Embed Size (px)
Citation preview

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 1
PREFACE
1.1 INTRODUCTION
A robot is defined as a ‘re-programmable multi-functional manipulator’. In simple words, it is a
mechanical system which consists of sensing and executing organs; controlled by an electronic
‘brain’ that can perform a number of operations independently within a confined space. The robot
movements are controlled by a user and future movements can be stored in micro-controller, and thus
its job assignments can be changed by reprogramming micro-controller.
The Metal and Chemical Detecting Robot movements are controlled by user using Radio frequency
signals like moving right, left, back, and front. Once if the robot detects any metallic material in front
of it, then it starts generating sound signals or triggers buzzer unit and indicates metallic or chemical
bomb is detected.
The ‘RF Based Metal Detecting Robot’ project has two parts: Transmitter and Receiver. The
Transmitter part consists of RF (Radio Frequency) or IR (Infrared Rays), Interface Module and RC5
Transmitter. The commands are sent by the user and the intended software. These commands are in
RC5 [Recommended Code] form, and are transmitted to the Robotic Vehicle through Infra-Red
Packets.
The Receiver part receives the RC5 coded signals and fed to PIC micro-controller chip. This Micro-
controller decodes RC5 codes back to original commands and executes them as needed. Here the
decoded signals are properly routed using switching circuit. The output of the switching circuit
controls the movement of the Robotic Vehicle. If the command says to turn Right/ Left or move
Forward/Reverse it does so by activating the respective motor, and thus fulfilling the need. The
Receiver part thus has two motors: to and fro movement and Left/Right turn and
object/obstacle detection along with image capturing using Wireless CAM.
1.2 MOTIVATION
The law enforcement community needs a low-cost robot that can reduce or eliminate the danger for a
bomb technician who must inspect, x-ray, and disrupt an explosive device preferably in its original
“SVCP- Electronics & Telecommunication Engineering”1

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
place or may be sometimes need to be relocated. Sensors and tools must be placed close to a
suspected device. Approaching a device can be dangerous, since many points along the path to the
bomb may be booby-trapped. Even when a bomb technician uses great care in inspecting or handling
an explosive device, the possibility exists that the bomber is waiting nearby to remotely detonate the
device or a secondary device when the bomb technician is within range. An effective Bomb Disposal
Unit (BDU) can reduce or eliminate the risk of potentially deadly scenarios and allow a bomb
technician to focus on disabling the device. The same feature can be extended to be used in the war
fields where the army might be required to go into the hostile situations where mines could have been
laid. In such situations in case the human beings are allowed to go traverse over them there will be a major loss
in the human resource. Thus a need arises to diffuse or locate a mine from a distance. Even if a BDU cannot
diffuse a device, it can still relay information to aid in selecting tools and procedures before a technician
approaches a device. In addition, events recorded by a robot’s camera can provide evidence for future forensic
purposes.
1.3 CONTRIBUTIONS OF THIS REPORT
The use of cutting edge Wi-Fi technology allowing better, faster & undisputed signal allowing better
communication and control. It’s highly efficient for military & security purposes in bomb related
fields. It has greater area of effect & range ability. It detects metal bombs & chemical bombs. Camera
allows robot to access areas which are humanly hard to scale, in time of emergencies.
1.4 ORGANIZATION OF THIS REPORT
Chapter1 gives the basic introduction & the motivation behind the project.Chapter2 consists of
literature survey of the projects & some similar exemplary projects in the same field. Chapter3 deals
with the detection methods, as well as the detailed description of the transmitter & receiver module.
Chapter4 gives a detailed description of the power supply unit & other important components used in
the robot. Chapter5 explains the basic design & operation of the whole circutary.Finally,chapter6 is
the conclusion we derived from this project.
“SVCP- Electronics & Telecommunication Engineering”2

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 2
LITERATURE SURVEY
2.1 INTRODUCTION
Tele-robotics is the area of robotics concerned with the control of robots from a distance, chiefly
using wireless connections (like Wi-Fi, Bluetooth, the Deep Space Network, and similar), "tethered"
connections, or the Internet. It is a combination of two major subfields, tele-operation and tele-
presence. Even though this is the first of its kind prototype bot, similar bots applicable in this field
have been made.
The First Remote Control Vehicle / Precision Guided Weapon, this propeller-driven radio controlled
boat, built by Nikola Tesla in 1898, is the original prototype of all modern-day uninhabited aerial
vehicles and precision guided weapons. In fact, all remotely operated vehicles in air, land or sea.
Powered by lead-acid batteries and an electric drive motor, the vessel was designed to be maneuvered
alongside a target using instructions received from a wireless remote control transmitter. Once in
position, a command would be sent to detonate an explosive charge contained within the boats
forward compartment. The weapon's guidance system incorporated a secure communications link
between the pilot's controller and the surface-running torpedo in an effort to assure that control could
be maintained even in the presence of electronic countermeasures. To learn more about Tesla's
system for secure wireless communications and his pioneering Implementation of the electronic
logic-gate circuit read ‘Nikola Tesla — Guided Weapons & Computer Technology’, Tesla Presents
Series Part 3, with commentary by Leland Anderson.
Use of Remote Controlled Vehicles During World War II :During World War II in the European
Theater the U.S. Air Force experimented with three basic forms radio control guided weapons. In
each case, the weapon would be directed to its target by a crew member on a control plane. The first
weapon was essentially a standard bomb fitted with steering controls. The next evolution involved the
fitting of a bomb to a glider airframe, one version, the GB-4 having a TV camera to assist the
controller with targeting. The third class of guided weapon was the remote controlled B-17. It's
known that Germany deployed a number of more advanced guided strike weapons that saw combat
before either the V-1 or V-2. They were the radio-controlled Henschel's Hs 293A and Ruhrstahl's
SD1400X, known as "Fritz X," both air-launched, primarily against ships at sea.
“SVCP- Electronics & Telecommunication Engineering”3

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
2.2 EXAMPLES:
Some of the present day bots are as follows:
1) The Spiral Track Autonomous Robot (STAR): A team of engineers developed STAR at the
Lawrence Livermore National Laboratory in California. Speed: 133 feet per minute when moving
sideways, 20 feet per minute when moving forward or backwards. STAR can be controlled remotely
or can control itself autonomously. During remote operation, an operator controls the robot using a
wireless data link attached to a laptop computer. The operator can view the surrounding environment
via a wireless video. In the autonomous mode, STAR is given start and end points and can then plan
its own path independently.
Other features:
STAR can be equipped with video cameras, microphones and infrared sensors.
It can also employ radiation and gas sensors.
The robot can also be equipped with Micropower Impulse Radar (MIR) land mine detection
technology (which was also developed at the Lawrence Livermore National Laboratory).
2) RF Controlled Robot with Metal Detector and Wireless image and voice transmission (Model
Path Finder): Developed by Trevelyan, J. Dept. of Mech. & Mater. Eng., Western Australia Univ.,
Nedlands, WA;
“SVCP- Electronics & Telecommunication Engineering”4

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 3
DETECTION METHODS
3.1 RADIO FREQUENCY CIRCUIT TECHNIQUES
Radio must surely be one of the most fascinating aspects of electronics. This part of explanation
provides a brief introduction to radio communication before describing the circuitry of RF receivers
and transmitters. The aim has been to provide the user with sufficient information to what his or her
appetite for a subject which has a broad appeal to a large number of dedicated enthusiasts all over the
world.
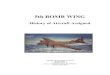
Figure 3.1 The
Radio Frequency Spectrum
“SVCP- Electronics & Telecommunication Engineering”5
FM broadcasting
TV bands 1V/V
3
MHz
100 m
Very high frequency, VHF
SW broadcasting
MW broadcasting
Medium frequency, MF
300 KHz
1 KmLW broadcastingLow frequency, LF
10 Km
30 KH
z
3 GHz
10 cm
Frequency
Wavelength
30 MHz
10 m
30 MHz
1 m
Ultra high frequency,
UHF
High frequency,
HF

