Embed Size (px)
Citation preview
Reminder of probability
Lecturer: Dmitri A. Moltchanov
E-mail: [email protected]
http://www.cs.tut.fi/kurssit/ELT-53606/
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
OUTLINE:
• Outcomes and events;
• Definitions of probability;
• Probability algebra;
• Random variables;
• Jointly distributed random variables;
• Memoryless property of exponential and geometric distributions;
• Important distributions.
Lecture: Reminder of probability 2
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
1. Outcomes and events
1.1. Outcomes of the experiment
Assume the following:
• we are given an experiment;
• outcomes are random;
• example: we are rolling a die.
Rolling a die:
• there are six possible outcomes: 6,5,4,3,2,1;
• the number which we get is outcome of the experiment.
A set of possible outcomes is called a sample space and denoted as:
Ω = 1, 2, 3, 4, 5, 6 (1)
Note: sample space includes all simple results of the experiment.
Lecture: Reminder of probability 3
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
1.2. Events
What is the event:
• mathematically: event is a subset of set Ω;
• closer to practice: the set of outcomes of the experiment;
• well known: phenomenon occurring randomly as a results of the experiment.
Difference between outcomes and events:
• outcomes: are given by the experiment itself;
• events: we can define events;
• simplest case: events and outcomes are the same.
Assume we have rolled a die:
• set of outcomes is:
Ω = 1, 2, 3, 4, 5, 6 (2)
Lecture: Reminder of probability 4
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Let us define the following events:
• event A1 consisting in that we got 4 points:
A1 = 4, (3)
– this events is the same as outcome 4 of the experiment.
• event A2 consisting in that we got not less than 4 points:
A2 = 4, 5, 6, (4)
– this event is different compared to outcomes.
• event A3 consisting in that we got less than 3 points:
A3 = 1, 2, (5)
– this event is different compared to outcomes.
Notes:
• using the notion of outcomes we can define events;
• usually events and outcomes are different.
Lecture: Reminder of probability 5
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
1.3. Frequency-based computation of probability
Assume the following:
• we are given a fair die;
• meaning that we get one of the outcomes from subset Ω is 1/6.
Compute probabilities of events:
• event A1 consisting in that we got 4 points:
PrA1 =1
6. (6)
• event A2 consisting in that we got not less than 4 points:
PrA2 =1
6+
1
6+
1
6=
1
2, (7)
• event A3 consisting in that we got less than 3 points:
PrA3 =1
6+
1
6=
1
3. (8)
Note: if we know probabilities of outcomes we can estimate probabilities of events.
Lecture: Reminder of probability 6
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
1.4. Operations with events
Why we need it when events can be defined in terms of outcomes:
• we can also define events in terms of other events using set theory.
Let A and B be two sets of outcomes defining events:
• union of A and B is the following set:
A ∪B = x ∈ A OR x ∈ B. (9)
• intersection of A and B is the following set:
A ∩B = x ∈ A AND x ∈ B. (10)
• difference between A and B is the following set:
A\B = x ∈ A AND x 6= B. (11)
• complement of A is the set:
A = x ∈ Ω AND x 6= A. (12)
Lecture: Reminder of probability 7
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
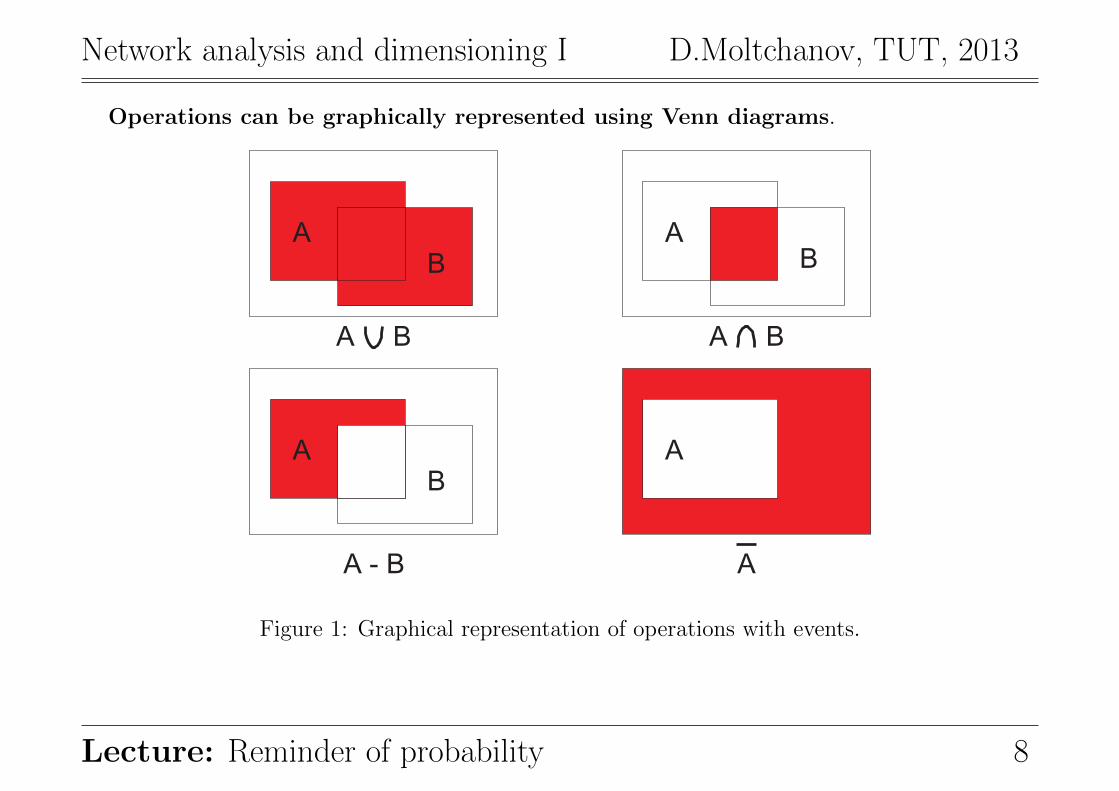
Operations can be graphically represented using Venn diagrams.
A
B
A
B
AA
B
A - B A
A B A B
Figure 1: Graphical representation of operations with events.
Lecture: Reminder of probability 8
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
1.5. Events using set theory
Why we need to use set theory:
• set theory provide a natural way to describe events.
Define the following:
• Ω is a set of all outcomes associated with an experiment:
– also called sample space;
– for a die the sample space is given by:
Ω = 1, 2, 3, 4, 5, 6. (13)
• F is a set of subsets (σ-algebra) of Ω called events, such that:
– 0 ∈ F and Ω ∈ F ;
– if A ∈ F then the complementary set A ∈ F ;
– if An ∈ F , n = 1, 2, . . . , then⋃∞n=1An ∈ F .
– 2, 3, 5, 7, A1 = 2, A2 = 5: F = ∅, 2, 5, 3, 5, 7, 2, 3, 7, 2, 5, 3, 7,Ω.
Lecture: Reminder of probability 9
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
2. Definitions of probability2.1. Classic definition
Assume we have experiment E generating a set of events F such that:
• events are mutually exclusive: when one occurs, others do not occur!
• events generate a full group:⋃ni=1Ai = Ω!
• events occur with equal chances: PrA1 = PrA2 = PrAn!
Note: these events can be just outcomes.
Definition: outcome w favors event A, if w leads to A.
Definition: probability of A:
• ratio of the number of outcomes favoring A to all number of outcomes.
Example: rolling a die, events A consists in getting even number:
• number of outcomes favoring A: m = 3; all number of outcomes: n = 6;
• probability of A: PrA = 3/6 = 1/2.
