Embed Size (px)
Citation preview

Nonlinear Analysis 71 (2009) e818–e826
Contents lists available at ScienceDirect
Nonlinear Analysis
journal homepage: www.elsevier.com/locate/na
Replicator dynamics with Pigovian subsidy and capitation taxTakafumi Kanazawa, Yasuhiko Fukumoto, Toshimitsu Ushio ∗, Takurou MisakaGraduate School of Engineering Science, Osaka University, 1-3 Machikaneyama, Toyonaka, Osaka, 560-8531, Japan
a r t i c l e i n f o
Keywords:Evolutionary gameReplicator dynamicsTax and subsidy
a b s t r a c t
The selfish behaviors of individuals can cause an inefficient society in which the totalamount of the individuals’ utilities is notmaximized. To resolve the problem, a governmentsometimes tries to control the population by imposing a tax on and/or offering a subsidyto the individuals who belong to the population. The tax is roughly classified into ratetaxations and capitation taxes. Using an evolutionary game theory, the authors haveproposed a differential equation model with rate taxations to analyze their effects onplayers’ behaviors. In this paper, we propose a differential equation model with thecapitation taxes, and derive stability conditions of the target state. Moreover, we alsodiscuss an application of our model to selfish routing games.
© 2008 Elsevier Ltd. All rights reserved.
1. Introduction
In real world, there exist many populationswhich consist of a large number of selfish players interactingwith each other.In such a population, the purpose of each player often conflictswith the total purpose of the population, and a problem calleda social dilemma occurs [1]. Evolutionary game theory has been used as a powerful mathematical framework to analyzesocial dilemma [2], and the dilemma game is characterized by replicator dynamics in Ref. [3].Such a conflict is caused by several exogenous factors. Recently, a replicator equation on graphs [4] and amodel of active
linking [5] have been proposed to analyze effects of players’ interaction structures which is one of the exogenous factorsin evolutionary games. In the replicator equation on a regular graph, each node represents a player and each edge meansthat players corresponding to its nodes can play a game. In the model of active linking, players form interaction links whichhave specific life-times at different rates and their dynamics are proposed. In these models, the interaction structures aremodeled by transformations of the payoff matrices, and their effects on evolutions of cooperations are discussed [4,5].To resolve the conflict between eachplayer and thepopulation, another exogenous factor called externalityhas to be taken
into account. The word externality used in economics is an effect of a benefit obtained without paying payable costs or acost paid without obtaining a receivable benefit [6]. Since the social dilemmas involve externalities, they cannot be resolvedby the personal effort of each player. A government which has the comprehensive perspective is required for governingthe population. In real world, it corresponds to the rulers such as governments of countries or cities, and executivesof organizations or companies. To correct the externalities, a government sometimes tries to control the population byimposing a tax on and/or offering a subsidy to players who belong to the population. Such taxes and subsidies are calledPigovian taxes and Pigovian subsidies, respectively [6].The tax is roughly classified into rate taxations and capitation taxes. In the former, the tax is determined based on payoffs
the players earn while it is fixed in the latter. Using an evolutionary game theory, the authors have proposed a differentialequation model with rate taxations to analyze the effects of rate taxations on players’ behaviors [7]. In this model, thegovernment is willing to lead the population state to a desirable target state by using rate taxations and subsidies which
∗ Corresponding author. Tel.: +81 6 6850 6390; fax: +81 6 6850 6390.E-mail address: [email protected] (T. Ushio).
0362-546X/$ – see front matter© 2008 Elsevier Ltd. All rights reserved.doi:10.1016/j.na.2008.11.072

T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826 e819
depend on the target state. The amount of taxes which are imposed on each player is proportional to its payoff in the ratetaxation model. Different from the rate taxation, the capitation taxes are determined independent of the players’ payoffsand the same amount of taxes is imposed on each player.In this paper, we deal with the capitation tax. To analyze effects of capitation taxes on players’ behaviors, we propose
replicator dynamics with capitation taxes and subsidies. In this model, the government is willing to control the populationstate to a desirable target population state by collecting capitation taxes from all players and reallocating them as subsidiesdepending on the target state. We derive several properties of our model and provide the capitation tax which can makethe target state locally or globally asymptotically stable. Moreover, we also discuss an application of our model to selfishrouting games.
