Embed Size (px)
Citation preview

Research ArticleCubic Trigonometric Nonuniform Spline Curves and Surfaces
Lanlan Yan12
1School of Mathematics and Statistics Central South University Changsha 410083 China2School of Science East China University of Technology Nanchang 330013 China
Correspondence should be addressed to Lanlan Yan yxh821011aliyuncom
Received 29 September 2015 Revised 9 January 2016 Accepted 11 January 2016
Academic Editor Ofer Hadar
Copyright copy 2016 Lanlan Yan This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A class of cubic trigonometric nonuniform spline basis functions with a local shape parameter is constructedTheir totally positiveproperty is proved The associated spline curves inherit most properties of usual polynomial 119861-spline curves and enjoy someother advantageous properties for engineering design They have 1198622 continuity at single knots For equidistant knots they have1198623 continuity and 1198625 continuity for particular choice of shape parameter They can express freeform curves as well as ellipses The
associated spline surfaces can exactly represent the surfaces of revolutionThus the curve and surface representation scheme unifiesthe representation of freeform shape and some analytical shapes which is popular in engineering
1 Introduction
As a unified mathematical model with many desirableproperties 119861-splines are widely applied to the modeling offreeform curves and surfaces However there are several lim-itations of the 119861-spline model which restrict its applicationsFor example once the knot vectors are specified the positionsof 119861-spline curves are relatively fixed to their control pointsOn the other hand 119861-spline curves fail to represent coniccurves except the parabolas as well as some transcendentalcurves such as the helix and the catenary which are often usedin engineering
Although the nonuniform rational 119861-spline (NURBS)can overcome the first shortcoming of 119861-splines to a certainextent it fails to model transcendental curves The NURBSmodel has several other potential limitations due to therelative complexity of rational basis functions For examplerational form may be unstable and derivatives and integralsare hard to compute Consequently in order to overcome thedrawbacks of119861-splines it is necessary to explore newmodels
To enhance the flexibility of 119861-spline models someresearchers have suggested many types of curves withshape parameters incorporated into the basis functions Forinstance Xu andWang [1] proposed three kinds of extensionsof cubic uniform 119861-spline The advantage of the extensions isthat they have shape parameters which can be used to adjustthe shape of the curves without shifting the control points
Costantini et al [2] presented a method for the constructionof cubic like 119861-splines with multiple knots The proposed119861-splines are equipped with tension parameters associatedto the knots which permit a modification of their shapeHan [3] constructed a kind of piecewise quartic polynomialcurves with a local shape parameter Han [4] defined a classof piecewise quartic spline curves with three local shapeparameters Hu et al [5] constructed a kind of119861-spline curveswith two local shape parameters To expand the scope ofshape representation of 119861-spline models some researchershave suggested many types of curves defined on nonpoly-nomial space For instance Han presented the quadratic[6] and cubic [7] trigonometric polynomial curves with ashape parameter Han and Zhu [8] defined trigonometric 119861-spline curves with three local shape parameters and a globalshape parameter Dube and Sharma [9] constructed thecubic trigonometric polynomial 119861-spline curves with a shapeparameter Wang et al [10] presented nonuniform algebraic-trigonometric 119861-splines The curves in [6ndash10] not only enjoyadjustable shape but also can exactly represent ellipses Yanand Liang [11] constructed a class of algebraic-trigonometricblending spline curves with two shape parameters Exceptfor shape adjustability the curves admit exact representationsfor several remarkable curves Lu et al [12] defined uniformalgebraic-hyperbolic blending119861-spline curves which possessadjustable shape and can represent exactly the hyperbola andthe catenary
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 7067408 9 pageshttpdxdoiorg10115520167067408
2 Mathematical Problems in Engineering
Totally positive property is one of the important proper-ties of basis functions Curves defined by totally positive basismust have variation diminishing and convexity preservingproperty Goodman and Said [13] proved that the generalizedBall basis given in [14] is normalized totally positive andhence it possesses the same kind of shape preserving prop-erties as the Bernstein basis [15] Han and Zhu [16] provedthat the cubic trigonometric Bezier basis given in [17] formsan optimal normalized totally positive basis Zhu et al [18]constructed four Bernstein-like basis functions which forman optimal normalized totally positive basis Based on theBernstein-like basis a class of totally positive 119861-spline-likebasis functions is constructedThe associated 119861-spline curveshave1198622 continuity at single knots and can be1198622 cap119865119862119896+3 (119896 isin
119885+) continuous for particular choice of shape parametersThe curves given in [1ndash10 12 18] have adjustable shape In
addition the curves given in [6ndash10 12] can represent exactlysome conic curves and transcendental curves Howeverwhether the blending functions in [1 3ndash10 12] have totalpositivity is unknown so whether the associated curves havevariation diminishing is unknownThe curves in [2 18] havevariation diminishing but they cannot represent conic curveor transcendental curve The purpose of this paper is todefine a kind of 119861-spline-like curves and surfaces whichhave adjustable shape and can represent some elementaryanalytic curves and surfaces and the curves have variationdiminishing thus having a good shape control
The research topics of this paper and some existing doc-uments such as [19 20] are similar There are also some dif-ferences though By extending the global parameter to localparameter Wu and Chen [19] presented cubic nonuniformtrigonometric polynomial curves withmultiple shape param-eters The curves are 119862
2 continuity for a nonuniform knotvector and 119862
3 continuity for a uniform knot vector respect-ivelyHan [20] presented quadratic trigonometric polynomialcurves with local basis The curves have 1198622 continuity witha nonuniform knot vector and any value of the bias Com-pared to [19 20] novelty of this paper is listed as followsFirst it discusses the total positivity of the basis functionsThis property makes the corresponding curves have varia-tion diminishing property which is one of the importantproperties of dominant Bezier curves and 119861-spline curvesSecond it provides the representation method of surfaceof revolution In surface modeling the construction of therotational surface is a common problem Third it provides aclass of higher order continuous curves which canmeetmostof the needs in engineering
The rest of the paper is organized as follows Section 2gives the definition and properties of the basis functionsSection 3 defines the associated curves and gives the rep-resentation of the ellipses and parabolas Section 4 definesthe associated surfaces and gives the representation of therotating surfaces Section 5 concludes the paper
2 Basis Functions
21 The Construction of the Basis Functions In [7] cubictrigonometric splines are presented for a nonuniform knot
vector These splines are used to define trigonometric splinecurves As special cases the author also introduces a class ofcubic trigonometric polynomial basis functions used to con-struct trigonometric Bezier curvesThe original expression ofthe basis functions is as follows
119861119894minus3
(119906) = (1 minus sin 119905)2 (1 minus 120582 sin 119905)
119861119894minus2
(119906) = sin 119905 (1 minus sin 119905)2 [2 + 120582 (1 minus sin 119905)]
119861119894minus1
(119906) = cos 119905 (1 minus cos 119905)2 [2 + 120582 (1 minus cos 119905)]
119861119894(119906) = (1 minus cos 119905)2 (1 minus 120582 cos 119905)
(1)
This set of basis functions contains only one shape parameterIn [17] it was further extended to possess two shape parame-ters
By changing the 120582 in the last two functions in (1) to 120583 aclass of cubic trigonometric Bezier basis functions with twoshape parameters is defined in [17] as follows Let 120582 120583 isin
[minus2 1] for 119905 isin [0 1205872] the following four functions aredefined to be the cubic trigonometric Bezier basis functions(119879-Bezier basis for short) with two shape parameters 120582 and120583
1198790(119905 120582) = (1 minus sin 119905)2 (1 minus 120582 sin 119905)
1198791(119905 120582) = sin 119905 (1 minus sin 119905) (2 + 120582 minus 120582 sin 119905)
1198792(119905 120583) = cos 119905 (1 minus cos 119905) (2 + 120583 minus 120583 cos 119905)
1198793(119905 120583) = (1 minus cos 119905)2 (1 minus 120583 cos 119905)
(2)
In [16] the 119879-Bezier basis was proved to be the opti-mal normalized totally positive basis of the space 119879
120582120583=
Span1 sin2119905 (1minussin 119905)2(1minus120582 sin 119905) (1minuscos 119905)2(1minus120583 cos 119905) for120582 120583 isin (minus2 1] Hence the corresponding cubic trigonometricBezier curves are suited for conformal curve designHoweverthe Bezier curve is a single curve segmentWhen using Beziercurve to describe complex shapes the problem of joiningcurve segments smoothly needs to be solvedThe Bezier formis the special case of 119861-spline 119861-spline curves consist ofmany polynomial pieces offering much more versatility thanBezier curves Considering the 119861-spline is more suitable forexpressing complex curve and surface this paper will discussmore generally the 119861-spline form
Next we will construct a kind of cubic trigonometricspline basis function based on the 119879-Bezier basis
Given knots 1199060lt 1199061lt sdot sdot sdot lt 119906
119899+4 we refer to 119880 =
(1199060 1199061 119906
119899+4) as a knot vector Let ℎ
119895= 119906119895+1
minus 119906119895 and
119905119895(119906) = (1205872)((119906 minus 119906
119895)ℎ119895) 119895 = 0 1 119899 + 3 we want to
construct the associated spline basis functions as follows
119861119894(119906) =
1198611198940(119905119894) 119906 isin [119906
119894 119906119894+1
)
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(3)
Mathematical Problems in Engineering 3
for 119894 = 0 1 119899 Here
1198611198940(119905) = 119889
