Embed Size (px)
Citation preview

University of Calgary
PRISM: University of Calgary's Digital Repository
Graduate Studies The Vault: Electronic Theses and Dissertations
2014-09-29
Reconfigurable RF Devices Using Pneumatic Control
of Solid Dielectric Slugs
Wu, Billy
Wu, B. (2014). Reconfigurable RF Devices Using Pneumatic Control of Solid Dielectric Slugs
(Unpublished doctoral thesis). University of Calgary, Calgary, AB. doi:10.11575/PRISM/27560
http://hdl.handle.net/11023/1840
doctoral thesis
University of Calgary graduate students retain copyright ownership and moral rights for their
thesis. You may use this material in any way that is permitted by the Copyright Act or through
licensing that has been assigned to the document. For uses that are not allowable under
copyright legislation or licensing, you are required to seek permission.
Downloaded from PRISM: https://prism.ucalgary.ca

UNIVERSITY OF CALGARY
Reconfigurable RF Devices Using Pneumatic Control of Solid Dielectric Slugs
by
Billy Wu
A THESIS
SUBMITTED TO THE FACULTY OF GRADUATE STUDIES
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE
DEGREE OF DOCTOR OF PHILOSOPHY
GRADUATE PROGRAM IN ELECTRICAL AND COMPUTER ENGINEERING
CALGARY, ALBERTA
September, 2014
c© Billy Wu 2014

Abstract
Many antennas reported with switchable polarization were designed using PIN diodes
because of their reliability and commercial availability. However, in realizing more
elaborate antennas, the biasing structures for these DC-controlled switching compo-
nents become more complex, which leads to design limitations, losses, and undesired
radiation. Other reconfigurable technologies, such as MEMS and liquid crystals, could
be chosen for a particular application depending on various trade-offs, for example
efficiency and ease of implementation. A recently developed scheme of using pneumat-
ically controlled solid dielectric slugs offers an alternative to the existing technologies.
These copper-backed slugs are confined within a dielectric channel adjacent to the
conducting layer. A slug is either directly above or situated away from a slit in the
conducting layer to realize its two switching states. Its translational movement is in-
duced by a pneumatic pressure gradient inside the channel. The technology is low-loss
and immune to RF distortion, and eliminates the need of DC biasing structures.
This technique was incorporated in the design of a reconfigurable ring slot an-
tenna capable of three polarization states (LP/LHCP/RHCP) at the 2.4-GHz ISM
band. The multilayered structure consisted of low-loss dielectric laminate layers that
were laser-machined to produce the precise profile and smooth edges required for
repeatable movement of the slugs. The measured axial ratio (AR) bandwidth is
5%, which compares favourably to similar antennas. Parametric analyses were per-
formed to accomplish the challenging task of realizing a design in which, the AR and
impedance bandwidths of all three states shared a common frequency band centered
ii

around 2.4 GHz. An overall three-state bandwidth of 2.4% was achieved, which is
the highest amongst similar antennas operating in the same frequency range. The
measured antenna performance — radiation patterns, gain values, AR, and |S11| —
in all three polarization states was consistent with the simulated performance. The
pneumatic actuation of four slugs inside a channel to realize the three different states
was successfully implemented, demonstrating that pneumatic slug control technology
is suitable for inclusion in reconfigurable antennas.
iii

Acknowledgements
The journey to this point of my academic life has been a wild yet very enjoyable
ride, and it was only possible because of the help, support, and mentoring from
many people. First and foremost, I would like to thank my supervisor Dr. Michal
Okoniewski. It has been a pleasure to work with Michal for all these years. His
wisdom, advice, and positive attitude have in no small way influenced my work ethic,
perception, and approach towards research and many other aspects of academia. He
has provided me with the best environment to learn, to perform research, and to grow
as a person. His tremendous support for me to pursue endeavors beyond research
— volunteering overseas, teaching, being involved in students’ associations, living a
second life in the mountains, to name a few — is rare to find in any supervisor.
I would also like to thank Dr. Chris Hayden for his help and unlimited support
in fabrication in this project. His experience and knowledge has proven invaluable,
and his accommodation and patience for my many requests and questions has been
greatly appreciated. His attention to detail and the high standard he upkeeps as
AMIF’s Operations Manager cannot go unmentioned in the success of this project.
His commitment to reading this thesis from cover to cover deserves special recognition.
I am also indebted to Dr. Mike Potter for his knowledge and support during my
pursuit of MSc and PhD degrees. His words of wisdom and timely encouragement
have helped me through a number of roadblocks I have encountered. His pragmatic
approach as a researcher and an educator has influenced my own approach in many
ways. Dr. Elise Fear and Dr. Bill Rosehart have offered assistance and advice on
iv

countless occasions. Working with them on research and on teaching has been an
enriching experience. Ideas for troubleshooting in the cleanroom are never in short
supply with AMIF’s Facility Manager Dr. Colin Dalton. This project would not have
started without his devotion to establishing AMIF over the years. His dedication
to a number of campus associations has been an inspiration. I am also indebted to
electrical engineering technicians Chris Simon and John Shelley for their technical
support. Chris’s positive outlook and enthusiasm towards education and mentoring
has resonated with me during many thought-provoking conversations.
Gratitude is owed to past AEG graduates: Adrian, Rudi, Greg, Imed, Yen, Kelly,
and Sean, who have been great mentors and role models for me. Many colleagues have
become great friends: Jeremie, Thomas, Andrew, Andy, Trevor, Robbie, Charlotte,
Andrea, John, Marcel N., Qiao, and Lincoln.
All my teachers in the past have played a role in shaping who I am today. Special
thanks go to Mr. Norm Sigalet and Mr. Dave Karbashewski for being two of the most
inspiring teachers I have ever had. I would not have entered electrical engineering
without their superb teaching in electro-technologies and physics during my high
school days.
This doctoral degree could not have been completed without the generous support
in funding from the Natural Sciences and Engineering Research Council of Canada
(NSERC), the Alberta Innovates - Technology Futures (AITF), and the Canadian
Microelectronics Corporation (CMC).
Last but not least, I would like to thank Marcel Seguin, who deserves a special
mention, for not cutting the rope when he had so many opportunities to do so.
v

To my family.
Your support means everything.
God bless you.
vi

Table of Contents
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
List of Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvi
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1 Project Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.1 Circularly Polarized Antennas . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Circular Polarization . . . . . . . . . . . . . . . . . . . . . . . 52.1.2 Figures of Merit . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1.3 Printed Antennas with Switchable Polarization . . . . . . . . 10
2.2 Means of Reconfiguration . . . . . . . . . . . . . . . . . . . . . . . . 142.2.1 DC-Biased Switches . . . . . . . . . . . . . . . . . . . . . . . 152.2.2 Liquid Metals . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3 Permittivity Manipulation Techniques . . . . . . . . . . . . . 172.2.4 Flexible Materials . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Selecting a Circularly Polarized Antenna . . . . . . . . . . . . . . . . 232.4 Realizing Circular Polarization with Ring Slot Antenna . . . . . . . . 25
3 Pneumatically Controlled Switching Mechanism . . . . . . . . . . . 333.1 Concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2 Process and Material Selection for Channel Fabrication . . . . . . . . 363.3 Processing SU8 Photoresist . . . . . . . . . . . . . . . . . . . . . . . 383.4 Channel Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4.1 Simple Channels . . . . . . . . . . . . . . . . . . . . . . . . . 443.4.2 More Complex Configurations . . . . . . . . . . . . . . . . . . 46
4 Design and Fabrication of a Capacitive Switch . . . . . . . . . . . . 52
vii

4.1 Structure and Fabrication Process . . . . . . . . . . . . . . . . . . . . 534.2 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.3 Fabrication and RF Measurement . . . . . . . . . . . . . . . . . . . . 584.4 Pressure Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . 674.5 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5 Ring Slot Antenna with Switchable Polarization . . . . . . . . . . . 715.1 Changing Polarization Using Pneumatic Control . . . . . . . . . . . . 72
5.1.1 Linear Polarization . . . . . . . . . . . . . . . . . . . . . . . . 725.1.2 Right-Hand and Left-Hand Circular Polarizations . . . . . . . 73
5.2 Design using glass wafers and photoresist . . . . . . . . . . . . . . . . 765.2.1 Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775.2.2 Parametric Analysis . . . . . . . . . . . . . . . . . . . . . . . 815.2.3 Simulated Performance . . . . . . . . . . . . . . . . . . . . . . 905.2.4 Sensitivity to Fabrication Tolerances . . . . . . . . . . . . . . 1035.2.5 Modeling for Measurement of Fabricated Antenna . . . . . . . 109
5.3 Design Using Laminate Boards . . . . . . . . . . . . . . . . . . . . . 1125.3.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.3.2 Simulated Performance . . . . . . . . . . . . . . . . . . . . . . 117
5.4 Design Advantages and Disadvantages . . . . . . . . . . . . . . . . . 127
6 Fabrication and Measurement of Ring Slot Antenna . . . . . . . . 1296.1 Fabrication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
6.1.1 Glass Wafers as Substrate . . . . . . . . . . . . . . . . . . . . 1306.1.2 Laminate Boards as Substrate . . . . . . . . . . . . . . . . . . 1336.1.3 Pneumatic Control and Pressure Measurement . . . . . . . . . 136
6.2 Antenna Measurements . . . . . . . . . . . . . . . . . . . . . . . . . . 1396.2.1 Antenna Patterns . . . . . . . . . . . . . . . . . . . . . . . . . 1426.2.2 Return Loss (−|S11|) . . . . . . . . . . . . . . . . . . . . . . . 1456.2.3 Axial Ratio (AR) . . . . . . . . . . . . . . . . . . . . . . . . . 1476.2.4 Gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1486.2.5 Performance Summary . . . . . . . . . . . . . . . . . . . . . . 150
7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1537.1 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1557.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
7.2.1 Further Characterization of Switching Mechanism . . . . . . . 1567.2.2 Slug Position Control . . . . . . . . . . . . . . . . . . . . . . . 1567.2.3 A Complete System . . . . . . . . . . . . . . . . . . . . . . . . 1577.2.4 Miniaturization . . . . . . . . . . . . . . . . . . . . . . . . . . 158
viii

7.2.5 Other Antenna Designs . . . . . . . . . . . . . . . . . . . . . . 160
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
A Antenna Measurements in Anechoic Chamber . . . . . . . . . . . . 171A.1 Linear Polarization Measurements . . . . . . . . . . . . . . . . . . . . 172A.2 Circular Polarization Measurements . . . . . . . . . . . . . . . . . . . 174
A.2.1 Derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175A.2.2 Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
B Miniature Pumps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
C Photolithography Process of SU8-2100 . . . . . . . . . . . . . . . . 183C.1 Initial Preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183C.2 Substrate Pretreat . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185C.3 Coat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186C.4 Soft Bake . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187C.5 Expose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187C.6 Post Exposure Bake (PEB) . . . . . . . . . . . . . . . . . . . . . . . 188C.7 Develop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
D Antenna Radiation Efficiency Measurements . . . . . . . . . . . . . 189
ix

List of Tables
2.1 Merits and drawbacks of various types of circularly polarized antennas. 242.2 Performance of notable antennas in literature with switchable polar-
ization in the 2.4 GHz range. . . . . . . . . . . . . . . . . . . . . . . . 32
4.1 Summary of de-embedded measured results. . . . . . . . . . . . . . . 69
5.1 Layer thickness of the ring slot antenna with glass substrate. . . . . . 775.2 Dimensions of the ring slot antenna with glass substrate. . . . . . . . 815.3 Simulated performance of the ring slot antenna using glass substrate. 995.4 Layer thickness of the ring slot antenna with laminate substrate. . . . 1165.5 Dimensions of the ring slot antenna with laminate substrate. . . . . . 1175.6 Simulated performance (realistic model) of the ring slot antenna using
laminate substrate. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
6.1 Measured and simulated performance of the ring slot antenna. . . . . 1506.2 Comparison of antenna performance with similar reconfigurable anten-
nas in literature. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
B.1 Specifications of some commercially available miniature pumps. . . . 182
x

List of Figures
1.1 Thesis overview. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Illustration of circular polarization. . . . . . . . . . . . . . . . . . . . 72.2 Examples of printed antennas. . . . . . . . . . . . . . . . . . . . . . . 122.3 Various designs of printed antennas with switchable polarization. . . . 142.4 Examples of using liquid metals in RF devices. . . . . . . . . . . . . . 172.5 Reconfigurable reflectarray design using COSMIX. . . . . . . . . . . . 202.6 Switch design based on pneumatically actuated membranes. . . . . . 212.7 Flexible patch antenna. . . . . . . . . . . . . . . . . . . . . . . . . . . 222.8 Ring slot antenna with switchable polarization using PIN diodes. . . 262.9 Field distribution on the ring slot antenna. . . . . . . . . . . . . . . . 272.10 Comparison of perturbation on the ring slot current for different posi-
tion of the rectangular opening. . . . . . . . . . . . . . . . . . . . . . 282.11 Illustration of phase lag in the radiated field due to the lowering of
resonant frequency of an antenna. . . . . . . . . . . . . . . . . . . . . 292.12 Ring slot antenna operating in LHCP and RHCP states. . . . . . . . 30
3.1 Pneumatic control of the slug position and the resulting capacitancevariation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Computer screen-shot of the photomask design used to build the testchannels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3 Adhesion issue in the development of the SU8 process. . . . . . . . . 423.4 SU8 resist successfully deposited and developed. . . . . . . . . . . . . 433.5 Testing of the switching mechanism with simple channels. . . . . . . . 453.6 A meandering channel. . . . . . . . . . . . . . . . . . . . . . . . . . . 473.7 A device with multiple chambers in each channel path. . . . . . . . . 483.8 Prototype demonstrating the concept of channel blocking. . . . . . . 493.9 Concept of a nine-state device and its fabricated channels. . . . . . . 50
4.1 Exploded view of the switch showing various layers involved. . . . . . 544.2 Side profile illustrating two states of the switch. . . . . . . . . . . . . 554.3 Custom fabrication process. . . . . . . . . . . . . . . . . . . . . . . . 564.4 Simulated insertion loss of the closed switches. . . . . . . . . . . . . . 574.5 Simulated return loss of the closed switches and isolation of the open
switches. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.6 Cracked glass cover from mechanical drilling. . . . . . . . . . . . . . . 59
xi

4.7 Copper adhesion issue on the patterned glass wafer. . . . . . . . . . . 60
4.8 Fabricated switch in closed and open positions. . . . . . . . . . . . . 61
4.9 Experimental measurement setup of the switch. . . . . . . . . . . . . 62
4.10 Repeatability of the switch. . . . . . . . . . . . . . . . . . . . . . . . 62
4.11 Concept of TRL calibration. . . . . . . . . . . . . . . . . . . . . . . . 63
4.12 Custom TRL calibration standards. . . . . . . . . . . . . . . . . . . . 64
4.13 Measured performance of the open switch. . . . . . . . . . . . . . . . 65
4.14 Measured performance of the closed switch. . . . . . . . . . . . . . . 66
4.15 Copper-coated glass slugs. . . . . . . . . . . . . . . . . . . . . . . . . 66
4.16 Setup of pressure measurement. . . . . . . . . . . . . . . . . . . . . . 68
5.1 Structure of the switchable polarization ring slot antenna. . . . . . . 73
5.2 Direction of air flow and the resulting positions of slugs for generatinglinear polarization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.3 Direction of air flow and the resulting positions of slugs for generatingRHCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.4 Direction of air flow and the resulting positions of slugs for generatingLHCP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.5 Dimensions of the ring slot with glass substrate. . . . . . . . . . . . . 78
5.6 Dimensions of microstrip-to-slotline transition with glass substrate. . 79
5.7 Simulation model of the reconfigurable ring slot antenna with glasssubstrate in HFSS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.8 Minimum AR achieved for various slug widths, slug lengths, and airgap separations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.9 Frequency of minimum AR for various slug widths, slug lengths, andair gap separations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.10 AR bandwidth obtained for various slug widths, slug lengths, and airgap separations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.11 Minimum AR achieved for various ring outer radii, slug widths, andair gap separations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.12 Frequency of minimum AR for various ring outer radii, slug widths,and air gap separations. . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.13 AR bandwidth obtained for various ring outer radii, slug widths, andair gap separations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.14 |S11| of the simulated ring slot antenna (glass substrate) under differentpolarization states. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.15 S11 (on the Smith Chart) of the simulated ring slot antenna (glasssubstrate) from 2 to 2.8 GHz under different polarization states. . . . 91
5.16 Broadside AR of the simulated ring slot antenna (glass substrate). . . 92
xii

5.17 AR of the simulated ring slot antenna (glass substrate) in the twoprincipal planes at 2.38 GHz. . . . . . . . . . . . . . . . . . . . . . . 93
5.18 Broadside gain of the simulated ring slot antenna (glass substrate). . 94
5.19 Simulated antenna pattern for φ = 0 and φ = 90 planes when oper-ating in the RHCP state at 2.38 GHz (glass substrate). . . . . . . . . 95
5.20 Simulated antenna pattern for φ = 0 and φ = 90 planes when oper-ating in the LHCP state at 2.38 GHz (glass substrate). . . . . . . . . 96
5.21 Simulated antenna pattern for φ = 0 and φ = 90 planes when oper-ating in the LP state at 2.38 GHz (glass substrate). . . . . . . . . . . 98
5.22 Ground current at different phases of a cycle in the LP state (glasssubstrate). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.23 Ground current at different phases of a cycle in the RHCP state (glasssubstrate). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.24 Ground current at different phases of a cycle in the LHCP state (glasssubstrate). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.25 Parameters considered in the sensitivity analysis. . . . . . . . . . . . 104
5.26 Performance variation due to changing hair (glass substrate). . . . . . 105
5.27 Simulated antenna pattern for different air gap separations hair (glasssubstrate). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.28 Performance variation due to misalignment between the ground waferand the channel/slugs (glass substrate). . . . . . . . . . . . . . . . . . 107
5.29 Performance variation due to misalignment between the ground waferand the microstrip wafer (glass substrate). . . . . . . . . . . . . . . . 108
5.30 Simulation setup for antenna measurement (glass substrate). . . . . . 110
5.31 Comparison of various additional features in the simulation model onthe AR performance (glass substrate). . . . . . . . . . . . . . . . . . 111
5.32 Comparison of various additional features in the simulation model onthe |S11| performance (glass substrate). . . . . . . . . . . . . . . . . . 112
5.33 Various layers composing the ring slot antenna, with laminate substrate.114
5.34 Magnified plan view of the ring slot antenna with laminate substrateand channel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.35 Simulation setup for antenna measurement (laminate substrate). . . . 118
5.36 |S11| of the simulated antenna (laminate substrate). . . . . . . . . . . 119
5.37 Broadside AR of the simulated antenna (laminate substrate). . . . . . 120
5.38 Broadside gain of the simulated antenna (laminate substrate). . . . . 121
5.39 Comparison of various additional features in the simulation model ongain performance (laminate substrate) for the RHCP state. . . . . . . 122
5.40 Simulated antenna pattern for φ = 0 and φ = 90 planes when oper-ating in the RHCP state at 2.4 GHz (laminate substrate). . . . . . . 123
xiii

5.41 Ground current at different phases of a cycle in the RHCP state (lam-inate substrate). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
5.42 Comparison of impedance and AR bandwidths (laminate substrate,realistic model). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6.1 Fabricated channel layer on glass wafer. . . . . . . . . . . . . . . . . . 1306.2 Delamination of copper after etching. . . . . . . . . . . . . . . . . . . 1326.3 Fabricated antenna with laminate substrate (ground plane side). . . . 1336.4 Fabricated antenna with laminate substrate (microstrip side). . . . . 1346.5 View under the microscope of a slug resting in the channel. . . . . . . 1356.6 Positions of slugs for different polarization states. . . . . . . . . . . . 1356.7 Setup for the pneumatic control test of the antenna and the actuation
sequence of air inflow for each polarization state. . . . . . . . . . . . . 1376.8 Two-step sequence of air input and the slug movement for realizing
each polarization state. . . . . . . . . . . . . . . . . . . . . . . . . . . 1386.9 Conceptual diagram of the antenna measurement setup inside the ane-
choic chamber. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1406.10 Standard gain horn and the ring slot antenna (AUT). . . . . . . . . . 1406.11 Setup of the ring slot antenna on the turntable for scanning φ = 0
(left) and φ = 90 (right) planes. . . . . . . . . . . . . . . . . . . . . 1416.12 Comparison between measured and simulated antenna patterns when
operating in the LP state at 2.4 GHz. . . . . . . . . . . . . . . . . . . 1426.13 Comparison between measured and simulated antenna patterns when
operating in the RHCP state at 2.4 GHz. . . . . . . . . . . . . . . . . 1436.14 Comparison between measured and simulated antenna patterns when
operating in the LHCP state at 2.4 GHz. . . . . . . . . . . . . . . . . 1446.15 Comparison between measured and simulated |S11| of the ring slot
antenna under different polarization states. . . . . . . . . . . . . . . . 1466.16 Comparison between measured |S11| with and without pneumatic ac-
tuation setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1476.17 Comparison between measured and simulated broadside AR of the ring
slot antenna under different polarization states. . . . . . . . . . . . . 1486.18 Comparison between measured and simulated broadside gain of the
ring slot antenna under different polarization states. . . . . . . . . . . 1496.19 Comparison of measured impedance and AR bandwidths. . . . . . . . 151
7.1 Introducing pressure gradient in the orthogonal direction. . . . . . . . 1577.2 Exploded view of the frequency-switchable aperture-coupled antenna
with a pneumatically controlled swinging arm. . . . . . . . . . . . . . 1617.3 Operation of the frequency-switchable antenna. . . . . . . . . . . . . 162
xiv

A.1 Generalization of two orthogonal linear components. . . . . . . . . . . 176A.2 Linearly polarized antenna measurements required for obtaining CP
patterns of the AUT in φ = 0 and φ = 90 planes. . . . . . . . . . . 180
C.1 SU8-2100 process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
D.1 Wheeler Caps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190D.2 S11 of the AUT inside the small Wheeler Cap, shown on the Smith Chart.194D.3 |S11| of the AUT inside the Wheeler Caps. . . . . . . . . . . . . . . . 195D.4 Determining the reflection circle from the measured S11 on the Smith
Chart, with the AUT inside the small Wheeler Cap. . . . . . . . . . . 196D.5 Determining the reflection circle from the measured S11 on the Smith
Chart, with the AUT inside the large Wheeler Cap. . . . . . . . . . . 197
xv

List of Abbreviations
Abbreviations
AMIF Advanced Micro/nanosystems integration FacilityAR axial ratioAUT antenna under testBST barium strontium titanateBW bandwidthCMOS complementary metal-oxide-semiconductorCOSMIX coaxial stub microfluidic impedance transformerCP circular polarization / circularly polarizeddB decibelsDUT device under testFET field-effect transistorGNSS global navigation satellite systemGPS global positioning systemHMDS hexamethyldisilazaneISM industrial, scientific, and medical equipmentLHCP left-hand circular polarization / left-hand circularly polarizedLP linear polarization / linearly polarizedMEMS micro-electromechanical systemsPCB printed circuit boardPDMS polydimethylsiloxaneRF radio frequencyRHCP right-hand circular polarization / right-hand circularly polarizedSOI silicon-on-insulatorTRL Thru-Reflect-LineUV ultravioletVNA vector network analyzer
xvi

1
Chapter 1
Introduction
As technologies such as the global positioning system (GPS) — an example of a global
navigation satellite system (GNSS) — permeate modern society, circularly polarized
antennas, which are a major building block in GPS, continue to garner attention from
antenna researchers and designers. Most antennas are either linearly polarized or
circularly polarized by design. Antenna polarization, which is one of the fundamental
properties of any antenna, is generally fixed. The ability to dynamically change
the antenna polarization between linear and circular represents an active category of
research in reconfigurable antenna designs. An antenna possessing such an ability is a
reconfigurable antenna with switchable polarization. Multi-functionality and space-
saving are two of the main driving forces behind the interest in reconfigurable antenna
designs. The idea of having one reconfigurable antenna that provides the functions of
multiple fixed antennas is attractive in a number of telecommunications applications,
such as polarization diversity systems and frequency reuse schemes [1]–[3].
Specific devices or structures need to be incorporated in an antenna to realize
reconfiguration. Some are simple two-terminal circuit components that can be sol-
dered onto the conducting layers of the antenna directly, such as PIN diodes1 and
micro-electromechanical-system (MEMS) switches; while others are embedded in the
1“PIN” represents the three semiconductor regions of the device: p-type, intrinsic, and n-type.

2
substrate layer of the antenna, as in the case of liquid crystals. Some are mature
technologies that are commercially available, while some are gaining popularity as
continual research demonstrates that their advantages outweigh their shortcomings
for a variety of applications. The choice for a particular end-use application is decided
based on the prioritization of various trade-offs: efficiency, size, ease of fabrication,
cost, design complexity, power handling, response time, and repeatability. By ex-
ploring alternative mechanisms, such as the technology introduced in this thesis, an
antenna designer has more options when designing a reconfigurable antenna.
1.1 Project Goals
Developing a novel scheme of reconfiguration for practical RF devices such as an
antenna with switchable polarization is the focus of this project.
In accomplishing this objective, some specific goals are:
• Perform a literature review of existing schemes for reconfiguration with the aim
to evaluate the advantages and disadvantages of each technology;
• Select a topology for the antenna with switchable polarization that is suitable
for implementing the novel scheme;
• Develop a fabrication process that can reliably produce prototypes of RF devices
implementing the novel scheme;
• Build an RF switch, which is the most basic RF component, using the novel
scheme to confirm the viability of the scheme and to make modifications to the
fabrication process that are deemed necessary;
• Design and simulate the antenna to understand its behaviour and performance
prior to its fabrication;

3
• Fabricate the antenna and test the pneumatic actuation for realizing the three
different polarization states; and
• Measure the performance of the fabricated antenna and compare the results
with those obtained from simulations.
1.2 Thesis Outline
As mentioned in Section 1.1, the main objective in this thesis is the exploration of a
novel switching mechanism in the design of an antenna with switchable polarization.
The steps taken and the contributions made towards fulfilling this objective are orga-
nized and documented in following chapters. The relations between the topic of each
chapter are illustrated in Fig. 1.1.
• Chapter 2 provides the necessary background information and literature review
for evaluating the advantages and disadvantages of existing switching mecha-
nisms and selecting an appropriate circularly polarized antenna to implement
the novel mechanism developed in this project.
• Chapter 3 introduces the concept of using pneumatic control to manipulate
the positions of solid slugs, the fabrication procedure, and the results of some
fabricated prototypes to demonstrate the mechanical feasibility in switching.
• Chapter 4 documents the investigation of the RF behaviour of the switching
mechanism via the fabrication of an RF switch. The measured RF performance
is compared with the simulated results. The merits and drawbacks of the mech-
anism are discussed.
• Chapter 5 describes the design of a ring slot antenna implementing the mecha-
nism to achieve switchable polarization. The simulated results are analyzed for

4
Novel
Switching
Mechanism
Reconfigurable
Antenna
Selecting a
circularly
polarized
antenna
Chapter 2
Evaluating
pros & cons
of existing
mechanisms
Chapter 2 Developing
pneumatically-
controlled
mechanism
Chapter 3
Pneumatically-
controlled
capacitive
switch
Chapter 4
Designing
reconfigurable
ring slot
antenna
Chapter 5
Fabricating
reconfigurable
ring slot
antenna
Chapter 6
Literature Review
Thesis Contribution
Thesis Objective
Figure 1.1: Thesis overview.
two designs, each using a different fabrication procedure and set of materials.
The two methods of fabrication are compared in terms of practicality, cost, and
ease of manufacturing.
• Chapter 6 compares the measured results of the fabricated antenna against
the simulated results to illustrate the viability of the design procedure and the
chosen fabrication method. Mechanical testing of the switching mechanism in
the antenna is performed. Minor defects and deviations from the expected
behaviour and performance are addressed.
• Chapter 7 summarizes the technical and scholarly contributions of this project,
and offers some avenues for furthering this technology and related research ideas
that could be pursued in the future.

