Embed Size (px)
Citation preview

SEP SES DGEST
pág. 0
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INSTITUTO TECNOLÓGICO DE APIZACO
INGENIERÍA MECATRÓNICA
MATERIA:
CONTROL DE MAQUINAS ELECTRICAS
CATEDRÁTICO:
DR. ROBERTO MORALES CAPORAL
“REPORTE FINAL DE PROYECTO”
CONTROL DE VELOCIDAD DE UN MOTOR DE C.A “TRIFASICO Y MONOFASICO”
ALUMNOS:
CABRERA GARCÍA DANIEL
LIMA PALACIOS MARÍA DEL ROSARIO
MELÉNDEZ SANTAMARÍA JOEL
RAMÍREZ ALVA MIGUEL ÁNGEL
INDICE
1. INTRODUCCION ………………………………………… pág. 2
2. PLANTEAMIENTO DEL PROBLEMA ……….….……..… pág. 3
3. JUSTIFICACION ………………….………………….…... pág. 3
4. OBJETIVO GENERAL ………………………………...… pág. 4
5. OBJETIVOS ESPECIFICOS…………………………....… pág. 4
6. FUNDAMENTO TEORICO …………..………..………...... pág. 4
7. DESARROLLO………………………………………………pag.12
8. CONCLUSIONES……………………………………………pag.17
9. BIBLIOGRAFIA …………………………………...…….… pág.17
pág. 1
INTRODUCCIÓN
Hasta hace algunos años, cuando se necesita variar velocidad de accionamientos, se recurría a sistemas mecánicos o a motores de corriente continua. Los avances de la electrónica y su abaratamiento fueron desplazando los sistemas mecánicos, por el costo de su mantenimiento, a favor del motor de corriente continua controlado electrónicamente.Control del motor es un término genérico que significa muchas cosas, desde un simple interruptor de paso hasta un complejo sistema con componentes tales como relé, control de tiempo e interruptor. Sin embargo, la función común es la misma en cualquier caso: esto es, controlar alguna operación del motor eléctrico. Por lo tanto, al seleccionar e instalar equipo de control para un motor se debe considerar una gran cantidad de diversos factores a fin de que pueda funcionar correctamente junto a la máquina para la que se diseña.
Aplicados a los motores, los controles realizan varias funciones, tales como las de arranque, aceleración, regulación de velocidad, regulación de potencia, protección, inversión y parada.Dado que la mayoría de las máquinas utilizadas en la industria están movidas por motores asíncronos alimentados por corriente alterna trifásica, en este apartado daremos unas ideas muy generales y básicas de este tipo de motores.Como toda máquina eléctrica, los motores asíncronos constan de dos partes fundamentales y distintas:
El estator.- Es la parte fija del motor. Está constituido por una carcasa en la que está fijada una corona de chapas de acero al silicio provistas de unas ranuras. Los bobinados de sección apropiada están dispuestos en dichas ranuras formando las bobinas que se dispondrán en tantos circuitos como fases tenga la red a la que se conectará la máquina.
El rotor.- Es la parte móvil del motor. Está situado en el interior del estator y consiste en un núcleo de chapas de acero al silicio apiladas que forman un cilindro, en el interior del cual se dispone un bobinado eléctrico. Los tipos más utilizados son:
1. Rotor de jaula de ardilla2. Rotor bobinado.
A este tipo de motores se les denomina motores de inducción debido a que su funcionamiento se basa en la interacción de campos magnéticos producidos por
pág. 2
corrientes eléctricas. En el caso de los motores a los que hace referencia estas notas, las corrientes que circulan por el rotor son producidas por el fenómeno de inducción electromagnética, conocido comúnmente como ley de Faraday.
PLANTEAMIENTO DEL PROBLEMA
En los países desarrollados los motores eléctricos consumen cerca del 70% del total de la energía eléctrica generada. Sin embargo, las deficiencias en el diseño de las máquinas eléctricas y el funcionamiento generalizado de motores de regímenes inadecuados hacen que cerca del 40% de la energía consumida por ellos se disipe en forma de pérdidas. De todos los motores que existen en el mundo, el 98% de ellos son de la clase asíncronosAdemás el rango normal de operación de un motor de inducción típico está confinado a menos de 5% de deslizamiento y la variación de la velocidad en ese rango es más o menos proporcional a la carga sobre el eje del motor. Aún si el deslizamiento fuera mayor, la eficiencia del motor sería muy pobre puesto que las pérdidas en el cobre del rotor son directamente proporcionales al deslizamiento del motor.
