Embed Size (px)
Citation preview

Research ArticleCharacterizing the Dynamic Response of a Chassis Frame ina Heavy-Duty Dump Vehicle Based on an Improved StochasticSystem Identification
Zhi Chen1 Tie Wang1 Fengshou Gu12 and Ruiliang Zhang1
1Taiyuan University of Technology Taiyuan Shanxi 030024 China2University of Huddersfield Queensgate Huddersfield HD1 3DH UK
Correspondence should be addressed to Tie Wang wangtie57163com
Received 21 April 2015 Accepted 22 July 2015
Academic Editor Carlo Trigona
Copyright copy 2015 Zhi Chen et alThis is an open access article distributed under theCreative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper presents an online method for the assessment of the dynamic performance of the chassis frame in a heavy-duty dumptruck based on a novel stochastic subspace identification (SSI) method It introduces the use of an average correlation signal as theinput data to conventional SSI methods in order to reduce the noisy and nonstationary contents in the vibration signals from theframe allowing accurate modal properties to be attained for realistically assessing the dynamic behaviour of the frame when thevehicle travels on both bumped and unpaved roads under different operating conditions The modal results show that the modalproperties obtained online are significantly different from the offline ones in that the identifiable modes are less because of theintegration of different vehicle systems onto the frame Moreover the modal shapes between 7Hz and 40Hz clearly indicate theweak section of the structure where earlier fatigues and unsafe operations may occur due to the high relative changes in the modalshapes In addition the loaded operations showmoremodes which cause high deformation on the weak sectionThese results haveverified the performance of the proposed SSI method and provide reliable references for optimizing the construction of the frame
1 Introduction
The chassis frame in a heavy-duty truck is often subjectedto extreme loads because the vehicle operates in differentdevelopment areas such as mining and construction siteswhere the road condition is commonly very poor and withhigh risks for driving The frame is needed to be not onlystrong enough to withstand complicated loads but also suf-ficiently rigid to undertake high dynamic shocks twists andvibrations due to excitations of road irregularities To meetthese requirements an accurate understanding of dynamicproperties including modal frequency damping and shapesfor the frame is necessary to minimize occurrences operat-ing with structural resonances which may cause excessivedynamic stresses and result in structure failures ride safetyproblem ride discomfort and high noise and vibration Inaddition accurate knowledge of these dynamic properties isalso important to optimize the structures for a lightweight
frame which are being paid more attention in recent years forimproving fuel efficiency and reducing greenhouse effects
However it has been found that most of studies employa combination of finite element (FE) analysis and an exper-imental verification [1ndash3] to determine the dynamic prop-erties During the experimental verification the free framewithout the integration of other components is excited bycontrolled or known inputs such as impulsive forces by animpact hammer Then both the input excitation and outputresponses are measured to estimate the modal parametersThe results obtained offline can be an important reference forpredicting the dynamics of overall system in a vehicle designprocess However in reality the frame is assembled withdifferent subsystems and can behave very differently becauseof the effect of added distribution masses and differentnonstandard constraints which are difficult to be modelledin FE calculation and are measured through conventionalcontrolled excitations Therefore an online identification
Hindawi Publishing CorporationShock and VibrationVolume 2015 Article ID 374083 15 pageshttpdxdoiorg1011552015374083
2 Shock and Vibration
12
34
56
78
910
1112
(a) (b)
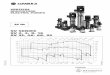
Figure 1 Testing structures and system (a) The construction of the frame and (b) the dump truck on road
method is more appreciated in order to obtain the realdynamic behaviours when the frame is applied by differentdynamic loads when the vehicle operates close to its realapplications The results obtained in such way can thenprovide reliable support for assessing and refining the overalldynamic performance of a vehicle
Amongst the many different techniques of obtaining thedynamic properties the operational modal analysis (OMA)has themost potential for online applications because it needsonly output data which is easier to be obtained Thereforeit has been used widely for the analysis of different civilstructures [4ndash6] Furthermore many variants of OMA can bepotentially useful for online dynamics analysis of the frame[7 8] In comparative studies the reference-based stochasticsubspace identification (SSIref) [7] method was deemed tobe a more accurate robust and efficient identification forOMA [9] and has been intensively explored recently in thefield of ambient vibration data based modal identificationMoreover by considering the road excitations as randominputs subspace identification methods were investigated toestimate the vehicle handling dynamic model and predict thevehicle handling performances [10 11] using data from roadtests Therefore this study is also based on this approach toimplement the online analysis of frame dynamic responses
However as the road excitations are not completelystationary and the response data can be heavily influenced bydifferent noises such as secondary vibrations from the com-ponents connected to the frame and interfering excitationsfrom power trains it has been found that the direct use ofmeasured signals including their covariances as the inputfor the SSIref algorithm can lead to numerous deceptivemodes and it is difficult to obtain a consistent result for theframe dynamics analysisThismeans that a noise suppressionmethod is required to preprocess the measured signals toimprove the signal to noise ratio (SNR) significantly foreffective use of SSIref methods On the other hand theso-called Natural Excitation Technique (NExT) uses thecorrelation technique for modal identification It was shownthat the cross-correlation signals between two responses towhite noise inputs are of the same form as free-vibrationdecay or impulse responses In studies of [12 13] the useof cross-correlation functions between response channelswas proposed and showed effectiveness for both stationary
and nonstationary white noise ambient excitation signalsfor modal parameters identification Based on these studiesincluding the super performance of correlation function inextracting periodic signals in strong noisy data an averagecorrelation signal based SSIref is therefore proposed tosuppress the noise and nonstationary responses measured onthe frame for identifying its dynamic properties
The rest of the paper has four further sections Section 2outlines the theoretical background in developing the averagecorrelation signal based SSI Section 3 verifies the perfor-mance of the method by using an offline test Section 4presents the results and discussion for the modal parametersobtained through online identification Finally the conclu-sions are given in Section 5
2 Background and Methodology
21 Frame Vibration Responses As illustrated in Figure 1 theframe concerned in this study is used in a 25-ton heavy-duty dump truck Its structure has been newly optimizedfor increased strength handling stability and lightweightperformance By using offline FE analysis and hammer basedmodal test evaluation the new framewas confirmed to have afrequency increase of about 5Hz for the first 10 modes below100Hz but its weight was 43 less than the original one
To validate these improvements in real operations thisstudy develops an online modal analysis method to assessthe dynamic characteristics of the frame through vibrationmeasurements In particular it is to check and evaluate if anysignificant vibration modes occur when the vehicle operateson different unpaved roads under loaded and unloaded con-ditions However as the vehicles often operate on temporaryunpaved roads which have very oscillatory surfaces withmany large valleys and sharp summits itmeans that the framecan be subjected to very high dynamic loads due to theseprimary excitations In addition its power train cab jointsand containers also cause significant secondary excitationswhich make measured signals very unclean As shown inFigure 2 the vibration signals which were measured withtwelve acceleration sensors uniformly distributed on theframe illustrated in Figure 1 when the vehicle travelled onunpaved roads at about 20 km with load condition showthat the signals are very nonstationary with many local large
Shock and Vibration 3
0 200
0
50 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
0 200
0
50 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
0 200
0
50 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
0 200
0
50 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50 minus50 minus50 minus50
Acc
(ms2)
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 2 Raw vibration signals and their spectra
responses Their corresponding spectra show that the signalenergy is mainly below 10Hz due to the responses of suspen-sion system effects However the frequency range from 10Hzto 100Hz which is of interest for the frame dynamic analysisshows much lower amplitudes and wider spread patternsThese show that the vibration contents contain high levels ofnoise and interfering components Therefore it is difficult toperform modal analysis using conventional OMAmethods
22 Reference-Based Stochastic Subspace Identification(SSIref) The stochastic subspace identification is developedfrom the state-space equations For a vibration system with 119899degrees of freedom (DOF) system with 119897measurements theyare expressed as
119909 (119896 + 1) = A119909 (119896) + w (119896)
119910 (119896) = C119909 (119896) + k (119896) (1)
where the system matrix is A = 119890AcΔ119905 the output allocationmatrix is C isin 119877119897times2119899 w isin 119877119899times1 is process noise vector v isin 119877119897times1is the measurement noise vector to the output equation withoutput vector 119910 isin 119877119897times1 and state variable vector is
(119905) = (
0119899times119899
I119899times119899
minusMCk minusMK)119909 (119905) = Ac119909 (119905) (2)
which is derived from the vibration system
M (119905) + Ck (119905) + K119906 (119905) = F (119905) (3)
where M Cv and K isin 119877119899times119899 denote the mass stiffness anddampingmatrices respectively (119905) (119905) and 119906(119905) isin 119877119899times1 arethe acceleration vector the velocity vector and displacementvector at continuous time 119905 and F(119905) isin 119877119899times1 is the excitingforce vector
With state-space representationmodal parameters of fre-quency 119891
119894 damping ratio 120585
119894 and vectors 120601 can be determined
using matrices Α and C through
119891119894=
120582119888
119894
2120587
120585119894=
Re (120582119888119894)
1003816100381610038161003816120582119888
119894
1003816100381610038161003816
120601 = CΦ
(4)
where the continuous-time system its eigenvalues is from itsdiscrete one by 120582119888
119894= ln(120582
119894)Δ119905 which is the diagonal value
of Λ obtained by the decomposition of Α = [Φ]Λ[Φ]minus1 [Φ]contains eigenvectors as columns
In implementing the stochastic subspace based systemidentification for estimating Α and C output data 119910 witha length 119895 (assumed to be infinitive) from 119897 sensors are
4 Shock and Vibration
organized into a Hankel matrix with 2119894 block rows and 119895columns according to the reference-based SSI scheme in [7]
H equiv 1radic119895
(
(
(
119910ref0119910ref1sdotsdotsdot 119910
ref119895minus1
119910ref1119910ref2sdotsdotsdot 119910
ref119895
sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
119910ref119894minus1119910ref119894sdotsdotsdot 119910
ref119895
119910119894 119910119894+1 sdotsdotsdot 119910119894+119895minus1
119910119894+1 119910119894+2 sdotsdotsdot 119910119894+119895sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
1199102119894minus1 1199102119894 sdotsdotsdot 1199102119894+119895minus2