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Radio Frequency Circuit Techniques
Radio must surely be one of the most fascinating aspects of electronics. This part of explanation
provides a brief introduction to radio communication before describing the circuitry of RF receivers
and transmitters. The aim has been to provide the user with sufficient information to what his or her
appetite for a subject which has a broad appeal to a large number of dedicated enthusiasts all over the
world.
3.2 Radio Frequency Signals:
Radio frequency signals are generally understood to occupy a frequency range, which extends from a
few tens of kilohertz to several hundred giga-hertz. The lowest part of radio frequency range, which
is of practical use (below 30 kHz), is only suitable for narrow-band communications. At this
frequency, signals propagate as ground waves (following the curvature of the earth) over very long
distance. At the other extreme, the highest frequency range, which is of practical importance, extends
above 30GHz. At these ‘microwave’ frequencies, considerable bandwidths are available (sufficient to
transmit many television channel using point-to-point links or to permit very high definition radar
systems) and signals tend to propagate strictly along ‘line-of-sight’ paths.
At other frequencies, signals may propagate by various means, including reflection from ionized
layers in the ionosphere. At frequencies between 3MHz and 30MHz, for example, ionospheric
propagation regularly permits intercontinental broadcasting and communications using simple
equipment within the scope of the enthusiastic radio amateur and short-wave listener.
For convenience, the radio frequency spectrum is divided into a number of bands, each spanning a
decade of frequency. The use to which each frequency range is put depends upon a number of factors,
paramount amongst which is the propagation characteristic within the band concerned. Other factors,
which need to be taken into account, include the efficiency of practical aerial system in the range
concerned and the bandwidth available. It is also worth noting that, although it may appear from
Figure A that a great deal of the radio frequency spectrum is not used, it should be stressed that
competition for frequency space is fierce. Frequency allocations are, therefore, ratified by
international agreement and the various user services carefully safeguard their own areas of the
spectrum.
“SVCP- Electronics & Telecommunication Engineering”6

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
3.3 Frequency and wavelength:
Radio waves propagate in air (or space) at the speed of light (300 million meters per second). The
velocity of propagation[v], wavelength [] and frequency [f] of a radio wave are related by the
equation:
V = f = 3 X 108 m/s
This equation can be arranged to make f or the subject, as follows:
F = 3 X 108/ Hz and = 3 X 108 / fm
As an example, a signal at a frequency of 1 MHz will have a wavelength of 300 m whereas a signal at
a frequency of 10 MHz will have a wavelength of 30m.
3.4 Modulation
In order to convey information using a radio frequency carrier, the signal information must be
superimposed or ‘modulated’ onto the carrier. Modulation is the name given to the process of
changing a particular property of the carrier wave in sympathy with the instantaneous voltage (or
current) signal.
The most commonly used methods of modulation are amplitude modulation (AM) and frequency
modulation (FM). In the former case, the carrier amplitude (its peak voltage) varies according to the
voltage, at any instant, of the modulating signal. In the latter case, the carrier frequency is varied in
accordance with the voltage, at any instant, of the modulating signal.
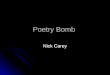
Figure B shows the effect of amplitude and frequency modulating a sinusoidal carrier (note that the
modulating signal is, in the case, also sinusoidal). In practice, many more cycles of the radio
frequency carrier would occur in the time span of the cycle of the modulating signal.
“SVCP- Electronics & Telecommunication Engineering”7

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Figure 3.2 Amplitude & Frequency Modulation
The term ‘angle modulation’ is the generic term encompassing both frequency modulation and phase
modulation. Frequency modulation involves operating directly upon the frequency determining
elements of an oscillator stage (e.g. by means of a variable capacitance diode placed across the
oscillator-tuned circuit or connected in series with a quartz crystal).
Phase modulation, on the other hand, acts indirectly by changing the phase of the signal in a
subsequent stage (e.g. by means of a variable capacitance diode acting in a phase shifting circuit).
If the modulating signal (audio) is correctly tailored prior to its application to the phase modulated
stage, the end result is identical to that of frequency modulation. The reason for this is that, in a true
FM system, the deviation produced is the same for all modulating signals of equal amplitude (i.e. the
amount frequency deviation is independent of the frequency of the modulating signal). In a phase-
modulated system, on other hand, the amount of frequency deviation is proportional to both
modulating signal amplitude and modulating signal frequency. Thus in a phase modulated system
without audio tailoring, a modulation signal of 2 kHz will produce twice as much frequency deviation
as an equal amplitude modulating signal of 1 kHz. The desired audio response required to produce
“SVCP- Electronics & Telecommunication Engineering”8

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
FM, therefore, is one, which rolls off the frequency response by half for each doubling of frequency
(equivalent to 6-dB per octave roll-off). This can be easily achieved using a simple R-C low-pass
filter.
3.5 Demodulation
Demodulation is the reverse of modulation and is the means by which the signal information is
recovered from the modulated carrier. Demodulation is achieved by means of a demodulator consists
of a reconstructed version of the original signal information present at the input of the modulator
stage within the transmitter.
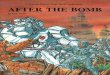
Figure C shows the simplified block schematic of a simple radio communication system comprising
on AM transmitter and a ‘tuned radio frequency’ (TRF) receiver. Within the transmitter, the carrier
wave (of constant frequency) is generated by means of a radio frequency oscillator stage. In order to
ensure that the carrier is both accurate and within in frequency, this stage would normally employ a
quartz crystal within its frequency generating circuitry.
The output of the modulator (a modulated carrier) is amplified before outputting to the aerial system.
The output is usually carefully filtered to remove any spurious signals (harmonics) which may be
present and which may otherwise cause interference to other services.
At the receiver, the signal produced by the receiving aerial is a weak copy of the transmitted signal
(its level is usually measured in a V). Also present will be countless other signals at different
frequencies (and some with appreciably larger amplitude than the desired signal). These unwanted
“SVCP- Electronics & Telecommunication Engineering”9
AF
amplifier
RF
Osc.
Modulator
RF
amplifier
Mic.
Demodulator
RF
amplifier
AF
amplifier
S
Figure.3.3-Radio Communication System

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
signals must be rejected by the receiver’s radio frequency tuned circuits if they are no to cause
problems in later stages.
3.6 TRANSMITTER MODULE
A) RF TRANSMITTER
The RF transmitter is built around the ASIC and common passive and active components, which are
very easy to obtain from the material shelf. The circuit works on Very High Frequency band with
wide covering range. The Carrier frequency is 147 MHz and Data frequencies are 17 MHz, 19 MHz,
22 MHz & 25 MHz. It should be noted that ASIC or Application Specific Integrated Circuit is
proprietary product and data sheet or pin details or working principles are not readily available to the
user.
ASIC: Application Specific Integrated Circuit [ASIC] is another option for embedded hardware
developers. ASIC needs to be custom-built for specific applications, so it is costly. If the embedded
system being designed is a consumer item and is likely to be sold in large quantities, then going the
ASIC route is the best option, as it considerably reduces the cost of each unit. In addition, size and
power consumption will also be reduced. As the chip count (the number of chips on the system)
decreases, reliability increases.
If the embedded system is for the mass market, such as those used in CD players, toys, and mobile
devices, cost is a major consideration. Choosing the right processor, memory devices, and peripherals
to meet the functionality and performance requirements while keeping the cost reasonable is of
critical importance. In such cases, the designers will develop an Application Specific Integrated
Circuit or an Application Specific Microprocessor to reduce the hardware components and hence the
cost. Typically, a developer first creates a prototype by writing the software for a general-purpose
processor, and subsequently develops an ASIC to reduce the cost.
Oscillator: An electronic device that generates sinusoidal oscillations of desired frequency is known
as a sinusoidal oscillator. Although we speak of an oscillator as “generating” a frequency, it should be
noted that it does not create energy, but merely acts as an energy converter. It receives D.C. energy
and changes it into A.C energy of desired frequency. The frequency of oscillations depends upon the
constants of the device.
A circuit which produces electrical oscillations of any desired frequency is known as an oscillatory
circuit or tank circuit. A simple oscillatory circuit consists of a capacitor (C) and inductance coil (L)
“SVCP- Electronics & Telecommunication Engineering”10

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
in parallel. This electrical system can produce electrical oscillations of frequency determined by the
values of L and C. The sequence of charge and discharge results in alternating motion of electrons or
an oscillating current. The energy is alternately stored in the electric field of the capacitor and the
magnetic field of the inductance coil. This intercharge of energy between L and C is repeated over
and again resulting in the production of oscillations.
In order to obtain continuous undamped a.c. output from the tank circuit, it is necessary to supply the
correct amount of power to the circuit. The most practical way to do this is to supply D.C. power to
some device which should convert it to necessary a.c. power for supply to the tank circuit. This can
be achieved by employing a transistor circuit. Because of its ability to amplify, a transistor is very
efficient energy converter i.e. it converts D.C. power to A.C. power. If the damped oscillations in the
tank circuit are applied to the base of transistor, it will result in an amplified reproduction of
oscillations in the collector circuit. Because of this amplification more energy is available in the
collector circuit than in the base circuit. If a part of this collector-circuit energy is feedback by some
means to the base circuit in proper phase to aid the oscillations in the tank circuit, then its losses will
be overcome and continuous undamped oscillations will occur.
Hartley Oscillator is very popular and is commonly used as a local oscillator in radio receivers. It has
two main advantages viz., adaptability to a wide range of frequencies and is easy to tune.
The RF transmitter is built around the common passive and active components, which are very is to
obtain from the material shelf. The circuit works on Very High Frequency band with wide covering
range.
B) CIRCUIT DESCRIPTION:
The ASIC Transmitter IC has four inputs and only one output pin. The four inputs are for the
frequency range of 17 KHz, 19 KHz, 22 KHz and 25 KHz and four switches are provided for each
range. When any one switch is selected, that frequency is added to the Transmitter circuit as data
frequency and transmitted in the air. The Crystal X1 with two coupling capacitor provides the
working oscillator frequency to the circuit. The Capacitors C6 and C7 are to stabilize the crystal
oscillator frequency.
“SVCP- Electronics & Telecommunication Engineering”11

