quality and reliability of thecommunication
4 Mathematical Problems in Engineering
U3
P101P112P123P134P145P156P167P178RST9P30(R)10P31(T)11P32(0)12P33(1)13P34(T)14P35(T)15P36(W)16P37(R)17XTAL218XTAL119GND20 P20 21P21 22P22 23P23 24P24 25P25 26P26 27P27 28SPEN 29ALEPR 30EAVPP 31P07 32P06 33P05 34P04 35P03 36P02 37P01 38P00 39VCC 40
IC1
89C52
DB1DB2DB3DB4DB5DB6DB7DB8RSTP30P31CSDAINT1LCDENP35P36P37X2X1
D0D1D2D3D4D5D6D7EAALE
P27DULADIOLAP24FW18B20P21P20
ZDXZDB1DB2DB3DB4DB5DB6DB7DB8
P30P31CSDAINT1LCDENP35P36P37
P20P2118B20FWP24DIOLADULAP27
D0D1D2D3D4D5D6D7
GND
1122334455667788
U0
24X8 P
1122334455667788
U2
24X8 P
1 12 23 34 45 56 67 78 8
U1
24X8 P112 23 34 45 56 67 78 8
24X8 P
Figure 3 The pin of the SCM
24 Design of the Lower Machine Platform
241 Brief Introduction of the Lower Machine Platform Thelower machine platformmainly consists of the sail automaticcontrol system and the drive system and executes the infor-mation related to the control of the sail and the motion of theUSV it is the core part of the SUICS on account of the safetyand performance of the sail-assisted USV The distributedprocessing technology is used to integrate multiple 51 SingleChipMicyoco (SCM) that each SCM dedicates to one specialfunction and actualize the parallel process ability of thesystems embedded in the lower machine platform [27]Following that the information process speed and accuracyof the lower machine platform can be enhanced benefitingfrom the adopted design technologies Figure 3 shows the pinof the SCM
In Figure 3 P0 port is a set of eight-bit open drain bidirec-tional IO port and it is an addressdata busmultiplexer portP1 port is an eight-bit IO port with internal pullups Duringflash programming and program verification P1 receives alow eight-bit address while P2 receives a high-bit addressand other control data P3 port is an eight-bit IO portwith internal pullups In addition to as a general IO portP30(RXD) is a serial port to input P31(TXD) is a serialport to output P32(INT0) is the external interrupt zero portP33(INT1) is the external interrupt one port P34(T0) istimercounter zero P35(T1) is timercounter one P36(WR)is the external data memory write strobe line and P37(RD)is the external data memory read strobe line
Design of the sail automatic control system is stressedin the lower machine platform To design the high-qualitysail automatic control system it is necessary to achieve theoptimum sail angle of attack and then by using the effectivealgorithm to fulfill the automatic adjustment for the sail angleof attack Following that we illustrate the procedure of howto obtain the optimum sail angle of attack and our proposedsail angle of attack automatic adjustment algorithm
FS
FR
FD FH FL
FT VS
VT
VA
120572
120573 120574
120595120579
Figure 4 Force analysis of the sail
242 Procedure to Obtain the Optimum Angle of AttackFigure 4 shows the force analysis of the sail Suppose119881119878119881119879 120579120574119881119860 120573 120572 and120595 represent the speed of the UVS actual windspeed the actual wind direction angle between119881119878 and119881119879 thedrift angle between 119881119878 and the longitudinal axis of the USVrelative wind speed relative wind direction angle between119881119860and 119881119878 the sail angle of attack and the turning angle of thesail between the longitudinal axis of the USV and the sailingstring respectively
When the wind is acting on the sails the sail will generatea lift force perpendicular to the relative wind speed 119865119871and a resistance along the relative wind speed 119865119863 [28 29]119865119879 denotes the thrust parallel to the course of the vesselgenerated by the sail and 119865119867 denotes the transverse forceperpendicular to the direction of the USV Then accordingto the geometrical relationship 119865119879 and 119865119867 can be
119865119879 = 119865119871 sin120573 minus 119865119863 cos120573
119865119867 = 119865119871 cos120573 + 119865119863 sin120573(1)
Mathematical Problems in Engineering 5
After nondimensional process
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
119862119884 = 119862119871 cos120573 + 119862119863 sin120573(2)
The lift coefficient drag coefficient thrust coefficientand cornering ratio are sequentially symbolized as 119862119871 119862119863119862119883 and 119862119884 Suppose 120588 119881 119878 ] 120582 and 120572opt stand for airdensity wind speed sail projected area camber ratio of sailratio of sail and the optimum angle of attack in sequenceAccording to the relationship between the drag coefficientand lift coefficient with the angle of attack aspect ratio andcamber ratio the following functions can be reached
119862119871 = 119891 (120572 120582 ])
119862119863 = 119892 (120572 120582 ])
119862119871 =119865119871
(12) 1205881198812119878
119862119863 =119865119863
(12) 1205881198812119878
119862119883 =119865119879
(12) 1205881198812119878
119862119884 =119865119863
(12) 1205881198812119878
(3)
To make full use of sustainable wind energy it is essentialto obtain the maximum thrust coefficient 119862119883 and the opti-mum sail angle of attack120572optWith the current wind directionand course of the USV the optimum turning angle 120595 can becalculated accordingly Based on the reached optimum sailangle of attack the sail automatic control systemwould adjustthe angle of attack in a reasonable manner Consequently toreveal the relationship between119862119883 and120595 and then reach 120572optand 120595 Figure 5 manifests the aerodynamic characteristic ofthe sail in form of curve In Figure 5 suppose the course ofthe USV passes through the origin of coordinate and thedirection of the relative wind speed 119881119860 coincides with theabscissa of the curve When the value of the relative windangle 120573 is fixed 119862119883 can be reached by projecting one certainpoint 119860 into the course of the USV
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
= 119891 (120572 120582 ]) sin120573 minus 119892 (120572 120582 ]) cos120573(4)
Thus the point 119860 can be treated as 120572opt corresponding to120573 The optimum sail angle of attack 120572opt can be reached asfollows
120597119891
120597120572sin120573 minus120597119892
120597120572cos120573 = 0 (5)
Consequently as shown in Figure 5 180minus(120573+120595) = 90minus120572then the optimum turning angle can be
120595opt = 90 minus 120573 + 120572opt (6)
A
VS VT
VA120572
120573
120573
120595
CX
CL
CY
CD
CL minus CD
Figure 5 Aerodynamic characteristic of the sail in form of curve
243 The Sail Angle of Attack Automatic Adjustment Algo-rithm To design high-quality sail automatic control systemwe propose one novel algorithm named the sail angle ofattack automatic adjustment (Sail 4A) Within the Sail 4Aalgorithm the raw data collected by the sensor system areprocessed via the bubblemethod [30 31] and then the reliabledata are chosen to represent the angle of the actual winddirection then the optimum sail angle of attack is reachedby using the procedure stated in Section 242 followingthat compared with the current sail angle of attack thesail automatic control system would adjust the sail with theamount of the corresponding optimum sail turning angleGenerally sail-assisted facility can be used under certainconditional environment In other words the wind scaleshould live up to one certain range then sail can be in effectaccordingly If the wind scale is small then the sail-assistedUSV cannot fulfill its energy-saving function In the sameway if the wind scale exceeds the endurance of the sail-assisted USV then to ensure the navigation safety it is betterto suspend the sail-assisted function in time Consequently toconsolidate the robustness of our algorithm we have limitedthe ranges of some parameters correspondingly Suppose thethreshold of wind speed ranges from 119881wind min to 119881wind maxif the collected wind speed 119881 is out of the above range thenthe Sail 4A algorithm is terminated automatically
