Embed Size (px)
Citation preview

Research ArticleA Tool for Beamforming and Real-Time Link Budget Analysis inAeronautical Communications Using Kinematics
M Cenk Erturk12 and Yasin Aksan13
1Meteksan Defense Inc Ankara Turkey2Department of Electrical Engineering University of South Florida Tampa FL 33620 USA3Department of Electrical amp Electronics Engineering TOBB University of Economics amp Technology Ankara Turkey
Correspondence should be addressed to M Cenk Erturk certurkmeteksancom
Received 31 March 2016 Revised 15 June 2016 Accepted 10 July 2016
Academic Editor Fun Hu
Copyright copy 2016 M C Erturk and Y Aksan This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Aeronautical Communication (AC) systems are likely to be a part of future tiered communication network structures Thereforemaintaining a robustAC linkwith aminimumpower burden on the host platformhas a critical importance In this paper we analyzethe AC systems from a link budget analysis point of view and define the requirements for the parameters of link budget with anemphasize on antenna gains First we study the link budget analysis in an AC systemThen we present a mathematical frameworkto provide an end-to-end link budget analysis utilizing the platform kinematics Finally we present the numerical results for typicalAC scenarios and discuss that these results can be used for calculating the real-time link budget and electronic beamforming toprovide a robust link
1 Introduction and Motivation
Aeronautical communications (AC) is an emerging areain which aeronautical platforms are considered as a partof the multitier network for future wireless communica-tion systems Programs led by the National Aeronauticsand Space Administration (NASA) the Federal AviationAdministration (FAA) and EUROCONTROL all includethe aeronautical platforms as part of the multitier network[1 2] The driving reasons for development of high datarate AC systems are as follows (1) the increase in datademand for Air Traffic Control and Air Traffic Managementdue to the growth in air transportation [3] (2) the needfor low latency and low cost services to provide in-flightmultimedia access [4] (3) the potential to use AC systemsas a backbone for terrestrial communication networks [5]and (4) the exponential increase in the number of unmannedair vehicles in both civil and military domains [6] ACsystems can provide service for ground networks publicsafety military communications and improved cockpit datacommunications
Data hungry high speed nodes with longer communica-tion distances bring new research dimensions for the futurecommunication systems in aeronautical domain First ofall power efficiency and spectral efficiency are not usuallyequally important in aeronautical communication systemsas in terrestrial communications As the communicationzones are larger in AC systems in order to achieve longerdistances power is considered to bemuchmore precious thanbandwidth Moreover in aeronautical stations power mustbe rigorously conserved since all of it is made on-board andmust be shared among many power hungry systems [7]
It is important to note that in order to achieve higher datarates to meet the requirements of improved avionic systemsit is desirable to transmit as much data as possible in theavailable bandwidth Ideally one would also like to use thesmallest possible bandwidth to transmit the data that is byincreasing the spectral efficiency In the terrestrial domainlicenses for wireless bandwidth are becoming increasinglyscarce and expensive To the best of our knowledge abandwidth regulation in aeronautical domain is not as strictas terrestrial domain yet However using less bandwidth
Hindawi Publishing CorporationInternational Journal of Aerospace EngineeringVolume 2016 Article ID 9153240 11 pageshttpdxdoiorg10115520169153240
2 International Journal of Aerospace Engineering
0 5 10 15 20 25
120578(s
pect
ral e
ffici
ency
)
101
100
10minus1minus5
EbN0 (dB)
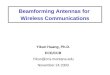
Figure 1 Capacity curve limit of (119864b1198730)dBReqCoded
reduces licensing costs and enables more nodes to sharea given frequency band therefore always desirable Asopposed to above it is vital to note that in militarycivildomain increasing the spectral efficiency is not desirablefrom an electronic warfarerobustness to interference pointof view [8] Moreover reducing the spectral efficiency alsoenables longer distance communications by further reducingthe required energy per bit according to Shannon (seeFigure 1)
One of the most important issues on link budget analysisinACdomain is the antenna gains Having a directed antennawith high gains reduces the delayDoppler spread [9 10] aswell as reducing the transmit power of the AC system [11]As the AC platform moves the platform heading may shift(yaw) and the platform may tilt along the length (pitch) orfrom side to side (roll) [12] Hence the antenna beamformingprocessing (mechanical or electronic) unit must rapidlycompensate for the disturbances caused by the changes inyaw pitch and roll to maintain the link budget This issue isrelated to the positions of the platforms Euler angles of theplatforms (yaw pitch and roll) and antenna gains [13]
Among all these (somewhat) contradicting requirementsanalysis of an AC link budget becomes a critical importanceThis paper analyze theAC systems from a link budget analysispoint of view and define the requirements for the parametersof link budget with an emphasize on antenna gains Theserequirements provide the basis for a robust AC link Wepresent a mathematical framework to provide an end-to-endlink budget analysis utilizing the platform kinematics Kine-matics link budget and antenna gains are well investigatedand understood in aeronautical [12] communications [14]and antenna engineering [8] domains separately however tothe best of our knowledge a study of link budget emphasizingthe effect of kinematics has not been done that is the linkbudget calculations generally assume static antenna gain [15]The contribution of themathematical framework provided inthis study is twofold (1) A real-time link budget analysis canbe realized for AC system which depends on AC platforms
positions and Euler angles Given the telemetry data or flightplans of AC systems thismathematical framework provides arun-time link budget analysisThis can be used to increase theperformance of the AC systems in terms of data rates powerconsumption link margin and so forth (2) Mathematicalframework of mapping the AC platform positions and Eulerdata to the platform antenna angles can be used for electronicbeamforming andor mechanical beam steering algorithmswhich also provide a performance increase in AC systemsin terms of link budget with increased gains andor Dopplermitigation
The rest of this paper is organized as follows In Section 2we present the system model for the analysis of link budgetin AC systems and investigate the mathematical theory forthe boundaries In Section 3 we provide a tool to understandthe kinematics of platforms and their effect on antennagainslink margin as well as a mathematical background forthe beamforming In Section 4 the effectiveness of the tool isshowed by numerical analysis followed by the conclusions inSection 5
2 System Model for theAnalysis of Link Budget in AeronauticalCommunication Systems
Received power at the input of the receiver chain in an aero-nautical point-to-point communication link can be writtenas
119875r =119875t119866t119866r
119871backoff119871 tx119871 rx119871 rain119871atm119871 stat119871pol119871 fs (1)
where 119875t is maximum output power of power amplifier (PA)119866t is transmit antenna gain 119866r is receiver antenna gain119871backoff is back-off value 119871 tx is transmitter losses between PAand antenna 119871 rx is receiver losses between antenna and lownoise amplifier (LNA) 119871 rain is rain losses 119871atm is atmosphericlosses 119871 stat is statistical losses due to multipath environment119871pol is polarization losses 119871 fs is free space path loss 119871 fs =(4120587119889120582)2 120582 is wavelength 120582 = 119888119891c 119888 = 3 times 10
8ms 119891c iscarrier frequency and 119889 is distance between transmitter ACand receiver AC
Therefore received energy per symbol over power spec-tral density of noise can be written as
(119864s1198730
)Rec=
119875r1198730119873F119877s119868loss
(2)
where 119864s is energy of symbol 1198730is power spectral density
of noise minus174 dBmHz 1198730= 1205811198790 120581 is Boltzmann constant
120581 = 138 times 1023 1198790 is reference noise temperature (Kelvin)119873F is noise figure of the receiver AC 119877s is symbol rate119882 isbandwidth and 119868loss is implementation losses
