Embed Size (px)
Citation preview
RECHERCHE OPERATIONNELLE
0. Introduction.Ce cours a´eteenseign´ejusqu’en 2002, enann´ee delicence, `alaMIAGE deNANCY.L’ob jectif principal de ce cours est d’acqu´erirune connaissance approfondie decer-taines techniques consid´erees `a l’heure acutelle comme des m´etho des de base enRecherche Op´erationnelle.Celles-ci se retrouvent en effet, sous des formes pluscomplexes, dans les analyses professionnelles de faisabilit´eou d’optimisation.Les exercices qui accompagnent ce cours permettent aux´etudiants de mo d´eliser desproblemes simples en utilisant les techniques dela Recherche Op´erationnelle.Cesexercies ne tiennent´evidemmentpas compte de tous lesparam`etres d’une v´eritableanalyse professionnelle.Ils sontsimplifies volontairement et sont choisis suivantl’orientation desetudiants,en ma jorit´e dans le domaine de la gestion;mais lestechniques utilis´ees s’appliquent´egalement `alamod´elisation en ing´enierie et ensciences.
Certainesmetho desde la Recherche Op´erationnelle se d´emontrent- au niveaumathematique -assez facilement.L’algorithme dusimplexe,par exemple,rep osesur des arguments´elementaires de l’alg`ebre lineaire.D’autres m´etho des pr´esent´eesdans cecours, parexemplecelles delaprogrammationdynamique, sontdescasparticuliers ded´evelopp ements analytiques et sto chastiquesplus avanc´es,qui, a un niveau g´eneral,ne sont plusa la portee d’unetudiant enlicence (mˆeme en math´ematiques).Une justification´elementaire de certains cas par-ticuliers est cep endant faisable et donne lieu`aquelques applications int´eressantes.D’autres m´etho des encore sont purement heuristiques, comme la m´etho de par s´epara-tion etevaluation (branch and bound) en programmation lin´eaire `a valeurs enti`eres.Il est peut-ˆetre surprenant deconstater que la presque totalit´e des probl`emes d’optimi-sationsenonc´es dans ce cours (hormis ceuxrelevant de la programmation dynamique)peuventetre resolus `a l’aide d’un algorithme de programmation lin´eaire.Cep endant,des solutions sp´ecifiques,parexemple au probl`eme du flot maximalou du flot deco ˆut total minimal dans un r´eseau, sont prop os´ees.Elles sontsouvent d´evelopp´ees`a partir d’un programme lin´eaire adapt´eau probleme sp´ecifique et fontpartie desmetho des standards dans la litt´erature recente.Ainsi la question du flot de co ˆuttotal minimal permet de pr´esenter quelques´elements du simplexe des r´eseaux.Le cours est divis´een cinq chapitres.
Les deux premiers traitent de la programmation lin´eaire.Ilscontiennent:- une intro duction`alatechnique du simplexe,une metho de standard pour la
resolution d’un programme lin´eaire;- la dualite;
–2–
-lam´ ethode des coup es et la m´etho de par s´eparation etevaluation pour laresolution deprogrammes lin´eaires quiimp osent`acertaines variables d’ˆetre`a valeurs enti`eres ou mˆeme binaires;
- l’analyse post-optimale,qui determine la variation delasolution en fonctiond’un changement desvaleursdes param`etres du programme.
Le troisieme chapitre traitede la th´eorie des jeux `a deux personnes et`asomme z´eroet s’appuie fortement sur les deux chapitres pr´ecedents.
Au quatrieme chapitre nous exp osons deux probl`emesd’optimisation deflots dansdes reseaux:le flot maximal (avec sa coup e minimale) et le flot `acoˆut total minimal.
Le dernier chapitre est une intro duction aux m´etho des´elementaires de laprogram-mation dyamique.Cedomaine esttres vaste et de nombreux asp ects ne sont pasetudies, en particulier l’aspect sto chastique en cas d’incertitudes sur les param`etres.
Les algorithmesd’optimisation li´es aux graphes (chemin delongueurmaximale ouminimale par exemple) ne figurent pas dans ce cours parce qu’ils sonttrait´es dansles cours d’outils conceptuels et d’algorithmique´egalement enseign´es `a la Miage deNancy.
Les versions initiales de ce cours, ont´etelargement inspir´ees par le trait´e(non publi´e)intitule ”Recherche Op´erationnelle” de Francis Conrad,Professeural’UniversiteHenri Poincare Nancy 1. Nous le remercions d’avoir mis ce texte `a notre disp o-sition. Nous n’avons pasconnaissance d’unlivre oud’unemonographie dontlapresentation corresp ond`a ses notes,mais nousavons puconstater queles livresrecents en Recherche Op´erationnelle, ab ordent les sujets trait´es dans ce cours.Uneliste, certainement incompl`ete, d’ouvrages r´ecents est donn´ee ci-dessous.
Bibliographie:C. Gueret, C. Prins, M. Sevaux , Programmation lin´eaire, Eyrolles, 2000.
R. Favre, B. Lemaire, C. Picouleau , Pr´ecis de recherche op´erationnel le,5`emeed., Duno d, 2000.
Y. Nob ert, R. Ouellet, R. Parent, La recherche op´erationnel le,Ga¨etan Morin,1995.
J. F. Phelizon,Methodes et mod`eles de la recherche op´erationnel le,Economica,1998.
J. F. Maurras,Programmation lin´eaire, compl´exite, Springer, 2002.
D. Alevra, M. Padb erg,Linearoptimization andextensions:problems andsolutions, Springer, 2001.
V.K. Balakrishnan , Network optimization, Chapman and Hall, 1995.
G.B. Dantzig, M.N. Thapa , Linear programming, Springer, 1997.
H.A. Eiselt, C.L. Sandblom , Integer programming and network models, Springer2000.
B. Korte, J. Vygen , Combinatorialoptimization,2nd ed.,Springer, 2002.
–3–
G. Sierksma , Linear and integer programming, Marcel Dekker, 2001.
R.J. Vanderb ei, Linear programming foundations and extensions, Kluwer, 2001.
W. Domschke, A. Drexl, Einf ¨uhrung in Operations Research, 3.Auflage, Springer,1995.
W. Domschke, A. Drexl, B. Schildt, A. Scholl, S. Voss,Ubungsbuch Opera-tions Research , Springer, 1995.
H.J. Zimmermann,Operations Research Methoden und Model le.2. Auflage.,Vieweg, 1992.
–4–
I. Programmation lin´eaire: Algorithmedu simplexeNous commen¸conspar quelques exemples quipeuventetre resolus en termes deprogrammes lin´eaires.
I.1 Exemples.a) Probleme du melange
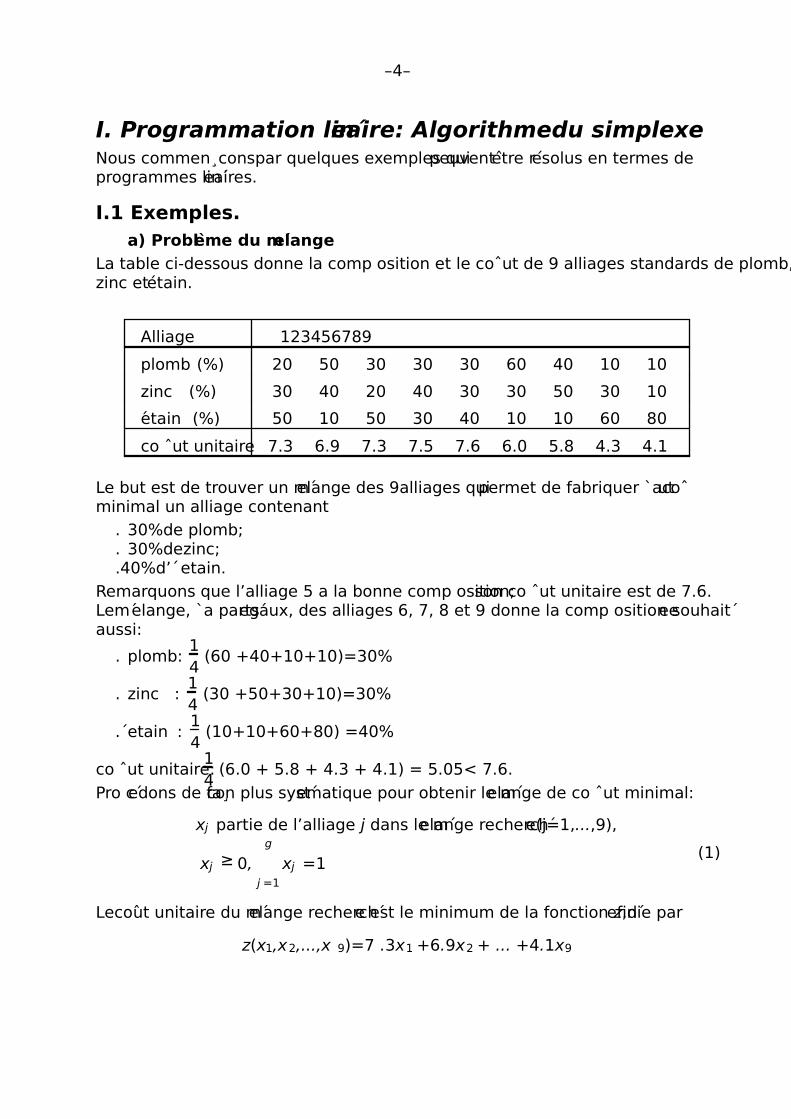
La table ci-dessous donne la comp osition et le coˆut de 9 alliages standards de plomb,zinc etetain.
Alliage 123456789
plomb (%) 20 50 30 30 30 60 40 10 10
zinc (%) 30 40 20 40 30 30 50 30 10
etain (%) 50 10 50 30 40 10 10 60 80
co ˆut unitaire 7.3 6.9 7.3 7.5 7.6 6.0 5.8 4.3 4.1
Le but est de trouver un m´elange des 9alliages quipermet de fabriquer `acoˆutminimal un alliage contenant
. 30%de plomb;
. 30%dezinc;
.40%d’´etain.
Remarquons que l’alliage 5 a la bonne comp osition;son co ˆut unitaire est de 7.6.Lemelange, `a parts´egaux, des alliages 6, 7, 8 et 9 donne la comp osition souhait´eeaussi:
. plomb:14
(60 +40+10+10)=30%
. zinc :14
(30 +50+30+10)=30%
.´etain :14
(10+10+60+80) =40%
co ˆut unitaire:14
(6.0 + 5.8 + 4.3 + 4.1) = 5.05< 7.6.
Pro cedons de fa¸con plus syst´ematique pour obtenir le m´elange de co ˆut minimal:
xj partie de l’alliage j dans le m´elange recherch´e(j=1,...,9),
xj ≥ 0,g
j =1
xj =1(1)
Lecout unitaire du m´elange recherch´e est le minimum de la fonction z,d´efinie par
z(x1,x2,...,x 9)=7 .3x1 +6.9x2 + ... +4.1x9
–5–
sous les contraintes:
30% de plomb:0.2x1 +0.5x2 + ... +0.1x9 =0.3 (2)
30% de zinc : 0.3x1 +0.4x2 + ... +0.1x9 =0.3 (3)
40% d’etain : 0.5x1 +0.1x2 + ... +0.8x9 =0.4 (4)
Le programme lin´eaire consiste `a minimiserz(x1,x2,...,x 9) sous les contraintes(1)-(4).La fonction z est souvent app el´ee la fonction - objectif (ou fonction ob jec-tive).
Remarque: (1)-(4) est un syst`eme lineaire de quatreequations et 9 inconnus.Le probleme est donc de trouver,dans l’espaceaffinedessolutions,la solution quiminimise la valeur dez(x1,...,x 9).
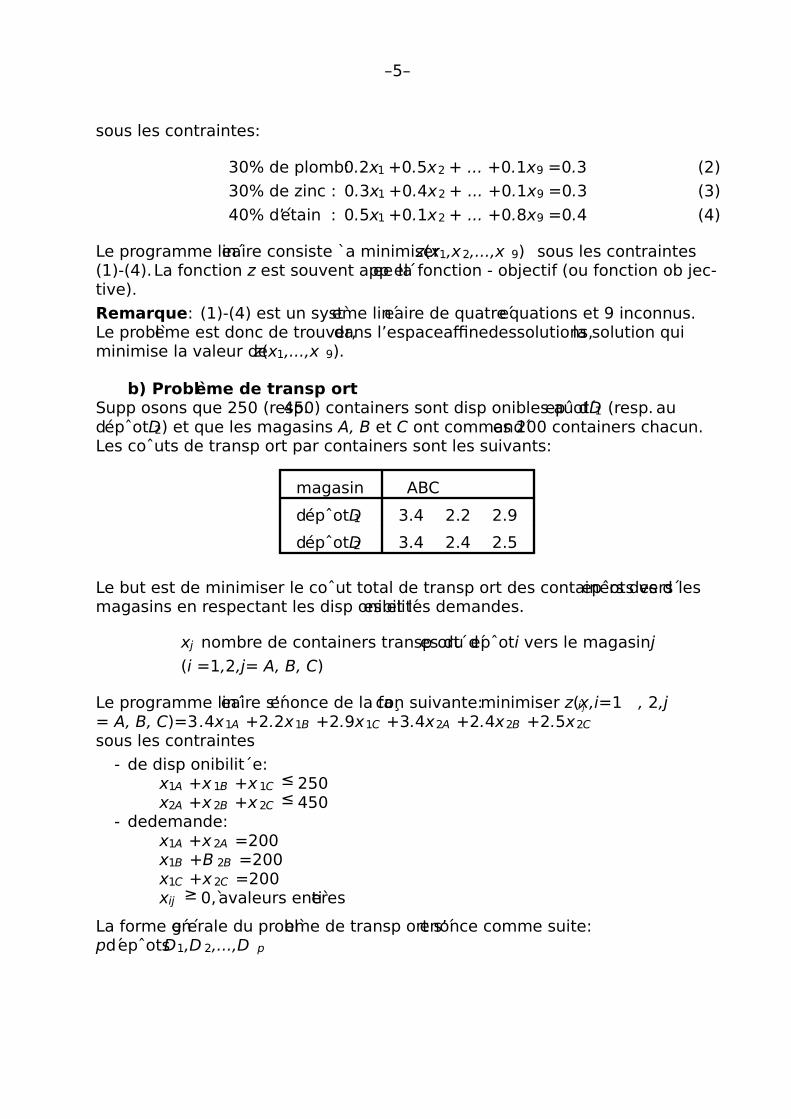
b) Probleme de transp ortSupp osons que 250 (resp.450) containers sont disp onibles au d´epˆotD1 (resp. audepˆotD2) et que les magasins A, B et C ont command´es 200 containers chacun.Les coˆuts de transp ort par containers sont les suivants:
magasin ABC
depˆotD1 3.4 2.2 2.9
depˆotD2 3.4 2.4 2.5
Le but est de minimiser le coˆut total de transp ort des containers des d´epˆots vers lesmagasins en respectant les disp onibilit´es et les demandes.
xj nombre de containers transp ort´es du depˆoti vers le magasinj
(i =1,2,j= A, B, C)
Le programme lin´eaire s’´enonce de la fa¸con suivante:minimiser z(xi j ,i=1 , 2,j= A, B, C)=3 .4x1A +2.2x1B +2.9x1C +3.4x2A +2.4x2B +2.5x2C
sous les contraintes
- de disp onibilit´e:x1A +x 1B +x 1C ≤ 250x2A +x 2B +x 2C ≤ 450
- dedemande:x1A +x 2A =200x1B +B 2B =200x1C +x 2C =200xij ≥ 0, avaleurs enti`eres
La forme g´enerale du probl`eme de transp ort s’´enonce comme suite:pdepˆotsD1,D 2,...,D p

–6–
qmagasinsM1,M 2,...,M q
ai quantite disp onible au d´epˆotDi i=1,...,p
bj quantitedemandee par le magasinMj j=1,...,q
f ij coˆut unitaire de transp ort deDi vers M j
xij quantite transp ort´ee deDi versMj
programme lin´eaire:
minimiserz(xij ,i=1, .. ., p, j =1,...,q)=p
i=1
q
j =1
f ij xij
sous les contraintesq
j =1
xij(≤)=a i i=1,...,p (depˆots)
p
i=1
xij(≥)=b j j=1,...,q (magasins)
xij ≥ 0(´eventuellement `a valeurs enti`eres)
Remarque:
1) Lechoixdu signed’ egalite ou d’inegalitedans les contraintes concernant lesdepˆots et les magasins d´ep end du contexte concret.
