Embed Size (px)
Citation preview
Repository of examples
V2 9/3/08
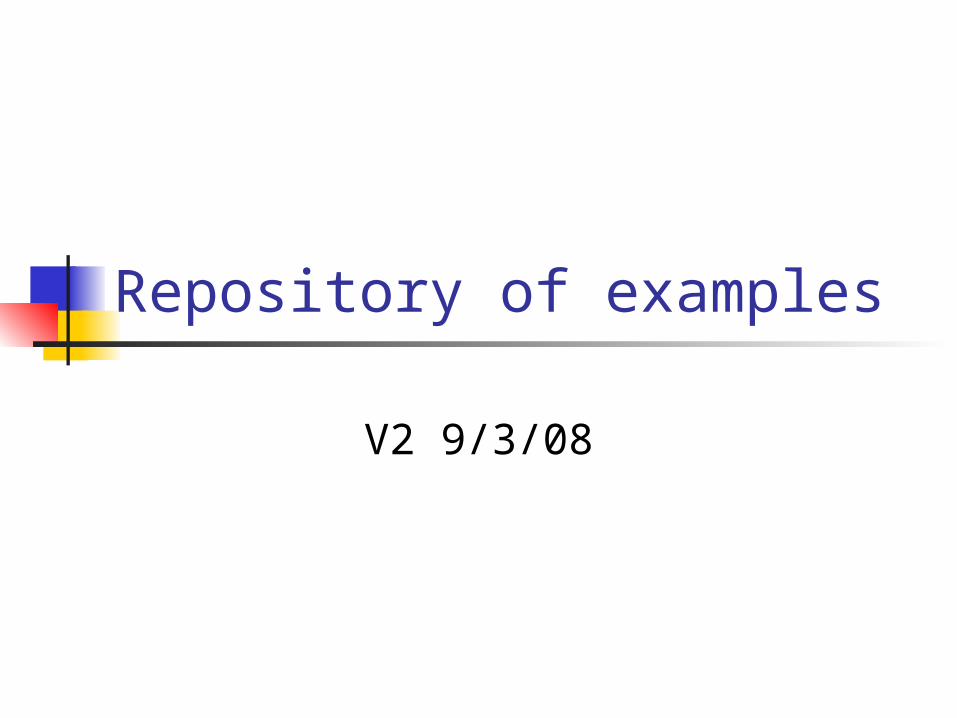
1 – The TinyTurtle Subjects
Math, geometry, procedural programming, basic robotics
Language NXT-G
State Developed
Description The basic Logo turtle with its
main 4 motion commands It uses parameterized user blocks
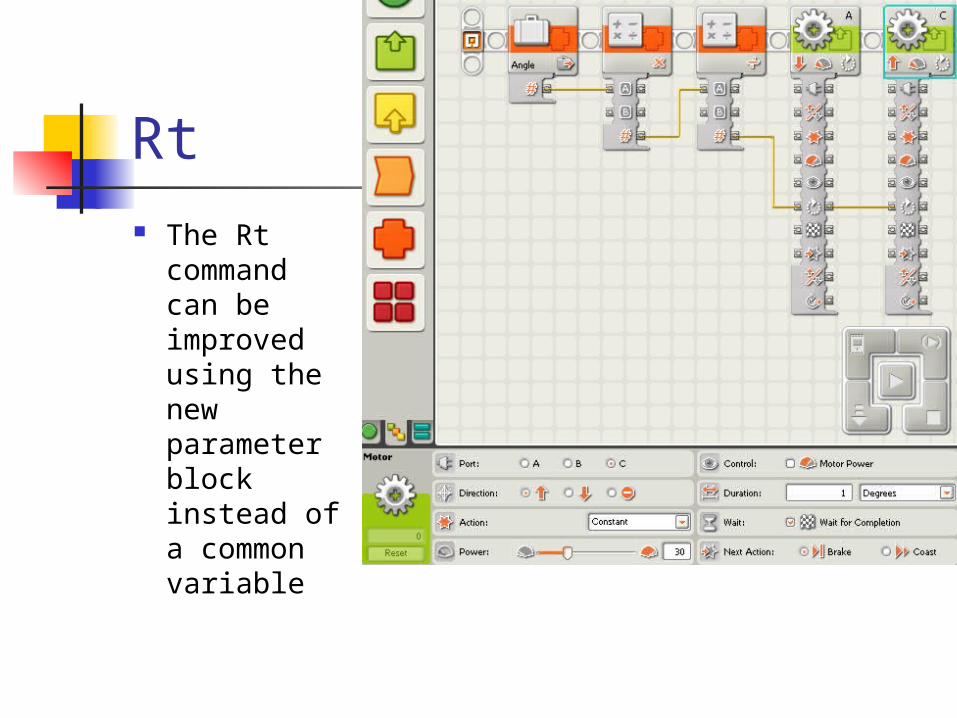
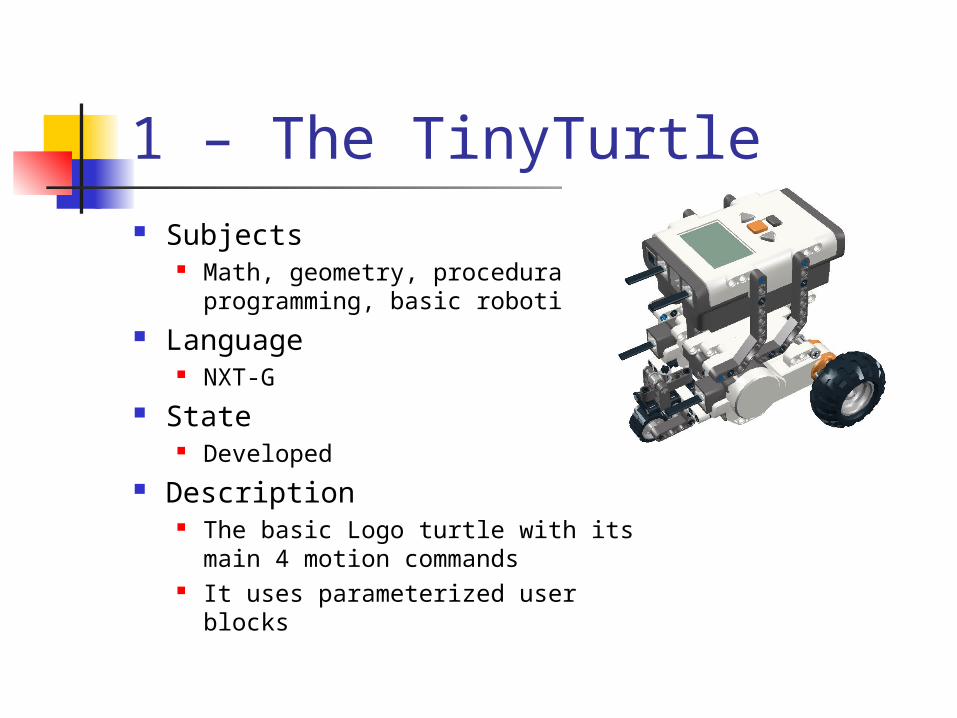
Rt The Rt
command can be improved using the new parameter block instead of a common variable
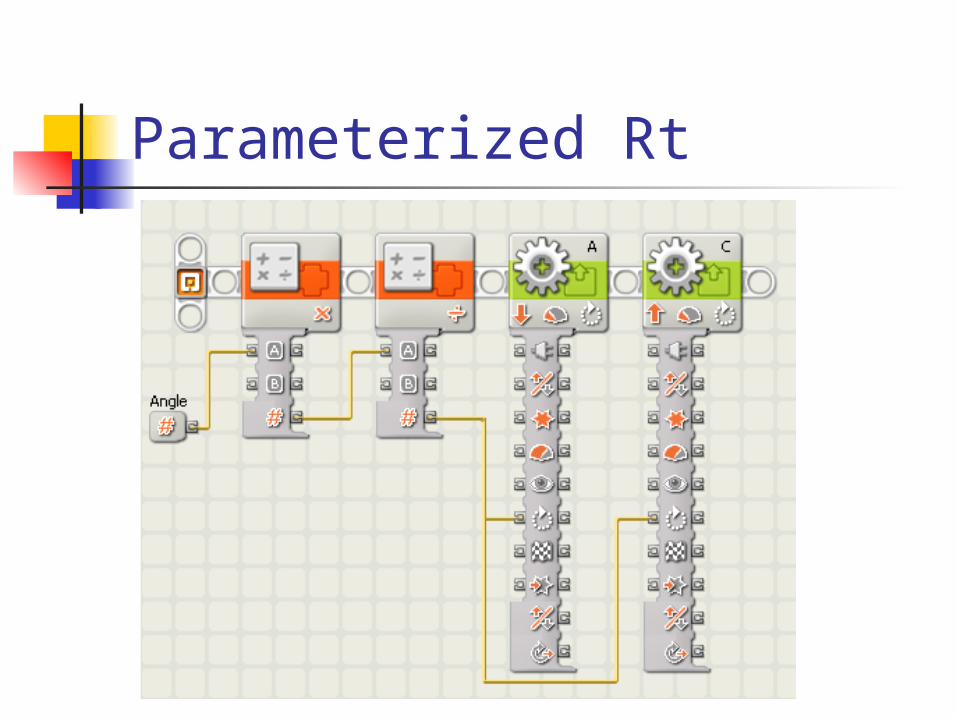
Parameterized Rt
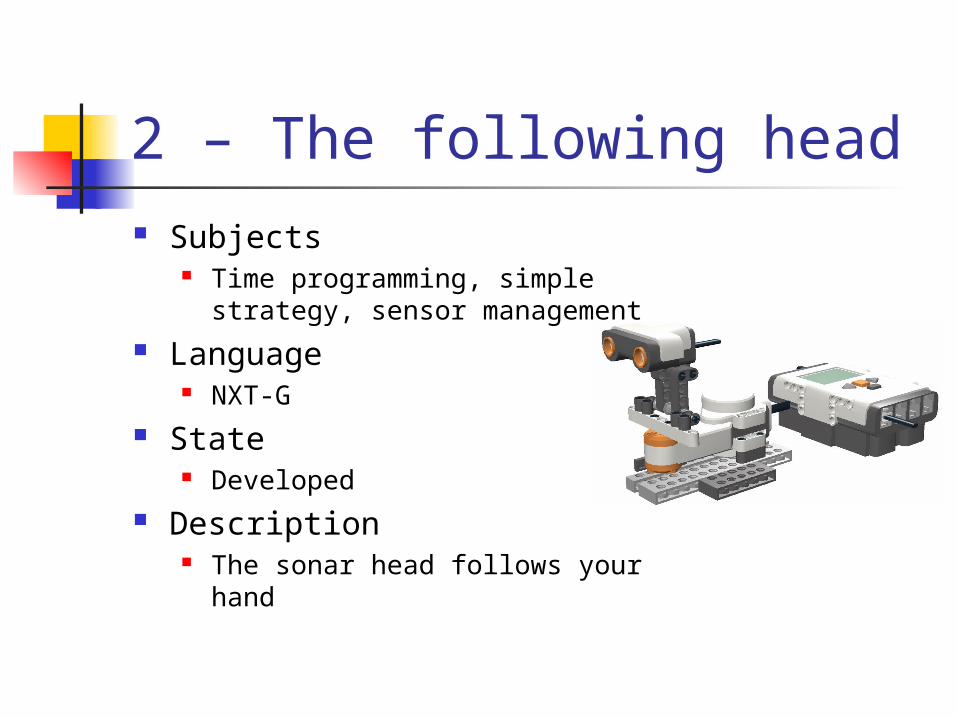
2 – The following head Subjects
Time programming, simple strategy, sensor management
