-
5/26/2018 Regulation
1/33
RgulationRgulation
-
5/26/2018 Regulation
2/33
TSTL Cours de rgulation
2009-2010 page 2/33
Table des matires
1. Gnralits 41.1. Dfinitions 41.2. Influence de la rgulation
4
1.2.1. Baisse du cot de la transformation 41.2.2. Baisse du cot
de l'installation et gain de temps 4
1.2.3. Exemple industriel 51.3. Rgulation ou Asservissement
51.4. Les servomcanismes 51.5. Principe de fonctionnement 61.6.
Fonctionnement en boucle ouverte (Manuel) 61.7. Fonctionnement en
boucle ferme (Automatique) 6
2. Schmas dereprsentation 72.1. SchmaTI 72.2. Schmafonctionnel
92.3. Reprsentation fonctionnelle d'une boucle de rgulation 10
3. Caractristiques statiques et dynamiques d'un procd 11
3.1. Stabilit 113.1.1. Procds naturellement stables 113.1.2.
Systme instable 113.1.3. Procds naturellement instables - Procd
intgrateur 11
3.2. Rgimetransitoire - Rgime permanent 113.3. Caractristiques
statiques d'un procd 12
3.3.1. Courbe caractristique 123.3.2. Gain statique 123.3.3.
Erreur statique 123.3.4. Linarit 12
3.4. Caractristiques dynamiques 123.4.1. Temps de rponse
123.4.2. Dpassement 13
4. Les rgulateurs 134.1. Structure de principe dun rgulateur
134.2. Choixdu sens daction dun rgulateur 13
4.2.1. Dfinition 134.2.2. Rgle de stabilit 134.2.3. Mise en
oeuvre pratique 14
4.3. Raccordements lectriques 144.3.1. Le transmetteur 14
4.3.2. Schma de principe d'une boucle de courant 144.3.3.
Gnrateur ou rcepteur ? 154.3.4. Mise en oeuvre pratique 154.3.5.
Schma de cblage dune boucle de rgulation de dbit 154.3.6. Astuce de
calcul 15
5. Rgulation Tout Ou Rien 165.1. Action continue - Action
discontinue 165.2. Prsentation 165.3. Fonctionnement 165.4.
Influence du paramtre seuil 16
6. Rgulation Proportionnelle 176.1. Rappel 176.2. Prsentation
176.3. Bande proportionnelle 176.4. En fonctionnement 17
.................................................................................................................................................................................................................................................
......................................................................................................................................................................
....................................................
.............................................................................................................................................................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
.............................................................................................................................................................................................................................
..................................................................................................
.....................................................................................................................................................................................................
..........................................................................................................................................
............................................................................................................................................
..........................................................................................................................................................................................................................................................................................................
................................................................................................................
................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................
.....................................................................................................................................................................................
.........................................................................................................................................................................................
...............................................................................................................................................................................................
...................................................................................................................................................................................................................................
.........................................................................................................................................
..............................................................................................................................................................................
............................................................................................................................................................................................................................
.........................................................................................................................................................................................
...........................................................................................................................................................................................................................................
........................................................................................................................................................................................................
-
5/26/2018 Regulation
3/33
TSTL Cours de rgulation
2009-2010 page 3/33
6.5. Dtermination du point de fonctionnement 186.6. Influence de
la bande proportionnelle 18
6.6.1. Comportement statique 186.6.2. Comportement dynamique
19
6.7. Dcalage de bande - Talon - Intgrale manuelle 196.8.
Influence du dcalage de bande 19
6.8.1. Statique 19
6.8.2. Dynamique 206.9. Reprsentation fonctionnelle d'une
rgulation proportionnelle 207. Action intgrale 20
7.1. Comparaison avec intgrale manuelle 207.2. Qu'est-ce qu'une
action intgrale ? 217.3. Fonctionnement 217.4. Actions conjugues PI
217.5. Rponses indicielles 227.6. Influence du paramtre temps
intgral 22
7.6.1. Comportement statique 227.6.2. Comportement dynamique
23
8. Action Drive 238.1. Qu'est-ce qu'uneaction drive ? 238.2.
Fonctionnement 238.3. Actions conjugues PD 248.4. Rponses une rampe
248.5. Influence du paramtre temps driv en boucle ferme 25
8.5.1. Comportement statique 258.5.2. Comportement dynamique
25
9. Correcteur PID 259.1. Structures desrgulateurs PID 25
9.2. Rponse indicielle 269.3. Dterminer lastructure interne d'un
rgulateur 269.4. Influence des corrections P, I et D 26
9.4.1. Quand Xp augmente... 269.4.2. Quand Ti augmente...
269.4.3. Quand Td augmente... 26
10. Identification et Rglages 2710.1. Principes fondamentaux
2710.2. Les modlesde base 27
10.2.1. Retard pur 2710.2.2. Premier ordre gain unitaire 27
10.2.3. Intgrateur 2710.3. Rglages en boucle ouverte 28
10.3.1. tape 1 2810.3.2. tape 2 - Mthode simple 2810.3.3. tape 2
- Mthode Broda 2810.3.4. tape 3 - Rglages de Dindeuleux 29
10.4. Rglages en boucle ferme 2910.4.1. Mthode de Ziegler
Nichols 2910.4.2. Mthode du rgleur 30
11. tude de divers types de boucles de rgulation 31
11.1. Boucle simple 3111.2. Boucle de rgulation cascade (cascade
control) 3111.3. Boucle de rgulation de rapport (Ratio control)
3211.4. Boucle de rgulation par partage d'tendue (split-range)
3211.5. Boucle de rgulation prdictive - mixte - priori
(Feedforward) 33
..........................................................................................................................................
............................................................................................................................................................................
............................................................................................................................................
.................................................................................................................
.................................................................................................................................................................................................................................................................
.......................................................................................................................................................
............................................................................................................................................................................................................
.............................................................................................................................................................................
............................................................................................................................................................................
....................................................................................................................................................................................................
...........................................................................................................................................................................................................
...............................................................................................................................................
............................................................................................................................................................................
........................................................................................................................................................................................................