By using (1) and (2) one can find (119864s1198730)dBRec = 10 times
log10(119864s1198730)RecTherefore calculating the linkmargin will be
as follows
LMdB= (
119864s1198730
)
dB
Recminus (
119864s1198730
)
dB
Req (3)
International Journal of Aerospace Engineering 3
where (119864s1198730)dBReq is the value corresponding to required
energy of symbol over power spectral density of noise in orderto ensure the bit error rate (BER) performance say 119875b
(119864s1198730
)
dB
Req= (
119864b1198730
)
dB
ReqCoded+ 10 times log
10119896 (4)
where 119896 is the information bit per symbol The value of 119896 canbe given as
119896 = 119903119898 (5)
where 119903 is the coding rate and 119898 = log2119872 119872 is the
modulation order For a given modulation order and codingrate one can find the value 119896 using (5) In order to calculate(119864s1198730)
dBReq in (4) and LMdB in (3) we have to calculate
(119864b1198730)dBReqCoded
An important theoretical result from communicationtheory [16] called Shannonrsquos Formula gives the theoreticalmaximum data rate that can be reliably transmitted overan additive white Gaussian noise (AWGN) channel withbandwidth (Hz) received power (watts) and noise PSD 119873
0
(wattsHz)
119862 = 119882log2(1 +
119875r1198730119882) (6)
Any reliable communication system must have a bit ratethat is less than or equal to 119862 which is called the capacity ofthe channel Spectral efficiency of a waveform is given by 120578 =119877b119882 119877b = 119896119877s where 119896 is given in (5) and power efficiencyis measured by 119864b1198730 Using these relationships and (6) wehave
120578 = log2(1 +
119864b1198730
120578) (7)
or
(119864b1198730
)
dB
ReqCodedge2120578 minus 1
120578 (8)
In a wireless communication system symbol rate 119877s is cal-culated according to the digital-to-analoganalog-to-digitalconverter (DACADC) speed (including oversampling) and119877b useful information bit rate Bandwidth of the signal119882 isgenerally given for a system due to regulations or in somecases might be restricted due to RF hardware Anyhow agivenselected 120578 = 119877b119882 determines (119864b1198730)
dBReqCoded
Note that (8) provides a lower bound on for each valueof (119864b1198730)
dBReqCoded However this tradeoff between (119864b
1198730)dBReqCoded and 120578 has a limit No matter how much band-
width you allow a signal to have you can never use (119864b1198730)dB lt minus159 dB and still have reliable communication (see
Figure 1)Power and bandwidth are not usually equally important
in aeronautical communication system As the communica-tion zones are larger in AC systems in order to achieve longerdistances power is considered to be much more precious
than bandwidth Moreover in aeronautical stations powermust be rigorously conserved since all of it is made on-boardand must be shared among many power hungry systemsFinally it is important to note that increasing the bandwidthefficiency is not desirable from an interference mitigationpoint of view Therefore from an aeronautical communica-tion system design point of view small (119864b1198730)
dBReqCoded is
desirable (which means going left in Figure 1) in order toincrease the LM as given in (3) On the other hand for agiven LM lower (119864b1198730)
dBReqCoded is desirable because it will
let the system achieve the same BER performance with lowertransmitting powers
3 TransmitReceive AntennaAngles and Beamforming
As discussed in the previous section parameters that affectthe AC system link budget can be summarized as followsoutput power of PA back-off value transmit and receiveantenna gains transmitterreceiver side losses rain lossesatmospheric losses statistical losses due to multipath polar-ization losses carrier frequencies communication distancesdata rates bandwidth and noise figure In order to providea careful and robust system design all the above param-eters as well as the relationship between them should bestudied in detail Even though most of these parametersare selecteddictated by the researcherssystem requirementsintegration relatedmultidisciplinary subjects can be analyzedseparately In this section we investigate the antenna gainsaccording to the kinematics of platforms In particular weprovide a mathematical tool for analyzing the transmitterand receiver antenna gains according to the positions of theplatforms Euler angles of the platforms (yaw pitch and roll)and antenna gain patterns
The antenna gain pattern has a critical importance insystem design In AC systems link margin can be increased(or the overall power consumption can be decreased) witha careful design of antenna pattern A directivity can beplaced by electronic beamforming andor mechanical beamsteering according to positions and Euler angles of theaeronautical platforms This directivity will provide a highertransmitter and receiver antenna gain between platformsline-of-sight (LOS) and therefore can provide a robust ACsystem link budget with additional link margins The rela-tionship between increasing the transmitter andor receiverantenna gain and link budget can be summarized as followsincreasing transmitter antenna gain (119866t) andor receiverantenna gain (119866r) increase the received power (119875r) in (1)therefore also increasing the received energy per symbol overpower spectral density of noise (119864s1198730)Rec in (2)Thatmeanscareful design of antenna pattern utilizing the positions andEuler angles of the platforms yield increased (119864s1198730)Recwhich increase the linkmargin (LMdB) according to (3)Thustracking the positions and Euler angles of the platforms canincrease the system performance from a link budget pointof view Moreover it can provide transmission security andadditional navigational reference to AC systems
4 International Journal of Aerospace Engineering
z‐axis
z‐axis
y‐axis
y‐axis
x‐axis
x‐axis
x‐axis
[0 180∘][0 359∘]
120601
(cut angle)
120579 isin120601 isin
120579
Figure 2 Antenna pattern angle definitions
Although it is very well understoodstudied in literaturein different domains a joint mathematical tool for bothantenna engineers and aeronautical engineers could providea complete understanding of system design Therefore it isimportant to provide a basis to the antenna pattern angledefinitions and aeronautical platform Euler angle definitionsas in Figures 2 and 3 respectively
Using the platformpositions in Figures 4 and 5 and Euler-angle definitions we study the LOS antenna angles for twoplatforms (The rest of the paper will provide a formulationfor two aeronautical platforms However the mathematicaltools provided in this paper can be used for an aeronautical-ground communication scenario st a fixed platform withfixed Euler angles can be used for any of the platforms)In this section we first present the antenna angles for twoplatforms only based on positions By using those results weadd the Euler angles to the formulations in order to providea complete solution
31 LOS Antenna Angles Based on Aeronautical PlatformPositions Let (119909
1 1199101 1199111) and (119909
2 1199102 1199112) denote the aeronau-
tical platform 1 (AP1) and AP2 positions respectively Alsoconsider that (pitch
1 roll1 yaw1) and (pitch
2 roll2 yaw2)
present the Euler angles for AP1 and AP2 The LOS antenna(120579119894000
119894 = 1 2) angles for AP1 and AP2 in the absence of
Euler angles (ie (pitch1 roll1 yaw1) = (0 0 0)) can be given
as
1205791000
=
tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 ge 0
120587 + tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 lt 0
1205792000
= 120587 minus 1205791000
(9)
where Δ119909 = 1199092minus 1199091 Δ119910 = 119910
2minus 1199101 and Δ119911 = 119911
2minus 1199111 On the
other hand the LOS antenna (120601119894000
119894 = 1 2) angles for AP1and AP2 values can be calculated as
1206011000
=
tanminus1 (Δ119910
Δ119909) if Δ119909 ge 0 Δ119910 ge 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 lt 0 Δ119910 gt 0
2120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 gt 0 Δ119910 lt 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 le 0 Δ119910 le 0
1206012000
=
1206011000
+ 120587 Δ119910 ge 0
1206011000
minus 120587 Δ119910 lt 0
(10)
International Journal of Aerospace Engineering 5
z‐axis y‐axis
x‐axis x‐axis
Pitch isin [+90∘ minus90∘] Roll isin [+180∘ minus180∘] Yaw isin [+180∘ minus180∘]
Pitch = +45∘
Pitch = 0∘
Pitch = minus45∘
Pitch = minus90∘
Pitch = +90∘
Roll = +135∘
Roll = +90∘
Roll = +45∘
Roll = 0∘
Roll = minus45∘
Roll = minus90∘
Roll = minus135∘
Roll = minus180∘
Roll = +180∘
Yaw = +180∘
Yaw = +135∘
Yaw = +90∘
Yaw = +45∘
Yaw = 0∘
Yaw = minus45∘
Yaw = minus90∘
Yaw = minus135∘
Yaw = minus180∘
Figure 3 Aeronautical platform Euler angle definitions
