-
Hindawi Publishing CorporationJournal of Applied
MathematicsVolume 2013, Article ID 620238, 11
pageshttp://dx.doi.org/10.1155/2013/620238
Research ArticleAnalysis of Third-Grade Fluid in Helical Screw
Rheometer
M. Zeb,1 S. Islam,2 A. M. Siddiqui,3 and T. Haroon1
1 Department of Mathematics, COMSATS Institute of Information
Technology, Islamabad, Pakistan2Department of Mathematics, Abdul
Wali Khan University, Mardan, Pakistan3 Department of Mathematics,
Pennsylvania State University, York Campus, York, PA 17 403,
USA
Correspondence should be addressed to M. Zeb;
[email protected]
Received 17 October 2012; Revised 4 March 2013; Accepted 20
March 2013
Academic Editor: Juan Torregrosa
Copyright © 2013 M. Zeb et al. This is an open access article
distributed under the Creative Commons Attribution License,
whichpermits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
The steady flowof an incompressible, third-grade fluid in
helical screw rheometer (HSR) is studied by “unwrapping or
flattening” thechannel, lands, and the outside rotating barrel. The
geometry is approximated as a shallow infinite channel, by assuming
that thewidth of the channel is large as compared to the depth. The
developed second-order nonlinear coupled differential equations
arereduced to single differential equation by using a
transformation. Using Adomian decomposition method, analytical
expressionsare calculated for the the velocity profiles and volume
flow rates.The results have been discussed with the help of graphs
as well. Weobserved that the velocity profiles are strongly
dependant on non-Newtonian parameter ( ̃𝛽), and with the increase
in ̃𝛽, the velocityprofiles increase progressively, which conclude
that extrusion process increases with the increase in ̃𝛽. We also
observed that theincrease in pressure gradients in x- and
z-direction increases the net flow inside the helical screw
rheometer, which increases theextrusion process. We noticed that
the flow increases as the flight angle increase.
1. Introduction
In real life, there are many materials that exhibit the
mechan-ical characteristics of both elasticity and viscosity.
Thesematerials are known as non-Newtonian fluids. These
fluidscannot be described satisfactorily by the theory of
elasticity orviscosity but by a combination of both. Due to the
rheologicalbehavior of these fluids, many constitutive equations
are pro-posed [1]. In most fluid food products, the shear stress
isdependent on the share rate; hence, nonlinear flow curveresults
and a unique viscosity are no longer adequate to char-acterize the
fluid. Many fluids such as molten plastics, poly-mers, and slurries
are non-Newtonian in their flow behav-ior. The basic governing
equations for such fluids motionare highly nonlinear differential
equations having no generalsolution, and only a limited number of
exact solutions havebeen established for particular problems. To
solve practi-cal problems in engineering and mathematics,
researchersand scientists have developed numerous numerical
tech-niques, that is, finite difference method (FDM), finite
vol-ume approach, control-volume-based finite element
method(CVFEM), lattice Boltzmann method (LBM), and analytical
techniques, that is, variational iteration method
(VIM),perturbation method (PM), homotopy perturbation method(HPM),
HPM-Pade technique, homotopy analysis method(HAM), optimal homotopy
analysis method (OHAM), opti-mal homotopy perturbation method
(OHPM), and someother techniques, to overcome nonlinearity and get
numer-ical and analytical solutions [2–10]. A brief review on
ana-lytical techniques is presented by [11]. In recent years inthe
area of series solutions, an iterative technique
Adomiandecomposition method [12, 13] has received much attention.A
considerable amount of research work has been investedin the
application of this method to a wide class of linear,nonlinear, and
partial differential equations and integralequations. Many
interesting problems in applied science andengineering have been
successfully solved by using ADMto their higher degree of accuracy.
A useful quality of theADM is that it has proved to be a
competitive alternative tothe Taylor series method and other series
techniques. Thismethod has been used in obtaining analytic and
approximatesolutions to a wide class of linear and nonlinear,
differ-ential and integral equations, homogeneous or
inhomoge-neous, with constant coefficients or with variable
coefficients.
-
2 Journal of Applied Mathematics
The Adomian decomposition method is comparatively eas-ier to
program in engineering problems than other seriesmethods and
provides immediate and visible solution termswithout linearization,
perturbation, or discretization of theproblem, while the physical
behavior of the solution remainsunchanged. It provides analytical
solution in the form of aninfinite series in which each term can be
easily determined[14–16]. If an exact solution exists for the
problem, thenthe obtained series converges very rapidly to the
solution.For concrete problems, where a closed-form solution is
notobtainable, a truncated number of terms are usually used
fornumerical purposes [17].
The Helical Screw Rheometer (HSR) consists of a helicalscrew in
a tight fitting cylinder, with the inlet and outlet partsclosing
the inner screw. Rotation of screw creates a pressuregradient along
the axis of the screw. The HSR is being usedfor rheological
measurements of fluid food suspensions. Thegeometry of an HSR is
similar to a single-screw extruder [18].Extrusion process is widely
used in multigrade oils, liquiddetergents, paints, polymer
solutions and polymer melts [19],the injection molding process for
polymeric materials, theproduction of pharmaceutical products, food
extrusion, andprocessing of plastics [20]. Various food items in
daily life,such as cookie dough, sevai, pastas, breakfast cereals,
frenchfries, baby food, ready to eat snacks, and dry pet food,
aremost commonly manufactured using the extrusion process.
Knowledge of rheological properties is essential in
theprocessing of fluid foods since these affect the flow
behavior.During processing, physical and chemical changes can
occurso it is desirable to monitor the process to achieve
excellentoutput and quality control [21]. On-line rheological
measure-ments in the food industry have been limited [22].
Bird et al. [23] presented an asymptotic solution andarbitrary
values of the flow behavior index, for the power-law fluid in a
very thin annulus. A brief discussion is givenbyMohr andMallouk
[24] for the same problem consideringNewtonian fluid in a screw
extruder. Tamura et al. [18] alsoinvestigated the flow of Newtonian
fluid in helical screwrheometer.
The objective of this paper is to study the flow of third-grade
fluid in helical screw rheometer (HSR)where the effectsof curvature
and also of flights are neglected by assumingthat the helical
channel is “unwrapped.” The geometry isapproximated as a shallow
infinite channel, with ℎ/𝐵 ≪ 1,where 𝐵 denotes the channel width
and ℎ is gap [18]. Theformulation results in second-order nonlinear
coupled dif-ferential equations which are reduced to first-order
nonlineardifferential equations by integrating and combined in
singlefirst-order differential equation using a transformation,
thesolution is obtained by using ADM. Analytical expressionsare
given for the velocity components in 𝑥-, 𝑧-directionsand in
direction of the screw axis. Volume flow rates arealso obtained for
all three types of velocities. The paperis organized as follows.
Section 2 contains the governingequations of the fluid model. In
Section 3, the problemunder consideration is formulated. In Section
4, descriptionof Adomian decompositionmethod is given. In Section
5, thegoverning equation of the problem is solved. In Section
6,results are discussed. Section 7 contains conclusion.