Lecture: Reminder of probability 10
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Properties of classic definition:
• assume we have n outcomes;
• all outcomes favor event Ω (m = n): PrΩ = 1;
• for any event out of F we have: 0 ≤ PrA ≤ 1, (0 ≤ m ≤ 1);
• for complimentary event A, we have:
PrA =n−mn
= 1− m
n= 1− PrA. (14)
• sum of exclusive events A1 and A2:
PrA1 + A2 =m1 +m2
n=m1
n+m2
n= PrA1+ PrA2. (15)
n outcomes
m1 favors A1 m2 favors A2
Lecture: Reminder of probability 11
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
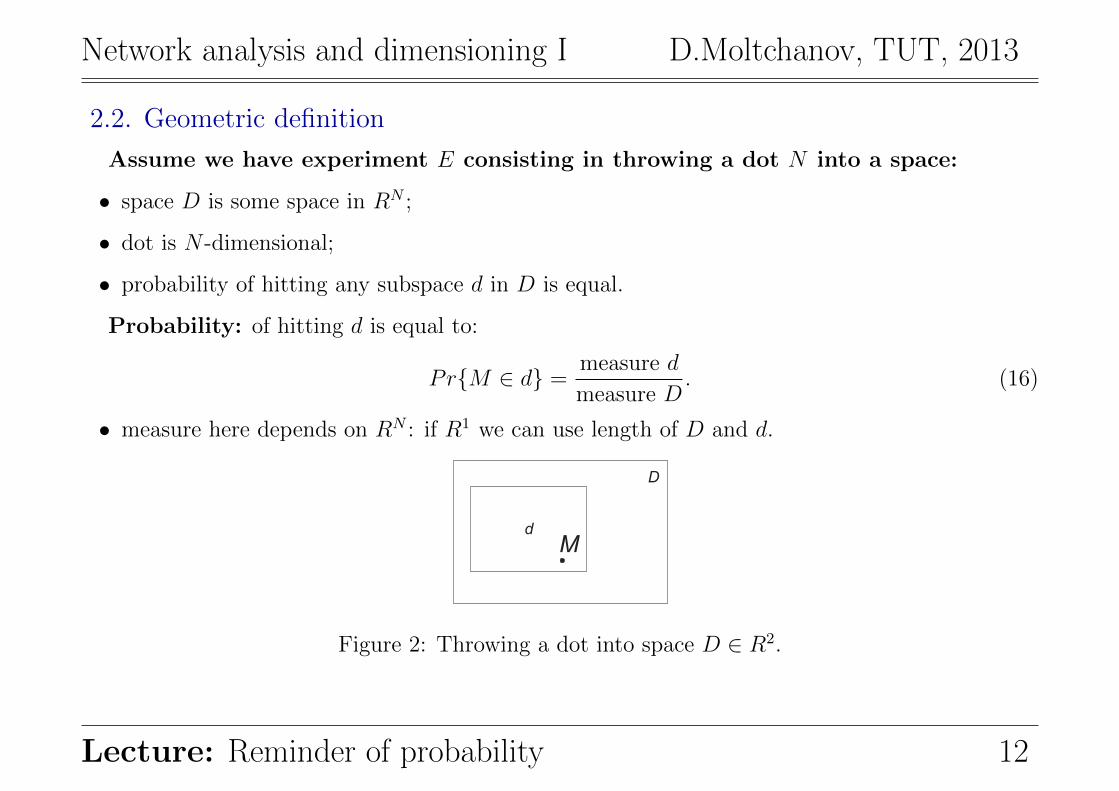
2.2. Geometric definition
Assume we have experiment E consisting in throwing a dot N into a space:
• space D is some space in RN ;
• dot is N -dimensional;
• probability of hitting any subspace d in D is equal.
Probability: of hitting d is equal to:
PrM ∈ d =measure d
measure D. (16)
• measure here depends on RN : if R1 we can use length of D and d.
D
d
M
Figure 2: Throwing a dot into space D ∈ R2.
Lecture: Reminder of probability 12
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
2.3. Statistical definition
Why we need one more definition:
• classic and geometric definition have limited applicability;
• reason: it is not often possible to determine equally probable events.
Statistical definition:
• is known for centuries;
• stated by J. Bernoulli in his last work (1713);
• applicable to wide range of events: events with stable relative frequency.
Relative frequency of event A:
Pr?A = µ/n, (17)
• µ: number of experiments in which we observed A;
• n: whole number of experiments.
Lecture: Reminder of probability 13
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Definition: probability of event A is the value to which P ?A converges when n→∞.
PrA n→∞= Pr?A = µ/n. (18)
Note:
• statistical definition have the same properties as classic one;
• the only method to compute approximate probabilities if the experiment is not classic.
If outcomes are equally likely to occur we can use two methods:
• classic computation using PrA = m/n;
• using relative frequency: PrA n→∞= Pr?A = µ/n.
Buffon and Pearson compared number of heads in coin tossing:
n = 4040, m/n = 0.5, µ/n = 0.5080,
n = 12000, m/n = 0.5, µ/n = 0.5016,
n = 24000, m/n = 0.5, µ/n = 0.5005.
(19)
Lecture: Reminder of probability 14
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
2.4. Axiomatic definition
Some facts:
• the most accepted definition;
• includes classic, geometric and statistical as special cases;
• introduced by A.N. Kolmogorov in 1933.
Let Ω be the set of outcomes, F be σ-algebra:
• P is a probability measure on (Ω, F ) such that:
– axiom 1: PA ≥ 0;
– axiom 2: PrΩ = 1;
– axiom 3: Pr0 = 0;
– axiom 4: Pr∑
k Ak =∑
k PrAk for mutually exclusive events..
Note: P is the a mapping from F in [0, 1].
Definition: (Ω, F, P ) is called the probability space.
Lecture: Reminder of probability 15
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
3. Probability algebra
3.1. Adding events
For mutually exclusive events:
Pr
∑k
Ak
=∑k
PrAk. (20)
• holds only when events are exclusive!!!
For two arbitrary events:
PrA+B = PrA+ PrB − PrAB. (21)
For three arbitrary events:
PrA+B + C = PrA+ PrB − PrAB − PrBC − PrAC − PrABC. (22)
Note: one can extend it to n events.
Lecture: Reminder of probability 16
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
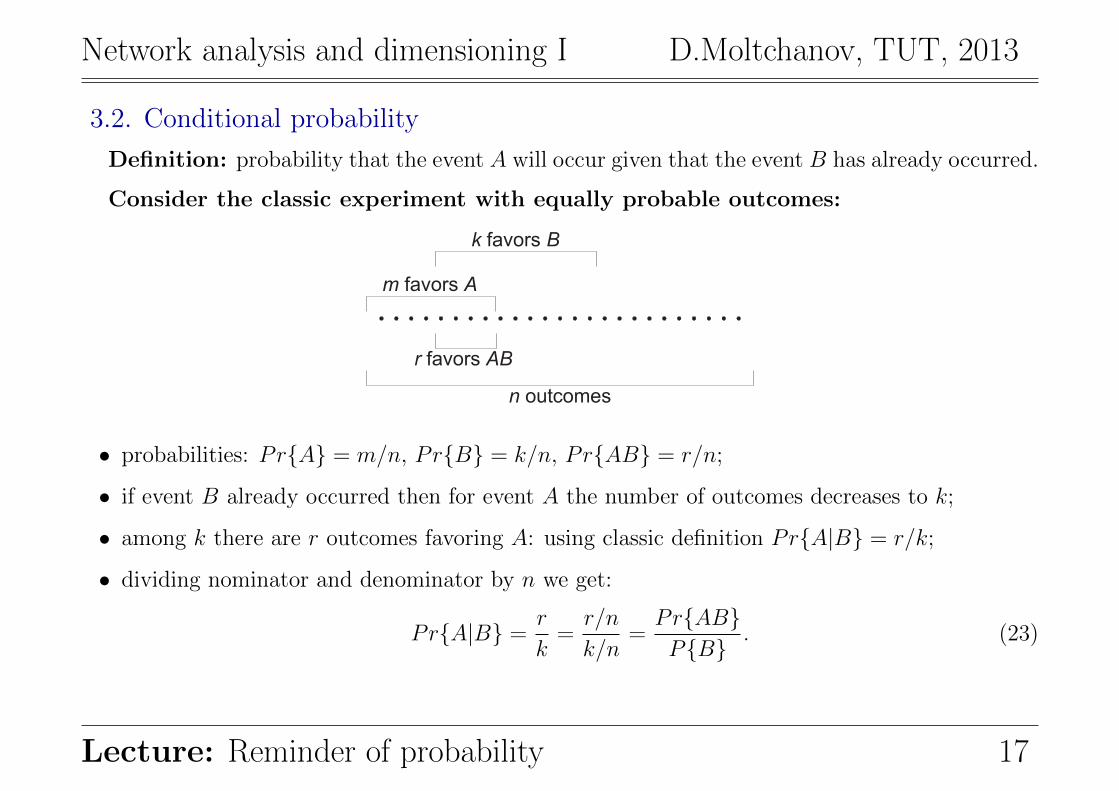
3.2. Conditional probability
Definition: probability that the event A will occur given that the event B has already occurred.