2)p
i=1
ai ≥q
j =1
bj (quantite disp onible≥ quantitedemandee)
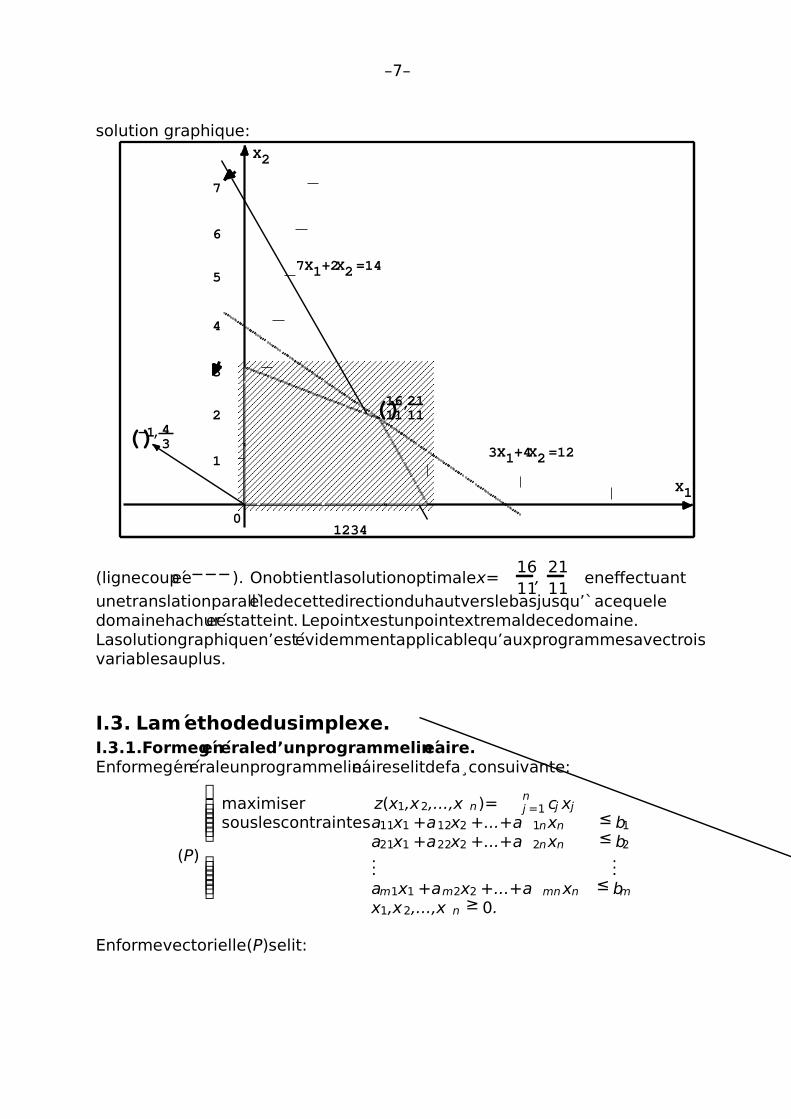
I.2. Solution graphique pour programmes lin´eairesadeuxvariables.
Exemple: maximiserz(x1,x2)=4x 1 +3x 2
sous les contraintes
3x1 +4x2 ≤ 12
7x1 +2x 2 ≤ 14,x 1,x2 ≥ 0
L’intersection des demiplans d´etermin´es par les droites qui corresp ondent aux con-traintes repr´esente l’ensemble des solutions quisatisfontauxcontraintes (domaineh a chu r´e). La direction qui corresp ond`a la fonction-ob jectif est donn´ee par
z(x1,x2)=4x 1 +3x 2 =constante
–7–
solution graphique:
01234
1
2
3
4
5
6
7
X2
X1
X1 X27 +2 =14
X1 X23 +4 =121 4
3,()
1611
2111,()
(lignecoupee−−−). Onobtientlasolutionoptimalex=1611
,2111
eneffectuant
unetranslationparalleledecettedirectionduhautverslebasjusqu’`acequeledomainehachur´eestatteint. Lepointxestunpointextremaldecedomaine.Lasolutiongraphiquen’estevidemmentapplicablequ’auxprogrammesavectroisvariablesauplus.
I.3. Lam ethodedusimplexe.I.3.1.Formegeneraled’unprogrammelineaire.Enformegeneraleunprogrammelin´eaireselitdefa¸consuivante:
(P)
maximiser z(x1,x2,...,x n)= nj =1 cj xj
souslescontraintesa11x1 +a12x2 +...+a 1nxn ≤ b1
a21x1 +a22x2 +...+a 2nxn ≤ b2...
...am1x1 +am2x2 +...+a mnxn ≤ bm
x1,x2,...,x n ≥ 0.
Enformevectorielle(P)selit:
–8–
maximiserz(x)=cxsouslescontraintesAx ≤ b, x ≥ 0,
o`uonapose:
x=
x1
x2...
xn
,c=(c 1,c2,...,c n),b=
b1
b2...
bm
A=(a ij ,i=1,...,m, j=1,...,m)=
a11 a12 ...a 1n
a21 a22 ...a 2n...
am1 am2 ...a mn
Onditque (P) estsousformecanonique.
Autreforme:(P=) maximiserz(x)=cxsouslescontraintesAx=b, x ≥ 0.
Onditque (P=) estsousformestandard.
Proposition3.1.Chaqueprogrammelin´eaireenformestandards’ecritenformecanoniqueetinversement.
Preuve.a)Ax ≤ b, x ≥ 0 (formecanonique)
⇔n
j =1
aij xj ≤ bi i=1,...,m
⇔n
j =1
aij xj +ei =bi o`u ei =bi −n
j =1
aij xj ≥ 0
ei : variabled’ecart.
Soit I m =
10
...01
lamatriced’identited’ordrem,
e=
e1...
em
levecteurd’ecart.
AlorsAx ≤ b, x ≥ 0⇔ (A,I m)xe
=b,xe
≥ 0 (formestandard).
Posonsz (x,e)=cxe
, o`uc =(c,0)=(c 1,...,c n ,0,...,0
m−fois
).
b)Ax=b (formestandard)
–9–
⇔ Ax ≥bAx ≤b
⇔ Ax ≤b(−A )x≤−b
⇔ A−A
x ≤ b−b
(formecanonique).
Exercice: Ecrireleprogrammelineairesuivantsousformecanonique:maximiserz(x)=cxsouslescontraintesAx ≤ b, x2,x3,...,x n ≥ 0.
Indication: x1 =max{0,x1},x 1”= −min{0,x1}. Remplacerx1 par x1,x1” ≥0.
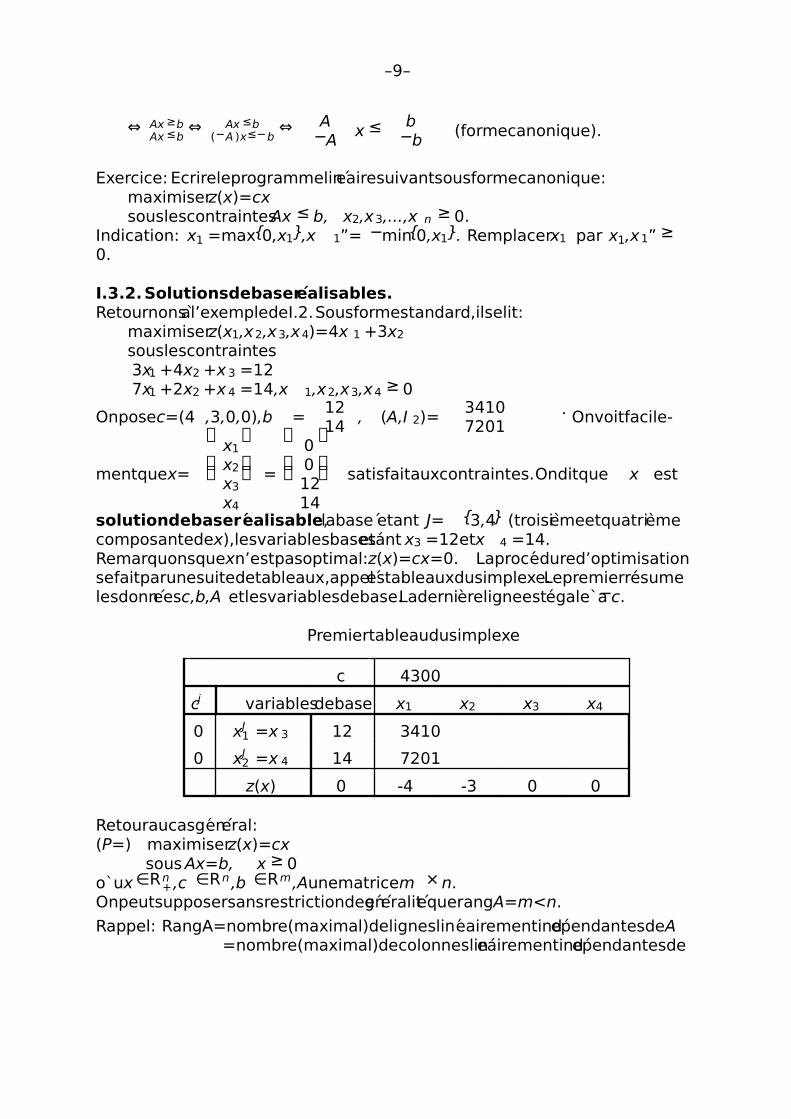
I.3.2.Solutionsdebaserealisables.Retournonsal’exempledeI.2.Sousformestandard,ilselit:
maximiserz(x1,x2,x3,x4)=4x 1 +3x2
souslescontraintes3x1 +4x2 +x 3 =127x1 +2x2 +x 4 =14,x 1,x2,x3,x4 ≥ 0
Onposec=(4 ,3,0,0),b =1214
, (A,I 2)=34107201
· Onvoitfacile-
mentquex=
x1
x2
x3
x4
=
001214
satisfaitauxcontraintes.Onditque x est
solutiondebaserealisable,labase etant J= {3,4} (troisiemeetquatriemecomposantedex),lesvariablesbases´etant x3 =12etx 4 =14.Remarquonsquexn’estpasoptimal:z(x)=cx=0. Laprocedured’optimisationsefaitparunesuitedetableaux,appelestableauxdusimplexe.Lepremierresumelesdonneesc,b,A etlesvariablesdebase.Laderniereligneestegale`a−c.
Premiertableaudusimplexe
c 4300
cj variablesdebase x1 x2 x3 x4
0 xJ1 =x 3 12 3410
0 xJ2 =x 4 14 7201
z(x) 0 -4 -3 0 0
Retouraucasgeneral:(P=) maximiserz(x)=cx
sous Ax=b, x ≥ 0o`ux ∈Rn
+,c ∈Rn ,b ∈Rm,Aunematricem × n.Onpeutsupposersansrestrictiondeg´eneralitequerangA=m<n.
Rappel: RangA=nombre(maximal)deligneslineairementind´ependantesdeA=nombre(maximal)decolonneslin´eairementind´ependantesde

–10–
A.Enfait, si RangA<mil yadescontraintesredondantesquipeuventetresup-
primees exemple:5x1 +5x2 ≤ 10,10x1 +10x2 ≤ 20,Rang5510 10
=1.
Sim=n,lasolutiondeAx=bestuniqueetdonn´ eeparx=A−1b. Iln’yadonc
rienamaximiser.
Definition.PosonsA=(a 1,a2,...,a n)( aj estlaj −emecolonnedeA),et,pourJ ⊂{1,2,...,n },posonsA J = {aj ,j ∈J }.
. J ⊂{ 1,2,...,n } estunebasede(P=) ,si |J | =metsi RangA J =Rang(aj ,j ∈J)=m
. Soitx=
x1...
xn
∈R n+.x j estvariabedebase(variablehorsbase),si j ∈
J(j/ ∈J). Onnotex J =(x j ,j ∈J).
. solutiondebaserealisable: x=
x1...
xn
∈Rn+ telquexj =0pourj/ ∈Jettel
queAx=A J xJ =b(c’est-`a-direquexJ satisfaitauxcontraintes).
Exemple(suite): Posons A=34107201
· AlorsRangA=2=m, n=4
J= {3,4},A J =1001
,RangA J =2
. variabledebase:x3 =12,x 4 =14
. variablehorsbase:x1 =x 2 =0
. solutiondebaserealisable:x=
001214
A J xJ =
1001
1214
=1214
=
b.
Remarque: L’avantagedepasserdelaformecanonique`alaformestandardestqu’onobtientimmediatementunesolutiondebaserealisablequisertdesolutiondedepartpourl’algorithmedusimplexe.Lesvariablesdebasesontlesvariablesd’ecart.
I.3.3.Changementdebaserealisable.Soitxunesolutiondebaser ealisablede(P=). Onaalors
z(x)=cx=c J xJ o`u cJ =(c j ,j ∈J).
Lebutestdetrouveruneautrebaser´ ealisable,noteeJ, etunesolutiondebaserealisableassoci´ee,noteex,telque z(x)>z(x)( xestmeilleurquex).
–11–
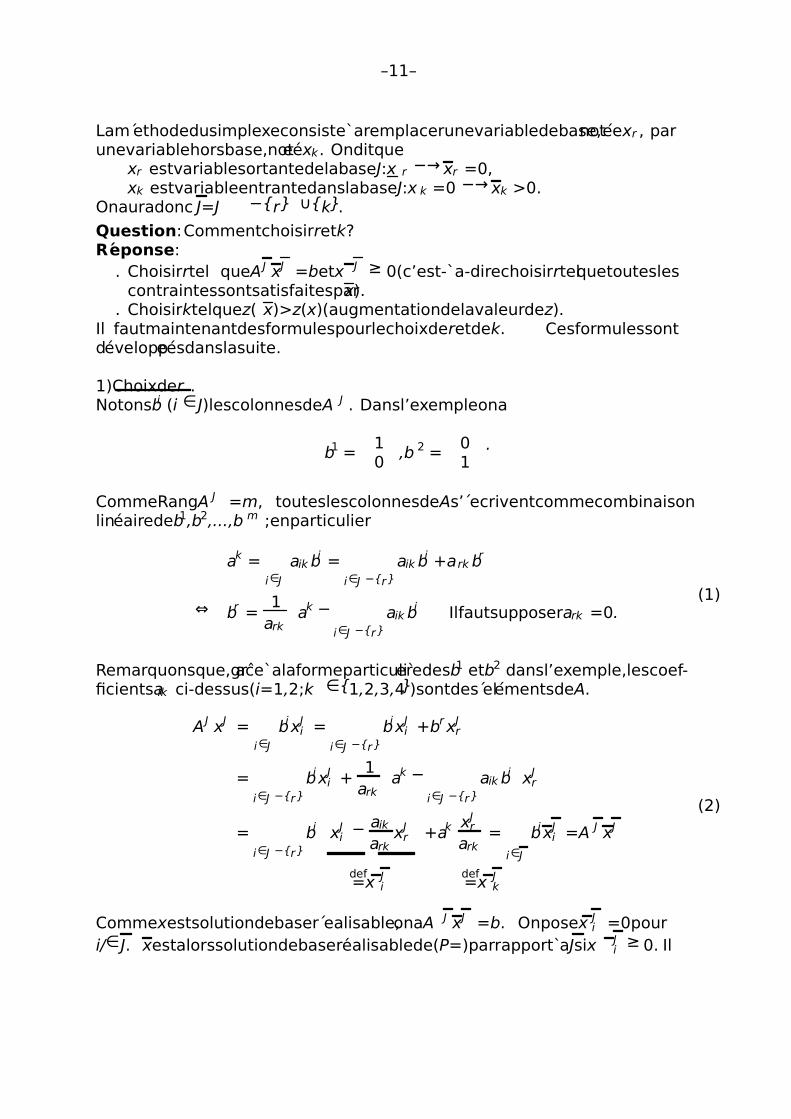
Lam ethodedusimplexeconsiste`aremplacerunevariabledebase,noteexr , parunevariablehorsbase,not´eexk. Onditque
xr estvariablesortantedelabaseJ:x r −→ xr =0,xk estvariableentrantedanslabaseJ:x k =0 −→ xk >0.
