-
Research ArticleBlock Hybrid Collocation Method with Application
toFourth Order Differential Equations
Lee Ken Yap1,2 and Fudziah Ismail2
1Department of Mathematical and Actuarial Sciences, Universiti
Tunku Abdul Rahman, Setapak, 53300 Kuala Lumpur,
Malaysia2Department of Mathematics and Institute for Mathematical
Research, Universiti Putra Malaysia (UPM),43400 Serdang, Selangor,
Malaysia
Correspondence should be addressed to Lee Ken Yap;
[email protected]
Received 10 July 2014; Revised 22 November 2014; Accepted 25
November 2014
Academic Editor: Maŕıa Isabel Herreros
Copyright © 2015 L. K. Yap and F. Ismail. This is an open access
article distributed under the Creative Commons AttributionLicense,
which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properlycited.
The block hybrid collocation method with three off-step points
is proposed for the direct solution of fourth order
ordinarydifferential equations. The interpolation and collocation
techniques are applied on basic polynomial to generate the main
andadditional methods. These methods are implemented in block form
to obtain the approximation at seven points
simultaneously.Numerical experiments are conducted to illustrate
the efficiency of themethod.Themethod is also applied to solve the
fourth orderproblem from ship dynamics.
1. Introduction
Fourth order ordinary differential equations (ODEs) arisein
several fields such as fluid dynamics (see [1]), beamtheory (see
[2, 3]), electric circuits (see [4]), ship dynamics(see [5–7]), and
neural networks (see [8]). Therefore, manytheoretical andnumerical
studies dealingwith such equationshave appeared in the
literature.
Here, we consider general fourth order ordinary differen-tial
equations:
𝑦(4)
= 𝑓 (𝑡, 𝑦, 𝑦, 𝑦, 𝑦) (1)
with the initial conditions𝑦 (𝑎) = 𝑦0, 𝑦
(𝑎) = 𝑦
0,
𝑦(𝑎) = 𝑦
0 , 𝑦
(𝑎) = 𝑦
0 , 𝑡 ∈ [𝑎, 𝑏] .
(2)
Conventionally, fourth order problems (1) are reduced tosystem
of first order ODEs and solved with the methodsavailable in the
literature. Many investigators [2, 9, 10]remarked the drawback of
this approach as it requiresheavier computational work and longer
execution time.Thus,the direct approach on higher order ODEs has
attractedconsiderable attention.
Recent developments have led to the implementation ofcollocation
method for the direct solution of fourth orderODEs (1). Awoyemi [9]
proposed a multiderivative colloca-tion method to obtain the
approximation of 𝑦 at 𝑡𝑛+4.Moreover, Kayode [11, 12] developed
collocation methods forthe approximation of 𝑦 at 𝑡𝑛+5 with the
predictor of ordersfive and six, respectively. These schemes [9,
11, 12] are imple-mented in predictor-corrector mode with the
employmentof Taylor series expansions for the computation of
startingvalues. Jator [2] remarked that the implementation of
theseschemes is more costly since the subroutines for
incorporat-ing the starting values lead to lengthy computational
time.Thus, some attempts have been made on the
self-startingcollocation method which eliminates the requirement
ofeither predictors or starting values from other methods. Jator[2]
derived a collocation multistep method and used it togenerate a new
self-starting finite difference method. On theother hand, Olabode
and Alabi [13] developed a self-startingdirect block method for the
approximation of 𝑦 at 𝑡𝑛+𝑗, 𝑗 =1, 2, 3, 4.
Here, we are going to derive a block hybrid collocationmethod
for the direct solution of general fourth order ODEs(1). The method
is extended from the line proposed by Jator[14] and Yap et al.
[15]. We apply the interpolation and
Hindawi Publishing CorporationMathematical Problems in
EngineeringVolume 2015, Article ID 561489, 6
pageshttp://dx.doi.org/10.1155/2015/561489
-
2 Mathematical Problems in Engineering
collocation technique on basic polynomials to derive themain and
additional methods which are combined and usedas block hybrid
collocation method. This method generatesthe approximation of 𝑦 at
four main points and three off-steppoints concurrently.
2. Derivation of Block HybridCollocation Methods
The hybrid collocation method that generates the approxi-mations
to the general fourth order ODEs (1) is defined asfollows:
𝑘
∑
𝑗=0
𝛼𝑗𝑦𝑛+𝑗 +
3
∑
𝑗=1
𝛼]𝑗𝑦𝑛+]𝑗
= ℎ4(
𝑘
∑
𝑗=0
𝛽𝑗𝑓𝑛+𝑗 +
3
∑
𝑗=1
𝛽]𝑗𝑓𝑛+]𝑗) .
