Embed Size (px)
Citation preview
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 640351.
NEOShield-2 Science and Technology for Near-Earth Object Impact Prevention
Grant agreement no: 640351 Project Start: 1 March 2015
Project Coordinator Airbus Defence and Space DE Project Duration: 31 Months
WP 3.1
Deliverable D3.1
Reference mission definition: Mitigation Demonstration
WP Leader ADS-DE Task Leader ADS-DE
Due date M3, 31 May 2015
Delivery date 22.07.2016
Issue 2.1
Editor (authors) ADS-DE, Kilian Engel, Domenico Gerardi, Philipp Voigt, Tobias Ziegler, Simon Delchambre
Contributors ADS-FR, Marc Chapuy, Noela Despre
DMS, Juan-Luis Cano, Miguel Hagenfeld
GMV, Marco di Domenico, Jesús Gil, Matteo Suatoni
DLR, Line Drube
Verified by ADS-DE, Albert Falke
Document Type R
Dissemination Level PU
The NEOShield-2 Consortium consists of:
Airbus DS GmbH (Project Coordinator) ADS-DE Germany Deutsches Zentrum für Luft- und Raumfahrt e.V. DLR Germany Airbus Defence and Space SAS ADS-FR France Airbus Defence and Space Ltd ADS-UK United Kingdom Centre National de la Recherche Scientifique CNRS France DEIMOS Space Sociedad Limitada Unipersonal DMS Spain Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. EMI Germany GMV Aerospace and Defence SA Unipersonal GMV Spain Istituto Nazionale di Astrofisica INAF Italy Observatoire de Paris OBSPM France The Queen’s University of Belfast QUB United Kingdom
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 2/63
Change Record
Issue Date Section, Page Description of Change
1.0 31 May 2015 n/a n/a
1.1 18 May 2016 Chapters 3, 4, 5, 6, 7, 8
Chapter 3: Mission Requirements are now separate for Two-S/C mission and NEOTωIST (sections 3.1 & 3.2), duplications are possible and intended.
Chapter 4: General Requirements are still together for both mission; all requirements that applied only to the Explorer moved to the Explorer Chapter 6.
Chapter 5: Impactor Requirements minor updates
Chapter 6: Explorer Requirements minor updates
Chapter 7: New, NEOTωIST Requirements, mostly duplication of Chap 5, with minor adaptations
Chap 8: Programmatic Requirements, joint for both missions
1.2 13 June 2016 4, 6, & 7 Implemented changes as agreed during MCRR meeting
Implemented changes on NEOTωIST IST GNC received by ADS-FR after MCRR
2.0 28 June 2016 Integrated final set of comments from DLR on NEOTωIST. Final MCRR version of document.
2.1 22 July 2016 Requirement NS2-EXP-060/070/080 updated
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 3/63
Table of Contents
1 Introduction ............................................................................................................................................. 5
1.1 Scope .................................................................................................................................................. 5
1.2 Document Structure ..................................................................................................................... 5
1.3 List of Abbreviations .................................................................................................................... 5
1.4 Applicable Documents ................................................................................................................ 6
1.5 Reference Documents ................................................................................................................. 7
2 Reference Missions ................................................................................................................................ 9
2.1 Two-S/C Kinetic Impactor (KI) Demo Mission ................................................................... 9
2.2 NEOTωIST Mission .................................................................................................................... 11
3 Mission requirements ........................................................................................................................ 13
3.1 Mission requirements – Two-S/C Kinetic Impactor Demo Mission ......................... 13
3.1.1 System level requirements ............................................................................................................... 13
3.1.2 Explorer specific system level requirements ............................................................................ 16
3.1.3 Transfer and orbit requirements ................................................................................................... 18
3.1.4 Accuracy requirements ...................................................................................................................... 20
3.1.5 Launch requirements .......................................................................................................................... 20
3.1.6 Mission phases ....................................................................................................................................... 21
3.2 Mission requirements – NEOTωIST/Itokawa Mission .................................................. 22
3.2.1 Primary objectives ............................................................................................................................... 22
3.2.2 Earth safety & target NEO ................................................................................................................. 23
3.2.3 Mission architecture ............................................................................................................................ 24
3.2.4 Post-impact measurements .............................................................................................................. 25
3.2.5 Impact event observations ............................................................................................................... 25
3.2.6 Transfer and encounter trajectory requirements ................................................................... 26
3.2.7 Accuracy requirements ...................................................................................................................... 28
3.2.8 Launch requirements .......................................................................................................................... 28
3.2.9 Mission phases ....................................................................................................................................... 28
4 General Spacecraft Requirements ................................................................................................. 30
4.1 Design requirements ................................................................................................................ 30
4.2 AOCS/GNC requirements ......................................................................................................... 31
4.3 Thermal control and structure requirements ................................................................. 32
4.4 Communication subsystem requirements ........................................................................ 32
4.5 Power subsystem requirements .......................................................................................... 32
4.6 Command and data handling subsystem requirements .............................................. 32
4.7 Environment requirements ................................................................................................... 32
5 Impactor Spacecraft Requirements .............................................................................................. 34
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 4/63
5.1 GNC/AOCS subsystem requirements .................................................................................. 34
5.2 Propulsion subsystem requirements ................................................................................. 38
5.3 Specific design requirements ................................................................................................ 38
6 Explorer Spacecraft Requirements ............................................................................................... 39
6.1 Design requirements ................................................................................................................ 39
6.2 GNC/AOCS subsystem requirements .................................................................................. 39
6.3 Propulsion subsystem requirements ................................................................................. 48
6.4 Specific design requirements ................................................................................................ 49
7 NEOTωIST Spacecraft Requirements ........................................................................................... 50
7.1 GNC/AOCS subsystem requirements .................................................................................. 50
7.2 Propulsion subsystem requirements ................................................................................. 54
7.3 Specific design requirements ................................................................................................ 54
8 Programmatic & Standards ............................................................................................................. 56
8.1 TRL and Availability .................................................................................................................. 56
8.2 Schedule ........................................................................................................................................ 56
8.3 Cost .................................................................................................................................................. 56
8.4 Standards ...................................................................................................................................... 56
9 Applicability of requirements for the reference mission scenarios ................................. 58
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 5/63
1 Introduction
1.1 Scope
The present document is the output of NEOShield-2 work package 3.1, which represents the reference mission definition and the mission requirements definition. This document is identified as D3.1 and contains the work accomplished during the work package elaboration. The internal structure of D3.1 is outlined in the following section.
There are two scenarios identified as reference mission:
Two-S/C Kinetic Impactor (KI) Demo Mission:
This scenario is equal to the Kinetic Impactor Demonstration Mission from NEOShield with the NEO 2001 QC34 as target. It consists of two S/C (Explorer and Impactor) which are launched in a shared launch scenario. The main task of the Impactor is to transfer a momentum to the NEO via impact and thus to change the orbit of the NEO. The main task of the Explorer is to measure the NEO (e.g. mass, shape, rotational state) and to observe the impact and to support the measurement of the change of the NEO orbit.
NEOTωIST Mission:
This scenario was previously called Itokawa Impactor Demo mission. It consists of one S/C (Impactor) with the main task to transfer a momentum to the target asteroid, Itokawa, via impact and thus to change the rotational state of Itokawa. This change of the rotational state can be observed from ground due to the change of the light curves. In addition the Impactor shall carry a small science module (based on CubeSat standard) which shall be released before impact to support the observation of the impact.
1.2 Document Structure
Chapter 2 contains the description of the reference missions.
Chapter 3 contains the high level mission requirements. Some are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission; some are applicable only for the Two-S/C KI Demo Mission. It is explicitly stated if a requirement is not applicable for the NEOTωIST Mission.
Chapter 4 contains general spacecraft requirements which are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission.
Chapter 5 contains spacecraft requirements for the Impactor which are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission with one exception which is applicable only for the NEOTωIST Mission.
Chapter 6 contains the spacecraft requirements for the Two-S/C KI Demo Mission. They are only applicable for the Two-S/C KI Demo Mission and not for the NEOTωIST Mission.
Chapter 8 contains requirements w.r.t. programmatic and standards which are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission.
Chapter 9 contains a table which lists all requirements and shows which are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission.
1.3 List of Abbreviations
AD Applicable Document
ADCS Attitude Determination and Control System
AOCS Attitude and Orbit Control System
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 6/63
APE Absolute Pointing Error
AU Astronomical Unit
COG Centre of Gravity
COM Centre of Mass
CPU Central Processing Unit
ESD Electrostatic Discharge
FDIR Fault-Detection, Isolation and Recovery
FOV Field of View
GA Grant Agreement
GNC Guidance, Navigation and Control
KI Kinetic Impactor
LOS Line of Sight
MOID Minimum Orbit Intersection Distance
MPE Mean Pointing Error
NEO Near Earth Object
PHO Potential Hazardous Object
RD Reference Document
RPE Relative Pointing Error
RSE Radio Science Experiment
S/C Spacecraft
SNR Signal to Noise Ratio
TBC To Be Confirmed
TBD To Be Defined
TRL Technology Readiness Level
WP Work Package
1.4 Applicable Documents
[AD1] List of ESA Approved Standards; ESSB-AS; Issue 5.0; August 2014; European Space Agency; Noordwijk, Netherlands.
[AD2] Soyuz at the Guiana Space Centre User’s Manual; Issue 2.0; March 2012; Arianespace; Evry-Courcouronnes, France
[AD3] Vega User’s Manual; Issue 4.0; April 2014; Arianespace; Evry-Courcouronnes, France
[AD4] Falcon 9 User’s Manual; Issue 1.1; 2009, SpaceX; USA
[AD5] Margin philosophy for science assessment studies; SRE-PA/2011.097; Issue 1.3; 15-06-2012; European Space Agency; Noordwijk, Netherlands.
[AD6] NEOShield-2: “Science and Technology for Near-Earth Object Impact Prevention”, Grant Agreement no. 640351, 28.10.2014.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 7/63
1.5 Reference Documents
[RD1] Guidelines for the use of TRLs in ESA programmes; ESSB-HB-E-002; Issue 1.0; 21 August 2013; European Space Agency; Noordwijk, Netherlands.
[RD2] Annex G. Technology readiness levels (TRL); General Annex G of the work programme; H2020 2014-2015; EC/EU; http://ec.europa.eu/research/participants/data/ref/h2020/wp/2014_2015/annexes/h2020-wp1415-annex-g-trl_en.pdf
[RD3] ESSB-HB-E-002; Issue 1.0; 21 August 2013; European Space Agency; Noordwijk, Netherlands.
[RD4] Deliverable D8.1 from NEOShield: Requirements on NEO Target Selection; Issue 1.1; 19-06-2012; Astrium GmbH; Friedrichshafen, Germany.
[RD5] Deliverable D8.2 from NEOShield: NEOShield Kinetic Impactor Demonstration Mission - System Design Report; Issue 1draft; Date 11-12-2013; Astrium GmbH; Friedrichshafen, Germany.
[RD6] Deliverable D5.1 from NEOShield: Report on the dynamical- and physical-property requirements for NEOs to be used as targets in mitigation demo missions; Issue 1; 21-05-2013; Deutsches Zentrum für Luft- und Raumfahrt; Berlin, Germany.
[RD7] Deliverable D5.2 from NEOShield: List of potential target NEOs and their properties relevant to mitigation demo missions; Issue 1; 30-11-2012; Queen's University Belfast; Belfast, United Kingdom.
[RD8] Deliverable D5.3a from NEOShield: Mitigation demonstration mission target NEOs; Issue 2; 01-11-2013; Institut de mécanique céleste et de calcul des éphémérides; Paris, France.
[RD9] Deliverable D5.3b from NEOShield: Prioritized target suggestions required for specialized final mitigation demo-mission designs, Issue 1.0; 29-05-2013; Queen's University Belfast; Belfast, United Kingdom.
[RD10] Deliverable D6.2 from NEOShield: Impactor GNC Technologies; Issue 1; 29-03-2014, Astrium SAS.
[RD11] Uesugi, K.T.: Space engineering spacecraft (MUSES) program in ISAS featuring its latest mission "Hayabusa", Recent Advances in Space Technologies, 2003
[RD12] Elecnor/Deimos: Physical properties of NEOSHIELD targets in relation to potential observer orbits, NEOShield internal project document NEOSHIELD-DMS-TEC-MEM33-10-E, 2014
[RD13] Deliverable D6.3 from NEOShield: Orbiter GNC Technologies; Issue 4; 19-12-2014, Deimos Space.
[RD14] ESA pointing error engineering handbook, ESSB-HB-E-003, Issue 1.0; 19 July 2011; European Space Agency.
[RD15] ECSS Space Engineering, Control Performance, ECSS-E-ST-60-10C, Issue 1.0, 15 November 2008, European Cooperation for Space Standardization
[RD16] Phase A of a Near Earth Object Mission - Don Quijote: Orbiter Design Report, DQPhA-ASG-ENG04, Issue 2.0, 28 May 2007, Astrium GmbH
[RD17] BepiColombo Project: MPO Pointing Budgets and Pointing Allocation, BC-ASD-TN-00041, Issue 9.0, 02.12.2014, Airbus DS GmbH
[RD18] D.9.6b: Itokawa Impactor Demo Mission, NEOShield-D9.6b, Issue 1.0, Project Report NEOShield, 31.05.2015, NEOShield Consortium

NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 8/63
[RD19] Memorandum on β determination accuracy, NEOShield-2-IMCCE-NEOTωIST-MEM1, NEOShield-2 internal memorandum, 19.10.2015, Eggl et al., Obs. Paris/IMCCE
[RD20] Drube, L, Harris, A.W., Engel, K., Falke, A., Johann, U., Eggl, S., Cano, J.L., Ávila, J.M., Schwartz, S.R., Michel, P., The NEOTωIST mission (Near-Earth Object Transfer of angular momentum spin test), Acta Astronautica 127, (2016), 103–111
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 9/63
2 Reference Missions
2.1 Two-S/C Kinetic Impactor (KI) Demo Mission
One option to deflect a NEO is the deflection by a Kinetic Impactor spacecraft hitting the Potentially Hazardous Objects (PHO) and transferring linear momentum to it. By this momentum transfer the orbit of the NEO can be affected and its separation from the Earth be increased during its close encounter.
A detailed analysis of this scenario has been done in [RD5] and is the baseline for the following reference mission description.
Using a Kinetic Impactor, the magnitude of the achieved NEO deflection is difficult to predict, in particular due to the unknown momentum imparted by ejecta produced by the kinetic impact. A sufficiently precise orbit determination of a NEO from Ground is difficult and may take years. Therefore an explorer spacecraft characterising the NEO before the impact, observing the impact and measuring the deflection provides an added value for a Kinetic Impactor mission.
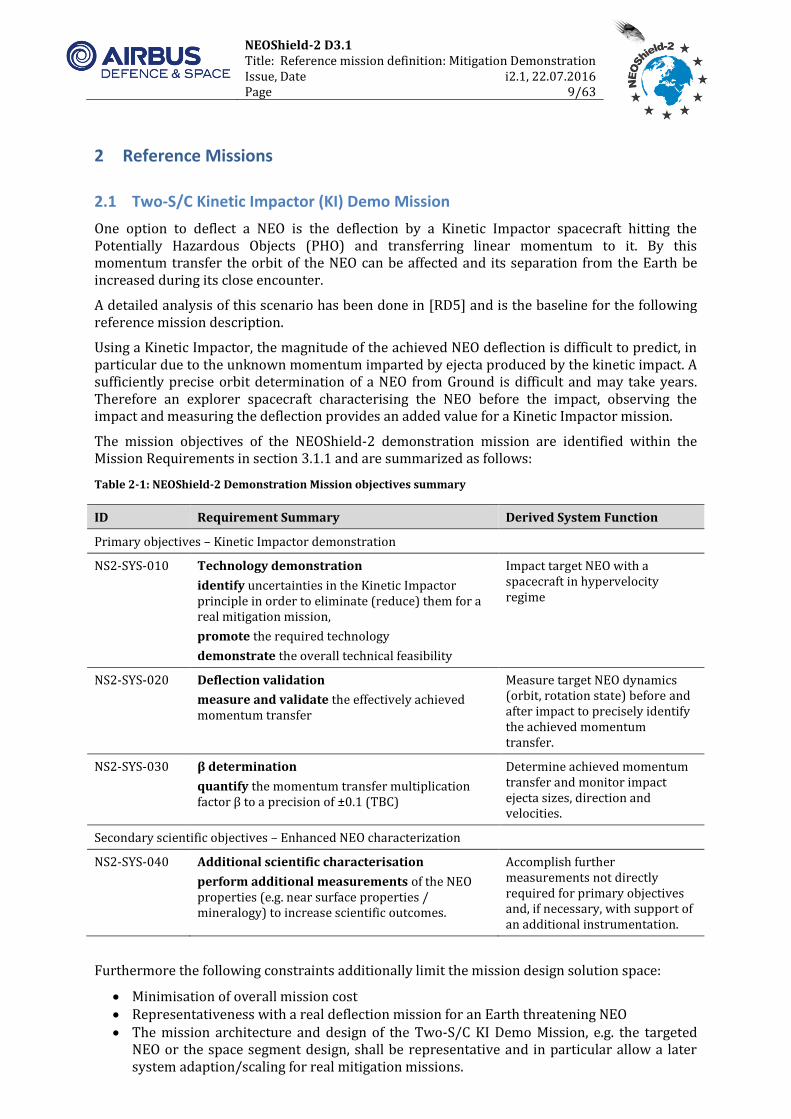
The mission objectives of the NEOShield-2 demonstration mission are identified within the Mission Requirements in section 3.1.1 and are summarized as follows:
Table 2-1: NEOShield-2 Demonstration Mission objectives summary
ID Requirement Summary Derived System Function
Primary objectives – Kinetic Impactor demonstration
NS2-SYS-010 Technology demonstration
identify uncertainties in the Kinetic Impactor principle in order to eliminate (reduce) them for a real mitigation mission,
promote the required technology
demonstrate the overall technical feasibility
Impact target NEO with a spacecraft in hypervelocity regime
NS2-SYS-020 Deflection validation
measure and validate the effectively achieved momentum transfer
Measure target NEO dynamics (orbit, rotation state) before and after impact to precisely identify the achieved momentum transfer.
NS2-SYS-030 β determination
quantify the momentum transfer multiplication factor β to a precision of ±0.1 (TBC)
Determine achieved momentum transfer and monitor impact ejecta sizes, direction and velocities.
Secondary scientific objectives – Enhanced NEO characterization
NS2-SYS-040 Additional scientific characterisation
perform additional measurements of the NEO properties (e.g. near surface properties / mineralogy) to increase scientific outcomes.
Accomplish further measurements not directly required for primary objectives and, if necessary, with support of an additional instrumentation.
Furthermore the following constraints additionally limit the mission design solution space:
Minimisation of overall mission cost Representativeness with a real deflection mission for an Earth threatening NEO The mission architecture and design of the Two-S/C KI Demo Mission, e.g. the targeted
NEO or the space segment design, shall be representative and in particular allow a later system adaption/scaling for real mitigation missions.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 10/63
For the demonstration mission as target the Near Earth Object (NEO) 2001 QC34 has been selected. Driving criteria for this selection were
Avoid any increase in planetary threat, i.e. avoid any reduction in the NEO's Minimum Earth Encounter Distance due to the deflection action even in view of uncertainties
Allow for deflection validation with adequate signal-to-noise ratio (SNR ≥ 10)
Both criteria are fulfilled for the selected target which is an Apollo-type NEO (Earth crosser) that has a diameter of about 240 m.