Onauradonc J=J −{r} ∪{k}.
Question:Commentchoisirretk?Reponse:
. Choisirrtel queA J xJ =betx J ≥ 0(c’est-`a-direchoisirrtelquetouteslescontraintessontsatisfaitesparx).
. Choisirktelquez( x)>z(x)(augmentationdelavaleurdez).Il fautmaintenantdesformulespourlechoixderetdek. Cesformulessontdevelopp´eesdanslasuite.
1)Choixder .Notonsbi (i ∈J)lescolonnesdeA J . Dansl’exempleona
b1 =10
,b 2 =01
·
CommeRangA J =m, touteslescolonnesdeAs’ ecriventcommecombinaisonlineairedeb1,b2,...,b m ;enparticulier
ak =i∈J
aik bi =i∈J −{r}
aik bi +ark br
⇔ br =1
arkak −
i∈J −{r}aik bi Ilfautsupposerark =0.
(1)
Remarquonsque,grˆace`alaformeparticuli`eredesb1 etb2 dansl’exemple,lescoef-ficientsaik ci-dessus(i=1,2;k ∈{1,2,3,4})sontdes elementsdeA.
AJ xJ =i∈J
bi xJi =
i∈J −{r }bixJ
i +br xJr
=i∈J −{r}
bi xJi +
1ark
ak −i∈J −{r}
aik bi xJr
=i∈J −{r}
bi xJi
− aik
arkxJ
r +ak xJr
ark=
i∈J
bi xJi =A J xJ
def=x J
idef=x J
k
(2)
Commexestsolutiondebaser ealisable,onaA J xJ =b. Onposex Ji =0pour
i/∈J. xestalorssolutiondebaserealisablede(P=)parrapport aJsix Ji
≥ 0. Il
–12–
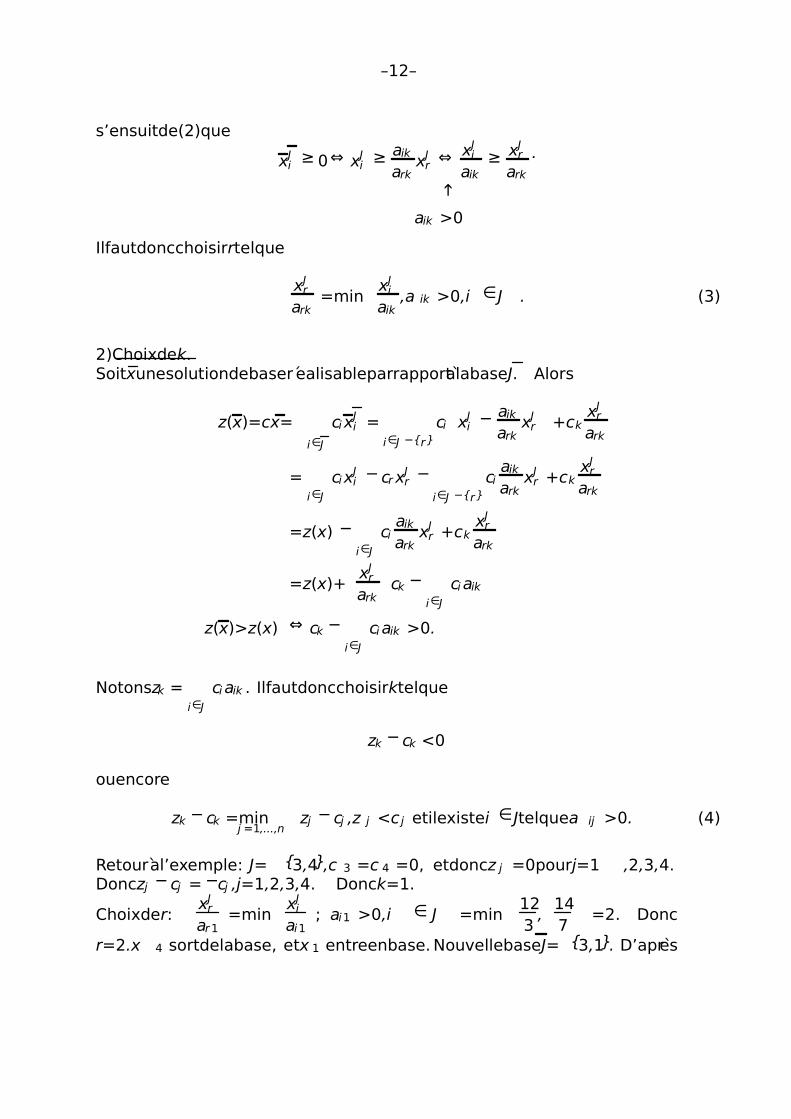
s’ensuitde(2)que
xJi
≥ 0⇔ xJi
≥ aik
arkxJ
r⇔ xJ
i
aik≥ xJ
r
ark·
↑
aik >0
Ilfautdoncchoisirrtelque
xJr
ark=min
xJi
aik,a ik >0,i ∈J . (3)
2)Choixdek.Soitxunesolutiondebaser ealisableparrapportalabaseJ. Alors
z(x)=cx=i∈J
cixJi =
i∈J −{r}ci xJ
i− aik
arkxJ
r +ckxJ
r
ark
=i∈J
cixJi
− cr xJr
−i∈J −{r}
ciaik
arkxJ
r +ckxJ
r
ark
=z(x) −i∈J
ciaik
arkxJ
r +ckxJ
r
ark
=z(x)+xJ
r
arkck −
i∈J
ci aik
z(x)>z(x) ⇔ ck −i∈J
ci aik >0.
Notonszk =i∈J
ci aik . Ilfautdoncchoisirktelque
zk −ck <0
ouencore
zk − ck =minj =1,...,n
zj − cj ,z j <c j etilexistei ∈Jtelquea ij >0. (4)
Retoural’exemple: J= {3,4},c 3 =c 4 =0, etdoncz j =0pourj=1 ,2,3,4.Donczj −cj = −cj ,j=1,2,3,4. Donck=1.
Choixder:xJ
r
ar1=min
xJi
ai1; ai1 >0,i ∈ J =min
123
,147
=2. Donc
r=2.x 4 sortdelabase, etx 1 entreenbase. NouvellebaseJ= {3,1}. D’apres
–13–
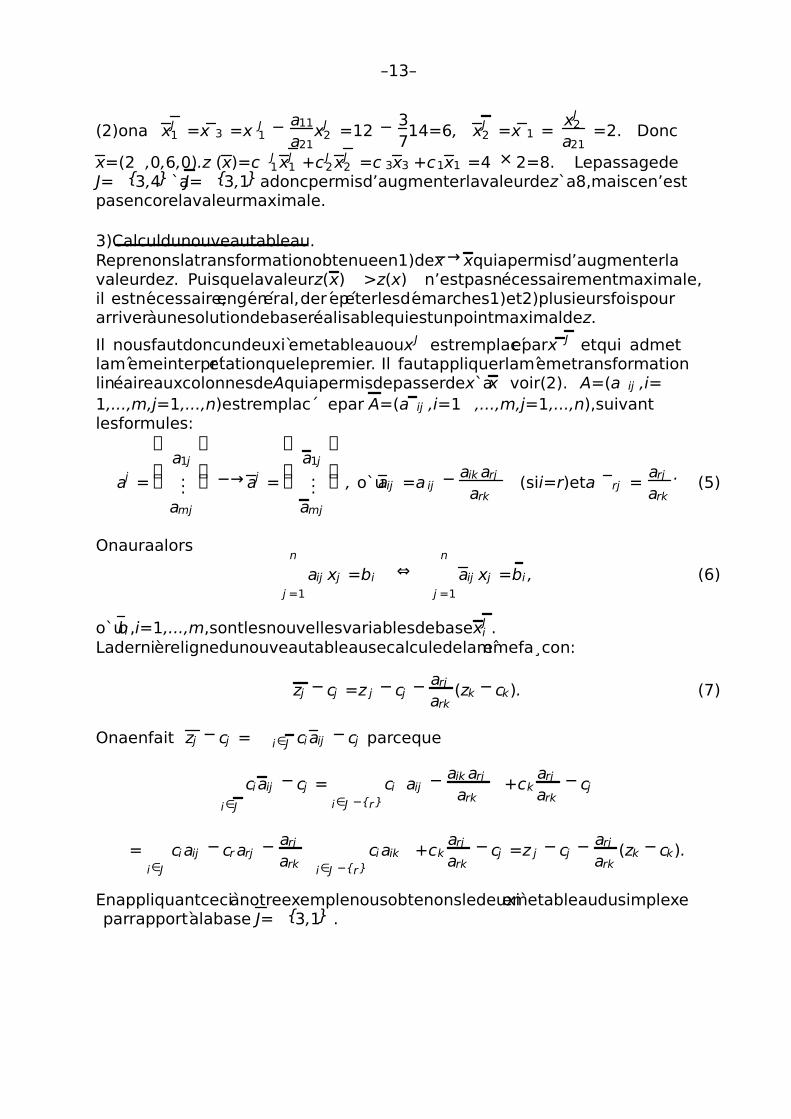
(2)ona xJ1 =x 3 =x J
1− a11
a21xJ
2 =12 − 3714=6, xJ
2 =x 1 =xJ
2
a21=2. Donc
x=(2 ,0,6,0).z (x)=c J1xJ
1 +c J2xJ
2 =c 3x3 +c1x1 =4 × 2=8. LepassagedeJ= {3,4} `aJ= {3,1} adoncpermisd’augmenterlavaleurdez`a8,maiscen’estpasencorelavaleurmaximale.
3)Calculdunouveautableau.Reprenonslatransformationobtenueen1)dex−→ xquiapermisd’augmenterlavaleurdez. Puisquelavaleurz(x) >z(x) n’estpasnecessairementmaximale,il estnecessaire,engeneral,der epeterlesdemarches1)et2)plusieursfoispourarriveraunesolutiondebaserealisablequiestunpointmaximaldez.
Il nousfautdoncundeuxi emetableauouxJ estremplaceparx J etqui admetlamemeinterpretationquelepremier. Il fautappliquerlamemetransformationlineaireauxcolonnesdeAquiapermisdepasserdex`ax voir(2). A=(a ij ,i=1,...,m,j=1,...,n)estremplac´ epar A=(a ij ,i=1 ,...,m,j=1,...,n),suivantlesformules:
aj =
a1j...
amj
−→ aj =
a1j...
amj
, o`uaij =a ij − aik arj
ark(sii=r)eta rj =
arj
ark· (5)
Onauraalorsn
j =1
aij xj =bi ⇔n
j =1
aij xj =bi , (6)
o`ubi ,i=1,...,m,sontlesnouvellesvariablesdebasexJi .
Ladernierelignedunouveautableausecalculedelamˆemefa¸con:
zj − cj =z j −cj − arj
ark(zk −ck). (7)
Onaenfait zj − cj = i∈J ci aij −cj parceque
i∈J
ciaij − cj =i∈J −{r}
ci aij − aik arj
ark+ck
arj
ark− cj
=i∈J
ci aij −cr arj − arj
ark i∈J −{r}ci aik +ck
arj
ark−cj =z j − cj − arj
ark(zk −ck).
Enappliquantcecianotreexemplenousobtenonsledeuxi`emetableaudusimplexeparrapportalabase J= {3,1} .

–14–
DeuxiemetableaudusimplexeJ= {3,1}
c 4300
cj variablesdebase x1 x2 x3 x4
0 xJ1 =x 3 6 0 22/7 1 -3/7
4 xJ2 =x 1 2 1 2/7 0 1/7
z(x) 8 0 -13/7 0 4/7
Commeonad ej`avuepartie2)lavaleurdezestpass´eedezero`a8,maisil yaencoredesvaleursn´egativesenderni`erelignedutableau.Unautrechangementdebasedoitetreeffectu´eenappliquantlesformules(3)et(4)remplac´epar J:
k=2, minxJ
i
ai2; i=1,2 =min
22/7
,6
22/7=min 7,
2111
=2111
,
r=1,x 3 sortdebase.J= {2,1} estlanouvellebase.
Remarquonsque,d’apres(6), ledeuxiemetableaus’interpr`etedememefa¸conquelepremier:
0 227 1 −3
71 2
7 0 17
x1
x2
x3
x4
=6
2=
x3
x1=
xJ1
xJ2
avecsolutiondebaserealisablexJ =x1
x3=
26
et x2 =x 4 =0.
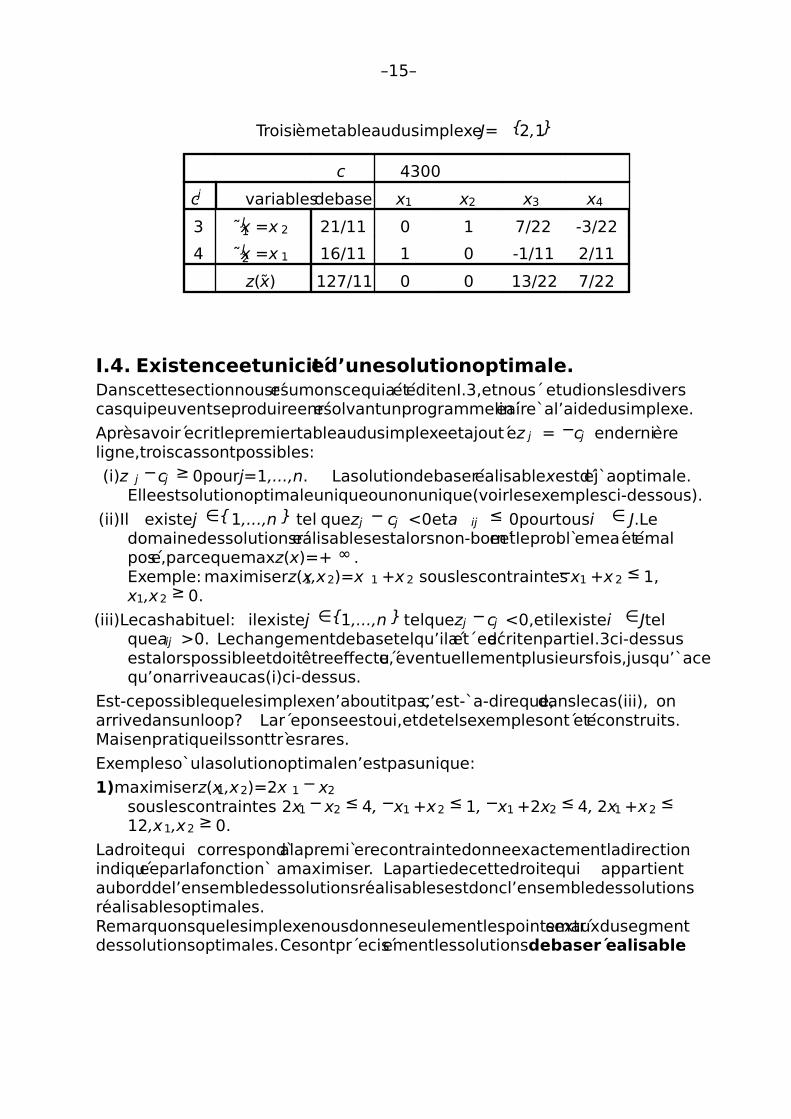
Notonsaussiquelastructuredescolonnesqucorrespondentauxvariablesdebase(x1 etx 3)estlamˆ emequecelledescolonnesquicorrespondentauxvariablesdebasedutableaudedepart.Cecipermetdeprocederdememefa¸conpourpasserautroisiemetableau,enappliquantlesformules(2)`a(7). Lavaleurdezpassealorsde8 a127/11,etcettevaleurestmaximaleparcequetouteslesvaleursdeladerni`erelignesontnonnegatives.Lasolutionoptimaleestdonc˜x=(x1,˜x2)= 16
11, 2111 ,
cequiconfirmeleresultatobtenuenI.2.
Elleestuniqueparcequ’aucunchangementdebasen’estpluspossible.
–15–
TroisiemetableaudusimplexeJ= {2,1}
c 4300
cj variablesdebase x1 x2 x3 x4
3 ˜xJ1 =x 2 21/11 0 1 7/22 -3/22
4 ˜xJ2 =x 1 16/11 1 0 -1/11 2/11
z(x) 127/11 0 0 13/22 7/22
I.4. Existenceetunicited’unesolutionoptimale.Danscettesectionnousr´esumonscequiaeteditenI.3,etnous´etudionslesdiverscasquipeuventseproduireenr´esolvantunprogrammelin´eaire`al’aidedusimplexe.
