-
Report
Reflection Seismology Processing (ProMAX)
Benjamin Zuercher, Noel Ammann
June 2, 2013
-
Contents
1 Introduction 1
2 General info about the data 1
3 Overview of the processing flow 3
4 Pre-stack processing 4
4.1 Editing . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 5
4.2 Amplitude scaling . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 5
4.2.1 True amplitude recovery . . . . . . . . . . . . . . . . .
. . . . . . . 5
4.2.2 Automatic gain control . . . . . . . . . . . . . . . . . .
. . . . . . . 6
4.3 Top mute . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 6
4.4 First break picking . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 7
4.5 Refraction statics . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 8
4.6 Frequency filtering . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 10
4.7 Deconvolution . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 11
5 Stack processing 14
5.1 CDP sort . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 14
5.2 Velocity analysis . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 14
5.3 NMO correction . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 16
5.4 Stacking . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 16
5.5 Residual statics . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 18
5.6 Iterations . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 18
6 Poststack processing 20
6.1 Noise reduction . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 20
6.2 Migration . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 20
6.3 Time to depth conversion . . . . . . . . . . . . . . . . . .
. . . . . . . . . 23
7 Interpretation 24
References 26
-
1 Introduction
In the context of the course Reflection Seismology Processing at
ETH Zurich, a seismic
dataset was given to be processed with the software ProMax 2D
Version 5000.0.3.3 from
Landmark Graphics Corporation. The used Computer runs with Linux
Red Hat.
The goal of this course was to get an insight into seismic data
processing with the given
software, learn the tools behind the processing and finally get
a realistic image of the
subsurface of an area in Northern Germany.
To do so, velocities of the different layers have to be
reconstructed as accurate as possible
by processing the raw data through different steps. Reflections
should be seen better
after the processing due to an increased signal-to-noise ratio
and an improvement of the
resolution.
2 General info about the data
All important information about the geometry could be found on
the recording sheet and
had to be added to the data as a first step. The seismic survey
line has a length of 14200m
in total and a spread length of 6100m. The recording consists of
120 channels with each
having 24 geophones coupled. A gap of 200m between channel 60
and channel 61 needed
to be added as well to the data (see figure 1)
Figure 1: Channel configuration for the data from Northern
Germany. A total spread length of 6100meters includes 120 channels.
Every 50 meters one channel is located except between channel 60
andchannel 61 where a gap of 200 meters is inserted. Every channel
consists of 24 Geophones.
The spacing between each geophone is 2m, hence one channel
spacing is 50m. A group
of geophones is always connected in the center (see figure
2).
1
-
Figure 2: Geophone configuration of one channel. 24 geophones
are coupled in the middle, each having2 meter spacing to the next
one. There was not one line with 24 geophones but two lines (0
meterhorizontal spacing) with each 12 geophones and a geophone
spacing of 4 meters.
The recording has 285 stations (101-385) in total. The recording
length is 6s and the
sampling rate is 2ms. A notch out filter with 50 Hz was
applied.
The position of the channels for all shots (the whole seismic
line) can be seen in figure
3. The geophones stayed at the same place for the first few and
the last few shots. The
boundary between yellow and red represents the place where the
source was. Because the
place of the source changed and the channels stayed at the same
place at the beginning,
one can say that the source is rolling in the seismic line. The
same can be said for the
end of the seismic line (roll out).
Figure 3: The seismic line showing the offset. Zero offset can
be seen at the color boundary betweenyellow and red.
The CDP fold is at the beginning of the seismic line very small
but the value increases
fast (roll in) and reaches then a maximum of 35. The values do
not much vary in the
middle of the seismic line, increase then once again shortly and
will then decrease a lot
to the end of the seismic line (roll out).