Language NXT-G
State Developed
Description The sonar head follows your
hand
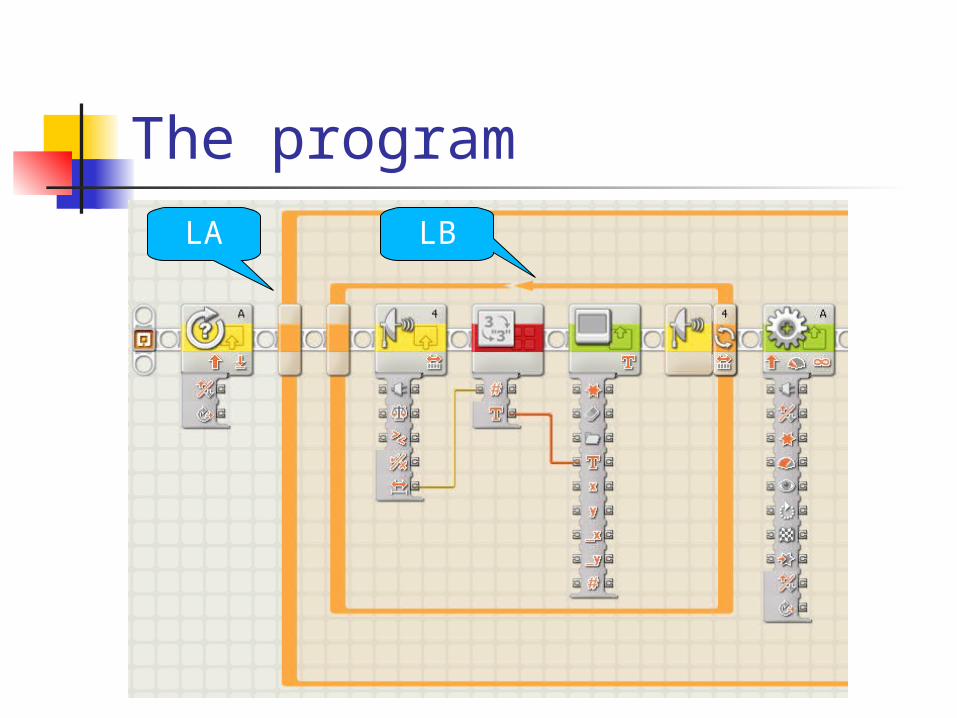
The program
LA LB
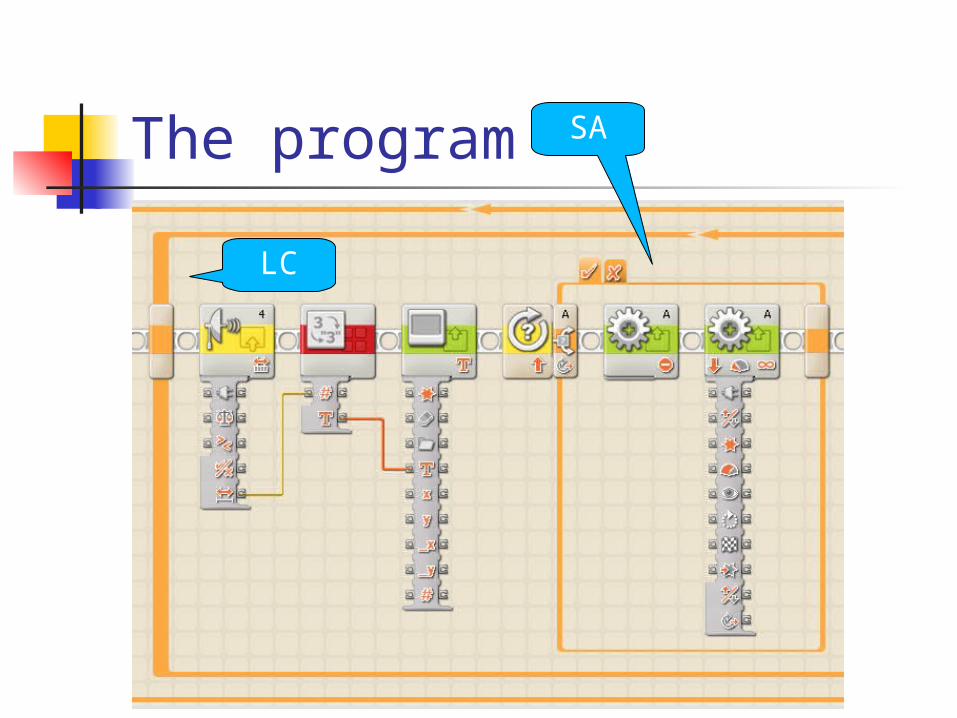
The program
LC
SA
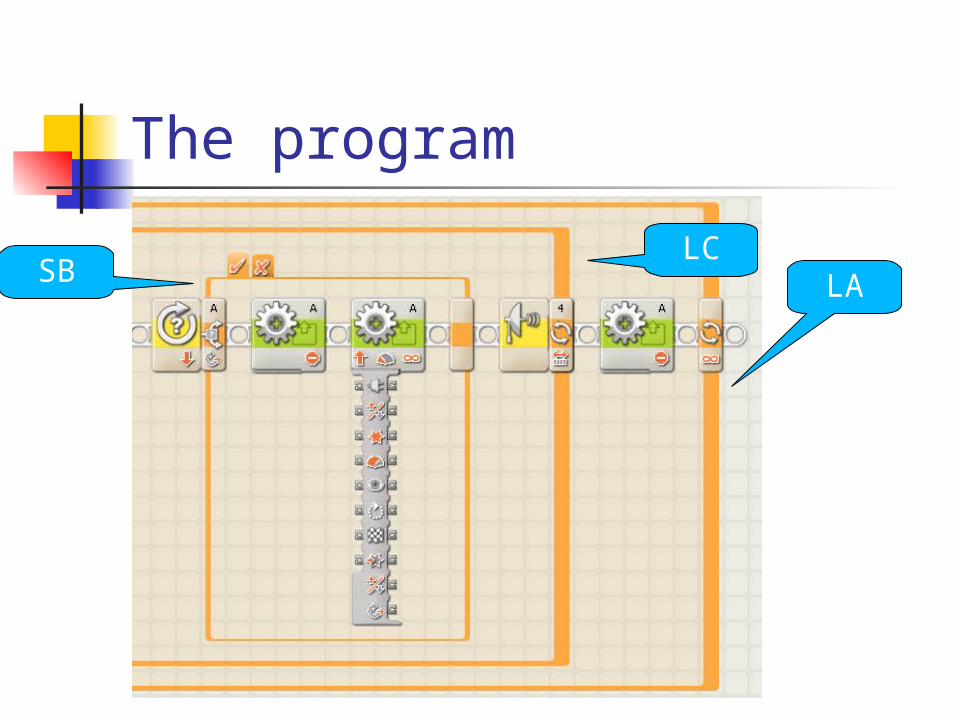
The program
SB LALC
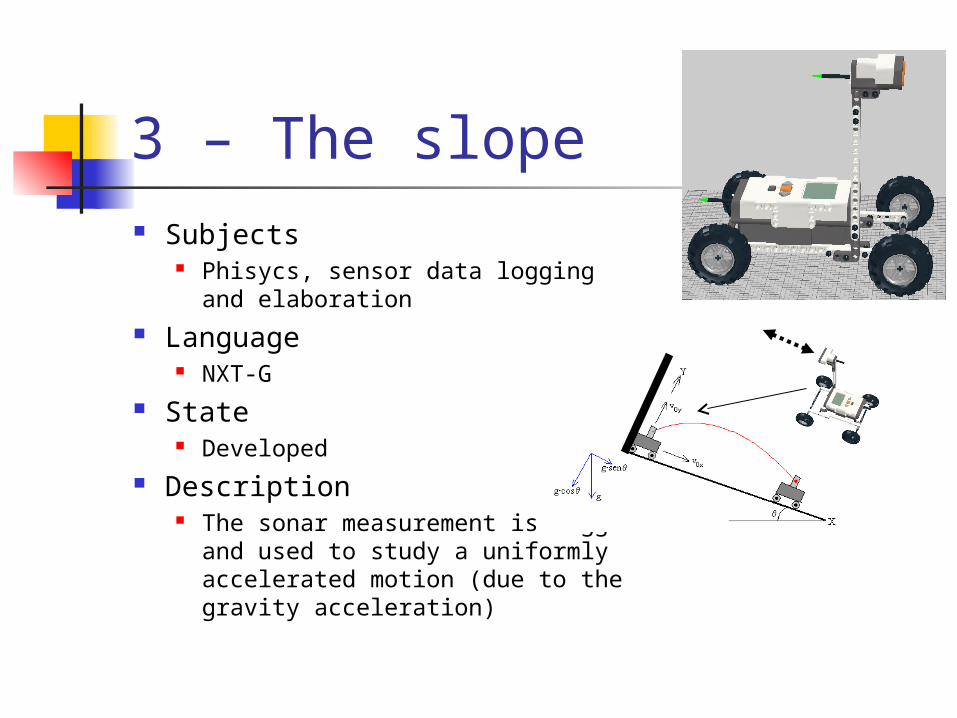
3 – The slope Subjects
Phisycs, sensor data logging and elaboration
Language NXT-G
State Developed
Description The sonar measurement is logged
and used to study a uniformly accelerated motion (due to the gravity acceleration)
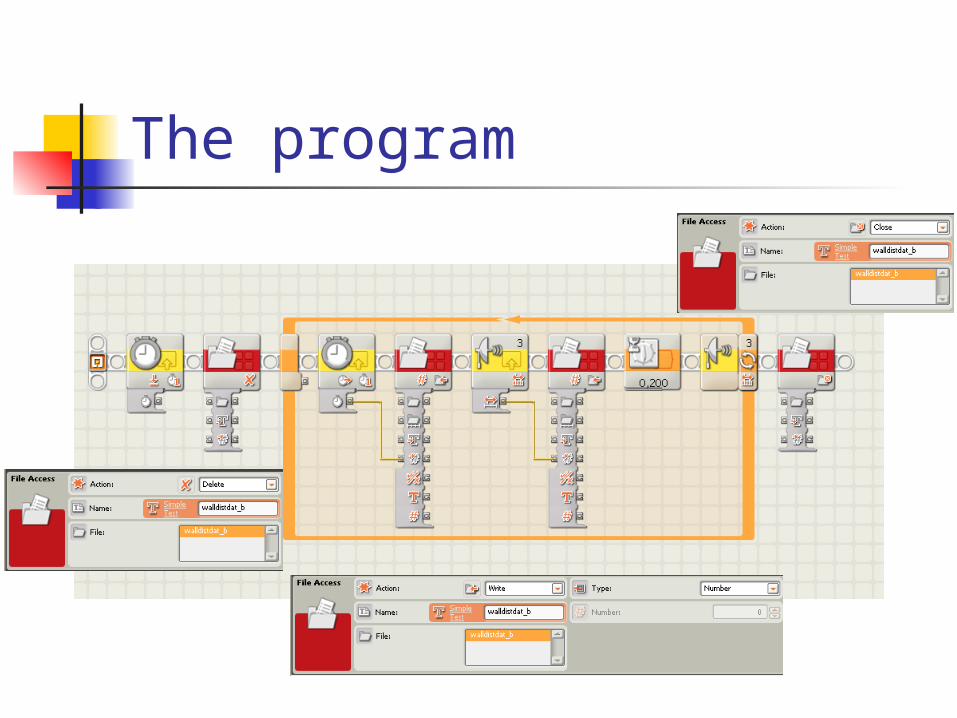
The program
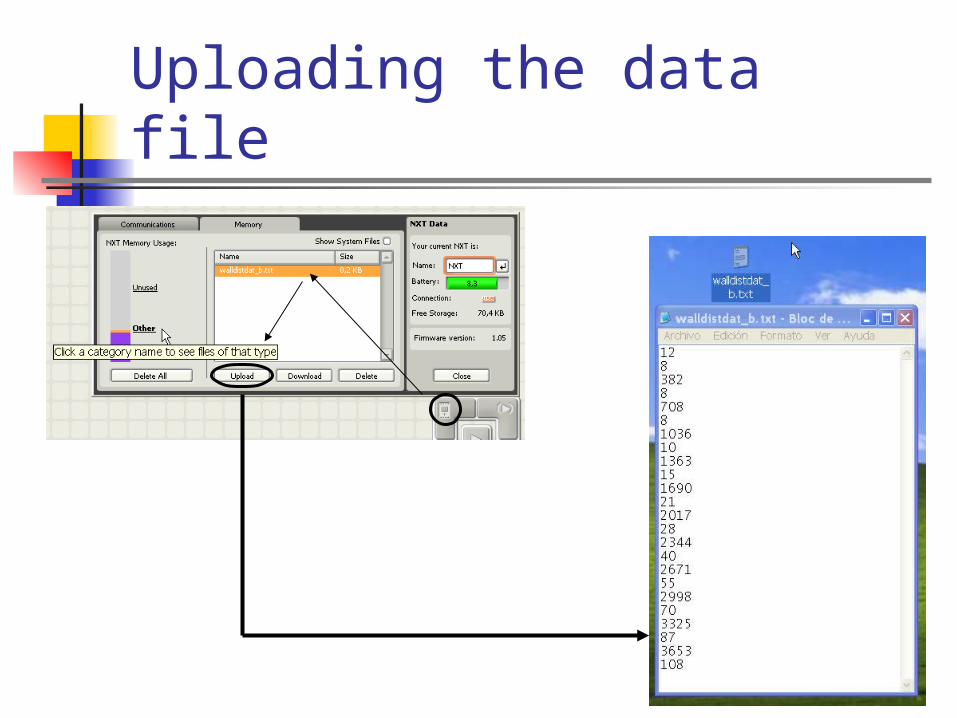
Uploading the data file