JUSTIFICACIÓN
Los costos elevados del control de máquinas como antes se realizaba es una de las razones por las cuales se ha revolucionado las aplicaciones por control electrónico, la viabilidad, confiabilidad y reducción de espacio así como la precisión del control son aquellas ventajas que se obtienen con los controles electrónicos. Dichos controles permitirán la regulación de velocidad del motor.
OBJETIVO GENERAL
pág. 3
Realizar el control de velocidad de una máquina de Corriente Alterna Monofasica para motores de potencias mayores a ½ KW.Aplicados a los motores, los controles realizan varias funciones, tales como las de regulación de velocidad para lograr la optimización de muchos procesos.
OBJETIVOS ESPECIFICOS
Se hablara de control de velocidad, algunos controladores puede mantener velocidades muy precisas para propósitos industriales, y también existen controladores capaces de cambiar gradualmente la velocidad La velocidad variable es una necesidad en todos los sectores de la industria, pues permite:
El control de la producción de un proceso o de un sistema con el gasto mínimo de energía y de materia prima.
Bajo diversas técnicas se podrá lograr el objetivo deseado que se verán al culminar el trabajo presente
Optimizar el rendimiento de la maquina en el proceso
FUNDAMENTO TEORICO
“TECNICAS DE CONTROL DE VELOCIDAD”
CONTROL DE VELOCIDAD EN MOTORES
La velocidad variable es una necesidad en todos los sectores de la industria, pues
permite el control de la producción de un proceso o de un sistema con el gasto
mínimo de energía y de materia prima. También es útil en aplicaciones de
domótica, tales como el control de calderas, ventilación y aire acondicionado. A
continuación hablaremos del control de velocidad en motores de corriente alterna.
CONTROL DE VELOCIDAD EN MOTORES DE CORRIENTE ALTERNA
pág. 4
Hasta hace algunos años, cuando se necesita variar velocidad de accionamientos,
se recurría a sistemas mecánicos o a motores de corriente continua. Los avances
de la electrónica y su abaratamiento fueron desplazando los sistemas mecánicos,
por el costo de su mantenimiento, a favor del motor de corriente continua
controlado electrónicamente. Sin embargo este tipo de motor requiere
mantenimiento periódico, como el cambio de escobillas y rectificación de colector,
que insume costo y tiempo afectando fuertemente los procesos industriales
continuos tales como petroquímicos, siderúrgicos, etc.
Sin duda el motor más barato y confiable de la industria es el motor de inducción.
Al acoplársele un sistema electrónico de control de velocidad, se obtienen las
mismas prestaciones de un motor de corriente continua, esto es, control de culpa
de arranque, velocidad, aceleración y posibilidad de realizar frenado regenerativo.
CAMBIO DEL NUMERO DE POLOS
Este método es antiguo (1897) y se basa en el hecho de que el número de polos
en los devanados estatóricos de un motor de inducción se puede cambiar con
facilidad en relación 2:1 con solo efectuar simples cambios en la conexión de las
bobinas. Al variar los polos, se produce un funcionamiento relativamente
satisfactorio puesto se ha variado el número de polos tanto del estator como del
rotor. Los motores de inducción algunos poseen devanados estatóricos,
específicamente diseñadas para la variación de polos mediante los métodos de
conmutación manual y/o automática, en que los diversos devanados estatóricos
primarios se conectan en combinación serie paralelo.
Cuando la conexión en una de las dos bobinas se invierte, los dos son polos norte
y el flujo magnético retorna al estator en puntos intermedios entre las dos bobinas.
Los polos sur son llamados polos consecuentes y el devanado es ahora de cuatro
polos.
pág. 5
Como método de control de velocidad solo puede utilizarse para producir
velocidades relativamente fijas (600, 900, 1200 o 1800 RPM) para un motor de
inducción cuya velocidad varia solo ligeramente (del 2 a 8%) desde vacío a plena
carga.