(3)
We approximate the solution by considering the
interpolatingfunction
𝑌 (𝑡) =
𝑟+𝑠−1
∑
𝑗=0
𝜙𝑗𝑡𝑗, (4)
where 𝑡 ∈ [𝑎, 𝑏], 𝜙𝑗 are unknown coefficients to be deter-mined,
𝑟 is the number of interpolations for 4 ≤ 𝑟 ≤ 𝑘, and𝑠 is the number
of distinct collocation points with 𝑠 > 0.The continuous
approximation is constructed by imposingthe conditions as
follows:
𝑌 (𝑡𝑛+𝑗) = 𝑦𝑛+𝑗, 𝑗 = 0, 1, 2, . . . , 𝑟 − 1, (5)
𝑌(4)
(𝑡𝑛+𝜇) = 𝑓𝑛+𝜇, 𝜇 = {𝑗, ]1, ]2, ]3} , 𝑗 = 0, 1, 2, . . . ,
𝑘,(6)
where ]1, ]2, and ]3 are not integers. By considering 𝑟 = 4 and𝑠
= 8, we interpolate (5) at the points 𝑡𝑛, 𝑡𝑛+1, 𝑡𝑛+2, and 𝑡𝑛+3and
collocate (6) at the points 𝑡𝑛, 𝑡𝑛+1/2, 𝑡𝑛+1, 𝑡𝑛+3/2, 𝑡𝑛+2,
𝑡𝑛+5/2,𝑡𝑛+3, and 𝑡𝑛+4.This leads to a systemof twelve
equationswhichis solved byMathematica.The values of𝜙𝑗 are
substituted into(4) to develop the multistep method:
𝑌 (𝑡) =
𝑘
∑
𝑗=0
𝛼𝑗𝑦𝑛+𝑗 + ℎ4(
𝑘
∑
𝑗=0
𝛽𝑗𝑓𝑛+𝑗 +
3
∑
𝑗=1
𝛽]𝑗𝑓𝑛+]𝑗) , (7)
where 𝛼𝑗, 𝛽𝑗, and 𝛽]𝑗 are constant coefficients. Hence, theblock
hybrid collocation method can be derived as follows.
Main Method. Consider the following
𝑦𝑛+4 = 4𝑦𝑛+3 − 6𝑦𝑛+2 + 4𝑦𝑛+1 − 𝑦𝑛 +ℎ4
15120
× (19𝑓𝑛 + 1804𝑓𝑛+1 + 2560𝑓𝑛+3/2 + 6354𝑓𝑛+2
+ 2560𝑓𝑛+5/2 + 1804𝑓𝑛+3 + 19𝑓𝑛+4) .
(8)
Additional Method. Consider the following
𝑦𝑛+1/2 =1
16𝑦𝑛+3 −
5
16𝑦𝑛+2 +
15
16𝑦𝑛+1 +
5
16𝑦𝑛 +
ℎ4
7741440
× (75𝑓𝑛 − 25032𝑓𝑛+1/2 − 122530𝑓𝑛+1
− 107760𝑓𝑛+3/2 − 43080𝑓𝑛+2 − 3880𝑓𝑛+5/2
− 198𝑓𝑛+3 + 5𝑓𝑛+4) ,
𝑦𝑛+3/2 = −1
16𝑦𝑛+3 +
9
16𝑦𝑛+2 +
9
16𝑦𝑛+1 −
1
16𝑦𝑛 +
ℎ4
430080
× (𝑓𝑛 + 260𝑓𝑛+1/2 + 2311𝑓𝑛+1 + 4936𝑓𝑛+3/2
+ 2311𝑓𝑛+2 + 260𝑓𝑛+5/2 + 𝑓𝑛+3) ,
𝑦𝑛+5/2 =5
16𝑦𝑛+3 +
15
16𝑦𝑛+2 −
5
16𝑦𝑛+1 +
1
16𝑦𝑛 −
ℎ4
7741440
× (23𝑓𝑛 + 4680𝑓𝑛+1/2 + 41330𝑓𝑛+1
+ 110000𝑓𝑛+3/2 + 120780𝑓𝑛+2 + 25832𝑓𝑛+5/2
− 250𝑓𝑛+3 + 5𝑓𝑛+4) .