..................................................................................................................................................................................................................................................
.................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................
.............................................................................................................................................................................................................
.............................................................................
..................................................................................................................................................................................................
......................................................................................................................................................................................................................................................................................
..............................................................................................................................................................
............................................................................................................................................................................
................................................................
...........................................................................................................................................................................................................................
......................................................................
-
5/26/2018 Regulation
4/33
TSTL Cours de rgulation
2009-2010 page 4/33
1. Gnralits1.1. Dfinitions
La rgulationregroupe l'ensemble des techniques utilises visant
contrler unegrandeur physique. Exemples de grandeur physique :
Pression, temprature, dbit,niveau etc...
La grandeur rgle, c'est la grandeur physique que l'on dsire
contrler. Elle donne
son nom la rgulation. Exemple : une rgulation de temprature. La
consigne: C'est la valeur que doit prendre la grandeur rgle. La
grandeur rglanteest la grandeur physique qui a t choisie pour
contrler la
grandeur rgle. Elle n'est gnralement pas de mme nature que la
grandeur rgle. Les grandeurs perturbatricessont les grandeurs
physiques qui influencent la
grandeur rgle. Elles sont gnralement pas de mme nature que la
grandeur rgle. L'organe de rglageest l'lment qui agit sur la
grandeur rglante.
1.2. Influence de la rgulation
1.2.1. Baisse du cot de la transformationLa bonne rgulation amne
une plus grande prcision sur la grandeur rgle, permettant
unediminution de la consigne pour un fonctionnement la limite.
Bonne rgulation Mauvaise rgulation
0%
10%
20%
30%
40%
-3 -2 -1 0 +1 +2 +3
Dans l'exemple ci-dessus, la diminution de la disparit dans la
valeur de la grandeur rgle,entrane une diminution de la consigne de
1 !m pour l'obtention d'une paisseur minimale surtoutes les
pices.
1.2.2. Baisse du cot de l'installation et gain de tempsOn
reconnat une bonne rgulation par sa capacit acclrer le systme sans
entraner de
dpassement de la consigne. Dans l'exemple ci-dessous une bonne
rgulation entrane unediminution du temps ncessaire l'lvation de la
temprature, ainsi que l'conomie d'undispositif de
refroidissement.
Temps
Mauvaise rgulation
Consigne
Bonne rgulation
Gr
andeurrgle
-
5/26/2018 Regulation
5/33
TSTL Cours de rgulation
2009-2010 page 5/33
1.2.3. Exemple industriel
1.3. Rgulation ou Asservissement Dans une rgulation, on
s'attachera maintenir constante la grandeur rgle d'un
systme soumis des perturbations. Dans un asservissement, la
grandeur rgle devra suivre rapidement les variations de
la consigne.
1.4. Les servomcanismesOn appelle servomcanisme, un systme
asservi dont le rle consiste amplifier la puissanceet dont la
grandeur rgle est une grandeur mcanique tel qu'un effort, un
couple, la position
ou l'une de ses drives par rapport au temps, comme la vitesse et
l'acclration.
-
5/26/2018 Regulation
6/33
TSTL Cours de rgulation
2009-2010 page 6/33
1.5. Principe de fonctionnementPour rguler un systme physique,
il faut :
Mesurer la grandeur rgle avec un capteur. Rflchir sur l'attitude
suivre : c'est la fonction du rgulateur. Le rgulateur compare
la grandeur rgle avec la consigne et labore le signal de
commande. Agir sur la grandeur rglante par l'intermdiaire d'un
organe de rglage.
On peut reprsenter une rgulation de la manire suivante :
Rflchir Agir Gnrer
Mesurer + Communiquer
GrandeurRglante
Grandeur mesure
Consigne
Capteur + Transmetteur
ActionneurRgulateur Procd
Perturbation(s)
Grandeurrgle
Commande
1.6. Fonctionnement en boucle ouverte (Manuel)On parle de
fonctionnement en boucle ouverte quand c'est l'oprateur qui contrle
l'organe derglage. Ce n'est pas une rgulation.
PerturbationZ
Commande
Y
Grandeur rgleX
SYSTEME
1.7. Fonctionnement en boucle ferme (Automatique)C'est le
fonctionnement normal d'une rgulation. Le rgulateur compare la
mesure de lagrandeur rgle et la consigne et agit en consquence pour
s'en rapprocher.
PerturbationZ
CommandeY
Grandeur rgle
XSYSTEMEREGULATEUR
MesureX
ConsigneW
-
5/26/2018 Regulation
7/33
TSTL Cours de rgulation
2009-2010 page 7/33
2. Schmas de reprsentation2.1. Schma TILa norme NF E 04-203
dfinit la reprsentation symbolique des rgulations, mesures
etautomatisme des processus industriels. Les instruments utiliss
sont reprsents par descercles entourant des lettres dfinissant la
grandeur physique rgle et leur (s) fonction (s). Lapremire lettre
dfinie la grandeur physique rgle, les suivantes la fonction des
instruments.
TICPT
Grandeurs rgles
Fonctions
Transmetteur
de
Pression
Rgulateur
Indicateur
de
Temprature
Les parcours de linformation est matrialis par une flche dont
lallure dpend du supportde linformation.
PT PC
Transmetteurde
Pression
Rgulateurde
Pression
Mesurede
Pression
Schma TI dune rgulation de niveau dans le ballon avec correction
de tendance :
FY3
FY2
FC1
FT1
LC2
LT2
FT3
Vapeur
Eau
X3
X2 Y2
X1 Y1
W1
Ballon
-
5/26/2018 Regulation
8/33
TSTL Cours de rgulation
2009-2010 page 8/33
Les principales lettres utilises :
1 2 3 4 5
Variable mesure Premier lment Fonction Dispositif rglant
Signalisation
1.1 1.2 1.3 2.1 2.2 2.3 2.4 3.1 3.2 3.3 4.1 4.2 4.3 5.1 5.2
Signification Initiale Modifi-cateur
ElmentprimaireCapteur
Indica-teur
Trans-metteur
Enregis-treurImpri-mante
Rgula-tion
Commu-tationContacts
Relaisdiverset decalcul
Organederglage
Action-neur
Autono-me
Lampetmoin
Alarme
A Z D FQ
E I T R C H (H)S M
L (L)
Y V Z CV H(H)L M
L (L)
H (H)A M
L (L)
TensionElectrique
E EI
Dbit F FFFQ
FE FIFFIFQI
FTFITFFTFQTFFIT..