The pseudocode of the Sail 4A algorithm is summarizedin Algorithm 1
Algorithm 1 (Sail 4A)
Input
120579sailmdashthe current absolute angle of sail119862USVmdashthe heading angle of the USV
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 3: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/3.jpg)
Mathematical Problems in Engineering 3
Wind directionsensor
Wind speedsensor
PC platform
MCU
Communicationsystem
Servo motordriver
Servo motor
Sail
Figure 2 System structure diagram of the SUICS
Excellent works have paid attention to the system archi-tectures from floating point to fixed point [16ndash19] includinganalysis of mean-square-error for fixed point FFT units [16]efficient implementation of a spectrum analyzer for fixedpoint architectures [17] quantization analysis and enhance-ment of a VLSI gradient-based motion estimation architec-ture [18] and presentation of robust bioinspired architecturefor optical flow computation [19]When comes to our SUICSas shown in Figure 2 the range of wind speed sensor is from04ms to 450ms with 01ms resolution the resolution ofwind direction sensor is 1∘ the data acquisition cycle is 3 sthe communication model transfer rate is 150Mbps and thecommunication distance is 120m
21 Communication System Within the communication sys-tem the network formation and the data frame based on theTCPIP protocol are stressed
211 Communication Network Formation Generally with awireless network card and an AP set the wireless networkcan be established as one router After the PC platformconnects to above Wi-Fi module the PC can interact withthe low machine platform placed on the USV in real time[20] In the communication protocol the communicationmodule services for the control system and they belong todata link layer and the application layer respectively Withrespect to the control system the communication module istransparent and independent those identities contribute tothe convenience to the data process and the maintenance ofthe platforms [21]
Table 1 Data frame format
Framehead
Subsystemnumber
Equipmentnumber Commanddata Tail
frame
212 Data Frame Based on TCPIP Protocol Our commu-nication system complies with the TCPIP protocol [22] Aspresented in Table 1 we propose one compacted streamlineddata frame format for the small-scale control system Theshorter the length of the data frame format the faster thedata transmission speed By using our data frame format thesystem response speed can be improved and the data conflictcan be reduced When it comes to the data frame solutionthe procedure would take the first judgment of the value ofthe first two bits of the data frame and then process the dataof the small-scale control systemwith one effective data framesolution
22 Data Processing for the Sensor System During the nav-igation process to make sound decisions the sail-assistedUSV should acquire the data related to the wind energyand the environment around itself in real time By usingthe wind speed sensor and the wind direction sensor theraw data are obtained [23] The wind speed equals 171 of itsinitial frequency signal and the wind direction data also canbe reached after being processed by digital filter Then theprocessed data are delivered to the sail controller placed onthe lowermachine platform simultaneouslyWith above datathe sail controller could execute certain actions on the sail andsend the data to the PC platform for display
Owing to the limited space and load capacity of the USVto detect the environment including the obstacles around theUSV the radar is not a viable option definitely Therefore theportable ultrasonic ranging sensor is adopted to overcomeabove limitation We place three ultrasonic ranging sensorsin the bow the port side and the starboard side successivelyFurthermore to expand the detection width under eachsensor we install the microservos to steer the sensors spinConsequently the detection ability of the ultrasonic rangingsensor is strengthened and the collected data are fed back tothe upper machine platform for decision making
23 Design of the PC Platform Software The sail-assistedUSV has combined the semiautonomous model and theremote control model Thus the human-machine interface[24] plays a great role between the PC operator and the sub-systems embedded in the lower machine platform By usingthe human-machine interface the operator could acquirethe dynamic information around the sail-assisted USV andexecute commands on certain equipment with ease Conse-quently the PC platform should satisfy the criteria includingthe friendly human-machine interface the multifunctionalapplications contribute to access to the dynamic informationrelated to the sail-assisted USV Taken above criteria intoaccount within the design process the QT platform [25] isapplied to build the PC platform and the TCPIP protocol[26] is adopted to guarantee the quality and reliability of thecommunication
4 Mathematical Problems in Engineering
U3
P101P112P123P134P145P156P167P178RST9P30(R)10P31(T)11P32(0)12P33(1)13P34(T)14P35(T)15P36(W)16P37(R)17XTAL218XTAL119GND20 P20 21P21 22P22 23P23 24P24 25P25 26P26 27P27 28SPEN 29ALEPR 30EAVPP 31P07 32P06 33P05 34P04 35P03 36P02 37P01 38P00 39VCC 40
IC1
89C52
DB1DB2DB3DB4DB5DB6DB7DB8RSTP30P31CSDAINT1LCDENP35P36P37X2X1
D0D1D2D3D4D5D6D7EAALE
P27DULADIOLAP24FW18B20P21P20
ZDXZDB1DB2DB3DB4DB5DB6DB7DB8
P30P31CSDAINT1LCDENP35P36P37
P20P2118B20FWP24DIOLADULAP27
D0D1D2D3D4D5D6D7
GND
1122334455667788
U0
24X8 P
1122334455667788
U2
24X8 P
1 12 23 34 45 56 67 78 8
U1
24X8 P112 23 34 45 56 67 78 8
24X8 P
Figure 3 The pin of the SCM
24 Design of the Lower Machine Platform
241 Brief Introduction of the Lower Machine Platform Thelower machine platformmainly consists of the sail automaticcontrol system and the drive system and executes the infor-mation related to the control of the sail and the motion of theUSV it is the core part of the SUICS on account of the safetyand performance of the sail-assisted USV The distributedprocessing technology is used to integrate multiple 51 SingleChipMicyoco (SCM) that each SCM dedicates to one specialfunction and actualize the parallel process ability of thesystems embedded in the lower machine platform [27]Following that the information process speed and accuracyof the lower machine platform can be enhanced benefitingfrom the adopted design technologies Figure 3 shows the pinof the SCM
In Figure 3 P0 port is a set of eight-bit open drain bidirec-tional IO port and it is an addressdata busmultiplexer portP1 port is an eight-bit IO port with internal pullups Duringflash programming and program verification P1 receives alow eight-bit address while P2 receives a high-bit addressand other control data P3 port is an eight-bit IO portwith internal pullups In addition to as a general IO portP30(RXD) is a serial port to input P31(TXD) is a serialport to output P32(INT0) is the external interrupt zero portP33(INT1) is the external interrupt one port P34(T0) istimercounter zero P35(T1) is timercounter one P36(WR)is the external data memory write strobe line and P37(RD)is the external data memory read strobe line
Design of the sail automatic control system is stressedin the lower machine platform To design the high-qualitysail automatic control system it is necessary to achieve theoptimum sail angle of attack and then by using the effectivealgorithm to fulfill the automatic adjustment for the sail angleof attack Following that we illustrate the procedure of howto obtain the optimum sail angle of attack and our proposedsail angle of attack automatic adjustment algorithm
FS
FR
FD FH FL
FT VS
VT
VA
120572
120573 120574
120595120579
Figure 4 Force analysis of the sail