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
C) Parts List
SEMICONDUCTORS:
IC ASIC 1
T1 BC 547 NPN Transistor 1
T2 BF 494 NPN Transistor 1
RESISTORS:
R1 & R2 2.7 K Ohm ¼ Watt 2
R3 & R6 330 K Ohm ¼ Watt 2
R4 1 K Ohm ¼ Watt 1
R5 47 K Ohm ¼ Watt 1
CAPACITORS:
C1, C2 0.001 Pico Farad Capacitor 2
C3 & C7 0.022 Pico Farad Capacitor 2
C4 4.7 Pico Farad Capacitor 1
C5 & C6 0.01 Micro Farad Capacitor 2
MISCELLANEOUS:
X1 1.44 MHz Crystal 1
S1 to S4 ON/OFF SWITCHES 4
L1 RF Coil 200mH 1
L2 Aerial or Telescopic Antenna 1
“SVCP- Electronics & Telecommunication Engineering”12

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
The ASIC output is added to the transmitter circuit’s oscillator transistor T1s base. The data
frequency is added with carrier frequency 147 MHz and aired for transmitting purpose. The transistor
T1 is heart of the Hartely Oscillator and oscillates at carrier frequency of 147 MHz along with tuned
circuit formed by coil L1 and capacitor C4. The Data frequency is fed to T1 on base through resistors
R4 and R5. Capacitors C1 and C3 and for stabilizing the tuned circuit along with resistor R3.
To increase the range of the circuit, transmitting signals must be strong enough to travel the long
distance [i.e., upto 100 meters in this prototype]. So the generated signals are made strong by
amplifying to certain level with the help of Transistor T2 and associated circuit.
The Radio frequency thus generated is fed to pre-amplifier transistor T2 on base terminal. The
resistor R6 provides the bias voltage to T2 and capacitors C5 & C7 removes the noise and harmonics
present in the circuit. The antenna coil L2 transmits the radio frequency in the air.
“SVCP- Electronics & Telecommunication Engineering”13

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
“SVCP- Electronics & Telecommunication Engineering”14
R6
R4 C1 R5
C5
R3 330K
R2 2K7
C7
C2 0.001
T1
C3 C4
L1
L2
T2
R1
+Vcc
Gnd
17 KHz S1
19KHz S2
22 KHz S3
25 KHz S4
ASIC
C6
C7
X1
FIGURE.3.4-CIRCUIT DIAGRAM OF WI-FI
TRANSMITTER

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
3.7 RECEIVER MODULE
A) RF RECEIVER
This circuit is built around the ASIC i.e., Application Specific Integrated Circuit, hence less circuitry is
observed. The Radio Frequency tuned circuit has 147 M Hz carrier frequency with four options viz., 17Khz,
19Khz, 22KHz and 25KHz.
The transmitted signals are received on coil L1 which acts as receiver antenna. The oscillator transistor
removes the received signals from 147MHz carrier frequency and fed to ASIC. The tank circuit formed by C1
and L1 gives the carrier frequency range. The current limiting resistor R1 and bypass capacitor C5 stabilizes
the oscillator. The resistor R2, R3 and R4 provide the biasing voltage to the oscillator transistor T1. Capacitors
C2 and C3 are there to bypass the noise and harmonics present in the received signals. Through coupling
capacitor C7 output of the RF Receiver is fed to ASIC.
The ASIC manipulates the received signal and gives out four channels as output viz., 17KHz, 19KHz, 22KHz
and 25KHz. Each channel is amplified by pre-amplifier transistor T2 along with bias resistor R9. The output of
the pre-amplifier transistor is fed to relay driver stage to activate the respective relay ON. The Darlington pair
T3 and T4 are arranged in driver stage to drive the low impedance relay.
Parts List
SEMICONDUCTORS:
IC ASIC 1
T1 BC 547 NPN Transistor 1
T2 BF 494 NPN Transistor 4
T3&T4 BC 548 NPN Transistor 8
RESISTORS:
R1 & R2 270 K Ohm ¼ Watt 2
R3 & R6 220 Ohm ¼ Watt 2
R4 2.2 K Ohm ¼ Watt 1
R5 2.2 M Ohm ¼ Watt 1
R7 10 K Ohm ¼ Watt 1
SVCP- Electronics & Telecommunication Engineering15

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
R8 100 Ohm ¼ Watt 4
R9 560 Ohm ¼ Watt 4
CAPACITORS:
C1, C2 0.001 Pico Farad Capacitor 2
C3 & C7 0.022 Pico Farad Capacitor 2
C4 4.7 Pico Farad Capacitor 1
C5 & C6 0.01 Micro Farad Capacitor 2
L1 RF Coil 200mH 1
SVCP- Electronics & Telecommunication Engineering16

SVCP- Electronics & Telecommunication Engineering16
FIGURE.3.5-CIRCUIT DIAGRAM OF WI-FI RECEIVER
T4
T3
T4
T3T
2
T2
C
C3
L1
C2
C
R1
R2
C4
T1
+
1111198
1234567
ASIC
R
R
+
C
CR
R4
R5
R6
R7
R9
R9

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
A relay is an electrically operated switch. Many relays use an electromagnet to operate a switching
mechanism mechanically, but other operating principles are also used. Relays are used where it is
necessary to control a circuit by a low-power signal (with complete electrical isolation between
control and controlled circuits), or where several circuits must be controlled by one signal. The first
relays were used in long distance telegraph circuits, repeating the signal coming in from one circuit
and re-transmitting it to another. Relays were used extensively in telephone exchanges and early
computers to perform logical operations.
A type of relay that can handle the high power required to directly drive an electric motor is called a
contactor. Solid-state relays control power circuits with no moving parts, instead using a
semiconductor device to perform switching. Relays with calibrated operating characteristics and
sometimes multiple operating coils are used to protect electrical circuits from overload or faults; in
modern electric power systems these functions are performed by digital instruments still called
"protective relays".
3.8 Magnetic Field Sensor
(MG-BTA or MG-DIN)
Figure.3.6 Hall effect sensor
The Magnetic Field Sensor can be used for a variety of interesting experiments involving magnetic
fields.
· Measure and study the Earth’s magnetic field.
· Determine the direction of magnetic north.
· Study the magnetic field near a permanent magnet.
“SVCP- Electronics & Telecommunication Engineering”18

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
· Measure the field near a current-carrying wire.
· Measure the field at the opening of a solenoid.
The Magnetic Field Sensor is designed for use with the following interfaces:
· Vernier LabPro® (for use with computers, TI graphing calculators, or Palm OS® handhelds)
· Texas Instruments CBL 2™ or original CBL™ System
· Universal Lab Interface (ULI)
· Serial Box Interface
Using the Magnetic Field Sensor with a Computer
This sensor can be used with a LabPro, ULI, or Serial Box Interface. Here is the general procedure to
follow when using the Magnetic Field Sensor with a computer:
1. Connect the Magnetic Field Sensor to any of the analog ports on LabPro (in most cases, Channel 1
is used) or to a ULI or SBI.
2. Start the Logger Pro® or Logger Lite™ software on a computer.
3. You are now ready to collect data. Logger Pro or Logger Lite will identify the Magnetic Field
Sensor and load a calibration. Click and begin collecting data.
4. If you are using Logger Pro software, an alternative to Step 3 is to open an experiment file in the
Logger Pro Probes & Sensors folder.
Using the Magnetic Field Sensor with TI Handhelds
This sensor can be used with a TI graphing calculator and any of the following lab interfaces: LabPro,
CBL 2, or CBL. Here is the general procedure to follow when using the Magnetic Field Sensor with a
graphing calculator:
1. Load a data-collection program onto your calculator: · LabPro or CBL 2–Use the DataMate
program. This program can be transferred directly from LabPro or CBL to the TI graphing calculator.
Use the calculator-to-calculator link cable to connect the two devices. Put the calculator into the
Receive mode, and then press the Transfer button on the interface.
· Original CBL–If you are using the sensor with the original CBL, we recommend the PHYSICS
program. This program is available free on our web site at www.vernier.com. Load the program into
a calculator using TIConnect ™ software or TI-GRAPH LINK™.
2. Use the calculator-to-calculator link cable to connect the interface to the TI graphing calculator
using the I/O ports located on each unit. Be sure to push both plugs in firmly.
“SVCP- Electronics & Telecommunication Engineering”19