5
Chapter 2
Background
In this chapter, the motivation behind designing a reconfigurable circularly polarized
(CP) antenna with switchable sense of polarization is provided. A literature review
of some of the existing designs on CP antennas facilitates the selection of an antenna
type suitable for implementing the novel switching mechanism proposed in this thesis.
Attention is drawn to both the merits and drawbacks of existing means of reconfig-
uration to justify the exploration of the novel switching mechanism. The ring slot
antenna — the structure chosen for this project — is used as an example to explain
the theory behind the realization of circular polarization using perturbations.
2.1 Circularly Polarized Antennas
2.1.1 Circular Polarization
One of the characteristics associated with any antenna is the polarization of the
radiation it generates in the transmitting mode (or, the polarization of the radiation
it is most capable of receiving in the receiving mode). Elliptical polarization is the
most general case. The radiated field, over time, sketches an ellipse on the plane
perpendicular to the direction of field propagation. Linear polarization (LP) and
circular polarization (CP) are two special cases of elliptical polarization [4]. When
the length of the minor axis of the ellipse approaches zero, the ellipse becomes a line,

6
which is the case for LP. When the minor and major axes of the ellipse have the same
length, the ellipse becomes a circle, which is the case for CP.
Circular polarization, as the name suggests, is characterized by the ideally perfect
circle sketched out by the tip of the rotating field vector over time, when viewed
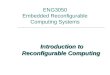
directly along the field propagation axis. CP is either left-handed (LHCP) or right-
handed (RHCP), as shown in Fig. 2.1, which shows a field vector rotating over time
as the field propagates in the +z-direction. A CP signal propagating towards an
observer while rotating in a clockwise fashion is an LHCP signal; and conversely
for counter-clockwise rotation and an RHCP signal. Eq. 2.1 shows how a CP field,
traveling in the +z-direction, can be decomposed into two orthogonal LP fields (Ex &
Ey) of equal magnitude and quadrature-phase (90 apart) [4]. Derivation and detailed
discussion can be found in Appendix A.2.1.
ERHCP =1√2(Ex + jEy) =
1√2(Ex + Eye
j(π/2))
ELHCP =1√2(Ex − jEy) =
1√2(Ex − Eye
j(π/2)) (2.1)
CP offers several advantages over its linear counterpart in some applications. For
instance, CP is preferred in satellite communications (such as GPS) because the signal
polarization purity is not affected by the Faraday rotation effect [4], [5, ch.54]. The
polarization of a LP wave, on the other hand, will rotate to a certain extent, often
unpredictably, during its propagation in the ionosphere, which can lead to polarization
inefficiency. LHCP and RHCP can also be utilized in polarization diversity schemes
to mitigate multipath fading [1],[6]. Modulation schemes using CP have also been

7
(b) RHCP
(a) LHCP
z
z
x
y
x
y
x
y
x
y
Field Vector
Figure 2.1: Illustration of circular polarization: (a) LHCP. (b) RHCP.
demonstrated [7]. A variety of antennas — specifically, printed antennas — for CP
applications are available, and the selection of an appropriate CP antenna for this
project will be discussed in Section 2.3.
2.1.2 Figures of Merit
This section introduces the figures of merit associated with circularly polarized an-
tennas, with which the antenna built in this project can be compared against existing
antennas published in literature.
2.1.2.1 Return Loss (−|S11|)
Generally, the majority of the incident power supplied from the power source to an
antenna is accepted by the antenna while a portion is reflected back to the power

8
source. Return loss, defined as −|S11| and expressed in the unit of decibels (dB)1, is
a metric for quantifying how well an antenna accepts power supplied to it (when it
is transmitting; the concept is the similar when the antenna is used as a receiving
antenna). It is essentially a ratio of the incident power to the reflected power. An
antenna that is well-matched to the source impedance — 50Ω is the standard in the
RF world — at a particular frequency will exhibit a return loss that is a large positive
dB value (while |S11| is a large negative dB value).
In standard antenna practice, a return loss greater than 10 dB (i.e. |S11| <
−10 dB) is considered acceptable for an antenna. The concept of impedance band-
width (BW) stems from this convention. The impedance bandwidth of an antenna is
the range of frequency within which |S11| < −10 dB or, in other words, within which
the antenna accepts at least 90% of the power supplied to it.
2.1.2.2 Axial Ratio (AR)
Axial ratio, which is a crucial parameter of a CP antenna, offers a quantitative de-
scription of how pure the CP radiation produced by the antenna is. It is the ratio of
the lengths of the major and minor axes of the ellipse [8], as expressed in Eq. A.12.
The lower the AR is, the purer the CP radiation is. The lowest achievable AR value is
1 (or 0 dB), which describes a perfect circle. The standard practice in designing a CP
antenna is to maintain AR < 3 dB in the desired frequency range of operation. This
gives rise to the metric of AR bandwidth. Typically, the AR bandwidth is smaller
than the impedance bandwidth because maintaining the condition of AR < 3 dB is
usually more challenging than upholding |S11| < −10 dB. Note that the impedance
1S11 represents the reflection coefficient at port 1 of a two-port network when port 2 is matched.

9
bandwidth generally does not encompass the AR bandwidth entirely by default. De-
sign parameters often need to be optimized in order for this condition to be satisfied.
2.1.2.3 Gain
When it is transmitting, a directional antenna has the property of having its radiated
energy more focused in certain direction(s), instead of being equally radiated in all
directions in free space. Conversely, when it is receiving, its ability to receive sig-
nal from certain direction(s) is greater, as opposed to being equally receptive in all
directions. The gain of an antenna describes how directive the antenna is.
Gain can be expressed as a numeric value or in the unit of dBi2. Gain of an
antenna in a particular direction is the ratio of the radiation intensity in that direction
to the average radiation intensity of the hypothetical isotropic antenna radiating the
same amount of energy. The greater the gain is in a direction, the more directive the
antenna is in that direction. Note that the gain of an antenna, by definition, accounts
for the radiation efficiency (how efficient the antenna is in minimizing dissipative
losses) but not the antenna mismatch [9].
Some antenna types are more directive than others, and generally each antenna
type has an expected range of gain it is capable to achieve. For instance, a typical
horn antenna may have a gain in the range of 15 to 20 dBi [10], while the directivity3
of a rectangular microstrip antenna with a thin substrate ranges from 5 to 8 dBi [5,
ch.7].
2The “i” stands for isotropic, which describes the hypothetical (idealized) antenna that canradiate its energy equally in all directions, such that its radiation intensity is constant over theentire sphere.
3Directivity is essentially gain but without accounting for the radiation efficiency. Therefore, thedirectivity value for an antenna is always higher than the gain value.

10
The gain of an antenna generally implies the gain in the co-polarization, which
is the polarization coinciding with the intended polarization of the antenna. Cross-
polarization, on the other hand, is the orthogonal polarization. For example, the
signal strength of the y-polarized radiation represents the level of cross-polarization
for an x-polarized LP antenna. As a second example, the RHCP signal is the cross-
polarized radiation for an LHCP antenna. It is in the interest of an antenna designer to
keep the cross-polarization level low in the intended direction(s) of signal propagation.
For a CP antenna, a low cross-polarization in a particular direction translates to a
low AR value, meaning that the antenna has good polarization purity in that specific
direction of propagation.
The main performance metrics that will be used to evaluate the antenna built
for this project have been described above. In the following section, the motivation
behind designing a reconfigurable antenna with switchable polarization, and a brief
history of the development of this type of antennas will be given.
2.1.3 Printed Antennas with Switchable Polarization
Reconfigurable CP antennas add a new dimension to the design of CP communica-
tions systems. Reconfiguration in the sense of polarization, the direction of maximum
radiation (boresight), or the frequency of operation can greatly increase the adapt-
ability of the antennas. With the latter two aspects of reconfiguration, electronically-
controlled target tracking and multiband operations become a possibility. The need
for switchable polarization arises from the existence of applications — such as polar-
ization diversity systems [6], the study of thickness sensitivity of anisotropic slab [11],
and magnetic field diagnostics in the corona [12] — in which the ability to transmit or

11
receive both LHCP and RHCP signals at the same location is required. In some sce-
narios, two antennas (one for each type of CP signal) need to function simultaneously,
where the concept of switchable polarization is not applicable. In other cases, how-
ever, only one type of CP signal needs to be transmitted or received at any particular
moment. A setup with a single reconfigurable antenna that can dynamically switch
between LHCP and RHCP is much more attractive than a system that requires two
fixed antennas and a dedicated switching network to perform the same function when
factors such as cost of production and maintenance, size, versatility, and efficiency
are considered. This is one of the sources of motivation to pursue reconfigurable
CP antennas with switchable polarization, besides the intention to implement a new
reconfigurable technology in a practical RF device, as outlined in Chapter 1.
As alluded to in Section 2.1.1, printed antennas are of interest because of:
• their relative ease of fabrication;
• their status of being a mature research topic, with a wealth of theoretical and
experimental knowledge available in literature; and
• the relative ease of integrating elements of reconfiguration, such as RF switches.
The simplest form of a printed antenna is a patterned metalized layer on one
surface of a dielectric substrate, with or without a second metalized layer on the other
surface. A printed antenna with only one metalized layer typically radiates on both
sides and has a symmetrical radiation pattern about the plane of the antenna. An
example is a slot antenna, depicted in Fig. 2.2(a). A printed antenna with metalized
layers on both sides (usually in the form of a patterned patch on top of a ground
plane) is called a microstrip antenna (Fig. 2.2(b)), and most of its radiated energy is
directed on one side (top hemisphere in the case of Fig. 2.2(b)). Due to their simple

12
structure and manufacturing process, which is very similar to that of printed circuit
boards (PCBs), printed antennas have been a popular choice for antenna designers
since 1970s [13].
Ground
Plane
(a) (b)Slot
Substrate
PatchBroadside Broadside
Broadside
Figure 2.2: Examples of printed antennas: (a) slot antenna, (b) microstrip antenna.
Printed antennas with simple geometric shapes such as rectangles, circles, and
annular rings are generally LP when they are single-fed (i.e. one point of excitation)
[14]. The boresight is generally in the broadside direction (see Fig. 2.2), meaning that
maximum radiation is along the normal direction to the plane of the antenna. The
most common method to achieve CP on a printed antenna is to simultaneously excite
two orthogonal linear modes which are of equal amplitude and phased 90 apart at the
operating frequency [13]. The theory behind the generation of CP will be discussed in
greater detail in Section 2.4 for the case of a ring slot antenna. Designing an antenna
with a single feed can be achieved either: by introducing perturbations strategically
on the metalized layer(s); by using a section of quarter-wavelength transmission line
or a hybrid power divider for quadrature-phase feed; or by other similar methods to
manipulate the currents on the metalized layer(s).
Designing a fixed (i.e. not reconfigurable) CP printed antenna can be considered

13
a mature research topic [13]. With the advances in RF switching elements such as
PIN diodes and MEMS switches, reconfigurable printed antennas with a switchable
sense of polarization have been successfully demonstrated as well; examples include:
• switching between the two ports to a semi-annular proximity feed line for a ring
antenna [15] (Fig. 2.3(a));
• switching the order of the quadrature-phase feed to a pair of crossed dipoles
[16];
• switching between shorting posts in the substrate of a square patch [17];
• switching between two pairs of triangular conductors on a corner-truncated
square patch [3] (Fig. 2.3(b));
• switching between rectangular openings attached to a ring slot [1] (Fig. 2.3(c));
• switching the orientation of an “L”-shaped arc slot near the edge of a circular
patch [18];
• switching the linear polarization of the aperture coupling for feeding a perturbed
circular patch [19]; and
• switching between a pair of crossed slots on a square patch [2] (Fig. 2.3(d)).
The list above describes how CP is generated for each reconfigurable antenna. It
also illustrates that the realization of reconfiguration lies in switching for majority of
the antennas with switchable polarization found in literature. However, other mech-
anisms besides switching have been reported, as demonstrated in [20] with changing
the excitation scheme of a substrate integrated composite right-/left-handed leaky-
wave structure. Also, antennas capable of both switchable polarization and frequency
agility (i.e. reconfigurable state of polarization and operating frequency) have been
published [21]. The focus of this thesis is on antennas with switchable polarization.

14
In the next section, various means of achieving reconfiguration will be introduced.
(a) (b)
(c) (d)
PIN diode
Shorting
capacitor
Biasing
slit
reconfigurablefeedline
foam substrate
FR-4 substrate
PIN diodeShorting
capacitor
Slot
Figure 2.3: Various designs of printed antennas with switchable polarization [1]c© 2003 IEEE, [2] c© 2002 IEEE, [3] c© 2004 IEEE, [15] c© 2008 IEEE.
2.2 Means of Reconfiguration
As mentioned in Section 2.1.3, CP antennas with a switchable sense of polarization
have seen a prevalent use of RF MEMS switches and PIN diodes as their switching

15
elements. Switching between the sense of CP can be performed simply by adjusting
the biasing voltages to these switching elements, essentially turning on and off the
various elements. This section compares these existing technologies, as well as some
of the more novel methods for creating reconfigurable RF devices.
2.2.1 DC-Biased Switches
The performance requirements of RF switches continue to become more stringent,
with many figures of merit being considered, such as insertion loss, isolation, power
handling, repeatability, switching speed, and ease of integration [22],[23]. Of the vari-
ety of existing switches in the market, PIN diodes, field-effect transistors (FETs), and
MEMS are amongst the most popular choices of RF designers [23],[24]. Though solid-
state switches — namely PIN diodes and FETs — boast fast switching speed in the
range of ns, which is important for telecommunications applications, they both suffer
from RF modulation, distortion, and noise. There is usually a trade-off between good
power handling capability and reasonable loss characteristics. For instance, Aeroflex
Metelics4 offers a range of PIN diodes, one with insertion loss of 0.25 dB at 6 GHz
and maximum power handling of only 10 W, which contrasts with another one capa-
ble of handling 150 W at the expense of higher insertion loss of 0.4 dB. RF MEMS
switches, on the other hand, have demonstrated their superior low-loss characteristics
(insertion loss < 0.1 dB up to 40 GHz) and immunity from RF distortion. However,
their switching speed is slower (µs) and they generally require higher actuation volt-
ages compared to solid-state switches. The power handling of MEMS devices is also
limited. It is obvious that the selection of the type of switches depends on the spe-
4www.aeroflex.com/ams/metelics/micro-metelics-prods-mhp-series-switches.cfm

16
cific applications and performance requirements. Note that varactor diodes, which
are voltage-controlled variable capacitors, may also be used as switching elements.
2.2.2 Liquid Metals
While research on MEMS switches is heading in the direction of smaller size and
greater efficiency [25], due in no small part to their usage in increasingly elaborate
circuit designs which require complex biasing networks, research on using unconven-
tional materials such as liquid metals has also received some attention. The use of
liquid metals such as mercury and Galinstan in tunable RF circuits as an alterna-
tive to traditional PIN diodes and MEMS switches has been demonstrated [26],[27],
as shown in Fig. 2.4. Varying the positions of the liquid metal droplets leads to a
change in the reactive loading of the RF circuitry, and can be utilized for reconfig-
urable antenna designs. A frequency reconfigurable antenna using a mercury droplet
has been demonstrated in [28]. By varying the voltage of electrostatic actuation, the
electrowetting profile of the droplet on the dielectric platform was altered, which gave
rise to a change in the capacitive loading and subsequently, a change in the resonant
frequency of the antenna. Such systems of dynamic control boast greater power han-
dling capability and better surface contact. However, the use of a toxic metal such
as mercury is not desirable, and relatively high voltages are often required to achieve
reasonable tuning. In addition, residue can be left behind unless the liquid metal
is bounded by Teflon coating or solution, and controlling the precise position of the
liquid metal in relation to the RF circuitry can be difficult unless binary control is
implemented. Also, using liquid metals introduces loss at high frequencies. Galin-
stan, for instance, has an electrical conductivity of 3.46 · 106 S/m, which is one order

17
of magnitude lower than that of copper [29].
(a) (b)
Figure 2.4: Examples of using liquid metals in RF devices [26] c© 2010 IEEE, [27]c© 2007 IEEE.
2.2.3 Permittivity Manipulation Techniques
As shown in Fig. 2.2, a microstrip antenna in its simplest form consists of a patch
(conductor), a substrate (dielectric), and a ground plane (conductor). RF switching
elements, as described in Section 2.2.1, manipulate the conducting layers. Another
way to create reconfiguration is to manipulate the dielectric substrate. Methods
utilizing materials such as ferroelectric thin films, liquid crystals, and nanoparticle-
oil mixture will be discussed next.
Phase shifters with ferroelectric thin films are based on varying the dielectric
constant of a thin film when it is subjected to a DC electric field. These thin-film
phase shifters were claimed to be capable of 360 of phase shift by sweeping the DC
bias voltage from 0 to 350 V to create a change in dielectric constant from 2000 to 800
[5, ch.21],[30]. However, this technology suffers from high dielectric loss and requires
high DC voltages. Maintaining the quality of the pulse laser ablated BaxSr1−xTiO3
films (one example of ferroelectric thin films) beyond a thickness of 0.5 µm is a difficult

18
challenge [5, ch.21]. The dielectric constant of the film is also subject to a significant
variation with changing temperature as opposed to bulk materials.
Similar to the ferroelectric thin-film technology, dynamic phasing with liquid crys-
tals is also a result of altering dielectric constant. The liquid crystal molecules are
pre-aligned such that they are perpendicular to the RF-field, resulting in a particular
effective dielectric constant of ǫ⊥. The molecules are rotated in a continuous fash-
ion under an applied DC voltage until reaching saturation, at which the state of the
molecules is parallel to the RF-field, producing the effective dielectric constant of ǫ‖.
Therefore, a range of effective dielectric constant between ǫ⊥ and ǫ‖ can be realized.
The liquid crystals in [31] has the following properties: ǫ⊥ = 2.39, ǫ‖ = 3.18,
tanδ⊥ = 0.0061, and tanδ‖ = 0.0016. By applying 0 to 40 V to the phase shifter
containing the liquid crystal mixture, the maximum phase shift was 117 with a
maximum loss of 4.03 dB. In order to realize a reasonable tuning range, it can be
seen that the liquid crystal technology also suffers from high dielectric loss. However,
it has been shown that the loss tangents of some nematic liquid crystals improve with
increasing frequency (measured from 30 to 60 GHz), which provides greater incentive
for using liquid crystals in high-frequency applications [32].
One common trait shared by MEMS switches, PIN diodes, FETs, ferroelectric
thin films, and liquid crystals is their voltage-controlled actuation, which is generally
a precise and repeatable actuation mechanism, although relatively high voltages may
be required. However, as the number of switches increases with more complex designs,
so does the complexity of the biasing layout on the conducting layer(s), which results
in limitations imposed on the RF functionality. This is exemplified by the presence
of four diagonal slits on the ground plane in Fig. 2.3(c), which were necessary for

19
biasing the four PIN diodes. Biasing slits and feedlines, depending on their locations
and the materials used, can interact with the fields of the radiating sections of an
antenna, which may lead to deterioration in the antenna patterns as well as losses.
Also, undesired slot modes can be excited in the biasing slits. Suppression of these
modes requires placing more shorting capacitors along the biasing slits, which is at
the expense of increased complexity and losses. Research on switches using other
actuation mechanisms, such as magnetostatic, thermal, and piezoelectric, has also
received attention [22],[33]–[35].
As an alternative to these voltage-controlled schemes, fluidic control offers a com-
pletely different approach. A coaxial stub microfluidic impedance transformer, also
called COSMIX, was described in [36], with potential applications in reflectarray an-
tennas [37]. A mixture of colloidal barium strontium titanate (BST) and silicone
oil in the coaxial cell is the crucial component of the stub loading, as illustrated in
Fig. 2.5. By varying the volume fraction (ϑ) of BST nanoparticles in the mixture, the
relative permittivity of the mixture can span from 2 to 8 for ϑ of 0 to 0.5; a change
in impedance loading is achieved. The mixture is injected into and out of the coaxial
cell using fluidic control (miniature pumps and valves), a method shared by some of
liquid metal technologies mentioned in Section 2.2.1.
However, a few drawbacks are apparent with this method. A dedicated mixing
component is needed, which increases the size of the device. For every change in
permittivity, the entire coaxial cell has to be completely emptied and replaced with
a new mixture, which seriously compromises the agility of this scheme. The repro-
ducibility of permittivity values is also questionable as the system relies heavily on
thorough dispersion of the nanoparticles in the oil and their precise proportion.

20
Figure 2.5: Reconfigurable reflectarray design using COSMIX [37] c© 2010 IEEE.
2.2.4 Flexible Materials
The development of flexible and wearable electronics has greatly promoted the explo-
ration of using flexible materials in designing reconfigurable antennas [38]–[43]. One
example is the use of thin films of solid metal deposited on a flexible dielectric ma-
terial, as described in [43] and [44], in which microscopic movement of the metalized
membrane was induced by pneumatic techniques. Fig. 2.6 illustrates a switch pro-
totype based on this technology. The movement of the membrane, fabricated from
polydimethylsiloxane (PDMS), is analogous to the movement of the metal bridge
of a MEMS switch. Since the metalized membrane is pneumatically controlled, DC
biasing feedlines are not required and therefore, eliminating the disadvantages of com-
plex biasing structures and the interference with the RF operation associated with
DC-controlled devices.
PDMS, which has become a popular choice as the flexible dielectric material be-
cause of its ease of processing, commercial availability, and flexibility at ambient
temperatures, has a relatively high loss tangent (tanδ in the range of 0.01 to 0.045
measured from 0.1 to 40 GHz [45]). Using this material would lead to higher losses

21
Figure 2.6: Switch design based on pneumatically actuated membranes [44] c© 2012IEEE.
in RF devices and reduced efficiencies of high-Q factor antennas (such as microstrip
patch antennas) [41]. Also, due to the inherent nature of physical movement of the
membrane, microcracks were observed in the thin metal film, which would undermine
the long-term reliability of the fabricated devices, unless the surface of the film was
prepared as an ordered wave to enhance its stretchability [42],[46].
Recent research has demonstrated the alternative of using liquid metals enclosed
in PDMS to create flexible electronics, including antennas [40]–[42]. The use of liquid
metals instead of solid metals allows these reconfigurable antennas to undergo drastic
shape deformation that is macroscopically visible without suffering from issues asso-
ciated with microcracks. Tuning of the resonant frequency of a dipole antenna by
stretching [40] and varying the impedance matching of a patch antenna via flexing
(Fig. 2.7) [41] were demonstrated. The disadvantage of using PDMS is evident in the

22
poor radiation efficiencies of 60% measured for the patch antenna in [41]. Creating
a large conductive area such as the patch or the ground plane using a liquid metal
in PDMS is challenging because directly filling channels that have low aspect ratios
may lead to the collapse of the channels and the uniformity of filling the channels
can be undermined by air pockets and uneven channel height. Sectoring the patch
into a long serpentine channel with rows of PDMS posts has been shown to mitigate
some of the issues in channel filling, but this was realized at the expense of increased
complexity of the structure and the time required to fill the channel [41].
Patch Ground
plane
Figure 2.7: Flexible patch antenna [41] c© 2012 IEEE. The embedded liquid metalforms two conductive layers (patch and ground plane) within the flexible PDMS.
The review of the previously reported means of reconfiguration presented above
reinforces the idea that there is no single means that is ideal for all applications, and
that the selection of a technology for a particular end-use application is driven by the
prioritization of various trade-offs. This review allows for comparison with the novel
switching mechanism proposed in this project, described in detail in Chapter 3.

23
2.3 Selecting a Circularly Polarized Antenna
Section 2.1.3 provided the motivation for developing a reconfigurable CP antenna
with switchable polarization. This antenna also serves the purpose of demonstrat-
ing the viability of the switching mechanism introduced in this thesis, which can be
applied to other reconfigurable antenna designs beyond switchable polarization. In
order to design a functional CP printed antenna with switchable polarization, se-
lecting a suitable antenna type is critical. CP can be achieved with various types
of antennas, some of which were mentioned in Section 2.1.3. Each one has its own
merits and drawbacks. Some prominent examples of CP printed antennas are listed
in Table 2.1 [5],[13],[14],[16],[47]–[51]. Note that the list is by no means exhaustive;
many variations and different types of antennas can be found in literature.
From Table 2.1, it is obvious that no single antenna type can be deemed the
perfect candidate, which reflects the reality of trade-offs in antenna designs. There
are some complementary merits and drawbacks. For instance, hybrid power dividers
or quadrature-phase feeds are not required for single-fed antennas, but identifying the
operating frequency of these antennas is not as straightforward as in the case of their
linearly-polarized versions. Achieving reasonable AR and impedance bandwidths is
important when designing CP antennas, as it increases the antennas’ tolerance to
manufacturing defects and other specification deviations. Many of the antenna types
in Table 2.1 use different techniques to achieve moderate bandwidths at the expense
of increased complexity. Some of the published antenna designs obtained respectable
bandwidths by employing a thick substrate and/or an air layer, thus increasing the
size of the antenna.
Some of the antenna types can be made reconfigurable more easily than others.

24
Table 2.1: Merits and drawbacks of various types of circularly polarized antennas.M
erits
(M)&
Drawback
s(D
)
Quad
rature-phasefeed
not
necessary
Sim
ple
stru
cture
Suitable
forpro
posed
mech
anism
Smallfootprint
Moderateto
largeban
dwidth
Operatingfreq.easily
determined
Narrow
ban
dwidth
Operatingfreq.not
easily
determined
Large
footprint
Trickyto
excite
correctmode
Com
plicatedforproposed
mechan
ism
Thickerstructure
Cou
plingdep
endenton
substrate
heigh
t
Rad
iation
onbothsides
Low
gain
1 M M M D D2 M M M M D D3 M M M D D D4 M M D D D5 M M M D D D6 M M D7 M M M M D D8 M M D D D9 M M D10 M D D
Antenna Types1: Single-fed square and circular patches with perturbations (see Fig. 2.3(b))2: Single-fed rings in TM11 mode with perturbations (see Fig. 2.3(a))3: Single-fed annular rings in TM12 mode with perturbations4: Single-fed rings with perturbations coupled to parasitic elements5: Single-fed stacked patches and rings with perturbations6: Single-fed printed loop with reactive loading7: Single-fed ring slots with perturbations (see Fig. 2.3(c))8: Printed spiral antennas9: Quadrature-phase-fed crossed-dipoles10: Cavity-backed crossed bowtie dipoles

25
For the purpose of selecting an antenna type compatible with the proposed switching
mechanism, types #1, #2, #3, #5, and #7 are shortlisted. Considering the fact that
a novel means of reconfiguration with custom fabrication technology is involved, a
prudent approach is to implement it on a simple structure, which narrows the choices
to a single-fed square or circular patch with perturbations (type #1), a single-fed
ring in TM11 mode with perturbations (type #2), and a single-fed ring slot with
perturbations (type #7). The last choice proves to be the most suitable because slot
antennas generally have greater impedance bandwidth compared to patch antennas
[52], which will be advantageous for this project. Perturbations can be in the form
of openings [1] or stubs [53], which are attached at specific positions to the outer
perimeter of the ring slot. The inherent nature of a slot antenna to radiate on both
sides is sometimes considered a drawback, but it depends on the applications.
With the ring slot chosen as the topology for realizing a CP antenna with switch-
able polarization, the next section will elaborate on the theory behind the generation
of CP specifically for this type of antenna.
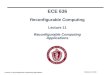
2.4 Realizing Circular Polarization with Ring Slot Antenna
The basis for realizing circular polarization for a single-fed ring slot antenna, as
demonstrated in [1], is the perturbation of the two diagonal linear modes caused by
loading the ring slot with the appropriate pair of rectangular openings, as shown
in Fig. 2.8. Each opening is connected to the ring slot with a short narrow section
of slotline. The openings serve the purpose of lengthening the path of the current
flowing around the ring, and hence lowering the resonant frequency of the antenna.
To gain a better understanding of this idea of perturbation of linear modes, it

26
rectangular
opening
ring slot
pin diode across
a narrow slotline
Figure 2.8: Ring slot antenna with switchable polarization using PIN diodes [1]c© 2003 IEEE.
is important to have a closer look at the field distribution on the simple ring slot
antenna, shown in Fig. 2.9. Assuming the antenna is in transmit mode, power is
transferred from the microstrip line on the bottom side of the substrate to the slotline
feed on the ground plane. Radial stubs are used, which is a common practice to
realize a broadband microstrip-to-slotline transition [54]. From Fig. 2.9(a), it can
be seen that the location of the slotline feed dictates the direction of the overall
LP field being radiated from the ring slot antenna. In this particular case, the y-
oriented slotline feed leads to an x-polarized antenna (i.e. radiated field is x-directed),
as indicated in Fig. 2.9(b). This LP field can be decomposed into two orthogonal
diagonal components which are represented by the dashed arrows. The importance
of this field decomposition will become apparent below.
The positions of the rectangular openings with respect to the polarization direction
of the LP field are crucial. Fig. 2.10 shows the ring slot in linear polarization, with
an opening attached to the ring at different location. In Fig. 2.10(a), the rectangular

27
(a)
y
x
(b)
Slotline
feed
Microstrip feed Ring slot
Figure 2.9: Field distribution on the ring slot antenna. (a) Magnified view of theelectric field distribution at the transition from the slotline feed to the ring slot.(b) Decomposition of the overall x-directed LP field (solid black arrow) into twoorthogonal diagonal components (dashed arrows).
opening is placed on the north side of the ring, where current is the weakest. The
perturbation from the opening on the current is minimal in this case and the antenna
experiences a very minor shift in its resonant frequency. When the opening is placed
on the east side of the ring where current is the strongest, as shown in Fig. 2.10(b),
the current sees a longer path around the ring, which has the effect of lowering the
resonant frequency of the antenna.
This decrease in resonant frequency due to perturbation translates to a phase
lag in the radiated field at a particular frequency, as illustrated in Fig. 2.11. The
general phase response of the radiated field of an antenna near resonance is shown
in Fig. 2.11. The point of zero phase, where the curve crosses the frequency axis,
indicates the resonant frequency of the antenna. Loading the ring slot antenna with an
appropriately placed opening decreases the resonant frequency, which is represented

28
x
Rectangular
opening
(a)
y
(b)
Figure 2.10: Comparison of perturbation on the ring slot current for different positionof the rectangular opening. The black arrow represents the direction of the linearpolarization while the red dashed arrows represents the current flow around the ringslot.
by a shift of the entire phase curve to the left (solid curve to dashed curve). At a
particular operating frequency, the phase of the radiated field from the perturbed
antenna is delayed compared to that from the unperturbed antenna.
Consider the scenarios when a pair of openings are aligned 45 from the direction
of linear polarization, as shown in Fig. 2.12. For the sake of intuitive understanding,
first ignore the presence of the openings. As mentioned earlier, the overall radiated
field can be decomposed into two orthogonal diagonal components. In a similar sense,
the current distribution around the ring slot can also be viewed as the combination of
the current contributions that generate the two orthogonal field components. For both
scenarios in Fig. 2.12, the locations of the openings coincide with the points of current
minima of the component labelled “0”. Consequently, the “0” component in both
scenarios sees minimal influence from the rectangular openings, whereas the “−90”
component has a lower resonant frequency and therefore lags the “0” component

29
FrequencyPh
ase
Operating
Frequency
Phase
Difference
unperturbed
perturbed
Figure 2.11: Illustration of phase lag in the radiated field due to the lowering ofresonant frequency of an antenna. The solid curve represents the phase response ofthe antenna without perturbation, whereas the dashed curve represents that withperturbation.
in phase. With some adjustments to the parameters of the antenna, such as the
ring radius, the length of the connecting slotline, and the size of the opening, the
two orthogonal components (modes) can be made 90 apart with equal magnitude.
Under this condition, circular polarization (CP) is achieved and the type of CP (left-
or right-handed) is determined by the phase relation between the two components, as
shown Fig. 2.12. Unlike a microstrip antenna, an ideal slot antenna radiates almost
equal amount of power on both sides of the antenna, as mentioned in Section 2.1.3.
Radiation leaving from the top side of the antenna has a reverse CP compared to the
radiation leaving from the bottom side of the antenna. The convention used in this
thesis for referring to the polarization of the ring slot antenna is that of the radiation
leaving from the top side of the antenna (wave traveling in the +z-direction away
from the antenna). That is, an RHCP ring slot antenna is referring to an antenna
that radiates RHCP wave in the +z-direction and LHCP wave in the –z-direction.
If the two pairs of openings are simultaneously present in the antenna structure,

30
-90° 0° 0° -90°
LHCP RHCP
y
x
(a) (b)
Figure 2.12: Ring slot antenna operating in (a) LHCP and (b) RHCP states forradiation leaving the antenna in the +z-direction (out of the page). The polarizationis reversed in each case for radiation leaving the antenna in the –z-direction.
the antenna will generate an LP field in the x-direction, with a lower resonant fre-
quency compared to the case when none is present. The reconfiguration in polariza-
tion arises from selectively allowing the current to bypass the appropriate rectangular
openings. Referring to Fig. 2.8(a), the pair of openings are bypassed when the PIN
diodes connected across the narrow slotline are forward biased (behaving as shorted
switches). From the RF perspective, the pair of openings are not present and the
current flows around the ring slot to generate a linearly x-polarized radiation. When
the diodes are in the “off” state (reverse biased), the current of one of the diagonal
linear modes has to flow around the openings, leading to a phase lag compared to
the other diagonal mode. Given the locations of the openings with respect to the mi-
crostrip feed, the resulting CP is left-handed. For the antenna shown in Fig. 2.8(b),
with diodes 1 & 3 on and 2 & 4 off, LHCP radiation is generated, traveling in the
+z-direction. When diodes 1 & 3 are off and 2 & 4 are on, RHCP radiation traveling
in the +z-direction is produced.