2. Preliminaries
Consider a population which consists of a large number of players. Each player adopts a strategy which is inherited fromits parent. In evolutionary games, repeatedly, two players are randomly drawn from the population to play a gamewith, andplayers produce offspring whose numbers depend on payoffs of the game [8]. In the context of social systems, this selectionprocess is perceived as a model where players change their strategies according to the payoffs which depends on the resultsof the games. In this paper, we use the following notations:
• S = {1, . . . , n}: the set of players’ pure strategies;• ei ∈ Rn (i = 1, . . . , n): a unit vector which corresponds to a pure strategy i;• ∆ ⊂ Rn: the mixed strategy space (a convex combination of ei for all i ∈ S);• int(∆): the interior of the mixed strategy space∆;• bd(∆): the boundary of the mixed strategy space∆;• C(x)(:= {i ∈ S|xi > 0}) ⊆ S: the carrier of the mixed strategy x;• x = (x1, . . . , xn)T ∈ ∆: a population state (a distribution of strategies, where xi is a proportion of players with strategyi);• A = (aij) ∈ Rn×n: the payoff matrix; and• u(x, y) := xTAy: the payoff function of players with mixed strategy x against y.
From the above definitions, conventional replicator dynamics is formulated as:
xi = {u(ei, x)− u(x, x)}xi (1)
for each strategy i ∈ S.
3. Rate taxations
We consider that the government collects a part of players’ payoffs at a taxation rate α ∈ [0, 1] and reallocating them assubsidies depending on the target state. If α = 0, then the government takes no taxes from the players. Such a situation iscalled non-intervention. On the other hand, if α = 1, then all payoffs which players earn are collected and reallocated by thegovernment. Such a situation is called complete intervention. Suppose that the number of players who adopt a strategy i ∈ Sis pi > 0 and the number of all players in the population is p =
∑i pi. If the government imposes the tax at rate of α on
each player, then the total payoff which is collected from players is α∑i piu(ei, x). Denoted by x
∗∈ ∆ is a target statewhich
the government considers as a desirable population state. Suppose that the more desirable strategy for the governmentplayers adopt, the more subsidies they are provided. Then, the subsidy which is provided to players with a strategy i isassumed to be x∗i α
∑j pju(ej, x). Note that a summation
∑i x∗
i α∑j pju(ej, x) of the reallocated payoffs to all players is equal
to the total tax which is collected from players since∑i x∗
i = 1 holds. The reallocated subsidy to each strategy is equally-divided to players with the strategy. Therefore, the subsidy which is provided to each player with a strategy i is given byαx∗i
∑j pju(ej, x)/pi = α(x∗i /xi)
∑j∈S xju(ej, x). Thus, a payoff function for the players with rate taxations and subsidies is
given by the following function:
(1− α)u(ei, x)+ αx∗ixiu(x, x). (2)
The first term of Eq. (2) is uncollected part of payoffs and the second one is collected and reallocated part of payoffs. Notethat, since we assume that all collected taxes are reallocated in this case, the average payoff of players u(x, x) is independentof the taxation rate α. Moreover, suppose that every pure strategy is adopted by some players at least in the initial state,that is, xi(0) > 0 is assumed to hold for any pure strategy i ∈ S. In other words, we assume that x(0) ∈ int(∆). By thisassumption, within any finite-time interval, xi > 0 holds for all i ∈ S and Eq. (2) is well defined. In this model, we assumethat u(ei, x) ≥ 0 holds for any i ∈ S, and there exists j ∈ S satisfying u(ej, x) > 0 for all x ∈ ∆. Under this assumption,u(x, x) > 0 holds for any x ∈ ∆. Substituting Eq. (2) for players’ payoff function u(ei, x) of Eq. (1), we have replicatordynamics with rate taxations and subsidies as the following equation: for each strategy i ∈ S,
xi = (1− α) xi {u(ei, x)− u(x, x)} + α(x∗i − xi
)u(x, x), (3)

e820 T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826
where α ∈ [0, 1] is the taxation rate. Taxation rates which canmake the target state locally or globally asymptotically stablehas been proposed in Ref. [7]. We summarize properties of the rate taxation model. By Eq. (3), obviously, if the governmentadopts the strategy non-intervention (α = 0), then Eq. (3) is reduced to Eq. (1). On the other hand, it has been proved if thegovernment adopts the strategy complete intervention (α = 1), then the target state x∗ ∈ ∆ is a globally asymptoticallystable equilibrium point. For the target state x∗, we obtain the following proposition [7]:
Proposition 1. If the target state x∗ ∈ ∆ is an equilibrium point of Eq. (1), then it is an equilibrium point of Eq. (3) for anyα ∈ [0, 1]. On the other hand, if x∗ is not an equilibrium point of Eq. (1), then there does not exist α ∈ [0, 1) such that it is anequilibrium point of Eq. (3).
