-
Recent advances on
sound source
localization using
microphone arrays
Claudio Colangeli – research engineer associate RTD
-
Sound Source LocalizationWhy? …and what?
-
Restricted © Siemens AG 2017
2017.MM.DDPage 3 Siemens PLM Software
Why Sound Source Localization
Increase productivity from troubleshooting to advanced
engineering
Accelerate Sound source localization
• Ad-hoc testing
• I hear something
SSL allows to
• Confirm to work on the right
problem
• One-shot overview of sound
sources
Compare variants
• Contribution of subcomponents
• Quantify sound power
SSL allows to:
• Verify acoustic performance
• Systematically assess
prototypes
• Identify best design
modificationsAdvanced analysis
• SSL as a sensor on a test bench
• Complex environments
SSL allows to:
• Increase engineering insight
• Correlate sound sources with
other data
dBA (W)
40.
110.
79.87.
Increase engineering insight
Verify acoustic performance
Confirm to work on the right problem
-
Restricted © Siemens AG 2017
2017.MM.DDPage 4 Siemens PLM Software
Array-based Sound Source Localization
Portfolio overview
Modular Digital
LMS Sound CameraLMS Circular Array LMS 3D Acoustic
Camera
Customized arrays
Real-time & Compare Localize & Quantify 1 shot 3D view
Productivity
-
Restricted © Siemens AG 2017
2017.MM.DDPage 5 Siemens PLM Software2017. 10. 20
Agenda
Fundamentals of BeamformingBasic ideas for far field array
measurements and acoustic imaging
Clustering Inverse Beamforming
Advanced acoustic imaging applications
-
Fundamentals of
beamforming
Basic ideas for far field array measurements and acoustic
imaging
-
Restricted © Siemens AG 2017
2017.MM.DDPage 7 Siemens PLM Software2017. 10. 20
Acoustic imaging is about
modelling a radiation problem
…
p1
p2
pM
pm
…
(source region) (array plane)
r1
r2
rm
rM
𝑟𝑛𝐼
𝑟𝑛𝐼𝐼
𝑟𝑛
𝑟1
𝑟𝑁
…
p1
p2
pM
pm
…
QI
QII
(source region) (array plane)
r1
r2
rm
rM
𝑟∗
…
p1
p2
pM
pm
…
QI
QII
(array)
r1
r2
rm
rM
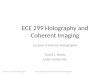
(a) (b) (c)
(a): acoustic source radiation towards a microphone array. (b):
the sources are assumed to be “simple” and belonging to a
source
region called “scan plane”. (c): building the radiation model on
the basis of the physical information available (geometrical:
array
position with respect to the scan plane; acoustical: far-field,
near-field, etc.).
-
Restricted © Siemens AG 2017
2017.MM.DDPage 8 Siemens PLM Software2017. 10. 20
The “Delay & Sum” principlebeamforming in time domain
𝑺𝒌 = 𝑹𝑴𝑺(𝒔𝒌 𝒕 ) 𝑺𝑷𝑳𝒌 = 𝟐𝟎 ∙ 𝒍𝒐𝒈𝟏𝟎𝑺𝒌
𝑺𝒓𝒆𝒇𝒔𝒌 𝒕 =
𝟏
𝑵
𝒋=𝟎
𝑵−𝟏
𝒑𝒋(𝒕 −𝒅𝒋𝒌
𝒄)
Sum
Delay𝑆𝑟𝑒𝑓 = 2 ∙ 10
−5𝑃𝑎
acoustic image
(SPL)
source region
scan point
The “acoustic image” is
created assigning a
value of an acoustic
quantity (such as SPL)
to each scan point of
the source region.
side lobes
main lobe
-
Restricted © Siemens AG 2017
2017.MM.DDPage 9 Siemens PLM Software2017. 10. 20
The “Delay & Sum” principlebeamforming in time domain
𝑺𝒌 = 𝑹𝑴𝑺(𝒔𝒌 𝒕 ) 𝑺𝑷𝑳𝒌 = 𝟐𝟎 ∙ 𝒍𝒐𝒈𝟏𝟎𝑺𝒌
𝑺𝒓𝒆𝒇𝒔𝒌 𝒕 =
𝟏
𝑵
𝒋=𝟎
𝑵−𝟏
𝒑𝒋(𝒕 −𝒅𝒋𝒌
𝒄)
Sum
Delay𝑆𝑟𝑒𝑓 = 2 ∙ 10
−5𝑃𝑎
acoustic image
(SPL)
source region
scan point
The “acoustic image” is
created assigning a
value of an acoustic
quantity (such as SPL)
to each scan point of
the source region.