(9)
Thegeneral fourth order differential equations involve thefirst,
second, and third derivatives. In order to generate theformula for
the derivatives, the values of 𝜙𝑗 are substitutedinto
𝑌(𝑡) =
𝑟+𝑠−1
∑
𝑗=1
𝑗𝜙𝑗𝑡𝑗−1
,
𝑌(𝑡) =
𝑟+𝑠−1
∑
𝑗=2
𝑗 (𝑗 − 1) 𝜙𝑗𝑡𝑗−2
,
𝑌
(𝑡) =
𝑟+𝑠−1
∑
𝑗=3
𝑗 (𝑗 − 1) (𝑗 − 2) 𝜙𝑗𝑡𝑗−3
.
(10)
This is obtained by imposing that
𝑌(𝑡) =
1
ℎ(
𝑘
∑
𝑗=0
𝛼
𝑗𝑦𝑛+𝑗 + ℎ4
× (
𝑘
∑
𝑗=0
𝛽
𝑗𝑓𝑛+𝑗 +
3
∑
𝑗=1
𝛽
]𝑗𝑓𝑛+]𝑗)) ,
(11)
𝑌(𝑡) =
1
ℎ2(
𝑘
∑
𝑗=0
𝛼
𝑗 𝑦𝑛+𝑗 + ℎ4
× (
𝑘
∑
𝑗=0
𝛽
𝑗 𝑓𝑛+𝑗 +
3
∑
𝑗=1
𝛽
]𝑗𝑓𝑛+]𝑗)) ,
(12)
-
Mathematical Problems in Engineering 3
Table 1: Coefficients 𝛼𝑖 and 𝛽𝑖 for the method (11) evaluated at
𝑡𝑛+𝑖/2 for 𝑖 = 0, 1, . . . , 6 and 𝑡𝑛+4.
𝑡 𝑦𝑛 𝑦𝑛+1 𝑦𝑛+2 𝑦𝑛+3 𝑓𝑛 𝑓𝑛+1/2 𝑓𝑛+1 𝑓𝑛+3/2 𝑓𝑛+2 𝑓𝑛+5/2 𝑓𝑛+3
𝑓𝑛+4
𝑡𝑛 −11
63 −
3
2
1
3−
3397
3326400−
146
3465−
16201
166320−
116
1485−
3089
110880−
26
7425
1
23760−
1
665280
𝑡𝑛+1/2 −23
24
7
8
1
8−
1
24
7
12165120
114727
13305600
636767
31933440
2461
295680
28903
6082560−
127
1995840
179
1900800−
593
255467520
𝑡𝑛+1 −1
3−1
21 −
1
6
127
9979200
113
34650
13613
498960
5827
155925
503
36960
569
311850−
71
2494800
1
1425600
𝑡𝑛+3/2
1
24−9
8
9
8−
1
24−
197
17031168−
13
42240−
4231
1064448−
409
1900800
4079
946176
41
266112
481
10644480−
409
425779200
𝑡𝑛+2
1
6−1
1
2
1
3
13
3326400−
89
51975−
6913
498960−
214
5775−
9157
332640−
491
155925−
31
831600
1
1425600
𝑡𝑛+5/2
1
24−1
8−7
8
23
24−
2359
182476800−
13
42240−
17971
4561920−
74749
7983360−
271477
14192640−
179503
19958400
23
285120−
593
255467520
𝑡𝑛+3 −1
3
3
2−3
11
6
1
95040
113
34650
4721
166320
23
297
10859
110880
871
20790
893
831600−
1
665280
𝑡𝑛+4 −11
67 −
19
2
13
3
2159
285120−
146
3465
36541
99792
2956
155925
3697
3168
2918
31185
33047
71280
85741
9979200
Table 2: Coefficients 𝛼𝑖 and 𝛽𝑖 for the method (12) evaluated at
𝑡𝑛+𝑖/2 for 𝑖 = 0, 1, . . . , 6 and 𝑡𝑛+4.