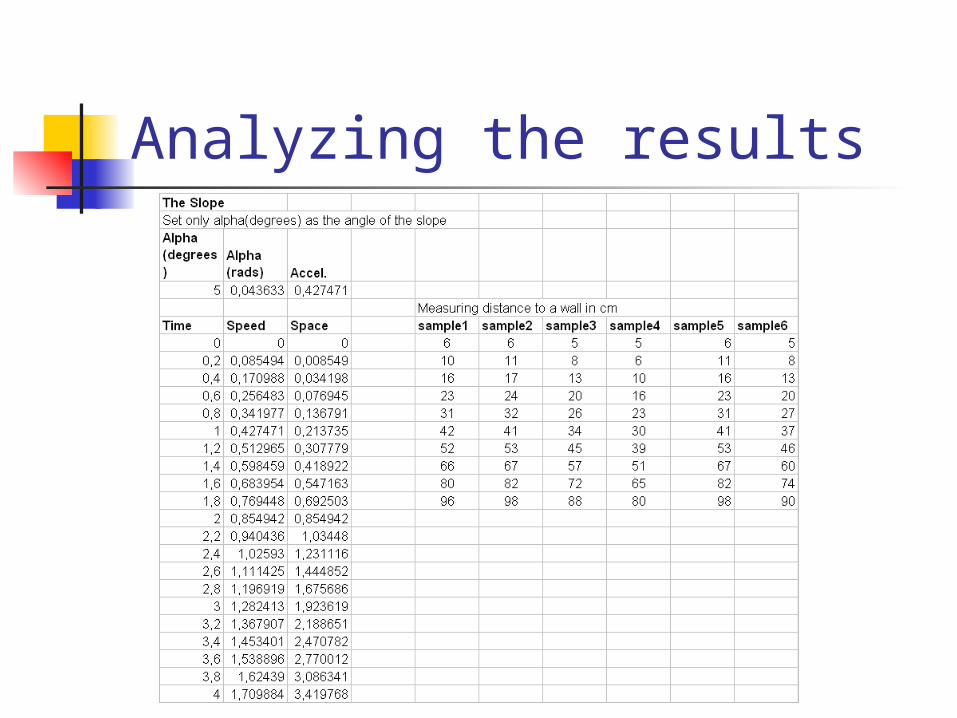
Analyzing the results
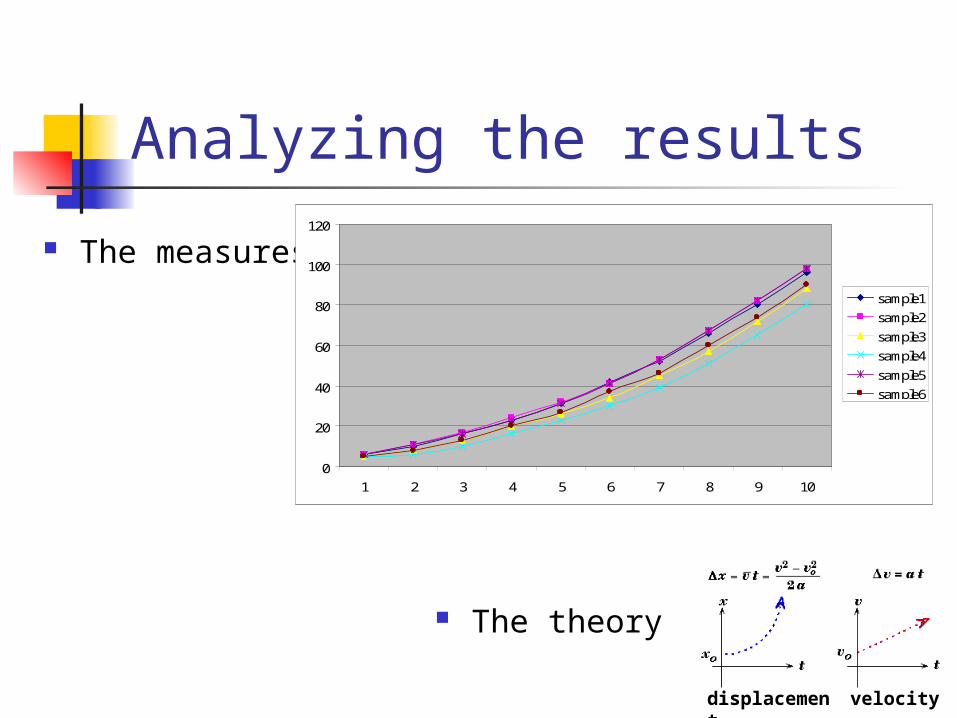
Analyzing the results
The measures
The theory
0
20
40
60
80
100
120
1 2 3 4 5 6 7 8 9 10
sample1
sample2
sample3
sample4
sample5
sample6
displacement velocity
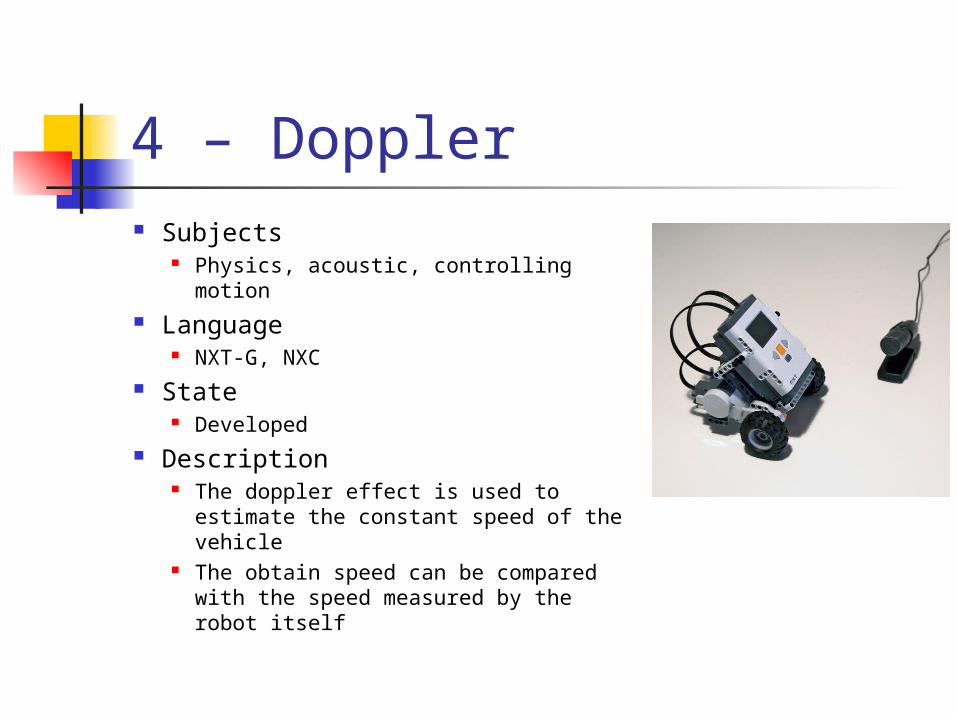
4 – Doppler Subjects
Physics, acoustic, controlling motion Language
NXT-G, NXC State
Developed Description
The doppler effect is used to estimate the constant speed of the vehicle
The obtain speed can be compared with the speed measured by the robot itself
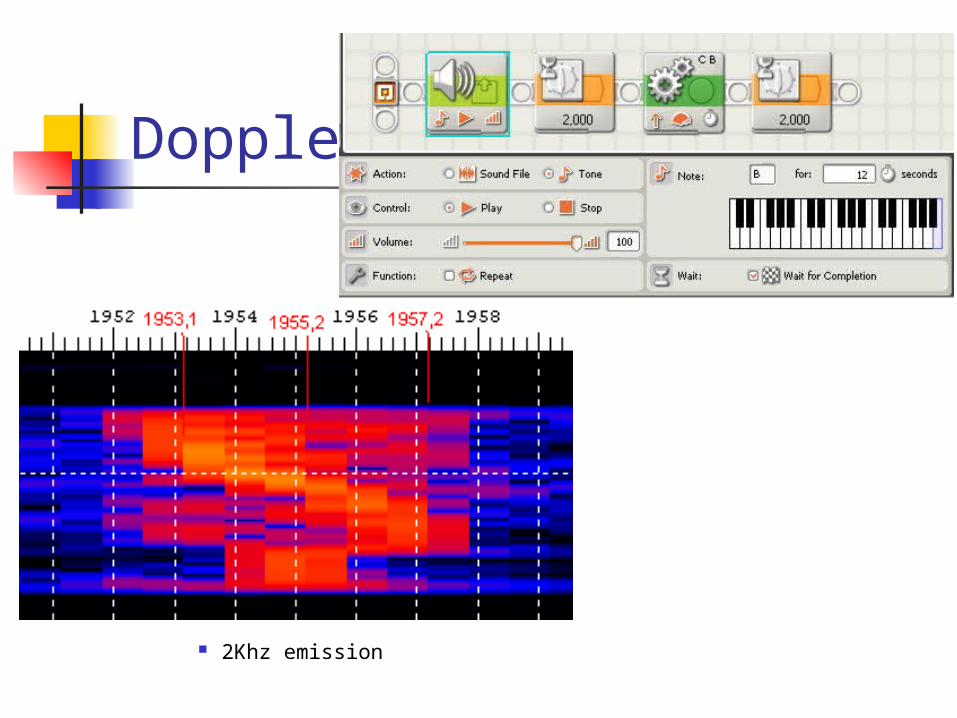
Doppler
2Khz emission
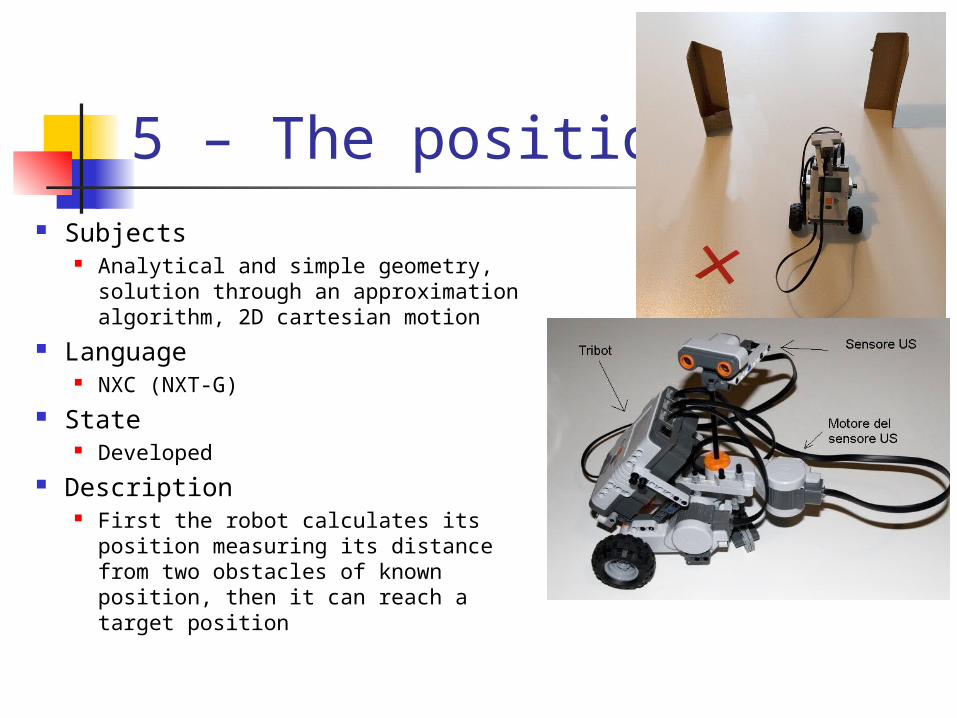