1198941198793(119905 120582119894+1
)
1198611198941(119905) = 119888
119894+101198790(119905 120582119894+1
) + 119888119894+11
1198791(119905 120582119894+1
)
+ 119888119894+12
1198792(119905 120582119894+2
) + 119888119894+13
1198793(119905 120582119894+2
)
1198611198942(119905) = 119887
119894+201198790(119905 120582119894+2
) + 119887119894+21
1198791(119905 120582119894+2
)
+ 119887119894+22
1198792(119905 120582119894+3
) + 119887119894+23
1198793(119905 120582119894+3
)
1198611198943(119905) = 119886
119894+31198790(119905 120582119894+3
)
(4)
in which 119879119895(119905 120582) for 119895 = 0 1 2 3 are the 119879-Bezier basis
given in (2) and 119886119894+3
119887119894+2119895
119888119894+1119895
119889119894for 119895 = 0 1 2 3 are
undetermined coefficientsTo determine the coefficient values we impose two
conditions on 119861119894(119906) which have 1198622 continuity at each knot
and form a partition of unity on the interval [1199063 119906119899+1
] Thenwe can compute the coefficients as follows
119886119894=120573119894minus1
ℎ2
119894
120572119894120574119894
1198871198940
=120573119894(120574119894+1
120593119894minus1
ℎ119894+ 120574119894120601119894+1
ℎ119894minus1
)
120572119894120574119894120574119894+1
1198871198941
=120573119894120601119894+1
120574119894+1
1198871198942
=120573119894ℎ119894+1
120574119894+1
1198871198943
= 119886119894+1
119889119894=
120573119894+2
ℎ2
119894
120572119894+1
120574119894+2
1198881198943
=120573119894+1
(120574119894+2
120593119894ℎ119894+1
+ 120574119894+1
120601119894+2
ℎ119894)
120572119894+1
120574119894+1
120574119894+2
1198881198942
=120573119894+1
120593119894
120574119894+1
1198881198941
=120573119894+1
ℎ119894minus1
120574119894+1
1198881198940
= 119889119894minus1
(5)
where 120572119894= ℎ119894minus1
+ ℎ119894 120573119894= 1 + 2120582
119894 120593119894= ℎ119894minus1
+ 120573119894ℎ119894 and
120601119894= 120573119894ℎ119894minus1
+ ℎ119894 120574119894= 120573119894ℎ119894minus2
+ 120573119894minus1
120573119894ℎ119894minus1
+ 120573119894minus1
ℎ119894
For 119906 isin [119906119894 119906119894+1
) 119894 = 3 4 119899 we have 119861119895(119906) = 0 for
119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 and
119861119894minus3
(119906) = 119861119894minus33
(119905119894)
119861119894minus2
(119906) = 119861119894minus22
(119905119894)
119861119894minus1
(119906) = 119861119894minus11
(119905119894)
119861119894(119906) = 119861
1198940(119905119894)
(6)
We can easily check that
(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906))
= (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894 120582119894+1
) 1198793(119905119894 120582119894+1
))119867119894
(7)
where
119867119894= (
1198861198941198871198940
1198881198940
0
0 1198871198941
1198881198941
0
0 1198871198942
1198881198942
0
0 1198871198943
1198881198943
119889119894
) (8)
Theorem 1 When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119867119894is a
nonsingular stochastic and totally positive matrix
Proof When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] it is obvious that119886119894 119887119894119895 119888119894119895 119889119894are all positive for 119895 = 0 1 2 3 In addition from
(5) we can verify that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943+1198881198943+119889119894= 1This means that119867
119894is stochastic With direct
computation we have
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198941
1198881198941
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120593119894minus1
ℎ119894minus1
120572119894120574119894120574119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120593119894minus1
120593119894+ 120574119894120575119894ℎ119894minus1
)
1205721198941205741198941205742
119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198943
1198881198943
10038161003816100381610038161003816100381610038161003816100381610038161003816
=
120578119894(120574119894+1
120574119894+2
120593119894minus1
120593119894ℎ119894+1
+ 1205742
119894+1120593119894minus1
120601119894+2
ℎ119894+ 120574119894120574119894+1
120601119894+1
120601119894+2
ℎ119894minus1
+ 120574119894120574119894+2
120575119894ℎ119894minus1
ℎ119894+1
)
120572119894120572119894+1
1205741198941205742
119894+1120574119894+2
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120575119894
1205742
119894+1
gt 0
4 Mathematical Problems in Engineering
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120601119894+1
120601119894+2
+ 120574119894+2
120575119894ℎ119894+1
)
120572119894+1
1205742
119894+1120574119894+2
gt 0
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198942
1198881198942
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120601119894+2
ℎ119894+1
120572119894+1
120574119894+1
120574119894+2
gt 0
(9)
where 120578119894= 120573119894120573119894+1
ℎ119894 120575119894= ℎ119894minus1
+ ℎ119894+ ℎ119894+1
+ 2120582119894120572119894+1
+
2120582119894+1
120572119894+ 4120582119894120582119894+1
ℎ119894 From these we can easily deduce that119867
119894
is nonsingular and all its remaining minors are nonnegativeTherefore 119867
119894is a nonsingular stochastic and totally positive
matrix
Definition 2 Given a knot vector 119880 = (1199060 1199061 119906
119899+4) and
an array (1205821 1205822 120582
119899+3) ≜ 120582 where all 120582
119894isin (minus12 1]
119894 = 1 2 119899 + 3 by using the 119879-Bezier basis and thecoefficients given in (5) functions (3) are defined to be theassociated cubic trigonometric 119861-spline basis functions (119879-119861-spline basis for short)
It is easy to know the shape of 119861119894(119906) is related to
120582119894+1
120582119894+2
120582119894+3
We refer to the array 120582119894= (120582119894+1
120582119894+2
120582119894+3
)
as the shape parameter For equidistant knots we refer tothe 119861119894(119906) as a uniform 119879-119861-spline basis and refer to the knot
vector119880 as a uniform knot vector For nonequidistant knots119861119894(119906) and 119880 are called a nonuniform 119879-119861-spline basis and a
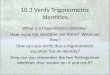
nonuniform knot vector respectivelyFigure 1 shows some graphs of uniform 119879-119861-spline basis
functions with different shape parameters As can be seenfrom the figure with the increase of the parameter 120582
119894+1 the
maximum of 119861119894(119906) decreases and the highest point of the
curve moves toward the right With the increase of 120582119894+2
the maximum of 119861
119894(119906) increases correspondingly With the
increase of 120582119894+2
the maximum of 119861119894(119906) decreases and the
highest point of the curvemoves toward the leftWhen 120582119894+1
=
120582119894+3
the graph of 119861119894(119906) is symmetry
22 The Property of the Basis Functions
Theorem 3 The 119879-119861-spline basis has the following properties
(a) Partition of unity sum119899119894=0
119861119894(119906) = 1 for 119906 isin [119906
3 119906119899+1
](b) Nonnegativity If 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] then119861119894(119906) gt 0 for 119906 isin (119906
119894 119906119894+4
)(c) Linear independence For 120582
119894minus1 120582119894 120582119894+1
isin (minus12 1]119894 = 3 4 119899 + 1 the set 119861
0(119906) 1198611(119906) 119861
119899(119906) is
linearly independent on [1199063 119906119899+1
](d) Normalized total positivity For 119906 isin [119906
119894 119906119894+1
] 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119894 = 3 4 119899 the system(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is a normalized totally
positive basis of the space 119879120582119894 120582119894+1
(e) Continuity With a nonuniform knot vector the 119879-
119861-spline basis 119861119894(119906) has 119862
2 continuity for 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] at each of the knots Witha uniform knot vector 119861
119894(119906) has 119862
3 continuity for
120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] and1198625 continuity for120582119894+1
=
120582119894+2
= 120582119894+3
= 1 at each of the knots
Proof (a) Notice that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943
+ 1198881198943
+ 119889119894= 1 For 119906 isin [119906
119894 119906119894+1
) 119894 = 3 4 119899 we have119861119895(119906) = 0 for 119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 then
119899
sum
119895=0
119861119895(119906) =
119894
sum
119895=119894minus3
119861119895(119906) =
3
sum
119895=0
119861119894minus119895119895
(119905119894) = 1 (10)
(b) When 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] we can see from (5)that 119886
119894+3 119887119894+2119895
119888119894+1119895
119889119894gt 0 (119895 = 0 1 2 3) Thus from the
positivity of the 119879-Bezier basis we can conclude that 119861119894(119906) gt
0 for 119906 isin (119906119894 119906119894+4
)(c) For any 120585
119895isin R (119895 = 0 1 119899) 119906 isin [119906
3 119906119899+1
] wedefine
119878 (119906) =
119899
sum
119895=0
120585119895119861119895(119906) = 0 (11)
For 120582119894minus1
120582119894 120582119894+1
isin (minus12 1] 119894 = 3 4 119899 + 1 direct com-putation gives that
119878 (119906119894) = 119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
1198781015840(119906119894) =
120587 (2 + 120582119894)
2ℎ119894
[119886119894(120585119894minus2
minus 120585119894minus3
)
+ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
11987810158401015840(119906119894) =
1205872(1 + 2120582
119894)
2ℎ2
119894
[119886119894(120585119894minus3
minus 120585119894minus2
)
+ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
(12)
Thus we can obtain the following linear systems of equationswith respect to 120585
119894minus3 120585119894minus2
120585119894minus1
119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
119886119894(120585119894minus2
minus 120585119894minus3
) +ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
119886119894(120585119894minus3
minus 120585119894minus2
) +ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
(13)
Mathematical Problems in Engineering 5
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
120582i= (minus04 0 1) 120582
i= (0 0 1) 120582
i= (05 0 1)
120582i= (0 0 0) 120582
i= (0 05 0) 120582
i= (0 1 0)
120582i= (1 0 minus04) 120582
i= (1 0 0) 120582
i= (1 0 05)
Figure 1 119879-119861-spline basis functions with different shape parameters
Since 119886119894+ 1198871198940
+ 1198881198940
= 1 we have the determinant of thecoefficient matrix 119863
119894given by the above linear systems of
equations as follows
1003816100381610038161003816119863119894
1003816100381610038161003816 =
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119894
1 1198881198940
minus1198861198940
ℎ119894