La variación polar como método de control de la velocidad presenta las siguientes
ventajas:
1. Elevado rendimiento a cualquier ajuste de la velocidad,
2. Buena regulación de la velocidad para cualquier ajuste de la misma
3. Simplicidad de control en la obtención de cualquier velocidad determinada
mediante la conmutación manual o automática
4. Reguladores de velocidad auxiliares asociados al motor relativamente
barato.
La variación polar se emplea, primordialmente, donde se desee obtener la
versatilidad de dos o cuatro velocidad relativamente constantes que estén
ampliamente separadas.
Sus mayores inconvenientes son:
1. Se requiere un motor especial, que posea los devanados necesarios y los
terminales llevados al exterior del estator para intercambio de polos
2. No puede conseguirse un control gradual y continuo de la velocidad
CONTROL DEL VOLTAJE DE LINEA
El par del motor (cupla) de inducción bajo condiciones de arranque y de marcha
varía con el cuadrado del voltaje aplicado al primario del estator. Para una carga
determinada, reduciendo el voltaje de línea se reducirá el par con el cuadrado de
la reducción del voltaje de línea, y la reducción del par producirá un incremento del
deslizamiento.
Aunque reducir el voltaje de línea y el par como método de incrementar el
deslizamiento servirá para controlar la velocidad hasta cierto grado en motores
pág. 6
monofásicos de fase partida, particularmente, y en motores de inducción
pequeños, en general, resulta el método menos satisfactorio de control de la
velocidad para motores polifásicos, ya que el par máximo a la mitad del voltaje
nominal es un cuarto del mismo a dicha tensión nominal. Por lo tanto, no es
posible obtener el par normal, ni siquiera la mitad del mismo, porque la velocidad
del motor disminuye rápidamente y este se para antes de que pueda desarrollar el
par normal. Entonces, para que este método funcione, es necesario que el par de
carga reduzca considerablemente a medida que se reducen el voltaje y la
velocidad en el estator; por lo que funcionara de forma aceptable en un motor
parcialmente cargado.
La velocidad del motor puede ser controlada en un rango limitado, variando el
voltaje de línea. Este método de control de velocidad de utiliza a veces para
manejar pequeños motores de ventilación.
CONTROL TENSION-FRECUENCIA
Variando la frecuencia de las tensiones aplicadas a las bobinas del estator,
cambia la velocidad sincrónica de la máquina. La variación de la frecuencia afecta
proporcionalmente las reactancias de magnetización y dispersión en el circuito
equivalente, pero las resistencias se mantienen aproximadamente constantes,
considerando que el efecto pelicular es poco pronunciado. Para que la densidad
de flujo magnético se mantenga prácticamente constante y en los límites de
diseño de la máquina, es conveniente variar la amplitud de la tensión de
alimentación en la misma proporción que se varía la frecuencia. De esta forma, la
magnitud del par eléctrico es similar a la que se obtiene a frecuencia nominal, pero
la velocidad es variable.
Se presentan las características par eléctrico-velocidad para una máquina de
inducción alimentada mediante cuatro frecuencias diferentes, manteniendo
pág. 7
constante la relación entre la amplitud de la tensión y la frecuencia de
alimentación. Si la variación de la frecuencia es lenta en comparación con la
inercia del conjunto máquina-carga mecánica, la corriente se reduce con respecto
a un arranque directo. También es posible mantener cualquier punto de operación
intermedio, aumentando o reduciendo la velocidad. Operando a baja frecuencia,
se incrementa el par de arranque, pero el par máximo de la máquina es
prácticamente constante, siempre y cuando las reactancias sean mucho mayores
que las resistencias del modelo.
VARIADOR DE FRECUENCIA
Teniendo en cuenta los conceptos anteriores un variador de frecuencia (siglas
VFD, del inglés: Variable Frequency Drive o bien AFD Adjustable Frequency
Drive), es un sistema para el control de la velocidad rotacional de un motor de
corriente alterna (AC) por medio del control de la frecuencia de alimentación
suministrada al motor. Un variador de frecuencia es un caso especial de un
variador de velocidad. Los variadores de frecuencia son también conocidos como
drivers de frecuencia ajustable (AFD), drivers de CA, microdrivers o inversores.