2
-
Figure 4: Fold vs Common Depth Point
3 Overview of the processing flow
We can split our processing into four main steps. When the
geometry is correctly set
up, first corrections for all the shots can be done. After a
deconvolution is done, it will
be stacked, analyzed and improved and finally a migration is
applied before it will be
converted from time into depth. The following points summarizes
all the processing flows
we used:
Pre-stack processing
Editing (Kill traces)
Amplitude scaling (Correct for attenuation)
Top mute (Get rid of insignificant waves)
First break picking (Gets the information for a good velocity
model)
Refraction statics (Correct for weathered layer and
topography)
Frequency filtering (Get rid of ambient noise)
Deconvolution (Improve resolution)
Stack processing
CDP sort (Reflections are sorted into a CDP gather)
3
-
Velocity analysis (Picking velocities at recognisable
layers)
NMO correction (Correct reflection arrival times)
Stacking (Summarizing into a single output)
Residual statistics (Velocity corrections in the shallower
part)
Iterations (Iteration of the whole stack processing flow to
improve the stack)
Post-stack processing
Noise Reduction / Image enhancement (Using a filter to reduce
noise)
Migration (Convert the reflections into a more realistic
geological image)
Time to depth conversion (Convert the time-axis to a
depth-axis)
Interpretation
4 Pre-stack processing
Before we start with processing, an example shot gather is shown
in figure 5.
Figure 5: Example shot number 45 before processing. The shot
contains a lot of noise and bad coupledtraces, hence the resolution
is quite bad.
4
-
4.1 Editing
Bad traces were killed. They were good recognizable, because of
their high noises before
the first breaks. If we not have them removed, the results from
the first break picking
would have been random and incorrect at these traces. The high
noise is probably the
cause from bad coupled geophones or an ambient noise close to
this geophone.
4.2 Amplitude scaling
4.2.1 True amplitude recovery
We need to apply an amplitude recovery due to attenuation and
wavefront spreading
effects [Yilmaz, 2001]. We use a mathematical function for this
true amplitude recovery:
A(t) = A0(t) tn, where A(t) is the output, A0(t) is the initial
amplitude, t is the traveltime and n is the exponential term which
we will vary until we have a suitable result. We
tested values for n between 1.5 and 2.2 and found the best value
to be 1.6. This value
was chosen, because the reflections are now much better
recognizable and if the n value is
too high, the noise will be increased in the deeper parts and
the upper reflections are less
clearer recognizable and we dont want that. The maximum
application time was chosen
to be 2800ms, because no more reflections can be seen beneath
this value.
Figure 6: Shot number 45 after applying true amplitude recovery.
The inserted exponential term has thevalue 1.6. Reflections are
much more visible after this processing step.
5
-
4.2.2 Automatic gain control
Automatic Gain control is a similar operator like the one
described before, because is tries
to compensate the attenuation of a waves which are propagating
trough a medium. But
it only will be applied in a certain time gate. This time is
defined by an operator length
and is now to be found. The operator length was tested between
500ms and 1700ms and
the optimal value for our data is 1500ms. A higher value will
strengthen the reflections
and decrease the noise. Too high values will cause that deeper
reflections vanish again in
the noise.
Figure 7: Shot number 45 after applying automatic gain control.
An operator length of 1500ms was usedand so this flow caused that
the reflections are now more highlighted than before.
4.3 Top mute
Basically, we are only interested in the reflection waves and
therefore first arrival waves
with high amplitudes can be removed from the screen with a top
mute. The information
will not be deleted, it just does not appear anymore on the
screen when applying the top
mute [ProMAX, 1999]. An example of a top mute is shown in figure
8.
6
-
Figure 8: Shot number 45 with a top mute. The green line is the
boundary where all data above wasremoved.
4.4 First break picking
First breaks give us helpful information to get a good velocity
model of the subsurface.
Therefore it is important that these first breaks are picked
correctly. The inverse of the
different slopes will give us the velocities. [Yilmaz, 2001]
Figure 9: The inverse of the slopes from the first arrivals
defines the velocities of the subsurface. V1 isthe velocity from
the first layer, v2 is the velocity from the second layer.
First, a time gate needed to be defined to say in which zone the
first breaks are. A line
was drawn along all channels approximately 50ms above and 100ms
below the actual first
break. Then we had to pick the first breaks for several shot
gathers manually until the
dataset was trained enough to apply the neural network to all
shot gathers automatically.
Each shot gather had then to be controlled and adjusted (figure
10).
7
-
Figure 10: The red line shows the first breaks for one shot
gather. First they were picked manuallyfor several shot gathers and
after they were trained enough, this was done automatically using
neuralnetwork.
4.5 Refraction statics
We need to do some refraction statics because the weathered
surface layer may have
velocity variations and together with the topography, it may
cause some false delay times
and therefore it will give troubles during further processing
steps. Hence it should be
corrected that it will not be interpreted wrong [Yilmaz, 2001,
ProMAX, 1999]. To do all
this we needed to change the server to one which provides a
8-bit Pseudo-color diplay.