Proposition 1 means if x∗ is not an equilibrium point of Eq. (1), then the government has to adopt complete intervention forleading the population state to the target state. Therefore, we consider the case that the target state is an equilibrium pointof Eq. (1).We define a subsetW ⊆ ∆, a scaled spaceUε ⊆ ∆ of∆with the scaling factor ε ∈ (0, 1] and the center x∗, and a function
α(x) of x ∈ W as follows:
W =
{x ∈ ∆
∣∣∣∣∣∑i∈S
x∗i u(ei, x) < u(x, x)
}, (4)
Uε ={x ∈ ∆
∣∣x = (1− ε)x∗ + εx, x ∈ ∆} , (5)
α(x) =
u(x, x)−∑i∈Sx∗i u(ei, x)∑
i∈Sx∗i{x∗ixiu(x, x)− u(ei, x)
} . (6)
The target state x∗ is a locally asymptotically stable equilibrium point of Eq. (3) for all α ∈ (α, 1], where α = 0 if there existsε > 0 satisfying Uε ∩W = ∅, otherwise α = supx∈Uε∩W α(x) for some ε > 0 satisfying Uε ∩W 6= ∅. Since Uε equals to ∆with ε = 1, we obtain the following theorem [7]:
Theorem 1. We set α = 0 if W = ∅ and α = supx∈W α(x) if W 6= ∅. Then, x∗ is a globally asymptotically stable equilibriumpoint of Eq. (3) for all α ∈ (α, 1].
4. Capitation taxes
4.1. Model
In this section, we deal with the capitation taxes. Different from the rate taxation, the capitation taxes are determinedindependent of the players’ payoffs. To analyze their effects on players’ behaviors, we propose replicator dynamics withcapitation taxes and subsidies. Suppose that the number of players who adopt a strategy i ∈ S is pi > 0 and the number ofall players in the population is p =
∑i pi. If the government imposes the capitation tax c on each player, then the total payoff
which is collected from players is cp. Let x∗ be a target state. Suppose that the more desirable strategy for the governmentplayers adopt, the more subsidies they are provided. Then, the subsidy which is provided to players with a strategy i isassumed to be cpx∗i . The reallocated subsidy to each strategy is equally-divided to players with the strategy. Therefore, thesubsidy which is provided to each player with a strategy i is given by cpx∗i /pi = cx
∗
i /xi. Thus, the payoff function for theplayers with subsidies and capitation taxes is given by the following function:
u(ei, x)− c + cx∗ixi= u(ei, x)− c
(1−
x∗ixi
). (7)
Similar to the model of the rate taxations, we assume that all collected taxes are reallocated and the average payoff ofplayers is independent of the capitation tax c . We assume that x(0) ∈ int(∆) and Eq. (7) is well defined within any finite-time interval. Substituting the right-hand side of Eq. (7) for players’ payoff function u(ei, x) of Eq. (1), we have replicatordynamics with subsidies and capitation taxes as follows: for each strategy i ∈ S,
xi = {u(ei, x)− u(x, x)}xi + c(x∗i − xi), (8)
where c ≥ 0 is the amount of the capitation taxes. Note that we allow the case that the tax c is greater than the players’original payoffs, that is, we allow c > u(ei, x). Eq. (8) is given by adding the negative feedback term c(x∗i − xi) to theconventional replicator dynamics equation (1), and the tax c is considered as a feedback gain.