ℎ119894minus1
119889119894minus1
119886119894
0ℎ2
119894
ℎ2
119894minus1
119889119894minus1
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
=ℎ119894(ℎ119894minus1
+ ℎ119894)
ℎ2
119894minus1
119886119894119889119894minus1
gt 0 (14)
Therefore we can conclude that 120585119894minus3
= 120585119894minus2
= 120585119894minus1
= 0 for119894 = 3 4 119899 + 1
(d) Notice that the system (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894
120582119894+1
) 1198793(119905119894 120582119894+1
)) is the optimal normalized totally positivebasis of the space119879
120582119894 120582119894+1Thus by relation (7) andTheorem 1
we can see that the system (119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is
a totally positive basis(e) For any 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] direct computationwe have
119861(119896)
119894(119906+
119894) = 119861(119896)
119894(119906minus
119894+4) = 0 119896 = 0 1 2 3 5
119861119894(119906plusmn
119894+1) = 119889119894
119861119894(119906plusmn
119894+2) = 1 minus 119886
119894+2minus 119889119894+1
119861119894(119906plusmn
119894+3) = 119886119894+3
1198611015840
119894(119906plusmn
119894+1) =
120587119889119894(2 + 120582
119894+1)
2ℎ119894
1198611015840
119894(119906plusmn
119894+2) =
120587 (2 + 120582119894+2
)
2(119886119894+2
ℎ119894+2
minus119889119894+1
ℎ119894+1
)
1198611015840
119894(119906plusmn
119894+3) = minus
120587119886119894+3
(2 + 120582119894+3
)
2ℎ119894+3
11986110158401015840
119894(119906plusmn
119894+1) =
1205872119889119894(1 + 2120582
119894+1)
2ℎ2
119894
11986110158401015840
119894(119906plusmn
119894+2) = minus
1205872(1 + 2120582
119894+2)
2(119889119894+1
ℎ2
119894+1
+119886119894+2
ℎ2
119894+2
)
11986110158401015840
119894(119906plusmn
119894+3) =
1205872119886119894+3
(1 + 2120582119894+3
)
2ℎ2
119894+3
(15)
When ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ for any 120582119894+1
120582119894+2
120582119894+3
isin
(minus12 1] we have
119861101584010158401015840
119894(119906plusmn
119894+1) =
1205873119889119894(5120582119894+1
minus 2)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+2) =
1205873(5120582119894+2
minus 2) (119886119894+2
minus 119889119894+1
)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+3) =
1205873119886119894+3
(2 minus 5120582119894+3
)
8ℎ3
(16)
Further when ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ and 120582119894+1
= 120582119894+2
=
120582119894+3
= 1 we have
119861(4)
119894(119906+
119894) = 119861(4)
119894(119906minus
119894+4) = 0
119861(4)
119894(119906plusmn
119894+1) = minus
31205874119889119894
2ℎ4
6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
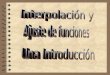
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
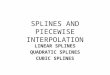
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Totally positive property is one of the important proper-ties of basis functions Curves defined by totally positive basismust have variation diminishing and convexity preservingproperty Goodman and Said [13] proved that the generalizedBall basis given in [14] is normalized totally positive andhence it possesses the same kind of shape preserving prop-erties as the Bernstein basis [15] Han and Zhu [16] provedthat the cubic trigonometric Bezier basis given in [17] formsan optimal normalized totally positive basis Zhu et al [18]constructed four Bernstein-like basis functions which forman optimal normalized totally positive basis Based on theBernstein-like basis a class of totally positive 119861-spline-likebasis functions is constructedThe associated 119861-spline curveshave1198622 continuity at single knots and can be1198622 cap119865119862119896+3 (119896 isin
119885+) continuous for particular choice of shape parametersThe curves given in [1ndash10 12 18] have adjustable shape In
addition the curves given in [6ndash10 12] can represent exactlysome conic curves and transcendental curves Howeverwhether the blending functions in [1 3ndash10 12] have totalpositivity is unknown so whether the associated curves havevariation diminishing is unknownThe curves in [2 18] havevariation diminishing but they cannot represent conic curveor transcendental curve The purpose of this paper is todefine a kind of 119861-spline-like curves and surfaces whichhave adjustable shape and can represent some elementaryanalytic curves and surfaces and the curves have variationdiminishing thus having a good shape control
The research topics of this paper and some existing doc-uments such as [19 20] are similar There are also some dif-ferences though By extending the global parameter to localparameter Wu and Chen [19] presented cubic nonuniformtrigonometric polynomial curves withmultiple shape param-eters The curves are 119862
2 continuity for a nonuniform knotvector and 119862
3 continuity for a uniform knot vector respect-ivelyHan [20] presented quadratic trigonometric polynomialcurves with local basis The curves have 1198622 continuity witha nonuniform knot vector and any value of the bias Com-pared to [19 20] novelty of this paper is listed as followsFirst it discusses the total positivity of the basis functionsThis property makes the corresponding curves have varia-tion diminishing property which is one of the importantproperties of dominant Bezier curves and 119861-spline curvesSecond it provides the representation method of surfaceof revolution In surface modeling the construction of therotational surface is a common problem Third it provides aclass of higher order continuous curves which canmeetmostof the needs in engineering
The rest of the paper is organized as follows Section 2gives the definition and properties of the basis functionsSection 3 defines the associated curves and gives the rep-resentation of the ellipses and parabolas Section 4 definesthe associated surfaces and gives the representation of therotating surfaces Section 5 concludes the paper
2 Basis Functions
21 The Construction of the Basis Functions In [7] cubictrigonometric splines are presented for a nonuniform knot
vector These splines are used to define trigonometric splinecurves As special cases the author also introduces a class ofcubic trigonometric polynomial basis functions used to con-struct trigonometric Bezier curvesThe original expression ofthe basis functions is as follows
119861119894minus3
(119906) = (1 minus sin 119905)2 (1 minus 120582 sin 119905)
119861119894minus2
(119906) = sin 119905 (1 minus sin 119905)2 [2 + 120582 (1 minus sin 119905)]
119861119894minus1
(119906) = cos 119905 (1 minus cos 119905)2 [2 + 120582 (1 minus cos 119905)]
119861119894(119906) = (1 minus cos 119905)2 (1 minus 120582 cos 119905)
(1)
This set of basis functions contains only one shape parameterIn [17] it was further extended to possess two shape parame-ters
By changing the 120582 in the last two functions in (1) to 120583 aclass of cubic trigonometric Bezier basis functions with twoshape parameters is defined in [17] as follows Let 120582 120583 isin
[minus2 1] for 119905 isin [0 1205872] the following four functions aredefined to be the cubic trigonometric Bezier basis functions(119879-Bezier basis for short) with two shape parameters 120582 and120583
1198790(119905 120582) = (1 minus sin 119905)2 (1 minus 120582 sin 119905)
1198791(119905 120582) = sin 119905 (1 minus sin 119905) (2 + 120582 minus 120582 sin 119905)
1198792(119905 120583) = cos 119905 (1 minus cos 119905) (2 + 120583 minus 120583 cos 119905)
1198793(119905 120583) = (1 minus cos 119905)2 (1 minus 120583 cos 119905)
(2)
In [16] the 119879-Bezier basis was proved to be the opti-mal normalized totally positive basis of the space 119879
120582120583=
Span1 sin2119905 (1minussin 119905)2(1minus120582 sin 119905) (1minuscos 119905)2(1minus120583 cos 119905) for120582 120583 isin (minus2 1] Hence the corresponding cubic trigonometricBezier curves are suited for conformal curve designHoweverthe Bezier curve is a single curve segmentWhen using Beziercurve to describe complex shapes the problem of joiningcurve segments smoothly needs to be solvedThe Bezier formis the special case of 119861-spline 119861-spline curves consist ofmany polynomial pieces offering much more versatility thanBezier curves Considering the 119861-spline is more suitable forexpressing complex curve and surface this paper will discussmore generally the 119861-spline form
Next we will construct a kind of cubic trigonometricspline basis function based on the 119879-Bezier basis
Given knots 1199060lt 1199061lt sdot sdot sdot lt 119906
119899+4 we refer to 119880 =
(1199060 1199061 119906
119899+4) as a knot vector Let ℎ
119895= 119906119895+1
minus 119906119895 and
119905119895(119906) = (1205872)((119906 minus 119906
119895)ℎ119895) 119895 = 0 1 119899 + 3 we want to
construct the associated spline basis functions as follows
119861119894(119906) =
1198611198940(119905119894) 119906 isin [119906
119894 119906119894+1
)
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(3)
Mathematical Problems in Engineering 3
for 119894 = 0 1 119899 Here
1198611198940(119905) = 119889
1198941198793(119905 120582119894+1
)
1198611198941(119905) = 119888
119894+101198790(119905 120582119894+1
) + 119888119894+11
1198791(119905 120582119894+1
)
+ 119888119894+12
1198792(119905 120582119894+2
) + 119888119894+13
1198793(119905 120582119894+2
)
1198611198942(119905) = 119887
119894+201198790(119905 120582119894+2
) + 119887119894+21
1198791(119905 120582119894+2
)
+ 119887119894+22
1198792(119905 120582119894+3
) + 119887119894+23
1198793(119905 120582119894+3
)
1198611198943(119905) = 119886
119894+31198790(119905 120582119894+3
)
(4)
in which 119879119895(119905 120582) for 119895 = 0 1 2 3 are the 119879-Bezier basis
given in (2) and 119886119894+3
119887119894+2119895
119888119894+1119895
119889119894for 119895 = 0 1 2 3 are
undetermined coefficientsTo determine the coefficient values we impose two
conditions on 119861119894(119906) which have 1198622 continuity at each knot
and form a partition of unity on the interval [1199063 119906119899+1
] Thenwe can compute the coefficients as follows
119886119894=120573119894minus1
ℎ2
119894
120572119894120574119894
1198871198940
=120573119894(120574119894+1
120593119894minus1
ℎ119894+ 120574119894120601119894+1
ℎ119894minus1
)
120572119894120574119894120574119894+1
1198871198941
=120573119894120601119894+1
120574119894+1
1198871198942
=120573119894ℎ119894+1
120574119894+1
1198871198943
= 119886119894+1
119889119894=
120573119894+2
ℎ2
119894
120572119894+1
120574119894+2
1198881198943
=120573119894+1
(120574119894+2
120593119894ℎ119894+1
+ 120574119894+1
120601119894+2
ℎ119894)
120572119894+1
120574119894+1