31
Note that the two reconfigurable antenna designs (Fig. 2.8) in [1] could each
realize two polarization states (linear/LHCP and LHCP/RHCP), but not all three
polarization states in one antenna. This is because of the difficult challenge of arriving
at a combination of dimensions that sees the impedance bandwidths for all three
polarization states coinciding in the same range of frequency while maintaining a
reasonable AR bandwidth also within the same range. Generally, the AR bandwidth
of a circularly polarized antenna is noticeably smaller than its impedance bandwidth.
The performances of the reconfigurable ring slot antennas (LHCP/RHCP only)
in [1] and in [53], as well as two other similar reconfigurable antennas, are listed
in Table 2.2. All four antennas used PIN diodes as the switching elements. They
also operated in the same frequency range around 2.4 GHz, which falls in one of the
industrial, scientific, and medical equipment (ISM) bands [55]. They will serve as
the performance benchmarks for the antenna fabricated in this project, described in
Chapter 6. It should be noted that an obvious area of commercial applications for
switchable polarization is in GPS, which currently operates in the L1 (1.57542 GHz)
and L2 (1.2276 GHz) bands [5, ch.2]. However, the proposed antenna will be devel-
oped for operation in the 2.4 GHz ISM band for comparison with existing works.
Antenna designs published in [18] and [19] were capable of three or more polariza-
tion states (LP/RHCP/LHCP and LP/LP(orthogonal)/RHCP/LHCP, respectively),
which is impressive. However, such a feat came with some trade-offs. In [18], the over-
all three-state bandwidth — the strictest definition of bandwidth for antennas with
switchable polarization, which is defined as the bandwidth within which a reconfig-
urable antenna achieves both |S11| < −10 dB for LP/LHCP/RHCP and AR < 3 dB
for LHCP/RHCP — was actually zero. This means that there was no range of fre-

32
quency within which the antenna could truly achieve all three polarization states. In
order to achieve a three-state bandwidth of 2.2%, the thickness of the antenna in [19]
was significantly greater than the other antenna designs, which made it noticeably
bulkier. Also, both designs had complicated matching topologies.
Table 2.2: Performance of notable antennas in literature with switchable polarizationin the 2.4 GHz range.
Criteria [1] [53] [18] [19]
# of pol. states 2 2 3 4Thickness5 0.8 mm 1.6 mm 1.6 mm 8.2 mm|S11| BW 37.5% 20.9% 1.17% 13.1%
AR BW (LH) 4.3% 4.2% 0.74% 4.5%AR BW (RH) 3.4% 4.1% 0.72% 2.2%Min. AR (LH) 0.5 dB 1.0 dB 0.9 dB 1.0 dBMin. AR (RH) 1.2 dB 1.25 dB 0.5 dB 0.8 dBOperating Freq. 2.38 GHz 2.63 GHz 2.45 GHz 2.45 GHzBroadside Gain 4 dBi 3.1 dBi 5.85 dBi 5.87 dBi3-state BW N/A N/A 0% 2.2%
5Thickness accounts for the dielectric layers of the antenna structure and excludes
support structures such as measurement holders.
With the principles of operation of the reconfigurable ring slot antenna explained,
Chapter 3 introduces the novel means of pneumatically controlled reconfiguration,
while Chapter 5 describes in detail how this switching mechanism can be incorporated
into the design of a ring slot antenna.

33
Chapter 3
Pneumatically Controlled
Switching Mechanism
The concept of a pneumatically controlled switching mechanism, which is a major
focus of this thesis, shares one similarity with the fluidic control described in Sec-
tion 2.2.3 — the need of generating a pressure gradient in the fluid inside channels.
The key differences are the medium and the object being transported. The medium in
the proposed mechanism is air rather than a liquid, and the object being transported
is a solid slug instead of a liquid. The advantage of moving a solid slug instead of a
liquid metal or high-permittivity liquid mixture is the precise position control, since
a solid slug does not change shape or deform during its movement within the channel
like liquids do. The issue of having residue being left behind on the inner surface of
the channel after the displacement of the liquid matter is completely avoided in the
mechanism introduced here.
In this chapter, the concept of the basic switching mechanism is described. The
reasons behind the selection of the process and the material for constructing sample
channels are given, along with the overview of the process steps and the results of the
mechanical testing of the switching mechanism.

34
3.1 Concept
The switching mechanism, in its basic form, is illustrated in Fig. 3.1. RF reconfigu-
ration is a result of the capacitance variation in the region where a gap in the metal
layer is present. Initially, a series capacitance is associated with the gap, as shown
in Fig. 3.1(a). When a pressure gradient is generated by a stream of pressurized
air entering through one end of the channel, the dielectric slug is transported to the
other end of the channel in the direction of air flow. The slug width and thickness are
slightly less than those of the enclosing chamber, such that air flow is not completely
impeded and the movement of the slug is guided. As the slug rests on top of the gap,
as shown in Fig. 3.1(b), the metal coating on the underside of the slug bridges the
two halves of the metal layer. A thin layer of insulating material deposited on top of
the slug’s metal coating ensures a capacitive contact between the slug and the metal
layer instead of a metal-to-metal contact. The series capacitance across the gap is
now supplemented with additional capacitance, and this capacitance enhancement is
the basis of the RF reconfiguration exemplified by the devices presented in this thesis
(a switch in Chapter 4 and an antenna in Chapter 5).
The system for creating the pressure gradient and its integration in the fabri-
cated devices is beyond the scope of this thesis, although using miniature pumps,
which are a well-established technology in the field of microfluidics, is a promising
method. A preliminary study is presented in Appendix B. The minimum actuation
pressure required to move the slug will be investigated with a fabricated RF switch
in Section 4.4.
In order for this switching mechanism to be deemed viable for reconfigurable
antennas, its performance in both mechanical and RF criteria must be tested. Since

35
Substrate
Cover
Metal-plated slug Metal layer
Air
Channel wallGap
Air
Bottom View
Side View
(a) (b)
Figure 3.1: Pneumatic control of the slug position and the resulting capacitancevariation. Channel wall is not shown in the side view.
the mechanical criterion, i.e. the ability to move the slug back and forth within
a channel, can be evaluated independently of the RF criterion, the focus of this
chapter is on developing a reliable and repeatable process for fabricating channels
and on the mechanical testing of the switching mechanism. The understanding of
fabrication tolerances and constraints will be invaluable for designing the capacitive
switch (Chapter 4) and the antenna (Chapter 5).
The advantages and disadvantages of this switching mechanism will be discussed
in Section 4.3, after the RF performance of the fabricated switch is evaluated.

36
3.2 Process and Material Selection for Channel Fabrication
The channel is a layer of patterned polymer sandwiched between a cover and a met-
alized substrate. The channel widens as it meets the chamber within which the slug
is confined, as seen in Fig. 3.1. With the goal of testing only the mechanical aspect of
the switching mechanism in mind, it would be wise to begin with a simplified process
involving only the necessary layers to construct the physical channels. This would
facilitate troubleshooting and reduce the number of iterations required to realize a
dependable process. Layers related to the RF aspect, namely the metal layer on the
substrate and the metal coating on the slug, are hence omitted here.
In order to take advantage of the access to the Advanced Micro/nanosystems Inte-
gration Facility (AMIF) at the University of Calgary and the experience and training
on the equipment gained by the author in previous projects, the fabrication process
and material selection are tailored towards those of MEMS. Much of the equipment
in AMIF is compatible with MEMS production and specifically, the photolithography
process.
The choice to fabricate the channels in-house rather than submitting designs to
third-party fabrication facilities arises from the fact that the channel structure is not
compatible with any standardized fabrication technologies such as complementary
metal-oxide-semiconductor (CMOS) and silicon-on-insulator (SOI). The benefit of
developing a custom process in an on-campus fabrication laboratory is the flexibility
of modifying the process parameters and procedure, and the relatively short iterative
fabrication cycles in refining the process steps. However, the iterative nature of
arriving to a practical and repeatable process presents a surmountable yet difficult
challenge because of the substantial amount of time and varying factors associated

37
with developing a custom process.
The photolithography process is chosen for the fabrication of the channels because
it offers the flexibility of thickness variation, which is beneficial during the RF de-
sign and for the future consideration of miniaturizing a device. In a typical MEMS
photolithography process, a photoresist is deposited on a substrate, exposed to ultra-
violet (UV) light under a photomask, and developed to leave behind some patterned
features on the substrate. The patterned features, composed of solidified photoresist,
can either be a temporary fixture used for etching the pattern into the substrate or a
permanent fixture as part of a complete device. The thickness of a given photoresist
on the substrate can be varied within a finite range by adjusting the spin speed during
its deposition. Most of the commercially available photoresists stocked in AMIF are
capable of thicknesses between 0.5 µm and 250 µm with a single deposition. The
photolithography process, for a particular photoresist, is described in greater detail
in Section 3.3.
The channels should be constructed with a low-loss, low-permittivity dielectric,
such that their influence on the RF performance and the field distribution can be kept
at a minimum. In order to fabricate channels with a thickness between 150 µm and
250 µm, which is the lower limit of the slug thickness at which its structural integrity
remains acceptable, the ideal choice of photoresist is SU8-2100. Slugs thinner than
150 µm are deemed too fragile to handle. The datasheet of SU8-2100 suggests the
possibility of realizing 250 µm in one deposition. Thinner photoresists can be used
to attain similar thickness if consecutive stacking depositions are performed, but this
method of multiple depositions would compromise the repeatability in the thickness
achieved and complicate the overall process. SU8-2100 is selected also because it is

38
an epoxy, which is chemically and mechanically inert after processing. This makes it
an ideal candidate for creating features on a device.
However, SU8-2100 does suffer from two major drawbacks that need to be ad-
dressed before it becomes part of a reliable and repeatable fabrication process for
any device. The first disadvantage is the difficulty in its handling. SU8-2100 is an
extremely viscous photoresist, which requires special pouring technique during its
deposition. The second issue with the photoresist is its inconsistent adhesion to the
substrate due to the buildup of internal stress during its processing. Strict compliance
to an established set of process steps would generally increase the yield of devices.
Patience and careful observation, along with troubleshooting skills gained only from
experience and repeated trials, are key to the successful application of SU8-2100.
As a result, the channels described in this chapter serve two important purposes
— testing the feasibility of moving slugs confined inside channels of different config-
urations, and refining the fabrication steps of processing the SU8 photoresist.
3.3 Processing SU8 Photoresist
As mentioned in Section 3.2, SU8 is one of a few highly viscous and commercially
available photoresists that can be used to attain chemically inert structures with a
thickness of 200 µm. However, because of its viscosity, it is also very difficult to
work with. Detailed steps for processing the photoresist in AMIF, customized by the
author, can be found in Appendix C. In this section, an overview of the process is
described, with the introduction of a photomask designed specifically to produced
channels for mechanical testing of the switching mechanism.

39
Processing SU8 photoresist (in a controlled cleanroom environment with yellow
lighting) generally involves:
1. Cleaning a 4” circular wafer with a Piranha etching solution.
2. Exposing to hexamethyldisilazane (HMDS) in a vacuum oven, which will pro-
mote the adhesion between the photoresist and the wafer.
3. Pouring an appropriate amount of the photoresist at the centre of the wafer.
This is one of the most critical steps of the entire process which requires practice.
4. Spreading the photoresist evenly at a targeted thickness by spinning the wafer
at a set speed in a spin coater.
5. Soft-baking the deposited photoresist on a programmable hot plate to evaporate
the majority of the solvent in the photoresist gradually. Drastic temperature
changes would cause thermal stress in the photoresist, which leads to adhesion
issues.
6. Exposing the photoresist to UV light under a photomask using the mask aligner,
for a predetermined duration corresponding to the targeted thickness.
7. Post-exposure baking the photoresist on the programmable hot plate gradually
helps facilitate the cross-linking of the photoresist in the exposed area, which
becomes insoluble in the developer solution.
8. Developing the photoresist in an agitated bath of SU8 developer solution. Unex-
posed photoresist is dissolved in the solution, leaving behind patterned features
identical to those on the photomask.
SU8 is a negative photoresist, which means that any UV-exposed area of the
photoresist remains on the wafer. Therefore, a photomask designed for a negative
photoresist (identified as non-inverted/dark) is mainly opaque. A screen-shot of the

40
photomask design used to fabricate the sample channels is shown in Fig. 3.2. The
design configurations used are discussed in detail in Section 3.4. The photomask was
drawn using Cadence’s Virtuoso, a layout editing tool, and the mask was fabricated
by the Nanofab at the University of Alberta (precision within 2 µm). The dark area
shows up as opaque on the square-shaped photomask which is made of a 0.09” thick
glass plate. The areas shown as red are clear on the photomask, so allowing UV
light to pass through during exposure. Having channel structures populating most
of the wafer surface also serves the purpose of providing structural support when the
cover layer (a glass wafer) is stacked on top of the channels after the photoresist is
patterned.
Various issues were encountered while refining the photolithography process, and
after numerous iterations, most were either eliminated or kept under control:
• Any bubbles trapped in the photoresist during the pour led to localized un-
evenness. Unevenness causes adhesion issue and inconsistent thickness of the
patterned features. Practice-pouring the photoresist was key to refining the
technique.
• Even with an evenly spread photoresist, unevenness was observed during the
soft bake. The cause was determined to be the slight uneven heat distribution
on the wafer. The problem was mostly alleviated with placing a thin piece
of aluminum plate between the hot plate and the wafer to facilitate the heat
transfer, as well as removing as much resist removal solution residue as possible
from the bottom side of the wafer.
• Stress marks around the exposed area were observed during the post-exposure
bake. The stress marks caused localized unevenness, as well as issues with

41
Figure 3.2: Computer screen-shot of the photomask design used to build the testchannels.
completely removing unexposed photoresist. White residue was left despite
extended period of submersion in the developer solution. Two possible causes
for the stress marks are the density of features on the photomask and the
temperature ramp rate. Instead of designing and ordering a new mask, the
temperature ramp rates for both the heating and cooling steps were lowered by
about 15%, which resolved this issue in most trials.
• Hard baking, which is a recommended step after developing when the photore-
sist is used for creating permanent fixtures, is supposed to further strengthen
the photoresist. However, the high temperature (165C) required caused sig-
nificant amount of thermal stress in the patterned photoresist, which led to a

42
complete delamination and curling of the features, as shown in Fig. 3.3. Hard
baking was not performed for any subsequent fabrication trials.
• Adhesion issue, due to the aforementioned reasons as well as causes unknown,
was largely eliminated but still appeared in isolated areas on a small number of
processed wafers.
Good Poor adhesion
Stress-induced delamination
and curling
Complete detachment with
portion of silicon ripped
from wafer surface
Good
adhesionPoor adhesion
in most area
Figure 3.3: Adhesion issue in the development of the SU8 process.
A successfully fabricated wafer with good SU8 thickness uniformity (200± 30µm)
is shown in Fig. 3.4. In this particular instance, SU8 was processed on the rough side
of a silicon wafer to improve the chance of achieving good adhesion. The wafer was
diced into sections and the pneumatically controlled switching mechanism was tested
for various channel configurations, as described in Section 3.4.

43
Figure 3.4: SU8 resist successfully deposited and developed with minimal adhesionissue.
3.4 Channel Configurations
With the channels built on a wafer, slugs were required to complete the simple testing
structures. Cover slips of thickness #1.5 (0.16 to 0.19 mm) were diced into slugs of
various lengths and widths. In general, the slugs were diced such that they were
slightly narrower (80 µm) than the chambers inside which they would be placed.
This provided an average clearance of 40 µm on each side of the slug, which was
deemed large enough for unhindered linear movement of the slug inside the chamber
and small enough to prevent any rotational movement of the slug. For instance, a
chamber that is 1 mm wide is fitted with a 0.92-mm-wide slug. Subsequently in this
section, a slug with a listed width of 1 mm is in fact 0.92 mm wide; a listed chamber
width of 2 mm equates to a slug width of 1.92 mm.
The actual thickness of the few cover slips used fell in the range of 0.175 to 0.18 mm

44
consistently , which was quite ideal for the SU8 channel thickness of 200 µm, offering
about 20 µm of clearance.
As mentioned in Section 3.2, the slugs were not coated with a metal layer as the
thin coating was not expected to interfere with the testing of the slug movement. The
difference in friction characteristics was not a significant concern since the slug was
expected to be lifted slightly by the in-rush of pressurized air causing its movement
inside the chamber. Though outside of the scope of this work, a fluid dynamics based
simulation could be performed for comparison.
3.4.1 Simple Channels
A section on the wafer was dedicated to testing simple channels and determining
the range of channel dimensions with which good SU8 adhesion could be attained. A
picture of the setup is shown in Fig. 3.5. A circular feature terminated each end of the
channels. These 3-mm-diameter features identified the locations where holes would
be drilled in the wafer to provide access for air flow from the backside of the wafer.
The slugs would be placed in the chambers and a second wafer would be adhered on
top of the channels to complete a sealed prototype. In order to minimize the number
of fabrication steps involved during this preliminary test stage, some modifications
were made that would simplify fabrication, yet still allow the mechanical testing of
the switching mechanism. Hole drilling was not performed as the forces involved
had a tendency to crack the wafer. A microscope slide was used to substitute the
covering wafer, also shown in Fig. 3.5, such that the area directly above the chambers
was still covered while leaving the ends of the channel uncovered to allow air flow.
Instead of permanently adhering the microscope slide to the channels, clamps were

45
used to secure the slide in place, which allowed easy swapping of slugs and layer
adjustments in this preliminary prototype. The essence of testing the slug movement
due to pressure gradient inside the chambers remained valid with this setup. A light
layer of marker ink was applied on the topside of the slugs to help identify their
positions in the chambers during testing.
Slug lengths:
Channel intake widths:
0.5mm & 0.8mm
Slug lengths:
3.5mm to 7mm
Chamber widths:
1mm & 2mm
10mm
Channel wall
widths:
0.7mm & 1mm
Figure 3.5: Testing of the switching mechanism with simple channels. The rectangularslugs can be identified by the wiggly lines drawn with a marker pen. At this particularinstant, four slugs have already been moved, and the remaining two are about to bemoved.
Multiple combinations of slug lengths, chamber widths, channel intake widths,
and channel wall widths were planned with the design of the photomask. As observed
in Fig. 3.5, good adhesion was obtained, giving confidence in the range of channel

46
dimensions viable for future designs of RF devices. As a rule of thumb, channel intake
width should be about half of the chamber width, such that the ends of the chamber
have a well-defined wall to stop the moving slug, while still allowing a sufficient volume
of air to pass and move the slug. In this instance, the pressurized air originated from
a can of household compressed-gas dust-cleaner (through the red tube in Fig. 3.5). A
constant stream of gas was applied, and the tube was moved from the bottommost
channel towards the topmost channel. It was observed that the slug did not move
until the tube was directly aimed at the end of its corresponding channel, indicating
that the air flow was directed along the channel as designed with no air leakage (or
very minimal leakage that the slug in the adjacent channel was not influenced). Each
slug was found to be capable of moving back and forth inside its channel smoothly.
3.4.2 More Complex Configurations
It can be expected that the channels used in a functional RF device, such as a switch
or an antenna, would involve more complex features beyond the case of a single slug
in a straight channel demonstrated in Section 3.4.1. The ability to manipulate the
direction of air flow is the subject of this section, in which bends in channels and
multiple slugs in one channel are described.
Fig. 3.6 shows a meandering channel with several 90 bends. The slug moved with
the air flow back and forth inside the chamber without any issue, which confirms that
bends do not impede the air flow or affect air leakage.
A combination of slug positions for a three-port three-slug prototype is shown in
Fig. 3.7. When pressurized air was applied at port A, the air flow first pushed the
leftmost slug away from its port and then split off at the junction to move the other

47
Figure 3.6: A meandering channel.
two slugs towards their corresponding ports. Similar behaviour was observed when
pressurized air was applied at ports B and C. This test demonstrated the feasibility
of incorporating multiple slugs that move in orthogonal directions in a single channel,
and that airflow around a slug was capable of moving other slugs.
The configuration shown in Fig. 3.8 is a proof of concept of channel blocking. The
device consisted a blocking slug (1 mm × 7 mm), a main slug (1 mm × 8 mm), and
four access ports. The main slug was free to move within its chamber (positions #1
and #2), as long as the blocking slug resided closer to port A. This was accomplished
by applying pressurized air at port C. When pressurized air was applied at port A, the
blocking slug would slide past the intersecting channel BD and stop at the position
closer to port C. Channel BD would be blocked, as shown in the “Block mode”
picture in Fig. 3.8. With the blocking slug in its blocking position, even if the supply
of pressurized air at port A was discontinued, the blocking slug would remain in place
regardless of any pressure gradient in channel BD. One of the conditions required to
realize a functional channel blocking device is that the blocking slug must be long and
narrow, which guarantees its forward progress as it approaches the intersection and
avoids the potential issue of having one of the slug corners caught at the intersection.

48
A
B
Slugs
B
C
Figure 3.7: A device with multiple chambers in each channel path. Each letterindicates the port at which pressurized air was applied in each instance.
If another channel is constructed parallel to channel BD, which is also intersected
by channel AC, the blocking slug in channel AC can control the two parallel channels,
and a four-state device can be achieved. Expanding on this idea, a nine-state device
is proposed, as shown in Fig. 3.9.
Each of the horizontally-sliding (main) slugs can rest in three positions, while the
vertically-sliding (blocking) slugs can block either channel CH or channel DG in one
instance. Nine different combinations of the main slugs can be achieved. Fig. 3.9
shows how the device can transform from state “1-4” to state “3-5” in four sequential
steps of applying pressurized air at the appropriate port.
The dimensions of the slugs and the separation distance between channels were

49
C
D
Position #1
Block mode
B
C
Position #2 A
Blocking
slug
Main
slug
Figure 3.8: Prototype demonstrating the concept of channel blocking.
given some careful considerations to minimize the chance of slugs getting caught
while crossing the junctions. Two design rules should be adhered to when designing
networks of intersecting channels:
1. The length of a slug should be at least 2.5 times the width of its intersecting
channel. This ensures that the slug will not catch one of the corners of the
intersecting channel due to the possible rotation (very slight but not completely
zero) of the slug during its movement across the intersecting channel.
For instance, the length of the main slugs is 4.5 mm given the width of their
intersecting channels AF and BE being 1.5 mm. Similarly, this rule is applied
to the blocking slugs (length 8 mm) and their intersecting channels CH and
DG (width 3 mm).
2. For a blocking slug that is required to span across two intersecting channels
during its movement, the separation distance between its intersecting channels

50
A B
Port sequence for
applying pressurized air:
B G A H
1 2 3
4 5 6
A B
C
D
EF
H
G
1.5
8
4.5
35 5
Blocking slug
Main slug
1 2 3
4 5 6
A B
C
D
EF
H
G
Dimensions in mm
4
1.5
Figure 3.9: Concept of a nine-state device and its fabricated channels.

51
should be greater than or equal to half the length of the block slug.
In this case, the separation distance between channels CH and DG is 4 mm
while the length of the blocking slugs is 8 mm.
Other interesting configurations, which are beyond the scope of this thesis project,
can be explored in the future. The RF devices (a switch and an antenna) that are
described in Chapter 4 and Chapter 5 do not require the more complex channel
configurations such as the multi-state topologies, but this preliminary feasibility study
of elaborate channel designs offers an interesting direction of future work.
In this chapter, the novel switching mechanism of pneumatically controlling solid
slugs inside channels was introduced, with the process and material selection described
in detail. Prototypes of both simple and complex channel configurations were fab-
ricated and tested, which demonstrated the viability of the concept of manipulating
the positions of enclosed slugs with pressure gradient.
With the mechanical aspect of the switching mechanism tested, Chapter 4 docu-
ments the viability test of the mechanism with respect to RF performance, for which
a capacitive switch was designed and fabricated.

52
Chapter 4
Design and Fabrication of a
Capacitive Switch
The design and fabrication of a pneumatically controlled capacitive switch is described
in detail in this chapter. The consistency achieved between simulated and measured
RF results can be considered an intermediate milestone preceding the implementa-
tion of the switching mechanism in more elaborate and practical designs, such as a
reconfigurable antenna with switchable polarization (Chapter 5).
As mentioned in Section 2.2.1, a variety of RF switches are available on the market,
and the selection of a switch depends on the application and the priority of different
figures of merit and trade-offs. The pneumatically controlled capacitive series switch
offers a low-loss alternative actuation mechanism, with great topological flexibility
due to the absence of electrical biasing structures. This mechanism replaces biasing
feedlines in the conducting layer with air channels in a separate dielectric layer, which
offers greater flexibility in the RF design of reconfigurable devices, such as antennas.
Substantial part of the work in this chapter has been published in [56] and [57].