FRFFRFQR
FC FICFFCFRCFFICFFRC
FSHHFSHFSMFSLFSLL
FYFFY
FVFFV
FZFFZ
FCV FLHHFFLHHFQLHHFLHFFLH...
FAHHFFAHHFQAHHFAHFFAH..
Courantlectrique
I II IAHHIAH..
Action humaine H HC,HICNiveau L LE LI LT,LIT LR LC
LICLRC
LSHHLSHLSM..
LY LV LZ LCV LLHHLLHLLM..
LAHHLAHLAM..
Pression P PD PE PIPDI
PTPDT
PRPDR
PCPICPDCPDIC
PSHHPDSHH...
PYPDY
PVPDV
PZPDZ
PCVPDCVPSV
PLHHPDLHHPLH....
PAHHPDAHHPAH...
Temprature T TE TI TTTIT
TR TCTIC
TSHHTSH...
TY TV TZ TCV TLHHTLH..
TAHHTAH..
Modificateur 1.3 D : diffrentiel F : fraction (rapport) Q :
quantit (totalisateur, intgrateur, compteur)
Commutation 1.3 Lampe tmoin 5.1 et Alarme 5.2peuvent comporter
un qualificatif:HH : trs haut H : haut M : milieu (intermdiaire) L
: bas LL : trs bas
Les principaux symboles utiliss :
-
5/26/2018 Regulation
9/33
TSTL Cours de rgulation
2009-2010 page 9/33
2.2. Schma fonctionnelLe schma fonctionnel tente de reprsenter
les relations entre les diffrentes grandeursphysiques des boucles
de rgulation. Il sera compos uniquement des lments suivants :
Des lignes de parcours d'une grandeur physique. Ces ligne
reprsente le parcours d'une
grandeur physique de la boucle de rgulation :
Grandeur physique
Des blocs qui reprsentent un ou plusieurs lments de la chane de
rgulation qui assure
la relation entre deux grandeurs physiques, relation caractrise
par la fonction de
transfert. La fonction de transfert permet pour tous types de
signaux davoir la relation
suivante :
s = H "e
H
se
Les sommateurs ou comparateurs, qui permettent laddition ou la
soustraction de
grandeurs physiques :
E1
E2
S= E1 + E2
+
+ E1
E2
S= E1 - E2
+
-
-
5/26/2018 Regulation
10/33
TSTL Cours de rgulation
2009-2010 page 1/33
2.3. Reprsentation fonctionnelle d'une boucle de rgulationDune
manire gnrale, une boucle de rgulation peut tre reprsente de la
maniresuivante :
C K S
M
PerturbationZ
Correcteur Organe derglage
Procd
Capteur
ConsigneW
MesureX
Grandeur rgleXY
SYSTEME
REGULATEUR
partir dun schma TI, on peut construire le schma fonctionnel
correspondant.
Exemple, une rgulation de pression :
PTPI
C
Qe Qs
X
YW !
"#
$%&
'
(
)
Schma TI
C H1 H2
R
!
Qs"
Qe
#
$%
&'
(
W)
X
Y
Schma Fonctionnel
-
5/26/2018 Regulation
11/33
TSTL Cours de rgulation
2009-2010 page 1/33
3. Caractristiques statiques et dynamiques d'un pro-cd
3.1. Stabilit
3.1.1. Procds naturellement stablesUn procd est dit
naturellement stable si une variation finie de la grandeur rglante
E
correspond une variation finie de la grandeur rgle S.
H
Systme tempstemps
e
e s
s
Exemple : Grandeur rgle : temprature d'une pice ; Grandeur
rglante : puissance duradiateur.
3.1.2. Systme instableUn systme est dit instable si une
variation finie de la grandeur rglante E correspond unevariation
continue de la grandeur rgle S.
H
Systme tempstemps
e
e s
s
3.1.3. Procds naturellement instables - Procd intgrateurOn dit
qu'un procd est intgrateur, si pour une entre E constante, la
sortie S est une droitecroissante. Si un procd est intgrateur, il
est instable.
H
Systme tempstemps
e
e s
s
Exemple : Grandeur rgle : niveau ; Grandeur rglante : dbit
d'alimentation.
3.2. Rgime transitoire - Rgime permanentOn dit que le systme
fonctionne en rgime permanent, si l'on peut dcrire son
fonction-nement de manire simple. Dans le cas contraire, on parle
de rgime transitoire.
temps
Rgime transitoire Rgime permanentRgime permanent Pour passer
d'un rgime permanent un autre, le systme passe par un rgime
transitoire.
-
5/26/2018 Regulation
12/33
TSTL Cours de rgulation
2009-2010 page 12/33
3.3. Caractristiques statiques d'un procd
3.3.1. Courbe caractristiqueLa caractristique statique est la
courbe reprsentative de la grandeur de sortie S en fonctionde la
grandeur d'entre E : S = f(E).
Remarque :On ne peut tracer la caractristique statique que d'un
systme stable.
3.3.2. Gain statiqueSi le systme est naturellement stable, le
gain statique Gs est le rapport entre la variation de lagrandeur de
sortie $s et la variation de la grandeur d'entre $e.
Gs =s
e
3.3.3. Erreur statiqueSi le systme est stable, l'erreur statique
%s est la diffrence entre la consigne w et la mesure xen rgime
permanent.
!s= w - x
3.3.4. LinaritUn systme linaire obit au principe de
superposition. L'effet de la somme d'excitations estgal la somme
des effets de chaque excitation.
3.4. Caractristiques dynamiques3.4.1. Temps de rponseC'est
l'aptitude du systme suivre les variations de la consigne. Dans le
cas d'un chelon dela consigne, la croissance de la grandeur rgle
dfinit les diffrents temps de rponse. Dansl'exemple ci-dessous, on
mesure le temps de rponse 5 qui est gal t1 t0.