120574119894+2
1198881198942
=120573119894+1
120593119894
120574119894+1
1198881198941
=120573119894+1
ℎ119894minus1
120574119894+1
1198881198940
= 119889119894minus1
(5)
where 120572119894= ℎ119894minus1
+ ℎ119894 120573119894= 1 + 2120582
119894 120593119894= ℎ119894minus1
+ 120573119894ℎ119894 and
120601119894= 120573119894ℎ119894minus1
+ ℎ119894 120574119894= 120573119894ℎ119894minus2
+ 120573119894minus1
120573119894ℎ119894minus1
+ 120573119894minus1
ℎ119894
For 119906 isin [119906119894 119906119894+1
) 119894 = 3 4 119899 we have 119861119895(119906) = 0 for
119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 and
119861119894minus3
(119906) = 119861119894minus33
(119905119894)
119861119894minus2
(119906) = 119861119894minus22
(119905119894)
119861119894minus1
(119906) = 119861119894minus11
(119905119894)
119861119894(119906) = 119861
1198940(119905119894)
(6)
We can easily check that
(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906))
= (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894 120582119894+1
) 1198793(119905119894 120582119894+1
))119867119894
(7)
where
119867119894= (
1198861198941198871198940
1198881198940
0
0 1198871198941
1198881198941
0
0 1198871198942
1198881198942
0
0 1198871198943
1198881198943
119889119894
) (8)
Theorem 1 When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119867119894is a
nonsingular stochastic and totally positive matrix
Proof When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] it is obvious that119886119894 119887119894119895 119888119894119895 119889119894are all positive for 119895 = 0 1 2 3 In addition from
(5) we can verify that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943+1198881198943+119889119894= 1This means that119867
119894is stochastic With direct
computation we have
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198941
1198881198941
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120593119894minus1
ℎ119894minus1
120572119894120574119894120574119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120593119894minus1
120593119894+ 120574119894120575119894ℎ119894minus1
)
1205721198941205741198941205742
119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198943
1198881198943
10038161003816100381610038161003816100381610038161003816100381610038161003816
=
120578119894(120574119894+1
120574119894+2
120593119894minus1
120593119894ℎ119894+1
+ 1205742
119894+1120593119894minus1
120601119894+2
ℎ119894+ 120574119894120574119894+1
120601119894+1
120601119894+2
ℎ119894minus1
+ 120574119894120574119894+2
120575119894ℎ119894minus1
ℎ119894+1
)
120572119894120572119894+1
1205741198941205742
119894+1120574119894+2
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120575119894
1205742
119894+1
gt 0
4 Mathematical Problems in Engineering
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120601119894+1
120601119894+2
+ 120574119894+2
120575119894ℎ119894+1
)
120572119894+1
1205742
119894+1120574119894+2
gt 0
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198942
1198881198942
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120601119894+2
ℎ119894+1
120572119894+1
120574119894+1
120574119894+2
gt 0
(9)
where 120578119894= 120573119894120573119894+1
ℎ119894 120575119894= ℎ119894minus1
+ ℎ119894+ ℎ119894+1
+ 2120582119894120572119894+1
+
2120582119894+1
120572119894+ 4120582119894120582119894+1
ℎ119894 From these we can easily deduce that119867
119894
is nonsingular and all its remaining minors are nonnegativeTherefore 119867
119894is a nonsingular stochastic and totally positive
matrix
Definition 2 Given a knot vector 119880 = (1199060 1199061 119906
119899+4) and
an array (1205821 1205822 120582
119899+3) ≜ 120582 where all 120582
119894isin (minus12 1]
119894 = 1 2 119899 + 3 by using the 119879-Bezier basis and thecoefficients given in (5) functions (3) are defined to be theassociated cubic trigonometric 119861-spline basis functions (119879-119861-spline basis for short)
It is easy to know the shape of 119861119894(119906) is related to
120582119894+1
120582119894+2
120582119894+3
We refer to the array 120582119894= (120582119894+1
120582119894+2
120582119894+3
)
as the shape parameter For equidistant knots we refer tothe 119861119894(119906) as a uniform 119879-119861-spline basis and refer to the knot
vector119880 as a uniform knot vector For nonequidistant knots119861119894(119906) and 119880 are called a nonuniform 119879-119861-spline basis and a
nonuniform knot vector respectivelyFigure 1 shows some graphs of uniform 119879-119861-spline basis
functions with different shape parameters As can be seenfrom the figure with the increase of the parameter 120582
119894+1 the
maximum of 119861119894(119906) decreases and the highest point of the
curve moves toward the right With the increase of 120582119894+2
the maximum of 119861
119894(119906) increases correspondingly With the
increase of 120582119894+2
the maximum of 119861119894(119906) decreases and the
highest point of the curvemoves toward the leftWhen 120582119894+1
=
120582119894+3
the graph of 119861119894(119906) is symmetry
22 The Property of the Basis Functions
Theorem 3 The 119879-119861-spline basis has the following properties
(a) Partition of unity sum119899119894=0
119861119894(119906) = 1 for 119906 isin [119906
3 119906119899+1
](b) Nonnegativity If 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] then119861119894(119906) gt 0 for 119906 isin (119906
119894 119906119894+4
)(c) Linear independence For 120582
119894minus1 120582119894 120582119894+1
isin (minus12 1]119894 = 3 4 119899 + 1 the set 119861
0(119906) 1198611(119906) 119861
119899(119906) is
linearly independent on [1199063 119906119899+1
](d) Normalized total positivity For 119906 isin [119906
119894 119906119894+1
] 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119894 = 3 4 119899 the system(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is a normalized totally
positive basis of the space 119879120582119894 120582119894+1
(e) Continuity With a nonuniform knot vector the 119879-
119861-spline basis 119861119894(119906) has 119862
2 continuity for 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] at each of the knots Witha uniform knot vector 119861
119894(119906) has 119862
3 continuity for
120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] and1198625 continuity for120582119894+1
=
120582119894+2
= 120582119894+3
= 1 at each of the knots
Proof (a) Notice that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943
+ 1198881198943
+ 119889119894= 1 For 119906 isin [119906
119894 119906119894+1
) 119894 = 3 4 119899 we have119861119895(119906) = 0 for 119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 then
119899
sum
119895=0
119861119895(119906) =
119894
sum
119895=119894minus3
119861119895(119906) =
3
sum
119895=0
119861119894minus119895119895
(119905119894) = 1 (10)
(b) When 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] we can see from (5)that 119886
119894+3 119887119894+2119895
119888119894+1119895
119889119894gt 0 (119895 = 0 1 2 3) Thus from the
positivity of the 119879-Bezier basis we can conclude that 119861119894(119906) gt
0 for 119906 isin (119906119894 119906119894+4
)(c) For any 120585
119895isin R (119895 = 0 1 119899) 119906 isin [119906
3 119906119899+1
] wedefine
119878 (119906) =
119899
sum
119895=0
120585119895119861119895(119906) = 0 (11)
For 120582119894minus1
120582119894 120582119894+1
isin (minus12 1] 119894 = 3 4 119899 + 1 direct com-putation gives that
119878 (119906119894) = 119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
1198781015840(119906119894) =
120587 (2 + 120582119894)
2ℎ119894
[119886119894(120585119894minus2
minus 120585119894minus3
)
+ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
11987810158401015840(119906119894) =
1205872(1 + 2120582
119894)
2ℎ2
119894
[119886119894(120585119894minus3
minus 120585119894minus2
)
+ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
(12)
Thus we can obtain the following linear systems of equationswith respect to 120585
119894minus3 120585119894minus2
120585119894minus1
119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
119886119894(120585119894minus2
minus 120585119894minus3
) +ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
119886119894(120585119894minus3
minus 120585119894minus2
) +ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
(13)
Mathematical Problems in Engineering 5
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
120582i= (minus04 0 1) 120582
i= (0 0 1) 120582
i= (05 0 1)
120582i= (0 0 0) 120582
i= (0 05 0) 120582
i= (0 1 0)
120582i= (1 0 minus04) 120582
i= (1 0 0) 120582
i= (1 0 05)
Figure 1 119879-119861-spline basis functions with different shape parameters
Since 119886119894+ 1198871198940
+ 1198881198940
= 1 we have the determinant of thecoefficient matrix 119863
119894given by the above linear systems of
equations as follows
1003816100381610038161003816119863119894
1003816100381610038161003816 =
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119894
1 1198881198940
minus1198861198940
ℎ119894
ℎ119894minus1
119889119894minus1
119886119894
0ℎ2
119894
ℎ2
119894minus1
119889119894minus1
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
=ℎ119894(ℎ119894minus1
+ ℎ119894)
ℎ2
119894minus1
119886119894119889119894minus1
gt 0 (14)
Therefore we can conclude that 120585119894minus3
= 120585119894minus2
= 120585119894minus1
= 0 for119894 = 3 4 119899 + 1
(d) Notice that the system (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894
120582119894+1
) 1198793(119905119894 120582119894+1
)) is the optimal normalized totally positivebasis of the space119879
120582119894 120582119894+1Thus by relation (7) andTheorem 1
we can see that the system (119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is
a totally positive basis(e) For any 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] direct computationwe have
119861(119896)
119894(119906+
119894) = 119861(119896)
119894(119906minus
119894+4) = 0 119896 = 0 1 2 3 5
119861119894(119906plusmn
119894+1) = 119889119894
119861119894(119906plusmn
119894+2) = 1 minus 119886
119894+2minus 119889119894+1
119861119894(119906plusmn
119894+3) = 119886119894+3
1198611015840
119894(119906plusmn
119894+1) =
120587119889119894(2 + 120582
119894+1)
2ℎ119894
1198611015840
119894(119906plusmn
119894+2) =
120587 (2 + 120582119894+2
)
2(119886119894+2
ℎ119894+2
minus119889119894+1
ℎ119894+1
)
1198611015840
119894(119906plusmn
119894+3) = minus
120587119886119894+3
(2 + 120582119894+3
)
2ℎ119894+3
11986110158401015840
119894(119906plusmn
119894+1) =
1205872119889119894(1 + 2120582
119894+1)
2ℎ2
119894
11986110158401015840
119894(119906plusmn
119894+2) = minus