)
)
)
equiv (
Yref0|119894minus1
Y119894|2119894minus1
)
equiv (
Yref119901
Y119891
)
119903119894
119897119894
ldquopastrdquoldquofuturerdquo
isin 119877(119903+1)119894times119895
(5)
Using the past reference submatrix Yref119901
from 119903 (119903 le 119897) chan-nels and future submatrix Y
119891 a covariance matrix between
all outputs and the reference channels can be calculated andgathered in a block Toeplitz matrix as
Tref1|119894= Y119891Yref119879119901=(
Λref119894Λref119894minus1sdot sdot sdot Λ
ref1
Λref119894+1Λref119894+2sdot sdot sdot Λ
ref2
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
Λref2119894minus1Λref2119894minus2sdot sdot sdot Λ
ref119894
)
isin 119877119897119894times119903119894
(6)
It can be shown that this Toeplitz matrix decomposes as
Tref1|119894
=
(
(
(
(
(
CCA
CA2
CA119894minus1
)
)
)
)
)
(A119894minus1
Gref A119894minus2
Grefsdot sdot sdot AGref Gref
)
= O119894Cref119894
(7)
where A is the discrete state matrix and C is the discreteoutput matrix Therefore the Toeplitz matrix can be basedon to estimate the observability O
119894and reference-reserved
controllability matrix Cref119894
by applying the singular decom-position to it
Tref1|119894= USV119879 = (U
1U2) (
S1O
O O)(
V1198791
V1198792
) = U1S1V1198791 (8)
in which only the significant nonzero singular values S1are
reserved and those close to zeros due to noise influences areignored leading to
O119894= U1S121
Cref119894= S121
V1198791
(9)
Based on (9) the system matrix C can be constructed to bethe first 119897 rows of O
119894and Gref is the last 119903 columns of Cref
119894
Consequently the system matrix A can be found by usinganother shifted block Toeplitz matrix through
A = Sminus121
U1198791Tref2|119894+1
V1Sminus121
(10)
which is due to the relationship of Tref2|119894+1 = O
119894ACref119894 This
means that the system matrices A C in (1) can be recoveredusing the output covariance data matrices However in prac-tice the data length 119895 is limited and therefore the covariancesexpressed in (6) are just estimates This means that theseestimates may vary from measurements to measurementswhen data contains inevitable nonstationary contents whichwill result in uncertainties in identification results Moreoverwhen the SNR of measurements is low the identificationresults may not be convergent
In addition because of the influences of different noisesthe higher singular values in (8) are not zeros which makesit difficult to identify the system order 119899 Therefore it is oftennecessary to use a stabilization diagram to determine 119899 andcorresponding model parameters
Conventionally the stabilization diagram is constructedby the increments of system order 119899 at a fixed row numberHowever recent studies [10 14 15] show that the efficiencyand accuracy of identification also depend on the variationof the row number 119894 of the Hankel matrix and hence leadto an alternative stabilization diagram that is formed byconsecutive increments of the row number 119894 at a fixedorder 119899 and show more effectiveness compared with theconventional one However it needs to specify 119899 first whichis usually unknown for most applications To overcome thisshortage this study constructs the alternative stabilizationdiagram by varying the order 119899 simultaneously at eachincrement 119894 This then ensures that significant modes canbe selected automatically without the need to specify 119899 inadvance
23 Eigen Realization Algorithm with Data Correlation(ERADC) However in implementing Cov-SSI as the datalength 119895 is limited the covariances expressed in (5) arejust estimates It means that these estimates may vary frommeasurements to measurements Especially when data con-tains inevitable nonstationary effects and high noise contentsidentification results will have high uncertainties To over-come these shortages many researches have been made overyear Of particular interest are the ERA based approaches asthey can produce superior identification results with boththe conventional impulse response data [16] and the latestcorrelation data induced by white noise inputs [17]
As shown in [18] the correlation signal between tworesponses from white noise excitations is equivalent to theimpulse responses of a dynamic system It means that thecorrelation signal can be used directly for the time domainbased identification methods In [19 20] the correlationsignals were employed to construct the block Hankel matrixin implementing the standard ERA developed based onimpulse inputs rather than a white noise These show thatfrom the scheme of ERA based identification matrix in (5)
Shock and Vibration 5
can be viewed as the impulse responses that is the Markovparameters in ERA In this way Cov-SSI is the same as ERAand the improvements made on ERA can be applied to Cov-SSI
To reduce noise influences Juang et al [21] improve ERAby using correlation data of impulse responses and namedit as ERA with data correlation (ERADC) As shown inERADC the correlation data of the block Hankel matrixconstructed from impulse responses also consists of the infor-mation of system matrix It means that a further correlationof the correlation matrix of (5) can be calculated by (11) forsystem identifications
TT119902= T (119902)T (0)119879 isin R119897119894times119897119894 (11)
where the zero-lag correlation T(0) = Yref119901Yref119879119901
Accordingto this relationship and the way of constructing (5) a newblock Toeplitz matrix can be constructed from the furthercorrelation data and named as the further correlation matrixwhich can be expressed as
Uref1|119894(119902) = (
TT119902+1
TT119902+2sdot sdot sdot TT
119902+119887
TT119902+2
TT119902+3sdot sdot sdot TT
119902+119887minus1
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
TT119902+119886
TT119902+119886minus1sdot sdot sdot TT
119902+119886+119887
)
isin R119886119897119894times119887119897119894
(12)
As this block Toeplitz matrix also contains the information ofsystemmatrix in the format of (6) the SVDprocess expressedin (4) can be applied to it to estimate the system matrixA and subsequently calculate modal parameters using (4)However as the effect of more noise reduction and possiblenonstationary suppression due to the further correlationoperations this further correlation matrix based SSI will givemore accurate results which will be evaluated in the nextsection
24 Average Correlation Signal Based Covariance DrivenStochastic Subspace Identification (Acs-Cov-SSI) To reducethe deficiency of in implementing Cov-SSIref the correla-tion signals between sensors are taken as the inputMoreoverthe correlation signal can be considered as the free-vibrationdecay or the impulse responses of a dynamic system [12] andhas been used in various time domain based identificationmethods
The correlation signals are equivalent to the impulseresponses whose spectra are infinitely wide in theory Thusthey can be taken unsurprisingly to be the output of state-space equation corresponding to white noise excitationswhich meets the fundamental assumption when SSI schemeis developed Subsequently aHankel datamatrix as expressedin (5) can be constructed using the correlation signalsrather than the raw response signals In the same way theircovariance data matrixes of correlation signals also have theform of (7) Therefore a correlation signal based Cov-SSIrefcan be implemented for SSI
However the correlation signals estimated from one datarecord are often not sufficiently effective to suppress the noiseand nonstationary influences when their contents are veryhigh such as that of the vibration responses of the truck framepresented in Section 21 Usually there are multiple datarecords available which may be collected under similar ordifferent operating conditions Thus it is natural to combinethese records together for obtaining a more reliable identifi-cation result As correlation signals can be calculated using aspecified reference sensor for all different records the phaseinformation between different records can be preservedby these reference-based correlation signals and hence anaverage of the correlation signals can be performed betweendifferent data records The average will thus enhance thecontents with regular or periodic components by suppressingthe irregular random contents in different data recordsParticularly the component that associates with one of thesystem modes is often the more significant one Moreoverits autocorrelation signal of the reference sensor always has azero-phase in different data recordsTherefore the average ofthe autocorrelation signals from different records effectivelyimproves the SNR of the resultant correlation signals Simul-taneously as cross-correlation signals maintain the relativephase connections to the reference signals the average alsoenhances the desired regular components and suppresses thenoise contents Specifically the average correlation signalscan be obtained by the following key steps
(1) Obtain 119896 numbers of data segments from 119897 channelsmeasurements either by using multiple measurementrecords or by segregating a very long record into smallones
(2) Select a reference channel such as 119901 which mayhave better SNR through a spectrum analysis or ananalytical analysis to estimate which of the sensors isless influenced by interferences For instance as theengine and power trainmay causemore influences onthe sensors in the front of the frame one of the sensorswhich is at rear can be used as the reference
(3) Calculate the auto- and cross-correlation signals ofeach segment with 119873 samples for different channels119894 = 1 2 119897 when taking the channel 119901 as thereference channel Consider
119903119894119901(120591) =
1
119873 minus 119894
119873minus119902minus1
sum
119902=0
119910119894(119902 + 120591) 119910
119901(119902) (13)
which can be calculated using the fast Fourier trans-form (FFT) algorithm to improve overall identifica-tion efficiency
(4) Average the correlation signals from different seg-ments to obtain the average correlation signals forcorresponding channels
119903119894119901(120591) =
1
119896
119896
sum
119896=1
119903119894119901
119896(120591) (14)
6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
12
34
56
78
910
1112
(a) (b)
Figure 1 Testing structures and system (a) The construction of the frame and (b) the dump truck on road
method is more appreciated in order to obtain the realdynamic behaviours when the frame is applied by differentdynamic loads when the vehicle operates close to its realapplications The results obtained in such way can thenprovide reliable support for assessing and refining the overalldynamic performance of a vehicle
Amongst the many different techniques of obtaining thedynamic properties the operational modal analysis (OMA)has themost potential for online applications because it needsonly output data which is easier to be obtained Thereforeit has been used widely for the analysis of different civilstructures [4ndash6] Furthermore many variants of OMA can bepotentially useful for online dynamics analysis of the frame[7 8] In comparative studies the reference-based stochasticsubspace identification (SSIref) [7] method was deemed tobe a more accurate robust and efficient identification forOMA [9] and has been intensively explored recently in thefield of ambient vibration data based modal identificationMoreover by considering the road excitations as randominputs subspace identification methods were investigated toestimate the vehicle handling dynamic model and predict thevehicle handling performances [10 11] using data from roadtests Therefore this study is also based on this approach toimplement the online analysis of frame dynamic responses
However as the road excitations are not completelystationary and the response data can be heavily influenced bydifferent noises such as secondary vibrations from the com-ponents connected to the frame and interfering excitationsfrom power trains it has been found that the direct use ofmeasured signals including their covariances as the inputfor the SSIref algorithm can lead to numerous deceptivemodes and it is difficult to obtain a consistent result for theframe dynamics analysisThismeans that a noise suppressionmethod is required to preprocess the measured signals toimprove the signal to noise ratio (SNR) significantly foreffective use of SSIref methods On the other hand theso-called Natural Excitation Technique (NExT) uses thecorrelation technique for modal identification It was shownthat the cross-correlation signals between two responses towhite noise inputs are of the same form as free-vibrationdecay or impulse responses In studies of [12 13] the useof cross-correlation functions between response channelswas proposed and showed effectiveness for both stationary