As a first step, it had to be defined which first breaks belong
to which layer. Therefore a
velocity had to be chosen (see figure 11) but this velocity is
just a help for further steps.
Only the end points of the drag lines were used as layer
boundaries [ProMAX, 1999].
Then we corrected the velocities in the refractor velocity mode
to prevent velocities to be
completely wrong at some stations. It was important that the
value of the velocity v1
was always higher than the v0 velocity, otherwise it had to be
corrected (see figure 12).
As a next step, the receiver delay times were displayed for the
whole line. There are three
different static solution methods and they behave differently,
as it can be seen in figure 13.
The GRM method had some more errors than the DRM and the STD
methods. Thats
why the diminishing residual matrices (DRM) method was chosen to
be the most useful
one.
8
-
After the refractor depth model was displayed and checked, the
output statics was added
to the database.
Figure 11: Defining a velocity as a help for further steps and
layer boundaries in the refraction statics.The black line was drawn
and a resulting velocity of 1657 m/s was found.
Figure 12: Refractor velocity was corrected in a way, that no
more crossing between the two velocitiesv0 and v1 existed.
9
-
Figure 13: Three different statics solutions are shown. DRM, GRM
and STD
4.6 Frequency filtering
We used an Ormsby bandpass filter to get rid of ambient noise.
Our data contains still
disturbing noise (e.g. ground roll), hence the typical range of
frequencies where noise
appears, is not useful for us and can be removed. Our filter
looked as follow: 18-27-80-
110. After applying it (figure 14), the shot gathers looked much
better than before. High
noisy amplitudes were removed, hence reflections are much
clearer to see now.
Figure 14: Shot number 45 after applying an Ormsby bandpass
filter (18-27-80-110). High amplitude inthe middle are removed and
therefore reflections ar much better to identify.
10
-
4.7 Deconvolution
We applied deconvolution to improve the resolution and get rid
of multiples. This is
realized by compress the wavelet and trying to get the whole
energy at the beginning of a
reflection. We do that by estimating all effects from the earth,
put these information into
a linear filter and then design and apply inverse filters.
[Yilmaz, 2001, ProMAX, 1999]
There are three different kinds of deconvolution we used:
Spiking deconvolution: The wavelet has to be minimum phase
(energy is at thebeginning of the wavelet) and a zero-lag spike
(turning the source into a specific
frequency content) is used as an output. The used filter is
called Wiener-Levinson.
[Yilmaz, 2001, ProMAX, 1999]
Predictive deconvolution: It implies that the wavelet has
minimum phase. Thedesired output is a time-advanced form of the
input series. When x(t) is an input,
x(t + a) will be the output, where a is the prediction lag. The
used filter type is
the same as for the spiking deconvolution. Actually, if the
prediction lag is equals
zero, the predictive deconvolution is nothing else than the
spiking deconvolution.
[Yilmaz, 2001, ProMAX, 1999]
Time variant spectral whitening: The TVSW algorithm operates in
the frequencydomain and these frequencies are balanced with the
purpose to obtain a better
resolution. As the name says, the whitening can vary in time. In
theory it works
like that the dataset is transformed into the frequency domain,
multiplied by the
filter spectrum (bandpass) and then transformed back to time. An
automatic gain
control scalar is applied to all the traces and then both are
added together. [Yilmaz,
2001, ProMAX, 1999]
As a first step, the autocorrelation was analyzed to define the
best values for the decon
operator length (how much of the autocorrelation is used) for
the spiking and predictive
deconvolution and the prediction lag for the predictive
deconvolution. Several parameter
were tested and the decon operator length was then chosen to be
128ms, because the
higher amplitudes needed to be in the upper part and this was
achieved best at this value.
The prediction lag was chosen where the first zero crossing was
for all channels more or
less the same and this was found at 12ms (see figure 15). The
sprectral balancing scalar
length for the TVSW method was set to 11ms and the sprectral
balancing frequencies are
15,22,125,170.
Figure 16 shows the frequencies before and after the three
deconvolutions and it explains
quite good, that the deconvolution tries to flatten the
frequency spectrum.
11
-
Figure 15: Autocorrelation for the predictive deconvolution
using a prediction lag of 12ms and an operatorlength of 128ms.