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
3. Connect the Magnetic Field Sensor to any of the analog ports on the interface. In most cases,
Channel 1 is used.
4. Start the data-collection program, and you are ready to collect data.
Using the Magnetic Field Sensor with Palm OS Handhelds
1. This sensor can be used with a Palm OS handheld and the LabPro.
2. Connect the Palm OS handheld, LabPro, and the Magnetic Field Sensor.
3. Start Data Pro.
4. Tap New, or choose New from the Data Pro menu. Tap New again. The Magnetic Field Sensor
will be identified automatically.
5. You are now ready to collect data.
3.9 How the Magnetic Field Sensor Works
The sensor uses a Hall-effect transducer. It produces a voltage that is linear with magnetic field. The
sensor measures the component of the magnetic field that is perpendicular to the flat sensor covered
with black heat-shrink tubing. The maximum output occurs when the white dot on the sensor points
toward a magnetic south pole. When no magnetic field is present, the sensor should read about 2
volts. This is called the offset voltage. A magnetic field will cause the voltage to increase or decrease,
depending on the direction of the field. The minimum voltage is 0 volts and the maximum is 4 volts.
If the offset voltage is set incorrectly, or if the magnetic field is beyond the range of the sensor, the
voltage will reach one of these limits.
Figure.3.7-Magenetic field of earth
“SVCP- Electronics & Telecommunication Engineering”20

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
The switch on the box is used to select the amplification. The low amplification is used to measure
relatively strong magnetic fields around permanent magnets and electromagnets. Each volt represents
32 gauss (3.2 ´ 10-3 tesla). The range of the sensor is ±64 gauss or ±6.4 ´ 10-3 tesla. The high
amplification is used mainly to measure the magnetic field of the Earth and very weak fields. It can
be used for other magnets, but the sensor must remain in one position so that the reading is not
affected by the background field of the Earth. It is 20 times more sensitive than the low amplification.
Each volt represents 1.6 gauss
(1.6 ´ 10-4 tesla). The range of the sensor is ±3.2 gauss or ±3.2 ´ 10-4 tesla. If the sensor tube is held
vertically and rotated until the maximum voltage is found, magnetic north will be perpendicular to the
sensor in the direction of the white dot. The magnetic inclination in your area can be found by
holding the tube so that the white dot is facing north, and rotating the sensor end of the tube down
until the voltage reaches a maximum. The angle of the tube from vertical is the magnetic inclination.
Note that the north pole of a freely suspended magnet points north, since the magnetic pole of the
Earth in the northern hemisphere is a south magnetic pole.You should not have to perform a new
calibration when using the Magnetic Field Sensor in the classroom. We have set the sensor to match
our stored calibration before shipping it. You can simply use the appropriate calibration file that is
stored in your data-collection software from Vernier.
Stored Calibration Values for the Magnetic Field Sensor
Low amplification in gauss slope = 32.25 gauss/V intercept = –80.625 gauss
High amplification in gauss slope = 1.6 gauss/V intercept = –3.2 gauss
Low amplification in millitesla slope = 3.225 mT/V intercept = –8.063 mT
High amplification in millitesla slope = 0.160 mT/V intercept = –0.320 mT
It is not practical to calibrate the Magnetic Field Sensor without reference to a known source of
magnetic field. It is useful, however, to zero the Magnetic Field Sensor. Position the sensor, and zero
it using your data-collection software. Now, move the magnetic field source, and not the sensor, to
explore the spatial variations of the field. Moving the sensor will upset the zero since the background
magnetic field in lab probably varies with position.
“SVCP- Electronics & Telecommunication Engineering”21

123
KIA 78xx
Series
Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 4
POWER SUPPLY UNIT & OTHER COMPONENTS
4.1 POWER SUPPLY UNIT
The circuit needs two different voltages, +5V & +12V, to work. These dual voltages are supplied by
this specially designed power supply. The power supply, unsung hero of every electronic circuit,
plays very important role in smooth running of the connected circuit. The main object of this ‘power
supply’ is, as the name itself implies, to deliver the required amount of stabilized and pure power to
the circuit. Every typical power supply contains the following sections:
1. Step-down Transformer: The conventional supply, which is generally available to the user, is 230V
AC. It is necessary to step down the mains supply to the desired level. This is achieved by using
suitably rated step-down transformer. While designing the power supply, it is necessary to go for
little higher rating transformer than the required one. The reason for this is, for proper working of the
regulator IC (say KIA 7805) it needs at least 2.5V more than the expected output voltage
2. Rectifier stage: Then the step-downed Alternating Current is converted into Direct Current. This
rectification is achieved by using passive components such as diodes. If the power supply is designed
for low voltage/current drawing loads/circuits (say +5V), it is sufficient to employ full-wave rectifier
with centre-tap transformer as a power source. While choosing the diodes the PIV rating is taken into
consideration.
3. Filter stage: But this rectified output contains some percentage of superimposed A.C. ripples. So to
filter these A.C. components filter stage is built around the rectifier stage. The cheap, reliable, simple
and effective filtering for low current drawing loads (say upto 50 mA) is done by using shunt
capacitors. This electrolytic capacitor has polarities, take care while connecting the circuit.
“SVCP- Electronics & Telecommunication Engineering”22

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
4. Voltage Regulation: The filtered D.C. output is not stable. It varies in accordance with the
fluctuations in mains supply or varying load current. This variation of load current is observed due to
voltage drop in transformer windings, rectifier and filter circuit. These variations in D.C. output
voltage may cause inaccurate or erratic operation or even malfunctioning of many electronic circuits.
For example, the circuit boards which are implanted by CMOS or TTL ICs.
The stabilization of D.C. output is achieved by using the three terminal voltage regulator IC. This
regulator IC comes in two flavors: 78xx for positive voltage output and 79xx for negative voltage
output. For example 7805 gives +5V output and 7905 gives -5V stabilized output. These regulator
ICs have in-built short-circuit protection and auto-thermal cutout provisions. If the load current is
very high the IC needs ‘heat sink’ to dissipate the internally generated power.
Circuit Description: A d.c. power supply which maintains the output voltage constant irrespective of
a.c. mains fluctuations or load variations is known as regulated D.C. power supply. It is also referred
as full-wave regulated power supply as it uses four diodes in bridge fashion with the transformer.
This laboratory power supply offers excellent line and load regulation and output voltages of +5V &
+12 V at output currents up to one amp.
“SVCP- Electronics & Telecommunication Engineering”23
230AC
C
D21
C2
C3
D
9V
C4
+12V+5V
230V AC
Figure.4.1-Circuit Diagram of Full Wave Regulated Power Supply

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Parts List:
SEMICONDUCTORS
IC1
IC2
7812 Regulator IC
7805 Regulator IC
1
1
D1& D2 1N4007 Rectifier Diodes 2
CAPACITORS
C1 1000 µf/25V Electrolytic 1
C2 to C4 0.1µF Ceramic Disc type 3
MISCELLANEOUS
X1 230V AC Pri,14-0-14 1Amp Sec Transformer 1
1. Step-down Transformer: The transformer rating is 230V AC at Primary and 12-0-12V, 1Ampers
across secondary winding. This transformer has a capability to deliver a current of 1Ampere, which is
more than enough to drive any electronic circuit or varying load. The 12VAC appearing across the
secondary is the RMS value of the waveform and the peak value would be 12 x 1.414 = 16.8 volts.
This value limits our choice of rectifier diode as 1N4007, which is having PIV rating more than
16Volts.
2. Rectifier Stage: The two diodes D1 & D2 are connected across the secondary winding of the
transformer as a full-wave rectifier. During the positive half-cycle of secondary voltage, the end A of
the secondary winding becomes positive and end B negative. This makes the diode D1 forward
biased and diode D2 reverse biased. Therefore diode D1 conducts while diode D2 does not. During
the negative half-cycle, end A of the secondary winding becomes negative and end B positive.
Therefore diode D2 conducts while diode D1 does not. Note that current across the centre tap
terminal is in the same direction for both half-cycles of input A.C. voltage. Therefore, pulsating D.C.
is obtained at point ‘C’ with respect to Ground.
3. Filter Stage: Here Capacitor C1 is used for filtering purpose and connected across the rectifier
output. It filters the a.c. components present in the rectified D.C. and gives steady D.C. voltage. As
the rectifier voltage increases, it charges the capacitor and also supplies current to the load. When
capacitor is charged to the peak value of the rectifier voltage, rectifier voltage starts to decrease. As
“SVCP- Electronics & Telecommunication Engineering”24
IC1 7812 IC2 7805