𝑡 𝑦𝑛 𝑦𝑛+1 𝑦𝑛+2 𝑦𝑛+3 𝑓𝑛 𝑓𝑛+1/2 𝑓𝑛+1 𝑓𝑛+3/2 𝑓𝑛+2 𝑓𝑛+5/2 𝑓𝑛+3
𝑓𝑛+4
𝑡𝑛 2 −5 4 −11597
100800
169
675
4439
15120
446
1575
1601
30240
37
1575−
71
25200
23
302400
𝑡𝑛+1/2
3
2−7
2
5
2−1
2−
1973
3225600
107
19200
1933
15120
65911
604800
14927
322560
437
134400
439
1209600−
13
1382400
𝑡𝑛+1 1 −2 1 01
12096−
107
9450−
185
3024−
7
675−
29
30240
1
1890−
1
8400
1
302400
𝑡𝑛+3/2
1
2−1
2−1
2
1
2−
59
2419200−
5753
1209600−
4253
96768−
13411
120960−
4253
96768−
5753
1209600−
59
24192000
𝑡𝑛+2 0 1 −2 1 −1
3024000 1
5040−
8
675−
121
2016−
8
675
1
5040−
1
302400
𝑡𝑛+5/2 −1
2
5
2−7
2
3
2
109
3225600
5753
1209600
10399
241920
68459
604800
120527
967680
1223
172800−
569
604800
13
1382400
𝑡𝑛+3 −1 4 −5 2 −47
302400
107
9450
401
5040
1177
4725
9683
30240
2251
9450
1399
75600−
23
302400
𝑡𝑛+4 −2 7 −8 310247
302400−169
675
1121
1008−146
105
18653
6048−1781
1575
106483
75600
143
2880
𝑌
(𝑡) =1
ℎ3(
𝑘
∑
𝑗=0
𝛼
𝑗 𝑦𝑛+𝑗 + ℎ4
×(
𝑘
∑
𝑗=0
𝛽
𝑗 𝑓𝑛+𝑗 +
3
∑
𝑗=1
𝛽
]𝑗 𝑓𝑛+]𝑗)) .
(13)
The formula for the first, second, and third derivatives
isdepicted in Tables 1, 2, and 3, respectively.
3. Order and Stability Properties
Following the idea of Henrici [16] and Jator [2, 14], the
lineardifference operator associated with (3) is defined as
𝐿 [𝑦 (𝑡) ; ℎ] =
𝑘
∑
𝑗=0
[𝛼𝑗𝑦 (𝑡 + 𝑗ℎ) − ℎ4𝛽𝑗𝑦(4)
(𝑡 + 𝑗ℎ)]
+
3
∑
𝑗=1
[𝛼]𝑗𝑦 (𝑡 + ]𝑗ℎ) − ℎ4𝛽]𝑗𝑦(4)
(𝑡 + ]𝑗ℎ)] ,
(14)
-
4 Mathematical Problems in Engineering
Table 3: Coefficients 𝛼𝑖 and 𝛽𝑖 for the method (13) evaluated at
𝑡𝑛+𝑖/2 for 𝑖 = 0, 1, . . . , 6 and 𝑡𝑛+4.
𝑡 𝑦𝑛 𝑦𝑛+1 𝑦𝑛+2 𝑦𝑛+3 𝑓𝑛 𝑓𝑛+1/2 𝑓𝑛+1 𝑓𝑛+3/2 𝑓𝑛+2 𝑓𝑛+5/2 𝑓𝑛+3
𝑓𝑛+4
𝑡𝑛 −1 3 −3 1 −33569
226800−2357
3150−
275
4536−
8747
14175
61
360−
3317
28350
2507
113400−
19
32400
𝑡𝑛+1/2 −1 3 −3 1139673
29030400−
35453
201600−
789907
1451520−134153
907200−
9473
64512
26767
1814400−
5101
1036800
3601
29030400
𝑡𝑛+1 −1 3 −3 1 −239
226800
73
3150−
739
5670−
4577
14175−
61
1260−
647
28350
34
14175−
13
226800
𝑡𝑛+3/2 −1 3 −3 114393
29030400
1027
201600
160589
1451520
1201
129600−
40357
322560
2767
1814400−
14107
7257600
1201
29030400
𝑡𝑛+2 −1 3 −3 1 −89
226800
43
3150
1553
22680
4213
14175
379
2520−
131
4050
347
113400−
13
226800
𝑡𝑛+5/2 −1 3 −3 12399
4147200
1027
201600
30025
290304
184567
907200
161531
322560
355087
1814400−
66427
7257600
3601
29030400
𝑡𝑛+3 −1 3 −3 1 −359
226800
73
3150
29
810
5023
14175
67
252
18553
28350
2389
14175−
19
32400
𝑡𝑛+4 −1 3 −3 121631
226800−2357
3150
61601
22680−70187
14175
17131
2520−126197
28350
45341
16200
55067
226800
where𝑦(𝑡) is an arbitrary function that is sufficiently
differen-tiable. Expanding the test functions 𝑦(𝑡 + 𝑗ℎ) and 𝑦(4)(𝑡
+ 𝑗ℎ)about 𝑡 and collecting the terms we obtain
𝐿 [𝑦 (𝑥) ; ℎ] = 𝐶0𝑦 (𝑥) + 𝐶1ℎ𝑦(𝑥) + ⋅ ⋅ ⋅ + 𝐶𝑞ℎ
𝑞𝑦(𝑞)
(𝑥) + ⋅ ⋅ ⋅
(15)
whose coefficients 𝐶𝑞 for 𝑞 = 0, 1, . . . are constants and
givenas
𝐶0 =
𝑘
∑
𝑗=0
𝛼𝑗 +
3
∑
𝑗=1
𝛼]𝑗 ,
𝐶1 =
𝑘
∑
𝑗=1
𝑗𝛼𝑗 +
3
∑
𝑗=1
]𝑗𝛼]𝑗 ,
.