Figure 16: Frequency spectrum (top left) before deconvolution
(top right) after spiking deconvolution(bottom left) after
predictive deconvolution (bottom right) after TVSW
We had to choose from one of the above describes methods and
therefore a compar-
ison is done. Figure 17 shows the spiking and the predictive
deconvolution, Figure 18
the TVSW method and the shot before deconvolution. It is clearly
seen that the predic-
tive deconvolution generated the strongest reflection amplitudes
and the most flattened
frequency spectrum, if it is compared to the other methods. The
reflections in the spik-
ing deconvolution and the TVSW method can be seen as well, but
the endings of the
lines disappear in the noise, hence it is more difficult to see
the reflections. Therefore we
decided to use the predictive deconvolution for our further
processing.
12
-
Figure 17: top: spiking deconvolution (operator length 128ms),
bottom: predictive deconvolution (peratorlength 128ms, prediction
lag 12 ms)
Figure 18: top: TVSW method, bottom: before deconvolution
13
-
5 Stack processing
Stacking is used to improve the overall quality of the data and
is basically nothing else
than adding together traces from a processed seismic record to
increase the S/N ratio.
[Yilmaz, 2001]
Here we produced a first stack of the subsurface through CDP
(common midpoint) sorting,
velocity analysis using the volume viewer and NMO (normal
moveout) correction. To
improve the quality of the stack, residual statics were applied
and the velocity model of
the subsurface was updated. We repeated these steps twice to get
two different stacks
which we then could compare.
5.1 CDP sort
Before stacking, the seismic data is organized into a CDP
gather, the 2D Supergather.
This Supergather combines many CDPs. The result from a CDP sort
is that the reflections
carry the information on the same common midpoint below the
subsurface. [ProMAX,
1999]
5.2 Velocity analysis
Velocity analysis is an interactive tool which uses the above
described CDP sort and it is
used to determine the stacking velocities. The picked velocities
should then improve the
subsurface model. [ProMAX, 1999]
The screen is divided into panels (see figure 19), hence the
velocity can be picked by several
criteria. We picked clear reflections which were correlated to
high semblance values (red
colored areas on the left side of the screen) and were in a good
agreement with the gather
panel and the dynamic stack. A velocity was taken for the
shallower part of the subsurface
which we had determined in the refraction statics (1700
m/s).
A velocity model (figure 20) was computed after picking the
stacking velocity.
14
-
Figure 19: Interactive display of the stacking velocity
analysis. From left to right: Semblance panel,gather panel, dynamic
stack, velocity function stack panels
Figure 20: Velocity model computed by the stacking
velocities.
15
-
5.3 NMO correction
When collecting seismic data with a recording instrument, a
reflection typically arrives
first at the nearest receiver station from the source. But an
increasing offset between
source and receiver results in a delay in the arrival time of
the reflection (hyperbolic
shape in a seismogram). The NMO correction is used in the
processing to remove this
offset dependency [Yilmaz, 2001, ProMAX, 1999]. An example of
such a correction is
shown in figure 21.
Figure 21: Normal move out correction
5.4 Stacking
After a CDP sorting, a velocity analysis and a NMO correction,
the whole seismic data
is summarized into a single output trace called stack 1 (figure
22). This is the first image
of our subsurface and especially the left part of the image
shows quite good reflection
horizons. However the image can still be improved a lot because
some areas are still fuzzy
and cant be clearly identified.
16
-
Figure 22: Stack 1
17
-
5.5 Residual statics
The velocities in the shallow part of the subsurface contain
irregularities. As mentioned
above, reflections have a hyperbolic shape. Residual statics
corrects shifts in the velocity
irregularities that led to non-hyperbolic shapes of the
reflections and brings the travel
times to align better [Yilmaz, 2001, ProMAX, 1999]. Both methods
of Maximum Power
Autostatics and Correlation Autostatics were tested on the
non-stacked input data and
Correlation Autostatics was the best suitable method. This
method measures time shifts
and tries to partition it into source and receiver statics
[ProMAX, 1999].
5.6 Iterations
All the steps described above were repeated to improve stack 1.
Figure 23 shows the
velocity model after picking the velocities the second time in
the velocity analysis. Stack
1 and the position of the picked velocities is seen in the
background.
From the new velocity model we got stack 2 as a result. It is
shown in figure 24 and
an overall improvement can be seen. The structure in the middle
got a clearly visible
top, which wasnt the case before. The reflections are sharper,
especially on the right.