Apresavoir ecritlepremiertableaudusimplexeetajout ez j = −cj enderniereligne,troiscassontpossibles:
(i)z j −cj ≥ 0pourj=1,...,n. Lasolutiondebaserealisablexestdej`aoptimale.Elleestsolutionoptimaleuniqueounonunique(voirlesexemplesci-dessous).
(ii)Il existej ∈{1,...,n } tel quezj − cj <0eta ij ≤ 0pourtousi ∈ J.Ledomainedessolutionsr´ealisablesestalorsnon-born´eetleprobl emeaetemalpose,parcequemaxz(x)=+ ∞ .Exemple: maximiserz(x1,x2)=x 1 +x 2 souslescontraintes−x1 +x 2 ≤ 1,x1,x2 ≥ 0.
(iii)Lecashabituel: ilexistej ∈{1,...,n } telquezj −cj <0,etilexistei ∈Jtelqueaij >0. Lechangementdebasetelqu’ilaet´ed´ecritenpartieI.3ci-dessusestalorspossibleetdoitetreeffectu´e, eventuellementplusieursfois,jusqu’`acequ’onarriveaucas(i)ci-dessus.
Est-cepossiblequelesimplexen’aboutitpas,c’est-`a-direque,danslecas(iii), onarrivedansunloop? Lar eponseestoui,etdetelsexemplesont eteconstruits.Maisenpratiqueilssonttr esrares.
Exempleso`ulasolutionoptimalen’estpasunique:
1)maximiserz(x1,x2)=2x 1 − x2
souslescontraintes 2x1 −x2 ≤ 4, −x1 +x2 ≤ 1, −x1 +2x2 ≤ 4, 2x1 +x2 ≤12,x1,x2 ≥ 0.
Ladroitequi correspondalapremi erecontraintedonneexactementladirectionindiqueeparlafonction` amaximiser. Lapartiedecettedroitequi appartientauborddel’ensembledessolutionsrealisablesestdoncl’ensembledessolutionsrealisablesoptimales.Remarquonsquelesimplexenousdonneseulementlespointsextr´emauxdusegmentdessolutionsoptimales.Cesontpr ecisementlessolutionsdebaser ealisable
–16–
optimales.Lesautressolutionsrealisablesoptimalessontlescombinaisonsconvexesdecessolutionsdebaseoptimales.Il esttoujoursvrai quelessolutionsdebaseoptimalessontdespointsextr´emauxdel’ensembleconvexedessolutionsoptimales(voirTh eoreme5.2).
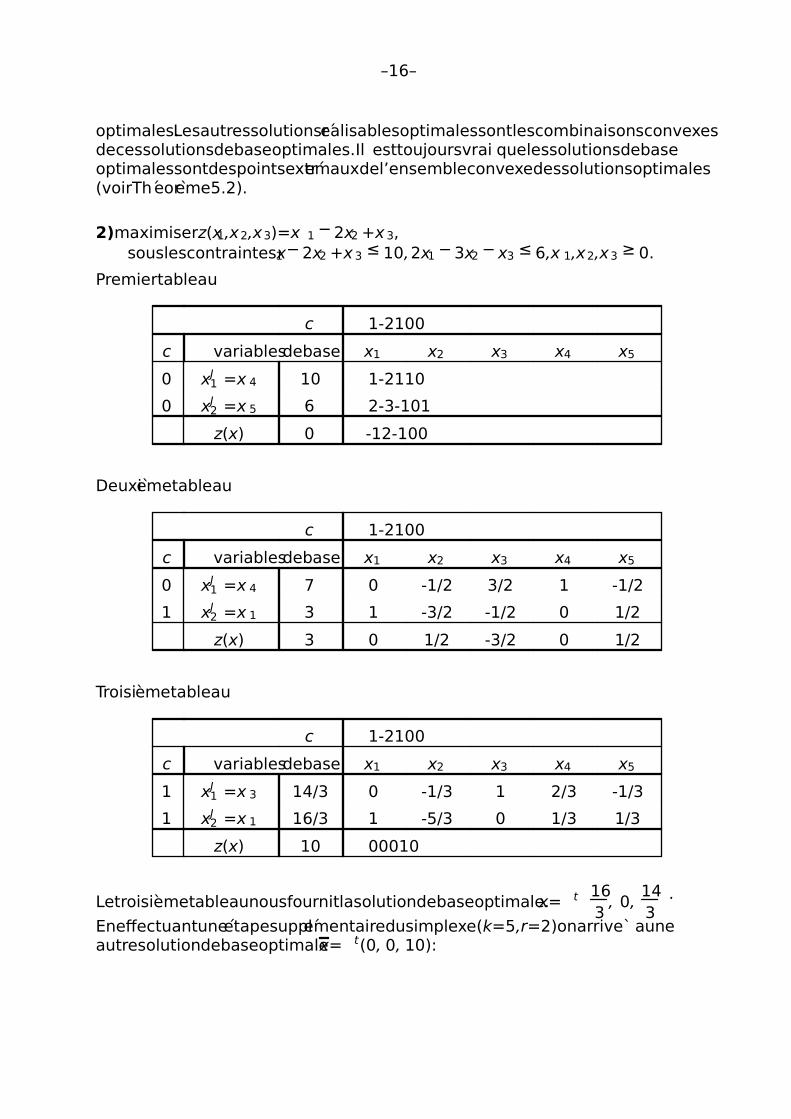
2)maximiserz(x1,x2,x3)=x 1 − 2x2 +x 3,souslescontraintesx1 − 2x2 +x 3 ≤ 10,2x1 − 3x2 − x3 ≤ 6,x 1,x2,x3 ≥ 0.
Premiertableau
c 1-2100
c variablesdebase x1 x2 x3 x4 x5
0 xJ1 =x 4 10 1-2110
0 xJ2 =x 5 6 2-3-101
z(x) 0 -12-100
Deuxiemetableau
c 1-2100
c variablesdebase x1 x2 x3 x4 x5
0 xJ1 =x 4 7 0 -1/2 3/2 1 -1/2
1 xJ2 =x 1 3 1 -3/2 -1/2 0 1/2
z(x) 3 0 1/2 -3/2 0 1/2
Troisiemetableau
c 1-2100
c variablesdebase x1 x2 x3 x4 x5
1 xJ1 =x 3 14/3 0 -1/3 1 2/3 -1/3
1 xJ2 =x 1 16/3 1 -5/3 0 1/3 1/3
z(x) 10 00010
Letroisiemetableaunousfournitlasolutiondebaseoptimale.x= t 163
, 0,143
·
Eneffectuantuneetapesuppl´ementairedusimplexe(k=5,r=2)onarrive` auneautresolutiondebaseoptimalex= t(0, 0, 10):

–17–
Quatriemetableau
c 1-2100
c variablesdebase x1 x2 x3 x4 x5
1 xJ1 =x 3 10 1-2110
0 xJ2 =x 5 16 3-5011
z(x) 10 00010
Touteslescombinaisonsconvexesdecesdeuxsolutionsoptimalessontdoncdessolutionsoptimalesaussi.Independantdusimplexeonpeutverifierdirectementquelesvecteurssuivantssontdessolutionsoptimaleseuxaussi:
xϕ = t 163
+53ϕ, ϕ,
143
+13ϕ pourtousϕ>0
Ona´evidemmentz(x)=z(x)=z(x ϕ)=10pourtousϕ>0.
Terminonsceparagraphepardespreuvesmath´ematiquesdequelques´enonc´escon-cernantlesimplexe.Retournonsalaformestandard:
(P=)maximiserz(x)=cxsouslescontraintesAx=b, x ≥ 0
Theoreme4.1.Soitx ∈Rn+ unesolutiondebaserealisablede(P=)parrapport
`aunebaseJ |J | =m=rangA. Soitz j =i∈J
ciaij .Siz j − cj ≥ 0pourtous
j=1,...,n,xestsolutiondebaser´ ealisableoptimale.
Preuve.SoitA=(a 1,a2,...,a n),A J =(a j ,j ∈J)=(b i ,i=1,...,m).Soitx0 uneautresolutionrealisablede(P=)parrapportalabaseJ.Ad´ emontrer:z(x) ≥ z(x0).
Ax0 =b ⇔n
j =1
aj x0j =b ⇔
n
j =1
m
i=1
aij bi x0j =
m
i=1
bin
j =1
aij x0j =b
Ax=b ⇔ A J xJ =b ⇔m
i=1
xJi bi =b
DoncxJi =
n
j =1
aij x0j i=1,...,m
z(x)=m
i=1
ci xJi =
m
i=1
ci
n
j =1
aij x0j =
n
j =1
x0j
m
i=1
ci aij
=n
j =1
x0j zj ≥
n
j =1
x0j cj =z(x 0)
–18–
Theoreme4.2.Soitx ∈Rn+ unesolutiondebaserealisablede(P=)parrapport
`aunebaseJ. |J | =m=rangA. Soitz j =i∈J
ci aij . Supposonsqueaij ≤ 0pour
tousi ∈Jetpourtousj ∈{1,...,n } telquezj −cj <0. Alorsl’ensemblez(x),xestsolutionrealisableestunensemblenonborn´e.
Preuve.OnreprendlesnotationsduTheoreme4.1.
AJ xJ =m
i=1
bi xJi =
m
i=1
bixJi
− ϕak +ϕak =bk/ ∈J,z k <ck,ϕ>0
⇔m
i=1
bi xJi
−ϕm
i=1
aik bi +ϕak =b
⇔m
i=1
bi (xJi
− ϕaik )+ϕa k =b.
Commeaik ≤ 0parhypothese,xϕi
def=x J
i− ϕaik ≥ xJ
i . Onposexϕk
def=ϕ>0.
Doncxϕ definieparxϕi i ∈J ∪{k} commeci-dessusetparxϕi =0pouri/ ∈J ∪{k}
estunesolutionrealisablede(P=),maispasn ecessairementunesolutiondebaserealisable.
z(xϕ)=m
i=1
ci xϕi +ckxϕ
k =m
i=1
ci (xJi
− ϕaik )+c kϕ
=z(x) − ϕm
i=1
ci aik −ck =z(x) − ϕ(zk −ck)>z(x)
puisquezk − ck <0. Enfaisanttendre ϕ +∞ onvoitquez(x ϕ)n’estpasborne.
I.5. Structuregeometriquedessolutionsr´ealisables.Pourlesexemplesqu’onar esolugraphiquement,laoulessolutionsoptimalessetrouventtoujourssurleborddel’ensembleconvexedessolutionsr´ealisables.Silasolutionoptimaleetaituniqueil s’agissaitd’unpointextremal.Cecin’estpasunhasard;c’estenfaittoujourslecas,commelemontrentlesenonc´esquisuivent.
Commen¸consparquelquesd´efinitions:. UnensembleE⊂R n estconvexesi
x1,x2 ∈E,0<λ<1= ⇒ λx1 +(1 −λ)x2 ∈E.
. xestpointextremaldel’ensembleconvexeEsil’enonc´esuivantvaut
ilexiste x1,x2 ∈Eetλ ∈[0,1]telquex=λx 1 +(1 −λ)x2 =⇒ x1 =x 2 =x

–19–
Rappelonslaformecanoniqued’unprogrammelin´eaire:
(P)maximiserz(x)=cx
souslescontraintesAx≤ b, x ≥ 0,
o`uonsupposequelamatriceAestunematricem× nderang´egal`am(<n). Laformestandardestalorsdonn´eepar
(P=)maximiserz(x)=cx
souslescontraintes(A,Im)xe
=b,x ∈Rn+,e ∈Rm
+
Lemme5.1.SoitΓ(resp. Σ)l’ensembledessolutionsr´ealisablesde(P) resp.de(P=)):
Γ= {x ∈Rn , ; Ax ≤ b, x ≥ 0}
Σ=xe
∈Rm+n , (A,I m)xe
=0,x ∈Rn+,e ∈Rm
+
ΓetΣsontdesensemblesconvexesetferm´es.
Esquissedelapreuve.Ad emontrer
a)x 1,x2 ∈Γ, 0<λ<1= ⇒ xdef=λx 1 +(1 − λ)x2 ≥ 0etAx ≤ b
b) {xn}n∈N ⊂ Γ,x n −→n↑∞
x=⇒ x ∈Γ
etpareilpourΣ.
Rappelonsquelamethodedusimplexesesertuniquementdesolutionsdebasede(P=). Letheoremesuivantnousditquecesontenfaitlespointsextr´emauxdeM.
Theoreme5.2x0
e0 estsolutiondebaserealisablede(P=)si etseulementsi
x0
e0 estpointextremaldeΣ.
Remarque.Ils’ensuitquechaquepointextr´emaldeΓestsolutiondebaser´ealisablede(P=).
Lesexempleso`ulasolutionn’estpasuniquemontrentquelessolutionsoptimalessetrouventsurlebord. Leth eoremesuivantconfirmecefait.
Theoreme5.3. Chaquesolutionoptimalede(P)(resp.de(P=))faitpartieduborddeΓ(resp. deΣ).

–20–
Preuve.Soituunpointint´erieurdeΣ,telquez(u)=cu=max {z(v),v ∈Σ}.Il
existealorsε>0telque {v ∈Rn+m ; |u−v| <ε}⊂ Σ,enparticulier v=u+εz
tc|c|
.
Maisz( v)=c v=cu+ε2|c| >z(u),cequiestunecontradictional’hypothesequeu
estunpointmaximaldez.
Est-cepossiblequ’ilexistedessolutionsoptimales,maisqu’iln’existepasdesolutiondebaserealisableoptimale?Lesimplexe,netraitantquedesolutionsdebasenepermettraitalorspasdetrouverunesolutionoptimale.Leth eoremesuivantditquececin’estpaslecas.
Theoreme5.4.Si(P=)poss`edeunesolutionoptimale,alors(P=)possedeunesolutiondebaserealisableoptimale.
Conclusion.S’ilexistedessolutionsoptimales,ellessetrouventsurleborddeΣparletheoreme5.3.,etilexistetoujoursunesolutiondebaser´ealisableoptimale,quiestunpointextremaldeΣd’apresleTh eoreme5.2.etqu’ontrouveal’aidedusimplexe.
I.6. Initialisationdelamethodedusimplexe.Jusqu’`apresentonasupposequeleprogrammelin eairededepartestenformecanonique. Dans cecas unesolutionr ealisableinitialeestfacileaobtenir, etl’algorithmedusimplexes’appliquedirectement`alaformestandardassociee.Sileprogrammeded´epartestdej`aenformestandard,unesolutiondebaser´ealisablequisertdesolutioninitialen’estpastoujoursimm´ediatecommelemontrel’exemplesuivant:
Maximiserz(x)= −x1 +2x2 − 2x3
souslescontraintesx1 +x 2 − x3 =3, −x1 +3x2 = −4etx 1,x2,x3 ≥ 0.
Nouspresentonsdanscettesectiondeuxtechniquesquipermettentdetrouverunesolutiondebaserealisablequisertdesolutioninitialepourlesimplexe.
I.6.1.LaM´ethodeM.Supposonsqueleprogrammelin´eaire`aresoudreestdonn´epar
(P=)maximiserz(x)=cx,
souslescontraintesAx=b,x ≥ 0
(Amatricem ×n,RangA=m<n).
Enajoutantdesvariablesd’´ecarts(designepositifoun´egatif)ilesttoujourspossibledemettreunprogrammelin´eaireenlaforme(P=)ci-dessusavecb∈Rm
+ . S’iln’est
–21–
pasevidentdetrouverunesolutiondebaserealisablequipeutservirdesolutioninitialepourlesimplexe,onajouteauxcontraintesdesvariablesartificiellesyi ≥ 0:
Ax=bestremplaceparAx+y=b, y= t(y1,y2,...,y m) ∈Rm+ .