242 Procedure to Obtain the Optimum Angle of AttackFigure 4 shows the force analysis of the sail Suppose119881119878119881119879 120579120574119881119860 120573 120572 and120595 represent the speed of the UVS actual windspeed the actual wind direction angle between119881119878 and119881119879 thedrift angle between 119881119878 and the longitudinal axis of the USVrelative wind speed relative wind direction angle between119881119860and 119881119878 the sail angle of attack and the turning angle of thesail between the longitudinal axis of the USV and the sailingstring respectively
When the wind is acting on the sails the sail will generatea lift force perpendicular to the relative wind speed 119865119871and a resistance along the relative wind speed 119865119863 [28 29]119865119879 denotes the thrust parallel to the course of the vesselgenerated by the sail and 119865119867 denotes the transverse forceperpendicular to the direction of the USV Then accordingto the geometrical relationship 119865119879 and 119865119867 can be
119865119879 = 119865119871 sin120573 minus 119865119863 cos120573
119865119867 = 119865119871 cos120573 + 119865119863 sin120573(1)
Mathematical Problems in Engineering 5
After nondimensional process
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
119862119884 = 119862119871 cos120573 + 119862119863 sin120573(2)
The lift coefficient drag coefficient thrust coefficientand cornering ratio are sequentially symbolized as 119862119871 119862119863119862119883 and 119862119884 Suppose 120588 119881 119878 ] 120582 and 120572opt stand for airdensity wind speed sail projected area camber ratio of sailratio of sail and the optimum angle of attack in sequenceAccording to the relationship between the drag coefficientand lift coefficient with the angle of attack aspect ratio andcamber ratio the following functions can be reached
119862119871 = 119891 (120572 120582 ])
119862119863 = 119892 (120572 120582 ])
119862119871 =119865119871
(12) 1205881198812119878
119862119863 =119865119863
(12) 1205881198812119878
119862119883 =119865119879
(12) 1205881198812119878
119862119884 =119865119863
(12) 1205881198812119878
(3)
To make full use of sustainable wind energy it is essentialto obtain the maximum thrust coefficient 119862119883 and the opti-mum sail angle of attack120572optWith the current wind directionand course of the USV the optimum turning angle 120595 can becalculated accordingly Based on the reached optimum sailangle of attack the sail automatic control systemwould adjustthe angle of attack in a reasonable manner Consequently toreveal the relationship between119862119883 and120595 and then reach 120572optand 120595 Figure 5 manifests the aerodynamic characteristic ofthe sail in form of curve In Figure 5 suppose the course ofthe USV passes through the origin of coordinate and thedirection of the relative wind speed 119881119860 coincides with theabscissa of the curve When the value of the relative windangle 120573 is fixed 119862119883 can be reached by projecting one certainpoint 119860 into the course of the USV
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
= 119891 (120572 120582 ]) sin120573 minus 119892 (120572 120582 ]) cos120573(4)
Thus the point 119860 can be treated as 120572opt corresponding to120573 The optimum sail angle of attack 120572opt can be reached asfollows
120597119891
120597120572sin120573 minus120597119892
120597120572cos120573 = 0 (5)
Consequently as shown in Figure 5 180minus(120573+120595) = 90minus120572then the optimum turning angle can be
120595opt = 90 minus 120573 + 120572opt (6)
A
VS VT
VA120572
120573
120573
120595
CX
CL
CY
CD
CL minus CD
Figure 5 Aerodynamic characteristic of the sail in form of curve
243 The Sail Angle of Attack Automatic Adjustment Algo-rithm To design high-quality sail automatic control systemwe propose one novel algorithm named the sail angle ofattack automatic adjustment (Sail 4A) Within the Sail 4Aalgorithm the raw data collected by the sensor system areprocessed via the bubblemethod [30 31] and then the reliabledata are chosen to represent the angle of the actual winddirection then the optimum sail angle of attack is reachedby using the procedure stated in Section 242 followingthat compared with the current sail angle of attack thesail automatic control system would adjust the sail with theamount of the corresponding optimum sail turning angleGenerally sail-assisted facility can be used under certainconditional environment In other words the wind scaleshould live up to one certain range then sail can be in effectaccordingly If the wind scale is small then the sail-assistedUSV cannot fulfill its energy-saving function In the sameway if the wind scale exceeds the endurance of the sail-assisted USV then to ensure the navigation safety it is betterto suspend the sail-assisted function in time Consequently toconsolidate the robustness of our algorithm we have limitedthe ranges of some parameters correspondingly Suppose thethreshold of wind speed ranges from 119881wind min to 119881wind maxif the collected wind speed 119881 is out of the above range thenthe Sail 4A algorithm is terminated automatically
The pseudocode of the Sail 4A algorithm is summarizedin Algorithm 1
Algorithm 1 (Sail 4A)
Input
120579sailmdashthe current absolute angle of sail119862USVmdashthe heading angle of the USV
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 4: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/4.jpg)
4 Mathematical Problems in Engineering
U3
P101P112P123P134P145P156P167P178RST9P30(R)10P31(T)11P32(0)12P33(1)13P34(T)14P35(T)15P36(W)16P37(R)17XTAL218XTAL119GND20 P20 21P21 22P22 23P23 24P24 25P25 26P26 27P27 28SPEN 29ALEPR 30EAVPP 31P07 32P06 33P05 34P04 35P03 36P02 37P01 38P00 39VCC 40
IC1
89C52
DB1DB2DB3DB4DB5DB6DB7DB8RSTP30P31CSDAINT1LCDENP35P36P37X2X1
D0D1D2D3D4D5D6D7EAALE
P27DULADIOLAP24FW18B20P21P20
ZDXZDB1DB2DB3DB4DB5DB6DB7DB8
P30P31CSDAINT1LCDENP35P36P37
P20P2118B20FWP24DIOLADULAP27
D0D1D2D3D4D5D6D7
GND
1122334455667788
U0
24X8 P
1122334455667788
U2
24X8 P
1 12 23 34 45 56 67 78 8
U1
24X8 P112 23 34 45 56 67 78 8
24X8 P
Figure 3 The pin of the SCM
24 Design of the Lower Machine Platform
241 Brief Introduction of the Lower Machine Platform Thelower machine platformmainly consists of the sail automaticcontrol system and the drive system and executes the infor-mation related to the control of the sail and the motion of theUSV it is the core part of the SUICS on account of the safetyand performance of the sail-assisted USV The distributedprocessing technology is used to integrate multiple 51 SingleChipMicyoco (SCM) that each SCM dedicates to one specialfunction and actualize the parallel process ability of thesystems embedded in the lower machine platform [27]Following that the information process speed and accuracyof the lower machine platform can be enhanced benefitingfrom the adopted design technologies Figure 3 shows the pinof the SCM
In Figure 3 P0 port is a set of eight-bit open drain bidirec-tional IO port and it is an addressdata busmultiplexer portP1 port is an eight-bit IO port with internal pullups Duringflash programming and program verification P1 receives alow eight-bit address while P2 receives a high-bit addressand other control data P3 port is an eight-bit IO portwith internal pullups In addition to as a general IO portP30(RXD) is a serial port to input P31(TXD) is a serialport to output P32(INT0) is the external interrupt zero portP33(INT1) is the external interrupt one port P34(T0) istimercounter zero P35(T1) is timercounter one P36(WR)is the external data memory write strobe line and P37(RD)is the external data memory read strobe line