2. Basic Equations
The basic equations governing the motion of an incompress-ible
fluid are
divV = 0, (1)
𝜌
𝐷V𝐷𝑡
= 𝜌f + divT, (2)
where 𝜌 is the constant fluid density,V is the velocity vector,
fis the body force per unitmass, the𝐷/𝐷𝑡 denotes thematerialtime
derivative defined as
𝐷 (∗)
𝐷𝑡
=
𝜕
𝜕𝑡
(∗) + (V ⋅ ∇) (∗) , (3)
and T is the Cauchy stress tensor, given as
T = −𝑃I + S, (4)
where 𝑃 denotes the dynamic pressure, I denotes unit tensor,and
S denotes the extra stress tensor. The constitutive equa-tion for
third-grade fluid is defined as
S = 𝜇A1+ 𝛼
1A2+ 𝛼
2A21+ 𝛽
1A3
+ 𝛽
2(A1A2+ A2A1) + 𝛽
3(trA21)A1,
(5)
where 𝜇 is the viscosity, 𝛼1, 𝛼2, 𝛽1, 𝛽2, and 𝛽
3are the material
constants, A1, A2, and A
3are the first three Rivlin-Ericksen
tensors defined as [19]
A1= (gradV) + (gradV)𝑇,
A𝑛+1
=
𝐷A𝑛
𝐷𝑡
+ [A𝑛(gradV) + (gradV)𝑇A
𝑛] , (𝑛 = 1, 2) .
(6)
3. Problem Formulation
Consider the steady flow of an isothermal, incompressibleand
homogeneous third-grade fluid in helical screw rheome-ter (HSR) in
such a way that the curvature of the screw chan-nel is ignored,
unrolled and laid out on a flat surface. Thebarrel surface is also
flattened. Assume that the screw surface,the lower plate, is
stationary, and the barrel surface, the upperplate, is moving
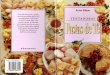
across the top of the channel with velocity𝑉 at an angle 𝜙 to the
direction of the channel Figure 1. Thephenomena is the same as the
barrel held stationary and thescrew rotates. The geometry is
approximated as a shallowinfinite channel, by assuming that the
width 𝐵 of the channelis large compared with the depth ℎ; edge
effects in the fluidat the land are ignored. The coordinate axes
are positionedin such a way that the 𝑥-axis is perpendicular to the
walland 𝑧-axis is in down channel direction. The liquid wets allthe
surfaces and moves by the shear stresses produced by therelative
movement of the barrel and channel. For simplicity,the velocity of
the barrel relative to the channel is broken upinto two
components:𝑈 is along 𝑥-axis and𝑊 is along 𝑧-axis
-
Journal of Applied Mathematics 3
𝐵
sin 𝜙
Moving barrelsurface
Stationarychannel
Axis of screw
Small gapbetween barrel
and lands
𝑥𝑧
𝑉
𝑊
ℎ
𝐵
𝜙
𝑋
𝑋
𝑈
Figure 1:The geometry of the “unwrapped” screw channel and
bar-rel surface.
[24]. Under these assumptions the velocity field and
cauchystress tensor can be written as
V = [𝑢 (𝑦) , 0, 𝑤 (𝑦)] , T = T (𝑦) . (7)
On substituting (7) in (4) and (5), we obtain nonzero
compo-nents of Cauchy stress T,
𝜏
𝑥𝑥= −𝑃 + 𝛼
2(
𝑑𝑢
𝑑𝑦
)
2
,
𝜏
𝑥𝑦= 𝜏
𝑦𝑥= 𝜇
𝑑𝑢
𝑑𝑦
+ 2 (𝛽
2+ 𝛽
3) {(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑢
𝑑𝑦
,
𝜏
𝑥𝑧= 𝜏
𝑧𝑥= 𝛼
2
𝑑𝑢
𝑑𝑦
𝑑𝑤
𝑑𝑦
,
𝜏
𝑦𝑦= −𝑃 + (2𝛼
1+ 𝛼
2) [(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
] ,
𝜏
𝑦𝑧= 𝜏
𝑧𝑦= 𝜇
𝑑𝑤
𝑑𝑦
+ 2 (𝛽
2+ 𝛽
3) {(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑤
𝑑𝑦
,
𝜏
𝑧𝑧= −𝑃 + 𝛼
2(
𝑑𝑤
𝑑𝑦
)
2
,
(8)
where T = [𝜏𝑖𝑗].
Using (7), (1) is identically satisfied, and (2) in the
absenceof body forces results in
0 = −
𝜕𝑃
𝜕𝑥
+
𝜕
𝜕𝑦
× [𝜇
𝑑𝑢
𝑑𝑦
+ 2 (𝛽
2+ 𝛽
3) {(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑢
𝑑𝑦
] ,
0 = −
𝜕𝑃
𝜕𝑦
+
1
2
(2𝛼
1+ 𝛼
2)
𝜕
𝜕𝑦
[(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
] ,
0 = −
𝜕𝑃
𝜕𝑧
+
𝜕
𝜕𝑦
× [𝜇
𝑑𝑤
𝑑𝑦
+ 2 (𝛽
2+ 𝛽
3) {(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑤
𝑑𝑦
] .
(9)
Define the modified pressure ̂𝑃 as
̂
𝑃 = 𝑃 − (𝛼
1+
1
2
𝛼
2){(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
} , (10)
which implies that ̂𝑃 = ̂𝑃(𝑥, 𝑧) only; thus, (9) reduce to
𝑑
2𝑢
𝑑𝑦
2+
2 (𝛽
2+ 𝛽
3)
𝜇
𝑑
𝑑𝑦
[{(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑢
𝑑𝑦
] =
1
𝜇
𝜕
̂
𝑃
𝜕𝑥
,
𝑑
2𝑤
𝑑𝑦
2+
2 (𝛽
2+ 𝛽
3)
𝜇
𝑑
𝑑𝑦
[{(
𝑑𝑢
𝑑𝑦
)
2
+ (
𝑑𝑤
𝑑𝑦
)
2
}
𝑑𝑤
𝑑𝑦
] =
1
𝜇
𝜕
̂
𝑃
𝜕𝑧
.
(11)
The associated boundary conditions can be taken as (seeFigure
1)
𝑢 = 0, 𝑤 = 0, at 𝑦 = 0,
𝑢 = 𝑈, 𝑤 = 𝑊, at 𝑦 = ℎ,(12)
where
𝑈 = −𝑉 sin𝜙, 𝑊 = 𝑉 cos𝜙. (13)
Introducing nondimensionalized parameters
𝑥
∗=
𝑥
ℎ
, 𝑦
∗=
𝑦
ℎ
, 𝑧
∗=
𝑧
ℎ
, 𝑢
∗=
𝑢
𝑊
, 𝑤
∗=
𝑤
𝑊
,
𝑃
∗=
𝑃
𝜇 (𝑊/ℎ)
,
̃
𝛽
∗=
(𝛽
2+ 𝛽
3)𝑊
2
𝜇ℎ
2,
(14)
-
4 Journal of Applied Mathematics
in (11)-(12), takes the form
𝑑
2𝑢
∗
𝑑𝑦
∗2+
̃
𝛽
∗ 𝑑
𝑑𝑦
∗[{(
𝑑𝑢
∗
𝑑𝑦
∗)
2
+ (
𝑑𝑤
∗
𝑑𝑦
∗)
2
}
𝑑𝑢
∗
𝑑𝑦
∗] =
𝜕𝑃
∗
𝜕𝑥
∗,
𝑑
2𝑤
∗
𝑑𝑦
∗2+
̃
𝛽
∗ 𝑑∗
𝑑𝑦
∗[{(
𝑑𝑢
∗
𝑑𝑦
∗)
2
+ (
𝑑𝑤
∗
𝑑𝑦
∗)
2
}
𝑑𝑤
∗
𝑑𝑦
∗] =
𝜕𝑃
∗
𝜕𝑧
∗,
𝑢
∗= 0, 𝑤
∗= 0, at 𝑦∗ = 0,
𝑢
∗=
𝑈
𝑊
, 𝑤
∗= 1, at 𝑦∗ = 1.