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
the next voltage peak immediately recharges the capacitor, the discharge period is of very small
duration. Due to this continuous charge-discharge-recharge cycle very little ripple is observed in the
filtered output. Moreover, output voltage is higher as it remains substantially near the peak value of
rectifier output voltage. This phenomenon is also explained in other form as: the shunt capacitor
offers a low reactance path to the A.C. components of current and open circuit to D.C. component.
During positive half cycle the capacitor stores energy in the form of electrostatic field. During
negative half cycle, the filter capacitor releases stored energy to the load.
4. Voltage Regulation Stage: Across the point ‘D’ and Ground there is rectified and filtered D.C. In
the present circuit KIA 7812 three terminal voltage regulator IC is used to get +12V and KIA 7805
voltage regulator IC is used to get +5V regulated d.c. output. In the three terminals, pin 1 is input i.e.,
rectified & filtered D.C. is connected to this pin. Pin 2 is common pin and is grounded. The pin 3
gives the stabilized D.C. output to the load. The circuit shows two more decoupling capacitors C2 &
C3, which provides ground path to the high frequency noise signals. Across the point ‘E’ and ‘F’ with
respect to ground +5V & +12V stabilized or regulated D.C output is measured, which can be
connected to the required circuit.
4.2 BUFFER, DRIVER & SWITCHING MODULE
When the user programs the schedule for the automation using GUI [Graphical User Interface]
software, it actually sends 5-bit control signals to the circuit. The present circuit provides interfacing
with the Microcontroller and the controlling circuitry. This circuit takes the 5-bit control signal,
isolates the Microcontroller from this circuitry, boosts control signals for required level and finally
fed to the driver section to actuate relay. These five relays in turn sends RC5 coded commands with
respect to their relay position.
HEX BUFFER / CONVERTER [NON-INVERTER] IC 4050: Buffers does not affect the logical
state of a digital signal (i.e. logic 1 input results into logic 1 output where as logic 0 input results into
logic 0 output). Buffers are normally used to provide extra current drive at the output, but can also be
used to regularise the logic present at an interface. And Inverters are used to complement the logical
state (i.e. logic 1 input results into logic 0 output and vice versa). Also Inverters are used to provide
extra current drive and, like buffers, are used in interfacing applications. This 16-pin DIL packaged
IC 4050 acts as Buffer as-well-as a Converter. The input signals may be of 2.5 to 5V digital TTL
compatible or DC analogue the IC gives 5V constant signal output. The IC acts as buffer and
“SVCP- Electronics & Telecommunication Engineering”25

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
provides isolation to the main circuit from varying input signals. The working voltage of IC is 4 to 16
Volts and propagation delay is 30 nanoseconds. It consumes 0.01 mill Watt power with noise
immunity of 3.7 V and toggle speed of 3 Megahertz.
ULN 2004: Since the digital outputs of the some circuits cannot sink much current, they are not
capable of driving relays directly. So, high-voltage high-current Darlington arrays are designed for
interfacing low-level logic circuitry and multiple peripheral power loads. The series ULN2000A/L
ICs drive seven relays with continuous load current ratings to 600mA for each input. At an
appropriate duty cycle depending on ambient temperature and number of drivers turned ON
simultaneously, typical power loads totalling over 260W [400mA x 7, 95V] can be controlled.
Typical loads include relays, solenoids, stepping motors, magnetic print hammers, multiplexed LED
and incandescent displays, and heaters. These Darlington arrays are furnished in 16-pin dual in-line
plastic packages (suffix A) and 16-lead surface-mountable SOICs (suffix L). All devices are pinned
with outputs opposite inputs to facilitate ease of circuit board layout.
Figure.4.2-Pin layout IC ULN 2004
“SVCP- Electronics & Telecommunication Engineering”26
Vcc
1 16
2
3
4
5
6
7
8
11
12
14
15
13
10
9
IC ULN 2004

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
The input of ULN 2004 is TTL-compatible open-collector outputs. As each of these outputs can sink
a maximum collector current of 500 mA, miniature MICROCONTROLLER relays can be easily
driven. No additional free-wheeling clamp diode is required to be connected across the relay since
each of the outputs has inbuilt free-wheeling diodes. The Series ULN20x4A/L features series input
resistors for operation directly from 6 to 15V CMOS or PMOS logic outputs.
1N4148 signal diode: Signal diodes are used to process information (electrical signals) in circuits, so they
are only required to pass small currents of up to 100mA. General purpose signal diodes such as the 1N4148
are made from silicon and have a forward voltage drop of 0.7V.
“SVCP- Electronics & Telecommunication Engineering”27

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Figure.4.3-CIRCUIT DIAGRAM OF BUFFER, DRIVER & SWITCHING STAGE
“SVCP- Electronics & Telecommunication Engineering”28
5
3
9
7
8
1
11
4
2
10
6
12
14
15
RL2
RL3
RL4
RL5
IC1
I
C
2
2
1
4
3
8
9
5
15
16
1312
6 11
14
7
10
R1 TO R5
D1 TO D5
+5V
Gnd
+12 V
Commands from
MICROCONTROLLE
R
D6-D10
R6-R10
RL1
N/C
COM-1
N/C
COM-2
N/C
COM-3
N/C
COM-4
N/C
COM-5

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Parts List:
SEMICONDUCTORS
IC1 4050 HEX BUFFER/CONVERTER(NON-INVERTER) 1
IC2 2004 DARLINGTON ARRY 1
RESISTORS
R1 to R5 220 Ohm ¼ Watt Carbon Resistors 5
R6 to R10 2.2 K Ohm ¼ Watt Carbon Resistors 5
DIODES
D1to D5 1N4148 SIGNAL Diodes 5
D6 to D10 Red Indicator LEDs 5
MISCELLANEOUS
RL1-RL5 12 V, 700 Ohm DPDT Reed Relays 5
Circuit Description:
The Hex Buffer/Inverter IC1’s working voltage of +5V is applied at pin-1 and five control signals
are applied at input pins 3, 5, 7, 9 & 11. Thus the signal supplying circuit [i.e.
MICROCONTROLLER] is isolated from this Buffer & Driver circuit. Further the grounding
resistors R1 to R5 prevents the abnormal voltage levels passing inside the IC1. The buffered
outputs are acquired at pins 2, 4, 6, 10, & 12. Thus the varying input is further stabilized and fed to
signal diodes [D1 to D5]. As the load is inductive, there is a chance of producing back e.m.f. So to
cope with this back e.m.f, signal diodes are used. But this signal level is not strong enough to drive
the low impedance relay. So, IC2 Darlington driver is used. Its working voltage is +12 V and only
five input/output pins are used. The output signal from the Darlington driver IC is strong enough to
actuate five relays.
These relays with +12V working voltage can be used to produce five command signals with RC5
format. The N/O [Normally Open] contact of each relay produces one command signal with the
help of RC5 Transmitter Circuit. The five relays activation with their corresponding command
signal production is tabulated as below:
“SVCP- Electronics & Telecommunication Engineering”29

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
RELAYCOMMAND
NUMBER
COMMAND
SIGNAL
RL1 COM-1 TURN LEFT
RL2 COM-2 TURN RIGHT
RL3 COM-3MOVE
BACKWARD
RL4 COM-4 MOVE FORWARD
RL5 COM-5
SWITCH ON/OFF
THE
SUCKING DEVICE
“SVCP- Electronics & Telecommunication Engineering”30