Estamos convenientemente puede ajustar la velocidad de un motor cambiando la
frecuencia aplicada al motor. Se puede ajustar la velocidad del motor mediante el
ajuste del número de polos, pero esto es un cambio físico en el motor. Sería
necesario rebobinar, y dar lugar a un cambio de ritmo a la velocidad.
Los dispositivos variadores de frecuencia operan bajo el principio de que la
velocidad síncrona de un motor de corriente alterna (CA) está determinada por la
frecuencia de CA suministrada y el número de polos en el estator, de acuerdo con
la relación:
RPM=120×fp
Donde
pág. 8
RPM = Revoluciones por minuto
f = frecuencia de suministro CA (Hercio)
p = Número de polos (adimensional)
Las cantidades de polos más frecuentemente utilizadas en motores síncronos o en
Motor asíncrono son 2, 4, 6 y 8 polos que, siguiendo la ecuación citada, resultarían
en 3000 RPM, 1500 RPM, 1000 RPM y 750 RPM respectivamente para motores
sincrónicos únicamente y a la frecuencia de 50 Hz. Dependiendo de la ubicación
geográfica funciona en 50Hz o 60Hz.
En los motores asíncronos las revoluciones por minuto son ligeramente menores
por el propio asincronismo que indica su nombre. En estos se produce un desfase
mínimo entre la velocidad de rotación (RPM) del rotor (velocidad "real" o "de
salida") comparativamente con la cantidad de RPM's del campo magnético (las
cuales si deberían cumplir la ecuación arriba mencionada tanto en Motores
síncronos como en motores asíncronos) debido a que sólo es atraído por el campo
magnético exterior que lo aventaja siempre en velocidad (de lo contrario el motor
dejaría de girar en los momentos en los que alcanzase al campo magnético).
El controlador de dispositivo de variación de frecuencia está formado por
dispositivos de conversión electrónicos de estado sólido. El diseño habitual
primero convierte la energía de entrada CA en CC usando un puente rectificador.
La energía intermedia CC es convertida en una señal quasi-senoidal de CA
usando un circuito inversor conmutado. El rectificador es usualmente un puente
trifásico de diodos, pero también se usan rectificadores controlados. Debido a que
la energía es convertida en continua, muchas unidades aceptan entradas tanto
monofásicas como trifásicas (actuando como un convertidor de fase, un variador
de velocidad).
Diagrama de Variador de frecuencia con Modulación de Ancho de Pulso (PWM).
pág. 9
Tan pronto como aparecieron los interruptores semiconductores fueron
introducidos en los VFD, ellos han sido aplicados para los inversores de todas las
tensiones que hay disponible. Actualmente, los transistores bipolares de puerta
aislada (IGBTs) son usados en la mayoría de circuitos inversores.
Las características del motor CA requieren la variación proporcional del voltaje
cada vez que la frecuencia es variada. Por ejemplo, si un motor está diseñado
para trabajar a 460 voltios a 60 Hz, el voltaje aplicado debe reducirse a 230 volts
cuando la frecuencia es reducida a 30 Hz. Así la relación voltios/hertzios deben
ser regulados en un valor constante (460/60 = 7.67 V/Hz en este caso). Para un
funcionamiento óptimo, otros ajustes de voltaje son necesarios, pero
nominalmente la constante es V/Hz es la regla general. El método más novedoso
y extendido en nuevas aplicaciones es el control de voltaje por PWM.
Hay cuatro tipos generales de control de velocidad, que dependen de los
requisitos de la máquina:
CONTROL DE VELOCIDAD SEGÚN LOS REQUISITOS DE LA MAQUINA
Hay cuatro tipos generales de control de velocidad, que dependen de los
requisitos de la máquina:
CONTROL DE VELOCIDAD CONSTANTE
Muchas máquinas requieren una reducida aceleración durante el arranque y luego
una velocidad constante en funcionamiento. Este tipo de control de velocidad se
puede obtener mediante el arranque a tensión reducida en el caso de motor de
jaula, de rotor devanado o sincrónico. Sin embargo habrá que tener en cuenta que
el arranque a tensión reducida da también invariablemente un par reducido de
arranque.
pág. 10
CONTROL DE VARIAS VELOCIDADES
Este tipo de control difiere solo ligeramente del de velocidad regulable en que
usualmente no se requiere cambiar la velocidad bajo carga. El motor de jaula de
varias velocidades es muy adecuado para esta clase de servicio.