Design of the sail automatic control system is stressedin the lower machine platform To design the high-qualitysail automatic control system it is necessary to achieve theoptimum sail angle of attack and then by using the effectivealgorithm to fulfill the automatic adjustment for the sail angleof attack Following that we illustrate the procedure of howto obtain the optimum sail angle of attack and our proposedsail angle of attack automatic adjustment algorithm
FS
FR
FD FH FL
FT VS
VT
VA
120572
120573 120574
120595120579
Figure 4 Force analysis of the sail
242 Procedure to Obtain the Optimum Angle of AttackFigure 4 shows the force analysis of the sail Suppose119881119878119881119879 120579120574119881119860 120573 120572 and120595 represent the speed of the UVS actual windspeed the actual wind direction angle between119881119878 and119881119879 thedrift angle between 119881119878 and the longitudinal axis of the USVrelative wind speed relative wind direction angle between119881119860and 119881119878 the sail angle of attack and the turning angle of thesail between the longitudinal axis of the USV and the sailingstring respectively
When the wind is acting on the sails the sail will generatea lift force perpendicular to the relative wind speed 119865119871and a resistance along the relative wind speed 119865119863 [28 29]119865119879 denotes the thrust parallel to the course of the vesselgenerated by the sail and 119865119867 denotes the transverse forceperpendicular to the direction of the USV Then accordingto the geometrical relationship 119865119879 and 119865119867 can be
119865119879 = 119865119871 sin120573 minus 119865119863 cos120573
119865119867 = 119865119871 cos120573 + 119865119863 sin120573(1)
Mathematical Problems in Engineering 5
After nondimensional process
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
119862119884 = 119862119871 cos120573 + 119862119863 sin120573(2)
The lift coefficient drag coefficient thrust coefficientand cornering ratio are sequentially symbolized as 119862119871 119862119863119862119883 and 119862119884 Suppose 120588 119881 119878 ] 120582 and 120572opt stand for airdensity wind speed sail projected area camber ratio of sailratio of sail and the optimum angle of attack in sequenceAccording to the relationship between the drag coefficientand lift coefficient with the angle of attack aspect ratio andcamber ratio the following functions can be reached
119862119871 = 119891 (120572 120582 ])
119862119863 = 119892 (120572 120582 ])
119862119871 =119865119871
(12) 1205881198812119878
119862119863 =119865119863
(12) 1205881198812119878
119862119883 =119865119879
(12) 1205881198812119878
119862119884 =119865119863
(12) 1205881198812119878
(3)
To make full use of sustainable wind energy it is essentialto obtain the maximum thrust coefficient 119862119883 and the opti-mum sail angle of attack120572optWith the current wind directionand course of the USV the optimum turning angle 120595 can becalculated accordingly Based on the reached optimum sailangle of attack the sail automatic control systemwould adjustthe angle of attack in a reasonable manner Consequently toreveal the relationship between119862119883 and120595 and then reach 120572optand 120595 Figure 5 manifests the aerodynamic characteristic ofthe sail in form of curve In Figure 5 suppose the course ofthe USV passes through the origin of coordinate and thedirection of the relative wind speed 119881119860 coincides with theabscissa of the curve When the value of the relative windangle 120573 is fixed 119862119883 can be reached by projecting one certainpoint 119860 into the course of the USV
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
= 119891 (120572 120582 ]) sin120573 minus 119892 (120572 120582 ]) cos120573(4)
Thus the point 119860 can be treated as 120572opt corresponding to120573 The optimum sail angle of attack 120572opt can be reached asfollows
120597119891
120597120572sin120573 minus120597119892
120597120572cos120573 = 0 (5)
Consequently as shown in Figure 5 180minus(120573+120595) = 90minus120572then the optimum turning angle can be
120595opt = 90 minus 120573 + 120572opt (6)
A
VS VT
VA120572
120573
120573
120595
CX
CL
CY
CD
CL minus CD
Figure 5 Aerodynamic characteristic of the sail in form of curve
243 The Sail Angle of Attack Automatic Adjustment Algo-rithm To design high-quality sail automatic control systemwe propose one novel algorithm named the sail angle ofattack automatic adjustment (Sail 4A) Within the Sail 4Aalgorithm the raw data collected by the sensor system areprocessed via the bubblemethod [30 31] and then the reliabledata are chosen to represent the angle of the actual winddirection then the optimum sail angle of attack is reachedby using the procedure stated in Section 242 followingthat compared with the current sail angle of attack thesail automatic control system would adjust the sail with theamount of the corresponding optimum sail turning angleGenerally sail-assisted facility can be used under certainconditional environment In other words the wind scaleshould live up to one certain range then sail can be in effectaccordingly If the wind scale is small then the sail-assistedUSV cannot fulfill its energy-saving function In the sameway if the wind scale exceeds the endurance of the sail-assisted USV then to ensure the navigation safety it is betterto suspend the sail-assisted function in time Consequently toconsolidate the robustness of our algorithm we have limitedthe ranges of some parameters correspondingly Suppose thethreshold of wind speed ranges from 119881wind min to 119881wind maxif the collected wind speed 119881 is out of the above range thenthe Sail 4A algorithm is terminated automatically
The pseudocode of the Sail 4A algorithm is summarizedin Algorithm 1
Algorithm 1 (Sail 4A)
Input
120579sailmdashthe current absolute angle of sail119862USVmdashthe heading angle of the USV
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 5: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/5.jpg)
Mathematical Problems in Engineering 5
After nondimensional process
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
119862119884 = 119862119871 cos120573 + 119862119863 sin120573(2)
The lift coefficient drag coefficient thrust coefficientand cornering ratio are sequentially symbolized as 119862119871 119862119863119862119883 and 119862119884 Suppose 120588 119881 119878 ] 120582 and 120572opt stand for airdensity wind speed sail projected area camber ratio of sailratio of sail and the optimum angle of attack in sequenceAccording to the relationship between the drag coefficientand lift coefficient with the angle of attack aspect ratio andcamber ratio the following functions can be reached
119862119871 = 119891 (120572 120582 ])
119862119863 = 119892 (120572 120582 ])
119862119871 =119865119871
(12) 1205881198812119878
119862119863 =119865119863
(12) 1205881198812119878
119862119883 =119865119879
(12) 1205881198812119878
119862119884 =119865119863
(12) 1205881198812119878
(3)
To make full use of sustainable wind energy it is essentialto obtain the maximum thrust coefficient 119862119883 and the opti-mum sail angle of attack120572optWith the current wind directionand course of the USV the optimum turning angle 120595 can becalculated accordingly Based on the reached optimum sailangle of attack the sail automatic control systemwould adjustthe angle of attack in a reasonable manner Consequently toreveal the relationship between119862119883 and120595 and then reach 120572optand 120595 Figure 5 manifests the aerodynamic characteristic ofthe sail in form of curve In Figure 5 suppose the course ofthe USV passes through the origin of coordinate and thedirection of the relative wind speed 119881119860 coincides with theabscissa of the curve When the value of the relative windangle 120573 is fixed 119862119883 can be reached by projecting one certainpoint 119860 into the course of the USV