T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826 e821
4.2. Properties
We show several properties of Eq. (8) and prove a condition for the capitation tax to make the target state locally orglobally asymptotically stable. See Appendix for proofs of propositions, theorems, and a corollary in this section.
Proposition 2 (Invariance Under a Local Shift). Eq. (8) is invariant under a local shift of the payoff matrix A, where the local shiftis the addition of a constant to all elements of a column of A.
Eq. (1) is invariant under the local shift of the payoff matrix A, but the rate taxation model proposed by [7] is changed by thelocal shift. Using the invariance under the local shift, without loss of generality, we can suppose that each element of thepayoff matrix A is non-negative. Especially, in two-strategy game, we can simplify the matrix A by setting all non-diagonalelements to zero.
Proposition 3 (Equilibrium Target Point). If the target state x∗ is an equilibrium point of Eq. (1), then it is an equilibrium pointof Eq. (8) for any tax c > 0.
Generally, it is not always true that the target state x∗ is an equilibrium point of Eq. (8). However, if the target state x∗ is anequilibrium point of Eq. (1), then x∗ is always an equilibrium point of Eq. (8). In this paper, we focus on the case that thetarget state x∗ is an equilibrium point of Eq. (1), and discuss its stability.
Theorem 2 (Locally Asymptotic Stability). Let the linearization system of Eq. (1) at the target state x = x∗ be x = J0x, and theeigenvalues of the Jacobian matrix J0 of Eq. (1) at x = x∗ be λ0i (i = 1, . . . , n). Then, the linearization system of Eq. (8) at thetarget state x = x∗ is given by
x = (J0 − cIn)x, (9)
where In is the n× n unit matrix. The origin is asymptotically stable in Eq. (9) if and only if c > maxi {R(λ0i)}, where R(λ0i) isthe real part of λ0i.
If the origin of the linearization system equation (9) is asymptotically stable, then the target state x = x∗ of the nonlinearsystem equation (8) is locally asymptotically stable. In the case that c = maxi {R(λ0i)} holds, although the origin of Eq. (9)is Lyapunov stable, the stability of x = x∗ depends on the higher-order terms of Eq. (8).
Theorem 3 (Globally Asymptotic Stability). Suppose that each element of the payoff matrix A is non-negative and define c(x) asfollows: for all x ∈ int(∆) \ {x∗},
c(x) =
n∑i=1(xi − x∗i )u(ei, x)
n∑i=1(x∗i − xi)
x∗ixi
. (10)
If the target state x∗ is a Nash equilibrium, then it is a globally asymptotically stable equilibrium point of (8) for c >max{0, supx∈int(∆)\{x∗} c(x)}. Moreover, c(x) < 2(n− 1)maxi,j aij for any x ∈ int(∆) \ {x∗}.