Note that (9)-(10) provide the AP1 and the AP2 LOSangles in the absence of pitch roll and yaw angles Howeverthey will be used as the initial values for the rest of thepaper
32 LOS Antenna Angles Based on Aeronautical PlatformPositions and Euler Angles In this section we first study theeffect of yaw
119894 119894 = 1 2 then pitch
119894 119894 = 1 2 and finally roll
119894
119894 = 1 2 on the antenna angles Firstly we investigate the effectof platform yaw movement on the antenna angles yaw
119894does
not have any effect on 120579119894000
that is 120579119894yaw11989400= 120579119894000
On theother hand the effect of yaw
119894on 120601119894000
can be given as
120601119894yaw11989400=
120572119894yaw11989400 if 0 le 120572
119894yaw11989400lt 2120587
120572119894yaw11989400minus 2120587 if 2120587 le 120572
119894yaw11989400
120572119894yaw11989400+ 2120587 if 120572
119894yaw11989400lt 0
(11)
where 120572119894yaw11989400= 120601119894000
+ yaw119894
After calculating 120579119894yaw11989400
and 120601119894yaw11989400
according to theyaw values of AP119894 119894 = 1 2 we may calculate 120579
119894yaw119894pitch1198940and
6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
0 5 10 15 20 25
120578(s
pect
ral e
ffici
ency
)
101
100
10minus1minus5
EbN0 (dB)
Figure 1 Capacity curve limit of (119864b1198730)dBReqCoded
reduces licensing costs and enables more nodes to sharea given frequency band therefore always desirable Asopposed to above it is vital to note that in militarycivildomain increasing the spectral efficiency is not desirablefrom an electronic warfarerobustness to interference pointof view [8] Moreover reducing the spectral efficiency alsoenables longer distance communications by further reducingthe required energy per bit according to Shannon (seeFigure 1)
One of the most important issues on link budget analysisinACdomain is the antenna gains Having a directed antennawith high gains reduces the delayDoppler spread [9 10] aswell as reducing the transmit power of the AC system [11]As the AC platform moves the platform heading may shift(yaw) and the platform may tilt along the length (pitch) orfrom side to side (roll) [12] Hence the antenna beamformingprocessing (mechanical or electronic) unit must rapidlycompensate for the disturbances caused by the changes inyaw pitch and roll to maintain the link budget This issue isrelated to the positions of the platforms Euler angles of theplatforms (yaw pitch and roll) and antenna gains [13]
Among all these (somewhat) contradicting requirementsanalysis of an AC link budget becomes a critical importanceThis paper analyze theAC systems from a link budget analysispoint of view and define the requirements for the parametersof link budget with an emphasize on antenna gains Theserequirements provide the basis for a robust AC link Wepresent a mathematical framework to provide an end-to-endlink budget analysis utilizing the platform kinematics Kine-matics link budget and antenna gains are well investigatedand understood in aeronautical [12] communications [14]and antenna engineering [8] domains separately however tothe best of our knowledge a study of link budget emphasizingthe effect of kinematics has not been done that is the linkbudget calculations generally assume static antenna gain [15]The contribution of themathematical framework provided inthis study is twofold (1) A real-time link budget analysis canbe realized for AC system which depends on AC platforms
positions and Euler angles Given the telemetry data or flightplans of AC systems thismathematical framework provides arun-time link budget analysisThis can be used to increase theperformance of the AC systems in terms of data rates powerconsumption link margin and so forth (2) Mathematicalframework of mapping the AC platform positions and Eulerdata to the platform antenna angles can be used for electronicbeamforming andor mechanical beam steering algorithmswhich also provide a performance increase in AC systemsin terms of link budget with increased gains andor Dopplermitigation
The rest of this paper is organized as follows In Section 2we present the system model for the analysis of link budgetin AC systems and investigate the mathematical theory forthe boundaries In Section 3 we provide a tool to understandthe kinematics of platforms and their effect on antennagainslink margin as well as a mathematical background forthe beamforming In Section 4 the effectiveness of the tool isshowed by numerical analysis followed by the conclusions inSection 5
2 System Model for theAnalysis of Link Budget in AeronauticalCommunication Systems
Received power at the input of the receiver chain in an aero-nautical point-to-point communication link can be writtenas
119875r =119875t119866t119866r
119871backoff119871 tx119871 rx119871 rain119871atm119871 stat119871pol119871 fs (1)
where 119875t is maximum output power of power amplifier (PA)119866t is transmit antenna gain 119866r is receiver antenna gain119871backoff is back-off value 119871 tx is transmitter losses between PAand antenna 119871 rx is receiver losses between antenna and lownoise amplifier (LNA) 119871 rain is rain losses 119871atm is atmosphericlosses 119871 stat is statistical losses due to multipath environment119871pol is polarization losses 119871 fs is free space path loss 119871 fs =(4120587119889120582)2 120582 is wavelength 120582 = 119888119891c 119888 = 3 times 10
8ms 119891c iscarrier frequency and 119889 is distance between transmitter ACand receiver AC
Therefore received energy per symbol over power spec-tral density of noise can be written as
(119864s1198730
)Rec=
119875r1198730119873F119877s119868loss
(2)
where 119864s is energy of symbol 1198730is power spectral density
of noise minus174 dBmHz 1198730= 1205811198790 120581 is Boltzmann constant
120581 = 138 times 1023 1198790 is reference noise temperature (Kelvin)119873F is noise figure of the receiver AC 119877s is symbol rate119882 isbandwidth and 119868loss is implementation losses
By using (1) and (2) one can find (119864s1198730)dBRec = 10 times
log10(119864s1198730)RecTherefore calculating the linkmargin will be
as follows
LMdB= (
119864s1198730
)
dB
Recminus (
119864s1198730
)
dB
Req (3)
International Journal of Aerospace Engineering 3
where (119864s1198730)dBReq is the value corresponding to required
energy of symbol over power spectral density of noise in orderto ensure the bit error rate (BER) performance say 119875b
(119864s1198730
)
dB
Req= (
119864b1198730
)
dB
ReqCoded+ 10 times log
10119896 (4)
where 119896 is the information bit per symbol The value of 119896 canbe given as
119896 = 119903119898 (5)
where 119903 is the coding rate and 119898 = log2119872 119872 is the
modulation order For a given modulation order and codingrate one can find the value 119896 using (5) In order to calculate(119864s1198730)
dBReq in (4) and LMdB in (3) we have to calculate
(119864b1198730)dBReqCoded
An important theoretical result from communicationtheory [16] called Shannonrsquos Formula gives the theoreticalmaximum data rate that can be reliably transmitted overan additive white Gaussian noise (AWGN) channel withbandwidth (Hz) received power (watts) and noise PSD 119873
0
(wattsHz)
119862 = 119882log2(1 +
119875r1198730119882) (6)
Any reliable communication system must have a bit ratethat is less than or equal to 119862 which is called the capacity ofthe channel Spectral efficiency of a waveform is given by 120578 =119877b119882 119877b = 119896119877s where 119896 is given in (5) and power efficiencyis measured by 119864b1198730 Using these relationships and (6) wehave
120578 = log2(1 +
119864b1198730
120578) (7)
or
(119864b1198730
)
dB
ReqCodedge2120578 minus 1
120578 (8)
In a wireless communication system symbol rate 119877s is cal-culated according to the digital-to-analoganalog-to-digitalconverter (DACADC) speed (including oversampling) and119877b useful information bit rate Bandwidth of the signal119882 isgenerally given for a system due to regulations or in somecases might be restricted due to RF hardware Anyhow agivenselected 120578 = 119877b119882 determines (119864b1198730)
dBReqCoded
Note that (8) provides a lower bound on for each valueof (119864b1198730)
dBReqCoded However this tradeoff between (119864b
1198730)dBReqCoded and 120578 has a limit No matter how much band-
width you allow a signal to have you can never use (119864b1198730)dB lt minus159 dB and still have reliable communication (see
Figure 1)Power and bandwidth are not usually equally important
in aeronautical communication system As the communica-tion zones are larger in AC systems in order to achieve longerdistances power is considered to be much more precious