119862119883 = 119862119871 sin120573 minus 119862119863 cos120573
= 119891 (120572 120582 ]) sin120573 minus 119892 (120572 120582 ]) cos120573(4)
Thus the point 119860 can be treated as 120572opt corresponding to120573 The optimum sail angle of attack 120572opt can be reached asfollows
120597119891
120597120572sin120573 minus120597119892
120597120572cos120573 = 0 (5)
Consequently as shown in Figure 5 180minus(120573+120595) = 90minus120572then the optimum turning angle can be
120595opt = 90 minus 120573 + 120572opt (6)
A
VS VT
VA120572
120573
120573
120595
CX
CL
CY
CD
CL minus CD
Figure 5 Aerodynamic characteristic of the sail in form of curve
243 The Sail Angle of Attack Automatic Adjustment Algo-rithm To design high-quality sail automatic control systemwe propose one novel algorithm named the sail angle ofattack automatic adjustment (Sail 4A) Within the Sail 4Aalgorithm the raw data collected by the sensor system areprocessed via the bubblemethod [30 31] and then the reliabledata are chosen to represent the angle of the actual winddirection then the optimum sail angle of attack is reachedby using the procedure stated in Section 242 followingthat compared with the current sail angle of attack thesail automatic control system would adjust the sail with theamount of the corresponding optimum sail turning angleGenerally sail-assisted facility can be used under certainconditional environment In other words the wind scaleshould live up to one certain range then sail can be in effectaccordingly If the wind scale is small then the sail-assistedUSV cannot fulfill its energy-saving function In the sameway if the wind scale exceeds the endurance of the sail-assisted USV then to ensure the navigation safety it is betterto suspend the sail-assisted function in time Consequently toconsolidate the robustness of our algorithm we have limitedthe ranges of some parameters correspondingly Suppose thethreshold of wind speed ranges from 119881wind min to 119881wind maxif the collected wind speed 119881 is out of the above range thenthe Sail 4A algorithm is terminated automatically
The pseudocode of the Sail 4A algorithm is summarizedin Algorithm 1
Algorithm 1 (Sail 4A)
Input
120579sailmdashthe current absolute angle of sail119862USVmdashthe heading angle of the USV
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 6: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/6.jpg)
6 Mathematical Problems in Engineering
120572mdashthe sail angle of attackDirwindmdashthe current wind direction
Parameters
119873mdashthe number of wind direction data119881windmdashcollected wind speedDatasetmdashcollection of 20 sets of datadata119894mdashthe 119894th wind direction data 119894 = 1 2 3 4avgvalmdashthe average value of four sets of data120573mdashthe relative wind direction angle between 119881119860 and119881119878120572optmdashthe optimal sail angle of attack120595optmdashthe optimal turning angleΔ anglemdashthe allowed turning angle error(1) DataDeal(120579sail 119862USV 120572 Dirwind)(2) lowastPerform the following operations for eachDataDeallowast(3) lowastInitialize data119894 by performing Sort()lowast(4)119873 = 119873 + 1(5) if 119873 == 20(6) Sort(Dataset)(7) if 119881wind lt 119881wind min or 119881wind gt 119881wind max
(8) then return Terminate the Sail 4A algo-rithm(9) end(10) lowastCalculate the optimal angle of attacklowast(11) avgval = sum(data119894)4(12) 120572opt calculated by equation (5)(13) 120573 = avgval minus 120572opt(14) 120595opt = 90 minus 120573 + 120572opt(15) lowast Adjust the angle of attack lowast(16) while 120572 minus 120572opt gt Δ angle do(17) 120572 = 120572 minus Δ angle
(18) end while(19) while 120572 minus 120572opt lt minusΔ angle do(20) 120572 = 120572 + Δ angle
(21) end while(22) end if
As shown in the Sail 4A algorithm if the wind scale isnot fit for the sail-assisted application then the algorithmis suspended The data size 119873 can be adjusted according tothe requirements of the SUICS Referring to the number ofwind direction data119873 after several times of sail-assistedUSVtrials we find that119873 = 20 is enough for the experiments
Generally the ranges of the parameters related to the sail-assisted algorithm Sail 4A are determined by wind tunneltest According to wind tunnel test reported in [4] the usable
range of the sail attack angle 120572 is between minus5∘ and 90∘ 120579sail119862USV Dirwind 119881wind and 120572 are measured by our sensorsystems After a certain number of data collections Dataset isreached Consequently data119894 avgval and120573 can be obtained byway of computing 120572opt and120595opt are reached by the embeddedfunctions of several commercial software programs includingMatlab and Lingo
By using the collected data with the aid of our algorithmwhen the optimum sail angle of attack 120572opt is reached theoptimal turn angle can be realized within the acceptableerror Δ angle Referring to the complexity of our algorithmthe increased calculation time mainly generated from threeparts The first part is generated from the time used forprocessing the collected data based on the bubble methodwith complexity of 119873 times 119873 (119873 is the data size) The secondpart is the time to compute the optimum sail angle of attack120572optThe third part is the time to adjust the sail angle of attackAs the optimum sail angle of attack 120572opt can be obtainedthrough certain embedded functions in several commercialsoftware programs such as Matlab and Lingo then the valueof 120572opt can be achieved by using their embedded functionsinstantaneously When it comes to the adjustment time itis related to the mechanical behavior of the equipmentit takes little time to realize the optimum sail angle ofattack in essence Consequently it can be obtained that thecomputational time complexity is equal to 119874(119873 times 119873)
3 The Implementation Process of the SUICS
31 Implementation of the Communication System Generousresearchers have stressed the work related to the machinevision by using the microprocessors Reference [32] imple-mented a low cost matching motion estimation sensor basedon theNios IImicroprocessor By using a custom instruction-based paradigmon aNios IImicroprocessor [33] successfullyaccelerated the block-matching algorithms Many sensorshave been applied to the industrial fields [34] fulfilledautomated guided vehicle system based on laser guidanceand automatic parking system was introduced in [35] withthe aid of bioinspired 1D optical flow sensors
Referring to the SUICS our communication systemadopts the CHD-T5 Wi-Fi video module which is compat-ible with IEEEE80211bgn standard Compared with othersimilar Wi-Fi modules including the advanced LSD4WF-2MD05107 Wi-Fi module CHD-T5 Wi-Fi has lots of advan-tages over other similar Wi-Fi modules Firstly our modulesupports generous functions including Wi-Fi to video Wi-Fi to serial port Wi-Fi to GPIO and Wi-Fi to I2C Freedrive USB camera can access our module and collect wirelessvideo data Following that taking into account that CHD-T5 is compatible with lots of models including AP STA andAP amp STA CHD-T5 satisfies with the requirements of a vari-ety of application environments Based on MIPS24KE ourcommunication system has the clock speed up to 360MHz(the wireless rate of the Wi-Fi is 150Mbps) and 256MbitSDRAM Finally compared to some other Wi-Fi modules onthemarket including the popular LSD4WF-2MD05107Wi-Fimodule the CHD-T5 is smaller andmore powerful and has a
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 7: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/7.jpg)
Mathematical Problems in Engineering 7
DC5V
GND
GND
R9
WIFI_LED
RESET_KEY
R10
GND
USB+USBminus
USBminusUSB+
DC5V
C7
GND
GND
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J1
USB
Sys_LED
R8
VCC 1DATAminus