Due to Proposition 2, for a game with a payoff matrix Awhich has a negative element, we transform it to a payoff matrixAwhose elements are non-negative by the local shift to the matrix A and apply Theorem 3 to the matrix A. The target stateof the game with A is also stabilized globally by the tax c for the game with A.Now, we intervene a population state x as a situation that all players of the population adopt a mixed strategy x. Then,
the numerator of c(x) is a difference between a payoff of a player with a mixed strategy x and that of a player with x∗.c(x) is positive if the former is larger than the latter while it is negative if the latter is larger than the former. Since playershave no incentive to change their strategy x to x∗ if the former is larger, the achievement of the target state x∗ requires thegovernment’s intervention. The larger the difference is, the larger the tax c which can stabilize the target state x∗ is. Onthe other hand, if the latter is larger, then players are willing to change their strategy x to x∗ independent of the tax c . Thedenominator of c(x) estimates a kind of distance between a population state x and the target state x∗. Since the distanceis not a simple summation of differences between xi and x∗i but a weighted summation of the differences multiplied byx∗i /xi, the positive differences are amplified and the negative differences are discounted. So, roughly speaking, the farther apopulation state x is from the target state x∗, the larger the denominator is. To set c = 2(n− 1)maxi,j aij as a tax means thatthe government imposes the larger tax on players when the number of strategies and the maximum payoff are larger.Theorem 3 supposes that the target state x∗ is a Nash equilibrium. The target state which is not a Nash equilibriummust
be on the boundary of∆, that is, x∗ ∈ bd(∆). For such a target state, we have the following theorem:
Theorem 4. Suppose that each element of the payoff matrix A is non-negative and x∗ ∈ bd(∆). For all i 6∈ C(x∗) and for anyc > maxi6∈C(x∗)maxj∈S aij, orbits x(t) of Eq. (8) satisfy limt→∞ xi(t) = 0.

e822 T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826
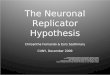
Fig. 1. Phase portrait for c = 0.
When x∗i = 0 and xi(0) = 0, the set {x ∈ ∆|xi = 0} ⊂ bd(∆) is a positive invariant set since xi(t) ≡ 0. Therefore, it isexpected thatwe can find the tax cwhichmakes the target state an attractor of Eq. (8) by the following procedure. First, usingTheorem 4, find a tax c1 which converges xi to zero for all strategies i 6∈ C(x∗). Next, for a sub-game which omits strategiesi 6∈ C(x∗), find a tax c2 which stabilizes the target state x∗ globally using Theorem 3. Finally, we set c = max{c1, c2} as atax so that the target state x∗ becomes an attractor of Eq. (8) whose basin is ∆. However, it is not obvious that the tax cwhich is given by the above procedure makes the target state x∗ ∈ bd(∆) an attractor of Eq. (8) since the orbits of Eq. (8)cannot converge to the set {x ∈ ∆|xi = 0} ⊂ bd(∆)within finite-time intervals. Even if the tax can make the target state anattractor, the target state may not be Lyapunov stable. When the target state x∗ is a vertex of∆, we can prove x∗ is not onlyan attractor but also a Lyapunov stable equilibrium point, that is, x∗ is a globally asymptotically stable equilibrium point.
Corollary 1 (Stability of the Target State on a Vertex). Suppose that the target state x∗ is a vertex of ∆. Then it is a globallyasymptotically stable equilibrium point of Eq. (8) if c > maxi∈S\{k}maxj∈S aij.
4.3. Example
Heavy traffic in urban areas cause several kinds of problems such as air pollution, increase in CO2 level, and so on. Recently,park and ride (P&R) is paid much attention to as a useful system for a traffic congestion problem. Park and ride means thatpeople who wants to go the urban areas drive their cars by a train station or a bus stop, park their cars there, and transferto a public transport system such as a train or a bus. As the other option to reduce traffic congestion, they use bicycles.In this section, suppose that the strategy 1, 2, and 3 correspond to go by ‘‘Car’’, ‘‘P&R’’, and ‘‘Bicycle’’, respectively. We set
players’ payoff matrix A as follows:
A =
[1 8 97 2 46 5 3
]. (11)
Fig. 1 shows its phase portrait. There exists a unique stable equilibrium point ◦, three unstable equilibrium points •, andthree saddle points � in Fig. 1. In the case that the government does not impose taxes, all orbits whose initial states are inint(∆) converge to the unique interior stable equilibrium point. Suppose that the government perceives the case that noone uses his/her car is the desirable population state, that is, we consider the saddle point (0, 1/4, 3/4) as the target statex∗. Consider the linearization system at the target state x∗. Note that x always satisfies x1+ x2+ x3 = 1. We can eliminate x3by substituting 1− x1 − x2 for x3. Since the eigenvalues of the Jacobian matrix at x∗ are 21/4 and−3/4, Theorem 2 showsthat the target state is a locally asymptotically stable equilibrium point if c > 21/4. Figs. 2 and 3 show transient controlledbehaviors with c = 26/5 (<21/4) and c = 53/10 (>21/4), respectively. In the case of c = 26/5, all orbits converge to aneighborhood of the target state, but do not converge to the target state itself as shown in Fig. 2. However, in the case ofc = 53/10, all orbits converge to the target state as shown in Fig. 3. Theorem 4 shows that all orbits converge to a surfacewith x1 = 0 where the target state x∗ ∈ bd(∆) is if c > 9. A two-strategy sub-gamewhich omits the strategy 1 has a uniquelocally asymptotically stable equilibrium point (x2, x3) = (1/4, 3/4) if c = 0. Theorem 3 shows that the target state isglobally stabilized if c > 0. Depicted in Fig. 4 is a phase portrait for c = 91/10, which shows that the target state is globallyasymptotically stable.
