Embed Size (px)
Citation preview

Realignment
SPM5- Methods for Dummies 2007
P. Schwingenschuh

Spatial Registration
We use spatial registration to align images: Realigning and unwarping
• Motion correction (realignment) adjusts for an individuals head movements → creates a spatially stabilized image
• But residual errors…..→ unwarping
Co-registration aligns two images of different modalities from the same individual.
Spatial Normalization aligns images from different people.

Realignment
The aim is primarily to remove movement artefact in fMRI time-series.

Reasons for Motion CorrectionReasons for Motion Correction
Subjects will always move in the scanner
The sensitivity of the analysis depends on the residual noise in the image series, so movement that is unrelated to the subject’s task will add to this noise and hence realignment will increase the sensitivity
However, subject movement may also correlate with the task…
…in which case realignment may reduce sensitivity (and it may not be possible to discount artefacts that owe to motion)
Subjects will always move in the scanner
The sensitivity of the analysis depends on the residual noise in the image series, so movement that is unrelated to the subject’s task will add to this noise and hence realignment will increase the sensitivity
However, subject movement may also correlate with the task…
…in which case realignment may reduce sensitivity (and it may not be possible to discount artefacts that owe to motion)

Realign
SPM5 manual: This routine realigns a time-series of images
acquired from the same subject using a least squares approach and a 6 parameter (rigid body) spatial transformation.
The first image in the list specified by the user is used as a reference to which all subsequent scans are realigned.
The reference scan does not have to the the first chronologically and it may be wise to chose a ”representative scan” in this role.

Realignment-2 stepsRealignment-2 steps
Realignment (of same-modality images from same subject) involves two stages:
1. Registration - determining the 6 parameters that describe the rigid body transformation between each source image and a reference image (in fMRI first or representative scan)
2. Transformation (reslicing) - re-sampling each image according to the determined transformation parameters
Realignment (of same-modality images from same subject) involves two stages:
1. Registration - determining the 6 parameters that describe the rigid body transformation between each source image and a reference image (in fMRI first or representative scan)
2. Transformation (reslicing) - re-sampling each image according to the determined transformation parameters

Motion Correction
Motion Correction (‘Realignment’) is crucial: We want to compare same part of the brain
across time. If we do not MC, there will be a lot of
variability in our data. Mathematically,
We assume that all images show the same brain, so rigid body transform is sufficient.
All images have the same contrast.

Rigid body transformation = Euclidean transfromation
Translation
Rotation
They preserve the They preserve the shape of the objects shape of the objects that they act on.that they act on.
By measuring and correcting for translations and rotations, we can adjust for an object`s movement in an image.

How many parameters?
Yaw
Pitch
Roll
ZX
Y
Translation
Rotation
•Each transform can be applied in 3 dimensions.•Therefore, if we correct for both rotation and translation, we will compute 6 parameters.

3D Rigid-body Transformations A 3D rigid body transform is
defined by: 3 translations - in X, Y &
Z directions 3 rotations - about X, Y &
Z axes The order of the operations
matters
1000
0100
00cossin
00sincos
1000
0cos0sin
0010
0sin0cos
1000
0cossin0
0sincos0
0001
1000
Zt100
Y010
X001
rans
trans
trans
ΩΩ
ΩΩ
ΘΘ
ΘΘ
ΦΦ
ΦΦ
TranslationsPitch
about x axisRoll
about y axisYaw
about z axis

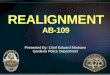
Gauss-newton Optimisation
Works best for least-squares
Minimum is estimated by fitting a quadratic at each iteration

Local Minima Search algorithm is iterative:
1. move the image a little bit.
2. Test cost function
3. Repeat until cost function does not get better.
Search algorithm can get stuck at local minima: cost function suggests that no matter how the transformation parameters are changed a minimum has been reached
Valu
e o
f C
ost
Fu
nct
ion
Local Minimu
mGlobal Minimu
mTranslation in X

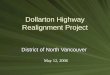
Motion Correction Cost Function
=
ResliceTarget
When aligned, Difference squared = 0
2
ResliceTarget
=
2 When unaligned, Difference squared > 0

Motion correction cost function Motion correction uses variance to check if images
are a good match. Smaller variance = better match (‘least squares’) Iterative: moves image a bit at a time until match is
worse.
Image 1 Image 2 DifferenceVariance
(Diff²)

RealignmentRealignment
Realignment (of same-modality images from same subject) involves two stages:
1. Registration - determining the 6 parameters that describe the rigid body transformation between each image and a reference image (”first or representative scan”)
2. Transformation (reslicing) - re-sampling each image according to the determined transformation parameters
Realignment (of same-modality images from same subject) involves two stages:
1. Registration - determining the 6 parameters that describe the rigid body transformation between each image and a reference image (”first or representative scan”)
2. Transformation (reslicing) - re-sampling each image according to the determined transformation parameters

Transformation
The intensity of each voxel in the transformed image must be determined from the intensities in the original image.
In order to realign images with subvoxel accuracy, the spatial transformations will involve fractions of a voxel.
It is therefore necessary to resample the image at positions between the centers of voxels.
This requires an interpolation scheme to estimate the intensity of a voxel, based on the intensity of its neighbours.