Tempst0
Consigne
grandeur rgle
t1
100%
105%
95%
-
5/26/2018 Regulation
13/33
A B
TSTL Cours de rgulation
2009-2010 page 1 /33
A B
3.4.2. DpassementLe premier dpassement permet de qualifier la
stabilit d'un systme. Plus celui-ci seraimportant, plus le systme
sera proche de l'instabilit. Dans certaines rgulations,
aucundpassement n'est tolr. Dans d'autres rgulation, un dpassement
infrieur 15 % estconsidr comme acceptable.Dans la rponse indicielle
ci-dessous, le premier dpassement est de 14%.
Temps
Consigne
grandeur rgle
100%114%
4. Les rgulateurs4.1. Structure de principe dun rgulateur
Le rgulateur compare la mesure et la consigne pour gnrer le
signal de commande. Le signal de mesure X est l'image de la
grandeur rgle provenant d'un capteur et
transmetteur, est transmise sous forme d'un signal lectrique ou
pneumatique ;
La consigne W peut-tre interne (fournie en local par loprateur)
ou externe ; L'affichage de la commande Y se fait en % et
gnralement en units physiques pour la
consigne et la mesure. Si un rgulateur est en automatique, sa
sortie dpend de la mesure et de la consigne.
Ce n'est pas le cas s'il est en manuel.
4.2. Choix du sens daction dun rgulateur
4.2.1. DfinitionUn procd est direct, quand sa sortie varie dans
le mme sens que son entre. Dans le cascontraire, le procd est dit
inverse. Dans un rgulateur, la mesure est considre comme une
entre.4.2.2. Rgle de stabilitDans la barque reprsente ci-contre,
si A se penche tropvers la gauche, B est oblig de se pencher sur la
droitepour maintenir la barque en quilibre et ne pas finir
dansleau. Dans une boucle de rgulation cest la mmechose, le
rgulateur doit agir pour limiter les variationsdu procd.
Rgle :Pour avoir un systme stable dans une boucle de
rgulation, le rgulateur doit agir de manire s'opposer une
variation de la mesure X nondsire. Si X augmente, le couple
rgulateur + procd doit tendre le faire diminuer.
-
5/26/2018 Regulation
14/33
-
5/26/2018 Regulation
15/33
TSTL Cours de rgulation
2009-2010 page 15/33
4.3.3. Gnrateur ou rcepteur ?
4.3.4. Mise en oeuvre pratiqueChercher le nombre de boucle de
courant. Il y a deux fois plus de boucles de courant que deboucles
de rgulation.
Pour chaque boucle, faire la liste de l'instrumentation mise en
oeuvre. Dans chaque liste, dterminer lunique lment gnrateur. Relier
le (+)du gnrateur au (+)dun rcepteur avec un fil rouge. Relier le
(-)du gnrateur au (-)dun rcepteur avec un fil noir. Si possible,
relier les (+)disponibles des rcepteurs, aux (-)disponibles dautres
rcep-
teurs avec un fil bleu.
Remarque : Dans chaque boucle de courant, il y a autant de fils
de liaison que d'lments.
4.3.5. Schma de cblage dune boucle de rgulation de dbit
X Y
Rgulateur
Transmetteur Vanne de rglage
Alimentation 24V
4.3.6. Astuce de calculDans une boucle de courant, le courant
est limage dune grandeur physique. Grandeurphysique qui peut tre
une mesure ou une commande. On pourra reprsenter cette
relationlinaire laide du graphique suivant :
4 20 mAi
Xmin Xmaxx
Ce graphique nous permet alors d'crire la relation suivante
:
i 4
xXmin=
20 4
XmaxXmin
Rcepteur
Transmetteur 2 fils
Mesure du rgulateur
Organe de rglage
Enregistreur
Gnrateur
Transmetteur 4 fils
Transmetteur 3 fils
Alimentation
Commande rgulateur
-
5/26/2018 Regulation
16/33
W-X
Y%
100 %
0+DIFF-DIFF
TSTL Cours de rgulation
2009-2010 page 16/33
W-X
Y%
100 %
0+DIFF-DIFF
5. Rgulation Tout Ou Rien5.1. Action continue - Action
discontinueOn spare le fonctionnement d'un rgulateur en deux types
d'actions distincts :
Une action continue avec une sortie du rgulateur peut prendre
toutes les valeurscomprises entre 0 et 100%.
Une action discontinue, dans laquelle la sortie Y du rgulateur
ne prend que deux
valeurs. On appelle aussi le fonctionnement discontinue
fonctionnement Tout Ou Rien.
Y 100%0%
Action continue
Y 100%0%
Action discontinue
5.2. PrsentationLe fonctionnement TOR se caractrise par deux
tats possibles pour la commande. Celui quicorrespond la commande
maximale (100 %) et celui qui correspond la commandeminimale (0%).
Un seuil limite la frquence de com-mutation du systme pour viter
une fatigue prmature
des organes de rglages.Le rglage du rgulateur se fait l'aide de
deuxparamtres :
La consigne W, fournie en unit de mesure ; Le seuil DIFF, donn
gnralement en % de la
consigne.
5.3. FonctionnementLa grandeur rgle oscille autour du point de
fonctionnement. chaque dpassement desseuils de commutation, la
sortie du rgulateur change d'tat. Compte tenu de l'inertie
dusystme, la valeur absolue de l'erreur %peut dpasser le seuil
DIFF.
Remarque : La mesure ne peut pas tre constante dans ce type de
rgulation, le systme est enrgime d'instabilit entretenue.