(15)
Dropping "∗" from (15) onward and defining
𝐹 = 𝑢 + 𝜄𝑤, 𝑉
0=
𝑈
𝑊
+ 𝜄1, 𝐺 = 𝑃
,𝑥+ 𝜄𝑃
,𝑧, (16)
where 𝜕𝑃/𝜕𝑥 = 𝑃,𝑥, 𝜕𝑃/𝜕𝑧 = 𝑃
,𝑧in (15) reduce to
𝑑
2𝐹
𝑑𝑦
2= 𝐺 −
̃
𝛽{(
𝑑𝐹
𝑑𝑦
)
2𝑑
2𝐹
𝑑𝑦
2+ 2
𝑑𝐹
𝑑𝑦
𝑑
2𝐹
𝑑𝑦
2
𝑑𝐹
𝑑𝑦
} , (17)
where 𝐹 is the complex conjugate of 𝐹.The boundary conditions
become
𝐹 = 0 at 𝑦 = 0,
𝐹 = 𝑉
0at 𝑦 = 1.
(18)
Equation (17) is second-order nonlinear ordinary
differentialequation, and the exact solution seems to be difficult.
In thefollowing section, we use Adomian decomposition methodto
obtain the approximate solution. To obtain the expressionsfor the
velocity components in 𝑥- and 𝑧-directions, (17)together with the
boundary conditions (18) is solved up tothe second component
approximations by using the symboliccomputation software Wolfram
Mathematica 7.
4. Description of AdomianDecomposition Method
Consider equation 𝐽[𝐹(𝑦)] = 𝑔(𝑦), where 𝐽 represents ageneral
nonlinear ordinary or partial differential operatorincluding both
linear and nonlinear terms. The linear termsare decomposed into 𝐿 +
𝑅, where 𝐿 is invertible. 𝐿 is takenas the highest-order derivative
to avoid difficult integrations,and 𝑅 is the remainder of the
linear operator. Thus, theequation can be written as
𝐿 (𝐹) + 𝑅 (𝐹) + 𝑁 (𝐹) = 𝑔 (𝑦) , (19)
where𝑁(𝐹) indicates the nonlinear term and 𝑔(𝑦) is
forcingfunction. Since 𝐿 is invertible, so 𝐿−1 exist. The above
equa-tion can be written as
𝐿
−1𝐿 (𝐹) = 𝐿
−1𝑔 (𝑦) − 𝐿
−1𝑅 (𝐹) − 𝐿
−1𝑁(𝐹) . (20)
If 𝐿(= 𝑑2/𝑑𝑦2) is a second-order operator, 𝐿−1(=∫ ∫(∗)𝑑𝑦 𝑑𝑦) is
a twofold indefinite integral. Equation (20)becomes
𝐹 = 𝐶
1+ 𝐶
2𝑦 + 𝐿
−1𝑔 (𝑦) − 𝐿
−1𝑅 (𝐹) − 𝐿
−1𝑁(𝐹) , (21)
where 𝐶1and 𝐶
2are constants of integration and can be
determined by using boundary or initial conditions. ADMassumes
that the solution 𝐹 can be expanded into infiniteseries as 𝐹 =
∑∞
𝑛=0𝐹
𝑛; also, the nonlinear term 𝑁(𝐹) will be
written as 𝑁(𝐹) = ∑∞𝑛=0
𝐴
𝑛, where 𝐴
𝑛are special Adomian
polynomials which can be defined as
𝐴
𝑛=
1
𝑛!
[
𝑑
𝑛
𝑑𝜆
𝑛{𝑁(
∞
∑
𝑖=0
𝜆
𝑖𝐹
𝑖)}]
𝜆=0
𝑛 = 0, 1, 2, 3, . . . ,
(22)
finally, the solution can be written as
∞
∑
𝑛=0
𝐹
𝑛= 𝐹
0− 𝐿
−1𝑅(
∞
∑
𝑛=0
𝐹
𝑛) − 𝐿
−1(
∞
∑
𝑛=0
𝐴
𝑛) , (23)
where
𝐹
0= 𝐶
1+ 𝐶
2𝑦 + 𝐿
−1𝑔 (𝑦) (24)
is initial solution and
𝐹
𝑛= −𝐿
−1𝑅 (𝐹
𝑛−1) − 𝐿
−1𝐴
𝑛−1, 𝑛 ≥ 1, (25)
and (25) is 𝑛th-order solution. The practical solution will
bethe 𝑛-term approximation
𝜙
𝑛=
𝑛−1
∑
𝑖=0
𝐹
𝑖, (26)
and by definition [25–27],
lim𝑛→∞
𝜙
𝑛=
𝑛−1
∑
𝑖=0
𝐹
𝑖= 𝐹. (27)
5. Solution of the Problem
Adomian decomposition method describes that in the oper-ator
form (17) can be written as
𝐿 (𝐹) = 𝐺 −
̃
𝛽{(
𝑑𝐹
𝑑𝑦
)
2𝑑
2𝐹
𝑑𝑦
2+ 2
𝑑𝐹
𝑑𝑦
𝑑
2𝐹
𝑑𝑦
2
𝑑𝐹
𝑑𝑦
} , (28)
where 𝐿 is the differential operator taken as the
highest-orderderivative to avoid difficult integrations, assuming
that 𝐿 isinvertible, which implies that 𝐿−1 = ∫∫(∗)𝑑𝑦 𝑑𝑦 exist.
On applying 𝐿−1 to both sides of (28) results in
𝐹 = 𝐴 + 𝐵𝑦 + 𝐿
−1(𝐺) −
̃
𝛽𝐿
−1
× {(
𝑑𝐹
𝑑𝑦
)
2𝑑
2𝐹
𝑑𝑦
2+ 2
𝑑𝐹
𝑑𝑦
𝑑
2𝐹
𝑑𝑦
2
𝑑𝐹
𝑑𝑦
} ,
(29)
-
Journal of Applied Mathematics 5
where 𝐴 and 𝐵 are constants of integration and can be
deter-mined by using boundary conditions. According to proce-dure
of Adomian decomposition method 𝐹 and 𝐹 can bewritten in component
form as:
𝐹 =
∞
∑
𝑛=0
𝐹
𝑛,
𝐹 =
∞
∑
𝑛=0
𝐹
𝑛.
(30)
Thus, (29) takes the form∞
∑
𝑛=0
𝐹
𝑛= 𝐴 + 𝐵𝑦 + 𝐿
−1(𝐺) −
̃
𝛽𝐿
−1
× {(
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛))
2
(
𝑑
2
𝑑𝑦
2(
∞
∑
𝑛=0
𝐹
𝑛))
+ 2(
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛))(
𝑑
2
𝑑𝑦
2(
∞
∑
𝑛=0
𝐹
𝑛))
× (
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛))} .