CONTROL DE VELOCIDAD PREDETERMINADA
Este tipo de control a máquina es acelerada pasando los escalones necesarios de
velocidad hasta alcanzar una velocidad de funcionamiento pre ajustada. Los
motores de jaula de varias velocidades y los de rotor devanado son adecuados
para este tipo de servicio.
DESARROLLO
pág. 11
Para la variación de la velocidad del motor se utilizara el rotary push button y los
switches, el programara será cargado en el PIC indicando a la frecuencia en que
se encuentra nuestro motor.
Este control se emplea cuando el motor debe funcionar a distintas velocidades a
voluntad del operador. El mejor medio de obtener este tipo de control es mediante
el uso de un motor de rotor devanado con control rotórico o bien el uso de un
motor de c.a. del tipo de colector. Este tipo de control requiere que se pueda variar
la velocidad bajo carga.
Los elementos necesarios para realizar el control son un optoacoplador un detector de cruce por cero y un triac a continuación de dará una breve explicación de su funcionamiento y para que serán utilizados.
DETECTOR DE CRUCE POR CERO
Se refiere al punto en donde una señal de corriente alterna pasa de ser positiva a ser negativa (o viceversa) en su gráfica. También se puede definir como el punto instantáneo en donde el voltaje es cero. La grafica de un cruce por cero en una onda senoidal:
Un detector de cruce por cero, entonces, detecta la transición de cambio de signos de una señal. Idealmente, proporciona un pequeño pulso que coincide con el tiempo en el que el voltaje de la señal alterna es cero.
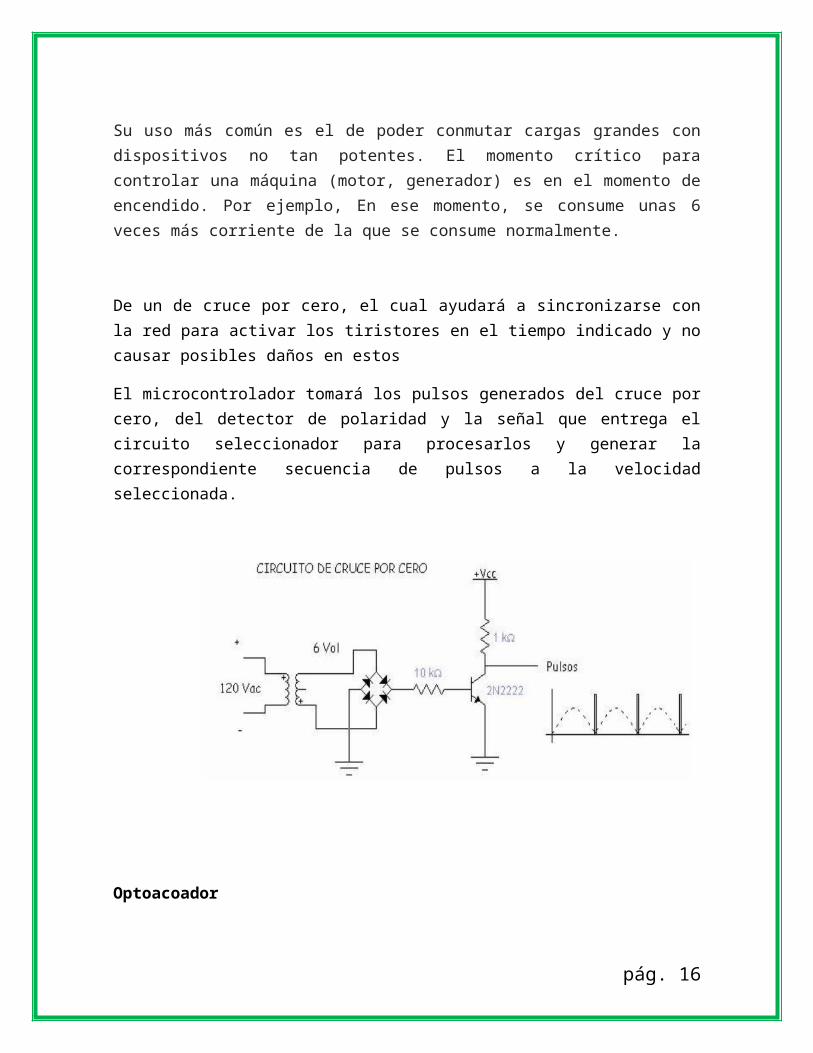
Su uso más común es el de poder conmutar cargas grandes con dispositivos no tan potentes. El momento crítico para controlar una máquina (motor, generador) es en el momento de encendido. Por ejemplo, En ese momento, se consume unas 6 veces más corriente de la que se consume normalmente.
