Embed Size (px)
Citation preview
Hindawi Publishing CorporationJournal of OptimizationVolume 2013 Article ID 964262 8 pageshttpdxdoiorg1011552013964262
Research ArticleA Hybrid PSO-Fuzzy Model for Determining the Category of85th Speed
Abbas Mahmoudabadi1 and Ali Ghazizadeh2
1 Department of Industrial Engineering Payame Noor University (PNU) Shahnaz Alley Nourian Street North Dibagi AvenueTehran Iran
2 Technical and Engineering Department Payame Noor University (PNU) Firouzbakhsh Street Movahed Danesh AvenueAqdasieh Tehran Iran
Correspondence should be addressed to Abbas Mahmoudabadi mahmoudabadiphdpnuacir
Received 22 March 2013 Accepted 21 May 2013
Academic Editor Ling Wang
Copyright copy 2013 A Mahmoudabadi and A Ghazizadeh This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
The 85th speed of vehicles is one of the traffic engineering parameters used by road safety equipment designers It is usually usedfor maintenance activities and designing of warning signs and road equipments Highmeasuring costs of speed data collection leaddecision makers to define a methodology for determining the category of 85th speed using indirect parameters In this researchwork focusing on undivided intercity roads a hybrid particle-swarm-optimization- (PSO-) fuzzy model has been developed todetermine the category of 85th speed In this model geometric design parameters including roadsrsquo width and length characteristicsand roadside land use are considered as input variables whereas the category of the 85th speed is output variable A set ofexperimental data is used for evaluating the performance of the proposed model comparing to a well-knownmodel of exponentialregression It is shown that the developed PSO-fuzzy model is capable of determining the category of 85th speed with an accuracyof 96 while exponential regression can estimate that with up to 84 accuracy Variable effectiveness procedure shows that thelane width has more direct effect on 85th speed than shoulder width and the number of access points The percentage of forbiddenovertaking is also found to have indirect effect on 85th speed
1 Introduction
The 85th speed is one of the most important traffic engineer-ing parameters By definition the 85th speed is themaximumspeed that eighty-five percent (85) of drivers prefer to drivewith a speed less than that The importance of this param-eter is that the majority of drivers drive within their safeconsidered speed so the 85th speed is the maximum speedconsidered as safe speed bymost of drivers [1]The 85th speedis being used in some technical applications such as designingof road safety infrastructure planning road maintenanceprograms and setting warning signs while constructionworkers areworking on the road in order to provide the trafficwith safe passage Many parameters affect on 85th speedincluding authorized speed traffic volume land topographyand roadside land use condensations [1] Traditionally 85th
speed is calculated using vehiclersquos speed on a certain roadMany techniques have been utilized for estimating vehiclesrsquospeed mainly need for electronic devices and infrastructuresImage processing technique [2] combination of fuzzy logicand image processing [3] traffic counting and occupancydata [4] vehicle tracking [5] optical sensors [6] RF-basedvehicle detection [7] the field of mechanical engineering bykinematics relationship of measured signals [8] and trafficsurvey [1] are the well-known techniques on speed datacollection Expensive devices are needed for utilizing either ofthe previously mentioned techniques Therefore developinga low-cost procedure to estimate the category of 85th speed isquite interesting
Although 85th speed is a measurable parameter its exactquantity does not play significant role in real applicationsSo in the literature researchers utilized linguistic variables
2 Journal of Optimization
for this kind of parameters For example traffic volumeis measured precisely however it is usually expressed bylinguistic words such as heavy normal or low traffic [9 10]Therefore it is considerable to utilize fuzzy variables in orderto represent traffic parameters corresponding to the 85thspeed
Fuzzy approaches capture the senses of experts aboutinput parameters and convert them to fuzzy outputs usingspecified fuzzy relationships between input and output vari-ables The process of developing a fuzzy model has threestages The first is to define membership functions corre-sponding to input and output variables the second is to definerules and the third is to adjust input-output relationship [11]
For this advantage of fuzzy approaches they are utilizedin many fields of studies such as energy [12 13] road safetyevaluation programs [14] and road control system [15] In thefield of traffic and transportation engineering many researchworks have been found in the literature [16] For examplefuzzy approaches have been utilized for developing signaldetection theory in order to perceive workersrsquo hazards onsubway operations [17] developing fuzzy model to set trafficlight timing [18] proposing an expert fuzzy system to predictobject collision [19] and assessment of traffic parameters[20] Fuzzy approaches have also been used to estimate trafficparameters such as traffic jam [10] and passenger car unit [9]
The combinations of fuzzy and heuristic methods havealso been used for fuzzy clustering [21] forecasting [22]job scheduling [23] and time series planning [24] Anotherapplication is a combination of fuzzy logic and particle swarmoptimization to achieve the best performance of setting fuzzyparameters and improving definition of fuzzy logic relationsFor example a combination of PSO and GA is used inthe process of decision making [25] a balanced fuzzy PSOfor distinguishing differences between positive and negativeinformation of membership functions [26] an encodingfuzzymodel utilized to achieve the structures and parameters[27] An improved method of optimization using fuzzy logicto integrate the results of particle swarm optimization andgenetic algorithm for parameter tuning [28] is also found inthis area
In this research work a combination of particle swarmoptimization and fuzzy approach is used to develop a PSO-fuzzy model to determine the category of 85th speed inintercity roads The ability of fuzzy approach on defininglinguistic variables and PSO ability for parameter tuningare combined in the proposed model which is capable ofdetermining the category of the 85th speed by expertsrsquo pointsof view and low cost measures The main contribution inthis paper is developing a model to estimate the categoryof 85th speed of vehicles using a few measurable factorsThis concept can be applied in undivided roads in whichthere is no enough electronic devices or equipments to collectreliable data particularly corresponding to speed and trafficvolume After introduction Section 2 presents a very shortdescription on particle swarm optimization technique Inputand output variables corresponding to the model are definedin Section 3 followed by model development in Section 4Comparison of the results using the experimental data with awell-known exponential regression method of prediction as
well as summary and conclusion will be explained at the nexton Sections 5 and 6 respectively
2 Particle Swarm Optimization
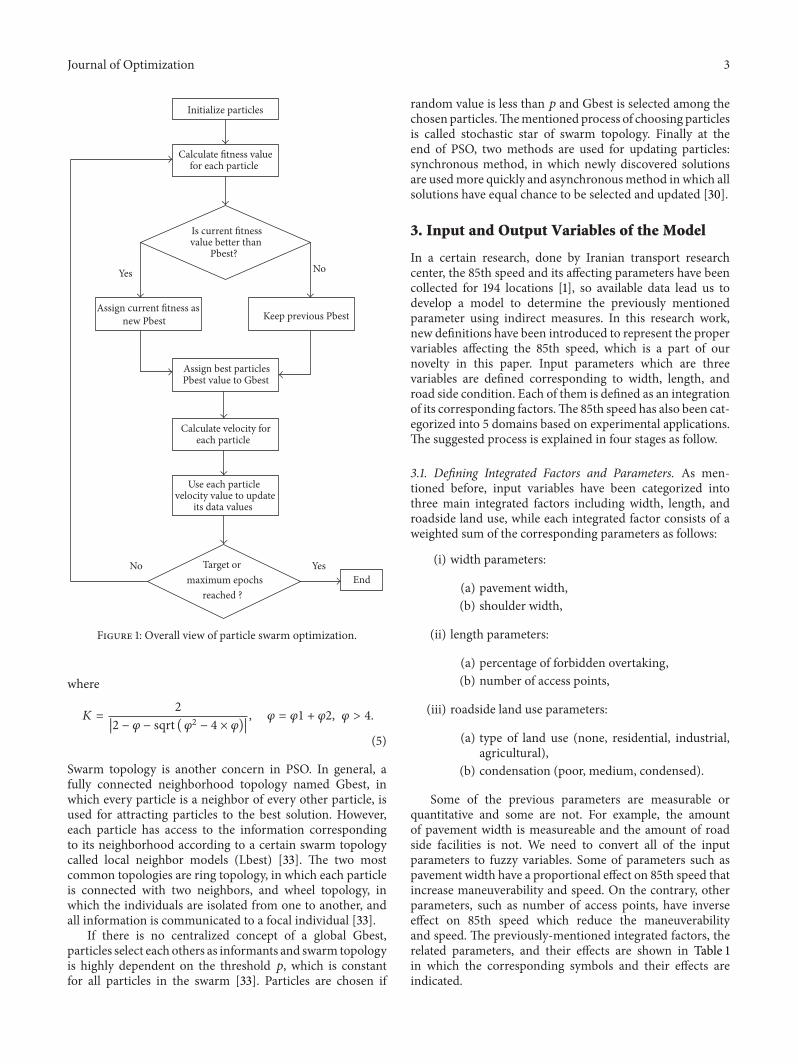
One of the well-known evolutionary algorithms used inoptimization problems is particle swarm optimization (PSO)Particle swarm optimization (PSO) is a heuristic techniquedeveloped based on bird flocking or fish schooling byKennedy and Eberhart in 1995 [29] It is a population-based technique the same as Genetic Algorithms (GA)Although PSOrsquos theoretical foundation is rather weak butits application has been proved to be effective [30] In PSOfeasible solutions called particles (individuals) are generatedby moving particles towards the current optimum particlesThe best solution in the current population is called Pbest andin the whole generation is called Gbest [29]Themain idea inthis process is to generate new populations by changing thevelocity of each particle towards its Pbest andGbest locationsRunning stages continue until stopping criteria are met Atfinal stage Gbest is considered as the best solution Figure 1illustrates the overall view of particle swarm optimization
In PSO a particle is composed of three vectors of 119883 119875and 119881 which represent the current location location of thebest solution and a gradient for moving particles respec-tively It also includes two fitness values 119883-Fitness recordsthe fitness of the 119883-vector and 119875-Fitness records the fitnessof 119875-vector Moving each particle is done by simply adding119881-vector to the 119883-vector while 119881-vector must have beenadjusted by random generated rates [31] In each iteration thepositions of particles are updated by using (1) while119881-vector(velocity) is adjusted by (2)
119883119894119889 = 119883119894119889 + 119881119894119889 (1)
119881119894119889 = 119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889) (2)