Interpolation The method by which the images are sampled when being
written in a different space. Nearest Neighbour is fastest, not recommended for image realignment.
Takes value of the closest neighboring voxel. Does not correct for intensities at subvoxel displacements.
Bilinear Interpolation is probably OK for PET, but not so suitable for fMRI because higher degree interpolation generally gives better results.
Although higher degree methods provide better interpolation, but they are slower because they use more neighbouring voxels.
Fourier Interpolation is another option, but note that it is only implemented for purely rigid body transformations. Voxel sizes must all be identical and isotropic.
The image–space method that gives the closest results to Fourier interpolation is a full sinc interpolation using every voxel in the image to calculate the new value at a single voxel. (very slow)
B-Splines, since SPM2: degrees 1-7

Application of registration parameters involves re-sampling the image to create new voxels by interpolation from existing voxels
Interpolation can be nearest neighbour (0-order), tri-linear (1st-order), (windowed) fourier/sinc, or in SPM2, nth-order “b-splines”
Application of registration parameters involves re-sampling the image to create new voxels by interpolation from existing voxels
Interpolation can be nearest neighbour (0-order), tri-linear (1st-order), (windowed) fourier/sinc, or in SPM2, nth-order “b-splines”
2. Transformation (reslicing)2. Transformation (reslicing)
d1 d2
d3
d4
v1
v4
v2
v3
Nearest Neighbour
Linear
Full sinc (no alias)
Windowed sinc

B-Spline Interpolation
A continuous function is represented by a linear
combination of basis functions
Improves both computational speed and accuracy

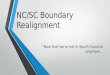
Interpolation Simulation
Results after 10 time 5° rotation and return
No bilinear B-Spline
Errors

Interpolation errors, especially with tri-linear interpolation and small-window sinc
Ghosts (and other artefacts) in the image (which do not move as a rigid body)
Rapid movements within a scan (which cause non-rigid image deformation)
Spin excitation history effects (residual magnetisation effects of previous scans)
Interaction between movement and local field inhomogeniety, giving non-rigid distortion → "Unwarp"
Interpolation errors, especially with tri-linear interpolation and small-window sinc
Ghosts (and other artefacts) in the image (which do not move as a rigid body)
Rapid movements within a scan (which cause non-rigid image deformation)
Spin excitation history effects (residual magnetisation effects of previous scans)
Interaction between movement and local field inhomogeniety, giving non-rigid distortion → "Unwarp"
Residual Errors after RealignmentResidual Errors after Realignment

Sources & References & So On…
SPM for Dummies 2006 Rik Henson’s SPM minicourse John Ashburner’s lecture on spatial
preprocessing (SPM course USA 2005) Human Brain Function, 2nd Edition (Edited
by J Ashburner, K Friston, W Penny) – mostly chapter 2.
SPM5 manual

UnwarpingUnwarping
Antoinette Nicolle

Pre-processing stepsPre-processing steps Voxel-based analysis assumes that the data Voxel-based analysis assumes that the data
from a particular voxel all derive from the same from a particular voxel all derive from the same part of the brainpart of the brain
So, for within-subject and between-subject So, for within-subject and between-subject comparisons we need:comparisons we need: Slice time correctionSlice time correction RealignmentRealignment to ‘undo’ the effects of subject motion to ‘undo’ the effects of subject motion Co-registrationCo-registration NormalisationNormalisation SmoothingSmoothing

After RealignmentAfter Realignment
In extreme cases, up to 90% of the variance in In extreme cases, up to 90% of the variance in fMRI time-series can be accounted for by effects fMRI time-series can be accounted for by effects of movement of movement afterafter realignment. realignment. Results in loss of sensitivityResults in loss of sensitivity
This can be due to non-linear distortion from This can be due to non-linear distortion from magnetic field inhomogeneitiesmagnetic field inhomogeneities i.e. does not fit with the rigid-body assumption of i.e. does not fit with the rigid-body assumption of
realignment.realignment.

Field inhomogeneitiesField inhomogeneities Different tissues have different magnetic susceptibilitiesDifferent tissues have different magnetic susceptibilities These distortions are most noticeable near air-tissue These distortions are most noticeable near air-tissue
interfaces (e.g. OFC and anterior MTL)interfaces (e.g. OFC and anterior MTL) Field inhomogeneities have the effect that locations on Field inhomogeneities have the effect that locations on
the image are ‘deflected’ with respect to the real object.the image are ‘deflected’ with respect to the real object.