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 5
BASIC DESIGN & OPERATION
5.1 BASIC CIRCUITRY
A simple electromagnetic relay consists of a coil of wire surrounding a soft iron core, an iron yoke
which provides a low reluctance path for magnetic flux, a movable iron armature, and one or more
sets of contacts (there are two in the relay pictured). The armature is hinged to the yoke and
mechanically linked to one or more sets of moving contacts. It is held in place by a spring so that
when the relay is de-energized there is an air gap in the magnetic circuit. In this condition, one of
the two sets of contacts in the relay pictured is closed, and the other set is open. Other relays may
have more or fewer sets of contacts depending on their function. The relay in the picture also has a
wire connecting the armature to the yoke. This ensures continuity of the circuit between the
moving contacts on the armature, and the circuit track on the printed circuit board (PCB) via the
yoke, which is soldered to the PCB.
When an electric current is passed through the coil it generates a magnetic field that attracts the
armature, and the consequent movement of the movable contact(s) either makes or breaks
(depending upon construction) a connection with a fixed contact. If the set of contacts was closed
when the relay was de-energized, then the movement opens the contacts and breaks the connection,
and vice versa if the contacts were open. When the current to the coil is switched off, the armature
is returned by a force, approximately half as strong as the magnetic force, to its relaxed position.
Usually this force is provided by a spring, but gravity is also used commonly in industrial motor
starters. Most relays are manufactured to operate quickly. In a low-voltage application this reduces
noise; in a high voltage or current application it reduces arcing.
When the coil is energized with direct current, a diode is often placed across the coil to dissipate
the energy from the collapsing magnetic field at deactivation, which would otherwise generate a
voltage spike dangerous to semiconductor circuit components. Some automotive relays include a
diode inside the relay case. Alternatively, a contact protection network consisting of a capacitor
and resistor in series (snubber circuit) may absorb the surge. If the coil is designed to be energized
with alternating current (AC), a small copper "shading ring" can be crimped to the end of the
“SVCP- Electronics & Telecommunication Engineering”31

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
solenoid, creating a small out-of-phase current which increases the minimum pull on the armature
during the AC cycle.[1]
A solid-state relay uses a thyristor or other solid-state switching device, activated by the control
signal, to switch the controlled load, instead of a solenoid. An optocoupler (a light-emitting diode
(LED) coupled with a photo transistor) can be used to isolate control and controlled circuits.
5.2 Types of Relays:
A latching relay has two relaxed states (bistable). These are also called "impulse", "keep", or "stay"
relays. When the current is switched off, the relay remains in its last state. This is achieved with a
solenoid operating a ratchet and cam mechanism, or by having two opposing coils with an over-
center spring or permanent magnet to hold the armature and contacts in position while the coil is
relaxed, or with a remanent core. In the ratchet and cam example, the first pulse to the coil turns the
relay on and the second pulse turns it off. In the two coil example, a pulse to one coil turns the
relay on and a pulse to the opposite coil turns the relay off. This type of relay has the advantage
that it consumes power only for an instant, while it is being switched, and it retains its last setting
across a power outage. A remanent core latching relay requires a current pulse of opposite polarity
to make it change state.
1.Reed relay
A reed relay is a reed switch enclosed in a solenoid. The switch has a set of contacts inside an
evacuated or inert gas-filled glass tube which protects the contacts against atmospheric corrosion;
the contacts are made of magnetic material that makes them move under the influence of the field
of the enclosing solenoid. Reed relays can switch faster than larger relays, require only little power
from the control circuit, but have low switching current and voltage ratings.
2.Mercury-wetted relay
A mercury-wetted reed relay is a form of reed relay in which the contacts are wetted with mercury.
Such relays are used to switch low-voltage signals (one volt or less) where the mercury reduces the
contact resistance and associated voltage drop, for low-current signals where surface contamination
may make for a poor contact, or for high-speed applications where the mercury eliminates contact
bounce. Mercury wetted relays are position-sensitive and must be mounted vertically to work
properly. Because of the toxicity and expense of liquid mercury, these relays are now rarely used..
“SVCP- Electronics & Telecommunication Engineering”32

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
3.Polarized relay
A polarized relay placed the armature between the poles of a permanent magnet to increase
sensitivity. Polarized relays were used in middle 20th Century telephone exchanges to detect faint
pulses and correct telegraphic distortion. The poles were on screws, so a technician could first
adjust them for maximum sensitivity and then apply a bias spring to set the critical current that
would operate the relay.
4.Machine tool relay
A machine tool relay is a type standardized for industrial control of machine tools, transfer
machines, and other sequential control. They are characterized by a large number of contacts
(sometimes extendable in the field) which are easily converted from normally-open to normally-
closed status, easily replaceable coils, and a form factor that allows compactly installing many
relays in a control panel. Although such relays once were the backbone of automation in such
industries as automobile assembly, the programmable logic controller (PLC) mostly displaced the
machine tool relay from sequential control applications.
5.Contactor relay
A contactor is a very heavy-duty relay used for switching electric motors and lighting loads,
although contactors are not generally called relays. Continuous current ratings for common
contactors range from 10 amps to several hundred amps. High-current contacts are made with
alloys containing silver. The unavoidable arcing causes the contacts to oxidize; however, silver
oxide is still a good conductor.[2] Such devices are often used for motor starters. A motor starter is a
contactor with overload protection devices attached. The overload sensing devices are a form of
heat operated relay where a coil heats a bi-metal strip, or where a solder pot melts, releasing a
spring to operate auxiliary contacts. These auxiliary contacts are in series with the coil. If the
overload senses excess current in the load, the coil is de-energized. Contactor relays can be
extremely loud to operate, making them unfit for use where noise is a chief concern.
6.Solid-state relay
“SVCP- Electronics & Telecommunication Engineering”33

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
A solid state relay (SSR) is a solid state electronic component that provides a similar function to an
electromechanical relay but does not have any moving components, increasing long-term
reliability. With early SSR's, the tradeoff came from the fact that every transistor has a small
voltage drop across it. This voltage drop limited the amount of current a given SSR could handle.
As transistors improved, higher current SSR's, able to handle 100 to 1,200 Amperes, have become
commercially available. Compared to electromagnetic relays, they may be falsely triggered by
transients.
7.Solid state contactor relay
A solid state contactor is a heavy-duty solid state relay, including the necessary heat sink, used for
switching electric heaters, small electric motors and lighting loads; where frequent on/off cycles
are required. There are no moving parts to wear out and there is no contact bounce due to vibration.
They are activated by AC control signals or DC control signals from Programmable logic
controller (PLCs), PCs, Transistor-transistor logic (TTL) sources, or other microprocessor and
microcontroller controls.
8.Buchholz relay
A Buchholz relay is a safety device sensing the accumulation of gas in large oil-filled transformers,
which will alarm on slow accumulation of gas or shut down the transformer if gas is produced
rapidly in the transformer oil.
9. Forced-guided contacts relay
A forced-guided contacts relay has relay contacts that are mechanically linked together, so that
when the relay coil is energized or de-energized, all of the linked contacts move together. If one set
of contacts in the relay becomes immobilized, no other contact of the same relay will be able to
move. The function of forced-guided contacts is to enable the safety circuit to check the status of
the relay. Forced-guided contacts are also known as "positive-guided contacts", "captive contacts",
"locked contacts", or "safety relays".
10.Overload protection relay
Electric motors need overcurrent protection to prevent damage from over-loading the motor, or to
protect against short circuits in connecting cables or internal faults in the motor windings. [3] One
“SVCP- Electronics & Telecommunication Engineering”34

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
type of electric motor overload protection relay is operated by a heating element in series with the
electric motor. The heat generated by the motor current heats a bimetallic strip or melts solder,
releasing a spring to operate contacts. Where the overload relay is exposed to the same
environment as the motor, a useful though crude compensation for motor ambient temperature is
provided.
Figure.5.1-Pole and throw Circuit symbols of relays.
(C denotes the common terminal in SPDT and DPDT types.)
Since relays are switches, the terminology applied to switches is also applied to relays. A relay will
switch one or more poles, each of whose contacts can be thrown by energizing the coil in one of
three ways:
Normally-open (NO) contacts connect the circuit when the relay is activated; the circuit is
disconnected when the relay is inactive. It is also called a Form A contact or "make" contact.
Normally-closed (NC) contacts disconnect the circuit when the relay is activated; the circuit is
connected when the relay is inactive. It is also called a Form B contact or "break" contact.
Change-over (CO), or double-throw (DT), contacts control two circuits: one normally-open contact
and one normally-closed contact with a common terminal. It is also called a Form C contact or
“SVCP- Electronics & Telecommunication Engineering”35