2DATA+ 3
GND 4GND 5
GND 5J2
USB
100RR11
RXDTXD
R13
Power LED
GND
GND
FB 5
GN
D2
RUN1VIN4 SW 3U1
MT3410
L1
R1
GND GNDGND GNDGND GND
R2
C5 C6C2 C3 C4
C8
TXDRXD
12345
J3
SIP5
DC5VUSB camera
UART
VCC33_IN1WLAN_LED2RTS3CTS4RXD5TXD6SNAP_KEY7RESTART8GPIO09VCC18_OUT10VCC33_IN11GND12SYS_LED13RESET_KEY14
NC 28NC 27NC 26NC 25NC 24NC 23NC 22NC 21NC 20NC 19NC 18NC 17
USB+ 16USBminus 15
NC 30NC 29NC 31NC 32
CHD05
CHD05
Core
33 V 33 V
33 V
33 V
22 uF
22 uF
22 uF100 nf
100 nf
100 nF
22 pF118 K 1
536 K 1
1K
1K
1K
10 K
22 uH
Power 5Vrarr 33 V
Figure 6 Schematic diagram of bottom plate of the communication system
larger data throughput It is widely used in image analysispipeline endoscopy intelligent robots and other fields Byvirtue of the excellent hardware performance our commu-nication system can achieve video image transmission withvarious formats and resolution support the free-drive camerawith the USB UVC standard and provide various videoperformance parameters adjustment interfaces
Figure 6 show the schematic diagram of bottom plateof the communication system Within Figure 6 SYS LEDis the system indicator it would flash when it is controlledand it will flash for 3 s when under the boot moduleRUN LED is often bright under AP mode it is often brightwhen connected to router under STA mode successfullyRFS KEY restores the factory settings when it is pressed for5 s SNAP KEY is the camera button after the trigger photosare sent to all the connections to the client TXD is the serialport to send RXD is the serial port to accept
32 Implementation of the Senor System
321 Implementation of the Wind Sensor System The windsensors mounted on our sail-assisted USV belong to thehand-held devices One default is that the wind directionand speed cannot be transferred in the form of electricalsignals receivable by other controllers Therefore we have
Figure 7 The wind sensor system of the SUICS
redesigned the wind direction and speed sensors based onthe mechanical structure of the instruments When it comesto the wind direction sensor as the wind vane senses thewind direction the rotary potentiometer drives and generatesthe linear resistance value and obtains corresponding winddirection by using the AD conversion The wind speed isreached by above similar approach Figure 7 shows theredesigned wind sensor system installed on the stem of oursail-assisted USV
322 Implementation of the Ultrasonic Sensor System Theultrasonic module adopts the HC-SR04 module Its productparameters are presented as follows Its typical operatingvoltage is 5 V ultrasmall static operating current is less than
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 8: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/8.jpg)
8 Mathematical Problems in Engineering
Figure 8 Ultrasonic distance measuring module
Figure 9 PC software screenshot
2mA induction angle is no more than 15∘ detection rangeis from 2 cm to 400 cm and high precision can be up to03 cm and is completely compatible with the GH-311 securitymodule Figure 8 shows the developed ultrasonic sensorsystem in our SUICS
Working principle of the ultrasonic sensor system isillustrated as follows At first IO is used to trigger rangewhile the high level signal at least lasts for 10120583s Then thesystem automatically sends 40KHz square wave 8 times anddetects whether there is a signal returned Once the signalreturned the duration time of the high level signal can berecorded as the time of the ultrasonic wave from launch toreturn Consequently the range can be 12 of the above timemultiplied by the acoustic velocity
33 Implementation of the PC Platform According to thedesign introduced in Section 23 the PC platform hasbeen implemented as shown in Figure 9 Our PC softwareinterface is divided into 6 functional modules Module 1 isthe communication connection module which is used toconnect the host computer and the communication systemModule 2 is the wind speed and direction information displaywindow the ldquoCorrectrdquo button is used to initialize and correctthe wind sensors Module 3 is an USV control module themodule includes two drag bars which is used to control thespeed and direction of the USV Module 4 is the sail anglecontrol module which is used to view and manually controlthe angle of attack Module 5 is the track display modulewhich is used to track the trajectory of the track Module 6 is
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 9: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/9.jpg)
Mathematical Problems in Engineering 9
+5
+12
12345678
H11
H8
D71N4007
D3
1N4007
D4
D8
D5 D6
1N4007
D9 D10
1N4007
+5
C1
+5
D1R
R1
EN A6
EN B11
IN15
IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U2
L298N
12
H1
12
H6
12
H3
+5
12
H4
C2
12
H2
H
+Vin1FEEDBACK 4
GN
D3
EN5
OUT 2
LM1
L1
L1
D2SK54B
+5
12345678
H12
H8
D15
1N4007
D111N4007
D12
D16
D13 D14
1N4007
D17 D18
1N4007
+5
EN A6
EN B11
IN15IN27IN310IN412 OUT1 2
OUT2 3OUT3 13OUT4 14
ISEN A 1
ISEN B 15
VS 4VSS 9
GND8
U3
L298N12
H10
12
H8
12
H7
H +12
IN11
IN22
IN33
IN44
IN55
IN66
IN77
OUT1 16
OUT3 14
OUT4 13
OUT5 12
OUT6 11
OUT7 10
OUT2 15
COM 9GND8
U4
ULN2003L
12
3
45
6
S1
SW-DPDT-6
+12VCC
VCC
VCC1
Dminus2
D+3
GND4
U1
USB
+5
123
JP1
Header 3
VCC
VCC
C3
VCC
12345
JP2
Header 5
12345
JP7
Header 5
VCC
12
H5
+5
12
H9
+5
U3
100uF+
++
100 uF100 uF 1K
Figure 10 Principle diagram of drive module
Figure 11 Overall figure of the test boat
an obstacle display module which can display the obstaclesaround the vehicle
34 Implementation of the Drive System
341 Implementation of the Servo Module When it comesto the servo the control signal is entered into the signalmodulation chip by the channel of the receiver and the DCbias voltage is obtained It has an internal reference circuitthat produces a reference signal with a period of 20ms andwidth of 15m Then comparing the voltage of the DC biaswith the voltage of the potentiometer the output voltagedifference can be calculated Finally the difference betweenthe positive and negative output voltage is 0 then the motorwould stop operating
342 Implementation of the Servo Drive Module The princi-ple diagramof the servo drivemodule is shown in Figure 10 Itcan be seen that the servo drive module integrates two chipswith the type of L298N and could drive four DC motors or
two stepper motors Meanwhile the servo drive module alsointegrates one ULN2003 that can drive a stepper motor orfour DCmotors Also the DC-DC LM2596 chip the steeringengine interface and the USB socket are integrated in theservo drive module
4 Experiments of the Sail-AssistedUSV with the SUICS
41 Experiment Scheme As shown in Figure 11 by usingour laboratory USV the SUICS has been designed andimplemented according to the details illustrated in Sections2 and 3
To validate the performance of the SUICS the water testsshould be carried out reasonably under the sound experimentscheme In addition to the SUICS our sail-assisted USVhas been equipped with the GPS and other auxiliary sets toensure that the experiments are conducted smoothly Theexperiment scheme is listed as follows
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 10: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/10.jpg)
10 Mathematical Problems in Engineering
Table 2 Wind speed and direction that the sail-assisted USVexperienced
Time Wind direction (∘) Wind speed (ms) Wave height (m)155631 2925 01 0155633 2925 02 0155637 3375 00 0155639 3375 00 0155642 3375 00 0155649 315 01 0155653 315 02 0155655 3375 08 01155659 0 018 0155701 0 026 01155704 0 029 01155708 3375 032 01155711 3375 033 01155714 0 029 01155718 45 035 01155720 675 036 01155723 45 030 01155727 45 030 01155733 675 00 0155733 675 019 0155736 675 018 0155740 90 023 01155742 90 030 01155746 1125 028 01155749 135 015 0155752 270 05 01155755 2925 015 0155758 315 011 0155801 2925 00 0155804 315 047 01155808 0 038 01155811 45 045 01155814 675 028 01155817 225 00 0155820 225 07 01155824 0 014 0155826 3375 016 0155829 315 018 0155832 3375 00 0155836 3375 05 01