5. An application of capitation tax model to selfish routing
A selfish routing game is a simple model of selfish behaviors in networks [9,10]. Its replicator dynamics has beenproposed [11]. In such a game, there exists inefficiency caused by selfish route selections of each player and several

T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826 e823
Fig. 2. Transient behavior of x1 for c = 26/5.
Fig. 3. Transient behavior of x1 for c = 53/10.
Fig. 4. Phase portrait for c = 91/10.
methodologies have been proposed to reduce it. In this section, we consider an application of the capitation tax modelto such a selfish routing game.In selfish routing games, suppose that there is a fixed flow demand and it is routed from a source to a sink. A player’s
strategy is a selection from all possible paths from the source to the sink, and its payoff is related to latency on each path.Since the player selects a path in order to minimize the latency, the payoff of selecting a path i ∈ S is set to u(ei, x) = −li(x),where li(x) is latency of a path i with flow x ∈ ∆. We can consider the capitation tax c in our proposed model is additionalfictitious delay to flow of each path in routing games. On the other hand, we cannot introduce the subsidies into the selfishrouting since we cannot reduce latency in network by the control. Therefore, using Proposition 2, we modify our proposedpayoff function with subsidies and capitation taxes given by Eq. (7) as follows:
u(ei, x)−maxi∈S
{cx∗ixi
}+ cx∗ixi. (12)
Substituting Eq. (12) for player’s payoff function u(ei, x) of Eq. (1), we have Eq. (7). Since Eq. (12) is always less than or equalto u(ei, x) for all i ∈ S with equality if and only if x = x∗, it is well defined as players’ payoff functions in selfish routinggames.

e824 T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826
Fig. 5. Braess’ Paradox. Each edge is labeled with its latency, where xei is the amount of traffic using the edge which is labeled with it, that is, xe1 = x1+ x2and xe2 = x2 + x3 .
Fig. 6. Phase portrait for c = 0.
As a simple example, we consider a network shown in Fig. 5. Suppose that there is a fixed flow demand 1 and it is routedfrom source s to sink t . This network has three s–t paths. Let strategies 1, 2, and 3 correspond to a selection of the pathss–v–t , s–v–w–t , and s–w–t , respectively. The payoff matrix is given by latency of each edge of the network shown in Fig. 5.By a local shift of the given payoff matrix, we have the following payoff matrix whose elements are non-negative:
A =
[0 0 11 0 11 0 0
]. (13)
In this network, a Nash equilibrium flow is x = (0, 1, 0), while the minimum latency flow is (1/2, 0, 1/2). Such a situationis well known as Braess’s Paradox. We consider the minimum latency flow (1/2, 0, 1/2) as the target state.Consider the linearization system at the target state x∗. The eigenvalues of the Jacobian matrix at x∗ are 1/2 and −1/2.