and nonstationary white noise ambient excitation signalsfor modal parameters identification Based on these studiesincluding the super performance of correlation function inextracting periodic signals in strong noisy data an averagecorrelation signal based SSIref is therefore proposed tosuppress the noise and nonstationary responses measured onthe frame for identifying its dynamic properties
The rest of the paper has four further sections Section 2outlines the theoretical background in developing the averagecorrelation signal based SSI Section 3 verifies the perfor-mance of the method by using an offline test Section 4presents the results and discussion for the modal parametersobtained through online identification Finally the conclu-sions are given in Section 5
2 Background and Methodology
21 Frame Vibration Responses As illustrated in Figure 1 theframe concerned in this study is used in a 25-ton heavy-duty dump truck Its structure has been newly optimizedfor increased strength handling stability and lightweightperformance By using offline FE analysis and hammer basedmodal test evaluation the new framewas confirmed to have afrequency increase of about 5Hz for the first 10 modes below100Hz but its weight was 43 less than the original one
To validate these improvements in real operations thisstudy develops an online modal analysis method to assessthe dynamic characteristics of the frame through vibrationmeasurements In particular it is to check and evaluate if anysignificant vibration modes occur when the vehicle operateson different unpaved roads under loaded and unloaded con-ditions However as the vehicles often operate on temporaryunpaved roads which have very oscillatory surfaces withmany large valleys and sharp summits itmeans that the framecan be subjected to very high dynamic loads due to theseprimary excitations In addition its power train cab jointsand containers also cause significant secondary excitationswhich make measured signals very unclean As shown inFigure 2 the vibration signals which were measured withtwelve acceleration sensors uniformly distributed on theframe illustrated in Figure 1 when the vehicle travelled onunpaved roads at about 20 km with load condition showthat the signals are very nonstationary with many local large
Shock and Vibration 3
0 200
0
50 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
0 200
0
50 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
0 200
0
50 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
0 200
0
50 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50 minus50 minus50 minus50
Acc
(ms2)
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 2 Raw vibration signals and their spectra
responses Their corresponding spectra show that the signalenergy is mainly below 10Hz due to the responses of suspen-sion system effects However the frequency range from 10Hzto 100Hz which is of interest for the frame dynamic analysisshows much lower amplitudes and wider spread patternsThese show that the vibration contents contain high levels ofnoise and interfering components Therefore it is difficult toperform modal analysis using conventional OMAmethods
22 Reference-Based Stochastic Subspace Identification(SSIref) The stochastic subspace identification is developedfrom the state-space equations For a vibration system with 119899degrees of freedom (DOF) system with 119897measurements theyare expressed as
119909 (119896 + 1) = A119909 (119896) + w (119896)
119910 (119896) = C119909 (119896) + k (119896) (1)
where the system matrix is A = 119890AcΔ119905 the output allocationmatrix is C isin 119877119897times2119899 w isin 119877119899times1 is process noise vector v isin 119877119897times1is the measurement noise vector to the output equation withoutput vector 119910 isin 119877119897times1 and state variable vector is
(119905) = (
0119899times119899
I119899times119899
minusMCk minusMK)119909 (119905) = Ac119909 (119905) (2)
which is derived from the vibration system
M (119905) + Ck (119905) + K119906 (119905) = F (119905) (3)
where M Cv and K isin 119877119899times119899 denote the mass stiffness anddampingmatrices respectively (119905) (119905) and 119906(119905) isin 119877119899times1 arethe acceleration vector the velocity vector and displacementvector at continuous time 119905 and F(119905) isin 119877119899times1 is the excitingforce vector
With state-space representationmodal parameters of fre-quency 119891
119894 damping ratio 120585
119894 and vectors 120601 can be determined
using matrices Α and C through
119891119894=
120582119888
119894
2120587
120585119894=
Re (120582119888119894)
1003816100381610038161003816120582119888
119894
1003816100381610038161003816
120601 = CΦ
(4)
where the continuous-time system its eigenvalues is from itsdiscrete one by 120582119888
119894= ln(120582
119894)Δ119905 which is the diagonal value
of Λ obtained by the decomposition of Α = [Φ]Λ[Φ]minus1 [Φ]contains eigenvectors as columns
In implementing the stochastic subspace based systemidentification for estimating Α and C output data 119910 witha length 119895 (assumed to be infinitive) from 119897 sensors are
4 Shock and Vibration
organized into a Hankel matrix with 2119894 block rows and 119895columns according to the reference-based SSI scheme in [7]
H equiv 1radic119895
(
(
(
119910ref0119910ref1sdotsdotsdot 119910
ref119895minus1
119910ref1119910ref2sdotsdotsdot 119910
ref119895
sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
119910ref119894minus1119910ref119894sdotsdotsdot 119910
ref119895
119910119894 119910119894+1 sdotsdotsdot 119910119894+119895minus1
119910119894+1 119910119894+2 sdotsdotsdot 119910119894+119895sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
1199102119894minus1 1199102119894 sdotsdotsdot 1199102119894+119895minus2
)
)
)
equiv (
Yref0|119894minus1
Y119894|2119894minus1
)
equiv (
Yref119901
Y119891
)
119903119894
119897119894
ldquopastrdquoldquofuturerdquo
isin 119877(119903+1)119894times119895
(5)
Using the past reference submatrix Yref119901
from 119903 (119903 le 119897) chan-nels and future submatrix Y
119891 a covariance matrix between
all outputs and the reference channels can be calculated andgathered in a block Toeplitz matrix as
Tref1|119894= Y119891Yref119879119901=(
Λref119894Λref119894minus1sdot sdot sdot Λ
ref1
Λref119894+1Λref119894+2sdot sdot sdot Λ
ref2
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
Λref2119894minus1Λref2119894minus2sdot sdot sdot Λ
ref119894
)
isin 119877119897119894times119903119894
(6)
It can be shown that this Toeplitz matrix decomposes as
Tref1|119894
=
(
(
(
(
(
CCA
CA2
CA119894minus1
)
)
)
)
)
(A119894minus1
Gref A119894minus2
Grefsdot sdot sdot AGref Gref
)
= O119894Cref119894
(7)
where A is the discrete state matrix and C is the discreteoutput matrix Therefore the Toeplitz matrix can be basedon to estimate the observability O
119894and reference-reserved
controllability matrix Cref119894
by applying the singular decom-position to it
Tref1|119894= USV119879 = (U
1U2) (
S1O
O O)(
V1198791
V1198792
) = U1S1V1198791 (8)
in which only the significant nonzero singular values S1are
reserved and those close to zeros due to noise influences areignored leading to
O119894= U1S121
Cref119894= S121
V1198791
(9)
Based on (9) the system matrix C can be constructed to bethe first 119897 rows of O
119894and Gref is the last 119903 columns of Cref
119894
Consequently the system matrix A can be found by usinganother shifted block Toeplitz matrix through
A = Sminus121
U1198791Tref2|119894+1
V1Sminus121
(10)
which is due to the relationship of Tref2|119894+1 = O
119894ACref119894 This
means that the system matrices A C in (1) can be recoveredusing the output covariance data matrices However in prac-tice the data length 119895 is limited and therefore the covariancesexpressed in (6) are just estimates This means that theseestimates may vary from measurements to measurementswhen data contains inevitable nonstationary contents whichwill result in uncertainties in identification results Moreoverwhen the SNR of measurements is low the identificationresults may not be convergent
In addition because of the influences of different noisesthe higher singular values in (8) are not zeros which makesit difficult to identify the system order 119899 Therefore it is oftennecessary to use a stabilization diagram to determine 119899 andcorresponding model parameters
Conventionally the stabilization diagram is constructedby the increments of system order 119899 at a fixed row numberHowever recent studies [10 14 15] show that the efficiencyand accuracy of identification also depend on the variationof the row number 119894 of the Hankel matrix and hence leadto an alternative stabilization diagram that is formed byconsecutive increments of the row number 119894 at a fixedorder 119899 and show more effectiveness compared with theconventional one However it needs to specify 119899 first whichis usually unknown for most applications To overcome thisshortage this study constructs the alternative stabilizationdiagram by varying the order 119899 simultaneously at eachincrement 119894 This then ensures that significant modes canbe selected automatically without the need to specify 119899 inadvance
23 Eigen Realization Algorithm with Data Correlation(ERADC) However in implementing Cov-SSI as the datalength 119895 is limited the covariances expressed in (5) arejust estimates It means that these estimates may vary frommeasurements to measurements Especially when data con-tains inevitable nonstationary effects and high noise contentsidentification results will have high uncertainties To over-come these shortages many researches have been made overyear Of particular interest are the ERA based approaches asthey can produce superior identification results with boththe conventional impulse response data [16] and the latestcorrelation data induced by white noise inputs [17]
As shown in [18] the correlation signal between tworesponses from white noise excitations is equivalent to theimpulse responses of a dynamic system It means that thecorrelation signal can be used directly for the time domainbased identification methods In [19 20] the correlationsignals were employed to construct the block Hankel matrixin implementing the standard ERA developed based onimpulse inputs rather than a white noise These show thatfrom the scheme of ERA based identification matrix in (5)
Shock and Vibration 5
can be viewed as the impulse responses that is the Markovparameters in ERA In this way Cov-SSI is the same as ERAand the improvements made on ERA can be applied to Cov-SSI
To reduce noise influences Juang et al [21] improve ERAby using correlation data of impulse responses and namedit as ERA with data correlation (ERADC) As shown inERADC the correlation data of the block Hankel matrixconstructed from impulse responses also consists of the infor-mation of system matrix It means that a further correlationof the correlation matrix of (5) can be calculated by (11) forsystem identifications
TT119902= T (119902)T (0)119879 isin R119897119894times119897119894 (11)
where the zero-lag correlation T(0) = Yref119901Yref119879119901
Accordingto this relationship and the way of constructing (5) a newblock Toeplitz matrix can be constructed from the furthercorrelation data and named as the further correlation matrixwhich can be expressed as
Uref1|119894(119902) = (
TT119902+1
TT119902+2sdot sdot sdot TT
119902+119887
TT119902+2
TT119902+3sdot sdot sdot TT
119902+119887minus1
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
TT119902+119886
TT119902+119886minus1sdot sdot sdot TT
119902+119886+119887
)
isin R119886119897119894times119887119897119894
(12)
As this block Toeplitz matrix also contains the information ofsystemmatrix in the format of (6) the SVDprocess expressedin (4) can be applied to it to estimate the system matrixA and subsequently calculate modal parameters using (4)However as the effect of more noise reduction and possiblenonstationary suppression due to the further correlationoperations this further correlation matrix based SSI will givemore accurate results which will be evaluated in the nextsection