where 119883119894119889 is the position of particle 119889 is dimension 119881119894119889 ismoving rate 119875119894119889 is location of the best solution in iteration119894 and 119875119892119889 is the location of global best solution Differentamounts of 1205931 and 1205932 identify the types of PSO including fullmodel (1205931 1205932 gt 0) cognition only (1205931 gt 0 1205932 = 0) socialonly (1205931 = 0 1205932 gt 0) and selfless (1205931 = 0 1205932 gt 0 and 119892119894)[31]
There are two well-known techniques of controllingvelocities called inertia factor and constriction coefficientWhen inertia factor is used (2) is changed to (3) and whenconstriction coefficient is used (2) is changed to (4) [32]
119881119894119889 = 120596 times 119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889) (3)
119881119894119889 = 119870 times [119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)] (4)
Journal of Optimization 3
Initialize particles
Calculate fitness value for each particle
Is current fitness value better than
Pbest
Keep previous PbestAssign current fitness as
new Pbest
Assign best particles Pbest value to Gbest
Calculate velocity foreach particle
Use each particle velocity value to update
its data values
Target or maximum epochs
reached End
No Yes
NoYes
Figure 1 Overall view of particle swarm optimization
where
119870 =2
10038161003816100381610038162 minus 120593 minus sqrt ( 1205932 minus 4 times 120593)1003816100381610038161003816
120593 = 1205931 + 1205932 120593 gt 4
(5)
Swarm topology is another concern in PSO In general afully connected neighborhood topology named Gbest inwhich every particle is a neighbor of every other particle isused for attracting particles to the best solution Howevereach particle has access to the information correspondingto its neighborhood according to a certain swarm topologycalled local neighbor models (Lbest) [33] The two mostcommon topologies are ring topology in which each particleis connected with two neighbors and wheel topology inwhich the individuals are isolated from one to another andall information is communicated to a focal individual [33]
If there is no centralized concept of a global Gbestparticles select each others as informants and swarm topologyis highly dependent on the threshold 119901 which is constantfor all particles in the swarm [33] Particles are chosen if
random value is less than 119901 and Gbest is selected among thechosen particlesThementioned process of choosing particlesis called stochastic star of swarm topology Finally at theend of PSO two methods are used for updating particlessynchronous method in which newly discovered solutionsare usedmore quickly and asynchronousmethod in which allsolutions have equal chance to be selected and updated [30]
3 Input and Output Variables of the Model
In a certain research done by Iranian transport researchcenter the 85th speed and its affecting parameters have beencollected for 194 locations [1] so available data lead us todevelop a model to determine the previously mentionedparameter using indirect measures In this research worknew definitions have been introduced to represent the propervariables affecting the 85th speed which is a part of ournovelty in this paper Input parameters which are threevariables are defined corresponding to width length androad side condition Each of them is defined as an integrationof its corresponding factorsThe 85th speed has also been cat-egorized into 5 domains based on experimental applicationsThe suggested process is explained in four stages as follow
31 Defining Integrated Factors and Parameters As men-tioned before input variables have been categorized intothree main integrated factors including width length androadside land use while each integrated factor consists of aweighted sum of the corresponding parameters as follows
(i) width parameters
(a) pavement width(b) shoulder width
(ii) length parameters
(a) percentage of forbidden overtaking(b) number of access points
(iii) roadside land use parameters
(a) type of land use (none residential industrialagricultural)
(b) condensation (poor medium condensed)
Some of the previous parameters are measurable orquantitative and some are not For example the amountof pavement width is measureable and the amount of roadside facilities is not We need to convert all of the inputparameters to fuzzy variables Some of parameters such aspavement width have a proportional effect on 85th speed thatincrease maneuverability and speed On the contrary otherparameters such as number of access points have inverseeffect on 85th speed which reduce the maneuverabilityand speed The previously-mentioned integrated factors therelated parameters and their effects are shown in Table 1in which the corresponding symbols and their effects areindicated
4 Journal of Optimization
Table 1The integrated factors and corresponding parameters types(crisp or fuzzy) symbols and type of effect on the 85th speed value
Integrated factor Parameter CFlowast Symbol Effect
Width Pavement width C PW DirectShoulder width C SW Direct
Length Overtaking C OV IndirectAccess point C AP Indirect
Roadside Type F TF DirectLand use Condensation F CF DirectlowastC crisp F fuzzy
Table 2 Rules for defining the fuzzy variable of roadside facilities
Type Condensation LUWithout mdash 5Residential Poor 4Residential Medium 3Residential Condensed 2Industrial Poor 4Industrial Medium 3Industrial Condensed 2Agricultural Poor 5Agricultural Medium 4Agricultural Condensed 3
32 Defining Fuzzy Variables For different types and con-densations of roadside land use (LU) a number is associatedas shown in Table 2 Variable LU represents a combination ofboth type and condensation of land use in order to be used asinput variable The boundary of each combination has beenconsidered as variable in representation of the fuzzy variablein Table 2 so if a combination of more types of land use orcondensation needs to be considered a simple calculation isproposed to outline the final amount of variable For exampleif roadside land use consists of 20 percent industrial and80 percent agricultural and condensation is medium thusvariable is calculated by (02 times 3 + 08 times 4 = 38)
33 Converting Parameters to Fuzzy Input Variables Inte-grated variables which represent land use width and lengthincluding their parameters are defined according to (6) (7)and (8) respectively New variables of 1198811 1198812 and 1198813 withclosed interval of [0 1] are considered as inputs to the fuzzymodel
1198811 =1198821 times LU5
1198821 = [0 1] (6)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
711988221198823 = [0 1] (7)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2
11988241198825 = [0 1]
(8)
1198821 1198825 weighting factors are considered to be used bythe process of particle swarm optimization New variables
Table 3 Normalized variables of factors by fuzzy sets
State Bound Land use(V1)
Width(V2)
Length(V3)
0 0ndash025 Condensed Narrow Lowmaneuverable
05 025ndash075 Medium Medium Mediummaneuverable
1 075ndash1 Poor Vast Highmaneuverable
Table 4 Categories (Domains) of 85th speed
State Fuzzy definition Lower bound(Kmh)
Upper bound(Kmh)
1 Very low 51 602 Low 61 753 Medium 76 904 High 91 1005 Very high 101 110
11988111198812 and 1198813 shown in Table 3 are defined as uniformedfuzzy variables when they have been converted to the fuzzynorms The formulation of PSO provides an ability to meetthe previous constraints while the feasible solutions are keptwhile parameters are restricted to closed interval [0 1]
34 Setting Output Variable The 85th speed is categorizedaccording to instruction manuals which are being used forroad maintenance and road construction building [34] Inthismanual 85th speed is defined in six domains started from0 ended to 110 kmh however in this research work the rangeof speed was considered from 50 to 110 kmh and the scopeof 85th speed is limited to five classes as shown in Table 4
4 Developing PSO-Fuzzy Model
41Main Structure Theproposed PSO-fuzzymodel includestwomain parts that are PSO and fuzzy partsThe fuzzymodelestimates 85th speed based on input variables 1198811 1198812 and1198813 while PSO generates input variables based on weightingfactors and compares estimated results with correspondingexperimental data The process is an iteration-based oneIt means that parameters are updated in each sequenceof running the model by checking stopping criteria Thestopping criterion is a constant number of iterations
A PSO-fuzzy model is required to go through the follow-ing steps
(1) initialization of weighting parameters (1198821 1198825)
(2) converting crisp variables to fuzzy ones using (6) (7)and (8)
(3) running the fuzzy part of the model
(4) checking stopping criteria
Journal of Optimization 5
01
03
05
07
09
11
0 02 04 06 08 1Domain of input variables
Membership function of inputs
State 0State 05State 1
minus01
Figure 2 Membership functions corresponding to input variables
(5) if stopping criteria are met go to step (7) and showresults
(6) update weighting parameters according to PSO veloc-ity and movement and then go to step (2)
(7) check and compare results with another method