53
4.1 Structure and Fabrication Process
The switch consists of a gap in a microstrip line that can be bridged by a movable
copper-coated slug, as illustrated in Fig. 4.1, and with the switching concept as de-
scribed in Section 3.1. The slug is free to move within an enclosed channel formed in
a polymer layer situated between the substrate and the cover. Pneumatic ports are
incorporated at the ends of the channel structure, which both limit the slug move-
ment and also allow pressure gradients to be applied to the channel. Alternating the
direction of pressure gradient in the channel will cause the slug to move, and so the
device will switch between closed and open states, as shown in Fig. 4.2. When the
slug rests on top of the gap in the closed state, the significant increase in capacitance
due to the overlapping area between the slug and the microstrip across the gap creates
an RF capacitive short.
The slug and the microstrip have similar widths to minimize discontinuity in the
closed state. The copper-coated side of the slug faces the microstrip to maximize
the capacitive coupling in the closed state. A thin layer (200 nm) of silicon dioxide
is sputter-deposited on top of the copper coating of the slug to ensure a capacitive
contact instead of a metal-to-metal contact.
The fabrication process, developed by the author, is depicted in Fig. 4.3. The
substrate can either be a 30-mil-thick (0.762 mm) Rogers RO4350B hydrocarbon
ceramic laminate board (ǫr = 3.66, tanδ = 0.004) or two stacked borosilicate glass
wafers (each 0.5 mm thick, ǫr = 4.6, tanδ = 0.005), offering good design flexibility.
The laminate board comes with a 35-µm-thick copper cladding. Additional steps
of sputter-depositing/electroplating 5 µm of copper on the top and the bottom side
are required if the stacked glass wafers are used. The microstrip line with a gap

54
Cover
(glass)
Copper-coated slug
(glass & copper)
Channel
(polymer)
Microstrip
(copper)
Substrate
(glass or laminate)(glass or laminate)
Ground
(copper)
35mm
20mm
25mm
Port A
Port B
Figure 4.1: Exploded view of the switch showing various layers involved.
is patterned on the substrate. Copper is coated on top of a 0.18-mm-thick cover
slip and 1.87-mm-wide slugs of various lengths are diced out. SU8 photoresist with a
thickness of 0.2 mm is deposited and patterned on a glass wafer to produce the covered
channel. 0.8-mm-wide holes are drilled on the glass to serve as inlet ports. The three
components of the switch — the substrate, the slug, and the covered channel — can
be processed simultaneously, which allows greater adaptability and easy replacement
of defective parts. Adhesive can then be applied at specific locations outside the
channel, the components aligned, and the glue left to cure to produce a prototype

55
Closed Switch
Substrate
Cover
Open Switch
Channel wallAir
AirPort B
Gap in microstripCopper-
coated slug
Ground
Microstrip
Port A
Figure 4.2: Side profile illustrating two states of the switch.
switch. The width of the microstrip is 1.75 mm on the laminate to yield Zo = 50Ω.
The channel chamber has an inner width of 1.95 mm, which offers 40 µm of clearance
on each side of the slug. Coax connectors (not shown in figures) are then soldered on
the ends of the microstrip to allow for RF measurement.

56
Substrate
Cover
Deposit & pattern resist
on glass wafer
Pattern copper on substrate
Deposit copper on cover slip
& dice out slug
Cover
Drill holes in glass
Cover
Apply adhesive
Align layers & assemble
Substrate
Cover
Figure 4.3: Custom fabrication process.
4.2 Simulation
The switch was simulated for two different slug lengths and two different microstrip
gap sizes in HFSS (a commercial finite element method solver). Since the precise
profile of the contact between the slug and the microstrip was difficult to predict,
the effects arising from the deposited silicon dioxide on the copper-coated slug and
the microstrip’s copper surface roughness have been combined into one quantity,
called hair. It represented the average air gap separation between the slug’s and
the microstrip’s copper layers in simulations. Due to the lateral dimensions of the
switch being much greater than the thicknesses of its layers, it was expected that the
performance of the switch is much more sensitive to variations in layer thicknesses,
especially hair. The simulated results, which were de-embedded to the edge of the

57
glass cover and ignored the effect of the coax-to-microstrip transitions, are shown in
Fig. 4.4 and Fig. 4.5.
0 5 10 15 20 25−1
−0.8
−0.6
−0.4
−0.2
0
Freq (GHz)
|S21
| (dB
)
Ls=6, h
air=15
Ls=8, h
air=15
Ls=6, h
air=10
Ls=8, h
air=10
Ls= 6 & 8, h
air= 0.5 & 1
Figure 4.4: Simulated insertion loss of the closed switches, for two different sluglengths (Ls in mm) and several average air gap separations (hair in µm), given mi-crostrip gap of 2 mm.
From this it can be seen that the losses from the dielectric and the conductor were
accounted for. For the switch in the closed state, a large air gap separation poses a
lower limit in the switch’s frequency range. But even for an unlikely high gap value
of 15 µm, the insertion loss remains below 0.5 dB within the range of 4 to 15 GHz.
For the switch in the open state, the isolation is solely determined by the size of the
microstrip gap, g, and as expected, the larger gap of 2 mm offers better isolation.
Performance degradation from misalignment of the layers was also investigated in
simulations and it was determined that an error as large as 0.1 mm has negligible
effect, which is not surprising for this simple microstrip structure with a slug in the

58
0 5 10 15 20 25−40
−35
−30
−25
−20
−15
−10
−5
0
Freq (GHz)
|S21
| for
ope
n sw
itch
(dB
)
|S11
| for
clo
sed
switc
h (d
B)
Ls=6, h
air=15
Ls=8, h
air=15
Ls=6, h
air=10
Ls=8, h
air=10
OpenClosedg = 2mm Closed
Ls = 6 & 8
hair
= 0.5 &1
g = 2mm
g = 2mm
g = 1mm
Figure 4.5: Simulated return loss of the closed switches (scenarios similar to those inFig. 4.4); and simulated isolation of the open switches, for two different microstripgaps (g in mm).
scale of millimeters. This knowledge of a good tolerance to misalignment is beneficial
during the design and production of the device.
4.3 Fabrication and RF Measurement
Different samples of the covered channels for housing 6-mm and 8-mm long slugs
were fabricated. As mentioned in Section 3.4.1, the glass cover could potentially
crack during mechanical hole drilling. An example of a cracked cover is shown in
Fig. 4.6. The yield of successfully drilled glass covers improved with practice.
The use of glass wafers as the substrate was first considered. A copper layer with

59
Figure 4.6: Cracked glass cover from mechanical drilling.
a thickness of 4 µm was coated on a 0.5-mm-thick glass wafer using a magnetron
sputtering deposition system, as described in Section 4.1. A thin layer (100 nm) of
titanium was used as the seed layer to enhance the adhesion between the glass surface
and the coated copper. Adhesion appeared to be good initially and passed adhesion
tests. The copper-coated wafer was then patterned via photolithography, using a
photomask populated with several microstrip designs and etched in a ferric chloride
bath. The resulting wafer is shown in Fig.4.7. Pockets of air appeared underneath the
microstrip line, which was a copper adhesion issue likely caused by thermal stresses
in the copper film from the sputter deposition process. This issue may be mitigated
by heating the glass wafer during the sputter deposition, which should reduce the
thermal stress on the copper film after the process.
The alternative of using a laminate board as the substrate was explored, with the
microstrip lines milled out from the board. Fig. 4.8 shows a successfully fabricated
switch with a 2-mm microstrip gap on the laminate board. The initial prototype

60
Delamination of
deposited copper
Figure 4.7: Copper adhesion issue on the patterned glass wafer.
device was clamped together, so allowing easy reconfiguration and adjustments to
the layer alignment and channel geometries. The measurement setup is illustrated in
Fig. 4.9.
After the assembly of the prototype device, coaxial cables were attached to the
SMA connectors to allow RF measurements to be performed. The state of the switch
was then successfully changed between open and closed, using pneumatic control of
the slug, as described in Section 3.1. This demonstration of the actuation mecha-
nism was accomplished by alternately applying short bursts of air from a household
compressed gas duster at the two inlet ports (similar to the method employed in Sec-
tion 3.4.1). The results from three consecutive measurements of the closed switch are
plotted in Fig. 4.10 (up to 15 GHz, which is near the upper operating limit of SMA
cables and connectors). The overlapping curves demonstrate the great repeatability

61
ClosedPort B Port A
Support
features
Alignment
markChamberSlug
50mm
20mm
Open 25mm
Figure 4.8: Fabricated switch in closed and open positions.
of the switch behaviour. This repeatability test also served to settle the concern of
the slug potentially bouncing too far away from the end of its chamber. The good
alignment of measured data after numerous switching actuations demonstrates that
any variation in slug resting position has a negligible effect on the performance of the
switch, and that the switch operating repeatability (from open to closed) is good, i.e.
the mechanical performance of the switch is as anticipated. The results, however, also
expose the main drawback of the measurement design of the switch, which is the pres-
ence of two coax-to-microstrip transitions. The insertion loss becomes significantly
higher than the simulated values at frequencies higher than 3 GHz.
To present an accurate report on the RF performance of the switch alone, a

62
Figure 4.9: Experimental measurement setup of the switch.
Thru-Reflect-Line (TRL) calibration [58] was performed to remove the undesirable
effects of the coax-to-microstrip transitions as well as the microstrip sections from the
transition to the edge of the cover. The idea behind the TRL calibration in virtually
moving the reference planes of the measurement is depicted in Fig. 4.11. The custom
TRL calibration standards are shown in Fig. 4.12. The “reflect” standard was an
0 5 10 15−2
−1.5
−1
−0.5
0
Freq (GHz)
|S21
| (dB
)
0 5 10 15−40
−30
−20
−10
|S11
| (dB
)
Figure 4.10: Overlapping curves showing good repeatability of the switch. Each tracerepresents a separate measurement taken after closing the switch.

63
open-ended microstrip line. Two “line” standards were used to cover the measured
range of 0.5 to 15 GHz. Six separate measurements — switch, thru, reflect (port1),
reflect (port2), line#1, and line#2 — were performed to collect the necessary data
for the TRL program to generate the de-embedded results.
DUT(Device
Under Test)
Coax-
to-
Micro-
strip
Micro-
strip
Line
Coax-
to-
Micro-
strip
Micro-
strip
Line
De-embedded
reference
plane
De-embedded
reference
plane
Initial
reference
plane
Initial
reference
plane
Figure 4.11: Concept of TRL calibration.
The TRL de-embedded results of the open switch are compared against the direct
measurement in Fig. 4.13. The narrow discontinuity near 3.5 GHz in the de-embedded
results is simply a gap in the valid data range associated with using only two “line”
standards, which does not impact the general trend observed. The de-embedded

64
Reflect
Thru
Line #1
Line #2
25mm
5mm
12.5mm
Figure 4.12: Custom TRL calibration standards.
results have a return loss much closer to 0 dB at higher frequencies, which is an
indication that the directly measured results are subject to a non-negligible amount
of power lost due to radiation and dissipation at the coax-to-microstrip transition.
The difference between the de-embedded and the directly measured insertion loss
of the closed switch is significant, as seen in Fig. 4.14. The insertion loss at 14 GHz
is adjusted from 1.7 dB to a respectable value of 0.7 dB after de-embedding. In fact,
the insertion loss is lower than 0.7 dB for the entire measured frequency range. The
de-embedded insertion loss is consistent with the simulated result for hair = 1µm,
and they match very closely up to 8 GHz, which suggests that the surface contact
between the slug and the microstrip equates to a very small air gap separation. The

65
0 5 10 15−50
−40
−30
−20
−10
Freq (GHz)
|S21
| & |S
12| (
dB)
0 5 10 15−2
−1.5
−1
−0.5
0
Freq (GHz)
|S11
| & |S
22| (
dB)
TRL de−embedded
TRL de−embedded
Direct measurement
Direct measurement
Simulation
Figure 4.13: Measured performance of the open switch (g = 2mm and Ls = 8mm),before and after de-embedding using TRL calibration.
oscillating ripples, found at higher frequencies in the directly measured results, have
been noticeably reduced after de-embedding.
It should be noted that the simulated and the de-embedded measured results for
the 6-mm long slug did not show the same consistency that the 8-mm long slug did.
This can largely be attributed to the adhesion issue of the coated copper on the diced
slug, similar to that experienced when attempting to fabricate microstrip lines on a
glass wafer. The copper film became slightly detached from the edges of the slug, as
shown in Fig. 4.15, which lifted the slug away from the microstrip in the assembled
switch and thereby increasing the air gap separation (hair). As mentioned before, this
issue may be mitigated by heating the cover slip during the sputter deposition.

66
0 5 10 15−2
−1.5
−1
−0.5
0
Freq (GHz)
|S21
| & |S
12| (
dB)
0 5 10 15−40
−30
−20
−10
Freq (GHz)
|S11
| & |S
22| (
dB)
TRL de−embeddedDirect measurement
TRL de−embedded
Simulation
Direct measurement
Simulation
Figure 4.14: Measured performance of the closed switch, before and after de-embedding using TRL calibration.
Figure 4.15: Copper-coated glass slugs showing film peeling at edges.

67
4.4 Pressure Measurement
The prototype device was tested for the minimum actuation pressure required to move
the slug, using the setup shown in Fig. 4.16. One end of a tube (3 mm inner diameter)
was bonded to the inlet port, the other end was connected to a y-piece splitter, which
allowed a pressure-regulated supply of nitrogen to be applied to the device, as well as
the pressure applied to be monitored simultaneously using a pressure gauge. It was
determined that a minimum pressure of approximately 4 kPa (0.6 psi) was required
to reliably move the slug. However, the actuation pressure used was subsequently
increased to 10 kPa (1.5 psi), to ensure positive and responsive slug motion. The
effects of device orientation on the slug activation pressure were also investigated. It
was found that the minimum operation pressure of 10 kPa was able to satisfactorily
move the slug with the device mounted either horizontally or vertically. It should
be noted that after a short burst of higher-pressure air (≈ 10 kPa) to move the slug
into the required position, a lower pressure supply (a few kPa) could then be used to
“hold” the slug in position.

68
From
pressure-regulated
nitrogen supply
Switch (layers clamped together)
Inlet ports
To
pressure gauge To
inlet port
Figure 4.16: Setup of pressure measurement.
4.5 Discussion
A summary of the de-embedded RF performance of the fabricated switch is tabulated
in Table 4.1. The results are comparable to some of the existing low-loss switches
[22]–[24]. Given the current dimensions of the switch and the physical displacement
of a slug associated with its switching mechanism, the switch can be a reliable and
low-loss option from low MHz to 20 GHz with reasonable power handling capability
and immunity to RF modulation. One limitation of the current design is that the
switching speeds are not as fast as other alternatives, which excludes it from high-
speed applications. Using multiple pneumatically controlled switches in a device such
as a reconfigurable antenna would require careful design to optimize the channel

69
network and pneumatic port layout. However, due to the channel network being on a
separate polymer layer, and there being no requirement for any electrostatic actuation
circuitry near the slug, the layout in the conducting layer is less restricted when using
pneumatic control. In order to realize a more complete solution for reconfigurable
devices in future research, pumps and valves — technologies that are commercially
available in the field of microfluidics — could be connected directly to the ends of the
channels, away from the RF devices. Such pneumatic components could then provide
the source of the actuation pressure gradient required for slug positioning and control,
as well as the means to address the individual switches in a network.
A thorough evaluation of any emerging RF switching technology includes a reli-
ability test that subjects the switch to millions of on-off cycles [22]. This is beyond
the scope of this project, but will serve to answer the questions of when the slug or
the channel wall will wear out and how the performance of the switch will deteriorate
over time with use. Since this switch is not intended for high-speed applications, the
number of switching cycles it will experience should be significantly smaller.
Table 4.1: Summary of de-embedded measured results.
Parameter At 5 GHz Up to 15 GHz
Insertion Loss (closed) 0.2 dB < 0.7 dBReturn Loss (closed) 24 dB > 15 dB
Isolation (open) 25 dB > 15 dB
As described in Section 4.1, the increase in capacitance in the closed state relies on
the overlapping between the slug and the microstrip, which may be prone to vibration.
Some kind of pressure locking mechanism may be required if the performance of the

70
switch is found to be noticeably influenced by vibration in likely application settings.
Also, a sizable overlapping area is crucial for realizing a reasonable capacitance. This
can be an issue for applications in which form factor cannot be compromised. But
for reconfigurable antennas, in which there are generally large expanses of conducting
layer to serve as radiating elements, this pneumatically controlled switch can easily be
integrated without increasing the antenna size. A circularly polarized antenna with
its sense of polarization controlled by pneumatic means is the focus of Chapters 5
and 6.

71
Chapter 5
Ring Slot Antenna with Switchable
Polarization
The concept of this reconfigurable antenna with switchable polarization using pneu-
matic control was inspired by the reconfigurable ring slot antenna demonstrated in
[1]. The theory behind the generation of circular polarization from a single microstrip
feed for the ring slot antenna is discussed in Section 2.4. Its particular structure and
implementation of PIN diodes lends itself to a relatively straightforward adaptation
of the sliding slug mechanism, as explained in this chapter.
The antenna structure and its operation of reconfigurable polarization states is de-
scribed, along with the simulation results to justify the selection of various dimensions
and its simulated performance. The design for two streams of fabrication process will
be presented. The first one involves using glass wafers as the antenna substrate and
SU8 photoresist as the channel layer, while the second one utilizes low-loss laminate
boards for the substrate and the channel layer. Both choices of process were intro-
duced in the fabrication of the switch, described in Section 4.1. The benefits and
drawbacks of each will be compared at end of this chapter. Substantial part of the
work in this chapter has been published in [59], [60], and [61].

72
5.1 Changing Polarization Using Pneumatic Control
In order to realize the pneumatic control, a multilayered structure, similar to the
capacitive switch described in Chapter 4, is required. Fig. 5.1 illustrates the various
layers of the proposed antenna. The channel in which the slugs reside, sits on top of
the ground plane. The channel is sealed with a cover layer on top. Holes are drilled
in the cover to create the ports for pressurized air. In contrast to the work published
in [1], in which two separate reconfigurable antennas were fabricated with each hav-
ing two possible polarization states as shown in Fig. 2.8, this proposed antenna has
all three polarization possibilities (LP/RHCP/LHCP). The respective port through
which pressurized air is applied to realize a particular state is indicated in Fig. 5.1.
The positions of the slugs leading to each polarization state are discussed below.
5.1.1 Linear Polarization
The top view of the antenna in LP mode is shown in Fig. 5.2 (the cover layer is
omitted). Pressurized air enters the channel from the port labeled “LP” in Fig. 5.1,
which aligns with the corresponding circle of the channel as seen in Fig. 5.2. Air flows
towards the other three exits (two ports in the cover layer and one gap in channel),
and in the process pushes each slug to one end of the chamber it resides in. The
narrow slotlines are not overlapped by the slugs, and therefore all four rectangular
openings are not bypassed. Linearly-polarized radiation oriented in the x-direction is
generated.
The small gap in the channel ensures that there is air flow into the right half of
the channel. Without the gap, air would likely escape the channel only through the
two ports.

73
Cover
tcover
Channel / Air
tchannel
Slugs
tslug
Port for
pressurized air
LP
RHCP
LHCP
Ground / Slot
tcopper
Substrate
tsub
Microstrip feed
tcopper
Figure 5.1: Structure of the switchable polarization ring slot antenna.
5.1.2 Right-Hand and Left-Hand Circular Polarizations
Similarly for RHCP, when pressurized air is applied to the corresponding port, the
slugs will be positioned as shown in Fig. 5.3. The phase relation between the two
diagonal modes leads to RHCP radiation leaving from the antenna in the +z-direction
(and LHCP radiation leaving from the antenna in the –z-direction). The case for
LHCP is illustrated in Fig. 5.4.
A ring slot antenna that uses pneumatic control would present the advantages
discussed in Chapter 3. A prototype of a practical antenna using this mechanism of

74
y
x
Copper-
plated slug
Channel
air out
LPair in
air out
Figure 5.2: Direction of air flow and the resulting positions of slugs for generatinglinear polarization.
reconfiguration would serve the purpose of demonstrating the feasibility of implement-
ing this scheme as an alternative to the existing methods of reconfiguration in other
reconfigurable antenna designs. With the reasons for implementing the pneumatic
control scheme justified, the other question to ask is: Why is the ring slot antenna
with rectangular openings chosen for demonstrating the viability of this scheme of
reconfiguration?
As hinted in Chapter 3, the mechanism of sliding dielectric slugs is well suited for
creating a distinct change in capacitance as in the case of RF switches. The capacitive
change originates from “macroscopic” movement of the slug as opposed to “micro-
scopic” movement of the cantilever in a MEMS switch or charges in a PIN diode.
The nature of this “macroscopic” movement contributes to increased uncertainty of

75
y
xCopper-
plated slug
Channel
0° -90°
air out
RHCPair in
air out
Figure 5.3: Direction of air flow and the resulting positions of slugs for generatingRHCP.
the realized capacitance values when compared to those achieved by the finer “mi-
croscopic” movement associated with MEMS switches and PIN didoes. Therefore, a
reconfigurable antenna structure that is less sensitive to capacitance values realized
by the switching mechanism should be selected for this project, which is currently
a proof of concept. The ring slot antenna with rectangular openings connected via
narrow slotlines is an ideal candidate. This is because ground current around the
ring can effectively bypass an opening, as long as a certain level of capacitance value
is achieved by the slug overlapping the two sides of the slotline. The absolute value
of the capacitance realized is not critical as far as antenna performance is concerned.
This particular attribute of this chosen antenna structure also helps reduce the influ-
ence on the behaviour of the antenna due to possible vibration of the slugs.

76
y
x
Copper-
plated slug
Channel
-90° 0°
air out
LHCPair in
air out
Figure 5.4: Direction of air flow and the resulting positions of slugs for generatingLHCP.
With the means of achieving reconfigurable polarization states serving as the pro-
logue to designing the antenna, the specific parameters required to fulfill the condition
for circular polarization — two linear orthogonal modes with equal magnitude and
90 phase separation — will be the focus of the rest of this chapter.
5.2 Design using glass wafers and photoresist
There are many sets of parameter values that could yield an antenna with acceptable
AR and impedance bandwidths for a specific range of operating frequency. These
parameters can mainly be divided into three groups: thicknesses, material permittiv-
ities, and lateral dimensions.

77
5.2.1 Dimensions
The thicknesses of the layers, as listed in Fig. 5.1, are given in Table 5.1. These values
are chosen mainly because of fabrication constraints and the materials available, as
mentioned in Chapter 4.
Table 5.1: Layer thickness of the ring slot antenna with glass substrate.
tsub (2 wafers) 1mm tcover (1 wafer) 0.5mmtchannel 0.2mm tslug 0.18mm (plus 5um)tcopper 5um
Similar to the thicknesses, material permittivities are dictated by the materials
chosen for the fabrication process. The relative permittivity of the SU8 photoresist,
which is used to construct the channel, is taken to be 2.89 with tanδ of 0.04 [62]. Each
fused-silica glass wafer (ǫr,sub = 3.78, tanδsub = 0.0004) has a thickness of 0.5 mm.
The substrate consists two stacked wafers, as the resulting overall thickness of 1 mm
dictates a reasonable microstrip width.
The lateral dimensions of various features can be designed properly to allow for
reconfigurable polarization operation of the antenna at the design frequency, which
is the 2.4 GHz range as in [1]. These dimensions are illustrated in Fig. 5.5. Some
parameters, such as the ring radius and the size of the openings, are more influential
than others, the channel wall width for instance. The radius of the ring, ro plays a
dominant role in deciding the resonant frequency of the antenna. The circumference
of the ring is generally one guided wavelength [1], [53].
Lateral dimensions that are more pertinent to impedance matching, namely the
slotline and microstrip stubs, are shown in Fig. 5.6. The resonant frequency of the

78
wchamberwslug
gring
wchannel
wwall
lslug
rport
gsl
y
x
ro
lopen
wopen
lchamber
gchannel
To coax
connector
Figure 5.5: Dimensions of the ring slot with glass substrate.
antenna sees a lesser degree of influence from these parameters, but they obviously
have a strong effect on how well the antenna is impedance matched and how deep the
resonance is. The width of the microstrip line (wms) can be determined analytically
to realize a Zo = 50Ω line given ǫr,sub and tsub.
With such a long list of parameters to be determined, different simulations were
set up in HFSS to progressively arrive at the final set of dimensions. The first sim-
ulation was a LP ring slot antenna without the rectangular openings, with lateral
dimensions similar to those in [1] but thicknesses and material permittivities specific

79
wms
wmitre
θstub,sl
θstub,ms
rstub,sl
rstub,ms
lsl
wsl
lms
Figure 5.6: Dimensions of microstrip-to-slotline transition with glass substrate.
to the fabrication process of this project. After a number of iterations and some
optimization, a tentative set of parameters related to impedance matching (shown in
Fig. 5.6) were determined. Next, the LHCP antenna in Fig. 2.12(a) was simulated to
determine the size of the rectangular openings, while tuning the impedance matching
parameters and ro for maximum AR bandwidth at the centre frequency of 2.4 GHz.
Further adjustments to these parameters were required to ensure the performance of
the RHCP antenna was comparable since the microstrip line and stub presented an
asymmetry to the structure.
Finally, the reconfigurable antenna in Fig. 5.5 was simulated, with the slugs,
channel, and cover in place. The HFSS simulation setup is illustrated in Fig. 5.7.

80
As with the switch simulations in Section 4.2, the microstrip line was excited with a
lumped port and radiation boundary was set up as the end limit of the simulation
domain to emulate the infinite extension to free space. To ensure the simulation
results would be realistic, the 4-inch-diameter glass substrate was included in the
setup, with the dielectric losses of the substrate, cover, and channel as well as the
metal losses of the microstrip and ground accounted for. In order to simplify the
simulation setup, the coax connection to the microstrip line was omitted. Observing
the comparison between directly measured and TRL de-embedded results in Fig. 4.14,
the effect of the coax-to-microstrip transition was not pronounced at low frequencies
near 2.4 GHz. Also, the air ports (drilled holes) on the cover layer for applying
pressurized air were not included.
Lumped
port
yx
z
85mm
Figure 5.7: Simulation model of the reconfigurable ring slot antenna with glass sub-strate in HFSS.

81
Table 5.2 lists the various parameters shown in Fig. 5.5 and Fig. 5.6 for the final
antenna design. As mentioned before, many parameters were obtained progressively
by simulating a linearly polarized antenna and a fixed circularly polarized antenna.
The ones associated with the channel were largely determined by fabrication con-
straints. The remaining parameters would be finalized by observing the results from
parametric sweeps, which will be discussed below. Note that wslug is slightly smaller
than wchamber to allow the slug to slide within its chamber smoothly while keeping its
direction of travel aligned to the length of the chamber.
Table 5.2: Dimensions of the ring slot antenna with glass substrate.
From Fig. 5.5 From Fig. 5.6
ro 15mm rstub,sl 4.75mmgring 2mm θstub,sl 140
wslug 3.75mm wsl 1.55mmlslug 6mm lsl 6.05mmwopen 3.27mm rstub,ms 5.5mmlopen 4.14mm θstub,ms 75
gsl 0.4mm wms 2.1mmwchamber wslug + 0.12mm lms 13.05mmlchamber 1.5lslug + lopen wmitre 2.344mmwwall 0.8mm
wchannel wchamber/2gchannel 1.5mmrport 1.5mm
5.2.2 Parametric Analysis
Some of the parameters that are considered crucial for the resonant frequency and the
AR performance of the reconfigurable antenna include: ro, gring, wslug, lslug, wopen,
and lopen.