24 Average Correlation Signal Based Covariance DrivenStochastic Subspace Identification (Acs-Cov-SSI) To reducethe deficiency of in implementing Cov-SSIref the correla-tion signals between sensors are taken as the inputMoreoverthe correlation signal can be considered as the free-vibrationdecay or the impulse responses of a dynamic system [12] andhas been used in various time domain based identificationmethods
The correlation signals are equivalent to the impulseresponses whose spectra are infinitely wide in theory Thusthey can be taken unsurprisingly to be the output of state-space equation corresponding to white noise excitationswhich meets the fundamental assumption when SSI schemeis developed Subsequently aHankel datamatrix as expressedin (5) can be constructed using the correlation signalsrather than the raw response signals In the same way theircovariance data matrixes of correlation signals also have theform of (7) Therefore a correlation signal based Cov-SSIrefcan be implemented for SSI
However the correlation signals estimated from one datarecord are often not sufficiently effective to suppress the noiseand nonstationary influences when their contents are veryhigh such as that of the vibration responses of the truck framepresented in Section 21 Usually there are multiple datarecords available which may be collected under similar ordifferent operating conditions Thus it is natural to combinethese records together for obtaining a more reliable identifi-cation result As correlation signals can be calculated using aspecified reference sensor for all different records the phaseinformation between different records can be preservedby these reference-based correlation signals and hence anaverage of the correlation signals can be performed betweendifferent data records The average will thus enhance thecontents with regular or periodic components by suppressingthe irregular random contents in different data recordsParticularly the component that associates with one of thesystem modes is often the more significant one Moreoverits autocorrelation signal of the reference sensor always has azero-phase in different data recordsTherefore the average ofthe autocorrelation signals from different records effectivelyimproves the SNR of the resultant correlation signals Simul-taneously as cross-correlation signals maintain the relativephase connections to the reference signals the average alsoenhances the desired regular components and suppresses thenoise contents Specifically the average correlation signalscan be obtained by the following key steps
(1) Obtain 119896 numbers of data segments from 119897 channelsmeasurements either by using multiple measurementrecords or by segregating a very long record into smallones
(2) Select a reference channel such as 119901 which mayhave better SNR through a spectrum analysis or ananalytical analysis to estimate which of the sensors isless influenced by interferences For instance as theengine and power trainmay causemore influences onthe sensors in the front of the frame one of the sensorswhich is at rear can be used as the reference
(3) Calculate the auto- and cross-correlation signals ofeach segment with 119873 samples for different channels119894 = 1 2 119897 when taking the channel 119901 as thereference channel Consider
119903119894119901(120591) =
1
119873 minus 119894
119873minus119902minus1
sum
119902=0
119910119894(119902 + 120591) 119910
119901(119902) (13)
which can be calculated using the fast Fourier trans-form (FFT) algorithm to improve overall identifica-tion efficiency
(4) Average the correlation signals from different seg-ments to obtain the average correlation signals forcorresponding channels
119903119894119901(120591) =
1
119896
119896
sum
119896=1
119903119894119901
119896(120591) (14)
6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
0 200
0
50 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
0 200
0
50 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
0 200
0
50 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
0 200
0
50 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50 minus50 minus50 minus50
Acc
(ms2)
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 2 Raw vibration signals and their spectra
responses Their corresponding spectra show that the signalenergy is mainly below 10Hz due to the responses of suspen-sion system effects However the frequency range from 10Hzto 100Hz which is of interest for the frame dynamic analysisshows much lower amplitudes and wider spread patternsThese show that the vibration contents contain high levels ofnoise and interfering components Therefore it is difficult toperform modal analysis using conventional OMAmethods
22 Reference-Based Stochastic Subspace Identification(SSIref) The stochastic subspace identification is developedfrom the state-space equations For a vibration system with 119899degrees of freedom (DOF) system with 119897measurements theyare expressed as
119909 (119896 + 1) = A119909 (119896) + w (119896)
119910 (119896) = C119909 (119896) + k (119896) (1)
where the system matrix is A = 119890AcΔ119905 the output allocationmatrix is C isin 119877119897times2119899 w isin 119877119899times1 is process noise vector v isin 119877119897times1is the measurement noise vector to the output equation withoutput vector 119910 isin 119877119897times1 and state variable vector is
(119905) = (
0119899times119899
I119899times119899
minusMCk minusMK)119909 (119905) = Ac119909 (119905) (2)
which is derived from the vibration system
M (119905) + Ck (119905) + K119906 (119905) = F (119905) (3)
where M Cv and K isin 119877119899times119899 denote the mass stiffness anddampingmatrices respectively (119905) (119905) and 119906(119905) isin 119877119899times1 arethe acceleration vector the velocity vector and displacementvector at continuous time 119905 and F(119905) isin 119877119899times1 is the excitingforce vector
With state-space representationmodal parameters of fre-quency 119891
119894 damping ratio 120585
119894 and vectors 120601 can be determined
using matrices Α and C through
119891119894=
120582119888
119894
2120587
120585119894=
Re (120582119888119894)
1003816100381610038161003816120582119888
119894
1003816100381610038161003816
120601 = CΦ
(4)
where the continuous-time system its eigenvalues is from itsdiscrete one by 120582119888
119894= ln(120582
119894)Δ119905 which is the diagonal value
of Λ obtained by the decomposition of Α = [Φ]Λ[Φ]minus1 [Φ]contains eigenvectors as columns
In implementing the stochastic subspace based systemidentification for estimating Α and C output data 119910 witha length 119895 (assumed to be infinitive) from 119897 sensors are
4 Shock and Vibration
organized into a Hankel matrix with 2119894 block rows and 119895columns according to the reference-based SSI scheme in [7]
H equiv 1radic119895
(
(
(
119910ref0119910ref1sdotsdotsdot 119910
ref119895minus1
119910ref1119910ref2sdotsdotsdot 119910
ref119895
sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
119910ref119894minus1119910ref119894sdotsdotsdot 119910
ref119895
119910119894 119910119894+1 sdotsdotsdot 119910119894+119895minus1
119910119894+1 119910119894+2 sdotsdotsdot 119910119894+119895sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
1199102119894minus1 1199102119894 sdotsdotsdot 1199102119894+119895minus2
)
)
)
equiv (
Yref0|119894minus1
Y119894|2119894minus1
)
equiv (
Yref119901
Y119891
)
119903119894
119897119894
ldquopastrdquoldquofuturerdquo
isin 119877(119903+1)119894times119895
(5)
Using the past reference submatrix Yref119901
from 119903 (119903 le 119897) chan-nels and future submatrix Y
119891 a covariance matrix between
all outputs and the reference channels can be calculated andgathered in a block Toeplitz matrix as
Tref1|119894= Y119891Yref119879119901=(
Λref119894Λref119894minus1sdot sdot sdot Λ
ref1
Λref119894+1Λref119894+2sdot sdot sdot Λ
ref2
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
Λref2119894minus1Λref2119894minus2sdot sdot sdot Λ
ref119894
)
isin 119877119897119894times119903119894
(6)
It can be shown that this Toeplitz matrix decomposes as
Tref1|119894
=
(
(
(
(
(
CCA
CA2
CA119894minus1
)
)
)
)
)
(A119894minus1
Gref A119894minus2
Grefsdot sdot sdot AGref Gref
)
= O119894Cref119894
(7)
where A is the discrete state matrix and C is the discreteoutput matrix Therefore the Toeplitz matrix can be basedon to estimate the observability O
119894and reference-reserved
controllability matrix Cref119894
by applying the singular decom-position to it
Tref1|119894= USV119879 = (U
1U2) (
S1O
O O)(
V1198791
V1198792
) = U1S1V1198791 (8)
in which only the significant nonzero singular values S1are
reserved and those close to zeros due to noise influences areignored leading to
O119894= U1S121
Cref119894= S121
V1198791
(9)
Based on (9) the system matrix C can be constructed to bethe first 119897 rows of O
119894and Gref is the last 119903 columns of Cref
119894
Consequently the system matrix A can be found by usinganother shifted block Toeplitz matrix through
A = Sminus121
U1198791Tref2|119894+1
V1Sminus121
(10)
which is due to the relationship of Tref2|119894+1 = O
119894ACref119894 This
means that the system matrices A C in (1) can be recoveredusing the output covariance data matrices However in prac-tice the data length 119895 is limited and therefore the covariancesexpressed in (6) are just estimates This means that theseestimates may vary from measurements to measurementswhen data contains inevitable nonstationary contents whichwill result in uncertainties in identification results Moreoverwhen the SNR of measurements is low the identificationresults may not be convergent
In addition because of the influences of different noisesthe higher singular values in (8) are not zeros which makesit difficult to identify the system order 119899 Therefore it is oftennecessary to use a stabilization diagram to determine 119899 andcorresponding model parameters
Conventionally the stabilization diagram is constructedby the increments of system order 119899 at a fixed row numberHowever recent studies [10 14 15] show that the efficiencyand accuracy of identification also depend on the variationof the row number 119894 of the Hankel matrix and hence leadto an alternative stabilization diagram that is formed byconsecutive increments of the row number 119894 at a fixedorder 119899 and show more effectiveness compared with theconventional one However it needs to specify 119899 first whichis usually unknown for most applications To overcome thisshortage this study constructs the alternative stabilizationdiagram by varying the order 119899 simultaneously at eachincrement 119894 This then ensures that significant modes canbe selected automatically without the need to specify 119899 inadvance
23 Eigen Realization Algorithm with Data Correlation(ERADC) However in implementing Cov-SSI as the datalength 119895 is limited the covariances expressed in (5) arejust estimates It means that these estimates may vary frommeasurements to measurements Especially when data con-tains inevitable nonstationary effects and high noise contentsidentification results will have high uncertainties To over-come these shortages many researches have been made overyear Of particular interest are the ERA based approaches asthey can produce superior identification results with boththe conventional impulse response data [16] and the latestcorrelation data induced by white noise inputs [17]
As shown in [18] the correlation signal between tworesponses from white noise excitations is equivalent to theimpulse responses of a dynamic system It means that thecorrelation signal can be used directly for the time domainbased identification methods In [19 20] the correlationsignals were employed to construct the block Hankel matrixin implementing the standard ERA developed based onimpulse inputs rather than a white noise These show thatfrom the scheme of ERA based identification matrix in (5)
Shock and Vibration 5
can be viewed as the impulse responses that is the Markovparameters in ERA In this way Cov-SSI is the same as ERAand the improvements made on ERA can be applied to Cov-SSI