than bandwidth Moreover in aeronautical stations powermust be rigorously conserved since all of it is made on-boardand must be shared among many power hungry systemsFinally it is important to note that increasing the bandwidthefficiency is not desirable from an interference mitigationpoint of view Therefore from an aeronautical communica-tion system design point of view small (119864b1198730)
dBReqCoded is
desirable (which means going left in Figure 1) in order toincrease the LM as given in (3) On the other hand for agiven LM lower (119864b1198730)
dBReqCoded is desirable because it will
let the system achieve the same BER performance with lowertransmitting powers
3 TransmitReceive AntennaAngles and Beamforming
As discussed in the previous section parameters that affectthe AC system link budget can be summarized as followsoutput power of PA back-off value transmit and receiveantenna gains transmitterreceiver side losses rain lossesatmospheric losses statistical losses due to multipath polar-ization losses carrier frequencies communication distancesdata rates bandwidth and noise figure In order to providea careful and robust system design all the above param-eters as well as the relationship between them should bestudied in detail Even though most of these parametersare selecteddictated by the researcherssystem requirementsintegration relatedmultidisciplinary subjects can be analyzedseparately In this section we investigate the antenna gainsaccording to the kinematics of platforms In particular weprovide a mathematical tool for analyzing the transmitterand receiver antenna gains according to the positions of theplatforms Euler angles of the platforms (yaw pitch and roll)and antenna gain patterns
The antenna gain pattern has a critical importance insystem design In AC systems link margin can be increased(or the overall power consumption can be decreased) witha careful design of antenna pattern A directivity can beplaced by electronic beamforming andor mechanical beamsteering according to positions and Euler angles of theaeronautical platforms This directivity will provide a highertransmitter and receiver antenna gain between platformsline-of-sight (LOS) and therefore can provide a robust ACsystem link budget with additional link margins The rela-tionship between increasing the transmitter andor receiverantenna gain and link budget can be summarized as followsincreasing transmitter antenna gain (119866t) andor receiverantenna gain (119866r) increase the received power (119875r) in (1)therefore also increasing the received energy per symbol overpower spectral density of noise (119864s1198730)Rec in (2)Thatmeanscareful design of antenna pattern utilizing the positions andEuler angles of the platforms yield increased (119864s1198730)Recwhich increase the linkmargin (LMdB) according to (3)Thustracking the positions and Euler angles of the platforms canincrease the system performance from a link budget pointof view Moreover it can provide transmission security andadditional navigational reference to AC systems
4 International Journal of Aerospace Engineering
z‐axis
z‐axis
y‐axis
y‐axis
x‐axis
x‐axis
x‐axis
[0 180∘][0 359∘]
120601
(cut angle)
120579 isin120601 isin
120579
Figure 2 Antenna pattern angle definitions
Although it is very well understoodstudied in literaturein different domains a joint mathematical tool for bothantenna engineers and aeronautical engineers could providea complete understanding of system design Therefore it isimportant to provide a basis to the antenna pattern angledefinitions and aeronautical platform Euler angle definitionsas in Figures 2 and 3 respectively
Using the platformpositions in Figures 4 and 5 and Euler-angle definitions we study the LOS antenna angles for twoplatforms (The rest of the paper will provide a formulationfor two aeronautical platforms However the mathematicaltools provided in this paper can be used for an aeronautical-ground communication scenario st a fixed platform withfixed Euler angles can be used for any of the platforms)In this section we first present the antenna angles for twoplatforms only based on positions By using those results weadd the Euler angles to the formulations in order to providea complete solution
31 LOS Antenna Angles Based on Aeronautical PlatformPositions Let (119909
1 1199101 1199111) and (119909
2 1199102 1199112) denote the aeronau-
tical platform 1 (AP1) and AP2 positions respectively Alsoconsider that (pitch
1 roll1 yaw1) and (pitch
2 roll2 yaw2)
present the Euler angles for AP1 and AP2 The LOS antenna(120579119894000
119894 = 1 2) angles for AP1 and AP2 in the absence of
Euler angles (ie (pitch1 roll1 yaw1) = (0 0 0)) can be given
as
1205791000
=
tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 ge 0
120587 + tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 lt 0
1205792000
= 120587 minus 1205791000
(9)
where Δ119909 = 1199092minus 1199091 Δ119910 = 119910
2minus 1199101 and Δ119911 = 119911
2minus 1199111 On the
other hand the LOS antenna (120601119894000
119894 = 1 2) angles for AP1and AP2 values can be calculated as
1206011000
=
tanminus1 (Δ119910
Δ119909) if Δ119909 ge 0 Δ119910 ge 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 lt 0 Δ119910 gt 0
2120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 gt 0 Δ119910 lt 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 le 0 Δ119910 le 0
1206012000
=
1206011000
+ 120587 Δ119910 ge 0
1206011000
minus 120587 Δ119910 lt 0
(10)
International Journal of Aerospace Engineering 5
z‐axis y‐axis
x‐axis x‐axis
Pitch isin [+90∘ minus90∘] Roll isin [+180∘ minus180∘] Yaw isin [+180∘ minus180∘]
Pitch = +45∘
Pitch = 0∘
Pitch = minus45∘
Pitch = minus90∘
Pitch = +90∘
Roll = +135∘
Roll = +90∘
Roll = +45∘
Roll = 0∘
Roll = minus45∘
Roll = minus90∘
Roll = minus135∘
Roll = minus180∘
Roll = +180∘
Yaw = +180∘
Yaw = +135∘
Yaw = +90∘
Yaw = +45∘
Yaw = 0∘
Yaw = minus45∘
Yaw = minus90∘
Yaw = minus135∘
Yaw = minus180∘
Figure 3 Aeronautical platform Euler angle definitions
Note that (9)-(10) provide the AP1 and the AP2 LOSangles in the absence of pitch roll and yaw angles Howeverthey will be used as the initial values for the rest of thepaper
32 LOS Antenna Angles Based on Aeronautical PlatformPositions and Euler Angles In this section we first study theeffect of yaw
119894 119894 = 1 2 then pitch
119894 119894 = 1 2 and finally roll
119894
119894 = 1 2 on the antenna angles Firstly we investigate the effectof platform yaw movement on the antenna angles yaw
119894does
not have any effect on 120579119894000
that is 120579119894yaw11989400= 120579119894000
On theother hand the effect of yaw
119894on 120601119894000
can be given as
120601119894yaw11989400=
120572119894yaw11989400 if 0 le 120572
119894yaw11989400lt 2120587
120572119894yaw11989400minus 2120587 if 2120587 le 120572
119894yaw11989400
120572119894yaw11989400+ 2120587 if 120572
119894yaw11989400lt 0
(11)
where 120572119894yaw11989400= 120601119894000
+ yaw119894
After calculating 120579119894yaw11989400
and 120601119894yaw11989400
according to theyaw values of AP119894 119894 = 1 2 we may calculate 120579
119894yaw119894pitch1198940and
6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
where (119864s1198730)dBReq is the value corresponding to required
energy of symbol over power spectral density of noise in orderto ensure the bit error rate (BER) performance say 119875b
(119864s1198730
)
dB
Req= (
119864b1198730
)
dB
ReqCoded+ 10 times log
10119896 (4)
where 119896 is the information bit per symbol The value of 119896 canbe given as
119896 = 119903119898 (5)
where 119903 is the coding rate and 119898 = log2119872 119872 is the
modulation order For a given modulation order and codingrate one can find the value 119896 using (5) In order to calculate(119864s1198730)
dBReq in (4) and LMdB in (3) we have to calculate
(119864b1198730)dBReqCoded
An important theoretical result from communicationtheory [16] called Shannonrsquos Formula gives the theoreticalmaximum data rate that can be reliably transmitted overan additive white Gaussian noise (AWGN) channel withbandwidth (Hz) received power (watts) and noise PSD 119873
0
(wattsHz)
119862 = 119882log2(1 +
119875r1198730119882) (6)
Any reliable communication system must have a bit ratethat is less than or equal to 119862 which is called the capacity ofthe channel Spectral efficiency of a waveform is given by 120578 =119877b119882 119877b = 119896119877s where 119896 is given in (5) and power efficiencyis measured by 119864b1198730 Using these relationships and (6) wehave
120578 = log2(1 +
119864b1198730
120578) (7)
or
(119864b1198730
)
dB
ReqCodedge2120578 minus 1
120578 (8)
