Embed Size (px)
DESCRIPTION
Real-Time ROMS Ensembles and adaptive sampling guidance during ASAP. Sharanya J. Majumdar RSMAS/University of Miami Collaborators: Y. Chao, Z. Li, J. Farrara, P. Li, P. Lermusiaux, C. Bishop ASAP Hot Wash, 11/1/06-11/3/06. Why Use Ensembles?. To quantify uncertainty in flow - PowerPoint PPT Presentation
Citation preview
Real-Time ROMS Ensembles and adaptive sampling guidance
during ASAP
Sharanya J. Majumdar
RSMAS/University of MiamiCollaborators: Y. Chao, Z. Li, J. Farrara,
P. Li, P. Lermusiaux, C. Bishop
ASAP Hot Wash, 11/1/06-11/3/06

Why Use Ensembles?
• To quantify uncertainty in flow– Degree of confidence in prediction– Probabilistic forecast
• Adaptive Sampling– Use ensemble-based error statistics to predict
locations in which extra sampling is required
• Data Assimilation– Flow-dependent error covariance matrix
• Synoptic and Sensitivity Analysis

Progress Prior to ASAP
• Software developed at JPL to produce ensembles of 3-nested ROMS– Atmospheric wind stress perturbations
– Oceanic initial condition perturbations (breeding)
• What we learned (2003-5)– 3-nested ROMS cumbersome (7 forecasts per day)
– Realistic atmospheric perturbations produce minimal change in 48-hour ROMS forecast
– Higher sensitivity to initial ocean conditions
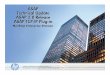
ROMS ensembles in ASAP
• Goal: to provide automated real-time daily ensembles and adaptive sampling guidance
• Single-domain ROMS– 1.67km resolution– Lateral boundary conditions provided by
average of operational 3-nested ROMS forecast– No atmospheric wind stress perturbations– Initial condition perturbations produced by
‘breeding’ technique
• 32-member ensemble

ROMS Analysis and Forecast
Forecast perturbations1-day ROMS ensemble forecast from previous day
Rescale to yield Analysis Perturbations
Variance and ETKF data files and graphics uploaded to OurOcean
ETKF adaptive sampling
Post-process ensemble
New initial ensemble
2-day ROMS ensemble forecast2-day COAMPS wind forecast

Timeline
• 29 July-10 Aug: added new ensemble members.
• 13 Aug-13 Sep: Daily 32-member ROMS ensembles available by 9am PDT on http://ourocean.jpl.nasa.gov/MB06/
• Fully automated.