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
"transfer" contact ("break before make"). If this type of contact utilizes a "make before break"
functionality, then it is called a Form D contact.
The following designations are commonly encountered:
SPST – Single Pole Single Throw. These have two terminals which can be connected or
disconnected. Including two for the coil, such a relay has four terminals in total. It is ambiguous
whether the pole is normally open or normally closed. The terminology "SPNO" and "SPNC" is
sometimes used to resolve the ambiguity.
SPDT – Single Pole Double Throw. A common terminal connects to either of two others.
Including two for the coil, such a relay has five terminals in total.
DPST – Double Pole Single Throw. These have two pairs of terminals. Equivalent to two
SPST switches or relays actuated by a single coil. Including two for the coil, such a relay has six
terminals in total. The poles may be Form A or Form B (or one of each).
DPDT – Double Pole Double Throw. These have two rows of change-over terminals.
Equivalent to two SPDT switches or relays actuated by a single coil. Such a relay has eight
terminals, including the coil.
The "S" or "D" may be replaced with a number, indicating multiple switches connected to a single
actuator. For example 4PDT indicates a four pole double throw relay (with 14 terminals).
EN 50005 are among applicable standards for relay terminal numbering; a typical EN 50005-
compliant SPDT relay's terminals would be numbered 11, 12, 14, A1 and A2 for the C, NC, NO,
and coil connections, respectively.
5.3 Applications of Relays:
Relays are used to and for, control a high-voltage circuit with a low-voltage signal, as in some
types of modems or audio amplifiers. Control a high-current circuit with a low-current signal, as in
the starter solenoid of an automobile. Detect and isolate faults on transmission and distribution
lines by opening and closing circuit breakers (protection relays). Isolate the controlling circuit from
the controlled circuit when the two are at different potentials, for example when controlling a
mains-powered device from a low-voltage switch. The latter is often applied to control office
“SVCP- Electronics & Telecommunication Engineering”36

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
lighting as the low voltage wires are easily installed in partitions, which may be often moved as
needs change. They may also be controlled by room occupancy detectors in an effort to conserve
energy. Logic functions. For example, the boolean AND function is realized by connecting
normally open relay contacts in series, the OR function by connecting normally open contacts in
parallel. The change-over or Form C contacts perform the XOR (exclusive or) function. Similar
functions for NAND and NOR are accomplished using normally closed contacts. The Ladder
programming language is often used for designing relay logic networks. Early computing before
vacuum tubes and transistors, relays were used as logical elements in digital computers. Because
relays are much more resistant than semiconductors to nuclear radiation, they are widely used in
safety-critical logic, such as the control panels of radioactive waste-handling machinery. Time
delay functions. Relays can be modified to delay opening or delay closing a set of contacts. A very
short (a fraction of a second) delay would use a copper disk between the armature and moving
blade assembly. Current flowing in the disk maintains magnetic field for a short time, lengthening
release time. For a slightly longer (up to a minute) delay, a dashpot is used. A dashpot is a piston
filled with fluid that is allowed to escape slowly. The time period can be varied by increasing or
decreasing the flow rate. For longer time periods, a mechanical clockwork timer is installed.
Relay application considerations
Selection of an appropriate relay for a particular application requires evaluation of many different
factors:
Number and type of contacts – normally open, normally closed, (double-throw)
Contact sequence – "Make before Break" or "Break before Make". For example, the old style
telephone exchanges required Make-before-break so that the connection didn't get dropped while
dialling the number.
Rating of contacts – small relays switch a few amperes, large contactors are rated for up to
3000 amperes, alternating or direct current
Voltage rating of contacts – typical control relays rated 300 VAC or 600 VAC, automotive
types to 50 VDC, special high-voltage relays to about 15 000 V
Coil voltage – machine-tool relays usually 24 VAC, 120 or 250 VAC, relays for switchgear
may have 125 V or 250 VDC coils, "sensitive" relays operate on a few milliamperes
Coil current
“SVCP- Electronics & Telecommunication Engineering”37

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Package/enclosure – open, touch-safe, double-voltage for isolation between circuits, explosion
proof, outdoor, oil and splash resistant, washable for printed circuit board assembly
Assembly – Some relays feature a sticker that keeps the enclosure sealed to allow PCB post
soldering cleaning, which is removed once assembly is complete.
Mounting – sockets, plug board, rail mount, panel mount, through-panel mount, enclosure for
mounting on walls or equipment
Switching time – where high speed is required
"Dry" contacts – when switching very low level signals, special contact materials may be
needed such as gold-plated contacts
Contact protection – suppress arcing in very inductive circuits
Coil protection – suppress the surge voltage produced when switching the coil current
Isolation between coil circuit and contacts
Aerospace or radiation-resistant testing, special quality assurance
Expected mechanical loads due to acceleration – some relays used in aerospace applications
are designed to function in shock loads of 50 g or more
Accessories such as timers, auxiliary contacts, pilot lamps, test buttons
Regulatory approvals
Stray magnetic linkage between coils of adjacent relays on a printed circuit board.
“SVCP- Electronics & Telecommunication Engineering”38

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Timer IC 555
Figure.5.2- Pin configuration
The 555 timer is an extremely versatile integrated circuit which can be used to build lots of different
circuits.
5.4 Astable circuits
“SVCP- Electronics & Telecommunication Engineering”39

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Astable circuits produce pulses. The circuit most people use to make a 555 astable looks like this:
As you can see, the frequency, or repetition rate, of the output pulses is determined by the
values of two resistors, R1 and R2 and by the timing capacitor, C.
The design formula for the frequency of the pulses is:
The HIGH and LOW times of each pulse can be calculated from:
The duty cycle of the waveform, usually expressed as a percentage, is given by:
“SVCP- Electronics & Telecommunication Engineering”40

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
An alternative measurement of HIGH and LOW times is the mark space ratio:
Before calculating a frequency, you should know that it is usual to make R1=1 k because this
helps to give the output pulses a duty cycle close to 50%, that is, the HIGH and LOW times of the
pulses are approximately equal.
Remember that design formulae work in fundamental units. However, it is often more convenient
to work with other combinations of units:
resistance Capacitance period frequency
F s Hz
µF s Hz
µF ms kHz
With R values in M and C values in µF, the frequency will be in Hz. Alternatively, with R
values in k and C values in µF, frequencies will be in kHz.
Suppose you want to design a circuit to produce a frequency of approximately 1 kHz for an alarm
application. What values of R1, R2 and C should you use?
“SVCP- Electronics & Telecommunication Engineering”41

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
R1 should be 1k, as already explained. This leaves you with the task of selecting values for R2
and C. The best thing to do is to rearrange the design formula so that the R values are on the right
hand side:
Now substitute for R1 and f :
You are using R values in k and f values in kHz, so C values will be in µF.
To make further progress, you must choose a value for C. At the same time, it is important to
remember that practical values for R2 are between 1 k and 1M. Suppose you choose C =
10 nF = 0.01 µF:
that is:
and:
This is within the range of practical values and you can choose values from the E12 range of
68 k or 82 k. (The E12 range tells you which values of resistor are manufactured and easily
available from suppliers.)
A test circuit can be set up on prototype board, as follows:
“SVCP- Electronics & Telecommunication Engineering”42

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
With the values of R1, R2 and C shown, the LED should flash at around 10 Hz.
What happens if you replace R2 with an LDR or a thermistor? This gives an astable which
changes frequency in response to light intensity, or with temperature.
Astable component selection
With a little practice, it is quite easy to choose appropriate values for a 555 timer astable. To make
things even easier, you might like to download the DOCTRONICS 555 timer component
selection program.
The program works with Windows 95 and looks like this:
“SVCP- Electronics & Telecommunication Engineering”43

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
.
More astables
“SVCP- Electronics & Telecommunication Engineering”44

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Extended duty cycle astable: An extremely useful variation of the standard astable circuit involves
adding a diode in parallel with R2:
This simple addition has a dramatic effect on the behaviour of the circuit. The timing capacitor, C,
is now filled only through R1 and emptied only through R2.
The design equation for the output pulse frequency is:
HIGH and LOW times are calculated from:
With this circuit, the duty cycle can be any value you want. If R1 > R2, the duty cycle will be
greater than 50% (equivalent to a mark space ratio of more than 1.0). On the other hand, if
R2 > R1, the duty cycle will be less than 50% (mark space ratio less than 1.0).
“SVCP- Electronics & Telecommunication Engineering”45

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
This version of the 555 astable is used in the cyclist/pedestrian safety lights project.
Minimum component astable:
This is a cheap and cheerful astable using just one resistor and one capacitor as the timing
components:
Note that there is no connection to pin 7 and that R1 is linked to the output, pin 3.
The design equation for the circuit is:
The HIGH and LOW times are supposed to be equal, giving a duty cycle of 50% (equivalent to a
mark space ratio of 1.0).
“SVCP- Electronics & Telecommunication Engineering”46