De un de cruce por cero, el cual ayudará a sincronizarse con la red para activar los tiristores en el tiempo indicado y no causar posibles daños en estos
pág. 12
El microcontrolador tomará los pulsos generados del cruce por cero, del detector de polaridad y la señal que entrega el circuito seleccionador para procesarlos y generar la correspondiente secuencia de pulsos a la velocidad seleccionada.
Optoacoador
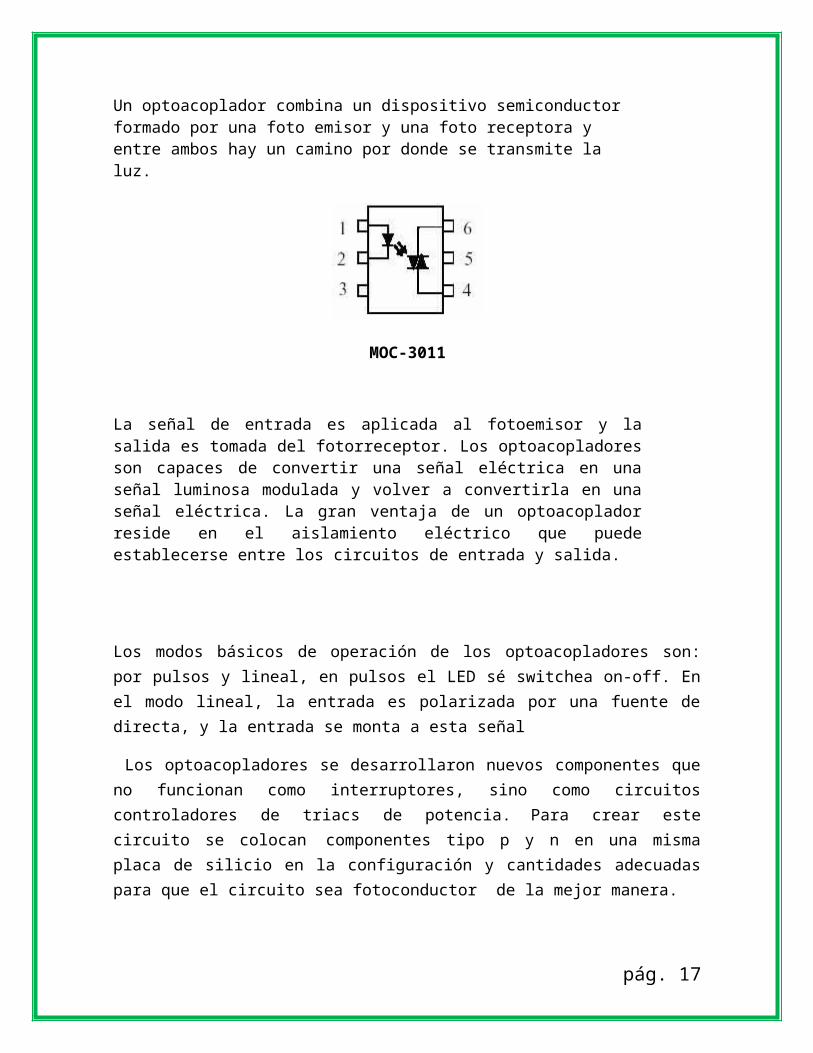
Un optoacoplador combina un dispositivo semiconductor formado por una foto emisor y una foto receptora y entre ambos hay un camino por donde se transmite la luz.