Theorem 2 shows that the target state is a locally asymptotically stable equilibrium point if c > 1/2. Moreover, Theorem 4shows that all orbits converge to a surface with x2 = 0 if c > 1. A two-strategy sub-game which omits the strategy 2 has aunique locally asymptotically stable equilibrium point (x1, x3) = (1/2, 1/2) for any c ≥ 0, and Theorem 3 shows that thetarget state is globally stabilized if c > 0. Figs. 6 and 7 showphase portraits of the selfish routingwith taxes and subsidies forc = 0 and c = 11/20 (>1/2), respectively. In this example, by Theorem 2, a tax satisfying the condition c > 1/2 stabilizesthe target state globally as shown in Fig. 7. By Theorem 4, all orbits converge to a surface with x2 = 0 if a tax satisfies thecondition c > 1.
6. Conclusions
In this paper, we have proposed replicator dynamics with capitation taxes and subsidies to analyze effects of capitationtaxes on players’ behaviors. In this model, the government’s purpose is to control the population state to a target stateby collecting capitation taxes and reallocating them as subsidies depending on the target state. We have proved severalproperties of ourmodel and have provided a capitation taxwhich canmake the target state locally or globally asymptoticallystable. Moreover, we have also discussed an application of our model to selfish routing games. In our model, the amountof taxes is assumed to be independent of the population state. However, we can consider that it is changed depending onthe population state as a government’s policy. It is our future work to propose a model which can deal with such changes ofcapitation taxes.

T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826 e825
Fig. 7. Phase portrait for c = 11/20.
Acknowledgments
This research was supported in part by KAKENHI (No. 19860045) and ‘‘Global COE (Centers of Excellence) Program’’ ofthe Ministry of Education, Culture, Sports, Science and Technology, Japan.
Appendix. Proofs
A.1. Proof of Theorem 2
Let the linearization system of Eqs. (1) and (8) at the target state x = x∗ be x = J1(c)x and x = J0x, respectively. Moreover,we denote Eqs. (1) and (8) by xi = fi(x) and xi = f ′i (x), respectively. Obviously, xi = f
′
i (x) = fi(x) + c(x∗
i − xi) holds. Then,we have
J1(c) =
∂ f ′1∂x1
· · ·∂ f ′1∂xn
.... . .
...∂ f ′n∂x1
· · ·∂ f ′n∂xn
x=x∗
=
∂ f1∂x1− c · · ·
∂ f1∂xn
.... . .
...∂ fn∂x1
· · ·∂ fn∂xn− c
x=x∗
, (A.1)
that is, J1(c) = J0 − cIn. Therefore, if we suppose that the eigenvalues of J1(c) are λ11, . . . , λ1n, then λ1i = λ0i − c holds fori = 1, . . . , n. Note that λ0i is a constant which depends on the payoff matrix A and the target state x∗. Thus, the real partsof all eigenvalues of J1(c) are negative, that is, the origin of Eq. (9) is an asymptotically stable equilibrium point if and onlyif c > maxi{R(λ0i)} holds. �
A.2. Proof of Theorem 3
Consider the following function:
V (x) =∑i
x∗i >0
(−x∗i log
xix∗i
). (A.2)
This function satisfies V (x) ≥ 0 with equality if and only if x = x∗. The time derivative of V (x) along solutions of Eq. (8) is
V (x) = −∑i
(x∗i − xi)u(ei, x)−∑i
(x∗i − xi)x∗ixic. (A.3)
Then V (x) < 0 for all x 6= x∗ if
c > max
{0, supx∈int(∆)\{x∗}
(c(x))
}. (A.4)
Thus, x∗ is a globally asymptotically stable equilibrium point.