.
.
𝐶𝑞 =1
𝑞!
[
[
𝑘
∑
𝑗=1
𝑗𝑞𝛼𝑗 +
3
∑
𝑗=1
]𝑞𝑗𝛼]𝑗 − 𝑞 (𝑞 − 1)
× (𝑞 − 2) (𝑞 − 3)(
𝑘
∑
𝑗=1
𝑗𝑞−4
𝛽𝑗 +
3
∑
𝑗=1
]𝑞−4𝑗
𝛽]𝑗)]
]
.
(16)
According to Jator [2], the linear multistep method is said tobe
of order 𝑝 if
𝐶0 = 𝐶1 = ⋅ ⋅ ⋅ = 𝐶𝑝+3 = 0, 𝐶𝑝+4 ̸= 0. (17)
The main method (8) and the additional methods (9)are the order
eight methods with the error constants;𝐶12 are −1/207360,
−13/679477248, −1/7927234560, and29/4756340736, respectively. With
the order 𝑝 > 1, westipulate the consistency of the method (see
[2, 16]).
In the sense of Jator [2], the hybrid methods (8)-(9)
arenormalized in block form to analyze the zero stability. Thefirst
characteristic polynomial is defined as
𝜌 (𝑧) = Det [𝑧𝐴(0) − 𝐴(1)] = 𝑧6 (𝑧 − 1) (18)
with
𝐴(0)
= 7 × 7 Identity matrix,
𝐴(1)
=
[[[[[[[[[[[[[[[[[[[[[[[[[
[
0 −5
40 −
5
20 −
10
3
5
16
022
30
44
30
176
9−11
6
01
40
1
20
2
3−
1
16
0 −8 0 −16 0 −64
32
0 −1
40 −
1
20 −
2
3
1
16
0 4 0 8 032
3−1
0 4 0 8 032
3−1
]]]]]]]]]]]]]]]]]]]]]]]]]
]
.
(19)
Since the roots of (18) satisfy |𝑧𝑖| ≤ 1 for 𝑖 = 1, 2, . . . ,
7,the method is zero stable.
4. Numerical Experiment
The following problems are solved numerically to illustratethe
efficiency of the block hybrid collocation method.
-
Mathematical Problems in Engineering 5
Table 4: Numerical results for Problem 1.
ℎ Method Absolute error at 𝑡 = 2
0.1BHCM4 1.74 (−8)Adams 2.11 (−3)Jator 1.26 (−4)
0.05BHCM4 8.45 (−11)Adams 5.37 (−4)Jator 1.91 (−6)
0.025BHCM4 3.69 (−13)Adams 5.09 (−5)Jator 2.96 (−8)
0.02BHCM4 7.11 (−14)Adams 2.25 (−5)Jator 8.65 (−9)
Problem 1. Consider the linear fourth order problem
(see[2]):
𝑦(4)
= 𝑦
+ 𝑦+ 𝑦+ 2𝑦, 0 ≤ 𝑡 ≤ 2,
𝑦 (0) = 𝑦(0) = 𝑦
(0) = 0, 𝑦
(0) = 30,
(20)
and theoretical solution: 𝑦(𝑡) = 2𝑒2𝑡 − 5𝑒−𝑡 + 3 cos 𝑡 − 9 sin
𝑡.