MOC-3011
La señal de entrada es aplicada al fotoemisor y la salida es tomada del fotorreceptor. Los optoacopladores son capaces de convertir una señal eléctrica en una señal luminosa modulada y volver a convertirla en una señal eléctrica. La gran ventaja de un optoacoplador reside en el aislamiento eléctrico que puede establecerse entre los circuitos de entrada y salida.
pág. 13
Los modos básicos de operación de los optoacopladores son: por pulsos y lineal, en pulsos el LED sé switchea on-off. En el modo lineal, la entrada es polarizada por una fuente de directa, y la entrada se monta a esta señal
Los optoacopladores se desarrollaron nuevos componentes que no funcionan como interruptores, sino como circuitos controladores de triacs de potencia. Para crear este circuito se colocan componentes tipo p y n en una misma placa de silicio en la configuración y cantidades adecuadas para que el circuito sea fotoconductor de la mejor manera.
Ventajas
El optoacoplador es un aislamiento físico entre el circuito de control y el de potencia
El optoacoplador permite cambios de estado a altas frecuencias a diferencia de un relé
Con un cambio de TRIAC dentro de la gama NTE563x se pueden controlar desde 50V-600V en 10A.
TRIAC
Permite el paso de la corriente cuando en su "gate" existe voltaje. Al igual que el TRIAC del optoacoplador se corta dicho paso al cumplirse las siguientes dos condiciones a la vez: el voltaje en sus terminales es aproximadamente 0V y el LED no se encuentra emitiendo luz.
DIAGRAMA GENERAL UTILIZADO
pág. 14
La figura siguiente muestra el detector de cruce por cero realizado con el software de simulación PROTEUS. El en cual su funcionamiento consta de mandar pulsos cada que la onda senoidal pasa por el punto “0”.
pág. 15
La imagen siguiente muestra la parte del opto acoplador donde el “1” del diodo del opto acoplador llegan los pulsos del microcontrolador. A la salida salen los pulsos que llegaran al “GATE” del TRIAC para dispararlo.
El TRIAC funciona como un interruptor que activara el motor.
En la figura que se presenta a continuación se muestra el circuito del variador de velocidad mediante triacs. Donde se utilizaron 3 microcontroladores 18f4550 diferentes para la activación de los pulsos hacia el optoacoplador en la línea trifásica. Como ya se sabe la línea 220VCA ya tiene desfasadas sus ondas, lo cual nos permitió valernos de este conocimiento para realizar por separado los cruces y disparos independientemente para las tres ondas senoidales de la línea trifásica.
pág. 16
CONCLUSIONES
Este tipo de control se logra en primer lugar con un cruce por cero que es el que nos indicará en que instante la corriente alterna cruzará por el valor de “cero”, claro que es más conveniente reducir el voltaje anteriormente de este paso. Una vez que se tiene cuándo es que se cruza por el cero podremos mediante programación y en la parte de potencia con un TRIAC dejar pasar un tanto de onda para así regular la velocidad, el ancho de la onda hará variar la velocidad así que sólo queda de igual modo mediante unas entradas y programación si es que queremos que vaya más rápido o más lento.
BIBLIOGRAFIA
http://platea.pntic.mec.es/~jgarrigo/SAP/archivos/1eva/introduccion_motores_ca.pdf
http://catarina.udlap.mx/u_dl_a/tales/documentos/lep/salvatori_a_m/capitulo3.pdf
http://www.instrumentacionycontrol.net/es/curso-variadores-de-velocidad/198-
metodos-de-control-de-velocidad-en-motores-ac.html
http://www.mty.itesm.mx/dcic/deptos/ie/profesores/jrodrigu/cep1/crd/
COROTDEV.HTM
http://www.kbernet.com/palaa/docu/variadores.pdf
http://www.paginadigital.com.ar/articulos/2002rest/2002terc/tecnologia/sica71.htm
http://electro.webcindario.com/control_velocidad_motor_ac.html
http://web1.taringa.net/posts/ciencia-educacion/10564432.R/motores-de-
induccion.htm
http://www.joliettech.com/what_is_a_variable_frequency_drive.htm
pág. 17








![Instructivo de Elaboracion Del Reporte Final Del Servicio Social[1]](https://img.pdfslide.us/doc/110x75/5571fb64497959916994c085/instructivo-de-elaboracion-del-reporte-final-del-servicio-social1.jpg)




