42 Defining Membership Functions and Fuzzy Model Thefirst step of developing the fuzzy model is to define member-ship functions corresponding to input and output variablesInput variables are defined by one-interval domain so atriangular membership function is appropriate to defineinput variables Output variable is defined into five categoriesso a trapezoidal membership function is used to defineoutput variable For each of the three input variables atriangular membership functions is defined [11] Figure 2shows a sample of membership function utilized for inputvariables A trapezoidal membership function is used foroutput variable as shown in Figure 3Theoverall view of fuzzymodel is also shown in Figure 4
43 Rule Definition For this fuzzy model the correspondingrules are defined according to the traffic expertsrsquo pointsof view which explain the relationships between input andoutput variables [11] Since the road width road length andland use have three different states a maximum number of3 times 3 times 3 = 27 rules can be used to define the relationshipbetween input and output variablesThe corresponding statesof the rules are shown in Table 5
44Model Presentation Minimizing the number of incorrectassignment for defined categories of 85th speed is the mainobjective function in the proposedPSO-fuzzymodel Assumethat119873
119898119894is the number of samples assigned to the 119894th category
01
03
05
07
09
11
50 60 70 80 90 100 110Speed domain
Membership function for output
Very lowLowMedium
HighVery high
minus01
Figure 3 Membership function corresponding to 85th speed
Land use
Width
Length
PSO-fuzzy model
85th speed
Inputs Model Output
Figure 4 Overall view of fuzzy model
bymodel and119873119900119894is the observed one then objective function
would be defined according to the following equation
Min 119885 =
5
sum
119894=1
1003816100381610038161003816119873119898119894 minus 1198731199001198941003816100381610038161003816
for 119894 = 1 5 (all speed categories)
Subject to model constraints
(9)
where new variables defined by (6) to (8) will calculate thenormalized variables which are assigned to the 85th speedcategories
119873119898119894 = Sum (Rule (1198811 1198812 1198813) 119894) for 119894 = 1 5 (10)
1198811 =1198821 times LU5 (11)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
7 (12)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2 (13)
And model constraints are as follows0 le 1198811 1198812 1198813 le 1
0 le 11988211198822119882311988241198825 le 1
(14)
6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Journal of Optimization
for this kind of parameters For example traffic volumeis measured precisely however it is usually expressed bylinguistic words such as heavy normal or low traffic [9 10]Therefore it is considerable to utilize fuzzy variables in orderto represent traffic parameters corresponding to the 85thspeed
Fuzzy approaches capture the senses of experts aboutinput parameters and convert them to fuzzy outputs usingspecified fuzzy relationships between input and output vari-ables The process of developing a fuzzy model has threestages The first is to define membership functions corre-sponding to input and output variables the second is to definerules and the third is to adjust input-output relationship [11]
For this advantage of fuzzy approaches they are utilizedin many fields of studies such as energy [12 13] road safetyevaluation programs [14] and road control system [15] In thefield of traffic and transportation engineering many researchworks have been found in the literature [16] For examplefuzzy approaches have been utilized for developing signaldetection theory in order to perceive workersrsquo hazards onsubway operations [17] developing fuzzy model to set trafficlight timing [18] proposing an expert fuzzy system to predictobject collision [19] and assessment of traffic parameters[20] Fuzzy approaches have also been used to estimate trafficparameters such as traffic jam [10] and passenger car unit [9]
The combinations of fuzzy and heuristic methods havealso been used for fuzzy clustering [21] forecasting [22]job scheduling [23] and time series planning [24] Anotherapplication is a combination of fuzzy logic and particle swarmoptimization to achieve the best performance of setting fuzzyparameters and improving definition of fuzzy logic relationsFor example a combination of PSO and GA is used inthe process of decision making [25] a balanced fuzzy PSOfor distinguishing differences between positive and negativeinformation of membership functions [26] an encodingfuzzymodel utilized to achieve the structures and parameters[27] An improved method of optimization using fuzzy logicto integrate the results of particle swarm optimization andgenetic algorithm for parameter tuning [28] is also found inthis area
In this research work a combination of particle swarmoptimization and fuzzy approach is used to develop a PSO-fuzzy model to determine the category of 85th speed inintercity roads The ability of fuzzy approach on defininglinguistic variables and PSO ability for parameter tuningare combined in the proposed model which is capable ofdetermining the category of the 85th speed by expertsrsquo pointsof view and low cost measures The main contribution inthis paper is developing a model to estimate the categoryof 85th speed of vehicles using a few measurable factorsThis concept can be applied in undivided roads in whichthere is no enough electronic devices or equipments to collectreliable data particularly corresponding to speed and trafficvolume After introduction Section 2 presents a very shortdescription on particle swarm optimization technique Inputand output variables corresponding to the model are definedin Section 3 followed by model development in Section 4Comparison of the results using the experimental data with awell-known exponential regression method of prediction as
well as summary and conclusion will be explained at the nexton Sections 5 and 6 respectively
2 Particle Swarm Optimization
One of the well-known evolutionary algorithms used inoptimization problems is particle swarm optimization (PSO)Particle swarm optimization (PSO) is a heuristic techniquedeveloped based on bird flocking or fish schooling byKennedy and Eberhart in 1995 [29] It is a population-based technique the same as Genetic Algorithms (GA)Although PSOrsquos theoretical foundation is rather weak butits application has been proved to be effective [30] In PSOfeasible solutions called particles (individuals) are generatedby moving particles towards the current optimum particlesThe best solution in the current population is called Pbest andin the whole generation is called Gbest [29]Themain idea inthis process is to generate new populations by changing thevelocity of each particle towards its Pbest andGbest locationsRunning stages continue until stopping criteria are met Atfinal stage Gbest is considered as the best solution Figure 1illustrates the overall view of particle swarm optimization
In PSO a particle is composed of three vectors of 119883 119875and 119881 which represent the current location location of thebest solution and a gradient for moving particles respec-tively It also includes two fitness values 119883-Fitness recordsthe fitness of the 119883-vector and 119875-Fitness records the fitnessof 119875-vector Moving each particle is done by simply adding119881-vector to the 119883-vector while 119881-vector must have beenadjusted by random generated rates [31] In each iteration thepositions of particles are updated by using (1) while119881-vector(velocity) is adjusted by (2)
119883119894119889 = 119883119894119889 + 119881119894119889 (1)
119881119894119889 = 119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889) (2)
where 119883119894119889 is the position of particle 119889 is dimension 119881119894119889 ismoving rate 119875119894119889 is location of the best solution in iteration119894 and 119875119892119889 is the location of global best solution Differentamounts of 1205931 and 1205932 identify the types of PSO including fullmodel (1205931 1205932 gt 0) cognition only (1205931 gt 0 1205932 = 0) socialonly (1205931 = 0 1205932 gt 0) and selfless (1205931 = 0 1205932 gt 0 and 119892119894)[31]
There are two well-known techniques of controllingvelocities called inertia factor and constriction coefficientWhen inertia factor is used (2) is changed to (3) and whenconstriction coefficient is used (2) is changed to (4) [32]
119881119894119889 = 120596 times 119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889) (3)
119881119894119889 = 119870 times [119881119894119889 + 1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)] (4)
Journal of Optimization 3
Initialize particles
Calculate fitness value for each particle
Is current fitness value better than
Pbest
Keep previous PbestAssign current fitness as
new Pbest
Assign best particles Pbest value to Gbest
Calculate velocity foreach particle
Use each particle velocity value to update
its data values
Target or maximum epochs
reached End
No Yes
NoYes
Figure 1 Overall view of particle swarm optimization
where
119870 =2
10038161003816100381610038162 minus 120593 minus sqrt ( 1205932 minus 4 times 120593)1003816100381610038161003816
120593 = 1205931 + 1205932 120593 gt 4
(5)