(31)
Adomian also suggested that the nonlinear terms can beexplored
in the form of Adomian polynomials, say, 𝐴
𝑛and
𝐵
𝑛as∞
∑
𝑛=0
𝐴
𝑛= (
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛))
2
(
𝑑
2
𝑑𝑦
2(
∞
∑
𝑛=0
𝐹
𝑛)) ,
∞
∑
𝑛=0
𝐵
𝑛= 2(
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛))(
𝑑
2
𝑑𝑦
2(
∞
∑
𝑛=0
𝐹
𝑛))(
𝑑
𝑑𝑦
(
∞
∑
𝑛=0
𝐹
𝑛)) .
(32)
Equation (31) yields∞
∑
𝑛=0
𝐹
𝑛= 𝐴 + 𝐵𝑦 + 𝐿
−1(𝐺) −
̃
𝛽𝐿
−1(
∞
∑
𝑛=0
𝐴
𝑛+
∞
∑
𝑛=0
𝐵
𝑛) .
(33)
The associated boundary conditions (18) will be∞
∑
𝑛=0
𝐹
𝑛= 0, 𝑦 = 0,
∞
∑
𝑛=0
𝐹
𝑛= 𝑉
0, 𝑦 = 1.
(34)
The recursive relation in (33) and (34) gives the
componentproblems
𝐹
0= 𝐴 + 𝐵𝑦 + 𝐿
−1(𝐺) , (35)
along with boundary conditions
𝐹
0= 0, 𝑦 = 0,
𝐹
0= 𝑉
0, 𝑦 = 1,
(36)
𝐹
𝑗+1= −
̃
𝛽𝐿
−1(𝐴
𝑗+ 𝐵
𝑗) , 𝑗 ≥ 0 (37)
together with the boundary conditions
∞
∑
𝑛=1
𝐹
𝑛= 0, 𝑦 = 0,
∞
∑
𝑛=1
𝐹
𝑛= 0, 𝑦 = 1.
(38)
The ADM solution to (33) along with the boundary condi-tions
(34) will be
𝐹 =
∞
∑
𝑛=0
𝐹
𝑛. (39)
5.1. Zeroth Component Solution. The relations (35) and (36)give
the zeroth component problem
𝐹
0= 𝐴 + 𝐵𝑦 + 𝐿
−1(𝐺) , (40)
and the boundary conditions are
𝐹
0= 0 at 𝑦 = 0,
𝐹
0= 𝑉
0at 𝑦 = 1,
(41)
which gives the solution
𝑢
0=
𝑈
𝑊
𝑦 +
1
2
𝑃
,𝑥(𝑦
2− 𝑦) , (42)
𝑤
0= 𝑦 +
1
2
𝑃
,𝑧(𝑦
2− 𝑦) , (43)
which are the linearly viscous solutions to the problem.
5.2. First Component Solution. Equations (37) and (38) give
𝐹
1= −
̃
𝛽𝐿
−1(𝐴
0+ 𝐵
0) , (44)
𝐹
1= 0 at 𝑦 = 0,
𝐹
1= 0 at 𝑦 = 1,
(45)
where the remainder term 𝑅 of the linear part is zero and
𝐴
0= (
𝑑𝐹
0
𝑑𝑦
)
2𝑑
2𝐹
0
𝑑𝑦
2,
𝐵
0= 2(
𝑑𝐹
0
𝑑𝑦
𝑑
2𝐹
0
𝑑𝑦
2
𝑑𝐹
0
𝑑𝑦
)
(46)
are Adomian polynomials. Using (45)-(46) in (44) results in
𝑢
1= −
̃
𝛽 {𝐿
11(𝑦
2− 𝑦) + 𝐿
12(𝑦
3− 𝑦) + 𝐿
13(𝑦
4− 𝑦)} ,
(47)
𝑤
1= −
̃
𝛽 {𝑇
11(𝑦
2− 𝑦) + 𝑇
12(𝑦
3− 𝑦) + 𝑇
13(𝑦
4− 𝑦)} ,
(48)
where 𝐿11, 𝐿12, 𝐿13, 𝑇11, 𝑇12, and 𝑇
13are constants given in
appendix.
-
6 Journal of Applied Mathematics
5.3. Second Component Solution. The relations (37) and
(38)give
𝐹
2= −
̃
𝛽𝐿
−1(𝐴
1+ 𝐵
1) ,
𝐹
2= 0 at 𝑦 = 0,
𝐹
2= 0 at 𝑦 = ℎ,
(49)
𝐴
1= (
𝑑𝐹
0
𝑑𝑦
)
2𝑑
2𝐹
1
𝑑𝑦
2+ 2
𝑑𝐹
0
𝑑𝑦
𝑑𝐹
1
𝑑𝑦
𝑑
2𝐹
0
𝑑𝑦
2,
𝐵
1= 2(
𝑑𝐹
0
𝑑𝑦
𝑑
2𝐹
0
𝑑𝑦
2
𝑑𝐹
1
𝑑𝑦
+
𝑑𝐹
0
𝑑𝑦
𝑑
2𝐹
1
𝑑𝑦
2
𝑑𝐹
0
𝑑𝑦
+
𝑑𝐹
1
𝑑𝑦
𝑑
2𝐹
0
𝑑𝑦
2
𝑑𝐹
0
𝑑𝑦
) ,
(50)
where 𝐴1and 𝐵
1are Adomian polynomials.
Using (50) in (49), we get
𝑢
2=
̃
𝛽
2{𝐿
14(𝑦
2− 𝑦) + 𝐿
15(𝑦
3− 𝑦) + 𝐿
16(𝑦
4− 𝑦)
+ 𝐿
17(𝑦
5− 𝑦) + 𝐿
18(𝑦
6− 𝑦)} ,
(51)
𝑤
2=
̃
𝛽
2{𝑇
14(𝑦
2− 𝑦) + 𝑇
15(𝑦
3− 𝑦) + 𝑇
16(𝑦
4− 𝑦)
+ 𝑇
17(𝑦
5− 𝑦) + 𝑇
18(𝑦
6− 𝑦)} ,
(52)
where 𝐿14, 𝐿15, 𝐿16, 𝐿17, 𝐿18, 𝑇14, 𝑇15, 𝑇16, 𝑇17, and 𝑇
18are
constants mentioned in appendix.
5.4. Velocity Profiles
5.4.1. Velocity Profile in 𝑥-Direction. Equations (42), (47),and
(51) give the ADM solution for the velocity profile in
thetransverse plane
𝑢 =
𝑈
𝑊
𝑦 + (
1
2
𝑃
,𝑥+
̃
𝛽𝐿
11+
̃
𝛽
2𝐿
14) (𝑦
2− 𝑦)
+ (
̃
𝛽𝐿
12+
̃
𝛽
2𝐿
15) (𝑦
3− 𝑦) + (
̃
𝛽𝐿
13+
̃
𝛽
2𝐿
16) (𝑦
4− 𝑦)
+
̃
𝛽
2𝐿
17(𝑦
5− 𝑦) +
̃
𝛽
2𝐿
18(𝑦
6− 𝑦) .