The mission consists of two spacecraft, an Impactor and an Explorer. The Explorer is a reconnaissance spacecraft that shall characterize the target NEO prior to the impact in terms of ephemeris data, rotational state, surface geometry and composition. The impact itself and the ejecta produced are observed by the Explorer as well. Finally after the impact the Explorer will determine the change in ephemeris data of the NEO and thus allows quantification of the momentum transfer and the deflection resulting from the impact. This is important information for a Kinetic Impactor mission in a contingency case.
Both spacecraft, Impactor and Explorer are launched together as a stack on a single Soyuz-Fregat from Kourou. In order to increase the momentum transferred to the selected target NEO, the launcher upper stage (Fregat) remains connected to the Impactor throughout the mission. This means that Impactor (mass 340 kg) and Fregat (mass 902 kg) crash into the NEO as a composite with a total mass of 1242 kg. The impact velocity amounts to 9.6 km/s. The impact accuracy in terms of centre of mass offset achievable with the proposed GNC system is only about 50 m and thus excellent bearing in mind that the sun phase angle of the selected target at impact is rather unfavourable so that most of the NEO is in shade when looked at from the approaching Impactor.
The mission design elaborated assumes that the Explorer uses three swing-bys supported by chemical propulsion and solar-electric propulsion for the main orbit manoeuvres and ensures that it is reaching the target NEO 5.3 years after launch. With the baseline of NEOShield (Area to mass ratio = 0.029 m^2/kg, see [RD5]) at a distance of 1.13 AU with a mean NEO mass of 1.54e10 kg (see [RD12]) several scenarios in the NEO vicinity are possible:
Co-flying orbit: assuming that the gravity of the NEO is 1/100 or less of the solar radiation pressure the distance NEO to S/C yields at least 32 km.
Hovering: Gravity 10 times larger than solar radiation pressure to 100 times smaller than solar radiation pressure: the distance NEO to S/C yields 1 km to 32 km
Photo-gravitational stable orbit: Gravity 4 times larger than the solar radiation pressure: the distance NEO to S/C yields 1.6 km (Remark: gravity must be at least 3 times larger than the solar radiation pressure otherwise the orbit is not stable)
The Impactor uses chemical propulsion and as well three swing-bys and will arrive at the NEO more than one year later than the Explorer, thus leaving sufficient time for a detailed characterization of the NEO prior to the impact. Obviously both spacecraft have to fly on vastly different trajectories to accomplish that. They will remain mated however until shortly prior to their first Earth swing-by manoeuvre occurring roughly one year after launch.
The total wet mass of Impactor (without Fregat) and Explorer including all margins amounts to 1238 kg, whilst the Soyuz-Fregat lift performance allows reaching Earth escape velocity with a payload mass of 1625 kg. There is consequently considerable further room for increasing the Impactor mass and thus its deflection capability.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 11/63
Table 2-2: Summary of mission baseline
S/C Impactor & Explorer
Launch Shared launch with Soyuz-Fregat from Kourou
Launcher upper stage stays connected with Impactor
Launch wet mass
Explorer: 740.4 kg
Impactor: 497.5 kg
Total wet mass: 1237.9 kg
Launcher Capability Soyuz Fregat: 1625 kg
Transfer Explorer and Impactor on similar trajectory until 1st swing by in year 1
Explorer: chemical and solar-electric propulsion, 3 Swing-by, 5.3 years transfer time
Impactor: chemical propulsion, 3 Swing-by, >6.3 years transfer time
Impact Impact velocity: 9.6 km/s
Centre of mass offset (impact accuracy): 50 m (25 m as a goal)
Impact mass: Impactor + launcher upper stage (902 kg) = 1242 kg
2.2 NEOTωIST Mission
An alternative mission concept is the “NEOTωIST Mission” with the goal of presenting a reduced cost option while maintaining a large part of the mission utility. The mission objectives are the same as for the “Two spacecraft Kinetic Impactor demonstration mission” in section 2.1, except for any secondary objectives.
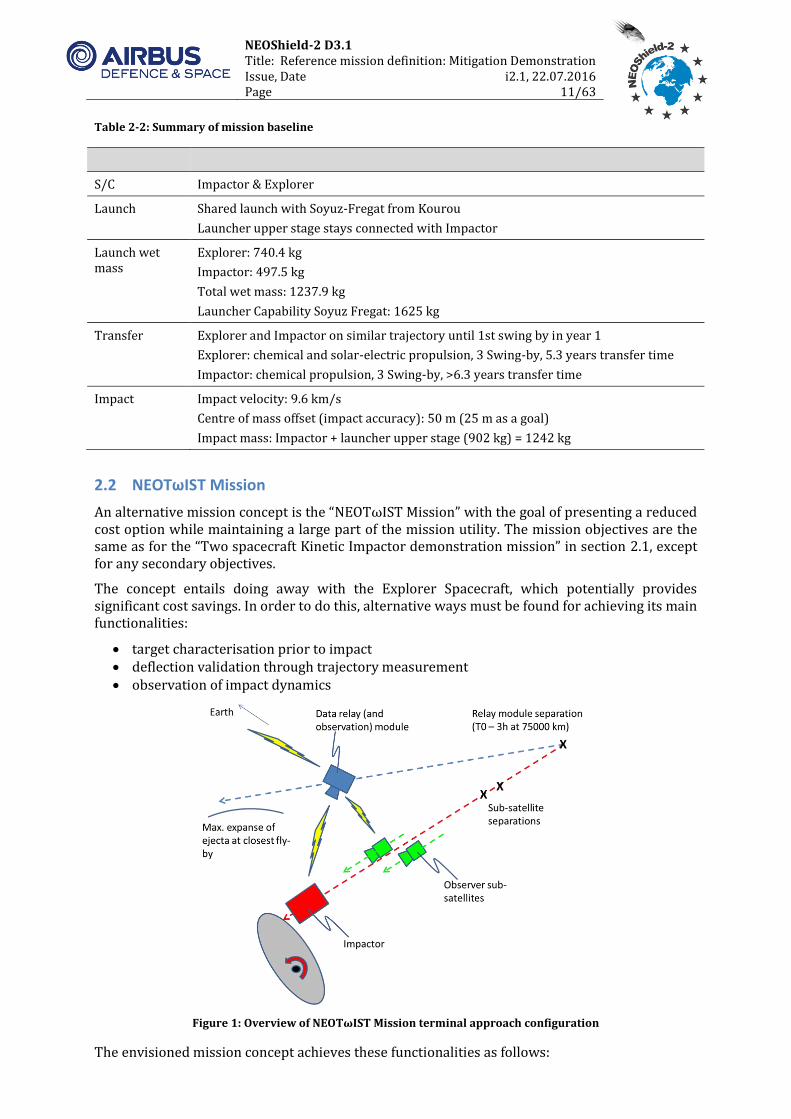
The concept entails doing away with the Explorer Spacecraft, which potentially provides significant cost savings. In order to do this, alternative ways must be found for achieving its main functionalities:
target characterisation prior to impact deflection validation through trajectory measurement observation of impact dynamics
Figure 1: Overview of NEOTωIST Mission terminal approach configuration
The envisioned mission concept achieves these functionalities as follows:

NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 12/63
Target characterisation is achieved by selecting an object that has been visited by a previous mission. In this case Itokawa is proposed which has been characterised by the Hayabusa mission sufficiently well to allow reliable impactor targeting.
Deflection validation, or rather the validation of the impulse transfer is achieved by means impacting the target far from the centre of mass and measuring the resulting spin rate change. Above a certain threshold this can be achieved by brightness curve measurements from terrestrial observations. Also with regard to this aspect Itokawa is an attractive target. It significantly elongated shape means it shows significant variations in brightness as it rotates, thus facilitating rotation period measurement. Further, the shape allows impacting the target relatively far from the centre of mass, thus achieving a larger spin change for a given impact impulse.
Observation of impact dynamics (ejecta and crater formation) is important for the purpose of better characterising the beta-factor (effectiveness of impulse augmentation through ejecta). This is achieved by means sub-satellites and potentially observations from a fly-by module. The fly-by module separates from the impactor before terminal approach to ensure a safe fly-by. The sub-satellites are ejected from the impactor at a later stage. Their possible destruction through impact is accepted. The fly-by module also functions as a data buffer and data relay node for payload data and telemetry from the impactor and the sub-satellites.
Figure 1 gives a schematic overview of the concept during final approach to the target.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 13/63
3 Mission requirements
The requirements in this section are applicable for the Two-S/C KI Demo Mission and the NEOTωIST Mission if not explicitly stated otherwise.
3.1 Mission requirements – Two-S/C Kinetic Impactor Demo Mission
The requirements in this chapter are only applicable to the Two-S/C Demo Mission, despite the fact that identical requirements may be listed in the Mission requirements section of the NEOTωIST mission. Possible duplications are meant to enable separate evolution and later separation.
3.1.1 System level requirements
3.1.1.1 Primary objectives
The NEOShield-2 demonstration mission is characterized by the following primary objectives:
NS2-SYS-010//: Technology demonstration
The demonstration mission shall identify uncertainties in the Kinetic Impactor principle in order to
eliminate (reduce) them for a real mitigation mission, promote the required technology and
demonstrate the overall technical feasibility.
Rationale:
The accomplished NASA Deep Impact mission shows characteristic parallels to a Kinetic
Impactor mitigation mission. Their demonstrated results concerning the KI principle are in-line
with the state-of-the-art kinetic impact principle theories, related empirical tests and impact
modelling simulations performed on ground.
A complete demonstration of a KI mission under representative conditions has never been
accomplished, although some technological building blocks required to implement a KI mission
are already available and well maturated through the different commercial and institutional
satellite development projects of the last decades.
However, there are still some technological uncertainties, which need to be eliminated before the
need of a real NEO mitigation mission becomes threatening. Further technology development is
necessary, particularly in the field of the Impactor GNC and the Explorer reconnaissance
capabilities (e.g. 3D reconstruction) as well as the high level of autonomy of both spacecraft.
Most of these aspects will only be investigated and developed to a proven design through the
implementation of a demonstration mission. Ground based analogies cannot provide the
confidence and progress needed to carry out a real life mitigation mission.
NS2-SYS-020// : Deflection validation
The demonstration mission shall measure and validate the effectively achieved momentum
transfer.
Rationale:
In-line with heritage from previously accomplished impact missions (e.g. NASA's Deep Impact)
various models to evaluate the underlying physical mechanisms have been developed and were
validated by different empirical ground based high velocity tests.
However, a representative and real scale impact and first-hand data is needed to validate the
effectively achieved momentum transfer (i.e. the β coefficient, the momentum transfer
multiplication factor) and to deepen the knowledge on the dynamical behaviour.
NS2-SYS-030// : β determination
The NEOShield-2 demonstration mission shall quantify the momentum transfer multiplication
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 14/63
factor β to a measurement uncertainty of ±0.1
Rationale:
The magnitude of β is expected to be in the range between 1 and 5. A minimal measurement
precision of 0.1 is therefore judged adequate and was already baseline in NEOShield (see [RD5]).
One important aspect often misunderstood is reminded hereafter. For a cost effective demo
mission the overall deflection will be small due to the mass ratios between the spacecraft and the
NEO:
A real-life mitigation mission realizes the goal to deflect the NEO sufficiently to make sure it
misses the Earth (and to avoid any later keyhole issues).
A demonstration mission implements the objective to deflect the target NEO sufficiently to be able
to characterise the process and to measure the effectively achieved deflection (to quantify the
effective momentum transfer).
A large (and expensive) deflection is thus not inherently necessary for a demonstration mission
providing that the impact effects are measurable.
Note:
The definition of momentum transfer multiplication factor β is provided in the System Design
Report [RD5]
3.1.1.2 Secondary scientific objectives – Enhanced NEO characterisation
Secondary mission goals shall be addressed only if the impact on the total mission costs is minimal and without impacting the performance and reliability of the primary objectives.
NS2-SYS-040// : Additional scientific characterization
As a goal, the mission shall perform additional measurements of the NEO properties (e.g. near
surface properties/mineralogy) to increase scientific outcomes.
Rationale:
Accomplish further measurements not directly required for primary objectives and, if necessary,
with support of an additional instrumentation. The chance of flying a spacecraft to a NEO should
be taken to maximize scientific feedback providing that the impact on costs remains minimal and
the robustness of the primary mission remains untouched.
Note 1:
No complex additional instruments shall be considered to achieve this goal; the related delta costs
shall remain minimal.
Note 2:
This is not applicable for an NEOTωIST Mission.
3.1.1.3 Earth safety & target NEO
The selection of the target for the NEOShield-2 demonstration mission follows the comprehensive NEO target selection process which was performed in NEOShield with contribution of several NEOShield partners. The overall process is documented by [RD5] and briefly outlined in the following.
In [RD2] the physical and dynamical properties driving the mission design were specified from a technical point of view, while [RD6] in complementary manner summarizes the requirements to the target NEO from a more scientific perspective.
Based on these requirements, which assure mission feasibility and its representativeness, a list of potential targets has been identified and documented in [RD7]. Based on these potential targets a prioritized candidates target list for demonstration mission designs was generated in [RD9] under consideration of orbital parameters and physical knowledge, which is then fed into a detailed mission analysis under aspects of target selection. The results are documented by [RD5]. Furthermore a Post Mitigation Impact Probability Analysis [RD8] has been accomplished for all identified missions to the candidate targets in order to evaluate the risks to Earth deduced by the kinetic impact mitigation attempt.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 15/63
Finally the Kinetic Impactor demonstration target NEO (and a backup target) has been selected as specified below.
NS2-SYS-050// : Ensure Earth safety
The selection of the NEO target and the associated mission design shall ensure that the NEO
minimum encounter distance to Earth, resulting from an impact deflection, is greater than 10 mean
lunar distances (10 x 384,400 km) until the year 2125 even in the worst case, on the basis of
available knowledge of mission parameters.
Rationale:
The stated minimum encounter distance of 10 mean lunar distances ensures that even in the worst
case the target NEO will not become a hazard to the Earth for many generations to come. Once the
mission design has become better defined, detailed analysis of the possible post-deflection-attempt
evolution of the orbit shall be conducted for at least 100 years into the future to confirm that the
worst-case impact probability is well below the background impact hazard, as defined on the
Palermo scale.
NS2-SYS-060// : Target NEO
The Two-S/C KI Demo Mission shall target the NEO 2001 QC34.
Rationale:
2001 QC34 is finally selected as target NEO for the Two-S/C KI Demo Mission by a detailed
target selection process documented by the System Design Report [RD5].
3.1.1.4 Mission architecture
NS2-SYS-070// : S/C architecture
The Two-S/C KI Demo Mission shall consist of two separate spacecraft, a reconnaissance
spacecraft, called Explorer, and a kinetic impacting spacecraft, called Impactor.
Rationale:
For the Two-S/C KI Demo Mission the Explorer spacecraft is required to provide measurements of
the NEO orbital parameter evolution, introduced by the impact, with the required accuracy for β
determination.
Note:
The Impactor spacecraft is the vehicle that after an interplanetary cruise with minimum ground
support performs autonomous terminal guidance and navigation manoeuvres towards the target
NEO, relaying engineering GNC data and images of the target to the ground station and/or the
Explorer spacecraft for relaying purposes and impacting at very high relative speed (in the order of
10 km/s) against the NEOs surface. The Impactor spacecraft will demonstrate the autonomous
GNC capability based on visual navigation and provide the deflection impulse to the NEO which
will be measured and characterised by the Explorer and/or the ground station afterwards.
The Explorer spacecraft shall be the reconnaissance vehicle for the Two-S/C KI Demo Mission
that performs rendezvous with the target NEO and measures (as a minimum) the orbital
parameters with high precision, the mass, size and geometry of the NEO before and after impact to
assess the momentum transfer.
There will be no Explorer spacecraft for the NEOTωIST Mission.
3.1.1.5 Post-impact measurements
NS2-SYS-080// : Determine NEO orbit after impact
The determination of the NEO orbital parameters after impact shall be done with a precision of the
NEO heliocentric velocity at the impact location of at least 0.01 cm/s.
Rationale:
Required to determine the effectively achieved momentum transfer and to determine the
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 16/63
momentum multiplication factor β. The value of 0.01 cm/s is derived from the fact that the
precision of the NEO orbit determination needs to be higher than the minimum imparted Δv
quantified in NS2-SYS-280. In addition this value is state of the art RSE performance as shown in
[RD16].
NS2-SYS-090// : Determine NEO rotational state after impact
A determination of the NEO rotational state (axis, direction and period) after the impact shall be
done.
Rationale:
Required to determine the effectively achieved deflection capability.
3.1.2 Explorer specific system level requirements
None of the requirements in this section are applicable for the NEOTωIST Mission.
NS2-SYS-100// : Pre-Impact reconnaissance duration
The Pre-Impact Measurements phase including the required NEO characterisation shall be
completed before arrival of the Impactor.
Rationale:
The NEO dynamical state and geometry has to be characterised before and after the impact to be
able to determine the change introduced by the kinetic impact. The first set of measurements
therefore has to be gathered before the impact.
Note 1:
The time-span needed to perform the initial characterisation is currently expected to be around 6
months (including sufficient margin).
NS2-SYS-110 // : Determine NEO size and geometry
The Explorer shall support determination of the NEO size and its three dimensional geometry
before the impact.
Rationale:
The size and the geometry of the NEO are important inputs to the Impactor GNC and will also
support to evaluate the results of the impact.
Note:
The current requirement shall make sure that these characterizations are requested on a high level.
An analysis in WP 4 shall enable a break down of more detailed requirements with specific values
on lower level.
NS2-SYS-120 // : Determine NEO rotational state
The Explorer shall support determination of the NEO rotational state (axis, direction and period)
before the impact.
Rationale:
The rotational state of the NEO is an important input to the Impactor GNC and will also support to
evaluate the results of the impact.
Note:
The current requirement shall make sure that these characterizations are requested on a high level.
An analysis in WP 4 shall enable a break down of more detailed requirements with specific values
on lower level.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 17/63
NS2-SYS-130 // : Determine NEO orbit before impact
The Explorer shall support determination of the NEO orbital parameters before impact with a
precision of the NEO heliocentric velocity at the impact location of at least 0.01 cm/s.
Rationale:
A detailed knowledge of the NEO orbital parameters before (and after) the impact is essential to
characterise β with an accurate precision.
The value of 0.01 cm/s is derived from the fact that the precision of the NEO orbit determination
needs to be higher than the minimum imparted Δv quantified in NS2-SYS-280. In addition this
value is state of the art RSE performance as shown in [RD16].
NS2-SYS-140 // : Determine NEO mass
The Explorer shall support determination of the NEO mass.
Rationale:
An accurate knowledge of the NEO mass is a prerequisite for a successful determination and
precision of the β coefficient.
Note 1:
The mass can be determined before or after the impact. Two measurements before and after are not
necessary as the difference due to the impact is estimated to be negligible.