Swarm topology is another concern in PSO In general afully connected neighborhood topology named Gbest inwhich every particle is a neighbor of every other particle isused for attracting particles to the best solution Howevereach particle has access to the information correspondingto its neighborhood according to a certain swarm topologycalled local neighbor models (Lbest) [33] The two mostcommon topologies are ring topology in which each particleis connected with two neighbors and wheel topology inwhich the individuals are isolated from one to another andall information is communicated to a focal individual [33]
If there is no centralized concept of a global Gbestparticles select each others as informants and swarm topologyis highly dependent on the threshold 119901 which is constantfor all particles in the swarm [33] Particles are chosen if
random value is less than 119901 and Gbest is selected among thechosen particlesThementioned process of choosing particlesis called stochastic star of swarm topology Finally at theend of PSO two methods are used for updating particlessynchronous method in which newly discovered solutionsare usedmore quickly and asynchronousmethod in which allsolutions have equal chance to be selected and updated [30]
3 Input and Output Variables of the Model
In a certain research done by Iranian transport researchcenter the 85th speed and its affecting parameters have beencollected for 194 locations [1] so available data lead us todevelop a model to determine the previously mentionedparameter using indirect measures In this research worknew definitions have been introduced to represent the propervariables affecting the 85th speed which is a part of ournovelty in this paper Input parameters which are threevariables are defined corresponding to width length androad side condition Each of them is defined as an integrationof its corresponding factorsThe 85th speed has also been cat-egorized into 5 domains based on experimental applicationsThe suggested process is explained in four stages as follow
31 Defining Integrated Factors and Parameters As men-tioned before input variables have been categorized intothree main integrated factors including width length androadside land use while each integrated factor consists of aweighted sum of the corresponding parameters as follows
(i) width parameters
(a) pavement width(b) shoulder width
(ii) length parameters
(a) percentage of forbidden overtaking(b) number of access points
(iii) roadside land use parameters
(a) type of land use (none residential industrialagricultural)
(b) condensation (poor medium condensed)
Some of the previous parameters are measurable orquantitative and some are not For example the amountof pavement width is measureable and the amount of roadside facilities is not We need to convert all of the inputparameters to fuzzy variables Some of parameters such aspavement width have a proportional effect on 85th speed thatincrease maneuverability and speed On the contrary otherparameters such as number of access points have inverseeffect on 85th speed which reduce the maneuverabilityand speed The previously-mentioned integrated factors therelated parameters and their effects are shown in Table 1in which the corresponding symbols and their effects areindicated
4 Journal of Optimization
Table 1The integrated factors and corresponding parameters types(crisp or fuzzy) symbols and type of effect on the 85th speed value
Integrated factor Parameter CFlowast Symbol Effect
Width Pavement width C PW DirectShoulder width C SW Direct
Length Overtaking C OV IndirectAccess point C AP Indirect
Roadside Type F TF DirectLand use Condensation F CF DirectlowastC crisp F fuzzy
Table 2 Rules for defining the fuzzy variable of roadside facilities
Type Condensation LUWithout mdash 5Residential Poor 4Residential Medium 3Residential Condensed 2Industrial Poor 4Industrial Medium 3Industrial Condensed 2Agricultural Poor 5Agricultural Medium 4Agricultural Condensed 3
32 Defining Fuzzy Variables For different types and con-densations of roadside land use (LU) a number is associatedas shown in Table 2 Variable LU represents a combination ofboth type and condensation of land use in order to be used asinput variable The boundary of each combination has beenconsidered as variable in representation of the fuzzy variablein Table 2 so if a combination of more types of land use orcondensation needs to be considered a simple calculation isproposed to outline the final amount of variable For exampleif roadside land use consists of 20 percent industrial and80 percent agricultural and condensation is medium thusvariable is calculated by (02 times 3 + 08 times 4 = 38)
33 Converting Parameters to Fuzzy Input Variables Inte-grated variables which represent land use width and lengthincluding their parameters are defined according to (6) (7)and (8) respectively New variables of 1198811 1198812 and 1198813 withclosed interval of [0 1] are considered as inputs to the fuzzymodel
1198811 =1198821 times LU5
1198821 = [0 1] (6)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
711988221198823 = [0 1] (7)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2
11988241198825 = [0 1]
(8)
1198821 1198825 weighting factors are considered to be used bythe process of particle swarm optimization New variables
Table 3 Normalized variables of factors by fuzzy sets
State Bound Land use(V1)
Width(V2)
Length(V3)
0 0ndash025 Condensed Narrow Lowmaneuverable
05 025ndash075 Medium Medium Mediummaneuverable
1 075ndash1 Poor Vast Highmaneuverable
Table 4 Categories (Domains) of 85th speed
State Fuzzy definition Lower bound(Kmh)
Upper bound(Kmh)
1 Very low 51 602 Low 61 753 Medium 76 904 High 91 1005 Very high 101 110
11988111198812 and 1198813 shown in Table 3 are defined as uniformedfuzzy variables when they have been converted to the fuzzynorms The formulation of PSO provides an ability to meetthe previous constraints while the feasible solutions are keptwhile parameters are restricted to closed interval [0 1]
34 Setting Output Variable The 85th speed is categorizedaccording to instruction manuals which are being used forroad maintenance and road construction building [34] Inthismanual 85th speed is defined in six domains started from0 ended to 110 kmh however in this research work the rangeof speed was considered from 50 to 110 kmh and the scopeof 85th speed is limited to five classes as shown in Table 4
4 Developing PSO-Fuzzy Model
41Main Structure Theproposed PSO-fuzzymodel includestwomain parts that are PSO and fuzzy partsThe fuzzymodelestimates 85th speed based on input variables 1198811 1198812 and1198813 while PSO generates input variables based on weightingfactors and compares estimated results with correspondingexperimental data The process is an iteration-based oneIt means that parameters are updated in each sequenceof running the model by checking stopping criteria Thestopping criterion is a constant number of iterations
A PSO-fuzzy model is required to go through the follow-ing steps
(1) initialization of weighting parameters (1198821 1198825)
(2) converting crisp variables to fuzzy ones using (6) (7)and (8)
(3) running the fuzzy part of the model
(4) checking stopping criteria
Journal of Optimization 5
01
03
05
07
09
11
0 02 04 06 08 1Domain of input variables
Membership function of inputs
State 0State 05State 1
minus01
Figure 2 Membership functions corresponding to input variables
(5) if stopping criteria are met go to step (7) and showresults
(6) update weighting parameters according to PSO veloc-ity and movement and then go to step (2)
(7) check and compare results with another method
42 Defining Membership Functions and Fuzzy Model Thefirst step of developing the fuzzy model is to define member-ship functions corresponding to input and output variablesInput variables are defined by one-interval domain so atriangular membership function is appropriate to defineinput variables Output variable is defined into five categoriesso a trapezoidal membership function is used to defineoutput variable For each of the three input variables atriangular membership functions is defined [11] Figure 2shows a sample of membership function utilized for inputvariables A trapezoidal membership function is used foroutput variable as shown in Figure 3Theoverall view of fuzzymodel is also shown in Figure 4
43 Rule Definition For this fuzzy model the correspondingrules are defined according to the traffic expertsrsquo pointsof view which explain the relationships between input andoutput variables [11] Since the road width road length andland use have three different states a maximum number of3 times 3 times 3 = 27 rules can be used to define the relationshipbetween input and output variablesThe corresponding statesof the rules are shown in Table 5
44Model Presentation Minimizing the number of incorrectassignment for defined categories of 85th speed is the mainobjective function in the proposedPSO-fuzzymodel Assumethat119873
119898119894is the number of samples assigned to the 119894th category
01
03
05
07
09
11
50 60 70 80 90 100 110Speed domain
Membership function for output
Very lowLowMedium
HighVery high
minus01
Figure 3 Membership function corresponding to 85th speed