Lesnouvellescontraintesnesontbiensurpas´equivalentesauxcontraintesinitiales.Onp enaliselesyi >0enrempla cantlafonction-objectifz(x)parz(x,y)=cx −
Mm
i=1
yi ,o uMestunevaleurpositivetr` eselevee. Onchoisiralesy i =b i ,i=
1,...,m,commesolutiondebaserealisablequisertdesolutioninitiale.Diminuantconsiderablementlavaleurdez,ellesvontdisparaˆıtredelabaseaucoursdesetapesdusimplexe.Etantfinalementdesvariableshorsbase,leurvaleursera´egale`az´eroetleprogrammelineaireresoluseraquandmemeleprogramme(P=).
Defaconplusprecise,onpartduprogrammelineairesuivant:
(PM )maximiserz(x,y)=cx − Mm
i=1
yi
souslescontraintesAx+y=b, x ∈Rn+,y ∈Rm
+ ,b ∈Rm+ .
S’il yadescomposantesdebqui sontnegatives,onmultipliepar( −1)lescon-traintesinitialesconcern´ees.
Lasolutiondebaserealisableinitialeesty=b.Onexprimez entermesdevariableshorsbaseensubstituantlesyi :
n
j =1
aij xj +yi =bi ⇔ yi =bi −n
j =1
aij xj
z(x,y)=cx − Mm
i=1
bi −n
j =1
aij xj
=n
j =1
cj +Mm
i=1
aij xj − Mm
i=1
bi
1ercas.Letableaufinal dusimplexeappliqu´e`a(PM )comporteunouplusieursyi >0. Leprogrammeinital(P=)n’aalorspasdesolutionsdebaser ealisablesetdoncpasdesolutionsrealisablesdutout.
Eneffet: Si (P=)poss`edeunesolutiondebaserealisable(c’est-`a-dire∃ x ∈R n+
tel queAx=b), leM>>0auraitfaitsortirtouslesy i delabaseenlesposantegal`azero.
2ndcas.Letableaufinal necomportepasdeyi envariablesdebase.Lasolutionoptimalede(PM )estalorssolutionde(P=), parcequeyi =0( i=1 ,2,...,m).Ilrestealors`asepersuaderqu’ils’agitdela(oud’une)solutiondebaserealisableoptimalede(P)(voirTh´eoreme4.1.).
–22–
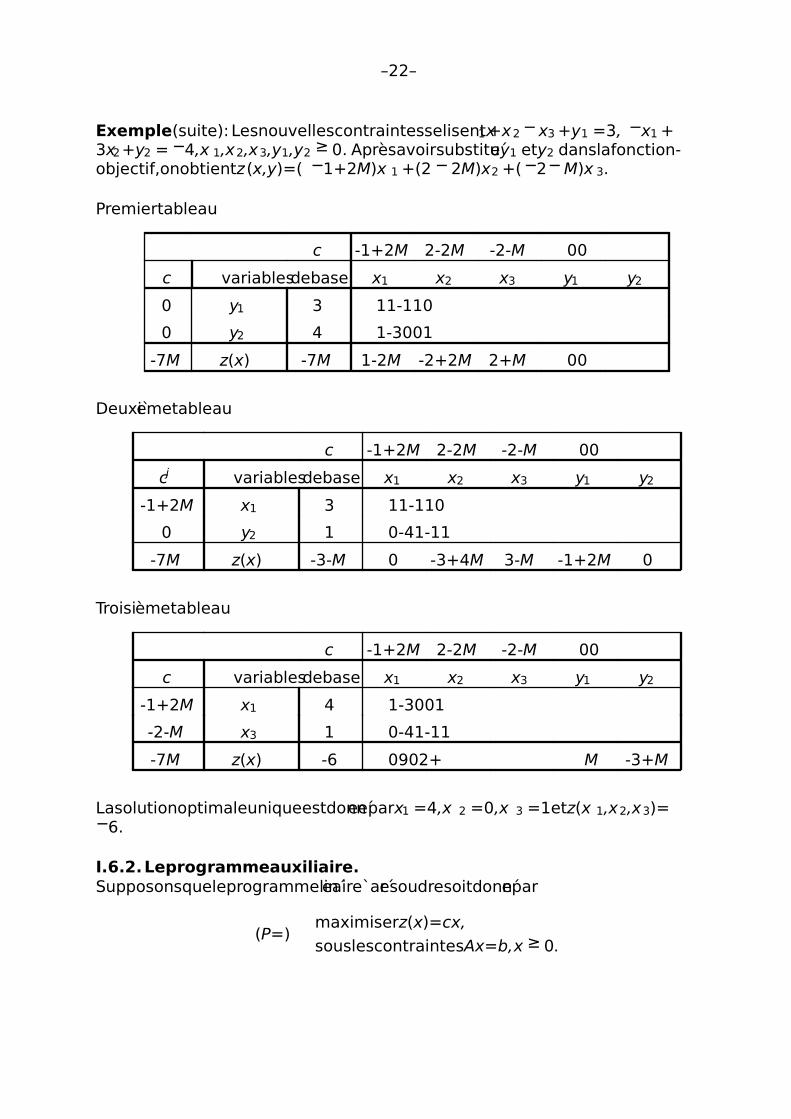
Exemple(suite): Lesnouvellescontraintesselisentx1 +x2 −x3 +y1 =3, −x1 +3x2+y2 = −4,x 1,x2,x3,y1,y2 ≥ 0. Apresavoirsubstitu´ey1 ety2 danslafonction-objectif,onobtientz(x,y)=( −1+2M)x 1 +(2 − 2M)x2 +(−2−M)x 3.
Premiertableau
c -1+2M 2-2M -2-M 00
c variablesdebase x1 x2 x3 y1 y2
0 y1 3 11-110
0 y2 4 1-3001
-7M z(x) -7M 1-2M -2+2M 2+M 00
Deuxiemetableau
c -1+2M 2-2M -2-M 00
cj variablesdebase x1 x2 x3 y1 y2
-1+2M x1 3 11-110
0 y2 1 0-41-11
-7M z(x) -3-M 0 -3+4M 3-M -1+2M 0
Troisiemetableau
c -1+2M 2-2M -2-M 00
c variablesdebase x1 x2 x3 y1 y2
-1+2M x1 4 1-3001
-2-M x3 1 0-41-11
-7M z(x) -6 0902+ M -3+M
Lasolutionoptimaleuniqueestdonn´eeparx1 =4,x 2 =0,x 3 =1etz(x 1,x2,x3)=−6.
I.6.2.Leprogrammeauxiliaire.Supposonsqueleprogrammelin´eaire`aresoudresoitdonn´epar
(P=)maximiserz(x)=cx,
souslescontraintesAx=b,x ≥ 0.
–23–
Lamethodeduprogrammeauxiliaireconsiste`afairetendreM ↑+∞ dans(PM )etresoudreleprogrammequ’onobtientapr`eslepassage`alalimite.Soit
z”(x,y)def=
1M
z (x,y)=c
Mx −
m
i=1
yi .
Maximiserz(x,y)revientamaximiserz”(x,y)ouencore`amaximiserlimM →∞
z”(x,y)=
−m
i=1
yi .Onr´esouddoncleprogrammeauxilaire(PA ),donnepar
(PA )maximiserz”(y)=−
m
i=1
yi
souslescontraintesAx+y=b, x ∈Rn+,y ∈Rm
+ ,b ∈Rm+ .
Onappliquelesimplexe`a(PA )enpartantdelasolutiondebaser ealisabley=b.
1ercas.maxz”(y)<0. Il existeyi >0,i ∈{1,2,...,m }. (P=)n’adoncpasdesolutionsrealisables.Sinonmaxz”(y)=0.
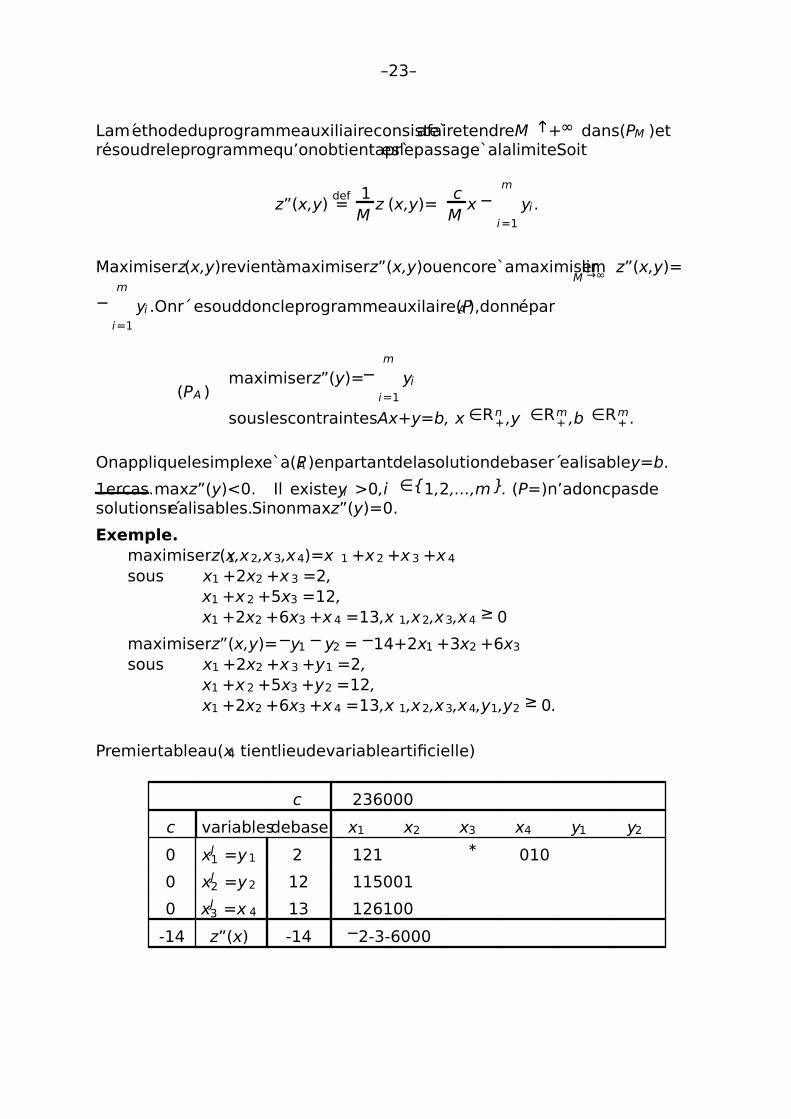
Exemple.maximiserz(x1,x2,x3,x4)=x 1 +x2 +x 3 +x 4
sous x1 +2x2 +x 3 =2,x1 +x 2 +5x3 =12,x1 +2x2 +6x3 +x 4 =13,x 1,x2,x3,x4 ≥ 0
maximiserz”(x,y)=−y1 −y2 = −14+2x1 +3x2 +6x3
sous x1 +2x2 +x 3 +y1 =2,x1 +x 2 +5x3 +y2 =12,x1 +2x2 +6x3 +x 4 =13,x 1,x2,x3,x4,y1,y2 ≥ 0.
Premiertableau(x4 tientlieudevariableartificielle)
c 236000
c variablesdebase x1 x2 x3 x4 y1 y2
0 xJ1 =y1 2 121
∗010
0 xJ2 =y2 12 115001
0 xJ3 =x 4 13 126100
-14 z”(x) -14 −2-3-6000
–24–
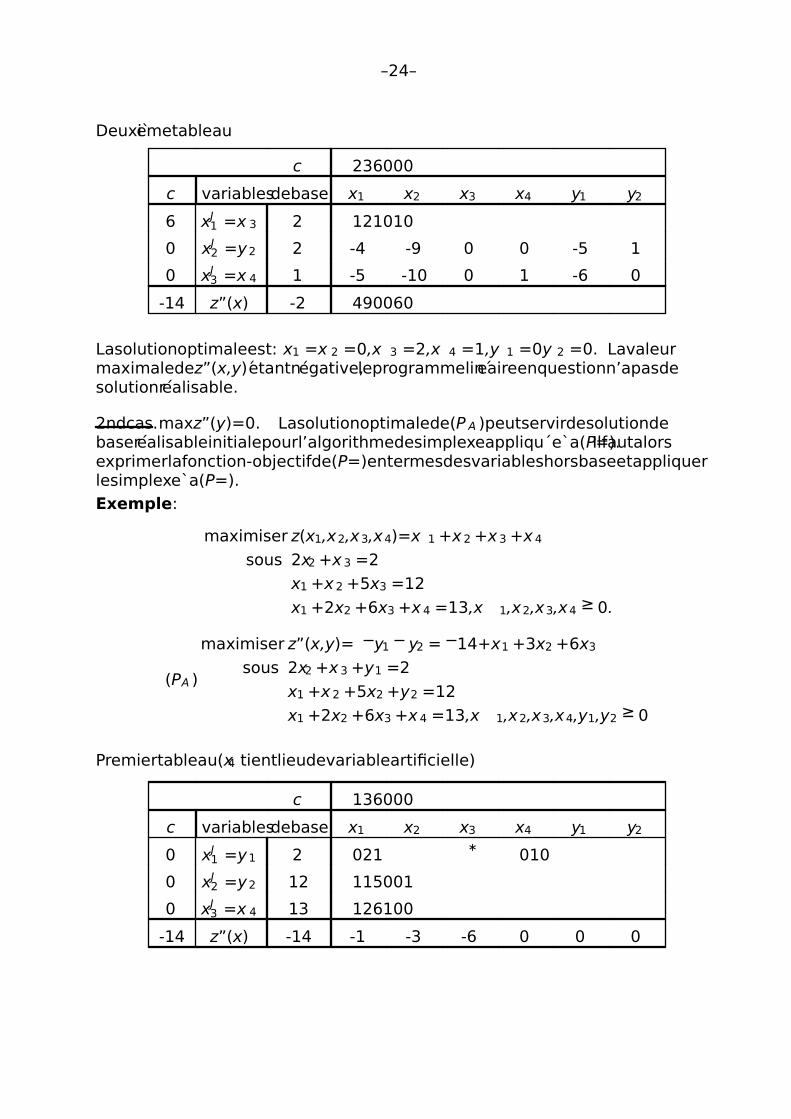
Deuxiemetableau
c 236000
c variablesdebase x1 x2 x3 x4 y1 y2
6 xJ1 =x 3 2 121010
0 xJ2 =y2 2 -4 -9 0 0 -5 1
0 xJ3 =x 4 1 -5 -10 0 1 -6 0
-14 z”(x) -2 490060
Lasolutionoptimaleest: x1 =x 2 =0,x 3 =2,x 4 =1,y 1 =0y 2 =0. Lavaleurmaximaledez”(x,y)etantnegative,leprogrammelineaireenquestionn’apasdesolutionrealisable.
2ndcas.maxz”(y)=0. Lasolutionoptimalede(P A )peutservirdesolutiondebaserealisableinitialepourl’algorithmedesimplexeappliqu´e`a(P=).Ilfautalorsexprimerlafonction-objectifde(P=)entermesdesvariableshorsbaseetappliquerlesimplexe`a(P=).
Exemple:
maximiser z(x1,x2,x3,x4)=x 1 +x 2 +x 3 +x 4
sous 2x2 +x 3 =2
x1 +x 2 +5x3 =12
x1 +2x2 +6x3 +x 4 =13,x 1,x2,x3,x4 ≥ 0.