82
A methodical approach to identify the optimal set of parameters would be to
set gring, wopen, and lopen to the values determined with the simulation of the fixed
circularly polarized antenna, and perform parametric analyses on ro, wslug, and lslug
to observe their effects on the resonant frequency and the AR performance. Trade-offs
between the parameters are discussed next.
It should be noted that a fourth parameter was included in the parametric anal-
yses. The thin air/dielectric gap between the coated copper layer on the slug and
the ground layer, denoted as hair in Section 4.2, will be present in the fabricated
antenna. It is this layer that makes the switching contact capacitive rather than
metal-to-metal. Similar to the switch simulations in Section 4.2, a few possible hair
values were swept in the antenna simulations to observe the effect of variation in the
air gap separation. From the simulation results of the switches in Section 4.2, the
effect on RF performance is negligible if the air gap is small (around 0.5 to 1 µm,
which is deemed reasonable for the fabricated antenna). The two values of hair used
in the parametric sweeps were 0.5 and 10 µm, with the intention to compare the
degree of performance between a realistic value and an outlying value.
Rather than simply presenting the results of the parametric sweeps, a prior discus-
sion on some of the expected trends and influences of the parameters would facilitate
the interpretation and understanding of the results.
The obvious effect of varying the radius of the ring slot, ro, is the shift in the
resonant frequency of the antenna, as mentioned in Section 5.2.1.
The area occupied by each slug (wslug · lslug) is directly proportional to the capaci-
tance enhancement when the slug bridges across the narrow slotline that connects the
rectangular opening and the ring slot. Much like the scenario of a simple parallel-plate

83
capacitor, the sensitivity of the capacitance is dominated by the air gap separation
as opposed to the slug area. Therefore, it can be expected that for a well-designed
antenna, its performance should not be overly sensitive to changes in the slug area.
However, a distinction needs to be made between varying the slug width (wslug) and
the slug length (lslug). From the geometry of the antenna in Fig. 5.5, it seems reason-
able to assume that increasing the length (lslug) of the slugs beyond the length of the
rectangular opening (lopen) would yield negligible effect on the current flow around
the ring slot. Varying wslug, on the other hand, would have multiple effects, besides
changing the slug area. This is because the length of the narrow slotline is pegged to
the slug width by design, and the length of the narrow slotline is one of the factors
that decides the length of current path around the ring slot (which ultimately affects
the resonant frequency and the AR performance).
Fig. 5.8 and Fig. 5.9 illustrate the minimum AR achieved in simulations and the
frequency at which it is obtained, respectively, over a range of wslug, lslug, and hair
while keeping ro at 15.5 mm. All other parameters were kept constant, as given in
Table 5.2. In general, it can be seen that a small minimum AR value in the range
of 0.1 to 0.2 can be reached in the vicinity of the design frequency of 2.4 GHz given
an appropriate combination of parameters. This remains true even when the air gap
separation is assumed to be unrealistically high (10 µm). This certainly provides
reassurance for the decision to select the ring slot antenna with rectangular openings
as the candidate for the reconfigurable antenna.
It is immediately obvious, from Fig. 5.8, that for the realistic air gap separation
of 0.5 µm, increasing the length of the slug from 4 mm to 10 mm has negligible effect
on the minimum AR achieved since the three curves overlap closely. This confirms

84
1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
Slug Width (mm)
Min
. AR
at B
road
side
(dB
)
lslug
=4mm, hair
=0.5um
lslug
=7mm, hair
=0.5um
lslug
=10mm, hair
=0.5um
lslug
=4mm, hair
=10um
lslug
=7mm, hair
=10um
lslug
=10mm, hair
=10um
Figure 5.8: Minimum AR achieved for various slug widths, slug lengths (lslug), andair gap separations (hair).
the hypothesis discussed earlier. The trend diverges when the separation is increased
to 10 µm. In this case, it is observed that a small minimum AR value can still be
reached when the slugs are longer (7 mm and 10 mm), though the corresponding slug
width at which the minimum AR is obtained is shifted. When hair is set at 10 µm,
the curve for lslug = 10 mm is the closest to the overlapping set of hair = 0.5 µm
curves. This can be explained by the fact that longer slugs help compensate for the
reduction in capacitance from the increased air gap separation.
The linear relationship observed in Fig. 5.9 between the slug width and the fre-
quency at which the minimum AR is obtained is a result of the length of the narrow
slotline being pegged to the width of the slug. The narrow slotline decides how far

85
1 2 3 4 5 62.2
2.25
2.3
2.35
2.4
2.45
2.5
Slug Width (mm)
Fre
quen
cy o
f Min
. AR
(G
Hz)
lslug
=4mm, hair
=0.5um
lslug
=7mm, hair
=0.5um
lslug
=10mm, hair
=0.5um
lslug
=4mm, hair
=10um
lslug
=7mm, hair
=10um
lslug
=10mm, hair
=10um
Figure 5.9: Frequency of minimum AR for various slug widths, slug lengths (lslug),and air gap separations (hair).
the rectangular opening is from the ring slot, and hence it directly dictates how much
further current has to flow around the ring and subsequently the resonant frequency.
The overlapping curves indicate that the resonant frequency is mostly independent
of the length of the slugs and the air gap separation.
The 3-dB AR bandwidth of the antenna under different scenarios, with ro =
15.5 mm, is shown in Fig. 5.10. The antenna achieves a bandwidth of over 4% for
slug width greater than 3 mm. This is similar to those (around 3.4% to 4.3%) obtained
by [1] and [53]. This particular antenna design has the potential of reaching over 5%
bandwidth if the slug width is increased beyond 3.5 mm.
The ring outer radius, ro, was the next parameter to be swept. Different values

86
1 2 3 4 5 62
2.5
3
3.5
4
4.5
5
5.5
6
Slug Width (mm)
AR
Ban
dwid
th a
t Bro
adsi
de (
%)
lslug
=4mm, hair
=0.5um
lslug
=7mm, hair
=0.5um
lslug
=10mm, hair=0.5um
lslug
=4mm, hair
=10um
lslug
=7mm, hair
=10um
lslug
=10mm, hair
=10um
Figure 5.10: AR bandwidth obtained for various slug widths, slug lengths (lslug), andair gap separations (hair).
of the slug width and the air gap separation were also compared. From Fig. 5.8, the
minimum AR was reached when wslug was in the range of 3 to 4 mm. This range of
values would therefore be used for this parametric sweep. Since the influence of the
slug length was determined to be diminishing for values greater than lopen, it was set
to 8 mm for the subsequent simulations.
Fig. 5.11 shows the minimum AR obtained when a range of ro was swept. For
both values of hair, it is apparent that increasing the slug width moves the curve to
the right. Imagine the following scenario: starting at hair = 0.5 µm, ro = 14.5 mm,
and wslug = 3 mm, a respectable minimum AR value of 0.26 dB is achieved, and an
optimal design is found. If wslug were to be increased to 3.5 mm, which would lead

87
to a deviation from the optimal design, the minimum AR obtained would increase
to 0.55 dB. In order to regain a lower minimum AR value, one has to trace the
wslug = 3.5 mm curve in the direction of increasing ro to the point where ro = 15 mm,
which gives a minimum AR value of 0.24 dB.
13.5 14 14.5 15 15.5 16 16.50
0.5
1
1.5
2
2.5
3
Ring Outer Radius (mm)
Min
. AR
at B
road
side
(dB
)
w
slug=3mm, h
air=0.5um
wslug
=3.5mm, hair
=0.5um
wslug
=4mm, hair
=0.5um
wslug
=3mm, hair
=10um
wslug
=3.5mm, hair
=10um
wslug
=4mm, hair
=10um
Figure 5.11: Minimum AR achieved for various ring outer radii, slug widths (wslug),and air gap separations (hair).
In essence, when the slug width is increased (within a small range), the ring radius
also needs to be increased to maintain a similar AR value. This is a demonstration
of the intricate component sizing required to fulfill the criteria for generating circular
polarization: equal magnitude and quadrature phase difference between two linear
orthogonal modes. It should be noted that this discussion does not consider the

88
deviation of the resonant frequency and the change in AR bandwidth. The frequency
at which the new minimum AR is realized would certainly be lower because of the
increase in the length of the narrow slotline and the ring radius.
Fig. 5.12 affirms the trends observed in Fig. 5.9 in two ways. For each particular
wslug value, the two curves for the two hair values overlap, which again indicates the
independence of the resonant frequency from the air gap separation. The wslug curves
are spaced equally apart for each 0.5-mm increment in wslug, exemplifying the linear
relationship between the slug width and the frequency at which the minimum AR is
obtained, as seen in Fig. 5.9. A linear relationship between the frequency at which
the minimum AR is obtained and the ring radius is also observed in Fig. 5.12.
13.5 14 14.5 15 15.5 16 16.52.2
2.25
2.3
2.35
2.4
2.45
2.5
2.55
2.6
Ring Outer Radius (mm)
Fre
quen
cy o
f Min
. AR
(G
Hz)
wslug
=3mm, hair
=0.5um
wslug
=3.5mm, hair
=0.5um
wslug
=4mm, hair
=0.5um
wslug
=3mm, hair
=10um
wslug
=3.5mm, hair
=10um
wslug
=4mm, hair
=10um
Figure 5.12: Frequency of minimum AR for various ring outer radii, slug widths(wslug), and air gap separations (hair).

89
Finally, the sweep of the small range of ro reveals that the AR bandwidths achieved
under different scenarios are fairly consistent, as shown in Fig. 5.13.
13.5 14 14.5 15 15.5 16 16.52
2.5
3
3.5
4
4.5
5
5.5
6
Ring Outer Radius (mm)
AR
Ban
dwid
th a
t Bro
adsi
de (
%)
wslug
=3mm, hair
=0.5um
wslug
=3.5mm, hair
=0.5um
wslug
=4mm, hair
=0.5um
wslug
=3mm, hair
=10um
wslug
=3.5mm, hair
=10um
wslug
=4mm, hair
=10um
Figure 5.13: AR bandwidth obtained for various ring outer radii, slug widths (wslug),and air gap separations (hair).
Tracing each curve in Fig. 5.8 until a minimum point is reached is essentially
optimizing the slug width for the lowest possible AR value when all other parameters
are fixed. This optimization process is at the expense of potentially deviating from
the design frequency and lower bandwidth. Referring to the plots from Fig. 5.8 to
Fig. 5.13 generated with parametric sweeps, the best compromise between a wide AR
bandwidth and a low minimum AR at the design frequency of 2.4 GHz was decided
with the following parameters: wslug = 3.75 mm, lslug = 6 mm, and ro = 15 mm.

90
5.2.3 Simulated Performance
The final antenna design with the parameters given in Table 5.2 was simulated for
the three polarization states: LP, RHCP, and LHCP. The air gap separation was set
at 1 µm.
2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8−25
−20
−15
−10
−5
0
Frequency (GHz)
|S11
| (dB
)
LPRHCPLHCP
Figure 5.14: |S11| of the simulated ring slot antenna (glass substrate) under differentpolarization states.
Impedance Matching (|S11|)
The impedance matching of the antenna is plotted in Fig. 5.14. The antenna is
impedance matched for all three states from 2.17 to 2.41 GHz. The capability of this
antenna to operate in all three polarization states was not demonstrated in [1] and

91
[53].
Figure 5.15: S11 (on the Smith Chart) of the simulated ring slot antenna (glasssubstrate) from 2 to 2.8 GHz under different polarization states.
Except for a small range of frequency where |S11| is slightly higher than −10 dB,
the impedance bandwidth of the antenna operating in circular polarization has a
wide impedance bandwidth, starting from 2.16 GHz and extending beyond 2.8 GHz.
This is the result of having the two resonances of the two orthogonal linear modes
being close to each other, causing the formation of a loop in the frequency sweep near
the centre of the Smith Chart (see Fig. 5.15). From Fig. 5.14, the two resonances
are located at roughly 2.31 GHz and 2.73 GHz. As mentioned in Section 5.1.1, the
LP state was realized with all four slugs positioned away from the narrow slotline.

92
Therefore, the rectangular openings are not bypassed and the current path around
the ring is increased, resulting in a lower resonant frequency. This is confirmed with
the antenna in the LP state having a resonant frequency coinciding with the lower
resonance of the circularly polarized antenna.
2.25 2.3 2.35 2.4 2.45 2.50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Frequency (GHz)
AR
(dB
)
RHCPLHCP
Figure 5.16: Broadside AR of the simulated ring slot antenna (glass substrate).
Axial Ratio (AR)
The AR of the simulated antenna at broadside (in the +z-direction) over a range
of frequency is shown in Fig. 5.16. The minimum AR achieved is lower than 0.7 dB
at about 2.36 GHz (RHCP) and 2.38 GHz (LHCP). The slight deviation in the AR

93
curve between the LHCP and RHCP cases (less than 20 MHz) can be attributed to
the asymmetric microstrip feedline. The 3-dB AR bandwidth is from 2.31 to 2.42 GHz
for RHCP and from 2.32 to 2.44 GHz for LHCP, which is about 5% when considering
2.38 GHz as the operating frequency.
−80 −60 −40 −20 0 20 40 60 800
1
2
3
4
5
6
7
8
9
10
θ (°)
AR
(dB
)
RHCP, φ = 0°
RHCP, φ = 90°
LHCP, φ = 0°
LHCP, φ = 90°
Figure 5.17: AR of the simulated ring slot antenna (glass substrate) in the twoprincipal planes at 2.38 GHz.
The AR on the two principal planes in both CP states at 2.38 GHz is given in
Fig. 5.17. The asymmetry in the curves about the z-axis (θ = 0) can again be
explained by the asymmetric feed structure. The performance is generally acceptable
(AR below 3 dB) for |θ| ≤ 30. Note that the RHCP performance is not as good as
that of LHCP because the frequency of minimum AR for the antenna operating in

94
the RHCP state is not at 2.38 GHz as in the case of the LHCP state, which is evident
in Fig. 5.16.
2 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.82
2.5
3
3.5
4
4.5
5
5.5
6
Frequency (GHz)
Gai
n (d
Bi)
LPRHCPLHCP
Figure 5.18: Broadside gain of the simulated ring slot antenna (glass substrate).
Antenna Gain and Radiation Pattern
The broadside gain of the antenna at 2.38 GHz in all three polarization states
reaches 5 dBi, as shown in Fig. 5.18. The antenna gain drops by less than 1 dB from
its maximum value within the impedance and AR bandwidths, which is respectable.
The radiation pattern in the RHCP state is illustrated in Fig. 5.19. A clarification
in terminology should be made here. RHCP radiation is as described in Section 2.1.1.

95
Figure 5.19: Simulated antenna pattern for φ = 0 and φ = 90 planes when operatingin the RHCP state at 2.38 GHz (glass substrate).

96
Figure 5.20: Simulated antenna pattern for φ = 0 and φ = 90 planes when operatingin the LHCP state at 2.38 GHz (glass substrate).

97
An antenna operating in the RHCP state is referring to a reconfigurable antenna that
is configured to produce pure RHCP radiation, ideally. In the context of this work
with a ring slot antenna, it is further specified as RHCP radiation in the +z-direction.
In reality, the antenna produces a small amount of cross-polarization — which in the
case of an antenna operating in the RHCP state — LHCP radiation. Therefore,
Fig. 5.19 shows both RHCP and LHCP radiation, and in the +z-direction (θ = 90),
RHCP radiation is significantly larger than LHCP radiation for this antenna operating
in the RHCP state, as expected.
The broadside gain is 5 dBi for RHCP wave traveling in the +z-direction. The
broadside cross-polarization level is –25 dB. As mentioned in Section 2.4, the reverse
CP wave (LHCP) is produced on the backside for a ring slot antenna, which is evident
in Fig. 5.19. The radiation pattern in the LHCP state is very similar to that in the
RHCP state, as shown in Fig. 5.20.
The radiation pattern in the LP state is noticeably different from those in the
CP states (see Fig. 5.21). Energy remains directed in the broadside direction, but
the backside sees the same dominating polarization as opposed to the case in the CP
states where the cross-polarization is dominant on the backside.
A summary of the simulated performance is presented in Table 5.3. Comparing
with Table 2.2, the simulated performance of the proposed antenna is similar to, if
not slightly better than, those of [1] and [53]. The key advantage of the proposed
antenna, as mentioned in Section 5.1, is its capability to achieve all three polarization
states.

98
Figure 5.21: Simulated antenna pattern for φ = 0 and φ = 90 planes when operatingin the LP state at 2.38 GHz (glass substrate).

99
Table 5.3: Simulated performance of the ring slot antenna using glass substrate.
Impedance bandwidth 2.17 to 2.41 GHz (10%)AR bandwidth (RHCP) 2.31 to 2.42 GHz (4.6%)AR bandwidth (LHCP) 2.32 to 2.44 GHz (5%)Minimum AR (RHCP) 0.67 dBMinimum AR (LHCP) 0.4 dB
Frequency of min. AR (RHCP) 2.36 GHzFrequency of min. AR (LHCP) 2.38 GHz
Broadside gain 5 dBiBroadside cross-pol. level < −25 dB
Ground Current
The cycle of the ground current at 2.38 GHz for each of the three states is presented
in “snapshots,” as shown in Fig. 5.22 to Fig. 5.24.
The resonant nature and the standing wave pattern in the LP state is clear in the
animation of the current distribution in Fig. 5.22. The animation shows a continuous
forward power transfer along the microstrip feedline to the ring slot, which confirms
the good impedance match at 2.38 GHz as indicated in Fig. 5.14.
The “hurricane”-like current distribution observed in Fig. 5.23 and Fig. 5.24 indi-
cates the generation of circularly polarized radiation of the antenna.
A prudent antenna design should include a sensitivity analysis as a result of fab-
rication tolerances. This is especially important for this particular project since a
custom fabrication process is used. The next section will discuss the results of the
sensitivity analysis of several parameters.

100
0°
90° 135°
45°
Figure 5.22: Ground current at different phases of a cycle in the LP state (glasssubstrate).

101
0°
90° 135°
45°
Figure 5.23: Ground current at different phases of a cycle in the RHCP state (glasssubstrate).

102
0°
90° 135°
45°
Figure 5.24: Ground current at different phases of a cycle in the LHCP state (glasssubstrate).

103
5.2.4 Sensitivity to Fabrication Tolerances
Given the nature of the custom fabrication process, fabrication tolerances require
greater attention compared to a standard proven manufacturing process. For this
process, three parameters that can potentially cause noticeable degradation to per-
formance are (referring to Fig. 5.25):
• the air gap separation between the copper-coated slugs and the ground — hair;
• the misalignment between the narrow slotlines on the ground and the slugs
(essentially between the ground wafer and the channel) — ∆xslug & ∆yslug; and
• the misalignment between the radial slot stub on the ground and the microstrip
feedline (essentially between the ground wafer and the microstrip wafer) —
∆xms & ∆yms.
Sensitivity analyses were performed in simulation to investigate the influence of
these parameters. From Fig. 5.14 and Fig. 5.16, it is observed that the performance
of the antenna operating in the RHCP state is not as good as that in the LHCP state.
Hence, the performance shown below is for the antenna operating in the RHCP state,
because it would serve as a more stringent test.
It was seen in Section 5.2.2 that an air gap separation of 10µm could cause a small
but noticeable change in the antenna performance. Also mentioned was that hair of
10 µm would be far too large. A realistic range for hair is ≈ 1 µm. While keeping
other parameters constant, the simulated AR, |S11|, and gain for this range of hair are
plotted in Fig. 5.26, along with the case of hair = 15 µm for comparison. Negligible
difference in the antenna performance was observed, with the exception of when hair
was increased to a very large value of 15 µm, which is beyond the clearance in the
channel.

104
∆yslug∆xslug
∆yms∆xms
hair
Ground
wafer
Microstrip
Channel
& slugs
Microstrip
wafer
Figure 5.25: Parameters considered in the sensitivity analysis.
The radiation pattern of the antenna when operating in the RHCP state, given
various air gap separations, is shown in Fig. 5.27. Only RHCP radiation is shown to
avoid overcrowding the plot. LHCP radiation, not shown here, looks very similar to
that shown in Fig. 5.19. The overlapping curves suggest that the radiation pattern,
especially in the +z-direction, is largely unaffected by varying hair. The radiation
patterns also see minimal change for the cases of misalignment discussed below.
In understanding the influence of the misalignment between the ground and the
slugs, a combination of ∆xslug and ∆yslug from –200 to 200 µm in steps of 50 µm

105
2.3 2.35 2.4 2.45
1
2
3
Frequency (GHz)
AR
(dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5−15
−12.5
−10
−7.5
Frequency (GHz)
|S11
| (dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.53
4
5
Frequency (GHz)
Gai
n (d
Bi)
hair
=0.5um
hair
=1um
hair
=5um
hair
=15um
Figure 5.26: Performance variation due to changing hair (glass substrate).
were used in simulations. With the alignment of the layers being performed under
a microscope, and considering the attainable precision of the alignment marks on
the SU8 layer, misalignment in the x- and the y-directions should remain below
200 µm. The performance degradation, as shown in Fig. 5.28, is not significant when
compared to the case of perfect alignment. The AR increases by no more than 0.2 dB
at 2.38 GHz for the worst cases of misalignment (∆xslug = ∆yslug = ±200µm), with
|S11| and gain almost unchanged. The greatest impact from the misalignment of the
slugs is the change in capacitance between the slugs and the narrow slotlines, which
would affect the purity of the circularly polarized radiation. This is confirmed with
the change in AR being slightly more noticeable than the change in |S11|.

106
hair = 0.5, 1, 5um
hair = 15um
Figure 5.27: Simulated antenna pattern for φ = 0 (solid lines) and φ = 90 (dashedlines) planes when operating in the RHCP state at 2.38 GHz, given different air gapseparations hair (glass substrate).

107
2.3 2.35 2.4 2.45
1
2
3
Frequency (GHz)
AR
(dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5−15
−12.5
−10
−7.5
Frequency (GHz)
|S11
| (dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.53
4
5
Frequency (GHz)
Gai
n (d
Bi)
Figure 5.28: Performance variation due to misalignment between the ground waferand the channel/slugs (glass substrate). The solid lines represent two combinationswith the largest misalignment (∆xslug = ∆yslug = ±200µm). The short dashed linerepresents the case of perfect alignment (∆xslug = ∆yslug = 0µm). The long dashedlines represent combinations of moderate misalignment.
The misalignment between the ground and the microstrip wafers was treated in a
similar fashion. However, due to the more precise alignment marks achievable with
the etched copper layers, the worst cases of misalignment were expected to be less
than 100 µm. Different combinations of misalignment in the x- and the y-directions,
in steps of 50 µm, were simulated, and the performance is shown in Fig. 5.29. Since
this particular misalignment would affect the microstrip feeding to the antenna, it is
obvious that the impedance matching sees slightly greater impact than the purity of

108
the circularly-polarized radiation. |S11| shifts slightly up by 0.5 dB at 2.38 GHz for
the worst cases of misalignment, while the AR and gain remain unaffected.
2.3 2.35 2.4 2.45
1
2
3
Frequency (GHz)
AR
(dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5−15
−12.5
−10
−7.5
Frequency (GHz)
|S11
| (dB
)
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.53
4
5
Frequency (GHz)
Gai
n (d
Bi)
Figure 5.29: Performance variation due to misalignment between the ground waferand the microstrip wafer (glass substrate). The solid lines represent two combinationswith the largest misalignment (∆xms = ∆yms = ±100µm). The short dashed linerepresents the case of perfect alignment (∆xms = ∆yms = 0µm). The long dashedlines represent combinations of moderate misalignment.
The sensitivity analyses above offered some reassurance in the inherent ability of
this antenna design to withstand some of the expected fabrication tolerances. Thus
far, a simple simulation model of the antenna was used for parametric sweeps and
sensitivity analyses with the aim of saving resources and time. It is important to

109
understand the extent of the change in performance when the fabricated antenna is
placed in a realistic environment during measurement. This is the subject of the next
section.
5.2.5 Modeling for Measurement of Fabricated Antenna
Performing antenna simulations offers antenna designers the opportunity to under-
stand the behaviour of their antennas and the potential pitfalls without committing
to the cost and time in physically building the antennas. However, the simulations
are only useful at predicting accurately the performance of the fabricated antennas
if they are set up properly with features closely resembling those of the antennas in
their measurement environments.
For this particular antenna design, migrating from the simple simulation model
to a more realistic measurement model requires adding the following features, which
are illustrated in Fig. 5.30:
• the microstrip-to-coax transition;
• the antenna holder (made from Lexan, a polycarbonate resin thermoplastic with
ǫr ≈ 3); and
• the alignment marks on the SU8, ground, and microstrip layers.
Each of the above features was first incorporated separately to observe its individ-
ual influence on the antenna performance. In the most realistic model of the antenna
shown in Fig. 5.30, all these features were included. No significant change in the
antenna and the radiation pattern was observed.
The change in AR is plotted in Fig. 5.31. The “Simple” curve represents the result
from the simple simulation model while the “Realistic” curve shows the result with

110
Antenna
holder
Coax connector
25.4mm
175mm
SU8 support posts
& alignment marks for
metal layers
25.4mm
Figure 5.30: Simulation setup for antenna measurement (glass substrate).
all the additional features included. It is obvious that the alignment marks alone
would have minimal effect on the purity of the circularly polarized radiation, since
the “Align. marks” curve overlaps the “Simple” curve. This is expected because
the alignment marks were designed to be small and intentionally placed away from
the ring slot. The presence of the antenna holder would up-shift the frequency of
minimum AR, while the coax-to-microstrip transition would increase the AR. The
combined effect of these features, represented by the realistic model, is a shift in the

111
frequency of minimum AR from 2.36 to 2.38 GHz and an increase of AR from 0.67
to 1.19 dB. The change in AR bandwidth is negligible.
2.3 2.35 2.4 2.450.5
1
1.5
2
2.5
3
3.5
Frequency (GHz)
AR
(dB
)
SimpleAlign. marksHolderCoax connect.Realistic
Figure 5.31: Comparison of various additional features in the simulation model onthe AR performance (glass substrate).
The effect of the additional features on |S11| is less, which is evident in Fig. 5.32.
|S11| actually improves slightly, lowering from –11.6 to –12.4 dB at 2.38 GHz.
This chapter, thus far, has documented the logical and thorough approach used
to design the reconfigurable ring slot antenna, with glass wafers as the substrate and
SU8 photoresist as the channel layer. The following section presents the design of the
antenna, with laminate boards replacing the glass wafers and the photoresist.

112
2.1 2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5−15
−12.5
−10
−7.5
Frequency (GHz)
|S11
| (dB
)
SimpleAlign. marksHolderCoax connect.Realistic
Figure 5.32: Comparison of various additional features in the simulation model onthe |S11| performance (glass substrate).
5.3 Design Using Laminate Boards
The theory behind the reconfigurable ring slot antenna with switchable polarization
remains the same when the glass wafers and the photoresist are replaced with low-
loss laminate boards (Rogers RO4350B hydrocarbon ceramic laminate, introduced in
Section 4.1). However, because laminate boards have greater physical and processing
flexibility than that of glass wafers, certain structural features are added and modified
to take advantage of this flexibility.

113
5.3.1 Structure
The layers of the antenna and the magnified plan view are shown in Fig. 5.33 and
Fig. 5.34, respectively. The RO4350B laminate board (ǫr = 3.66, tanδ = 0.004) is a
good candidate for replacing the fused-silica wafers because of their similar dielectric
constants, which facilitates the re-optimization of the antenna dimensions. The lam-
inate boards are available in several standard thicknesses, with 30 mil (0.762 mm)
being the closest option for replacing the 1-mm-thick glass substrate.
One noticeable difference between this alternative antenna structure and the al-
ternative structure of the switch described in Section 4.3 is that the combination of
SU8 photoresist (channel) and glass wafer (cover) is replaced with Rexolite plastic
and RO4350B laminate board. As shown in Fig. 4.6 and described in Section 3.3, the
brittle glass cover is susceptible to cracking and the SU8 photoresist is very difficult
to work with.
The combination of Rexolite plastic (ǫr = 2.53, tanδ = 0.0002) and laminate board
offers a better option from the perspective of handling and processing. Rexolite, which
is a cross-linked polystyrene plastic, is chosen because of its consistent permittivity
and low-loss characteristic over a wide range of frequency and its transparency for
allowing visual inspection of the movement of the slugs. The laminate board used
for the channel layer was stripped of the copper cladding on both sides before being
laser-machined.
The glass slugs, described in Sections 4.1 and 5.2, were also replaced with slugs
cut from a laminate board with copper on one side removed. The remaining copper
cladding on the other side of the laminate board did not have the adhesion issues
suffered by the copper-coated glass slugs (Fig. 4.15).

114
Cover tcoverRexolite
Ground & Microstrip tcopperCopper
Substrate tsubLaminate
Slugs tslugChannel tchannelLaminate
Side view
Figure 5.33: Various layers composing the ring slot antenna, with laminate substrate.
The additional features in the structure are the mounting screw holes at the
four corners and the centre screw hole, as shown in Fig. 5.33. As mentioned in
Section 4.3, the various layers of the switch were not bonded permanently during
measurement, but instead were clamped together to allow easy reconfiguration and
adjustments to the layer alignment and channel geometries. A more elegant way to
maintain this flexibility in assembling the antenna while avoiding the cumbersome
clamp (Fig. 4.9) is to hold the layers together with nylon screws, washers, and nuts.

115
ltab
y
x
l
wtab
rhole,cover
rhole,sub
To coax
connector
lsl
Figure 5.34: Magnified plan view of the ring slot antenna with laminate substrateand channel. Note that all four holes shown would be drilled through the cover layer.Only the centre hole would be drilled through the substrate as well.
The holes are strategically positioned away from the ring slot and the microstrip line
such that their influence on the EM behaviour of the antenna should be negligible.
This method of assembly is not feasible with the design using glass wafers because of
the risk of cracking the glass during hole drilling, screw tightening, and the limited
space available with the restrictive 4” wafer size. A larger wafer size (6”) could be
considered, but any device fabricated on a wafer of this size would be very fragile to
handle.