5 – The positioner Subjects
Analytical and simple geometry, solution through an approximation algorithm, 2D cartesian motion
Language NXC (NXT-G)
State Developed
Description First the robot calculates its position
measuring its distance from two obstacles of known position, then it can reach a target position
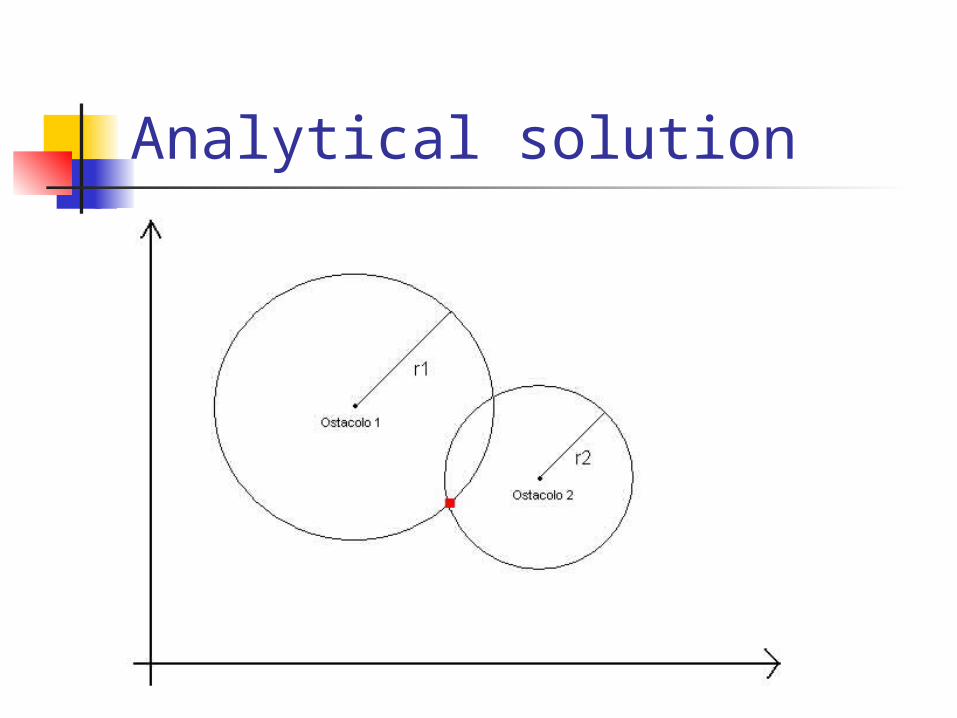
Analytical solution
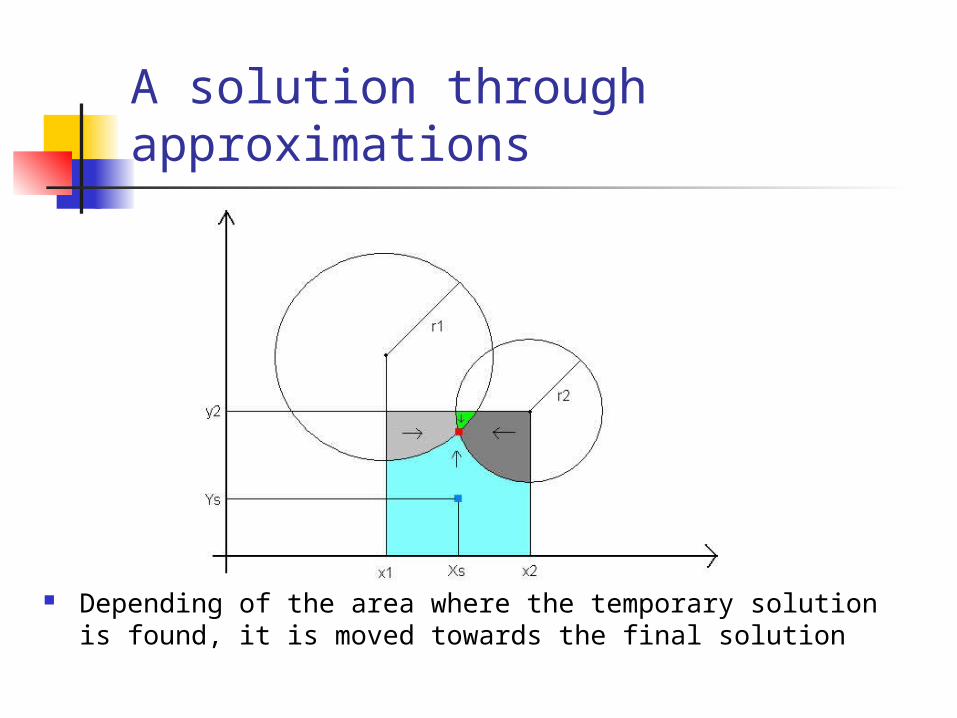
A solution through approximations
Depending of the area where the temporary solution is found, it is moved towards the final solution
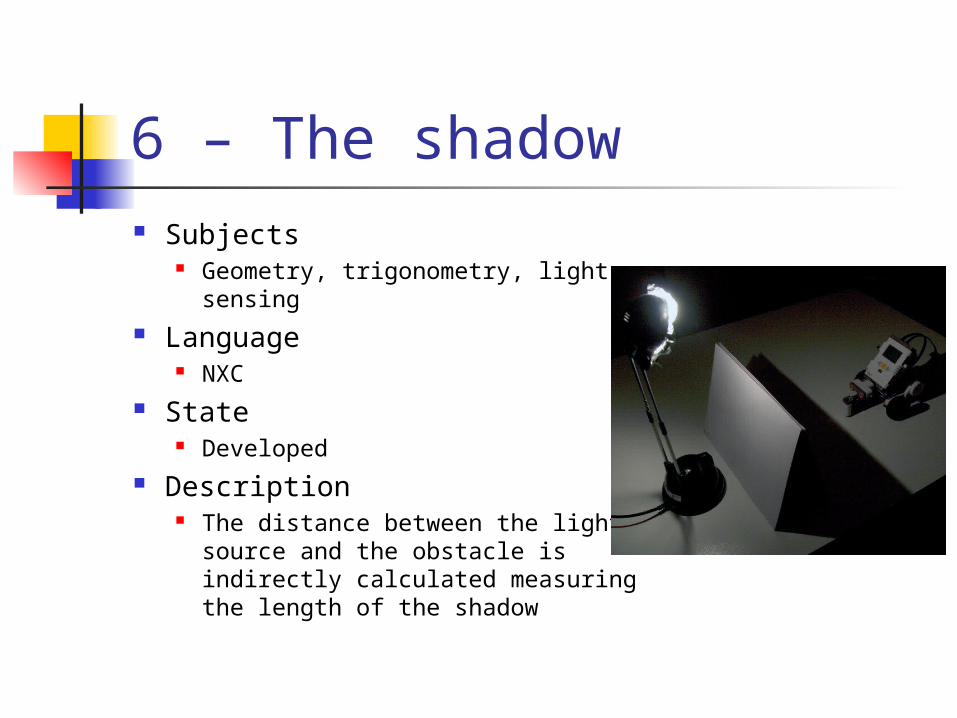
6 – The shadow Subjects
Geometry, trigonometry, light sensing
Language NXC