In a wireless communication system symbol rate 119877s is cal-culated according to the digital-to-analoganalog-to-digitalconverter (DACADC) speed (including oversampling) and119877b useful information bit rate Bandwidth of the signal119882 isgenerally given for a system due to regulations or in somecases might be restricted due to RF hardware Anyhow agivenselected 120578 = 119877b119882 determines (119864b1198730)
dBReqCoded
Note that (8) provides a lower bound on for each valueof (119864b1198730)
dBReqCoded However this tradeoff between (119864b
1198730)dBReqCoded and 120578 has a limit No matter how much band-
width you allow a signal to have you can never use (119864b1198730)dB lt minus159 dB and still have reliable communication (see
Figure 1)Power and bandwidth are not usually equally important
in aeronautical communication system As the communica-tion zones are larger in AC systems in order to achieve longerdistances power is considered to be much more precious
than bandwidth Moreover in aeronautical stations powermust be rigorously conserved since all of it is made on-boardand must be shared among many power hungry systemsFinally it is important to note that increasing the bandwidthefficiency is not desirable from an interference mitigationpoint of view Therefore from an aeronautical communica-tion system design point of view small (119864b1198730)
dBReqCoded is
desirable (which means going left in Figure 1) in order toincrease the LM as given in (3) On the other hand for agiven LM lower (119864b1198730)
dBReqCoded is desirable because it will
let the system achieve the same BER performance with lowertransmitting powers
3 TransmitReceive AntennaAngles and Beamforming
As discussed in the previous section parameters that affectthe AC system link budget can be summarized as followsoutput power of PA back-off value transmit and receiveantenna gains transmitterreceiver side losses rain lossesatmospheric losses statistical losses due to multipath polar-ization losses carrier frequencies communication distancesdata rates bandwidth and noise figure In order to providea careful and robust system design all the above param-eters as well as the relationship between them should bestudied in detail Even though most of these parametersare selecteddictated by the researcherssystem requirementsintegration relatedmultidisciplinary subjects can be analyzedseparately In this section we investigate the antenna gainsaccording to the kinematics of platforms In particular weprovide a mathematical tool for analyzing the transmitterand receiver antenna gains according to the positions of theplatforms Euler angles of the platforms (yaw pitch and roll)and antenna gain patterns
The antenna gain pattern has a critical importance insystem design In AC systems link margin can be increased(or the overall power consumption can be decreased) witha careful design of antenna pattern A directivity can beplaced by electronic beamforming andor mechanical beamsteering according to positions and Euler angles of theaeronautical platforms This directivity will provide a highertransmitter and receiver antenna gain between platformsline-of-sight (LOS) and therefore can provide a robust ACsystem link budget with additional link margins The rela-tionship between increasing the transmitter andor receiverantenna gain and link budget can be summarized as followsincreasing transmitter antenna gain (119866t) andor receiverantenna gain (119866r) increase the received power (119875r) in (1)therefore also increasing the received energy per symbol overpower spectral density of noise (119864s1198730)Rec in (2)Thatmeanscareful design of antenna pattern utilizing the positions andEuler angles of the platforms yield increased (119864s1198730)Recwhich increase the linkmargin (LMdB) according to (3)Thustracking the positions and Euler angles of the platforms canincrease the system performance from a link budget pointof view Moreover it can provide transmission security andadditional navigational reference to AC systems
4 International Journal of Aerospace Engineering
z‐axis
z‐axis
y‐axis
y‐axis
x‐axis
x‐axis
x‐axis
[0 180∘][0 359∘]
120601
(cut angle)
120579 isin120601 isin
120579
Figure 2 Antenna pattern angle definitions
Although it is very well understoodstudied in literaturein different domains a joint mathematical tool for bothantenna engineers and aeronautical engineers could providea complete understanding of system design Therefore it isimportant to provide a basis to the antenna pattern angledefinitions and aeronautical platform Euler angle definitionsas in Figures 2 and 3 respectively
Using the platformpositions in Figures 4 and 5 and Euler-angle definitions we study the LOS antenna angles for twoplatforms (The rest of the paper will provide a formulationfor two aeronautical platforms However the mathematicaltools provided in this paper can be used for an aeronautical-ground communication scenario st a fixed platform withfixed Euler angles can be used for any of the platforms)In this section we first present the antenna angles for twoplatforms only based on positions By using those results weadd the Euler angles to the formulations in order to providea complete solution
31 LOS Antenna Angles Based on Aeronautical PlatformPositions Let (119909
1 1199101 1199111) and (119909
2 1199102 1199112) denote the aeronau-
tical platform 1 (AP1) and AP2 positions respectively Alsoconsider that (pitch
1 roll1 yaw1) and (pitch
2 roll2 yaw2)
present the Euler angles for AP1 and AP2 The LOS antenna(120579119894000
119894 = 1 2) angles for AP1 and AP2 in the absence of
Euler angles (ie (pitch1 roll1 yaw1) = (0 0 0)) can be given
as
1205791000
=
tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 ge 0
120587 + tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 lt 0
1205792000
= 120587 minus 1205791000
(9)
where Δ119909 = 1199092minus 1199091 Δ119910 = 119910
2minus 1199101 and Δ119911 = 119911
2minus 1199111 On the
other hand the LOS antenna (120601119894000
119894 = 1 2) angles for AP1and AP2 values can be calculated as
1206011000
=
tanminus1 (Δ119910
Δ119909) if Δ119909 ge 0 Δ119910 ge 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 lt 0 Δ119910 gt 0
2120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 gt 0 Δ119910 lt 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 le 0 Δ119910 le 0
1206012000
=
1206011000
+ 120587 Δ119910 ge 0
1206011000
minus 120587 Δ119910 lt 0
(10)
International Journal of Aerospace Engineering 5
z‐axis y‐axis
x‐axis x‐axis
Pitch isin [+90∘ minus90∘] Roll isin [+180∘ minus180∘] Yaw isin [+180∘ minus180∘]
Pitch = +45∘
Pitch = 0∘
Pitch = minus45∘
Pitch = minus90∘
Pitch = +90∘
Roll = +135∘
Roll = +90∘
Roll = +45∘
Roll = 0∘
Roll = minus45∘
Roll = minus90∘
Roll = minus135∘
Roll = minus180∘
Roll = +180∘
Yaw = +180∘
Yaw = +135∘
Yaw = +90∘
Yaw = +45∘
Yaw = 0∘
Yaw = minus45∘
Yaw = minus90∘
Yaw = minus135∘
Yaw = minus180∘
Figure 3 Aeronautical platform Euler angle definitions
Note that (9)-(10) provide the AP1 and the AP2 LOSangles in the absence of pitch roll and yaw angles Howeverthey will be used as the initial values for the rest of thepaper
32 LOS Antenna Angles Based on Aeronautical PlatformPositions and Euler Angles In this section we first study theeffect of yaw
119894 119894 = 1 2 then pitch
119894 119894 = 1 2 and finally roll
119894
119894 = 1 2 on the antenna angles Firstly we investigate the effectof platform yaw movement on the antenna angles yaw
119894does
not have any effect on 120579119894000
that is 120579119894yaw11989400= 120579119894000
On theother hand the effect of yaw
119894on 120601119894000
can be given as
120601119894yaw11989400=
120572119894yaw11989400 if 0 le 120572
119894yaw11989400lt 2120587
120572119894yaw11989400minus 2120587 if 2120587 le 120572
119894yaw11989400
120572119894yaw11989400+ 2120587 if 120572
119894yaw11989400lt 0
(11)
where 120572119894yaw11989400= 120601119894000
+ yaw119894
After calculating 120579119894yaw11989400
and 120601119894yaw11989400
according to theyaw values of AP119894 119894 = 1 2 we may calculate 120579
119894yaw119894pitch1198940and
6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
z‐axis
z‐axis
y‐axis
y‐axis
x‐axis
x‐axis
x‐axis
[0 180∘][0 359∘]
120601
(cut angle)
120579 isin120601 isin
120579
Figure 2 Antenna pattern angle definitions
Although it is very well understoodstudied in literaturein different domains a joint mathematical tool for bothantenna engineers and aeronautical engineers could providea complete understanding of system design Therefore it isimportant to provide a basis to the antenna pattern angledefinitions and aeronautical platform Euler angle definitionsas in Figures 2 and 3 respectively