Note 2:
This requirement is not applicable for an NEOTωIST Mission. For Itokawa the mass is already
known.
NS2-SYS-150 // : Safe location during impact
Prior to impact the Explorer shall move to a safe location in order to avoid any damage originating
from the impact.
Rationale:
As the Explorer spacecraft is still needed to assess the NEO after the impact, it must be protected
from impact ejecta.
NS2-SYS-160 // : Explorer as beacon
As a goal, the Explorer should function as a beacon (e.g. radio frequency beacon) to aid the
Impactor in its approach.
Rationale:
A beacon could be an interesting solution to aid the Impactor in its far approach in case the NEO is
difficultly visible (e.g. high phase angles).
Note:
It needs to be analysed, whether this functionality is required and what the impact on the system
design is.
NS2-SYS-170// : Impact observation
The Explorer shall observe the impact and the resulting ejecta from its safe location via cameras
and provide the monitoring data to ground.
Rationale:
Observing the impact with the Explorer has two benefits for the mission:
On the one hand this observation is a backup/redundant solution to the imaging performed with the
Impactor to determine the exact impact location (see NS2-IMP-090).
On the other hand observing the ejecta will provide valuable insight into the dynamical processes
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 18/63
and aid in determining β.
Note:
Generally higher imaging frequency is favoured over high resolution. Explorer shall be in Safe
Position as addressed in NS2-SYS-250.
NS2-SYS-180// : Data relay for Impactor
As a goal, the Explorer should function as a backup data relay for the Impactor during this phase.
Rationale:
It might be difficult to maintain an antenna pointing towards Earth with the Impactor while
ensuring impact visual based navigation pointing (camera pointed towards asteroid). Putting
instead an antenna axis in the same direction as the boresight axis of the camera will ensure it is
pointed towards the Explorer. So it could be easier to use the Explorer as relay than direct Earth
link.
Furthermore, the data for the last hundreds of seconds will be the most interesting one.
Transmitting sufficient data to Earth before the Impactor is destroyed might require a high gain
antenna for sufficient link while the RF link to reconnaissance S/C, with shorter distance and less
free space loss, could be more efficient, even with a lower-grade and less costly antenna (e.g.
medium gain antenna). This has to be confirmed depending on link budget analyses, but having
this simple goal to store data and have sufficient time to transmit it to Earth even after the
Impactor is destroyed cannot be harmful.
Note:
This is only a goal because it is not mandatory for mission success.
NS2-SYS-190// : Determine NEO rotational state after impact
The Explorer shall support determination of the NEO rotational state (axis, direction and period)
after the impact.
Rationale:
Required to fulfil NS2-SYS-090.
NS2-SYS-200// : Determine NEO surface porosity
As a goal, the Explorer shall support determination of the surface porosity of the NEO.
Rationale:
The surface porosity of the target NEO needs to be known to classify the impact effects and to
allow retrospective modelling of the process.
Note:
As for the mass, this measurement can be taken before or after the impact depending on the
mission timeline.
3.1.3 Transfer and orbit requirements
NS2-SYS-210// : Maximum Swing By
The number of swing-by manoeuvers during the interplanetary cruise shall be constrained to a
maximum of 3 swing-by manoeuvers per spacecraft.
Rationale:
Limits the mission analysis solution space.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 19/63
3.1.3.1 Explorer transfer and orbit requirements
NS2-SYS-220// : Explorer cruise time
The interplanetary cruise time for the Explorer spacecraft from Earth to the target NEO shall be
constrained to a maximum of 6 years.
Rationale:
To constrain the mission analysis solution space and limit the overall mission duration.
NS2-SYS-230// : Initial characterization duration
The time interval between Explorer spacecraft arrival at the target NEO and the impact of the
Impactor spacecraft utilized for an initial NEO characterization shall be at least 6 month.
Rationale:
Time interval dedicated for reconnaissance activities including precise NEO orbit determination
and NEO geometry mapping.
NS2-SYS-240// : Explorer Operational Baseline
The proximity operations guidance scenario of the Explorer shall support the measurements of
mass, size, orbit, shape, rotational state of the NEO before and after impact as required in NS2-
SYS-110 to NS2-SYS-140 and NS2-EXP-190 and NS2-EXP-200.
Rationale:
Constraints to be considered here are the close spacecraft positions wrt. NEO needed for
measurements/imaging on the one hand and on the other hand any possible collision with the NEO
needs to be avoided.
NS2-SYS-250// : Explorer Safe Position
Prior to impact observation phase, the S/C shall have a safe position at 100 km away from the
NEO relative to the NEO surface. The position shall ensure the observation of the impact (e.g.
w.r.t. phase angle).
Rationale:
The required distance ensures that the Explorer is not hit by ejecta during and after the impact and
is the baseline for the OSIRIS-Rex mission and the AIDA mission
Note 1:
The safe position shall ensure a minimum collision probability with the ejecta.
3.1.3.2 Impactor transfer and orbit requirements
NS2-SYS-260// : Impactor cruise time
The interplanetary cruise time for the Impactor spacecraft from Earth to the target NEO shall be
constrained to a maximum of 8 years.
Rationale:
To constrain the mission analysis solution space and limit the overall mission duration.
NS2-SYS-270// : Impact velocity range
The relative velocity between the Impactor and the target NEO at impact shall be between 5 km/s
and 15 km/s.
Rationale:
A minimum velocity is imposed to remain representative with high velocity impact physics; the
upper value is a technical constraint for a robust demonstration with current technology.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 20/63
NS2-SYS-280// : Imparted Δv minimum
The tangential Δv imparted to the NEO at the impact location should be at least 0.04 cm/s.
Rationale:
For mission success evaluation, the deflection must be measurable and verifiable thus the impulse
transferred must be larger than the measurement error. A rough first estimation of the impulse
transferred by the Impactor is determined by ∆𝑣 =𝑚𝐼𝑚𝑝𝑎𝑐𝑡𝑜𝑟
𝑚𝑁𝐸𝑂∆𝑣𝐼𝑚𝑝𝑎𝑐𝑡 = 0.04 𝑐𝑚/𝑠 with the
Impactor mass of 1242 kg (see section 2.1), the NEO mass of 3.06e10 kg (see [RD5]) and a
relative impact velocity of 9.6 km/s (see section 2.1).
The value of at least 0.04 cm/s is larger than the measurement uncertainty of the Radio Science
Experiment (RSE) which is 0.01 cm/s (1 sigma). This describes the measurement between Earth
and S/C and describes the state of the art RSE measurement capabilities at S/C (see for example
the Don Quijote study [RD16]). Several weeks of measurement are required.
For ground-based validation measurements a tangential Δv change of at least 0.05 cm/s is required
(refer to [RD8], section 2.2). Several years of measurement are required.
3.1.4 Accuracy requirements
NS2-SYS-290// : Impact accuracy
The Impactor shall hit the target point on the NEO with an uncertainty of 50 m miss distance to a
99 % probability (to a verification confidence level of 95%) with a goal of 25m.
Rationale:
This is necessary to ensure the applicability of this requirement for the Two S/C KI Demo Mission
and for the NEOTωIST Mission. The specified miss distance accuracy is finally justified by the
Itokawa (NEOTωIST) geometry where a minimum lever arm must be maintained while ensuring
the impact.
Note 1:
This purely refers to the impactor GNC performance and does not consider COG determination
uncertainty to achieve the overall targeting needs also for smaller NEO.
Note 2:
A single requirement value is maintained for both missions, due to the fact that the figures
required for both missions are of similar magnitude and the delta-analysis for slightly different
values does not appear to be efficient or necessary at this stage. Should the requirement be
extremely challenging to meet for the Two S/C mission, a slight relaxation may be revisited in the
future.
3.1.5 Launch requirements
NS2-SYS-300// : Launcher
The S/C participating in the KI demonstration mission shall be compatible with a launch on
Soyuz-Fregat from Kourou.
Rationale:
Driven by the intended shared launch scenario (refer to NS2-SYS-080) and a given precedence for
European launchers. Furthermore a launch with Soyuz-Fregat increases the mass of the Impactor
and thus the deflection effect because the upper stage (Fregat) stays attached to the Impactor.
NS2-SYS-310// : Launch epoch
The mission shall be compatible with a launch date between 2020 and 2035.
Rationale:
A launch window 15 years after the finalisation of the current project phase has been chosen to
give a realistic timeframe for political and programmatic discussions and a detailed development
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 21/63
phase.
NS2-SYS-320// : Shared launch scenario
In case of the Two-S/C KI Demo Mission for both participating spacecraft a shared launch
scenario shall be implemented, meaning, that both spacecraft are launched at the same time on the
same launcher.
Rationale:
The shared launch scenario provides a cost-efficient approach. Furthermore a launch with Soyuz-
Fregat increases the mass of the Impactor and thus the deflection effect because the upper stage
(Fregat) stays attached to the Impactor.
3.1.6 Mission phases
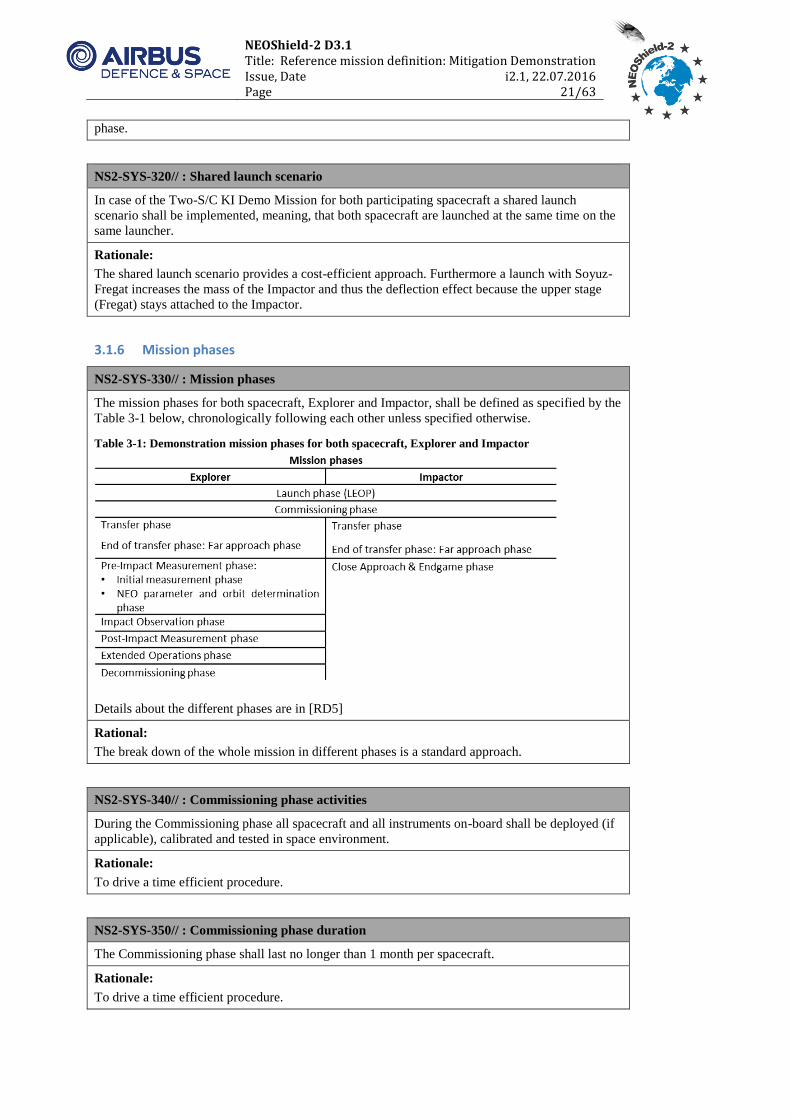
NS2-SYS-330// : Mission phases
The mission phases for both spacecraft, Explorer and Impactor, shall be defined as specified by the
Table 3-1 below, chronologically following each other unless specified otherwise.
Table 3-1: Demonstration mission phases for both spacecraft, Explorer and Impactor
Details about the different phases are in [RD5]
Rational:
The break down of the whole mission in different phases is a standard approach.
NS2-SYS-340// : Commissioning phase activities
During the Commissioning phase all spacecraft and all instruments on-board shall be deployed (if
applicable), calibrated and tested in space environment.
Rationale:
To drive a time efficient procedure.
NS2-SYS-350// : Commissioning phase duration
The Commissioning phase shall last no longer than 1 month per spacecraft.
Rationale:
To drive a time efficient procedure.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 22/63
3.2 Mission requirements – NEOTωIST/Itokawa Mission
The requirements in this chapter are only applicable to the NEOTωIST Mission, despite the fact that identical requirements may be listed in the Mission requirements section of the Two-S/C mission. Possible duplications are meant to enable separate evolution and later separation.
3.2.1 Primary objectives
The NEOShield-2 demonstration mission is characterized by the following primary objectives:
NS2-MRD-010//: Technology demonstration impactor
The mission shall identify uncertainties in the implementation of the Kinetic Impactor principle in
order to eliminate (reduce) them for a real mitigation mission, promote the required technology
and demonstrate the overall technical feasibility.
Rationale:
The accomplished NASA Deep Impact mission shows characteristic parallels to a Kinetic
Impactor mitigation mission. Their demonstrated results concerning the KI principle are in-line
with the state-of-the-art kinetic impact principle theories, related empirical tests and impact
modelling simulations performed on ground, however the target comet had a mass too large for
any linear momentum change from the impact to be measureable.
A complete demonstration of a KI mission under representative conditions has never been
accomplished, although some technological building blocks required to implement a KI mission
are already available and well maturated through the different commercial and institutional
satellite development projects of the last decades.
However, there are still some technological uncertainties, which need to be eliminated before the
need of a real NEO mitigation mission becomes threatening. Further technology development is
necessary, particularly in the field of the Impactor GNC and the Explorer reconnaissance
capabilities (e.g. 3D reconstruction) as well as the high level of autonomy of both spacecraft.
Most of these aspects will only be investigated and developed to a proven design through the
implementation of a demonstration mission. Ground based analogies cannot provide the
confidence and progress needed to carry out a real life mitigation mission.
NS2-MRD-020//: Technology demonstration observer
The mission shall mature the capability to observe the impact of the Kinetic Impactor (KI)
spacecraft, with sufficient quality to verify effectiveness of the impact, from a vehicle separated
from the KI prior to impact.
Rationale:
The ability to observe the impact from a deployed fly-by vehicle is valuable for the objectives of
the NEOTωIST (NT) mission as well as for an operational deflection mission. For NT the
capability supports the achievement of NS2-MRD-050. For an operational deflection mission that
is forced to work without an explorer spacecraft, the observer technology provides a quick initial
verification of an effective impact, which constitutes valuable information.
Note:
“Verification of effectiveness” here means verification that impact conditions were roughly as
planned, for instance, approximately 0° incident angle, main ejecta direction approx. in anti-impact
velocity direction. Precise quanification of ejecta momentum is not required for doing this.
Approx. direction of average ejecta direction is more important.
NS2-MRD-030// : Deflection validation
The demonstration mission shall measure and validate the momentum transfer achieved by the
impact.
Rationale:
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 23/63
Although the physical principles of deflection through a KI are not in doubt it has never been
demonstrated by means of measuring achieved deflection. Since the mission is also meant to build
confidence in the KI method there is value in showing by measurement that a state change of the
target object has been achieved.
Note:
The intended means of measuring and validating the achieved momentum transfer is through
ground-based observations.
NS2-MRD-040// : β determination
The NEOTωIST demonstration mission shall quantify the momentum transfer multiplication
factor β to a measurement uncertainty of ±0.1 (TBC).
Rationale:
The magnitude of β is expected to be in the range between 1 and 5. A minimal measurement
precision of 0.1 is therefore judged adequate and was already baseline in NEOShield (see [RD5]).
One important aspect often misunderstood is reminded hereafter. For a cost effective demo
mission the overall deflection will be small due to the mass ratios between the spacecraft and the
NEO:
A real-life mitigation mission realizes the goal to deflect the NEO sufficiently to make sure it
misses the Earth (and to avoid any later keyhole issues).
A demonstration mission implements the objective to deflect the target NEO sufficiently to be able
to characterise the process and to measure the effectively achieved deflection (to quantify the
effective momentum transfer).
A large (and expensive) deflection is thus not inherently necessary for a demonstration mission
providing that the impact effects are measurable.
Note 1:
The definition of momentum transfer multiplication factor β is provided in WP8 Deliverable
Technical Note: β – factor definition in NEOShield-2.
Note 2:
The question whether the 0.1 accuracy requirement can be met under the NEOTωIST scenario is
part of the ongoing work regarding this scenario. Even relaxed values would be valuable because
significantly better than the current state of prediction uncertainty (=> 2).
NS2-MRD-050// : Observation for improvement of impact models
The impact event and outcome shall be characterised such that impact effect predictions and
models can be tested against observed effects, for the purpose of verification and improvement.
Rationale:
Prediction of the effectiveness of a KI impact is essential to the execution of an operation
deflection mission. However, no experimental data for impacts a representative scale exists.
Therefore, current predictions of KI effectiveness are likely inaccurate. Any impact event
observations that can verify or constrain modelling assumptions are beyond the current state of the
knowledge are therefore valuable in preparation of a deflection mission.
Note:
Observables and accuracy is subject to selection based on utility/cost assessment
3.2.2 Earth safety & target NEO
Earth safety means that a deflection demonstration mission must not increase the risk of a future Earth impact in any meaningful way, an obvious condition for any such mission. This has been/will be demonstrated by analysis taking into account all uncertainty factors of the mission. The analysis for the NEOTωIST reference mission can be found in [RD18].
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 24/63
The NEOTωIST concept relies on an object whose spin state is readily observable from Earth and whose geometry and mass properties are sufficiently well known to calculate β from the observed spin state change. Further, the requirement of detailed a-priory target geometry information implies an object that has previously been visited. Itokawa fits all the requirements and thus is specified as the reference target object.
NS2-MRD-060// : Ensure Earth safety
The selection of the NEO target and the associated mission design shall ensure that the NEO
minimum encounter distance to Earth, resulting from an impact deflection, is greater than 10 mean
lunar distances (10 x 384,400 km) until the year 2125 even in the worst case, on the basis of
available knowledge of mission parameters.
Rationale:
The stated minimum encounter distance of 10 mean lunar distances ensures that even in the worst
case the target NEO will not become a hazard to the Earth for many generations to come. Once the
mission design has become better defined, detailed analysis of the possible post-deflection-attempt
evolution of the orbit shall be conducted for at least 100 years into the future to confirm that the
worst-case impact probability is well below the background impact hazard, as defined on the
Palermo scale.
NS2-MRD-070// : Target NEO
The NEOTωIST Mission shall target the NEO (25143) Itokawa (1998 SF36).
Rationale:
Itokawa is one of the best known NEO due to the Hayabusa mission. Thus good models w.r.t.
mass, shape and attitude motion from Itokawa are available. Based on these models changes of the
motion due to an impact can be predicted and compared with the measurements with higher
reliability than for other objects. Further the precise knowledge of the geometry can be taken into
account for the impactor GNC design, which would otherwise only be possible by adding an
Explorer spacecraft to the mission.
Thus Itokawa is finally selected as target NEO for the NEOTωIST Mission.