side lobes
main lobe
-
Restricted © Siemens AG 2017
2017.MM.DDPage 10 Siemens PLM Software2017. 10. 20
Beamformingformulation in frequency domain
nm rrc
j
mn eM
w
1
)(
Steering vectors:
1
1
*
1
1
1111
)()()(
MxM
m
NxMMNmNN
Mnmnn
Mm
H
p
p
p
www
www
www
pwb
(Hermitian conjugate of matrix w)
Source map obtained
at each frequency line
-
Restricted © Siemens AG 2017
2017.MM.DDPage 11 Siemens PLM Software2017. 10. 20
Beamforming and Equivalent Source Methods
are two different acoustic imaging approaches
Sound Pressure Level map
[dB, dBref = 20μPa]
Equivalent sources distribution
[m3/s2]
-
Restricted © Siemens AG 2017
2017.MM.DDPage 12 Siemens PLM Software2017. 10. 20
Direct and inverse methods have advantages and
disadvantages:
because of this, for each application the right tool should be
selected
Direct methods: Inverse methods:
advantages
disadvantages
main advanced
options
pAa HHM
H
a VUCUVC 1H
M
HH
b VUCUVCˆˆˆˆˆˆ pwb
H
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
1
2 3
4 5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
2021
2223
24
25
26
27
28
29
30
31
32
33
34
35
36
Array
x [m]
y [
m]
x [m]
y [
m]
-0.5 0 0.5
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
main lobe
side lobes
HH
NNNMMMNM UVAVUA1
][][][][
Ill-conditioning numerical issues
= =
matrix inversionPoint Spread Function
• Simple formulation
• Robustness
• High localization accuracy
• High dynamic range
• Accurate quantification
• Deconvolution (DAMAS, CIRA, NNLS, etc.)
• CLEAN-SC
• (Functional Beamforming)
• Generalized Acoustic Holography (GAH)
• Clustering Inverse Beamforming (CIB)
• …
-
Restricted © Siemens AG 2017
2017.MM.DDPage 13 Siemens PLM Software2017. 10. 20
Global classification of the acoustic imaging approachesLeclère
et Al. 2017…
International Journal of Aeroacoustics, 2017
-
Clustering Inverse
Beamforming
Generalized Inverse Beamforming
Microphone clustering approach
Optimized solution for uncorrelated
and correlated sources
-
Restricted © Siemens AG 2017
2017.MM.DDPage 15 Siemens PLM Software2017. 10. 20
Generalized Inverse Beamformingan Equivalent Source Method based
on the iterative optimization
of the source region by discarding the insignificant scan
points.
Measurement plane
M array microphones
Calculation plane
N equivalent
sources
𝒓𝒎𝒏 𝒎
𝒏
HH
M
H
a VUCUVC 1
C. Colangeli, P. Chiariotti and K. Janssens.
“Uncorrelated noise source separation using inverse
beamforming.” IMAC (2015).
C. Colangeli. “Clustering Inverse Beamforming and
multi-domain acoustic imaging approaches for
vehicles NVH”. PhD dissertation. 2017
mnrc
j
mn
mn er
A
4
HH
NNNMMMNM UVAVUA1
][][][][
p
a = A+p
𝐸 = [𝑒1, … , 𝑒𝑖 , … , 𝑒𝑀]𝑆 =
𝑠11 0 ⋯ 0
0 𝑠𝑖𝑖 0
⋮ ⋱ ⋮0 0 ⋯ 𝑠𝑀𝑀
de-noising
source separation quantification
r
Mii
MR
ss2
2)(
eigenmodes of the
Cross-Spectral Matrix
iiii
H
M sepESEC
Better localization
and dynamic range
ii
pAa ,iterative process
Suzuki 2008
regularized
radiation matrix inversion
Hansen 1994
Colangeli 2017
22
1~
mm
mmmm
• Quasi-optimality function
• Generalized Cross Validation
• L-Curve
-
Restricted © Siemens AG 2017
2017.MM.DDPage 16 Siemens PLM Software2017. 10. 20
Clustering Inverse Beamformingan Equivalent Source Method based
on the statistical processing
of multiple realizations of inverse beamforming solutions.