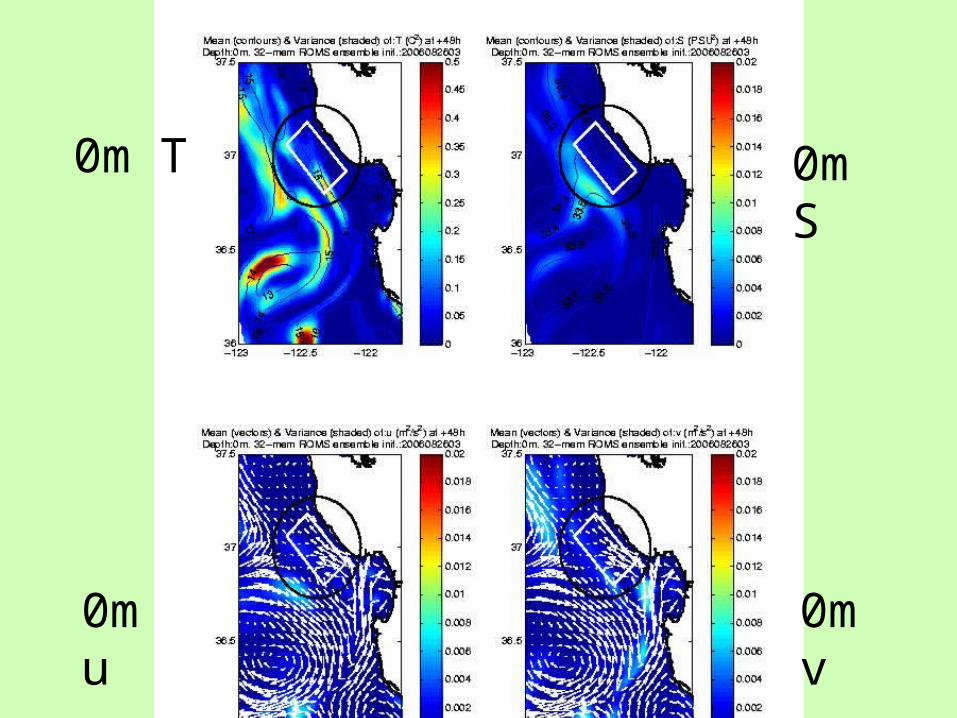
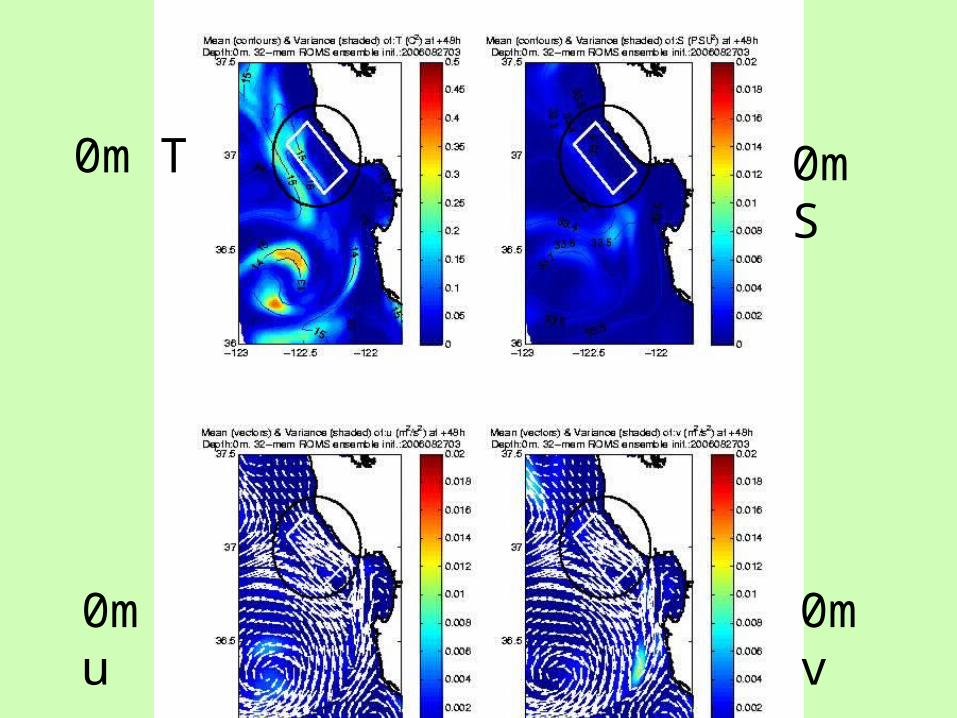
Ensemble Variance
• Prediction of ‘uncertainty’ in a forecast.
• Next few slides show 48-h forecast mean and variance fields for ensembles initialized between 22-28 August 2006.