NS2-MRD-080// : Mission opportunities
The target NEO shall allow for at least two launch opportunities within a 10 year period, that are
separated by at least 2 years.
Rationale:
Schedule flexibility significantly increases the attractiveness of the mission concept as provides
more flexibility with regard to funding and political constraints, and reduces risk.
Note:
Numbers may be modified in the future
3.2.3 Mission architecture
NS2-MRD-090// : Impactor
The NEOTωIST Impactor Demo Mission shall consist of at least one spacecraft, a kinetic
impacting spacecraft, called Impactor.
Rationale:
For the NEOTωIST Mission the measurements of the NEO relevant state change will be measured
from ground.
Note:
The Impactor spacecraft is the vehicle that after an interplanetary cruise with minimum ground
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 25/63
support performs autonomous terminal guidance and navigation manoeuvres towards the target
NEO, relaying engineering GNC data and images of the target to the ground station and/or the
Explorer spacecraft for relaying purposes and impacting at very high relative speed (in the order of
10 km/s) against the NEOs surface. The Impactor spacecraft will demonstrate the autonomous
GNC capability based on visual navigation and provide the deflection impulse to the NEO which
will be measured and characterised by the Explorer and/or the ground station afterwards.
NS2-MRD-100// : Interplanetary cruise stack
The NEOTωIST Impactor Demo Mission shall consist only one spacecraft stack performing the
interplanetary cruise.
Rationale:
The baseline NEOTωIST scenario assumes multiple sub-S/C during the target encounter. Different
allocations of functionality among them are possible for the mission designer. However, an
important feature of the concept is that only a single vehicle stack makes the interplanetary
transfer, thus reducing mission cost.
NS2-MRD-110 // GOAL: Observers
The NEOTωIST Impactor Demo Mission shall feature at least one spacecraft which observers the
target impact at close* range, called Observer.
Rationale:
In the most basic version the NEOTωIST concept may be implemented with only an impactor spacecraft. However, the value can be significantly enhanced by in-situ observation of the impact event. Therefore, the existence of an Observer is a strongly suggested goal requirement.
Note:
* “Close” means a range of kilometres to thousands of kilometres. The precise observation
distance profile will be a result of mission design optimisation.
3.2.4 Post-impact measurements
NS2-MRD-0120// : Determine NEO rotational state after impact
A determination of the NEO rotational state (axis, direction and period) after the impact shall be
done.
Rationale:
Required to determine the effectively achieved deflection capability in the NEOTωIST scenario.
Note:
In the case of NEOTωIST the spin state determination is performed from Earth.
The measurement accuracy of the spin state measurement is determined with the β accuracy
requirement (NS2-MRD-040) and other uncertainty contributors to β reconstruction.
NS2-MRD-0125// : Measurement accuracy rotational state change
The spin period change of the NEO caused by the Impactor shall be measured with an accuracy of
better than 0.4 minutes (3 σ) (TBC).
Rationale:
[RD19] shows that an accuracy of 0.4 minutes is sufficient in order to reconstruct β with good
accuracy (β accuracy 0.1 value still TBC) while considering other relevant uncertainty factors.
3.2.5 Impact event observations
NS2-MRD-130// : Impact site localisation - Impactor
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 26/63
The Impactor shall provide information on the actual location of impact.
Rationale:
Posteriori knowledge is an important input to β determination. For the impactor-only mission
scenario it is crucial that the Impactor provide good knowledge on this, e.g. to be reconstructed
from last image of navigation camera. For mission scenarios that include an Observer(s), this
capability is still deemed important because it provides robustness to the mission and potentially
relaxes the requirements on the Observer(s).
NS2-MRD-140 - GOAL// : Ejecta observation
An Observer shall observe the impact and the resulting ejecta and provide the observation data to
ground.
Rationale:
This observation is needed to support achievement of NS2-MRD-050. The specification as a goal
requirement takes into account that an Impactor-only mission scenario is also a possibility, in
which case this observation is not foreseen. In case an Observer is part of the mission this
requirement becomes mandatory.
Note 1:
The performance details of observation must be further specified at a later stage.
NS2-MRD-150 - GOAL// : Crater observation
An Observer shall observe the crater resulting from the KI impact and provide the observation data
to ground.
Rationale:
This observation is needed to support achievement of NS2-MRD-050, and will help verify crater
formation modelling. It may also help reduce uncertainties in β modelling.
Note 1:
The specification as a goal requirement takes into account that an Impactor-only mission scenario
is also a possibility. Further, it recognizes that crater observation is potentially in conflict with
ejecta observation (NS-MRD-140), such that it may be necessary to chose one or the other, or
include 2 Observer vehicles in the mission (which is the baseline assumption). Finally, the
specification of GOAL is due to the fact that the feasibility of crater observation of the given
mission concept is not yet conclusively proven.
Once crater observation is proven feasible and if multiple Observers become the mission baseline,
this requirement can become mandatory.
Note 2:
The performance details of observation must be further specified at a later stage.
3.2.6 Transfer and encounter trajectory requirements
NS2-MRD-160// : Maximum Swing By
The number of swing-by manoeuvers during the interplanetary cruise shall be constrained to a
maximum of 3 swing-by manoeuvers per spacecraft.
Rationale:
Limits the mission analysis solution space & operational complexity.
NS2-MRD-170// : Swing By Bodies
Swing-by manoeuvers during the interplanetary cruise shall be restricted to Earth, Mars & Moon.
Rationale:
Limits the mission analysis solution space & spacecraft complexity by reducing the scope of the
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 27/63
power and thermal environment that must be designed for.
NS2-MRD-180// : Interplanetary cruise duration
The interplanetary cruise duration from Earth to the target NEO shall be constrained to a
maximum of 3 years.
Rationale:
To constrain limit the overall mission duration, which reduces mission operations cost and allows
for less demanding spacecraft design.
Note:
Preliminary analysis shows that good solutions exist for this duration constraint.
NS2- MRD-190// : Impact velocity range
The relative velocity between the Impactor and the target NEO at impact shall be between 5 km/s
and 10 km/s.
Rationale:
A minimum velocity is imposed to remain representative with high velocity impact physics; the
upper value is a technical constraint imposed due to the challenges associated with observing the
impact event in a fly-by configuration at high speeds.
Note:
The Two-S/C mission scenario does not need to perform observation in fly-by mode. Thus a
higher upper limit of 15 km/s is assumed here, which is imposed by the Impactor GNC
technology.
NS2- MRD-200// : Spin period change
The change in spin period of the target NEO caused by the Impactor shall be at least 3 minutes
(TBC).
Rationale:
Analysis of the precision with which spin rate changes can be measured from Earth shows that a
spin rate change of 3 minutes or larger would allow determination of spin rate change with an
accuracy of 15 % (0,4 minutes) within a year of the impact in the worse case scenario, within 3
years the uncertainty in the period will be reduced to seconds. [RD20][RD18] proposes this value
as a requirement.
[RD19] shows by preliminary analysis that desired β-accuracy (accuracy value of ±0.1 still TBC)
can be achieved with a measurement accuracy of 0.4 minutes.
Note:
With the baseline assumption about impact geometry, as per [RD18], the required spin period
change can be translated into a minimum impact impulse of 3100 kNs.
NS2- MRD-210// : Observer Safe Geometry
If one or more Observer spacecraft are employed, the encounter trajectory of least one Observer
shall be chosen such that it ensures safety of this Observer from collision with impact ejecta.
Rationale:
The baseline NEOTωIST scenario assumes that at least one Observer survives the impact event on
a safe fly-by trajectory, thus enabling it to also function as a data relay node for other vehicles and
removing the requirement for real-time transmission to Earth of its own observation data.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 28/63
3.2.7 Accuracy requirements
NS2-MRD-220// : Impact accuracy
The Impactor shall hit the target point on the NEO with an uncertainty of 50 m miss distance to a
99 % probability (to a verification confidence level of 95%) with a goal of 25m.
Rationale:
This is necessary to ensure the applicability of this requirement for the Two S/C KI Demo Mission
and for the NEOTωIST Mission. The specified miss distance accuracy is finally justified by the
Itokawa geometry where a minimum lever arm must be maintained while ensuring the impact.
Note 1:
This purely refers to the impactor GNC performance and does not consider COG determination
uncertainty to achieve the overall targeting needs also for smaller NEO.
Note 2:
A single requirement value is maintained for both missions, due to the fact that the figures
required for both missions are of similar magnitude and the delta-analysis for slightly different
values does not appear to be efficient or necessary at this stage. Should the requirement be
extremely challenging to meet for the Two S/C mission, a slight relaxation may be revisited in the
future.
3.2.8 Launch requirements
NS2-MRD-230// : Launcher
The baseline launcher for the NEOTωIST demonstration mission shall be Vega with the addition
of a Lisa Pathfinder Propulsion Module.
Rationale:
The NEOTωIST mission scenario is currently intended as a low-cost European impactor
demonstration mission. Thus the starting assumption is a low-cost European launcher. Next to the
necessity for transfer, the use of a transfer stage (as opposed to direct injection by a larger
launcher), also offers the advantage of providing extra Impactor mass, if it remains attached to the
Impactor.
Note:
If Vega ends up being too highly constrained for mission feasibility, alternatives such as Falocn 9
and Fregat/ Soyuz should be considered in the future.
NS2-MRD-240// : Launch epoch
The mission shall be compatible with a launch date between 2022 and 2035.
Rationale:
A launch window starting 5 years after the finalisation of the current project phase has been
chosen to give a realistic timeframe for political and programmatic discussions and a detailed
development phase.
Note:
The mission geometry as examined by [RD18] allows for approximately 3 mission opportunities
per decade, with somewhat varying flight times.
3.2.9 Mission phases
NS2- MRD-240// : Mission phases
The mission phases of the Impactor, shall be defined as specified by the Table 3-1 below,
chronologically following each other unless specified otherwise.
Table 3-2: Demonstration mission phases for both spacecraft, Explorer and Impactor
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 29/63
Impactor Mission Phases
Launch Phase (LEOP)
Commissioning Phase
Transfer Phase
Far approach phase
Close approach & Endgame phase
Details about the different phases are in [RD5]
Rational:
The break down of the whole mission in different phases is a standard approach.
NS2- MRD-250// : Commissioning phase activities
During the Commissioning phase all spacecraft and all instruments on-board shall be deployed (if
applicable), calibrated and tested in space environment.
Rationale:
To drive a time efficient procedure.
NS2- MRD-260// : Commissioning phase duration
The Commissioning phase shall last no longer than 1 month.
Rationale:
To drive a time efficient procedure.
Note:
Precise duration is negotiable.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 30/63
4 General Spacecraft Requirements
The requirements in this section are applicable for the Two-S/C KI Demo Mission (Explorer and Impactor) and the NEOTωIST Mission (Impactor).
4.1 Design requirements
NS2-GEN-010// : General subsystem requirement
The spacecraft shall be designed and dimensioned such that each subsystem provides its required
nominal performance without interfering the fulfilment of nominal performance of any other
spacecraft subsystem for the full operational lifetime under all nominal operational conditions.
Rationale:
This is necessary to fulfil the mission.
NS2-GEN-030// : Launch mass to meet launcher performance
The spacecraft wet total mass including all applicable margins and launch adapters shall not
exceed the launcher performance of the launchers specified in NS2-SYS-300 and NS2-MRD-230.
Rationale:
The launcher selection is derived for the interplanetary transfer injection from [AD2] for Two S/C
KI Mission and [AD2] or [AD3] or [AD4] for NEOTωIST Mission.
NS2-GEN-040// : Spacecraft reliability
The overall reliability of each spacecraft (incl. payload) shall be ≥ 84% from launcher injection to
the interplanetary cruise to the end of the primary operations phase (about 7 years in total/ 3 years
for NEOTωIST).
Rationale:
This reliability was assessed based on experiences with Rosetta and BepiColombo.
Note:
For the purposes of this calculation, the assumed reliability of the payload until the end of the
primary operations phase shall be expressed as a single factor of 0.96 assuming 20% duty Cycle
(Payloads will be ON the last year of the mission only).
NS2-GEN-050// : Communication Reliability
The S/C shall be designed with the capability to operate all primary and redundant subsystems,
equipment and items, minimizing interruption and/or degradation of communications.
Rationale:
This is a general reliability requirement.
NS2-GEN-060// : Communication Single Point Failures
Single point failures, defined as single part or unit failures which could cause permanent loss of
one or more communication channels, shall be minimized and shall be assessed by means of
FMECA to the appropriate level. Level of minimisation shall be defined in following projects.
Rationale:
This is a general reliability requirement.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 31/63
NS2-GEN-070// : Contamination
The S/C shall be designed and manufactured to minimise the degradation effects of contamination
stemming from the actual environment or self-generated contamination throughout the whole
lifecycle.
Rationale:
This is a general design requirement.
4.2 AOCS/GNC requirements
NS2-GEN-120// : Accuracy of solar array pointing
During all phases, the AOCS shall (command and) point the solar arrays with accuracy better than
10 deg (3σ).
Rationale:
The solar arrays are rotatable with one degree of freedom with resolution better than 1 deg (design
baseline in NEOShield, see [RD5], Table 6.3). Assuming a pointing accuracy with the AOCS 10
times larger than the resolution the cosine losses for 10 deg corresponds to 1.5% power loss which
is negligible and thus a good starting value for the solar array pointing.
NS2-GEN-130// : Accuracy of antenna pointing
When Earth communication is intended, during all phases, the AOCS shall (command and) point
the antenna(s) with an absolute pointing error better than 500 arcsec (95% confidence level).
Rationale:
The antenna(s) is (are) rotatable with two degrees of freedom with resolution better than 0.01 deg
(design baseline, see [RD5], Table 6.3). Two degrees of freedom are sufficient to avoid losing the
NEO in the FOV and to ensure communications with Earth at all times. Ten times lower than the
required pointing accuracy imposed on AOCS the value of 500 arcsec (=0.139 deg) from
BepiColombo (see [RD17]) is considered typical for half power bandwidth of the radiation pattern.
NS2-GEN-150// : Sun acquisition after the launcher separation, or in case of safe mode entry
The AOCS shall be able to perform sun acquisition after the launcher separation, or in case of safe
mode entry, with a duration compatible with the electrical power subsystem sizing.
Rationale:
The alignment of the solar arrays towards the Sun shall ensure the power supply of the satellite.
Note:
In a safe mode it must be assumed that solar arrays cannot be deployed and/or are damaged.
NS2-GEN-160// : Control DoF
The S/C shall have independent pure force and pure torque actuation capability.
Rationale:
This is needed in order to carry out correction manoeuvres while keeping the target in the main
relative navigation sensor FoV, decouple attitude guidance from position guidance, and ease both.
NS2-GEN-170// : Perturbations
Attitude control shall be robust against parasitic torques due to sloshing and solar array flexible
modes without instability during the whole operational lifetime.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 32/63
Rationale:
Performance requirement shall be reached and mission ensured despite perturbations.
4.3 Thermal control and structure requirements
NS2-GEN-180// : General Thermal Design
The thermal design of the S/C shall allow all subsystems and equipment to work within their
specified temperature ranges in all modes throughout the satellite’s lifetime.
Rationale:
This is a general thermal control requirement.
NS2-GEN-190// : General Structural Design
The structure of the S/C shall enable the accommodation of all subsystems and equipment and it
shall resist all predictable stresses to protect all subsystems and equipment from launch throughout
the satellite’s lifetime.
Rationale:
This is a general structural requirement.
4.4 Communication subsystem requirements
NS2-GEN-200// : Telemetry, Tracking & Command Function
The S/C shall provide telemetry, tracking and command functions during all mission phases
including emergency cases.
Rationale:
This is a general Telemetry, Tracking & Command Function requirement.
4.5 Power subsystem requirements
NS2-GEN-210// : General power performance
The S/C shall provide the power as required by the subsystems and equipment while meeting the
power margin requirements as per ECSS.
Rationale:
This is a general power requirement.
4.6 Command and data handling subsystem requirements
NS2-GEN-220// : On-Board Data Handling and Command Function
The On-Board Data Handling and Command function shall provide all the necessary data
processing and computing services and resources for the fulfilment of the system requirements and
mission objectives.
Rationale:
This is a general On-Board Data Handling and Command requirement.
4.7 Environment requirements
NS2-GEN-230// : Space environment
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 33/63
The S/C shall be compatible with the space environment throughout the whole lifecycle from
launch up to the operation in close vicinity of the NEO.
Rationale:
This is a general design requirement.
NS2-GEN-240// : General launch environment
The S/C shall be able to withstand the launch environment of the candidate launch vehicles.
Rationale:
This is a general design requirement.
NS2-GEN-250// : Electromagnetic launch environment
The S/C shall be designed for electromagnetic auto-compatibility and compatibility with the
launch vehicle.
Rationale:
This is a general design requirement.
NS2-GEN-260// : Internal electromagnetic environment
The system, subsystem and unit design and the corresponding test programme shall be adequate to
ensure that the combined conducted and radiated emissions from all sources shall not adversely
affect the correct operation of the payload or degrade the performance of elements of the platform
subsystems.
Rationale:
This is a general design requirement.
NS2-GEN-270// : ESD Protection
The S/C shall be designed to include internal and external ESD protection to eliminate discharge
threat.
Rationale:
This is a general design requirement.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 34/63
5 Impactor Spacecraft Requirements
The requirements in this section are applicable for the impactor of the Two-S/C KI Demo Mission and the NEOTωIST Mission if not stated otherwise.
5.1 GNC/AOCS subsystem requirements
NS2-IMP-010// : Performance requirement
The Impactor shall feature a GNC/AOCS system for both transfer to the NEO and the impact on
the NEO with an accuracy as required in NS2-SYS-290.
Rationale:
This is necessary to ensure that the GNC/AOCS performance corresponds to NS2-SYS-290.
Note:
As a goal the impact accuracy with respect to the point defined in NS2-SYS-290 should be
significantly better than the required performance.
NS2-IMP-020// : GNC Autonomy level
The Impactor shall implement a fully autonomous navigation, guidance and control function for
the last 24 hours of its life.
Rationale:
On the JUICE mission, 72 hours delay cut off before a fly-by (similar to an impact but with a
voluntarily increased miss-range) are considered for an update of the navigation state by ground
available at closest-apporach-24h (48h processing). This is conservative considering ESOC
operational margins, thus the same value is chosen here. Note that the same is observed on Mars
re-entry scenario with typically a last correction manoeuvre at EIP-24h. This value seems therefore
relevant as basic assumption for NEOShield-2. Without margin, ESOC can also complete a
navigation analysis in 8 hours according to work performed for instance for Footprint-QSO or
Rosetta. For Mars re-entry an update of parameters can be performed a few hours before EIP so
there are possibilities to relax this requirement. Thus the 24h assumption is rather conservative as
emergency or contingency ground intervention would be possible up to 6-8 hours before impact, in
which case the autonomous behaviour can be monitored during the first half or more of the
endgame to ensure proper behaviour.
NS2-IMP-030// : Propellant requirement
The Impactor shall accommodate sufficient propellant mass to guarantee autonomous terminal
guidance and control in the last 24 hours.