𝑎𝑐(𝑖)
= Υ(𝐴, 𝑝𝑖)𝑐
𝛾 𝑖
Clustering Mask Matrix
The clustering mask matrix can
be interpreted as the confidence
level of finding a noise source in a
certain location.
Solution computed
taking sub-
sets(clusters) of the
array data at the time.
Statistical processing
matrixsOccurrence
N
c
ci
N
c
ci
matrixMean
N
c
ci
N
c
ci
i
c
c
c
c
a
a
a
a
1
)(
1
)(
1
)(
1
)(
)(
)~(max
)~(
~max
~
Changing perspective: the Pisa tower “information” remains
almost
unchanged, the rest of the details become less significant.
Colangeli, C. “Clustering Inverse Beamforming and
multi-domain acoustic imaging approaches for
vehicles NVH.” PhD thesis, 2017.
-
Restricted © Siemens AG 2017
2017.MM.DDPage 17 Siemens PLM Software2017. 10. 20
Clustering Inverse Beamformingit allows to identify uncorrelated
and correlated sound sources
𝑎𝑐(𝑖)
= Υ(𝐴, 𝑝𝑖)𝑐
𝛾 𝑖
Clustering Mask Matrix
The clustering mask matrix can
be interpreted as the confidence
level of finding a noise source in a
certain location.
Solution computed
taking sub-
sets(clusters) of the
array data at the time.
Statistical processing
matrixsOccurrence
N
c
ci
N
c
ci
matrixMean
N
c
ci
N
c
ci
i
c
c
c
c
a
a
a
a
1
)(
1
)(
1
)(
1
)(
)(
)~(max
)~(
~max
~
Correlated sources
2000 Hz (1/3rd octave)
Uncorrelated sources
Numerical simulation. S#1 and
S#2 are band-limited (1-10 kHz)
white noise signals. S#2 is
stronger than S#1.
S#1
S#2
Colangeli, C. “Clustering Inverse Beamforming and
multi-domain acoustic imaging approaches for
vehicles NVH.” PhD thesis, 2017.
-
Restricted © Siemens AG 2017
2017.MM.DDPage 18 Siemens PLM Software2017. 10. 20
CIB application on electric vehicle exterior noise
Test performed by SISW in the IPEK
Institut facilities in Karlsruhe
(Germany). Thanks to F. Bianciardi
and M. Sarrazin for sharing the
beamforming dataset.
CONVENTIONAL BEAMFORMING
CIBMask matrix
-
Restricted © Siemens AG 2017
2017.MM.DDPage 19 Siemens PLM Software2017. 10. 20
Tires partial contribution analysis in 1/3rd octave bands
constant speed: 110 km/h
Colangeli, C., Janssens, K., Chiariotti, P., & Castellini,
P.
“CLUSTERING INVERSE BEAMFORMING FOR VEHICLES
NVH.” Proceedings of the ICSV Congress, London, Jul 2017.
-
Restricted © Siemens AG 2017
2017.MM.DDPage 20 Siemens PLM Software2017. 10. 20
CIB application for underbody acoustic imaging of
aero-acoustic sources
Courtesy of KU Leuven
step for generating flow
detachment
flow
Acoustic holography in the near-field can be performed
also adopting an Equivalent Source Method (inverse
method). In the case presented in this slide, Clustering
Inverse Beamforming was used.0-40 10dB /
-
Advanced acoustic
imaging applications
Aero-acoustic source localization in wind tunnel and on the
field
-
Restricted © Siemens AG 2017
2017.MM.DDPage 22 Siemens PLM Software2017. 10. 20
Propeller noise with aircraft in idle on the ground
Propeller noise
Intake noise
Exhausts noise
Measurement campaign performed in Hungary together with
Raphael
Hallez, Jacques Cuenca, Jan Debille and the marketing team.
Goal: comparison of noise and vibration properties of a training
aircraft
powered by: (i) Piston Engine, (ii) Electric Engine.
-
Thanks for [email protected]