e826 T. Kanazawa et al. / Nonlinear Analysis 71 (2009) e818–e826
We will prove that 2(n − 1)maxi,j(aij) is an upper bound of c(x). Let δ = (δ1, . . . , δn) be a difference between x andx∗, that is, δi = xki − x
∗
kifor i = 1, . . . , n. Without loss of generality, we assume that δi > 0 for i = 1, . . . , np, δi < 0 for
i = np + 1, . . . , np + nm, and δi = 0 for i = np + nm + 1, . . . , n. Then, we have
c(x) = −
∑iδiu(eki , x
∗+ δ)
∑iδix∗kixki
. (A.5)
For the numerator of the right-hand side of Eq. (A.5), we have the following inequality:
n∑i=1
δiu(eki , x∗+ δ) ≤ 2a
(np∑i=1
δi
)2(A.6)
where a = maxi,j aij. For the denominator of the right-hand side of Eq. (A.5), we have the following inequality:
n∑i=1
δix∗kixki
< −
np∑i=1
(δ2i ). (A.7)
Thus, we have
c(x) < 2a
( np∑i=1δi
)2np∑i=1(δ2i )
. (A.8)
Moreover, since a > 0 and∑npi=1(δ
2i ) > 0, we have
2anp − 2a
( np∑i=1δi
)2np∑i=1(δ2i )
=2a
np∑i=1(δ2i )
npnp∑i=1
(δ2i )−
(np∑i=1
δi
)2 ≥ 0. (A.9)
Thus, 2a(n− 1) ≥ 2anp ≥ 2a(∑npi=1 δi)
2/∑npi=1(δ
2i ) > c(x) holds, and 2(n− 1)maxi,j(aij) is an upper bound of c(x). �
A.3. Proof of Theorem 4
Let x∗ be a target state. Suppose that x∗i = 0, where x∗
i is the ith element of x∗. In this case, the dynamics of xi is given by
xi = {u(ei, x) − u(x, x) − c}xi. Therefore, if c > u(ei, x) for all x ∈ ∆, that is, if c > maxj aij, then xi(t) with xi(0) ∈ (0, 1]decreases and converges to x∗i = 0 as t →∞. �
A.4. Proof of Corollary 1
Theorem 4 shows that the target state is a global attractor. Moreover, the proof of Theorem 4 implies that xi decreasesmonotonically for all strategies i 6∈ C(x∗) and xj increases monotonically for the strategy i ∈ C(x∗). Therefore, the targetstate is Lyapunov stable since the∞-norm of x− x∗ for any initial state x(0) ∈ ∆ decreases monotonically as time elapses.Thus, the target state is a globally asymptotically stable equilibrium point of Eq. (8) for any tax c > maxi∈S\{k}maxj∈S aij. �
References
[1] R.M. Dawes, Social dilemmas, Annual Review of Psychology 31 (1980) 169–193.[2] C. Hauert, Spatial effects in social dilemmas, Journal of Theoretical Biology 240 (4) (2006) 627–636.[3] J. Tanimoto, H. Sagara, Relationship between dilemma occurrence and the existence of a weakly dominant strategy in a two-player symmetric game,Biosystems 90 (1) (2007) 105–114.
[4] H. Ohtsuki, M.A. Nowak, The replicator equation on graphs, Journal of Theoretical Biology 243 (1) (2006) 86–97.[5] J.M. Pacheco, A. Traulsena, M.A. Nowak, Active linking in evolutionary games, Journal of Theoretical Biology 243 (3) (2006) 437–443.[6] N.G. Mankiw, Principles of Economics, 4th ed., Thomson South-Western, Mason, 2007.[7] T. Kanazawa, T. Ushio, H. Goto, Replicator dynamics with government’s intervention by collection and reallocation of payoffs, IEICE Transactions onFundamentals of Electronics, Communications and Computer Sciences E90-A (10) (2007) 2170–2177.
[8] J.W. Weibull, Evolutionary Game Theory, MIT Press, Cambridge, 1995.[9] T. Roughgarden, Selfish Routing and the Price of Anarchy, MIT Press, 2005.[10] T. Roughgarden, Routing games, in: N. Nisan, T. Roughgarden, É Tardos, V.V. Vazirani (Eds.), Algorithmic Game Theory, Cambridge University Press,
2007, pp. 461–486. Ch. 18.[11] S Fischer, B Vöcking, On the evolution of selfish routing. In: Proceedings of the 12th European Symposium on Algorithms. 2004. p. 323–334.