Consider the classic experiment with equally probable outcomes:
n outcomes
m favors A
k favors B
r favors AB
• probabilities: PrA = m/n, PrB = k/n, PrAB = r/n;
• if event B already occurred then for event A the number of outcomes decreases to k;
• among k there are r outcomes favoring A: using classic definition PrA|B = r/k;
• dividing nominator and denominator by n we get:
PrA|B =r
k=r/n
k/n=PrABPB
. (23)
Lecture: Reminder of probability 17
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Result:
PrA|B =PrABPB
. (24)
Note the following:
• one can check that P·|B is a probability measure;
• the conditional probability is not defined if PB = 0.
We can change the role of A and B:
P (B|A) =PABPA
. (25)
Example: there are three trunks:
• we seize the trunk with probability 1/3;
• what is the probability to seize a given trunk in two attempts?
• let: A: we seize the trunk in first attempt, B: we seize the trunk in second attempt:
PrA+ PrB − PrAB = 1/3 + 1/3− 1/9 = 5/9. (26)
Lecture: Reminder of probability 18
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
3.3. Multiplication of events
Multiplication of two arbitrary events:
PrAB = PrBPrA|B = PrAPrB|A (27)
Multiplication of n arbitrary events:
PrA1A2 . . . An = PrA1PrA2|A1PrA3|A1A2 . . . P rAn|A1 . . . An−1. (28)
Multiplication of independent events:
PrA1A2 . . . An =n∏i=1
PrAi. (29)
Question:
• which events are dependent/independent?
Lecture: Reminder of probability 19
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
3.4. Independent and dependent events
Definition: event A is independent of event B is the following holds:
PrA|B = PrA. (30)
• if one happens, it doesn’t affect the other one happening or not.
Examples:
• independent: getting tail/head tossing a coin;
• dependent: getting white ball out of the basket with red and white ones.
Note: if A is independent of B then B is independent of A.
Multiplication: if events A and B are independent then their product:
PrAB = PrBPrA|B = PrAPrB. (31)
Note: PrAB = PrAPrB is sufficient for events to be independent.
Lecture: Reminder of probability 20
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
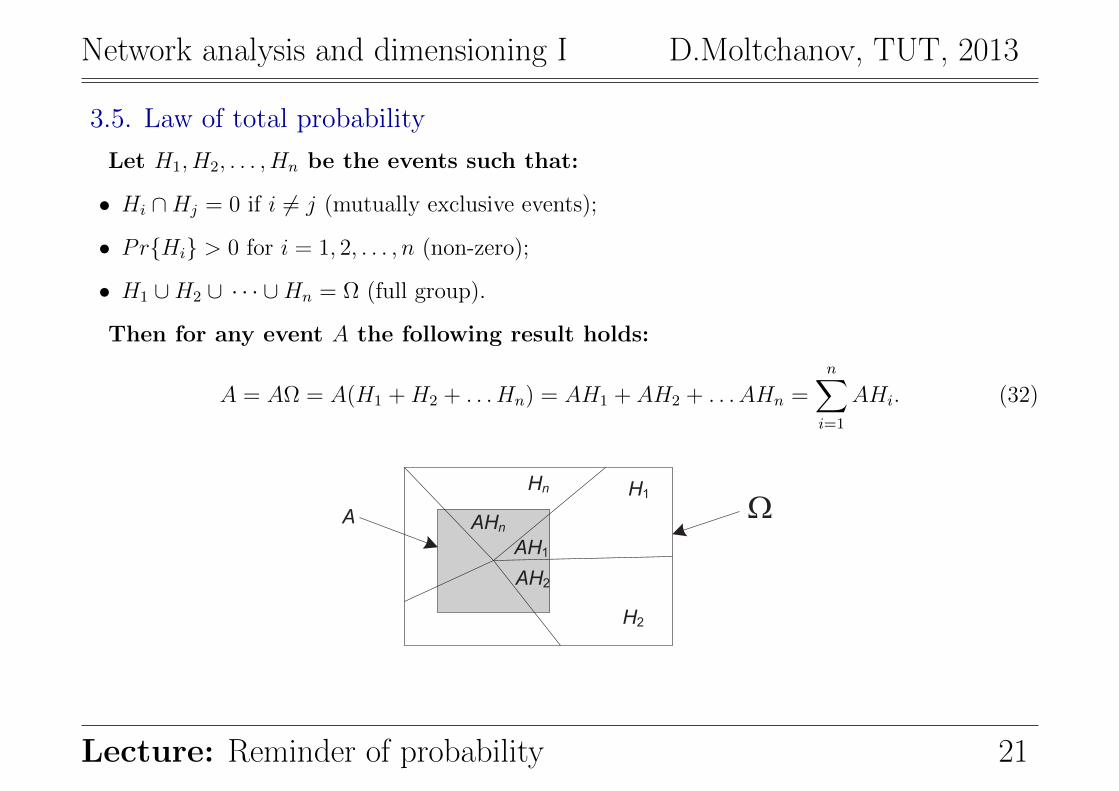
3.5. Law of total probability
Let H1, H2, . . . , Hn be the events such that:
• Hi ∩Hj = 0 if i 6= j (mutually exclusive events);
• PrHi > 0 for i = 1, 2, . . . , n (non-zero);
• H1 ∪H2 ∪ · · · ∪Hn = Ω (full group).
Then for any event A the following result holds:
A = AΩ = A(H1 +H2 + . . . Hn) = AH1 + AH2 + . . . AHn =n∑i=1
AHi. (32)
H1
H2
Hn
AH1
AH2
AHnA W
Lecture: Reminder of probability 21
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
We have:
PrA = Pr
n∑i=1
AHi
=
n∑i=1
PrAHi =n∑i=1
PrHiPrA|Hi. (33)
Law of total probability:
PA =n∑i=1
PA|HiPHi. (34)
Notes:
• events Hi, i = 1, 2, . . . , n are called hypotheses;
• probabilities PrH1, P rH2, . . . , P rHn are called apriori probabilities.
Law of total probability helps to find probability of event A is we know:
• probabilities of hypotheses Hi, i = 1, 2, . . . , n;
• probabilities PA|Hi.
Lecture: Reminder of probability 22
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Example: similar components are made by 3 vendors, we have:
• vendor 1: 50% of components: probability of non-conformance is 0.002;
• vendor 2: 30% of components: probability of non-conformance is 0.004;
• vendor 3: 20% of components: probability of non-conformance is 0.005.
Question: if we take 1 component what is the probability that it is non-conformant.
• Hk the chosen detail is made by vendor k = 1, 2, 3;
PrH1 = 0.5, P rA|H1 = 0.002,
P rH2 = 0.3, P rA|H2 = 0.004,
P rH3 = 0.2, P rA|H3 = 0.005. (35)
• A: the chosen component is non-conformant.
Using the law of total probability:
PrA = PrH1PrA|H1+ PrH2PrA|H2+ PrH3PrA|H3 = 0.0032. (36)
Lecture: Reminder of probability 23
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
3.6. Bayes’ formula
Assume: we carried out experiment and event A occurred:
• we have to re-evaluate probabilities of hypotheses: PrH1, P rH2, . . . , P rHn;
• we are looking for PrH1|A, P rH2|A, . . . , P rHn|A.
