Embed Size (px)
DESCRIPTION
modeling and analysis of electrical machines ....mtech 1st sem subject chapter 3 notes
Citation preview

Chapter – 3
Reference Frame
Theory
Prof. B. S. Sree Shailan

• Imagination is more important than knowledge.
- Albert Einstein
• It is not work that kills men, it is worry. Work is
healthy; You can hardly put more on a man than
he can bear. But worry is rust upon the blade.
It is not movement that destroys the machine,
but friction.
- Henry Ward Beecher
BSS
2

Topics to be covered• Real time model of a two phase
induction machine.
• Transformation to obtain constant
matrices.
• Three phase to two phase
transformation.
• Power equivalence.
Book: Electric Motor Drives by R. Krishnan
BSS
3

Introduction• Power of Reference Frame Theory:
Eliminates Rotor Position Dependence –
Inductances and Capacitances
Transforms Nonlinear Systems to Linear
Systems for Certain Cases
Fundamental Tool For Rigorous Development of
Equivalent Circuits
Can Be Used to Make AC Quantities Become DC
Quantities
Framework of Most Controllers
BSS
4

History of Reference Frame Theory
• 1929: Park’s Transformation
Synchronous Machine; Rotor Reference Frame
• 1938: Stanley
Induction Machine; Stationary Reference Frame
• 1951: Kron
Induction Machine; Synchronous Reference Frame
• 1957: Brereton
Induction Machine; Rotor Reference Frame
• 1965: Krause
Arbitrary Reference Frame
BSS
5

Real-Time model of 2-ф Induction M/c
• Assumptions:
– Uniform air gap
– Balanced rotor and stator windings with
sinusoidal distributed mmf
– Inductance w. r. t. rotor position is sinusoidal
– Saturation and parameter changes are
neglected
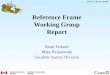
• Windings are displaced in space by 900 electrical
and rotor winding α is at an angle θr from the
stator d-axis winding.
BSS
6

• Number of turns per
phase in the stator and
rotor windings are
respectively T1 & T2.
Stator and rotor windings of a two-
phase induction motor
• Terminal voltages can
be expressed as the
sum of voltage drops in
resistances & rate of
change of flux linkages.
BSS
7

• Under the assumption of uniform air gap, the
self inductances are independent of angular
positions & hence they are constants.
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
• :
qs q qs qq qs qd ds q q
ds dq qs d ds dd ds d d
q qs d ds
q qs d ds
v R i L i L i L i L i
v L i R i L i L i L i
v L i L i R i L i L i
v L i L i L i R i
The equations are
L i
α α β β
α α β β
α α α α α αα α αβ β
β β β βα α β β ββ β
ρ ρ ρ ρ
ρ ρ ρ ρ
ρ ρ ρ ρ
ρ ρ ρ ρ
= + + + +
= + + + +
= + + + +
= + + + +
; rr dd qq sL L L L L Lαα ββ= = = =BSS
8

• Mutual inductances between the stator
windings and between the rotor windings are
zero as they are displaced by 900. Thus,
Lαβ = Lβα = 0 and Ldq = Lqd = 0
• Mutual inductances between the stator and
rotor windings are a function of the rotor
position θr. Thus, with Lsr as the peak value of
the mutual inductance between a stator and a
rotor winding, we have,
cos ; sin
sin ; cos
d d sr r d d sr r
q q sr r q q sr r
L L L L L L
L L L L L L
α α β β
α α β β
θ θ
θ θ
= = = =
= = = = −
BSS
9

• Solutions of the above equations are time-
consuming.
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
sin cos
co
•
s sin
sin cos
cos sin
:
qs s s qs sr r sr r
ds s s ds sr r sr r
sr qs r sr ds r rr rr
sr qs r sr ds r rr rr
The res
v
ulting equ
R L i L i L i
v R L i L i L i
v L i L i
ations are as follows
R L i
v L i L i R L i
α β
α β
α α
β β
ρ ρ θ ρ θ
ρ ρ θ ρ θ
ρ θ ρ θ ρ
ρ θ ρ θ ρ
= + + −
= + + +
= + + +
= − + + +
s q d rrwhere R R R and R R Rα β= = = =
BSS
10

Transformation to Constant Matrices
BSS
11
Transformation of
actual to fictitious
rotor variables

• Above transformation is valid for voltages,
currents and flux-linkages in a machine.
• Further, it is found that Tαβ = Tαβ-1 which is
required for inverse transformation.
• Tαβ is both orthogonal and symmetric.
BSS
12 cos sin . .,
sin cos
drr r r
dqrr
qrr r r
i ii e i T i
i i
α
αβ αββ
θ θ
θ θ
= = −
• Fictitious rotor currents iqrr and idrr are the sum
of the projections of iα and iβ on the q and d
axis, respectively as given below:

• Rotor equations need to be referred to the
stator so that the stator and rotor d & q axes
windings gets physically connected.
BSS
13
. .
. .
0 0
0 0
s s srqs qs
s s srds ds
qrr sr sr r rr rr rr r qrr
drr drrsr r sr rr r rr rr
R L Lv i
R L Lv i
v L L R L L i
v iL L L R L
ρ ρ
ρ ρ
ρ θ ρ θ
θ ρ θ ρ
+ + = − + − +
.
θ θr r
where is the time derivative of
• Applying the transformation to the α and β
rotor winding currents and voltages, we get,

2 2
1 1
2 2
;
•
; ;
;
/
/
:
r rr r rr qr qrr dr drr
qrr drrqr dr
w
w
R a R L a L v av v av
i ii i where
a a
k Tstator effective turns phasea
rotor effective turns ph
Steps involved
ase
a
k
r
T
e
= = = =
= =
= =
2
1 1 2; ;
• ,
: m sr m sr
Also Magnetizing and Mutual inductances
L T L TT ar L La e ∝ ∝ ∴ =
BSS
14

• Note that the impedance matrix has constant
inductance terms and is no longer dependent
on the rotor position.
BSS
15
. .
. .
0 0
0 0
s s mqs qs
s s mds ds
qr m m r r r r r qr
dr drm r m r r r r
system equation of induction m
R L Lv i
R L Lv i
v L L R L
ot
L i
v iL L L
o
R
r
L
ρ ρ
ρ ρ
ρ θ ρ θ
θ ρ θ ρ
+ + = − + − +
→
• Thus, the machine equations referred to the
stator are obtained as:

3-phase to 2-phase Transformation
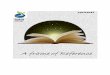
• A dynamic model for the 3-phase inductionmachine can be derived from the two-phasemachine if the equivalence between three andtwo phases is established.
• Equivalence is based on the equality of the mmfproduced in the two-phase and three-phasewindings and equal current magnitude.
• Assuming that each of the 3-phase windingshas T1 turns/phase and equal currentmagnitudes, the 2-phase windings will have3T1/2 turns/phase for mmf equality.
BSS
16

BSS
17
Two- and Three-phase stator windings

• Current i0 represents the imbalances in the a, b
and c phase currents and can recognized as the
zero-sequence component of the current.
0
• 0
2 2cos cos cos
3 3
2 2 2
sin sin sin3 3 3
1 1 1
2 2 2
:
c c c
qs as
ds c c c bs
cs
Relationship between dq an
i
d abc currents are
i
i i
i i
π πθ θ θ
π πθ θ θ
− +
= − +
[ ]0 , qd abc abc
i TT s ihu =
BSS
18

• Transformation from two-phase currents tothree-phase currents can be obtained as
[ ]
[ ]
1
0
1
cos sin 1
2 2 cos sin 1
3 3
2 2cos sin
13 3
c c
abc c
abc abc q
c
c c
d
wher
i i
e
T
T
θ θ
π πθ θ
π πθ θ
−
−
= − −
+ +
=
BSS
19

• This transformation can also be thought of as a
transformation from three (abc) axes to three
new (qd0) axes.
• Unbalances in the abc variables requires three
variables such as dq0.
• Balanced abc variables (equal phase
displacement and magnitude) requires two
independent dq variables and the third is a
dependent variable obtained as the negative
sum of two independent variables.BSS
20

• Note that only leakage inductances and phase
resistances influence the zero-sequence
voltages and currents while the dq component
variables are influenced by the self and mutual
inductances and phase resistances.
BSS
21
• Four system equations given by vqs, vds, vqr and
vdr for balanced conditions.
( ) ( )0 0 0 0 and ρ ρ= + = +s s ls s r r lr r
v R L i v R L i
• For unbalanced conditions, two more system
equations, one each for stator & rotor zero-
sequence voltages emerges. They are given by

Stanley’s Model
• Also known as stator-reference-frames model.
• Here, θc = 0 and hence, transformation matrix is
1 11
2 2
2 3 30 0
3 2 2
1 1 1
2 2 2
− −
= −
S
abcT for abc to qd
BSS
22

An exampleAn induction motor has the following parameters:
5hp, 200V, 3-phase, 60Hz, 4-pole, star connected;
Rs = 0.277Ω; Rr = 0.183Ω; Lm = 0.0538H
Ls = 0.0553H; Lr = 0.056H
Effective stator to rotor turns ratio a = 3.
The motor is supplied with its rated and balanced
voltages. Find the q and d axes steady state
voltages, currents and phase currents Iqrr, Idrr, Iα &
Iβ when the rotor is locked. Use stator-reference-
frames model.
BSS
23

• The applied phase voltages are as follows:
BSS
24
2002 sin 163.3sin
3
2 2163.3sin & 163.3sin
3 3
as s s
bs s cs s
v t t
v t v t
ω ω
π πω ω
= × =
= − = +
0
• :
qs as
S
ds abc bs
cs
The d and q axes voltage
v v
v T vs ar
v v
e
=
( )2 1
, 3 2
qs as bs csHence v v v v
= − +