(PA )
maximiser z”(x,y)= −y1 − y2 = −14+x1 +3x2 +6x3
sous 2x2 +x 3 +y1 =2
x1 +x 2 +5x2 +y2 =12
x1 +2x2 +6x3 +x 4 =13,x 1,x2,x3,x4,y1,y2 ≥ 0
Premiertableau(x4 tientlieudevariableartificielle)
c 136000
c variablesdebase x1 x2 x3 x4 y1 y2
0 xJ1 =y1 2 021
∗010
0 xJ2 =y2 12 115001
0 xJ3 =x 4 13 126100
-14 z”(x) -14 -1 -3 -6 0 0 0
–25–
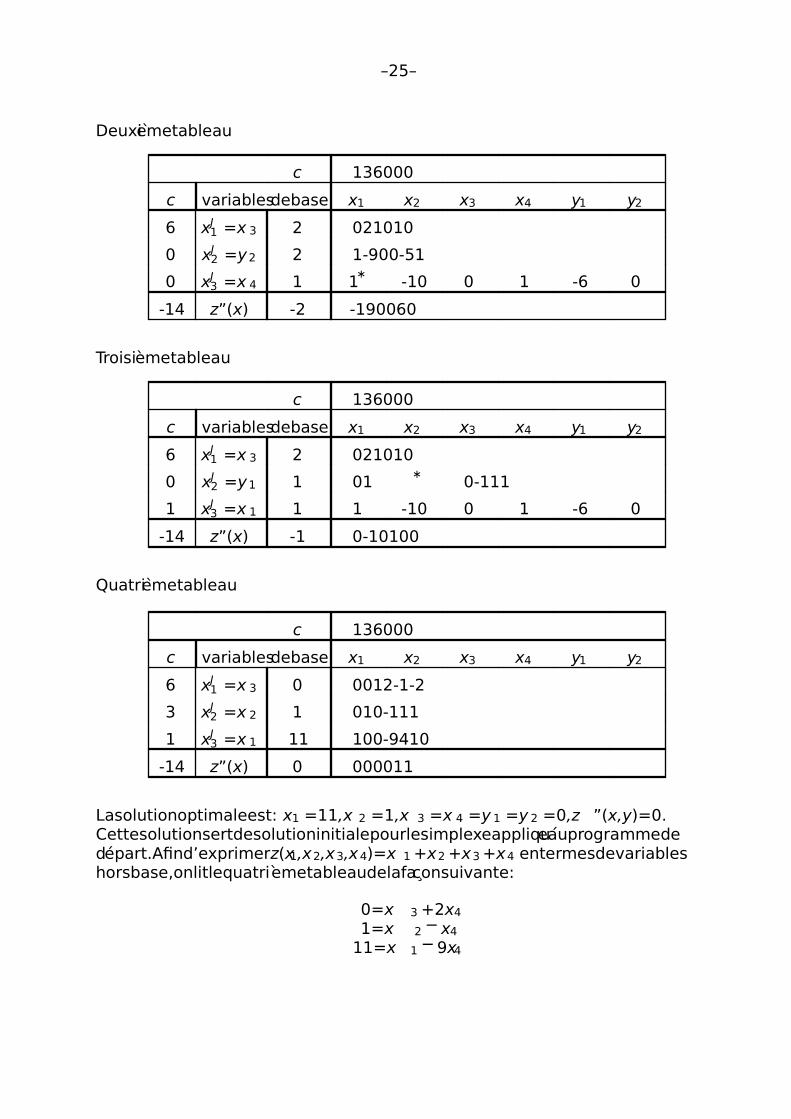
Deuxiemetableau
c 136000
c variablesdebase x1 x2 x3 x4 y1 y2
6 xJ1 =x 3 2 021010
0 xJ2 =y2 2 1-900-51
0 xJ3 =x 4 1 1
∗-10 0 1 -6 0
-14 z”(x) -2 -190060
Troisiemetableau
c 136000
c variablesdebase x1 x2 x3 x4 y1 y2
6 xJ1 =x 3 2 021010
0 xJ2 =y1 1 01
∗0-111
1 xJ3 =x 1 1 1 -10 0 1 -6 0
-14 z”(x) -1 0-10100
Quatriemetableau
c 136000
c variablesdebase x1 x2 x3 x4 y1 y2
6 xJ1 =x 3 0 0012-1-2
3 xJ2 =x 2 1 010-111
1 xJ3 =x 1 11 100-9410
-14 z”(x) 0 000011
Lasolutionoptimaleest: x1 =11,x 2 =1,x 3 =x 4 =y 1 =y 2 =0,z ”(x,y)=0.Cettesolutionsertdesolutioninitialepourlesimplexeappliqu´eauprogrammededepart.Afind’exprimerz(x1,x2,x3,x4)=x 1 +x2 +x3 +x4 entermesdevariableshorsbase,onlitlequatri emetableaudelafaconsuivante:
0=x 3 +2x4
1=x 2 − x4
11=x 1 − 9x4
–26–
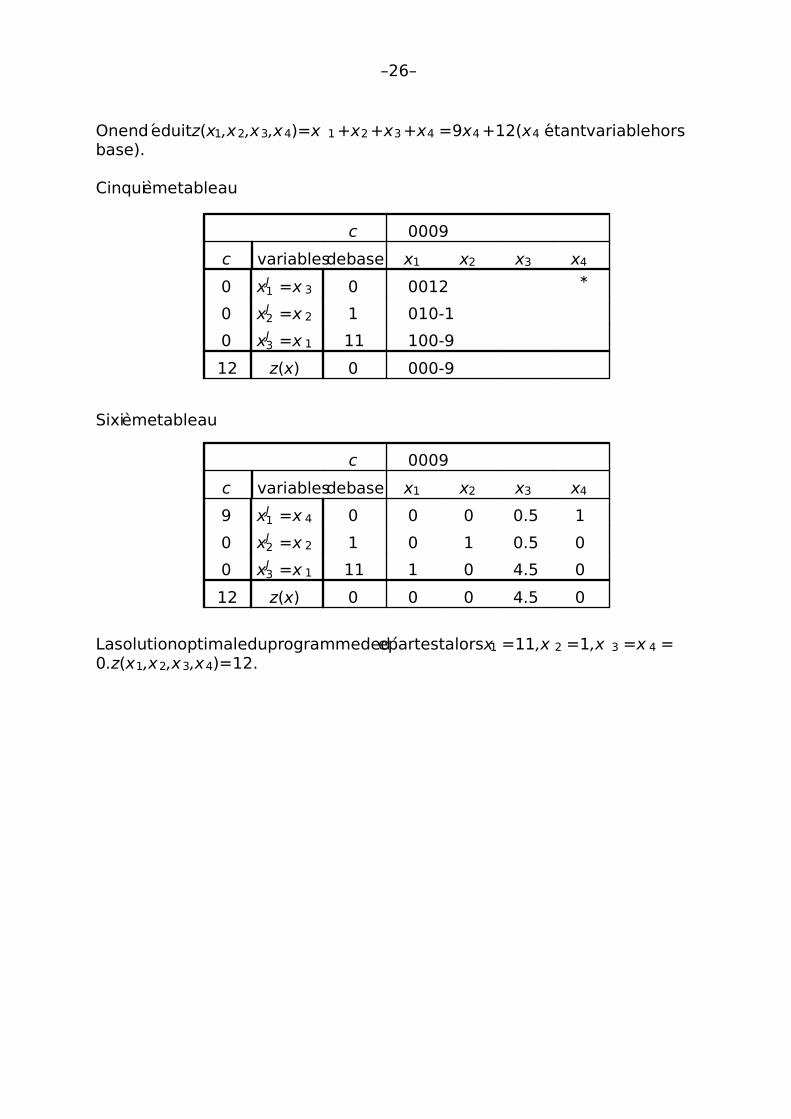
Onend eduitz(x1,x2,x3,x4)=x 1 +x2 +x3 +x4 =9x4 +12(x4 etantvariablehorsbase).
Cinquiemetableau
c 0009
c variablesdebase x1 x2 x3 x4
0 xJ1 =x 3 0 0012
∗
0 xJ2 =x 2 1 010-1
0 xJ3 =x 1 11 100-9
12 z(x) 0 000-9
Sixiemetableau
c 0009
c variablesdebase x1 x2 x3 x4
9 xJ1 =x 4 0 0 0 0.5 1
0 xJ2 =x 2 1 0 1 0.5 0
0 xJ3 =x 1 11 1 0 4.5 0
12 z(x) 0 0 0 4.5 0
Lasolutionoptimaleduprogrammeded´epartestalorsx1 =11,x 2 =1,x 3 =x 4 =0.z(x1,x2,x3,x4)=12.
–27–
II. Programmationlineaire: Dualite, programma-tionennombresentiers,analysepostoptimale.
II.1. Leprogrammelineairedual.Commen¸consparuneinterpr´etationeconomiqueduprogrammedual.Exemple.Problemedelaproduction.Notons:xj nombred’unit´esduproduitP j fabriqueesenentrepriseI(j=1,2,...,n)aij nombred’unitesdelamati erepremiereM i utiliseespourlafabricationd’une
unit´edePjcj beneficedel’entrepriseIenvendantuneunit´edePj .
Leprogrammelineairepourdeterminerleplandeproductionquipermetdemax-imiserlebeneficedel’entrepriseIs’enoncecommesuite:
maximiser z(x)=cx
souslescontraintesdedisponibilit´en
j =1
aij xj ≤ bi (i=1,2,...,m),x j ≥ 0( j=1,2,...,n).
Enformematriciellelescontraintesselisent: Ax ≤ b, x ≥ 0o uA=(a ij ; i=1,2,...,m,j=1,2,...,n),b= t(b1,b2,...,b m).Supposonsquel’entrepriseIIessaiedes’emparerdumarch´e. Sousl’hypoth`esed’uncomportement´economiquedel’entrepriseI,celle-ciestprete`acederlesmatierespremieres`aunprixqui estaumoinsaussi elevequeleb´eneficequ’elleferaenvendantsesproduits.Soityi leprixquel’entrepriseIIdevrapayerpouruneunit´edeMi (i=1,2,...,m).Lescontraintessontlessuivantes:
m
i=1
yi aij ≥ cj (j=1,2,...,n),y i ≥ 0( i=1,2,...,m).
EnformematricielleyA≥ c, y ≥ 0ouy=(y 1,y2,...,y m). L’entrepriseIIessaierademinimiserlecoˆutd’achatdesmatierespremieres: elleessaierademinimiserm
i=1
yi bi .
Leprogrammelineairepourl’entrepriseIIestdoncdeminimiserw(y)def=ybsous
lescontraintesyA≥ c, y ≥ 0.Commeonverrail yaunlienmath´ ematiqueetroitentrelesdeuxprogrammeslineaires.
Definition. Programmeprimal Programmedual
(P)maximiserz(x)=cxsousAx ≤ b, x ∈Rn
+(D)
minimiserw(y)=ybsousyA≥ c, y ∈Rm
+

–28–
Remarque.Onalienssuivants:m=nombredecontraintesde(P)=nombredevariablesde(D),n=nombredevariablesde(P)=nombredecontraintesde(D).Si (P)contientdeuxcontraintes,(D)contientdeuxvariablesetpeutˆetreresolugraphiquementquelquesoitlenombredevariablesde(P).
Quelleestlaformede(D)si(P)n’estpasenformecanonique?Ond´ etermine(D)enramenant(P) alaformecanonique,commelemontrel’exemplesiuvant:
Exemple:
(P)maximiser z(x)=cx
sous Ax=b, x ≥ 0⇐⇒ A−A
x ≤ b−b
,x ≥ 0.
Parlad´efinitionci-dessusledualde(P)estdonnepar
(D) minimiser w(u,v)=(u,v)b
−b=(u − v)b
sous (u,v)A
−A=(u −v)A ≥ c, u,v ∈Rm
+ .
Enposanty=u −v,onobtient
(D)minimiserw(y)=ybsousyA ≥ c, ysansrestrictiondesigne not´e(y).
Ler esultatgeneralestlesuivant. Pourcomprendreprecisementsonmessage,ilconvientd’etudiersapreuve.
Theoreme1.1.Lesliensentreleprogrammeprimaletsondualsontlessuivants:
Primal Dualmaximisation minimisationcoefficientdez secondmembredescontraintessecondmembredescontraintes coefficientdew
contrainte
=≤≥
variable
sanscontraintedesigne≥ 0≤ 0
variable
sanscontraintedesigne≥ 0≤ 0
contrainte
=≥≤
–29–
Preuve.Onsedonne
(P)maximiserz(x,y)=cx+dysousAx+By ≤ a, Cx+Dy=b, x ≥ 0, (y)
(c,x) ∈Rs,d,y ∈Rn−s,Amatricer × s, Bmatricer × (n − s)
matrice(m−r) × s, Dmatrice(m − r) × (n −s).
Ond emontrequeledualde(P)estdonn epar:
(D)minimiserw(u,v)=ua+vbsousuA+vC ≥ c, uB+vD=d, u ≥ 0, (v)
maximiserz(x)=cx+dysousAx+By ≤ a
Cx+Dy=bx ≥ 0, (y)
⇐⇒
maxz(x)=cx+dysousAx+By ≤ a
Cx+Dy ≤ bCx+Dy ≥ b
x ≥ 0, (y)
⇐⇒
maxz(x)=cx+dy 1 − dy2
sousAx+By 1 − By2 ≤ aCx+Dy 1 −Dy2 ≤ b
−Cx −Dy1 +Dy 2 ≤−bx ≥ 0,y 1 ≥ 0,y 2 ≥ 0
⇐⇒
maxz(x)=(c,d, −d)
xy1
y2
sous
AB −BCD −D
−C −DD
xy1
y2
≤
ab
−b
Passonsaudual:
minw(y )=y
ab
−b
sousy
AB −BCD −D
−C −DD
≥ (c,d,−d)
y ≥ 0
⇐⇒ (avecy =(u,v 1,v2))
minw(u,v1,v2)=ua+v 1b−v2b=ua+(v 1 − v2)bsousuA+v1C − v2C=uA+(v 1 −v2)C ≥ c
uB+v 1 D −v2D=uB+(v 1 − v2)D ≥ d−uB − v1D+v 2D= −uB − (v1 −v2)D ≥−du ≥ 0,v 1 ≥ 0,v2 ≥ 0
⇐⇒ (avecv=v1 −v2)
minw(u,v)=ua+vbsousuA+vC ≥ c
uB+vD ≥ d−uB −vD ≥−du ≥ 0, (v)
⇐⇒
minw(u,v)=ua+vbsous uA+vC ≥ c
uB+vD=du ≥ 0, (v)
L’interpretationestalorslasuivante:lacontrainteegalit´ede(P)estCx+Dy=b,etbestli´eavdans( D)qui estunevariablesanscontraintedesigne.Lavariable
–30–
yestsanscontraintedesignedans(P). ElleestfacteurdeBetDqui formentlacontrainteegalitedans(D).
Theoreme1.2.Ledual dudualestleprimal.
Preuve.Pourledualdelad´efinitionci-dessusona
minw(y)=ybsousyA≥ c
y ≥ 0⇐⇒
max − w(y)= t(−b)tysous(−tA)ty ≤−c
y ≥ 0.
Ledualestdoncdonneparminz(x)= −cxsoustx(−tA) ≥ t(−b)
x ≥ 0⇐⇒
max − z(x)=cxsousAx ≤ b
x ≥ 0.
Lad emonstrationdanslecasplusg´eneralduTh eoreme1.2estanalogue.
II.2. Letheoremededualite.Apresavoirdefinileduald’unprogrammelin´eaire,nousetudionsdanscettesectionlesliensentrelessolutionsdeprogrammesendualit´e.
Proposition2.1.Soit(x,y)unesolutionr´ealisablede(P)et(u,v)unesolutionrealisablede(D). Alors:1)z(x,y) ≤ w(u,v)2)z(x,y)=w(u,v)= ⇒ (x,y)et(u,v)sontdessolutionsoptimalesde (P)et(D).
Preuve.1)z(x,y)=cx+dy ≤ (uA+vC)x+(uB+vD)y(D)
=u(Ax+By)+v(Cx+Dy) ≤ ua+vb=w(u,v)(P)
Danscettechained’in´egalitesilestimportantdenoterquex ≥ 0etu ≥ 0.2)ua+vb etantunebornesup´erieurepourz(x,y),l’egalitez(x,y)=ua+vbsignifieque(x,y)estunpointmaximaldez. Raisonnementanaloguepourw(u,v).
Rappelonslestroiscasquipeuventseproduireenappliquantlesimplexe`a(P):
(i)ilexisteune(ouplusieurs)solutionsoptimalesfinies(ii)l’ensembledessolutionsr´ealisablesestnonborn´eetmaxz(x,y)=+∞
(iii)( P)neposs edepasdesolutionsrealisables.
Lem emeraisonnements’applique`a(D). Leth eoremesuivantditquetroiscasseulementseproduisentparmiles9caspossibles(voirtableauci-dessous).