Temps0
100 %
Mesure X Commande Y
Consigne W
W + Diff
W - Diff
Y%
X
100%
0%
WW-Diff W+Diff
5.4. Influence du paramtre seuilLa valeur du seuil influe sur la
frquence des permutations et l'amplitude de la variation de
lagrandeur mesure. Plus le seuil est faible, plus la frquence est
leve, moins l'amplitude estgrande.Une augmentation de la frquence
rduit d'autant la dure de vie de l'organe derglage.
temps
X
2!Seuil
temps
X
2!Seuil
-
5/26/2018 Regulation
17/33
Commande
Xp %
Erreur
Temps
% pleineechelle
Consigne
Mesure
0
Y%
100%
Temps
TSTL Cours de rgulation
2009-2010 page 17/33
Commande
Xp %
Erreur
Temps
% pleineechelle
Consigne
Mesure
0
Y%
100%
Temps
6. Rgulation Proportionnelle6.1. RappelPleine chelle :Cest
ltendu des mesures que peut prendre le rgulateur.
PE = X(100%)-X(0%)Elle est rgle au niveau du rgulateur par deux
paramtres. Sur les rgulateurs Eurotherm dela salle de TP, le nom
des paramtres est VALL et VALH.
6.2. Prsentation Dans la mesure o Y est compris entre 0% et
100%, la valeur de la commande Y du
rgulateur est proportionnelle lerreur (W-X).
Pour un rgulateur inverse, on a :Y = Kp(W-X)
avec Kp est le gain proportionnel.
6.3. Bande proportionnelleSi on reprsente la relation entre la
commande et lerreur, la bande proportionnelle Xp est la
partie o la commande est proportionnelle lerreur.
On remarque que 100 = Kp "Xp, donc :
Xp =Kp
6.4. En fonctionnementLors d'une variation en chelon de la
consigne, le systme une rponseressemblant celle reprsente sur
lafigure ci-dessous.
La mesure volue pour se rapprocherde la consigne, sans jamais
latteindre.
1000 10 20 30 40 50 60 70 80 90
100
0
10
20
30
40
50
60
70
80
90
Erreur !
CommandeY
Bande Proportionnelle
-
5/26/2018 Regulation
18/33
TSTL Cours de rgulation
2009-2010 page 18/33
6.5. Dtermination du point de fonctionnementLa rgulation d'un
procd peut tre reprsente par la figure ci-dessous.
X
Y
W
W
Rgulateur Procd
Y
X
YYX X
On trace sur le mme graphe les relations entre la mesure X et la
commande Y, pour lergulateur et le procd.
Le point de fonctionnement en rgime permanent appartient aux
deux courbes. Ilcorrespond leur intersection (Xs, Ys).
La valeur de l'erreur statique est alors Es = W - Xs.
X
Y
W
Pointde
fonctionnement
Xs
Ys
W-Xp
6.6. Influence de la bande proportionnelle
6.6.1. Comportement statiqueOn s'aperoit graphiquement que plus
la bande proportionnelle est petite, plus l'erreur enrgime
permanent est petite.
Sur la figure ci-contre Xp1 < Xp2.
Caractristique statique
X
Y
0
100 % --
W
erreurstatiquePoint
defonctionnement
Xp2
Xp1
-
5/26/2018 Regulation
19/33
1000 W10 20 30 40 60 70 80 90
100
0
10
20
30
40
50
60
70
80
90
Mesure
CommandeY
SansY
o
AvecY
oCaractristiquestatique
!s2
!s1
TSTL Cours de rgulation
2009-2010 page 19/33
100 W10 20 30 40 60 70 80 90
100
0
10
20
30
40
50
60
70
80
90
Mesure
CommandeY
SansY
o
AvecY
oCaractristiquestatique
!s2
!s1
6.6.2. Comportement dynamiquePlus la bande proportionnelle est
petite, plus le temps de rponse du systme est court. Eneffet, pour
la mme erreur, la commande fournie est plus importante. Si la bande
proportion-nelle se rapproche trop de 0, le systme devient
instable.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0 2 4 6 8 10 12
Temps en s
Grandeurs
Consigne
Xp = 5 %
Xp = 20 %
Xp = 10 %
Le fonctionnement TOR correspond une bande proportionnelle
nulle.
6.7. Dcalage de bande - Talon - Intgrale manuelleDe manire plus
gnrale, la formule qui relie la sortie Y du rgulateur la diffrence
entre lamesure et le consigne est :
Y = Kp (W-X) + YoAvec Yo, le dcalage de bande rgler sur le
rgulateur. Ainsi, pour un rgulateur actioninverse on a la
caractristique ci-contre.
6.8. Influence du dcalage de bande6.8.1. StatiqueOn s'aperoit
qu'avec un bon choix de lavaleur du dcalage de bande, on rduit
trsfortement l'erreur statique.
60-20 -10 0 10 20 30 40 50
100
0
10
20
30
40
50
60
70
80
90
Erreur !
CommandeY
Bande Proportionnelle
Yo
-
5/26/2018 Regulation
20/33
TSTL Cours de rgulation
2009-2010 page 20/33
6.8.2. DynamiqueL'influence sur le comportement en rgime
transitoire est principalement fonction de lacaractristique
statique.
6.9. Reprsentation fonctionnelle d'une rgulation
proportion-nelle
Dans le cas d'une rgulation proportionnelle action inverse, le
schma fonctionnelle du
rgulateur devient :
Y = Kp (W-X) + Yo
7. Action intgrale7.1. Comparaison avec intgrale manuelleOn a vu
dans le paragraphe prcdant l'utilit de l'intgrale manuelle. Si on
la choisie bien, onannule lerreur statique.
W X
Y
100%
Yo
Mais cette valeur doit tre modifi quand :
Kp+-
W
X
Y
++
Yo
Kp =Xp
W X
Y
100%
Yo
La caractristique statique se dplace sous l'effet
d'une grandeur perturbatrice
W X
Y
100%
Yo
La valeur de la consigne W change
-
5/26/2018 Regulation
21/33
TSTL Cours de rgulation
2009-2010 page 21/33
7.2. Qu'est-ce qu'une action intgrale ?On veut :
Une action qui volue dans le temps ; Une action qui tend annuler
l'erreur statique.
Cette fonction est remplie par l'oprateur mathmatique : 'intgral
par rapport au temps'.Ainsi, dans un rgulateur, on dfinie l'action
intgrale partir d'un des deux paramtres Ti ouKi avec :
Y(t) = Ki
to
(W(t)X(t))dt= 1
Ti
to
(W(t)X(t))dt
Ti est le temps intgral, dfinie en unit de temps. Ki le gain
intgral, dfinie en coup parunit de temps.