To reduce noise influences Juang et al [21] improve ERAby using correlation data of impulse responses and namedit as ERA with data correlation (ERADC) As shown inERADC the correlation data of the block Hankel matrixconstructed from impulse responses also consists of the infor-mation of system matrix It means that a further correlationof the correlation matrix of (5) can be calculated by (11) forsystem identifications
TT119902= T (119902)T (0)119879 isin R119897119894times119897119894 (11)
where the zero-lag correlation T(0) = Yref119901Yref119879119901
Accordingto this relationship and the way of constructing (5) a newblock Toeplitz matrix can be constructed from the furthercorrelation data and named as the further correlation matrixwhich can be expressed as
Uref1|119894(119902) = (
TT119902+1
TT119902+2sdot sdot sdot TT
119902+119887
TT119902+2
TT119902+3sdot sdot sdot TT
119902+119887minus1
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
TT119902+119886
TT119902+119886minus1sdot sdot sdot TT
119902+119886+119887
)
isin R119886119897119894times119887119897119894
(12)
As this block Toeplitz matrix also contains the information ofsystemmatrix in the format of (6) the SVDprocess expressedin (4) can be applied to it to estimate the system matrixA and subsequently calculate modal parameters using (4)However as the effect of more noise reduction and possiblenonstationary suppression due to the further correlationoperations this further correlation matrix based SSI will givemore accurate results which will be evaluated in the nextsection
24 Average Correlation Signal Based Covariance DrivenStochastic Subspace Identification (Acs-Cov-SSI) To reducethe deficiency of in implementing Cov-SSIref the correla-tion signals between sensors are taken as the inputMoreoverthe correlation signal can be considered as the free-vibrationdecay or the impulse responses of a dynamic system [12] andhas been used in various time domain based identificationmethods
The correlation signals are equivalent to the impulseresponses whose spectra are infinitely wide in theory Thusthey can be taken unsurprisingly to be the output of state-space equation corresponding to white noise excitationswhich meets the fundamental assumption when SSI schemeis developed Subsequently aHankel datamatrix as expressedin (5) can be constructed using the correlation signalsrather than the raw response signals In the same way theircovariance data matrixes of correlation signals also have theform of (7) Therefore a correlation signal based Cov-SSIrefcan be implemented for SSI
However the correlation signals estimated from one datarecord are often not sufficiently effective to suppress the noiseand nonstationary influences when their contents are veryhigh such as that of the vibration responses of the truck framepresented in Section 21 Usually there are multiple datarecords available which may be collected under similar ordifferent operating conditions Thus it is natural to combinethese records together for obtaining a more reliable identifi-cation result As correlation signals can be calculated using aspecified reference sensor for all different records the phaseinformation between different records can be preservedby these reference-based correlation signals and hence anaverage of the correlation signals can be performed betweendifferent data records The average will thus enhance thecontents with regular or periodic components by suppressingthe irregular random contents in different data recordsParticularly the component that associates with one of thesystem modes is often the more significant one Moreoverits autocorrelation signal of the reference sensor always has azero-phase in different data recordsTherefore the average ofthe autocorrelation signals from different records effectivelyimproves the SNR of the resultant correlation signals Simul-taneously as cross-correlation signals maintain the relativephase connections to the reference signals the average alsoenhances the desired regular components and suppresses thenoise contents Specifically the average correlation signalscan be obtained by the following key steps
(1) Obtain 119896 numbers of data segments from 119897 channelsmeasurements either by using multiple measurementrecords or by segregating a very long record into smallones
(2) Select a reference channel such as 119901 which mayhave better SNR through a spectrum analysis or ananalytical analysis to estimate which of the sensors isless influenced by interferences For instance as theengine and power trainmay causemore influences onthe sensors in the front of the frame one of the sensorswhich is at rear can be used as the reference
(3) Calculate the auto- and cross-correlation signals ofeach segment with 119873 samples for different channels119894 = 1 2 119897 when taking the channel 119901 as thereference channel Consider
119903119894119901(120591) =
1
119873 minus 119894
119873minus119902minus1
sum
119902=0
119910119894(119902 + 120591) 119910
119901(119902) (13)
which can be calculated using the fast Fourier trans-form (FFT) algorithm to improve overall identifica-tion efficiency
(4) Average the correlation signals from different seg-ments to obtain the average correlation signals forcorresponding channels
119903119894119901(120591) =
1
119896
119896
sum
119896=1
119903119894119901
119896(120591) (14)
6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
organized into a Hankel matrix with 2119894 block rows and 119895columns according to the reference-based SSI scheme in [7]
H equiv 1radic119895
(
(
(
119910ref0119910ref1sdotsdotsdot 119910
ref119895minus1
119910ref1119910ref2sdotsdotsdot 119910
ref119895
sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
119910ref119894minus1119910ref119894sdotsdotsdot 119910
ref119895
119910119894 119910119894+1 sdotsdotsdot 119910119894+119895minus1
119910119894+1 119910119894+2 sdotsdotsdot 119910119894+119895sdotsdotsdot sdotsdotsdot sdotsdotsdot sdotsdotsdot
1199102119894minus1 1199102119894 sdotsdotsdot 1199102119894+119895minus2
)
)
)
equiv (
Yref0|119894minus1
Y119894|2119894minus1
)
equiv (
Yref119901
Y119891
)
119903119894
119897119894
ldquopastrdquoldquofuturerdquo
isin 119877(119903+1)119894times119895
(5)
Using the past reference submatrix Yref119901
from 119903 (119903 le 119897) chan-nels and future submatrix Y
119891 a covariance matrix between
all outputs and the reference channels can be calculated andgathered in a block Toeplitz matrix as
Tref1|119894= Y119891Yref119879119901=(
Λref119894Λref119894minus1sdot sdot sdot Λ
ref1
Λref119894+1Λref119894+2sdot sdot sdot Λ
ref2
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
Λref2119894minus1Λref2119894minus2sdot sdot sdot Λ
ref119894
)
isin 119877119897119894times119903119894
(6)
It can be shown that this Toeplitz matrix decomposes as
Tref1|119894
=
(
(
(
(
(
CCA
CA2
CA119894minus1
)
)
)
)
)
(A119894minus1
Gref A119894minus2
Grefsdot sdot sdot AGref Gref
)
= O119894Cref119894
(7)
where A is the discrete state matrix and C is the discreteoutput matrix Therefore the Toeplitz matrix can be basedon to estimate the observability O
119894and reference-reserved
controllability matrix Cref119894
by applying the singular decom-position to it
Tref1|119894= USV119879 = (U
1U2) (
S1O
O O)(
V1198791
V1198792
) = U1S1V1198791 (8)
in which only the significant nonzero singular values S1are
reserved and those close to zeros due to noise influences areignored leading to
O119894= U1S121
Cref119894= S121
V1198791
(9)
Based on (9) the system matrix C can be constructed to bethe first 119897 rows of O
119894and Gref is the last 119903 columns of Cref
119894
Consequently the system matrix A can be found by usinganother shifted block Toeplitz matrix through
A = Sminus121
U1198791Tref2|119894+1
V1Sminus121
(10)
which is due to the relationship of Tref2|119894+1 = O
119894ACref119894 This
means that the system matrices A C in (1) can be recoveredusing the output covariance data matrices However in prac-tice the data length 119895 is limited and therefore the covariancesexpressed in (6) are just estimates This means that theseestimates may vary from measurements to measurementswhen data contains inevitable nonstationary contents whichwill result in uncertainties in identification results Moreoverwhen the SNR of measurements is low the identificationresults may not be convergent
In addition because of the influences of different noisesthe higher singular values in (8) are not zeros which makesit difficult to identify the system order 119899 Therefore it is oftennecessary to use a stabilization diagram to determine 119899 andcorresponding model parameters
Conventionally the stabilization diagram is constructedby the increments of system order 119899 at a fixed row numberHowever recent studies [10 14 15] show that the efficiencyand accuracy of identification also depend on the variationof the row number 119894 of the Hankel matrix and hence leadto an alternative stabilization diagram that is formed byconsecutive increments of the row number 119894 at a fixedorder 119899 and show more effectiveness compared with theconventional one However it needs to specify 119899 first whichis usually unknown for most applications To overcome thisshortage this study constructs the alternative stabilizationdiagram by varying the order 119899 simultaneously at eachincrement 119894 This then ensures that significant modes canbe selected automatically without the need to specify 119899 inadvance
23 Eigen Realization Algorithm with Data Correlation(ERADC) However in implementing Cov-SSI as the datalength 119895 is limited the covariances expressed in (5) arejust estimates It means that these estimates may vary frommeasurements to measurements Especially when data con-tains inevitable nonstationary effects and high noise contentsidentification results will have high uncertainties To over-come these shortages many researches have been made overyear Of particular interest are the ERA based approaches asthey can produce superior identification results with boththe conventional impulse response data [16] and the latestcorrelation data induced by white noise inputs [17]
As shown in [18] the correlation signal between tworesponses from white noise excitations is equivalent to theimpulse responses of a dynamic system It means that thecorrelation signal can be used directly for the time domainbased identification methods In [19 20] the correlationsignals were employed to construct the block Hankel matrixin implementing the standard ERA developed based onimpulse inputs rather than a white noise These show thatfrom the scheme of ERA based identification matrix in (5)
Shock and Vibration 5
can be viewed as the impulse responses that is the Markovparameters in ERA In this way Cov-SSI is the same as ERAand the improvements made on ERA can be applied to Cov-SSI
To reduce noise influences Juang et al [21] improve ERAby using correlation data of impulse responses and namedit as ERA with data correlation (ERADC) As shown inERADC the correlation data of the block Hankel matrixconstructed from impulse responses also consists of the infor-mation of system matrix It means that a further correlationof the correlation matrix of (5) can be calculated by (11) forsystem identifications
TT119902= T (119902)T (0)119879 isin R119897119894times119897119894 (11)
where the zero-lag correlation T(0) = Yref119901Yref119879119901
Accordingto this relationship and the way of constructing (5) a newblock Toeplitz matrix can be constructed from the furthercorrelation data and named as the further correlation matrixwhich can be expressed as
Uref1|119894(119902) = (
TT119902+1
TT119902+2sdot sdot sdot TT
119902+119887
TT119902+2
TT119902+3sdot sdot sdot TT
119902+119887minus1
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
TT119902+119886
TT119902+119886minus1sdot sdot sdot TT
119902+119886+119887
)
isin R119886119897119894times119887119897119894
(12)
As this block Toeplitz matrix also contains the information ofsystemmatrix in the format of (6) the SVDprocess expressedin (4) can be applied to it to estimate the system matrixA and subsequently calculate modal parameters using (4)However as the effect of more noise reduction and possiblenonstationary suppression due to the further correlationoperations this further correlation matrix based SSI will givemore accurate results which will be evaluated in the nextsection