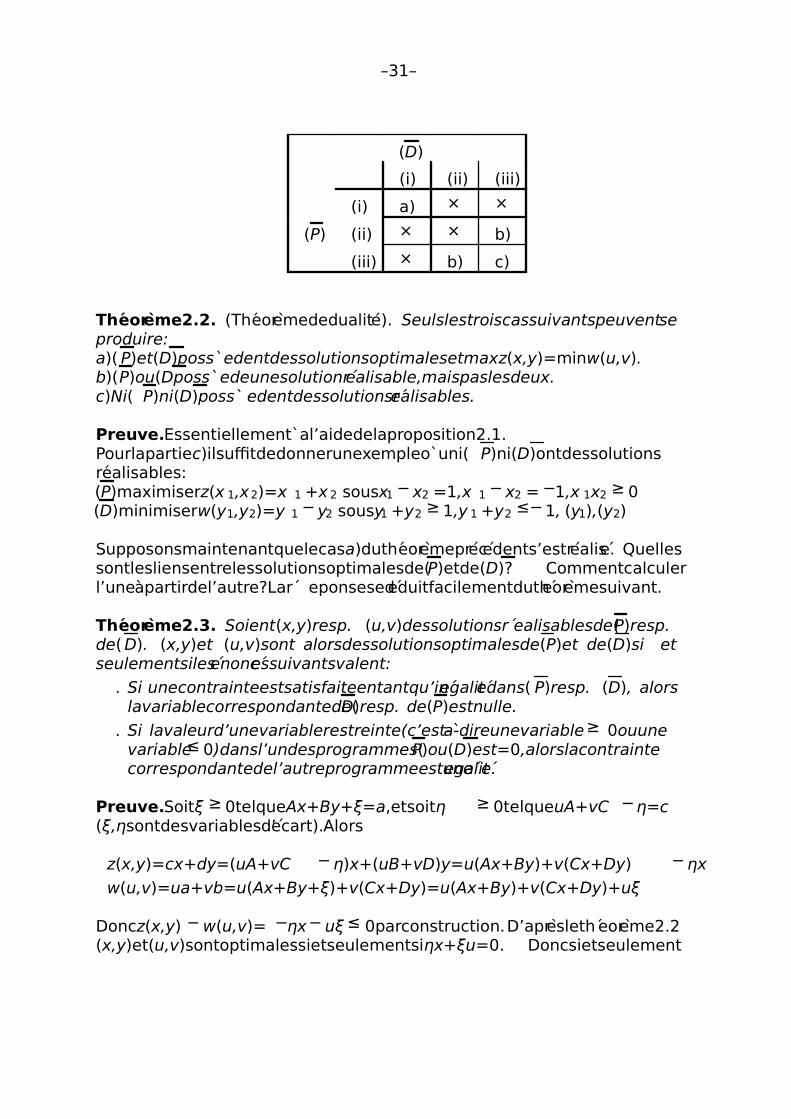
–31–
(D)
(i) (ii) (iii)
(i) a) × ×
(P) (ii) × × b)
(iii) × b) c)
Theoreme2.2. (Theoremededualite). Seulslestroiscassuivantspeuventseproduire:a)( P)et(D)poss`edentdessolutionsoptimalesetmaxz(x,y)=minw(u,v).b)(P)ou(Dposs`edeunesolutionrealisable,maispaslesdeux.c)Ni( P)ni(D)poss` edentdessolutionsr´ealisables.
Preuve.Essentiellement`al’aidedelaproposition2.1.Pourlapartiec)ilsuffitdedonnerunexempleo`uni( P)ni(D)ontdessolutionsrealisables:(P)maximiserz(x 1,x2)=x 1 +x 2 sousx1 − x2 =1,x 1 − x2 = −1,x 1x2 ≥ 0(D)minimiserw(y1,y2)=y 1 −y2 sousy1 +y2 ≥ 1,y 1 +y2 ≤−1, (y1),(y2)
Supposonsmaintenantquelecasa)dutheoremeprecedents’estrealise. Quellessontlesliensentrelessolutionsoptimalesde(P)etde(D)? Commentcalculerl’uneapartirdel’autre?Lar´ eponsesededuitfacilementdutheoremesuivant.
Theoreme2.3. Soient(x,y)resp. (u,v)dessolutionsr ealisablesde(P)resp.de(D). (x,y)et (u,v)sont alorsdessolutionsoptimalesde(P)et de(D)si etseulementsilesenoncessuivantsvalent:
. Si unecontrainteestsatisfaiteentantqu’in´egalitedans( P)resp. (D), alorslavariablecorrespondantede(D)resp. de(P)estnulle.
. Si lavaleurd’unevariablerestreinte(c’est-a-direunevariable≥ 0ouunevariable≤ 0)dansl’undesprogrammes(P)ou(D)est=0,alorslacontraintecorrespondantedel’autreprogrammeestune´egalite.
Preuve.Soitξ ≥ 0telqueAx+By+ξ=a,etsoitη ≥ 0telqueuA+vC −η=c(ξ,ηsontdesvariablesd’ecart).Alors
z(x,y)=cx+dy=(uA+vC − η)x+(uB+vD)y=u(Ax+By)+v(Cx+Dy) −ηx
w(u,v)=ua+vb=u(Ax+By+ξ)+v(Cx+Dy)=u(Ax+By)+v(Cx+Dy)+uξ
Doncz(x,y) − w(u,v)= −ηx− uξ ≤ 0parconstruction.D’apresleth eoreme2.2(x,y)et(u,v)sontoptimalessietseulementsiηx+ξu=0. Doncsietseulement
–32–
siu i ξi =0pourtouti=1,2,...,retη j xj =0pourtoutj=1,2,...,s. L’assertions’ensuit:ξi >0 contrainte= dans (P) ⇒ ui =0variable =0 dans (D)ui >0 variable =0 dans (D) ⇒ ξi =0contrainte = dans (P)ηi >0 contrainte= dans (D) ⇒ xi =0variable =0 dans (P)xj >0 variable =0 dans (P) ⇒ ηj =0contrainte = dans (D)
Exemple.(P)maximiserz(x)=4x1 +5x2
sous3x1 +x 2 ≤ 1,x 1 +4x2 ≤ 1,x 1,x 2 ≥ 0
(D)minimiserw(y)=y1 +y2
sous3y1 +y2 ≥ 4,y 1 +4y2 ≥ 5,y 1,y 2 ≥ 0
solutionoptimalede(P):x=311
,211
· Commentendeduirelasolutionoptimale
de(D)?D’apresleTh eoreme2.3ona
x1 >0 ⇒ 3y1 +y2 =4x2 >0 ⇒ y1 +4y2 =5
⇒ (y1,y2)=(1 ,1)
Doncy1 =y2 =1estsolutionoptimalede(D). Eneffetz311
,211
=2=w(1,1).
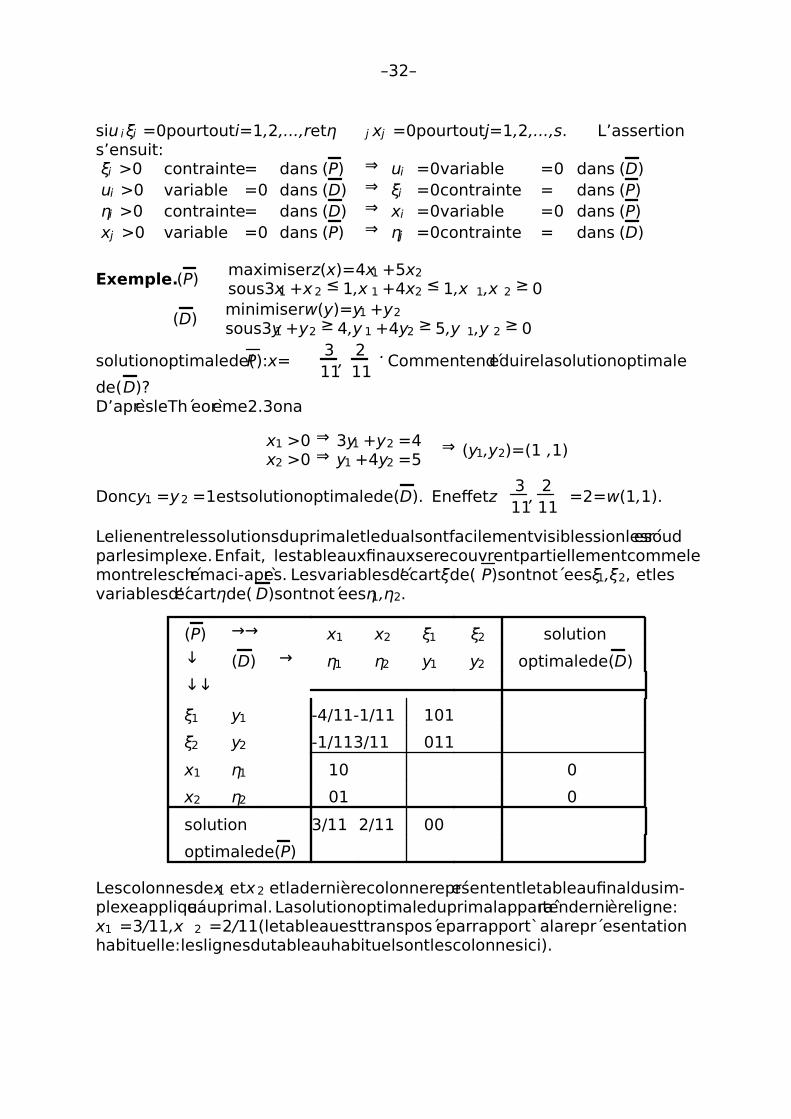
Lelienentrelessolutionsduprimaletledualsontfacilementvisiblessionlesr´esoudparlesimplexe.Enfait, lestableauxfinauxserecouvrentpartiellementcommelemontreleschemaci-apres. Lesvariablesd’ecartξde( P)sontnot eesξ1,ξ2, etlesvariablesd’´ecartηde( D)sontnot eesη1,η2.
(P) →→ x1 x2 ξ1 ξ2 solution
↓ (D) → η1 η2 y1 y2 optimalede(D)
↓↓
ξ1 y1 -4/11-1/11 101
ξ2 y2 -1/113/11 011
x1 η1 10 0
x2 η2 01 0
solution 3/11 2/11 00
optimalede(P)
Lescolonnesdex1 etx2 etladernierecolonnerepr´esententletableaufinaldusim-plexeappliqu´eauprimal. Lasolutionoptimaleduprimalapparaˆıtenderniereligne:x1 =3/11,x 2 =2/11(letableauesttranspos eparrapport`alarepr esentationhabituelle:leslignesdutableauhabituelsontlescolonnesici).

–33–
Leslignesdey1 ety2 etladerni ereligneformentletableauoptimaldusimplexeappliqueaudual. Lasolutionoptimaledudual apparaˆıtenderni erecolonne:y1 =y2 =1.Il n’estdoncpasnecessairederesoudre(P)et(D). Il suffitder esoudre(P)ou(D), lasolutionoptimaledel’autresetrouvedansletableauoptimaldupremier,enderniereligne.Ilsuffitalorsd’identifierlesvariables:
xi → ηi ,ξ i → yi (i=1,2)
–34–
II.3.ProgrammationennombresentiersDans beaucoupdeproblemesd’optimisationunesolutionavaleurs entieresestexigee. Parexempledansleprobl emedelaproduction, o`ul’oncherchelenom-breoptimaldepieces`afabriquereto`ucenombreest,pourdesraisonspratiques,souvententier.L’exemplesuivantmontrealorsquecenombreoptimalentiern’estpastoujoursl’entierleplusprochedelasolutionoptimalesicelle-ciestfractionnaire.
Exemple.maximiser10x1 +11x2,souslacontrainte10x1 +12x2 ≤ 59,x1,x2 ≥ 0`avaleursenti`eres.Lasolutionoptimalexestdonn´eeparx=(x 1,x2)=(5 .9,0). Eneffet, x1 ≤5.9− 1.2x2,etonobtientlasolutionoptimaleenposantx 1 =5.9,x 2 =0. Maislasolutionx =(6,0)n’estpasr ealisableetlasolutionx =(5,0)n’estpasoptimaleparmilessolutionsavaleursentieres. Lasolutionoptimaleavaleursentieresestdonneepar˜x=(1,4).
Les methodespresent´eesci-dessouspour trouverlasolutionoptimale avaleursentieresutilisentlesimplexe`aplusieuresreprises.
II.3.1.Lam ethodeparseparationetevaluation(BranchandBound).
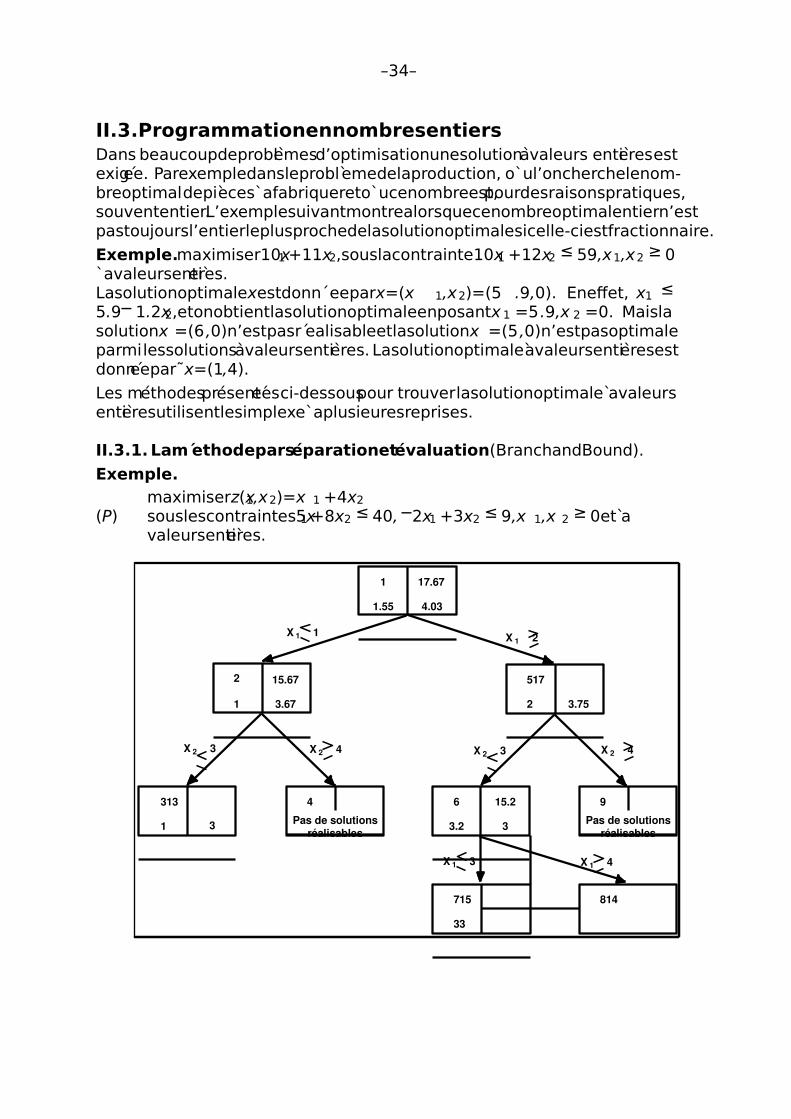
Exemple.
(P)maximiserz(x1,x2)=x 1 +4x2
souslescontraintes5x1 +8x2 ≤ 40,−2x1 +3x2 ≤ 9,x 1,x 2 ≥ 0et avaleursenti`eres.
1 17.67
517
2 3.75
2 15.67
1 3.67
313
1 3
4
Pas de solutionsréalisables
6 15.2
3.2 3
9
Pas de solutionsréalisables
715
33
814
1.55 4.03
X 1 1 X 1 2
X 2 3 X 2 4X 2 3
X 1 3 X 1 4
X 2 4
–35–
Etapes:
1)R esoudre(P) al’aidedusimplexesanstenircomptedelacontraintex 1,x2 `avaleursenti`eres.Solutionoptimale:x=(x 1,x2)=(1 .55,4.03).z(x)=17,67.Brancherparrapportax 1 :x 1 ≤ 1oux 1 ≥ 2.
2)Ajouterlacontraintex1 ≤ 1a(P)etr´esoudreceprogramme`al’aidedusimplexe,sanstenircomptedelacontraintex1,x2 `avaleursenti`eres.Solutionoptimalex=(1,3.67),z(x)=15 .67.Brancherparrapportax 2 :x 2 ≤ 3oux 2 ≥ 4.
3)Ajouter`a(P)lescontraintesx 1 ≤ 1etx 2 ≤ 3. Lasolutionoptimaledeceprogrammeest`avaleursenti`eres: x=(1,3),z (x)=13.Bornera13(c’est-`a-direnepaspoursuivrelebranchementsionobtientdessolutionsoptimales<13).