Use formula for conditional probability PrA|B = PrAB/PB get:
PrHk|A =PrAHkPrA
=PrHkPrA|Hk
PrA. (37)
Use law of total probability PA =∑n
i=1 PA|HiPHi to get:
PrHk|A =PrHkPrA|Hk∑ni=1 PrHiPrA|Hi
, k = 1, 2, . . . , n. (38)
• this formula is known as Bayes’s formula.
Note: Probabilities PrH1|A, P rH2|A, . . . , P rHn|A are called aposteriori probability.
Lecture: Reminder of probability 24
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Example: similar components are made by 3 vendors, we get
• vendor 1: 50% probability of non-conformance is 0.002;
• vendor 2: 30% probability of non-conformance is 0.004;
• vendor 3: 20% probability of non-conformance is 0.005;
• if we take 1 component, the probability that it is non-conformant:
PrA = PrH1PrA|H1+ PrH2PrA|H2+ PrH3PrA|H3 = 0.0032. (39)
Question: we took 1 component and it is non-conformant, which vendor to blame?
PrH1|A =PrH1PrA|H1
PrA= 5/16,
P rH2|A =PrH2PrA|H2
PrA= 6/16,
P rH3|A =PrH3PrA|H3
PrA= 5/16. (40)
Answer: most probably vendor 2.
Lecture: Reminder of probability 25
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4. Random variablesBasic notes:
• events: sets of outcomes of the experiment;
• in many experiments we are interested in some number associated with the experiment:
• random variable: function which associates a number with experiment.
Examples:
• number of voice calls N that exists at the switch at time t:
– random variable which takes on integer values in (0, 1, . . . ,∞).
• service time ts of voice call at the switch:
– random variable which takes on any real value (0,∞).
Classification based on the nature of RV:
• continuous: R ∈ (−∞,∞);
• discrete: N ∈ 0, 1, . . . , Z ∈ . . . ,−1, 0, 1, . . . .
Lecture: Reminder of probability 25
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.1. Special note
Random experiment:
• sample space: Ω;
• simple outcomes: ωi ∈ Ω, i = 1, 2, . . . ,M ;
• events we define: Ai, i = 1, 2, . . . , N ;
• σ-algebra: F , Ai ∈ F closed for complementarily nd union of Ai.
Question: where are these random numbers (variables) come from?
They appear:
• naturally: dice - Ω = 1, 2, 3, 4, 5, 6, X(ωi) = ωi;
• artificially: state is associated with a number X(ωi) = xi.
General formula: random variable X(ωi) = xi.
Lecture: Reminder of probability 26
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
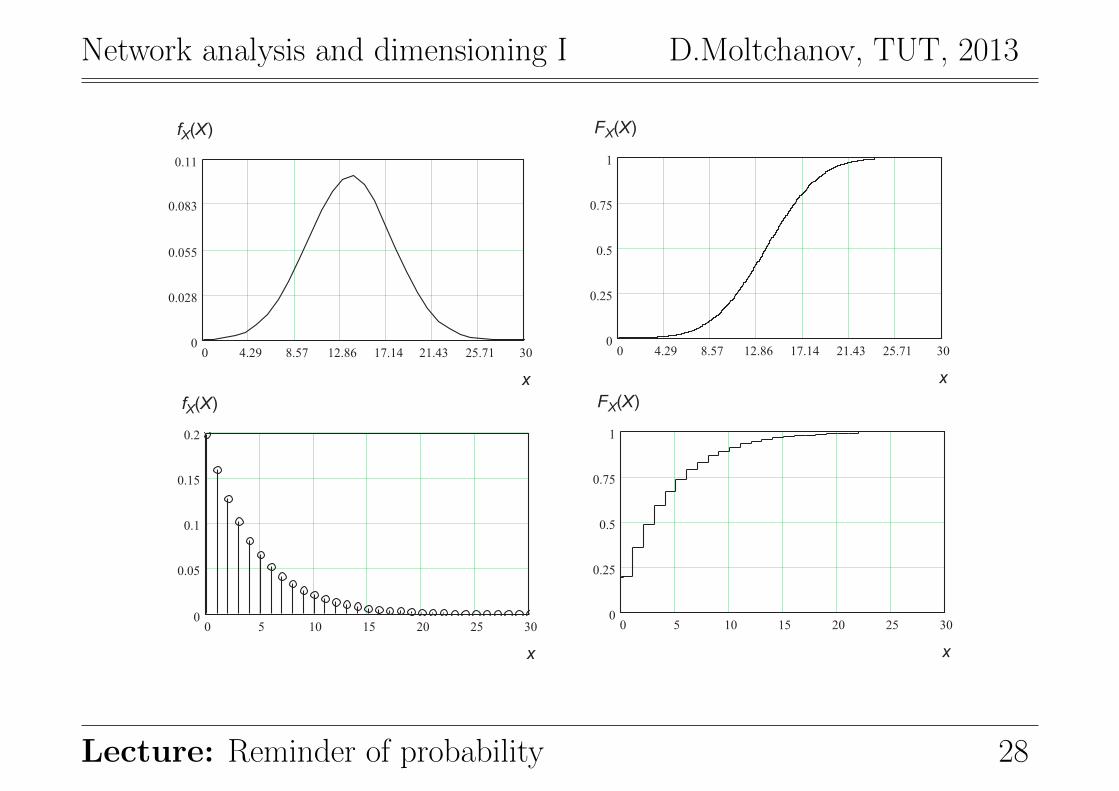
4.2. CDF, CCDF, pdf, and pmf
Definition: the probability that a random variable X is not greater than x:
F (x) = PrX ≤ x. (41)
• is called cumulative distribution function (CDF) of X.
Definition: complementary cumulative distribution function (CCDF) of RV X is:
FC(x) = PrX > x = 1− F (x). (42)
Definition: if X is a continuous RV, and F (x) is differentiable, then:
f(x) =dF (x)
dx, (43)
• is called probability density function (pdf).
Definition: if X is a discrete RV, then:
pj = PrX = j, (44)
• is called probability mass function (pmf) or probability function (PF).
Lecture: Reminder of probability 27
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
fX(X)
0 4.29 8.57 12.86 17.14 21.43 25.71 300
0.028
0.055
0.083
0.11
x
FX(X)
0 4.29 8.57 12.86 17.14 21.43 25.71 300
0.25
0.5
0.75
1
x
fX(X)
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
x
FX(X)
0 5 10 15 20 25 300
0.25
0.5
0.75
1
x
Lecture: Reminder of probability 28
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.3. Properties of CDF
For CDF the following properties holds:
• CDF F (x) is monotone and non-decreasing with:
F (−∞) = 0, F (∞) = 1, 0 ≤ F (x) ≤ 1. (45)
• for any a < b:
Pra < X ≤ b = F (b)− F (a). (46)
• right continuity: if F (x) is discontinuous at x = a, then:
F (a) = F (a− 0) + PrX = a. (47)
• depending on whether X is discrete or continuous:
F (x) =∑j≤x
PrX = j, F (x) =
∫ x
−∞f(y)dy. (48)
Note: if X is discrete RV it is often preferable to deal with pmf instead of CDF.
Lecture: Reminder of probability 29
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.4. Properties of pdf
For pdf of continuous RV the following properties holds:
• pdf f(x) non-negative:
f(x) ≥ 0, x ∈ (−∞,∞). (49)
• if f(x) is integrable then for any a < b:
Pra < X ≤ b = F (b)− F (a) =
∫ b
a
f(x)dx. (50)
• integrity: ∫ ∞−∞
f(x)dx = 1. (51)
Note: all these properties hold for pmf (you have to replace integral by sum).
Lecture: Reminder of probability 30
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.5. Parameters of RV
Basic notes:
• continuous RV: CDF and pdf give all information regarding properties of RV;
• discrete RV: CDF and pmf (PF) give all information regarding properties of RV.