0m S
0m u 0m v
0m T

0m S
0m u 0m v
0m T

0m S
0m u 0m v
0m T

0m S
0m u 0m v
0m T
0m S
0m u 0m v
0m T
0m S
0m u 0m v
0m T

0m S
0m u 0m v
0m T
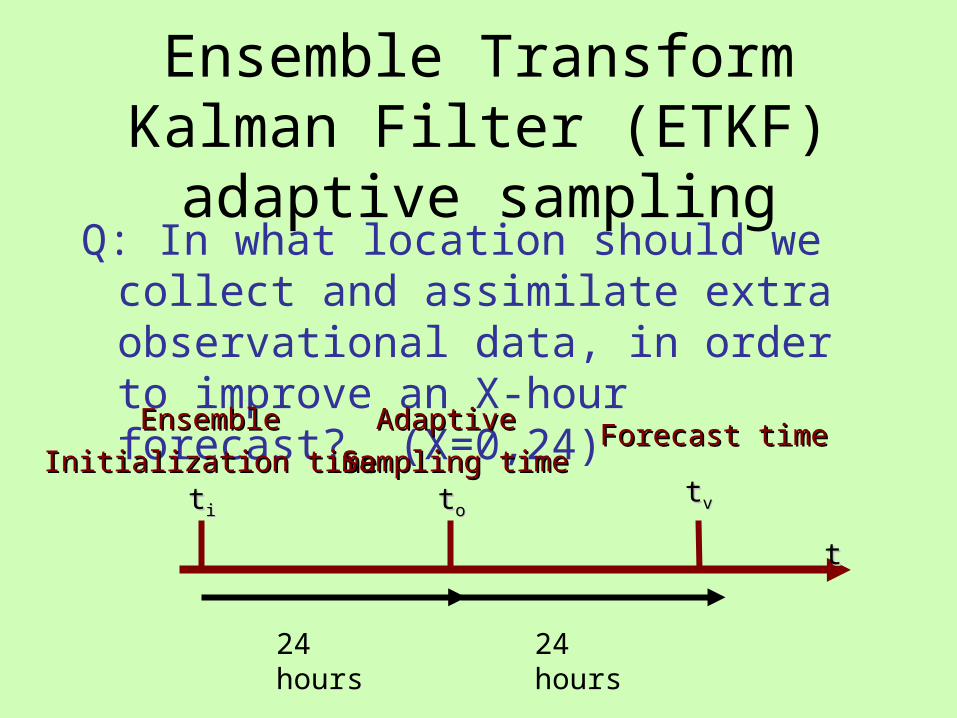
Ensemble Transform Kalman Filter (ETKF) adaptive sampling
Q: In what location should we collect and assimilate extra observational data, in order to improve an X-hour forecast? (X=0,24)
ttii ttoottvv
EnsembleEnsemble
Initialization timeInitialization time
Adaptive Adaptive
Sampling timeSampling timeForecast timeForecast time
tt
24 hours 24 hours

Observe T and S on 23 Aug 2006

Observe T and S on 24 Aug 2006

Observe T and S on 25 Aug 2006

Observe T and S on 26 Aug 2006

Observe T and S on 27 Aug 2006

Observe T and S on 28 Aug 2006

Observe T and S on 29 Aug 2006
Review of Performance
• Automation and timely delivery worked well.
• Variance and adaptive sampling guidance seemed qualitatively reasonable.
• Cut corners: no perturbations in lateral boundary conditions, wind stress, heat flux etc.

The Future: Short Term
• Re-run ROMS ensemble for 2003 and 2006– Using new ROMS reanalysis– Stable analysis error variance?– Is ensemble variance a good predictor of
forecast error?
• Evaluate ETKF adaptive sampling– Qualitative evaluation of sensitive areas– Quantitative evaluation of whether ETKF can
predict reduction in forecast error variance (using ROMS data denial)

Papers to be completed
1. ROMS ensembles: AOSN-II and ASAP
2. ETKF adaptive sampling, interpretation and evaluation of guidance
3. Adaptive sampling review, comparison of ESSE and ETKF
4. Response of ocean model to changes in atmospheric forcing
The Future: Long Term
• Observing System Simulation Experiments– Couple adaptive sampling guidance to AUV
survey error metrics (Zhang/Bellingham)– Test hypothetical configurations of glider
arrays (Leonard, Lermusiaux)– Work with REMUS AUV (Moline)