4)Ajouter`a(P)lescontraintesx 1 ≤ 1etx 2 ≥ 4. Ceprogrammen’apasdesolutionsrealisables.
5)Ajouter`a(P)lacontraintex1 ≥ 2. Lasolutionoptimalex=(2,3.75),z(x)=17.Brancherparrapportax 2 :x 2 ≤ 3oux 2 ≥ 4.
6)Ajouter`a(P)lescontraintesx1 ≥ 2etx2 ≤ 3. Solutionoptimalex=(3.2,3),z (x)=15 .2.Brancherparrapportax 1 :x 1 ≤ 3oux 1 ≥ 4.
7)Ajouter`a(P)lescontraintes2 ≤ x1 ≤ 3etx 2 ≤ 3. Solutionoptimalex=(3,3),z (x)=15.Bornera15.
8)Ajouter`a(P)lescontraintesx 1 ≥ 4etx 2 ≤ 3. Cassansint eretparcequez(x)=14<15pourlasolutionoptimalex.
9)Ajouter`a(P)lescontraintesx1 ≥ 2etx 2 ≥ 4. Pasdesolutionsrealisables.
Lasolutionoptimaleavaleursentieresestdonccelletrouveeen7): x1 =x 2 =3,z (x)=15.
Remarque:Lamethodeparseparationetevaluationn’intervientpasseulementenprogrammationlin´eaire,maisdanstouslesprobl`emesd’optimisation,o`uontravailleavecdesarbresdedecision.
II.3.2.Lam ethodedescoupes.
Exemple: maximiserz(x1,x2)=2x 1 +x 2
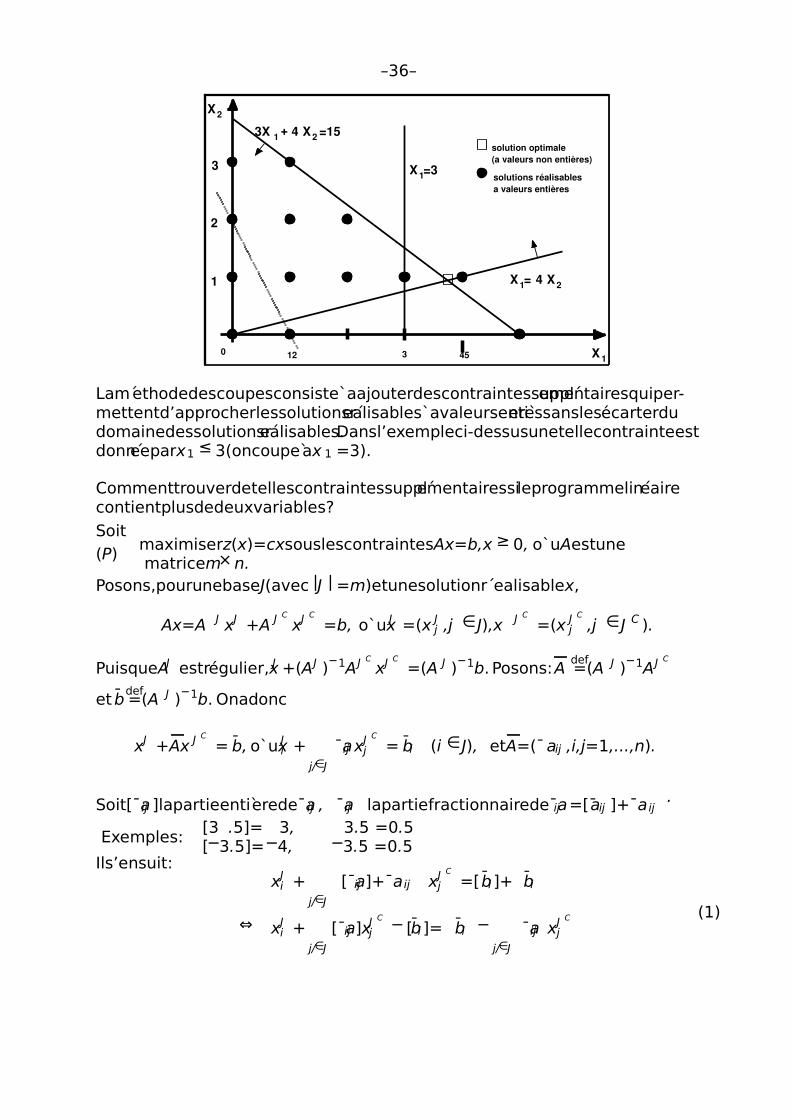
souslescontraintesx1 − 4x2 ≤ 0, 3x1 +4x2 ≤ 15,x1,x2 ≥ 0 avaleursentieres.
–36–
1
2
3
X2
0 12 3 45
3X 1 + =15
X1=3
X24X1=
X24
X 1
solutions réalisables a valeurs entières
solution optimale (a valeurs non entières)
Lamethodedescoupesconsiste`aajouterdescontraintessuppl´ementairesquiper-mettentd’approcherlessolutionsr´ealisables`avaleursenti`eressanslesecarterdudomainedessolutionsr´ealisables.Dansl’exempleci-dessusunetellecontrainteestdonneeparx1 ≤ 3(oncoupe ax 1 =3).
Commenttrouverdetellescontraintessuppl´ementairessileprogrammelineairecontientplusdedeuxvariables?
Soit(P)
maximiserz(x)=cxsouslescontraintesAx=b,x ≥ 0, o`uAestunematricem× n.
Posons,pourunebaseJ(avec |J | =m)etunesolutionr ealisablex,
Ax=A J xJ +A J C
xJ C
=b, o`uxJ =(x Jj ,j ∈J),x J C
=(x J C
j ,j ∈J C ).
PuisqueAJ estregulier,xJ +(AJ )−1A J C
xJ C
=(A J )−1b. Posons:A
def=(A J )
−1AJ C
et bdef=(A J )
−1b. Onadonc
xJ +Ax J C
= b, o`uxJi +j/∈J
¯aij xJ C
j = bi (i ∈J), etA=(¯aij ,i,j=1,...,n).
Soit[¯aij ]lapartieentierede¯aij , ¯aij lapartiefractionnairede¯aij =[ aij ]+¯a ij ·
Exemples:[3 .5]= 3, 3.5 =0.5[−3.5]=−4, −3.5 =0.5
Ils’ensuit:xJ
i +j/∈J
[¯aij ]+¯a ij xJ C
j =[ bi ]+ bi
⇔ xJi +
j/∈J
[¯aij ]xJ C
j− [bi ]= bi −
j/∈J
¯aij xJ C
j
(1)
–37–
Soitx unesolutionrealisablede(P=) avaleursentieres.L’egalite(1)vautpourx,lecˆot´egaucheetantavaleursentieres.Enplus,
xJi +
j/∈J
[¯aij ]xJ C
j≤ xJ
i +j/∈J
¯aij xJ C
j = bi (2)
Commelapartiegauchede(2)est`avaleursenti`eres,
xJi +
j/∈J
[¯aij ]xJ C
j≤ [bi ].
Comme(1)estvalablepourtoutesolutionrealisable,ils’ensuitque:
b −j/∈J
¯aij xJ C
j≤ 0
Proposition3.1.Enajoutant`a(P=),lacontrainte
j/∈J
¯aij xJ C
i≥ bi , (i ∈J)
onn’ecartepasdesolutionsr´ealisables`avaleursentieresdel’ensembledessolutionsrealisables.
Remarque.Commel’exemplesuivantmontre,onarrive alasolutionoptimale`avaleursenti`eresenajoutant, aplusieursreprisessi necessaire,descontraintessupplementairessuivantlapropositionci-dessous.
Exemple.
(P)maximiserz(x1,x2)=2x 1 +x z souslescontraintes− x1 +x 2 ≤ 0,5x1 +2x2 ≤ 18,x 1,x2 ≥ 0entiers
Pourr esoudre(P)procedeparetapes:
1)R esolutionaveclesimplexesanstenircomptedelacondition”x1,x2 `avaleurs
entieres”.Solutionoptimalex=t 187
,187
,0,0.
Tableauinitial
c 2100
cJ variablesdebase x1 x2 x3 x4
0 xJ1 =x 3 0 -1110
0 xJ2 =x 4 18 5201
z(x) 0 -2 -1 0 0
–38–
Tableaufinal
c 2100
cJ variablesdebase x1 x2 00
1 xJ1 =x 2
187 01 5
717
2 xJ2 =x 1
187 10 −2
717
z(x) 547 00 1
737
NouvellecontraintesuivantlaProposition3.1(choisiri=1):
(S1)57x3 +
17x4 ≥ 4
7Pourexprimer(S1)entermesdesvariablesinitialesx1,x2,observerque
187
=x 2 +57x3 +
17x4 ≥ x2 +
47
=⇒ x2 ≤ 2
(voirgraphiqueplusbas)
2)R esolutionde(P), (S1)inclus, parlesimplexe. Exigelepassageparunpro-grammeauxiliaire.
Programmeauxiliaire,tableauinitial
c 00 57
17 -1 0
cJ variablesdebase x1 x2 x3 x4 x5 y
0 xJ1 =x 2
187 01 5
717 00
0 xJ2 =x 1
187 10 −2
717 00
0 xJ3 =y 4
7 00 57
∗ 17 -1 1
−47 z” −4
7 00 −57
−17 10
Lafonction-objectifduprogrammeauxiliaireestdonn´epar:
maximiserz”(y)=−y= −47
+57x3 +
17x4 − x5
Programmeauxiliaire,tableaufinal
c 00 57
17 -1
cJ variablesdebase x1 x2 x3 x4 x5
0 xJ1 =x 2 2 01001
0 xJ2 =x 1
145 100 1
5−2
557 xJ
3 =x 345 001 1
5−7
5
−47 z” 0 00000
–39–
Commemaxz”=0,leprogramme(P)+(S1)prossedeunesolutionrealisable.Elle
estdonneeparx J = t(x1,x2,x3)= t 145
,2,45
Tableaufinalsecondephase
c 000 −25
−15
cJ variablesdebase x1 x2 x3 x4 x5
0 xJ1 =x 2 2 01001
0 xJ2 =x 1
145 100 1
5−2
5
0 xJ3 =x 3
45 001 1
5−7
5385 z 38
5 000 25
15
Lafonction-objectif,exprimeeentermedesvariableshorsbase, estdonneepar
z(x1,x2)=2x 1 +x 2 =385
− 25x4 − 1
5x5
Lasolutionoptimaleestegale`ax= t 145
,2,45,0,0. Nouvellecontrainteselonla
Propositon3.1:
(S2)15x4 +
35x5 ≥ 4
5
Pourexprimerentermesdex1 etdex 2 observerque
145
=x 1 +15x4 − 2
5x5
2=x 2 +x 5
245
=x 1 +x 2 +15x4 +
35x5 ≥ x1 +x 2 +
45
Doncx1 +x 2 ≤ 4(voirgraphiqueplusbas).
3)R esolutionde(P), (S1)et(S2)inclus, exigeanouveaulepassageparunpro-grammeauxiliaire.
Secondephasedusimplexe,tableaufinal
c 000 −13 0 −1
3
cJ variablesdebase x1 x2 x3 x4 x5 x6
0 xJ1 =x 2
23 010 −1
3 0 53
0 xJ2 =x 1
103 100 1
3 0 −23
0 xJ3 =x 3
83 001 2
3 0 −73
0 xJ4 =x 5
43 000 1
3 1 −53
223 z(x) 22
3 000 13 0 1
3
–40–
Lasolutionoptimaleestegale`ax=t 103
,23,83,0,
44,0. Nouvellecontrainteselon
laProposition3.1:
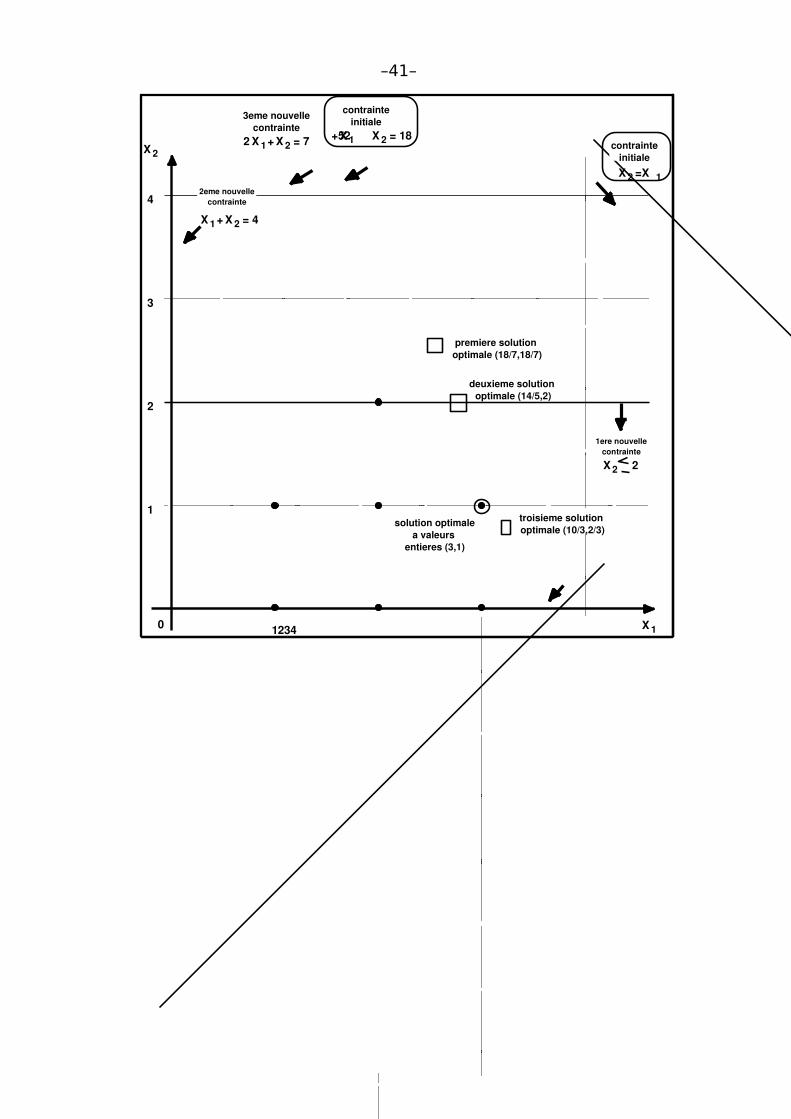
(S3) x4 +x 6 ≥ 1
Exprimeentermesdex1,x2 (S3)selit: 2x1 +x 2 ≤ 7(voirgraphiqueplusbas).
4)R esolutionde(P), (S1),(S2)et(S3)inclus, exigeanouveaulepassageparunprogrammeauxiliaireetm`ene,cettefois,`aunesolutionoptimale`avaleursentieres,quiest
x= t(3,1,2,0,1,1,0),
lasolutionoptimaleavaleursentieresde(P)estdoncdonn´eeparx 1 =3 ,x2 =1,z (x1,x2)=7.
tableaufinaldelasecondephasedusimplexe
c 000000 −12
cJ variablesdebase x1 x2 x3 x4 x5 x6 x7
0 xJ1 =x 2 1 010002 −1
2
0 xJ2 =x 1 3 10000-1 1
2
0 xJ3 =x 3 2 00100-31
0 xJ4 =x 5 1 00001-2 1
2
0 xJ5 =x 6 1 000101 −3
2
7 z(x) 7 000000 12
Surlegraphiqueonvoitque, enajoutantsuccessivement(S1),(S2)et(S3),onn’ecartepasdesolutions`avaleursenti`eres,etoncoupel’ensembledessolutionsrealisablesdefa¸conquelasolutionoptimaleavaleursentieresapparaˆıtcommepointextremal.
–41–
12340
1
2
3
4
X 2
X 2X 1 4=+
X 2X 1 7=+2 X 2X 1 18=+52
X 1
X 2 =X 12eme nouvelle
contrainte
3eme nouvellecontrainte
contrainteinitiale
contrainteinitiale
premiere solution optimale (18/7,18/7)
deuxieme solution optimale (14/5,2)
1ere nouvellecontrainte
X 2 2
troisieme solution optimale (10/3,2/3)
solution optimalea valeurs
entieres (3,1)