Why we need something else:
• problem 1: CDF, pdf and pmf are sometimes not easy to deal with;
• problem 2: sometimes it is hard to estimate from data;
• solution: use parameters of RV.
What parameters:
• mean;
• variance;
• skewness;
• excess (sometimes called excess kurtosis), etc.
Lecture: Reminder of probability 31
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.6. Mean
Definition: the mean of RV X is given by:
E[X] =∑∀i
xipi, E[X] =
∫ ∞−∞
xf(x)dx. (52)
• mean E[X] of RV X is between max and min value of non-complex RV:
minkxk ≤ E[X] ≤ max
kxk. (53)
• mean of the constant is constant:
E[c] = c. (54)
• mean of RV multiplied by constant value is constant value multiplied by the mean:
E[cX] = cE[X]. (55)
• mean of constant and RV X is the mean of X and constant value:
E[c+X] = c+ E[X]. (56)
Lecture: Reminder of probability 32
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.7. Variance and standard deviation
Definition: the mean of the square of difference between RV X and its mean E[X]:
D[X] = E[(X − E[X])2]. (57)
How to compute variance:
• assume that X is discrete, compute variance as:
D[X] =∑∀n
(xn − E[X])2pn, (58)
• assume that X is continuous, compute variance as:
D[X] =
∫ ∞−∞
(x− E[X])2f(x)dx, (59)
• the another approach to compute variance:
D[X] = E[X2]− (E[X])2. (60)
Lecture: Reminder of probability 33
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Properties of the variance:
• the variance of the constant value is 0:
D[c] = E[(c− c)2] = E[0] = 0. (61)
• variance of RV multiplied by constant value:
D[cX] = E[(cX − cE[X])2] = E[c2(X − E[X])2] = c2D[X]. (62)
• variance of the constant value and RV X:
D[c+X] = E[((c+X)− (x+ E[X]))2] = E[(X − E[X])2] = D[X]. (63)
Definition: the standard deviation of RV X is given by:
σ[X] =√D[X]. (64)
Note: standard deviation is dimensionless parameter.
Lecture: Reminder of probability 34
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.8. Other parameters: moments
Let us assume the following:
• X be RV (discrete or continuous);
• k ∈ 1, 2, . . . be the natural number;
• Y = Xk, Z = E[(X − E[X])k], k = 1, 2, . . . , be the set of random variables.
Assuming that X is continuous introduce the following functions:
• assume X is a discrete RV:
E[Xk] = E[Y ] =
∫ ∞−∞
xkfX(x)dx, (65)
– note: mean is obtained by setting k = 1.
• assume X is a continuous one.
E[(X − E[X])k] = E[Z] =
∫ ∞−∞
(x− E[X])kfX(x)dx, (66)
– note: variance is obtained by setting k = 2.
Lecture: Reminder of probability 35
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Definition: moment of order k of RV X is the mean of RV X in power of k:
αk = E[Xk]. (67)
Definition: central moment of order k of RV X is given by:
µk = E[(X − E[X])k]. (68)
One can note that:
E[X] = α1, D[X] = σ[X] = µ2 = α2 − α21. (69)
Definition: skewness of RV is given by:
sX =µ3
(σ[X])3. (70)
Definition: excess of RV is given by:
eX =µ3
(σ[X])4. (71)
Lecture: Reminder of probability 36
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
4.9. Meaning of moments
Parameters meanings:
• measures of central tendency:
– mean: E[X] =∑∀i xipi;
– mode: value corresponding to the highest probability;
– median: value that equally separates weights of the distribution.
• measures of variability:
– variance: D[X] = E[(X − E[X])2];
– standard deviation:√D[X];
– squared coefficient of variation: k2X = D[X]/(E[X])2.
• other measures:
– skewness of distribution: skewness;
– excess of the mode: excess.
Note: not all parameters exist for a given distribution!
Lecture: Reminder of probability 37
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Lecture: Reminder of probability 38
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5. Jointly distributed RVsBasic notes:
• sometimes it is interesting to investigate two or more RVs;
• we assume that RVs X and Y are defined on some probability space.
Definition: joint cumulative distribution function (JCDF) of RVs X and Y is:
FXY (x, y) = PrX ≤ x, Y ≤ y. (72)
• for continuous RV.
Let us define:
FX(x) = PrX ≤ x, FY (y) = PrY ≤ y, x, y ∈ R, (73)
• FX(x) and FY (y) are called marginal CDFs.
Marginal CDF can be derived form JCDF:
FX(x) = limy→∞
F (x, y) = F (x,∞), FY (y) = limx→∞
F (x, y) = F (∞, y). (74)
Lecture: Reminder of probability 39
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Definition: if F (x, y) is differentiable then the following function:
fXY (x, y) =d2
dxdyFXY (x, y) = Prx ≤ X ≤ x+ dx, y ≤ Y ≤ y + dy, (75)
• is called joint probability density function (jpdf).
Assume then that X and Y are discrete RVs.
Definition: joint probability mass function (jmpf) of discrete RVs X and Y is:
FXY (x, y) = PrX = x, Y = x. (76)
Let us define:
FX(x) = PrX = x, FY (y) = PrY = y. (77)
• these functions are called marginal probability mass functions (mpmfs).
Marginal pmfs can be derived from jmpf:
FX(x) =∑∀y
FXY (x, y), FY (y) =∑∀x
FXY (x, y). (78)
Lecture: Reminder of probability 40
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5.1. Dependence and independence of RVs
Definition: if continuous RVs X and Y are independent then:
FXY (x, y) = FX(x)FY (y). (79)
• FX(x, y) is the JCDF;
• FX(x) and FY (y) are CDFs of RV X and Y .
Definition: if discrete RVs X and Y are independent then:
fXY (x, y) = fX(x)fY (y). (80)
• fXY (x, y) is the jpdf;
• fX(x) and fY (y) are pdfs of RV X and Y .
Definition: it is necessary and sufficient for two discrete RVs X and Y to be independent:
FXY (x, y) = FXY (X = x, Y = ∀)FXY (X = ∀, Y = y). (81)
• FX(x, y) is the jpmf;
• FX(x) and FY (y) are pmfs of RV X and Y .
Lecture: Reminder of probability 41
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5.2. Conditional distributions: measure of dependence
Definition: the following expression:
PrX|Y x|y = FX|Y (x|y) =PrX = ∀, Y = y
PrY = y, (82)
• gives conditional PF of discrete RV X given that Y = y.
Definition: the following expression:
fX|Y (x, y) =fXY (x, y)
fY (y), (83)
• gives conditional pdf of continuous RV X given that Y = y.
Conditional mean of RV X given Y = y from the following expression:
E[X|Y = y] =
∫ ∞−∞
xfX|Y (x|y)dx,
E[X|Y = y] =∑∀i
xiPrX|Y x, y. (84)
Note: not convenient to deal with as the metric is different for different (X, Y ).
Lecture: Reminder of probability 42
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5.3. Measure of dependence
Sometimes RVs are not independent:
• as a measure of dependence correlation moment (covariance) is used.
Definition: covariance of two RVs X and Y is defined as follows:
KXY = cov(X, Y ) = E[(X − E[X])(Y − E[Y ])]. (85)
• where from definition that KXY = KY X .
One can find the covariance using the following formulas:
• assume that RV X and Y are discrete:
KXY =∑i
∑j
(xi − E[X])(yj − E[Y ])PrX = xi, Y = yj,
(86)
• assume that RV X and Y are continuous:
KXY =
∫ ∞−∞
∫ ∞−∞
(xi − E[X])(yj − E[Y ])fXY (x, y)dxdy. (87)
Lecture: Reminder of probability 43
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
It is often easy to use to following expression:
KXY = E[XY ]− E[X]E[Y ]. (88)
Problem with covariance: can be arbitrary in (−∞,∞):
• problem: hard to compare dependence between different pair of RVs;
• solution: use correlation coefficient to measure the dependence between RVs.