Land use
Width
Length
PSO-fuzzy model
85th speed
Inputs Model Output
Figure 4 Overall view of fuzzy model
bymodel and119873119900119894is the observed one then objective function
would be defined according to the following equation
Min 119885 =
5
sum
119894=1
1003816100381610038161003816119873119898119894 minus 1198731199001198941003816100381610038161003816
for 119894 = 1 5 (all speed categories)
Subject to model constraints
(9)
where new variables defined by (6) to (8) will calculate thenormalized variables which are assigned to the 85th speedcategories
119873119898119894 = Sum (Rule (1198811 1198812 1198813) 119894) for 119894 = 1 5 (10)
1198811 =1198821 times LU5 (11)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
7 (12)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2 (13)
And model constraints are as follows0 le 1198811 1198812 1198813 le 1
0 le 11988211198822119882311988241198825 le 1
(14)
6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Journal of Optimization 3
Initialize particles
Calculate fitness value for each particle
Is current fitness value better than
Pbest
Keep previous PbestAssign current fitness as
new Pbest
Assign best particles Pbest value to Gbest
Calculate velocity foreach particle
Use each particle velocity value to update
its data values
Target or maximum epochs
reached End
No Yes
NoYes
Figure 1 Overall view of particle swarm optimization
where
119870 =2
10038161003816100381610038162 minus 120593 minus sqrt ( 1205932 minus 4 times 120593)1003816100381610038161003816
120593 = 1205931 + 1205932 120593 gt 4
(5)
Swarm topology is another concern in PSO In general afully connected neighborhood topology named Gbest inwhich every particle is a neighbor of every other particle isused for attracting particles to the best solution Howevereach particle has access to the information correspondingto its neighborhood according to a certain swarm topologycalled local neighbor models (Lbest) [33] The two mostcommon topologies are ring topology in which each particleis connected with two neighbors and wheel topology inwhich the individuals are isolated from one to another andall information is communicated to a focal individual [33]
If there is no centralized concept of a global Gbestparticles select each others as informants and swarm topologyis highly dependent on the threshold 119901 which is constantfor all particles in the swarm [33] Particles are chosen if
random value is less than 119901 and Gbest is selected among thechosen particlesThementioned process of choosing particlesis called stochastic star of swarm topology Finally at theend of PSO two methods are used for updating particlessynchronous method in which newly discovered solutionsare usedmore quickly and asynchronousmethod in which allsolutions have equal chance to be selected and updated [30]
3 Input and Output Variables of the Model
In a certain research done by Iranian transport researchcenter the 85th speed and its affecting parameters have beencollected for 194 locations [1] so available data lead us todevelop a model to determine the previously mentionedparameter using indirect measures In this research worknew definitions have been introduced to represent the propervariables affecting the 85th speed which is a part of ournovelty in this paper Input parameters which are threevariables are defined corresponding to width length androad side condition Each of them is defined as an integrationof its corresponding factorsThe 85th speed has also been cat-egorized into 5 domains based on experimental applicationsThe suggested process is explained in four stages as follow
31 Defining Integrated Factors and Parameters As men-tioned before input variables have been categorized intothree main integrated factors including width length androadside land use while each integrated factor consists of aweighted sum of the corresponding parameters as follows
(i) width parameters
(a) pavement width(b) shoulder width
(ii) length parameters
(a) percentage of forbidden overtaking(b) number of access points
(iii) roadside land use parameters
(a) type of land use (none residential industrialagricultural)
(b) condensation (poor medium condensed)
Some of the previous parameters are measurable orquantitative and some are not For example the amountof pavement width is measureable and the amount of roadside facilities is not We need to convert all of the inputparameters to fuzzy variables Some of parameters such aspavement width have a proportional effect on 85th speed thatincrease maneuverability and speed On the contrary otherparameters such as number of access points have inverseeffect on 85th speed which reduce the maneuverabilityand speed The previously-mentioned integrated factors therelated parameters and their effects are shown in Table 1in which the corresponding symbols and their effects areindicated
4 Journal of Optimization
Table 1The integrated factors and corresponding parameters types(crisp or fuzzy) symbols and type of effect on the 85th speed value
Integrated factor Parameter CFlowast Symbol Effect
Width Pavement width C PW DirectShoulder width C SW Direct
Length Overtaking C OV IndirectAccess point C AP Indirect
Roadside Type F TF DirectLand use Condensation F CF DirectlowastC crisp F fuzzy
Table 2 Rules for defining the fuzzy variable of roadside facilities
Type Condensation LUWithout mdash 5Residential Poor 4Residential Medium 3Residential Condensed 2Industrial Poor 4Industrial Medium 3Industrial Condensed 2Agricultural Poor 5Agricultural Medium 4Agricultural Condensed 3
32 Defining Fuzzy Variables For different types and con-densations of roadside land use (LU) a number is associatedas shown in Table 2 Variable LU represents a combination ofboth type and condensation of land use in order to be used asinput variable The boundary of each combination has beenconsidered as variable in representation of the fuzzy variablein Table 2 so if a combination of more types of land use orcondensation needs to be considered a simple calculation isproposed to outline the final amount of variable For exampleif roadside land use consists of 20 percent industrial and80 percent agricultural and condensation is medium thusvariable is calculated by (02 times 3 + 08 times 4 = 38)
33 Converting Parameters to Fuzzy Input Variables Inte-grated variables which represent land use width and lengthincluding their parameters are defined according to (6) (7)and (8) respectively New variables of 1198811 1198812 and 1198813 withclosed interval of [0 1] are considered as inputs to the fuzzymodel
1198811 =1198821 times LU5
1198821 = [0 1] (6)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
711988221198823 = [0 1] (7)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2
11988241198825 = [0 1]
(8)
1198821 1198825 weighting factors are considered to be used bythe process of particle swarm optimization New variables
Table 3 Normalized variables of factors by fuzzy sets
State Bound Land use(V1)
Width(V2)
Length(V3)
0 0ndash025 Condensed Narrow Lowmaneuverable
05 025ndash075 Medium Medium Mediummaneuverable
1 075ndash1 Poor Vast Highmaneuverable
Table 4 Categories (Domains) of 85th speed
State Fuzzy definition Lower bound(Kmh)
Upper bound(Kmh)
1 Very low 51 602 Low 61 753 Medium 76 904 High 91 1005 Very high 101 110
11988111198812 and 1198813 shown in Table 3 are defined as uniformedfuzzy variables when they have been converted to the fuzzynorms The formulation of PSO provides an ability to meetthe previous constraints while the feasible solutions are keptwhile parameters are restricted to closed interval [0 1]
34 Setting Output Variable The 85th speed is categorizedaccording to instruction manuals which are being used forroad maintenance and road construction building [34] Inthismanual 85th speed is defined in six domains started from0 ended to 110 kmh however in this research work the rangeof speed was considered from 50 to 110 kmh and the scopeof 85th speed is limited to five classes as shown in Table 4
4 Developing PSO-Fuzzy Model
41Main Structure Theproposed PSO-fuzzymodel includestwomain parts that are PSO and fuzzy partsThe fuzzymodelestimates 85th speed based on input variables 1198811 1198812 and1198813 while PSO generates input variables based on weightingfactors and compares estimated results with correspondingexperimental data The process is an iteration-based oneIt means that parameters are updated in each sequenceof running the model by checking stopping criteria Thestopping criterion is a constant number of iterations
A PSO-fuzzy model is required to go through the follow-ing steps
(1) initialization of weighting parameters (1198821 1198825)
(2) converting crisp variables to fuzzy ones using (6) (7)and (8)
(3) running the fuzzy part of the model
(4) checking stopping criteria
Journal of Optimization 5
01
03
05
07
09
11
0 02 04 06 08 1Domain of input variables
Membership function of inputs
State 0State 05State 1
minus01
Figure 2 Membership functions corresponding to input variables
(5) if stopping criteria are met go to step (7) and showresults
(6) update weighting parameters according to PSO veloc-ity and movement and then go to step (2)
(7) check and compare results with another method