(53)
5.4.2. Velocity Profile in 𝑧-Direction. Equations (43), (48)
and(52) give the ADM solution for the velocity profile in thedown
channel direction
𝑤 = 𝑦 + (
1
2
𝑃
,𝑧+
̃
𝛽𝑇
11+
̃
𝛽
2𝑇
14) (𝑦
2− 𝑦)
+ (
̃
𝛽𝑇
12+
̃
𝛽
2𝑇
15) (𝑦
3− 𝑦) + (
̃
𝛽𝑇
13+
̃
𝛽
2𝑇
16) (𝑦
4− 𝑦)
+
̃
𝛽
2𝑇
17(𝑦
5− 𝑦) +
̃
𝛽
2𝑇
18(𝑦
6− 𝑦) .
(54)
5.4.3. Velocity in the Direction of the Axis of Screw. The
veloc-ity in the direction of the axis of the screw at any depth in
thechannel can be computed from (53) and (54) as
𝑠 = 𝑤 sin𝜙 + 𝑢 cos𝜙, (55)
𝑠 = {𝑦 + (
1
2
𝑃
,𝑧+
̃
𝛽𝑇
11+
̃
𝛽
2𝑇
14) (𝑦
2− 𝑦)
+ (
̃
𝛽𝑇
12+
̃
𝛽
2𝑇
15) (𝑦
3− 𝑦)
+ (
̃
𝛽𝑇
13+
̃
𝛽
2𝑇
16) (𝑦
4− 𝑦) +
̃
𝛽
2𝑇
17(𝑦
5− 𝑦)
+
̃
𝛽
2𝑇
18(𝑦
6− 𝑦)} sin𝜙
+ {
𝑈
𝑊
𝑦 + (
1
2
𝑃
,𝑥+
̃
𝛽𝐿
11+
̃
𝛽
2𝐿
14) (𝑦
2− 𝑦)
+ (
̃
𝛽𝐿
12+
̃
𝛽
2𝐿
15) (𝑦
3− 𝑦)
+ (
̃
𝛽𝐿
13+
̃
𝛽
2𝐿
16) (𝑦
4− 𝑦) +
̃
𝛽
2𝐿
17(𝑦
5− 𝑦)
+
̃
𝛽
2𝐿
18(𝑦
6− 𝑦) } cos𝜙,
(56)
which shows the resultant velocity of the flow.
5.5. Volume Flow Rates. Volume flow rate in 𝑥-direction perunit
width is
𝑄
∗
𝑥= ∫
1
0
𝑢 𝑑𝑦,(57)
where 𝑄∗𝑥= 𝑄
𝑥/𝑊ℎ𝐵, and (57) gives
𝑄
∗
𝑥=
𝑈
2𝑊
−
1
6
(
1
2
𝑃
,𝑥+
̃
𝛽𝐿
11+
̃
𝛽
2𝐿
14) −
1
4
(
̃
𝛽𝐿
12+
̃
𝛽
2𝐿
15)
−
3
10
(
̃
𝛽𝐿
13+
̃
𝛽
2𝐿
16) −
1
3
̃
𝛽
2𝐿
17−
5
14
̃
𝛽
2𝐿
18.
(58)
Volume flow rate in 𝑧-direction per unit width is
𝑄
∗
𝑧= ∫
1
0
𝑤𝑑𝑦,(59)
where 𝑄∗𝑧= 𝑄
𝑧/𝑊ℎ𝐵, and (59) gives
𝑄
∗
𝑧=
1
2
−
1
6
(
1
2
𝑃
,𝑧+
̃
𝛽𝑇
11+
̃
𝛽
2𝑇
14) −
1
4
(
̃
𝛽𝑇
12+
̃
𝛽
2𝑇
15)
−
3
10
(
̃
𝛽𝑇
13+
̃
𝛽
2𝑇
16) −
1
3
̃
𝛽
2𝑇
17−
5
14
̃
𝛽
2𝑇
18.
(60)
Equation (56) gives the resultant volume flow rate forward inthe
screw channel, which is the product of the velocity
andcross-sectional area integrated from the root of the screw tothe
barrel surface
𝑄
∗=
𝑛
sin𝜙∫
1
0
𝑠 𝑑𝑦, (61)
-
Journal of Applied Mathematics 7
0 0.2 0.4 0.6 0.8 1
0
1
2
3
−1
�̃� = 0.9
�̃� = 0.7
�̃� = 0.5
�̃� = 0.3
�̃� = 0
𝑢(𝑦)
𝑦
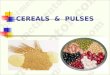
Figure 2: Profile of the nondimensional velocity 𝑢(𝑦) for
differentvalues of ̃𝛽, keeping 𝑃
,𝑥= −2.0, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
where𝑄∗ = 𝑄/𝑊ℎ𝐵 and 𝑛 is the number of parallel flights ina
multiflight screw.
Equation (61) gives
𝑄
∗=
𝑛
sin𝜙[{
1
2
−
1
6
(
1
2
𝑃
,𝑧+
̃
𝛽𝑇
11+
̃
𝛽
2𝑇
14)
−
1
4
(
̃
𝛽𝑇
12+
̃
𝛽
2𝑇
15) −
3
10
(
̃
𝛽𝑇
13+
̃
𝛽
2𝑇
16)
−
1
3
̃
𝛽
2𝑇
17−
5
14
̃
𝛽
2𝑇
18} sin𝜙
+ {
𝑈
2𝑊
−
1
6
(
1
2
𝑃
,𝑥+
̃
𝛽𝐿
11+
̃
𝛽
2𝐿
14)
−
1
4
(
̃
𝛽𝐿
12+
̃
𝛽
2𝐿
15) −
3
10
(
̃
𝛽𝐿
13+
̃
𝛽
2𝐿
16)
−
1
3
̃
𝛽
2𝐿
17−
5
14
̃
𝛽
2𝐿
18} cos𝜙] ,
(62)
which can be written as
𝑄
∗=
𝑛
sin𝜙{𝑄
∗
𝑧sin𝜙 + 𝑄∗
𝑥cos𝜙} . (63)
6. Results and Discussion
In the present work, we have considered the steady flowof an
incompressible, isothermal, and homogeneous third-grade fluid in
helical screw rheometer (HSR). UsingAdomiandecomposition method,
solutions are obtained for velocityprofiles in 𝑥-, 𝑧-directions and
also in the direction of the axisof the screw 𝑠(𝑦). The volume flow
rates are also calculatedby using the velocities in 𝑥, 𝑧 and in the
direction of the axisof the screw. Here we discussed the effect of
dimensionlessparameters ̃𝛽, 𝑈/𝑊 = − tan𝜙, 𝑃
,𝑥, and 𝑃
,𝑧where 𝜙 = 45∘,
on the velocity profiles given in (53), (54), and (56) with
the
0 0.2 0.4 0.6 0.8 10
1
2
3
4
�̃� = 0.9
�̃� = 0.7
�̃� = 0.5
�̃� = 0.3
�̃� = 0
𝑦
𝑤(𝑦)
Figure 3: Profile of the nondimensional velocity 𝑤(𝑦) for
differentvalues of ̃𝛽, keeping 𝑃
,𝑥= −2.0, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
0 0.2 0.4 0.6 0.8 10
1
2
3
4𝑠(𝑦)
𝑦
�̃� = 0.9
�̃� = 0.7
�̃� = 0.5
�̃� = 0.3
�̃� = 0
Figure 4: Profile of the nondimensional velocity 𝑠(𝑦) for
differentvalues of ̃𝛽, keeping 𝑃
,𝑥= −2.0, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
help of graphical representation. Figures 2, 3, and 4 for
thevelocities in𝑥-direction𝑢(𝑦), 𝑧-direction𝑤(𝑦), and the
resul-tant velocity 𝑠(𝑦) are plotted against 𝑦 for different values
ofnon-Newtonian parameter ̃𝛽 and constant pressure gradients𝑃
,𝑥= −2.0, 𝑃
,𝑧= −2.0, respectively. From these figures, it is
seen that the velocity profiles are strongly dependant on
thenon-Newtonian parameter ̃𝛽, as we increase the value of ̃𝛽 inthe
interval 0 to 0.9, the progressive increase in velocities in𝑥-,
𝑧-direction and in the direction of the axis of screw found.It is
worthwhile to note that the extrusion process increaseswith the
increase of the non-Newtonian parameter ̃𝛽.