1205872(1 + 2120582
119894+2)
2(119889119894+1
ℎ2
119894+1
+119886119894+2
ℎ2
119894+2
)
11986110158401015840
119894(119906plusmn
119894+3) =
1205872119886119894+3
(1 + 2120582119894+3
)
2ℎ2
119894+3
(15)
When ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ for any 120582119894+1
120582119894+2
120582119894+3
isin
(minus12 1] we have
119861101584010158401015840
119894(119906plusmn
119894+1) =
1205873119889119894(5120582119894+1
minus 2)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+2) =
1205873(5120582119894+2
minus 2) (119886119894+2
minus 119889119894+1
)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+3) =
1205873119886119894+3
(2 minus 5120582119894+3
)
8ℎ3
(16)
Further when ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ and 120582119894+1
= 120582119894+2
=
120582119894+3
= 1 we have
119861(4)
119894(119906+
119894) = 119861(4)
119894(119906minus
119894+4) = 0
119861(4)
119894(119906plusmn
119894+1) = minus
31205874119889119894
2ℎ4
6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
for 119894 = 0 1 119899 Here
1198611198940(119905) = 119889
1198941198793(119905 120582119894+1
)
1198611198941(119905) = 119888
119894+101198790(119905 120582119894+1
) + 119888119894+11
1198791(119905 120582119894+1
)
+ 119888119894+12
1198792(119905 120582119894+2
) + 119888119894+13
1198793(119905 120582119894+2
)
1198611198942(119905) = 119887
119894+201198790(119905 120582119894+2
) + 119887119894+21
1198791(119905 120582119894+2
)
+ 119887119894+22
1198792(119905 120582119894+3
) + 119887119894+23
1198793(119905 120582119894+3
)
1198611198943(119905) = 119886
119894+31198790(119905 120582119894+3
)
(4)
in which 119879119895(119905 120582) for 119895 = 0 1 2 3 are the 119879-Bezier basis
given in (2) and 119886119894+3
119887119894+2119895
119888119894+1119895
119889119894for 119895 = 0 1 2 3 are
undetermined coefficientsTo determine the coefficient values we impose two
conditions on 119861119894(119906) which have 1198622 continuity at each knot
and form a partition of unity on the interval [1199063 119906119899+1
] Thenwe can compute the coefficients as follows
119886119894=120573119894minus1
ℎ2
119894
120572119894120574119894
1198871198940
=120573119894(120574119894+1
120593119894minus1
ℎ119894+ 120574119894120601119894+1
ℎ119894minus1
)
120572119894120574119894120574119894+1
1198871198941
=120573119894120601119894+1
120574119894+1
1198871198942
=120573119894ℎ119894+1
120574119894+1
1198871198943
= 119886119894+1
119889119894=
120573119894+2
ℎ2
119894
120572119894+1
120574119894+2
1198881198943
=120573119894+1
(120574119894+2
120593119894ℎ119894+1
+ 120574119894+1
120601119894+2
ℎ119894)
120572119894+1
120574119894+1
120574119894+2
1198881198942
=120573119894+1
120593119894
120574119894+1
1198881198941
=120573119894+1
ℎ119894minus1
120574119894+1
1198881198940
= 119889119894minus1
(5)
where 120572119894= ℎ119894minus1
+ ℎ119894 120573119894= 1 + 2120582
119894 120593119894= ℎ119894minus1
+ 120573119894ℎ119894 and
120601119894= 120573119894ℎ119894minus1
+ ℎ119894 120574119894= 120573119894ℎ119894minus2
+ 120573119894minus1
120573119894ℎ119894minus1
+ 120573119894minus1
ℎ119894
For 119906 isin [119906119894 119906119894+1
) 119894 = 3 4 119899 we have 119861119895(119906) = 0 for
119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 and
119861119894minus3
(119906) = 119861119894minus33
(119905119894)
119861119894minus2
(119906) = 119861119894minus22
(119905119894)
119861119894minus1
(119906) = 119861119894minus11
(119905119894)
119861119894(119906) = 119861
1198940(119905119894)
(6)
We can easily check that
(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906))
= (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894 120582119894+1
) 1198793(119905119894 120582119894+1
))119867119894
(7)
where
119867119894= (
1198861198941198871198940
1198881198940
0
0 1198871198941
1198881198941
0
0 1198871198942
1198881198942
0
0 1198871198943
1198881198943
119889119894
) (8)
Theorem 1 When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119867119894is a
nonsingular stochastic and totally positive matrix
Proof When 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] it is obvious that119886119894 119887119894119895 119888119894119895 119889119894are all positive for 119895 = 0 1 2 3 In addition from
(5) we can verify that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943+1198881198943+119889119894= 1This means that119867
119894is stochastic With direct
computation we have
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198941
1198881198941
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120593119894minus1
ℎ119894minus1
120572119894120574119894120574119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120593119894minus1
120593119894+ 120574119894120575119894ℎ119894minus1
)
1205721198941205741198941205742
119894+1
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198940
1198881198940
1198871198943
1198881198943
10038161003816100381610038161003816100381610038161003816100381610038161003816
=
120578119894(120574119894+1
120574119894+2
120593119894minus1
120593119894ℎ119894+1
+ 1205742
119894+1120593119894minus1
120601119894+2
ℎ119894+ 120574119894120574119894+1
120601119894+1
120601119894+2
ℎ119894minus1
+ 120574119894120574119894+2
120575119894ℎ119894minus1
ℎ119894+1
)
120572119894120572119894+1
1205741198941205742
119894+1120574119894+2
gt 0
10038161003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198942
1198881198942
10038161003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120575119894
1205742
119894+1
gt 0
4 Mathematical Problems in Engineering
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120601119894+1
120601119894+2
+ 120574119894+2
120575119894ℎ119894+1
)
120572119894+1
1205742
119894+1120574119894+2
gt 0
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198942
1198881198942
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120601119894+2
ℎ119894+1
120572119894+1
120574119894+1
120574119894+2
gt 0
(9)
where 120578119894= 120573119894120573119894+1
ℎ119894 120575119894= ℎ119894minus1
+ ℎ119894+ ℎ119894+1
+ 2120582119894120572119894+1
+
2120582119894+1
120572119894+ 4120582119894120582119894+1
ℎ119894 From these we can easily deduce that119867
119894
is nonsingular and all its remaining minors are nonnegativeTherefore 119867
119894is a nonsingular stochastic and totally positive
matrix
Definition 2 Given a knot vector 119880 = (1199060 1199061 119906
119899+4) and
an array (1205821 1205822 120582
119899+3) ≜ 120582 where all 120582
119894isin (minus12 1]
119894 = 1 2 119899 + 3 by using the 119879-Bezier basis and thecoefficients given in (5) functions (3) are defined to be theassociated cubic trigonometric 119861-spline basis functions (119879-119861-spline basis for short)
It is easy to know the shape of 119861119894(119906) is related to
120582119894+1
120582119894+2
120582119894+3
We refer to the array 120582119894= (120582119894+1
120582119894+2
120582119894+3
)
as the shape parameter For equidistant knots we refer tothe 119861119894(119906) as a uniform 119879-119861-spline basis and refer to the knot
vector119880 as a uniform knot vector For nonequidistant knots119861119894(119906) and 119880 are called a nonuniform 119879-119861-spline basis and a
nonuniform knot vector respectivelyFigure 1 shows some graphs of uniform 119879-119861-spline basis
functions with different shape parameters As can be seenfrom the figure with the increase of the parameter 120582
119894+1 the
maximum of 119861119894(119906) decreases and the highest point of the
curve moves toward the right With the increase of 120582119894+2
the maximum of 119861
119894(119906) increases correspondingly With the
increase of 120582119894+2
the maximum of 119861119894(119906) decreases and the
highest point of the curvemoves toward the leftWhen 120582119894+1
=
120582119894+3
the graph of 119861119894(119906) is symmetry
22 The Property of the Basis Functions
Theorem 3 The 119879-119861-spline basis has the following properties
(a) Partition of unity sum119899119894=0
119861119894(119906) = 1 for 119906 isin [119906
3 119906119899+1
](b) Nonnegativity If 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] then119861119894(119906) gt 0 for 119906 isin (119906
119894 119906119894+4
)(c) Linear independence For 120582
119894minus1 120582119894 120582119894+1
isin (minus12 1]119894 = 3 4 119899 + 1 the set 119861
0(119906) 1198611(119906) 119861
119899(119906) is
linearly independent on [1199063 119906119899+1
](d) Normalized total positivity For 119906 isin [119906
119894 119906119894+1
] 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119894 = 3 4 119899 the system(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is a normalized totally
positive basis of the space 119879120582119894 120582119894+1
(e) Continuity With a nonuniform knot vector the 119879-
119861-spline basis 119861119894(119906) has 119862
2 continuity for 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] at each of the knots Witha uniform knot vector 119861
119894(119906) has 119862
3 continuity for
120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] and1198625 continuity for120582119894+1
=
120582119894+2
= 120582119894+3
= 1 at each of the knots
Proof (a) Notice that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943
+ 1198881198943
+ 119889119894= 1 For 119906 isin [119906
119894 119906119894+1
) 119894 = 3 4 119899 we have119861119895(119906) = 0 for 119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 then
119899
sum
119895=0
119861119895(119906) =
119894
sum
119895=119894minus3
119861119895(119906) =
3
sum
119895=0
119861119894minus119895119895
(119905119894) = 1 (10)
(b) When 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] we can see from (5)that 119886
119894+3 119887119894+2119895
119888119894+1119895
119889119894gt 0 (119895 = 0 1 2 3) Thus from the
positivity of the 119879-Bezier basis we can conclude that 119861119894(119906) gt
0 for 119906 isin (119906119894 119906119894+4
)(c) For any 120585
119895isin R (119895 = 0 1 119899) 119906 isin [119906
3 119906119899+1
] wedefine
119878 (119906) =
119899
sum
119895=0
120585119895119861119895(119906) = 0 (11)
For 120582119894minus1
120582119894 120582119894+1
isin (minus12 1] 119894 = 3 4 119899 + 1 direct com-putation gives that
119878 (119906119894) = 119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
1198781015840(119906119894) =
120587 (2 + 120582119894)
2ℎ119894
[119886119894(120585119894minus2
minus 120585119894minus3
)
+ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
11987810158401015840(119906119894) =
1205872(1 + 2120582
119894)
2ℎ2
119894
[119886119894(120585119894minus3
minus 120585119894minus2