• For a balanced 3-phase input, vas + vbs + vcs = 0
• Substituting for vbs and vcs in terms of vas yields
BSS
252 3
3 2qs as asv v v
= =
( ) 0
1 0
3• , ds cs bsSimilar v v v al ndy v= − =
( )
0
0
, 163.3sin 163.3 0 163.3
1 163.3cos
3
163.3 90 163.3
qs as s
ds cs bs s
Thus v v t V
and v v v t
j V
ω
ω
= = = =
= − =
= =

• The rotor is locked and hence
• For steady state evaluation,
ρ = jωs = j2πfs = j2π ×60 = j377 rad/sec
• The system equations in steady state are
• Note that the rotor windings are short-circuited
and hence rotor voltages are zero.
BSS
26
.
0rθ =
0 0
0 0
0 00
0 00
ρ ρ
ρ ρ
ρ ρ
ρ ρ
+ + = +
+
s s m qsqs
s s m dsds
m r r qr
m r r dr
R L L iv
R L L iv
L R L i
L R L i

• Numerical values for the parameters and variablesare substituted to solve for currents.
• Note that the stator and rotor currents aredisplaced by 900 among themselves as expected ina 2-phase machine.
• The zero-sequence currents are zero because zerosequence voltages are nonexistent with balancedsupply voltages.
BSS
27
0
qs
0
ds
0
qr
0
dr
i =35.37-j108.18=113.81 -71.9
i =108.18+j35.37=113.8118.1
i =-34.88+j103.63=109.34108.6
i =-103.63-j34.88=109.34 -161
.
:
4
The currents are

BSS
28
0
0
0
0
1 0 1 113.8 71.9
1/ 2 3 / 2 1 113.8168.1
113.8 48.11/ 2 3 / 2 1
• :
as qs
bs ds
cs
i i
i i
i
The phase currents are
i
− = − − = −
0
0
i 328.02108.6
i 328.0
•
2 161 4
:
.
qrr qr
drr dr
Rotor currents are ai
ai
= =
= = −
• The α and β currents, assuming θr = 0 are
0
0
cos sin 328.02 161.4
sin cos 328.02108.6
drrr r
qrrr r
ii
ii
α
β
θ θ
θ θ
− = = − −

2) Derive the steady-state equivalent circuit from
the dynamic equations of the induction motor.
• This can be derived by substituting for the
d- and q-axes voltages in system equations.
BSS
29
2 2sin ; sin & sin
3 3as m s bs m s cs m sv V t v V t v V t
π πω ω ω
= = − = +
0
0
0
sin 0
cos 90
0 0
,
qs as m s m
S
ds abc bs m s m
cs
v v V t V
v T v V t V
v v
Thus
ω
ω
= = =
In steady State, =j 0s qr drand v vρ ω = =

• Substituting these into system equations yields,
• The input voltages are in quadrature so the
currents have to be in quadrature because the
system in steady state is linear and they can be
represented as ids = jiqs and idr = jiqr
• Substituting these equations into the above
equation and considering only one stator and
rotor equation with rms values yields,
BSS
30
0 0
0 0
0
0
ω ω
ω ω
ω ω ω ω
ω ω ω ω
+ + = − + −
+
s s s s m qsm
s s s s m dsm
s m r m r s r r r qr
r m s m r r r s r dr
R j L j L iV
R j L j L ijV
j L L R j L L i
L j L L R j L i

• Rearrange the rotor equation with the aid of
ωsl = ωs– ωr = Sωs. Thus, rotor equation is
• Rotor and stator equations, when combined
give the equivalent circuit with the magnetizing
current as the sum of stator and rotor currents.
BSS
31
( )
( ) ( )( )0
s s s s s s m r
m s r s r s r r r
V R j L I j L I
jL I R j L I
ω ω
ω ω ω ω
= + +
= − + + −
0 rm s s s r r
RjL I j L I
Sω ω
= + +
, s m ls r m lrA L L L and L Ll o Ls = + = +

Power Equivalence
• 3
t
i abc abc as as bs bs cs cs
phase instantaneous p
P v i v i v i
ower inp i
i
ut s
v= +
−
= +
[ ]( ) [ ]
[ ]( ) [ ]
( )( ) ( )
1 1
0 0
1 1
0 0
0 0
3
• , ,
2 12
− −
− −
−
=
=
= + + →
t
i abc qd abc qd
tt
qd abc abc qd
qs qs ds ds
P T v T i
v T T
On tran
i
v i v
sforming to q a
i v
nd
i
d axes we get
BSS
32

• Zero-sequence current does not exist for a
balanced three-phase machine.
• The model development has so far kept the
d- and q-axes stationary with respect to the
stator. These axes or frames are known as
reference frames.
• The speed of the reference frames is arbitrary
in an arbitrary reference frame.
• The input power given by equation (1) remains
valid for all occasions.
( )3,
2= +
i qs qs ds dsThus P v i v i
BSS
33

Assignment1) Discuss the suitability of stationary reference
frames for the induction motor in power
system studies.
2) Explain the method of obtaining the constant
matrices for transformation on to the fictitious
q and d axes for a 2-phase induction motor.
3) Explain the need for 3-phase to 2-phase
transformation and the method of carrying out
such transformation with an example.
4) Derive the power equivalence in dq0 variables.
BSS
34