Problem 2. Consider the nonlinear fourth order problem
(see[9]):
𝑦(4)
= (𝑦)2− 𝑦𝑦
− 4𝑡2+ 𝑒𝑡(1 + 𝑡
2− 4𝑡) , 0 ≤ 𝑡 ≤ 1,
𝑦 (0) = 𝑦(0) = 1, 𝑦
(0) = 3, 𝑦
(0) = 1,
(21)
and theoretical solution: 𝑦(𝑡) = 𝑡2 + 𝑒𝑡.
The block hybrid collocation method is implementedtogether with
the Mathematica built-in packages,namely, Solve and FindRoot for
the solution of linearand nonlinear problems, respectively.
The performance comparison between block hybrid col-location
method with the existing methods [2, 9] and theAdams
Bashforth-Adams Moulton method is presented inTables 4 and 5.The
following notations are used in the tables:
h: step size;
BHCM4: block hybrid collocation method;
Adams: Adams Bashforth-Adams Moulton method;
Awoyemi: multiderivative collocation method inAwoyemi [9];
Jator: finite difference method in Jator [2].
Tables 4 and 5 show the superiority of BHCM4 in terms ofaccuracy
over the existing Adams method, Jator finite differ-ence method
[2], and Awoyemi multiderivative collocationmethod [9].
Table 5: Numerical results for Problem 2.
ℎ Method Absolute error at 𝑡 = 1
0.2BHCM4 2.38 (−12)Adams 5.01 (−7)Awoyemi 5.84 (−4)
0.1BHCM4 1.95 (−14)Adams 2.44 (−6)Awoyemi 9.26 (−5)
Table 6: Performance comparison for Wu equation with 𝜖 = 0.
ℎ Method Absolute error at 𝑡 = 15
0.25BHCM4 5.2 (−7)Adams 4.9 (−3)Twizell 1.9 (−4)
0.1BHCM4 2.8 (−10)Adams 8.4 (−5)Cortell 3.7 (−5)
5. Application to Problem fromShip Dynamics [5–7]
The proposed method is also applied to solve a physicalproblem
from ship dynamics. As stated by Wu et al. [5],when a sinusoidal
wave of frequencyΩ passes along a ship oroffshore structure, the
resultant fluid actions vary with time𝑡. In a particular case study
by Wu et al. [5], the fourth orderproblem is defined as
𝑦(4)
+ 3𝑦+ 𝑦 (2 + 𝜖 cos (Ω𝑡)) = 0, 𝑡 > 0, (22)
which is subjected to the following initial conditions:
𝑦 (0) = 1, 𝑦(0) = 𝑦
(0) = 𝑦
(0) = 0, (23)
where 𝜖 = 0 for the existence of the theoretical solution,𝑦(𝑡) =
2 cos 𝑡−cos(𝑡√2).The theoretical solution is undefinedwhen 𝜖 ̸= 0
(see [6]).
In the literature, some numerical methods for solvingfourth
order ODEs have been extended to solve the problemfrom ship
dynamics. Numerical investigation was presentedin Twizell [6] and
Cortell [7] concerning the fourth orderODEs (22) for the cases 𝜖 =
0 and 𝜖 = 1withΩ = 0.25(√2−1).Instead of solving the fourth order
ODEs directly, Twizell[6] and Cortell [7] considered the
conventional approach ofreduction to systemof first orderODEs.
Twizell [6] developeda family of numerical methods with the global
extrapolationto increase the order of the methods. On the other
hand,Cortell [7] proposed the extension of the classical
Runge-Kutta method.
Table 6 shows the comparison in terms of accuracy for 𝑦at the
end point 𝑡 = 15. BHCM4 manages to achieve betteraccuracy compared
to Adams Bashforth-Adams Moultonmethod, Twizell [6], and Cortell
[7] when ℎ = 0.25 andℎ = 0.1, respectively.
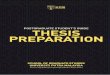
Figure 1 depicts the numerical solution for Wu equation(22) with
𝜖 = 1 and Ω = 0.25(√2 − 1) in the interval
-
6 Mathematical Problems in Engineering
2 4 6 8 10 12 14
t
−40
−20
20
y(t)
NDSolve
BHCM4, h = 0.1Cortell, h = 0.1
Figure 1: Response curve for Wu equation with 𝜖 = 1, Ω =0.25(√2
− 1).