)
+ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
(12)
Thus we can obtain the following linear systems of equationswith respect to 120585
119894minus3 120585119894minus2
120585119894minus1
119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
119886119894(120585119894minus2
minus 120585119894minus3
) +ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
119886119894(120585119894minus3
minus 120585119894minus2
) +ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
(13)
Mathematical Problems in Engineering 5
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
120582i= (minus04 0 1) 120582
i= (0 0 1) 120582
i= (05 0 1)
120582i= (0 0 0) 120582
i= (0 05 0) 120582
i= (0 1 0)
120582i= (1 0 minus04) 120582
i= (1 0 0) 120582
i= (1 0 05)
Figure 1 119879-119861-spline basis functions with different shape parameters
Since 119886119894+ 1198871198940
+ 1198881198940
= 1 we have the determinant of thecoefficient matrix 119863
119894given by the above linear systems of
equations as follows
1003816100381610038161003816119863119894
1003816100381610038161003816 =
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119894
1 1198881198940
minus1198861198940
ℎ119894
ℎ119894minus1
119889119894minus1
119886119894
0ℎ2
119894
ℎ2
119894minus1
119889119894minus1
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
=ℎ119894(ℎ119894minus1
+ ℎ119894)
ℎ2
119894minus1
119886119894119889119894minus1
gt 0 (14)
Therefore we can conclude that 120585119894minus3
= 120585119894minus2
= 120585119894minus1
= 0 for119894 = 3 4 119899 + 1
(d) Notice that the system (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894
120582119894+1
) 1198793(119905119894 120582119894+1
)) is the optimal normalized totally positivebasis of the space119879
120582119894 120582119894+1Thus by relation (7) andTheorem 1
we can see that the system (119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is
a totally positive basis(e) For any 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] direct computationwe have
119861(119896)
119894(119906+
119894) = 119861(119896)
119894(119906minus
119894+4) = 0 119896 = 0 1 2 3 5
119861119894(119906plusmn
119894+1) = 119889119894
119861119894(119906plusmn
119894+2) = 1 minus 119886
119894+2minus 119889119894+1
119861119894(119906plusmn
119894+3) = 119886119894+3
1198611015840
119894(119906plusmn
119894+1) =
120587119889119894(2 + 120582
119894+1)
2ℎ119894
1198611015840
119894(119906plusmn
119894+2) =
120587 (2 + 120582119894+2
)
2(119886119894+2
ℎ119894+2
minus119889119894+1
ℎ119894+1
)
1198611015840
119894(119906plusmn
119894+3) = minus
120587119886119894+3
(2 + 120582119894+3
)
2ℎ119894+3
11986110158401015840
119894(119906plusmn
119894+1) =
1205872119889119894(1 + 2120582
119894+1)
2ℎ2
119894
11986110158401015840
119894(119906plusmn
119894+2) = minus
1205872(1 + 2120582
119894+2)
2(119889119894+1
ℎ2
119894+1
+119886119894+2
ℎ2
119894+2
)
11986110158401015840
119894(119906plusmn
119894+3) =
1205872119886119894+3
(1 + 2120582119894+3
)
2ℎ2
119894+3
(15)
When ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ for any 120582119894+1
120582119894+2
120582119894+3
isin
(minus12 1] we have
119861101584010158401015840
119894(119906plusmn
119894+1) =
1205873119889119894(5120582119894+1
minus 2)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+2) =
1205873(5120582119894+2
minus 2) (119886119894+2
minus 119889119894+1
)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+3) =
1205873119886119894+3
(2 minus 5120582119894+3
)
8ℎ3
(16)
Further when ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ and 120582119894+1
= 120582119894+2
=
120582119894+3
= 1 we have
119861(4)
119894(119906+
119894) = 119861(4)
119894(119906minus
119894+4) = 0
119861(4)
119894(119906plusmn
119894+1) = minus
31205874119889119894
2ℎ4
6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198941
1198881198941
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894(120574119894+1
120601119894+1
120601119894+2
+ 120574119894+2
120575119894ℎ119894+1
)
120572119894+1
1205742
119894+1120574119894+2
gt 0
1003816100381610038161003816100381610038161003816100381610038161003816
1198871198942
1198881198942
1198871198943
1198881198943
1003816100381610038161003816100381610038161003816100381610038161003816
=120578119894120601119894+2
ℎ119894+1
120572119894+1
120574119894+1
120574119894+2
gt 0
(9)
where 120578119894= 120573119894120573119894+1
ℎ119894 120575119894= ℎ119894minus1
+ ℎ119894+ ℎ119894+1
+ 2120582119894120572119894+1
+
2120582119894+1
120572119894+ 4120582119894120582119894+1
ℎ119894 From these we can easily deduce that119867
119894
is nonsingular and all its remaining minors are nonnegativeTherefore 119867
119894is a nonsingular stochastic and totally positive
matrix
Definition 2 Given a knot vector 119880 = (1199060 1199061 119906
119899+4) and
an array (1205821 1205822 120582
119899+3) ≜ 120582 where all 120582
119894isin (minus12 1]
119894 = 1 2 119899 + 3 by using the 119879-Bezier basis and thecoefficients given in (5) functions (3) are defined to be theassociated cubic trigonometric 119861-spline basis functions (119879-119861-spline basis for short)
It is easy to know the shape of 119861119894(119906) is related to
120582119894+1
120582119894+2
120582119894+3
We refer to the array 120582119894= (120582119894+1
120582119894+2
120582119894+3
)
as the shape parameter For equidistant knots we refer tothe 119861119894(119906) as a uniform 119879-119861-spline basis and refer to the knot
vector119880 as a uniform knot vector For nonequidistant knots119861119894(119906) and 119880 are called a nonuniform 119879-119861-spline basis and a
nonuniform knot vector respectivelyFigure 1 shows some graphs of uniform 119879-119861-spline basis
functions with different shape parameters As can be seenfrom the figure with the increase of the parameter 120582
119894+1 the
maximum of 119861119894(119906) decreases and the highest point of the
curve moves toward the right With the increase of 120582119894+2
the maximum of 119861
119894(119906) increases correspondingly With the
increase of 120582119894+2
the maximum of 119861119894(119906) decreases and the
highest point of the curvemoves toward the leftWhen 120582119894+1
=
120582119894+3
the graph of 119861119894(119906) is symmetry
22 The Property of the Basis Functions
Theorem 3 The 119879-119861-spline basis has the following properties
(a) Partition of unity sum119899119894=0
119861119894(119906) = 1 for 119906 isin [119906
3 119906119899+1
](b) Nonnegativity If 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] then119861119894(119906) gt 0 for 119906 isin (119906
119894 119906119894+4
)(c) Linear independence For 120582
119894minus1 120582119894 120582119894+1
isin (minus12 1]119894 = 3 4 119899 + 1 the set 119861
0(119906) 1198611(119906) 119861
119899(119906) is
linearly independent on [1199063 119906119899+1
](d) Normalized total positivity For 119906 isin [119906
119894 119906119894+1
] 120582119894minus1
120582119894 120582119894+1
120582119894+2
isin (minus12 1] 119894 = 3 4 119899 the system(119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is a normalized totally
positive basis of the space 119879120582119894 120582119894+1
(e) Continuity With a nonuniform knot vector the 119879-
119861-spline basis 119861119894(119906) has 119862
2 continuity for 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] at each of the knots Witha uniform knot vector 119861
119894(119906) has 119862
3 continuity for
120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] and1198625 continuity for120582119894+1
=
120582119894+2
= 120582119894+3
= 1 at each of the knots
Proof (a) Notice that 119886119894+ 1198871198940+ 1198881198940
= 1198871198941+ 1198881198941
= 1198871198942+ 1198881198942
=
1198871198943
+ 1198881198943
+ 119889119894= 1 For 119906 isin [119906
119894 119906119894+1
) 119894 = 3 4 119899 we have119861119895(119906) = 0 for 119895 = 119894 minus 3 119894 minus 2 119894 minus 1 119894 then
119899
sum
119895=0
119861119895(119906) =
119894
sum
119895=119894minus3
119861119895(119906) =
3
sum
119895=0
119861119894minus119895119895
(119905119894) = 1 (10)
(b) When 120582119894+1
120582119894+2
120582119894+3
isin (minus12 1] we can see from (5)that 119886
119894+3 119887119894+2119895
119888119894+1119895
119889119894gt 0 (119895 = 0 1 2 3) Thus from the
positivity of the 119879-Bezier basis we can conclude that 119861119894(119906) gt
0 for 119906 isin (119906119894 119906119894+4
)(c) For any 120585
119895isin R (119895 = 0 1 119899) 119906 isin [119906
3 119906119899+1
] wedefine
119878 (119906) =
119899
sum
119895=0
120585119895119861119895(119906) = 0 (11)
For 120582119894minus1
120582119894 120582119894+1
isin (minus12 1] 119894 = 3 4 119899 + 1 direct com-putation gives that
119878 (119906119894) = 119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
1198781015840(119906119894) =
120587 (2 + 120582119894)
2ℎ119894
[119886119894(120585119894minus2
minus 120585119894minus3
)
+ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
11987810158401015840(119906119894) =
1205872(1 + 2120582
119894)
2ℎ2
119894
[119886119894(120585119894minus3
minus 120585119894minus2
)
+ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
)] = 0
(12)
Thus we can obtain the following linear systems of equationswith respect to 120585
119894minus3 120585119894minus2
120585119894minus1
119886119894120585119894minus3
+ 1198871198940120585119894minus2
+ 1198881198940120585119894minus1
= 0
119886119894(120585119894minus2
minus 120585119894minus3
) +ℎ119894
ℎ119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
119886119894(120585119894minus3
minus 120585119894minus2
) +ℎ2
119894
ℎ2
119894minus1
119889119894minus1
(120585119894minus1
minus 120585119894minus2
) = 0
(13)
Mathematical Problems in Engineering 5
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
120582i= (minus04 0 1) 120582
i= (0 0 1) 120582
i= (05 0 1)
120582i= (0 0 0) 120582
i= (0 05 0) 120582
i= (0 1 0)
120582i= (1 0 minus04) 120582
i= (1 0 0) 120582
i= (1 0 05)
Figure 1 119879-119861-spline basis functions with different shape parameters
Since 119886119894+ 1198871198940
+ 1198881198940
= 1 we have the determinant of thecoefficient matrix 119863
119894given by the above linear systems of
equations as follows
1003816100381610038161003816119863119894
1003816100381610038161003816 =
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119894
1 1198881198940
minus1198861198940
ℎ119894
ℎ119894minus1
119889119894minus1
119886119894
0ℎ2
119894
ℎ2
119894minus1
119889119894minus1
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
=ℎ119894(ℎ119894minus1
+ ℎ119894)
ℎ2
119894minus1
119886119894119889119894minus1
gt 0 (14)