Figures 5, 7, and 9 are sketched for the velocity profiles𝑢(𝑦),
𝑤(𝑦), and 𝑠(𝑦) against 𝑦 for different values of 𝑃
,𝑥,
keeping ̃𝛽 = 0.3 and 𝑃,𝑧= −2.0 fixed; enlightened escalation
-
8 Journal of Applied Mathematics
0 0.2 0.4 0.6 0.8 1
0
1
2
3
−1
𝑃,𝑥 = −4
𝑃,𝑥 = −3.5
𝑃,𝑥 = −3
𝑃,𝑥 = −2.5
𝑃,𝑥 = −2
𝑢(𝑦)
𝑦
Figure 5: Profile of the nondimensional velocity 𝑢(𝑦) for
differentvalues of 𝑃
,𝑥, keeping ̃𝛽 = 0.3, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
0 0.2 0.4 0.6 0.8 1
0
−1
−0.2
−0.6
−0.4
−0.8
𝑢(𝑦)
𝑦
𝑃,𝑧 = −4
𝑃,𝑧 = −3.5
𝑃,𝑧 = −3
𝑃,𝑧 = −2.5
𝑃,𝑧 = −2
Figure 6: Profile of the nondimensional velocity 𝑢(𝑦) for
differentvalues of 𝑃
,𝑧, keeping ̃𝛽 = 0.3, 𝑃
,𝑥= −2.0, and 𝜙 = 45∘.
is noted in the velocity profiles with increase in
pressuregradient in 𝑥-direction.
Figures 6, 8, and 10 are sketched for the velocity profiles𝑢(𝑦),
𝑤(𝑦), and 𝑠(𝑦) against 𝑦 for different values of 𝑃
,𝑧,
keeping ̃𝛽 = 0.3 and 𝑃,𝑥
= −2.0 fixed, it is observed thatparabolicity of the velocity
profiles increases with increase inpressure gradient in
𝑧-direction.
Figure 11 is plotted for the velocity 𝑠(𝑦) against 𝑦 for
dif-ferent values of 𝜙, keeping ̃𝛽 = 0.3,𝑃
,𝑥= −2.0, and𝑃
,𝑧= −2.0.
It is observed that flow increases as the flight angle
increasesup to 𝜙 = 45∘.
7. Conclusion
The steady flow of an isothermal, homogeneous and
incom-pressible third-grade fluid is investigated in helical
screw
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
𝑦
𝑃,𝑥 = −4
𝑃,𝑥 = −3.5
𝑃,𝑥 = −3
𝑃,𝑥 = −2.5
𝑃,𝑥 = −2
𝑤(𝑦)
Figure 7: Profile of the nondimensional velocity 𝑤(𝑦) for
differentvalues of 𝑃
,𝑥, keeping ̃𝛽 = 0.3, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
𝑤(𝑦)
0 0.2 0.4 0.6 0.8 10
1
2
3
4
𝑦
𝑃,𝑧 = −4
𝑃,𝑧 = −3.5
𝑃,𝑧 = −3𝑃,𝑧 = −2.5
𝑃,𝑧 = −2
Figure 8: Profile of the nondimensional velocity 𝑤(𝑦) for
differentvalues of 𝑃
,𝑧, keeping ̃𝛽 = 0.3, 𝑃
,𝑥= −2.0, and 𝜙 = 45∘.
rheometer (HSR). The geometry of the problem under
con-sideration gives second-order nonlinear coupled
differentialequations which are reduced to single differential
equationby using a transformation. Adomian decomposition methodis
used to obtain analytical expressions for the flow profiles,volume
flow rate. It is noticed that the zeroth componentsolution matches
with solution of the linearly viscous fluidin HSR, and it is also
found that the net velocity of the fluidis due to the pressure
gradient as the expression for the netvelocity is free from the
drag term. Graphical representationshows that the velocity profiles
are strongly dependant onnon-Newtonian parameter ( ̃𝛽) and pressure
gradients in 𝑥-and 𝑧-direction.Thus, the extrusion process strongly
dependson the involved parameters.
-
Journal of Applied Mathematics 9
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
𝑦
𝑃,𝑥 = −4
𝑃,𝑥 = −3.5
𝑃,𝑥 = −3
𝑃,𝑥 = −2.5
𝑃,𝑥 = −2
𝑠(𝑦)
Figure 9: Profile of the nondimensional velocity 𝑠(𝑦) for
differentvalues of 𝑃
,𝑥, keeping ̃𝛽 = 0.3, 𝑃
,𝑧= −2.0, and 𝜙 = 45∘.
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5
𝑦
𝑠(𝑦)
𝑃,𝑧 = −4
𝑃,𝑧 = −3.5
𝑃,𝑧 = −3
𝑃,𝑧 = −2.5
𝑃,𝑧 = −2
Figure 10: Profile of the nondimensional velocity 𝑠(𝑦) for
differentvalues of 𝑃
,𝑧, keeping ̃𝛽 = 0.3, 𝑃
,𝑥= −2.0, and 𝜙 = 45∘.
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
𝑦
𝑠(𝑦)
𝜙 = 20∘
𝜙 = 30∘
𝜙 = 45∘
Figure 11: Profile of the nondimensional velocity 𝑠(𝑦) for
differentvalues of 𝑃
,𝑧, keeping ̃𝛽 = 0.3, 𝑃
,𝑥= −2.0, and 𝜙 = 45∘.