7.3. FonctionnementPour tudier l'influence de l'action intgrale,
on s'intressera la rponse du module intgral un chelon. Plus Ki est
grand (Ti petit), plus la valeur de la sortie Y augmente
rapidement.Le temps Ti est le temps pour que la commande Y augmente
de la valeur de lentre E=W-X.
1
Ti
Z
E
E
Y
Y
temps tempsTi0
Pour annuler l'action intgrale, il existe plusieurs solutions,
fonction du rgulateur.Si on rgle l'action intgrale l'aide du gain
Ki, il suffit de mettre Ki zro.Dans le cas o le rglage du gain
intgral se fait l'aide du temps Ti, il y a deux solutions :
Mettre Ti zro, si c'est possible ; Sinon mettre Ti sa valeur
maximale. Si le correcteur est coopratif, il indiquera Supp.
Dans les rgulateurs de la salle de TP, il faut mettre Ti 0, pour
quil affiche Ti = Supp.
7.4. Actions conjugues PIEn gnral, le rgulateur ne fonctionne
pas en action intgrale pure (trop instable). Ilfonctionne en
correcteur Proportionnel Intgral (PI). Le couple, Bande
Proportionnelle -Temps Intgral, dfinit deux types de fonctionnement
qui sont reprsents dans le tableausuivant.
Consquences :Dans un rgulateur srie, la modification de la bande
proportionnelle,entrane la modification de l'influence de l'action
intgrale. Avant de procder au rglage du
rgulateur, il est ncessaire de connatre sa structure
interne.
Srie
+
+
YE100
X p
1
Ti
Z
Parallle
+
+
Y
E1
Ti
Z
100
X p
-
5/26/2018 Regulation
22/33
TSTL Cours de rgulation
2009-2010 page 22/33
7.5. Rponses indiciellesOn observe la commande dun rgulateur en
rponse un chelon $ derreur. Cest cepremier chelon qui entrane un
second chelon Kp"$sur la commande du rgulateur.
Rgulateur PI parallle :
EKp!"
Ti
"
"
Kp=100/Xp
+
+
Y
E1
Ti
Z
100
X p
Y
EPremier
Y =Kp E(t) + 1
T i
E(t)dt
EKp!"
Ti
"
Kp!"
Kp=100/Xp
Rgulateur PI srie :
Y
E
Second
+
+
YE
100X p
1Ti
Z
Y =Kp E(t) +Kp
T i
E(t)dt
7.6. Influence du paramtre temps intgral
7.6.1. Comportement statiqueQuelle que soit la valeur de
l'action intgrale, l'erreur statique est nulle (si le systme
eststable).
-
5/26/2018 Regulation
23/33
TSTL Cours de rgulation
2009-2010 page 23/33
7.6.2. Comportement dynamiqueLors d'une rponse indicielle, plus
Ti est petit plus le systme se rapproche de l'instabilit.
Influence de Ti
0
0,2
0,4
0,6
0,8
1
1,2
0 10 20 30 40 50 60
Temps en s
Grandeurs
Consigne
Ti = 5 s
Ti = 10 s
Ti = 20 s
8. Action Drive8.1. Qu'est-ce qu'une action drive ?C'est une
action qui amplifie les variations brusques de la consigne. Elle a
une action oppose
l'action intgrale. Cette fonction est remplie par l'oprateur
mathmatique : 'driver parrapport au temps'.
Y(t) = T ddE(t)
dtAinsi, dans un rgulateur, on dfinie l'action driv partir du
temps driv Td avec :Le temps driv Td s'exprimer en unit de
temps.
8.2. FonctionnementPour tudier l'influence de l'action drive, on
s'intressera la rponse du module driv une rampe.
E
E
Y
Y
temps tempsTd
Tdd
dt
0
Le temps Td est le temps pour que l'entre E augmente de la
valeur de la sortie Y. Plus Td est grand, plus la valeur de la
sortie Y sera importante. Pour supprimer l'action drive, il suffit
de mettre Td 0.
-
5/26/2018 Regulation
24/33
TSTL Cours de rgulation
2009-2010 page 24/33
8.3. Actions conjugues PDEn gnral, le rgulateur ne fonctionne
pas en action drive pure (trop instable). Il fonc-tionne en
correcteur Proportionnel Driv (PD). Le doublet, Bande
Proportionnelle - Tempsdriv, dfinit deux structures qui sont
reprsents sur les figures suivantes.
Consquences : Dans un rgulateur srie, la modification de la
bande proportionnelle,entrane la modification de l'influence de
l'action drive. Avant de procder au rglage durgulateur, il est
ncessaire de connatre sa structure interne.
8.4. Rponses une rampe
10-1 0 1 2 3 4 5 6 7 8 9
100
0
10
20
30
40
50
60
70
80
90
Temps
Signaux
Rgulateur PD parrallle
!
y
y = Kp.+ Tdd
dt
!
Kp.!
dd
Td
Premier
10-1 0 1 2 3 4 5 6 7 8 9
100
0
10
20
30
40
50
60
70
80
90
Temps
Signaux
Rgulateur PD srie
!
y
y= Kp(+T dd
dt)
!
Kp.!
d
d
Td
Second
Srie
Tdd
dtKp
+
+
! y
Parallle
ddt
p
+
+
! y
-
5/26/2018 Regulation
25/33
TSTL Cours de rgulation
2009-2010 page 25/33
8.5. Influence du paramtre temps driv en boucle ferme
8.5.1. Comportement statiqueLaction drive a peu dinfluence dans
le comportement statique.
8.5.2. Comportement dynamiqueLors d'une rponse indicielle, plus
Td est grand plus le systme est rapide, plus le premierdpassement
est faible. Attention, si Td est trop grand cela entrane une
instabilit due unetrop forte amplification des parasites.