Therefore we can conclude that 120585119894minus3
= 120585119894minus2
= 120585119894minus1
= 0 for119894 = 3 4 119899 + 1
(d) Notice that the system (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894
120582119894+1
) 1198793(119905119894 120582119894+1
)) is the optimal normalized totally positivebasis of the space119879
120582119894 120582119894+1Thus by relation (7) andTheorem 1
we can see that the system (119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is
a totally positive basis(e) For any 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] direct computationwe have
119861(119896)
119894(119906+
119894) = 119861(119896)
119894(119906minus
119894+4) = 0 119896 = 0 1 2 3 5
119861119894(119906plusmn
119894+1) = 119889119894
119861119894(119906plusmn
119894+2) = 1 minus 119886
119894+2minus 119889119894+1
119861119894(119906plusmn
119894+3) = 119886119894+3
1198611015840
119894(119906plusmn
119894+1) =
120587119889119894(2 + 120582
119894+1)
2ℎ119894
1198611015840
119894(119906plusmn
119894+2) =
120587 (2 + 120582119894+2
)
2(119886119894+2
ℎ119894+2
minus119889119894+1
ℎ119894+1
)
1198611015840
119894(119906plusmn
119894+3) = minus
120587119886119894+3
(2 + 120582119894+3
)
2ℎ119894+3
11986110158401015840
119894(119906plusmn
119894+1) =
1205872119889119894(1 + 2120582
119894+1)
2ℎ2
119894
11986110158401015840
119894(119906plusmn
119894+2) = minus
1205872(1 + 2120582
119894+2)
2(119889119894+1
ℎ2
119894+1
+119886119894+2
ℎ2
119894+2
)
11986110158401015840
119894(119906plusmn
119894+3) =
1205872119886119894+3
(1 + 2120582119894+3
)
2ℎ2
119894+3
(15)
When ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ for any 120582119894+1
120582119894+2
120582119894+3
isin
(minus12 1] we have
119861101584010158401015840
119894(119906plusmn
119894+1) =
1205873119889119894(5120582119894+1
minus 2)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+2) =
1205873(5120582119894+2
minus 2) (119886119894+2
minus 119889119894+1
)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+3) =
1205873119886119894+3
(2 minus 5120582119894+3
)
8ℎ3
(16)
Further when ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ and 120582119894+1
= 120582119894+2
=
120582119894+3
= 1 we have
119861(4)
119894(119906+
119894) = 119861(4)
119894(119906minus
119894+4) = 0
119861(4)
119894(119906plusmn
119894+1) = minus
31205874119889119894
2ℎ4
6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
0 10
05
120582i= (minus04 0 1) 120582
i= (0 0 1) 120582
i= (05 0 1)
120582i= (0 0 0) 120582
i= (0 05 0) 120582
i= (0 1 0)
120582i= (1 0 minus04) 120582
i= (1 0 0) 120582
i= (1 0 05)
Figure 1 119879-119861-spline basis functions with different shape parameters
Since 119886119894+ 1198871198940
+ 1198881198940
= 1 we have the determinant of thecoefficient matrix 119863
119894given by the above linear systems of
equations as follows
1003816100381610038161003816119863119894
1003816100381610038161003816 =
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
119886119894
1 1198881198940
minus1198861198940
ℎ119894
ℎ119894minus1
119889119894minus1
119886119894
0ℎ2
119894
ℎ2
119894minus1
119889119894minus1
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
=ℎ119894(ℎ119894minus1
+ ℎ119894)
ℎ2
119894minus1
119886119894119889119894minus1
gt 0 (14)
Therefore we can conclude that 120585119894minus3
= 120585119894minus2
= 120585119894minus1
= 0 for119894 = 3 4 119899 + 1
(d) Notice that the system (1198790(119905119894 120582119894) 1198791(119905119894 120582119894) 1198792(119905119894
120582119894+1
) 1198793(119905119894 120582119894+1
)) is the optimal normalized totally positivebasis of the space119879
120582119894 120582119894+1Thus by relation (7) andTheorem 1
we can see that the system (119861119894minus3
(119906) 119861119894minus2
(119906) 119861119894minus1
(119906) 119861119894(119906)) is
a totally positive basis(e) For any 120582
119894+1 120582119894+2
120582119894+3
isin (minus12 1] direct computationwe have
119861(119896)
119894(119906+
119894) = 119861(119896)
119894(119906minus
119894+4) = 0 119896 = 0 1 2 3 5
119861119894(119906plusmn
119894+1) = 119889119894
119861119894(119906plusmn
119894+2) = 1 minus 119886
119894+2minus 119889119894+1
119861119894(119906plusmn
119894+3) = 119886119894+3
1198611015840
119894(119906plusmn
119894+1) =
120587119889119894(2 + 120582
119894+1)
2ℎ119894
1198611015840
119894(119906plusmn
119894+2) =
120587 (2 + 120582119894+2
)
2(119886119894+2
ℎ119894+2
minus119889119894+1
ℎ119894+1
)
1198611015840
119894(119906plusmn
119894+3) = minus
120587119886119894+3
(2 + 120582119894+3
)
2ℎ119894+3
11986110158401015840
119894(119906plusmn
119894+1) =
1205872119889119894(1 + 2120582
119894+1)
2ℎ2
119894
11986110158401015840
119894(119906plusmn
119894+2) = minus
1205872(1 + 2120582
119894+2)
2(119889119894+1
ℎ2
119894+1
+119886119894+2
ℎ2
119894+2
)
11986110158401015840
119894(119906plusmn
119894+3) =
1205872119886119894+3
(1 + 2120582119894+3
)
2ℎ2
119894+3
(15)
When ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ for any 120582119894+1
120582119894+2
120582119894+3
isin
(minus12 1] we have
119861101584010158401015840
119894(119906plusmn
119894+1) =
1205873119889119894(5120582119894+1
minus 2)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+2) =
1205873(5120582119894+2
minus 2) (119886119894+2
minus 119889119894+1
)
8ℎ3
119861101584010158401015840
119894(119906plusmn
119894+3) =
1205873119886119894+3
(2 minus 5120582119894+3
)
8ℎ3
(16)
Further when ℎ119894= ℎ119894+1
= ℎ119894+2
= ℎ119894+3
≜ ℎ and 120582119894+1
= 120582119894+2
=
120582119894+3
= 1 we have
119861(4)
119894(119906+
119894) = 119861(4)
119894(119906minus
119894+4) = 0
119861(4)
119894(119906plusmn
119894+1) = minus
31205874119889119894
2ℎ4
6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
119861(4)
119894(119906plusmn
119894+2) =
31205874(119886119894+2
+ 119889119894+1
)
2ℎ4
119861(4)
119894(119906plusmn
119894+3) = minus
31205874119886119894+3
2ℎ4
119861(5)
119894(119906plusmn
119894+1) = minus
571205875119889119894
32ℎ5
119861(5)
119894(119906plusmn
119894+2) =
571205875(119889119894+1
minus 119886119894+2
)
32ℎ5
119861(5)
119894(119906plusmn
119894+3) =
571205875119886119894+3
32ℎ5
(17)
This means that the conclusion is correct
So far in the discussion of the 119879-119861-spline basis we haveassumed that each knot is single On the other hand the 119879-119861-spline basis also makes sense when knots are consideredwith multiplicity 119896 le 4 For multiple knots we shrink thecorresponding intervals to zero and drop the correspondingpieces of the basis function For example if 119906
119894= 119906119894+1
is adouble knot then we define
119861119894(119906) =
1198611198941(119905119894+1
) 119906 isin [119906119894+1
119906119894+2
)
1198611198942(119905119894+2
) 119906 isin [119906119894+2
119906119894+3
)
1198611198943(119905119894+3
) 119906 isin [119906119894+3
119906119894+4
)
0 119906 notin [119906119894 119906119894+4
)
(18)
As a direct application of functions (3) and (e) inTheorem 3we have the following corollary which shows the geometricmeaning of multiple knots
Corollary 4 Suppose that a 119879-119861-spline basis 119861119894(119906) has a knot
with multiplicity 119896 (119896 = 2 3 4) at a parameter value 119906 then atthis point the continuity of the 119879-119861-spline basis is reduced from1198622 to1198623minus119896 (119862minus1means discontinuous) for any 120582
119894+1 120582119894+2
120582119894+3
isin
(minus12 1] Moreover the support interval of the basis is reducedfrom 4 segments to 5 minus 119896 segments
3 Spline Curves
31 The Construction of the Curves
Definition 5 Given control points 119875119894isin R119889 (119889 = 2 3 119894 =
0 1 119899) and a knot vector 119880 = (1199060 1199061 119906
119899+4) and an
array 120582 = (1205821 1205822 120582
119899+3) where 119899 ge 3 and all 120582
119894isin
(minus12 1] (119894 = 1 2 119899 + 3) the curve
119875 (119906) =
119899
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+1
] (19)
is called a 119879-119861-spline curve
Figure 2 119879-119861-spline curves with all 120582119894= 0
Obviously for119906 isin [119906119894 119906119894+1
] 119894 = 3 4 119899 the curve119875(119906)can be represented by curve segment
119875 (119906) =
119894
sum
119895=119894minus3
119861119895(119906) 119875119895 (20)
Analogous to the cubic 119861-spline curves since curve 119875(119906)is generated on the interval [119906
3 119906119899+1
] the choice of the firstand last three knots is free and these knots can be adjustedto give the desired boundary behavior of the curve see thefollowing descriptions
For open curves we choose the knot vector
119880 = (1199060= 1199061= 1199062= 1199063 1199064 119906
119899 119906119899+1
= 119906119899+2
= 119906119899+3
= 119906119899+4
)
(21)
This ensures that the points 1198750and 119875
119899are the end points of
the curves An example is given in Figure 2 (left)To construct closed curves we can extend the given
points 1198750 1198751 119875
119899by setting 119875
119899+1= 1198750 119875119899+2
= 1198751 and
119875119899+3
= 1198752and letting ℎ
119895= ℎ119899+119895+1
(119895 = 1 2 3 4) Thus theparametric formula for a closed curve is
119875 (119906) =
119899+3
sum
119895=0
119861119895(119906) 119875119895 119906 isin [119906
3 119906119899+4
] (22)
where 119861119895(119906) (119895 = 119899 + 1 119899 + 2 119899 + 3) are given by expanding
(3) An example is given in Figure 2 (right)Based on the properties of the 119879-119861-spline basis we can
know that the curve 119875(119906) has the following properties
(a) Curve 119875(119906) lies in the convex hull of the points119875119894minus3
119875119894minus2
119875119894minus1
119875119894for 119906 isin [119906
119894 119906119894+1
](b) Curve 119875(119906) has variation diminishing property(c) If a knot 119906
119894has multiplicity 119896 (119896 = 1 2 3 4) then the
curve 119875(119906) has 1198623minus119896 continuity at this point With auniform knot vector the curve119875(119906) has1198623 continuityfor any 120582
119894isin (minus12 1] and 1198625 continuity if all 120582
119894= 1
Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Figure 3 An ellipse represented by 119879-119861-spline curve
Figure 4 A parabola represented by 119879-119861-spline curve
32 The Representation of an Ellipse Given a uniform knotvector and given control points 119875
0= ((119909
1+ 1199092)2 1199101)
1198751= (1199091 (1199101+ 1199102)2) 119875
2= ((119909
1+ 1199092)2 1199102) and 119875
3=
(1199092 (1199101+ 1199102)2) where 119909
1= 1199092 1199101
= 1199102 The corresponding
119879-119861-spline curve with all 120582119894= 0 is a segment of an elliptic arc
whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906)) = (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
1199101+ 1199102
2+1199102minus 1199101
3sin (119905)
)
119905 isin [0120587
2]
(23)
According to the method of constructing closed curvesgiven in Section 31 adding three control points 119875
4= 1198750 1198755=
1198751 and 119875
6= 1198752 we can obtain the entire ellipse When |119909
1minus
1199092| = |1199102minus1199101| we obtain an entire circle An example is given
in Figure 3
33 The Representation of a Parabola Given a uniform knotvector and given control points 119875
0= ((1199091+ 1199092)2 1199101) 1198751=
(1199091 1199102) 1198752= 1198750 and 119875
3= (1199092 1199102) where 119909
1= 1199092 1199101
=
1199102 the corresponding 119879-119861-spline curve with all 120582
119894= 0 is a
segment of a parabola whose equation is
119875 (119906) = (
119909 (119906)
119910 (119906))
= (
1199091+ 1199092
2+1199091minus 1199092
3cos (119905)
21199101+ 1199102
3+1199102minus 1199101
3cos2 (119905)
)
119905 isin [0120587
2]
(24)
Adding a control point 1198754= 1198750 we obtain a symmetric
parabolic segment composed of two curve segments Anexample is given in Figure 4
4 Spline Surfaces
41 The Construction of the Surfaces Exactly as in theconstruction of 119861-spline tensor product surfaces from 119861-spline curves we can construct 119879-119861-spline surface from 119879-119861-spline curve For 119879-119861-spline surface the shape parametersin 119906-direction and V-direction can be different
Definition 6 Given control points 119875119894119895isin R3 (119894 = 0 1 119898
119895 = 0 1 119899) two knot vectors 119880 = (1199060 1199061 119906
119898+4) 119881 =
(V0 V1 V
119899+4) and two arrays 120582119906 = (120582
119906
1 120582119906
2 120582
119906
119898+3) 120582V =
(120582V1 120582
V2 120582
V119899+3
) where 119898 119899 ge 3 and all 120582119906119894 120582
V119895isin (minus12 1]
(119894 = 1 2 119898 + 3 119895 = 1 2 119899 + 3) then we can define a119879-119861-spline surface as follows
119875 (119906 V) =119898
sum
119896=0
119899
sum
119897=0
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897
119906 isin [1199063 119906119898+1
] V isin [V3 V119899+1
]
(25)
For 119906 isin [119906119894 119906119894+1
] and V isin [119906119895 119906119895+1
] 119894 = 3 4 119898 119895 =
3 4 119899 the surface 119875(119906 V) can be represented by surfacepatch
119875 (119906 V) =119894
sum
119896=119894minus3
119895
sum
119897=119895minus3
119861119896(119906 120582119906) 119861119897(V 120582V) 119875
119896119897 (26)
Most properties of the 119879-119861-spline surfaces follow in astraightforward way from those of the 119879-119861-spline curvesFor example if 119880 and 119881 are single knot vectors the 119879-119861-spline surfaces have 119862
2 continuity in both directions If 119880and119881 are uniform knot vectors the 119879-119861-spline surfaces have1198623 continuity in general and 119862
5 continuity when all shapeparameters are equal to 1
42 The Representation of a Surface of Revolution A surfaceof revolution is given by
119875 (119906 V) = (119903 (V) cos 119906 119903 (V) sin 119906 119911 (V))T (27)
For fixed V an isoparametric line V = const traces out acircle of radius 119903(V) called a meridian Since a circle maybe exactly represented by 119879-119861-spline curve we may find anexact representation of a surface of revolution provided wecan represent 119903(V) 119911(V) in 119879-119861-spline curve form
Themost convenient way to define a surface of revolutionis to prescribe the (planar) generating curve or generatrixgiven by 119892(V) = (119903(V) 0 119911(V))T (take the curve in 119909119900119911 planeas an example) and by the axis of revolution in the same planeas 119892
Suppose the axis of revolution is 119911-axis Assume that 119892 isgiven by a planar 119879-119861-spline curve with control points 119866
119894=
(119909119894 119911119894) (0 le 119894 le 119898) knot vector119880 and shape parameter array
120582119906 Denote 119883 = [119909
0 1199091 119909
119898] 119885 = [119911
0 1199111 119911
119899] Here 119883
and 119885 are row vectors formed by the abscissa and ordinate ofthe control points 119866
119894(0 le 119894 le 119898)
By the method given in Section 32 the 119879-119861-spline curvewith control points119862
0= (0 15)119862
1= (15 0)119862
2= (0 minus15)
1198623= (minus15 0) 119862
4= 1198620 1198625= 1198621 and 119862
6= 1198622 uniform
8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Figure 5 Surfaces of revolution represented by 119879-119861-spline surfaces
knot vector 119881 and shape parameter array 120582V of all elementsare zero which is a unit circle whose center is (0 0) Denote119862119909= [minus15 0 15 0 minus15 0 1] 119862
119910= [0 15 0 minus15 0 15 0]
and 119868 = [1 1 1 1 1 1 1] Here 119862119909and 119862
119910are row vectors
formed by the abscissa and ordinate of the control points 119862119894
(0 le 119894 le 6) 119868 is a row vector with all elements being equal to1 and it has the same dimension with 119862
119909and 119862
119910
Let119875119909119875119910 and119875
119911be (119898+1)times7matrixes defined by119875
119909(119894 )
= 119883(119894)119862119909 119875119910(119894 ) = 119883(119894)119862
119910 and 119875
119911(119894 ) = 119885(119894)119868 where 1 le
119894 le 119898+1 119875lowast(119894 ) denotes the 119894th row of thematrix119875
lowastand lowast(119894)
denotes the 119894th element of the vectorlowast Suppose119875119909119875119910 and119875
119911
are the coordinate component matrices of the control points119875119894119895(0 le 119894 le 119898 0 le 119895 le 6) Then the 119879-119861-spline surface with
control points119875119894119895 knot vectors119880 and119881 and shape parameter
arrays 120582119906 and 120582V is a surface of revolution Its generatrix is
119892(V) and its axis of revolution is 119911-axisIn this way we represent exactly ldquoclassicalrdquo surfaces such
as cylinders spheres or tori For example taking 119883 =
[1 1 1 1] and 119885 = [0 1 2 3] we obtain a cylinder Taking119883 = [minus2 minus1 1 2] and 119885 = 119883 we obtain a circular coneTaking119883 = [minus1 0 1 0 minus1] and 119885 = [0 1 0 minus1 0] we obtaina sphere Taking119883 = 2[minus1 0 1 0 minus1] and119885 = [0 1 0 minus1 0]we obtain an ellipsoid of revolution Taking 119883 = [0 minus1 0 1]
and 119885 = [0 1 0 1] we obtain a paraboloid of revolutionTaking119883 = 119862
119909minus4119868 and119885 = 119862
119910 we obtain a tori In each case
we take uniform knot vector 119880 and shape parameter array120582119906 with all elements which are equal to 0 Figure 5 shows the
results
5 Conclusion
With total positivity the 119879-119861-spline basis is suitable for con-formal design By using the 119879-119861-spline curves we can rep-resent ellipses and parabolas exactly The 119879-119861-spline curvescan be 119862
3 or 1198625 continuous by taking equidistant knots
By using the 119879-119861-spline surfaces we can represent rotatingsurfaces exactly The 119879-119861-spline surfaces can also reach 119862
3
or 1198625 continuity One of our future works is to apply the
119879-119861-spline basis to generate shape preserving interpolationcurves
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This work was supported by the National Natural ScienceFoundation of China (no 11261003)
References
[1] G Xu and G-Z Wang ldquoExtended cubic uniform B-Spline and120572-B-SplinerdquoActa Automatica Sinica vol 34 no 8 pp 980ndash9842008
[2] P Costantini P D Kaklis and C Manni ldquoPolynomial cubicsplines with tension propertiesrdquo Computer Aided GeometricDesign vol 27 no 8 pp 592ndash610 2010
[3] XHan ldquoPiecewise quartic polynomial curves with a local shapeparameterrdquo Journal of Computational and AppliedMathematicsvol 195 no 1-2 pp 34ndash45 2006
[4] X Han ldquoA class of general quartic spline curves with shapeparametersrdquo Computer Aided Geometric Design vol 28 no 3pp 151ndash163 2011
[5] G Hu X Qin X Ji et al ldquoThe construction of 120582120583-B-splinecurves and its application to rotational surfacesrdquo Applied Math-ematics and Computation vol 266 pp 194ndash211 2015
[6] X Han ldquoQuadratic trigonometric polynomial curves with ashape parameterrdquoComputer AidedGeometric Design vol 19 no7 pp 503ndash512 2002
Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[7] X Han ldquoCubic trigonometric polynomial curves with a shapeparameterrdquoComputer Aided Geometric Design vol 21 no 6 pp535ndash548 2004
[8] X Han and Y Zhu ldquoCurve construction based on five trigono-metric blending functionsrdquoBITNumericalMathematics vol 52no 4 pp 953ndash979 2012
[9] M Dube and R Sharma ldquoCubic TP B-spline curves with ashape parameterrdquo International Journal of Engineering Researchin Africa vol 11 pp 59ndash72 2013
[10] G Wang Q Chen and M Zhou ldquoNUAT B-spline curvesrdquoComputer Aided Geometric Design vol 21 no 2 pp 193ndash2052004
[11] L Yan and J Liang ldquoA class of algebraic-trigonometric blendedsplinesrdquo Journal of Computational and Applied Mathematicsvol 235 no 6 pp 1713ndash1729 2011
[12] Y Lu G Wang and X Yang ldquoUniform hyperbolic polynomialB-spline curvesrdquo Computer Aided Geometric Design vol 19 no6 pp 379ndash393 2002
[13] T N T Goodman andH B Said ldquoProperties of generalized Ballcurves and surfacesrdquo Computer-Aided Design vol 23 no 8 pp554ndash560 1991
[14] H B Said ldquoA generalized Ball curve and its recursive algo-rithmrdquoACMTransactions onGraphics vol 8 no 4 pp 360ndash3711989
[15] T N T Goodman and H B Said ldquoShape preserving propertiesof the generalised Ball basisrdquoComputer AidedGeometric Designvol 8 no 2 pp 115ndash121 1991
[16] X Han and Y Zhu ldquoTotal positivity of the cubic trigonometricBezier basisrdquo Journal of Applied Mathematics vol 2014 ArticleID 198745 5 pages 2014
[17] X-A Han Y Ma and X Huang ldquoThe cubic trigonometricBezier curve with two shape parametersrdquo Applied MathematicsLetters vol 22 no 2 pp 226ndash231 2009
[18] Y Zhu X Han and S Liu ldquoCurve construction based on four120572120573-Bernstein-like basis functionsrdquo Journal of Computationaland Applied Mathematics vol 273 pp 160ndash181 2015
[19] H Wu and X Chen ldquoCubic non-uniform trigonometric poly-nomial curves withmultiple shape parametersrdquo Journal of Com-puter-Aided Design amp Computer Graphics vol 18 no 10 pp1599ndash1606 2006
[20] X Han ldquoC2 quadratic trigonometric polynomial curves withlocal biasrdquo Journal of Computational and Applied Mathematicsvol 180 no 1 pp 161ndash172 2005
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of