24 Average Correlation Signal Based Covariance DrivenStochastic Subspace Identification (Acs-Cov-SSI) To reducethe deficiency of in implementing Cov-SSIref the correla-tion signals between sensors are taken as the inputMoreoverthe correlation signal can be considered as the free-vibrationdecay or the impulse responses of a dynamic system [12] andhas been used in various time domain based identificationmethods
The correlation signals are equivalent to the impulseresponses whose spectra are infinitely wide in theory Thusthey can be taken unsurprisingly to be the output of state-space equation corresponding to white noise excitationswhich meets the fundamental assumption when SSI schemeis developed Subsequently aHankel datamatrix as expressedin (5) can be constructed using the correlation signalsrather than the raw response signals In the same way theircovariance data matrixes of correlation signals also have theform of (7) Therefore a correlation signal based Cov-SSIrefcan be implemented for SSI
However the correlation signals estimated from one datarecord are often not sufficiently effective to suppress the noiseand nonstationary influences when their contents are veryhigh such as that of the vibration responses of the truck framepresented in Section 21 Usually there are multiple datarecords available which may be collected under similar ordifferent operating conditions Thus it is natural to combinethese records together for obtaining a more reliable identifi-cation result As correlation signals can be calculated using aspecified reference sensor for all different records the phaseinformation between different records can be preservedby these reference-based correlation signals and hence anaverage of the correlation signals can be performed betweendifferent data records The average will thus enhance thecontents with regular or periodic components by suppressingthe irregular random contents in different data recordsParticularly the component that associates with one of thesystem modes is often the more significant one Moreoverits autocorrelation signal of the reference sensor always has azero-phase in different data recordsTherefore the average ofthe autocorrelation signals from different records effectivelyimproves the SNR of the resultant correlation signals Simul-taneously as cross-correlation signals maintain the relativephase connections to the reference signals the average alsoenhances the desired regular components and suppresses thenoise contents Specifically the average correlation signalscan be obtained by the following key steps
(1) Obtain 119896 numbers of data segments from 119897 channelsmeasurements either by using multiple measurementrecords or by segregating a very long record into smallones
(2) Select a reference channel such as 119901 which mayhave better SNR through a spectrum analysis or ananalytical analysis to estimate which of the sensors isless influenced by interferences For instance as theengine and power trainmay causemore influences onthe sensors in the front of the frame one of the sensorswhich is at rear can be used as the reference
(3) Calculate the auto- and cross-correlation signals ofeach segment with 119873 samples for different channels119894 = 1 2 119897 when taking the channel 119901 as thereference channel Consider
119903119894119901(120591) =
1
119873 minus 119894
119873minus119902minus1
sum
119902=0
119910119894(119902 + 120591) 119910
119901(119902) (13)
which can be calculated using the fast Fourier trans-form (FFT) algorithm to improve overall identifica-tion efficiency
(4) Average the correlation signals from different seg-ments to obtain the average correlation signals forcorresponding channels
119903119894119901(120591) =
1
119896
119896
sum
119896=1
119903119894119901
119896(120591) (14)
6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
can be viewed as the impulse responses that is the Markovparameters in ERA In this way Cov-SSI is the same as ERAand the improvements made on ERA can be applied to Cov-SSI
To reduce noise influences Juang et al [21] improve ERAby using correlation data of impulse responses and namedit as ERA with data correlation (ERADC) As shown inERADC the correlation data of the block Hankel matrixconstructed from impulse responses also consists of the infor-mation of system matrix It means that a further correlationof the correlation matrix of (5) can be calculated by (11) forsystem identifications
TT119902= T (119902)T (0)119879 isin R119897119894times119897119894 (11)
where the zero-lag correlation T(0) = Yref119901Yref119879119901
Accordingto this relationship and the way of constructing (5) a newblock Toeplitz matrix can be constructed from the furthercorrelation data and named as the further correlation matrixwhich can be expressed as
Uref1|119894(119902) = (
TT119902+1
TT119902+2sdot sdot sdot TT
119902+119887
TT119902+2
TT119902+3sdot sdot sdot TT
119902+119887minus1
sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot sdot
TT119902+119886
TT119902+119886minus1sdot sdot sdot TT
119902+119886+119887
)
isin R119886119897119894times119887119897119894
(12)
As this block Toeplitz matrix also contains the information ofsystemmatrix in the format of (6) the SVDprocess expressedin (4) can be applied to it to estimate the system matrixA and subsequently calculate modal parameters using (4)However as the effect of more noise reduction and possiblenonstationary suppression due to the further correlationoperations this further correlation matrix based SSI will givemore accurate results which will be evaluated in the nextsection
24 Average Correlation Signal Based Covariance DrivenStochastic Subspace Identification (Acs-Cov-SSI) To reducethe deficiency of in implementing Cov-SSIref the correla-tion signals between sensors are taken as the inputMoreoverthe correlation signal can be considered as the free-vibrationdecay or the impulse responses of a dynamic system [12] andhas been used in various time domain based identificationmethods
The correlation signals are equivalent to the impulseresponses whose spectra are infinitely wide in theory Thusthey can be taken unsurprisingly to be the output of state-space equation corresponding to white noise excitationswhich meets the fundamental assumption when SSI schemeis developed Subsequently aHankel datamatrix as expressedin (5) can be constructed using the correlation signalsrather than the raw response signals In the same way theircovariance data matrixes of correlation signals also have theform of (7) Therefore a correlation signal based Cov-SSIrefcan be implemented for SSI
However the correlation signals estimated from one datarecord are often not sufficiently effective to suppress the noiseand nonstationary influences when their contents are veryhigh such as that of the vibration responses of the truck framepresented in Section 21 Usually there are multiple datarecords available which may be collected under similar ordifferent operating conditions Thus it is natural to combinethese records together for obtaining a more reliable identifi-cation result As correlation signals can be calculated using aspecified reference sensor for all different records the phaseinformation between different records can be preservedby these reference-based correlation signals and hence anaverage of the correlation signals can be performed betweendifferent data records The average will thus enhance thecontents with regular or periodic components by suppressingthe irregular random contents in different data recordsParticularly the component that associates with one of thesystem modes is often the more significant one Moreoverits autocorrelation signal of the reference sensor always has azero-phase in different data recordsTherefore the average ofthe autocorrelation signals from different records effectivelyimproves the SNR of the resultant correlation signals Simul-taneously as cross-correlation signals maintain the relativephase connections to the reference signals the average alsoenhances the desired regular components and suppresses thenoise contents Specifically the average correlation signalscan be obtained by the following key steps
(1) Obtain 119896 numbers of data segments from 119897 channelsmeasurements either by using multiple measurementrecords or by segregating a very long record into smallones
(2) Select a reference channel such as 119901 which mayhave better SNR through a spectrum analysis or ananalytical analysis to estimate which of the sensors isless influenced by interferences For instance as theengine and power trainmay causemore influences onthe sensors in the front of the frame one of the sensorswhich is at rear can be used as the reference
(3) Calculate the auto- and cross-correlation signals ofeach segment with 119873 samples for different channels119894 = 1 2 119897 when taking the channel 119901 as thereference channel Consider
119903119894119901(120591) =
1
119873 minus 119894
119873minus119902minus1
sum
119902=0
119910119894(119902 + 120591) 119910
119901(119902) (13)
which can be calculated using the fast Fourier trans-form (FFT) algorithm to improve overall identifica-tion efficiency
(4) Average the correlation signals from different seg-ments to obtain the average correlation signals forcorresponding channels
119903119894119901(120591) =
1
119896
119896
sum
119896=1
119903119894119901
119896(120591) (14)
6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
Table 1 Parameters in the FEMmodel
Model Elastic modulus (MPa) Poissonrsquos ratio Unit Value of unit (mm) CommentLongitudinal beams 21 times 105 03 Shell 63 30 Two symmetrical side beamsHorizontal beams 21 times 105 03 Shell 63 15 Five horizontal beamsLinking board 21 times 105 03 Shell 63 15 Four link boards for each horizontal beamJoints 21 times 105 03 Combine 14 16 Diameter values
It will show that using the correlation signal and its averagewill significantly improve the SNR of input data and result inmore accurate robust and efficient identification
3 Verification of the Average CorrelationSignal Based SSI
To verify the suggested method two offline tests wereconducted when the frame was at free status The first oneis a standard hammer test in which both inputs and outputsare used formodal identification by the commercial softwareThe second one is a random hammer test in which only theoutputs are used to determine the modal parameters by theproposed Acs-Cov-SSI method In addition FEM was alsoused to calculate themodes for further benchmarking the testresults
31 Modal Characteristics from a Standard Hammer TestDuring the standard hammer test both the input ham-mer force and the vibration responses at points shownin Figure 1(a) are recorded and the modal parameters aredetermined using the commercial software provided witha PolyLSCF method abbreviated from the multireferencepoint based least square method in the complex frequencydomainThe test needs to be performed particularly carefullyin order to reduce errors due to inadequate hammeringpoints hitting amplitudes and force windowing and usingan oversampling mechanism for logging the force signal TheHyperWorks software was used in the FEM in which theframe in Figure 1(a)wasmodelledwith 54503 units consistingof 27 basic components Table 1 depicts key parameters inFEM From the grid arrangement and necessary calculationparameters first ten vibration modes in the low frequencyrange below 100Hz are obtained by HyperWorks software
Figures 3 and 4 present the results for the measured andFEM predicted modes respectively It can be seen that boththe modal shapes and the frequency values for modes at1020Hz 2644Hz 3286Hz 3490Hz 5212Hz and 7591Hzfrom the measurement agree closely with corresponding pre-dictions at 912Hz 2545Hz 3400Hz 3585 and 7663Hzrespectively However because of inevitable errors in both themeasurement and calculation due to noise influences sensormounting uncertainties and the inaccuracy of modellingthe joints the modal shapes measured at 4071Hz 4659Hz7078Hz 8036Hz 8581Hz and 9559Hz cannot agree verywell with the corresponding predicted ones even thoughseveral of them show very close frequency values In additionthe differences between these two methods also indicatethat the FE analysis may not be very accurate because of
the inaccuracy in modelling the complicated joints Never-theless as most of frequency values are close to each otherbetween the measurement and prediction the results areacceptable as benchmarks for the proposed method