Using the platformpositions in Figures 4 and 5 and Euler-angle definitions we study the LOS antenna angles for twoplatforms (The rest of the paper will provide a formulationfor two aeronautical platforms However the mathematicaltools provided in this paper can be used for an aeronautical-ground communication scenario st a fixed platform withfixed Euler angles can be used for any of the platforms)In this section we first present the antenna angles for twoplatforms only based on positions By using those results weadd the Euler angles to the formulations in order to providea complete solution
31 LOS Antenna Angles Based on Aeronautical PlatformPositions Let (119909
1 1199101 1199111) and (119909
2 1199102 1199112) denote the aeronau-
tical platform 1 (AP1) and AP2 positions respectively Alsoconsider that (pitch
1 roll1 yaw1) and (pitch
2 roll2 yaw2)
present the Euler angles for AP1 and AP2 The LOS antenna(120579119894000
119894 = 1 2) angles for AP1 and AP2 in the absence of
Euler angles (ie (pitch1 roll1 yaw1) = (0 0 0)) can be given
as
1205791000
=
tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 ge 0
120587 + tanminus1(radicΔ1199092 + Δ1199102
Δ119911) if Δ119911 lt 0
1205792000
= 120587 minus 1205791000
(9)
where Δ119909 = 1199092minus 1199091 Δ119910 = 119910
2minus 1199101 and Δ119911 = 119911
2minus 1199111 On the
other hand the LOS antenna (120601119894000
119894 = 1 2) angles for AP1and AP2 values can be calculated as
1206011000
=
tanminus1 (Δ119910
Δ119909) if Δ119909 ge 0 Δ119910 ge 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 lt 0 Δ119910 gt 0
2120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 gt 0 Δ119910 lt 0
120587 + tanminus1 (Δ119910
Δ119909) if Δ119909 le 0 Δ119910 le 0
1206012000
=
1206011000
+ 120587 Δ119910 ge 0
1206011000
minus 120587 Δ119910 lt 0
(10)
International Journal of Aerospace Engineering 5
z‐axis y‐axis
x‐axis x‐axis
Pitch isin [+90∘ minus90∘] Roll isin [+180∘ minus180∘] Yaw isin [+180∘ minus180∘]
Pitch = +45∘
Pitch = 0∘
Pitch = minus45∘
Pitch = minus90∘
Pitch = +90∘
Roll = +135∘
Roll = +90∘
Roll = +45∘
Roll = 0∘
Roll = minus45∘
Roll = minus90∘
Roll = minus135∘
Roll = minus180∘
Roll = +180∘
Yaw = +180∘
Yaw = +135∘
Yaw = +90∘
Yaw = +45∘
Yaw = 0∘
Yaw = minus45∘
Yaw = minus90∘
Yaw = minus135∘
Yaw = minus180∘
Figure 3 Aeronautical platform Euler angle definitions
Note that (9)-(10) provide the AP1 and the AP2 LOSangles in the absence of pitch roll and yaw angles Howeverthey will be used as the initial values for the rest of thepaper
32 LOS Antenna Angles Based on Aeronautical PlatformPositions and Euler Angles In this section we first study theeffect of yaw
119894 119894 = 1 2 then pitch
119894 119894 = 1 2 and finally roll
119894
119894 = 1 2 on the antenna angles Firstly we investigate the effectof platform yaw movement on the antenna angles yaw
119894does
not have any effect on 120579119894000
that is 120579119894yaw11989400= 120579119894000
On theother hand the effect of yaw
119894on 120601119894000
can be given as
120601119894yaw11989400=
120572119894yaw11989400 if 0 le 120572
119894yaw11989400lt 2120587
120572119894yaw11989400minus 2120587 if 2120587 le 120572
119894yaw11989400
120572119894yaw11989400+ 2120587 if 120572
119894yaw11989400lt 0
(11)
where 120572119894yaw11989400= 120601119894000
+ yaw119894
After calculating 120579119894yaw11989400
and 120601119894yaw11989400
according to theyaw values of AP119894 119894 = 1 2 we may calculate 120579
119894yaw119894pitch1198940and
6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
z‐axis y‐axis
x‐axis x‐axis
Pitch isin [+90∘ minus90∘] Roll isin [+180∘ minus180∘] Yaw isin [+180∘ minus180∘]
Pitch = +45∘
Pitch = 0∘
Pitch = minus45∘
Pitch = minus90∘
Pitch = +90∘
Roll = +135∘
Roll = +90∘
Roll = +45∘
Roll = 0∘
Roll = minus45∘
Roll = minus90∘
Roll = minus135∘
Roll = minus180∘
Roll = +180∘
Yaw = +180∘
Yaw = +135∘
Yaw = +90∘
Yaw = +45∘
Yaw = 0∘
Yaw = minus45∘
Yaw = minus90∘
Yaw = minus135∘
Yaw = minus180∘
Figure 3 Aeronautical platform Euler angle definitions
Note that (9)-(10) provide the AP1 and the AP2 LOSangles in the absence of pitch roll and yaw angles Howeverthey will be used as the initial values for the rest of thepaper
32 LOS Antenna Angles Based on Aeronautical PlatformPositions and Euler Angles In this section we first study theeffect of yaw
119894 119894 = 1 2 then pitch
119894 119894 = 1 2 and finally roll
119894
119894 = 1 2 on the antenna angles Firstly we investigate the effectof platform yaw movement on the antenna angles yaw
119894does
not have any effect on 120579119894000
that is 120579119894yaw11989400= 120579119894000
On theother hand the effect of yaw
119894on 120601119894000
can be given as
120601119894yaw11989400=
120572119894yaw11989400 if 0 le 120572
119894yaw11989400lt 2120587
120572119894yaw11989400minus 2120587 if 2120587 le 120572
119894yaw11989400
120572119894yaw11989400+ 2120587 if 120572
119894yaw11989400lt 0
(11)
where 120572119894yaw11989400= 120601119894000
+ yaw119894
After calculating 120579119894yaw11989400
and 120601119894yaw11989400
according to theyaw values of AP119894 119894 = 1 2 we may calculate 120579
119894yaw119894pitch1198940and
6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
AP1
AP2
z‐axis
x‐axis
z2
z1
x2x1
1205792000
1205791000
Figure 4 LOS 1205791000
and 1205792000
angle definitions for AP1 and AP2
AP1
AP2
y‐axis
x‐axisx2x1
y2
y1
1206012000
1206011000
Figure 5 LOS 1206011000
and 1206012000
angle definitions for AP1 and AP2
120601119894yaw119894pitch1198940according to the pitch values of AP119894 119894 = 1 2
In order to present the effect of pitch on the angle observeFigure 6 Let 120579
119894yaw11989400
and 120601119894yaw11989400
119894 = 1 2 be the anglescalculated according to (11) which can be described with thepoint119860 in Figure 6Then the platformrsquos change of pitch angle
(isin minus1205872 1205872) will result in the shift of 120579119894yaw119894pitch1198940and
120601119894yaw119894pitch1198940on the circle which has the center of 1198741015840
Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579119894yaw11989400
|119861119874| =119877 sin 120579
119894yaw11989400
|1198611198741015840| = 119877 sin 120579119894yaw11989400
cos120601119894yaw11989400
|1198741015840119874| =119877 sin 120579
119894yaw11989400
sin120601119894yaw11989400
Let the radius of the circle cen-tered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 we can calculate120588 = 119877radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400
Let ang1198601198741015840119861 be definedas 120574119901119894 and then
120574119901119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw11989400
cos120601119894yaw11989400
)
(12)
Therefore rewriting the |119860119861| |119861119874| and|1198611198741015840| lengths interms of 120574
119901119894 we have
|119860119861| = 120588 sin 120574119901119894 = 119877 sin 120574119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816= 120588 cos 120574
119901119894= 119877 cos 120574
119901119894
sdot radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
10038161003816100381610038161003816119874101584011987410038161003816100381610038161003816
2
+10038161003816100381610038161003816119861119874101584010038161003816100381610038161003816
2
= |119861119874|2
|119861119874| = 119877 [cos2120574119901119894 minus cos2120574119901119894sin2120579119894yaw11989400
sin2120601119894yaw11989400
+ sin2120579119894yaw11989400
sin2120601119894yaw11989400]12
(13)
When we have a tilt along the length in the platform (iea change of pitch
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119901119894minus pitch
119894 Using this relationship and (13) we
may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as follows
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877 sin (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (14)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877 cos (120574
119901119894minus pitch
119894)radic1 minus sin2120579
119894yaw11989400
sin2120601119894yaw11989400 (15)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 [cos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400]12
(16)
120572119894yaw119894pitch
1198940
= tanminus1(radiccos2 (120574
119901119894minus pitch
119894) minus cos2 (120574
119901119894minus pitch
119894) sin2120579
119894yaw11989400
sin2120601119894yaw11989400+ sin2120579
119894yaw11989400
sin2120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
sin (120574119901119894minus pitch
119894)
) (17)
120573119894yaw119894pitch
1198940= tanminus1(
sin 120579119894yaw11989400
sin120601119894yaw11989400
radic1 minus sin2120579119894yaw11989400
sin2120601119894yaw11989400
cos (120574119901119894minus pitch
119894)) (18)
International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 7
Let 120572119894yaw119894pitch1198940= tanminus1(|1198611015840119874||11986010158401198611015840|) and 120573
119894yaw119894pitch1198940=