Definition: correlation coefficient of RVs X and Y is defined as follows:
ρXY =KXY
σ[X]σ[Y ]. (89)
• −1 ≤ ρXY ≤ 1;
• if ρXY 6= 0 then RVs X and Y are dependent;
• assume we are given RVs X and Y such that Y = aX + b:
ρXY = +1, a > 0,
ρXY = −1, a < 0. (90)
Lecture: Reminder of probability 44
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
Very important note:
• ρXY is the measure telling how close the dependence to linear.
Question: what conclusions can be made when ρXY = 0?
• RVs X and Y are not LINEARLY dependent;
• when ρXY = 0 is does not mean that they are independent.
independent RV dependent RV
uncorrelated RV correlated R
Figure 3: Independent and uncorrelated RVs.
What ρXY says to us:
• ρ 6= 0: two RVs are dependent;
• ρXY = 0: one can suggest that two RVs CAN BE independent;
• ρXY = 1 or ρXY = −1: RVs X and Y are linearly dependent.
Lecture: Reminder of probability 45
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5.4. Sum and product of correlated RVs
Mean:
• the mean of the product of two correlated RVs:
E[XY ] = E[X]E[Y ] +KXY . (91)
• the mean of the product of two uncorrelated RVs:
E[XY ] = E[X]E[Y ]. (92)
Variance:
• the variance of the sum of two correlated RVs:
D[X + Y ] = D[X] +D[Y ] + 2KXY . (93)
• the variance of the sum of two uncorrelated RVs:
D[X + Y ] = D[X] +D[Y ]. (94)
Lecture: Reminder of probability 46
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
5.5. pdf and pmf of the sum of arbitrary RVs
Basic note:
• pdf of the sum of two independent RVs can be obtained using convolution operation.
We consider independent RVs X and Y with pmfs:
mX(x) = PrX = x, mY (y) = PrY = y. (95)
pmf of RV Z, Z = X + Y is defined as follows:
PrZ = z =∞∑
k=−∞
PrX = kPrY = z − k. (96)
• if X = k, then, Z take on z (Z = z) if and only if Y = z − k.
If RVs X and Y are continuous:
fX(x) fY (y) =
∫ ∞−∞
fX(z − y)fY (y)dy =
∫ ∞−∞
fY (z − x)fX(x)dx. (97)
Lecture: Reminder of probability 47
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
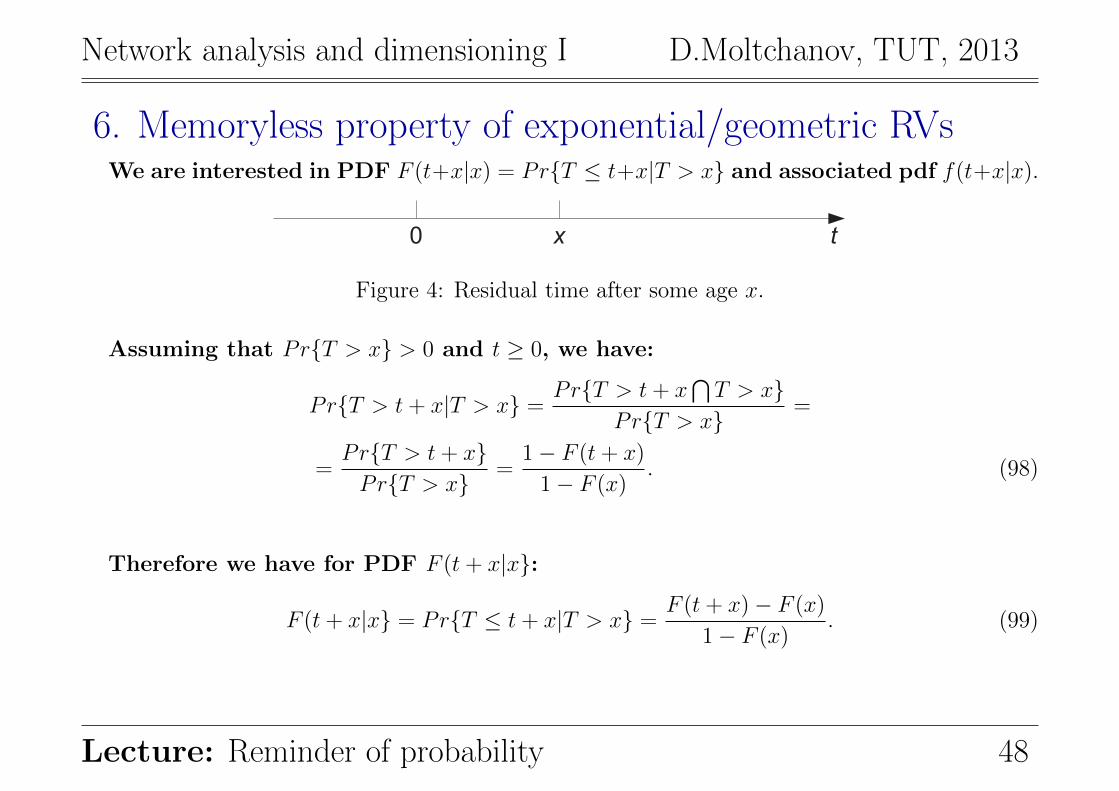
6. Memoryless property of exponential/geometric RVsWe are interested in PDF F (t+x|x) = PrT ≤ t+x|T > x and associated pdf f(t+x|x).
x t0
Figure 4: Residual time after some age x.
Assuming that PrT > x > 0 and t ≥ 0, we have:
PrT > t+ x|T > x =PrT > t+ x
⋂T > x
PrT > x=
=PrT > t+ xPrT > x
=1− F (t+ x)
1− F (x). (98)
Therefore we have for PDF F (t+ x|x:
F (t+ x|x = PrT ≤ t+ x|T > x =F (t+ x)− F (x)
1− F (x). (99)
Lecture: Reminder of probability 48
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
For pdf of residual lifetime we have the following expression:
f(t+ x|x =f(t+ x)
1− F (x). (100)
Substituting exponential PDF into expression for F (t+ x|x):
F (t+ x|x) =(1− e−(t+x)λ)− (1− e−λx)
1− (1− e−λx)=
1
e−λx− e−λ(t+x)
e−λx− 1
e−λx+e−λx
e−λx=
= −e−λ(t+x)−(−λx) + 1 = −e−λt−λx+λx + 1 = 1− e−λt = F (t). (101)
Substituting exponential pdf into expression for f(t+ x|x):
f(t+ x|x) =λe−(t+x)λ
1− (1− e−λx)= λe−λt = f(t). (102)
Note the following:
• same property hold for discrete geometric distribution;
• in this sense exponential and geometric distribution are unique;
• for other distribution F (t+ x|x) and f(t+ x|x) are different than F (x) and f(x).
Lecture: Reminder of probability 49
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
7. Important distributionsWe will deal with:
• discrete distributions:
– Bernoulli;
– geometric;
– binomial;
– Poisson.
• continuous distributions:
– exponential;
– normal.
Next we have a short overview for reference purposes:
• pmf or pdf or CDF;
• moments: mean, variance;
• graphical illustration.