Discontinuities of incoherent horizons got corrected and the
dipping events are more
visible.
Figure 23: Velocity model after residual statics 1 and velocity
analysis 2. Stack 1 is displayed in thebackground and the location
of the picked velocities is represented by the blue circles
18
-
Figure 24: Stack 2
19
-
6 Poststack processing
6.1 Noise reduction
The stacked section still contains noise which obscures
information. So it has to be
reduced as much as possible without losing the seismic signals.
That is why the data will
be transformed into a domain, where noise and signal can be
separated. Two types of noise
reduction (F-X deconvolution and eigenvector filter) were
tested. The F-X deconvolution
with 9 filter samples and a horizontal window length of 90 ms
improved the coherency of
the reflections best, hence it was applied to the stack.
6.2 Migration
One of the last step in reflection processing is migration. It
converts the seismic image to
a more realistic geological subsurface image, it improves
spatial resolution. For example
dipping reflector move to their true subsurface position and
diffractions collapse [Yilmaz,
2001]. There are several types of migration, three of them were
used:
Kirchhoff migration: It is a technique that uses the integral
form of the wave equa-tion. Its implementation represents stacking
of the data along curves that trace the
arrival time of energy scattered by image points in the Earth.
It needs a (smoothed)
root-mean-square input velocity in order to solve the integral
form of the wave equa-
tion (Kirchhoff equation). As to say, it uses the diffraction
summation technique
that sums seismic amplitudes along diffraction hyperbola and
stores the energy in
its apex. [Schlumberger, 2013]
FD migration: Downward continuation is a method that helps
estimating the valuesof seismic data in the studied subsurface,
with the assumption of continuity of
the field. FD Migration implements just this principle of
downward continuation
by solving the differential wave equation (in opposite to the
Kirchhoff migration).
There are two different ways (fast or steep) to do this
migration. Fast FD migration
needs only little computational time but can only handle flat
dips, therefore steep
FD migration is used because it can also handle steep dips.
[Yilmaz, 2001, ProMAX,
1999]
FK migration (phase-shift): The FK migration (downward
continuation in the f-kdomain) has the characteristics that it is
very accurate for constant velocities but
fails to image steep dips where large velocity variations occur.
Due to the fact that
a single velocity function is needed as data input, this
migration method works very
fast compared to others. [Yilmaz, 2001, ProMAX, 1999]
20
-
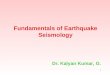
Figure 25-27 are showing the three tested migrations. Finally,
we decided to apply the
steep FD migration to the stack because it contained smother
structures and less artefacts
than the others.
Figure 25: Stack 2 applied with the steep FD migration
21
-
Figure 26: Stack 2 applied with the Kirchhoff migration
Figure 27: Stack 2 applied with the FK migration (phase
shift)
22
-
6.3 Time to depth conversion
Figure 28: Migrated stack converted into depth
23
-
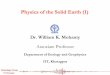
7 Interpretation
The time to depth conversion was the last step in our
processing, hence we can see
now structures of the subsurface from Northern Germany. These
structures can now be
interpreted as geological layers and fractures and of course the
geological history can be
guessed.
Figure 29 shows the migrated stack with some interpretation in
it. The green line shows
a layer boundary at 1100m depth. The layer is broken in the
middle (red line shows a
fracture zone), a horst was built due to a thrust fault. The
next clear layer boundary is
drawn yellow at 1800 m and it shows a anticlinal structure in
the middle. The purple
lines are dipping layers and beneath them, the structures are
not so clear any more, hence
it was summarized as one shape (blue).
Salt layers were created (probably in a chemical process in a
drying out aquatic area) and
afterwards, it was covered by clastic sediments. Due to
buoyancy, caused by variation in
density, the salt layer built a dome in the middle and this had
an effect on the purple
layers. They were pulled down at some points. After that, we had
some erosion and new
sediments were deposited. The salt dome had then once again a
buoyancy which caused
the anticlinal structure (yellow) and the fracture in the green
layer. Finally, it was filled
up with sediments again.
24
-
Figure 29: Interpretation of the migrated stack.
25
-
References
ProMAX. Promax manual. Process help files, 1999.
Schlumberger. glossary. http://www.glossary.oilfield.slb.com/,
2013.
Ozdogan Yilmaz. Seismic data analysis: processing, inversion,
and interpretation of
seismic data. Number 10. SEG Books, 2001.
26