State Developed
Description The distance between the light
source and the obstacle is indirectly calculated measuring the length of the shadow
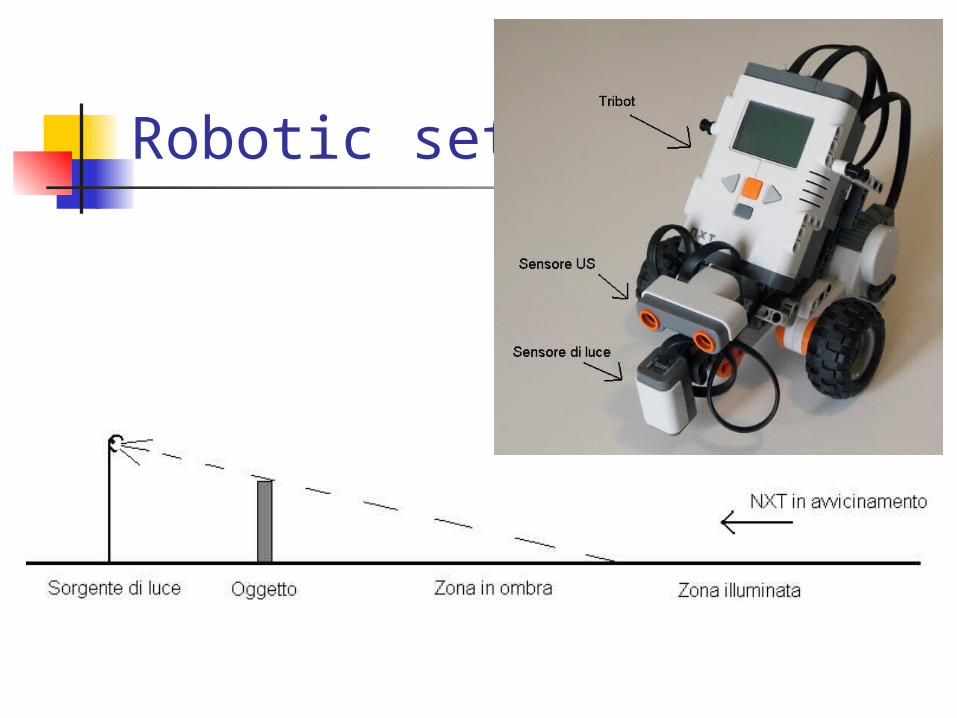
Robotic setup
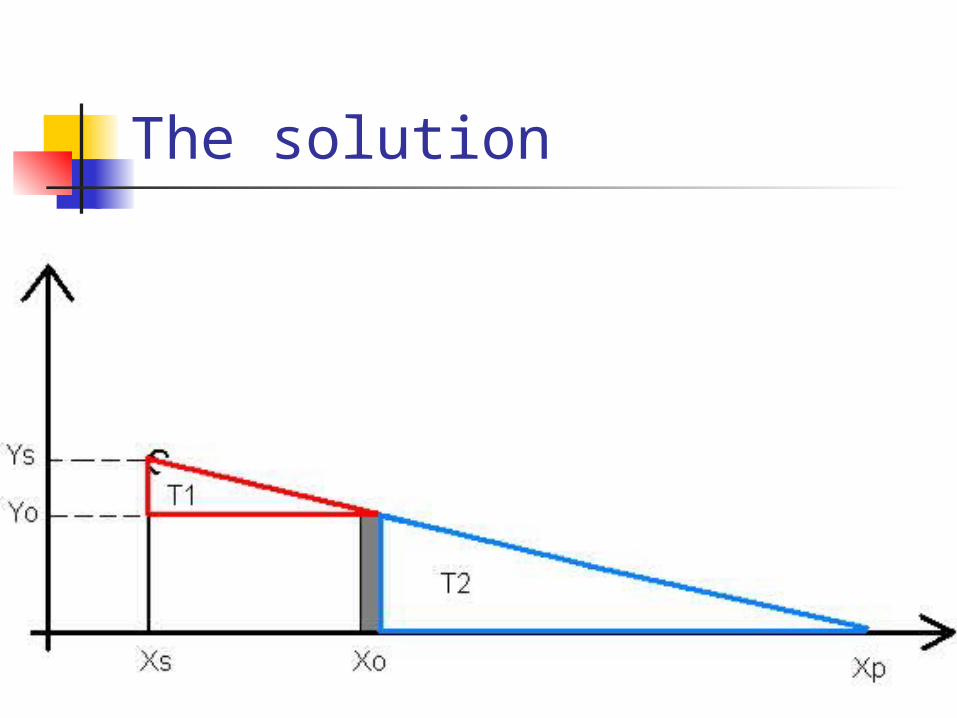
The solution
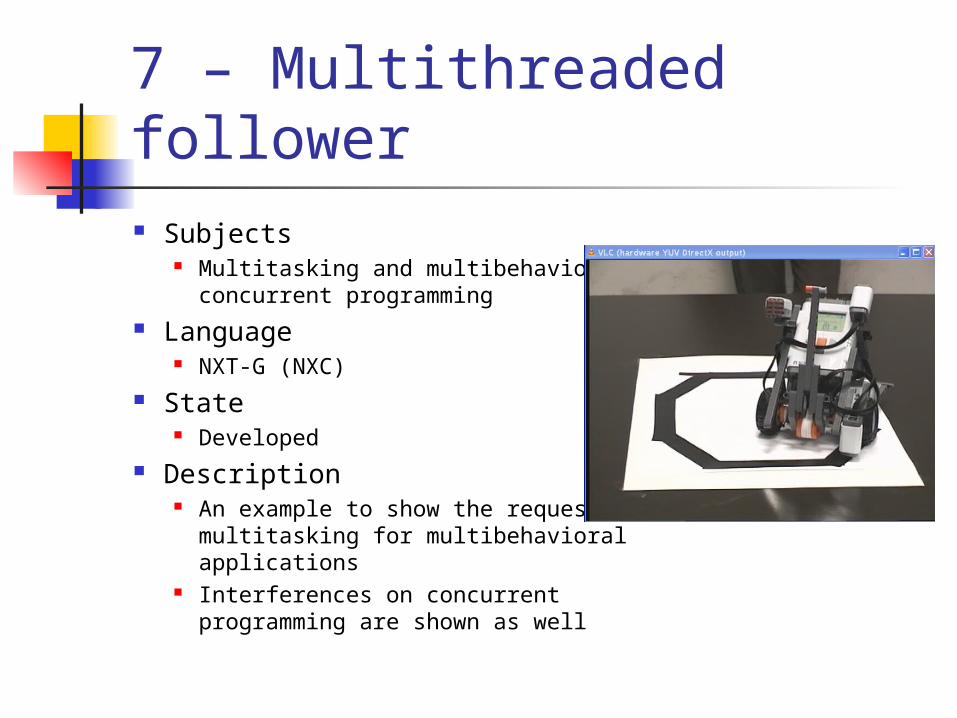
7 – Multithreaded follower Subjects
Multitasking and multibehavior, concurrent programming
Language NXT-G (NXC)
State Developed
Description An example to show the request of
multitasking for multibehavioral applications
Interferences on concurrent programming are shown as well
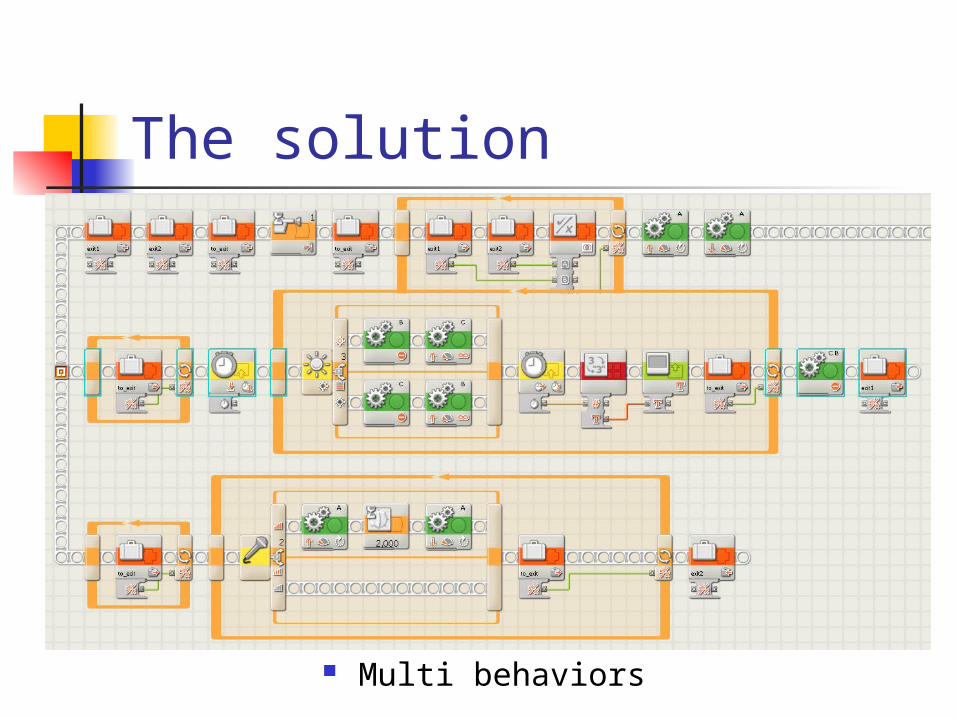
The solution
Multi behaviors
8 – Discovery Bool Subjects