116
Another advantage, which is very important, is the introduction of the centre
screw. It allows for fine adjustment to the channel height and a means to control
the air gap separation (hair) between the slugs and the ground. With the glass
substrate design, the antenna layers would be held together at the edges by the
antenna holder, as shown in Fig. 5.30. The possibility of such adjustment after
assembling the layers together does not exist. Given the symmetry of the ring slot
and relatively insignificant presence of ground current at the centre of the structure
(as observed in Fig. 5.22, Fig. 5.23, and Fig. 5.24), the relatively small hole at the
centre is not expected to alter the EM behaviour of the antenna.
The thicknesses of the layers, as denoted in Fig. 5.33, are listed in Table 5.4.
The antenna was first optimized using a simple simulation model without the four
screw holes at the corners, the coax-to-microstrip transition, and the antenna holder.
Instead of performing the parametric sweep analysis as documented in Section 5.2.2, a
quicker approach was used — optimization with the initial starting dimensions being
those of the glass substrate design (listed in Table 5.2).
Table 5.4: Layer thickness of the ring slot antenna with laminate substrate.
tsub 0.762mm tcover 0.787mmtchannel 0.508mm tslug 0.422mm (plus 35um)tcopper 35um
The lateral dimensions of the optimized design are given in Table 5.4. Some of
the additional and modified features different from the glass substrate design are
specifically labelled in Fig. 5.34.
The dimensions obtained after optimization were then transferred to the realistic

117
Table 5.5: Dimensions of the ring slot antenna with laminate substrate.
ro 15.54mm rstub,sl 4.2mmgring 2mm θstub,sl 140
wslug 3.4mm wsl 1.59mmlslug 6mm lsl 7.35mmwopen 3.27mm rstub,ms 4.85mmlopen 4.14mm θstub,ms 75
gsl 0.4mm wms 1.6mmwchamber wslug + 0.12mm lms 13.05mmlchamber 1.5lslug + lopen wmitre 1.786mmwwall 0.8mm rhole,cover 1mm
wchannel wchamber/2 rhole,sub 1.25mmgchannel 1.5mm ltab 3mmrport 1.5mm wtab 2mm
model, as illustrated in Fig. 5.35, to assess the influence of the additional features
present in the fabricated antenna during measurement. Since the ring slot would be
patterned on the ground plane using either laser machining, milling, or photoetching,
as opposed to using the process of photolithography in the cleanroom, the shape of
the substrate is not restricted to circular and the size is not restricted to 4” or 6”.
As shown in Fig. 5.35, the substrate is square and it is larger than the glass wafers,
which allows the corner screw holes and the antenna holders to be further away from
the ring slot. The antenna holder was designed to accommodate a larger substrate
by expanding the distance between the arms.
5.3.2 Simulated Performance
The simulated antenna performance, for both the simple and realistic models, is given
in Fig. 5.36, Fig. 5.37, and Fig. 5.38.
From Fig. 5.36, it is evident that the additional features in the realistic model do

118
Coax
connector
Antenna
holder
Nylon screw
through hole
in substrate225mm
136mm
100mm
Figure 5.35: Simulation setup for antenna measurement (laminate substrate).
not have a significant effect on the return loss of the antenna, as in the case of the
glass substrate design. In fact, the impedance matching demonstrated in the realistic
model is slightly better than the simple model.
The discrepancies in performance are more noticeable with the AR and the gain.
As in the case of the glass substrate design, the frequency of minimum AR is shifted
up in the realistic model, which is evident in Fig. 5.37. However, the minimum
AR achieved remains similar if not slightly better for the realistic model. The AR
bandwidths shift accordingly. The appropriate operating frequency for this design
would be 2.43 GHz, compared to 2.38 GHz in the glass substrate design. However,
the minimum AR achieved remains similar, if not slightly better for the realistic
model.

119
2.1 2.2 2.3 2.4 2.5 2.6 2.7−25
−20
−15
−10
−5
0
Frequency (GHz)
|S11
| (dB
)
LP (simple)RHCP (simple)LHCP (simple)LP (realistic)RHCP (realistic)LHCP (realistic)
Figure 5.36: |S11| of the simulated ring slot antenna (laminate substrate) under dif-ferent polarization states, for both simple and realistic models.
The broadside gain of the antenna in all three polarization states, as plotted in
Fig. 5.38, is also similar to that of the glass substrate design. A gain reduction of
about 1 dB and a slight up-shift in the frequency of maximum gain is observed for
the realistic model. The coax-to-microstrip transition can be attributed as one of the
major causes of this gain reduction when comparing the simple model against the
realistic model. This is evident in the gain comparison in Fig. 5.39, which shows the
changes in gain due to the addition of the antenna holder and the addition of the
coax connector separately.

120
2.3 2.35 2.4 2.45 2.5 2.550
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Frequency (GHz)
AR
(dB
)
RHCP (simple)LHCP (simple)RHCP (realistic)LHCP (realistic)
Figure 5.37: Broadside AR of the simulated ring slot antenna (laminate substrate)over a range of frequency, for both simple and realistic models.
The simulated antenna radiation efficiency, using the realistic model, is 93.7%. As
mentioned in Section 2.1.2, radiation efficiency accounts for the dissipative losses of
the antenna (which are mainly conductor and dielectric losses in this case). The high
efficiency was expected because low-loss laminate was chosen as the substrate and the
copper thickness of 35 µm equated to over 25 skin depths at 2.4 GHz. This confirmed
the low-loss characteristics of this scheme of reconfigurable antenna as demonstrated
in the low insertion loss of the switch in Chapter 4.
The radiation pattern and the ground current of the antenna operating in the

121
2.1 2.2 2.3 2.4 2.5 2.6 2.72
2.5
3
3.5
4
4.5
5
5.5
6
Frequency (GHz)
Gai
n (d
Bi)
LP (simple)RHCP (simple)LHCP (simple)LP (realistic)RHCP (realistic)LHCP (realistic)
Figure 5.38: Broadside gain of the simulated ring slot antenna (laminate substrate)over a range of frequency, for both simple and realistic models.
RHCP state at 2.4 GHz are provided in Fig. 5.40 and Fig. 5.41, respectively.
A summary of the simulated antenna performance for the realistic model is given
in Table 5.6.
It should be noted that the antenna does suffer from the inability to align the
impedance bandwidth with the AR bandwidth, a goal which is very difficult to achieve
given the objective of attaining a reconfigurable antenna capable of all three polar-
ization states (as mentioned in Section 2.4). The limiting factors here are the upper
limit of the impedance bandwidth imposed by the LP state and the lower limit of the

122
2.1 2.2 2.3 2.4 2.5 2.6 2.72
2.5
3
3.5
4
4.5
5
5.5
6
Frequency (GHz)
Gai
n (d
Bi)
SimpleHolderCoax connect.Realistic
Figure 5.39: Comparison of various additional features in the simulation model ongain performance (laminate substrate) for the RHCP state.
AR bandwidth when operating in the LHCP state, as shown in Fig. 5.42.
The ideal scenario is to have the overall impedance bandwidth of the antenna
encompassing the overall AR bandwidth. When considering the antenna as a recon-
figurable antenna with only two polarization states — RHCP and LHCP without LP,
the performance is very respectable, since the impedance bandwidths of RHCP and
LHCP have very high upper limits that reach far beyond 2.7 GHz and encompass the
entire AR bandwidths. However, when the antenna is subject to the more stringent
bandwidth standard of a reconfigurable antenna capable of all three states — i.e.
the overall impedance bandwidth of the antenna is defined as the frequency band at

123
Figure 5.40: Simulated antenna pattern for φ = 0 and φ = 90 planes when operatingin the RHCP state at 2.4 GHz (laminate substrate).

124
Table 5.6: Simulated performance (realistic model) of the ring slot antenna usinglaminate substrate.
Impedance bandwidth 2.21 to 2.44 GHz (9.5%)AR bandwidth (RHCP) 2.37 to 2.49 GHz (4.9%)AR bandwidth (LHCP) 2.39 to 2.51 GHz (4.9%)Minimum AR (RHCP) 0.39 dBMinimum AR (LHCP) 0.67 dB
Frequency of min. AR (RHCP) 2.43 GHzFrequency of min. AR (LHCP) 2.45 GHz
Broadside gain 4.6 dBiBroadside cross-pol. level < −20 dB
Antenna radiation efficiency 93.7%
which |S11| remains below −10 dB regardless of the polarization state, it is clear that
this particular antenna cannot claim as great of a performance. In the strictest sense,
the simulated overall bandwidth of this reconfigurable antenna — capable of three
polarization states (LP/RHCP/LHCP) — is 39 MHz (2.394 to 2.433 GHz), which is
about 1.6%, as indicated in Fig. 5.42.

125
0°
90° 135°
45°
Figure 5.41: Ground current at different phases of a cycle in the RHCP state (laminatesubstrate).

126
2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 2.55 2.6 2.65−19
−16
−13
−10
−7
−4
|S11
| (dB
)
2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 2.55 2.6 2.650
1
2
3
4
5
AR
(dB
)Freq (GHz)
|S11|, LP|S11|, RHCP|S11|, LHCPAR, RHCPAR, LHCP
3−stateBW
Figure 5.42: Comparison of impedance and AR bandwidths (laminate substrate,realistic model).

127
5.4 Design Advantages and Disadvantages
With both substrate designs capable of producing reasonable simulated antenna per-
formance, it is important to evaluate their merits and drawbacks in terms of man-
ufacturability and ease of handling during assembly. The advantages of the design
using laminate boards include:
• Conventional materials, used in typical PCB designs, lead to greater predictabil-
ity of their mechanical behaviour during processing.
• With conventional materials, the overall cost of manufacturing should be less,
since Rexolite plastic and laminate boards are generally cheaper than glass
wafers and SU8 photoresist, and less effort is required in tweaking parameters
and steps of the fabrication process.
• Laminate is not brittle like glass, which makes it much easier to handle during
the assembly of the antenna. The antenna is also more robust as a result.
• Ground plane (antenna size) is not bounded by the standard 4” or 6 ” glass
wafer size.
• Channel thickness can be greater than 200 µm.
• Misalignment between the ring slot and microstrip is smaller and more pre-
dictable since the two layers are on the top and bottom sides of the same piece
of substrate instead of two separate glass wafers.
• Copper layers are thicker, and thus reducing metal loss.
• No copper adhesion issue.
• Alternative manufacturing methods, such as laser machining, screen printing,
photoetching, or milling, can be used depending on precision required and cost.
• Centre screw allows for fine adjustment to the channel height.

128
Despite the advantages listed above, there are some disadvantages associated with
this alternative design. They are as follows:
• The channel is patterned and then adhered to the cover, which increases the
possibility of distorting the shape of channel pattern.
• Quality of the channel wall depends strongly on the manufacturing method
chosen.
• The inherent variability in thickness and permittivity of the laminate boards
is larger than that of the glass wafers (reflected in the price difference between
the two materials).
The evaluation above shows that the design using laminate boards is more viable
and cost-effective when compared to using glass wafers. With the reconfigurable
antenna designed and its performance predicted using simulations, the fabrication
result using both materials is discussed in Chapter 6, along with a comparison between
simulated and measured performance of the antenna.

129
Chapter 6
Fabrication and Measurement of
Ring Slot Antenna
This chapter is divided into two parts. The first part documents the results of fab-
ricating the antenna using the glass and the laminate substrates. Some of the issues
encountered during fabrication are discussed. The setup used for testing the pneu-
matic control of the slugs and measuring the pressure required to move the slugs is
given. The second part provides a brief description of the antenna measurement setup
and an in-depth discussion on the measured results. The figures of merit — return
loss, AR, and gain — as well as the antenna patterns will be compared against the
simulated results in Chapter 5. Substantial part of the work in this chapter has been
published in [59], [60], and [61].
6.1 Fabrication
Referring to the evaluation in Section 5.4, using glass wafers as the substrate and
the cover layer offers greater accuracy at the expense of greater fabrication cost and
difficulty in handling. The fabrication results shown below offers convincing evidence
for the hypothesis.

130
6.1.1 Glass Wafers as Substrate
As mentioned in Section 4.1, the substrate, slugs, and covered channel can be coated
simultaneously without the requirement of building one layer on top of another. Each
of these components was fabricated by the author in AMIF.
SU8 photoresist was patterned on a glass wafer to create the channel on a cover,
which is the same process as described in Section 4.1. Fig. 6.1 illustrates the fragility
of the glass wafer and the recurring adhesion issue of the SU8 resist on glass. The
perimeter of the wafer, which was not supported by the cluster of square posts,
cracked during the dicing process. Some of the square posts drifted away from their
original positions due to delamination. Nevertheless, the precisely patterned channel
wall exhibited the advantage of the photolithography process.
Holes for
access ports
Broken
edges of
wafer
Diced edges
of waferPhotoresist
delamination
2mm
Figure 6.1: Fabricated channel layer on glass wafer.

131
The holes on the glass wafer, through which pressurized air would be applied, were
produced with laser machining instead of drilling (recall the poor result in Fig. 4.6).
No issue was experienced using laser machining because the stress on the glass wafer
associated with this manufacturing technique was minimal. The only disadvantage
compared to drilling is the longer time required to laser-machine holes through 0.5 mm
thick glass.
Copper with a thickness of 5 µm was deposited on a glass wafer using evaporation
deposition instead of sputtering deposition (refer to Section 4.3) with the intention
of improving the adhesion of copper on glass. Unfortunately, the effort proved to be
futile, as shown in Fig. 6.2, with the delamination of copper occurring after patterning
the ring slot on the layer.
5 µm of copper deposited on glass using evaporation or sputtering was relatively
thick for this technique and suffered from significant thermal stress (even with the
addition of titanium as adhesion layer in between copper and glass). Thinner copper
is not desirable because it would lead to greater metal loss due to the relatively
high skin depth at the frequency of interest (skin depth is 1.33 µm at 2.4 GHz).1
Electroplating is a promising alternative process for realizing thick layer of copper on
glass, which could be investigated in the future if the fabrication of the antenna using
glass substrate were to be explored further.
Although the process of photolithography yielded very precise patterns (precision
of 3 µm for copper), the complexity and the steps involved led to a number of issues
that could not be eliminated entirely, even with repeated trials. Compounded with
the inherent fragility of glass wafers, fabricating the antenna using a glass cover and
1Copper thickness of at least several multiples of skin depth is deemed necessary to keep metalloss of the antenna reasonably low.

132
Figure 6.2: Delamination of copper after etching.
substrate for 2.4 GHz operation was deemed nonviable. Handling 4” glass wafers
that are only 0.5 mm thick during antenna measurements would also likely lead to
more issues. For future work, scaling down the overall size of the antenna would be
the right way forward for this particular fabrication method, which would require
applying this technology at a higher frequency of operation.
In the next section, the antenna fabricated using laminate substrate, which was
predicted to be more viable and cost effective in Section 5.4, is presented.

133
6.1.2 Laminate Boards as Substrate
The fabricated antenna is shown in Fig. 6.3. The method of laser-scribing the out-
lines of the ring slot and the microstrip line on 35-µm-thick copper layers achieved a
precision within 10 µm, which is better than the precision by using photolithography
for this thickness of material. Such a high precision was more than adequate for this
antenna operating at 2.4 GHz.
RHCP port
LHCP port
LP port
slugs
Figure 6.3: Fabricated antenna with laminate substrate (ground plane side). Slugs,visible through the cover layer, are positioned for operating in the RHCP state. Withthe cover layer removed, inset shows the ground plane with the ring slot, slugs, andchannel.

134
The channel layer was also produced via laser machining. The precision was found
to be in the range of 30 µm. A small amount of lateral deformation in the shape of
the channel was observed, which was due to the thin structure of the channel. This
small deformation of the channel layer became negligible after the channel was aligned
and glued onto the ground plane. Referring to the result of the sensitivity analysis in
Fig. 5.28, the antenna performance of the device was expected to have a reasonable
tolerance to channel misalignment and discrepancy in patterning the channel.
Fig. 6.4 illustrates the backside of the antenna, on which the microstrip feedline
was patterned. The laminate substrate was thin enough to reveal the ring slot when
light was shone from the opposite side.
Figure 6.4: Fabricated antenna with laminate substrate (microstrip side). Light isbeing shone through the ring slot from the opposite side.
The profile of the channel was examined more closely under a calibrated optical
microscope, and the magnified view, shown in Fig. 6.5, demonstrates the accurate

135
transfer from the design pattern to the fabricated channel achieved by using laser
machining. The slugs were also cut from a laminate sheet using laser machining.
3.52mm
3.4mm0.8mm
Channel wall
SlugSlug
Channel wall
Figure 6.5: View under the microscope of a slug resting in the channel.
The three different combinations of slug positions for the three polarization states
are shown in Fig. 6.6, which are identical to those in Fig. 5.2, Fig. 5.3, and Fig. 5.4.
To clearly show the positions of the slugs, the cover layer was removed for illustration
purposes. When the various layers of the antenna were assembled together, the slugs
remained visible through the translucent cover layer, as seen in Fig. 6.3.
RHCP LHCP LP
Figure 6.6: Positions of slugs for different polarization states. The cover layer wasremoved.

136
In practice, the slugs would be moved into position by the pressure gradient gen-
erated from the application of pressurized air at the appropriate port. The pneumatic
actuation test is discussed in the next section.
6.1.3 Pneumatic Control and Pressure Measurement
Preliminary tests of the three-port device shown in Fig. 6.3 revealed an issue with the
hypothesized air flow described in Fig. 5.2, Fig. 5.3, and Fig. 5.4. In each scenario,
it was found that the two air-flow exits closer to the air-flow input port allowed too
much air to escape the channel. The remaining air flow inside the channel past the
two exits did not sustain enough pressure to move the two slugs further away from
the input port. Referring to Fig. 5.2 for the LP case, there was difficulty in reliably
moving the two slugs on the right side. In Fig. 5.3, it was the two slugs at the bottom
half of the channel.
A modification was made to the structure to resolve this issue, which did not affect
the electromagnetic behaviour of the antenna. A fourth port was added to the cover
layer, as shown in Fig. 6.7. 90 elbows and flexible pneumatic tubes were attached to
the top of the cover layer.
The influence of the pneumatic test setup (i.e. the port connectors and the tubes)
on the antenna performance was not expected to be significant because the compo-
nents were not of high permittivity and were not directly adjacent to the ground
plane. In future designs, the port connectors and the tubes will be replaced with
channels entirely embedded between the ground plane and the cover layer, such that
the connections to the pneumatic source will be away from the ring slot. This will
bring the influence of the pneumatic actuation setup on the antenna performance to

137
3
4
1
2
Actuation SequenceLP: i) 1&3, ii) 4LHCP: i) 2&4, ii) 3RHCP: i) 2&4, ii) 1
Additional
port
Figure 6.7: Setup for the pneumatic control test of the antenna and the actuationsequence of air inflow for each polarization state. Current slug positions correspondto the LHCP state.
a minimum.
Besides the physical modification to the antenna structure, the actuation was
changed from a one-step action to a two-step sequence, as illustrated in Fig. 6.8. This
increased the actuation time, but ensured the reliable control of the slug positions.
Since this scheme of reconfiguration is not designed for high-speed applications, as
mentioned in Section 4.5, the increase in the actuation time due to the extra step is
not considered a disadvantage. With the use of solenoid valves to control the source
of inflow, the actuation time could be decreased to under 500 ms.

138
LP
RHCP
LHCP
air in
air out
yx
1 2
1 2
1 2
(a)
(b)
(c)
(d)
Figure 6.8: Two-step sequence of air input and slug movement for realizing (a) LP,(b) LHCP, and (c) RHCP states. Slugs and chambers are highlighted for clarity. Thecover was removed (d) to clearly show the slug positions in each step of the sequenceto arrive at the RHCP state.

139
The pressure required to move the slugs was measured. The measurement setup
was similar to that shown in Fig. 4.16. It was found that the pressure required
was less than 2 kPa (0.3 psi) with the antenna placed horizontally (i.e. its plane
perpendicular to gravity). This was half of the pressure measured for the switch in
Section 4.4. The main reason for less pressure required for the antenna is the use of
the Rexolite cover and laminate slugs instead of a glass cover and slug. The stiction
between glass surfaces is higher and this was observed in the case of the switch with
glass cover and slug, when 4 kPa was required to move the slug.
The pneumatic control of the laminate-based antenna was deemed successful af-
ter the addition of the fourth port for air inflow and the change from a one-step
actuation to a two-step actuation. Section 6.2 documents the investigation of the
electromagnetic behaviour of the antenna and its measured performance.
6.2 Antenna Measurements
In order to evaluate the performance of the fabricated ring slot antenna and compare
it against the results obtained from simulations in Chapter 5, measurements were
performed inside an anechoic chamber. The anechoic chamber provides the necessary
environment to characterize an antenna under test (AUT) with minimal external in-
terfering signals and multipath errors. The antenna measurement setup is illustrated
in Fig. 6.9.
A standard-gain pyramidal-horn antenna (model 3160-03) by ETS Lindgren [10],
with its antenna gain known for its operating range from 1.7 GHz to 2.6 GHz, was
set up at one end of the chamber and aligned with the ring slot antenna (the AUT)
at the opposite end of the chamber. The two antennas were separated by a distance

140
Standard
Gain HornAntenna Under
Test (AUT)
Turntable
Absorbing Cones
Figure 6.9: Conceptual diagram of the antenna measurement setup inside the anechoicchamber.
of 3.1 m, which was sufficient to keep the antennas at a far-field distance of each
other. Fig. 6.10 shows the two antennas inside the chamber. Additional absorbing
material was attached to the arm of the turntable on which the AUT was mounted
to minimize the reflection and scattering of signals that could distort the measured
results.
Standard
Gain Horn
AUT (Ring Slot Antenna)
on Turntable
Figure 6.10: Standard gain horn and the ring slot antenna (AUT).
Since the turntable rotated in the azimuth direction only, in order to obtain the

141
antenna patterns in both φ = 0 and φ = 90 planes, remounting the AUT with
an orthogonal rotation was necessary, as depicted in Fig. 6.11. Detailed procedure
and description of the antenna measurements in the anechoic chamber is provided in
Appendix A.
x
y
x
yφ = 90°
φ = 0°
φ = 0°
φ = 90°
Figure 6.11: Setup of the ring slot antenna on the turntable for scanning φ = 0 (left)and φ = 90 (right) planes.
Since the goal of the antenna measurements was to evaluate the RF performance
of the antenna, the dynamic nature of reconfiguration (i.e. pneumatic actuation)
was not tested simultaneously during the antenna measurements in order to focus
on understanding the electromagnetic behaviour of the antenna. Therefore, the slugs
were temporarily secured in their designated positions for each state of configuration
(LP/RHCP/LHCP) during each measurement to ensure that none of them would
move out of position. An alternative setup, which would be a more realistic scenario,
is to supply a constant pneumatic pressure gradient (i.e. a constant stream of air flow
from the corresponding port) during each measurement. This is an area of future
work. Testing of the pneumatic control was performed separately and is presented in

142
Section 6.1.3.
6.2.1 Antenna Patterns
The measured antenna patterns (co-polarization and cross-polarization) for both φ =
0 and φ = 90 planes when the antenna was configured for the LP state are given
in Fig. 6.12. These are gain patterns and are given in the unit of dBi. The patterns
are a close match to the simulated patterns, except for the cross-polarization in the
φ = 90 plane. However, the cross-polarization level remains below –20 dB in almost
all directions in the φ = 90 plane, which is very respectable.
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=0° plane
θ (degrees)
Gai
n (d
Bi)
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=90° plane
θ (degrees)
Gai
n (d
Bi)
co−pol,sim.co−pol,meas.x−pol,sim.x−pol,meas.
Figure 6.12: Comparison between measured and simulated antenna patterns for φ =0 and φ = 90 planes when operating in the LP state at 2.4 GHz.
For obtaining the circular polarization patterns of the antenna when it was con-
figured for the RHCP or LHCP state, it was possible to use the same standard gain
horn in Fig. 6.10, which is linearly polarized. Ideally, for each CP pattern in a par-

143
ticular plane, a CP measurement is performed by using a standard antenna that can
generate a CP signal or by using a spinning dipole antenna. In this case, where only
a linearly polarized standard antenna was available, two separate linear polarization
measurements, with the horn oriented orthogonally in each measurement, were re-
quired to obtain one CP pattern. One set of the measured data was mathematically
phase-shifted by 90 before the two sets of measured results were either combined or
subtracted to obtain the RHCP or LHCP pattern, respectively [8]. Detailed steps
and derivation of this procedure are given in Appendix A.2.
When the antenna was configured to operate in the RHCP and LHCP states,
the measured patterns were consistent with the simulated patterns, as illustrated in
Fig. 6.13 (RHCP) and Fig. 6.14 (LHCP).
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=0° plane
θ (degrees)
Gai
n (d
Bi)
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=90° plane
θ (degrees)
Gai
n (d
Bi)
LHCP,sim.LHCP,meas.RHCP,sim.RHCP,meas.
Figure 6.13: Comparison between measured and simulated antenna patterns for φ =0 and φ = 90 planes when operating in the RHCP state at 2.4 GHz.
It should be noted that in Fig. 6.13 the measured LHCP pattern in the φ = 90

144
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=0° plane
θ (degrees)
Gai
n (d
Bi)
−20
−10
0
10
−60
120
−30
150
0
180
30
−150
60
−120
90 −90
φ=90° plane
θ (degrees)
Gai
n (d
Bi)
LHCP,sim.LHCP,meas.RHCP,sim.RHCP,meas.
Figure 6.14: Comparison between measured and simulated antenna patterns for φ =0 and φ = 90 planes when operating in the LHCP state at 2.4 GHz.
plane did deviate noticeably from the simulated pattern from θ = −90 to −60 and
from θ = −45 to 0. Also, the measured LHCP pattern in the φ = 90 plane from
θ = −150 to −90 in Fig. 6.14 also demonstrated noticeable deviation. Repeated
measurements confirmed that these deviations from the simulated patterns were not
the result of inconsistent measurements. These deviations were most likely caused by

145
the following:
• inherent measurement errors due to multipath signals in the asymmetric cham-
ber;
• the presence of the coax connector near the direct path between the horn an-
tenna and the AUT when the rotation of the turntable was around θ = −90
during the φ = 90 plane scan (see the right diagram in Fig. 6.11), which could
lead to unwanted scattering of signals; and
• the inherent characteristics of the antenna due to fabrication tolerances.
Nevertheless, the simulated gain values in that range of θ values were from −5 to
−20 dBi, where the accuracy of measurements was not expected to be as good as in
other regions. Overall, the measured patterns confirmed that the fabricated antenna
behaved as expected under different polarization states.
6.2.2 Return Loss (−|S11|)
The measured return loss of the antenna when operating in each polarization state
is compared against the simulated value in Fig. 6.15. The measured results were
quite consistent with those from simulations, except for the 2.5 to 3 dB discrepancy
beginning at 2.35 GHz for the CP states.
The phenomenon, which was not fully understood, could be attributed to the
soldering connection of the coax connector to the microstrip line, the surface con-
tact between the slugs and the ground plane, slight permittivity anisotropy in the
substrate, slight curvature in the substrate, or a combination of the aforementioned
factors. Different simulations were run to test these hypotheses, however, none pro-
duced return loss that would match up well with the measured results over the entire

146
2.1 2.2 2.3 2.4 2.5 2.6 2.7−25
−20
−15
−10
−5
0
Frequency (GHz)
|S11
| (dB
)
LP (meas.)RHCP (meas.)LHCP (meas.)LP (sim.)RHCP (sim.)LHCP (sim.)
Figure 6.15: Comparison between measured and simulated |S11| of the ring slot an-tenna under different polarization states.
frequency range. Nevertheless, |S11| for the CP states remained below or at −10 dB
above 2.24 GHz, which kept the measured impedance bandwidth of each polarization
state the same as the simulated bandwidth.
As mentioned in Section 6.1.3, the presence of the pneumatic port connectors
and tubes was expected to have an insignificant effect on the antenna performance.
Fig. 6.16, which shows the measured |S11| of the antenna with and without the pneu-
matic actuation setup, confirmed that the influence of these components was negligi-
ble. Note that these plots are slightly different from the measured |S11| in Fig. 6.15
because the coax connector had to be re-soldered onto the substrate due to a handling

147
error when connecting the cable during one of the antenna measurements.
2.1 2.2 2.3 2.4 2.5 2.6 2.7−25
−20
−15
−10
−5
0
Frequency (GHz)
|S11
| (dB
)
LP (without)RHCP (without)LHCP (without)LP (with)RHCP (with)LHCP (with)
Figure 6.16: Comparison between measured |S11| with and without pneumatic actu-ation setup.
6.2.3 Axial Ratio (AR)
The measured and simulated broadside AR for both CP states are given in Fig. 6.17.
The method of measurements and data analysis is described in greater detail in Ap-
pendix A.2.
Referring to Fig. 6.17 for the comparison with the simulated AR, the frequencies
at which the minimum AR were recorded shifted to the left by 20 MHz for the

148
2.3 2.35 2.4 2.45 2.5 2.550
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Frequency (GHz)
AR
(dB
)
RHCP (meas.)LHCP (meas.)RHCP (sim.)LHCP (sim.)
Figure 6.17: Comparison between measured and simulated broadside AR of the ringslot antenna under different polarization states.
RHCP state, and 10 MHz for the LHCP state. These shifts were less than 0.8% of
the operating frequency. Though the measured AR values did not reach as low as
in simulations, the 3-dB AR bandwidths were 5% for both CP states, which were
consistent with the simulated results in Table 5.6.
6.2.4 Gain
The measured broadside gain values in different polarization states are compared
against the simulated values in Fig. 6.18. The results show great consistency with
simulations, with discrepancy no more than 0.5 dB in almost the entire measured