[0, 15]. The solutions obtained by BHCM4 are in agreementwith
the observation of Cortell [7] andMathematica built-inpackage
NDSolve.
6. Conclusion
As indicated in the numerical results, the block hybrid
collo-cation method has significant improvement over the
existingmethods. Furthermore, it is applicable for the solution
ofphysical problem from ship dynamics.
As a conclusion, the block hybrid collocation methodis proposed
for the direct solution of general fourth orderODEs whereby it is
implemented as self-starting method thatgenerates the solution of 𝑦
at four main points and three off-step points concurrently.
Conflict of Interests
The authors declare that there is no conflict of
interestsregarding the publication of this paper.
References
[1] A. K. Alomari, N. Ratib Anakira, A. S. Bataineh, and I.
Hashim,“Approximate solution of nonlinear system of BVP arising
influid flow problem,”Mathematical Problems in Engineering,
vol.2013, Article ID 136043, 7 pages, 2013.
[2] S. N. Jator, “Numerical integrators for fourth order initial
andboundary value problems,” International Journal of Pure
andApplied Mathematics, vol. 47, no. 4, pp. 563–576, 2008.
[3] O. Kelesoglu, “The solution of fourth order boundary
valueproblem arising out of the beam-column theory
usingAdomiandecomposition method,” Mathematical Problems in
Engineer-ing, vol. 2014, Article ID 649471, 6 pages, 2014.
[4] A. Boutayeb and A. Chetouani, “A mini-review of
numericalmethods for high-order problems,” International Journal
ofComputer Mathematics, vol. 84, no. 4, pp. 563–579, 2007.
[5] X. J. Wu, Y. Wang, and W. G. Price, “Multiple
resonances,responses, and parametric instabilities in offshore
structures,”Journal of Ship Research, vol. 32, no. 4, pp. 285–296,
1988.
[6] E.H. Twizell, “A family of numericalmethods for the solution
ofhigh-order general initial value problems,” Computer Methodsin
Applied Mechanics and Engineering, vol. 67, no. 1, pp.
15–25,1988.
[7] R. Cortell, “Application of the fourth-order
Runge-Kuttamethod for the solution of high-order general initial
valueproblems,”Computers and Structures, vol. 49, no. 5, pp.
897–900,1993.
[8] A. Malek and R. Shekari Beidokhti, “Numerical solutionfor
high order differential equations using a hybrid neu-ral
network—optimization method,” Applied Mathematics andComputation,
vol. 183, no. 1, pp. 260–271, 2006.
[9] D. O. Awoyemi, “Algorithmic collocation approach for
directsolution of fourth-order initial-value problems of
ordinarydifferential equations,” International Journal of
ComputerMath-ematics, vol. 82, no. 3, pp. 321–329, 2005.
[10] N.Waeleh, Z. A. Majid, F. Ismail, andM. Suleiman,
“Numericalsolution of higher order ordinary differential equations
bydirect block code,” Journal of Mathematics and Statistics, vol.
8,no. 1, pp. 77–81, 2011.
[11] S. J. Kayode, “Anorder six zero-stablemethod for direct
solutionof fourth order ordinary differential equations,”
AmericanJournal of Applied Sciences, vol. 5, no. 11, pp. 1461–1466,
2008.
[12] S. J. Kayode, “An efficient zero-stable numerical method
forfourth-order differential equations,” International Journal
ofMathematics and Mathematical Sciences, vol. 2008, Article
ID364021, 10 pages, 2008.
[13] B. T. Olabode and T. J. Alabi, “Direct block
predictor-correctormethod for the solution of general fourth order
ODEs,” Journalof Mathematics Research, vol. 5, no. 1, pp. 26–33,
2013.
[14] S. N. Jator, “Solving second order initial value problems
by ahybrid multistep method without predictors,” Applied
Mathe-matics and Computation, vol. 217, no. 8, pp. 4036–4046,
2010.
[15] L. K. Yap, F. Ismail, and N. Senu, “An accurate block
hybrid col-locationmethod for third order ordinary differential
equations,”Journal of Applied Mathematics, vol. 2014, Article ID
549597, 9pages, 2014.
[16] P. Henrici, Discrete Variable Methods in Ordinary
DifferentialEquations, John Wiley & Sons, New York, NY, USA,
1962.
-
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Probability and StatisticsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
CombinatoricsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical
Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
The Scientific World JournalHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014
Stochastic AnalysisInternational Journal of