Logic, Boolean algebra Language
NXC, NXT-G State
Under development Description
Discovering basic boolean operator through the motion of the robot
9 – Turing-bot Subjects
Theoretical computer science, simulation
Language NXC?
State Under development
Description Simulation of the Turing
machine
10 – Happy strings Subjects
Theoretical computer science, simulation, formal grammars and linguistic
Language NXC?
State Under development
Description Using a finite state automata
simulation (the robot physically moves from state to state) to recognize string properties
11 – Scaling?? Subjects
Geometry, Topography Language
?? State
Under development Description
The robot reproduces something using a given scale
12 – Easy proportions?? Subjects
Math, Geometry Language
?? State
Under development Description
A proportion (like 6:5=12:10) is given in terms of the length of the edges of a couple of rectangles
The robot verifies some properties ???
13 – Friend/Sister gravity Subjects
Math, physics Language
?? State
Under development Description
How to discover the gravity acceleration
14 – Trees Subjects
Computer science, theoretical infrmatics
Language ??
State Under development
Description The robot physically calculates
the width of a tree (as a data structure)
15 – Kind spring Subjects
Math, physics Language
?? State
Under development Description
How to calculate the elongation constant of a spring
16 – Intelligent interpreter Subjects
Artificial intelligence, coding Language
NXC State
Under development Description
A trained neural network is used to recognize ‘linear’ symbols like the Morse code that are translated in simple robot commands
17 – Bee-bot Subjects
Natural science, behaviors and strategies
Language NXT-G
State Developed
Description Using a light sensor, the robotic
bee try to find a ‘flower’ (a black area on the plane) following wider and wider paths
Alveare
Thank you for your attention
n – ?? Subjects
?? Language
?? State
Developed Description
?? ??