149
range. It is also worth noting that the measured gain values were at their maxima
and remained mostly flat within the measured AR bandwidths (2.35 to 2.5 GHz).
2.1 2.2 2.3 2.4 2.5 2.6 2.72
2.5
3
3.5
4
4.5
5
Frequency (GHz)
Gai
n (d
Bi)
LP (meas.)RHCP (meas.)LHCP (meas.)LP (sim.)RHCP (sim.)LHCP (sim.)
Figure 6.18: Comparison between measured and simulated broadside gain of the ringslot antenna under different polarization states.
Finally, to verify the low-loss characteristic of the antenna, the radiation efficiency
was measured using the improved Wheeler Cap method [63], [64]. More details on the
measurement setup and procedure can be found in Appendix D. The measured radi-
ation efficiency was 92.1% at 2.4 GHz, which compares very well with the simulated
value of 93.7%.
Determining the phase centre of the antenna and its variation from one polar-
ization state to another is an interesting topic of future work. The location of the
antenna phase centre and its variation play an important role in high-precision GNSS

150
ranging applications and other engineering applications in the areas of imaging and
antenna arrays [65].
6.2.5 Performance Summary
A summary of the measured antenna performance, compared to the performance of
the realistic simulation model, is given in Table 6.1.
Table 6.1: Measured and simulated performance of the ring slot antenna.
Criteria Simulation Measurement
Impedance BW 2.21 to 2.44 GHz (9.5%) 2.24 to 2.45 GHz (8.8%)AR BW (RHCP) 2.37 to 2.49 GHz (4.9%) 2.35 to 2.47 GHz (5%)AR BW (LHCP) 2.39 to 2.51 GHz (4.9%) 2.385 to 2.505 GHz (5%)
Minimum AR (RHCP) 0.39 dB 0.65 dBMinimum AR (LHCP) 0.67 dB 1.25 dB
Freq. of Min. AR (RHCP) 2.43 GHz 2.41 GHzFreq. of Min. AR (LHCP) 2.45 GHz 2.44 GHz
Broadside Gain 4.6 dBi 4.8 (LP) / 4.4 (CP) dBiBroadside Cross-pol. level < −20 dB < −16 dB
Rad. Efficiency 93.7% 92.1%
The comparison between the impedance and AR bandwidths, similar to the sim-
ulated one made in Fig. 5.42, is provided in Fig. 6.19. The overall bandwidth of the
fabricated reconfigurable antenna, under the strictest definition of bandwidth (see
Section 2.4), is 58 MHz (2.386 to 2.444 GHz) or equivalently, 2.4% given the oper-
ating frequency of 2.4 GHz. This is larger than the simulated bandwidth of 1.6%
mentioned previously in Section 5.3.2.
Table 6.2 compares the measured performance of this antenna with the existing
antennas in literature described in Section 2.4. The existing antennas utilized PIN

151
−19
−16
−13
−10
−7
−4|S
11| (
dB)
2.15 2.2 2.25 2.3 2.35 2.4 2.45 2.5 2.55 2.6 2.650
1
2
3
4
5
AR
(dB
)
Freq (GHz)
|S11|, LP|S11|, RHCP|S11|, LHCPAR, RHCPAR, LHCP
3−stateBW
Figure 6.19: Comparison of measured impedance and AR bandwidths.
diodes, which are an established and commercially available technology.
In this work, a novel scheme of reconfiguration was implemented, and the mea-
sured antenna performance was similar, if not slightly better, when considering the
AR and overall three-state bandwidths. More importantly, the antenna developed in
this work was designed to switch between three polarization states, which increased
the realization challenge and the level of difficulty in attaining the respectable per-
formance. The two existing antennas capable of three or more polarization states
either had AR and impedance bandwidths that did not overlap, which resulted in a
0% three-state bandwidth [18], or required a thick air layer between conducting layers
to broaden its AR and impedance bandwidths in order to guarantee an overlap [19].
The antenna presented here attained a respectable 2.4% three-state bandwidth with

152
a reasonable device thickness of 2.1 mm.
Table 6.2: Comparison of antenna performance with similar reconfigurable antennasin literature.
Criteria [1] [53] [18] [19] This Work
# of pol. states 2 2 3 4 3Thickness2 0.8 mm 1.6 mm 1.6 mm 8.2 mm 2.1 mm|S11| BW 37.5% 20.9% 1.17% 13.1% 8.8%
AR BW (LH) 4.3% 4.2% 0.74% 4.5% 5%AR BW (RH) 3.4% 4.1% 0.72% 2.2% 5%Min. AR (LH) 0.5 dB 1.0 dB 0.9 dB 1.0 dB 1.25 dBMin. AR (RH) 1.2 dB 1.25 dB 0.5 dB 0.8 dB 0.65 dBOperating Freq. 2.38 GHz 2.63 GHz 2.45 GHz 2.45 GHz 2.42 GHzBroadside Gain 4 dBi 3.1 dBi 5.85 dBi 5.87 dBi 4.4 dBi3-state BW N/A N/A 0% 2.2% 2.4%
2Thickness accounts for the dielectric layers of the antenna structure and excludes support
structures such as measurement holders.

153
Chapter 7
Conclusion
Amongst the many options available to realize RF reconfigurable devices, the preva-
lent use of DC-controlled devices (varactor diodes, PIN diodes, FETs, and MEMS
switches) is a result of their ease of use, fast switching speed, and the vast number of
commercially available products. However, there are trade-offs in power handling ca-
pability, loss characteristics, and linearity. The main disadvantage of DC-controlled
devices is the increasing complexity in arranging the biasing structures associated
with an increasing number of devices used. Careful design is required as the bias-
ing structures compete with RF structures for limited area on the conducting layer.
Compromises in the RF functionality and performance are often necessary as the
metalized biasing structures do lead to a certain amount of loss through dissipation
and undesired radiation. It is for these reasons that there is continual exploration
on alternative schemes of reconfiguration — from the use of liquid metals, liquid
crystals, and high-permittivity mixtures, to the implementation of pneumatically ac-
tuated membranes. Each methodology boasts its own advantages and disadvantages,
and its selection over another is dependent on the application.
The scheme of reconfiguration using pneumatic control of solid dielectric slugs
was introduced in this work, which serves as an alternative to the aforementioned
schemes. The concept of this scheme is simple: a copper-backed dielectric slug, when

154
bridging over a narrow gap on the conducting layer of the substrate, provides the
necessary capacitive coupling required to effectively close the gap.
An evaluation of this technology is summarized below. The advantages are:
• Simple concept;
• Low loss, since low-loss materials (laminate boards) were used;
• Different materials and fabrication methods can potentially be adopted;
• Mass production possible;
• Good repeatability;
• High linearity and immunity to RF distortion due to the absence of semicon-
ductor materials;
• Absence of DC biasing structures, replaced by pneumatic actuation components.
This methodology does suffer from the following limitations:
• Slow switching speed (tens to hundreds of milliseconds), which excludes imple-
mentation in high-speed applications in its current form;
• Relatively large footprint of conducting layer required for capacitive coupling,
which makes this technology more suitable for reconfigurable antennas given
the large expanse of conductor already available;
• Integration of pneumatic components, which is more feasible for miniatur-
ized structures since commercially available micro-valves and pumps (see Ap-
pendix B) can be utilized.
• Requirement to secure the slugs against gravity and vibration, which is ad-
dressed in Section 7.2.2).
In this project, the scheme was brought from the concept stage to the significant
milestone of successfully fabricating two practical reconfigurable RF devices.

155
7.1 Contributions
1. A novel scheme of reconfiguration was introduced (Chapter 3) and successfully
demonstrated with the fabrication of a capacitive switch and an antenna with
switchable polarization. A review of the current landscape on the technologies
of reconfiguration was provided in Chapter 2 and how the scheme developed in
this project compares under different criteria was given in Section 4.5.
2. A custom process for patterning the pneumatic channel layer using SU8 pho-
toresist was developed by the author (Section 3.3 and Appendix C). Though the
antenna designed for applying this process on glass substrate was not successful,
the process developed will be useful for the miniaturization of future designs at
higher operating frequencies.
3. The capacitive switch described in Chapter 4, which offered the first physical
demonstration of the viability of pneumatic control for a reconfigurable RF
device, was presented in [56] and published in [57].
4. The design and fabrication of the reconfigurable ring slot antenna was presented
in [59] and [60], and resulted in an accepted journal publication [61]. The
measured performance of the antenna was comparable to some of the notable
designs found in literature, and the antenna showed better performance in AR
and three-state bandwidths, as summarized in Section 6.2.5. This work was
awarded second place in the Student Paper Competition in the 2014 IEEE
International Symposium on Antennas and Propagation in Memphis, USA [60].
5. This project has also led to two other conference presentations [66],[67].

156
7.2 Future Work
7.2.1 Further Characterization of Switching Mechanism
The main project goal of implementing this pneumatic slug control technology in a
practical RF device has been demonstrated. Additional characterization will be im-
portant for gaining greater understanding of this switching mechanism, as mentioned
in Section 4.5. It will offer a more comprehensive comparison against other existing
reconfiguration technologies, which can serve as a guide in determining the suitabil-
ity of this technology for a particular application. The following attributes will be
considered:
• Number of switching cycles before failure;
• Limits of operating temperature and the effects of thermal expansion;
• Power handling capability; and
• Precise profiling of the surface contact between the slug and the metal patch.
7.2.2 Slug Position Control
Securing the positions of the slugs after switching is a topic to be addressed in the
future development of this technology. This is important for enhancing the versatility
of a reconfigurable device since it may be subjected to physical movement and rota-
tion. Given the current dimensions of the reconfigurable antenna, the gravitational
force on a slug is much stronger than any electrostatic force associated with stiction.
When the antenna is not positioned with its plane perpendicular to the force
of gravity, one method of ensuring that the slugs remain in their positions is the
continued presence of pressure gradient (supply of pressurized air). As discussed in

157
Section 4.4, the holding pressure required is noticeably less than the actuation pres-
sure. However, an orthogonal pressure gradient is also required to keep the copper
side of a slug in contact with the copper ground plane to maintain capacitive cou-
pling.1 This may be achieved with the addition of a smaller air intake drilled on the
cover layer directly adjacent to the side of slug without copper, as shown in Fig. 7.1.
This, however, will require additional layers on top of the cover layer to direct air
flow. Design improvement will be needed to keep the structural complexity and the
profile of the device low.
Cover
Ground plane on
laminate substrate
Channel
Ring slot
Orthogonal
air intake
Air in
Air in
Air out
Slug
Figure 7.1: Introducing pressure gradient in the orthogonal direction.
7.2.3 A Complete System
The pneumatic control setup used in this project served well for the antenna pro-
totype, which was a proof of concept. A more elegant setup is to replace the ports
1This is not a concern when the antenna lies flat topside up since the slugs naturally rest on theground plane because of gravity.

158
and the tubes with embedded channels. The benefits will be twofold. The practical
antenna profile will be thinner without the 90 elbows and pneumatic tubes, and the
small amount of RF influence on the antenna performance from these components
will be eliminated. Section 3.1 alluded to the use of miniature pumps as the source of
pneumatic pressure, and a preliminary study is provided in Appendix B. The integra-
tion of miniature pumps and valves will be important for realizing a complete system.
Demonstrating a stand-alone device will be a significant milestone in furthering this
technology.
7.2.4 Miniaturization
Another future direction is the miniaturization of the technology and its application
in reconfigurable devices at higher frequencies. The benefits are several-fold:
• Smaller slugs inside a smaller channel (scaled accordingly) experience a differ-
ent combination of forces; stiction becomes more dominant compared to the
gravitational force. A continuous pressure gradient after switching may not be
required to hold the smaller slugs in position against gravity.
• The actuation pressure required to move the slugs may be lower, so the size and
capacity of the miniature pumps could possibly be reduced.
• Given the smaller size and potentially lower actuation pressure required, the
possibility of successfully integrating miniature pumps and valves that are com-
mercially available in the field of microfluidics is greater.
Associated with the potential benefits of miniaturization of the technology are new
obstacles in design and fabrication. Some of the anticipated issues and challenges are:
• Repeated switching will likely lead to a buildup of charge, and stiction in this

159
case will work against the intended operation of the device. Periodic adjustment
to the applied pressure for moving the slug may be necessary depending on the
time it takes for charges to naturally dissipate.
• A new characterization of the contact profile between the slug and the ground
plane, similar to the one performed during the design of the capacitive switch
in Chapter 4, will be necessary. It is not yet known whether the contact profile
will show similar repeatability when the size of the device shrinks.
• A different set of materials will likely be necessary. The standard thicknesses of
commercially available laminate boards become too restrictive during the design
process. The precision in thickness and the consistency in permittivity may also
become inadequate for designing smaller devices. Therefore, custom fabrication
will need to be explored again and the possibility of better fabrication results
is greater for small devices, as mentioned in Section 6.1.1.
• Greater precision in aligning the layers will be required while maintaining the
precision attained in constructing the channel (see Fig. 6.5). Combining the use
of laser machining to fabricate the channel and the use of a flip-chip bonder to
align the various layers presents a promising avenue to achieve the greater fab-
rication precision required for miniaturization. With the advent of 3D printing
technology and its trend of attainable greater precision and wider material se-
lection, it may someday offer a simpler alternative in fabricating pneumatically
controlled devices.
On the opposite note, the current fabrication process in combination with the use
of laminate boards can be readily adapted for antennas operating at lower frequen-
cies, namely, in the L1 or L2 band for applications in GPS (see Section 2.4). Most

160
components and features, such as the slugs and the ring slot, will be larger, which
eases the fabrication precision required.
7.2.5 Other Antenna Designs
The work performed on more complex channel configurations, described in Sec-
tion 3.4.2, can be expanded and integrated into the reconfigurable design of RF
devices. The concepts of channel blocking and multiple slugs in single channels can
lead to some interesting reconfigurable designs. In this thesis, the reconfiguration
of an antenna in the aspect of changing polarization has been demonstrated. An-
other aspect, such as frequency agility, could be explored. This concept has been
applied to a frequency switchable dielectric resonator antenna by another student in
this research group [68], in which an antenna prototype was fabricated and measured
without any pneumatic control test. Besides slot antennas and dielectric resonator
antennas, microstrip antennas and reflectarray elements are also good candidates for
serving as platforms to implement this reconfigurable scheme.
This thesis will be concluded with the introduction of an aperture coupled patch
antenna capable of switching its operating frequency from 3 GHz to 5 GHz, which
is currently being developed by the author. Its structure is shown in Fig. 7.2. The
width (14.57 mm) and the length (28 mm) of the patch provide the resonant condi-
tions for the upper and lower frequencies, respectively. The frequency switching is
achieved by selectively exciting one dimension of the patch. The swinging arm, which
is pneumatically actuated as shown in Fig. 7.3, is coated with copper on the bottom
side. At a given state (operating at 3 GHz or 5 GHz), the arm covers one of the two
slots, such that the energy can be coupled from the microstrip feedline to the patch

161
via the other slot. The multiple layers are aligned using precision dowels through
tight-fitting alignment holes, such that performing the alignment under a microscope
is no longer necessary. The analysis and performance evaluation of this antenna will
be published in the future, and will serve to further demonstrate the versatility of
this scheme of reconfiguration.
Slots
Swinging
arm
Patch
Air ports
Substrate
- ground (top)
- microstrip (bottom)
Channel
Cover 14.57mm
28mm
Figure 7.2: Exploded view of the frequency-switchable aperture-coupled antenna witha pneumatically controlled swinging arm.

162
UF
LF
Microstrip
Patch
Air in
Air out
Air port
UF
Nylon
screw
and nut
Channel
(a) (b)
Figure 7.3: Operation of the frequency-reconfigurable antenna. (a) With the coverlayer removed, this top view shows the position of the swinging arm and the directionof air flow for operation in upper frequency (UF) and lower frequency (LF). (b) Planview of all features on all layers. The microstrip feedline is situated on the bottomside of the substrate, whereas the patch is on the top side of the cover.

163
Bibliography
[1] M. K. Fries, M. Gran, and R. Vahldieck, “A reconfigurable slot antenna with
switchable polarization,” IEEE Microw. Wireless Compon. Lett., vol. 13, no. 11,
pp. 490–492, Nov. 2003.
[2] F. Yang and Y. Rahmat-Samii, “A reconfigurable patch antenna using switchable
slots for circular polarization diversity,” IEEE Microw. Wireless Compon. Lett.,
vol. 12, no. 3, pp. 96–98, Mar. 2002.
[3] Y. J. Sung, T. U. Jang, and Y. S. Kim, “A reconfigurable microstrip antenna for
switchable polarization,” IEEE Microw. Wireless Compon. Lett., vol. 14, no. 11,
pp. 534–536, Nov. 2004.
[4] B. Y. Toh, R. Cahill, and V. F. Fusco, “Understanding and measuring circular
polarization,” IEEE Trans. Education, vol. 46, no. 3, pp. 313–318, Aug. 2003.
[5] J. L. Volakis, Antenna Engineering Handbook, 4th ed. McGraw-Hill, 2007.
[6] D. Manandhar and R. Shibasaki, “Possibility analysis of polarization diver-
sity scheme for multipath mitigation in GPS receivers,” in Proc. Int. Symp.
GNSS/GPS, Dec. 2004.
[7] M. A. Kossel, R. Kung, H. Benedickter, and W. Biichtokd, “An active tagging
system using circular-polarization modulation,” IEEE Trans. Microw. Theory

164
Tech., vol. 47, no. 12, pp. 2242–2248, Dec. 1999.
[8] T. A. Milligan, Modern Antenna Design, 2nd ed. Wiley, 2005, ch. 1.
[9] W. L. Stutzman and G. A. Thiele, Antenna Theory and Design, 2nd ed. Wiley,
1998.
[10] Model 3160 Series Pyramidal Horn Antenna: User Manual, ETS-Lindgren, 2011.
[11] Y.-C. Huang and K.-H. Lin, “A study of the thickness sensitivity of the
anisotropic-slab LP to CP by using the inverse circular polarization ratio,” in
Proc. IEEE Antennas and Propagation Society Int. Symp., Jun. 2003.
[12] C. E. Alissandrakis, “Magnetic field diagnostics in the low corona from microwave
circular polarization inversion,” in Proc. Nobeyama Symp., Oct. 1998.
[13] R. Garg, P. Bhartia, I. Bahl, and A. Ittipiboon, Microstrip Antenna Design
Handbook. Artech House, 2001.
[14] C. A. Balanis, Antenna Theory: Analysis and Design, 3rd ed. Wiley-
Interscience, 2005, ch. 14.
[15] K.-F. Tong and J. Huang, “New proximity coupled feeding method for recon-
figurable circularly polarized microstrip ring antennas,” IEEE Trans. Antennas
and Propagat., vol. 56, no. 7, pp. 1860–1866, Jul. 2008.
[16] W.-S. Yoon et al., “Crossed dipole antenna with switchable circular polarisation
sense,” Electron. Lett., vol. 45, no. 14, pp. 717–718, Jul. 2009.
[17] D. H. Schaubert, F. G. Farrar, A. Sindoris, and S. T. Hayes, “Microstrip antennas
with frequency agility and polarization diversity,” IEEE Trans. Antennas and
Propagat., vol. 29, no. 1, pp. 118–123, Jan. 1981.
[18] B. Kim et al., “A novel single-feed circular microstrip antenna with reconfigurable
polarization capability,” IEEE Trans. Antennas and Propagat., vol. 56, no. 3, pp.

165
630–638, Mar. 2008.
[19] R.-H. Chen and J.-S. Row, “Single-fed microstrip patch antenna with switchable
polarization,” IEEE Trans. Antennas and Propagat., vol. 56, no. 4, pp. 922–926,
Apr. 2008.
[20] Y. Dong and T. Itoh, “Substrate integrated composite right-/left-handed leaky-
wave structure for polarization-flexible antenna application,” IEEE Trans. An-
tennas and Propagat., vol. 60, no. 2, pp. 760–771, Feb. 2012.
[21] J.-S. Row and C.-J. Shih, “Polarization-diversity ring slot antenna with frequency
agility,” IEEE Trans. Antennas and Propagat., vol. 60, no. 8, pp. 3953–3957,
Aug. 2012.
[22] G. M. Rebeiz, RF MEMS: Theory, Design, and Technology, 1st ed. Wiley, 2003.
[23] Agilent Technologies, “Understanding RF/microwave solid state switches and
their applications,” App. Note: 5989-7618EN, May 2010.
[24] P. Hindle, “The state of RF and microwave switches,” Microwave Journal,
vol. 53, no. 11, pp. 20–36, Nov. 2010.
[25] C. D. Patel and G. M. Rebeiz, “RF MEMS metal-contact switches with mN-
contact and restoring forces and low process sensitivity,” IEEE Trans. Microw.
Theory and Tech., vol. 59, no. 5, pp. 1230–1237, May 2011.
[26] M. Li and N. Behdad, “A technique for designing liquid-tunable RF lenses,” in
Proc. IEEE Antennas and Propagation Society Int. Symp., Jul. 2010.
[27] C.-H. Chen and D. Peroulis, “Liquid RF MEMS wideband reflective and absorp-
tive switches,” IEEE Trans. Microw. Theory Tech., vol. 55, no. 12, pp. 2919–
2929, Dec. 2007.
[28] Y. Damgaci and B. A. Cetiner, “A frequency reconfigurable antenna based on

166
digital microfluidics,” Lab Chip, no. 13, pp. 2883–2887, May 2013.
[29] C. Karcher, V. Kocourek, and D. Schulze, “Experimental investigations of elec-
tromagnetic instabilities of free surfaces in a liquid metal drop,” in Int. Sci.
Colloquium Modelling for Electromagnetic Processing, Mar. 2003.
[30] R. R. Romanofsky, “Advances in scanning reflectarray antennas based on fer-
roelectric thin-film phase shifters for deep-space communications,” Proc. IEEE,
vol. 95, no. 10, pp. 1968–1975, Oct. 2007.
[31] A. Moessinger, C. Fritzsch, S. Bildik, and R. Jakoby, “Compact tunable Ka-band
phase shifter based on liquid crystals,” in IEEE MTT-S Int. Microwave Symp.
(IMS) Digest, May. 2010.
[32] S. Bulja, D. Mirsheka-Syahkal, R. James, S. E. Day, and F. A. Fernandez, “Mea-
surement of dielectric properties of nematic liquid crystals at millimeter wave-
length,” IEEE Trans. Microw. Theory and Tech., vol. 58, no. 12, pp. 3493–3501,
Dec. 2010.
[33] M. G. Wong, “Piezoelectrically actuated liquid metal switch,” U.S. Patent US
6 756 551, Jun. 29, 2004.
[34] T.-H. Lin, S. Paul, S. Lu, and H. Lu, “A study on the performance and reliabil-
ity of magnetostatic actuated RF MEMS switches,” Microelectronics Reliability,
vol. 49, no. 1, pp. 59–65, Jan. 2009.
[35] R. G. Polcawich et al., “Surface micromachined microelectromechancial ohmic
series switch using thin-film piezoelectric actuators,” IEEE Trans. Microw. The-
ory and Tech., vol. 55, no. 12, pp. 2642–2654, Dec. 2007.
[36] G. H. Huff and S. Goldberger, “A coaxial stub microfluidic impedance trans-
former (COSMIX),” IEEE Microw. Wireless Compon. Lett., vol. 20, no. 3, pp.

167
154–156, Mar. 2010.
[37] S. A. Long and G. H. Huff, “Experiments on a fluidic loading mechanism for
beam-steering reflectarrays,” in Proc. IEEE Int. Conf. Wireless Information
Technology and Systems, Aug. 2010.
[38] L. Yang, L. J. Martin, D. Staiculescu, C. P. Wong, and M. M. Tentzeris, “Con-
formal magnetic composite RFID for wearable RF and bio-monitoring applica-
tions,” IEEE Trans. Microw. Theory and Tech., vol. 56, no. 12, pp. 3223–3230,
Dec. 2008.
[39] G. J. Hayes, Y. Liu, M. D. Dickey, and G. Lazzi, “Light-responsive, heat-
activated, reconfigurable microstrip structures,” in IEEE Int. Symp. Antennas
and Propagation and URSI National Radio, Jul. 2012.
[40] J.-H. So et al., “Reversibly deformable and mechanically tunable fluidic anten-
nas,” Adv. Funct. Mater., vol. 19, no. 22, pp. 3632–3637, Nov. 2009.
[41] G. J. Hayes, J.-H. So, A. Qusba, M. D. Dickey, and G. Lazzi, “Flexible liq-
uid metal alloy (EGaIn) microstrip patch antenna,” IEEE Trans. Antennas and
Propagat., vol. 60, no. 5, pp. 2151–2156, May 2012.
[42] M. Jobs, K. Hjort, A. Rydberg, and Z. Wu, “A tunable spherical cap microfluidic
electrically small antenna,” Small, vol. 9, no. 19, pp. 3230–3234, Apr. 2013.
[43] W. S. T. Rowe and X. Tang, “Pneumatically switched microwave and antenna
structures,” in Proc. European Microwave Integrated Circuits Conference (Eu-
MIC), Oct. 2013, pp. 480–483.
[44] C. M. Shah et al., “Elastomer-based pneumatic switch for radio frequency mi-
crodevices,” J. Microelectromech. S., vol. 21, no. 6, pp. 1410–1417, Dec. 2012.
[45] N. J. Farcich, J. Salonen, and P. M. Asbeck, “Single-length method used to

168
determine the dielectric constant of polydimethylsiloxane,” IEEE Trans. Microw.
Theory and Tech., vol. 56, no. 12, pp. 2963–2971, Dec. 2008.
[46] S. P. Lacour, J. Jones, S. Wagner, T. Li, and Z. Suo, “Stretchable interconnects
for elastic electronic surfaces,” Proc. IEEE, vol. 93, no. 8, pp. 1459–1467, Aug.
2005.
[47] S.-W. Qu, C. H. Chan, and Q. Xue, “Wideband and high-gain composite cavity-
backed crossed triangular bowtie dipoles for circularly polarized radiation,” IEEE
Trans. Antennas and Propagat., vol. 58, no. 10, pp. 3157–3164, Oct. 2010.
[48] A. K. Bhattacharyya and L. Shafai, “A wider band microstrip antenna for cir-
cular polarization,” IEEE Trans. Antennas and Propagat., vol. 36, no. 2, pp.
157–163, Feb. 1988.
[49] R. L. Li, J. Laskar, and M. M. Tentzeris, “Wideband probe-fed circularly po-
larised circular loop antenna,” Electron. Lett., vol. 41, no. 18, pp. 997–999, Sep.
2005.
[50] T. Sudha, T. S. Vedavathy, and N. Bhat, “Wideband single-fed circularly po-
larised patch antenna,” Electron. Lett., vol. 40, no. 11, pp. 648–649, May 2004.
[51] R. L. Li, N. A. Bushyager, J. Laskar, and M. M. Tentzeris, “Determination
of reactance loading for circularly polarized circular loop antennas with a uni-
form traveling-wave current distribution,” IEEE Trans. Antennas and Propagat.,
vol. 53, no. 12, pp. 3920–3929, Dec. 2005.
[52] M. K. Fries and R. Vahldieck, “Uniplanar circularly polarized slot-ring antenna
architectures,” Radio Sci., vol. 38, no. 2, Nov. 2002.
[53] Y.-J. Kim, J.-K. Kim, J.-H. Kim, and H.-M. Lee, “Reconfigurable annular ring
slot antenna with circular polarization diversity,” Asia Pacific Microwave Con-

169
ference (APMC 2007), Dec. 2007.
[54] M. M. Zinieris, R. Sloan, and L. E. Davis, “A broadband microstrip-slotline
transition,” Microwave and Optical Technology Letters, vol. 18, no. 5, pp. 339–
342, Aug. 1998.
[55] National Archives & Rec. Admin., Code of Federal Regulations Title 47, Telecom-
munications, Parts 0-19, Revised Oct. 1, 2009. U.S. Govt. Printing Office, 2010.
[56] B. Wu, M. Okoniewski, and C. Hayden, “Design and fabrication of pneumati-
cally controlled capacitive switches,” in Proc. European Microwave Conference
(EuMC), Oct. 2013, pp. 424–427.
[57] ——, “A pneumatically controlled capacitive switch,” Microwave and Optical
Technology Letters, vol. 56, no. 2, pp. 489–493, Feb. 2014.
[58] P. Colestock and M. Foley, “A generalized TRL algorithm for s-parameter de-
embedding,” Fermi National Accelerator Laboratory Tech. Memo: TM-1781,
Apr. 1993.
[59] B. Wu, M. Okoniewski, and C. Hayden, “Comparing the simulated and measured
results of a pneumatically controlled antenna,” in Proc. Int. Conf. Microwave,
Radar and Wireless Comm. (MIKON), Jun. 2014.
[60] ——, “Reconfigurable ring slot antenna with polarization diversity using pneu-
matic control,” in Proc. IEEE Antennas and Propagation Society Int. Symp.,
Jul. 2014.
[61] ——, “A pneumatically controlled reconfigurable antenna with three states of
polarization,” IEEE Trans. Antennas and Propagat., 2014, accepted.
[62] A. Ghannam, C. Viallon, D. Bourrier, and T. Parra, “Dielectric microwave char-
acterization of the SU-8 thick resin used in an above IC process,” in Proc. Eu-

170
ropean Microwave Conference, Sep. 2009.
[63] R. H. Johnston and J. G. McRory, “An improved small antenna radiation-
efficiency measurement method,” IEEE Antennas and Propagation Magazine,
vol. 40, no. 5, pp. 40–48, Oct. 1998.
[64] R. H. Johnston, “Efficiency simulations on a Vivaldi antenna in a Wheeler Cap,”
in Proc. IEEE Antennas and Propagation Society Int. Symp., Jun. 2009.
[65] W. Kunysz, “Antenna phase center effects and measurements in GNSS ranging
applications,” in Proc. Antenna Tech. Applied Electromag. Int. Symp. & Amer-
ican Electromag. Conf. (ANTEM-AMEREM), Jul. 2010.
[66] B. Wu and M. Okoniewski, “A novel scheme for realizing a microstrip antenna
with switchable circular polarization,” in Proc. Eur. Conf. Antennas and Prop-
agat. (EuCAP), Mar. 2012, pp. 3278–3282.
[67] B. Wu, T. Apperley, M. Okoniewski, and C. Hayden, “Reconfigurable antenna
designs using micro-pneumatic control of dielectric slugs,” in Proc. Int. Conf.
Microwave, Radar and Wireless Comm. (MIKON), May 2012, pp. 69–72.
[68] T. Apperley and M. Okoniewski, “An air gap based frequency switching method
for the dielectric resonator antenna,” IEEE Antennas and Wireless Propagat.
Letters, vol. 13, no. 1, pp. 455–458, 2014.
[69] A. Sutinjo, R. H. Johnston, and M. Okoniewski, “Improved efficiency measure-
ment and analysis methods using an overmoded Wheeler Cap,” in Proc. IEEE
Antennas and Propagation Society Int. Symp., Jul. 2010.