Rationale:
Less than 15 m/s ΔV is required for terminal guidance in the impact scenario for the demo mission
target (2001 QC34), according to simulations carried out for this case. This is however dependent
on the mission scenario and is just a baseline. In order to convert this ΔV into propellant mass, the
efficiency of the thruster configuration must be considered in the rocket equation. The value in
terms of mass is therefore not provided as it would impose constraints both on the thruster
configuration and the propellant system, which is not the purpose of a specification at this level.
Note:
The terminal phase or endgame phase of the impactor spacecraft is the time just before the impact,
where crucial corrections to ensure a proper impact are autonomously performed
NS2-IMP-040// : Last manoeuvre and control authority
The Impactor control system shall have sufficient control authority to be able to deliver a last
correction manoeuvre in the 50 s (TBC) before impact with 25 s (TBC) as goal.
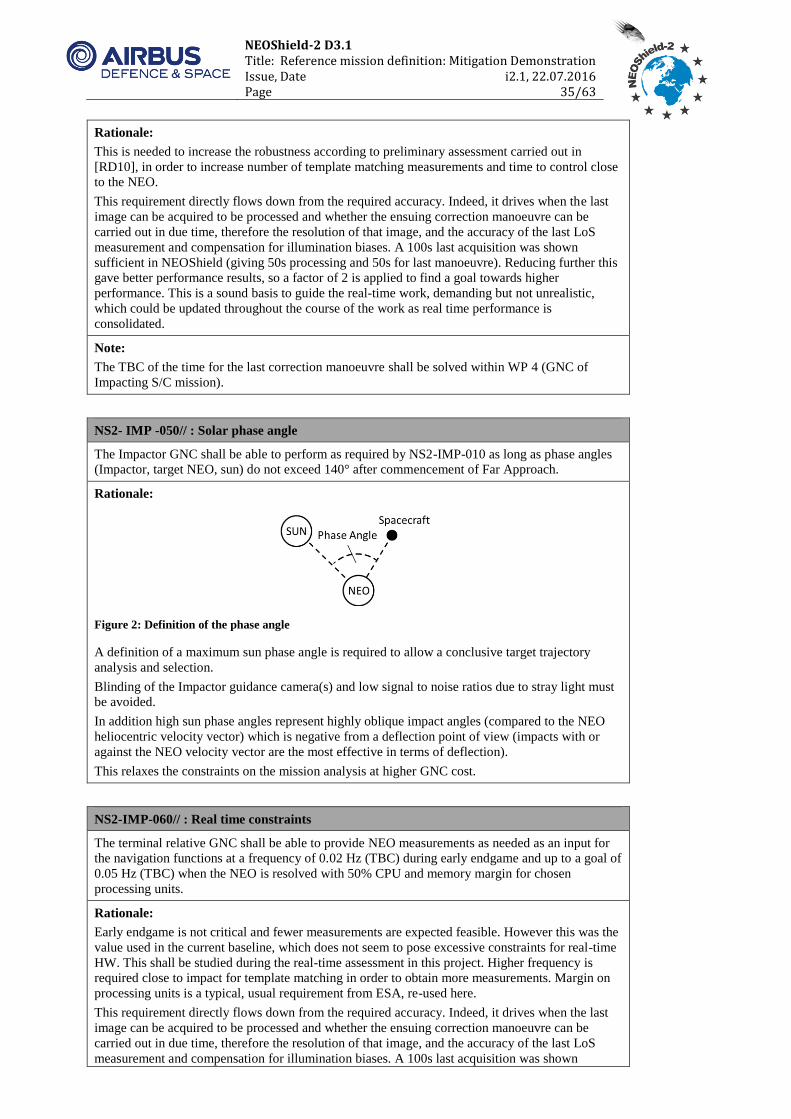
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 35/63
Rationale:
This is needed to increase the robustness according to preliminary assessment carried out in
[RD10], in order to increase number of template matching measurements and time to control close
to the NEO.
This requirement directly flows down from the required accuracy. Indeed, it drives when the last
image can be acquired to be processed and whether the ensuing correction manoeuvre can be
carried out in due time, therefore the resolution of that image, and the accuracy of the last LoS
measurement and compensation for illumination biases. A 100s last acquisition was shown
sufficient in NEOShield (giving 50s processing and 50s for last manoeuvre). Reducing further this
gave better performance results, so a factor of 2 is applied to find a goal towards higher
performance. This is a sound basis to guide the real-time work, demanding but not unrealistic,
which could be updated throughout the course of the work as real time performance is
consolidated.
Note:
The TBC of the time for the last correction manoeuvre shall be solved within WP 4 (GNC of
Impacting S/C mission).
NS2- IMP -050// : Solar phase angle
The Impactor GNC shall be able to perform as required by NS2-IMP-010 as long as phase angles
(Impactor, target NEO, sun) do not exceed 140° after commencement of Far Approach.
Rationale:
Figure 2: Definition of the phase angle
A definition of a maximum sun phase angle is required to allow a conclusive target trajectory
analysis and selection.
Blinding of the Impactor guidance camera(s) and low signal to noise ratios due to stray light must
be avoided.
In addition high sun phase angles represent highly oblique impact angles (compared to the NEO
heliocentric velocity vector) which is negative from a deflection point of view (impacts with or
against the NEO velocity vector are the most effective in terms of deflection).
This relaxes the constraints on the mission analysis at higher GNC cost.
NS2-IMP-060// : Real time constraints
The terminal relative GNC shall be able to provide NEO measurements as needed as an input for
the navigation functions at a frequency of 0.02 Hz (TBC) during early endgame and up to a goal of
0.05 Hz (TBC) when the NEO is resolved with 50% CPU and memory margin for chosen
processing units.
Rationale:
Early endgame is not critical and fewer measurements are expected feasible. However this was the
value used in the current baseline, which does not seem to pose excessive constraints for real-time
HW. This shall be studied during the real-time assessment in this project. Higher frequency is
required close to impact for template matching in order to obtain more measurements. Margin on
processing units is a typical, usual requirement from ESA, re-used here.
This requirement directly flows down from the required accuracy. Indeed, it drives when the last
image can be acquired to be processed and whether the ensuing correction manoeuvre can be
carried out in due time, therefore the resolution of that image, and the accuracy of the last LoS
measurement and compensation for illumination biases. A 100s last acquisition was shown
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 36/63
sufficient in NEOShield (giving 50s processing and 50s for last manoeuvre). Reducing further this
gave better performance results, so a factor of 2 is applied to find a goal towards higher
performance. This is a sound basis to guide the real-time work, demanding but not unrealistic,
which could be updated throughout the course of the work as real time performance is
consolidated.
Note:
The minimum frequency numbers must allow proper targeting functionality and shall be inserted
to the requirement above.
The TBC of the frequencies shall be solved within WP 4 (GNC of Impacting S/C mission).
NS2-IMP-070// : Impactor CoG knowledge
The terminal GNC shall maintain required performance even with 5 cm maximum Impactor CoG
knowledge uncertainty.
Rationale:
This is the assessed Impactor CoG knowledge uncertainty due to current design with attached
Soyuz stage. This is sufficient according to [RD10] analysis with a margin of factor 2.
NS2-IMP-080// : Provide targeting data to Impactor
The data required by the Impactor GNC (NEO size, three dimensional geometry and rotational
state) shall be provided in required format prior to the Close Approach & Endgame phase.
Rationale:
The Impactor GNC depends on the detailed reconnaissance data gathered by ground station or an
accompanying S/C (e.g. the Explorer) to reach required high accuracy targeting performance.
Note:
This data can either be directly sent from the ground station or an accompanying S/C (e.g. the
Explorer).
The current requirement shall make sure that the provision of targeting data is requested on a high
level. An analysis in WP 4 shall enable a break down of more detailed requirements with specific
values on lower level.
NS2-IMP-090 // : Endgame imaging
During the Close Approach & Endgame phase the Impactor shall transmit regular (interval is
TBD) images with increasing rate of the impact location to the ground station or an accompanying
S/C (e.g. the Explorer) in order to support posteriori determination and verification of the impact
point.
Rationale:
An image sequence of the last moments before impact from the Impactor perspective is important
to evaluate the impact effects posteriori and is a valuable information in case of failure or
unexpected behaviour. The impact location itself can also be detected retrospectively via the
Explorer.
NS2-IMP-100 // : Endgame GNC engineering data
During the Close Approach & Endgame phase the Impactor shall provide GNC engineering data
(e.g. attitude, attitude change rate) to the ground station or an accompanying S/C (e.g. the
Explorer)
Rationale:
Transmission of GNC engineering data is very valuable for GNC performance assessment and
lessons learned.
Note:
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 37/63
This will be limited by the short time-span of the final actions.
Low volume data:
Intermediate results of image processing function (reduced log file)
Measured target LoS in camera frame
Measured target LoS in inertial frame
Estimated navigation state
Navigation state error covariance
Sensor health status
Commanded manoeuvres amplitude and direction
Actuator health status
High volume data (require high capability link, for instance with orbiter):
Full images if possible or asteroid search windows to limit data amount
NS2-IMP-110// : AOCS autonomy level
The Impactor shall implement a fully autonomous AOCS function for the last 24 hours of its life.
Rationale:
Classical ground operations delays indicate that on a day before impact (or more) ground
intervention is not possible and autonomous AOCS is required beyond this date (stopping
operations one day before impact would never guarantee sufficient impact accuracy).
On the JUICE mission, 72 hours delay cut off before a fly-by (similar to an impact but with a
voluntarily increased miss-range) are considered for an update of the navigation state by ground
available at closest-apporach-24h (48h processing). This is conservative considering ESOC
operational margins, thus the same value is chosen here. Note that the same is observed on Mars
re-entry scenario with typically a last correction manoeuvre at EIP-24h. This value seems therefore
relevant as basic assumption for NEOShield-2. Without margin, ESOC can also complete a
navigation analysis in 8 hours according to work performed for instance for Footprint QSO or
Rosetta. For Mars re-entry an update of parameters can be performed a few hours before EIP so
there are possibilities to relax this requirement. Thus the 24h assumption is rather conservative as
emergency or contingency ground intervention would be possible up to 6-8 hours before impact, in
which case the autonomous behaviour can be monitored during the first half or more of the
endgame to ensure proper behaviour.
NS2-IMP-120// : Stabilization
The Impactor shall be three-axis stabilized during endgame phase.
Rationale:
In order to ensure corrections in the right direction during endgame, three-axis stabilization is
needed and spin stabilization is unrealistic. This is a requirement for endgame. For cruise this is
also required but it is more a design choice for proper orientation of non-steerable solar array and
antennas and this type of requirement is therefore not desirable at this level.
NS2-IMP-130// : Mean pointing error
The Impactor attitude determination and control system should be able to maintain its attitude
w.r.t. the target NEO on all three axes with a Mean Pointing Error of less than 0.1 deg (3 sigma).
Rationale:
This is needed on relative navigation sensor cross-axis to maintain the target in a confined region
of sensor FoV. This is to be confirmed depending on the selected FoV, which is a design choice,
and the proposed value is consistent with the current proposed demo mission design. Around
sensor boresight axis, the specification could be relaxed for imaging but needs to be close to the
indicated value to avoid excessive control errors.
Note:
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 38/63
This is according to the ECSS standard [RD15]
NS2-IMP-140// : Relative pointing error
The Impactor attitude determination and control system shall be able to maintain its attitude w.r.t.
the target NEO on all three axes with a Relative Pointing Error (RPE) of less than 30 µrad (3
sigma) over an integration time of 0.2s. As a goal, the RPE should be less than 0.5 µrad (3sigma)
over an integration time of 0.2s.
Rationale:
30 µrad 3sigma are sufficient according to NEOShield 1 analysis (see [RD10]) for proper
navigation provided inertial reference from Star Trackers is available.
The goal of 0.5 µrad (3sigma) assumes that the inertial reference is derived from the navigation
camera.
Note:
This is according to the ECSS standard [RD15]
NS2-IMP-160// : Delta-v thruster realization error
During all phases, the AOCS GNC shall assume a Delta-v realization error of 3% (3 sigma).
Rationale:
The Delta-v realization error results, in worst case, on incapability to maintain Impactor GNC
performance requirements. Moreover, the error results on increase of fuel budgets.
5.2 Propulsion subsystem requirements
NS2-IMP-160// : Propulsion system
For all phases a chemical propulsion system shall be used.
Rationale:
Only the chemical propulsion system provides the required thrust level for swing-by manoeuvres.
Thus a pure chemical propulsion system is a cost efficient solution for the Impactor.
5.3 Specific design requirements
NS2-IMP-170// : CoG variation
The CoG variation shall be 5 cm or less.
Rationale:
Performance requirement shall be reached and mission ensured despite CoG variation.
Note:
Sources of variation are e.g. fuel sloshing or mechanisms
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 39/63
6 Explorer Spacecraft Requirements
The requirements in this section are applicable for the Explorer of the Two-S/C KI Demo Mission. They are not applicable for the NEOTωIST Mission.
6.1 Design requirements
NS2-GEN-020// : Equipment for orbit determination
The equipment of the space segment shall support orbit determination function as required to fulfil
the primary objectives NS2-SYS-020 and NS2-SYS-030.
Rationale:
This is necessary to ensure the validation of the deflection and the determination of .
Note:
Orbit determination requires absolute (Earth to S/C) and relative (S/C to NEO) orbit
determination.
State of the art RSE techniques shall be considered for the absolute orbit determination.
State of the art equipment shall be considered to ensure relative orbit determination.
6.2 GNC/AOCS subsystem requirements
NS2-GEN-090// : General GNC requirement
The S/C should feature a GNC subsystem for the injection into the NEO vicinity and the
operations in the NEO vicinity.
Rationale:
No autonomous GNC developments for the cruise and far approach phases are considered
necessary because communications delays and ground processing (navigation, manoeuvres
generations, timeline preparation) are considered negligible wrt. durations of these phases,
therefore allowing for ground in-the-loop operations.
For mission phases starting from the close approach phase to the NEO, GNC functions with a high
degree of autonomy are considered necessary for future missions, e.g., because of S/C safety
aspects. Therefore such developments are targeted in the scope of NEOShield-2.
NS2-GEN-091// : Collision avoidance maneuver capability
In the NEO vicinity phases, the GNC/AOCS shall implement and autonomous collision detection
and avoidance capability.
Rationale:
Guarantee long-term S/C safety.
NS2-GEN-092// : Preparation for descent & landing capability
The GNC should allow implementing the preparation for descent & landing (but not including) of
the Sample Return mission.
Rationale:
Provide means to ease the implementation of REQ-MIS-0006 (and -0095 and -0096) in D3.2 (Ref
Mission Def: Sample Return) and considering the commonalities between missions’ needs (e.g.
NEO vicinity operations before descent & landing).
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 40/63
NS2-GEN-100// : Initial NEO acquisition
Before start of the far approach phase, the AOCS shall handle initial NEO acquisition considering
NEO ephemerides uncertainties.
Rationale:
The S/C approaches the NEO based on ephemerides thus the exact location of the NEO is not
known. The system shall be able to perform attitude slew manoeuvres to acquire and raster the
whole asteroid ephemerides uncertainty cloud.
Note:
After scanning the area and detecting the NEO the S/C shall perform a further approach.
NS2-GEN-110// : Pointing for initial NEO acquisition
Before start of the far approach phase, the AOCS shall control the Explorer attitude as required in
NS2-EXP-110.
Rationale:
This is necessary to handle the initial NEO acquisition as required in NS2-GEN-100.
NS2-EXP-010// : Basic Reconnaissance S/C GNC/AOCS requirements
The GNC/AOCS shall provide the following functions:
Autonomous Attitude Determination, Guidance, Control (ADCS) and FDIR.
and shall be able to support:
NEO characterization (e.g. NEO mass, size, rotational state and orbit determination)
Rationale:
Necessary functions to fulfil the mission goals.
An autonomous Attitude Determination and Control System (ADCS) is considered necessary to
handle all S/C launch and safeguard operational aspects (e.g. sun pointing, communication with
Earth). An autonomous ADCS is considered necessary during all nominal mission phases.
An autonomous NEO collision detection and avoidance function, supported by an ADCS safe
mode, is considered necessary to ensure mission safety during operations in the close vicinity of
the object.
NS2-EXP-011// : Additional Reconnaissance S/C GNC/AOCS requirements
The GNC/AOCS shall provide the following functions:
Autonomous translational GNC function during close approach and arrival (inertial
hovering for at least 6 h)
Autonomous translational body-fixed hovering GNC to support NEO surface observation
and preparation for descent & landing operations
As a goal, the GNC/AOCS should provide the following function:
Autonomous translational GNC function during close approach and arrival (inertial
hovering for at least 24 h)
Rationale:
For close approach and arrival to the NEO, it is identified the advantage of including autonomous
GNC to further ensure mission safety (considering ground delays). The value of 6h of
autonomuous inertial hovering would enable at least one of the Deep Space Network ground
stations link to be established (considering occultation due to Earth rotation).
Although not essential to mission feasibility, longer GNC autonomy (24 h or more) is seen as
attractive in order to reduce operational cost (manpower and ground station fees), and potentially
reduce the number of interruptions to science operations caused by the S/C going into collision
avoidance mode.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 41/63
The duration of autonomous translational body-fixed hovering is short wrt. communications delays
and ground processing (navigation, manoeuvres generations, timeline preparation). Therefore an
autonomous function is considered necessary. It also provides the means to ease the
implementation of REQ-MIS-0006 (and -0095 and -0096) in D3.2 (Ref Mission Def: Sample
Return) and considering the commonalities between missions’ needs (e.g. NEO vicinity operations
before descent & landing).
NS2-EXP-012// : Type of navigation
The Explorer GNC system should implement a navigation function relative to the NEO.
Rationale:
Assuming a worst case the inaccuracy of absolute navigation based on ground tracking and lack of
good knowledge of NEO ephemeris, this requirement naturally flows down from performance
demands above.
Note:
A navigation function becomes necessary on-board if autonomous translational GNC is
implemented. This would increase the degree of autonomy of the GNC system. Therefore,
autonomous GNC functions in close vicinity phases are considered as a goal development in
NEOShield-2 in order to aim a flexible solution, ensure S/C safety, and to explore options for
future missions where such functions might become necessary (e.g. in close approach to the
vicinity of an asteroid/comet/other small object and subsequent long-term operation).
NS2-EXP-020// : NEO acquisition
During far approach phase the GNC/AOCS shall be designed assuming:
Detection of NEO with visual based camera.
NEO limit apparent magnitude of 11
NEO ephemerides uncertainty of 6,000 km (3σ).
Rationale:
To ensure proper NEO acquisition during far approach phase as proposed in [RD5].
NS2-EXP-030// : Propulsion system to be used by GNC/AOCS for planetary swing-by,
approach, proximity operations and impact observation phases
As a baseline the GNC/AOCS shall use chemical propulsion for the planetary swing-by during
Cruise, for the approach phase, proximity operations and impact observation phases.
Rationale:
Only the chemical propulsion system provides the required thrust level and delta-v for these
phases and is the baseline for the Explorer during these phases as stated in NS2-EXP-320.
NS2-EXP-040// : Propulsion system to be used by GNC/AOCS for cruise phase
The GNC/AOCS shall use electric propulsion during cruise phase.
Rationale:
A solar-electric propulsion system is the most efficient solution for these phases (higher specific
impulse thus lower launch mass) and it is the baseline for the Explorer during these phases as
stated in NS2-EXP-330.