tanminus1(|1198741015840119874||11986110158401198741015840|) be the angles calculated as (17) and (18)respectivelyThen according to the pitch value (pitch
119894) of AP119894
119894 = 1 2 120579119894yaw119894pitch1198940and 120601
119894yaw119894pitch1198940can be calculated as
120579119894yaw119894pitch1198940=
120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 120574119901119894lt pitch
119894le120587
2
120587 minus 120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 minus
120587
2le pitch
119894le 120574119901119894
minus120572119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le3120587
2 120574119901119894lt pitch
119894le120587
2
120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 minus
120587
2le pitch
119894le 120574119901119894
120587 + 120572119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 120574
119901119894lt pitch
119894le120587
2
120601119894yaw119894pitch1198940=
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2 0 le 120579
119894yaw11989400le120587
2 120574119901119894+120587
2le pitch
119894le120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587 0 le 120579
119894yaw11989400le120587
2 120574119901119894minus120587
2le pitch
119894le120587
2
120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 0 le 120601
119894yaw11989400le120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
minus120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587
2lt 120601119894yaw11989400le 120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894minus120587
2
120587 minus 120573119894yaw119894pitch1198940 if 120587 lt 120601
119894yaw11989400le3120587
2120587
2lt 120579119894yaw11989400le 120587 120574
119901119894minus120587
2le pitch
119894le120587
2
2120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 minus
120587
2le pitch
119894lt 120574119901119894+120587
2
120587 + 120573119894yaw119894pitch1198940 if 3120587
2lt 120601119894yaw11989400lt 2120587
120587
2lt 120579119894yaw11989400le 120587 120574
119901119894+120587
2le pitch
119894le120587
2
(19)
Finally after calculating 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940
according to the pitch and yaw values of AP119894 119894 = 1 2 wemay calculate 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 according to
the roll values of AP119894 119894 = 1 2 in a similar mannerFigure 7 presents the effect of roll on the antenna angles
Let 120579119894yaw119894pitch1198940
and 120601119894yaw119894pitch1198940 119894 = 1 2 be the angles
calculated according to (19) which can be described with thepoint 119860 Then the platformrsquos change of roll angle (isin minus120587 120587)will result in the shift of 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 on
the circle which has the center of 1198741015840Let |119860119874| = 119877 then |119860119861| = 119877 cos 120579
119894yaw119894pitch1198940 |119861119874| =
119877 sin 120579119894yaw119894pitch1198940 |1198611198741015840| = 119877 sin 120579
119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Journal of Aerospace Engineering
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579iyawi 00
120601iyaw119894 00
Figure 6 Effect of platform pitch angle to the antenna angles
|1198741015840119874| = 119877 sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940 Let the radius of
the circle centered with 1198741015840 be 120588 Since 1205882 + |1198741015840119874|2 = 1198772 wecan calculate 120588 = 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940 Let
ang1198601198741015840119861 be (120574119903119894) and then
120574119903119894= tanminus1 ( |119860119861|1003816100381610038161003816119861119874
10158401003816100381610038161003816)
= tanminus1 ( 1
tan 120579119894yaw119894pitch1198940sin120601119894yaw119894pitch1198940
)
(20)
When we have tilt from side to side in the platform (iea change of roll
119894) we will have a new point on the circle
centered with 1198741015840 Let this point be 1198601015840 and the projection ofthis point on 119909-119910 plane be 1198611015840Then we can calculate the angleang119860101584011987410158401198611015840 = 120574
119903119894minus roll119894 Similar calculations as given for pitch
we may write |11986010158401198611015840| |1198611015840119874| and |11986110158401198741015840| as
100381610038161003816100381610038161198601015840119861101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot sin (120574
119903119894minus roll119894) (21)
100381610038161003816100381610038161198611015840119874101584010038161003816100381610038161003816= 119877radic1 minus sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sdot cos (120574
119903119894minus roll119894) (22)
10038161003816100381610038161003816119861101584011987410038161003816100381610038161003816= 119877 (cos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940)12
(23)
120572119894yaw119894pitch119894roll119894
= tanminus1(radiccos2 (120574
119903119894minus roll119894) minus cos2 (120574
119903119894minus roll119894) sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940+ sin2120579
119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940sin (120574119903119894minus roll119894)
) (24)
120573119894yaw119894pitch119894roll119894 = tanminus1(
radic1 minus sin2120579119894yaw119894pitch1198940cos2120601119894yaw119894pitch1198940cos (120574
119903119894minus roll119894)
sin 120579119894yaw119894pitch1198940cos120601119894yaw119894pitch1198940
) (25)
Let 120572119894yaw119894pitch119894roll119894 = tanminus1(|1198611015840119874||11986010158401198611015840|) and
120573119894yaw119894pitch119894roll119894 = tanminus1(|11986110158401198741015840||1198741015840119874|) be the angles calculated
as (24) and (25) respectivelyThen according to the roll value
(roll119894) of AP119894 119894 = 1 2 120579
119894yaw119894pitch119894roll119894 and 120601119894yaw119894 pitch119894 roll119894 can be
calculated as in
120579119894yaw119894pitch119894roll119894 =
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894le 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894le roll119894lt 120574119903119894+ 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587 0 le 120579
119894yaw119894pitch1198940le120587
2 120574119903119894+ 120587 le roll
119894le 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894
120587 + 120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894lt 120574119903119894+ 120587
120572119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le 120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894+ 120587 le roll
119894le 120587
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 minus 120587 le roll
119894lt 120574119903119894minus 120587
120587 minus 120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894minus 120587 le roll
119894lt 120574119903119894
minus120572119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940lt 2120587
120587
2lt 120579119894yaw119894pitch1198940le 120587 120574
119903119894le roll119894le 120587
International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 9
120601119894yaw119894pitch119894roll119894 =
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 minus 120587 le roll
119894lt 120574119903119894minus120587
2
120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
2120587 + 120573119894yaw119894pitch119894roll119894 if 0 le 120601
119894yaw119894pitch1198940le120587
2 120574119903119894+120587
2le roll119894le 120587
120587 + 120573119894yaw119894pitch119894roll119894 if
120587
2lt 120601119894yaw119894pitch1198940le 120587
120587 minus 120573119894yaw119894pitch119894roll119894 if 120587 lt 120601
119894yaw119894pitch1198940le3120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 minus 120587 le roll
119894lt 120574119903119894minus120587
2
2120587 minus 120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894minus120587
2le roll119894lt 120574119903119894+120587
2
minus120573119894yaw119894pitch119894roll119894 if 3120587
2lt 120601119894yaw119894pitch1198940lt 2120587 120574
119903119894+120587
2le roll119894le 120587
(26)
4 Numerical Analysis
In this section we present numerical analysis based on typ-ical AC scenarios that covers easy-to-understand positionsand Euler angles In particular we calculate 120579
119894yaw119894pitch119894roll119894
120601119894yaw119894pitch119894roll119894 using 120579119894000 120601119894000 120579119894yaw119894 00 120601119894yaw119894 00 and
120579119894yaw119894pitch1198940 120601119894yaw119894pitch1198940 Table 1 presents the results of