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
However, if you build this circuit, it is probable that the HIGH time will be longer than the LOW
time. (This happens because the maximum voltage reached by the output pulses is less than the
power supply voltage.) Things will get worse if the output current increases.
If you need an astable circuit which can be adjusted to give an accurate frequency, this circuit is
not the one to choose.
Diminishing frequency astable:
The excitement and realism of electronic games, including roulette, can be increased using an
astable circuit which is triggered to produce rapid pulses initially, but which then slows down and
eventually stops altogether.
It is easy to modify the basic 555 astable circuit to produce this result:
When the 'go' button is pressed, the 47 µF capacitor in parallel with the timing network, R1, R2
and C, charges up very quickly through the 100 resistor. When the button is released, the
astable continues to oscillate but the charge stored slowly leaks away, with the result that it takes
longer and longer to charge up the timing capacitor. To trigger the next pulse, the voltage across C
“SVCP- Electronics & Telecommunication Engineering”47

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
must increase to two thirds of the power supply voltage. After a while, the voltage across the
47 µF drops below this value and the pulses stop.
With the values shown, the initial frequency is about 100 Hz and the output pulses coast to a stop
after around 40 seconds.
The initial frequency can be calculated from the design equation for the basic 555 astable. To give
a realistic coasting time, you should use large values for the resistors R1 and R2. The coasting
time is determined by the 47 µF capacitor. Experiment with different values until you get the
effect you want.
.
RESET input
If the RESET input, pin 4, is held HIGH, a 555 astable circuit functions as normal. However, if
the RESET input is held LOW, output pulses are stopped. You can investigate this effect by
connecting a switch/pull down resistor voltage divider to pin 4:
“SVCP- Electronics & Telecommunication Engineering”48

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Figure.5.3-Circuit on prototype board:
Use the design formula, or the DOCTRONICS component selector program to calculate the
frequency of pulses you would expect to obtain with this circuit.
In an electronic die, provided the output pulses are fast enough, it is impossible to 'cheat' by
holding down the button for a definite length of time.
Think about how you could use this circuit together with a bistable as part of a burglar alarm.
Under normal conditions, the output of the bistable is LOW and the astable is stopped. If the
alarm is triggered, the output of the bistable goes HIGH and the pulses start, sounding the alarm.
.
Control voltage input:
By applying a voltage to the CONTROL VOLTAGE input, pin 5, you can alter the timing
characteristics of the device. In the astable mode, the control voltage can be varied from 1.7 V to
the power supply voltage, producing an output frequency which can be higher or lower than the
frequency set by the R1, R2, C timing network.
“SVCP- Electronics & Telecommunication Engineering”49

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
The CONTROL VOLTAGE input can be used to build an astable with a frequency modulated
output. In the circuit below, one astable is used to control the frequency of a second, giving a
'police siren' sound effect.
In most applications, the CONTROL VOLTAGE input is not used. It is usual to connect a 10 nF
capacitor between pin 5 and 0 V to prevent interference. You don't need to do this in building a
test circuit, but this 'bypass' or 'decoupling' capacitor should be included in your final circuit.
.
Monostable circuits
A monostable circuit produces a single pulse when triggered. The two questions about
monostables you immediately need to ask are:
How can the circuit be triggered to produce an output pulse?
How is the duration, or period, of the output pulse determined?
The circuit used to make a 555 timer monostable is:
“SVCP- Electronics & Telecommunication Engineering”50

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
As you can see, the trigger input is held HIGH by the 10 k pull up resistor and is pulsed LOW
when the trigger switch is pressed. The circuit is triggered by a falling edge, that is, by a sudden
transition from HIGH to LOW.
The trigger pulse, produced by pressing the button, must be of shorter duration than the intended
output pulse.
The period, , of the output pulse can be calculated from the design equation:
Remember again about compatible measurement units:
resistance Capacitance period
F s
“SVCP- Electronics & Telecommunication Engineering”51

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
µF s
µF ms
With R1 = 1 M and C = 1 µF, the output pulse will last for 1.1 s.
You can build a test version of the 555 monostable as follows:
“SVCP- Electronics & Telecommunication Engineering”52

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
By clicking on the monostable tab, the 555 component selection program can be used to
investigate the effect of different R1 and C values:
.
“SVCP- Electronics & Telecommunication Engineering”53

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
More about triggering
For a simple 555 monostable, the trigger pulse must be shorter than the output pulse. Sometimes
you want to trigger the monostable from a longer pulse:
“SVCP- Electronics & Telecommunication Engineering”54

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
The trigger network detects the falling edge at the end of each Vin pulse, producing a short 'spike'
which triggers the monostable at the appropriate time. The period of the monostable pulse is
shorter than the period of the Vin pulses.
If you want to trigger the monostable from a rising edge, you need to add a transistor NOT gate to
the trigger circuit:
If you build these circuits, it is interesting to investigate the action of the trigger network using an
oscilloscope.
.
555 as a transducer driver
A transducer is a subsystem which converts energy from one form into another, where one of the
forms is electrical. In an output transducer, for example, electrical energy can be converted into
light, sound, or movement.
The output of a 555 timer can deliver more than 100 mA of current. This means that output
transducers including buzzers, filament lamps, loudspeakers and small motors can be connected
directly to the output of the 555, pin 3.
“SVCP- Electronics & Telecommunication Engineering”55

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
You can use the 555 as a transducer driver, that is, as an electronic switch which turns the
transducer ON or OFF:
This circuit has an inverting Schmitt trigger action. The 'inverting' part of this description means
that when Vin is LOW, the output is HIGH, and when Vin is HIGH, the output is LOW.
In a 'Schmitt trigger' circuit there are two different switching thresholds. If Vin is slowly increased
starting from 0 V, the output voltage snaps from HIGH to LOW when Vin reaches a level equal to 2/3 of the power supply voltage. Once this level has been exceeded, decreasing Vin does not affect
the output until Vin drops below 1/3 of the power supply voltage. (If an input change in one
direction produces a different result from a change in the opposite direction, the circuit is said to
show hysteresis.)
If a filament lamp is connected between the positive power supply rail and the output, as shown
above, current flows through the lamp when the output voltage is LOW. In other words, the lamp
lights when the input voltage is HIGH.
If you connect the lamp between the output and 0 V, the circuit will still work, but the lamp will
light when the input voltage is LOW:
“SVCP- Electronics & Telecommunication Engineering”56

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
Note that, in both versions of the circuit pins 2 and 6 are joined together. The circuit can be
simplified by omitting the 10 nF bypass capacitor, and will continue to work when the RESET
input, pin 4 is left unconnected.
Some people are very fond of this circuit and use it whenever a transducer driver is required.
However, with a HIGH/LOW digital input signal the same result can be achieved more obviously
and at lower cost using a transistor switch circuit.
“SVCP- Electronics & Telecommunication Engineering”57

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CHAPTER 6
FUTURE DEVELOPMENT
1. Using GPS we can control the movements of Robot in remote areas.
2. In the same Robotic model we can implement fire detecting and extinguisher.
3. On further research in this field, the Wi-Fi technology can be implemented & used to replace present communication methods viz. Bluetooth, infrared etc
4. This technology holds great scope in automation & military applications
CHAPTER 7
“SVCP- Electronics & Telecommunication Engineering”58

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
CONCLUSION
The experimental work was carried to improve the design of robust wireless mobile bomb
disposal unit that would be capable of reaching close to the objects of threat and the real
scenario can be observed through an onboard video camera which can send back video feedback to
the observatory. From this experimental work we can conclude that use of Wi-Fi technology holds
future robotics allowing better control & range ability.
The Metal And Chemical Detecting Robot movements are controlled by user using Radio frequency
signals like moving right, left, back, and front. Once if the robot detects any metallic material in front
of it, then it starts generating sound signals or triggers buzzer unit and indicates metallic or chemical
bomb is detected.
REFERENCES:
-www.telerobotics.com
“SVCP- Electronics & Telecommunication Engineering”59

Diploma (E&TC) Wi-Fi metal & chemical bomb detector robot
-www.learnaboutrobots.com
- http://ranier.hq.nasa.gov/telerobotics_page/telerobotics.shtm
-Robotics:A reference guide to new technology by Rafael H. Bordini (page 16)
-Counter Terrorism Equipment by Ivn V. hog & Ray Hutchkins (page 144)
- P. Pounds, R. Maloy, P. Hynes and J. Roberts, Design of a Four-Rotor Aerial Robot, Australian
Conference on Robotics and Automation,2002
- A. Y. Ng, A. Coates, M. Diel, V. Ganapathi, J. Schulte, B. Tse, E. Berger and E. Liang, Inverted
autonomous helicopter flight via reinforcement learning, International Symposium on
Experimental Robotics, 2004
- K. Harbick, J. F. Montgomery, G. S. Sukhatme, Planar Spline Trajectory Following for an
Autonomous Helicopter, Journal of Advanced Computational Intelligence - Computational
Intelligence in Robotics and Automation, Vol. 8, No. 3, pp. 237-242, May 2004.
“SVCP- Electronics & Telecommunication Engineering”60