32 Modal Characteristics of a Random Hammer Test withAcs-Cov-SSI During the random hammer test four ham-mers with rubber heads hit the frame at points 3 4 9 and 10simultaneously but with a randommanner as the continuoushits were achieved by four different people running thehammer with different forces and different rates In this waythe excitations produced are similar to the situation whenthe vehicle travels on unpaved roads During the continuousimpacts the 12 acceleration responses are recorded at 1000Hzfor 10 times with each lasting for 100 seconds in order toachieve sufficient averages for obtaining good correlationsignals in implementing the Acs-Cov-SSI
As shown in Figure 5 the short segments of accelerationresponses at sensors 3 4 5 and 6 exhibit clear nonstationaryphenomena due to the impacts However their noise contentsare relatively low compared with the signals in Figure 1 astheir spectra show distinctive peaks due to modal responsesTo suppress the nonstationary and noisy effects each datarecord is divided into 10 equal segments after applying alow pass filtering with a 100Hz cutoff frequency Thus theaverages for correlation signal calculation can be up to 100times allowing sufficient noise suppression
Figure 6 shows the results from Acs-Cov-SSI the resultsfrom Acs-Cov-SSI was obtained when the length of correla-tion signal is 1024 points covering at least two periods of thelowest modes From the stable frequency centers shown inthe alternative stabilization diagram in Figure 6(a) it can beobserved that more than 12 modes can be extracted based onthe stable modes across the row increment Firstly the modesat the potential frequency bin of plusmn05Hz are selected to becandidates when the occurrence rate across the last 30 rowsis more than 50 Then these candidates are further refinedby keeping only those of their modal assurance criterion(MAC) [22] and damping ratio values within 01 and plusmn01respectively Finally themean values of frequencies dampingratios and modal shapes from the selected modes are takenas the identification results
Figure 6(b) presents the results obtained from the ran-dom hammer test By comparing the results with that ofFigure 3 obtained by the standard hammer tests it can befound that apart from the two rigid vibration modes at2363Hz and 3282Hz the remaining 12modes are consistentwith those of the standard hammer test in that their modalshapes and frequency values are very close to each other asdetailed in Table 2 However the damping values obtained
Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
Table 2 Comparison of modal parameters between standard hammer test and random hammer test
Modal number 1 2 3 4 5 6 7 8 9 10 11 12Frequency (Hz) 046 021 175 106 069 081 090 084 025 074 068 066Damping ratio () minus050 minus076 minus033 002 minus068 003 minus104 039 minus011 minus027 011 minus037MAC 001 001 017 001 002 010 021 015 011 020 002 006
1020Hz 195 2644Hz 078
3286Hz 156 3490Hz 118
4071Hz 147 4659Hz 153
5212Hz 066 7078Hz 153
7591Hz 022 8036Hz 044
8581Hz 116 9559Hz 012
Figure 3 Modal identification results by the standard hammer test using the commercial software
8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
2617E+00
2328E+00
2039E+00
1750E+00
1461E+00
1172E+00
8831Eminus01
5942Eminus01
3053Eminus01
1635Eminus02
2367E+00
2104E+00
1841E+00
1579E+00
1316E+00
1054E+00
7913Eminus01
5288Eminus01
2662Eminus01
3701Eminus03
912Hz 2545Hz3337E+00
2967E+00
2597E+00
2227E+00
1857E+00
1487E+00
1117E+00
7465Eminus01
3763Eminus01
6176Eminus03
3400Hz 3585Hz
3893E+00
3489E+00
3085E+00
2681E+00
2277E+00
1873E+00
1469E+00
1065E+00
6605Eminus01
2564Eminus01
5579E+00
4959E+00
4340E+00
3720E+00
3101E+00
2481E+00
1862E+00
1242E+00
6225Eminus01
2959Eminus03
4593Hz4049E+00
3599E+00
3149E+00
2699E+00
2250E+00
1800E+00
1350E+00
9002Eminus01
4504Eminus01
5517Eminus04
5030Hz
3045E+00
2715E+00
2385E+00
2055E+00
1725E+00
1395E+00
7345Eminus01
4044Eminus01
7438Eminus02
5194Hz
3215E+00
2858E+00
2502E+00
2145E+00
1788E+00
1431E+00
1074E+00
7176Eminus01
3608Eminus01
4007Eminus03
7663Hz
9307Hz
4567E+00
4060E+00
3553E+00
3046E+00
2539E+00
2032E+00
1525E+00
1018E+00
5115Eminus01
4600Eminus03
Not identified
1065E+00
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)Ei
gen
mod
e
No
resu
lt(Mag
)
Eige
n m
ode
No
resu
lt(Mag
)
Figure 4 Modal parameters from FEM
Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
2 3 4
0
50
100 Sensor 3
Time (s)
0 50 100
Sensor 3
Frequency (Hz)
2 3 4
0
50
100 Sensor 4
Time (s)
0 50 100
Sensor 4
Frequency (Hz)
2 3 4
0
50
100 Sensor 10
Time (s)
0 50 100
Sensor 10
Frequency (Hz)
2 3 4
0
50
100 Sensor 11
Time (s)
0 50 100
Sensor 11
Frequency (Hz)
minus50
minus100
minus50
minus100
minus50
minus100
minus50
minus100
Acc
(ms2)
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
102
100
10minus2
10minus4
Acc
(ms2H
z)
Figure 5 Examples of acceleration signals from the random hammer test
from Acs-Cov-SSI are slightly higher This difference maystem from the deficiency of damping ratio estimation withSSI based methods [15] Nevertheless the difference canbe acceptable because the variation of damping ratio val-ues is agreed upon between the two methods Thereforethe test proves that the proposed method can achieve thesame accuracy as that of the commercial one Howeverthe proposed method uses output-only data and with littlerestriction to excitations It means that it can be easily imple-mented and hence particularly suitable for online identifica-tion
Moreover a comparison of stabilization diagrams ismadebetween different averages applied to the correlation signalswhen the raw signals are added by more than 30 randomnoise From the stabilization diagrams in Figure 7 it canbe seen that the spurious modes due to noise become lesswith larger averages resulting in a clearer diagram In themeantime the potential modes at 51Hz and 65Hz becomemore identifiable This shows the high effectiveness of theaverage of correlation functions
4 Characterization of the Modal Responses toDifferent Roads
The vehicle is designed to operate mainly in different devel-opment sites where the road condition is usually unpavedwith very poor condition Figure 8(b) shows an example ofsuch roads on which current tests are based The road hasvery oscillating profiles with many large valleys and sharpsummits Obviously these severe road conditions will causesevere dynamic loads and high vibrations to the frame andalso cause difficulties to handling the vehicle To assess theseeffects two road tests were carried out on both the roadswith speed bumps and the roads without any pavementsrespectively as shown in Figures 8(a) and 8(b) The first oneis to evaluate the frame dynamic responses when the vehiclepasses successive bumps which induce extreme excitationsDuring this test the vehicle accelerated to about 20 kmh firstThen its engine was shut down to let the vehicle slide acrossa number of consecutive bumps As the bump produces highimpacts and there are no engine excitations the data will havegood SNR for identification
10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and Vibration
10 20 30 40 50 60 70 8050
60
70
80
Row
num
ber
Frequency (Hz)0 90 100
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
00
20
40
60
81
minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1 minus1 minus1 minus1
2363Hz 6117 3282Hz 8192 9732Hz 2442 2623Hz 1434
311Hz 2011 3481Hz 06947 4003Hz 2279 4578Hz 1494
5118Hz 1803 7181Hz 1025 7567Hz 03361 7962Hz 07111
12 2 4
6 810 120
1
12 2 4
6 8 10120
1minus1minus1
8619Hz 1394 9492Hz 04934
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 6 Modal identification results based on a random hammer test by Acs-Cov-SSI (a) Stabilization diagram and (b) identified modes
0 10 20 30 40 50 60 70 80 90 10050
60
70
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
Frequency (Hz)0 10 20 30 40 50 60 70 80 90 100
50
60
70
80
Row
num
ber 0
minus50
PSD
((m
s2)2
Hz)
(b)
Figure 7 Comparison of stabilization diagrams for different averages (a) 100 averages and (b) 140 averages
Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 11
(a) (b)
Figure 8 Illustration of the test road conditions (a) Bumped road and (b) unpaved road
During the unpaved road test the vehicle travelled atabout 20 kmh for both loaded and unloaded cases which aretypical operating modes for such vehicles as they often repeatthe same trips for transporting materials in-site
For each test case more than 10 data records with asampling rate of 1000Hz were obtained Each record lastsabout 6minutes or 360000 samples yielding a sufficient datalength of 1800 for correlation signal calculation when segre-gating each record into 20 short segments Consequently thenumber of averages can bemore than 100 in order to suppressnoise influence effectively formore accuratemode extraction
41 Modal Characteristics on Bumped Road without LoadFigure 9 shows the alternative stabilization diagram andcorresponding identification results for the case when thevehicle travelled on the bumped road without load Asexpected a large number of modes can be identified becauseof the wide frequency excitations due to the large and sharpimpacts induced by travelling across bumps However thesemodes behave very differently from that of the free framepresented in Figure 6
Only one rigid mode at 3772Hz is shown up as theexcitations between two sides are nearly the same when thevehicle crosses the bumps forward Because the engine andloading system are mounted in the front of the frame themode exhibits a high pitch motion at the rear part as thecontainer is not loaded and can be activated by impacts ofthe bump
For the modes from the frame responses the smoothshapes for the first twist mode and bending mode identifiedpreviously are not shown because of the constraints of dif-ferent subsystem and parts installed onto the frame Insteadsix modes identified in the frequency range from 7135Hzto 4087Hz in which the spectrum amplitudes are highexhibit local twist or bending profiles However accordingto the modal shapes it can be deduced that high relativedeformations of the frame occur at sensor positions of 3 45 and 6 It indicates that the frame is subject to high dynamicloads at these positions and the stiffness at this part of theframe may need to be improved In addition it is worthnoting that the modes at 7135Hz and 1104Hz may affect
the handling stability as their frequency values are very lowand close to the resonances of the tyres
For the modes at frequencies higher than 45Hz there arealso little similarities with that of free frame status Althoughthe mode at 5116Hz shows close frequency and dampingvalues to that of 5118Hz the two shapes are different becauseof the effect of additional joints on the frame Moreoverthe modes in this frequency range are associated with lowervibration energy so they may induce less dynamic loadsHowever their vibrations and associated noise can bringproblems to ride comforts and environmental pollution
From the above discussion it can be concluded thattravelling across bumps allows a good online identificationof the modes associating with the frame The result obtainedonline is very different from that obtained offline In generalthe online results show more modes below 45Hz and modalfrequencies are about 2Hz lower compared with the offlineresults However themodal shapes are very different betweenthe twomethods Moreover the online results reflect the truedynamics of the frame and are the final references to assessthe performance of the frame and the vehicle Fortunately thesuggestedmethod in the study allows the online identificationto be implemented without any difficulties
42 Modal Characteristics on Unpaved Roads without LoadWhen the vehicle travels on unpaved roads with layouts asillustrated in Figure 8(b) the road excitations are relativelymore random between different wheels Therefore the threecommon rigid modes pitch rolling and bounce of the vehi-cle are more likely to be excited As shown in Figure 10(b)the first three modes at 1057Hz 3201Hz and 3844Hz justcorrespond to these motions respectively
As the unpaved roads cause smaller excitations lesssignificant modes can be excited and more spurious modesdue to noise are shown in the stabilization diagram ofFigure 10(a) However it is still not difficult to extract themodes at 7307Hz 1115Hz 5411 Hz and 6393Hz whichshow similar frequency and damping values to that of thebumped roads In addition their modal shapes are closeto each other The modes at 3771Hz and 5796Hz maycorrespond to those at 4087Hz and 6388Hz respectively