42 Defining Membership Functions and Fuzzy Model Thefirst step of developing the fuzzy model is to define member-ship functions corresponding to input and output variablesInput variables are defined by one-interval domain so atriangular membership function is appropriate to defineinput variables Output variable is defined into five categoriesso a trapezoidal membership function is used to defineoutput variable For each of the three input variables atriangular membership functions is defined [11] Figure 2shows a sample of membership function utilized for inputvariables A trapezoidal membership function is used foroutput variable as shown in Figure 3Theoverall view of fuzzymodel is also shown in Figure 4
43 Rule Definition For this fuzzy model the correspondingrules are defined according to the traffic expertsrsquo pointsof view which explain the relationships between input andoutput variables [11] Since the road width road length andland use have three different states a maximum number of3 times 3 times 3 = 27 rules can be used to define the relationshipbetween input and output variablesThe corresponding statesof the rules are shown in Table 5
44Model Presentation Minimizing the number of incorrectassignment for defined categories of 85th speed is the mainobjective function in the proposedPSO-fuzzymodel Assumethat119873
119898119894is the number of samples assigned to the 119894th category
01
03
05
07
09
11
50 60 70 80 90 100 110Speed domain
Membership function for output
Very lowLowMedium
HighVery high
minus01
Figure 3 Membership function corresponding to 85th speed
Land use
Width
Length
PSO-fuzzy model
85th speed
Inputs Model Output
Figure 4 Overall view of fuzzy model
bymodel and119873119900119894is the observed one then objective function
would be defined according to the following equation
Min 119885 =
5
sum
119894=1
1003816100381610038161003816119873119898119894 minus 1198731199001198941003816100381610038161003816
for 119894 = 1 5 (all speed categories)
Subject to model constraints
(9)
where new variables defined by (6) to (8) will calculate thenormalized variables which are assigned to the 85th speedcategories
119873119898119894 = Sum (Rule (1198811 1198812 1198813) 119894) for 119894 = 1 5 (10)
1198811 =1198821 times LU5 (11)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
7 (12)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2 (13)
And model constraints are as follows0 le 1198811 1198812 1198813 le 1
0 le 11988211198822119882311988241198825 le 1
(14)
6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
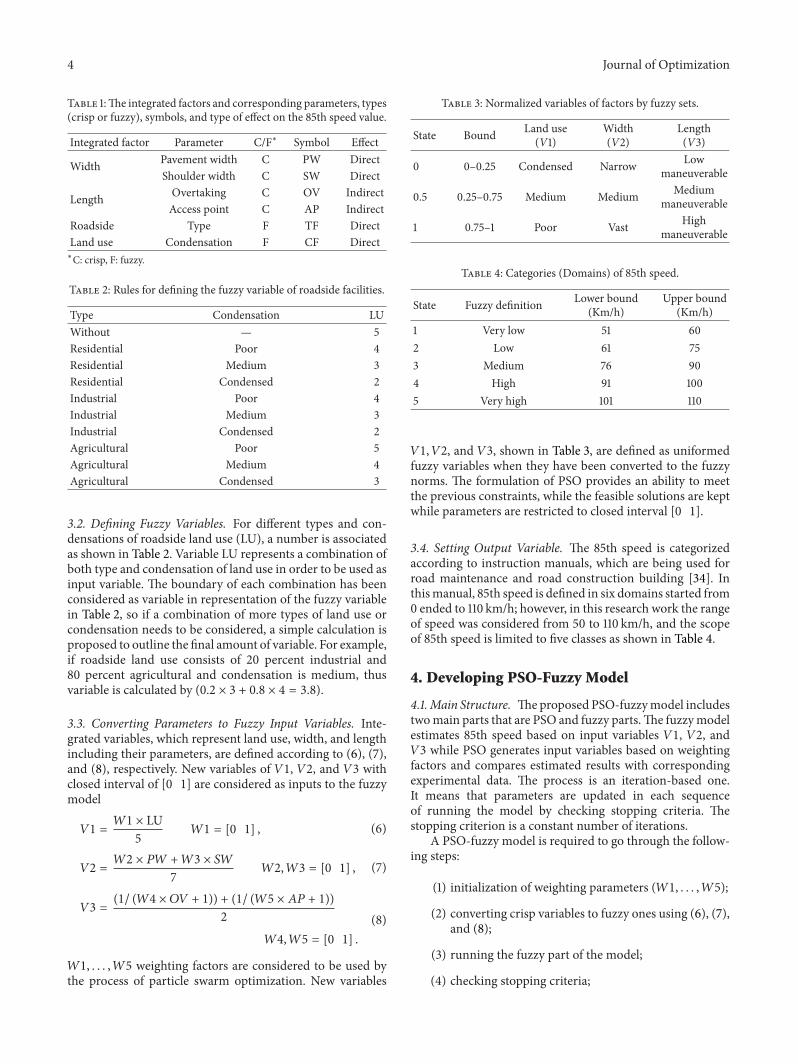
4 Journal of Optimization
Table 1The integrated factors and corresponding parameters types(crisp or fuzzy) symbols and type of effect on the 85th speed value
Integrated factor Parameter CFlowast Symbol Effect
Width Pavement width C PW DirectShoulder width C SW Direct
Length Overtaking C OV IndirectAccess point C AP Indirect
Roadside Type F TF DirectLand use Condensation F CF DirectlowastC crisp F fuzzy
Table 2 Rules for defining the fuzzy variable of roadside facilities
Type Condensation LUWithout mdash 5Residential Poor 4Residential Medium 3Residential Condensed 2Industrial Poor 4Industrial Medium 3Industrial Condensed 2Agricultural Poor 5Agricultural Medium 4Agricultural Condensed 3
32 Defining Fuzzy Variables For different types and con-densations of roadside land use (LU) a number is associatedas shown in Table 2 Variable LU represents a combination ofboth type and condensation of land use in order to be used asinput variable The boundary of each combination has beenconsidered as variable in representation of the fuzzy variablein Table 2 so if a combination of more types of land use orcondensation needs to be considered a simple calculation isproposed to outline the final amount of variable For exampleif roadside land use consists of 20 percent industrial and80 percent agricultural and condensation is medium thusvariable is calculated by (02 times 3 + 08 times 4 = 38)
33 Converting Parameters to Fuzzy Input Variables Inte-grated variables which represent land use width and lengthincluding their parameters are defined according to (6) (7)and (8) respectively New variables of 1198811 1198812 and 1198813 withclosed interval of [0 1] are considered as inputs to the fuzzymodel
1198811 =1198821 times LU5
1198821 = [0 1] (6)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
711988221198823 = [0 1] (7)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2
11988241198825 = [0 1]
(8)
1198821 1198825 weighting factors are considered to be used bythe process of particle swarm optimization New variables
Table 3 Normalized variables of factors by fuzzy sets
State Bound Land use(V1)
Width(V2)
Length(V3)
0 0ndash025 Condensed Narrow Lowmaneuverable
05 025ndash075 Medium Medium Mediummaneuverable
1 075ndash1 Poor Vast Highmaneuverable
Table 4 Categories (Domains) of 85th speed
State Fuzzy definition Lower bound(Kmh)
Upper bound(Kmh)
1 Very low 51 602 Low 61 753 Medium 76 904 High 91 1005 Very high 101 110
11988111198812 and 1198813 shown in Table 3 are defined as uniformedfuzzy variables when they have been converted to the fuzzynorms The formulation of PSO provides an ability to meetthe previous constraints while the feasible solutions are keptwhile parameters are restricted to closed interval [0 1]
34 Setting Output Variable The 85th speed is categorizedaccording to instruction manuals which are being used forroad maintenance and road construction building [34] Inthismanual 85th speed is defined in six domains started from0 ended to 110 kmh however in this research work the rangeof speed was considered from 50 to 110 kmh and the scopeof 85th speed is limited to five classes as shown in Table 4
4 Developing PSO-Fuzzy Model
41Main Structure Theproposed PSO-fuzzymodel includestwomain parts that are PSO and fuzzy partsThe fuzzymodelestimates 85th speed based on input variables 1198811 1198812 and1198813 while PSO generates input variables based on weightingfactors and compares estimated results with correspondingexperimental data The process is an iteration-based oneIt means that parameters are updated in each sequenceof running the model by checking stopping criteria Thestopping criterion is a constant number of iterations
A PSO-fuzzy model is required to go through the follow-ing steps
(1) initialization of weighting parameters (1198821 1198825)
(2) converting crisp variables to fuzzy ones using (6) (7)and (8)
(3) running the fuzzy part of the model
(4) checking stopping criteria
Journal of Optimization 5
01
03
05
07
09
11
0 02 04 06 08 1Domain of input variables
Membership function of inputs
State 0State 05State 1
minus01
Figure 2 Membership functions corresponding to input variables
(5) if stopping criteria are met go to step (7) and showresults
(6) update weighting parameters according to PSO veloc-ity and movement and then go to step (2)
(7) check and compare results with another method
42 Defining Membership Functions and Fuzzy Model Thefirst step of developing the fuzzy model is to define member-ship functions corresponding to input and output variablesInput variables are defined by one-interval domain so atriangular membership function is appropriate to defineinput variables Output variable is defined into five categoriesso a trapezoidal membership function is used to defineoutput variable For each of the three input variables atriangular membership functions is defined [11] Figure 2shows a sample of membership function utilized for inputvariables A trapezoidal membership function is used foroutput variable as shown in Figure 3Theoverall view of fuzzymodel is also shown in Figure 4
43 Rule Definition For this fuzzy model the correspondingrules are defined according to the traffic expertsrsquo pointsof view which explain the relationships between input andoutput variables [11] Since the road width road length andland use have three different states a maximum number of3 times 3 times 3 = 27 rules can be used to define the relationshipbetween input and output variablesThe corresponding statesof the rules are shown in Table 5
44Model Presentation Minimizing the number of incorrectassignment for defined categories of 85th speed is the mainobjective function in the proposedPSO-fuzzymodel Assumethat119873
119898119894is the number of samples assigned to the 119894th category
01
03
05
07
09
11
50 60 70 80 90 100 110Speed domain
Membership function for output
Very lowLowMedium
HighVery high
minus01
Figure 3 Membership function corresponding to 85th speed
Land use
Width
Length
PSO-fuzzy model
85th speed
Inputs Model Output
Figure 4 Overall view of fuzzy model
bymodel and119873119900119894is the observed one then objective function
would be defined according to the following equation
Min 119885 =
5
sum
119894=1
1003816100381610038161003816119873119898119894 minus 1198731199001198941003816100381610038161003816
for 119894 = 1 5 (all speed categories)
Subject to model constraints
(9)
where new variables defined by (6) to (8) will calculate thenormalized variables which are assigned to the 85th speedcategories
119873119898119894 = Sum (Rule (1198811 1198812 1198813) 119894) for 119894 = 1 5 (10)