Firstly we install the SUICS on our sail-assisted USV andoperate the sail in the lake or tank automatically andmanuallyunder wind condition Following that the USV could moveforward and turn left and right with the aid of the sail Duringnavigation by using the SUICS the wind data are recordedand the optimum sail angle of attack can be calculated underdifferent scenarios Finally the sustainable wind energy canbe efficiently used by steering to the optimum sail angle ofattack
Table 3 Trajectory coordinates of the sail-assisted USV
Time Latitude Longitude155631 30∘361015840471210158401015840N 114∘211015840050510158401015840E155637 30∘361015840469110158401015840N 114∘211015840051510158401015840E155643 30∘361015840466910158401015840N 114∘211015840052610158401015840E155649 30∘361015840468410158401015840N 114∘211015840056210158401015840E155655 30∘361015840469510158401015840N 114∘211015840056810158401015840E155701 30∘361015840471410158401015840N 114∘211015840056110158401015840E155707 30∘361015840472510158401015840N 114∘211015840053710158401015840E155713 30∘361015840471910158401015840N 114∘211015840052310158401015840E155719 30∘361015840470410158401015840N 114∘211015840052510158401015840E155725 30∘361015840470010158401015840N 114∘211015840053810158401015840E155731 30∘361015840471010158401015840N 114∘211015840053910158401015840E155737 30∘361015840472010158401015840N 114∘211015840055210158401015840E155743 30∘361015840471110158401015840N 114∘211015840055910158401015840E155749 30∘361015840470310158401015840N 114∘211015840055710158401015840E155755 30∘361015840469710158401015840N 114∘211015840054810158401015840E155801 30∘361015840469510158401015840N 114∘211015840055810158401015840E155807 30∘361015840470910158401015840N 114∘211015840056210158401015840E155813 30∘361015840472010158401015840N 114∘211015840053210158401015840E155819 30∘361015840472210158401015840N 114∘211015840051710158401015840E155825 30∘361015840470810158401015840N 114∘211015840050110158401015840E
42 Experiment Results andDiscussion Under different windspeeds and directions the experiments are carried out on theShuiyun lake of Wuhan University of Technology shown inFigure 12 to verify the performance of the SUICS Duringthe experimental period the related wind data that the sail-assisted USV experienced are recorded in Table 2 its trajec-tory coordinates are given in Table 3 and the correspondingtrajectories are depicted in Figure 12
As shown in Table 2 the wind speed was about 02msthe initial heading of the sail-assisted USV was 283∘ and therelative wind direction was 292∘ The average velocity of thesail-assisted USV was 03ms The USV was sailing beforethe wind at about 155720 by using the Sail 4A algorithmembedded in the SUICS the sail was adjusted automaticallyand then the velocity of the sail-assisted USV reached itsmaximum value When sliding until 155750 the USV wassailing against thewind owing to the limited thrust generatedby the sail its velocity decreased a little Following that thesail automatic control system of the SUICS adjusted the sailof attack at 155808 with the Sail 4A algorithm the velocityof the USV began to rise once again The entire process ofthe sailing angle adjustment lasted 3 s and the USV travelledalmost 1m
It can be seen from Figure 12 that our sail-assisted USVnavigates from the first point labeled as ldquo1rdquo to the secondpoint labeled as ldquo2rdquo and finally to the 20th point labeled asldquo20rdquo With lots of steering control straight line navigationand Zigzag routing the maneuverability of the sail-assistedUSV is validated through the above actions remarkablyConsequently the effectiveness of our SUICS is examined andverified successfully
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 11: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/11.jpg)
Mathematical Problems in Engineering 11
Figure 12 Navigation trajectory of the sail-assisted USV
151050 20 25 30 35 40Collection point
0
50
100
150
200
250
300
350Wind direction data during experiment
Win
d di
rect
ion
valu
e (∘ )
Dirwind
Figure 13 Wind direction Dirwind versus sampling point
The wind direction Dirwind versus sampling point thewind speed 119881119879 versus sampling point and the wave heightversus sampling point are presented in our manuscriptFigures 13 14 and 15 correspond to the above illustration insequence
During navigation wind direction Dirwind is collected bysensor system of the sail-assisted USV Figure 13 shows thatDirwind is varied with sampling point and falls in [0 360∘]where 0∘ and 360∘ are overlapped Figure 14 gives wind speed119881119879 versus sampling point It can be seen that 119881119879 ranges from0 to 08ms and with mean value 024 and variance value003 Consequently as depicted in Figure 14 sampled windspeed119881119879 is stableWave height119867wave versus sampling point isdemonstrated in Figure 15 Within our SUICS the precisionof wave height is 01m thus the numbers of119867wave in Figure 15are 0 and 01
The experiments demonstrate that the PC platform ishuman-machine interface friendly the sensor system is withhigh data collection efficiency the information can be trans-ferred simultaneously without error and the lower machineplatform can respond to the corresponding instructions
10 15 20 25 30 35 40Collection point
00 5
01
02
03
04
05
06
07
08
Win
d sp
eed
valu
e (m
s)
Wind speed data during experiment
VT
Figure 14 Wind speed 119881119879versus sampling point
fleetly Benefiting from our proposed Sail 4A algorithm thesail automatic control system adjusts the sail angle of attackautomatically with the aid of the sensor system the PCplatform the communication system and the drive systemof the SUICS Those experiments validate that our SUICS isreliable efficient and intelligent
5 Conclusions
The sail-assisted USV intelligent control system has beendesigned and implemented With our SUICS the windspeed and direction and the environment information ofthe USV are recorded in real time the information trans-ferred reliably and smoothly among the subsystems the PCplatform owns the friendly human-machine interface thelower machine platform can respond to the instructionstimely and effectively and then the optimal sail angle ofattack is achieved based on our proposed Sail 4A algorithmThe sustainable wind energy is exploited fully by using thedesigned SUICS Experiments under wind condition verifythe excellent performance of the SUICS In the near future
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 12: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/12.jpg)
12 Mathematical Problems in Engineering
10 15 20 25 30 35 40Collection point
00 5
001
002
003
004
005
006
007
008
009
01
Win
d he
ight
val
ue (m
)
Wave height data during experiment
Hwave
Figure 15 Wave height119867wave versus sampling point
we will apply our SUICS to the merchant ship to explore theocean sustainable wind energy then the energy consumptionof the shipping industry would lower down substantially tocater for the requirements issued by IMO
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Authorsrsquo Contributions
Yong Ma conceived and designed the SUICS frameworkYong Ma and Yujiao Zhao wrote the paper Yujiao ZhaoJiantao Diao Langxiong Gan Huaxiong Bi and JingmingZhao performed the experiments and analyzed the data
Acknowledgments
The authors are partially supported by the National ScienceFoundation of China (51309186 61304043 5147915651579202 71501151 and 61673223) China PostdoctoralScience Foundation Funded Project (2014M5606332015M571788 and 2015T80848) the Fund of Hubei InlandShipping Technology Key Laboratory (NHHY2014003)and the General Program of the Provincial Natural ScienceFoundation (2014CFB856)