Temps en s
Td = 1s
Td = 2s
Td = 5s
Influence de Td
Mesures
9. Correcteur PID9.1. Structures des rgulateurs PID
Les trois corrections, proportionnelle, intgrale et drive,
permettent de dfinir troisstructures de rgulateur diffrentes.
Remarque :Les rgulateurs lectroniques (tous ceux de la salle de
travaux pratiques) ont unestructure mixte.
Y
E +
+
+
100
X p
Tdd
dt
1
Ti
Z
Y
E+
+
+100
X p Ti
Z
Tdd
dt
+
+
YE+
+1
TiZ Tdd
dt
100
X p
Y(t) =KpE+ 1
Ti
t
0
E dt+T ddE
dt
Structure parallle
Y(t) = Kp {E+ 1
Ti
t
0
E dt+T ddE
dt}
Structure mixte
Y(t) = Kp {(1 +Td
T i)E+
1
Ti
0
E dt+T ddE
dt}
Structure srie
-
5/26/2018 Regulation
26/33
-
5/26/2018 Regulation
27/33
TSTL Cours de rgulation
2009-2010 page 27/33
10. Identification et Rglages10.1. Principes fondamentauxEn
gnral, le rglage acadmique d'une boucle de rgulation se fait en
trois tapes.
Relever des caractristiques du systme. Dterminer les paramtres
reprsentants le systme dans le modle choisi. Calcul du correcteur
PID l'aide de ces paramtres.
10.2. Les modles de basePour se donner une image des diffrents
modles de base, on s'intressera la rponse de cesmodles un
chelon.
SystmeEchelon Mesures
Y X
Rgulateuren Manu
10.2.1. Retard pur
Signaux
Temps tto
Retard R
Y
X
Le signal de sortie est identique au signal d'entre, mais dcal
dans le temps du retard R.X t = Y tR
10.2.2. Premier ordre gain unitaire
Signaux
Temps tto
Constante de temps T
Y
X
Le signal de sortie a pour quation :
X(t) = 1 exp( o
T )
avec T la constante de temps du systme.
10.2.3. Intgrateur
Signaux
Temps tto
Tempsintegral
Y
X
Le signal de sortie a pour quation :
X(t) = Y(to+)t to
TiAvec Ti son temps d'intgration.
-
5/26/2018 Regulation
28/33
TSTL Cours de rgulation
2009-2010 page 28/33
10.3. Rglages en boucle ouverte
10.3.1. tape 1
SystmeEchelon Mesures
Y X
Rgulateur
en Manu
Autour du point du fonctionnement, on relve la rponse du systme,
un petitchelon dusignal de sortie Y du rgulateur. Attention ne pas
saturer X.
10.3.2. tape 2 - Mthode simpleSi le procd est stable :
Signaux
Temps tto
l'angle
Y
X
t1 t2
!X !Y
63% de !X
partir des constructions, on calcule : Le gain statique : G =
$X/$Y ; Le retard : R = t1 - t0 ; La constante de temps : T = t2 -
t1.
Si le procd est integrateur :
Signaux
Temps tto
l'angle
Y
X
t1 t2
partir des constructions, on calcule : Le temps intgrale T= t2 -
t1 ; Le retard : R = t1 - t0.
10.3.3.
tape 2 - Mthode BrodaPour un procd stable :
Signaux
Temps tto
Y
X
t1 t2
!X !Y
28% de !X
40% de !X
partir des constructions, on calcule : Le gain statique : G =
$X/$Y ; Le retard : R = 2,8(t1-t0)- 1,8(t2-t0) ; La constante de
temps : T = 5,5(t2-t1).
-
5/26/2018 Regulation
29/33
TSTL Cours de rgulation
2009-2010 page 29/33
10.3.4. tape 3 - Rglages de Dindeuleux partir du rapport T/R, on
dtermine le type de correcteur utiliser l'aide du tableausuivant
:
En fonction du type de procd, stable (tableau stable) ou
instable (tableau instable), oncalcule la valeur des paramtres PID
suivant la structure du rgulateur.Pour un procd stable :
Pour un procd intgrateur :
10.4. Rglages en boucle ferme
10.4.1. Mthode de Ziegler NicholsLe systme est en rgulation
proportionnelle (actions intgrale et drive annules). Ondiminue la
bande proportionnelle Xp jusqu' obtenir un systme en dbut
d'instabilit, lesignal de mesure X et la sortie du rgulateur Y sont
priodiques, sans saturation.
Signaux
Temps t
Y
X!X
!Y
Tc
On relve alors la valeur de la bande proportionnelle Xpc rgle,
ainsi que la priode desoscillations Tc.La mesure de la priode des
oscillations Tc et de Xpc permet de calculer les actions PID
durgulateur l'aide du tableau fourni ci-aprs.
Remarque : Cette mthode a t tablie partir d'exprimentations sur
divers systmes rgler en retenant comme critre un bon amortissement
dans le fonctionnement en rgulation.Elle donne des rsultats
variables, il faut parfois retoucher les rglages pour obtenir
desrsultats de performance (stabilit, prcision, rapidit) plus
proches de ceux dsirs.