Appendix
𝐿
11=
1
2
(𝑃
1+
3𝑈
2𝑃
1
𝑊
2−
3𝑈𝑃
2
1
𝑊
+
3𝑃
3
1
4
+
2𝑈𝑃
2
𝑊
− 2𝑃
1𝑃
2−
𝑈𝑃
2
2
𝑊
+
3
4
𝑃
1𝑃
2
2) ,
𝐿
12=
1
6
(
6𝑈𝑃
2
1
𝑊
− 3𝑃
3
1+ 4𝑃
1𝑃
2+
2𝑈𝑃
2
2
𝑊
− 3𝑃
1𝑃
2
2) ,
𝐿
13=
1
12
(3𝑃
3
1+ 3𝑃
1𝑃
2
2) ,
𝐿
14=
1
2
(𝑃
1+
9𝑈
4𝑃
1
𝑊
4+
10𝑈
2𝑃
1
𝑊
2−
27𝑈
3𝑃
2
1
𝑊
3
−
15𝑈𝑃
2
1
𝑊
+
13𝑃
3
1
3
+
21𝑈
2𝑃
3
1
𝑊
2
−
27𝑈𝑃
4
1
4𝑊
+
15𝑃
5
1
16
+
8𝑈
3𝑃
2
𝑊
3+
8𝑈𝑃
2
𝑊
− 10𝑃
1𝑃
2−
34𝑈
2𝑃
1𝑃
2
𝑊
2+
25𝑈𝑃
2
1𝑃
2
𝑊
−
16
3
𝑃
3
1𝑃
2−
5𝑈
3𝑃
2
2
𝑊
3−
17𝑈𝑃
2
2
𝑊
+
38
3
𝑃
1𝑃
2
2
+
38𝑈
2𝑃
1𝑃
2
2
3𝑊
2−
49𝑈𝑃
2
1𝑃
2
2
6𝑊
+
15
8
𝑃
3
1𝑃
2
2
+
25𝑈𝑃
3
2
3𝑊
−
16
3
𝑃
1𝑃
3
2−
17𝑈𝑃
4
2
12𝑊
+
15
16
𝑃
1𝑃
4
2) ,
𝐿
15=
1
6
(
54𝑈
3𝑃
2
1
𝑊
3+
30𝑈𝑃
2
1
𝑊
− 18𝑃
3
1
−
90𝑈
2𝑃
3
1
𝑊
2+
87𝑈𝑃
4
1
2𝑊
−
15𝑃
5
1
2
+
68𝑈
2𝑃
1𝑃
2
𝑊
2−
108𝑈𝑃
2
1𝑃
2
𝑊
+
104
3
𝑃
3
1𝑃
2
+
10𝑈
3𝑃
2
2
𝑊
3+
34𝑈𝑃
2
2
𝑊
− 54𝑃
1𝑃
2
2
−
54𝑈
2𝑃
1𝑃
2
2
𝑊
2+
157𝑈𝑃
2
1𝑃
2
2
3𝑊
− 15𝑃
3
1𝑃
2
2−
36𝑈𝑃
3
2
𝑊
+
104
3
𝑃
1𝑃
3
2+
53𝑈𝑃
4
2
6𝑊
−
15
2
𝑃
1𝑃
4
2+ 20𝑃
1𝑃
2) ,
𝐿
16=
1
12
(18𝑃
3
1+
90𝑈
2𝑃
3
1
𝑊
2−
90𝑈𝑃
4
1
𝑊
+
45𝑃
5
1
2
+
108𝑈𝑃
2
1𝑃
2
𝑊
− 72𝑃
3
1𝑃
2+ 54𝑃
1𝑃
2
2
-
10 Journal of Applied Mathematics
+
54𝑈
2𝑃
1𝑃
2
2
𝑊
2−
108𝑈𝑃
2
1𝑃
2
2
𝑊
+ 45𝑃
3
1𝑃
2
2+
36𝑈𝑃
3
2
𝑊
− 72𝑃
1𝑃
3
2−
18𝑈𝑃
4
2
𝑊
+
45
2
𝑃
1𝑃
4
2) ,
𝐿
17=
1
20
(
60𝑈𝑃
4
1
𝑊
− 30𝑃
5
1+ 48𝑃
3
1𝑃
2+
72𝑈𝑃
2
1𝑃
2
2
𝑊
− 60𝑃
3
1𝑃
2
2
+ 48𝑃
1𝑃
3
2+
12𝑈𝑃
4
2
𝑊
− 30𝑃
1𝑃
4
2) ,
𝐿
18=
1
30
(15𝑃
5
1+ 30𝑃
3
1𝑃
2
2+ 15𝑃
1𝑃
4
2) ,
𝑇
11=
1
2
(2
𝑈𝑃
1
𝑊
− 𝑃
2
1+ 3𝑃
2+
𝑈
2𝑃
2
𝑊
2
−2
𝑈𝑃
1𝑃
2
𝑊
+
3
4
𝑃
2
1𝑃
2− 3𝑃
2
2+
3
4
𝑃
3
2) ,
𝑇
12=
1
6
(2𝑃
2
1+ 4
𝑈𝑃
1𝑃
2
𝑊
− 3𝑃
2
1𝑃
2+ 6𝑃
2
2− 3𝑃
3
2) ,
𝑇
13=
1
12
(3𝑃
2
1𝑃
2+ 3𝑃
3
2) ,
𝑇
14=
1
2
(
8𝑈
3𝑃
1
𝑊
3+
8𝑈𝑃
1
𝑊
− 5𝑃
2
1−
17𝑈
2𝑃
2
1
𝑊
2
+
25𝑈𝑃
3
1
3𝑊
−
17𝑃
4
1
12
+ 9𝑃
2+
𝑈
4𝑃
2
𝑊
4
+
10𝑈
2𝑃
2
𝑊
2−
10𝑈
3𝑃
1𝑃
2
𝑊
3−
34𝑈𝑃
1𝑃
2
𝑊
+
38
3
𝑃
2
1𝑃
2+
38𝑈
2𝑃
2
1𝑃
2
3𝑊
2−
16𝑈𝑃
3
1𝑃
2
3𝑊
+
15
16
𝑃
4
1𝑃
2− 27𝑃
2
2−
15𝑈
2𝑃
2
2
𝑊
2+
25𝑈𝑃
1𝑃
2
2
𝑊
−
49
6
𝑃
2
1𝑃
2
2+ 21𝑃
3
2+
13𝑈
2𝑃
3
2
3𝑊
2
−
16𝑈𝑃
1𝑃
3
2
3𝑊
+
15
8
𝑃
2
1𝑃
3
2−
27𝑃
4
2
4
+
15𝑃
5
2
16
) ,
𝑇
15=
1
6
(10𝑃
2
1+
34𝑈
2𝑃
2
1
𝑊
2−
36𝑈𝑃
3
1
𝑊
+
53𝑃
4
1
6
+
20𝑈
3𝑃
1𝑃
2
𝑊
3+
68𝑈𝑃
1𝑃
2
𝑊
− 54𝑃
2
1𝑃
2
−
54𝑈
2𝑃
2
1𝑃
2
𝑊
2+
104𝑈𝑃
3
1𝑃
2
3𝑊
−
15
2
𝑃
4
1𝑃
2
+ 54𝑃
2
2+
30𝑈
2𝑃
2
2
𝑊
2−
108𝑈𝑃
1𝑃
2
2
𝑊
+
157
3
𝑃
2
1𝑃
2
2− 90𝑃
3
2−
18𝑈
2𝑃
3
2
𝑊
2
+
104𝑈𝑃
1𝑃
3
2
3𝑊
− 15𝑃
2
1𝑃
3
2+
87𝑃
4
2
2
−
15𝑃
5
2
2
) ,
(A.1)
𝑇
16=
1
12
(
36𝑈𝑃
3
1
𝑊
− 18𝑃
4
1+ 54𝑃
2
1𝑃
2+
54𝑈
2𝑃
2
1𝑃
2
𝑊
2
−
72𝑈𝑃
3
1𝑃
2
𝑊
+
45
2
𝑃
4
1𝑃
2
+
108𝑈𝑃
1𝑃
2
2
𝑊
− 108𝑃
2
1𝑃
2
2+ 90𝑃
3
2+
18𝑈
2𝑃
3
2
𝑊
2
−
72𝑈𝑃
1𝑃
3
2
𝑊
+ 45𝑃
2
1𝑃
3
2− 90𝑃
4
2+
45𝑃
5
2
2
) ,
𝑇
17=
1
20
(12𝑃
4
1+
48𝑈𝑃
3
1𝑃
2
𝑊
− 30𝑃
4
1𝑃
2+ 72𝑃
2
1𝑃
2
2
+
48𝑈𝑃
1𝑃
3
2
𝑊
− 60𝑃
2
1𝑃
3
2+ 60𝑃
4
2− 30𝑃
5
2) ,
𝑇
18=
1
30
(15𝑃
4
1𝑃
2+ 30𝑃
2
1𝑃
3
2+ 15𝑃
5
2) .