Lecture: Reminder of probability 50
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
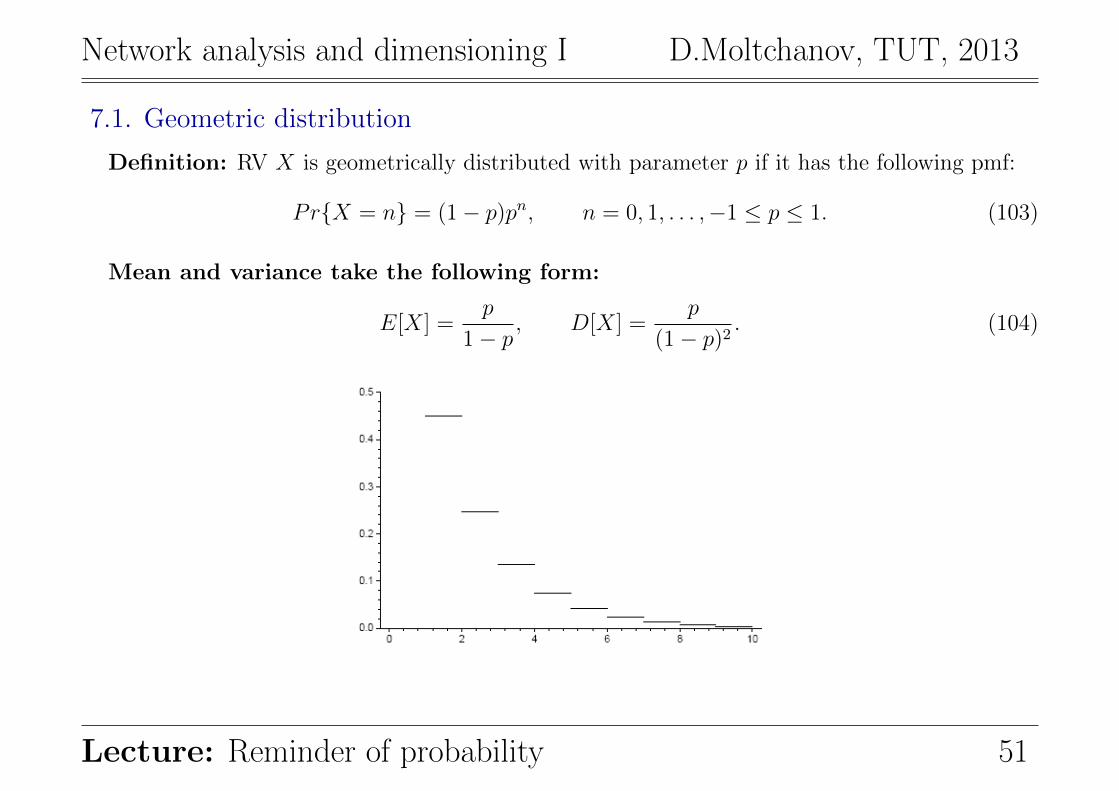
7.1. Geometric distribution
Definition: RV X is geometrically distributed with parameter p if it has the following pmf:
PrX = n = (1− p)pn, n = 0, 1, . . . ,−1 ≤ p ≤ 1. (103)
Mean and variance take the following form:
E[X] =p
1− p, D[X] =
p
(1− p)2. (104)
Lecture: Reminder of probability 51
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
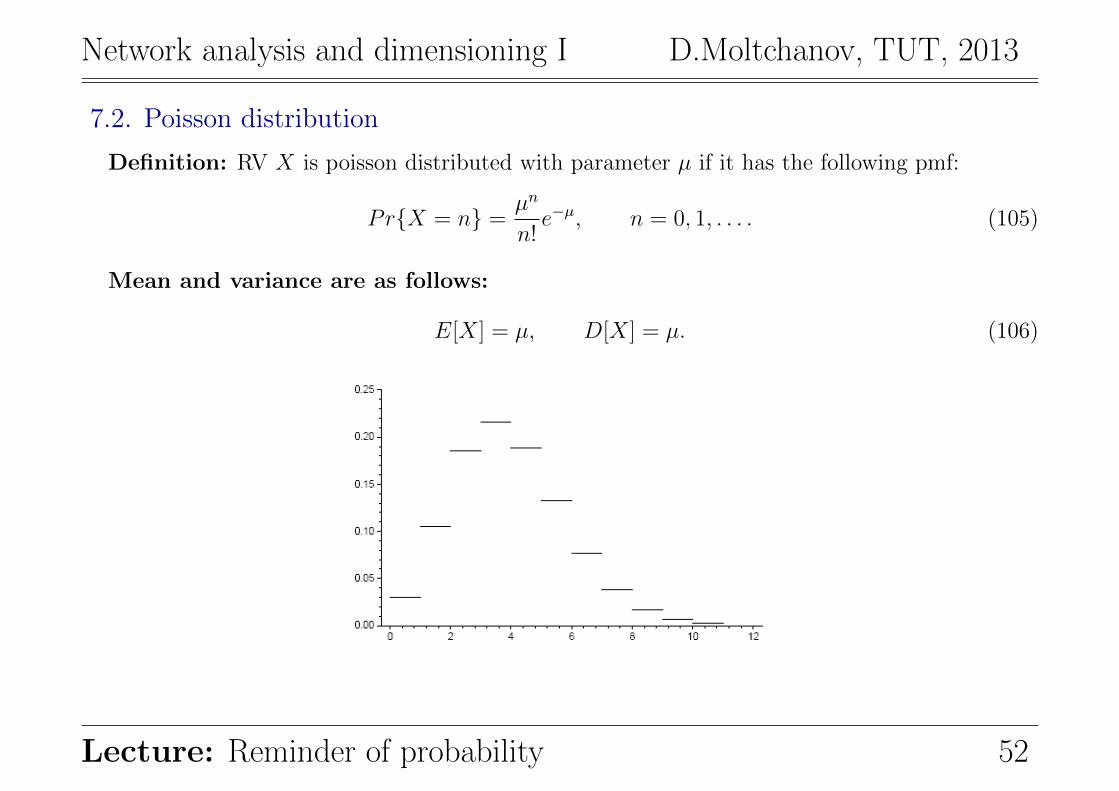
7.2. Poisson distribution
Definition: RV X is poisson distributed with parameter µ if it has the following pmf:
PrX = n =µn
n!e−µ, n = 0, 1, . . . . (105)
Mean and variance are as follows:
E[X] = µ, D[X] = µ. (106)
Lecture: Reminder of probability 52
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
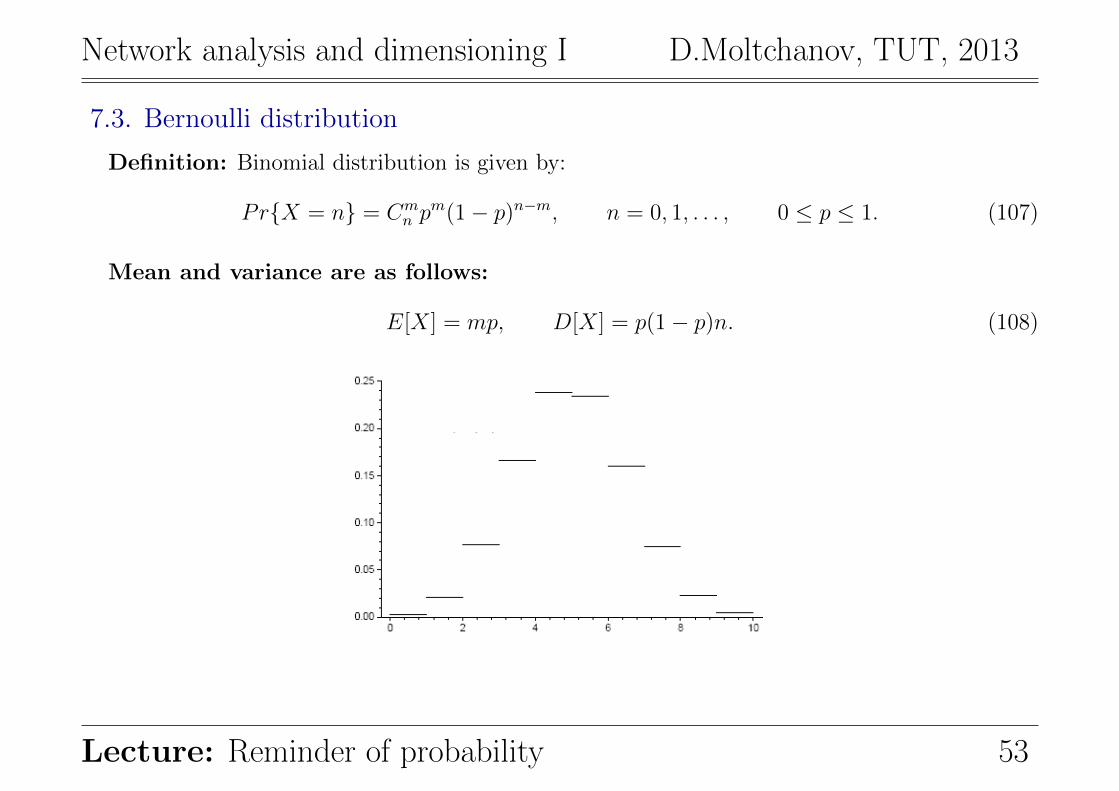
7.3. Bernoulli distribution
Definition: Binomial distribution is given by:
PrX = n = Cmn p
m(1− p)n−m, n = 0, 1, . . . , 0 ≤ p ≤ 1. (107)
Mean and variance are as follows:
E[X] = mp, D[X] = p(1− p)n. (108)
Lecture: Reminder of probability 53
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
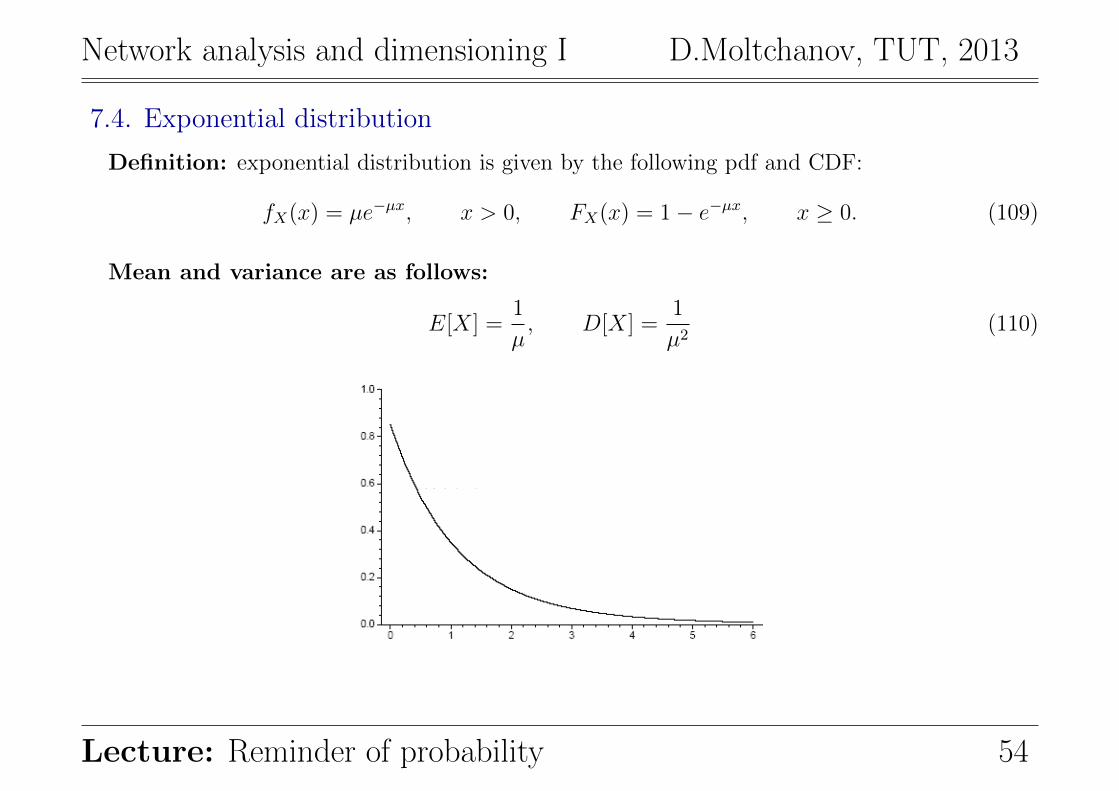