T/R
Autre 2 PID 5 PI 10 P 20 TOR
Xp
Ti
Td
P
125GR/T
Maxi
0
PI srie
T
PI //
1,25R
PID srie
118GR/T
T
0,4R
PID //
120GR/(T+0,4R)
1,3GR
0,35T/G
PID mixte
T+0,4R
TR/(R+2,5T)
Xp
Ti
Td
P
125R/TMaxi
0
PI srie
5R
PI //
6,6R2/T
PID srie
118R/T4,8R
0,4R
PID //
111R/T6,6R2/T
0,35T
PID mixte
5,2R
0,4R
Xp
Ti
Td
P
2XpcMaxi
0
PI srie
2,2XpcTc/1,2
PI //
0,02TcXpc
PID srie
3,3XpcTc/4Tc/8
PID //
1,7Xpc84Tc/Xpc7,5Tc/Xpc
PID mixte
Tc/2Tc/8
-
5/26/2018 Regulation
30/33
TSTL Cours de rgulation
2009-2010 page 30/33
10.4.2. Mthode du rgleurC'est une mthode qui chappe au cas
gnral. Le rglage du rgulateur se fait par petit pas.Le systme
fonctionnant en boucle ferme, autour du point de consigne, on
observe larponse de la mesure un chelon de consigne.1) En rgulation
proportionnelle, on cherche la bande proportionnelle correcte en
observant larponse du systme un chelon de consigne :
Temps
Mesure
Xp trop petit
Xp trop grand
Xp correct
2) En rgulation proportionnelle drive, on cherche le temps driv
correct en observant larponse du systme un chelon de consigne :
Temps
Mesure
Td trop petit
Td trop grand
Td correct
3) En rgulation proportionnelle intgrale drive, on cherche le
temps intgral correct enobservant la rponse du systme un chelon de
consigne :
Temps
Mesure
Ti trop petit
Ti trop grand
Ti correct
W
-
5/26/2018 Regulation
31/33
TSTL Cours de rgulation
2009-2010 page 31/33
11. tude de divers types de boucles de rgulation11.1. Boucle
simpleC'est la rgulation que l'on a tudie jusqu' prsent. La mesure
est compare la consigneafin de calculer le signal de commande. Ce
type de rgulation est d'autant moins adapte quele temps mort est
grand.
Rflchir Agir Gnrer
Mesurer + Communiquer
GrandeurRglante
Grandeur mesure
Consigne
Capteur + Transmetteur
ActionneurRgulateur Procd
Perturbation(s)
GrandeurrgleCommande
11.2. Boucle de rgulation cascade (cascade control)Une rgulation
cascade est compose de deux boucles imbriques. Le systme peut
tredcompos en deux sous systmes lis par une grandeur intermdiaire
mesurable. Unepremire boucle, la boucle esclave, a pour grandeur
rgle cette grandeur intermdiaire. Ladeuxime boucle, la boucle
matre, a pour grandeur rgle la grandeur rgle de la rgulationcascade
et commande la consigne de la rgulation esclave.
RgulateurMatre
RgulateurEsclave
Ym = We Sous
Systme1
ConsigneWm
Sous
Systme2
Ye
Mesure Xm
Mesure Xe
On peut utiliser une rgulation cascade dans une rgulation de
niveau. La boucle esclave estla rgulation du dbit d'alimentation du
rservoir.Ce type de rgulation se justifie quand on a une grande
inertie du systme vis vis d'uneperturbation sur la grandeur
rglante, ou sur une grandeur intermdiaire. Il faut d'abord rglerla
boucle interne, puis la boucle externe avec le rgulateur esclave
ferme.
FT
FI
C
LT
LI
CXe
Xm
WmWe
Ym
Ye
-
5/26/2018 Regulation
32/33
TSTL Cours de rgulation
2009-2010 page 32/33
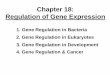
11.3. Boucle de rgulation de rapport (Ratio control)On utilise
une rgulation de rapport quand on veut un rapport constant entre
deux grandeursrgle X1 et X2 (X2/X1 = constante). Dans l'exemple
ci-dessus, la grandeur pilote X1 estutilise pour calculer la
consigne de la boucle de rgulation de la grandeur X2.
Systme1
Systme2
Rapport
Rgulateur
Mesure X2Consigne W2
Mesure X1
On peut utiliser une rgulation de rapport pour tablir le rapport
air/combustible d'unergulation de combustion.Exemple de calcul de
l'oprateur FY :
Dans l'exemple ci-dessus, on suppose que pour avoir une
combustion complte, on doit avoirun dbit d'air cinq fois suprieur
au dbit de gaz : Qair = 5 "Qgaz.L'tendue de mesure du transmetteur
de dbit d'air est rgle sur 0-10 kg/h. Celui du dbit degaz sur 0-4
kg/h.On a donc les relations suivantes entre les signaux des
transmetteurs et les dbits :
0
0
Qair 10
100X1
Kg/h
%
0
0
Qgaz 4
100X2
Kg/h
%
Calculs :
Qair = X110
100et Qgaz =X2
4
100
Qair = 5Qgaz => X110
100= 5X2
4
100=> X2 =X1 0, 5
Ainsi, si l'on considre l'erreur statique de la boucle 2 est
nulle, l'oprateur FY multiplie lamesure de dbit d'air par 0,5 pour
dterminer la consigne de dbit de gaz.Remarque :Le choix de l'tendue
de mesure de chaque transmetteur n'est pas trs judicieuxdans cet
exemple (c'est fait exprs...). On s'attachera dans la pratique
choisir un rglage destransmetteurs entranant la suppression de
l'oprateur FY ("1).
11.4. Boucle de rgulation par partage d'tendue (split-range)On
utilise une rgulation partage d'tendue lorsque l'on dsire contrler
le systme l'aidede deux organes de rglage diffrents. Ces deux
organes de rglage peuvent avoir des effetsantagonistes de type
chaud-froid.
Rgulateur SystmeConsigne
W
Y
Y1
Y2X
+
-
Pour viter les problmes de cavitation, on utilise deux vannes de
rgulation avec descapacits de dbit diffrents (Cv). Une vanne sera
utilise pour contrler les dbitsimportants, l'autre pour les dbits
faibles.
FTFI
C
W
XY
-
5/26/2018 Regulation
33/33
TSTL Cours de rgulation
2009-2010 page 33/33
11.5. Boucle de rgulation prdictive - mixte - priori
(Feedfor-ward)
On utilise la mesure d'une perturbation pour compenser ses
effets sur la grandeur rgle.L'oprateur K2 peut tre un simple gain,
un module avance/retard ou un oprateur pluscomplexe. Une telle
boucle est utile lorsque qu'une perturbation a un poids important
et quela mesure ne varie pas rapidement suite cette
perturbation.
ConsigneW
SystmeRgulateur +
CommandeY
Gain
Perturbation
Mesure X
Dans la rgulation de temprature ci-dessous, la mesure du dbit du
liquide chauff permetd'anticiper la baisse de temprature engendre
par une augmentation du dbit d'eau.
Eau
TT
TI
C
FT
W
Rchauffeur
Y X
Xt