(A.2)
Acknowledgment
The first author is very thankful to Higher Education
Com-mission (HEC) of Pakistan for funding his higher studiesunder
the 5000 indigenous scholarship scheme Batch-IV.
References
[1] R. S. Rivlin and I. L. Erickson, “Stress deformation
relations forisotropicmaterials,” Journal of RationalMechanics and
Analysis,vol. 4, pp. 323–425, 1955.
[2] M. Alinia, D. D. Ganji, andM. Gorji-Bandpy, “Numerical
studyof mixed convection in an inclined two sided lid driven
cavityfilled with nanofluid using two-phase mixture model,”
Interna-tional Communications in Heat and Mass Transfer, vol. 38,
no.10, pp. 1428–1435, 2011.
[3] M. Sheikholeslami, M. Gorji-Bandpy, D. D. Ganji, S.
Soleimani,and S. M. Seyyedi, “Natural convection of nanofluids in
anenclosure between a circular and a sinusoidal cylinder in
thepresence of magnetic field,” International Communications inHeat
and Mass Transfer, vol. 39, no. 9, pp. 1435–1443, 2012.
[4] M. Sheikholeslami, M. Gorji-Bandpy, and D. D. Ganji,
“Mag-netic field effects on natural convection around a horizontal
cir-cular cylinder inside a square enclosure filled with
nanofluid,”International Communications in Heat and Mass Transfer,
vol.39, no. 7, pp. 978–986, 2012.
[5] D. D. Ganji, “A semi Analytical technique for non linear
settlingparticle equation of Motion,” Journal of Hydro
EnvironmentResearch, vol. 6, no. 4, pp. 323–327, 2012.
-
Journal of Applied Mathematics 11
[6] M. Sheikholeslami and D. D. Ganji, “Heat transfer of Cu
waternanofluid flow between parallel plates,” Powder Technology,
vol.235, pp. 873–879, 2013.
[7] S. M. Hamidi, Y. Rostamiyan, D. D. Ganji, and A. Fereidoon,
“Anovel and developed approximation for motion of a sphericalsolid
particle in plane coquette fluid flow,” Advanced PowederTecnology,
2013.
[8] A. H. Nayfeh, Introduction to Perturbation Techniques,
Wiley,New York, NY, USA, 1979.
[9] J. H. He, “Homotopy perturbation technique,” Computer
Meth-ods in Applied Mechanics and Engineering, vol. 178, no. 3-4,
pp.257–262, 1999.
[10] M. Grover andA. K. Tomer, “Comparison of optimal
homotopyasymptotic method with homotopy perturbation method
oftwelfth order boundary value problems,” International Journalon
Computer Science and Engineering, vol. 3, no. 7, pp. 2739–2747,
2011.
[11] J. H. He, “Asymptotology by homotopy perturbation
method,”Applied Mathematics and Computation, vol. 156, no. 3, pp.
591–596, 2004.
[12] G. Adomian, Stochastic Systems, Academic Press, Orlando,
Fla,USA, 1983.
[13] G. Adomian, Nonlinear Stochastic Operator Equations,
Aca-demic Press, Orlando, Fla, USA, 1986.
[14] A. M. Wazwaz, “A comparison between Adomian decomposi-tion
method and Taylor series method in the series solutions,”Applied
Mathematics and Computation, vol. 97, no. 1, pp. 37–44,1998.
[15] A. M. Wazwaz, “Analytical solution for the
time-dependentEmden-Fowler type of equations by Adomian
decompositionmethod,” Applied Mathematics and Computation, vol.
166, no.3, pp. 638–651, 2005.
[16] A. M. Siddiqui, M. Hameed, B. M. Siddiqui, and Q. K.
Ghori,“Use of Adomian decompositionmethod in the study of
parallelplate flow of a third grade fluid,” Communications in
NonlinearScience and Numerical Simulation, vol. 15, no. 9, pp.
2388–2399,2010.
[17] A. M. Wazwaz, Partial Differential Equations Methods
andApplications, A. A. Balkema, Tokyo, Japan, 2002.
[18] M. S. Tamura, J. M. Henderson, R. L. Powell, and C. F.
Shoe-maker, “Analysis of the helical screw rheometer for fluid
food,”Journal of Food Process Engineering, vol. 16, no. 2, pp.
93–126,1993.
[19] A. M. Siddiqui, T. Haroon, and S. Irum, “Torsional flow of
thirdgrade fluid using modified homotopy perturbation
method,”Computers & Mathematics with Applications, vol. 58, no.
11-12,pp. 2274–2285, 2009.
[20] R. V. Chiruvella, Y. Jaluria, V. Sernas, and M. Esseghir,
“Extru-sion of non-Newtonian fluids in a single-screw extruder
withpressure back flow,” Polymer Engineering and Science, vol.
36,no. 3, pp. 358–367, 1996.
[21] M. A. Rao, “Rheology of liquid foods: a review,” Journal of
Tex-ture Studies, vol. 8, no. 2, pp. 135–168, 1977.
[22] P. J. Tily, “Viscosity measurement (part 2),” Measurement
andControl, vol. 16, no. 4, pp. 137–139, 1983.
[23] R. B. Bird, R. C. Armstrong, and O. Hassager,
“Enhancementof axial annular flow by rottaing inner cylinder,” in
Dynamicsof Ploymeric Liquids, Fluid Mechanics, vol. 1, pp. 184–187,
Wiley,New York, NY, USA, 1987.
[24] W. D. Mohr and R. S. Mallouk, “Power requirement and
pres-sure distribution of fluid in a screw extruder,” Industrial
andEngineering Chemistry, vol. 51, no. 6, pp. 765–770, 1959.
[25] G. Adomian and R. Rach, “On the solution of algebraic
equa-tions by the decomposition method,” Journal of
MathematicalAnalysis and Applications, vol. 105, no. 1, pp.
141–166, 1985.
[26] G. Adomian, “Convergent series solution of nonlinear
equa-tions,” Journal of Computational and Applied Mathematics,
vol.11, no. 2, pp. 225–230, 1984.
[27] G. Adomian, “A review of the decompositionmethod in
appliedmathematics,” Journal of Mathematical Analysis and
Applica-tions, vol. 135, no. 2, pp. 501–544, 1988.
-
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Probability and StatisticsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
CombinatoricsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical
Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
The Scientific World JournalHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014
Stochastic AnalysisInternational Journal of