NS2-EXP-050// : Approach velocity
During close approach phase, the GNC should operate with a maximum relative approach velocity
of 5 m/s.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 42/63
Rationale:
This value is considered adequate from Reconnaissance S/C GNC analysis performed in the scope
of NEOShield-2.
NS2-EXP-060// : Position error at the end of close approach
At the end of close approach phase the maximum position error w.r.t. nominal target state should
be less than 10% (99%) in distance and maximum sun phase angle of less than 5 deg (99%).
Rationale:
Normalised wrt nominal arrival point.
NS2-EXP-070// : Velocity error at the end of close approach
At the end of close approach phase the maximum velocity error wrt nominal target state should be
less than 0.035m/s (99%), for an arrival point at a distance from NEO CoM larger than 5km
Rationale:
Requirement stated assuming failure of transition to inertial hovering mode and also collision
avoidance in case of failure after close approach has been accomplished (loose of contact, error in
mode transition, safe mode, no CAM initiated, etc.).
The proposed value ensures a safe distance within 6 h after the failures sequence. It is defined for a
minmum arrival distance, and if below than the requirement should be revisited.
NS2-EXP-080// : Initial position and velocity for close proximity
At arrival to the NEO the control function should handle an initial relative position and velocity in
accordance to maximum allowed errors defined in NS2-EXP-060 and NS2-EXP-070.
Rationale:
This value is inline with NS2-EXP-060 and NS2-EXP-070, as a subsequent phase to close
approach.
NS2-EXP-090// : Saturation of sensors
During all phases, the navigation sensors shall not saturate.
Rationale:
This is necessary to ensure that the Explorer can determine and control its orbit and attitude
autonomously.
Note 1:
Especially the camera is sensitive to saturation by Sun light. The worst case scenario of saturation
effects has to be demonstrated.
NS2-EXP-100// : Resolution for NEO shape mapping and rotational state determination
During inertial hovering phase, the GNC/AOCS should allow mapping the NEO shape and acquire
NEO rotational state with resolution of at least 1/500 of NEO size and 0.1% error, respectively
Rationale:
This value is a boundary value based on trajectory analysis for the envelope of GNC developments
(see also [RD13]).
NS2-EXP-110// : Attitude control during image acquisition, far and close approach
During sensors acquisitions, in far and close approach phases, the AOCS shall control the Explorer
attitude with an Absolute Pointing Performance Error (APE) of 500 µrad (3 sigma), and Relative
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 43/63
Pointing Performance Error (RPE) better than 0.005 deg (3σ) over an integration time of 2.5 s.
Rationale:
This is necessary to maintain the NEO in the sensor FoV and ensure a good image acquisition
during the sensor integration time.
The APE requirement is the most stringent value of the following conditions:
1) Maintain maximum asteroid size within FoV of 10.6deg, at worst-case distance of 5 * 0.9 =
4km.
2) Maintain altimeter pointing to smallest semi-major axis of the asteroid, at worst-case distance of
200km (only applicable in close approach).
The RPE requirement limits camera images blurring to 1 pixel (applicable in far and close
approach).
NS2-EXP-120// : Attitude control during camera calibration, far and close approach
During sensors calibration, in far and close approach phases, the AOCS shall control the Explorer
attitude with an Absolute Pointing Performance Error (APE) of 500 µrad (3 sigma), and Relative
Pointing Performance Error (RPE) better than 0.005 deg (3σ) over an integration time of 2.5 s.
Rationale:
This is necessary to ensure correct pointing to the desired inertial direction (e.g. with known stars
map) and ensure a good image quality for camera calibration.
NS2-EXP-150// : Attitude control during image acquisition, NEO vicinity
During sensors acquisitions, in NEO vicinity phases, the AOCS shall control the Explorer attitude
with an Absolute Pointing Performance Error better than 0.3 deg (3 sigma), and Relative Pointing
Performance Error (RPE) better than 0.0013 deg (3σ) over an integration time of 0.5s.
Rationale:
This is necessary to maintain the NEO in the sensor FoV and ensure a good image acquisition
during the sensor integration time.
The APE requirement is the most stringent value of the following conditions:
1a) keep asteroid in NAC FoV, assuming reduction 10% margin in FoV and closest distance of 5 *
0.9 = 4500m.
1b) keep asteroid in WAC FoV, assuming reduction 10% margin in FoV and closest distance of 1
* 0.9 = 900m.
2) Altimeter pointing to ~1/4 of smallest asteroid dimension, ensuring the reflecting surface is
considerably perpendicular to boresight, and at worst-case distance (5.5km).
The RPE requirement ensures 1/4 pixel accuracy in worst-case integration time.
NS2-EXP-160// : Attitude control during camera calibration, NEO vicinity
During sensors calibration, in NEO vicinity phases, the AOCS shall control the Explorer attitude
with an Absolute Pointing error better than 0.3 deg (3 sigma), and Relative Pointing Performance
Error (RPE) better than 0.0013 deg (3σ) over an integration time of 0.5s.
Rationale:
This is necessary to maintain the NEO in the sensor FoV and ensure a good camera calibration.
NS2-EXP-170// : Explorer attitude determination during image acquisition, NEO vicinity
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 44/63
During sensors acquisitions, in NEO vicinity phases, the AOCS shall determine the Explorer
attitude with Absolute Knowledge Error (AKE) better than 0.005 deg (3σ).
Rationale:
Value corresponds to a maximum error of 1 pixel (most stringent) and is considered sufficient for
attitude control. The value of 1 pixels turns this error contribution negligible wrt IP errors (having
both being ingested by navigation).
.
NS2-EXP-180// : Estimation/calibration of misalignment of cameras and star trackers
During all autonomous phases the GNC/AOCS shall estimate/calibrate the misalignment between
Navigation Cameras and Star Trackers with accuracy better than 17.5 µrad (3σ).
Rationale:
This is necessary to ensure sufficient attitude knowledge, required to properly process the image
data by ground navigation process and provides estimates for attitude control.
NS2-EXP-190// : Non-collision orbit
During all subsequent phases after arrival at NEO vicinity, the GNC shall avoid a collision with
the NEO.
Rationale:
This is necessary to avoid collision with the NEO, relying on dedicated collision detection &
avoidance functions/modes..
NS2-EXP-200// : AOCS Proximity Observation
The AOCS shall be able to operate the Explorer in close proximity of the NEO as required in NS2-
SYS-240.
Rationale:
This is derived from NS2-SYS-240 to ensure that the selected operational strategy can be
performed.
NS2-EXP-210// : GNC Proximity Observation
The GNC should be able to operate the Explorer in close proximity of the NEO as required in
NS2-SYS-240.
Rationale:
This is derived from NS2-SYS-240 to ensure that the selected operational strategy can be
performed.
Note:
It is a goal of this study to identify and explore the need of autonomous GNC functions in this
mission phases. If it is demonstrated in the study that such GNC functions are no benefit (also for
future mission scenarios), the requirement is obsolete.
NS2-EXP-220// : Maximum sun phase angle
At arrival to the NEO (during at least 6 h), the maximum sun phase angle shall be less than 25 deg
(99%).
Rationale:
Allows an illuminated area of 90% of the asteroid at all time. It is considered sufficient for IP
operation and NEO characterisation
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 45/63
NS2-EXP-221// : Mean sun phase angle
At arrival to the NEO (during at least 6h), NEO characterisation and impact observation phases the
mean sun phase angle shall be less than 18 deg (99%).
Rationale:
Allows a mean illuminated area of 95% of the asteroid, recommended for IP operation and NEO
characterisation
NS2-EXP-225// : Maximum lateral position error during body-fixed hovering
During body-fixed hovering the maximum angle to Nadir (sub-satellite point at initial surface
lock) shall be less than 10 deg (99%) for at least 1.8h.
Rationale:
Acceptable maximum error for science instruments pointing to commanded surface point (in Nadir
direction) and sufficient performance for preparation for descent/landing operations.
NS2-EXP-226// : Mean lateral position error during body-fixed hovering
During body-fixed hovering the mean absolute angle to Nadir (sub-satellite point at initial surface
lock) shall be less than 5 deg (99%) for at least 1.8h.
Rationale:
Recommended mean error for science instruments pointing to commanded surface point (in Nadir
direction).
NS2-EXP-230// : Navigation position error at arrival, close proximity and impact
observation
At arrival to the NEO (during at least 6h), the navigation position error (wrt NEO CoM) shall be
less than 10% (99%) in radial direction and ensure a maximum sun phase angle variation of 20 deg
(99%), both for at least 6h.
Rationale:
Radial: as in NS2-EXP-220, with no admissible drift (mission safety). Lateral: req is 25deg (NS2-
EXP-220), subtracted by initial sun phase angle of 5deg (NS2-EXP-080). Value considered
sufficient for control.
NS2-EXP-235// : Navigation position error in body-fixed hovering
During body-fixed hovering the navigation position error (wrt NEO CoM) shall be less than 10%
99%) in radial direction and ensure a maximum angle to Nadir of less than 5 deg (99%), both for
at least 1.8h
Rationale:
Value considered sufficient for control and sufficient performance for preparation for
descent/landing operations.
NS2-EXP-240// : Radial position error at arrival, close proximity and impact observation
At arrival to the NEO (during at least 6h), the GNC shall ensure a maximum radial position error
of 10% (99%) of the nominal distance to NEO CoM.
Rationale:
Ensure mission safety, while respecting attitude control requirements and keeping asteroid in FoV.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 46/63
NS2-EXP-245// : Radial position error in body-fixed hovering
During body-fixed hovering the GNC should ensure a radial position error less than 10% (99%) of
the distance to NEO CoM for at least 1.8h
Rationale:
Ensure mission safety, whist respecting attitude control requirements and keeping asteroid in FoV.
NS2-EXP-250// : Lateral velocity error at arrival, close proximity and impact observation
At arrival to the NEO (during at least 6h), the GNC shall ensure that themaximum lateral velocity
(wrt NEO CoM) is less than 33.4 cm/s (99%).
As a goal the lateral velocity should be less than 8.35 cm/s (99%).
Rationale:
Ensures maximum blurring of 1 pixel for most stringent case (WAC), at 1km distance. The value
is sufficient to become negligible wrt other error sources (attitude, IP) and considered sufficient
for NEO characterisation. As a goal, blurring of 1/4 pixel.
The value is derived from simple trigonometric calculations, and equally allocated between
translational and rotational errors
Note:
This requirement is only applicable in case of autonomous control during these phases. Otherwise
the ground station will define the S/C position and attitude.
NS2-EXP-260// : System gain and phase stability margins during close proximity
In NEO vicinity phases with autonomous GNC/AOCS functions, the system gain and phase
stability margins shall be at least 6 dB and 30 deg, respectively..
Rationale:
According to [RD15].
NS2-EXP-270// : AOCS functions for impact observation phase safe position
Prior to impact observation phase, the AOCS functions shall support the required manoeuvres
needed to place the Explorer on a safe position.
Rationale:
This is required to achieve NS2-SYS-240 and NS2-SYS-250.
NS2-EXP-280// : GNC function for impact observation phase safe position
Prior to impact observation phase, the GNC should be able to place the Explorer on a safe position
as stated in NS2-SYS-250.
Rationale:
This is required to achieve NS2-SYS-240 and NS2-SYS-250..
Note:
This requirement is only applicable in case of autonomous translational control. If it is
demonstrated in the scope of this study that such GNC functions are no benefit (also for future
mission scenarios), the requirement is obsolete. In this case the ground station will define the S/C
position.
NS2-EXP-290// : Successive imaging during observation
During impact observation phase, the GNC/AOCS shall allow taking successive images of the
impact area.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 47/63
Rationale:
This is necessary to ensure the maximum scientific benefit w.r.t. impact observation.
NS2-EXP-300// : Autonomy of GNC
In the NEO vicinity the GNC shall autonomously handle collision detection and avoidance..
Rationale:
Close vicinity operation requires immediate reaction due to communications delays (both ways) ,
ground processing (navigation, manoeuvres generations, timeline preparation and therefore ground
in-the-loop operations are not considered adequate.. Thus an autonomous system is required to
handle unforeseen events.
NS2-EXP-310// : Autonomy of AOCS
During all phases, the AOCS shall autonomously handle Attitude Determination, Guidance,
Control (ADCS) and FDIR. In addition, during cruise phase, it should cope with a 4-month ground
communications outage due to solar conjunction.
Rationale:
Due to the large distances the control of the Explorer via ground in real-time is not possible. Thus
an autonomous system is required to handle non-nominal operations (other than those controlled
from ground) and recover from unforeseen events.
NS2-EXP-350// : Delta-v thruster realization error
During all phases, the GNC shall assume a maximum Delta-v realization error of 5% (3 sigma).
Rationale:
The Delta-v realization error knowledge might result on the incapability to maintain GNC
performance requirements.
NS2-EXP-360// : ADCS SW compatibility
The ADCS application SW as part of the AOCS/GNC subsystem shall be compatible with a space
qualified avionics platform defined at system level
Rationale:
Ensure the SW is compatible with representative avionics architecture and implementation.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
NS2-EXP-370// : FDIR SW compatibility
The FDIR application SW as part of the AOCS/GNC subsystem shall be compatible with a space
qualified avionics platform defined at system level.
Rationale:
Ensure the SW is compatible with representative avionics architecture and implementation.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
NS2-EXP-380// : GNC SW compatibility
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 48/63
The GNC application SW as part of the AOCS/GNC subsystem shall be compatible with a space
qualified avionics platform defined at system level.
Rationale:
Ensure the SW is compatible with representative avionics architecture and implementation.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
NS2-EXP-390// : Completeness of ADCS APSW
The ADCS application SW shall implement the ADCS algorithms, and both ensure that
GNC/AOCS functional and performance requirements are met.
Rationale:
Ensure that the SW correctly implements the respective algorithms, and when subject to real-time
non-idealities, the co-engineered work fulfils the functional and performance requirements for the
GNC/AOCS subsystem.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
NS2-EXP-400// : : Completeness of FDIR APSW
The FDIR application SW shall ensure that FDIR requirements are met.
Rationale:
Ensure that the SW correctly implements the respective algorithms, and when subject to real-time
non-idealities, the co-engineered work fulfils the functional and performance requirements for the
GNC/AOCS subsystem.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
NS2-EXP-410// : : Completeness of GNC APSW
The GNC application SW shall implement the GNC algorithms, and both ensure that GNC
functional and performance requirements are met.
Rationale:
Ensure that the SW correctly implements the respective algorithms, and when subject to real-time
non-idealities, the co-engineered work fulfils the functional and performance requirements for the
GNC/AOCS subsystem.
Note:
The achievement of TRL 5/6 can be fulfilled with representative commercial grade equipment of
the critical units used by the involved functions.
6.3 Propulsion subsystem requirements
NS2-EXP-320// : Propulsion for cruise, approach, close proximity and impact observation
For the planetary swing-by during cruise, for approach, close proximity and impact observation
phases a chemical propulsion system shall be used.
Rationale:
A chemical propulsion system is the baseline for the Explorer during planetary swing-by’s, for
close proximity and impact observation phases due to the high thrust level.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 49/63
Note:
This requirement is not applicable for an NEOTωIST Mission.
NS2-EXP-330// : Propulsion for cruise
For cruise phase (except the manoeuvres for swing-by) a solar electric propulsion shall be used.
Rationale:
A solar electric propulsion system is the baseline for the Explorer during cruise and approach
phases due to the high specific impulse.
Note:
This requirement is not applicable for an NEOTωIST Mission.
6.4 Specific design requirements
NS2-EXP-340// : Micro vibration during image acquisition
During image acquisition, the system shall not actuate antenna, solar arrays or the propulsion
system.
Rationale:
This is necessary to ensure a minimum of micro vibrations thus to ensure the quality of the images.
Note:
A specific value for the micro vibration shall be determined in a future Phase A study.
Note:
This requirement is not applicable for an NEOTωIST Mission.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 50/63
7 NEOTωIST Spacecraft Requirements
7.1 GNC/AOCS subsystem requirements
NS2-NTI-010// : Performance requirement
The Impactor shall feature a GNC/AOCS system for both transfer to the NEO and the impact on
the NEO with an accuracy as required in NS2- MRD -220.
Rationale:
This is necessary to ensure that the GNC/AOCS performance corresponds to NS2- MRD -220.
Note:
As a goal the impact accuracy with respect to the point defined in NS2-MRD-220 should be
significantly better than the required performance.
NS2-NTI-020// : GNC Autonomy level
The Impactor shall implement a fully autonomous navigation, guidance and control function for
the last 24 hours of its life.
Rationale:
On the JUICE mission, 72 hours delay cut off before a fly-by (similar to an impact but with a
voluntarily increased miss-range) are considered for an update of the navigation state by ground
available at closest-apporach-24h (48h processing). This is conservative considering ESOC
operational margins, thus the same value is chosen here. Note that the same is observed on Mars
re-entry scenario with typically a last correction manoeuvre at EIP-24h. This value seems therefore
relevant as basic assumption for NEOShield-2. Without margin, ESOC can also complete a
navigation analysis in 8 hours according to work performed for instance for Footprint-QSO or
Rosetta. For Mars re-entry an update of parameters can be performed a few hours before EIP so
there are possibilities to relax this requirement. Thus the 24h assumption is rather conservative as
emergency or contingency ground intervention would be possible up to 6-8 hours before impact, in
which case the autonomous behaviour can be monitored during the first half or more of the
endgame to ensure proper behaviour.
NS2-NTI-030// : Propellant requirement
The Impactor shall accommodate sufficient propellant mass to guarantee autonomous terminal
guidance and control in the last 24 hours.
Rationale:
Less than 15 m/s ΔV is required for terminal guidance in the impact scenario for the demo mission
target (2001 QC34), according to simulations carried out for this case. This is however dependent
on the mission scenario and is just a baseline. In order to convert this ΔV into propellant mass, the
efficiency of the thruster configuration must be considered in the rocket equation. The value in
terms of mass is therefore not provided as it would impose constraints both on the thruster
configuration and the propellant system, which is not the purpose of a specification at this level.
Note:
The terminal phase or endgame phase of the impactor spacecraft is the time just before the impact,
where crucial corrections to ensure a proper impact are autonomously performed
NS2-NTI-040// : Last manoeuvre and control authority
The Impactor control system shall have sufficient control authority to be able to deliver a last
correction manoeuvre in the 50 s before impact.