171
Appendix A
Antenna Measurements in
Anechoic Chamber
The antenna being characterized, also known as the antenna under test (AUT), was
measured in the anechoic chamber in the ICT Building at the University of Calgary.
The basic chamber setup is shown in Fig. 6.9 and described in Section 6.2. There
are a number of methods for measuring the gain of the AUT. The more common
types require either a standard-gain antenna with a known gain, a pair of antennas
with unknown gains (in addition to the AUT), or near-field/far-field transformation
[14]. The measurement method selected in this project requires a standard-gain
antenna with a known gain, and the procedure is described below. As long as the
gain of the standard-gain antenna is known over the frequency band of interest, the
measurement method of using a standard-gain antenna is preferred because of its
simplicity. Section A.1 describes how this measurement method makes use of the
Friis transmission equation to determine the gain and obtain the antenna patterns
when the AUT is a linearly polarized antenna. Section A.2 then expands the method
to perform circular polarization measurements.

172
A.1 Linear Polarization Measurements
Generally, the gain of a linearly polarized antenna, unless specified, implies the con-
dition of maximum polarization match — i.e. a hypothetical test antenna used to
measure the antenna is oriented in line with the polarization direction of the antenna
for maximum field reception.
To find the broadside gain of the AUT, the Friis transmission equation is used.
One form of the Friis transmission equation is given as [9]:
Pr
Pt
= εGtGr
(
λo
4πR
)2
(A.1)
where Pr is the power accepted by the receiving antenna, Pt is the power delivered to
the transmitting antenna, Pr/Pt is the power ratio, Gr is the maximum gain of the
receiving antenna, Gt is the maximum gain of the transmitting antenna, λo is the free-
space wavelength, R is the distance between the antennas, and ε is the efficiency factor
(0 < ε < 1), which accounts for the polarization and impedance mismatches between
the antennas. For this project, the transmitting antenna is the standard-gain horn
while the receiving antenna is the AUT, although reversing the roles of the antennas
leads to the same result (theoretically). Also, for both the standard-gain horn and
the AUT, the maximum gain direction is in the broadside direction, therefore, the
antennas are aligned facing each other for the calculation of the broadside gain of the
AUT. The broadside gain of the standard-gain horn from 1.7 GHz to 2.6 GHz can be
obtained from the user manual [10].
To perform a valid gain measurement, the antennas must be in the far-field region
of each other. At a particular frequency, an antenna has an associated Fraunhofer

173
distance — 2D2/λo — beyond which any object is considered to be located in the
antenna’s far field region [9]. D is the maximum dimension of the antenna or, max-
imum dimension of the aperture in the case of an aperture antenna. If one antenna
is placed within the Fraunhofer distance of the other antenna (i.e. the separation
distance is not large enough), the presence of reactive field may be significant enough
to affect the accuracy of the measured results. For this project, the associated Fraun-
hofer distances for both the standard-gain horn and the AUT are smaller than their
separation distance, implying that the chamber size is adequate to satisfy the far-field
requirement for gain measurements.
The vector network analyzer (VNA) is an RF instrument used for measuring the
power transmitted and received by the antennas. The individual powers Pr and Pt
are not measured directly. Instead, the power ratio Pr/Pt is provided by the square of
the magnitude of the forward transmission coefficient |S21|2. It is important to ensure
that the antennas are not separated too far. This is because the free-space path loss(
4πRλo
)2should not be large enough to bring |S21| below the noise floor of the VNA.
Rearranging Eq. A.1, the broadside gain of the AUT can be isolated:
Gr = |S21|2(
1
εGt
)(
4πR
λo
)2
. (A.2)
Since the polarization alignment between the standard-gain horn and the AUT
can be quite accurate, the impedance mismatches of the antennas are expected to
play a greater role in the efficiency factor ε dropping below the maximum value of 1.
Impedance mismatches lead to reflected powers at both antennas, which are captured
by the VNA as reflection coefficients |S11| and |S22| (|S11| for the standard-gain horn
and |S22| for the AUT if the horn is connected to port 1 of the VNA and the AUT to

174
port 2). Therefore, the efficiency factor is estimated as:
ε = (1− |S11|2)(1− |S22|2). (A.3)
Therefore, the broadside gain of the AUT is:
Gr =|S21|2
(1− |S11|2)(1− |S22|2)
(
1
Gt
)(
4πR
λo
)2
. (A.4)
The antenna co-polarization pattern is obtained by rotating the turntable on which
the AUT is positioned for one full cycle (360) and recording the power ratio |S21|2
at each angle (at increments of 1). The pattern is first normalized to the power
ratio at broadside (which is maximum), then the actual gain value at each direction
(−180 < θ ≤ 180) is obtained by multiplying the pattern with the broadside gain
value calculated from Eq. A.4. The broadside gain and the antenna pattern are
usually given in dBi instead of numeric value.
To obtain the cross-polarization pattern, the standard-gain horn needs to be ro-
tated by 90 before running the measurement with the turntable rotation. The power
ratios measured should be significantly lower than those in the co-polarization mea-
surement. The obtained pattern is normalized to the power ratio at broadside from
the co-polarization measurement and then multiplied with the broadside gain value
calculated from Eq. A.4.
A.2 Circular Polarization Measurements
This section describes how the results from two LP measurements are combined with
post-measurement processing to give the gain and patterns of the circularly polarized

175
AUT.
A.2.1 Derivation
The key behind this method is the fact that the two orthogonal CP unit vectors can
each be expressed in terms of two orthogonal linear components [8]:
R =1√2(X− jY) =
1√2(H− jV) (A.5)
L =1√2(X+ jY) =
1√2(H+ jV). (A.6)
Eq. A.5 and Eq. A.6 show that the linear components are not restricted to the
standard unit vectors X and Y in the Cartesian coordinates. As shown in Fig. A.1,
a general pair of orthogonal linear unit vectors, denoted as H and V, can be rotated
by any angle as long as they remain in the plane orthogonal to Z (the direction of
field propagation). Although the angle between H and X (or similarly, V and Y) can
be arbitrary, the order between H and V needs to be consistent with the standard
(positive) orientation of the Cartesian coordinate system (given a particular direction
of Z).
Any electric field vector can be expressed in terms of its linear or circular compo-
nents:
~E = EHH+ EV V
= ERR+ ELL. (A.7)

176
Figure A.1: Generalization of two orthogonal linear components.
The right-hand circular component of any electric field vector can be found using
[8]:
ER = ~E • R∗
= (EHH+ EV V) • 1√2(H− jV)∗
=1√2(EH + jEV ) (A.8)
where R∗represents the complex conjugate of R and EH , EV , ER, EL are all complex
magnitudes. Similarly, the left-hand circular component of an electric field vector in
terms of its linear components is:
EL = ~E • L∗
=1√2(EH − jEV ). (A.9)
From Eq. A.8 and Eq. A.9, it can be seen that the circular components can be

177
obtained by combining or subtracting the linear components phased-shifted by 90.
Recall from Section A.1 that the individual transmitted and received powers are
not measured directly. Therefore, the electric field components should be expressed
in terms of power ratios. Using Eq. A.8, the electric field ratio Er,R/Et — the ratio
of the right-hand circular component of the received electric field to the transmitted
electric field — can be found:
Er,R =1√2(EH + jEV )
Er,R
Et
=1√2
(
EH
Et
+ jEV
Et
)
S21,R =1√2(S21,H + jS21,V ) (A.10)
where S21,H and S21,V are both complex and represent the values directly measured
by the VNA. S21,H is measured when the standard-gain horn is oriented for maximum
polarization match with the EH component of the AUT while S21,V is measured when
the horn is oriented for maximum polarization match with the EV component of the
AUT. S21,L, similarly, is given as:
S21,L =Er,L
Et
=1√2(S21,H − jS21,V ). (A.11)
Given S21,R and S21,L, Eq. A.4 can then be employed to calculate the RHCP and
LHCP gains of any CP antenna.
The axial ratio (AR) can be calculated by [8]:

178
AR =
|Er,R|+|Er,L|
|Er,R|−|Er,L|=
|S21,R|+|S21,L|
|S21,R|−|S21,L|, for RHCP antenna
|Er,L|+|Er,R|
|Er,L|−|Er,R|=
|S21,L|+|S21,R|
|S21,L|−|S21,R|, for LHCP antenna.
(A.12)
A.2.2 Procedure
As described above, a pair of LP orthogonal field components, EH and EV , phase-
shifted apart by 90 can be combined or subtracted to produce the RHCP or LHCP
component, respectively. Since the signal sought is CP, the two LP components do
not need to be aligned with the Cartesian coordinate axes (i.e. X and Y) used for
referencing the plane of the AUT. In fact, given a perfect measurement environment,
the CP patterns obtained are theoretically independent of the angle of rotation of
the LP components as long as the two components remain orthogonal to each other.
In reality, the anechoic chamber at the University of Calgary is far from a perfect
measurement environment. Asymmetry of the chamber, various scatterers (broken
tips of the absorbing cones, the arm of the turntable, etc.), multipath signals, errors
in alignment between the standard gain horn and the AUT, and other factors all play
a role in affecting the quality of the measured results.
The polarization direction of the electric field of the standard gain horn indicated
the direction of the particular LP component of the AUT being measured. To measure
EH and EV (technically, S21,H and S21,V in Eq. A.10 and Eq. A.11 are the quantities
provided by the VNA), two measurements were needed with the horn remounted
orthogonally between measurements.
The procedure for measuring the circularly polarized AUT using LP antenna mea-
surements is given below. To scan the two principal planes (φ = 0 and φ = 90) of

179
the AUT, four LP measurements were required, as shown in Fig. A.2.
1. Mount the AUT on the turntable for scanning the φ = 0 plane of the AUT.
2. Mount the standard gain horn with the shorter edge parallel to the floor of the
chamber. Rotate the horn about its aperture centre to the desired angle of horn
rotation to measure EV of the AUT (Fig. A.2(a)).
3. Align the aperture centre of the horn with the centre of the AUT.
4. Perform antenna measurement with turntable rotation to scan the φ = 0 plane.
5. Remount the horn with the longer edge parallel to the floor of the chamber.
Rotate the horn about its aperture centre to the same angle to measure EH of
the AUT (Fig. A.2(b)).
6. Repeat steps 3 and 4.
7. Remount the AUT for scanning the φ = 90 plane. Keep the horn setup the
same for measuring EH of the AUT (Fig. A.2(d)).
8. Repeat step 3.
9. Perform antenna measurement with turntable rotation to scan the φ = 90
plane.
10. Repeat step 2 (Fig. A.2(c)).
11. Repeat steps 8 and 9.

180
x
y
EV
x
y
x
yEH
EV
EH
x
y
AUT AUT
AUTAUT
Horn Horn
Horn Horn
(a) (b)
(c) (d)
Figure A.2: Linearly polarized antenna measurements required for obtaining CP pat-terns of the AUT in φ = 0 (top diagrams) and φ = 90 (bottom diagrams) planes.A negative angle of horn rotation is shown.

181
Appendix B
Miniature Pumps
The system for creating the pressure gradient inside the channel is beyond the scope
of this thesis. However, some preliminary investigation was performed and miniature
pumps appear to be the most suitable candidate. The technology is well established
in the field of microfluidics, and miniature pumps of various sizes and capacities are
available. Some commercially available pumps are tabulated in Table B.1.
The flow rate indicated is the maximum free flow rate for water. The channels
designed in this thesis are generally less than 3.5 mm wide and 500 µm high. A
slug can be readily moved with the makeshift system of applying pressurized air
from a can of gas duster. The actual flow rate or pressure threshold required to
initiate movement in the slug depends on a number of factors, such as the size of
the slug, the number of slugs inside the channel, and material selection. The power
consumption is for the duration when the pump is on. Ideally the pump will only
be turned on when a change in state is required; therefore the power consumption of
the switching mechanism is minimal. This is unless a holding pressure is required to
keep the slug(s) in position after switching. Given the size of these pumps, especially
the larger ones, implementing an array of antennas in which one pump generates the
pressure gradient in multiple channels to different antenna elements would illustrate
a practical and efficient use of this technology of pneumatic control.

182
Table B.1: Specifications of some commercially available miniature pumps.
Pump Dim
ensions(m
m3)
Weight(g)
Flow
Rate
(mL/min)
PowerConsu
mption
(W)
Bartels mp51 3.5× 14× 14 0.8 5 0.2Bartels mp61 3.8× 15× 30 2 7 0.2TCS M2002 14× 14× 28 11 700 1.89TCS M4002 25× 26× 41 33 2800 6TCS M5002 30× 32× 62 70 4500 121 TCS Micropumps Ltd.www.micropumps.co.uk
2 Bartels Mikrotechnik GmbH.www.bartels-mikrotechnik.de

183
Appendix C
Photolithography Process of
SU8-2100
This appendix documents the detailed procedure for processing the SU8-2100 pho-
toresist in AMIF, which was developed and refined by the author during the course
of this project. The process flow is given in Fig. C.1.
Substrate
Pretreat
Rinse &
DryCoat Soft Bake Expose
Post
Exposure
Bake
Develop
Figure C.1: SU8-2100 process.
C.1 Initial Preparation
• Turn on nitrogen supply and vacuum pump.
• Set up programmable hot plate away from dump rinser but not beyond 3/4
point of wet deck lengthwise, and away from the back of wet deck by 13 cm.
Turn on hotplate with switch at the back.

184
• If necessary use an IPA soaked wipe and/or N2 gun to clean hot plate surface
and aluminum plate.
• Level hot plate on top of 4 adjustable legs with spirit level (legs and level on
top right of labware shelf).
• Place aluminum plate (diameter: 41/8”, thickness: 0.5 mm) on top of hot plate
as heat sink.
• Set programmable hot plate for soft bake (do NOT start) (program #4):
– Room temperature to 30C at 300C/hr
– 30C to 65C at 240C/hr
– Stay at 65C for 7 mins
– 65C to 95C at 240C/hr
– Stay at 95C for 40 mins
– 95C to room temperature at 240C/hr
• Set programmable hot plate for PEB (do NOT start) (program #5):
– Room temperature to 30C at 240C/hr
– 30C to 65C at 200C/hr
– Stay at 65C for 5 min
– 65C to 95C at 200C/hr
– Stay at 95C for 14 mins
– 95C to room temperature at 200C/hr
• Set spinner program (program #14):
– Spread1: 500rpm, 7s, 80rpm/s
– Spread2: 900rpm, 3s, 150rpm/s
– Spin: 1850rpm, 45s, 250rpm/s

185
– Slow: 0rpm, 8s, 200rpm/s
• Follow Mask Aligner document and set mask aligner parameters to:
– Exp. time: 95s
– Exp. type: Prox
– WEC type: Cont
– WEC: 50 um
– Al. gap: 120 um
– Exp. gap: 120 um
• Wear nitrile gloves. Clean mask with IPA and dry with nitrogen. Clean with
cold piranha solution if necessary (refer to piranha preparation document; wear
face shield, chemical apron, and trionic gloves).
• Insert mask in mask aligner.
C.2 Substrate Pretreat
• Piranha-clean wafer if necessary (refer to piranha preparation document).
• Rinse wafer with DI water and nitrogen-dry.
• For depositing resist directly on glass wafer, apply HMDS on wafer in oven.
Allow wafer to cool after. Skip next step.
• For depositing resist on copper-plated wafer, place wafer on hot plate for 5 min-
utes at 150C (see Initial Preparation). Allow wafer to cool to room temperature
on wipe-covered aluminum plate.

186
C.3 Coat
• Clean spinner chamber with acetone-soaked wipes.
• Run a dummy spin program using a dummy wafer.
• Place wafer on vacuum chuck and check centering.
• Select spinner program (see Initial Preparation).
• Open SU8 bottle; use a pipette to transfer some Remover PG onto a wipe and
carefully wipe the lip and top of SU8 bottle.
• Static-pour 5 mL of SU8 (try to avoid bubbles on wafer). CRITICAL STEP!
– Aim for a spot 2.5 cm off centre, have a small amount of resist out of
bottle first before SLOWLY moving across centre of wafer. Do not reverse
pouring motion (otherwise bubbles will appear).
– Twist bottle while reducing resist flow. Always better to have MORE
resist than less. Use wipe to cut off drip near edge of wafer.
– Ensure no film formed at the neck of the bottle prior to storage. Use
pipette to pop film.
• Close spinner lid; wait 2 minutes. The settled resist should cover an area of at
least 4 to 5 cm in diameter. Start program.
• Use a pipette to soak wipes with Remove PG and carefully wipe off streaks
of resist from edge and bottom of wafer. Use dry wipe to wipe away excess
Remove PG. May use cotton buds instead of wipes.
• Transfer wafer to programmable hot plate and place it on top of aluminum
plate. Wait 5min to allow resist to level (do NOT start program yet).
• Clean spinner chamber with Remover PG-soaked wipes thoroughly. Dispose
wipes and eventually, gloves in dedicated SU8 waste bin.

187
• Clean all surfaces (also vacuum wand and tweezers) with acetone-soaked wipes
to remove Remover PG.
C.4 Soft Bake
• Transfer wafer to programmable hot plate.
• Start program in hot plate (see Initial Preparation). “RUN” > choose program
> “ENTER”.
• Rotate wafer 90 every 15 to 20 minutes.
• Once 19C is reached, place wafer on wipe-covered aluminum heat sink. Wait
5 minutes (relaxation time).
C.5 Expose
• If necessary use an IPA soaked wipe to clean the MA6 chuck.
• Align dummy wafer with markings on wafer chuck before loading mask.
• Load mask and centre dummy wafer with respect to mask. Pull out tray and
remove dummy wafer.
• Place wafer on wafer chuck and align with markings. Do NOT adjust wafer’s
position after loading wafer if aligning with mask is not required.
• Start exposure (see Initial Preparation).
• Remove wafer. Reset Exp. type back to Soft, Al. gap back to 20 um, and WEC
back to 10 µm.
• Wipe MA6 chuck with an IPA soaked wipe to remove any SU8 residue.

188
C.6 Post Exposure Bake (PEB)
• Transfer wafer to programmable hot plate. Wait 10 minutes (relaxation time).
• Start program in hot plate (see Initial Preparation). A visible latent image
should appear in 5 to 15s.
• Rotate wafer 90 every 15 to 20 minutes.
• Once 19C is reached, place wafer on wipe-covered aluminum heat sink. Wait
5 minutes (relaxation time).
C.7 Develop
• Place stirrer onto wet deck. Place small hot plate (same height) next to it.
• Place square pyrex dish on stirrer, off-centre, using small hot plate for partial
support.
• Place 2” magnetic pellet in bath close to centre of hot plate (one half of bath)
and 1/8”-thick Teflon plate next to pellet (other half of bath).
• Pour SU8 developer in square pyrex dish.
• Place wafer gently in bath on top of Teflon plate.
• Turn stir setting to 6 and keep stirring on for 20 minutes. Rotate wafer 90
every 4 minutes during stirring.
• Prepare dish for IPA rinsing.
• Turn off stirring and remove wafer GENTLY.
• Rinse wafer GENTLY with IPA. If white film appears, return wafer to SU8
developer bath and turn on stirring for 10s. Repeat multiple times if necessary.
Nitrogen-dry GENTLY.

189
Appendix D
Antenna Radiation Efficiency
Measurements
The improved Wheeler Cap method [63],[64] was chosen for measuring the antenna
radiation efficiency because of its simple procedure, basic materials required, and rea-
sonable estimates. A Wheeler Cap is a metal enclosure (of an arbitrary shape, gen-
erally) that is large enough to contain the antenna under test (AUT) while providing
sufficient clearance to minimize the disturbance to the AUT current distribution. A
picture of the Wheeler Caps used for this project is shown in Fig. D.1.
The original Wheeler Cap method relies on two separate reflection coefficient
(S11) measurements of the AUT — in free space and inside the Wheeler Cap — to
determine the radiation resistance (Rrad) and the loss resistance (Rloss) of the AUT.
The radiation efficiency can be found (assuming a series RLC circuit model for the
radiation mechanism of the antenna) [63]:
η =Rrad
Rrad +Rloss
. (D.1)
When the AUT is in its normal operating environment, i.e. in free space, Rrad
represents the energy transferred to free space while Rloss accounts for the dissipative
losses of the AUT (metal and dielectric losses). The measured S11 provides the an-

190
Small
Wheeler Cap
Large
Wheeler Cap
AUT
150mm
305mm
VNA
Figure D.1: Wheeler Caps. The lid of the large Wheeler Cap was lifted to show theAUT mounted on the base. A coax connector connected the enclosed antenna to theVNA outside. The small Wheeler Cap is shown for size comparison.
tenna resistance that consists of both Rrad and Rloss. When the AUT is placed inside
the Wheeler Cap, no energy (ideally) is radiated into free space. Most of the energy
is reflected back to the source with some amount lost as dissipation. In this case, S11
allows Rloss to be identified independently. Rrad can then be found with the S11 from
the free space measurement. Note that impedance mismatch under normal operating
condition, which quantifies the amount of energy reflected back to the source when
the AUT is in free space, is not considered a part of radiation inefficiency. Antenna
radiation efficiency only concerns with the dissipative losses of the AUT.

191
One major limitation of the original Wheeler Cap method is the requirement of
the AUT being at resonance. In practice, the operating frequency or the frequency
at which the most optimal impedance match is achieved does not necessarily coincide
with the resonant frequency of the AUT. Therefore, the original Wheeler Cap method
does not account for the presence of any antenna reactance if one attempts to measure
the radiation efficiency at a frequency at which the AUT is not at resonance.
The improved Wheeler Cap method, on the other hand, accounts for the reactive
component of the antenna impedance at any frequency of measurement. The mea-
surement setup is almost identical to the original Wheeler Cap method. However,
more reflection coefficient measurements of the AUT inside the Cap are required.
These additional measurements provide S11 data points that describe a circle on the
Smith Chart, which is a manifestation of the phase variation of the reflected wave
within the Cap [63]. This circle is referred to as the reflection circle. The location
of the circle with respect to the free-space S11 at the measured frequency — Sfs11 —
offers the information needed to determine the radiation efficiency. The procedure is
outlined below.
For high-efficiency antennas, the reflection circle is large and quite close to the
edge circle of the Smith Chart. This is because for highly efficient antennas, the
dissipative losses are small. Hence, most of the energy is returned to the source when
these antennas are placed inside the Cap, with |S11| being close to 1. |S11| = 1 is the
edge circle of the Smith Chart.
There are generally two ways to obtain the phase variation needed to sketch the
reflection circle. One method is to change the effective internal size of the Cap by
incorporating a sliding metal plate. The second method, which was chosen for the

192
measurements performed in this project, is to perform a frequency sweep within the
frequency range of interest.
The reflection coefficient (S11) of the AUT, when placed inside the small Wheeler
Cap, is shown in Fig. D.2. It is obvious that the sweep hardly resembled a circle
as one would expect when most of the energy was supposed to be reflected back
to the source with the AUT inside the Cap. This is because the size of the Cap
was large enough to allow for multimode resonances. These multimode resonances
introduced notches of high loss [64], which are observed in the |S11| plots in Fig. D.3.
These notches represent the portions of the S11 curve that approach the centre of the
Smith Chart in Fig. D.2. The loss from these resonances would artificially lower the
measured radiation efficiency.
The ring slot antenna being measured was not an electrically small antenna, so
the Wheeler Cap could not be made any smaller to reduce the multimode resonances.
Analysis methods were demonstrated to numerically reduce the influence of these
resonances on the measured efficiency [69]. A simpler approach is to manually select
a reflection circle that contains most of the frequency-swept curve on the Smith Chart,
as it provides a reasonable representation of the reflection coefficient of the AUT if a
lot of the multimode resonances are absent. It is important to ensure that the selected
circle is not oversized, which will otherwise lead to an overestimation of the radiation
efficiency. The rule of thumb used here is that the circle must at least overlap part
of the S11 curve or be within the curve. This can be observed in the reflection circle
chosen for the S11 curve in Fig. D.4. Here ∆s,max and ∆s,min represent the longest
and the shortest distances between the selected reflection circle and the location of
Sfs11, respectively.

193
With the reflection circle chosen and relevant information obtained from the Smith
Chart, the radiation efficiency is determined using the following equation [63]:
η =2
(∆s,max)−1 + (∆s,min)−1· 1
1− |Sfs11|2
. (D.2)
By using the small Wheeler Cap shown in Fig. D.1, which was just large enough
to contain the AUT, the measured radiation efficiency is 92.1% at 2.4 GHz. This
compares very well with the simulated value of 93.7%.
To further explore the validity of this method of manually choosing the reflection
circle, the large Cap in Fig. D.1 was used. There were significantly more multimode
resonances, as expected. To avoid overcrowding the Smith Chart, the frequency sweep
was reduced to generate an |S11| plot (Fig. D.3(b)) and a curve on the Smith Chart
(Fig. D.5) similar to those observed with the small Cap. A radiation efficiency of
90.3% was obtained from the large Wheeler Cap measurement. As expected, it was
lower than the measured value using the small Cap. This was mainly attributed to the
higher metal loss from the cavity walls associated with greater number of multimode
resonances inside the large Wheeler Cap.

194
0.2
0.5
1.0
2.0
5.0
+j0.2
−j0.2
+j0.5
−j0.5
+j1.0
−j1.0
+j2.0
−j2.0
+j5.0
−j5.0
0.0 ∞
X: −0.1551Y: 0.2144
S11fs
Figure D.2: S11 (dotted black curve) of the AUT inside the small Wheeler Cap, shownon the Smith Chart, with a frequency sweep from 2.1 to 2.7 GHz. Sfs
11 represents thereflection coefficient (a complex value) of the AUT in free space at 2.4 GHz.

195
2.1 2.2 2.3 2.4 2.5 2.6 2.7−20
−15
−10
−5
0(a) Small Wheeler Cap Measurement
Freq (GHz)
|S11
| (dB
)
2.35 2.4 2.45−20
−15
−10
−5
0(b) Large Wheeler Cap Measurement
Freq (GHz)
|S11
| (dB
)
Figure D.3: |S11| of the AUT inside the Wheeler Caps.

196
0.2
0.5
1.0
2.0
5.0
+j0.2
−j0.2
+j0.5
−j0.5
+j1.0
−j1.0
+j2.0
−j2.0
+j5.0
−j5.0
0.0 ∞
X: −0.1551Y: 0.2144
X: −0.5065Y: 0.7979
X: 0.4424Y: −0.7708
S11fs
∆s,min
∆s,max
Figure D.4: Determining the reflection circle (dashed grey circle) from the measuredS11 (dotted black curve) on the Smith Chart, with a frequency sweep from 2.1 to2.7 GHz and the AUT inside the small Wheeler Cap. Each data point (X,Y) representsthe real and imaginary values of the reflection coefficient at that specific location onthe Smith Chart.

197
0.2
0.5
1.0
2.0
5.0
+j0.2
−j0.2
+j0.5
−j0.5
+j1.0
−j1.0
+j2.0
−j2.0
+j5.0
−j5.0
0.0 ∞
X: −0.1551Y: 0.2144
X: 0.5902Y: −0.601
X: −0.6101Y: 0.7161
∆s,min
∆s,max
S11fs
Figure D.5: Determining the reflection circle (dashed grey circle) from the measuredS11 (dotted black curve) on the Smith Chart, with a frequency sweep from 2.35 to2.45 GHz and the AUT inside the large Wheeler Cap.