the numerical analysis (In this study we use practicalmeasurements and our tool had a chance to be used in areal-time practical scenario where the position and Eulerangles are collected by the telemetry of the aeronauticalstations The verification and validation activities are doneusing the practical scenarios however as the telemetry hasa limited continuous data (ie relative positions andor Eulerangles are slowly changing within boundaries due to physicallimitations of the ASs) the results do not provide enoughstatistics to verify all conditions Therefore we present a setof snapshot scenarios that cover many possible environmentsand without sake of brevity we continue our analyticalanalysis which leads to results that can be easily followedwith geometrical verification as provided in Table 1) Notethat 120579
119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894 values are calculated with
a precision of 2∘ that is according to the antenna gainvalue outputs of Computer Simulation Technology (CST)Microwave Studio Suite to decrease the processing powerDepending on the link budget analysis onemay allow havingantenna pointing error which can be covered by link marginto provide error tolerant signal processing algorithms for theantenna beamforming (It is important to note that one caneasily extend the study for real-time link budget calculationsand beamforming study utilizing positions and Euler anglesof platforms with a time index for a real scenario)
Note that this tool provides 120579119894yaw119894pitch119894roll119894 120601119894yaw119894 pitch119894 roll119894
values using the position and Euler angles of the plat-forms For AP1 platform to calculate its 120579
1yaw1pitch1roll1
1206011yaw
1pitch1roll1 the position and Euler angles of AP1 and
position of AP2 will be enough In most of the avionics usage
scenario this assumption is reasonable as the platforms knoweach otherrsquos initial positions via surveillance systems addi-tional avionic systems that provide position values with verylow data rate communication or RADAR however they donot know each otherrsquos Euler angles Using this mathematicaltool and mechanicalelectronical beam steering algorithmsthe positions of the aircraft can be followed while a robustcommunication can be ensured with increased link marginswith less power burden on the platform
5 Conclusion
In this paper we investigate the link budget of an AC systemand provide a tool for antenna beamforming In particularwe present the relationship between link budget analysis andantenna gains Then using the position information andEuler angles of the platforms we provide a tool that calculatesthe antenna angles This tool enables real-time link budgetanalysis of AC and Dopplerdelay spread mitigation tech-niques to performbetter as well as providing a complete set ofmathematical tool for a beam steering (electricalmechanical)algorithm
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors gratefully acknowledge the contributions of theircolleague Ali Ozgur Tasoglu for his work on the originalversion of this document M Cenk Erturk faculty advisorof Yasin Aksan also would like to thank his student onimplementations of the tool in this paper
10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 International Journal of Aerospace Engineering
Table1Num
ericalresults
11990911199101
1199111
1199011
1199031
ya1
1199092
1199102
1199112
1199012
1199032
ya2
119889120579111990111199031ya 1
120601111990111199031ya 1
120579211990121199032ya 2
120601211990121199032ya 2
55
530∘
30∘
30∘
1366
10
2232
45∘
45∘
45∘
20
72∘
46∘
92∘
226∘
55
5minus30∘
30∘
30∘
1366
10
2232
minus45∘
minus45∘
45∘
20
58∘
104∘
148∘
16∘
55
530∘
minus30∘
30∘
1366
10
2232
minus45∘
45∘
minus45∘
20
40∘
6∘
140∘
294∘
55
530∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
minus45∘
20
64∘
16∘
96∘
164∘
55
5minus30∘
minus30∘
30∘
1366
10
2232
45∘
45∘
minus45∘
20
14∘
196∘
106∘
186∘
55
5minus30∘
30∘
minus30∘
1366
10
2232
45∘
minus45∘
45∘
20
30∘
90∘
136∘
178∘
55
530∘
minus30∘
minus30∘
1366
10
2232
minus45∘
45∘
45∘
20
64∘
344∘
98∘
302∘
55
5minus30∘
minus30∘
minus30∘
1366
10
2232
minus45∘
minus45∘
minus45∘
20
30∘
270∘
126∘
70∘
55
530∘
30∘
30∘
minus366
10
2232
45∘
45∘
45∘
20
30∘
90∘
140∘
246∘
55
5minus30∘
30∘
30∘
minus366
10
2232
minus45∘
minus45∘
45∘
20
64∘
164∘
96∘
16∘
55
530∘
minus30∘
30∘
minus366
10
2232
minus45∘
45∘
minus45∘
20
30∘
270∘
92∘
314∘
55
530∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
minus45∘
20
58∘
76∘
148∘
164∘
55
5minus30∘
minus30∘
30∘
minus366
10
2232
45∘
45∘
minus45∘
20
64∘
196∘
98∘
238∘
55
5minus30∘
30∘
minus30∘
minus366
10
2232
45∘
minus45∘
45∘
20
72∘
134∘
126∘
110∘
55
530∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
45∘
45∘
20
14∘
344∘
106∘
354∘
55
5minus30∘
minus30∘
minus30∘
minus366
10
2232
minus45∘
minus45∘
minus45∘
20
40∘
174∘
136∘
2∘
55
530∘
30∘
30∘
1366
02232
45∘
45∘
45∘
20
64∘
16∘
96∘
196∘
55
5minus30∘
30∘
30∘
1366
02232
minus45∘
minus45∘
45∘
20
30∘
90∘
140∘
66∘
55
530∘
minus30∘
30∘
1366
02232
minus45∘
45∘
minus45∘
20
64∘
344∘
148∘
344∘
55
530∘
30∘
minus30∘
1366
02232
45∘
minus45∘
minus45∘
20
40∘
354∘
92∘
134∘
55
5minus30∘
minus30∘
30∘
1366
02232
45∘
45∘
minus45∘
20
30∘
270∘
136∘
182∘
55
5minus30∘
30∘
minus30∘
1366
02232
45∘
minus45∘
45∘
20
14∘
164∘
106∘
174∘
55
530∘
minus30∘
minus30∘
1366
02232
minus45∘
45∘
45∘
20
72∘
314∘
126∘
290∘
55
5minus30∘
minus30∘
minus30∘
1366
02232
minus45∘
minus45∘
minus45∘
20
58∘
256∘
98∘
58∘
55
530∘
30∘
30∘
1366
10
minus1232
45∘
45∘
45∘
20
166∘
196∘
32∘
16∘
55
5minus30∘
30∘
30∘
1366
10
minus1232
minus45∘
minus45∘
45∘
20
140∘
6∘
88∘
226∘
55
530∘
minus30∘
30∘
1366
10
minus1232
minus45∘
45∘
minus45∘
20
122∘
104∘
84∘
164∘
55
530∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
minus45∘
20
150∘
270∘
40∘
294∘
55
5minus30∘
minus30∘
30∘
1366
10
minus1232
45∘
45∘
minus45∘
20
108∘
46∘
54∘
70∘
55
5minus30∘
30∘
minus30∘
1366
10
minus1232
45∘
minus45∘
45∘
20
116∘
344∘
82∘
302∘
55
530∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
45∘
45∘
20
150∘
90∘
44∘
178∘
55
5minus30∘
minus30∘
minus30∘
1366
10
minus1232
minus45∘
minus45∘
minus45∘
20
116∘
16∘
74∘
186∘
International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 11
OA
B
z‐axis
y‐axis
x‐axis
O998400
120579i 119894 pitch119894 0
120601i
yawi
119894 pitch119894 0yawi
Figure 7 Effect of platform roll angle to the antenna angles
References
[1] M Schnell and S Scalise ldquoNEWSKYmdashconcept for NEtworkingthe SKY for civil aeronautical communicationsrdquo IEEEAerospaceand Electronic Systems Magazine vol 22 no 5 pp 25ndash29 2007
[2] NASA-ACAST ldquoFuture aeronautical communication infra-structure technology investigationrdquo 2008 httpacastgrcnasagovmainprojects
[3] R J Kerczewski ldquoAeronautical communications research anddevelopment needs for future air traffic management appli-cationsrdquo in Proceedings of the IEEE Aerospace Conference pp1169ndash1176 Big Sky MT USA March 2002
[4] E Sakhaee and A Jamalipour ldquoThe global in-flight internetrdquoIEEE Journal on Selected Areas in Communications vol 24 no9 pp 1748ndash1757 2006
[5] J Lai ldquoBroadbandwireless communication systems provided bycommercial airplanesrdquo US Patents 6 285 878 2001
[6] J M I Alonso andM S Perez ldquoPhased array for UAV commu-nications at 55 GHzrdquo IEEE Antennas and Wireless PropagationLetters vol 14 pp 771ndash774 2014
[7] J Chen and T G Pratt ldquoTransmit energy-efficiency forlong-range wireless communications from battery-poweredunmanned systemsrdquo IEEE Transactions on Aerospace and Elec-tronic Systems vol 51 no 4 pp 2944ndash2959 2015
[8] G M Djuknic J Freidenfelds and Y Okunev ldquoEstablishingwireless communications services via high-altitude aeronauti-cal platforms a concept whose time has comerdquo IEEE Commu-nications Magazine vol 35 no 9 pp 128ndash135 1997
[9] M C Erturk J Haque W A Moreno and H Arslan ldquoDopplermitigation in OFDM-based aeronautical communicationsrdquoIEEE Transactions on Aerospace and Electronic Systems vol 50no 1 pp 120ndash129 2014
[10] S L Heath G L McAninch C D Smith and D A ConnerldquoValidation of ray tracing code refraction effectrdquo in Proceedingsof the AIAACEASAeroacoustics Conference pp 1ndash11May 2002
[11] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[12] J Farrell and M Barth The Global Positioning System andInertial Navigation McGraw-Hill New York NY USA 1998
[13] C L Yu W D Burnside and M C Gilreath ldquoVolumetricpattern analysis of airborne antennasrdquo IEEE Transactions onAntennas and Propagation vol 26 no 5 pp 636ndash641 1978
[14] D Stacey Aeronautical Radio Communication Systems andNetworks John Wiley amp Sons England UK 2008
[15] International Civil Aviation Organization (ICAO) ldquoCompar-ison of typical airground aeronautical communication sys-tem propagation losses in the L band and the C bandrdquo inProceedings of the Regional Preparatory Group Meeting forWorld Radiocommunication Conference (WRC rsquo05) BangkokThailand February 2005
[16] J G ProakisDigital Communications McGraw-Hill NewYorkNY USA 1995
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of