7.4. Exponential distribution
Definition: exponential distribution is given by the following pdf and CDF:
fX(x) = µe−µx, x > 0, FX(x) = 1− e−µx, x ≥ 0. (109)
Mean and variance are as follows:
E[X] =1
µ, D[X] =
1
µ2(110)
Lecture: Reminder of probability 54
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
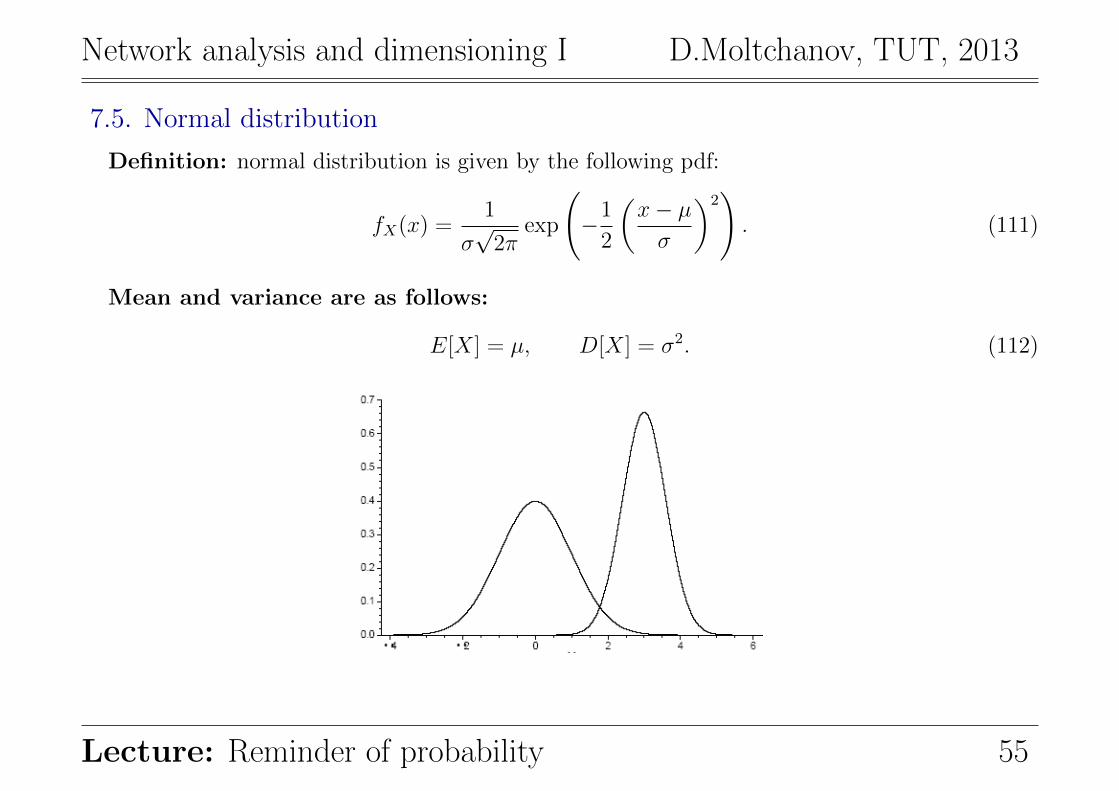
7.5. Normal distribution
Definition: normal distribution is given by the following pdf:
fX(x) =1
σ√
2πexp
(−1
2
(x− µσ
)2). (111)
Mean and variance are as follows:
E[X] = µ, D[X] = σ2. (112)
Lecture: Reminder of probability 55
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
7.6. Uniform distribution
Definition: uniform distribution is given by the following pdf:
fX(x) =1
b− a, b > a. (113)
Mean and variance are as follows:
E[X] =a+ b
2, D[X] =
1
12(b− a)2. (114)
Lecture: Reminder of probability 56
Network analysis and dimensioning I D.Moltchanov, TUT, 2013
7.7. Gamma distribution
Definition: gamma distribution is given by the following pdf:
fX(x) =1
bΓ
(x− ab
)c−1exp
(a− xb
). (115)
Mean and variance are as follows:
E[X] = a+ bc, D[X] = b2c. (116)
Lecture: Reminder of probability 57





