1198811 =1198821 times LU5 (11)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
7 (12)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2 (13)
And model constraints are as follows0 le 1198811 1198812 1198813 le 1
0 le 11988211198822119882311988241198825 le 1
(14)
6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
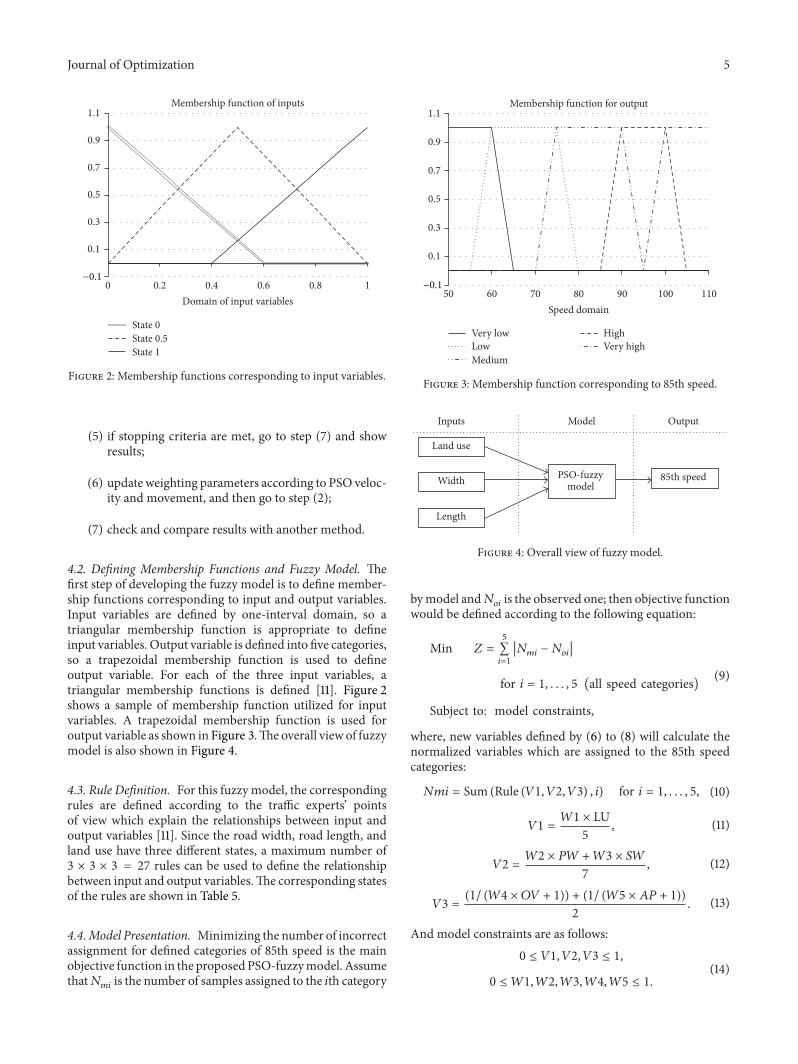
Journal of Optimization 5
01
03
05
07
09
11
0 02 04 06 08 1Domain of input variables
Membership function of inputs
State 0State 05State 1
minus01
Figure 2 Membership functions corresponding to input variables
(5) if stopping criteria are met go to step (7) and showresults
(6) update weighting parameters according to PSO veloc-ity and movement and then go to step (2)
(7) check and compare results with another method
42 Defining Membership Functions and Fuzzy Model Thefirst step of developing the fuzzy model is to define member-ship functions corresponding to input and output variablesInput variables are defined by one-interval domain so atriangular membership function is appropriate to defineinput variables Output variable is defined into five categoriesso a trapezoidal membership function is used to defineoutput variable For each of the three input variables atriangular membership functions is defined [11] Figure 2shows a sample of membership function utilized for inputvariables A trapezoidal membership function is used foroutput variable as shown in Figure 3Theoverall view of fuzzymodel is also shown in Figure 4
43 Rule Definition For this fuzzy model the correspondingrules are defined according to the traffic expertsrsquo pointsof view which explain the relationships between input andoutput variables [11] Since the road width road length andland use have three different states a maximum number of3 times 3 times 3 = 27 rules can be used to define the relationshipbetween input and output variablesThe corresponding statesof the rules are shown in Table 5
44Model Presentation Minimizing the number of incorrectassignment for defined categories of 85th speed is the mainobjective function in the proposedPSO-fuzzymodel Assumethat119873
119898119894is the number of samples assigned to the 119894th category
01
03
05
07
09
11
50 60 70 80 90 100 110Speed domain
Membership function for output
Very lowLowMedium
HighVery high
minus01
Figure 3 Membership function corresponding to 85th speed
Land use
Width
Length
PSO-fuzzy model
85th speed
Inputs Model Output
Figure 4 Overall view of fuzzy model
bymodel and119873119900119894is the observed one then objective function
would be defined according to the following equation
Min 119885 =
5
sum
119894=1
1003816100381610038161003816119873119898119894 minus 1198731199001198941003816100381610038161003816
for 119894 = 1 5 (all speed categories)
Subject to model constraints
(9)
where new variables defined by (6) to (8) will calculate thenormalized variables which are assigned to the 85th speedcategories
119873119898119894 = Sum (Rule (1198811 1198812 1198813) 119894) for 119894 = 1 5 (10)
1198811 =1198821 times LU5 (11)
1198812 =1198822 times 119875119882 +1198823 times 119878119882
7 (12)
1198813 =(1 (1198824 times 119874119881 + 1)) + (1 (1198825 times 119860119875 + 1))
2 (13)
And model constraints are as follows0 le 1198811 1198812 1198813 le 1
0 le 11988211198822119882311988241198825 le 1
(14)
6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Journal of Optimization
Table 5 Rule definition for 85th speed fuzzy model
Rule Land use Width Length Speed1 0 0 0 12 0 0 05 13 0 0 1 24 0 05 0 15 0 05 05 26 0 05 1 37 0 1 0 28 0 1 05 29 0 1 1 310 05 0 0 211 05 0 05 212 05 0 1 313 05 05 0 214 05 05 05 215 05 05 1 316 05 1 0 317 05 1 05 418 05 1 1 419 1 0 0 320 1 0 05 421 1 0 1 422 1 05 0 423 1 05 05 524 1 05 1 525 1 1 0 426 1 1 05 527 1 1 1 5
Rule function in (10) is the result of fuzzy function derivedby Table 5 In the proposed model 1198821 1198825 are PSOparameters which should be estimated and are restricted inclosed interval [0 1] Closed interval [0 1] should be metin order to keep feasibility solutions Other parameters aredefined in Table 1 Iterative procedure of PSO calculates theamount of each parameter in iterations and converge themto the best solution A full model of PSO (1205931 1205932 gt 0) hasbeen developed because Gbest (global optimum) and Pbest(population optimum) are required to be involved in velocitycalculation
Because the convergence speed in the particle swarmoptimization algorithm with the constriction coefficient(convergence agent) is much quicker than inertia factor[30] constriction coefficient by a different structure fromconventional one is used to control velocities via (15) and (16)
1198811198945 = Max (0 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step lt 0(15)
1198811198945 = Min (1 1198811198945 + 1205931 times random times (1198751198945 minus1198821198945) + 1205932
times random times (1198751198925 minus 1198831198945)) if step gt 0(16)
where
Step = (1205931 times random times (119875119894119889 minus 119883119894119889)
+ 1205932 times random times (119875119892119889 minus 119883119894119889)) (17)
A fully connected neighborhood topology has been usedas swarm topology in the model therefore all particles havebeen connected to each other All particles are updated ineach iteration using synchronous method of updating
5 Running PSO-Fuzzy Model
51 Parameter Calculation and Discussion A set of 101experimental data has been used to adjust the PSO-fuzzymodel Data have been practically gathered for speed zonedetermination in another research work [1] but they areavailable for checking the proposed algorithm Although a lotof variables have been gathered in the above research workthe related attributes are used to check the performance ofproposed algorithm The objective function is the accuracyof the model and the percentage of correct assignment ofthe speed values to the whole observations is defined asaccuracy of the model The error corresponding to the inputset of data has been reduced by changing the weighingfactors as optimization variables The number of iterationsand population size are two main parameters affecting theimprovement of the model They have significant roles infinding the best values for weighing factors For each pop-ulation size and iteration number the means of the resultscorresponding to five times of running are shown in Table 6This table shows that the population size of 100 and theiteration number of 200 to 500 are sufficient for an accuracyof 96 No more improvement has been observed whenthe numbers of iteration and population size are increasedResults also revealed that the population size and iterationnumber dramatically change the parameters and accuracy Itmeans that using PSOmay be a good technique for parametertuning in these kinds of objective functions
52 Comparison with Exponential Model In order to com-pare the accuracy of results a conventional method ofexponential regression model for parameter estimation hasbeen used In this model if the effects of independentvariables on dependent variable are power based the modelis called exponential regression Parameters are calculatedbased on the minimum of mean or total square errorsbetween observations and model outputs [35] In this modelindependent variables119883
1 1198832 119883
119899and dependent variable
119884 are estimated by the following equation
119884 = 1205730times exp (120573
11198831) times exp (120573
21198832) times sdot sdot sdot times exp (120573
119899119883119899)
(18)
In this equation coefficients 1205730 1205731 1205732 1205733 and 120573
119899are
estimated through minimization of mean or total square
Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Optimization 7
Table 6 Results of running PSO-fuzzy model of 85th speed
Population size Iteration number Parameters Accuracy (percent)W1 W2 W3 W4 W5
100 0623 0725 0302 0498 0423 9120 200 0615 0749 0294 0514 0427 93
500 0684 0771 0286 0519 0408 94100 0649 0789 0246 0515 0424 93
50 200 0632 0779 0244 0512 0418 94500 0682 0808 0254 0567 0434 95100 0598 0805 0213 0532 0402 95
100 200 0610 0817 0204 0543 0398 96500 0622 0844 0212 0569 0389 96
errors between observations and model outputs [36] Param-eters have been estimated for experimental data using solveroption in Microsoft Excel and model has been formulated as(19)
Speed = 110028 times 11989000899119875119882 times 119890000295119878119882 times 119890minus00991119874119881
times 119890minus00160119860119875
times 11989000596119879119877times 119890minus00845119862119877
(19)
The accuracy of exponential model was 84 while that ofproposed PSO-fuzzymodel was 96which reveals that PSO-fuzzy model is a more accurate model to estimate 85th speedof vehicles in intercity roads There are two main reasonsto achieve better accuracy The first is using new variablesdefined as 1198811 1198812 and 1198813 in Section 33 and the second isdeveloping a nonlinear structures which are utilized in othertechniques such as neural network approved in other studies[37]
6 Summary and Conclusion