12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
1
2 24 6 8 10
1201
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
12 2
4 6 8 10120
1
12 2 4 6 8
10 1201
12 2 4 6 8
10 1201
12 2
4 6 8 10120
1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
minus1 minus1 minus1 minus1
3772 Hz 1101 7135 Hz 9278 1104 Hz 1233 241 Hz 4642
2963 Hz 4089 3311 Hz 3712 4087 Hz 2792 5116 Hz 1747
5397 Hz 3391 6388 Hz 09667 8995 Hz 1974 9894 Hz 1163
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 9 Modal characteristics of the frame on the bumped road without load (a) Stabilization diagram and (b) identified modes
as their modal shapes are very similar However the noiseinfluences account for such differences in their frequency anddamping values
Nevertheless these modal features have confirmed fun-damental mode characteristics and their responses to roadconditions which in turn also verified again the proposedmethod Moreover all these modal shapes can indicatethe high relative deformation positions and hence find theportion with high dynamic loads which provides referencesfor structural improvement
43 Modal Characteristics on Unpaved Roads with LoadWhen the vehicle is loaded it travels more smoothly whichleads to less noise influences and hence a clearer stabilizationdiagram and more identifiable modes as shown in Figure 11
However the dynamic behaviour of the vehicle sys-tem including the frame changes significantly because ofthe loading mass which can be partly associated with theframe and alter the inherent modes As shown in Figure 11
the identified modes for the loaded vehicle show significantdifferences from those of unloaded ones even though theroad conditions are similar A clear effect of the associatedmass is the change of the bounce mode as it can be seenin Figure 11(b) the rigid bounce occurs more severely at2004Hz which is nearly 2Hz lower compared with that of3844Hz for the unloaded case In addition the dampingvalue is significantly higher due to the nonlinear effect of thesuspension system However the modes with more rollingat 3114Hz and 3865Hz are similar to the unloaded case interms of the frequency and damping values
Correspondingly the effect of the associated mass alsomakes the structural responses of the frame occur at lowerfrequency values Particularly more modes in the lower fre-quency range start from about 5834Hz to 40Hz Moreoverthe modal shapes of these modes also show high relativedeformation around sensor positions 3 4 5 and 6 indicatingthat this portion of the frame is subjected to high dynamicloads similar to the unloaded cases Therefore the structure
Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 13
0 10 20 30 40 50 60 70 80 90 100
60
80
Row
num
ber
Frequency (Hz)
0
minus50
PSD
((m
s2)2
Hz)
(a)
1
2 24 6
810 120
1
12 2
4 68
10 1201
12 2
4 68
10 1201
12 2
4 68
10 1201
1
2 24 6
810 120
1
1
2 24 6
810 120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
1
2 24 6
8 10120
1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
minus1
1057Hz 6622 3201Hz 1259 3844Hz 1824
7307Hz 1929 1115Hz 4715 3771Hz 2241
5411Hz 07006 5796Hz 2586 6393Hz 1986
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 10 Modal characteristics of the vehicle frame on unpaved road at 20 kmh without load (a) Stabilization diagram and (b) identifiedmodes
of the frame should be further improved to enhance thestiffness in the parts However the mode at 11Hz is notshown indicating that theremay be less interaction to the tyresystems and hence the brake performance can be maintainedunder loaded conditions
In the higher frequency range the modal shapes showcombined twists and bends However as their correspondingspectral amplitudes are very low they may not cause signifi-cant dynamic loads to the frame but add to ride discomfortParticularly all these modes showmore oscillatory profiles inthe front of the frame which can pass to the cab system easily
5 Conclusions
In order to assess the dynamic performance of the frame in aheavy-duty dump truck an online modal analysis is carriedout using an improved SSI method As the frame is subjected
to high random excitations under the designed operatingroads the vibration responses exhibit and contain highlynonstationary and strong noise influences These challengethe conventional SSI methods such as the most promisedreference-based covariance driven stochastic subspace iden-tification (Cov-SSIref) to produce a convergent result How-ever the proposed average correlation signals based Cov-SSIref can suppress these influences effectively and allow anefficient and reliable modal parameter identification
By offline verification the proposed method can produceidentification results that are consistent with those from thecommercial software using both the input and output mea-surements Moreover as the proposedmethod is more robustto noise influence less demand for excitation conditions andonly relies on output responses it can be easily realized forthe online mode identification of the truck frame when it isintegratedwith full subsystems andwhen the vehicle operatesunder real operations
14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

14 Shock and Vibration
0 10 20 30 40 50 60 70 80 90 100
60
80
Frequency (Hz)
Row
num
ber
0
minus50
PSD
((m
s2)2
Hz)
(a)
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
1051Hz 1788 2004Hz 5118 3114Hz 6157 3865Hz 2098
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1 minus1
5834Hz 1425 1805Hz 7579 7678Hz 2069 7996Hz 1094
12 2 4
68 10
1201
12 2 4
68 10
1201
12 2 4
68 10
1201
minus1 minus1 minus1
8301Hz 241 8997Hz 1037 9492Hz 1087
00
20
40
60
81
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1 0
02
04
06
081
minus02
minus04
minus06
minus08 minus1
(b)
Figure 11 Modal characteristics of the vehicle frame on unpaved roads at 20 kmh with load (a) Stabilization diagram and (b) identifiedmodes
When the vehicle crosses successive speed bumps theproposed method results in more identifiable modes becauseof the extreme excitations induced by the bumps Howeverthe mode number is still three less and modal parametersare significantly different compared with the offline resultsThe modal shapes from the offline results do not give clearindication of the part with high relative deformation On theother hand the online results clearly show that high relativedeformation happens at sensor positions 3 4 5 and 6 wherethe frame is less rigged
When it operates on the unpaved roads which are typicalcases for various building and mining sites the identifiablemodes are less because of the smaller excitations on theroads Without load the frame shows about six modes butthey can also indicate the high deformation position at thehigher speed due to the higher excitations However whenthe vehicle is loaded identifiable modes all shift to lowerfrequencies and the weak position can be also indicated by
the modal shapes In addition more modes are identifiablebecause of less noise effect when the vehicle operates rel-atively smoother under the loaded condition In additionthe modes at 7135Hz and 1104Hz may affect the handlingstability as their frequency values are close to the resonancesof the tyres
Based on this successful online modal analysis theperformance of the proposed method has been provedMoreover it produces a realistic assessment of the dynamiccharacteristics of the frame and gives accurate locationswhere the frame needs to be improved further with higherrigidness
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 15
Acknowledgments
This research is supported by the Graduate Excellent Inno-vation Project of Shanxi Province of China with Grant no2012-302 and the High Technology Industrialization Projectof Shanxi Province of China with Grant no 2011-2368
References
[1] CMi Z GuQ Yang andDNie ldquoFrame fatigue life assessmentof a mining dump truck based on finite element method andmultibody dynamic analysisrdquo Engineering Failure Analysis vol23 pp 18ndash26 2012
[2] I K Yilmazcoban and Y Kahraman ldquoTruck chassis structuralthickness optimization with the help of finite element tech-niquerdquoThe Online Journal of Science and Technology vol 1 no3 pp 23ndash30 2011
[3] Z Chen T Wang and Z Zhao ldquoThe lightweight design of adump truck frame based on dynamic responsesrdquo in Proceed-ings of the 18th International Conference on Automation andComputing Paper no 13072215 pp 1ndash5 IEEE Manchester UKSeptember 2012
[4] B Peeters and G De Roeck ldquoStochastic system identificationfor operational modal analysis a reviewrdquo Journal of DynamicSystems Measurement and Control vol 123 no 4 pp 659ndash6672001
[5] C E Ventura and M T Katherine ldquoDynamic properties of a32-storey building determined from different analysis methodsof ambient vibration test datardquo in Proceedings of the 2ndInternational Operational Modal Analysis Conference pp 557ndash564 Copenhagen Denmark May 2007
[6] F Magalhaes A Cunha and E Caetano ldquoOnline automaticidentification of the modal parameters of a long span archbridgerdquo Mechanical Systems and Signal Processing vol 23 no2 pp 316ndash329 2009
[7] B Peeters and G De Roeck ldquoReference-based stochastic sub-space identification for output-onlymodal analysisrdquoMechanicalSystems and Signal Processing vol 13 no 6 pp 855ndash878 1999
[8] E Parloo P Verboven P Guillaume and M Van Over-meire ldquoSensitivity-based operational mode shape normalisa-tionrdquo Mechanical Systems and Signal Processing vol 16 no 5pp 757ndash767 2002
[9] E Reynders and G D Roeck ldquoReference-based combineddeterministic-stochastic subspace identification for experimen-tal and operational modal analysisrdquo Mechanical Systems andSignal Processing vol 22 no 3 pp 617ndash637 2008
[10] G Dong J Chen and N Zhang ldquoInvestigation into on-roadvehicle parameter identification based on subspace methodsrdquoJournal of Sound and Vibration vol 333 no 24 pp 6760ndash67792014
[11] X-Q Guan M Yuan and J-W Zhang ldquoApplication ofsubspace-based method in vehicle handling dynamic modelidentification and properties estimationrdquo International Journalof Vehicle Design vol 56 no 1ndash4 pp 125ndash145 2011
[12] D-Y Chiang C-S Lin and F-H Su ldquoIdentification of modalparameters from ambient vibration data by modified eigensys-tem realization algorithmrdquo Journal of Aeronautics Astronauticsand Aviation Series A vol 42 no 2 pp 79ndash86 2010
[13] M Chang and S N Pakzad ldquoModified natural excitation tech-nique for stochastic modal identificationrdquo Journal of StructuralEngineering vol 139 no 10 pp 1753ndash1762 2013
[14] Y Zhang Z Zhang X Xu and H Hua ldquoModal parameteridentification using response data onlyrdquo Journal of Sound andVibration vol 282 no 1-2 pp 367ndash380 2005
[15] E Reynders R Pintelon andG de Roeck ldquoUncertainty boundson modal parameters obtained from stochastic subspace iden-tificationrdquoMechanical Systems and Signal Processing vol 22 no4 pp 948ndash969 2008
[16] J-S Lew J-N Juang and R W Longman ldquoComparison ofseveral system identification methods for flexible structuresrdquoJournal of Sound andVibration vol 167 no 3 pp 461ndash480 1993
[17] D-Y Chiang and C-S Lin ldquoIdentification ofmodal parametersfrom ambient vibration data using eigensystem realizationalgorithm with correlation techniquerdquo Journal of MechanicalScience and Technology vol 24 no 12 pp 2377ndash2382 2010
[18] C R Farrar and G H James III ldquoSystem identification fromambient vibration measurements on a bridgerdquo Journal of Soundand Vibration vol 205 no 1 pp 1ndash18 1997
[19] B A Pridham and J C Wilson ldquoA study of damping errorsin correlation-driven stochastic realizations using short datasetsrdquo Probabilistic Engineering Mechanics vol 18 no 1 pp 61ndash77 2003
[20] D M Siringoringo and Y Fujino ldquoSystem identification of sus-pension bridge from ambient vibration responserdquo EngineeringStructures vol 30 no 2 pp 462ndash477 2008
[21] J-N Juang J E Cooper and J R Wright ldquoEigensystemRealization Algorithm using Data Correlations (ERADC) formodal parameter identificationrdquo Control-Theory and AdvancedTechnology vol 4 no 1 pp 5ndash14 1988
[22] R J Allemang ldquoThe modal assurance criterionmdashtwenty yearsof use and abuserdquo Sound and Vibration vol 37 no 8 pp 14ndash212003
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of