Rationale:
This is needed to increase the robustness according to preliminary assessment carried out in
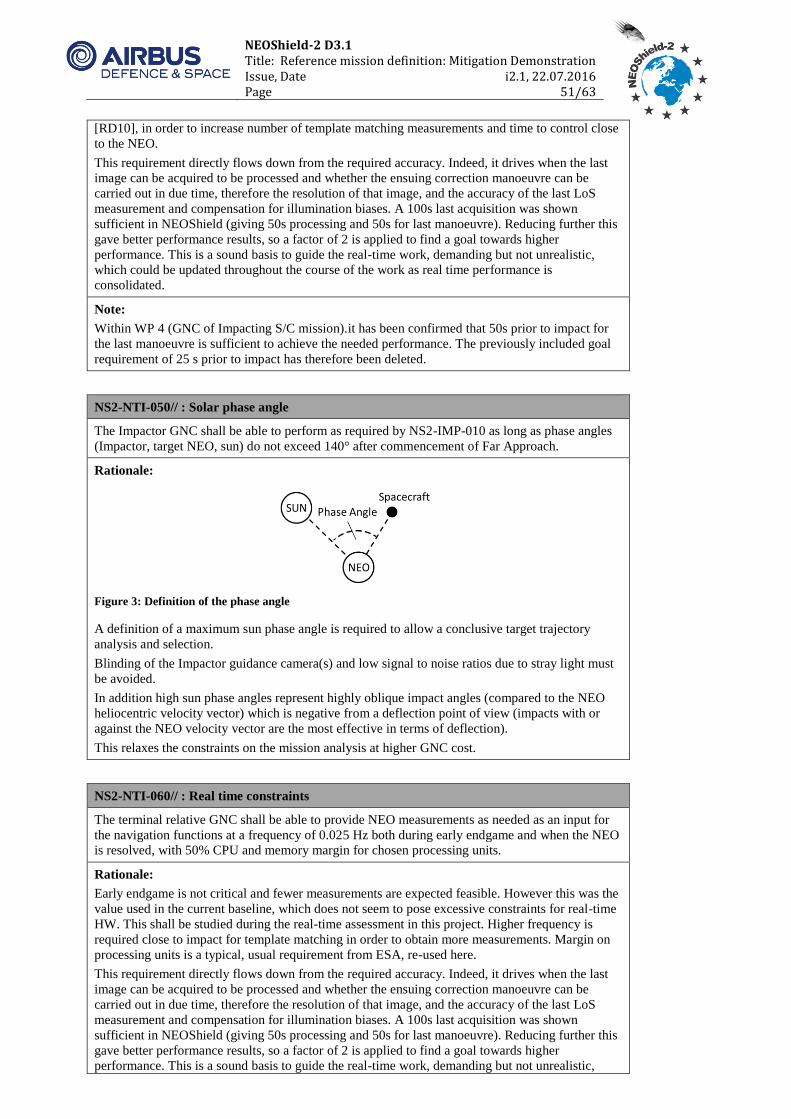
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 51/63
[RD10], in order to increase number of template matching measurements and time to control close
to the NEO.
This requirement directly flows down from the required accuracy. Indeed, it drives when the last
image can be acquired to be processed and whether the ensuing correction manoeuvre can be
carried out in due time, therefore the resolution of that image, and the accuracy of the last LoS
measurement and compensation for illumination biases. A 100s last acquisition was shown
sufficient in NEOShield (giving 50s processing and 50s for last manoeuvre). Reducing further this
gave better performance results, so a factor of 2 is applied to find a goal towards higher
performance. This is a sound basis to guide the real-time work, demanding but not unrealistic,
which could be updated throughout the course of the work as real time performance is
consolidated.
Note:
Within WP 4 (GNC of Impacting S/C mission).it has been confirmed that 50s prior to impact for
the last manoeuvre is sufficient to achieve the needed performance. The previously included goal
requirement of 25 s prior to impact has therefore been deleted.
NS2-NTI-050// : Solar phase angle
The Impactor GNC shall be able to perform as required by NS2-IMP-010 as long as phase angles
(Impactor, target NEO, sun) do not exceed 140° after commencement of Far Approach.
Rationale:
Figure 3: Definition of the phase angle
A definition of a maximum sun phase angle is required to allow a conclusive target trajectory
analysis and selection.
Blinding of the Impactor guidance camera(s) and low signal to noise ratios due to stray light must
be avoided.
In addition high sun phase angles represent highly oblique impact angles (compared to the NEO
heliocentric velocity vector) which is negative from a deflection point of view (impacts with or
against the NEO velocity vector are the most effective in terms of deflection).
This relaxes the constraints on the mission analysis at higher GNC cost.
NS2-NTI-060// : Real time constraints
The terminal relative GNC shall be able to provide NEO measurements as needed as an input for
the navigation functions at a frequency of 0.025 Hz both during early endgame and when the NEO
is resolved, with 50% CPU and memory margin for chosen processing units.
Rationale:
Early endgame is not critical and fewer measurements are expected feasible. However this was the
value used in the current baseline, which does not seem to pose excessive constraints for real-time
HW. This shall be studied during the real-time assessment in this project. Higher frequency is
required close to impact for template matching in order to obtain more measurements. Margin on
processing units is a typical, usual requirement from ESA, re-used here.
This requirement directly flows down from the required accuracy. Indeed, it drives when the last
image can be acquired to be processed and whether the ensuing correction manoeuvre can be
carried out in due time, therefore the resolution of that image, and the accuracy of the last LoS
measurement and compensation for illumination biases. A 100s last acquisition was shown
sufficient in NEOShield (giving 50s processing and 50s for last manoeuvre). Reducing further this
gave better performance results, so a factor of 2 is applied to find a goal towards higher
performance. This is a sound basis to guide the real-time work, demanding but not unrealistic,
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 52/63
which could be updated throughout the course of the work as real time performance is
consolidated.
Note:
The minimum frequency numbers must allow proper targeting functionality and shall be inserted
to the requirement above.
Note (13.06.2016): Within WP 4 (GNC of Impacting S/C mission) it has been determined that a
frequency of 0.025 Hz is sufficient throughout the endgame phase. The goal requirement of 0.05
Hz in the resolved phase has therefore been removed.
NS2-NTI-070// : Impactor CoG knowledge
The terminal GNC shall maintain required performance even with 5 cm maximum Impactor CoG
knowledge uncertainty.
Rationale:
This is the assessed Impactor CoG knowledge uncertainty due to current design with attached
Soyuz stage. This is sufficient according to [RD10] analysis with a margin of factor 2.
NS2-NTI-080// : Provide targeting data to Impactor
The data required by the Impactor GNC (NEO size, three dimensional geometry and rotational
state) shall be provided in required format prior to the Close Approach & Endgame phase.
Rationale:
The Impactor GNC depends on the detailed reconnaissance data gathered by ground station or an
accompanying S/C (e.g. the Explorer) to reach required high accuracy targeting performance.
Note:
This data can either be directly sent from the ground station or an accompanying S/C (e.g. the
Explorer).
The current requirement shall make sure that the provision of targeting data is requested on a high
level. An analysis in WP 4 shall enable a break down of more detailed requirements with specific
values on lower level.
NS2-NTI-090 // : Endgame imaging
During the Close Approach & Endgame phase the Impactor shall transmit regular (interval is
TBD) images with increasing rate of the impact location to the ground station or an accompanying
S/C (e.g. the Explorer) in order to support posteriori determination and verification of the impact
point.
Rationale:
An image sequence of the last moments before impact from the Impactor perspective is important
to evaluate the impact effects posteriori and is a valuable information in case of failure or
unexpected behaviour. The impact location itself can also be detected retrospectively via the
Explorer.
NS2-NTI-100 // : Endgame GNC engineering data
During the Close Approach & Endgame phase the Impactor shall provide GNC engineering data
(e.g. attitude, attitude change rate) to the ground station or an accompanying S/C
Rationale:
Transmission of GNC engineering data is very valuable for GNC performance assessment and
lessons learned.
Note:
This will be limited by the short time-span of the final actions.
Low volume data:
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 53/63
Intermediate results of image processing function (reduced log file)
Measured target LoS in camera frame
Measured target LoS in inertial frame
Estimated navigation state
Navigation state error covariance
Sensor health status
Commanded manoeuvres amplitude and direction
Actuator health status
High volume data (require high capability link, for instance with orbiter):
Full images if possible or asteroid search windows to limit data amount
NS2-NTI-110// : AOCS autonomy level
The Impactor shall implement a fully autonomous AOCS function for the last 24 hours of its life.
Rationale:
Classical ground operations delays indicate that on a day before impact (or more) ground
intervention is not possible and autonomous AOCS is required beyond this date (stopping
operations one day before impact would never guarantee sufficient impact accuracy).
On the JUICE mission, 72 hours delay cut off before a fly-by (similar to an impact but with a
voluntarily increased miss-range) are considered for an update of the navigation state by ground
available at closest-apporach-24h (48h processing). This is conservative considering ESOC
operational margins, thus the same value is chosen here. Note that the same is observed on Mars
re-entry scenario with typically a last correction manoeuvre at EIP-24h. This value seems therefore
relevant as basic assumption for NEOShield-2. Without margin, ESOC can also complete a
navigation analysis in 8 hours according to work performed for instance for Footprint QSO or
Rosetta. For Mars re-entry an update of parameters can be performed a few hours before EIP so
there are possibilities to relax this requirement. Thus the 24h assumption is rather conservative as
emergency or contingency ground intervention would be possible up to 6-8 hours before impact, in
which case the autonomous behaviour can be monitored during the first half or more of the
endgame to ensure proper behaviour.
NS2-NTI-120// : Stabilization
The Impactor shall be three-axis stabilized during endgame phase.
Rationale:
In order to ensure corrections in the right direction during endgame, three-axis stabilization is
needed and spin stabilization is unrealistic. This is a requirement for endgame. For cruise this is
also required but it is more a design choice for proper orientation of non-steerable solar array and
antennas and this type of requirement is therefore not desirable at this level.
NS2-NTI-130// : Mean pointing error
The Impactor attitude determination and control system should be able to maintain its attitude
w.r.t. the target NEO on all three axes with a Mean Pointing Error of less than 0.1 deg (3 sigma).
Rationale:
This is needed on relative navigation sensor cross-axis to maintain the target in a confined region
of sensor FoV. This is to be confirmed depending on the selected FoV, which is a design choice,
and the proposed value is consistent with the current proposed demo mission design. Around
sensor boresight axis, the specification could be relaxed for imaging but needs to be close to the
indicated value to avoid excessive control errors.
Note:
This is according to the ECSS standard [RD15]
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 54/63
NS2-NTI-140// : Relative pointing error
During detection phase, the Impactor attitude determination and control system shall be able to
maintain its attitude w.r.t. the target NEO on all three axes with a Relative Pointing Error (RPE) of
less than 10 µrad (3 sigma) over an integration time of 1s.
Rationale:
30 µrad 3sigma are sufficient according to NEOShield 1 analysis (see [RD10]) for proper
navigation provided inertial reference from Star Trackers is available.
The goal of 0.5 µrad (3sigma) assumes that the inertial reference is derived from the navigation
camera.
Note:
This is according to the ECSS standard [RD15]
Note 13.06.16
Updated values out of WP4 analysis. 30 µrad (3 sigma) over an integration time of 0.2s replaced
with values above.
Goal requirement not needed and removed (RPE less than 0.5 µrad (3sigma) over an integration
time of 0.2s).
NS2-NTI-150// : Control accuracy of impact time
The control accuracy of the impact time shall be better than +/-6 minutes (TBC) with regard to the
nominal impact time.
Rationale:
Due to the rotation of the Itokawa, an error in impact time results in an error of impact geometry
(impact surface incident angle & effective lever arm with respect to centre of mass). The impact
incident angle error, which is determined by the rotational position of Itokawa and the local
surface topography at impact site, must be limited to ensure an effective beta-factor. +/- 6 minutes
corresponds to an error contribution of +/- 3 degrees from the rotational state of Itokawa. The
corresponding change in effective lever arm is smaller than 10 meters for considered impact sites.
Note:
The +/-6 min (TBC) are based on a first reasonable assumption and have to be verified in future
projects with more detailed simulations.
NS2-NTI-160// : Delta-v thruster realization error
During all phases, the AOCS GNC shall assume a Delta-v realization error of 3% (3 sigma).
Rationale:
The Delta-v realization error results, in worst case, on incapability to maintain Impactor GNC
performance requirements. Moreover, the error results on increase of fuel budgets.
7.2 Propulsion subsystem requirements
NS2-NTI-160// : Propulsion system
For all phases a chemical propulsion system shall be used.
Rationale:
Only the chemical propulsion system provides the required thrust level for swing-by manoeuvres.
Thus a pure chemical propulsion system is a cost efficient solution for the Impactor.
7.3 Specific design requirements
NS2-NTI-170// : CoG variation

NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 55/63
The Impactor CoG variation, after Observer separation, shall be 5 cm or less.
Rationale:
Performance requirement shall be reached and mission ensured despite CoG variation.
Note:
Sources of variation are e.g. fuel sloshing or mechanisms
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 56/63
8 Programmatic & Standards
8.1 TRL and Availability
NS2-PAS-010// : TRL definitions
The TRL definitions shall be as from in [RD1]
Rationale:
This is a standard approach to ensure common understanding of technological maturity.
NS2- PAS-020// : TRL level to reach
All spacecraft components and payload items shall reach TRL 6 by the end of the definition phase
(Phase A/B1).
Rationale:
This is a standard approach to ensure the readiness of technology.
8.2 Schedule
NS2- PAS-030// : Schedule compatibility
The schedule for Phases A/B/C/D shall be compatible with the launch date constrained in NS2-
SYS-310
Rationale:
This is required to ensure that the development, manufacturing and testing is in line with the
launch date.
8.3 Cost
At this stage of the NEOShield-2 project the political and programmatic frame is still open. However, the NEOShield-2 demonstration mission shall be implemented in the most cost efficient way in order to achieve the mission objectives.
8.4 Standards
NS2-PAS-040// : SI system
The SI international system of units shall be used. Radians, degrees, arc-minutes and arcseconds
are acceptable as angle units. All (sub)-multiples by factors of 10 of any of the above mentioned
units are also acceptable.
Rationale:
This is a standard approach to ensure common units.
NS2-PAS-050// : ESA standards
The published list of ESA approved standards [AD1], including approved ECSS standards, shall
apply throughout the NEOShield-2 technology development work packages, and are available at:
http://ecss.nl/.
Rationale:
This is a standard approach to ensure common and well acknowledged standards.
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 57/63
NS2-PAS-060// : Margin policy
For the initial phases of the study, the margin policy described in [AD5] shall be applied.
Rationale:
This is a standard approach to ensure sufficient margin at all levels.
NS2-PAS-070// : Right-handed coordinate systems
All reference frames shall be right-handed orthonormal triads.
Rationale:
This is a standard approach to ensure common reference frames.
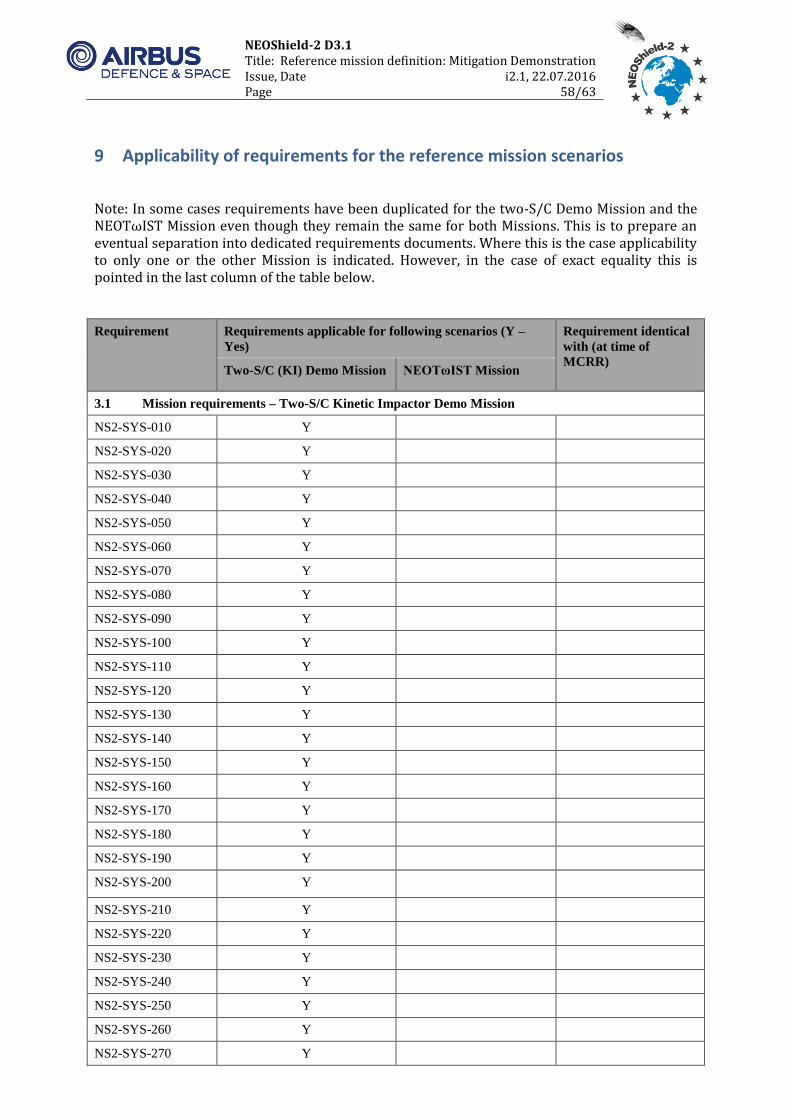
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 58/63
9 Applicability of requirements for the reference mission scenarios
Note: In some cases requirements have been duplicated for the two-S/C Demo Mission and the NEOTωIST Mission even though they remain the same for both Missions. This is to prepare an eventual separation into dedicated requirements documents. Where this is the case applicability to only one or the other Mission is indicated. However, in the case of exact equality this is pointed in the last column of the table below.