References
[1] R Saidur N A Rahim M R Islam and K H Solangi ldquoEnvi-ronmental impact of wind energyrdquo Renewable and SustainableEnergy Reviews vol 15 no 5 pp 2423ndash2430 2011
[2] J Heng C Wang X Zhao and L Xiao ldquoResearch andapplication based on adaptive boosting strategy and modified
CGFPA algorithm a case study for wind speed forecastingrdquoSustainability vol 8 no 3 pp 235ndash259 2016
[3] F Y Zhang Y Q Dong and K Q Zhang ldquoA novel combinedmodel based on an artificial intelligence algorithmmdasha casestudy on wind speed forecasting in Penglai Chinardquo Sustain vol8 pp 555ndash574 2016
[4] J H He Y H Hu J J Tang and S Y Xue ldquoResearch onsail aerodynamics performance and sail-assisted ship stabilityrdquoJournal of Wind Engineering and Industrial Aerodynamics vol146 pp 81ndash89 2015
[5] Q Li Y Nihei T Nakashima and Y Ikeda ldquoA study on theperformance of cascade hard sails and sail-equipped vesselsrdquoOcean Engineering vol 98 pp 23ndash31 2015
[6] Y Ma H Wang L Gan M Guo L Huang and J ZhangldquoMobile robots path planning using the overall conflict resolu-tion and time baseline coordinationrdquoMathematical Problems inEngineering vol 2014 Article ID 902587 13 pages 2014
[7] Y Ma M Zamirian Y D Yang Y Xu and J Zhang ldquoPathplanning formobile objects in four-dimension based on particleswarmoptimizationmethodwith penalty functionrdquoMathemat-ical Problems in Engineering vol 2013 Article ID 613964 9pages 2013
[8] YMaHWang Y Xie andMGuo ldquoPath planning formultiplemobile robots under double-warehouserdquo Information Sciencesvol 278 pp 357ndash379 2014
[9] L A Danao J Edwards O Eboibi and R Howell ldquoA numericalinvestigation into the influence of unsteady wind on theperformance and aerodynamics of a vertical axis wind turbinerdquoApplied Energy vol 116 pp 111ndash124 2014
[10] S Roy and U K Saha ldquoWind tunnel experiments of a newlydeveloped two-bladed Savonius-style wind turbinerdquo AppliedEnergy vol 137 pp 117ndash125 2015
[11] V G Chapin N De Carlan and P Heppel ldquoPerformance opti-mization of interacting sails through fluid structure couplingrdquoin Proceedings of the 2nd International Conference on Innovationin High Performance Sailing Yachts pp 75ndash87 Lorient FranceJuly 2010
[12] H Renzsh and K Graf ldquoFluid-structure interaction simulationof spinnakers getting closer to realityrdquo in Proceedings of the2nd International Conference on Innovation inHigh PerformanceSailing Yachts Lorient France 2010
[13] F C Gerhardt R G J Flay and P Richards ldquoUnsteadyaerodynamics of two interacting yacht sails in two-dimensionalpotential flowrdquo Journal of FluidMechanics vol 668 pp 551ndash5812011
[14] R Leloup K Roncin G Bles J-B Leroux C Jochum and YParlier ldquoKite and classical rig sailing performance comparisonon a one design keel boatrdquo Ocean Engineering vol 90 pp 39ndash48 2014
[15] A Balasubramanian R Mahajan A Venkataramani B NLevine and J Zahorjan ldquoInteractive wifi connectivity formoving vehiclesrdquo ACM SIGCOMM Computer CommunicationReview vol 38 no 4 pp 427ndash438 2008
[16] O Sarbishei and K Radecka ldquoAnalysis of Mean-Square-Error(MSE) for fixed-point FFT unitsrdquo in Proceedings of the IEEEInternational Symposium of Circuits and Systems (ISCAS rsquo11) pp1732ndash1735 IEEE Rio de Janeiro Brazil May 2011
[17] A Valdessalici G Frassi and A Bellini ldquoEfficient implemen-tation of a spectrum analyzer for fixed point architecturesrdquo inProceedings of the IEEE International Conference on AcousticsSpeech and Signal Processing (ICASSP rsquo05) pp V109ndashV112March 2005
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 13: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/13.jpg)
Mathematical Problems in Engineering 13
[18] G Botella U Meyer-Baese A Garcıa and M RodrıguezldquoQuantization analysis and enhancement of a VLSI gradient-basedmotion estimation architecturerdquoDigital Signal Processingvol 22 no 6 pp 1174ndash1187 2012
[19] G Botella A Garcıa M Rodrıguez-Alvarez E Ros U Meyer-Baese and M C Molina ldquoRobust bioinspired architecture foroptical-flow computationrdquo IEEE Transactions on Very LargeScale Integration (VLSI) Systems vol 18 no 4 pp 616ndash629 2010
[20] A Shojaeifard F Zarringhalam and M Shikh-Bahaei ldquoJointphysical layer and data link layer optimization of CDMA-basednetworksrdquo IEEE Transactions on Wireless Communications vol10 no 10 pp 3278ndash3287 2011
[21] M Conti and S Giordano ldquoMobile ad hoc networking mile-stones challenges and new research directionsrdquo IEEE Commu-nications Magazine vol 52 no 1 pp 85ndash96 2014
[22] Y Q Zhu B Chen M Qin and Q A Huang ldquo2-D microma-chined thermal wind sensorsmdasha reviewrdquo IEEE Internet ofThingsJournal vol 1 pp 216ndash232 2014
[23] A A Quarta and G Mengali ldquoTrajectory approximationfor low-performance electric sail with constant thrust anglerdquoJournal of Guidance Control and Dynamics vol 36 no 3 pp884ndash887 2013
[24] H Zeng ldquoDiscuss AT89C51 single-chip microcomputer in theapplication of SR motor controlrdquo Electron-Test vol 5 pp 123ndash124 2013
[25] C B Hubschle G M Sheldrick and B Dittrich ldquoShelXle aQt graphical user interface for SHELXLrdquo Journal of AppliedCrystallography vol 44 no 6 pp 1281ndash1284 2011
[26] M Schoop F Kohne andKOstertag ldquoCommunication qualityin business negotiationsrdquo Group Decision and Negotiation vol19 no 2 pp 193ndash209 2010
[27] H Ortega-Arranz Y Torres A Gonzalez-Escribano and D RLlanos ldquoTuCCompi a multi-layer model for distributed het-erogeneous computing with tuning capabilitiesrdquo InternationalJournal of Parallel Programming vol 43 no 5 pp 939ndash9602015
[28] Y K Cai Z Q Liu Z Y Shi Q H Song and YWan ldquoInfluenceof machined surface roughness on thrust performance ofmicro-nozzle manufactured by micro-millingrdquo ExperimentalThermal and Fluid Science vol 77 pp 295ndash305 2016
[29] P Toivanen P Janhunen and J Envall ldquoElectric solar wind sailcontrol and navigationrdquo Advances in the Astronautical Sciencesvol 145 pp 275ndash285 2012
[30] T Araki and Y Kikuchi ldquoHamiltonian laceability of bubble-sortgraphswith edge faultsrdquo Information Sciences vol 177 no 13 pp2679ndash2691 2007
[31] J Harris and D Barber ldquoSpeech and gesture interfacesfor squad-level human-robot teamingrdquo in Proceedings of theUnmanned Systems Technology XVI vol 9084 of Proceedings ofSPIE International Society forOptics andPhotonics BaltimoreMd USA May 2014
[32] D Gonzalez G Botella U Meyer-Baese et al ldquoA low costmatching motion estimation sensor based on the NIOS IImicroprocessorrdquo Sensors vol 12 no 10 pp 13126ndash13149 2012
[33] D Gonzalez G Botella C Garcıa M Prieto and F TiradoldquoAcceleration of block-matching algorithms using a custominstruction-based paradigm on a Nios II microprocessorrdquoEURASIP Journal onAdvances in Signal Processing vol 2013 no1 article 118 pp 1ndash20 2013
[34] L Schulze and A Wullner ldquoThe approach of automatedguided vehicle systemsrdquo in Proceedings of the IEEE International
Conference on Service Operations and Logistics and Informatics(SOLI rsquo06) pp 522ndash527 IEEE June 2006
[35] S Mafrica A Servel and F Ruffier ldquoTowards an automaticparking system using bio-inspired 1-D optical flow sensorsrdquo inProceedings of the IEEE International Conference on VehicularElectronics and Safety (ICVES rsquo15) IEEE Yokohama JapanNovember 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Page 14: Research Article Design of Sail-Assisted Unmanned Surface ...downloads.hindawi.com/journals/mpe/2016/2958240.pdf · material,thesailcanbegroupedintotheso sailandhard sail [ ]. In](https://reader034.pdfslide.us/reader034/viewer/2022042214/5eb9e59d67c1fd517152b1f7/html5/thumbnails/14.jpg)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of