Susceptibility-by-motion interactions Variance caused by Variance caused by the susceptibility-by-motion the susceptibility-by-motion
interaction interaction When inhomogeneities are present in the field, the When inhomogeneities are present in the field, the
signal will not change linearly with subject positionsignal will not change linearly with subject position
EPI images will be a warped version EPI images will be a warped version of reality (like a fairground mirror) and of reality (like a fairground mirror) and this deformation will be this deformation will be non-rigid with non-rigid with motionmotion

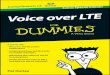
Covarying for movement-related Covarying for movement-related errors after realignmenterrors after realignment
One solution is to include the estimated movement One solution is to include the estimated movement parameters as covariates in the design matrixparameters as covariates in the design matrix But problems when movements are correlated with But problems when movements are correlated with
the task, since this strategy will discard “good” and the task, since this strategy will discard “good” and “bad” variance alike“bad” variance alike
tmax=13.38
No correction
tmax=5.06
Correction by covariation

So how does SPM do it..?So how does SPM do it..? A A deformation fielddeformation field indicates the directions and indicates the directions and
magnitudes of location deflections throughout the field (Bmagnitudes of location deflections throughout the field (B00) ) with respect to the real object.with respect to the real object.
We can create this with the We can create this with the “Fieldmap” toolbox.“Fieldmap” toolbox.
NextNext – find the derivatives of the deformations with respect – find the derivatives of the deformations with respect to subject movementto subject movement
igl.stanford.edu/~torsten/ct-dsa.html

The susceptibility-by-motion interactionThe susceptibility-by-motion interaction In practice, rather than generating a statistical field map for every In practice, rather than generating a statistical field map for every
image in the EPI data set, we compute how image in the EPI data set, we compute how oneone map is warped over map is warped over subsequent scans.subsequent scans.
Computing how the images are warped over subsequent scans Computing how the images are warped over subsequent scans requires knowing how the deformation fields change with requires knowing how the deformation fields change with displacement of the subject, i.e. the derivatives of deformation with displacement of the subject, i.e. the derivatives of deformation with respect to subject motion.respect to subject motion.
UNWARPUNWARP
attempts to do this and then re-samples the voxels accordinglyattempts to do this and then re-samples the voxels accordingly

How does it do it?How does it do it?
The field BThe field B00, which changes as a function of , which changes as a function of
displacement displacement ∆∆θθ, , ∆∆φφ, can be modelled by the first two , can be modelled by the first two terms of a Taylor expansionterms of a Taylor expansion
BB00((, ) = B) = B00 ( (, ) + [() + [(δδBB00/ / δδ) + ( (δδBB00/ / δδ ) ) ]]
The ‘static’ deformation field, which is the same throughout the time series.
Calculated using ‘Fieldmap’ in SPM
Changes in the deformation field with subject movement. Estimated via iteration. Procedure in UNWARP.

Applying the deformation field to the imageApplying the deformation field to the image
Once the deformation field has been Once the deformation field has been modelled over time, the time-variant field modelled over time, the time-variant field is applied to the image.is applied to the image.
This allows us to assume that voxels This allows us to assume that voxels over time are corresponding to the same over time are corresponding to the same parts of the brain, increasing the parts of the brain, increasing the sensitivity of our analysis.sensitivity of our analysis.

In practice…In practice…
Subject movements are quite smallSubject movements are quite small With the latest scanners, distortions are With the latest scanners, distortions are
typically quite small, and distortion-by-typically quite small, and distortion-by-motion interactions even smallermotion interactions even smaller
Small distortions result from:Small distortions result from:a)a) Fast gradientsFast gradients
b)b) Low field (i.e. <3T)Low field (i.e. <3T)
c)c) Low resolution (smoothing)Low resolution (smoothing)

Assumptions of UnwarpAssumptions of Unwarp That the susceptibility-by-motion interaction is That the susceptibility-by-motion interaction is
responsible for a sizeable part of the residual responsible for a sizeable part of the residual movement-related variance.movement-related variance.But:But: Subject movement between slice acquisition Subject movement between slice acquisition
(slice-to-vol effects)(slice-to-vol effects) Susceptibility-dropout-by-motion interactionSusceptibility-dropout-by-motion interaction Spin-history effectsSpin-history effects
Note also that the deformation field does not Note also that the deformation field does not give us the “true” version of the time-series, but give us the “true” version of the time-series, but rather a level of rather a level of averageaverage distortion. distortion.

ReferencesReferences
http://www.fil.ion.ucl.ac.uk/spm/toolbox/unwarp/http://www.fil.ion.ucl.ac.uk/spm/toolbox/unwarp/ Slides by Mary Summers (MfD 2006)Slides by Mary Summers (MfD 2006) John Ashburner’s slides John Ashburner’s slides
http://www.fil.ion.ucl.ac.uk/spm/course/#slideshttp://www.fil.ion.ucl.ac.uk/spm/course/#slides Andersson JLR, Hutton C, Ashburner J, Turner Andersson JLR, Hutton C, Ashburner J, Turner
R, Friston K (2001) Modelling geometric R, Friston K (2001) Modelling geometric deformations in EPI time series. Neuroimage deformations in EPI time series. Neuroimage 13: 903-91913: 903-919
http://www.cis.rit.edu/htbooks/mri/index.html (J http://www.cis.rit.edu/htbooks/mri/index.html (J Hornak’s tutorial)Hornak’s tutorial)