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
3.1 Mission requirements – Two-S/C Kinetic Impactor Demo Mission
NS2-SYS-010 Y
NS2-SYS-020 Y
NS2-SYS-030 Y
NS2-SYS-040 Y
NS2-SYS-050 Y
NS2-SYS-060 Y
NS2-SYS-070 Y
NS2-SYS-080 Y
NS2-SYS-090 Y
NS2-SYS-100 Y
NS2-SYS-110 Y
NS2-SYS-120 Y
NS2-SYS-130 Y
NS2-SYS-140 Y
NS2-SYS-150 Y
NS2-SYS-160 Y
NS2-SYS-170 Y
NS2-SYS-180 Y
NS2-SYS-190 Y
NS2-SYS-200 Y
NS2-SYS-210 Y
NS2-SYS-220 Y
NS2-SYS-230 Y
NS2-SYS-240 Y
NS2-SYS-250 Y
NS2-SYS-260 Y
NS2-SYS-270 Y
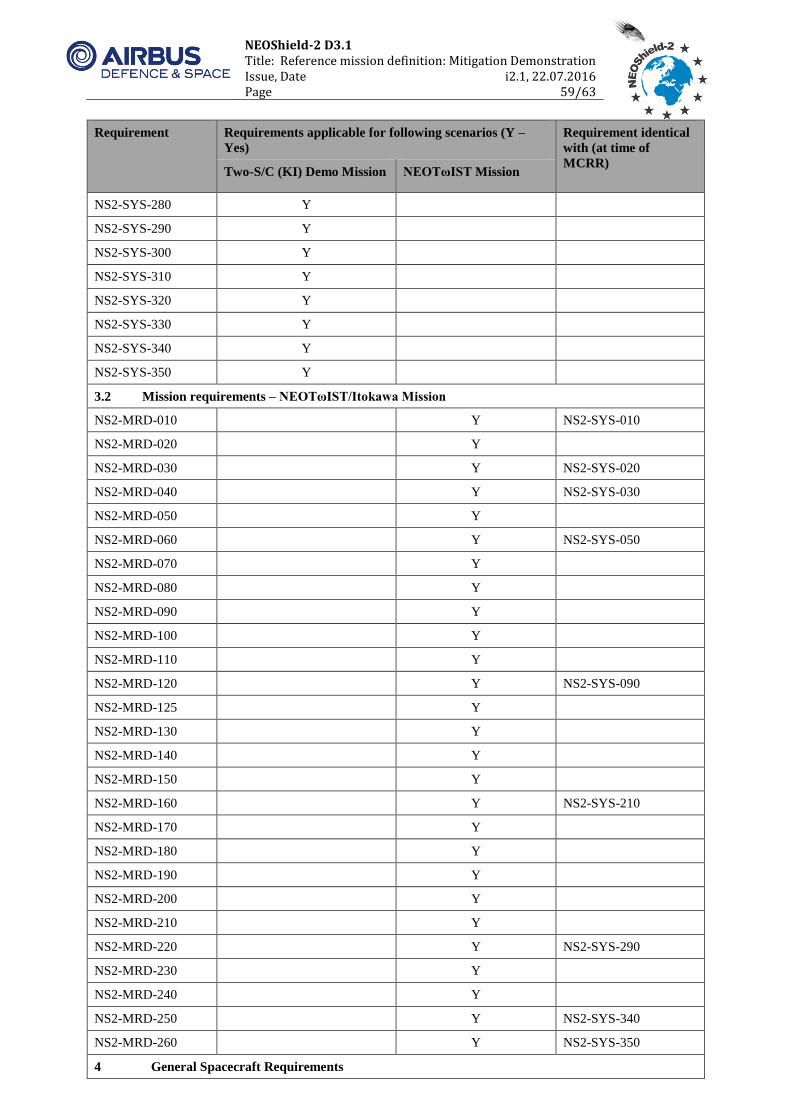
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 59/63
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
NS2-SYS-280 Y
NS2-SYS-290 Y
NS2-SYS-300 Y
NS2-SYS-310 Y
NS2-SYS-320 Y
NS2-SYS-330 Y
NS2-SYS-340 Y
NS2-SYS-350 Y
3.2 Mission requirements – NEOTωIST/Itokawa Mission
NS2-MRD-010 Y NS2-SYS-010
NS2-MRD-020 Y
NS2-MRD-030 Y NS2-SYS-020
NS2-MRD-040 Y NS2-SYS-030
NS2-MRD-050 Y
NS2-MRD-060 Y NS2-SYS-050
NS2-MRD-070 Y
NS2-MRD-080 Y
NS2-MRD-090 Y
NS2-MRD-100 Y
NS2-MRD-110 Y
NS2-MRD-120 Y NS2-SYS-090
NS2-MRD-125 Y
NS2-MRD-130 Y
NS2-MRD-140 Y
NS2-MRD-150 Y
NS2-MRD-160 Y NS2-SYS-210
NS2-MRD-170 Y
NS2-MRD-180 Y
NS2-MRD-190 Y
NS2-MRD-200 Y
NS2-MRD-210 Y
NS2-MRD-220 Y NS2-SYS-290
NS2-MRD-230 Y
NS2-MRD-240 Y
NS2-MRD-250 Y NS2-SYS-340
NS2-MRD-260 Y NS2-SYS-350
4 General Spacecraft Requirements
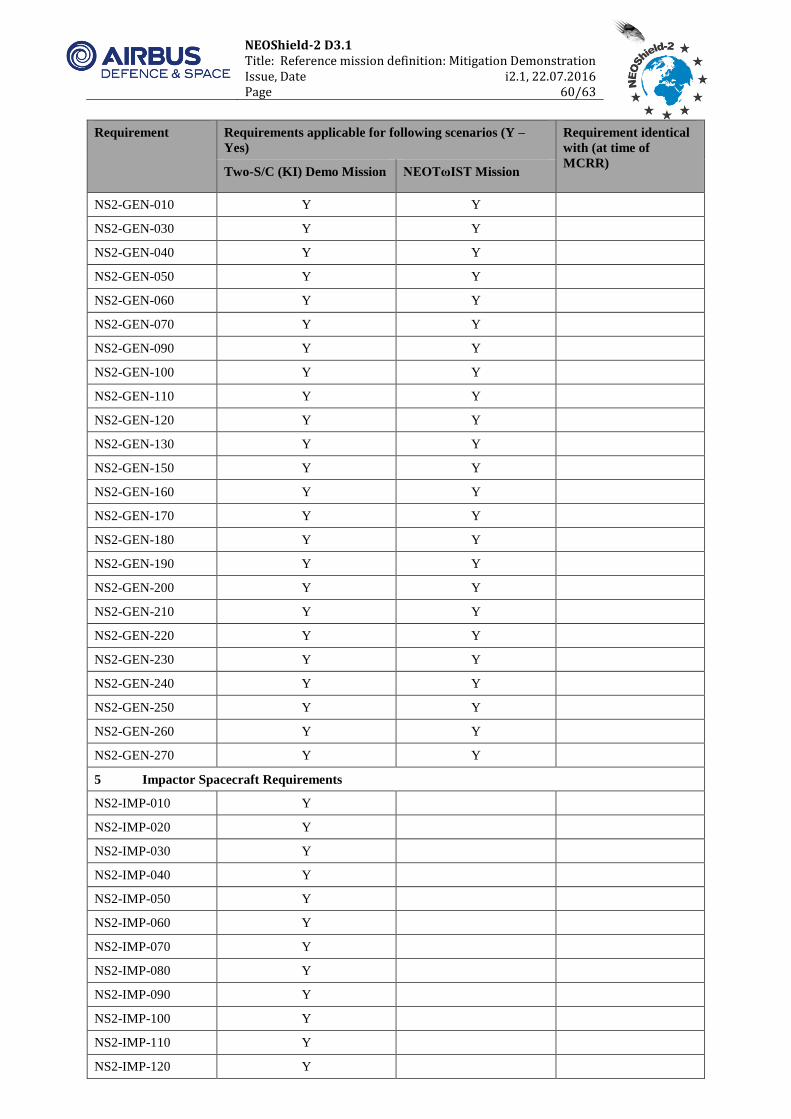
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 60/63
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
NS2-GEN-010 Y Y
NS2-GEN-030 Y Y
NS2-GEN-040 Y Y
NS2-GEN-050 Y Y
NS2-GEN-060 Y Y
NS2-GEN-070 Y Y
NS2-GEN-090 Y Y
NS2-GEN-100 Y Y
NS2-GEN-110 Y Y
NS2-GEN-120 Y Y
NS2-GEN-130 Y Y
NS2-GEN-150 Y Y
NS2-GEN-160 Y Y
NS2-GEN-170 Y Y
NS2-GEN-180 Y Y
NS2-GEN-190 Y Y
NS2-GEN-200 Y Y
NS2-GEN-210 Y Y
NS2-GEN-220 Y Y
NS2-GEN-230 Y Y
NS2-GEN-240 Y Y
NS2-GEN-250 Y Y
NS2-GEN-260 Y Y
NS2-GEN-270 Y Y
5 Impactor Spacecraft Requirements
NS2-IMP-010 Y
NS2-IMP-020 Y
NS2-IMP-030 Y
NS2-IMP-040 Y
NS2-IMP-050 Y
NS2-IMP-060 Y
NS2-IMP-070 Y
NS2-IMP-080 Y
NS2-IMP-090 Y
NS2-IMP-100 Y
NS2-IMP-110 Y
NS2-IMP-120 Y
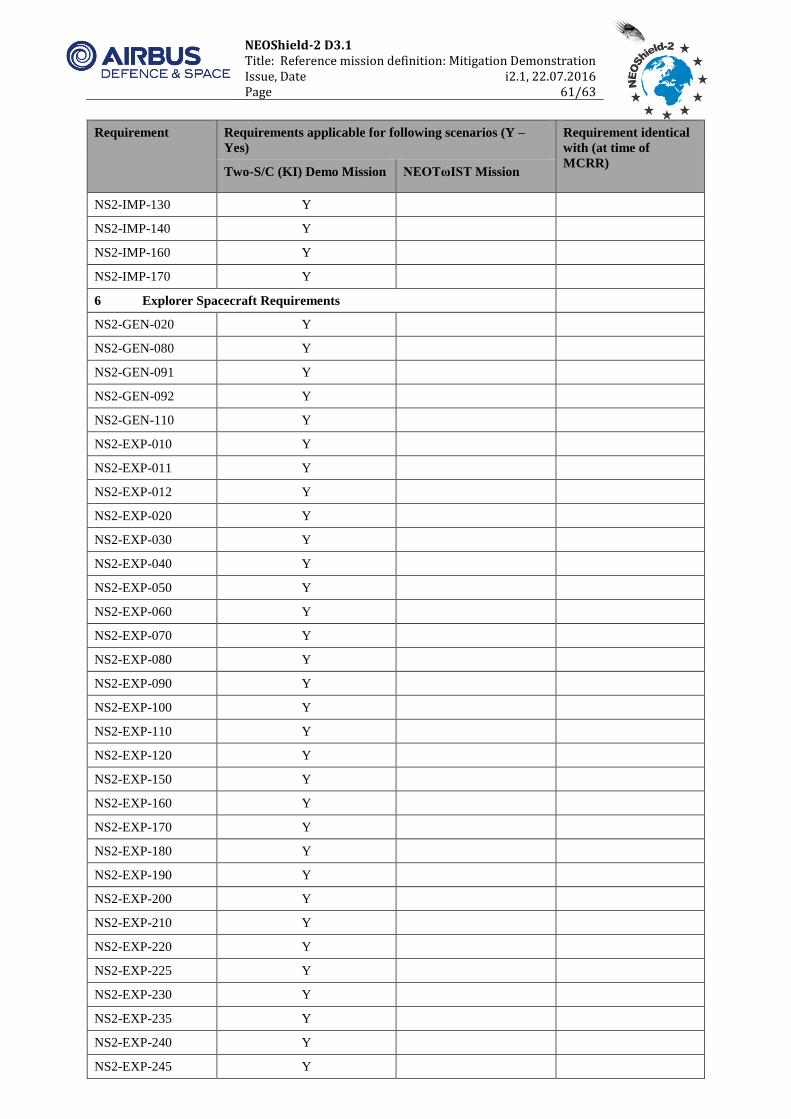
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 61/63
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
NS2-IMP-130 Y
NS2-IMP-140 Y
NS2-IMP-160 Y
NS2-IMP-170 Y
6 Explorer Spacecraft Requirements
NS2-GEN-020 Y
NS2-GEN-080 Y
NS2-GEN-091 Y
NS2-GEN-092 Y
NS2-GEN-110 Y
NS2-EXP-010 Y
NS2-EXP-011 Y
NS2-EXP-012 Y
NS2-EXP-020 Y
NS2-EXP-030 Y
NS2-EXP-040 Y
NS2-EXP-050 Y
NS2-EXP-060 Y
NS2-EXP-070 Y
NS2-EXP-080 Y
NS2-EXP-090 Y
NS2-EXP-100 Y
NS2-EXP-110 Y
NS2-EXP-120 Y
NS2-EXP-150 Y
NS2-EXP-160 Y
NS2-EXP-170 Y
NS2-EXP-180 Y
NS2-EXP-190 Y
NS2-EXP-200 Y
NS2-EXP-210 Y
NS2-EXP-220 Y
NS2-EXP-225 Y
NS2-EXP-230 Y
NS2-EXP-235 Y
NS2-EXP-240 Y
NS2-EXP-245 Y
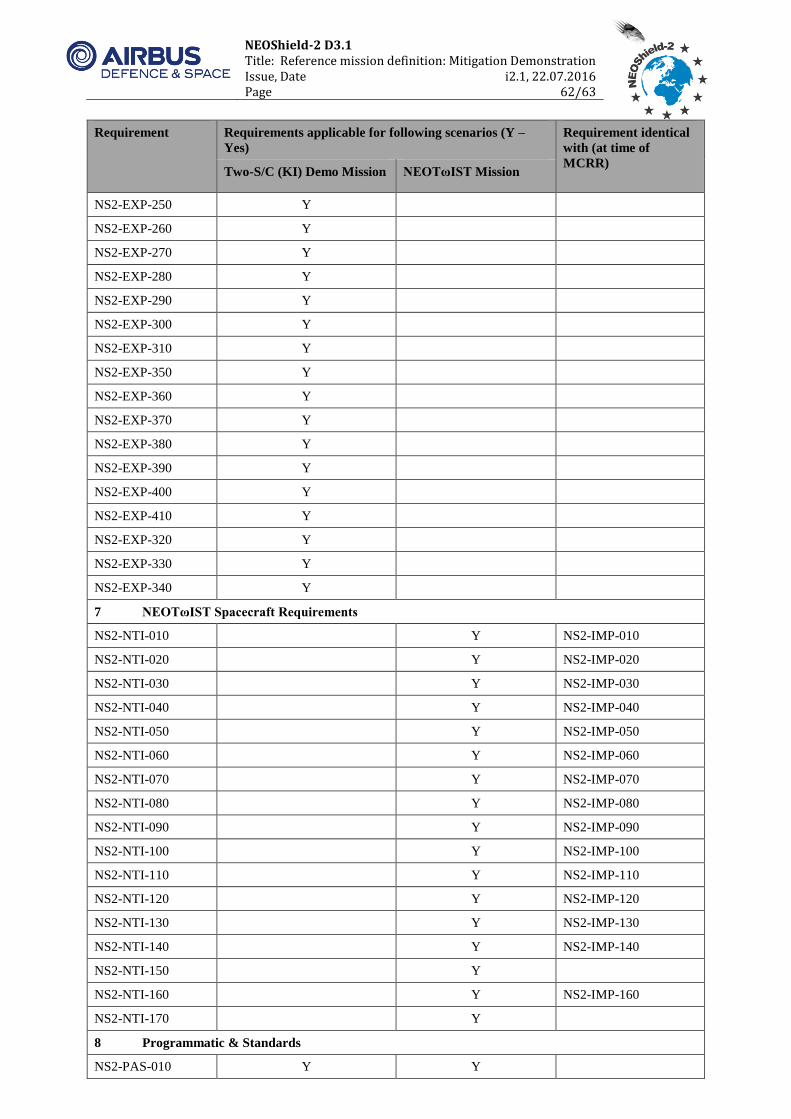
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 62/63
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
NS2-EXP-250 Y
NS2-EXP-260 Y
NS2-EXP-270 Y
NS2-EXP-280 Y
NS2-EXP-290 Y
NS2-EXP-300 Y
NS2-EXP-310 Y
NS2-EXP-350 Y
NS2-EXP-360 Y
NS2-EXP-370 Y
NS2-EXP-380 Y
NS2-EXP-390 Y
NS2-EXP-400 Y
NS2-EXP-410 Y
NS2-EXP-320 Y
NS2-EXP-330 Y
NS2-EXP-340 Y
7 NEOTωIST Spacecraft Requirements
NS2-NTI-010 Y NS2-IMP-010
NS2-NTI-020 Y NS2-IMP-020
NS2-NTI-030 Y NS2-IMP-030
NS2-NTI-040 Y NS2-IMP-040
NS2-NTI-050 Y NS2-IMP-050
NS2-NTI-060 Y NS2-IMP-060
NS2-NTI-070 Y NS2-IMP-070
NS2-NTI-080 Y NS2-IMP-080
NS2-NTI-090 Y NS2-IMP-090
NS2-NTI-100 Y NS2-IMP-100
NS2-NTI-110 Y NS2-IMP-110
NS2-NTI-120 Y NS2-IMP-120
NS2-NTI-130 Y NS2-IMP-130
NS2-NTI-140 Y NS2-IMP-140
NS2-NTI-150 Y
NS2-NTI-160 Y NS2-IMP-160
NS2-NTI-170 Y
8 Programmatic & Standards
NS2-PAS-010 Y Y
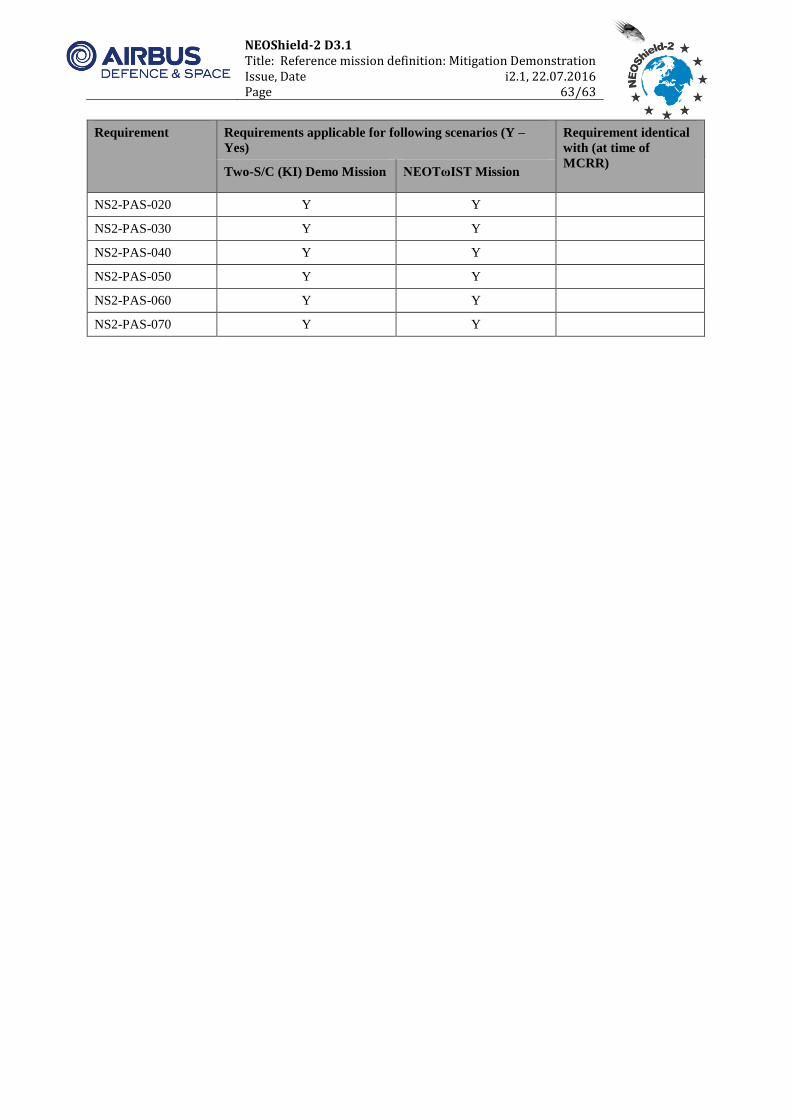
NEOShield-2 D3.1 Title: Reference mission definition: Mitigation Demonstration Issue, Date i2.1, 22.07.2016 Page 63/63
Requirement Requirements applicable for following scenarios (Y –
Yes)
Requirement identical
with (at time of
MCRR) Two-S/C (KI) Demo Mission NEOTωIST Mission
NS2-PAS-020 Y Y
NS2-PAS-030 Y Y
NS2-PAS-040 Y Y
NS2-PAS-050 Y Y
NS2-PAS-060 Y Y
NS2-PAS-070 Y Y