In this paper a PSO-fuzzy model has been developed andutilized to determine the category of the 85th speed ofvehicles in undivided intercity roads Roadside facilities (landuse) width and length characteristics of roads are consideredas input variables and the category of 85th speed as outputvariable to the fuzzy model respectively New definitionsof input variables for fuzzy model have been proposed tocombine crisp and fuzzy variables in the model Input vari-ables were converted to normalized format using weightingfactors which are estimated by particle swarm optimizationtechnique Fully neighborhood particles are considered astopology while constriction coefficient is used for velocitylimitation in synchronous method of updating particles
A set of 101 experimental data has been used for tunningthe weighting factors (PSO parameters) Results show thatthe algorithm of combining PSO and Fuzzy as well as andnew definition of input variables integrating with the crispand fuzzy variables is capable of estimating the category of85th speed of the road passing vehiclesThe developedmodelis capable of estimating the 85th speed with a high accuracyof 96 while conventional method of exponential regressionestimates speed categories corresponding to the experimentaldata with an accuracy of 84
Results also reveal that the model is sensitive to pop-ulation size and iteration number which are basically usedby PSO algorithm As population size and iteration numberbecame larger better results are achieved Landuse parameterand pavement width represented by weighting factor1198821 and1198822 respectively have significant effect on 85th speed Thepercentage of forbidden overtaking represented by 1198824 hasindirect effect on 85th speed However its effect is not as largeas the effects of the land use and pavement width Shoulderwidth and number of access points represented by1198823 and1198825 respectively have less effect on 85th speed It also showsthat pavement width is more important to driversrsquo speed thanshoulder width as well as the number of access points plays aless significant role on 85th speed
For future researches it is recommended to develop amore complicated fuzzy model in order to apply more inputvariables such as awareness campaigns and enforcementactivities In addition the developed fuzzy model may beutilized for all types of the roads particularly for divided roadsand freeways
References
[1] Transportation Research Institute Andishe Rahian GostareshldquoCalibration of zoning speed limit in rural roadsrdquo Report no 12007
[2] G A Rezai Rad and J Mohamadi ldquoVehicle speed estimationbased on the imagerdquo in Proceedings of the 4th InternationalConference Sciences of Electronic Technologies of Informationand Telecommunications pp 1ndash5 2007 Hammamet TunisiaMarch 2007
[3] A Hussain K Shahzad and C Tang ldquoReal time speed esti-mation of vehiclesrdquoWorld Academy of Science Engineering andTechnology vol 61 pp 726ndash730 2012
[4] L H Martin ldquoEstimating vehicle speed from traffic count andoccupancy datardquo Journal of Data Science vol 2 pp 231ndash2442004
[5] S I Manjari Gupta and A Bhattacharyya ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 2004
[6] D Bauer P Buhler N Donath et al ldquoEmbedded vehicle count-ing system with ldquosilicon retinardquo optical sensorrdquo inWorkshop onInformation Optics Toledo Spain 2006
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
8 Journal of Optimization
[7] N Kasem A Kosba and M Youssef ldquoAn RF-based vehicledetection and speed estimation systemrdquo in Proceedings of the75th IEEE Vehicular Technology Conference (IEEE VTC rsquo12)Yokohama Japan 2012
[8] Y U Ali P Huei and H E Tseng ldquoA study on lateralspeed estimation methodsrdquo International Journal of VehicleAutonomous Systems vol 2 no 1-2 pp 126ndash144 2004
[9] P Augural Fuzzy Model for Estimating of Passenger Car UnitNational Institute of Technology Information Science andApplication Kurukshetra India 2008
[10] P Panetta J Poj and N Nanokchai Evaluation of RoadTrafficCongestionUsing Fuzzy Techniques KingMongkut SouthUniversity of Technology Thonburi Thailand 2008
[11] P Pongpaibool P Jangmchil and N Noodwong Evaluation ofRoad Traffic Congestion Using Fuzzy Techniques King MongkutSouth University of Technology Thonburi Thiland 2008
[12] L Ruey-Hsun T Sheng-Ren C Yie-Tone and T Wan-TsunldquoOptimal power flow by a fuzzy based hybrid particle swarmoptimization approachrdquo Electric Power Systems Research vol 81no 7 pp 1466ndash1474 2011
[13] L Wang and C Singh ldquoBalancing risk and cost in fuzzyeconomic dispatch including wind power penetration based onparticle swarm optimizationrdquo Electric Power Systems Researchvol 78 no 8 pp 1361ndash1368 2008
[14] S Manna R H Kenneth M El-Halwagi R Longari andM Gentile Development of Hierarchical Fuzzy Model for theEvolution of Inherent Safety Universidad de las AmericasPueblea Mexico 2004
[15] C Yang S Fan Z Wang and W Li ldquoApplication of fuzzycontrol method in a tunnel lighting systemrdquoMathematical andComputer Modelling vol 54 no 3-4 pp 931ndash937 2011
[16] S Hoogendoorn S L Hoogendoorn andH Schuurman FuzzyPerspective in Traffic Engineering Delft university of technologyand Ministry of Transport Delft The Netherlands 2000
[17] Y Lu J Hinze and Q Li ldquoDeveloping fuzzy signal detectiontheory for workersrsquo hazard perception measures on subwayoperationsrdquo Safety Science vol 49 no 3 pp 491ndash497 2011
[18] E Bagheri M Feizi F Enson and F Behnia Novel FuzzyControl Model of Traffic Light Timing at an Urban IntersectionDepartment of Computer Science University of New Bran-swick Prediction Canada 2004
[19] J L Castro M Delgado J Medina and M D Ruiz-LozanoldquoAn expert fuzzy system for predicting object collisions Itsapplication for avoiding pedestrian accidentsrdquo Expert Systemswith Applications vol 38 no 1 pp 486ndash494 2011
[20] G Ficili andD Panno ldquoA fuzzy algorithm for combined controlof traffic parameters assessment and key issuesrdquo ComputerCommunications vol 22 no 3 pp 199ndash210 1999
[21] C F Juang and C Y Wang ldquoA self-generating fuzzy systemwith ant and particle swarm cooperative optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 5362ndash5370 2009
[22] I H Kuo S J Horng T W Kao T L Lin C L Lee and YPan ldquoAn improved method for forecasting enrollments basedon fuzzy time series and particle swarm optimizationrdquo ExpertSystems with Applications vol 36 no 3 pp 6108ndash6117 2009
[23] H Liu A Abraham and A E Hassanien ldquoScheduling jobs oncomputational grids using a fuzzy particle swarm optimizationalgorithmrdquo Future Generation Computer Systems vol 26 no 8pp 1336ndash1343 2010
[24] Y L Huang S J Horng M He et al ldquoA hybrid forecastingmodel for enrollments based on aggregated fuzzy time series
and particle swarm optimizationrdquo Expert Systems with Applica-tions vol 38 no 7 pp 8014ndash8023 2011
[25] F Valdez P Melin O Castillo and O Montiel ldquoA new evo-lutionary method with a hybrid approach combining particleswarm optimization and genetic algorithms using fuzzy logicfor decision makingrdquo in Proceedings of the IEEE Congress onEvolutionary Computation (CEC rsquo08) pp 1333ndash1339 June 2008
[26] A Robati G A Barani H Nezam Abadi Pour M J Fadaeeand J Rahimi Pour Anaraki ldquoBalanced fuzzy particle swarmoptimizationrdquo Applied Mathematical Modelling vol 36 no 5pp 2169ndash2177 2012
[27] L Zhao F Qian Y Yang Y Zeng and H Su ldquoAutomaticallyextracting T-S fuzzymodels using cooperative random learningparticle swarm optimizationrdquo Applied Soft Computing Journalvol 10 no 3 pp 938ndash944 2010
[28] F Valdez P Melin and O Castillo ldquoAn improved evolution-ary method with fuzzy logic for combining Particle SwarmOptimization andGenetic AlgorithmsrdquoApplied Soft ComputingJournal vol 11 no 2 pp 2625ndash2632 2011
[29] J Kennedy and R Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 December 1995
[30] Q Bai ldquoAnalysis of particle swarm optimization algorithmrdquoComputers and Information Science vol 3 no 1 pp 180ndash1842010
[31] J Kennedy ldquoParticle swarm social adaptation of knowledgerdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo97) pp 303ndash308 IEEE Press April1997
[32] M Clerc and J Kennedy ldquoThe particle swarm-explosion sta-bility and convergence in a multidimensional complex spacerdquoIEEE Transactions on Evolutionary Computation vol 6 no 1pp 58ndash73 2002
[33] S Ghosh D Kundu K Suresh et al ldquoOn some properties of thelbest topology in particle swarm optimizationrdquo in Proceedingsof the 9th International Conference on Hybrid Intelligent Systems(HIS rsquo09) pp 370ndash375 August 2009
[34] Iranian Management and Planning Organization Road SafetyInstruction Manual vol 3ndash7 no 267 1st edition 2005
[35] P G Hoel Elementary Statistics John Wiley and Sons NewYork NY USA 4th edition 1976
[36] G A F Seber and C J Wild Nonlinear Regression John Wileyamp Sons New York NY USA 1989
[37] AMahmoudabadi ldquoComparison of weighted and simple linearregression and artificial neural network models in freewayaccidents predictionrdquo in Proceeding of the 2nd InternationalConference on Computer and Network Technology pp 392ndash396Bangkok Thailand April 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of





























